Embed Size (px)
Citation preview
Méthodes topographiques de suivi de glissements de terrain
Exemple de la Montagne de Reims Région Champagne-Ardenne
Rapport final
BRGM/RP 54688-FR Décembre 2005
Méthodes topographiques de suivi de glissements de terrain
Exemple de la Montagne de Reims Région Champagne-Ardenne
Rapport final
BRGM/RP 54688-FR Décembre 2005
Étude réalisée dans le cadre des projets de recherche BRGM 2004
T. Dewez Avec la collaboration de
L. Closset, F. Simon, A. Marre, D. Idier et C. Delacourt
Vérificateur : Nom :Jean-Louis Nédellec
Date :04/05/2006
Signature :
Approbateur : Nom : Michel Aguillaume (SAR/LOR)
Date : 05/06/2006
Signature :
Le système de management de la qualité du BRGM est certifié AFAQ ISO 9001:2000.I
M 003 - AVRIL 05
Mots clés : Glissement de terrain, méthode de suivi topographique, Champagne, Montagne de Reims, Boursault, Champillon, scanner laser, GPS, photogrammétrie En bibliographie, ce rapport sera cité de la façon suivante :
Dewez T., Closset L., Simon F., Marre A., Idier D. et Delacourt C. (2005), Méthodes topograhiques pour le suivi de glissements de terrain en Champagne. BRGM/RP-54688-FR, 116 p., 55 fig., 10 tabl., 2 ann. © BRGM, 2005, ce document ne peut être reproduit en totalité ou en partie sans l’autorisation expresse du BRGM.
Comparaisons des techniques topographiques de suivi de glissement de terrain
BRGM/RP-54688-FR – Rapport final 3
Synthèse
Les versants de la Montagne de Reims, en région Champagne-Ardenne, sont soumis à un aléa de glissement de terrain non négligeable. A la suite d'un glissement réactivé sur la commune de Boursault en Champagne en 2000, le BRGM, en association avec l’Université de Reims, a proposé un programme mettant en œuvre quatre techniques topographiques permettant de mesurer la déformation verticale du sol induite par les glissements de terrain. Du fait de l’utilisation agricole (vignobles), ces techniques ont été adaptées pour limiter la mise en place de points de repère permanent sur les sites investigués.
Les trois techniques finalement employées sont le levé avec une paire d'antennes GPS en mode différentiel cinématique temps réel, le levé avec un scanner laser et le levé photogrammétrique par photos aériennes numériques à basse altitude. Ces techniques ont concerné les sites de deux localités, Boursault et Champillon dans la région d’Epernay, où des glissements de terrain étaient reconnus. Les mesures ont eu lieu sous forme de trois campagnes entre mars 2004 et décembre 2005.
Cette étude comparative vise à caractériser les limites des trois techniques en termes de 1) résolution spatiale; 2) résolution temporelle; 3) seuil de détection des mouvements; 4) moyens matériels à mettre en œuvre et 5) de ressources.
La précision verticale intrinsèque des mesures GPS est de l’ordre de 5 cm, celle du laser d’environ 2 cm et celle de la photogrammétrie basse altitude, de plus ou moins 30 cm.
La mesure de l’évolution des glissements de terrain a été réalisée avec deux techniques d’interpolation : l’interpolation linéaire et le krigeage. L’interpolation linéaire donne une estimation qualitative des changements d’altitude dans le glissement. L’interpolation par krigeage, initialement choisie parce qu’elle est particulièrement bien adaptée pour évaluer les incertitudes de l’interpolation, n’a pas été complètement appliquée du fait de la structure des terrains viticoles. Les murets de soutènements parcourant les vignes induisent des discontinuités locales qui biaisent les estimations du krigeage. Des tests réalisés sur des parcelles sans muret ont cependant révélé que la précision des levés GPS permettaient de détecter des déplacements verticaux supérieurs à 5-10 cm avec fiabilité.
A Boursault, les mouvements détectés pendant la période investiguée sont résiduels et sont principalement circonscrits au bourrelet frontal. A Champillon, des déplacements verticaux ont également été identifiés par endroit mais ne semblent pas présenter de structures caractérisant les mouvements de glissement en masse.
Pour ce qui concerne la comparaison des techniques, les levés par GPS sont relativement simples à organiser, à réaliser et à traiter (pour autant que les ruptures de pentes soient clairement identifiées au moment du levé). Par contre, ils ne peuvent
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
4 BRGM/RP-54688-FR – Rapport final
s’appliquer qu’à des étendues de quelques hectares au maximum vu la faible productivité de la technique. Le scanner laser a produit rapidement des nuages de plusieurs millions de points avec une précision centimétrique. Mais cet avantage est tempéré par la lourdeur des post-traitements visant à identifier les points ayant réellement atteint le sol. Par ailleurs, l’usage du laser n’est vraiment efficace que lorsqu’il n’y a pas de végétation sur le sol. Enfin, la photogrammétrie basse altitude permet de couvrir de plus grandes étendues au prix d’une précision moindre. Le déploiement est relativement simple mais les conditions météorologiques permettant de voler on été trop limitées pour avoir une bonne appréciation de cette technique.
En conclusion, aucune technique ne surpasse les autres : elles ont toutes des avantages qu'il faut peser en fonction de la taille du terrain, du taux de déplacement du mouvement de terrain, des ressources disponibles pour réaliser le levé et traiter les données et des infrastructures disponibles. Il faut noter que la technique du laser est pour l’instant moins aboutie et n’est pas encore utilisable en routine.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 5
Sommaire
1. Introduction.............................................................................................................15
1.1. CONTEXTE .......................................................................................................15
1.2. SITES PRESELECTIONNES ............................................................................16
1.3. TECHNIQUES TOPOGRAPHIQUES ................................................................16
1.4. CONTENU DU RAPPORT.................................................................................18
2. Position du problème .............................................................................................19
2.1. LOCALISATION DES SITES EXPERIMENTAUX .............................................20 2.1.1. Boursault ..................................................................................................20 2.1.2. Champillon................................................................................................21 2.1.3. Autres sites expérimentaux envisagés .....................................................22
2.2. TECHNIQUES DE MESURE TOPOGRAPHIQUES..........................................23 2.2.1. D-GPS ......................................................................................................23 2.2.2. Scanner laser ...........................................................................................23 2.2.3. Photos aériennes à basse altitude ...........................................................25
2.3. CALENDRIER D'ACQUISITION DES MESURES.............................................27
3. Modes opératoires..................................................................................................28
3.1. D-GPS ...............................................................................................................28 3.1.1. Préparation ...............................................................................................28 3.1.2. Référence de Boursault............................................................................28 3.1.3. Référence de Champillon .........................................................................29 3.1.4. Stratégies de levé.....................................................................................30
3.2. SCANNER LASER.............................................................................................31 3.2.1. Installation et mesure de cibles ................................................................31 3.2.2. Mise en station du scanner.......................................................................33 3.2.3. Calcul de la position du scanner...............................................................34 3.2.4. Mesure du panorama ...............................................................................35 3.2.5. Photographies numériques.......................................................................36 3.2.6. Détermination de la localisation de la station suivante.............................38
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
6 BRGM/RP-54688-FR – Rapport final
3.3. PHOTOGRAMMETRIE BASSE ALTITUDE...................................................... 38 3.3.1. Conditions de vol...................................................................................... 38 3.3.2. Décollage et vol du drône et de l'hélicoptère ........................................... 38 3.3.3. Mesure de points de calage ..................................................................... 40
4. Principe de spatialisation et de comparaison des données multi-temporelles43
4.1. CARACTERISATION DE LA VARIABILITE SPATIALE.................................... 44
4.2. AJUSTEMENT D'UNE FONCTION ANALYTIQUE AU VARIOGRAMME......... 45
4.3. ESTIMATION DES ALTITUDES ....................................................................... 45
4.4. ESTIMATION DES INCERTITUDES ................................................................ 46 4.4.1. Ecart-type de krigeage ............................................................................. 46 4.4.2. Validation croisée..................................................................................... 46
4.5. COMPARAISON MULTI-TEMPORELLE .......................................................... 46
4.6. LIMITATIONS DU KRIGEAGE.......................................................................... 46
4.7. CONCLUSION .................................................................................................. 47
5. Résultats du D-GPS ............................................................................................... 49
5.1. METHODOLOGIE ............................................................................................. 49
5.2. BOURSAULT .................................................................................................... 50 5.2.1. Exploration des données brutes............................................................... 50 5.2.2. Variabilité spatiale .................................................................................... 54 5.2.3. Comparaison temporelle .......................................................................... 56
5.3. CHAMPILLON ................................................................................................... 63 5.3.1. Exploration des données brutes............................................................... 63 5.3.2. Variabilité spatiale .................................................................................... 67 5.3.3. Comparaison temporelle .......................................................................... 67
5.4. CONCLUSIONS ET PERSPECTIVES.............................................................. 70
6. Résultats du scanner laser.................................................................................... 73
6.1. ALGORITHME DE DECIMATION DES DONNEES.......................................... 73 6.1.1. Décimation dans RieglScan ..................................................................... 74 6.1.2. Principe de décimation par surface basale .............................................. 74 6.1.3. Application aux n scans d'un site ............................................................. 75
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 7
6.2. CHAMPILLON ...................................................................................................75 6.2.1. Résultats...................................................................................................75 6.2.2. Comparaison avec données GPS ............................................................77 6.2.3. Comparaison temporelle ..........................................................................81
6.3. CONCLUSIONS ET PERSPECTIVES ..............................................................81
7. Résultats photogrammétriques.............................................................................83
7.1. METHODOLOGIE..............................................................................................83
7.2. ORIENTATION DES PRISES DE VUE .............................................................84
7.3. PHOTOS AERIENNES......................................................................................84
7.4. EXTRACTION DE MNT.....................................................................................88
7.5. PRODUCTION D'ORTHOPHOTOGRAPHIES ..................................................89
7.6. CORRELATION D'ORTHOPHOTOGRAPHIES ................................................90
7.7. COMPARAISON TEMPORELLE DE MNT........................................................93
7.8. COMPARAISON DE PHOTOS TERRESTRES.................................................94
7.9. CONCLUSIONS ET RECOMMENDATIONS.....................................................96
8. Conclusions et recommendations ........................................................................99
8.1. MOUVEMENTS OBSERVES SUR BOURSAULT.............................................99
8.2. MOUVEMENTS OBSERVES SUR CHAMPILLON ...........................................99
8.3. LEVES D-GPS.................................................................................................100
8.4. LEVES AU SCANNER LASER........................................................................101
8.5. LEVE PHOTOGRAMMETRIQUE A BASSE ALTITUDE .................................101
8.6. COMPARAISON DES TECHNIQUES.............................................................102
9. Bibliographie.........................................................................................................105
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
8 BRGM/RP-54688-FR – Rapport final
Liste des illustrations
Figure 1: Localisation des glissements de terrain de Boursault et Champillon. Les glissements, (polygones jaunes) sont localisés sur les versants de la Marne, dans la proche région d'Epernay (département de la Marne) [fond cartographique au 1/250.000 de l'IGN]. ...................................................................................................................................... 20 Figure 2: Vue annotée (en direction du SW) du glissement de terrain de Boursault, dans le département de la Marne. La zone du glissement initiée en 2000 est délimitée par les pointillés jaunes. Des niches d'arrachement plus anciennes mais non datées sont détectables à la limite du plateau (pointillés bruns). Le point rouge figure la position approximative du repère local par rapport auquel les levés GPS ont été réalisés. Les traits rouge, bleu clair et bleu moyen figurent le réseau routier. (Figure basée sur GoogleEarth v3.0.0548 beta visité le 30 novembre 2005). ........................................ 21 Figure 3: Vue oblique (vers le NE) du glissement de terrain de Champillon. La partie investiguée (en pointillés jaunes) est à l'aval d'une large niche d'arrachement (pointillés bruns) entaillée dans le bord du plateau de la Montagne de Reims. .......................................... 22 Figure 4: Vue 3D plongeante d'un scan laser colorisé à Boursault. Le scanner est l'élément gris à l'intérieur du polygone pseudo-octogonal noir situé dans le coin inférieur droit de l'image. Au dessus du scanner,la large tache noire à contours irréguliers est l'ombre portée par le tas de gravas. Aucune mesure n'est disponible dans cette ombre puisque le rayon du laser a été arrêté par le tas de gravas. Par ailleurs, on voit très bien le poteau électrique ainsi que les fils traversant l'image de gauche à droite. Les couleurs de la scène sont obtenue en colorisant chaque point de mesure avec la couleur correspondant prise par l'appareil photo attaché au laser.............................................. 25 Figure 5: Réflecteur cylindrique de 5 cm de diamètre et de hauteur servant à déterminer la position géographique du scanner. Le revètement réfléchissant du cylindre réfléchit très intensément le rayon laser qui le frappe facilitant ainsi le repérage automatique des cibles dans un panorama de mesures............................................................. 32 Figure 6: Scanner laser mis en station à Champillon en décembre 2004. Le scanner et l'appareil photo (au dessus de la tourelle du scanner) sont pilotés par le PC portable installé au pied du trépied. L'alimentation électrique du système se fait à partir d'une batterie de voiture. Les caisses de transport du matériel permettent un transport sans danger d'une station à l'autre. ..................................................................................................... 34 Figure 7: Panorama 2D à Champillon vu depuis la station de la Figure 6. Panorama mesuré en avril 2005 avant la repousse des feuilles de vigne. Les niveaux de gris traduisent l'instensité du rayon laser réfléchi............................................................................... 35 Figure 8: Facteurs physiques influençant la précision d'une mesure laser. Les propriétés de rugosité de la surface produisent une réflexion spéculaire , lambertienne (uniforme dans toutes les directions) ou pseudo-lambertienne (selon les directions de réflexion). La forme de la tache de lumère varie selon la distance de réflexion (B) et l'angle d'incidence (C).................................................................................................................. 36 Figure 9: Panorama 2D colorisé à Champillon (la scène est identique à celle de la figure Figure 7) réalisable à partir des photos. L'assemblage des photos et du nuage de points scannés permet d'obtenir un rendu de scène 3D tout à fait réaliste. Par ailleurs la
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 9
combinaison du modèle de surface très détaillé du laser et de la photo peut conduire à la production d'orthophotographies de très haute qualité. ...........................................................37 Figure 10: Rendu 3D du panorama de la Figure 9. Les points de mesure du laser ont la couleur du pixel correspondant sur la photo. La position du scanner est signalée par le point rouge (au milieu de la figure à droite). ................................................................................37 Figure 11: Photos du drône au décollage (photos Image Sarl). ..................................................39 Figure 12: Photos de l'hélicoptère au décollage (photos Image Sarl). ........................................39 Figure 13: Système de pilotage du drône (figure Image Sarl) .....................................................40 Figure 14: Exemple de point de calage naturel dont la position a été mesurée par D-GPS (figure de Fabrice Simon)....................................................................................................41 Figure 15: Schéma de principe d'un variogramme montrant une courbe moyenne de comment une variable varie lorsqu'on regarde la différence entre paire d'observation de plus en plus lointaines..................................................................................................................44 Figure 16: Mur d'environ 2 m de haut dans la partie basse du mouvement de terrain de Boursault (photo ATM3D prise en avril 2005)..............................................................................47 Figure 17: Levé GPS à Boursault en mars 2004 (T0). ................................................................51 Figure 18: Levé GPS à Boursault en décembre 2004 (T1). ........................................................52 Figure 19: Levé GPS à Boursault en avril 2005 (T2)...................................................................53 Figure 20: Variogramme des altitudes de Boursault en mars 2004 (T0). Les courbes montrent la structure spatiale des altitudes. Les points sur les courbes marquent la moyenne de la variabilité d'altitude par intervalle de 10 m. La ligne pointillée (Var(ZZZZ)) marque la variance des altitudes de l'échantillon. ...................................................54 Figure 21: Variogramme des résidus d’altitude de Boursault en mars 2004 (T0) après retrait d’une dérive de degré 3. Ceci signifie que les altitudes ont été modélisée par une surface de tendance polynomiale de degré 3 et que seuls les écarts (ou résidus) entre la surface de tendance et les altitudes observées sont considérées pour le calcul du variogramme. La ligne pointillée (Var(ZZZZ)) marque la variance des altitudes de l'échantillon...................................................................................................................................55 Figure 22: Variogramme des altitudes de Boursault en mars 2004 (T0) avec dérive de degré 3. Cette figure montre la variabilité des altitudes à faible distance pour des intervalles de distance de 2 m. Le variogramme montre une inflexion à partir de 10 m de distance pour une valeur de variogramme de 1m². ................................................................56 Figure 23: Boursault, comparaison des campagnes GPS de décembre 2004 (T1) et mars 2004 (T0)t. Les grilles d'altitude ont été interpolées par interpolation linéaire à un pas de 0.5 m. Les variations d'altitude supérieures à 10cm sont cartographiées en couleur. Quelques artefacts d'interpolation typiques sont visibles par leur texture en triangle..........................................................................................................................................57 Figure 24: Comparaison des campagnes GPS d'avril 2005 et mars 2004 à Boursault. La différence des grilles interpolées par un algorithme de distance inverse à un pas de 0.5 m montre une variation s'étallant entre -4 et +6 m, mais avec une majorité des changements confinée entre +20 cm et -20cm. Les plages changements les plus remarquables (large frange bleue et rouge au sud ouest du glissement) ne sont pas significatives puisqu'elles se situent hors du champ mesuré en avril 2005.................................58 Figure 25: Boursault comparaison des altitudes du bourelet frontal entre décembre (T1) et mars 2004 (T0). Les artefacts en "peau de zèbre" de l'interpolation sont très
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
10 BRGM/RP-54688-FR – Rapport final
marquées, cependant autour du bourelet frontal on distingue une diminution des altitudes qui semble être complétée par une augmentation des altitudes en son pied. Les droites A-A' et B-B' se réfèrent aux profiles présentés à la figure ........................................ 59 Figure 26: Boursault comparaison des altitudes du bourelet frontal entre avril 2005 (T2) et mars 2004 (T0). Les plages de variation reflètent toujours les artefacts d'interpolation, mais le bourelet frontal du glissement montre une nette accrétion en pied de versant (frange rouge autour de la petite coline). Au sommet du bourelet l'érosion observée précédemment a été remplacée par une augmentation d'altitude................ 60 Figure 27: Boursault comparaison des altitudes du bourrelet frontal entre avril 2005 et décembre 2004. Une frange rouge contourne la partie haute du bourret alors que le reste des variations d'altitude restent relativement faibles. ........................................................ 61 Figure 28: Boursault, profils topographiques A-A' et B-B' (voir localisation sur les Figure 25, Figure 26 et Figure 27) du bourrelet frontal entre mars 2004 et décembre 2004. Sur le front du glissement, l'altitude a baissé entre ces deux dates, alors qu'au pied du glissement, l'altitude a augmenté. Ceci confirme la tendance observée en plan (Figure 25)................................................................................................................................................ 62 Figure 29: Boursault, profils topographiques A-A' et B-B' (voir localisation sur les Figure 25, Figure 26 et Figure 27) du bourrelet frontal entre décembre 2004 et avril 2005. Le profil A-A' montre une avancée du front du glissement alors que le sommet et le pied restent quasiment sur place. Le profil B-B' montre une augmentation de l'altitude de son sommet à la limite de l'escarpement tandis que l'altitude a baissé à son pied. .......................... 62 Figure 30: Boursault, profils topographiques A-A' et B-B' (voir localisation sur les Figure 25, Figure 26 et Figure 27) du bourrelet frontal pendant une période d'un an entre mars 2004 et avril 2005. La tendance est moins claire que sur les périodes d'été ou d'hiver. Le profil A-A' montre un front de glissement relativement stationnaire le long de l'axe horizontal, mais avec un raidissement des pentes. Le profil B-B' montre également un raidissement du front avec une augmentation légère de l'altitude directement au pied du front.............................................................................................................................................. 63 Figure 31: Champillon, carte du levé GPS de mars 2004 (T0) avec histogramme des altitudes correspondant. .............................................................................................................. 64 Figure 32: Champillon, carte du levé GPS de janvier 2005 (T1) et histogramme des altitudes correspondant. .............................................................................................................. 65 Figure 33: Champillon, carte du levé GPS d'avril 2005 (T2) avec histogramme des altitudes correspondant. .............................................................................................................. 66 Figure 34: Champillon, différence des altitudes de janvier 2005 (T1) et de mars 2004 (T0). Les couleurs rouges correspondent à une augmentation d'altitude, les couleurs bleues correspondent à une diminution....................................................................................... 68 Figure 35: Champillon, différence des altitudes d'avril 2005 et de décembre 2004. Les couleurs rouges marquent une augmentation d'altitude, les couleurs bleues correspondent à une diminution. ................................................................................................. 69 Figure 36: Champillon, différence des altitudes de avril 2005 et de mars 2004. Les couleurs rouges correspondent à une augmentation d'altitude, les couleurs bleues correspondent à une diminution. ................................................................................................. 70 Figure 37: Champillon, modèle numérique de terrain mesuré par laser terrestre interpolé par réseau de triangles irréguliers. Le polygone aux couleurs plus foncées représente la zone couverte par les mesures GPS. Les points laser sur lesquels le MNT a été construit sont distants au plus de 2.5 m. L'effort de mesure a été porté
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 11
essentiellement sur la partie médiane du glissement où quelques 13 stations (triangles jaunes) ont été réalisées. .............................................................................................................76 Figure 38: Champillon, comparaison MNT laser et points GPS. Cette carte donne la position des points GPS dont l'altitude est sousestimée dans le TIN laser. Les points alignés montrant des différences négatives soulignent la présence de murets delimitant les parcelles de vigne (voir explication Figure 40).......................................................................78 Figure 39: Champillon, comparaison des données laser et GPS. Carte des points GPS ayant une altitude surevaluée (voir explication Figure 40). Les zones de couleur verte représentent la plus courte distance à une station du scanner ( de 30 m en vert clair, à 150m en vert foncé, par pas de 30m). Les zones en blanc ne contiennent pas de mesures GPS...............................................................................................................................79 Figure 40: Schéma conceptuel du mode de fonctionnement de l'algorithme de décimation des données laser et comparaison des MNT construit sur base du laser et du GPS. Le nuage de points laser (points noirs, en haut) est découpé en maille (traits gris). Pour chaque maille, l'algorithme retient le point où l'altitude est la plus faible (points rouges marquant le point laser le plus bas). Les points GPS identifient selon le choix du topographe les points où il y a des inflexions de terrain (points bleus). En bas, comparaison de la topographie vraie (brun clair), de la topographie modélisée sur base du GPS (ligne bleue) et modélisée par laser (ligne rouge)..........................................................80 Figure 41: Distribution des écarts d'altitudes entre MNT laser et points GPS. Les altitudes négatives correspondent à une altitude GPS plus basse que la surface laser. Les altitudes positives correspondent à une altitude GPS plus grande que la surface laser. La distribution est symmétrique avec une moyenne de 0.085 m et un écart-type: 0.58m (échantillon de plus de 5000 points). ................................................................................81 Figure 42: Couple de photos aériennes avec identification de points homologues (figure Image Sarl)...................................................................................................................................84 Figure 43: Boursault, mosaïque aérienne prise en mai 2004 avec campagne GPS de mars 2004 pour repère.................................................................................................................86 Figure 44: Champillon, mosaïque aérienne prise en mai 2004 avec campagne GPS de mars 2004 pour repère.................................................................................................................86 Figure 45: Boursault, mosaïque aérienne prise en mai 2004 avec campagne GPS d'avril 2005 pour repère. ..............................................................................................................87 Figure 46: Champillon, mosaïque aérienne prise en novembre 2005 avec campagne GPS d'avril 2005 pour repère.......................................................................................................87 Figure 47: Boursault, modèle numérique de terrain restituant la topographie du milieu du glissement (figure Image Sarl). ...............................................................................................88 Figure 48: Boursault, orthophotographie correspondant au MNT présenté à la Figure 47 (figure Image Sarl). ......................................................................................................................90 Figure 49: Boursault, comparaison d'orthophotographies. A gauche, orthophotographie acquise en mai 2004, à droite orthophotographie acquise en avril 2005. A gauche, le cadre souligne l'emprise de la photo d'avril 2005. Le cercle marque le bosquet qui a disparu entre les deux images (figure Image Sarl). .....................................................................91 Figure 50: Boursault, image représentant le coefficient de corrélation entre pixels des orthophotographies de mai 2004 et avril 2005. L'ellipse signale la position du bosquet disparu entre mai 2004 et avril 2005 (figure Image Sarl).............................................................92
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
12 BRGM/RP-54688-FR – Rapport final
Figure 51: Boursault, champ de déplacement calculé par corrélation optique des orthophotographies présentées à la Figure 49. Les ellipses marquent la position des changement les plus remarquables. Le rectangle souligne une parcelle de vigne sans déplacement horizontal apparent. 10 pixels correspondent à 50 cm de déplacement horizontal (figure Image Sarl). ..................................................................................................... 93 Figure 52: Boursault, comparaison de MNT entre mai 2004 (a) et avril 2005 (b). Le résultat de la comparaison met en évidence l'arrachage du bouquet d'arbe durant les travaux de réhabilitation du site (figure Image Sarl).................................................................... 94 Figure 53: Boursault, vue du front du glissement en direction du nord-ouest en avril 2004.. ........................................................................................................................................... 95 Figure 54: Boursault, vue du front du glissement en direction du nord-ouest en novembre 2005. Le point de vue est identique à la Figure 53. ................................................... 95 Figure 55: Boursault, score de corrélation en comparant les deux photos des Figure 53 et Figure 54. Le violet signale une absence de corrélation. Les couleurs rouges et vertes correspondent aux pixels significativement corrélés. ....................................................... 95
Liste des tableaux
Tableau 1: Chronogramme des campagnes de mesure à Boursault et Champillon. ................. 27 Tableau 2: Coordonnées du point de référence local à Boursault servant de référence aux levés de (voir Figure 2). La position du repère a été relevée au GPS différentiel par rapport à la borne IGN 5159702A. .............................................................................................. 29 Tableau 3: Coordonnées de la borne en granit à Vauciennes gravée IGN, référence 5159702A. Les coordonnées géographiques (latitude/longitude) sont communiquées par rapport à l'ellipsoïde GRS1980 ............................................................................................. 29 Tableau 4: Coordonnées du point de référence local à Champillon servant de référence aux levés de Champillon. La position du repère a été relevée au GPS différentiel par rapport à la borne IGN 5121001A. .............................................................................................. 30 Tableau 5: Coordonnées de la borne en granit à Dizy IGN gravée IGN, référence 5121001A. Les coordonnées géographiques (latitude/longitude) sont communiquées par rapport à l'ellipsoïde GRS1980 ............................................................................................. 30 Tableau 6: Nombre de points levés au D-GPS sur les sites de Boursault et Champillon lors des trois campagnes de mars 2004, décembre 2004/ janvier 2005 et avril 2005................ 31 Tableau 7: Caractéristiques des levés au scanner laser............................................................. 74 Tableau 8: Paramètres d'acquisition des photos aériennes haute résolution à basse altitude. ........................................................................................................................................ 85 Tableau 9: Echelle des photos en fonction de l'altitude de vol et de la distance focale des objectifs utilisés sur le Fuji FinePix S2 Pro. Les distances focales des objectifs doivent être multipliée par 1.5 pour avoir la focale équivalente aux appareils argentiques. ................................................................................................................................. 85 Tableau 10: Tableau de comparaison des trois techniques mises en œuvre pour mesurer le déplacement d'un glissement de terrain. Pour chaque item, les couleurs mettent en évidence la technique la plus favorable ou la moins contraignante (vert: favorable/optimal, jaune: non défavorable; orange: défavorable ). ........................................... 102
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 13
Liste des annexes
Annexe 1 Analyse géostatistique des données GPS à Champillon .........................................107 Annexe 2 Potentiels et limitations de l’imagerie aérienne haute résolution (Drone, Hélicoptère radiocommandé) et fixe pour la caractérisation des mouvements de surface sur la Montagne de Reims .........................................................................................................111
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 15
1. Introduction
1.1. CONTEXTE
Malgré un relief général relativement peu marqué, les études de géologie et de géomorphologie régionales révèlent fréquemment l’occurrence de glissements de terrain en Champagne-Ardenne. Ils représentent des phénomènes courants sur les versants depuis les périodes froides du Quaternaire jusqu'à nos jours, où ils restent un aléa réel sur de nombreux secteurs.
