N dordre :UNIVERSITE * MOHAMED BOUDIAF * DE MSILA FACULTE DES
SCIENCES ET SCIENCES DE LINGENIEUR DEPARTEMENT DELECTRONIQUE
MEMOIREPrsent pour lobtention du diplme de MAGISTERSpcialit : Gnie
lectronique Option : ContrleParBDIRINA EL KHANSA SUJET DIAGNOSTIC
DE DEFAUTS D'ENGRENAGE PAR ANALYSE SPECTRALE Soutenue publiquement
le //2006Devant le jury compos de : Dr BOUAMAR MohamedM.C.
Universit de M'silaPrsident Dr CHIKOUCHE Djamel Prof. Universit de
StifRapporteurDrBENARIOUA YounesM.C. Universit de
M'silaExaminateurDr BOUZIT NacereddineM.C.Universit de Stif
Examinateur DrBENZID Redha C.C. Universit de M'sila Examinateur
A-PDF MERGER DEMO
RESUMETouteslesmachinesenfonctionnementproduisentdesvibrationsquipermettenten
effetdecaractriserlaplupartdeseffortsdynamiquesetenparticulierceuxengendrsparun
fonctionnement anormal .Ainsi l'analyse des vibrations est devenue
une technique trs rpandue
pourapprcierl'tatdesantd'unemachineafind'viterladfaillanceetn'intervenirqu'bon
escientetpendantdesarrtsprogrammsdeproduction.Lestechniquesclassiques
de dtection de la dfaillance dans les machines tournantes, bases
sur l'analyse de Fourier ont prouves leurs
limitationsentermesdersolutionspectrale(fluctuationd'unegrandevitesse),cequincessite
l'utilisationdesnouvellestechniquesdonnantuneanalyseplusperformante.Danscetravail,
nousappliquonslestechniquesparamtriquesbasedesmodlesARetlesmthodesde
dcomposition harmoniques surun signal vibratoire mis par un systme
d'engrenage constitu
dedeuxrouesdentesfonctionnantsousdesconditionsconstantes.Lesrsultatssont
encouragent,etlediagnosticdedfauts'effectuetraversl'observationdesvariationsdela
frquence d'engrenage dans l'volution du spectre de puissance durant
les 13 jours d'observation de la machine.
Motscls:signauxvibratoiresd'engrenage,analysespectrale,diagnosticdedfauts,modlede
Prony, modle de Pisarenko, modle de Levinson.
SUMMARYAllmachineryinworkingproducevibrationsthatpermittocharacterizemost
dynamiceffortsindeedandinparticularthosegeneratedbyanabnormalworking.Sothe
analysis of the vibrations became a very widespread technique to
appreciate the state of health of
amachineinordertoavoidfailingandtointerveneonlygoodknowledgeandduring
programmedstopsofproduction.Theclassictechniquesoffaultdetectionintherotating
machinery,basedonFourier'sanalysisprovedtheirlimitationsintermsofspectralresolution
(fluctuationofahighspeed),whatrequirestheuseofnewtechniques,givingmoreeffective
analysis.Inthiswork,weapplyparametrictechniquessuchasARmodelsandtheharmonic
methodsofdecomposition,onavibratorysignalgivenoutbyagearingsystemconstitutedof
twogearwheelsoperatingunderconstantconditions.Theresultsareencouraging,andfault
diagnosistakesplacethroughtheobservationofthegearingfrequency'svariationsinthe
evolution of the power spectrum during the 13 days of the machine's
observation. Keywords:vibration signal processing, spectrum
analysis, gear fault diagnosis, Prony's model, Pisarenko's model,
Levinson's model. =-- - '-----'- .-' - '-``` . ,-- -'-,-' ,-' .
,,-- --,- _-- -'= , ='- =-'-' = .'=' `'=. - -' '= `` ',---' -=
'----' -- .,'=- --,= ''=' -,-'`' ,=-' =' -=' ','-- '== - ,,' ,, -
_='-- -, ' '--` .,-`' ',---' '--` ,--' ``'== , '-'- =,--' =` --
,-=- _'= --- ,, .,'=- _'= .,'=-'' ---''- -,=' ,'--= ` .,'=- -,-=
',--- '--- -=,-- '-- . - `= .-' - ',---' ,-=-- ,-- ,'-'' ,=,--' `=
-AR _'=-,-' ,---' = '-,--- =-'- --- '=- = - ,- ,----- ,-'==,--'` -
-=- .- . ' _-'--' =-- --, ,=-- ' '== - ,-==`- '-` ----''` ==`-'
'-,, -= `'`' '-`'=-=~-- :`---'' ,----' '- ,-,=' .,'=-', '==' ,=-- ,
-- ,-,= , ,-,=,-,'-- , ,---,' ,-,= . Universit de M'sila
2005/2006
Remerciements Mes remerciementset ma gratitude se portent tout
d'abord vers Monsieur D.CHIKOUCHE, Professeur et Vice Doyen charg
de la post graduation, la recherche scientifique et les relations
extrieures au niveau de la Facult des
sciencesdel'Ingnieur,UniversitF.AdeStif,quim'aencadretguid
quotidiennementpendantmathseetasum'orienterverslesaxeslesplus
pertinents. Je le remercie pour ses comptences, son ouverture
d'esprit et sa
grandedisponibilit.Touteslesrecherchesmenespendantcetteannese
sontappuyessursonexpertisequiaguidnombredemeschoixet conclusions.
Mespensessetournentensuitetoutnaturellementverslesmembresdu
jurydel'intrtqu'ilsontclairementmanifestpourcetravail,etdes
remarques et corrections qu'ils ont apportes ce document : Monsieur
M.BOUAMAR matre de confrence l'U.M.B de M'sila, m'a fait un grand
honneur en acceptant de prsider le jury de cette thse.
J'exprimetoutemagratitude:MonsieurY.BENARIUOAmatrede confrence
l'U.F.A de Stif, Messieurs N.BOUZIT matre de confrence etR.BENZID
charg de cours lU.'M.B de M'sila pour avoir accept d'tre les
examinateurs de ce mmoire.
Enfin,jetiensexprimermareconnaissanceMonsieur
N.Haloui(SUPELECdeParis)etMonsieurR.Hadjarprofesseur
l'universitdeRiadpourleurcontributionetlapertinencedeleurs
remarques. Je n'oublie videmment pas toutes les personnes qui m'ont
soutenue durant ce travail spcialement mon trs cher pre.
SOMMAIRE
LISTEDES FIGURES LISTE DES TABLEAUX INTRODUCTION GENERALE..01
CHAPITRE I : LES SYSTEMES D'ENGRENAGESINTRODUCTION....04 I.1. LES
ENGRENAGES..04I.2.DEFAILLANCE.....06 I.2.1.Causes de dfaillance06
I.2.2.Dfauts d'engrenage......07 I.2.2.1. Les dfauts rpartis sur
toutes les dents...07 I.2.2.2. Les dfauts localiss sur des dents
particulires...08 I.3.SIGNAUX VIBRATOIRES DELIVRES PAR UN
ENGRENAGE.....08 I.3.1.Engrenagesans dfauts....08 I.3.2.Engrenage
avec dfauts.09 I.3.3.spectre d'engrenage09 I.3.4.Principale s
sources de vibrations dans un
engrenage...10I.4.MAINTENANCE....10I.4.1. Maintenance
ractive11I.4.2. Maintenance prventive11 I.4.3. Maintenance
conditionnelle ou prdictive11 I.4.4. Maintenanceadaptative ou
marginale.12 I.5.DIAGNOSTIC D'ENGRENAGE......12 I.5.1Classification
des mthodes de diagnostic.13 I.5.1.1 Les mthodes internes de
diagnostic.13 I.5.1.2.Les mthodes externes de diagnostic...14
I.5.2.Mthode de diagnostic..14I.5.3.Diagnostic par analyse
spectrale...15 I.5.3.1. Mthodes non paramtriques d'analyse
spectrale....16 I.5.3.2. Mthodes paramtriques d'analyse
spectrale....17 I.5.3.3. Mthodes de dcomposition harmonique...19
CONCLUSION.19 CHAPITRE II: L'ESTIMATION SPECTRALE PAR LES METHODES
DE DECOMPOSITIONHARMONIQUE INTRODUCTION....22 II.1. ESTIMATEURS
D'HARMONIQUES...22 II.2.METHODE DE PRONY....23 II.3.METHODE DE
PISARENKO....27 II.4.DETERMINATIONDE L'ORDRE.........29 II.5.
