Embed Size (px)
Citation preview

Dragan-Goca-Nenad
SADRZAJ
I Statika 3
1 Uvod 51.1 Istorijat . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Pojam krutog tela i sistema. Zadaci statike . . . . . . . 6
2 Osnovni pojmovi i definicije 92.1 Sila. Njutnovi principi . . . . . . . . . . . . . . . . . . 9
2.1.1 Vrste sila . . . . . . . . . . . . . . . . . . . . . 102.1.2 Sistem sila. Rezultanta . . . . . . . . . . . . . . 122.1.3 Veze, vrste veza i njihove reakcije . . . . . . . . 132.1.4 Princip osloba -danja od veza . . . . . . . . . . . 142.1.5 Primeri idealnih veza . . . . . . . . . . . . . . . 15
2.2 Moment sile za tacku . . . . . . . . . . . . . . . . . . . 212.2.1 Svojstva momenta sile za tacku . . . . . . . . . 232.2.2 Analiticko odre -divanje momenta sile za tacku . 23
2.3 Moment sile za osu . . . . . . . . . . . . . . . . . . . . 252.3.1 Svojstva momenta sile za osu . . . . . . . . . . 26
2.4 Spreg sila . . . . . . . . . . . . . . . . . . . . . . . . . 292.5 Redukcija sile na tacku. Torzer . . . . . . . . . . . . . 31

Dragan-Goca-Nenad
2
2.5.1 Redukcija sile na tacku . . . . . . . . . . . . . . 312.5.2 Glavni vektor, glavni moment. Torzer . . . . . . 32
2.6 Osnovni staticki elementi . . . . . . . . . . . . . . . . . 342.7 Uslovi ravnoteze . . . . . . . . . . . . . . . . . . . . . . 35
2.7.1 Ravanski sistem sila . . . . . . . . . . . . . . . 362.7.2 Suceljni sistem sila . . . . . . . . . . . . . . . . 36
3 Gredni nosaci 373.1 Gredni nosac opterecen u svojoj ravni . . . . . . . . . . 37
3.1.1 Oblici veza i neke vrste grednih nosaca. Reakcijeveza i staticka odredenost nosaca . . . . . . . . 37
3.2 Linijsko raspodeljeno opteretenje . . . . . . . . . . . . 413.3 Sile u preseku . . . . . . . . . . . . . . . . . . . . . . . 423.4 Veza izme -du linijski raspodeljenog opterecenja, transverzalne
sile i momenta savijanja . . . . . . . . . . . . . . . . . 453.5 Gredni nosac opterecen torzionim spregovima . . . . . 47
3.5.1 Oblici veza. Staticka odre -denost nosaca . . . . . 473.6 Moment torzije . . . . . . . . . . . . . . . . . . . . . . 51
Registar pojmova 53

Dragan-Goca-Nenad
Deo I
Statika

Dragan-Goca-Nenad

Dragan-Goca-Nenad
GLAVA
1
UVOD
1.1 Istorijat
Mehanika je nauka koja se bavi postavljanjem modela koji predstavl-jaju tela (u prirodi) i proucava njihovo kretanje pod dejstvom razlicitihmehanickih uticaja. Pojam ”mehanika” prvi je uveo Aristotel (384-322p.n.e.) u delu ”Problemi mehanike”. Me -dutim, za osnivaca se mozesmatrati Arhimed iz Sirakuze (287-212 p.n.e.), koji je uocio osnovnasvojstva sile i u delu ”O ravnotezi” postavio teoriju poluge. On jeizmislio: kotur, cekrk, zavrtanj, kao i mnoge druge proste masine. Ipakje tek I. Njutn1 (1643-1727) matematicki formulisao osnovne principetakozvane klasicne mehanike. Zbog toga se klasicna mehanika ponekadzove i Njutnova mehanika. Njutnovi aksiomi su i danas osnova svihinzenjerskih mehanickih proracuna.
Treba napomenuti da su se u 20. veku razvile i mehanika teorije
1U delu ”Philosophiae naturalis principia” (1687) Njutn je izlozio cuvene ak-siome klasicne mehanike.

Dragan-Goca-Nenad
6 1 Uvod
relativnosti (A. Ajnstajn, 1905.), koja se odnosi na tela koja se krecubrzinom bliskoj brzini svetlosti, i takozvana kvantna mehanika, koja sebavi izucavanjem kretanja mikro delica (na primer elektrona). Principikoji vaze u ovim novim disciplinama razlikuju se od Njutnovih ali ih,srecom, u inzenejrskoj praksi, ne ugrozavaju.
Klasicna mehanika zasniva se na veoma malom broju opstevazecihprincipa. Ipak, iz nje se razvio veliki broj posebnih, ali u biti srodnih,disciplina i to uglavnom po dve osnove: zavisno od karaktera kretanjatela i od svojstva materijala od koga su sacinjeni.
Prema karakteru kretanja tela, mahanika se deli na statiku i di-namiku, sa brojnim podoblastima. Statika se bavi izucavanjem uslovamirovanja (ravnoteze), dok dinamika2 izucava zakone kretanja materi-jalnih tela.
Prema modelu koji razmatra mehanika se deli na:
- mehaniku krutih tela, tj. tela cija se deformacija, iz bilo kojihrazloga, opravdano zanemaruje,
- mehanika cvrstih (deformabilnih) tela. Discipline koje se baveovom problematikom su, na primer: teorija elasticnosti, plasticnosti,viskoelasticnosti itd.;
- mehanika fluida (tecnosti i gasovi).
Ove podele treba prihvatiti uslovno. Njihova lista bi mogla bitiznatno sira, ali i drugacija.
1.2 Pojam krutog tela i sistema. Zadaci
statike
Statika je oblast mehanike u kojoj se izucava ravnoteza jednog ili visekrutih tela na koja deluju sile.
Pod ravnotezom se podrazumeva da se telo ne krece u odnosu naokolinu.
2Razvoj dinamike zapoceo je znatno kasnije, tek u XVI veku, a najvece zaslugese pripisuju G. Galileju (1564-1642), zatim I. Njutna, L. Ojleru (1707-1783), kao iZ. Dalamberu (1717-1783) i Z. Lagranzu (1736-1813).

Dragan-Goca-Nenad
1.2 Pojam krutog tela i sistema. Zadaci statike 7
Kruto telo je takvo telo koje se pod ma kako velikim optrecenjemne deformise, tj. rastojanje izme -du ma koje dve tacke tog (opterecenog)tela ostaje nepromenjeno. Ako se to rastojanje menja, telo se zovedeformabilno, bilo da se redi o cvrstom telu ili fluidu.
Treba napomenuti da za uravnotezena deformabilna tela mogu dase primene isti uslovi ravnoteze kao i za kruta tela, pa se ogranicenjena bavljenje statike (nepostojecim) krutim telima ne suzava prostor zanjenu primenu.
Sistem krutih tela, ili kratko sistem, naziva se jedno ili visekrutih tela cija se ravnoteza (kretanje) izucava. Sve sto ne pripadaodabranom sistemu (ostatak univerzuma) zove se spoljasnji svet.
Kao sto se vidi, izbor je prepusten onom ko resava problem. Ali,istovremeno, taj izbor treba izvrsiti tako da:
- omogucuje da se do trazenog resenja uopste do -de i
- da nacin resavanja bude sto jednostavniji.
Dva osnovna zadatka statike su:
- slaganje sila i svo -denje datog sistema sila na prostiji oblik i
- naci uslove pod kojim ce telo, na koje deluje sistem sila, ostati uravnotezi.
Statika je oblast mehanike u kojoj se izucava ravnoteza jednog ilivise krutih tela na koja deluju sile. Za telo se kaze da je u ravnotezikada se ono ne krece (miruje) u odnosu na okolinu.
Za deformabilna tela u ravnotezi mogu se primeniti isti uslovi ravnotezekao i za kruta tela.

Dragan-Goca-Nenad
8 1 Uvod

Dragan-Goca-Nenad
GLAVA
2
OSNOVNI POJMOVI IDEFINICIJE
2.1 Sila. Njutnovi principi
Pojam ”sila” cesto se koristi u svakodnevnom zivotu da izrazi: jacinu,moc ili uzrok promene stanja kretanja ili mirovanja tela.
U mehanici se pod pojmom sila podrazumeva uzrok koji menjastanje kretanja ili mirovanja tela. Ako se telo nalazi u miru, ondace se ono pod dejstvom odre -dene sile pokrenuti i nadalje kretati, svedok ga neki drugi uzrok - sila - ne zaustavi. Dakle, sila je velicina kojapredstavlja meru mehanickog me -dudejstva materijalnih tela. Me -dutim,ovakva definicija sile nije potpuna. Naime, iz ove definicije se ne vidipriroda sile (vektor, skalar). Zbog toga cemo je definisati preko Njut-novih aksioma (principa) mehanike, koji je u potpunosti odre -duju i poprirodi, i po velicini i, ukazuju na njen izvor.
Pojam sile, preko osnovnih velicina (duzina, vreme, masa), defin-isao je Njutn (”Axiommata sive leges motus”) u obliku cetiri aksioma

Dragan-Goca-Nenad
10 2 Osnovni pojmovi i definicije
(principa)1:
1◦ Svako telo2 ostaje u stanju mirovanja ili jednolikog pravolinijskogkretanja, sve dok ne bude primorano da to svoje stanje promeni.Ovaj Njutnov aksiom ukazuje na egzistenciju sile.
2◦ Proizvod mase tela i njenog ubrzanja 3 jednak je sili koja delujena tu materijalnu tacku. Ovaj aksiom ukazuje na velicinu sile.
3◦ Dva tela deluju jedno na drugo silama koje imaju isti intenziteti pravac, a suprotan smer.
Iz ovog aksioma sledi da izvor sile treba traziti u materijalnimtelima.
4◦ Pri istovremenom dejstvu dve sile na materijalnu tacku, tacka sekrece po dijagonali paralelograma, konstruisanog nad tim silamakao stranama, za isto vreme za koje bi se kretala po pojedinimnjegovim stranama pri dejstvu svake sile posebno.
Napomena. Ovaj princip poznat je kao princip nezavisnosti dej-stva sila. Njutn ga je formulisao kao dopunu drugom aksiomu.On odre -duje prirodu sile, ukazujuci da se ta dejstva sabiraju ge-ometrijski, tj. da je sila vektorska velicina.
2.1.1 Vrste sila
Sile mozemo da podelimo na vise nacina. Jedna od podela je na:
- povrsinske i
- zapreminske.
Povrsinske sile su one koje se prenose preko dodirnih povrsi telakoja su u kontaktu.
Zapreminske sile su one koje deluju na svaki element zapremine.Primer za zapreminske sile je gravitaciona sila.
Sile mogu da se podele i na:
1U literaturi se za ove Njutnove aksiome cesto koristi i pojam ZAKONI.2Pod telom u ovim aksiomama podrazumevamo materijalnu tacku.3Ubrzanje je velicina koja se definise u kinematici. Ubrzanje je drugi izvod
vektora polozaja ili prvi izvod brzine po vremenu.