Longtemps considérée, à tort, comme stable, la Montagne de Reims se révèle en fait un secteur propice à leur déclenchement. Les glissements de terrain y sont plus nombreux et plus généralisés qu'on ne le pensait jusqu'alors, surtout dans les parties supérieures des versants qui connaissent les aménagements les plus récents.
Le déclenchement et le fonctionnement de tels phénomènes est la conséquence de l'interaction de nombreux facteurs :
• la topographie avec des pentes relativement fortes dues à la profonde incision de la Marne et de ses affluents dans les formations géologiques du Tertiaire,
• la géologie avec la présence à différents niveaux stratigraphiques d'argiles aux propriétés mécaniques faibles et fortement influencées par la présence et le niveau des eaux souterraines,
• les conditions hydrogéologiques spécifiques dues à la topographie et à la géologie qui conditionnent la présence d’un empilement de nappes d’eau souterraine dont les interactions entre-elles et la surface sont complexes,
• les fluctuations climatiques, la pluviométrie,
• une anthropisation poussée des versants due à l’activité viticole principalement.
L’aléa, longtemps ignoré ou sous-estimé dans la région Champagne-Ardenne, est réel. Les études géomorphologiques, réalisées, depuis plusieurs années, par l’Université de Reims, l’ont prouvé. L’expérience et l’analyse de l’occurrence de ces phénomènes montrent que les conditions requises pour déclencher ces instabilités sont fréquemment réunies et donc, que de nouveaux glissements de terrain sont susceptibles de se produire à l’avenir dans de nombreuses zones ayant été ou non , de mémoire humaine, déjà affectées, entraînant des conséquences qui peuvent s'avérer préjudiciables pour les personnes et les biens.
Il est de ce fait primordial d’étudier en détail le phénomène et ses causes et de tenter d’évaluer de la manière la plus précise l’aléa et le risque qui en découle en fonction des enjeux.
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
16 BRGM/RP-54688-FR – Rapport final
Cette connaissance permettra de se concentrer à terme sur les zones où les risques (aléa × enjeu × vulnérabilité) sont les plus élevés, et de mettre en œuvre de possibles moyens préventifs.
Le projet présenté avait comme objectif de définir des moyens de mesures efficaces des mouvements de surface et d’évaluer précisément la distribution géographique des déplacements, leur ampleur globale et leur vitesse.
1.2. SITES PRESELECTIONNES
Quatre sites potentiels qui pourraient faire l’objet d’investigation et/ou d’instrumentation complémentaires ont été retenus dans une première analyse, réalisée en collaboration avec le Professeur Alain Marre de l’Université de Reims :
• Boursault : glissement survenu en 2000 et qui était actif à la date du début du projet ;
• Champillon : glissement actif depuis plusieurs dizaines d’années et qui concerne principalement l’ancienne route nationale, aujourd’hui déviée ;
• Rilly-la-Montagne : glissement survenu en 1986 et très actif jusqu’en 1988, non stabilisé et sans doute encore actif dans une moindre mesure ;
• Cuis : glissement survenu en 1988 et relativement bien documenté, mais qui semble actuellement stabilisé.
Du fait de l’ampleur des travaux réalisés et de certaines difficultés spécifiques aux sites, seuls les deux premiers ont été retenus et étudiés pour comparer les possibles mouvements de la surface du sol à l’aide des techniques proposées.
1.3. TECHNIQUES TOPOGRAPHIQUES
Ce projet a pour objectif principal de comparer plusieurs techniques topographiques en termes de qualité, de coût et d’évolutivité dans le contexte spécifique des mouvements de terrain de la vallée de la Marne, essentiellement dédiée à l’exploitation vinicole et plus spécifiquement de l'ensemble de la « Montagne de Reims ».
Quatre techniques ont été initialement retenues, elles s’appuient sur des technologies spécifiques qui les rendent complémentaires tout en permettant un certain niveau de comparaison en termes de précision et de coûts. Toutes ont été mises en œuvre lors de campagnes de mesure ponctuelles réalisées par le BRGM en collaboration avec l’Université de Reims. Il s’agit de :
• GPS différentiel ;
• Scanner laser ;
• Photogrammétrie à basse altitude et haute résolution ;
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 17
• Photogrammétrie à haute altitude et basse résolution.
La première technique sera considérée comme la référence de la mesure. En utilisant un GPS différentiel, la topographie des sites sera relevée à un instant donné, cette technique permettra aussi de mettre en place des points de références qui pourront être utilisés dans les déterminations de MNT. Les techniques modernes d’interpolation permettront la création d’un modèle numérique de terrain à un pas adapté aux phénomènes à décrire. Cette opération sera renouvelée dans le temps de manière à définir l’évolution des sites.
La seconde technique est basée sur l’utilisation d’un scanner laser qui permet d’acquérir rapidement un semi de points. Des algorithmes spécifiques devraient également lui permettre de tenir compte de la présence de la végétation (vignes, autres cultures ou forêt) en utilisant des algorithmes permettant de répéter la même visée sur le même point et de ne tenir compte que les distances les plus longues enregistrées à partir d’une même visée. Les semi de points sont ensuite aussi utilisés pour élaborer un modèle numérique de terrain au moyen de techniques d’interpolation.
La troisième technique est basée sur l’interprétation photogrammétrique de clichés pris à basse altitude et au sol. Pour les photographies prises à basse altitude, et contrairement à la technique précédente, ces dernières seront réalisés, spécifiquement sur les sites et à altitude réduite, par un engin télécommandé à partir du sol. L’échelle des photographies peut donc être adaptée à l’étendue du site et à la précision nécessaire. Cette précision sera cependant tributaire de celle de la localisation des points de contrôle qui devront, dans certains cas, être implantés sur le site pour la durée de l’étude. Un modèle numérique de terrain sera également obtenu à partir des données acquises. Les techniques de corrélations mises au point pour les photographies aériennes peuvent également être appliquées sur des images numériques haute résolution acquises par un opérateur depuis un point de vue sur le glissement et réalisées à intervalles réguliers. Après calibration des distorsions internes de l’appareil, correction des distorsions géométriques engendrées par la topographie et élimination des variations radiométriques des images dues aux différences d’illumination entre les prises de vue, les différentes images peuvent également être traduites en termes de déformation de surface, selon l’axe de prise de vue. L’avantage de cette technique est la répétitivité élevée des acquisitions.
La dernière technique proposée est basée sur la valorisation des données contenues dans les clichés aériens réalisés de manière régulière sur l’ensemble de la France par l’IGN. Sur la base d’un géoréférencement précis des images à partir de points de référence, il est possible d’obtenir un semi de points qui peut être qualifiée d’historique. L’ensemble de ces données est utilisé pour construire un modèle numérique de terrain avec un pas plus large et une précision moindre que celui obtenu par la technique précédente. L’intervalle temporel entre les prises de vue sur des mouvements d’ampleur suffisante permet cependant de localiser, sur de grandes surfaces (de l’ordre de quelques dizaines de km²), ces phénomènes. Le niveau de détection sur l’ampleur des mouvements verticaux est espéré entre 1 et 2 m. Cette technique a été utilisée avec succès dans le cas des affaissements miniers. En raison des faibles
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
18 BRGM/RP-54688-FR – Rapport final
mouvements du sol repérés pendant la période de mesure, de difficultés techniques spécifiques et de la limitation des ressources disponibles pour la réalisation du projet, cette technique n’a finalement pas été mise en œuvre.
Cette étude a été réalisée en partenariat entre la région Champagne-Ardenne (Arrêté E200400130 signé le 03/02/2004), l’Agence de l’eau Seine Normandie (Convention 040849 dossier DRYR0510 signé le 14/01/2004) et le BRGM (convention nationale 53/2001 signée le 18/12/2001). Elle a bénéficié d'un appui de l’UER de Reims, avec la participation d'un stagiaire thésard de la Région Champagne-Ardenne, et sous le contrôle technique du Professeur Alain MARRE.
1.4. CONTENU DU RAPPORT
Le présent rapport détaille la mise en œuvre de trois techniques topographiques sur les sites de Boursault et Champillon, à trois époques différentes, et la comparaison des différentes campagnes.
Le chapitre 2 positionne la problématique sur les sites de Boursault et Champillon et présente succinctement les techniques de mesure.
Le chapitre 3 présente le mode opératoire suivi pour mettre les trois techniques en œuvre sur le terrain. Il contient également une critique de la procédure suivie, et des conseils pour une mise en œuvre future.
Le chapitre 4 présente les fondements théoriques que l’on peut appliquer pour caractériser les mesures topographiques et les interpoler.
Les chapitres 5, 6 et 7 présentent les résultats obtenus avec chacune des trois techniques.
Le chapitre 8 conclut et compare les avantages des différentes méthodes.
L’annexe 1 contient une application de la méthode de krigeage évoquée au chapitre 4 sur deux parcelles test du mouvement de terrain de Champillon. Cette analyse n’a pas été incluse dans le corps du rapport puisqu’elle traite d’une expérience menée seulement sur deux parcelles et n’a pas pu être appliquée à l’ensemble des données disponibles.
L’annexe 2 contient le rapport de la SARL Image qui a réalisé l’étude photogrammétrique à haute résolution et basse altitude.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 19
2. Rappel de la problématique
A la suite d'un mouvement de terrain réactivé durant l'hiver 2000 sur la commune de Boursault en Champagne, le BRGM a piloté une étude confrontant trois techniques topographiques susceptibles de mesurer les déformations du sol induites par les mouvements de terrain. Les surfaces auscultées étant régulièrement soumises à des modifications anthropiques, l'objectif scientifique du projet est d’employer plusieurs méthodes de suivi de déformation qui soient externes au sol, et à les comparer. Ces méthodes ont été choisies pour leur définition assez fine, tout en ne nécessitant qu’un minimum d’installations pérennes.
Les techniques employées sont le levé topographique avec une paire d'antennes GPS en mode différentiel cinématique temps réel (D-GPS RTK) ; le levé avec un scanner laser et le levé photogrammétrique par photos aériennes numériques à basse altitude et par photographies terrestres.
Cette étude comparative vise à caractériser les limites des trois techniques en termes de résolution spatiale ; résolution temporelle ; seuil de détection des mouvements ; moyens matériels à mettre en œuvre et ressources.
Quatre équipes ont contribué à la réalisation de l'étude. L'Institut de Géographie de l'Université de Reims s'est chargée de la mesure GPS. La société Image a réalisé les prises de photos aériennes à basse altitude. La société Riegl et ensuite ATM3D ont réalisé pour le BRGM les scans laser.
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
20 BRGM/RP-54688-FR – Rapport final
2.1. LOCALISATION DES SITES EXPERIMENTAUX
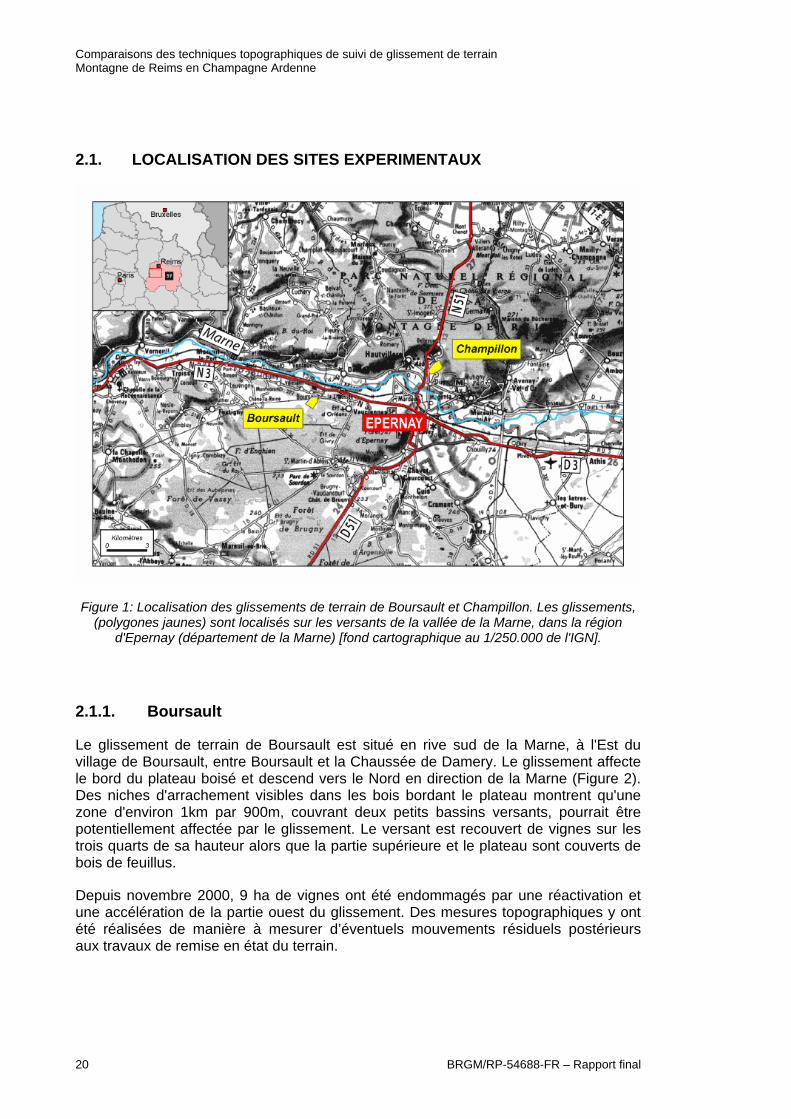
Figure 1: Localisation des glissements de terrain de Boursault et Champillon. Les glissements, (polygones jaunes) sont localisés sur les versants de la vallée de la Marne, dans la région
d'Epernay (département de la Marne) [fond cartographique au 1/250.000 de l'IGN].
2.1.1. Boursault
Le glissement de terrain de Boursault est situé en rive sud de la Marne, à l'Est du village de Boursault, entre Boursault et la Chaussée de Damery. Le glissement affecte le bord du plateau boisé et descend vers le Nord en direction de la Marne (Figure 2). Des niches d'arrachement visibles dans les bois bordant le plateau montrent qu'une zone d'environ 1km par 900m, couvrant deux petits bassins versants, pourrait être potentiellement affectée par le glissement. Le versant est recouvert de vignes sur les trois quarts de sa hauteur alors que la partie supérieure et le plateau sont couverts de bois de feuillus.
Depuis novembre 2000, 9 ha de vignes ont été endommagés par une réactivation et une accélération de la partie ouest du glissement. Des mesures topographiques y ont été réalisées de manière à mesurer d’éventuels mouvements résiduels postérieurs aux travaux de remise en état du terrain.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 21
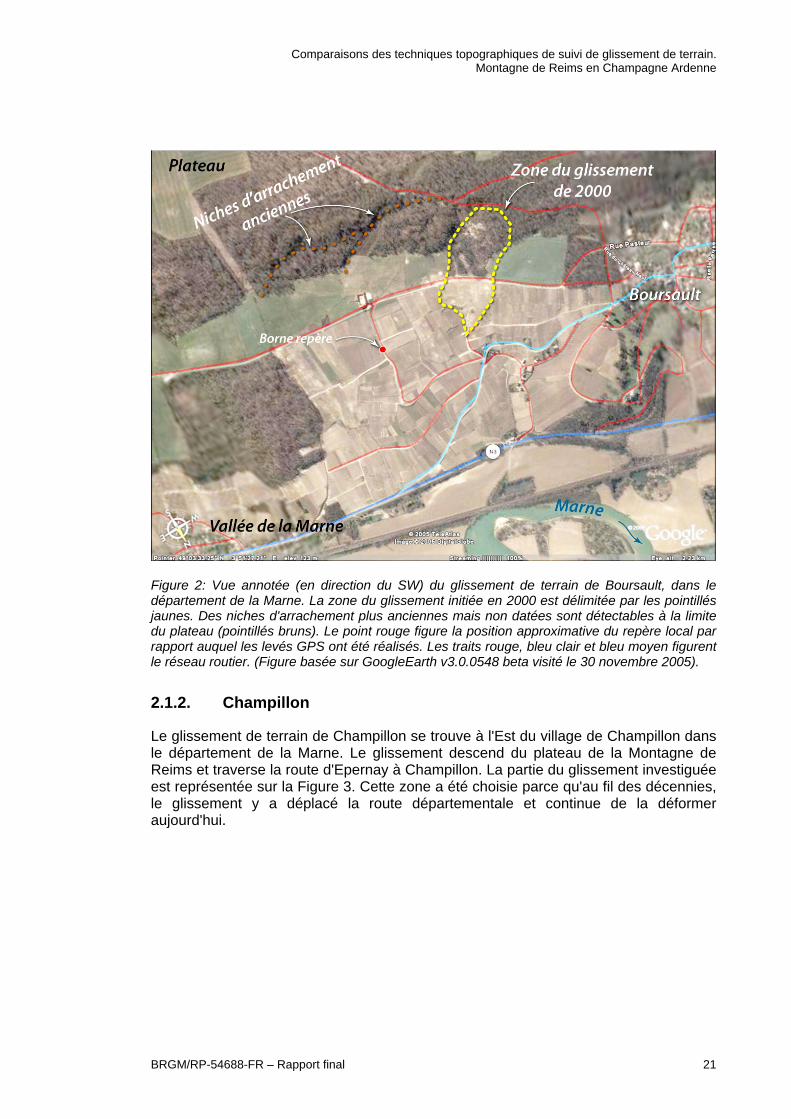
Figure 2: Vue annotée (en direction du SW) du glissement de terrain de Boursault, dans le département de la Marne. La zone du glissement initiée en 2000 est délimitée par les pointillés jaunes. Des niches d'arrachement plus anciennes mais non datées sont détectables à la limite du plateau (pointillés bruns). Le point rouge figure la position approximative du repère local par rapport auquel les levés GPS ont été réalisés. Les traits rouge, bleu clair et bleu moyen figurent le réseau routier. (Figure basée sur GoogleEarth v3.0.0548 beta visité le 30 novembre 2005).
2.1.2. Champillon
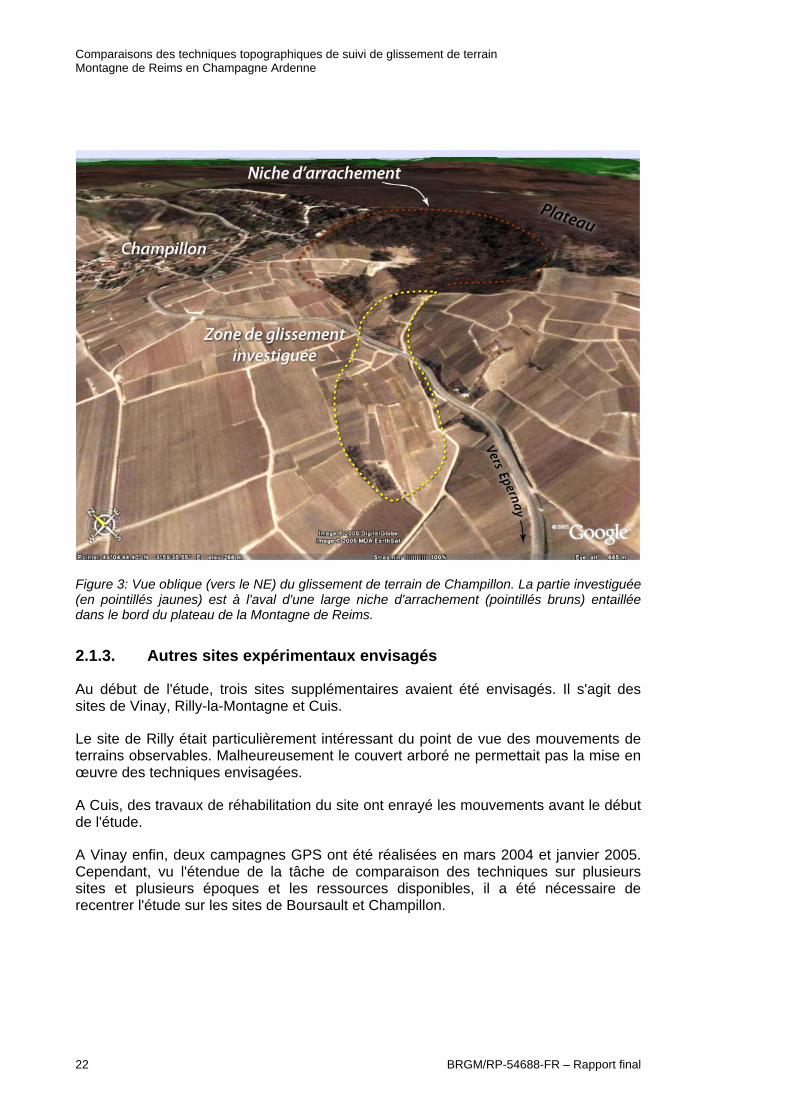
Le glissement de terrain de Champillon se trouve à l'Est du village de Champillon dans le département de la Marne. Le glissement descend du plateau de la Montagne de Reims et traverse la route d'Epernay à Champillon. La partie du glissement investiguée est représentée sur la Figure 3. Cette zone a été choisie parce qu'au fil des décennies, le glissement y a déplacé la route départementale et continue de la déformer aujourd'hui.
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
22 BRGM/RP-54688-FR – Rapport final
Figure 3: Vue oblique (vers le NE) du glissement de terrain de Champillon. La partie investiguée (en pointillés jaunes) est à l'aval d'une large niche d'arrachement (pointillés bruns) entaillée dans le bord du plateau de la Montagne de Reims.
2.1.3. Autres sites expérimentaux envisagés
Au début de l'étude, trois sites supplémentaires avaient été envisagés. Il s'agit des sites de Vinay, Rilly-la-Montagne et Cuis.
Le site de Rilly était particulièrement intéressant du point de vue des mouvements de terrains observables. Malheureusement le couvert arboré ne permettait pas la mise en œuvre des techniques envisagées.
A Cuis, des travaux de réhabilitation du site ont enrayé les mouvements avant le début de l'étude.