SIMULATION............30 II.5.1.Programme de simulation........30
II.5.2.Dfinition du rapport signal sur bruit..33 II.5.3.Signaux
simuls...33 II.6. RESULTATS ET INTERPRETATIONS....35 II.6.1. Modle
de Prony........35 II.6.2. Mthode de Pisarenko.........38
CONCLUSION.40 CHAPITRE III: L'ESTIMATION SPECTRALE PAR LES
METHODESPARAMETRIQUES BASEES SUR LE MODELE AR
INTRODUCTION........43 III.1. REPRESENTATION DU MODELE AR...43
III.2. RESOLUTION RECURSIVE DE LEVINSON DURBIN.........44 III.3.
SIMULATION ET PROGRAMME.....48 III.4. RESULTATS ET
INTERPRETATIONS.....50 CONCLUSION........55 CHAPITRE IV : DETECTION
DES DEFAUTS D'ENGRENAGES PAR ANALYSE SPECTRALE
INTRODUCTION.......58 IV.1.PRESENTATION DU SYSTEME ETUDIE........59
IV.2.PROGRAMME ET SIMULATION DU DIAGNOSTIC.......60
IV.2.1.Reprsentation temporelle62 IV.2.2.Rsultats et interprtation
du spectre de puissance..63 IV.2.2.1.Mthode de Pisarenko.63
IV.2.2.2.Mthode de Prony.......65 IV.2.2.3.Mthode de Levinson..67
IV.3. ETUDE COMPARATIVE.........70 CONCLUSION...70 CONCLUSION
GENERALE BIBLIOGRAPHIE ANNEXE A ANNEXE B Listedes figures Fig I.1 :
Systme d'engrenage.05 Fig I.2 : Les diffrents types
d'engrenages..06 Fig I.3 : Causes de dfaillances lies la
construction07 Fig I.4 : Dfaillances lies au phnomne de
corrosion..07 Fig I.5 : Comparaison dun signal dengrenage sain et
celui dtrior ..10 Fig I.6 : Structure de la maintenance
conditionnelle12 Fig I.7 : Les diffrentes tapes du diagnostic
industriel......13 Fig I.8 : Principe du diagnostic interne..14 Fig
I.9 : Modle paramtrique.18 FigII.1 : gnration du signal de
test...31 Fig II.2 : Gnration de la DSP du signal test.....32 Fig
II.3 : Reprsentation temporelle du signal modle 134 Fig II.4 :
Reprsentation temporelle du signal modle 234 Fig II.5 : Spectre de
puissance obtenu par la mthode de Pronypour un processus somme de
deux sinusodes bruit..36 Fig II.6 : Spectre de puissance obtenu par
la mthode de Pronypour un processus d'ordre quatre bruit37 Fig II.7
: Spectre de puissance obtenu par la mthode de Pisarenko pour un
processus somme de deux sinusodes bruites.38 Fig II.8 : Spectre de
puissance obtenu par la mthode de Pisarenko pour un processus
d'ordre quatre bruit38 Fig III.1 : Organigramme de simulation...49
Fig II.2 : Spectre de puissance obtenu par la mthode de Levinson
pour un processus somme de sinusodes bruites53 Fig II.3 : Spectre
de puissance obtenu par la mthode de Levinson pour un processus
d'ordre quatre bruit...55 FigIV.1 : Principe de lchantillonnage
angulaire..59 Photos no 1: Capteur Acclromtre, Codeur Optique,
Amplificateur de Charge, le Chssis ses modules...60 FigIV.2 :
Organigramme de simulation.61 Fig IV.3 : Signal mis par le systme
tudi.63 Fig IV.4. : Spectres de puissances obtenus par la mthode de
Pisarenko..65 Fig IV.5 : Spectres de puissances obtenus par la
mthode de Prony......67Fig IV.6 : Spectres de puissances obtenus
par la mthode de Levinson .69 Listedestableaux Tableau I.1 1 : Les
statistiques sur les causes de dfaillance dans les lments
engrenage.....08 Tableau II.1 : Dtection frquentielle par la mthode
de Prony..................37Tableau II.2 : Dtection frquentielle
par la mthode de Pisarenko.......40 Tableau II.1 : Dtection
frquentielle par la mthodede Levinson modle154 Tableau III.2 :
Dtection frquentielle par la mthode de Levinson modle 2.56 Tableau
IV.1 : Evolution du pic principal..67 Tableau IV.2 : Evolution du
pic principal.....69 Introduction ggnrale 1 INTRODUCTION GENERALE
Souslapressiondelaconcurrencemondiale,lesinstallationsdeproductionontvuleurs
performancescrotrergulirement.Lesmachinessontdeplusenplussollicites,vitessede
rotation,duresdefonctionnementetefficacitaugmentent.Ils'ensuituneaugmentationdes
dgtsetdespannesquientranentdesarrtsnonprogramms.Lescotsd'arrtdeproduction
sontdanscescasnettementsuprieursauxcotsderparationetderemiseentat.Ainsila
prventiondesdgtsdesmachinesapourchaqueentrepriseunegrandesignification
conomique. [1]
Continuitdanslaproduction,maintiendel'outil,respectdel'environnementetsuccs
conomiquesnepeuventtregarantisdansletempsqu'l'aided'unemaintenancequiprvient
efficacement les dgts et les pannes, et qui utilise de faon
optimale le potentiel des machines.
Cesdeuxconditionsnepeuventtrerempliesqueparlamiseenuvredelamaintenance
conditionnelle. [2]
L'objectifprincipald'unebonnesurveillanceestdedtecterlesanomaliesdefonctionnement
avant qu'elles ne prsentent un risque pour la machine.Lorsqu'un
dfaut est dtect, il faut tre
capabledeprcisers'ilestgrave,sil'onpeutcontinuerexploiterlamachine,etdanscecas
combien de temps on peut la laisser en fonction(tourner) avant de
l'arrter. [3]
Pourassurercettesurveillance,ondisposed'informationsreprsentatives(symptmes)des
dfautssurveiller.Cesinformationssontvidementcellesquisontaccessibleslamesure:
Tempratures, pressions, dbits, vibrations, etc. [4]
Eneffetladisponibilitdel'appareildeproduction,sontatdefonctionnementainsiquesa
maintenance sont des soucis majeurs de l'industrie actuelle. A
travers lamesure, le stockage,et
l'analysedessignauxvibratoires,ilestpossibledemettreaupointdesprocdsefficacesde
surveillance et de diagnostic des machines. [5]
Lasurveillanceparlesvibrationspeutservlerunemthodeefficacepourparveniraux
rsultats,etparfoismoindrefrais.Cedernierpointquireprsentel'aspectconomiquedela
surveillancen'estpasngligeablepourunindustriel.L'utilisationdesvibrationsfaitintervenir
une phase d'analyse du signal vibratoire recueilli sur la machine
surveiller. [6]
Certainsdfautsdanslesmachinestournantessontcaractrisspardeschocsse
traduisantpardesnon-stationnaritslocalessurlessignauxvibratoires;c'estlecasdansles
engrenagesol'caillageetlafissurationdedentsproduisentdeschocslocalisslorsde
Introduction ggnrale
2l'engrnementdesdentsincrimines.Ceschocspeuventtredefaiblesamplitudeslorsquele
dfautestnaissant.Cetypededfautsvoluantrapidementverslarupture,ilestncessairede
les dtecter de faon prcoce, pour pouvoir planifier une maintenance
efficace d'une part, et pour
desraisonsdescuritd'autrepart,d'olerecoursauxtechniquesdedtectiondesnon-stationnaritsquiontmontrdemeilleuresperformancesquelestechniquesclassiquesfondes
sur l'analyse de Fourier .Cette dernire donne de bons rsultats pour
des dfauts que l'on pourrait
qualifierde(simple),telsquelebalourd.Elleestsouventinefficacelorsquelesdfautssont
caractrisspardesvariationscomplexesduspectre,etplusparticulirementpardesnon-stationnarits
dans le signal vibratoire. Par ailleurs, il faut noter que les
signaux vibratoires sont
trsrichesenharmoniques;d'oladifficultd'apprciationdesvariationsduesauxnon-stationnarits.
Une autre limitation d'analyse de Fourier est due au fentrage des
donnes qui se
manifestelorsdutraitementparFFT.Cefentrageapoureffetdecachercertainsdtails
spectraux qui sont rellement prsents [3]. Ce sont les raisons pour
lesquelles il faut utiliser des
outilsdetraitementdusignalcapablesdesuivredansletempsdeschangementsrapidesde
caractristiques [7].