Dragan-Goca-Nenad
2.1 Sila. Njutnovi principi 11
- spoljasnje i
- unutrasnje.
Spoljasnje sile su one sile kojima druga tela deluju na posmatranotelo.
Unutrasnje sile su sile uzajamnog dejstva izme -du cestica istogtela.
Sile koje izazivaju kretanje zovu se aktivne sile. Sile koje se pro-tive kretanju ili deluju tako da sprecavaju kretanje, nazivaju se sileotpora ili pasivne sile ili sile reakcije (npr. otpor veze, otpor trenja,otpor vazduha, itd.).
Napomena. Aktivna sila moze da izazove kretanje, dok sila otpora nemoze. Ona to kretanje sprecava.
Kao sto je napred receno, na osnovu Njutnovih aksioma, sila jevektorska velicina. Kao svaki vektor i sila moze da se predstavi: grafickii/ili analiticki.
Graficki silu prikazujemo orijentisanom duzi (vidi 2.1),
A
Bnapadna linija
smer
intenzitet
napadna ta~ka
S
Slika 2.1: Graficki prikaza sile
recimo−→AB. Ovako prikazano je:
- A napadna tacka,
- pravac je pravac koji prolazi kroz tacke A i B,
- smer je od A ka B,
- intenzitet je duzina AB.

Dragan-Goca-Nenad
12 2 Osnovni pojmovi i definicije
Kako duzina AB prikazuje intenzitet sile, to se ona predstavlja u odgo-varajucoj razmeri
US =|S|AB
[jedinica za silu
jedinica za duzinu
]Za analiticko predstavljanje vektora (sile) uvodi se koordinatni sis-
tem. Najcesce se koristi desni Dekartov pravougli koordinatni sistem(sl. 2.2)
O
z
x
y
SZ
X
YA
B
Slika 2.2: Prikazivanje sile u Dekartovom koordinatnom sistemu
U ovom slucaju silu prikazujemo preko njenih komponenti:
S = Xi+ Y j+ Zk,
gde su i, j i k ortovi x, y i z ose, respektivno.Pravac i smer ovog vektora odre -den je uglovima α, β i γ, a intenzitet
je duzina AB. Tacka A je napadna tacka sile.Na kraju recimo da je jedinica sile, u me -dunarodnom sistemu je-
dinica (SI - Sisteme International d’Unites) Njutn, a oznacava se sa[N ].
2.1.2 Sistem sila. Rezultanta
Sistem sila je skup svih sila koje deluju na posmatrano telo. Nekana telo deluju sile S1, S2, . . . , Si, . . . , Sn, sa napadnim tackama A1,A2, . . . , Ai, . . . , An. Tada se sistem sila simbolicki predstavlja u obliku(S1, . . . ,Sn), ili krace sa (Si), i = 1, 2, . . . , n.
Sistem sila moze da bude:

Dragan-Goca-Nenad
2.1 Sila. Njutnovi principi 13
- ravanski (napadne linije svih sila leze u jednoj ravni) ili
- prostorni (napadne linije sila su raspore -dene u prostoru 4).
Pored ove podele, sistem sila moze da bude i:
- suceljni (napadne linije svih sila seku se u jednoj tacki),
- paralelni (napadne linije sila su me -dusobno paralelne) i
- proizvoljni (napadne linije sila zauzimaju proizvoljan polozaj uprostoru ili ravni).
Napomena. Ako se napadne linije svih sila sistema poklapaju, tadatakav sistem sila nazivamo sistem kolinearnih sila.
Dva sistema sila (Si), i = 1, 2, . . . , n i (Sj), j = 1, 2, . . . ,m, suekvivalentna, ako pri zameni jednog sistema drugim ne dolazi dopromene stanja kretanja (mirovanja) tela. Specijalno, ako je jednasila ekvivalentna datom sistemu sila, tada se ona naziva rezultanta iobelezava se sa R.
2.1.3 Veze, vrste veza i njihove reakcije
Telo ciji je prostor mogucih polozaja ogranicen naziva se vezano telo,inace je telo slobodno. Tela koja sprecavaju pomeranje posmatranogtela nazivaju se veze. Ako veze dopustaju telu neko pomeranje, tadakazemo da je posmatrano telo delimicno vezano.
Sila kojom veza deluje na dato telo i sprecava njegovo pomeranjenaziva se reakcija veze.
Na osnovu prethodnog, sile delimo na:
- aktivne sile (sile koje izazivaju kretanje ili uravnotezavanje tela)i
4Pod prostorom podrazumevamo trodimenzionalni Euklidski prostor. Pojavekoje izucava klasicna mehanika desavaju se u ” Svetu doga -daja” W , koji cini trodi-menzionalni Euklidski prostor E3 u kome se odre -duje mesto, i jednodimenzionalniEuklidski prostor E u kome se odre -duje vreme doga -danja, tako da je (simbolickinapisano) W = E3 × E.

Dragan-Goca-Nenad
14 2 Osnovni pojmovi i definicije
- sile reakcija veza ili krace reakcije. Ove sile se nekad nazivajui pasivne sile (sile koje, za razliku od aktivnih, ne mogu da izvrsepomeranje tela).
Da bi se odredili uslovi ravnoteze nekog sistema, potrebno je uzetiu obzir sve spoljasnje sile, aktivne i reakcije. Otuda je veoma vaznoda se, zavisno od vrste veza, pravilno odredi pravac reakcija veza togsistema.
Kada razmatramo sistem tela, veze delimo na:
- spoljasnje (veze kojima je posmatrani sistem povezan sa okoli-nom) i
- unutrasnje (veze izme -du tela posmatranog sistema).
Za vezu kazemo da je idealna ako je njena reakcija upravna napravac beskonacno malog vezom dopustenog pomeranja tacke tela ukojoj deluje reakcija veze, ili veza je idealna ako se, iz bilo kojihrazloga, trenje moze zanemariti. Idealne veze u prirodi ne postoje,ali je veliki broj problema u kojima se sile trenja mogu zanemariti upore -denju sa drugim silama. Ipak, postoje i takvi problemi u kojimase trenje, makako malo, mora uzeti u obzir.
2.1.4 Princip osloba -danja od veza
Proucavanje ravnoteze vezanog tela omogucava nam
Princip 1 (osloba -danja od veza) svako vezano (neslobodno) telo mozese smatrati slobodnim ako se veze uklone, a njihov uticaj zameni silamaveze (reakcijama)(sl. 2.3).
SA
SB
SC
a) b)
GA
C
B
A
C
B
Slika 2.3: Princip osloba -danja od veza.

Dragan-Goca-Nenad
2.1 Sila. Njutnovi principi 15
Vrlo je vazno, pri resavanju zadataka u statici, unapred znati pravacsila reakcije, ako je moguce. Primer na slici 2.3b ilustruje pravce reak-cija u tackama dodira A, B i C tela AC sa okolinom.
Postoji bezbroj nacina da se telo (sistem) veze za druga tela: naprimer pomocu uzeta, lanca, stapa, zgloba, raznih oslonaca itd. Otudaima i mnogo nacina na koje deluju reakcije tih veza i nemoguce ih je sveobuhvatiti. Zato ce ovde biti reci samo o nekim najkarakteristicnijim inajcesce koriscenim vezama.
2.1.5 Primeri idealnih veza
Glatka povrs i ostar oslonac. Posmatrajmo kontakt dva idealnoglatka tela (sl. 2.4). Napadna tacka sile veze je na mestu kontakta(tacka A), a njen pravac je pravac normale na zajednicku tangentnuravan T .
Dakle, kako glatka povrs (nema trenja!) sprecava kretanje samou pravcu zajednicke normale u tacki dodira tela, to sila reakcije imapravac zajednicke normale, a tacka dodira je napadna tacka sile reakcije(sl. 2.4).
S’A
T
I
II
A
T
.
II
A
.
T
SA
I
A
a) b)
Slika 2.4: Glatka povrs.