A Vinay enfin, deux campagnes GPS ont été réalisées en mars 2004 et janvier 2005. Cependant, vu l'étendue de la tâche de comparaison des techniques sur plusieurs sites et plusieurs époques et les ressources disponibles, il a été nécessaire de recentrer l'étude sur les sites de Boursault et Champillon.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 23
2.2. TECHNIQUES DE MESURE TOPOGRAPHIQUES
2.2.1. D-GPS
Le système GPS (Global Positionning System) différentiel est une technique de positionnement à la surface de la terre utilisant l'observation simultanée de plusieurs satellites. Avec une seule antenne de réception, le système permet un positionnement avec une précision et une exactitude d'une dizaine de mètres. Lorsque le système est utilisé en mode différentiel, c'est-à-dire avec deux antennes recevant les signaux d'au moins 5 satellites identiques, l'exactitude du positionnement reste d'une dizaine de mètres à la surface de la terre, mais la précision de positionnement des antennes l'une par rapport à l'autre descend à quelques centimètres. Lorsqu'une des deux antennes est installée à l'aplomb d'un point de triangulation de l'Institut Géographique National (IGN) connu avec une exactitude centimétrique dans le référentiel cartographique, le levé reste précis au centimètre mais il devient également exact au centimètre.
Le mode de fonctionnement adopté pour les levés D-GPS de Boursault et Champillon suppose qu'une antenne soit laissée fixe sur un repère donné et que la deuxième antenne, mobile, serve à mesurer la position de points topographiques en 3 dimensions. La mesure différentielle en temps réel (mode RTK, pour Real Time Kinematics) suppose l'utilisation d'une radio. L'équipement utilisé pour réaliser les levés à Boursault et à Champillon est un système à deux antennes GPS Trimble 4700 avec lien radio.
La méthode de levé a consisté à mesurer un réseau dense de points pour enregistrer la morphologie du versant sans utiliser de bornes fixes. Cette solution a été contrainte par le fait que les vignes sont des terrains agricoles parcourus régulièrement par des machines et sur lesquels le maintien de bornes n'était pas réalisable.
L'avantage d'un levé au GPS différentiel (D-GPS) en mode temps réel est qu'il permet mesurer des points avec un minimum de post-traitement, sur une surface de quelques centaines de mètres à quelques kilomètres, avec comme seule contrainte de conserver une vue directe sur un minimum de 5 satellites communs aux deux antennes. Comme l'opérateur doit positionner l'antenne mobile en contact avec le sol pendant plusieurs secondes pour prendre la mesure, on est certain que le point mesuré est exactement située au sol.
L'inconvénient est qu'il est nécessaire de stationner physiquement avec l'antenne au dessus de chaque point à mesurer. Les campagnes de mesures sur Boursault et Champillon comptent plusieurs milliers de points de mesure, qui ont nécessité plusieurs semaines de travail à chaque époque de mesure.
2.2.2. Scanner laser
Le scanner laser est un système de mesure sophistiqué émettant de courtes impulsion laser et mesurant le temps que met chaque impulsion pour lui revenir lorsqu'elle est réfléchie par un objet. Tous les objets visibles à partir de la station du laser sont
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
24 BRGM/RP-54688-FR – Rapport final
susceptibles de réfléchir l'impulsion. Leur position est calculée grâce à la direction dans laquelle l'impulsion a été envoyée et au temps que l'impulsion a mise pour revenir au laser. En balayant toutes les directions de l'espace autour de sa station, le scanner mesure un "nuage" de points très dense. La reconstitution d'une zone d'étude nécessite d'occuper plusieurs points de vue, ou stations, de manière à couvrir toutes les zones d'ombre.
L'équipement utilisé à Boursault et à Champillon est un scanner laser Riegl, de fabrication autrichienne de type LMS-Z420i. Il s'agit d'une tourelle balayant les 360° du tour d'horizon sur un champ de 90° d'ouverture. La portée efficace du rayon laser est comprise entre 2 m et 800 m (bien qu'une distance de 300 à 400 m soit plus souhaitable) .
L'avantage de cette technique est de mesurer la position 3D de tout objet visible à partir du scanner, sans aucune intervention humaine sur le point visé. La précision intrinsèque de la mesure dépend de la précision de mesure du temps de trajet de l'impulsion laser et de l'incrément d'angle minimum dont le scanner peut tourner. Typiquement, pour les chantiers de Boursault et Champillon, où les portées n'excédaient guère 300 m, chaque point est connu avec une précision de l'ordre de 1 cm. La véritable limite de cette méthode, à l'échelle d'un chantier, est de pouvoir replacer précisément tous les nuages de points dans le même référentiel. Ceci est réalisé en localisant chaque scan par rapport à des cibles positionnées tout autour du chantier. Si leur position est déterminée avec un D-GPS, la précision résultante de la campagne laser sera celle du D-GPS.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 25
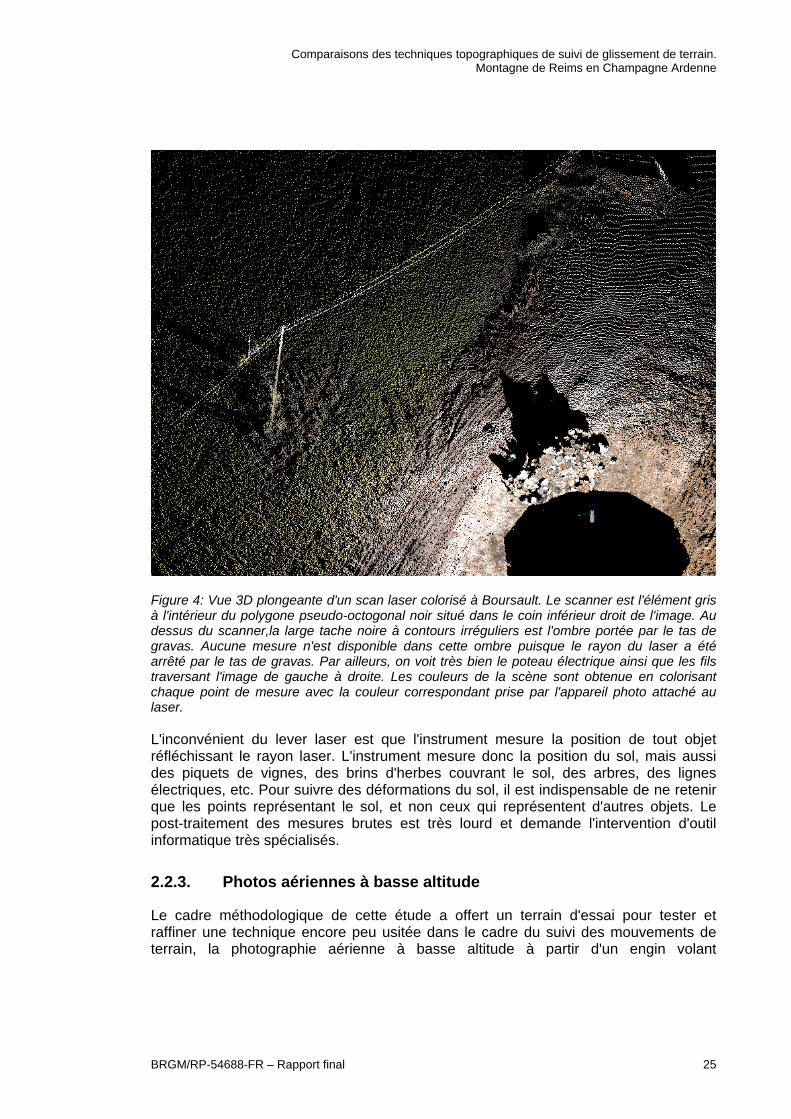
Figure 4: Vue 3D plongeante d'un scan laser colorisé à Boursault. Le scanner est l'élément gris à l'intérieur du polygone pseudo-octogonal noir situé dans le coin inférieur droit de l'image. Au dessus du scanner,la large tache noire à contours irréguliers est l'ombre portée par le tas de gravas. Aucune mesure n'est disponible dans cette ombre puisque le rayon du laser a été arrêté par le tas de gravas. Par ailleurs, on voit très bien le poteau électrique ainsi que les fils traversant l'image de gauche à droite. Les couleurs de la scène sont obtenue en colorisant chaque point de mesure avec la couleur correspondant prise par l'appareil photo attaché au laser.
L'inconvénient du lever laser est que l'instrument mesure la position de tout objet réfléchissant le rayon laser. L'instrument mesure donc la position du sol, mais aussi des piquets de vignes, des brins d'herbes couvrant le sol, des arbres, des lignes électriques, etc. Pour suivre des déformations du sol, il est indispensable de ne retenir que les points représentant le sol, et non ceux qui représentent d'autres objets. Le post-traitement des mesures brutes est très lourd et demande l'intervention d'outil informatique très spécialisés.
2.2.3. Photos aériennes à basse altitude
Le cadre méthodologique de cette étude a offert un terrain d'essai pour tester et raffiner une technique encore peu usitée dans le cadre du suivi des mouvements de terrain, la photographie aérienne à basse altitude à partir d'un engin volant
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
26 BRGM/RP-54688-FR – Rapport final
radiocommandé (paramoteur et hélicoptère). Un tel système offre une vue synoptique du terrain à partir des airs, et vise à être suffisamment flexible pour offrir de fréquentes acquisitions de photos même avec un budget limité. Cette technique étant toujours expérimentale, les tests sur Boursault et Champillon ont donné lieu à divers développements.
Deux modes d'exploitation des photos aériennes ont été testés: d'une part, la comparaison de Modèle Numérique de Terrain photogrammétriques et d'autre part, la comparaison pixel par pixel d'orthophotographies. La comparaison des MNT apporte des informations sur les variations d'altitudes au droit des nœuds d'une grille régulière, alors que la comparaison d'orthophotos permet d'identifier les endroits affectés par des mouvements de masse horizontaux.
Comme pour les autres techniques d'imagerie, la qualité des comparaisons est dépendante de la précision de positionnement des images et du contenu de ces images. Il est impératif de réaliser les campagnes photographiques à des époques où la couverture végétale est limitée, de manière à mesurer l'altitude du sol, et non pas la hauteur de la strate végétale. Et d'autre part, la comparaison des orthophotos requiert que les lieux restent suffisamment semblables entre deux campagnes pour tracer le déplacement d'objet reconnaissable au fil du temps. Si le terrain a été complètement remodelé, les scènes ne se ressemblent plus suffisamment et la comparaison n'est plus possible.
Durant l'étude, deux plateformes radiocommandées ont été testée: un para-moteur et un hélicoptère. Le para-moteur employé initialement est idéal de par sa robustesse, sa faible vitesse de vol (assurant des images nettes même en faibles lumières) et son large rayon d'action. Malheureusement, il est assez sensible au vent et n'a qu'une charge embarquée limitée. L'hélicoptère radiocommandé, testé lors de la dernière campagne de mesure, résout ces deux limitations. En plus de pouvoir voler en stationnaire, l'hélicoptère est peu sensible au vent et peut embarquer une charge utile jusqu'à deux fois supérieure à celle du para-moteur. Par contre, son rayon d'action est inférieur et il requiert une très grande maîtrise du pilotage.
L'avantage de la photographie à basse altitude est d'offrir une technique d'acquisition de la topographie très rapide et à relativement haute fréquence comparée aux campagnes photographiques mises à disposition par l'Institut Géographique National. Par ailleurs, le déploiement du para-moteur ou de l'hélicoptère est relativement léger et moins coûteux que les campagnes de photos aériennes classiques.
Les campagnes de photos souffrent cependant de plusieurs limitations très contraignantes: les conditions climatiques coïncidant avec les périodes de faible couverture végétales sont peu propices à des conditions optimales de prise de vue. Par ailleurs, sur Boursault, les travaux de réhabilitation destinés à permettre la nouvelle plantation de vignes suite au glissement de 2000 ont radicalement modifiés la morphologie du terrain entre chaque campagne de photo. Ces travaux ont rendu quasiment inexploitables la technique de comparaison d'orthophotographies et inutile la comparaison des MNT dans la zone remodelée.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 27
2.3. CALENDRIER D'ACQUISITION DES MESURES
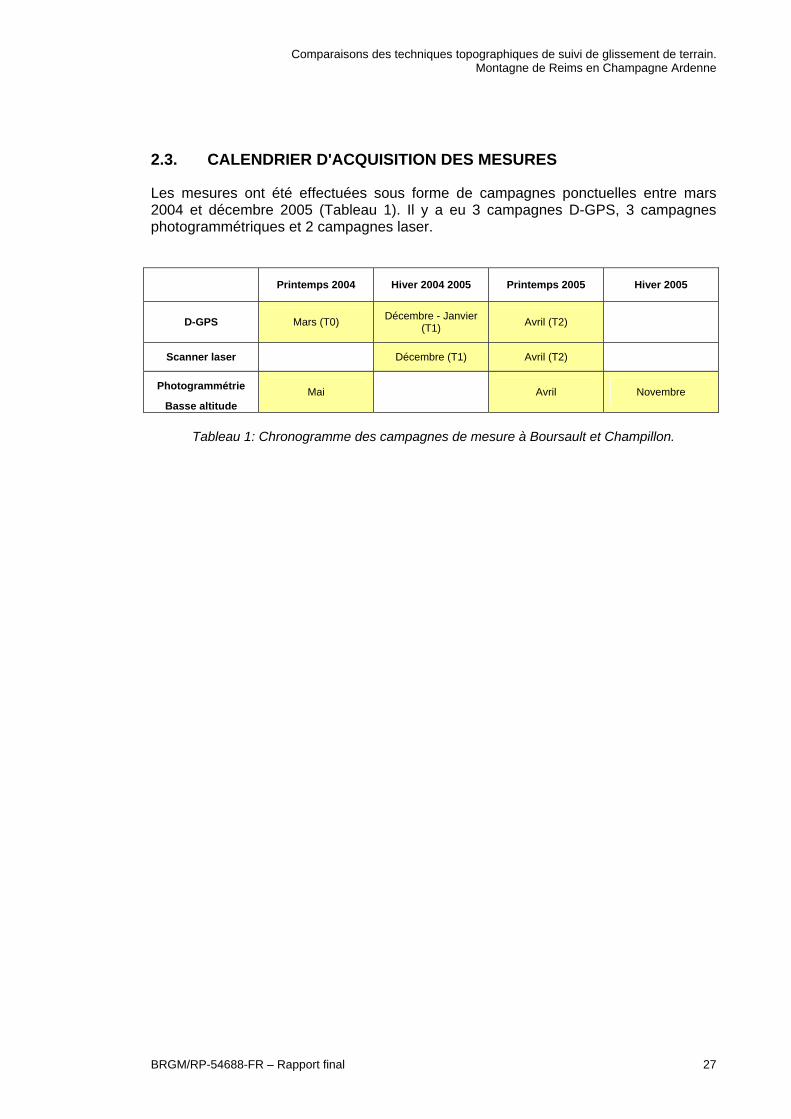
Les mesures ont été effectuées sous forme de campagnes ponctuelles entre mars 2004 et décembre 2005 (Tableau 1). Il y a eu 3 campagnes D-GPS, 3 campagnes photogrammétriques et 2 campagnes laser.
Printemps 2004 Hiver 2004 2005 Printemps 2005 Hiver 2005
D-GPS Mars (T0) Décembre - Janvier (T1) Avril (T2)
Scanner laser Décembre (T1) Avril (T2)
Photogrammétrie
Basse altitude Mai Avril Novembre
Tableau 1: Chronogramme des campagnes de mesure à Boursault et Champillon.
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
28 BRGM/RP-54688-FR – Rapport final
3. Modes opératoires
3.1. D-GPS
3.1.1. Préparation
La mise en place d'une campagne D-GPS requiert l'installation d'une antenne fixe au dessus d'un point donné. Idéalement, ce point doit être connu en trois dimensions dans le système cartographique qui est utilisé comme référence. Pour ce faire, il est optimal d'installer l'antenne fixe à l'aplomb d'une borne géodésique de l'Institut Géographique National (IGN). En pratique, il arrive que la borne IGN soit trop proche d'une route pour y laisser une antenne GPS sans surveillance, ou que le signal radio entre l'antenne fixe et l'antenne mobile soit bloqué par un obstacle. Dans ces deux cas de figure, il faut installer un repère local qui sera mesuré une fois pour toute par rapport au réseau géodésique IGN et qui servira de référence pour les levés suivants.
Les mesures ont été prises dans le système de coordonnées nationales Lambert Zone I (appelé NTF Lambert Zone I dans ArcGIS). Ce système de coordonnées est le plus approprié de ceux disponibles dans le carnet de terrain du GPS Trimble.
3.1.2. Référence de Boursault
Le levé GPS de Boursault a été réalisé par rapport à une borne implantée pour l'étude (piquet métallique équipé d'une tête de borne carrée rouge muni d'un bouchon jaune) (Tableau 2). Cette borne a été localisée en mars 2004 par rapport à la borne en granit e gravée IGN 5159702A située à Vauciennes (fiche signalétique disponible sur internet http://geodesie.ign.fr/fiches/fiche_geodesie.asp?num_site=5159702&X=713300&Y=2451600) (voir Tableau 3). Cette borne est située le long d'un chemin de vigne montant de la route National 3 vers le milieu du versant de la Chaussée de Damery. Située sur la crête surplombant le terrain d'étude, 300m à l'est du glissement.
Le point de référence local a été implanté sur une crête directement visible du glissement de Boursault. La géologie du sol tend à prouver par ailleurs que le point y est localisé sur un sous-bassement crayeux sain qui peut être considéré comme stable.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 29
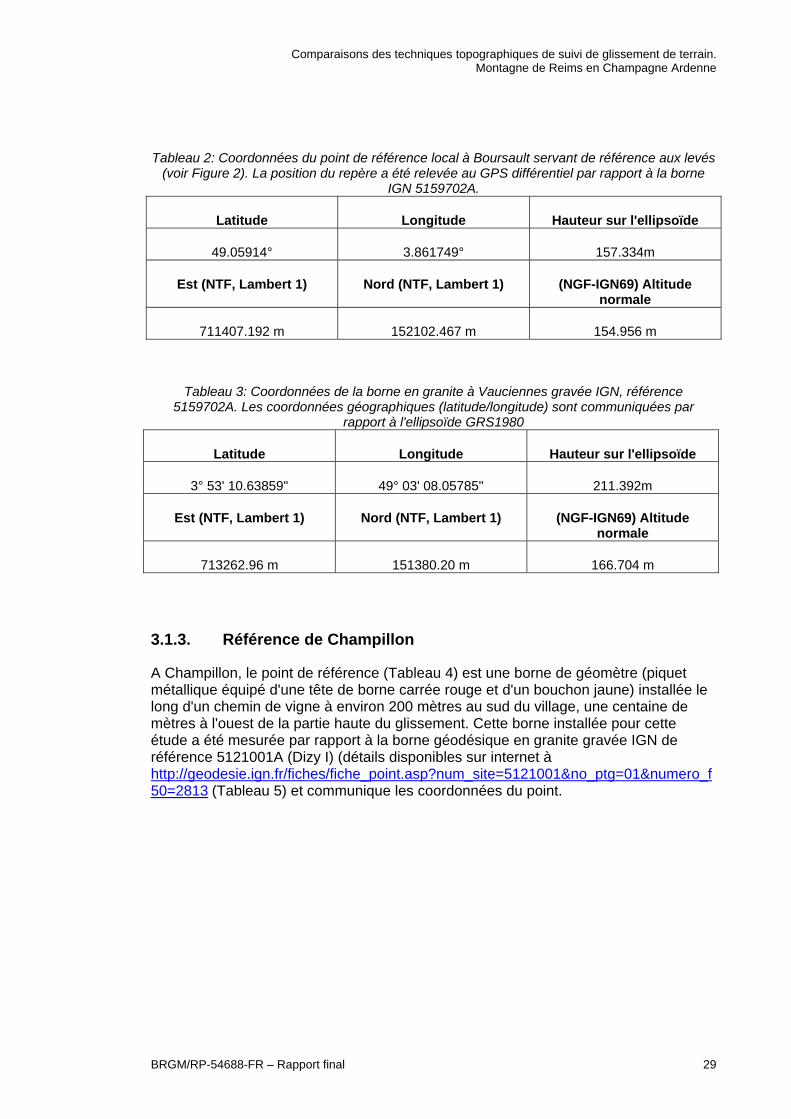
Tableau 2: Coordonnées du point de référence local à Boursault servant de référence aux levés (voir Figure 2). La position du repère a été relevée au GPS différentiel par rapport à la borne
IGN 5159702A.
Latitude Longitude Hauteur sur l'ellipsoïde
49.05914° 3.861749° 157.334m
Est (NTF, Lambert 1) Nord (NTF, Lambert 1) (NGF-IGN69) Altitude normale
711407.192 m 152102.467 m 154.956 m
Tableau 3: Coordonnées de la borne en granite à Vauciennes gravée IGN, référence 5159702A. Les coordonnées géographiques (latitude/longitude) sont communiquées par
rapport à l'ellipsoïde GRS1980
Latitude Longitude Hauteur sur l'ellipsoïde
3° 53' 10.63859" 49° 03' 08.05785" 211.392m
Est (NTF, Lambert 1) Nord (NTF, Lambert 1) (NGF-IGN69) Altitude normale
713262.96 m 151380.20 m 166.704 m
3.1.3. Référence de Champillon
A Champillon, le point de référence (Tableau 4) est une borne de géomètre (piquet métallique équipé d'une tête de borne carrée rouge et d'un bouchon jaune) installée le long d'un chemin de vigne à environ 200 mètres au sud du village, une centaine de mètres à l'ouest de la partie haute du glissement. Cette borne installée pour cette étude a été mesurée par rapport à la borne géodésique en granite gravée IGN de référence 5121001A (Dizy I) (détails disponibles sur internet à http://geodesie.ign.fr/fiches/fiche_point.asp?num_site=5121001&no_ptg=01&numero_f50=2813 (Tableau 5) et communique les coordonnées du point.
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
30 BRGM/RP-54688-FR – Rapport final
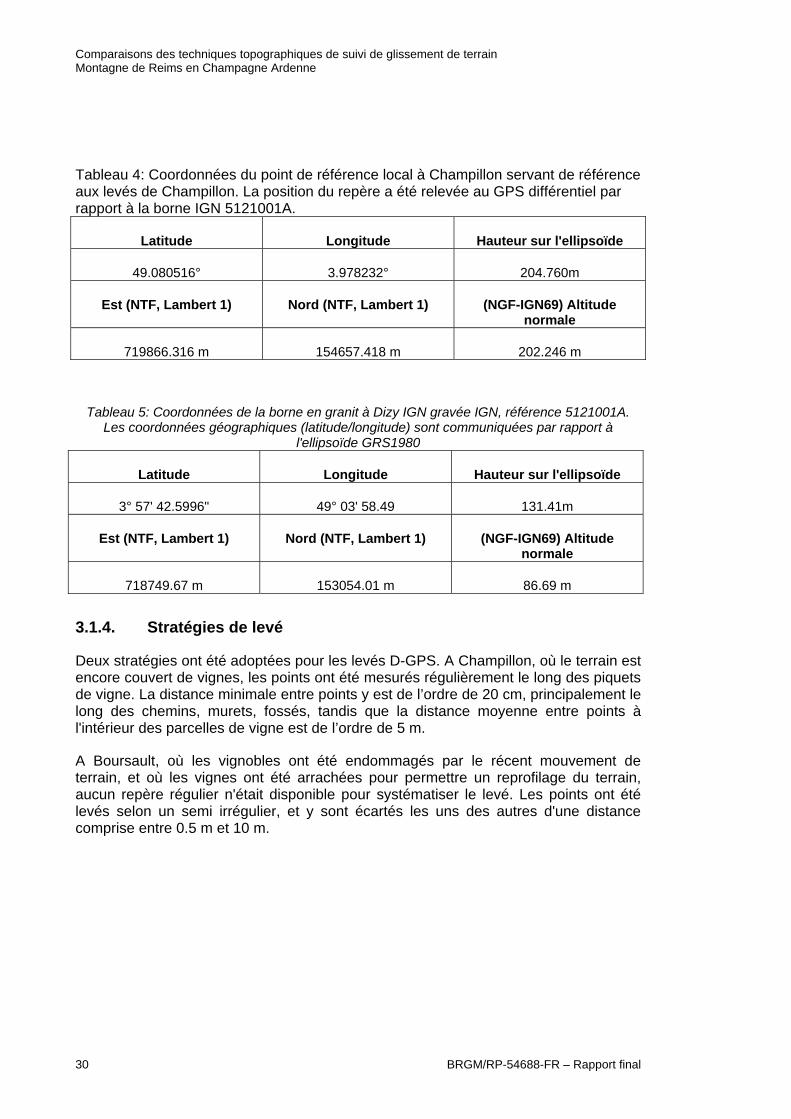
Tableau 4: Coordonnées du point de référence local à Champillon servant de référence aux levés de Champillon. La position du repère a été relevée au GPS différentiel par rapport à la borne IGN 5121001A.