Cetravaildemagisterapourbutdeprsenterl'apportdesmthodesparamtriquespourla
surveillanceetlediagnosticdesdfauts,basessurl'analysespectraleparlesmodles
autorgressifs (AR) et Prony des signaux vibratoires mis par un
rducteur engrenage de deux roues dentes. Le mmoire est organis en
quatre chapitres: Le premier chapitre prsente des gnralits sur les
systmes d'engrenages, les notions de
maintenanceetlesdiffrentestechniquesdecontrledesmachinesindustrielles.Il
justifie galement le choix des vibrations comme moyen de diagnostic
et de surveillance des machines tournantes.
Ledeuximechapitreestconsacrauxmthodesdedcompositionharmoniques,de
Pisarenko et de Prony, alors que les mthodes autorgressives seront
dveloppes dans le troisime chapitre. Toutes ces mthodes sont values
l'aide des signaux modles.
Ledernierchapitreprsentelesrsultatsdesimulationdel'applicationdesmthodes
tudies en deuxime et troisime chapitre au traitement des signaux
vibratoires produits par lesystme d'engrenage sous test. Et on
termine par une conclusion gnrale. Introduction ggnrale 3 Les
systmes d'engrenages4 CHAPITRE I LES SYSTEMES D'ENGRENAGES
INTRODUCTION
Lesrducteursengrenagesontdeslmentsdetransmissionimportantsdansleslignes
d'arbredesmachinestournantes.Onlesrencontredanstouslestypesd'industrie,commel'industrie
automobile (boite de vitesse), la petite et grosse industrie de
processepar exemple les cimenteries o les roues atteignent des
diamtres de 3 4 mtres lorsque il s'agit de transmettre
despuissancesd'unedizainedeMwatts.Cesontdeslmentsmcaniquestrssollicits[8,9],
complexesdimensionneretraliser(calcul,choixettraitementdesmatriaux,taillagedes
dents,..),quipeuventprsenterdesdfaillanceslimitantleurduredevie.Afind'viterdes
ruptures soudaines et pour diminuer les cots de maintenance en
milieu industriel, des mthodes
particuliresdediagnosticontfaitl'objetdedveloppementsspcifiques,notammentpour
rsoudre les problmes vibratoires des machines tournantes.
Danscechapitre,nousallonsprsenterlescaractristiquesdessystmesd'engrenagesetles
techniques de diagnostic des dfauts qu'ils peuvent subir.
Les systmes d'engrenages5
I.1. LES ENGRENAGES [10]
L'engrenageestundispositiflmentaireconstitudedeuxorganesrigidesetdentsR1et
R2 gnralement cylindriques ou coniques, appels roues, possdant N1
et N2 dents qui tournent aux vitesses V1 et V2autour d'axes fixes,
des frquences de rotation f1 et f2 respectivement et une frquence
d'engrnement donne par: feng= N1 f1=N2 f2....(I.1)
Lesengrenagesserventprincipalementtransmettreunmouvementcirculaireouderotation
entredeuxarbres.S'ilssontmunisderouesengrenantdessectionsdentesrectilignes,ils
transformentunmouvementrectiligne,alternatifounon,enmouvementderotation,et
inversement.Lerapportdesvitessesderotationdecesdeuxarbres,appelrapportde
transmission, est constant et inversementproportionnel au nombre de
dents de chacune des deux roues de l'engrenage. Fig I.1: systme
d'engrenage On classe les nombreux types d'engrenages existants
comme suit [9]: Engrenage cylindriques : dont les arbresde deux
roues sont parallles.
Engrenageconiques:lesdeuxarbressontconusdetelsortequelesprolongementsde
deux axes se recoupent. Engrenage gauches: les deux arbres occupent
des positions relatives quelconques. La crmaillre : c'est un
segment d'engrenage dont l'axe de rotation est rejet l'infini.
Pignon vis sans fin: ils sont constitus par une paire de pignon
avec une vis sans fin. Les systmes d'engrenages6 Fig I.2: Les
diffrents types d'engrenages
I.2.DEFAILLANCE [3,11,12]
Unedfaillanceestl'altrationoulacessationdel'aptituded'unensembleaccomplirses
fonctionsrequisesaveclesperformancesdfiniesdanslesspcificationstechniques.Les
dfaillances peuvent tre classes selon diffrents critres: Dfaillance
progressive ou soudaine, selon la rapidit de leur manifestation.
Dfaillancepartielleoucomplteouintermdiaire,selonl'amplitude(lafonctionestdgrade
ou absente).
Dfaillanceprcoce,tauxconstantoud'usure,selonlemomentd'apparitiondansle
cycle de vie du matriel.
Dfaillancemineure,significative,critiqueoucatastrophique,selonleureffetsurle
systme, l'environnement et l'homme. Dfaillance premire, seconde et
de commande, selon les causes des dfaillances. I.2.1.CAUSES DE
DEFAILLANCE
Lanormedfinitlacausededfaillancepar"Lescirconstanceslieslaconception,la
fabrication ou l'emploi et qui ont entran la dfaillance". Pour
montrer la difficult de la matrise
desmcanismesderuinelesfigures(I.3)et(I.4)reprsententlesprincipalescausesde
dfaillance induites lors de la construction oulies aux phnomnes de
corrosion
Les systmes d'engrenages7
Fig I.3: Causes de dfaillances lies la construction Fig I.4:
Dfaillances lies au phnomne de corrosion
I.2.2.DEFAUTS D'ENGRENAGE
Vul'importancedesrducteursetlacomplexitdecessystmesmcaniques,l'analysedes
dfaillances de ces lments a t ralise. Le tableau (I.1) prsente des
statistiques sur les causes de dfaillance et la localisation des
dfauts dans les lments engrenage. Corrosion Localise Gnralise Haute
tempratures Piqre Fissuration Uniforme Slective Corrosion sche
OxydationCauses lies la construction Fabrication incorrecteSous
dimensionnementContrle incorrect de fabrication Matriau Traitement
thermique Dessin Choix des matriaux Procdures incorrectesMatriel de
contrle insuffisantLes systmes d'engrenages8 Origine des dfauts
Pourcentage Localisation des dfauts Pourcentage Fabrication
(calcul, assemblage, matriaux, etc..) 40%Dentures60% Exploitation
(maintenance) 43%Palier19% Autres (machines adjacentes) 17%Arbre10%
Carter 07% Autres 04% Tableau I.1 1: Les statistiques sur les
causes de dfaillance dans les lments engrenage. I.2.2.1. LES
DEFAUTS REPARTIS SUR TOUTES LES DENTS L'usure : due au glissement
entre les lments qui est la consquence d'un enlvement de matire de
l'ordre de quelque microns [3,8,13].
Legrippage:dueunemauvaiselubrificationquiengendreuneforteadhrencedes
surfaces en contact. Le pitting : C'est une dtrioration
superficielle qui se manifeste par de trs fortes piqres
etmmeparfoisdestrouslasurfacedesdentures,pouvantvoluersuivantles
matriauxversladestructiondel'engrenage.Ceprocessusvoluegnralement
lentement en comparaison avec la dure de vie des rducteurs.
I.2.2.2. LES DEFAUTS LOCALISES SUR DES DENTS PARTICULIERES
Fissuration:c'estlafissurationdedents(gnralementparfatigue)quiconduit
rapidement la rupture de la dent.
L'caillage:Onletrouvedanslesengrenagescimentstremps(dontlacouche
superficielleestdurcie).C'estleprincipaldfautquivoluegalementtrsviteversla
rupture.Il est caus par une pression superficielle trs
importantemalgr que la marge prise lors des dimensionnements ne
peut tre matrise (exemple couple au dmarrage). Les systmes
d'engrenages9 I.3.SIGNAUX VIBRATOIRES DELIVRES PAR UN ENGRENAGE
La vibration consiste en un mouvement de va et vient d'une
machine ou d'un de ses lments
depuissapositionderepos.Lesvibrationsd'unengrenagesontproduitesprincipalementparle
choc entre les dents des deux roues qui le composent. Ce choc est
affaibli au maximum par une
optimisationdelaformedesdents,unedveloppantedecerclelgrementcorrigepourtenir
compte de la dflexion sous la charge. Mais cette optimisation n'est
valable que pour une charge donne et de plus, l'usure dtriore peu
peu cette forme.D'autre part, cette vibration appele signal
d'engrnement, qui est la source du bruit rayonn
parlesmachines,subitunfiltrageetdesdformationscausesparlastructuredelamachine,
entre la source et le point d'engrnement. I.3.1. ENGRENAGESANS
DEFAUTS
Considronsunengrenageavecdesdentsparfaitementidentiquessansdfauts.Des
excitationsseproduirontchaqueengrnementd'unepairededents.Lesignalvibratoire
engendr par cet effort est recueilli au niveau du palier. Le signal
vibratoire d'un engrenage idal est de type : ) 2 . ........(
.......... .......... .......... .......... )......... ( ) 2 sin( )
(1I t e t Zf a t xi RNii+ + == O e(t): bruit blanc i : la phase
initiale du mouvement.fR : la frquence de rotation de l'arbre.Z :
nombre de dents d'une roue dente.i : nombre des harmoniques.