Dragan-Goca-Nenad
16 2 Osnovni pojmovi i definicije
SA
SC
SB
G
IA
B
C
G IA
B
C
.
.
.
a) b)
Slika 2.5: Glatke povrsi.
Razmotrimo kontakt tela u tacki (sl. 2.5a). U datom primeru tackeA, B i C su tada napadne tacke sila reakcije, a napadne linije imajupravac normale na tangentnu ravan u dodirnoj tacki tela (sl. 2.5b).
Posmatrajmo kontakt tela u tacki B na sl. 2.3a. Tacka B je tadanapadna tacka sile reakcije, a napadna linija reakcije ima pravac nor-male na tangentnu ravan, koja se ovde poklapa sa normalom tela, utacki dodira sa osloncem.
Na sl. 2.5 je prikazan postupak odre -divanja reakcije veze kada telou jednoj tacki dodiruje oslonac (tacke A, B i C tela).
Pokretni oslonac. Pri kretanju tela u ravni, veza tela sa podlogomkoja omogucava kretanje u jednom pravcu, a sprecava u drugom, zovese pokretni oslonac (sl. 2.6).
A AA
a) b) c)
Slika 2.6: Vrste pokretnih oslonaca.
U ovom slucaju pravac reakcije se poklapa sa pravcem u kome jespreceno pomeranje (videti sl. 2.7).

Dragan-Goca-Nenad
2.1 Sila. Njutnovi principi 17
..
..
Slika 2.7: Prikaz reakcija pokretnih oslonaca.
Na sl. 2.7 prikazane su najcesce koriscene simbolicke oznake zapokretni oslonac i odgovarajuce reakcije.
Nepokretni oslonac. Za razliku od pokretnog, nepokretni oslonacje cvrsto vezan za podlogu (sl. 2.8). U ovom slucaju veza sprecavapomeranje tacke A (spoj dva tela), ali dozvoljava okretanje (rotaciju)oko zajednicke tacke A, pa je reakcija neodre -denog pravca i intenziteta.Kako se sila u ravni predstavlja sa dve komponente, to su u ovomslucaju nepoznate te komponente.
A
A
XA
YA
a) b)
Slika 2.8: Nepokretni oslonac.
Ako se reakcija oslonca A prikaze preko svojih komponenti, kao nasl. 2.8b, intenzitet reakcije RA, kao i njen pravac i smer odre -deni susa:
RA =√X2
A + Y 2A , tgα =
YA
XA
, (2.1)
gde jeXA = RA cosα, YA = RA sinα. (2.2)
Zglob je veza izme -du tela koja sprecava razdvajanje tela, a dozvol-java relativno okretanje jednog tela u odnosu na drugo. Ponasa seslicno nepokretnom osloncu. Reakcija u zglobu C (sl. 2.9a) je sila kojaje unapred nepoznata po pravcu i intenzitetu, sto se u ravni svodi na

Dragan-Goca-Nenad
18 2 Osnovni pojmovi i definicije
dve nepoznate komponente (nepokretan oslonac), a u prostoru na trinepoznate komponente (sferni oslonac). Dakle, zglobna veza moze dabude sa 3, 2 i 1 stepenom pokretljivosti (slike 2.9).
Slika 2.9: Prikaz reakcije u zglobu.
Ukljestenje. Ukljestenje sprecava kako pomeranje u dva pravca,tako i obrtanje noseceg elementa (tela) oko tacke vezivanja.
A B B
A
A
YA
F F
XA
a) b)
Slika 2.10: Prikaz reakcije u ukljestenju.
Uze. Veza ostvarena pomocu savitljivog i nerastegljivog uzeta nedozvoljava telu koje deluju na njega da se udalji od tacke vesanja.Zbog toga sila reakcije ima za napadnu tacku tacku vesanja tela, a na-padna linija se poklapa sa pravcem uzeta, dok je smer od tacke vesanjatela ka tacki vezivanja uzeta.
SA
SB
G
A B
C
Slika 2.11: Sile u uzetu.

Dragan-Goca-Nenad
2.1 Sila. Njutnovi principi 19
Idealno savitljivo uze moze da bude napregnuto samo na zatezanje,a sila koja ga napreze ima pravac uzeta. U suprotnom, ono bi sedeformisalo i ne bi odgovaralo nameni (ne bi predstavljalo vezu). Dakle,uze moze da prenosi samo sile zatezanja.
Laki stap. Stap je nosac koji ima jednu dimenziju znatno vecu oddruge dve, dobro podnosi istezanje kao i pritisak. Za razliku od stapa,greda je tako -de noseci element koji ima jednu dimenziju znatno vecuod druge dve, ali moze da bude opterecena i transverzalnim silama kaoi momentima (sl. 2.12).
SB
SC
B
C
D
A
Slika 2.12: Telo BC vezano stapovima za nepokretnu sredinu.
Na sl. 2.12 stap DC je opterecen na istezanje, a stap AB na priti-sak.
A AS
A
Slika 2.13: Reakcija SA vo -dice na klizac.
Klizac. Ako je na mestu vezivanja dva tela postavljen klizac (sl.2.13), i ako se zanemari trenje izme -du vo -dice i klizaca, reakcija veze(vo -dice) je upravna na pravac duz koga se pomera klizac (sl. 2.13c).

Dragan-Goca-Nenad
20 2 Osnovni pojmovi i definicije
Cilindricno leziste. Prostorna veza izme -du dva tela, koja dozvol-java da se telo slobodno okrece oko jedne ose, zove se cilindricnoleziste (vidi sl. 2.14).
a)
A
b)
A
A
c)
XA
YA
zz
Slika 2.14: Prikaz reakcije veze cilindricnog lezista.
Ovakva veza dozvoljava posmatranom telu (sl. 2.14a) da se obrceoko ose, ali mu ne dozvoljava pomeranje u ravni upravnoj na osu (sl.2.14b). Dakle, reakcija RA nepokretnog oslonca A moze imati bilo kojipravac u ravni koja je upravna na osu obrtanja. Posto reakcija lezi uravni, to su nepoznate njene dve komponente (sl. 2.14c).
Sferni oslonac. Cesto se u literaturi koristi pojam sferni oslonac.To je, u stvari, sferna glatka veza koju smo opisali kao zglob (videtizglobnu vezu na str.18).
y
x
z
A
y
x
z
A
y
x
z
Aa
b
g
XA
YA
ZA
a) b) c)
RA
Slika 2.15: Sferni oslonac.
Primer glatke zglobne veze dat je na sl. 2.15. Reakcija RA zglobneveze moze da ima bilo kakav pravac u prostoru. Odatle sledi da jeza odre -divanje reakcije potrebno odrediti intenzitet, pravac i smer sileRA, ili tri projekcije XA, YA i ZA, tj.
RA = XAi+ YAj+ ZAk = RA cosαi+RA cos βj+RA cos γk.

Dragan-Goca-Nenad
2.2 Moment sile za tacku 21
2.2 Moment sile za tacku
Iz iskustva je poznato da ako na slobodno telo deluje jedna sila S, teloce se pomerati duz napadne linije sile. Dakle, telo nije u ravnotezi.Ako to telo vezemo u nekoj tacki O, koja se nalazi na napadnoj linijisile, telo ce biti u ravnotezi, jer se sila S i reakcija veze u tacki Ouravnotezavaju. Me -dutim, ako telo vezemo za tacku koja ne lezi nanapadnoj liniji sile, ono ce se obrtati oko tacke O (sl. 2.16). Prematome, dejstvo sile na kruto telo moze imati i obrtni efekat. Obrtniefekat sile izrazava se velicinom koju nazivamo moment.
Definicija 2.1. Moment sile S za tacku O je vektor MSO definisan
vektorskim proizvodom
MSO = r× S, (2.3)
gde je: r - vektor polozaja napadne tacke A sile S (r =−→OA), O -
momentna tacka.
Or
A
S
S
MO
Slika 2.16: Moment sile za tacku.
Ravan koju obrazuju vektori r i S 5 naziva se ravan obrtanja.Iz definicije vektorskog proizvoda sledi da je moment sile za tacku
vektor upravan na ravan koju cine vektori r i S, tj. upravan na ravanobrtanja. Dakle, pravac momenta je pravac normale na ravan obrtanja.
Intenzitet vektora momenta sile za tacku se odre -duje sa
M ≡ |MSO| = |S|· |r|· | sinα| (2.4)
5Dve prave, koje se seku ili su paralelne, odre -duju ravan.

Dragan-Goca-Nenad
22 2 Osnovni pojmovi i definicije
gde je α - ugao izme -du pravaca vektora r i S.
O r
A
a
S
SM
O
h
Slika 2.17: Moment sile za tacku.
Rastojanje izme -du momentne tacke O i napadne linije sile nazivase krak sile (na slici 2.17 oznacen sa h). Dakle, intenzitet momentasile za tacku jednak je proizvodu intenziteta sile i kraka sile, tj.
M = S·h. (2.5)
Na kraju napomenimo da se smer ovog vektora odre -duje pravilomdesne ruke (zavrtnja). Smer momenta je pozitivan ako se sa vrha vek-tora zamisljeno obrtanje tela, pod dejstvom sile S, vidi u matematickipozitivnom smeru (smeru suprotnom od smera obrtanja kazaljke nacasovniku), sto se cesto oznacava kruzicem i tackom u centru (vidi2.18a).6
O
A
S
SM
O
h
O A
S
SM
O
h
Slika 2.18: Moment za tacku - smer.
Dimenzija momenta sile za tacku je [M ] = SL = ML2T−2, gde jeS - sila, L - duzina, M - masa, T - vreme.
6Zapazimo da je smer momenta sile za tacku izabran u skladu sa orijentacijomkoordinatnog sistema (” desni”). Promenom orijentacije sistema menja se i smervektorskog proizvoda. Vektori koji imaju tu osobinu zovu se ”aksijalni vektori”.