Latitude Longitude Hauteur sur l'ellipsoïde
49.080516° 3.978232° 204.760m
Est (NTF, Lambert 1) Nord (NTF, Lambert 1) (NGF-IGN69) Altitude normale
719866.316 m 154657.418 m 202.246 m
Tableau 5: Coordonnées de la borne en granit à Dizy IGN gravée IGN, référence 5121001A. Les coordonnées géographiques (latitude/longitude) sont communiquées par rapport à
l'ellipsoïde GRS1980
Latitude Longitude Hauteur sur l'ellipsoïde
3° 57' 42.5996" 49° 03' 58.49 131.41m
Est (NTF, Lambert 1) Nord (NTF, Lambert 1) (NGF-IGN69) Altitude normale
718749.67 m 153054.01 m 86.69 m
3.1.4. Stratégies de levé
Deux stratégies ont été adoptées pour les levés D-GPS. A Champillon, où le terrain est encore couvert de vignes, les points ont été mesurés régulièrement le long des piquets de vigne. La distance minimale entre points y est de l’ordre de 20 cm, principalement le long des chemins, murets, fossés, tandis que la distance moyenne entre points à l'intérieur des parcelles de vigne est de l’ordre de 5 m.
A Boursault, où les vignobles ont été endommagés par le récent mouvement de terrain, et où les vignes ont été arrachées pour permettre un reprofilage du terrain, aucun repère régulier n'était disponible pour systématiser le levé. Les points ont été levés selon un semi irrégulier, et y sont écartés les uns des autres d'une distance comprise entre 0.5 m et 10 m.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 31
Tableau 6: Nombre de points levés au D-GPS sur les sites de Boursault et Champillon lors des trois campagnes de mars 2004, décembre 2004/ janvier 2005 et avril 2005.
Boursault Champillon
Mars 2004 3318 pts 4696 pts
Décembre 2004/Janvier 2005 4193 pts 5575 pts
Avril 2005 1625 pts 6171 pts
3.2. SCANNER LASER
Le mode de fonctionnement d'une campagne de scanner laser se déroule en 6 étapes:
1. installer et mesurer les cibles;
2. stationner le scanner;
3. calculer la position du scanner;
4. mesurer un panorama ;
5. prendre les photos;
6. examiner les zones d'ombres et déplacer le scanner.
3.2.1. Installation et mesure de cibles
Un levé scanner laser demande généralement qu'on prenne des mesures de plusieurs points de vue pour couvrir l'ensemble de la zone d'étude et éviter les ombres portées des objets (Figure 4). Pour ce faire, on installe des cibles qui resteront fixées sur le chantier pendant le temps de l'opération et qui serviront de points de référence sur lesquels rattacher la position du scanner. Comme ces cibles sont mesurées dans un référentiel absolu, on peut ainsi calculer les positions respectives des différentes stations du scanner par relèvement.
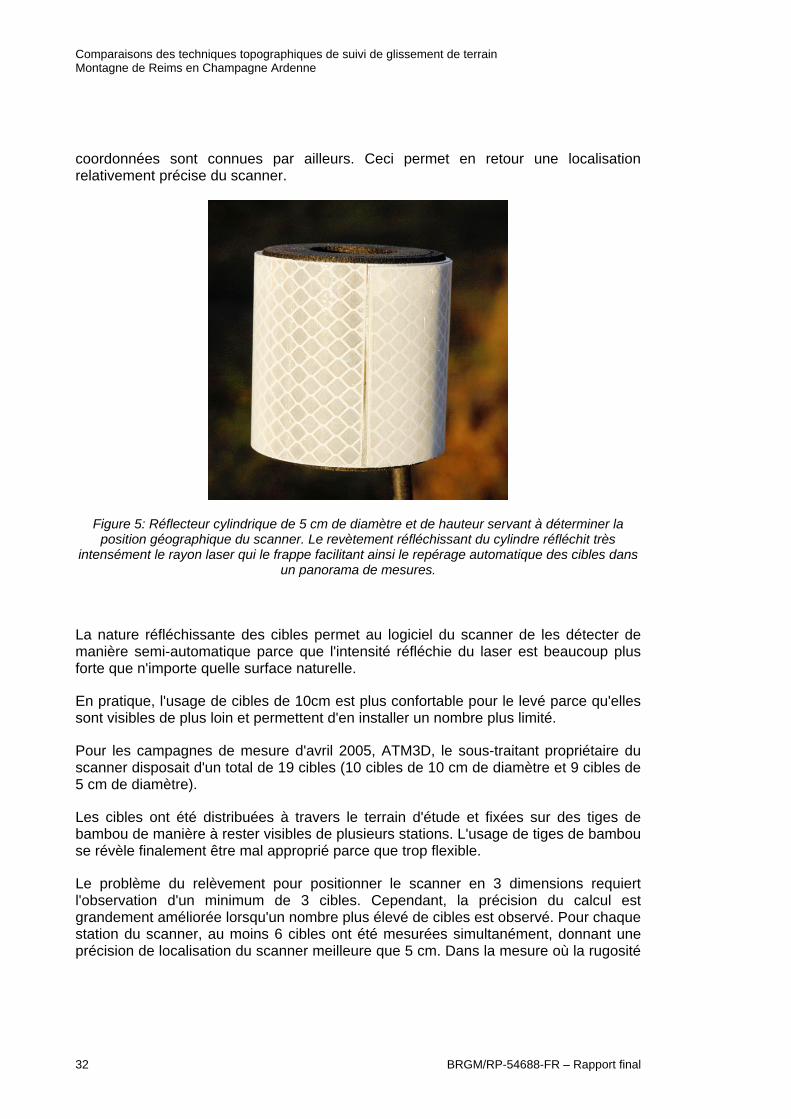
Les cibles sont des cylindres (de type tuyau d'évacuation sanitaire en PVC) de taille connue recouverts d'un matériau très réfléchissant similaire à celui des panneaux routiers de signalisation (Figure 5). Les cylindres ont une hauteur égale à leur diamètre de sorte que quel que soit l'angle sous lequel ils sont visés, ils ressemblent toujours à un objet carré. La taille des cibles utilisées fait soit 5 cm de diamètre par 5cm de hauteur, soit 10 cm de diamètre et 10 cm de hauteur. Ces tailles standard permettent au logiciel du scanner de retrouver exactement le centre de masse de la cible, dont les
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
32 BRGM/RP-54688-FR – Rapport final
coordonnées sont connues par ailleurs. Ceci permet en retour une localisation relativement précise du scanner.
Figure 5: Réflecteur cylindrique de 5 cm de diamètre et de hauteur servant à déterminer la position géographique du scanner. Le revètement réfléchissant du cylindre réfléchit très
intensément le rayon laser qui le frappe facilitant ainsi le repérage automatique des cibles dans un panorama de mesures.
La nature réfléchissante des cibles permet au logiciel du scanner de les détecter de manière semi-automatique parce que l'intensité réfléchie du laser est beaucoup plus forte que n'importe quelle surface naturelle.
En pratique, l'usage de cibles de 10cm est plus confortable pour le levé parce qu'elles sont visibles de plus loin et permettent d'en installer un nombre plus limité.
Pour les campagnes de mesure d'avril 2005, ATM3D, le sous-traitant propriétaire du scanner disposait d'un total de 19 cibles (10 cibles de 10 cm de diamètre et 9 cibles de 5 cm de diamètre).
Les cibles ont été distribuées à travers le terrain d'étude et fixées sur des tiges de bambou de manière à rester visibles de plusieurs stations. L'usage de tiges de bambou se révèle finalement être mal approprié parce que trop flexible.
Le problème du relèvement pour positionner le scanner en 3 dimensions requiert l'observation d'un minimum de 3 cibles. Cependant, la précision du calcul est grandement améliorée lorsqu'un nombre plus élevé de cibles est observé. Pour chaque station du scanner, au moins 6 cibles ont été mesurées simultanément, donnant une précision de localisation du scanner meilleure que 5 cm. Dans la mesure où la rugosité
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 33
du sol et le couvert végétal limitent fortement la précision de mesure du sol, ce niveau d'erreur est acceptable bien que pas optimal.
La solution la plus désirable consisterait à implanter des cibles sur des supports fixes et rigides (p. ex. piquets métalliques plantés profondément dans le sol pour le temps de l'opération) et de les relever avec un tachéomètre. Cette solution offrirait une précision de positionnement relative du scanner de l'ordre de 1 à 2 cm. Le maintien de points de référence fixes dans les lieux fréquentés par du public reste cependant problématique. Il est dangereux de baser la réussite d’un suivi pluriannuel sur la pérennité de ce type de référence.
3.2.2. Mise en station du scanner
Le scanner est installé sur un trépied à hauteur d'homme. Comme l'équipement est très lourd (entre 30 et 40 kg), il est difficile de monter le scanner plus haut qu'une hauteur d'épaule.
La mise en station du scanner ne requiert pas de soin particulier. Il n'est pas nécessaire de niveler l'équipement puisque la position de la tourelle sera déterminée automatiquement lors de l'identification des cibles fixes dont les coordonnées sont connues par ailleurs.
D'un point de vue pratique, l'équipement à apporter à chaque station est assez lourd (environ 100 kg de matériel tous équipements confondus). En plus du scanner et du trépied, il faut installer le PC portable qui pilote l'équipement et un générateur électrique ou une batterie de voiture pour alimenter le tout. Il est également utile d'avoir un parapluie pour se protéger et améliorer la visibilité sur l'écran de l'ordinateur. Au final, il est utile de compter réaliser la campagne avec deux à trois opérateurs.

Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
34 BRGM/RP-54688-FR – Rapport final
Figure 6: Scanner laser mis en station à Champillon en décembre 2004. Le scanner et l'appareil photo (au dessus de la tourelle du scanner) sont pilotés par le PC portable installé au pied du trépied. L'alimentation électrique du système se fait à partir d'une batterie de voiture. Les caisses de transport du matériel permettent un transport sans danger d'une station à l'autre.
3.2.3. Calcul de la position du scanner
Le logiciel de pilotage du scanner comprend des fonctionnalités permettant de repérer semi-automatiquement les cibles et de calculer la position du scanner par relèvement. Le calcul de position du scanner se fait par un ajustement par moindres carrés. Dans des conditions optimales, la position du scanner peut être déterminée à moins de 1.5 cm en XYZ. Cependant, ceci n'est vrai lorsque que :
• un grand nombre de cibles est visible depuis la station (typiquement à partir de 7-8 cibles) ;
• ces cibles sont réparties tout autour du scan (tout autour des 360° du panorama) ;
• la position des cibles est très précisément déterminée.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 35
3.2.4. Mesure du panorama
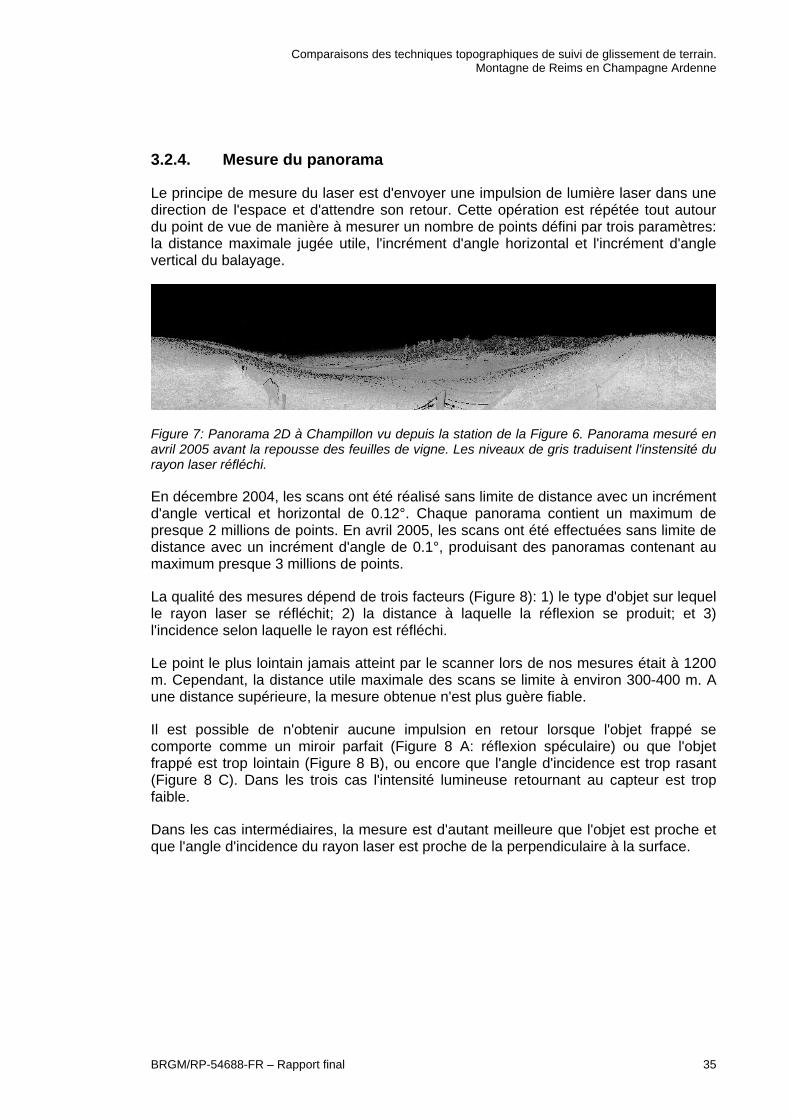
Le principe de mesure du laser est d'envoyer une impulsion de lumière laser dans une direction de l'espace et d'attendre son retour. Cette opération est répétée tout autour du point de vue de manière à mesurer un nombre de points défini par trois paramètres: la distance maximale jugée utile, l'incrément d'angle horizontal et l'incrément d'angle vertical du balayage.
Figure 7: Panorama 2D à Champillon vu depuis la station de la Figure 6. Panorama mesuré en avril 2005 avant la repousse des feuilles de vigne. Les niveaux de gris traduisent l'instensité du rayon laser réfléchi.
En décembre 2004, les scans ont été réalisé sans limite de distance avec un incrément d'angle vertical et horizontal de 0.12°. Chaque panorama contient un maximum de presque 2 millions de points. En avril 2005, les scans ont été effectuées sans limite de distance avec un incrément d'angle de 0.1°, produisant des panoramas contenant au maximum presque 3 millions de points.
La qualité des mesures dépend de trois facteurs (Figure 8): 1) le type d'objet sur lequel le rayon laser se réfléchit; 2) la distance à laquelle la réflexion se produit; et 3) l'incidence selon laquelle le rayon est réfléchi.
Le point le plus lointain jamais atteint par le scanner lors de nos mesures était à 1200 m. Cependant, la distance utile maximale des scans se limite à environ 300-400 m. A une distance supérieure, la mesure obtenue n'est plus guère fiable.
Il est possible de n'obtenir aucune impulsion en retour lorsque l'objet frappé se comporte comme un miroir parfait (Figure 8 A: réflexion spéculaire) ou que l'objet frappé est trop lointain (Figure 8 B), ou encore que l'angle d'incidence est trop rasant (Figure 8 C). Dans les trois cas l'intensité lumineuse retournant au capteur est trop faible.
Dans les cas intermédiaires, la mesure est d'autant meilleure que l'objet est proche et que l'angle d'incidence du rayon laser est proche de la perpendiculaire à la surface.
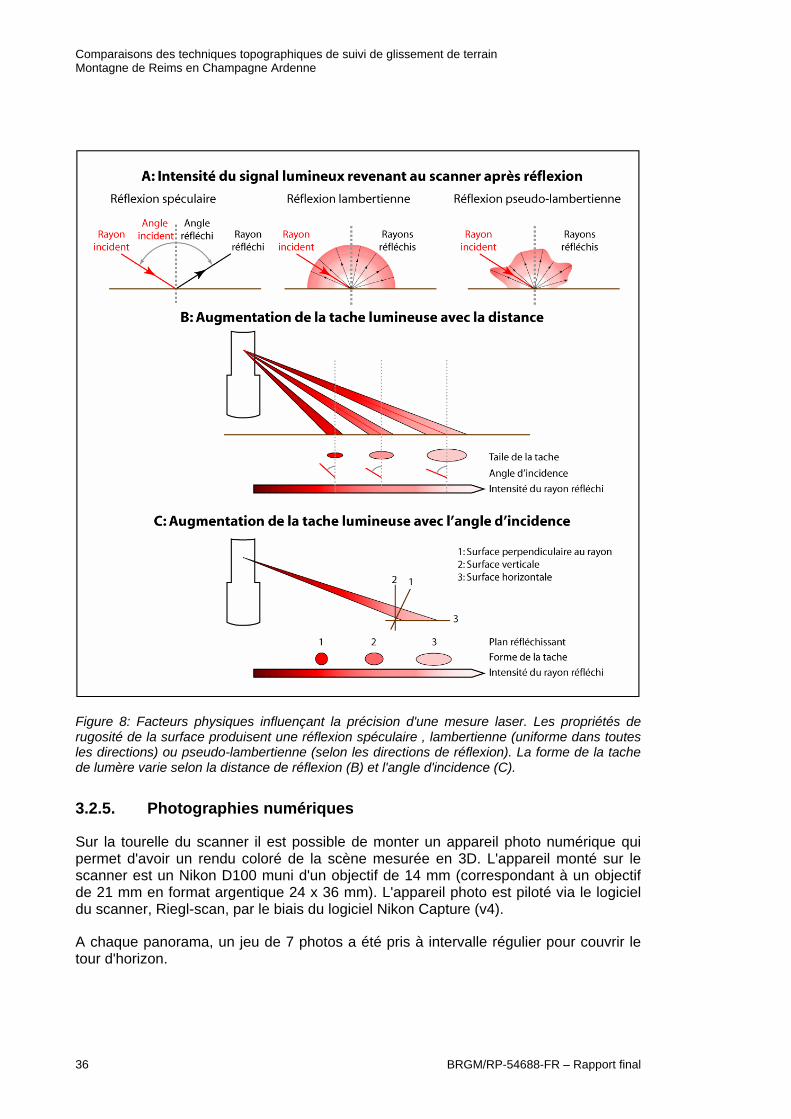
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
36 BRGM/RP-54688-FR – Rapport final
Figure 8: Facteurs physiques influençant la précision d'une mesure laser. Les propriétés de rugosité de la surface produisent une réflexion spéculaire , lambertienne (uniforme dans toutes les directions) ou pseudo-lambertienne (selon les directions de réflexion). La forme de la tache de lumère varie selon la distance de réflexion (B) et l'angle d'incidence (C).
3.2.5. Photographies numériques
Sur la tourelle du scanner il est possible de monter un appareil photo numérique qui permet d'avoir un rendu coloré de la scène mesurée en 3D. L'appareil monté sur le scanner est un Nikon D100 muni d'un objectif de 14 mm (correspondant à un objectif de 21 mm en format argentique 24 x 36 mm). L'appareil photo est piloté via le logiciel du scanner, Riegl-scan, par le biais du logiciel Nikon Capture (v4).
A chaque panorama, un jeu de 7 photos a été pris à intervalle régulier pour couvrir le tour d'horizon.
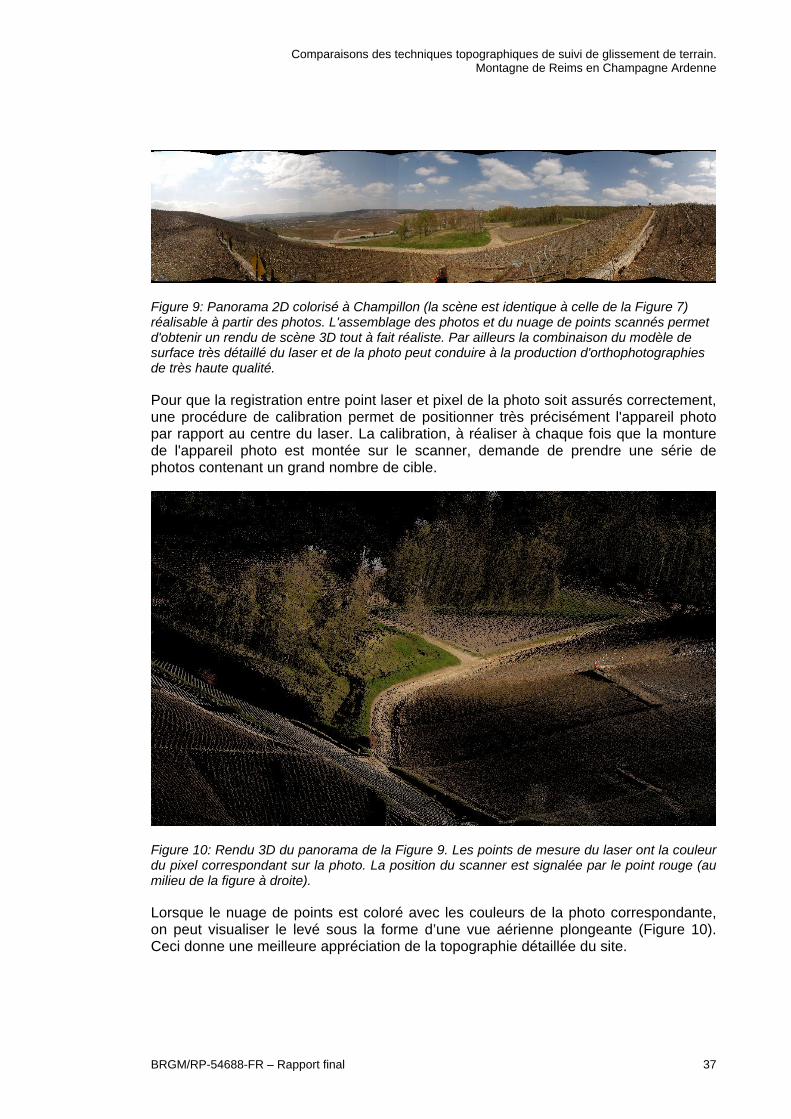
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 37
Figure 9: Panorama 2D colorisé à Champillon (la scène est identique à celle de la Figure 7) réalisable à partir des photos. L'assemblage des photos et du nuage de points scannés permet d'obtenir un rendu de scène 3D tout à fait réaliste. Par ailleurs la combinaison du modèle de surface très détaillé du laser et de la photo peut conduire à la production d'orthophotographies de très haute qualité.
Pour que la registration entre point laser et pixel de la photo soit assurés correctement, une procédure de calibration permet de positionner très précisément l'appareil photo par rapport au centre du laser. La calibration, à réaliser à chaque fois que la monture de l'appareil photo est montée sur le scanner, demande de prendre une série de photos contenant un grand nombre de cible.
Figure 10: Rendu 3D du panorama de la Figure 9. Les points de mesure du laser ont la couleur du pixel correspondant sur la photo. La position du scanner est signalée par le point rouge (au milieu de la figure à droite).
Lorsque le nuage de points est coloré avec les couleurs de la photo correspondante, on peut visualiser le levé sous la forme d’une vue aérienne plongeante (Figure 10). Ceci donne une meilleure appréciation de la topographie détaillée du site.
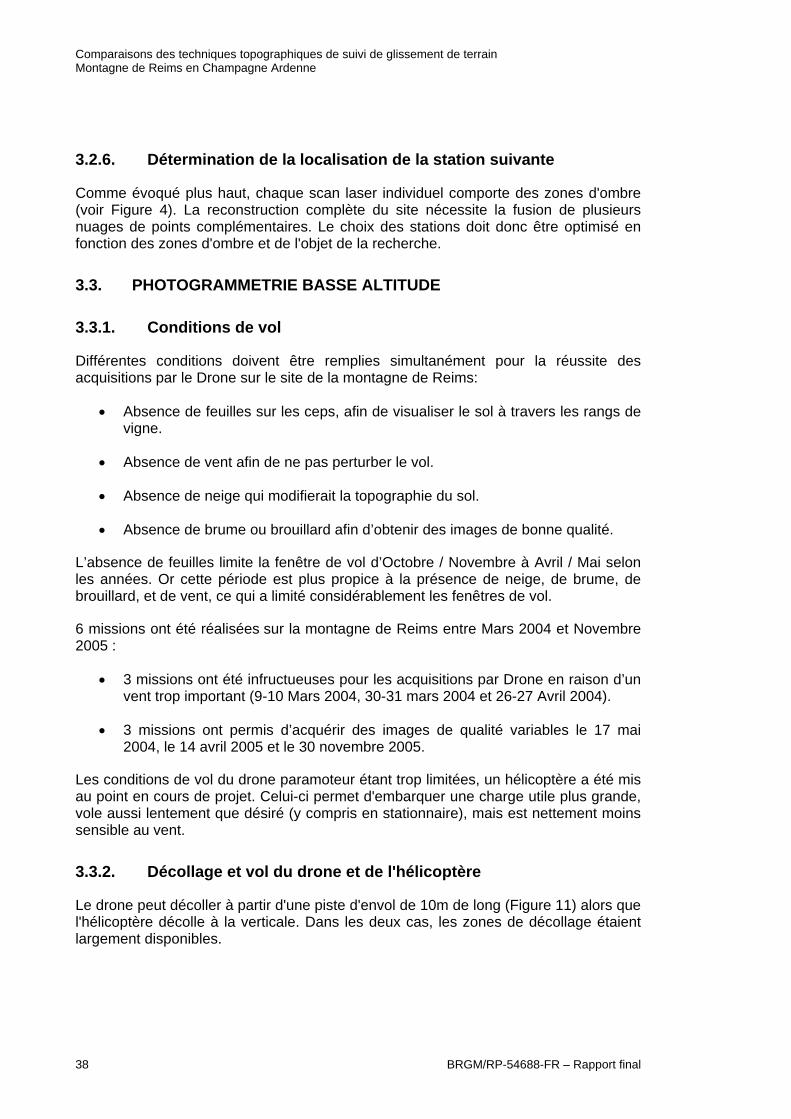
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
38 BRGM/RP-54688-FR – Rapport final
3.2.6. Détermination de la localisation de la station suivante
Comme évoqué plus haut, chaque scan laser individuel comporte des zones d'ombre (voir Figure 4). La reconstruction complète du site nécessite la fusion de plusieurs nuages de points complémentaires. Le choix des stations doit donc être optimisé en fonction des zones d'ombre et de l'objet de la recherche.