I.3.2.ENGRENAGE AVEC DEFAUTS
Pourtenircomptedel'effetdecertainsdfautsoudevibrationdetorsion,lemodle(I.1)va
s'crire en supposant l'existence de modulations d'amplitude et de
phase: ) 3 . .........( .......... .......... .......... ..........
)......... ( )) ( 2 sin( ) ( ) (1I t e t t Zf t a t xi RNii+ + ==
Les systmes d'engrenages10
I.3.3.SPECTRE D'ENGRENAGE [14]
Dansunengrenageidal,chacunedesrouesestforme de dents identiques et
rgulirement
espaces.Lesignalacclrationtantpriodique,sonspectreestcomposd'harmoniquesdela
frquence d'engrnementfeng=Ni fi avec fi la frquence de rotation de
la roue Riet Ni le nombre
dedentsdelaroue.Unepriodicitapparatraencasdedtriorationd'unedent.Doncles
harmoniques de fi correspondant la dent dfectueuse viennent
s'ajouter au spectre prcdent. En pratique, un engrenage sain n'est
pas idal en raison de disparits gomtriques; il possde
unspectrecomposdesharmoniquesd'engrnement.Ladtriorationdelasurfacedecontact
donnenaissanceunefluctuationdelachargetransmisequisetraduitparunemodulation
d'amplitudedusignalvibratoire.Undfautdedenturerendral'intervalleentredeuxdents
irrgulier;cequientraneunefrquenced'engrnementinstantanevariantautourdelavaleurfeng=Ni
fi
FIG I.5 :COMPARAISON DUN SIGNAL DENGRENAGE SAIN ET CELUI
DETERIORE [39]
I.3.4.PRINCIPALES SOURCES DE VIBRATIONS DANS UN ENGRENAGE Parmi
les sources essentielles d'excitation d'un engrenage en mouvement
on peut noter [3, 4,14]: L'erreur de coaxialit dans les roues
engrenage qui provoque des vibrations (balourd). La modification du
profil due l'erreur de fabrication et la dformation des dents. Les
systmes d'engrenages11
L'influencedesarbresetgrandeursdesmasses(accouplement,moteur,)surlacharge
dynamique.
Leschocsentrelesdentsl'amorcedel'engrnementlorsqueladentnondforme
supporte une fraction de la chargetandis que les autres dents se
dchargent. La dformation variable des dents produit la variation de
la charge le long des profils des
dentsetunevariationdelachargetraverslaligned'engrnementpourunepairede
dents en contact. Les forces de frottement variables en sens.
L'expulsion de l'huile et de l'airde l'entre dent. Les fluctuations
de la charge des dents surviennent durant l'engrnement des dents
mme dans les conditions de la charge constante. I.4.MAINTENANCE [3,
4, 12]
Lamaintenancedesmachinesaunegrandesignificationconomiquepourtouteentreprise.
Lacontinuitdanslaproduction,lasauvegardeducapital,lerespectdel'environnementetle
succsconomiquenepeuventtregarantisqueparunemaintenancequianticipelesdgtset
les catastrophes. Pour la maintenance des machines, on distingue
trois stratgies: I.4.1. MAINTENANCE REACTIVE
AppelemaintenancecorrectiveselonlanormeAFNORNFX60-010,maintenanceeffectue
aprs altration d'un bien accomplir la fonction requise (donc aprs
la dfaillance). Ce type de
maintenanceestleplusrpondu,maisilconsisteintervenirunefoisquelemalestfait,en
effectuantdesrparations:ilestdonclepluscoteux.Deplus,lesdfaillancessurvenantde
manire non prvisible, l'organisation de cette activit est limite.
I.4.2. MAINTENANCE PREVENTIVE
AppelmaintenancesystmatiqueselonlanomeAFNORNFX60-100effectueselondes
critresprdtermins,dansl'intentionderduirelaprobabilitdedfaillanced'unbienoula
dgradationd'unservicerendu(doncavantladfaillance).Cettemaintenanceestsystmatique,
danslesensolesvisitesd'entretienvonttreprogrammesselonuneexploitationstatistique
desdonnesrecueilliessurlesartefacts.Lesurcotentranpardesvisitessystmatiquesest
pondr par la planification qui peut en tre faite, et par la
diminution des arrts de productions due la limitation de la
maintenance corrective. Les systmes d'engrenages12
Danscertainscas,cettemaintenanceestvitalepourassurerlascuritdusystmeetdeson
environnement (transports ariens, centrales nuclaires) I.4.3.
MAINTENANCE CONDITIONNELLE OU PREDICTIVE
Elleconsistesurveilleretanalyserdefaoncontinuel'tatdefonctionnementetson
volutiondansletempsdesinstallationsoudesmachinesenpratique;cequ'onappelleune
surveillance de l'tat des machines et ceci pendant les phases de
dmarrage, de fonctionnement et
d'arrt.Laconnaissanceetletraitementdecesdonnespermetdedcelerlesanomaliesde
fonctionnement et de dcider les interventions ncessaires.
Cettemthodeprsentedoncl'avantaged'viterlasurprise,depermettregnralementla
planification de l'intervention et de limiter au strict minimum les
arrts des machines. En outre, la grance des pices de rechange est
facilite et la dure des arrts est limite.
Traitement Mesure de Machine serveiller vibrationdu signal
ConditionsOuilimites acceptables
NON Action
Fig I.6:Structure de la maintenance conditionnelle
Les systmes d'engrenages13DiagnosticDcisionMesureet
observationI.4.4. MAINTENANCEADAPTATIVE OU MARGINALE
Elle estnon dfinie par l'AFNOR. Cette maintenance, apparue grce
au dveloppement des
cerclesdequalit,apourobjectifl'amliorationdeladuredeviedesquipements.Ceciest
ralisenmodifiantlesquipements,d'aprslesremarqueseffectuesparlesoprations,par
exemple dans les cercles de qualit. I.5.DIAGNOSTIC D'ENGRENAGE [3,
11, 12] Le diagnostic d'aprs AFNOR est l'identification de la cause
probable de la dfaillance l'aide d'un raisonnement logique fond sur
un ensemble d'informations provenant d'un contrle ou d'un test
Validation des mesures Caractrisation du fonctionnement
Dtection
Identification de la cause
ConsignesMaintenance
PROCESSUSINDUSTRIEL Fig I.7:Les diffrentes tapes du diagnostic
industriel
Les systmes d'engrenages14 I.5.1CLASSIFICATION DES METHODES DE
DIAGNOSTIC I.5.1.1 LES METHODES INTERNES DE DIAGNOSTIC
Cettefamilledemthodesestprincipalementdrivedestechniquesutilisesparles
automaticiens.Apartirdesmodlesphysiquesoudecomportementvalidsparlestechniques
d'identificationdeparamtre,ildevientpossibledemettreenuvrelamthodeduproblme
inverse.Lediagnosticdedfaillanceestpossibleensuivantentempsrell'volutiondes
paramtresphysiquesoubienenutilisantl'inversiondemodledetype"boitenoire".Elles
impliquentuneconnaissanceapprofondiesouslaforme de modles
mathmatiques qui devront tre obligatoirement valids
exprimentalement en trois grandes familles: Les mthodes du modle.