Dragan-Goca-Nenad
2.2 Moment sile za tacku 23
Jedinica mere za merenje intenziteta momenta sile za tacku, u SIsistemu, je [Nm] (Njutnmetar).
2.2.1 Svojstva momenta sile za tacku
Navedimo neka svojstva momenta sile za tacku.
♢ Moment sile za tacku zavisi od izbora momentne tacke (vektorvezan za tacku).
♢ Moment sile za tacku ne menja se pri promeni napadne tacke sileduz njene napadne linije (krak sile se ne menja; smer, pravac iintenzitet sile ostaje isti).
♢ Moment sile za tacku jednak je nuli kada momentna tacka lezina napadnoj liniji sile (krak je jednak nuli).
♢ Promenom smera sile S menja se i smer momenta sile, tj. ako jeS1 = −S2 (|S1| = |S2|), tada je
MO(S1) = −MO(S2). (2.6)
2.2.2 Analiticko odre -divanje momenta sile za tacku
Postavimo u momentnu tacku koordinatni pocetakO, Dekartovog pravou-glog koordinatnog sistema (sl. 2.19).
O
x
y
z
r
S
MO
S
A( )x,y,z
Slika 2.19: Moment sile za tacku - analiticki.

Dragan-Goca-Nenad
24 2 Osnovni pojmovi i definicije
Neka sila S deluje u tacki tela A. Vektor polozaja tacke A i silu Smozemo da prikazemo preko koordinata izrazima:
r = xi+ yj+ zk, (2.7)
S = Xi+ Y j+ Zk, (2.8)
gde su x, y, z - koordinate tacke A, odnosno projekcije vektora r nakoordinatne ose, a X,Y, Z - projekcije sile na odgovarajuce ose.
Poznato je, iz vektorske algebre, da se vektorski proizvod mozeprikazati simbolicnom determinantom,7 tj.
MSO = r× S =
∣∣∣∣∣∣i j kx y zX Y Z
∣∣∣∣∣∣ , (2.9)
odakle, posle razvijanja detrminante, dobijamo
MSO = i(yZ − zY ) + j(zX − xZ) + k(xY − yX). (2.10)
Me -dutim, kako se MSO, kao svaki vektor, moze prikazati i u obliku
MSO = MOxi+MOyj+MOzk, (2.11)
gde su MOx, MOy i MOz projekcije momenta sile na odgovarajuce ose,to upore -dujuci (2.11) sa (2.10), dobija se:
MOx = yZ − zY,
MOy = zX − xZ,
MOz = xY − yX.
(2.12)
Intenzitet momenta sile za tacku je sada
MSO =
√M2
Ox +M2Oy +M2
Oz, (2.13)
a pravac i smer su odre -deni kosinusima uglova
cosα =MOx
MSO
, cos β =MOy
MSO
, cos γ =MOz
MSO
, (2.14)
7Determinanta je skalarna vrednost, a ovde razvijanjem dobijamo vektor, pazbog toga kazemo ”simbolicka”.

Dragan-Goca-Nenad
2.3 Moment sile za osu 25
gde su α, β i γ uglovi koje vektor momenta sile zaklapa sa osama Ox,Oy i Oz, respektivno.
Dakle, moment sile za tacku je u potpunosti odre -den ako znamokoordinate napadne tacke sile (ili bilo koje tacke na napadnoj linijisile, jer smo pokazali da se moment sile ne menja ako se napadna tackapomeri duz napadne linije, videti osobinu na str. 23) i ako su poznateprojekcije sile na ose izabranog koordinatnog sistema.
2.3 Moment sile za osu
Pored obrtanja tela oko tacke, sila moze da izazove i obrtanje tela okoose. 8 Mera obrtnog dejstva sile oko ose naziva se moment sile zaosu.
Definicija 2.2. Moment sile S za osu ℓ je projekcija momenta sile zatacku O na osu ℓ, tj.
Mℓ = MSO· ℓO, (2.15)
gde je ℓO ort ose ℓ, O ∈ ℓ.
A
O
z
x
y
MO
S
r
M
O
S
Slika 2.20: Moment sile za osu.
8Pri ravanskom kretanju, telo koje se okrece oko tacke, ustvari, okrece se okoose u trodimenzionom prostoru.

Dragan-Goca-Nenad
26 2 Osnovni pojmovi i definicije
Koristeci definiciju momenta sile za tacku (2.3), moment sile za osumoze da se predstavi i u obliku
Mℓ = (r× S)· ℓO. (2.16)
Ovaj mesoviti vektorski proizvod mozemo da prikazemo i u analitickomobliku. Naime, ako je
ℓO = cosα i+ cos β j+ cos γ k, (2.17)
gde su α, β i γ uglovi koje obrazuje ort ℓO sa Ox, Oy i Oz osama,respektivno, tada je
Mℓ = (r× S)· ℓO =
∣∣∣∣∣∣x y zX Y Z
cosα cos β cos γ
∣∣∣∣∣∣ . (2.18)
U specijalnom slucaju, kada se osa ℓ poklapa sa jednom od osa, recimoOx - osom (α = 0, β = γ = π/2), dobijamo
Mx =
∣∣∣∣∣∣x y zX Y Z1 0 0
∣∣∣∣∣∣ = yZ − zY. (2.19)
Isti rezultat bismo dobili i ako iskoristimo (2.10) i (2.15), tj.
Mx = MSO· i = (MOxi+MOyj+MOzk)· i = MOx = yZ − zY. (2.20)
2.3.1 Svojstva momenta sile za osu
Navedimo neka svojstva momenta sile za osu.
♢ Moment sile za osu ne zavisi od polozaja momentne tacke na osi,za koju racunamo moment sile za tacku.
Dokaz.

Dragan-Goca-Nenad
2.3 Moment sile za osu 27
AO
B
z
x
y
S
r1
rO
Slika 2.21: Svojstvo-1.
Neka su tacke O i B, koje pripadaju osi ℓ, momentne tacke.Moment sile S za tacku O je
MSO = r× S, (2.21)
a za tacku B
MSB = r1 × S. (2.22)
Kako je BOℓO + r = r1, to je
MSB = r1 × S = (r+BOℓO)× S = r× S+BO(ℓO × S).
(2.23)Moment sile S za osu ℓ, po definiciji, je
MSB· ℓO = (r× S)· ℓO +BO(ℓO × S)· ℓO = MO· ℓO. (2.24)
U poslednjoj relaciji iskoristili smo osobinu mesovitiog proizvoda(ℓO × S)· ℓO = 0.
♢ Moment sile S za osu ℓ jednak je nuli ako je osa ℓ paralelna sanapadnom linijom sile S.
Dokaz.

Dragan-Goca-Nenad
28 2 Osnovni pojmovi i definicije
O
x
y
z
rS
A
O
Slika 2.22: Svojstvo-2.
Prema pretpostavci je S = SℓO, pa za moment sile za osu dobi-jamo
Mℓ = MSO· ℓO = (r× S)· ℓO = (r× SℓO)· ℓO = 0. (2.25)
I ovde smo iskoristili osobinu mesovitiog proizvoda.
♢ Moment sile S za osu ℓ, koju napadna linija sile S sece, jednakje nuli.
Dokaz.
O
x
y
rS
A
z
rB
B
Slika 2.23: Svojstvo-3.
U ovom slucaju je (vidi sliku 2.23)
r = rB + ABS
|S|= OBℓO + aS, (2.26)

Dragan-Goca-Nenad
2.4 Spreg sila 29
gde je a = AB/|S|.Kako je
MSO = r× S = (OBℓO + aS)× S = rB × S = MS
B, (2.27)
to je
Mℓ = MSO· ℓO = MS
B· ℓO = (rB × S)· ℓO = (OBℓO × S)· ℓO = 0.(2.28)
2.4 Spreg sila
Posmatrajmo dve paralelne sile istih intenziteta, a suprotnih smerova.Ovaj sistem sila nije u ravnotezi, jer sile nemaju zajednicku napadnuliniju. Intuitivno je jasno da je jedino kretanje koje ove sile mogu davrse cisto obrtanje (rotacija) oko ose koja je upravna na ravan u kojojleze ove sile.
Definicija 2.3. Spreg sila predstavlja sistem od dve paralelne sileistih intenziteta, a suprotnih smerova.
Ravan koju odre -duju sile sprega naziva se ravan dejstva sprega.Rastojanje izme -du sila sprega naziva se krak sprega. Sile koje cinespreg nazivaju se sile sprega. Oznaka za spreg je (S,S′).
Efekat obrtanja karakterise se momentom sprega.
A
r
BS
S’
a
a
ravandejstvasprega
Slika 2.24: Spreg sila.
Moment sprega zavisi od:

Dragan-Goca-Nenad
30 2 Osnovni pojmovi i definicije
- intenziteta sile sprega i kraka sprega,
- polozaja ravni dejstva sprega i
- smera obrtanja u ravni dejstva sprega.
Odavde zakljucujemo da je moment sprega vektorska velicina.
Definicija 2.4. Moment sprega sila je vektor odre -den vektorskimproizvodom
M = r× S, (2.29)
gde je r - vektor polozaja napadne tacke sile sprega, a S - sila sprega.
Iz definicije sledi (sl. 2.24) da je:
- intenzitet momenta sprega odre -den sa
M = |r|· |S|· sinα = a·S, (2.30)
- pravac momenta sprega je pravac normale na ravan dejstva sprega.
Vektor momenta sprega usmeren je na onu stranu prostora odakle seobrtno dejstvo sprega vidi kao matematicki pozitivno (sl. 2.25). Ovajvektor je slobodan vektor i moze da se slobodno premesta u prostoru.
A
r
BS
S’ A
r
B S
S’
a) b)
Slika 2.25: Spreg sila - znak.