3.3. PHOTOGRAMMETRIE BASSE ALTITUDE
3.3.1. Conditions de vol
Différentes conditions doivent être remplies simultanément pour la réussite des acquisitions par le Drone sur le site de la montagne de Reims:
• Absence de feuilles sur les ceps, afin de visualiser le sol à travers les rangs de vigne.
• Absence de vent afin de ne pas perturber le vol.
• Absence de neige qui modifierait la topographie du sol.
• Absence de brume ou brouillard afin d’obtenir des images de bonne qualité.
L’absence de feuilles limite la fenêtre de vol d’Octobre / Novembre à Avril / Mai selon les années. Or cette période est plus propice à la présence de neige, de brume, de brouillard, et de vent, ce qui a limité considérablement les fenêtres de vol.
6 missions ont été réalisées sur la montagne de Reims entre Mars 2004 et Novembre 2005 :
• 3 missions ont été infructueuses pour les acquisitions par Drone en raison d’un vent trop important (9-10 Mars 2004, 30-31 mars 2004 et 26-27 Avril 2004).
• 3 missions ont permis d’acquérir des images de qualité variables le 17 mai 2004, le 14 avril 2005 et le 30 novembre 2005.
Les conditions de vol du drone paramoteur étant trop limitées, un hélicoptère a été mis au point en cours de projet. Celui-ci permet d'embarquer une charge utile plus grande, vole aussi lentement que désiré (y compris en stationnaire), mais est nettement moins sensible au vent.
3.3.2. Décollage et vol du drone et de l'hélicoptère
Le drone peut décoller à partir d'une piste d'envol de 10m de long (Figure 11) alors que l'hélicoptère décolle à la verticale. Dans les deux cas, les zones de décollage étaient largement disponibles.
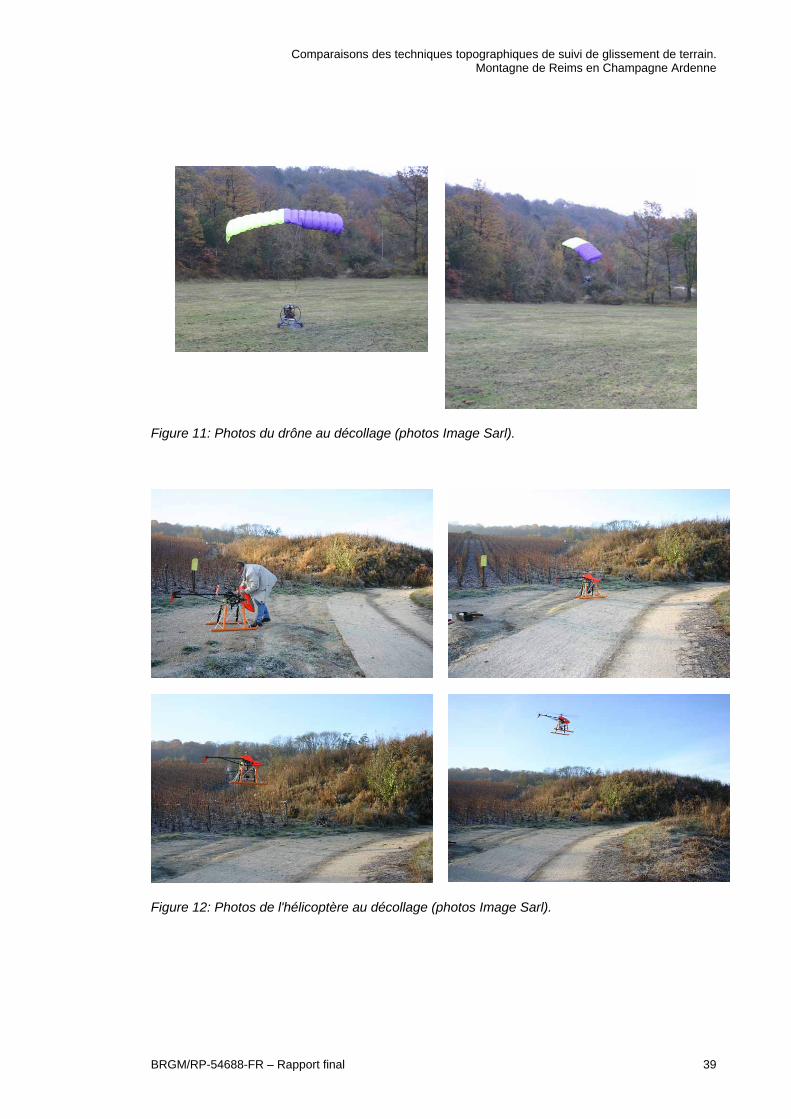
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 39
Figure 11: Photos du drône au décollage (photos Image Sarl).
Figure 12: Photos de l'hélicoptère au décollage (photos Image Sarl).
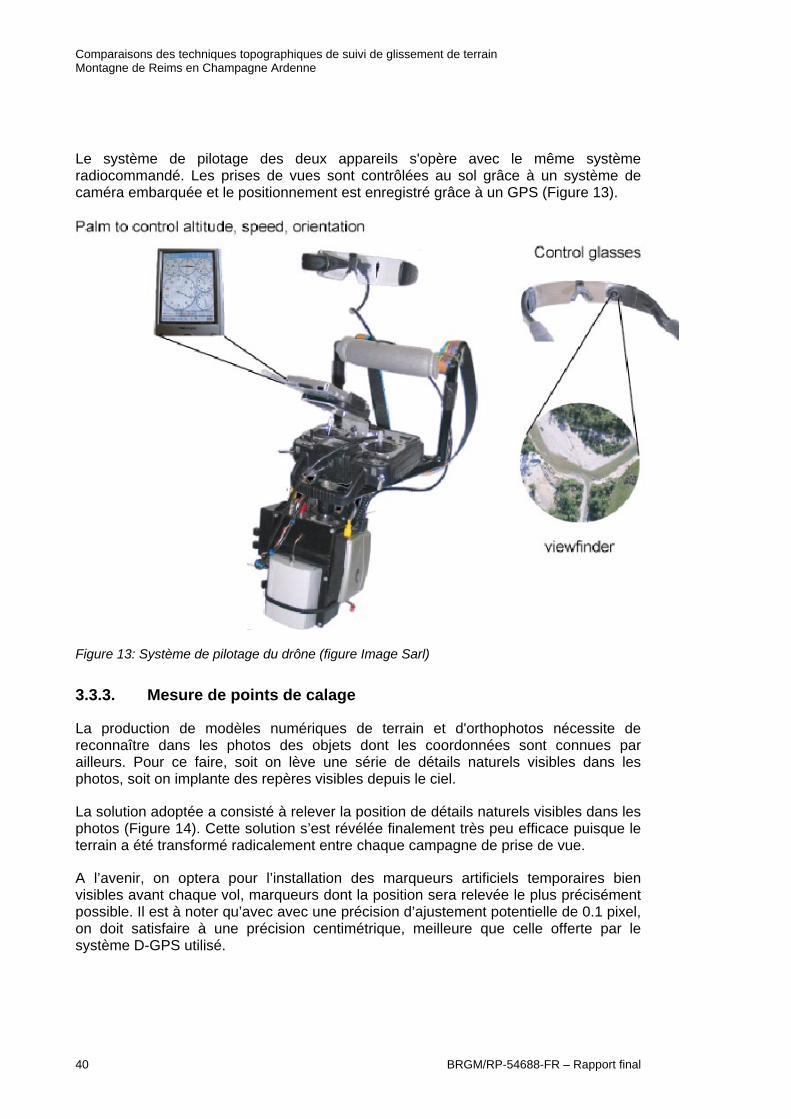
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
40 BRGM/RP-54688-FR – Rapport final
Le système de pilotage des deux appareils s'opère avec le même système radiocommandé. Les prises de vues sont contrôlées au sol grâce à un système de caméra embarquée et le positionnement est enregistré grâce à un GPS (Figure 13).
Figure 13: Système de pilotage du drône (figure Image Sarl)
3.3.3. Mesure de points de calage
La production de modèles numériques de terrain et d'orthophotos nécessite de reconnaître dans les photos des objets dont les coordonnées sont connues par ailleurs. Pour ce faire, soit on lève une série de détails naturels visibles dans les photos, soit on implante des repères visibles depuis le ciel.
La solution adoptée a consisté à relever la position de détails naturels visibles dans les photos (Figure 14). Cette solution s’est révélée finalement très peu efficace puisque le terrain a été transformé radicalement entre chaque campagne de prise de vue.
A l’avenir, on optera pour l’installation des marqueurs artificiels temporaires bien visibles avant chaque vol, marqueurs dont la position sera relevée le plus précisément possible. Il est à noter qu’avec avec une précision d’ajustement potentielle de 0.1 pixel, on doit satisfaire à une précision centimétrique, meilleure que celle offerte par le système D-GPS utilisé.
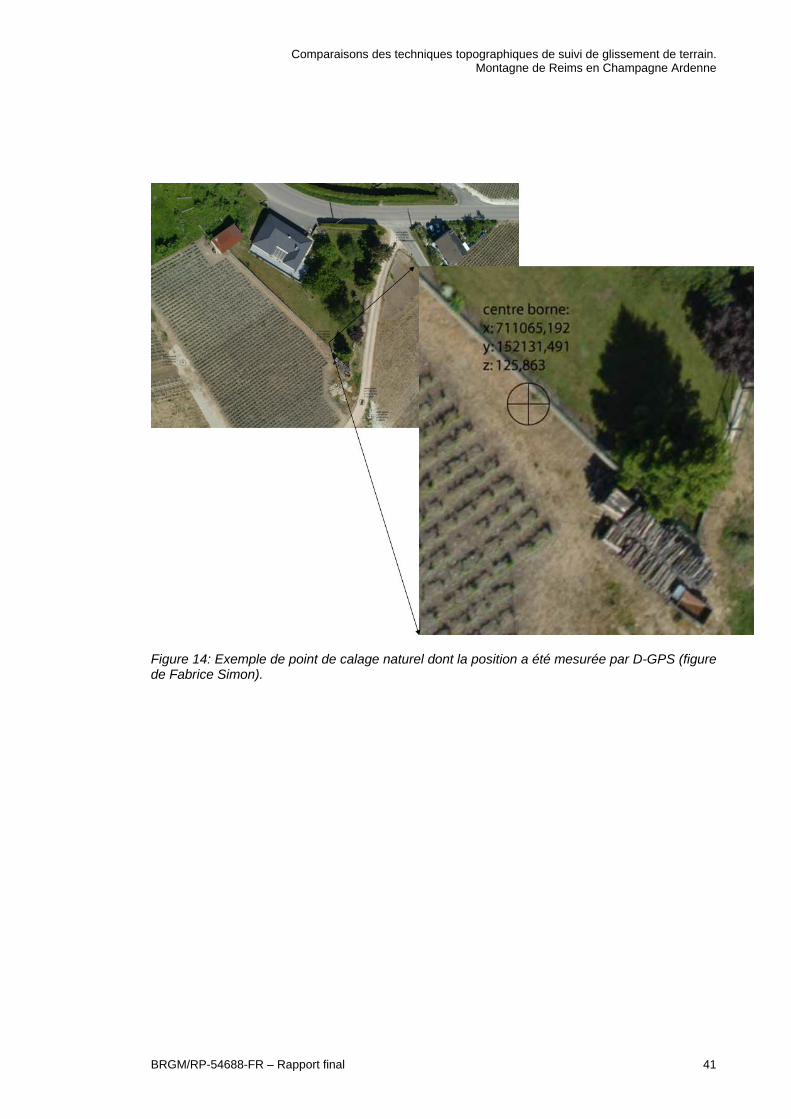
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 41
Figure 14: Exemple de point de calage naturel dont la position a été mesurée par D-GPS (figure de Fabrice Simon).

Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 43
4. Principe de spatialisation et de comparaison des données multi-temporelles
D'une manière générale, la détection d'un mouvement du terrain suppose de connaître la forme du terrain à un instant T et de mesurer à nouveau ce même terrain à un instant T+1. La différence de position donne alors un déplacement, aux erreurs de mesure près.
La connaissance de la forme du terrain a été acquise par des techniques de mesure essentiellement ponctuelles. Donc pour conclure à un déplacement, il faut impérativement occuper deux fois les mêmes positions et observer une différence d'altitude. Lorsqu'on ne réoccupe pas exactement les mêmes positions entre deux époques de mesures, on va probablement observer une différence d'altitude mais celle-ci dépend soit de la position de mesure (où l'altitude est un peu différente de celle du point le plus proche), soit réellement une variation due au mouvement de terrain.
Mathématiquement, c'est comme si on réalisait deux échantillons indépendants de la même topographie. Si le versant restait parfaitement stable et qu'on le mesurait à deux époques distinctes en des positions différentes, on obtiendrait deux jeux de données relativement similaires mais pas tout à fait identiques. La différence cependant devrait simplement être due à la différence d'échantillonnage et à la précision de la mesure.
Si maintenant on suppose que le versant est susceptible de se déplacer, il convient de caractériser les différences observées et de voir si ces différences sont effectivement plus grandes que les différences attendues du fait du changement de l'échantillon.
Plusieurs méthodes d'interpolation existent pour estimer les écarts entre deux nuages de points. Il existe des méthodes de triangulation et d'interpolation linéaire, des techniques de transformation de données en grilles régulières qui conservent plus ou moins bien les données originales.
Pour l'exploration de très grands jeux de données, l'interpolation linéaire et la triangulation (souvent appelée TIN pour Triangular Irregular Network) et l'interpolation pondérée par l'inverse de la distance sont des techniques faciles à mettre en œuvre et relativement fiable lorsque les données sont très denses. Nous avons appliqué l’interpolation linéaire pour une comparaison qualitative des jeux de données.
Dans le cas de données plus dispersées, et lorsqu'on cherche à obtenir une quantification des déplacements de l'imprécision des estimations, il est nécessaire de recourir au krigeage. Cette méthode d'interpolation est la seule qui permette d'estimer l'imprécision d'une estimation spatiale. Cependant ses conditions d’applications sont assez contraignantes et nous ne l’avons finalement appliquée qu’à un jeu de données test. Nous allons détailler davantage le contenu de la méthode parce qu’elle constitue une solution prometteuse pour des travaux futurs. Par contre, le but du rapport n'est pas d'entrer dans le détail mathématique du krigeage mais d'en exposer les principes.
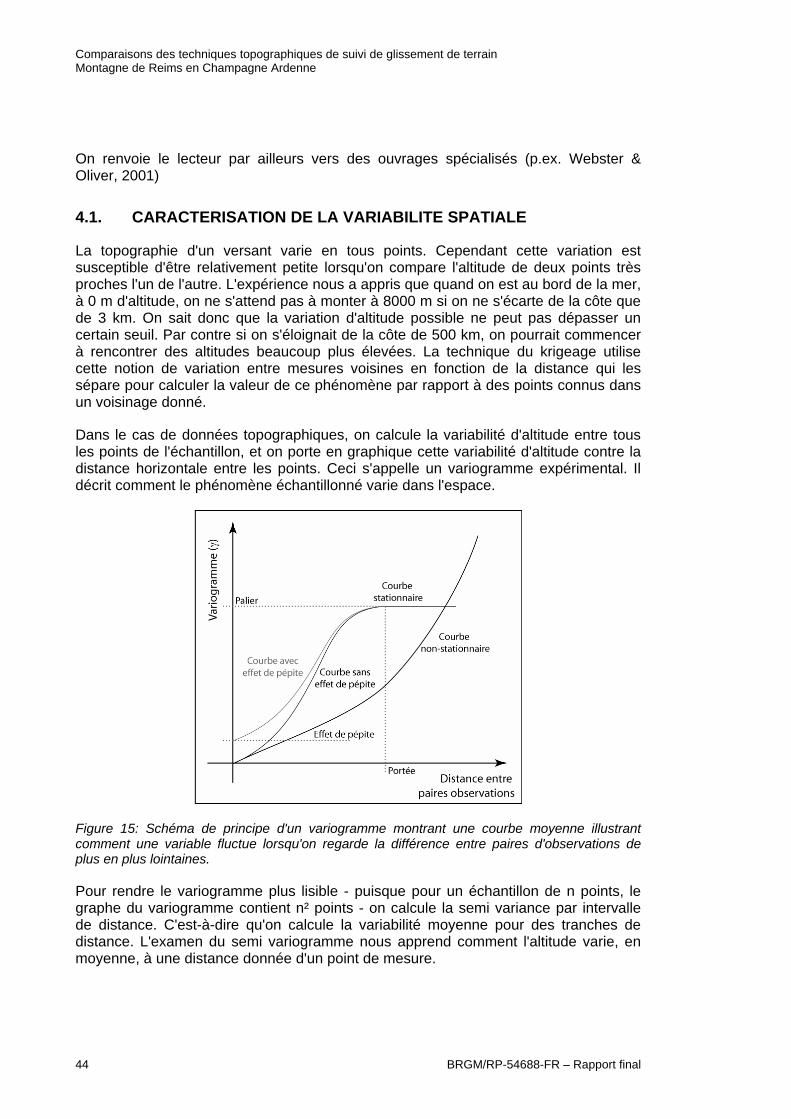
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
44 BRGM/RP-54688-FR – Rapport final
On renvoie le lecteur par ailleurs vers des ouvrages spécialisés (p.ex. Webster & Oliver, 2001)
4.1. CARACTERISATION DE LA VARIABILITE SPATIALE
La topographie d'un versant varie en tous points. Cependant cette variation est susceptible d'être relativement petite lorsqu'on compare l'altitude de deux points très proches l'un de l'autre. L'expérience nous a appris que quand on est au bord de la mer, à 0 m d'altitude, on ne s'attend pas à monter à 8000 m si on ne s'écarte de la côte que de 3 km. On sait donc que la variation d'altitude possible ne peut pas dépasser un certain seuil. Par contre si on s'éloignait de la côte de 500 km, on pourrait commencer à rencontrer des altitudes beaucoup plus élevées. La technique du krigeage utilise cette notion de variation entre mesures voisines en fonction de la distance qui les sépare pour calculer la valeur de ce phénomène par rapport à des points connus dans un voisinage donné.
Dans le cas de données topographiques, on calcule la variabilité d'altitude entre tous les points de l'échantillon, et on porte en graphique cette variabilité d'altitude contre la distance horizontale entre les points. Ceci s'appelle un variogramme expérimental. Il décrit comment le phénomène échantillonné varie dans l'espace.
Figure 15: Schéma de principe d'un variogramme montrant une courbe moyenne illustrant comment une variable fluctue lorsqu'on regarde la différence entre paires d'observations de plus en plus lointaines.
Pour rendre le variogramme plus lisible - puisque pour un échantillon de n points, le graphe du variogramme contient n² points - on calcule la semi variance par intervalle de distance. C'est-à-dire qu'on calcule la variabilité moyenne pour des tranches de distance. L'examen du semi variogramme nous apprend comment l'altitude varie, en moyenne, à une distance donnée d'un point de mesure.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 45
La courbe du variogramme expérimental est susceptible de montrer trois caractéristiques importantes: un effet de pépite, un palier et une portée (Figure 15).
L'effet de pépite est l'intersection de la courbe du variogramme avec l'axe des ordonnées. Cet effet décrit la variabilité intrinsèque des points de mesure, c'est-à-dire, comment la valeur varie si on mesure plusieurs fois le même point. Cet effet traduit en général la précision de la mesure.
La portée et le palier sont associés. La portée est la distance à partir de laquelle la variabilité cesse d'augmenter (Figure 15). Au-delà de cette distance critique, il ne sert à rien de prendre en compte les points de données puisqu'ils n'apportent pas plus d'information nouvelle. Le palier est le niveau de variabilité atteint à la distance de portée. Lorsque le variogramme présente un palier, on dit que le phénomène spatial est stationnaire à partir de la distance égale à la portée.
On essaiera autant que possible de travailler avec des données produisant un variogramme stationnaire c’est-à-dire avec une portée et un palier. Si cela n'est pas le cas, le variogramme présente une dérive qui n'est pas souhaitable (Figure 15). Elle signifie que les points situés à très grande distance du point considéré peuvent encore avoir une influence sur sa valeur. La dérive d’un variogramme peut se produit lorsque les points se trouvent sur un terrain pentu. Pour s’en affranchir, on soustrait alors la pente générale du terrain et on modélise ensuite le variogramme des résidus.
Concrètement, on ajuste une surface de tendance polynomiale par moindres carrés aux observations et on observe ensuite la variabilité de l'écart entre la surface de tendance et le point d'observation. C'est cette technique de transformation qui a été adoptée pour les données GPS de Champillon (voir annexe 1).
4.2. AJUSTEMENT D'UNE FONCTION ANALYTIQUE AU VARIOGRAMME
Lorsque le variogramme expérimental présente un palier, on essaie de le modéliser, c'est-à-dire d'y ajuster une fonction mathématique qui permette de prédire la variabilité quelle que soit la distance donnée.
Habituellement, l'ajustement de la fonction mathématique se fait par estimation visuelle sur le variogramme. On choisit une fonction qui s'ajuste au mieux au variogramme expérimental, c'est-à-dire que l'écart entre la courbe mathématique ajustée et celle du variogramme expérimental reste petit tout au long du graphique.
4.3. ESTIMATION DES ALTITUDES
L'estimation des altitudes avec la méthode de krigeage est en réalité la moyenne des altitudes des points voisins pondérées par la distance à laquelle les voisins se trouvent. Le calcul des poids des observations est inversement proportionnel à la distance entre le point à estimer et le point connu. La fonction de décroissance du poids d'un point correspond à la fonction analytique ajustée au variogramme expérimental.
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
46 BRGM/RP-54688-FR – Rapport final
Il est clair que le poids d'un point éloigné est limité et n'influencera que très peu l'estimation d'altitude.
4.4. ESTIMATION DES INCERTITUDES
Le krigeage présente l'avantage de quantifier le degré de fiabilité des mesures. Il existe plusieurs informations qui peuvent être déduites du variogramme et de la fonction de krigeage: l'écart type de krigeage et la validation croisée permettent d'évaluer la qualité des estimations.
4.4.1. Ecart-type de krigeage
L'écart-type de krigeage mesure l'incertitude de l'estimation d'un point telle qu'elle résulte de la somme des poids des points qui ont servi à l'estimer. Les poids sont une fonction de la distance et de la variabilité à une distance donnée. On connaît ainsi en chaque point calculé la fiabilité du calcul.
4.4.2. Validation croisée
La validation croisée consiste à estimer l'altitude d'un point de l'échantillon en fonction de ses voisins, par krigeage, et de comparer cette altitude estimée par krigeage à celle mesurée. Cette méthode permet d'estimer si la fonction analytique ajustée au variogramme expérimental est appropriée pour le calcul auquel on s'est livré et met éventuellement en évidence des phénomènes inattendus.
4.5. COMPARAISON MULTI-TEMPORELLE
La comparaison multi-temporelle s'appuie sur un principe comparable à la validation croisée. Au début de cette section on évoquait le principe sur lequel cette étude s'appuie: les mesures réalisées en T et en T+1 consistent en fait de mesures faite sur un objet identique, sauf s'il s'est déformé.
Si l'échantillon T+1 est réellement identique à l'échantillon T, les altitudes des points T+1 sont statistiquement semblables à celles de T et donc leur variogramme expérimental doit rester identique. En poussant le raisonnement plus loin, on doit pouvoir prédire l'altitude au droit de chacun des points de T+1 en utilisant le variogramme expérimental calculé en T. De cette manière, si l'écart entre l'altitude prédite à T+1 est du même ordre de grandeur que l'écart type de krigeage, le point va être considéré comme étant issu de la même population. Par contre si l'écart entre l'altitude prédite et l'altitude observée diffère grandement, il est probable que le point échantillonné a bien bougé.