Les mthodes d'identification de paramtres. Les mthodes d'estimation
du vecteur d'tat. uy Processus Entres , XSorties Estimation de
Paramtre ou d'tat ModleSimplifier ,X Temps Fig I.8:Principe du
diagnostic interne I.5.1.2.LES METHODES EXTERNES DE DIAGNOSTIC Ces
mthodes supposent qu'aucun modle n'est disponible pour dcrire les
relations de cause
effet.Laseuleconnaissancereposesurl'expertisehumaineconforteparunsolideretour
d'exprience.Danscettecatgorie,onretrouvetouteslesmthodesbasessurl'intelligence
artificielle. Les systmes d'engrenages15 I.5.2.MTHODE DE DIAGNOSTIC
I.5.2.1. METHODE DE DIAGNOSTIC DE DEFAILLANCE PAR MODELISATIONS
FONCTIONNELLES ET MATERIELLES Le principe des mthodes de
modlisation des dfaillances fonctionnelles est d'tablira priori
demanireformelleetexhaustivelesliensentreles causes initiales des
dfaillances et de leurs effets mesurables par les oprateurs ou les
systmes de traitement de l'information. I.5.2.2.METHODES DE
DIAGNOSTIC PAR MODELISATION PHYSIQUE Contrairement aux mthodes de
l'analyse fonctionnelle qui dcoulent des analyses de sret de
fonctionnement, ces mthodes proviennent des domaines de
l'automatisation de procds et de la simulation numrique. Elles
impliquent une connaissance approfondie du fonctionnementsousla
forme de modles mathmatiques qui devront tre obligatoirement valids
exprimentalement avant toute utilisation industrielle.Elles se
regroupent en trois grandes familles:
Lamthodedumodle:lamthodedediagnosticdedfaillanceparlamthodedu
modleconsistecomparerlesgrandeursdduitesd'unmodlereprsentatifdu
fonctionnementdesdiffrentesentitsduprocessusaveclesmesuresdirectement
observes sur le processus industriel. La mthode de diagnostic par
identification de paramtres : cette mthode s'applique au
castrsparticulierol'onsouhaitesuivrel'volutiondecertainsparamtresphysiques
critiquespourlefonctionnementd'unprocessusetquinesontpasmesurables
directement. La mthode de diagnostic par estimation du vecteur
d'tat: La gnralisation du principe de diagnostic de dfaillance par
la mthode de l'identification de paramtrea t rendue
possibleenconsidrantlesmodlesphysiquesd'unprocessussouslaformed'quation
d'tat. I.5.2.3. METHODES DE DIAGNOSTIC PAR ANALYSE DES SIGNATURES
EXTERNES Ces mthodes s'appliquent dans les situations o la
modlisation des mcanismes reliant les
causesdesdfaillancesetdesdgradationsnesontpastechniquementmodlisable.Les
mthodesseclassentendeuxfamillessuivantlapopulationdesmatrielsdiagnostiquer.En
prsence d'un parc important de matriels identiques, l'utilisation
de techniques statistiques
Les systmes d'engrenages16 appliques aux donnes de retour
d'exprience permet d'tablir posteriori des corrlations entre
lesdfaillancesidentifiesaprsrparationetlessignaturesexternes.Parcontre,enprsence
d'un nombre rduit, l'expert humain est le seul capable, partir des
signatures externes d'tablir
lesdiffrentescorrlationspourtablirlediagnosticdeladfaillanceparclassificationdes
signatures. I.5.3.DIAGNOSTIC PAR ANALYSE SPECTRALE [4, 15]
Lespectreestleconceptfondamentaldel'analyseenfrquencedontlesignal
amplitude/temps est converti en amplitude/frquence. Il est reprsent
sous forme d'un graphique
montrantl'amplitudedelavibrationchaquefrquence.Apartirdescaractristiquesd'une
machine surveille, et des frquences auxquelles apparaissent les
anomalies, il est donc possible de dtecter l'origine d'un dfaut et
d'en suivre l'volution. Les anomalies spectrales peuvent tre classs
en trois catgories: Pics apparaissant des frquences multiples ou
sous multiples de la vitesse du rotor. Pics apparaissant des
vitesses indpendantes de la vitesse du rotor. Densit spectrale
provenant de composantes alatoires de la vibration. I.5.3.1.
METHODES NON PARAMETRIQUES D'ANALYSE SPECTRALE [15, 16, 17]
Cesontdesmthodesquinemettentpasenjeulaconsidrationd'aucunmodle
paramtrique.L'estimationspectrales'effectuedirectementpartirdelatransformedeFourier
dusignal,oudesonautocorrlation.Nousexposonsicilesmthodeslesplusconnuesd'entre
elles: a-Priodogramme : La mthode la plus simple de calculer une
estimation de densit spectrale de puissance d'un signal x(n) est
sans doute d'utiliser la technique dite du Priodogramme, qui est
tout simplement le module carr de la transforme de Fourier discrte
du signal analys, soit : ) 4 . ..( .......... .......... ).........
( ) (1) 2 exp( ) (1) (210I f x f xNf j n xNf PNnn pd= == O N est le
nombre d'chantillons du signal. Les systmes d'engrenages17
Ils'agitd'unestimateurnonbiaismaisnonconsistant,cequiestuninconvnientmajeursi
l'onrechercheunersolutionapprciable.Onpeutrduirecettevarianceenestimantle
priodogrammemoyenn:ils'agitdediviserlesignalanalysenktranchesetd'estimerpour
chacunedespriodogrammesetderetenircommeestimationfinaledupriodogrammela
moyenne des k estimations. La variance s'en trouve ainsi divise par
k, mais cela est au dtriment
delarsolutionfrquentiellequis'entrouveaffaibliepuisqu'onrduitdeklaproportion
d'chantillonsutiliss pour l'estimation de chaque priodogramme.
b-Corrlogramme: Le Corrlogramme [4] est en fait une simple
discrtisation sur une fentre d'analyse contenant N donnes de la
formule d'estimation de la densit spectrale de puissance pour un
signal continu, il vient donc : ) 5 . ( .......... ..........
.......... .......... .......... .......... ) (112I e R f PNNjnfn
cor + = O Rn est l'autocorrlation du signal xn. L'inconvnient
majeur du Corrlogramme est d'abord qu'il peut conduire l'estimation
d'une densit spectrale de puissance ngative, due videmment aux
erreurs numriques de la discrtisation, par ailleursson pouvoir de
rsolution est faible. c-Le cepstre:
L'analysecepstraleestunemthodequiaungrandchampd'applicationsurtoutdansle
diagnosticdessignauxvibratoires.Ellepeutdtecterlespriodicitsdansunspectre(spectre
d'engrenageparexemple).Onpeutdirequelestechniquescepstralessonttrsefficacespour
dtecter la prsence d'chos. Ces chos sont gnralement espacs.
CettemthodeestdfinicommeletransformedeFourierinversedulogarithmedeladensit
spectrale de puissance : ) 6 . .......( .......... ..........
.......... .......... .......... ))........ ( (ln(1I f P F xx cep=
OxcepetPx
sontlecepstreetladensitspectraledusignalx(n).Cettemthodeesttrs
efficacedupointdevuersolutiond'untraind'harmoniquesdefrquencestrsprocheet
quidistantes. En outre, l'application du cepstre au mme signal
dengrenage permet la dtection
Les systmes d'engrenages18 du dfaut travers l'observation de
l'augmentation de l'amplitude relative du pic principal situ la
qufrance de valeur gal l'inverse de la frquence d'engrnement.
I.5.3.2. METHODES PARAMETRIQUES D'ANALYSE SPECTRALE [7, 15, 18] Ces
mthodes se ramnent la slection du modle, l'estimation de ses
paramtres et la substitution des valeurs estimes dans l'expression
thorique de la densit spectrale.Il existe principalement trois
grandes classes de modles: a-Estimateur ARMA : Souvent les
processus alatoires sont modliss par un processus dit ARMA , o l'on
suppose lasrietemporellexn
gnreparl'excitationd'unfiltrelinaireinvariantparunbruitblancen fig
(I.9). e (n)Modlex(n) Fig I.9 : modle paramtrique ) 7 . ..(
.......... .......... .......... .......... ..........0 1I e b x a
xqll n lpii n i n === +
Ob0=1etenestunbruitblanccentr,etdevariance2.Cemodleestditautorgressif
moyenneajuste(ARMA),souventnotARMA(p,q),opetqsontrespectivementlesordres
desmodlesARetMA.xn
estdonclasortiedufiltredontlatransformeenzdelarponse impulsionnelle
est: ) 8 . ...( .......... .......... .......... ..........
.......... .......... .......... ..........) () () ( Iz Az Bz H = O
=+ =piiiz a z A11 ) (et lqllz b z B==0) ( . On dduit de l'quation
(I.8) l'expression de la densit spectrale de puissance dexn : ( )(
)) 9 . ......( .......... .......... .......... ..........2 exp 12
exp 1) (2121 2It f i j at f l j bt f ppiiqllARMA + + === Les
systmes d'engrenages19 O t est la priode d'chantillonnage.
L'estimation de la densit spectrale de puissance de xn
ncessitel'estimation des paramtres ai, bi et 2.Ce modle est
adapt n'importe quel type de signaux. b-Modle MA:
Enannulantlesai,onobtientlemodlemoyenneajuste,ouARMA(0,q)plusconnusous
l'abrviation MA (q): ) 10 . .........( .......... ..........
.......... .......... .......... ..........0I b xqll n l n == Il
vient par l'quation (I.9) que la densit spectrale de puissance de
xn s'exprime par la relation suivante: ) 11 . ....( ..........