Dragan-Goca-Nenad
2.5 Redukcija sile na tacku. Torzer 31
2.5 Redukcija sile na tacku. Torzer
2.5.1 Redukcija sile na tacku
Kako je sila klizeci vektor, ona se ne moze proizvoljno premestati sajedne napadne linije na neku drugu, bez posledice na njeno dejstvona telo. Postupak premestanja sile iz jedne tacke u neku drugu iz-van napadne linije, a da se dejstvo sile na telo ne promeni, naziva seredukcija sile na tacku. Objasnimo ga.
r
B B B
r
A A A
S S
S S
S S S
-S
MA
MA
MA
= =
a) b) c)
Slika 2.26: Redukcija sile na tacku.
Neka data sila S deluje na kruto telo u tacki B i neka je A tackatela, tzv. redukciona tacka, u koju treba preneti datu silu (sl. 2.26a).Oznacimo vektor polozaja tacke B u odnosu na redukcionu tacku Asa r. Dodajmo u tacki A ravnotezni par sila, ciji su intenziteti jednakiintenzitetu sile S, sa napadnom linijom paralelnom napadnoj liniji datesile (sl. 2.26b). Ocigledno je da se dodavanjem ravnoteznog para silanije nista promenilo sto se tice daljeg kretanja tela.
Sila S u napadnoj tacki B i sila −S u redukcionoj tacki A obrazujuspreg sila. Vektor momenta sprega je
M = r× S. (2.31)
Kako je on slobodan vektor, mozemo ga premestiti u redukcionu tackuA (sl. 2.26c). Dakle, osim sile S u tacki A deluje i moment spregaM. Na taj nacin smo silu S iz napadne tacke B preneli u napadnutacku A. Iz izlozenog sledi: silu mozemo preneti iz neke tacke B uproizvoljnu tacku A dodajuci spreg ciji je moment jednak momentusile koju prenosimo, u odnosu na tacku u koju se sila prenosi.

Dragan-Goca-Nenad
32 2 Osnovni pojmovi i definicije
Potrazimo sada moment sile S u odnosu na neku redukcionu tackuC i odredimo vezu izme -du momenata za tacku A i novu redukcionutacku C (sl. 2.27).
B
r
r
r1
AC
S
Slika 2.27: Promena tacke redukcije.
Oznacimo sa r1 vektor polozaja tacke B u odnosu na novu reduk-cionu tacku C, a sa ϱ vektor polozaja tacke C u odnosu na tacku A(vidi sl. 2.27). Onda je
r1 = r− ϱ. (2.32)
Kako je moment sile S u odnosu na redukcionu tacku A
MSA = r× S, (2.33)
onda, na osnovu (2.32), moment sile S u odnosu na novu tacku reduk-cije C, je
MSC = r1 × S = (r− ϱ)× S = MS
A − ϱ× S, (2.34)
ili
MSC = MS
A +−→CA× S. (2.35)
Ako je−→CA ∥ S, tada je, na osnovu (2.35), MS
C = MSA, sto znaci da
prave paralelne sa napadnom linijom sile S predstavljaju geometrijskomesto tacaka u kojima je redukcioni moment konstantan.
2.5.2 Glavni vektor, glavni moment. Torzer
Neka je dat proizvoljan sistem sila Si[Xi, Yi, Zi] u prostoru sa na-padnim tackama Pi(xi, yi, zi) (i = 1, 2, . . . , n) (sl.2.28a).

Dragan-Goca-Nenad
2.5 Redukcija sile na tacku. Torzer 33
O O
z
x
y
z
x
y
S1
SS
RR
S2
S4
S3
Si
Sn
P1
P3
P4
Pi
P2
Pn
r1
r2
r3
r4
ri
rn
MO
a) b)
Slika 2.28: Prostorni sistem sila.
Vektori polozaja ri napadnih tacaka Pi sila Si su
ri = xi i+ yi j+ zi k. (2.36)
Redukujmo ovaj sistem sila na tacku O. Neka je ta tacka ujedno i ko-ordinatni pocetak Dekartovog koordinatnog sistema. Redukcijom svihsila na tacku O, dobicemo pramen suceljnih sila i pramen momenata(spregova). Ako ovaj sistem sila saberemo (sl. 2.28b), dobijamo
SR =n∑
i=1
Si = in∑
i=1
Xi + jn∑
i=1
Yi + kn∑
i=1
Zi = XRi+ YRj+ ZRk.
(2.37)Ovaj zbir SR naziva se glavni vektor datog sistema sila. 9
Pored toga, kao posledicu redukcije dobicemo i n redukcionih mo-menata. Njihov zbir daje tzv. glavni moment sistema sila za reduk-
9Napomenimo da ovaj vektor ne predstavlja rezultantu (vidi definiciju !!!), jerpored njega postoje i momenti spregova, dobijeni redukcijom, pa dati sistem nijeekvivalentan samo jednoj sili.

Dragan-Goca-Nenad
34 2 Osnovni pojmovi i definicije
cionu tacku O (sl. 2.28b), koji mozemo da prikazemo u obliku
MSRO =
n∑i=1
ri × Si =
= in∑
i=1
(yiZi − ziYi) + jn∑
i=1
(ziXi − xiZi) + kn∑
i=1
(xiYi − yiXi) =
= Mxi+Myj+Mzk.(2.38)
Glavni vektor SR i glavni moment MSRO , prostornog sistema sila, su
vektori razlicite vrste (razlicite prirode) i ne mogu se vektorski sabratiu treci vektor. Ovaj par vektora nazivamo torzer. On predstavljastaticki ekvivalent datom sistemu sila. Posto smo redukcionu tackubirali proizvoljno, to znaci da se proizvoljan prostorni sistem sila mozena proizvoljno mnogo nacina zameniti ekvivalentnim torzerima. Glavnivektor kao geometrijski zbir svih sila sistema ne zavisi od izbora re-dukcione tacke, ali, kao sto je ranije pokazano, glavni moment zavisi.Dakle, svaka promena redukcione tacke izaziva promenu redukcionogmomenta svake sile, a to znaci i glavnog momenta.
2.6 Osnovni staticki elementi
Do sada smo proucili tri razlicita staticka elementa: silu, moment sileza datu tacku i spreg sila. Sva tri elementa su vektori, ali razlicitih os-obina. Sila je klizeci vektor koji izaziva translatorno kretanje. Momentsile za tacku je vezani vektor za odre -denu tacku i izaziva obrtanje okotacke. Spreg je slobodan vektor, njegovo dejstvo je obrtanje oko ose.
Slika 2.29: Osnovni staticki elementi: sila, moment sile i spreg
I moment i spreg izazivaju obrtanje tela, a ipak izme -du njih postoji

Dragan-Goca-Nenad
2.7 Uslovi ravnoteze 35
razlika. Neka na primer, data krivaja (rucica), koja se moze obrtatioko horizontalne osovine (sl. 2.30) na cijem slobodnom kraju dejstvujesila S.
Slika 2.30: Osnovni staticki elementi: sila, moment sile i spreg
Redukujmo tu silu na tacku O (prodor osovine kroz ravan kojaprolazi kroz silu S, a upravna je na osovinu), dobicemo istu takvusilu S i spreg, momenta ciji je intenzitet S· r. Spreg izaziva obrtanje,a sila S izaziva pritisak na osovinu obrtanja. Me -dutim, ako na rucicuduzine 2r (sl. 2.30)b dejstvuju dve sile upola manjeg intenziteta (1/2S)one obrazuju spreg istog momenta S· r koji izaziva cisto obrtanje bezikakvog pritiska na osovinu.
Dakle, sila izaziva translaciju, spreg izaziva cisto obrtanje (rotaciju),a moment sile je kombinacija translacije i rotacije. Zbog toga se prikonstrukciji masinskih delova tezi da se dejstvo momenta zameni de-jstvom sprega.
2.7 Uslovi ravnoteze
Da be telo, na koje deluje sistem sila Si (i = 1, . . . , n), bilo u ravnotezipotrebno je da se spreci njegova translacija (zbir svih sila jednak nuli, tj.glavni vektor sile SR =
∑ni=1 Si = 0 ) i obrtanje (zbir svih momenata
jednak nuli, tj. glavni vektor momenta MSRO =
∑ni=1 Mi = 0 ), pa iz
(2.37) i (2.38) slede:
uslovi ravnoteze u vektorskom obliku:
n∑i=1
Si = 0,n∑
i=1
Mi = 0, (2.39)

Dragan-Goca-Nenad
36 2 Osnovni pojmovi i definicije
uslovi ravnoteze u skalarnom obliku:
n∑i=1
Xi = 0,n∑
i=1
Yi = 0,n∑
i=1
Zi = 0,
n∑i=1
Mxi= 0,
n∑i=1
Myi = 0,n∑
i=1
Mzi = 0.
(2.40)
Pri dobijanju uslova u skalarnom obliku vektorske jednacine pro-jektovane su na pravougli Dekartov siste. Jasno, moze se, po potrebi,projektovati i na bilo koji drugi.
Navedimo sada neke specijalne slucajeve.
2.7.1 Ravanski sistem sila
U ovom slucaju sve sile leze u jednoj ravni, recimo da je to ravan xy,pa se sest jednacina iz (2.40) svodi na:
n∑i=1
Xi = 0,n∑
i=1
Yi = 0,n∑
i=1
Mzi = 0. (2.41)
2.7.2 Suceljni sistem sila
U ovom slucaju sve se sile seku u jednoj tacki, pa su momentne jednacineidenticki zadovoljene, tj.
n∑i=1
Xi = 0,n∑
i=1
Yi = 0,n∑
i=1
Zi = 0. (2.42)