4.6. LIMITATIONS DU KRIGEAGE
Le krigeage, malgré ses avantages statistiques indéniables, souffre de deux problèmes critiques. Premièrement, les variations d'altitude très abruptes biaisent le variogramme
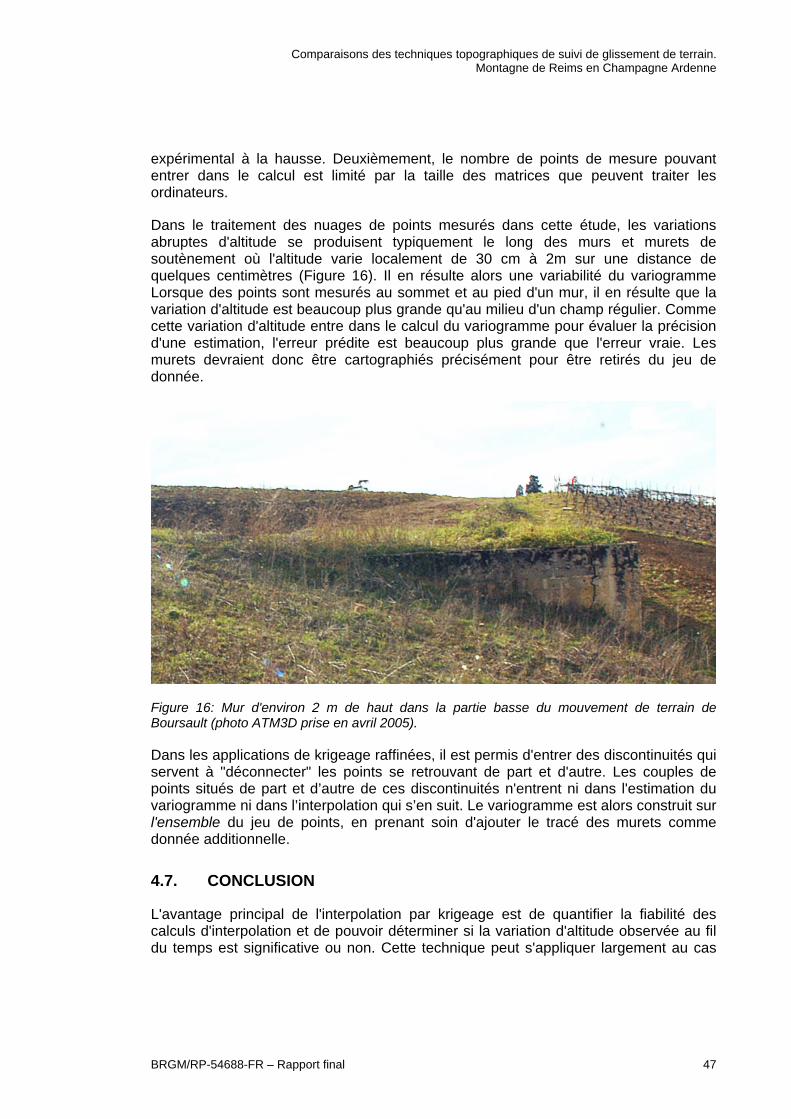
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 47
expérimental à la hausse. Deuxièmement, le nombre de points de mesure pouvant entrer dans le calcul est limité par la taille des matrices que peuvent traiter les ordinateurs.
Dans le traitement des nuages de points mesurés dans cette étude, les variations abruptes d'altitude se produisent typiquement le long des murs et murets de soutènement où l'altitude varie localement de 30 cm à 2m sur une distance de quelques centimètres (Figure 16). Il en résulte alors une variabilité du variogramme Lorsque des points sont mesurés au sommet et au pied d'un mur, il en résulte que la variation d'altitude est beaucoup plus grande qu'au milieu d'un champ régulier. Comme cette variation d'altitude entre dans le calcul du variogramme pour évaluer la précision d'une estimation, l'erreur prédite est beaucoup plus grande que l'erreur vraie. Les murets devraient donc être cartographiés précisément pour être retirés du jeu de donnée.
Figure 16: Mur d'environ 2 m de haut dans la partie basse du mouvement de terrain de Boursault (photo ATM3D prise en avril 2005).
Dans les applications de krigeage raffinées, il est permis d'entrer des discontinuités qui servent à "déconnecter" les points se retrouvant de part et d'autre. Les couples de points situés de part et d’autre de ces discontinuités n'entrent ni dans l'estimation du variogramme ni dans l’interpolation qui s’en suit. Le variogramme est alors construit sur l'ensemble du jeu de points, en prenant soin d'ajouter le tracé des murets comme donnée additionnelle.
4.7. CONCLUSION
L'avantage principal de l'interpolation par krigeage est de quantifier la fiabilité des calculs d'interpolation et de pouvoir déterminer si la variation d'altitude observée au fil du temps est significative ou non. Cette technique peut s'appliquer largement au cas
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
48 BRGM/RP-54688-FR – Rapport final
de Boursault et Champillon, pour autant que les murets de terrassement soient considérés comme des discontinuités et que les points de mesure ne soient pas trop nombreux.
L'adaptation du krigeage aux données multi-temporelles offre l'avantage de déterminer si chaque nouvelle campagne montre des variations supérieures à l'erreur d'interpolation évaluée du sol.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 49
5. Résultats du D-GPS
5.1. METHODOLOGIE
La méthodologie générale suivie pour traiter les données GPS est la suivante :
• Préparation des données;
• Exploration statistique;
• Analyse géostatistique;
• Analyse multi-temporelle.
Les coordonnées des points GPS mesurés sur le terrain sont en coordonnées Lambert Zone I. Pour faciliter l'usage plus large des données, les coordonnées ont été transformées en système Lambert II étendu avec ArcToolbox. L'exactitude des conversions a été validée avec le logiciel Circé de l'Institut Géographique National.
Comme les nuages de points issus des levés contiennent un nombre de points auxiliaires servant à caler géographiquement le levé (p.ex. le point stationné sur le repère local, voir 3.1.2 et 3.1.3), ces points ont été retirés du jeu de données.
L'analyse statistique s’attache à résumer les mesures pour mettre en exergue les caractéristiques du nuage de points et mettre en évidence d'éventuelles erreurs grossières.
L'analyse géostatistique ensuite consiste à évaluer la variabilité spatiale des données de chacun des sites. Cette phase est intéressante à deux titres, d'abord elle permet de connaître la variabilité des données, ensuite, lorsque les variogrammes des époques successives sont comparés on peut vérifier la fiabilité du déplacement détecté.
Cependant, l'analyse géostatistique n'a été appliquée jusqu’à son terme que sur une petite partie du site de Champillon (voir Annexe 1). Des difficultés méthodologiques liées à la présence des murets se sont révélées insolubles dans le temps imparti, l'opération n'a donc pas conduit à une application complète sur Boursault.
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
50 BRGM/RP-54688-FR – Rapport final
5.2. BOURSAULT
5.2.1. Exploration des données brutes
Les histogrammes des mesures montrent que la gamme des altitudes levées est comprise entre 120 et 185 m d'altitude (Figure 17, Figure 18 et Figure 19). Comme les positions mesurées aux trois époques ne sont pas complètement identiques, les histogrammes montrent quelques différences de distribution. Le nuage de point de mars 2004 (Figure 17) couvre la totalité de cette gamme tandis que la campagne de décembre 2005 (Figure 18) s'est essentiellement concentrée sur la partie centrale du glissement. Un plus grand nombre de point y a d'ailleurs été levé. En avril 2005 (Figure 19), la campagne a avorté et n'a couvert de manière extensive que le front du glissement vers les altitudes de 125 à 160 m.
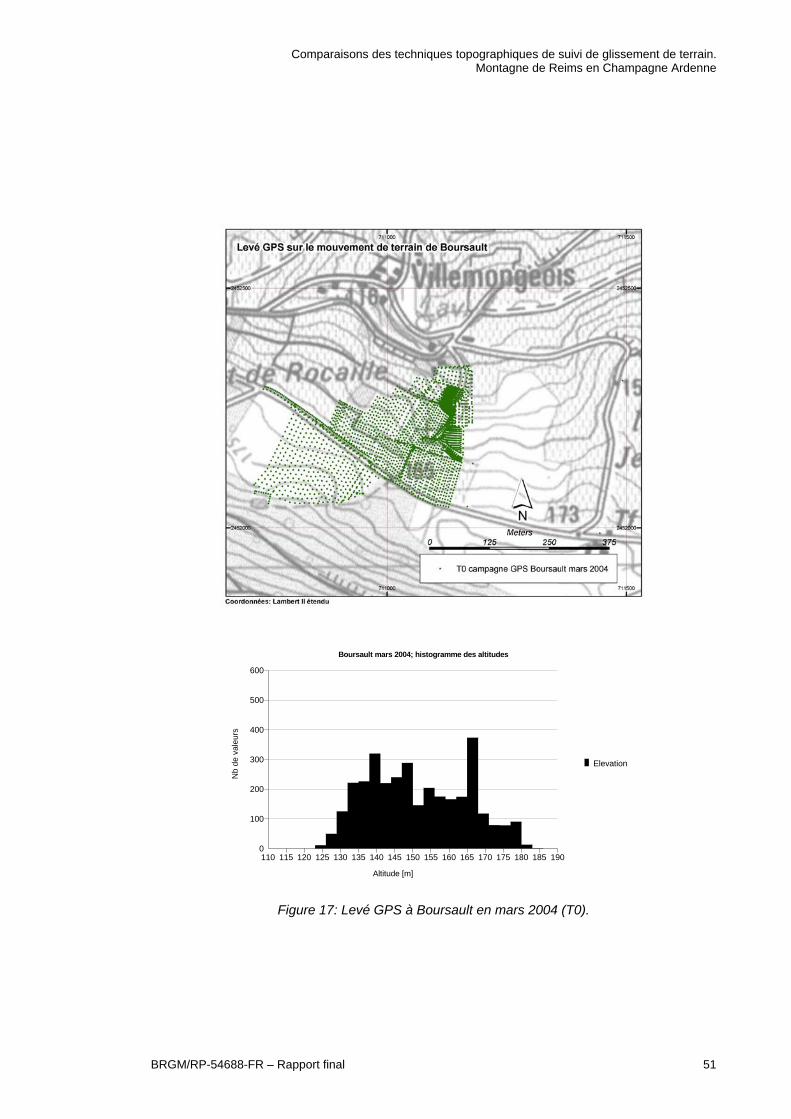
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 51
Boursault mars 2004; histogramme des altitudes
Elevation
Nb
de v
aleu
rs
Altitude [m]
0
100
200
300
400
500
600
110 115 120 125 130 135 140 145 150 155 160 165 170 175 180 185 190
Figure 17: Levé GPS à Boursault en mars 2004 (T0).
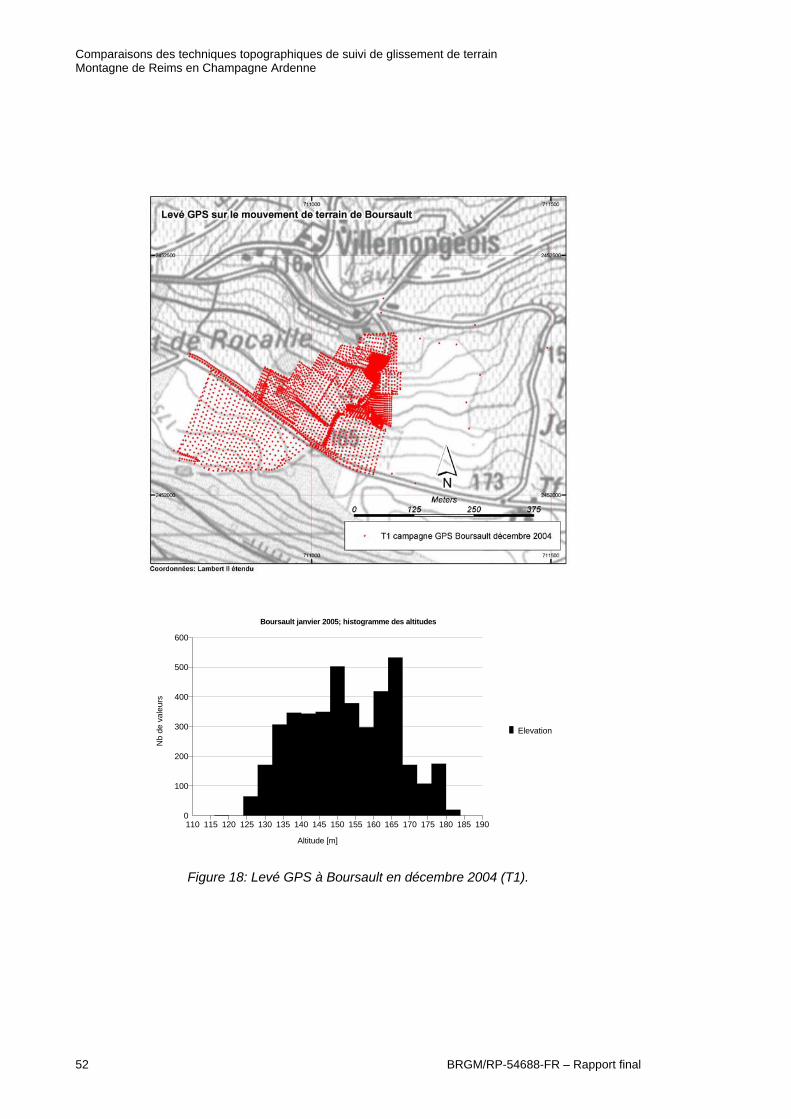
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
52 BRGM/RP-54688-FR – Rapport final
Boursault janvier 2005; histogramme des altitudes
Elevation
Nb
de v
aleu
rs
Altitude [m]
0
100
200
300
400
500
600
110 115 120 125 130 135 140 145 150 155 160 165 170 175 180 185 190
Figure 18: Levé GPS à Boursault en décembre 2004 (T1).
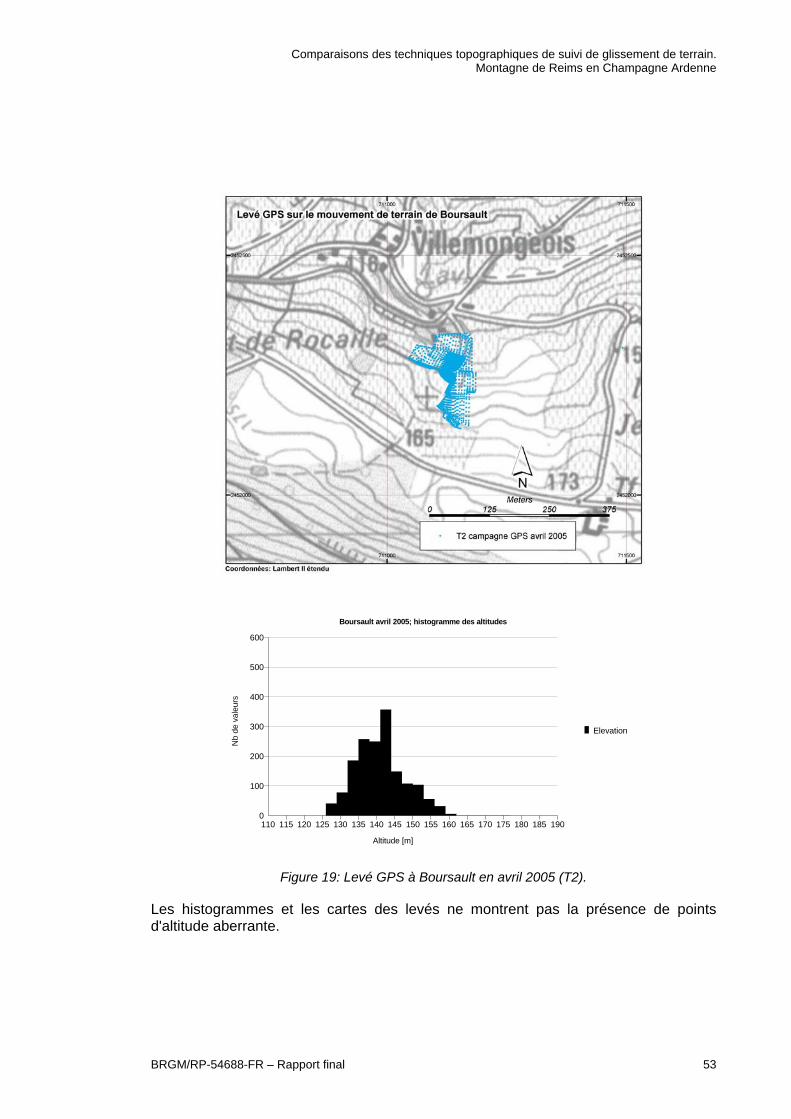
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 53
Boursault avril 2005; histogramme des altitudes
Elevation
Nb
de v
aleu
rs
Altitude [m]
0
100
200
300
400
500
600
110 115 120 125 130 135 140 145 150 155 160 165 170 175 180 185 190
Figure 19: Levé GPS à Boursault en avril 2005 (T2).
Les histogrammes et les cartes des levés ne montrent pas la présence de points d'altitude aberrante.
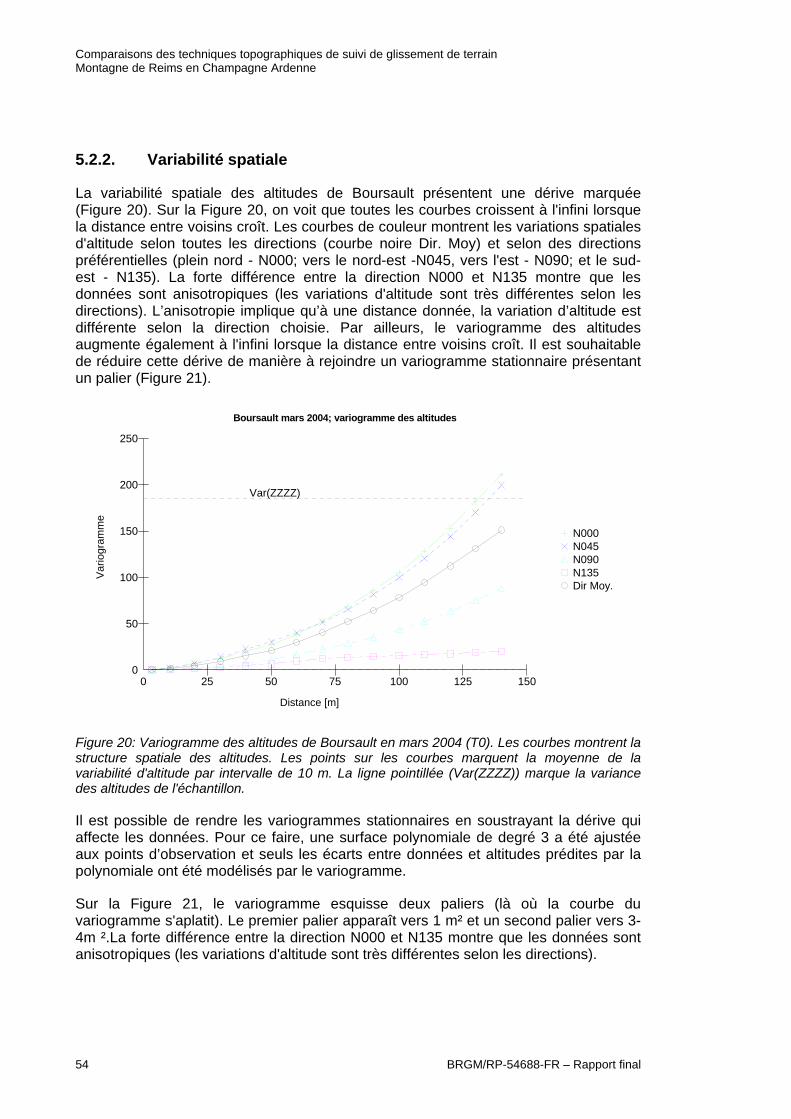
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
54 BRGM/RP-54688-FR – Rapport final
5.2.2. Variabilité spatiale
La variabilité spatiale des altitudes de Boursault présentent une dérive marquée (Figure 20). Sur la Figure 20, on voit que toutes les courbes croissent à l'infini lorsque la distance entre voisins croît. Les courbes de couleur montrent les variations spatiales d'altitude selon toutes les directions (courbe noire Dir. Moy) et selon des directions préférentielles (plein nord - N000; vers le nord-est -N045, vers l'est - N090; et le sud-est - N135). La forte différence entre la direction N000 et N135 montre que les données sont anisotropiques (les variations d'altitude sont très différentes selon les directions). L’anisotropie implique qu’à une distance donnée, la variation d’altitude est différente selon la direction choisie. Par ailleurs, le variogramme des altitudes augmente également à l'infini lorsque la distance entre voisins croît. Il est souhaitable de réduire cette dérive de manière à rejoindre un variogramme stationnaire présentant un palier (Figure 21).
Boursault mars 2004; variogramme des altitudes
N000N045N090N135Dir Moy.
Var
iogr
amm
e
Distance [m]
Var(ZZZZ)
0
50
100
150
200
250
0 25 50 75 100 125 150
Figure 20: Variogramme des altitudes de Boursault en mars 2004 (T0). Les courbes montrent la structure spatiale des altitudes. Les points sur les courbes marquent la moyenne de la variabilité d'altitude par intervalle de 10 m. La ligne pointillée (Var(ZZZZ)) marque la variance des altitudes de l'échantillon.
Il est possible de rendre les variogrammes stationnaires en soustrayant la dérive qui affecte les données. Pour ce faire, une surface polynomiale de degré 3 a été ajustée aux points d’observation et seuls les écarts entre données et altitudes prédites par la polynomiale ont été modélisés par le variogramme.
Sur la Figure 21, le variogramme esquisse deux paliers (là où la courbe du variogramme s'aplatit). Le premier palier apparaît vers 1 m² et un second palier vers 3-4m ².La forte différence entre la direction N000 et N135 montre que les données sont anisotropiques (les variations d'altitude sont très différentes selon les directions).
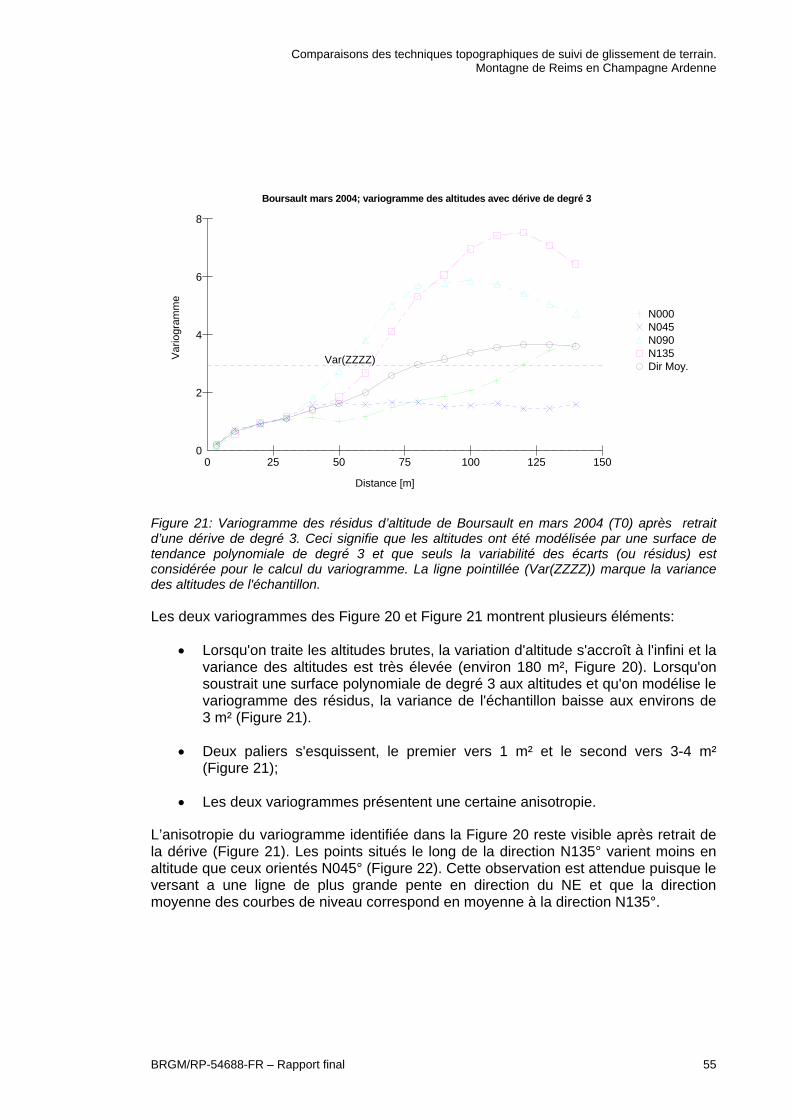
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 55
Boursault mars 2004; variogramme des altitudes avec dérive de degré 3
N000N045N090N135Dir Moy.
Var
iogr
amm
e
Distance [m]
Var(ZZZZ)
0
2
4
6
8
0 25 50 75 100 125 150
Figure 21: Variogramme des résidus d’altitude de Boursault en mars 2004 (T0) après retrait d’une dérive de degré 3. Ceci signifie que les altitudes ont été modélisée par une surface de tendance polynomiale de degré 3 et que seuls la variabilité des écarts (ou résidus) est considérée pour le calcul du variogramme. La ligne pointillée (Var(ZZZZ)) marque la variance des altitudes de l'échantillon.
Les deux variogrammes des Figure 20 et Figure 21 montrent plusieurs éléments:
• Lorsqu'on traite les altitudes brutes, la variation d'altitude s'accroît à l'infini et la variance des altitudes est très élevée (environ 180 m², Figure 20). Lorsqu'on soustrait une surface polynomiale de degré 3 aux altitudes et qu'on modélise le variogramme des résidus, la variance de l'échantillon baisse aux environs de 3 m² (Figure 21).