.......... .......... .......... .......... 1 ) (212 2I e b t f
pqlt jlll MA = + = Ce modle est bien adapt aux signaux dont la
puissance est nulle dans certaines bandes de frquences. c-Modle AR
:
Engnralenmettantlesbl(l>0)zro,onaboutitdonclamodlisationautorgressive
note ARMA (p, 0) ou plus communment AR (p) : ) 12 . ....(
.......... .......... .......... .......... .......... ..........1I
x a xnpii n i n = += De mme, il dcoule de l'quation (I.9) que la
densit spectrale du modle autorgressif est : ( )) 13 . ...(
.......... .......... .......... .......... ..........2 exp 1)
(212It f i j atf ppiiAR +== Ce modle est bien adapt aux signaux
composs de raies pures dans du bruit blanc. Les systmes
d'engrenages20 I.5.3.3. METHODES DE DECOMPOSITION HARMONIQUE [7,
15, 18] Cette mthode suppose que le signal est compos d'un certain
nombre de raies spectrales dont il convient de trouver les
frquences et les puissances CONCLUSION
Lasurveillanceetlediagnosticdesfatiguesetdesendommagementsdanslesstructures
mcaniquesetlesmachinestournantesestundomained'intrtgrandissantdansplusieurs
secteurs industriels. L'analyse spectrale est l'outil majeur pour
l'tude des signaux vibratoires des
machinestournantes,danslecadredelamaintenancediteprventiveconditionnelledes
machines. Bon nombre de problmes lis la dtection de dfauts sur les
organes des machines peuvent tre rsolus par les techniques
classiques fondes sur l'analyse de Fourier. Nanmoins, il
existedescasol'analysespectraleauxcasdessignauxcomportantdesnonstationnarits
locales(casd'engrenageparexemple),latransformedeFouriern'estpasadaptedetelles
situationscarilestdifficiledemettreenvidencelesnonstationnaritslocalesquisont
gnralement brves sur ce type de signaux.
Danslechapitresuivant,nousallonsmontrerquel'utilisationdestechniquesd'analyse
spectraleparlesmthodesdedcompositionharmoniquepermetd'offrirdesmeilleures
performances que les techniques classiques fondes sur l'analyse de
Fourier. L'estimation spectrale par les mthodes de dcompositions
harmoniques22CHAPITRE II L'ESTIMATION SPECTRALE PAR LES METHODES DE
DECOMPOSITION HARMONIQUE
INTRODUCTION
Certainssignauxrencontrssurdesprocessusindustrielsnepeuventpastre
analyssaveclesoutilsclassiquesdetraitementdusignalsoit,parcequela
transformedeFouriers'avretreinadapte,soitparcequeleshypothsesde
stationnaritetd'ergodicitnesontpasvalables.Pourcesraisons,desmthodes
particuliresontfaitl'objetdedveloppementsspcifiquespourrsoudreles
problmes des machines tournantes.
Cechapitreprsentelesprincipalestechniquesdedcompositionharmoniques:
Les mthodesde Prony et de Pisarenko. II.1. ESTIMATEURS
D'HARMONIQUES [15] De nombreux processus physiques engendrent des
signaux harmoniques. Un signal
harmoniqueestunesommedesinusodesdontlesfrquencessontdesmultiplesentiersdelafrquencefondamentale.Atitredexemples,onpeutcitertrois
L'estimation spectrale par les mthodes de dcompositions
harmoniques23problmes, non exhaustifs, pour lesquels la
connaissance des paramtres caractrisant les signaux harmoniques est
trs utile :
Lepremierestladtectiondedfautsdansunprocessusindustrielvuetravers
certainssignaux.Ainsi,parexemple,lesuividelvolutiondescaractristiques
descourants(amplitudes,frquences)issusdunemachinetournantepermetde
dtecterlapparitiondedfauts,lorsqueceux-cisetraduisentparlamodification
de composantes harmoniques.
Ledeuximeestlaclassificationdesignauxendiffrentesclasses.Uneclasse
se caractriseparlesparamtresdemodlisationdessignauxharmoniquesqui
doivent tre estims. On trouve des applications importantes dans la
classification de signaux de parole et de musique.
Danslecontrledecertainsprocessusphysiques,lestimateurdesignaux
harmoniques, qui peut tre insr dans une boucle de rgulation permet
dadapter les gains de commande certains paramtres des composantes
harmoniques. En prsence des signaux composs d'une somme de
fonctions sinusodales pures
oudefonctionsexponentiellesmodulespardesfonctionstrigonomtriques,ilest
particulirementintressantd'identifierchacunedescomposantes.Lesmthodesde
modlisationdePronyetdePisarenkorpondentprcismentsesobjectifsetsont
desauxiliairesprcieuxdansledomainedelamcaniqueenanalysemodale
exprimentale pour l'tude des vibrations. II.2.METHODE DE PRONY [7,
15, 19, 20, 21, 22]
Cettemthode,remontant1795,connatunregaind'intrtd'unepartgrce
l'volution des moyens de calculs et d'autre part grce ses capacits
rsoudredes problmesdans les domaines o les mthodes classiques sont
inefficaces. Dans cette
mthode,lesignalx(n)estsuppostreconstitud'unesommedePexponentiellesamorties.
L'hypothse de dpart s'crit donc: ==pknk kII Z b n x1) 1 . ......(
.......... .......... .......... .......... .......... ) (
L'estimation spectrale par les mthodes de dcompositions
harmoniques24Dans ce modle, les exponentielles {Zk} (notes ples du
modle) sont porteuses de quatre types d'informations familires en
traitement du signal et en modlisation de systmes : ) 2 . ......(
.......... .......... .......... .......... ..........) 2 (II e Zt
f jkk k += ) 3 . .( .......... .......... .......... ..........
.......... ..........) (II e A bkjk k=Avec Ak : l'amplitude k : la
phase en radians. k : le facteur d'amortissement. fk : la frquence
d'oscillation en HZ. t reprsente le pas d'chantillonnage en seconde
On peut alors exprimerle polynme : === = =pii pipkkII a avec Z a Z
Z Z001) 4 . .......( .......... 1.......... .......... ) ( ) (
D'aprs l'hypothse de dpart sur x (n) on a : ) 5 . .....( ..........
l - N i - n 0 ........ .......... .......... .......... 1II Z b
xpli nl l i n = =
En multipliant cette quation par ai et en effectuant une
sommation sur m, il vient : ) 6 . ....( .......... pour ........
.......... ) ( 0 1 0II l N n p Z a b i n x am nlpmmpllpii = = = =
Ou encore: Or00==i plpiiZ apar dfinition des coefficients ai du
polynme (Z) dont les racines sont les Zl, d'o : ) 7 . ..(
.......... .......... .......... .......... .......... 0 1 0II Z a
Z b x ai plpiip nlpll i npii=== =L'estimation spectrale par les
mthodes de dcompositions harmoniques25) 8 . ........( ..........
.......... .......... .......... .......... 0 0II x ai npii== D'o:
) 9 . .......( .......... .......... .......... ..........
.......... 1II x a xi npii n = =Les coefficientsai peuvent donc tre
obtenus par la rsolution du systme linaire de dimension N suivant :
) 10 . ....( .......... .......... ............) (.) 2 () 1
()......... 2 (.)..... 1 ()......... () 2 (..) 1 (1IIaaN xxxN xN xN
xN xN xN(((((
(((((
+=(((((
+ A partir des N coefficients ai il est possible de former le
polynme : ) 11 . .( .......... .......... .......... ..........
.......... ) (0II Z a Zl npii== Avec a0=1 Et d'en extraire les
pracines complexes. Les modules de ces racines donnent alors
lesaffaiblissementsm
tandisquelesphasesdonnentlesfrquencesfm.Unefois
qu'onadterminpartirdupolynme(II.4)lesZi,l'quation(II.1)peuts'exprimer
souslaformed'unsystmed'quationslinairesdontlesinconnuessontles
paramtres bi B= x ... (II.12) Avec = ) 13 . ...( ..........
.......... .......... .......................1 . 1 122112 1IIZ Z ZZ
Z Zp NpN Np(((((((((
L'estimation spectrale par les mthodes de dcompositions
harmoniques26[ ] ) 14 . ..( .......... .......... ..........
.......... .......... . .3 2 1II b b b b BTp= [ ] ) 15 . .........(
.......... .......... .......... .......... . . 1 2 1 0II x x x x
XN =La matrice est une matrice Vander Mande. La minimisation de 2)
( x xpar les moindres carrs donne la solutionsuivante: [ ] ) 16 .
..( .......... .......... .......... .......... ..........1II X BH
H = Pour calculer H, on a: 11 ) (*=j iNj iijZ ZZ ZV ...(II.17)
D'o:) 18 . ......( .......... .......... .......... ...........