Dragan-Goca-Nenad
GLAVA
3
GREDNI NOSACI
3.1 Gredni nosac opterecen u svojoj ravni
3.1.1 Oblici veza i neke vrste grednih nosaca. Reak-cije veza i staticka odredenost nosaca
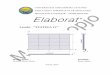
Na slici 3.1 pokazan je ortogonalni koordinatni sistem koji vezujemo zaprav stap. Osa z poklapa se sa osom stapa, a u ravni koordinatnih osa zi y lezi baza stapa za koju je z = 0. Na istoj slici dat je sematski prikazstapa, duz koja predstavlja njegovu osu, zajedno sa usvojenim koor-dinatnim sistemom. Spoljno opterecenje silama i spregovima deluje uravni yz koji nazivamo ravan stapa. Tako opterecen stap ce postatinosac kada se vezama oduzme mogucnost njegovog kretanja u toj ravni.Ako se podsetimo da stap u ravni ima tri stepena slobode kretanja, jersu moguce njegove dve nezavisne translacije duz ortogonalnih pravacay i z i rotacija u ravni yz, vezama je potrebno oduzeti stapu bar tristepena slobode kretaaja. Pri tome se radi o vezama koje delimicno, ili

Dragan-Goca-Nenad
38 3 Gredni nosaci
potpuno, oduzimaju stapu slobodu kretanja u svojoj ravni. Od takvihveza ovde navodimo tri standardne veze koje jos nazivamo osloncima.
Oz
z
y
y
yx
x S
Slika 3.1: Slika 1
Primenicemo aksiom o vezanom telu Mehanike krutog tela premakome uklonjene veze zamenjujemo silama veze koje zovemo i reakcijeveze.
Pokretni zglob sematski je prikazan na slici 3.2a zajedno sa delomose stapa. Veza je takve prirode da dopusta obrtanje stapa oko tackeA u ravni yz i pomeranje ove tacke stapa u pravcu z ose. Oduzimastapu jedan stepen slobode kretanja, a to je pomeranje tacke A stapau pravcu y ose. Ovu uklonjenu vezu zamenjujemo jednom reakcijomveze u pravcu y ose i oznacavamo je sa YA.
z z z
z z z
y y y
y y y
a) b) c)
YA
YA
YA
MA
ZA
ZA
A
A
A A
A
A
Slika 3.2: Slika 2
Nepokretan zglob je sematski prikazan na slici 3.2b zajedno sadelom ose stapa. Ova veza dopusta obrtanje stapa u ravni yz oko tackeA, ali sprecava pomeranje ove tacke stapa u toj ravni duz ortogonal-nih pravaca y i z. Veza oduzima stapu dva stepena slobode kretanja.Nakon uklanjanja zamenjujemo je sa dve nezavisne reakcije veze: YA iZA.
Ukljestenje je sematski prikazano na slici 3.2c tako -de sa delomose stapa. Pored toga sto onemogucava pomeranje tacke A stapa uravni yz ova veza sprecava i obrtanje stapa oko tacke A u toj ravni.Ukljestenje oduzima stapu tri stepena slobode kretanja. Uklonjenuvezu zamenjujemo sa tri nezavisne reakcije veze: silama YA i ZA i

Dragan-Goca-Nenad
3.1 Gredni nosac opterecen u svojoj ravni 39
spregom momenta MA, tzv. momentom uklestenja, cija je ravandejstva yz ravan, tako da se vektor ovog momenta poklapa sa osom x.
z
z
z
z
z
z
y
y
y
y
y
y
a)
b)
c)
.
.
YA
YA
YB
YB
ZA
ZB
A
A
B
B
B
B
A
A
YA
MA
ZA
A
A
Slika 3.3: Slika 3
Kao poseban tip navodimo jos elasticne oslonce koji samo delimicnoogranicavaju mogucnosti kretanja. To su razne vrste opruga i gibnjeva.
Stap ce postati nosac ako su veze takve da stapu oduzmu bar tristepena slobode kretanja. Koristeci pokazane veze mozemo obrazovativise vrsta grednih nosaca. To su: prosta greda (sl. 3.3a), greda saprepustima (sl. 3.3b) i konzola (sl. 3.3c), kao i drugi gredni nosaciod kojih su neki prikazani na slici 3.4.

Dragan-Goca-Nenad
40 3 Gredni nosaci
Slika 3.4: Slika 4
Gredni nosac prima spoljno opterecenje u svojoj ravni yz. Kao stosmo videli i reakcije veza leze u istoj ravni. Sistem spoljnog opterecenjai reakcija veza, prema tome, predstavlja ravnotezni sistem spregova isila u ravni, pri cemu sile nemaju zajednicku napadnu tacku. Iz Statikekrutog tela poznato je da takav sistem sila i spregova ispunjava trinezavisna skalarna uslova ravnoteze (sl. 3.3 i 3.4):∑
i
Zi = 0,∑i
Yi = 0,∑i
MAz = 0, (3.1)
ili u alternativnom obliku:∑i
Zi = 0,∑i
MAz = 0,
∑i
MBz = 0. (3.2)
U izrazima (3.1) prva dva uslova znace da su algebarski zbiroviprojekcije svih sila na pravac ose z, odnosno y, jednaki nuli. Treciusiov kazuje da je algebarski zbir momenata svih sila i spregova okoose x, u odnosu na proizvoljnu tacku A ravni yz, jednak nuli. Naosnovu ovoga, znacenja alternativnih uslova ravnoteze (3.2) su jasnasa napomenom da pravac na kome leze tacke A i B nije upravan naosu z. Uobicajeno je da se tacke A i B biraju na osi nosaca tako da jeovaj uslov ispunjen (sl. 3.3 i 3.4).
Prostoj gredi, gredi s prepustima i konzoli (sl. 3.3) veze oduzimajupo tri stepena slobode kretanja. Kada se one uklone na ovim nosacimapojavljuju se po tri nezavisne reakcije veza. Kako nam na raspola-ganjn stoje tri nezavisna skalarna uslova ravnoteze (3.1) ili (3.2) sve

Dragan-Goca-Nenad
3.2 Linijsko raspodeljeno opteretenje 41
nepoznate reakcije veza na ovim nosacima jednoznacno odre -dujemo izuslova ravnoteze, metodama Statike krutog tela. Zato su to statickiodre -deni nosaci. Nakon odre -divanja reakcije veza poznajemo celoku-pan ravnotezni sistem sila i spregova koji deluju na uocene nosace.
Na slici 3.4 prikazana su dva nosaca koji imaju prekobrojne veze.Na prvom nosacu ima pet, a na drugom cetiri nezavisnih reakcija veze.Kako nam stoje na raspolaganju samo tri nezavisna skalarna uslovaravnoteze (3.1) ili (3.2) jasno je da u prvom slucaju nedostaju jos dve,a u drugom slucaju jedna jednacina da bi se mogle odrediti sve nepoz-nate reakcije veza. Nosaci kod kojih se reakcije veza ne mogu odreditimetodama Statike krutog tela su staticki neodre -deni nosaci. Dopunskejednacine koje se dodaju uslovima ravnoteze, da bi se dobio potpun sis-tem jednacina za odre -divanje reakcija veza, zovu se jos i geometrijskiuslovi. Oni se odnose na deformaciju grednog nosaca prouzrokovanuzadatim opterecenjem i kao takvi su deo sadrzaja Otpornosti materi-jala.
3.2 Linijsko raspodeljeno opteretenje
Spoljno opterecenje moze biti kontinualno raspore -deno duz ose nosaca.Ono ima dimenziju sile po jedinici duzine [N/m], a zakon njegovepromene y(z) je, u opstem slucaju, proizvoljna funkcija koordinate z(sl. 3.5). Zadrzacemo se na raspodeljenom opterecivanju gravitacionogtipa sto znaci da u tacki ose sa koordinatom z deluje sila intenzitetaq(z), po jedinici duzine, vertikalnog pravca usmerena nanize u pravcui smeru pozitivne y ose (sl. 3.5).
Prilikom odredivanja reakcija veza linijski raspodeljeno opterecenjese, mehanicki ekvivalentno, zamenjuje rezultantom. Moze se pokazatida je intenzitet rezultante jednak povrsini dijagrama opterecenja, a danjena napadna linua prolazi kroz teziste dijagrama opteretenja. Akosa a oznacimo duzinu na kojoj deluje linijski raspodeljeno opterecenjetada su velicina rezultante Fq i njen polozaj odre -den duzinom a0 (sl.3.6) kod jednoliko raspodeljenog opterecenja:
Fq = q0a, a0 =1
2a,

Dragan-Goca-Nenad
42 3 Gredni nosaci
Navodimo neke jednostavnezakone promene linijski raspodel-jenog opterecenja. Ako jeq(z) ≡ q0 ≡ const. to jejednoliko raspodeljenoopterecenje. Ako je q(z)linearna funkcija koordinate zopterecenje je raspodeljeno potrouglu. Dijagrami ovih linijskihopteredenja prikazani su na slici3.6.
z
q(z)
y
z
Slika 3.5: Slika 5
z
q(z) qo
y
z
Slika 3.6: Slika 6
3.3 Sile u preseku
Posmatramo gredni nosac na koji deluju spoljno opterecenje i reakcijaveza obrazujuci ravnotezni sistem sila i spregova u ravni yz. Za sadase necemo upustati u to da li je gredni nosac staticki odre -den ili neo-dre -den vec pretpostavljamo da su poznate sve reakcije veza, odnosnoda su poznate sve sile i spregovi ovog ravnoteznog sistema. Tako -depretpostavljamo da je njihov raspored na nosacu proizvoljan.
Uocimo na osi nosaca proizvoljnu tacku P (sl. 3.7) i zamislimo da jekroz tu tacku provucena ravan π upravna na osu nosaca. U ovoj ravnilezi odgovarajuci poprecni presek nosaca, a tacka P , kao tacka na osi,poklapa se sa tezistem S tog poprecnog preseka. Uocenom tackom Pravnotezni sistem, koji deluje na gredni nosac, podeljen je na dva dela:deo sistema sila i spregova koji lezi leva od tacke P , tj. levo od uocenogpoprecnog preseka, i deo koji lezi desno od tog poprecnog preseka.