• Deux paliers s'esquissent, le premier vers 1 m² et le second vers 3-4 m² (Figure 21);
• Les deux variogrammes présentent une certaine anisotropie.
L’anisotropie du variogramme identifiée dans la Figure 20 reste visible après retrait de la dérive (Figure 21). Les points situés le long de la direction N135° varient moins en altitude que ceux orientés N045° (Figure 22). Cette observation est attendue puisque le versant a une ligne de plus grande pente en direction du NE et que la direction moyenne des courbes de niveau correspond en moyenne à la direction N135°.
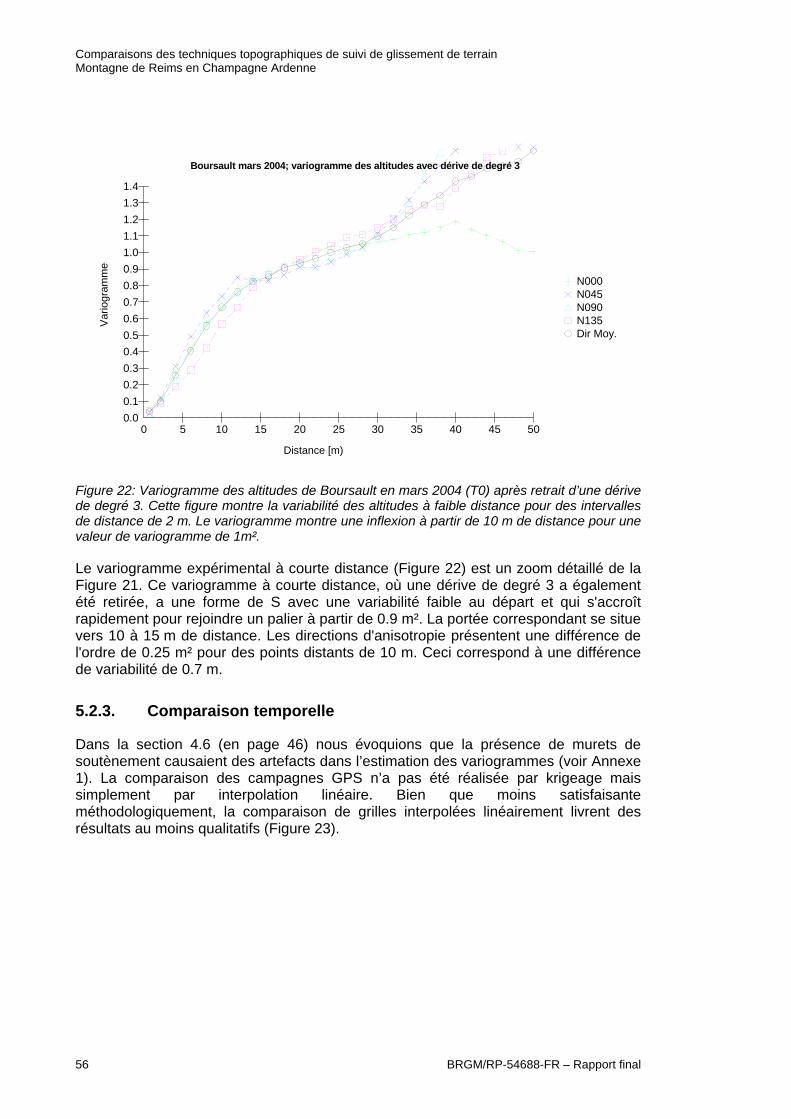
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
56 BRGM/RP-54688-FR – Rapport final
Boursault mars 2004; variogramme des altitudes avec dérive de degré 3
N000N045N090N135Dir Moy.
Var
iogr
amm
e
Distance [m)
0.00.10.20.30.40.50.60.70.80.91.01.11.21.31.4
0 5 10 15 20 25 30 35 40 45 50
Figure 22: Variogramme des altitudes de Boursault en mars 2004 (T0) après retrait d’une dérive de degré 3. Cette figure montre la variabilité des altitudes à faible distance pour des intervalles de distance de 2 m. Le variogramme montre une inflexion à partir de 10 m de distance pour une valeur de variogramme de 1m².
Le variogramme expérimental à courte distance (Figure 22) est un zoom détaillé de la Figure 21. Ce variogramme à courte distance, où une dérive de degré 3 a également été retirée, a une forme de S avec une variabilité faible au départ et qui s'accroît rapidement pour rejoindre un palier à partir de 0.9 m². La portée correspondant se situe vers 10 à 15 m de distance. Les directions d'anisotropie présentent une différence de l'ordre de 0.25 m² pour des points distants de 10 m. Ceci correspond à une différence de variabilité de 0.7 m.
5.2.3. Comparaison temporelle
Dans la section 4.6 (en page 46) nous évoquions que la présence de murets de soutènement causaient des artefacts dans l’estimation des variogrammes (voir Annexe 1). La comparaison des campagnes GPS n’a pas été réalisée par krigeage mais simplement par interpolation linéaire. Bien que moins satisfaisante méthodologiquement, la comparaison de grilles interpolées linéairement livrent des résultats au moins qualitatifs (Figure 23).
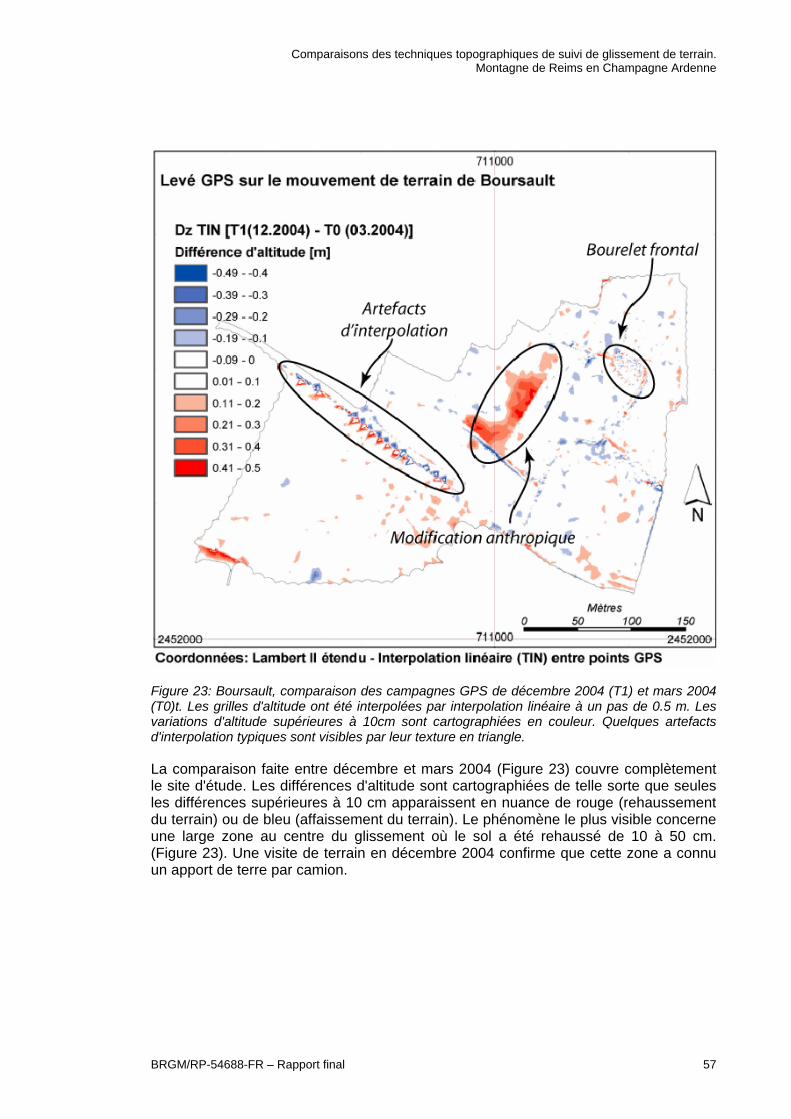
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 57
Figure 23: Boursault, comparaison des campagnes GPS de décembre 2004 (T1) et mars 2004 (T0)t. Les grilles d'altitude ont été interpolées par interpolation linéaire à un pas de 0.5 m. Les variations d'altitude supérieures à 10cm sont cartographiées en couleur. Quelques artefacts d'interpolation typiques sont visibles par leur texture en triangle.
La comparaison faite entre décembre et mars 2004 (Figure 23) couvre complètement le site d'étude. Les différences d'altitude sont cartographiées de telle sorte que seules les différences supérieures à 10 cm apparaissent en nuance de rouge (rehaussement du terrain) ou de bleu (affaissement du terrain). Le phénomène le plus visible concerne une large zone au centre du glissement où le sol a été rehaussé de 10 à 50 cm. (Figure 23). Une visite de terrain en décembre 2004 confirme que cette zone a connu un apport de terre par camion.
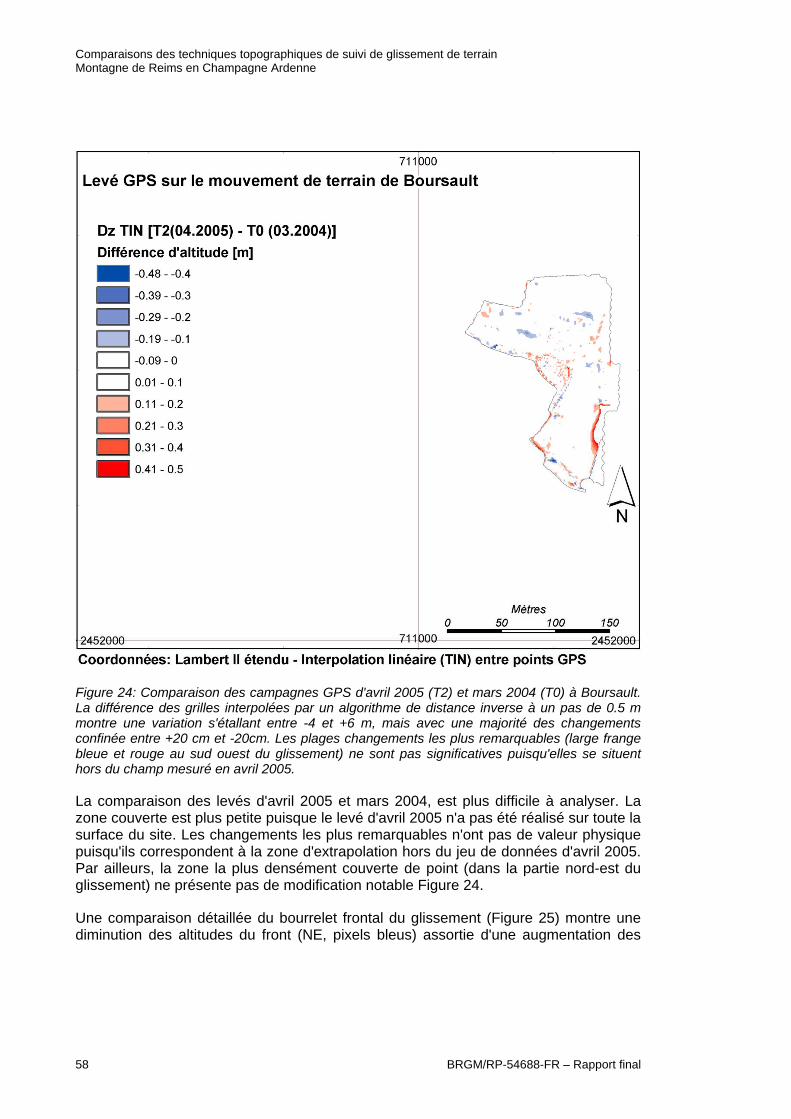
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
58 BRGM/RP-54688-FR – Rapport final
Figure 24: Comparaison des campagnes GPS d'avril 2005 (T2) et mars 2004 (T0) à Boursault. La différence des grilles interpolées par un algorithme de distance inverse à un pas de 0.5 m montre une variation s'étallant entre -4 et +6 m, mais avec une majorité des changements confinée entre +20 cm et -20cm. Les plages changements les plus remarquables (large frange bleue et rouge au sud ouest du glissement) ne sont pas significatives puisqu'elles se situent hors du champ mesuré en avril 2005.
La comparaison des levés d'avril 2005 et mars 2004, est plus difficile à analyser. La zone couverte est plus petite puisque le levé d'avril 2005 n'a pas été réalisé sur toute la surface du site. Les changements les plus remarquables n'ont pas de valeur physique puisqu'ils correspondent à la zone d'extrapolation hors du jeu de données d'avril 2005. Par ailleurs, la zone la plus densément couverte de point (dans la partie nord-est du glissement) ne présente pas de modification notable Figure 24.
Une comparaison détaillée du bourrelet frontal du glissement (Figure 25) montre une diminution des altitudes du front (NE, pixels bleus) assortie d'une augmentation des
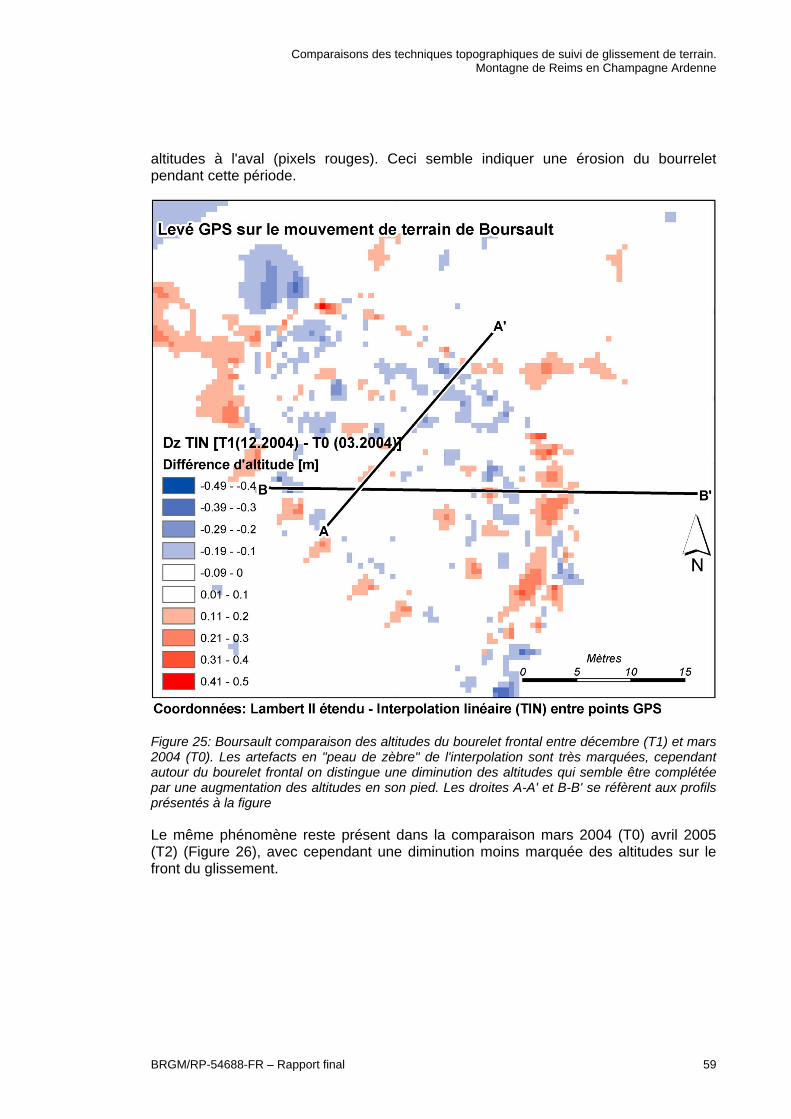
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 59
altitudes à l'aval (pixels rouges). Ceci semble indiquer une érosion du bourrelet pendant cette période.
Figure 25: Boursault comparaison des altitudes du bourelet frontal entre décembre (T1) et mars 2004 (T0). Les artefacts en "peau de zèbre" de l'interpolation sont très marquées, cependant autour du bourelet frontal on distingue une diminution des altitudes qui semble être complétée par une augmentation des altitudes en son pied. Les droites A-A' et B-B' se réfèrent aux profils présentés à la figure
Le même phénomène reste présent dans la comparaison mars 2004 (T0) avril 2005 (T2) (Figure 26), avec cependant une diminution moins marquée des altitudes sur le front du glissement.
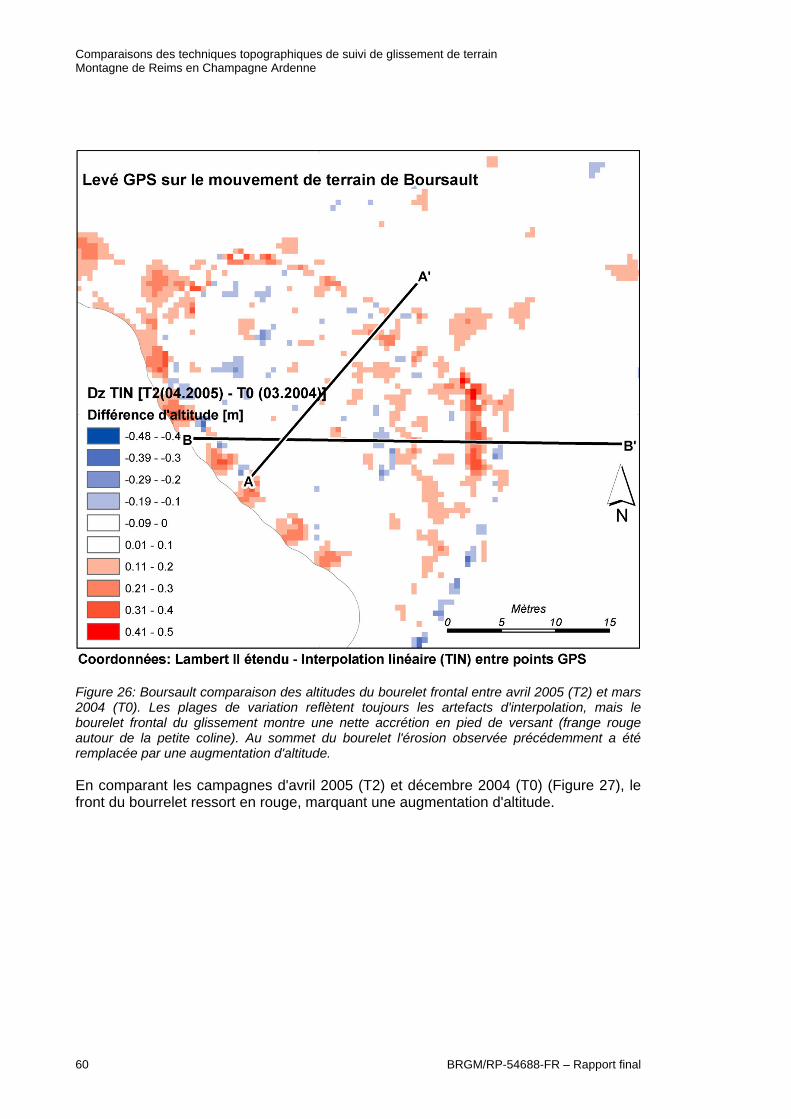
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
60 BRGM/RP-54688-FR – Rapport final
Figure 26: Boursault comparaison des altitudes du bourelet frontal entre avril 2005 (T2) et mars 2004 (T0). Les plages de variation reflètent toujours les artefacts d'interpolation, mais le bourelet frontal du glissement montre une nette accrétion en pied de versant (frange rouge autour de la petite coline). Au sommet du bourelet l'érosion observée précédemment a été remplacée par une augmentation d'altitude.
En comparant les campagnes d'avril 2005 (T2) et décembre 2004 (T0) (Figure 27), le front du bourrelet ressort en rouge, marquant une augmentation d'altitude.
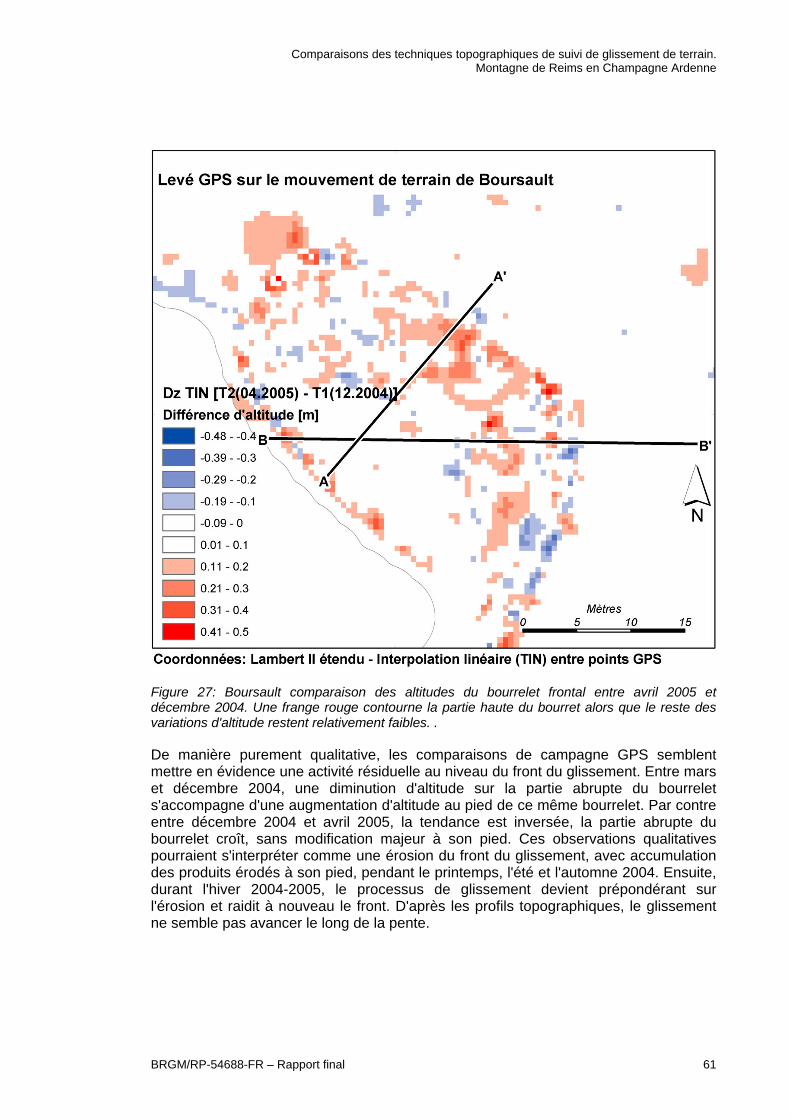
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 61
Figure 27: Boursault comparaison des altitudes du bourrelet frontal entre avril 2005 et décembre 2004. Une frange rouge contourne la partie haute du bourret alors que le reste des variations d'altitude restent relativement faibles. .
De manière purement qualitative, les comparaisons de campagne GPS semblent mettre en évidence une activité résiduelle au niveau du front du glissement. Entre mars et décembre 2004, une diminution d'altitude sur la partie abrupte du bourrelet s'accompagne d'une augmentation d'altitude au pied de ce même bourrelet. Par contre entre décembre 2004 et avril 2005, la tendance est inversée, la partie abrupte du bourrelet croît, sans modification majeur à son pied. Ces observations qualitatives pourraient s'interpréter comme une érosion du front du glissement, avec accumulation des produits érodés à son pied, pendant le printemps, l'été et l'automne 2004. Ensuite, durant l'hiver 2004-2005, le processus de glissement devient prépondérant sur l'érosion et raidit à nouveau le front. D'après les profils topographiques, le glissement ne semble pas avancer le long de la pente.
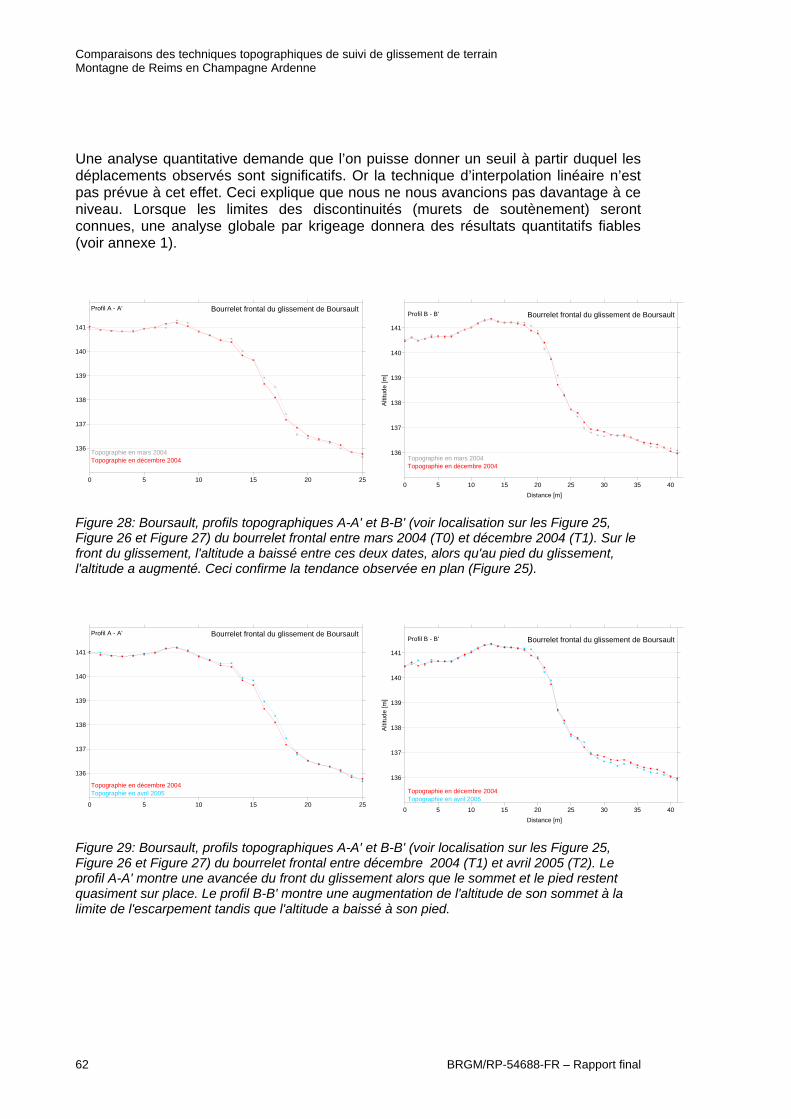
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
62 BRGM/RP-54688-FR – Rapport final
Une analyse quantitative demande que l’on puisse donner un seuil à partir duquel les déplacements observés sont significatifs. Or la technique d’interpolation linéaire n’est pas prévue à cet effet. Ceci explique que nous ne nous avancions pas davantage à ce niveau. Lorsque les limites des discontinuités (murets de soutènement) seront connues, une analyse globale par krigeage donnera des résultats quantitatifs fiables (voir annexe 1).