............ .. .2 12 22 211 12 11IIV V VV V VV V Vpp p
pppH(((((((
= Aprs avoir dtermin Zi et bi, on peut calculer l'amplitude Ai,
la phase k, le facteur d'amortissementk et la frquence fi : [ ][ ]
) 22 . ....( .......... .......... .......... .......... 2 / ) Re(
/ ) Im() 21 . ..( .......... .......... .......... ..........
.......... .......... .......... / ln) 20 . ......( ..........
.......... .......... .......... .......... ) Re( / ) Im() 19 . .(
.......... .......... .......... .......... .......... ..........
.......... ..........11II t Z Z tg fII t Z aII b b tgII b Ai i ii
ii i ii i = === Alors la fonction d'approximation devient: ) 23 .
.......( .......... )]........ 2 ( exp[ ) exp( ) (1II t m f j t m A
n Xm mpmm m + = = L'estimation spectrale par les mthodes de
dcompositions harmoniques27Finalement, on obtient d'aprs la
transforme de Fourier X(f) de x(n), la densit spectrale de
puissance de Prony: = +==pmm mmm monyIIf fj A f XII f X f S12 22Pr)
25 . .( .......... ..........)] ( 2 [2) exp( ) () 24 . ( ..........
.......... .......... .......... .......... .......... ) () (
II.3.METHODE DE PISARENKO [7, 15, 18, 23] Dans cette mthode, on
suppose que le signal x (n) est constitu d'une somme de N
sinusodess (n) et d'un bruit blanc additif e (n) : ) 26 . (
.......... .......... .......... .......... .......... )......... (
) ( ) ( II n e n s n x + = Sachant que toute sinusode pure sin (nw)
peut s'crire sous la forme: Sin (nw) =2 cos wsin (n-1) w- sin (n-2)
w. Alors il est possible d'crire: = =NmmII m n s a n s21) 27 . (
.......... .......... .......... .......... )......... ( ) (D'o
:
=+ =NmmII n e m n s a n x21) 28 . .( .......... ..........
.......... )......... ( ) ( ) ( En remplaant s(n-m) par) ( ) ( m n
e m n x , il vient : ) 29 . ......( .......... ..........
.......... ) ( ) (2020II m n e a m n x aNmmNmm = = = Ce qui peut
s'crire sous forme matricielle : L'estimation spectrale par les
mthodes de dcompositions harmoniques28) 30 . ......( ..........
.......... .......... .......... .......... ) ( ) ( II A n A n XT T
=Avec : T TT TN n e n e n e nN n x n x n x n X)] 2 ( .....,
),........ 1 ( ), ( [ ) ()] 2 ( .., ),........ 1 ( ), ( [ ) ( = =
Et D' o: ) 32 . ( .......... .......... .......... ..........
.......... .......... ) ( )) ( ) ( () 31 . ........( .......... ) (
)) ( ) ( ( ) ( ) ( ) ( ) (1 2II A n n n s E A RII A n n n s E A n n
X E A n X n X ETNT T T + =+ = =+
Or,onsupposantquelebruitestblanc,devariance2 etdcorrldumlangede
sinusodes; cette quation devient donc: ) 33 . .........( ..........
.......... .......... .......... ..........2 21 2II A IA A RN = =+
LevecteurAestdonclevecteurpropreassocilavaleurpropre2 avecla
contraintea0 =1 . Ayant le vecteur A, on peut crire la transforme
en Z de l'quation: ) 34 . ......( .......... .......... ..........
.......... .......... 0 1 ) () ( ) (2121II Z a Z Sm n s a n
sNmmmNmm=|||||
\| ===
((((((((
=NaaaA210...L'estimation spectrale par les mthodes de
dcompositions harmoniques29 Les valeurs de Z pour lesquelles cette
quation est vrifie donnent les valeurs des
frquencesprsentesdanslemlange.Ilfautextrairelesracinesdupolynme
=NmmmZ a211pour obtenir les N valeurs des frquences. Si Net 2 ne
sont pas connus a priori, il suffit de surdimensionner la matrice R
et d'analysersesvaleurspropres.Thoriquementcellesci doivent, au
bout de N ordres,
atteindreunevaleurconstantegale2.Ilexistedenombreuxcritresqui
permettent de dtecter ce blocage 2 des valeurs propres. Enfin, il
est possible d'obtenir les puissances des sinusodes dtectes. En
effet, il est facile de vrifier que, dans le cas d'un mlange de N
sinusodes de pulsation i et de puissancePi, on a : ) 35 . .......(
.......... .......... .......... cos .. .......... cos cos )
(.......... .......... .......... ........... 2 cos .....
.......... 2 cos 2 cos ) 2 (cos ......... .......... cos cos ) 1 (2
2 1 12 2 1 12 2 1 1II Nw P Nw P Nw P N rw P w P w P rw P w P w P rN
NN NN N+ + + =+ + + =+ + + =
Disposantdespulsationsi
etdescoefficientsd'autocorrlationr(i),ilsuffitde
rsoudrecesystmepourtrouverlespuissancesrespectivesPidesraiesspectrales
identifies. En conclusion pour analyser un signal selon la mthode
de Pisarenko, il faut: Observer N valeurs du signalx (nTe).
Calculerlamatriced'autocorrlationetenfaireladcompositionenlments
propres. Dtecter 2 et en dduire le nombre de sinusodes. Extraire
les racines d'un polynme complexe de degr 2N.
Enfinsionveutlespuissances,rsoudreunsystmereldeNquationsN
inconnues. L'estimation spectrale par les mthodes de dcompositions
harmoniques30
Ladcompositionenlmentspropresrestepourl'instantl'tapelaplusdlicate
raliser de manire rapide et c'est le frein principal l'emploi de
cette mthode.
II.4.DETERMINATIONDE L'ORDRE [7, 15, 21]
Ilestncessaire,enpratique,depostulerplusieursordresetdechoisirl'ordrequi
sembleleplusappropri.Aceteffet,diffrentscritresfondssurl'erreurde
prdiction sont valus pour indiquer quelest l'ordre du modle
choisir.L'exprience montre que si le processus originalest un
processusd'ordre p,
alorslechoixd'unmodled'ordreinfrieurpentraneuneestimespectralelisse.En
fait,toutordrefiniintroduitunbiaisdul'inadquationdelamodlisation.Un
compromis doit donc tre ralis entre le dsir de choisir un ordrelev
pour rduire le biais et un ordre faible pour rduireles erreurs
d'estimation. Diffrentes mesures visant dterminer l'ordre du modle
ont t proposes; elles
sontfondessurlapuissancedel'erreurd'estimation.Gnralement,ellestententde
choisirunordrequiminimiselapuissancedel'erreurdeprdictionmaisenmme
temps un ordre aussi faible que possible.
Ilestdoncraisonnablequelapuissancedel'erreurdeprdictionsoitl'indicateur
centralpourlaslectiondel'ordredumodle.Deuxmthodesonttproposespar
AKAIKE pour le choix de l'ordre optimal.
Lapremiremthode,connuesousl'appellationdecritreFPE(Erreurde
Prdiction Finale), estime l'ordre du modle qui minimise: ) 36 . .(
.......... .......... .......... .......... .......... ..........
..........11IIp Np NE FPEp|||
\| + +=L'estimation spectrale par les mthodes de dcompositions
harmoniques31
ONestlenombred'chantillons,pestchoisidetellefaonqueFPEsoit
minimum.La seconde mthode, de loin la plus utilise, est base sur la
minimisation d'une fonction d'information, note AIC (Akaike
information criterion) et donne par ) 37 . ( .......... ..........
.......... .......... .......... .......... 2 ) ln( ) ( II p E N p
AICp+ =
Pourdesenregistrementslongs,AICestleplusconvenable;maispourdes
enregistrements courts, les critres de Akaike sont identiques.
Cette mthode n'est pas limite AR mais aussi ARMA et MA. II.5.
SIMULATION
Afindetesterl'efficacitetlesperformancesdesmodlesPronyetPisarenkoet
avantdepasserlesappliqueraudiagnosticd'engrenage,nousprocdonsles
simulerenutilisantdesfichiersdedonnesgnrespartirdesprocessus
paramtriquesd'ordreetdecoefficientsconnus[19].Lesparamtresprendreen
considration pour la simulation sont: Le nombre d'chantillons du
signal simul. Le niveau de bruit (ou le rapport signal sur bruit).