Dragan-Goca-Nenad
3.3 Sile u preseku 43
y
y
y
z
z
z
P
P
P
Slika 3.7: Slika 7
Prvo posmatramo desni deo nosaca. Uticaj dela sistema, koji lezilevo od uocenog poprecnog preseka, dobija se njegovom redukcijomna tacku P . To su: redukciona rezultanta FRL i redukcioni momentintenziteta MRxL.
Posmatrajmo sada levi deo nosaca. Uticaj dela sistema koji lezidesno od uocenog poprecnog preseka dobija se, tako -de, redukcijom ovogdela sistema na tacku P . To su: redukciona rezultanta FRD i redukcionimoment intenziteta MRxD.
Kako je celokupan sistem sila i spregova, koji deluje na nosac, uravnotezi ispunjeni su uslovi ravnoteze Statike krutog tela koji u vek-torskom obliku glase
FR = 0, MPR = 0, (3.3)
odakle neposredno sledi i
FRL = −FRD, MRxL = −MRxD. (3.4)
Dobijeni izrazi pokazuju da redukcione rezultante dela sistema levoi desno od uocenog poprecnog preseka obrazuju osnovni ravnotezni sis-tem dok redukcioni momenti dela sistema levo i desno od uocenogpoprecnog preseka, u odnosu na teziste tog preseka, obrazuju dvaravnotezna sprega.
Kako ravnotezni sistem sila i spregova lezi u ravni nosaca yz reduk-cione rezultante FRL i FRD, leze u toj ravni kao i sprezne sile reduk-cionih momenata MRxL i MRxD ciji vektori imaju pravce ose x.
Posmatrajuci desni deo nosaca potrazicemo projekciju sile FRL nadva ortogonalna pravca: na pravac ose nosaca, osu z, i na pravac up-ravan na osu nosaca, osu y. Projekcija redukcione rezultante FRL, na

Dragan-Goca-Nenad
44 3 Gredni nosaci
pravac ose nosacaje normalim sila i oznacava se sa N . Njena projek-cija na pravac upravan na osu nosaca je transverzalna sila i oznacavase sa Ty = T . Redukcioni moment MRxL, je moment savijanja ilinapadni moment i oznacava se sa Mx, (sl. 3.7).
Ako posmatramo levi deo nosaca i redukcionu rezultantu FRD pro-jektujemo na iste pravce dobijamo tako -de normalnu siluN i transverzalnusilu Ty = T . Redukcioni momentMRxD je moment savijanja ili napadnimoment Mx (sl. 3.7).
Normalna sila N , transverzalna sila T i moment savijanja Mx, oddela sistema levo ili desno od uocenog poprecnog preseka predstavljajusile u preseku nosaca.
Kada se podsetimo da je projekcija rezultante sila na neki pravacjednaka algebarskom zbiru projekcija njenih komponenata na taj pravacdajemo sledece definicije normalne i transverzalne sile.
Normalna sila u uocenompoprecnom preseku je algebarskizbir projekcija svih sila delasistema koji lezi levo ili desno odtog preseka na pravac ose nosaca.Transverzalna sila u uocenompoprecnom preseku je algebarskizbir projekcija svih sila dela sis-tema koji lezi levo ili desno od togpreseka na pravac upravan na osunosaca.
P
N
T
M
T
M
N
Slika 3.8: Slika 8
Moment savijanja ili napadni moment u uocenom poprecnompreseku je algebarski zbir intenziteta momenata svih spregova i reduk-cionih momenata svih sila u odnosu na teziste tog preseka dela sistemakoji lezi levo ili desno od uocenog preseka.
Konvencija o znaku sila u preseku data je na slici 3.8. Pozitivnesile u preseku sracunate od dela sistema levo od uocenog poprecnogpreseka prikazane su levo od traga ravni π. Pozitivne sile u preseku oddela sistema desno od uocenog preseka imaju, prema tome, suprotnesmerove i date su desno od traga ravni π.
Prilikom obrazovanja algebarskih zbirova, koji se pominju u defini-cijama sila u preseku, sa pozitivnim znakom ulaze one naznacene velicine

Dragan-Goca-Nenad
3.4 Veza izme -du linijski raspodeljenog opterecenja, transverzalne sile imomenta savijanja 45
od dela sistema levo ili desno od preseka koje imaju smerove prikazanena slici 3.8, a sa negativnim znakom one koje imaju njima suprotnesmerove.
U opstem slucaju sa promenom poprecnog preseka u nosacu menjase i preraspodela sila i spregova ravnoteznog sistema u delovima kojileze levo i desno od tog preseka. Kao posledica toga, u opstem slucaju,vrednosti sila u preseku menjaju se duz ose nosaca. One su funkcijekoordinate z, tj. N = N(z), T = T (z) i Mx = Mx(z). Da bi sestekao uvid o njihovoj promeni na nosacu crtaju se dijagrami ovihfunkcija. To su staticki dijagrami ili dijagrami sila u preseku. Ordinateovih dijagrama predstavljaju vrednosti sila u preseku u odgovarajucimpoprecnim presecima nosaca.
Na kraju treba istaci da velicine sila u preseku zavise od rasporedasila i spregova na nosacu. Ako se postojeci ravnotezni sistem na nosacuzameni nekim drugim njemu mehanicki ekvivalentnim ravnoteznim sis-temom dobijaju se druge vrednosti sila u preseku. Tako, na primer,ako se linijski raspodeljeno opterecenje zameni koncentrisanom silom(paragraf 1.1.2) tada se deo sistema levo ili desno od preseka menjatek na mestu delovanja ove sile. To ne odgovara stvarnom rasporeduopterecenja na nosacu, jer se ova promena doga -da u svakom poprecnompreseku ispod linijski raspodeljenog opterecenja.
3.4 Veza izme -du linijski raspodeljenog opterecenja,
transverzalne sile i momenta savijanja
Posmatramo gredni nosac na koji deluje ravnotezni sistem sila i spre-gova u ravni yz: reakcije veza i spoljno opterecenje koje sadrzi i raspodel-jeno gravitaciono opterecenje cija promena sledi opsti zakon q(z) (sl.3.9).
z
q(z)
y
z dzO
1 O2
Slika 3.9: Slika 9

Dragan-Goca-Nenad
46 3 Gredni nosaci
Ispod kontinualnog opterecenja na mestu z izdvajamo elementarnideo nosaca duzine dz = O1O2 sa pripadajucim opterecenjem.
Uticaj dela sistema levo od pre-seka O1 uvodimo preko silau preseku: normalne sile N ,transverzalne sile T i momentasavijanja Mx. Uticaj delasistema desno od preseka O2
uvodimo tako -de preko sila u pre-seku. Na uocenom delu nosacadeluje gravitaciono raspodeljenoopterecenje q(z) tako da u pre-seku O2 normalna sila N ostajenepromenjena, dok transverzalnasila i moment savijanja imajuprirastaje. Ako se zadrzimo namalim velicinama prvog reda, tosu: T+dT i Mx+dMx, (sl. 3.10).
T+ Td
T M+ MdM
NN z
q(z) qo
ydz
O1 O
2
Slika 3.10: Slika 10
Polazeci od toga da je u pitanju ravnotezni sistem sila i spregova izd-vojeni element stapa je tako -de u ravnotezi pod dejstvom sila u presec-ima O1 i O2 i dela raspodeljenog opterecenja q(z) na izdvojenom ele-mentu nosaca.
Kao sto je uobicajeno zanemaruje se promena funkcije q(z) za be-skonacno mali prirastaj dz argumenta z. Tada je dijagram opterecenjana elementu stapa pravougaonik ordinate q(z) cija rezultanta Fq =q(z)dz polovi duzinu dz (paragraf 1.1.2). Skalarni usiovi ravnoteze(3.1) daju sledece jednacine:∑
i
Yi = 0 : T − (T + dT )− q(z) dz = 0,
∑i
MO2x = 0 : Mx − (Mx + dMx) + T dz − q(z) dz
1
2dz = 0.
Posle ponistavanja konacnih velicina T , −T i Mx, −Mx, svi clanovi uprvoj i drugoj jednacini su male velicine prvog reda izuzev poslednjeg

Dragan-Goca-Nenad
3.5 Gredni nosac opterecen torzionim spregovima 47
clana u drugoj jednacini koji je mala velicina drugog reda. Iz tog ra-zloga ovaj clan zanemarujemo. Postavljeni uslovi ravnoteze daju tadadiferencijalne veze izme -du raspodeljenog opterecenja, transverzalne silei momenta savijanja:
dT
dz= −q(z),
dMx
dz= T (z), (3.5)
Iz njih zakljucujemo sledece:
- prvi izvod transverzalne sile je funkcija raspodeljenog opteredenjasa promenjenim znakom,
- prvi izvod momenta savijanja je funkcija transverzalne sile.
Izraze (3.5) koristimo prilikom odre -divanja statickih dijagrama. Naprimer, ako na delu nosaca nema linijski raspodeljenog opterecenja, tj.ako je q(z) ≡ 0, tada je na tom delu transverzalna sila konstantna, amoment savijanja linearna funkcija koordinate z. Ili, ako je deo stapaopterecen jednoliko raspodeljenim opterecenjem, tj. ako je q(z) ≡ q0 ≡const., na tom delu nosaca je transverzalna sila linearna, a momentsavijanja kvadratna funkcija argumenta z. U poprecnom preseku z =z0, gde transverzalna sila menja znak, tj. gde je T (z0) = 0, javlja seekstremna vrednost momenta savijanja. Na slican nacin se analizirajuzakoni promene transverzalne sile i momenta savijanja i za druge oblikefunkcije raspodeljenog opterecenja q(z).
3.5 Gredni nosac opterecen torzionim spre-
govima
3.5.1 Oblici veza. Staticka odre -denost nosaca
U odeljku 1.1 bavili smo se grednim nosacem koji je izlozen delovanjuspoljnog opterecenja u svojoj ravni yz. Tom prilikom smo se podsetilida stap u ravni ima tri stepena sloboda krelanja. Veze koje su uvedeneu odeljku I.I.I oduzimaju stapu delimicno, ili u potpunosti, mogucnostikretanja u toj ravni.

Dragan-Goca-Nenad
48 3 Gredni nosaci
Uvodimo jos jednu vrstu opterecenja. To je opterecenje nosacaspreznim silama koje leze u ravnima njegovih poprecnih preseka. Nazi-vamo ih torzionim momentima ili moment uvijanja i oznacavamosa Mt. Zavisno od smera obrtanja vektori njihovih momenata pokla-paju se sa pozitivnom ili negativnom z osom.
Nakon uvo -denja opterecenja torzionim spregovima moramo uzeti uobzir i mogucnost obrtanja stapa oko svoje ose kao jos jedan stepenslobode kretanja. Njega dodajemo vec ranije utvr -denom broju od tristepena slobode kretanja koje ima stap u svojoj ravni. Zato pored vezakoje su opisane u odeljku I.I.I definisemo jos veze koje sprecavaju i obr-tanje oslonackih preseka u svojim ravnima xy. To su tzv. viljuskasteveze.
Pokretan zglob sa viljuskastom vezom (sl. 3.11a) sprecavapomeranje tacke A stapa u pravcu y ose i obrtanje oslonackog presekastapa oko z ose. Ova veza oduzima stapu dva stepena slobode kretanja.Kada se veza ukloni zamenjuje se sa dve nezavisne reakcije veze: silomYA u pravcu y ose i spregom momenta MtA, ciji vektor momenta imapravac ose z, pri cemu odgovarajuce sprezne sile leze u oslonackompoprecnom preseku A.
Nepokretan zglob sa viljuskastom vezom (sl. 3.11b) sprecavapomeranje tacke A stapa u ravni yz, duz dva ortogonalna pravca y i z, iobrtanje oslonackog preseka oko z ose. Ona oduzima stapu tri stepenaslobode kretanja. Uklonjena veza zamenjuje se sa tri nezavisne reakcijeveze: silama YA i ZA u pravcu y i z ose i spregom momenta MtA cijivektor ima pravac z ose.
Uklestenje sa viljuskastom vezom (sl. 3.11c) sprecava pomer-anje tacke A stapa u ravni yz, obrtanje stapa oko tacke A u toj ravni,i obrtanje stapa oko z ose. Ova veza oduzima stapu cetiri stepenaslobode kretanja. Kada se ukloni ona se zamenjuje sa cetiri nezavisnereakcije veze. To su sile YA i ZA u pravcu ose y i z, moment uklestenjaMA, ciji se vektor poklapa sa osom x, i spreg momenta MtA, ciji vektorima pravac z ose.

Dragan-Goca-Nenad
3.5 Gredni nosac opterecen torzionim spregovima 49
Slika 3.11: Slika 11
Podrazumevajuci da je gredni nosac, uz opterecenje torzionim spre-govima, sposoban da primi i opterecenje u svojoj ravni yz potrebno jeda ima oslonce koji oduzimaju bar cetiri stepena slobode kretanja satim da bar jedan od njih ima viljuskastu vezu.
Posmatracemo samo opterecenje grednog nosaca torzionim spregov-ima. Ravnotezni sistem spoljnih torzionih spregova i reakcija veza, kojesu tako -de torzioni spregovi, ispunjavaju skalarni uslov ravnoteze:
∑i
Mx = 0, (3.6)
koji sledi iz vektorskog usiova (3.3) i kazuje da je algebarski zbir mo-menata svih sila oko z ose jednak nuli.
Nosaci prikazani na slici 3.12 imaju samo jedan oslonac sa viljuskastomvezom u kome se javlja jedna nepoznata reakcija veze MtA. Za ovuvrstu opterecenja oni su staticki odre -deni jer je uslov ravnoteze Statikekrutog tela (3.6) dovoljan za odre -divanje njihove nepoznate reakcijeveze.

Dragan-Goca-Nenad
50 3 Gredni nosaci
Slika 3.12: Slika 12
Slika 3.13: Slika13
Nosaci na slici 3.13 imaju dva oslonca sa viljuskastom vezom, prematome i dve nepoznate reakcije veze: MtA i MtB. Da bi se dobiopotpun sistem jednacina za odre -divanje ovih reakcija veza uz uslovravnoteze (3.6) postavlja se i jedan dopunski, geometrijski, uslov kojise odnosi na deformaciju nosaca prouzrokovanu delovanjem zadatogsistema torzionih spregova. Za ovu vrstu opterecenja prikazani nosacisu jedanput staticki neodre -deni.

Dragan-Goca-Nenad
3.6 Moment torzije 51
3.6 Moment torzije
Pretpostavimo da na gredni nosac deluje poznati proizvoljan ravnoteznisistem torzionih spregova. To podrazumeva da smo prethodno odredilireakciju ili reakcije veza zavisno da li je nosac staticki odre -den ilistatitki neodre -den. Na osi nosaca uocavamo proizvoljnu tacku P i kroznju provlacimo ravan π upravno na njegovu osu. Ovim je ravnoteznisistem torzionih spregova podeljen na dva dela: deo koji lezi levo odtacke P i deo koji lezi desno od te tacke. Ako posmatramo desni deonosaca uticaj dela sistema koji lezi levo od tacke P zamenjujemo rezul-tujucim spregom momenta MRzL. Ako posmatramo levi deo nosacauticaj dela sistema koji lezi desno od uocenog preseka zamenjujemorezultujucim spregom momenta MRzD (sl. 3.14).
Slika 3.14: Slika14
Sistem torzionih spregova koji deluju na nosac zadovoljava drugiuslov ravnoteze u izrazu (3.3) tako da vazi:
MRzL = −MRzD, (3.7)
sto znaci da su u uocenom poprecnom preseku intenziteti momenataspregova MRzL = Mt i MRzD = Mt jednaki, a njihovi smerovi suprotni.
Tako smo razmatranjem, koje je analogno onom u odeljku 1.1.3,dosli do jos jedne sile u preseku. To je moment torzije i oznacava se saMt.
Moment torzije je algebarski zbir intenziteta svih torzionih spregovakoji leze levo ili desno od uocenog poprecnog preseka nosaca.

Dragan-Goca-Nenad
52 3 Gredni nosaci
Konvencija o pozitivnom momentu torzije data je tako -de na slici3.14. Od dela sistema levo od uocenog poprecnog preseka pozitivansmer je oznacen levo od traga ravni π. Od dela sistema desno oduocenog poprecnog preseka pozitivan smer momenta torzije oznacen jedesno od traga ravni π.
U opstem slucaju, sa promenom poprecnog preseka na nosacu menjase preraspodela torzionih spregova ravnoteznog sistema u delovima kojileze levo i desno od tog preseka. Ova sila u preseku je, kao i oneprethodne, zavisna od koordinatne ose stapa, tj. Mt = Mt(z). Dija-gram promene momenata torzijeje tako -de staticki dijagram, a njegoveordinate predstavljaju vrednosti ove sile u preseku u odgovarajucimpoprecnim presecima nosaca. I u ovom slucaju mora se imati u vidu dadijagram momenata torzije zavisi od rasporeda opterecenja na nosacu.Drugim recima, ravnotezni sistem torzionih spregova na nosacu nemoze se zameniti mehanicki ekvivalentnim sistemom jer bi tada doslodo promene dijagrama momenta torzije.

Dragan-Goca-Nenad
REGISTAR POJMOVA
stap, 19
geometrijski uslovi, 41glatka povrs, 15glavni moment, 33glavni vektor, 33greda sa prepustima, 39
jednoliko raspodeljeno opterecenje,42
klizac, 19konvencija o znaku, 44konzola, 39krak sile, 22
Moment, 21sile za osu, 25sile za tacku, 21
moment savijanja, 44moment sprega, 29moment uvijanja, 48
momentom uklestenja, 39
napadni moment, 44nepokretan zglob
sa viljuskastom vezom, 48nepokretni oslonac, 17nepokretni zglob, 38nosac, 39
oslonaccilindrican, 20
oslonci, 38
pokretan zglobsa viljuskastom vezom, 48
pokretni oslonac, 16pokretni zglob, 38princip
osloba -danja od veza, 14prosta greda, 39
ravan stapa, 37

Dragan-Goca-Nenad
54 REGISTAR POJMOVA
Ravan obrtanja, 21Ravnoteza, 6ravnoteza, 7reakcija veze, 13, 14reakcije veze, 38redukcija sile na tacku, 31rezultanta, 13
sferni oslonac, 20sila, 9
aktivna, 11, 13otpora, 11pasivna, 11, 14povrsinska, 10reakcije, 11spoljasnja, 11sprega, 29unutrasnja, 11zapreminska, 10
sistem, 7sistem sila, 12
ekvivalentan, 13kolinearni, 13paralelni, 13proizvoljan, 13prostorni, 13ravanski, 13suceljni, 13
spregkrak, 29ravan dejstva, 29
spreg sila, 29
Telodeformabilno, 7kruto, 7
teloslobodno, 13
vezano, 13torzer, 34torzioni momenti, 48transverzalna sila, 44
uze, 18uklestenje
sa viljuskastom vezom, 48ukljestenje, 18, 38
vezaidealna, 14reakcija, 13, 14spoljasnja, 14unutrasnja, 14
veze, 13viljuskaste veze, 48
zglob, 17