II.5.1 PROGRAMME DE SIMULATION
Leprogrammequenousavonsimplantsurunmicro-ordinateurcompatiblePC
estdveloppsousl'environnementdulogicielMatlab6,quipermetl'tudeet
l'analysedesignauxstationnairesetnonstationnairesetsesobjectifssontorients
vers l'analyse spectrale moderne: Les mthodes de dcomposition
harmoniques Prony et Pisarenko. Ce programme est prsent selon
l'organigramme de la figure (II.1) L'estimation spectrale par les
mthodes de dcompositions harmoniques32 Fig II.1 : gnration du
signal de test DbutChoix du signal de testSignal sinusodal Signal
paramtriqueLecture du nombre d'chantillons Signal paramtrique
transitoireLecture des valeurs initialesLecture des
amplitudesLecture des frquencesLecture desdphasagesLecture de la
frquence d'chantillonnageLecture du nombre d'chantillonsGnration du
signal sous forme sinusodaleGnration du signal partir du modle
paramtriqueTracer le signal dans le domaine temporelSauvegarder les
valeurs du signalL'estimation spectrale par les mthodes de
dcompositions harmoniques33 Fig (II.2): Gnration de la DSP du
signal test Gnration du signal de test Fig (II.1)Lecture de la
frquence d'chantillonnage et du nombre d'chantillons (Fe,
Ne)Bruiter le signal de testChoix de la mthode de testProny
PisarenkoCalcul de la DSPTracer le spectre de
puissanceFinDbutL'estimation spectrale par les mthodes de
dcompositions harmoniques34 II.5.2.DEFINITION DU RAPPORT SIGNAL SUR
BRUIT [15]
Le bruit (SNR=Signal to Noise Ratio) utilis dans tous nos tests
est un bruit blanc gaussien de variance (Ab)2: ) 38 . .( ..........
.......... .......... .......... .......... * ) ( II r Ab i edd= O
rdd est un bruit blanc, gaussien, et identiquement distribu, de
moyenne nulle et de
variancegalel'unit,gnrparMATLAB.Cebruitseraadditionnunsignal y(i).
Le rapport signal sur bruit est donc dfini par: ) 39 . ....(
.......... .......... .......... .......... ..........) () (log
101212IIi ei ySNRnini(((((
=== II.5.3.SIGNAUX SIMULES II.5.3.1. SIGNAL MODELE 1: Somme de
deux sinusodes bruites
Lepremiermodleestunsignalpriodiquecomposdedeuxsinusodesdemme
amplitude et de frquences f1 =200et f2 =210Hz et d'un bruit blanc
additif
Y(i)=sin(2200t)+sin(2210t)+e(t)...........................................(II.40)
Avect=0,1,....,Nsec(N=nombred'chantillons),unpasd'chantillonnagedt=1/fe
(fe:frquenced'chantillonnage).L'obtentionduprocessusdiscretsefaiten
remplaant t par (1/fe)(i) :
Y(i)=sin(2(0.200).i)+sin(2(0.210).i)+e(i)...(II.41) Les ples de ce
processus sont Z1=1.0273 exp (j2(0.1211)) ; Z2=Z1*. L'estimation
spectrale par les mthodes de dcompositions harmoniques35Z3=0.9487
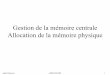
exp (j2(0.039)) ;Z4= Z3*. 0 50 100 150 200 250
300-2-1.5-1-0.500.511.52Signal y(i)somme de deux sinusoidesy(i)
FigII.3 : Reprsentation temporelle du signal modle 1
II.5.3.2.SIGNAL MODELE 2: un processus transitoire d'ordre quatre
C'estunsignalapriodique,transitoireetharmoniquequiseprsentesousforme
debattements(causspardeuxfrquenceslgrementdiffrentesaveclafrquence
des battements gale F=F1-F2. Y(i)=
2.7607y(i-1)-3.816y(i-2)+2.6535y(i-3)-0.9238y(i-4)+e(i)..(II.42)
Les ples de ce processus sont: Z1=0.98exp (j2 (0.140)) ;Z2=Z1*
Z3=0.98exp (j2 (0.110)) ;Z4=Z3*. 0 50 100 150 200 250 300 350 400
450 500-40-30-20-1001020304050Signal y(i)signal transitoire d ordre
4y(i) L'estimation spectrale par les mthodes de dcompositions
harmoniques36Fig II.4 : Reprsentation temporelle du signal modle 2
II.6. RESULTATS ET INTERPRETATIONS II.6.1. MODELE DE PRONY
II.6.1.2. SIGNAL MODELE 1
0 50 100 150 200 250 300-160-140-120-100-80-60-40-2002040DSP
Pronyfrequence[HZ]Amplitude relative a.N=500, SNR=inf,
Fe=1000b.N=300, SNR=inf, Fe=1000 0 50 100 150 200 250
300-90-80-70-60-50-40-30-20DSP Pronyfrequence[HZ]Amplitude
relative
N=300, SNR=45, Fe=1000d. c.N=500, SNR=45, Fe=1000
0 50 100 150 200 250 300-80-75-70-65-60-55-50-45-40-35-30DSP
Pronyfrequence[HZ]Amplitude relative e.N=500, SNR=37,
Fe=1000f.N=300, SNR=37, Fe=1000 0 50 100 150 200 250 300 350 400
450 500-90-80-70-60-50-40-30-20DSP Pronyfrequence[HZ]Amplitude
relative0 50 100 150 200 250 300 350 400 450
500-75-70-65-60-55-50-45-40-35-30DSP Pronyfrequence[HZ]Amplitude
relative0 50 100 150 200 250 300 350 400 450
500-200-150-100-50050DSP Pronyfrequence[HZ]Amplitude
relativeL'estimation spectrale par les mthodes de dcompositions
harmoniques37
0 50 100 150 200 250 300-75-70-65-60-55-50-45-40-35-30-25DSP
Pronyfrequence[HZ]Amplitude relative
g.N=500, SNR=35, Fe=1000 h.N=300, SNR=35, Fe=1000
0 50 100 150 200 250 300-70-65-60-55-50-45-40-35-30-25DSP
Pronyfrequence[HZ]Amplitude relative
i.N=500, SNR=15, Fe=1000 j.N=300, SNR=15, Fe=1000
k. N=500, SNR=inf, Fe=1000l. N=500, SNR=inf, Fe=1000F1=200,
F2=205 F1=200, F2=203
Fig II.5 : Spectre de puissance obtenu par la mthode de Prony
pour un processus somme de deux sinusodes bruites 0 50 100 150 200
250 300 350 400 450 500-90-80-70-60-50-40-30-20DSP
Pronyfrequence[HZ]Amplitude relative0 50 100 150 200 250 300 350
400 450 500-75-70-65-60-55-50-45-40-35-30DSP
Pronyfrequence[HZ]Amplitude relative0 50 100 150 200 250 300 350
400 450 500-110-100-90-80-70-60-50-40-30-20-10DSP
Pronyfrequence[HZ]Amplitude relative0 50 100 150 200 250 300 350
400 450 500-120-100-80-60-40-200DSP Pronyfrequence[HZ]Amplitude
relativeL'estimation spectrale par les mthodes de dcompositions
harmoniques38 II.6.1.3. SIGNAL MODELE 2 0 50 100 150 200 250 300
350 400 450 500-3.5-3-2.5-2-1.5-1DSP Pronyfrequence[HZ]Amplitude
relative a.N=500,Fe=1000,SNR=infb.N=500,Fe=1000,SNR=45 Fig II.6 :
Spectre de puissance obtenu par la mthode de Prony pour un
processus d'ordre quatre bruit ModleFigureFeNeF1F2SNRDtection
1II.5.(c)100050020024045Oui 1II.5.(d)100030020024045Oui
1II.5.(e)100050020024037Oui 1II.5.(f)100030020024037Oui
1II.5.(g)100050020024035limit 1II.5.(h)100030020024035Non
1II.5.(i)100050020024015Non 1II.5.(j)100030020024015Non
1II.5.(k)1000500200205Infoui 1II.5.(l)1000500200203infNon
2II.6.(a)1000500110140InfOui 2II.6.(b)100050011014045oui Tableau
II.1 : Dtection frquentielle par la mthode de Prony
Lesrsultatsreprsentssurlesfigures(II.5)et(II.6)reprsententlesspectresde
puissance des signaux modles par la mthode de Prony. Ces figures
montrent que la 0 50 100 150 200 250 300 350 400 450
500-40-35-30-25-20-15-10-505L'estimation spectrale par les mthodes
de dcompositions harmoniques39technique de Prony permet de
discerner lesfrquences F1 et F2malgr leurs valeurs
proches(F1=200,F2=240)etenprsenced'unrapportsignalsurbruitsatisfaisant
(>35DB), alors qu'elles ne sont pas discernes dans les deux cas
suivants : Les valeurs des deux frquences sont trs proches (F1=200,
F2=203) Fig (II.6). Le rapport signal sur bruit est satisfaisant
(