0 5 10 15 20 25
136
137
138
139
140
141
Bourrelet frontal du glissement de Boursault Profil A - A'
Topographie en mars 2004Topographie en décembre 2004
0 5 10 15 20 25 30 35 40Distance [m]
136
137
138
139
140
141
Alti
tude
[m]
Bourrelet frontal du glissement de Boursault Profil B - B'
Topographie en décembre 2004Topographie en mars 2004
Figure 28: Boursault, profils topographiques A-A' et B-B' (voir localisation sur les Figure 25, Figure 26 et Figure 27) du bourrelet frontal entre mars 2004 (T0) et décembre 2004 (T1). Sur le front du glissement, l'altitude a baissé entre ces deux dates, alors qu'au pied du glissement, l'altitude a augmenté. Ceci confirme la tendance observée en plan (Figure 25).
0 5 10 15 20 25
136
137
138
139
140
141
Bourrelet frontal du glissement de Boursault Profil A - A'
Topographie en décembre 2004Topographie en avril 2005
0 5 10 15 20 25 30 35 40Distance [m]
136
137
138
139
140
141
Alti
tude
[m]
Bourrelet frontal du glissement de Boursault Profil B - B'
Topographie en avril 2005Topographie en décembre 2004
Figure 29: Boursault, profils topographiques A-A' et B-B' (voir localisation sur les Figure 25, Figure 26 et Figure 27) du bourrelet frontal entre décembre 2004 (T1) et avril 2005 (T2). Le profil A-A' montre une avancée du front du glissement alors que le sommet et le pied restent quasiment sur place. Le profil B-B' montre une augmentation de l'altitude de son sommet à la limite de l'escarpement tandis que l'altitude a baissé à son pied.
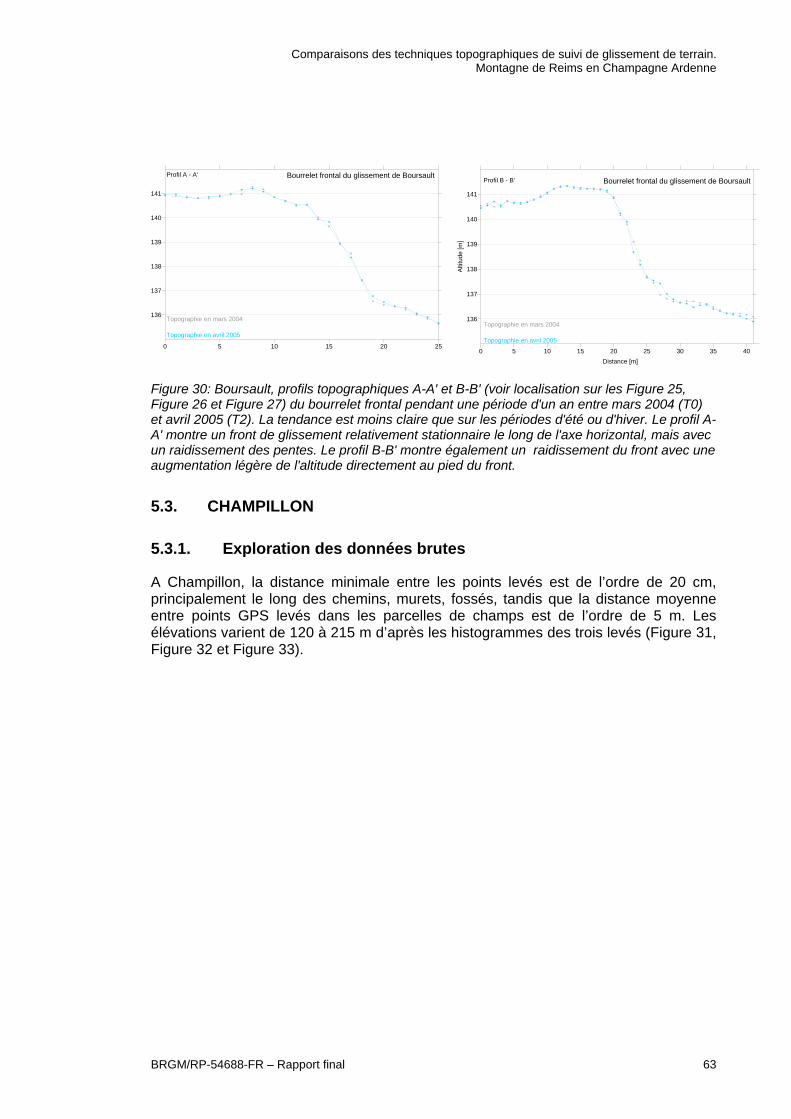
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 63
0 5 10 15 20 25
136
137
138
139
140
141
Bourrelet frontal du glissement de Boursault Profil A - A'
Topographie en mars 2004
Topographie en avril 2005
0 5 10 15 20 25 30 35 40Distance [m]
136
137
138
139
140
141
Alti
tude
[m]
Bourrelet frontal du glissement de Boursault Profil B - B'
Topographie en avril 2005
Topographie en mars 2004
Figure 30: Boursault, profils topographiques A-A' et B-B' (voir localisation sur les Figure 25, Figure 26 et Figure 27) du bourrelet frontal pendant une période d'un an entre mars 2004 (T0) et avril 2005 (T2). La tendance est moins claire que sur les périodes d'été ou d'hiver. Le profil A-A' montre un front de glissement relativement stationnaire le long de l'axe horizontal, mais avec un raidissement des pentes. Le profil B-B' montre également un raidissement du front avec une augmentation légère de l'altitude directement au pied du front.
5.3. CHAMPILLON
5.3.1. Exploration des données brutes
A Champillon, la distance minimale entre les points levés est de l’ordre de 20 cm, principalement le long des chemins, murets, fossés, tandis que la distance moyenne entre points GPS levés dans les parcelles de champs est de l’ordre de 5 m. Les élévations varient de 120 à 215 m d’après les histogrammes des trois levés (Figure 31, Figure 32 et Figure 33).
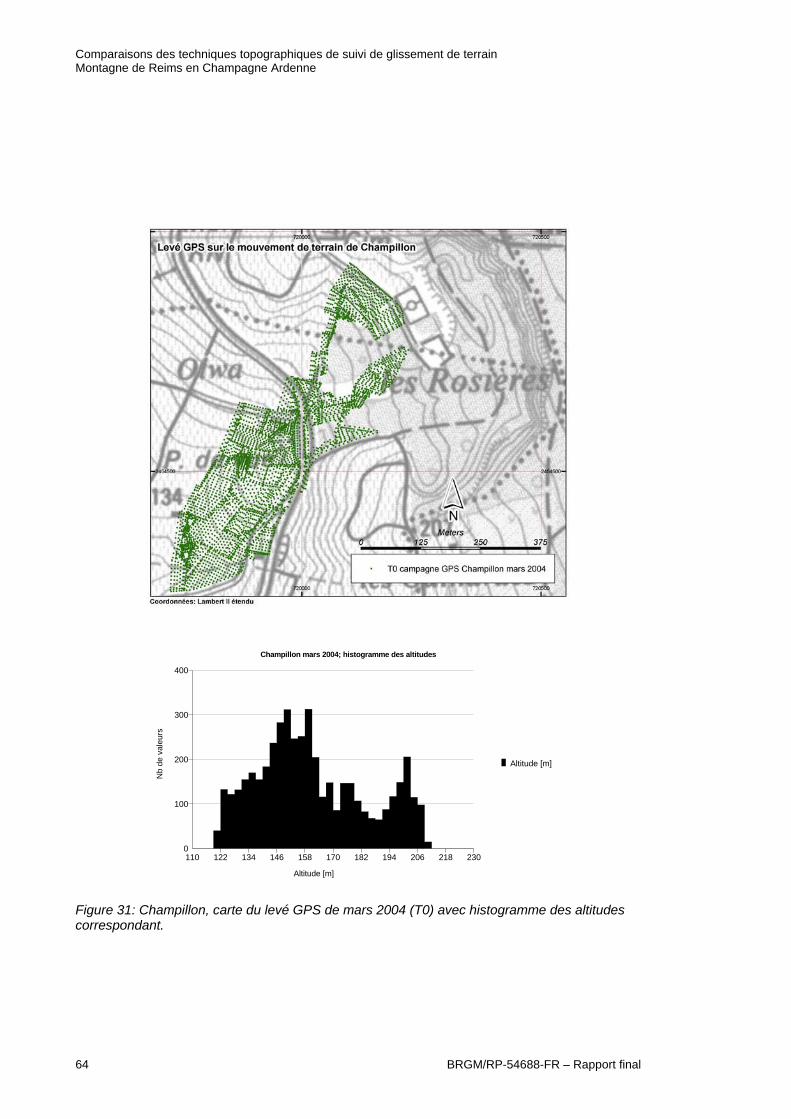
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
64 BRGM/RP-54688-FR – Rapport final
Champillon mars 2004; histogramme des altitudes
Altitude [m]
Nb
de v
aleu
rs
Altitude [m]
0
100
200
300
400
110 122 134 146 158 170 182 194 206 218 230
Figure 31: Champillon, carte du levé GPS de mars 2004 (T0) avec histogramme des altitudes correspondant.
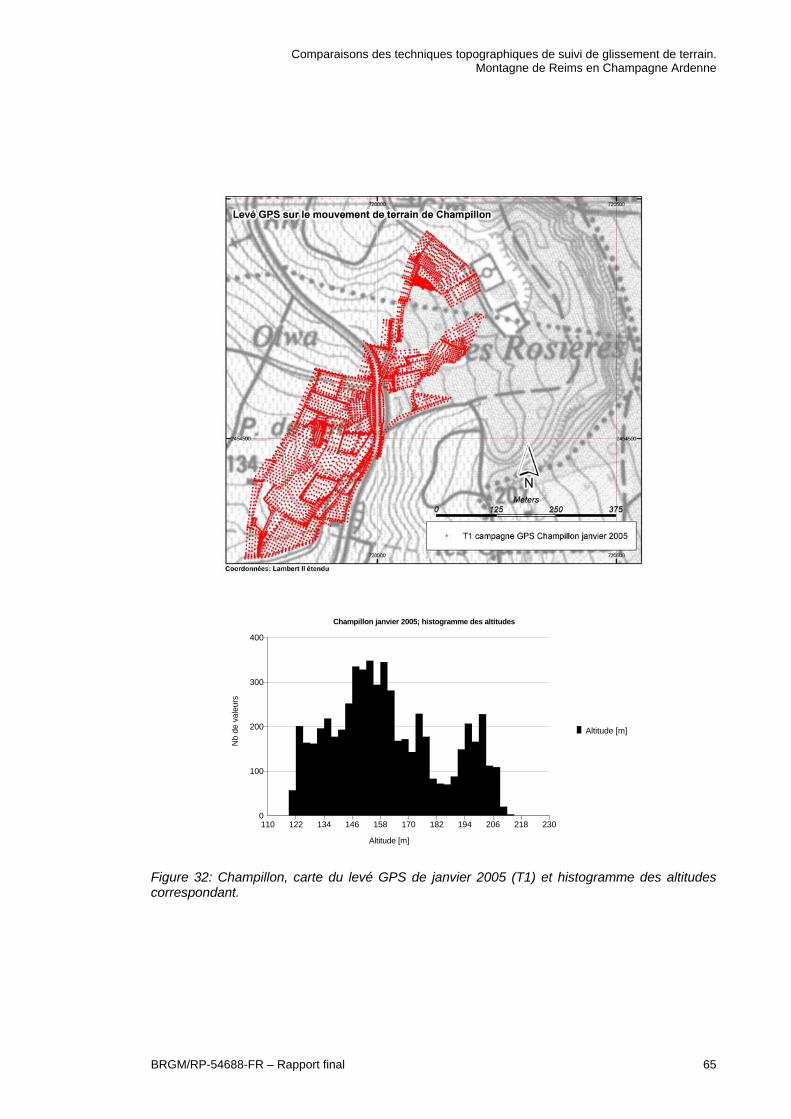
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 65
Champillon janvier 2005; histogramme des altitudes
Altitude [m]
Nb
de v
aleu
rs
Altitude [m]
0
100
200
300
400
110 122 134 146 158 170 182 194 206 218 230
Figure 32: Champillon, carte du levé GPS de janvier 2005 (T1) et histogramme des altitudes correspondant.
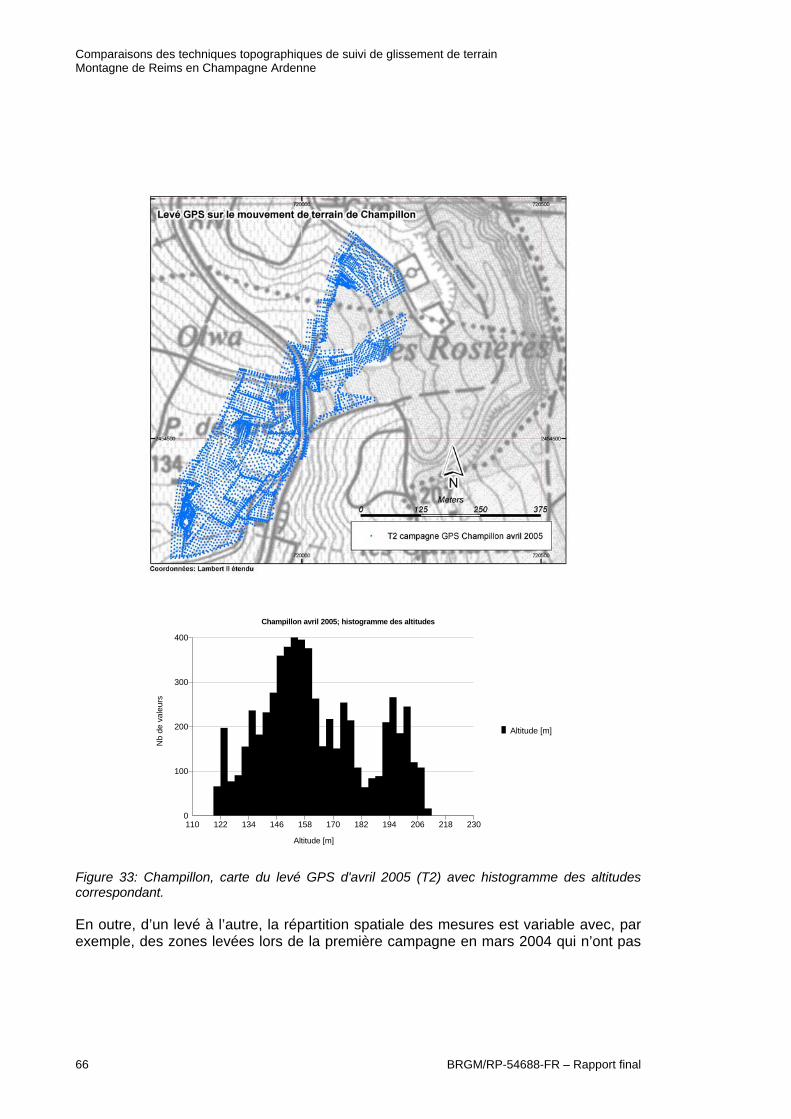
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
66 BRGM/RP-54688-FR – Rapport final
Champillon avril 2005; histogramme des altitudes
Altitude [m]
Nb
de v
aleu
rs
Altitude [m]
0
100
200
300
400
110 122 134 146 158 170 182 194 206 218 230
Figure 33: Champillon, carte du levé GPS d'avril 2005 (T2) avec histogramme des altitudes correspondant.
En outre, d’un levé à l’autre, la répartition spatiale des mesures est variable avec, par exemple, des zones levées lors de la première campagne en mars 2004 qui n’ont pas
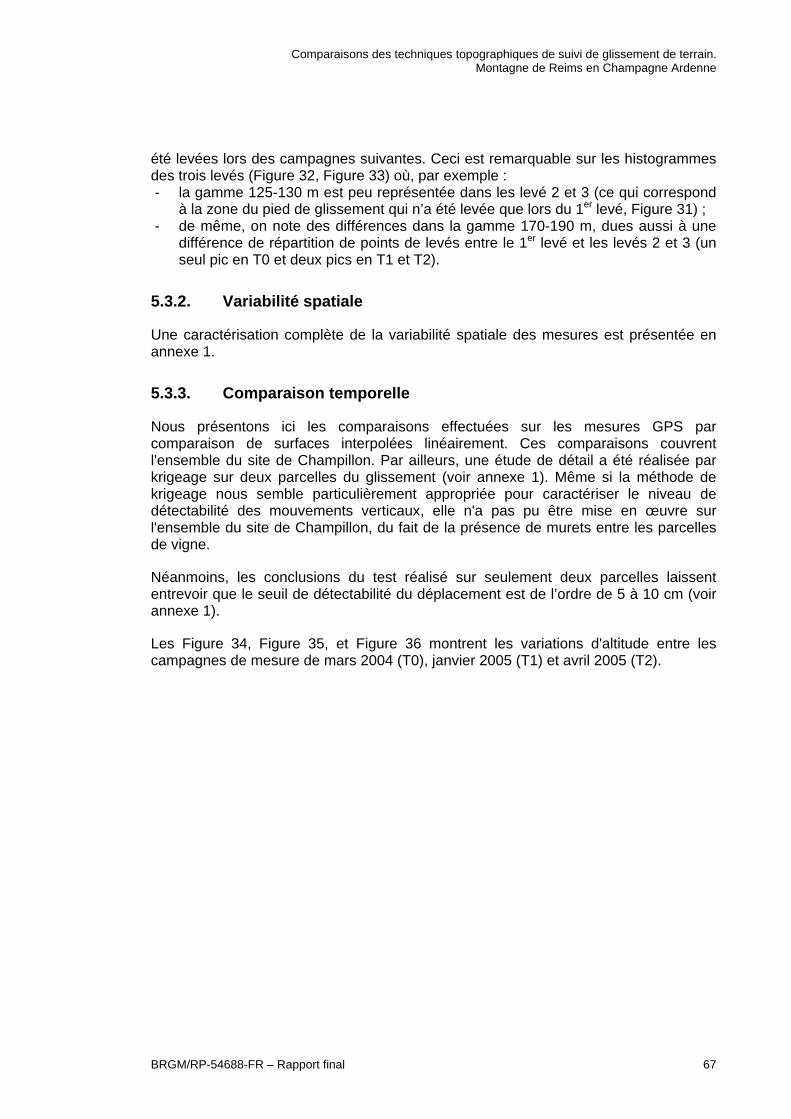
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 67
été levées lors des campagnes suivantes. Ceci est remarquable sur les histogrammes des trois levés (Figure 32, Figure 33) où, par exemple : - la gamme 125-130 m est peu représentée dans les levé 2 et 3 (ce qui correspond
à la zone du pied de glissement qui n’a été levée que lors du 1er levé, Figure 31) ; - de même, on note des différences dans la gamme 170-190 m, dues aussi à une
différence de répartition de points de levés entre le 1er levé et les levés 2 et 3 (un seul pic en T0 et deux pics en T1 et T2).
5.3.2. Variabilité spatiale
Une caractérisation complète de la variabilité spatiale des mesures est présentée en annexe 1.
5.3.3. Comparaison temporelle
Nous présentons ici les comparaisons effectuées sur les mesures GPS par comparaison de surfaces interpolées linéairement. Ces comparaisons couvrent l'ensemble du site de Champillon. Par ailleurs, une étude de détail a été réalisée par krigeage sur deux parcelles du glissement (voir annexe 1). Même si la méthode de krigeage nous semble particulièrement appropriée pour caractériser le niveau de détectabilité des mouvements verticaux, elle n'a pas pu être mise en œuvre sur l'ensemble du site de Champillon, du fait de la présence de murets entre les parcelles de vigne.
Néanmoins, les conclusions du test réalisé sur seulement deux parcelles laissent entrevoir que le seuil de détectabilité du déplacement est de l’ordre de 5 à 10 cm (voir annexe 1).
Les Figure 34, Figure 35, et Figure 36 montrent les variations d'altitude entre les campagnes de mesure de mars 2004 (T0), janvier 2005 (T1) et avril 2005 (T2).
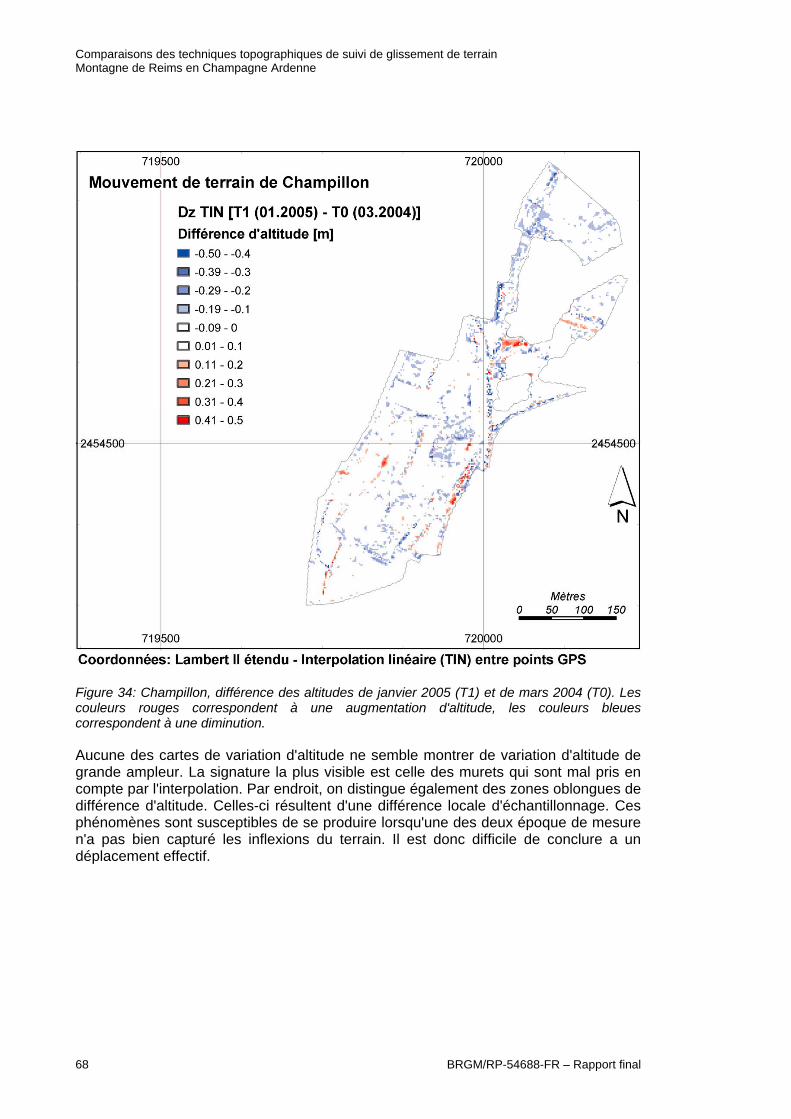
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
68 BRGM/RP-54688-FR – Rapport final
Figure 34: Champillon, différence des altitudes de janvier 2005 (T1) et de mars 2004 (T0). Les couleurs rouges correspondent à une augmentation d'altitude, les couleurs bleues correspondent à une diminution.
Aucune des cartes de variation d'altitude ne semble montrer de variation d'altitude de grande ampleur. La signature la plus visible est celle des murets qui sont mal pris en compte par l'interpolation. Par endroit, on distingue également des zones oblongues de différence d'altitude. Celles-ci résultent d'une différence locale d'échantillonnage. Ces phénomènes sont susceptibles de se produire lorsqu'une des deux époque de mesure n'a pas bien capturé les inflexions du terrain. Il est donc difficile de conclure a un déplacement effectif.
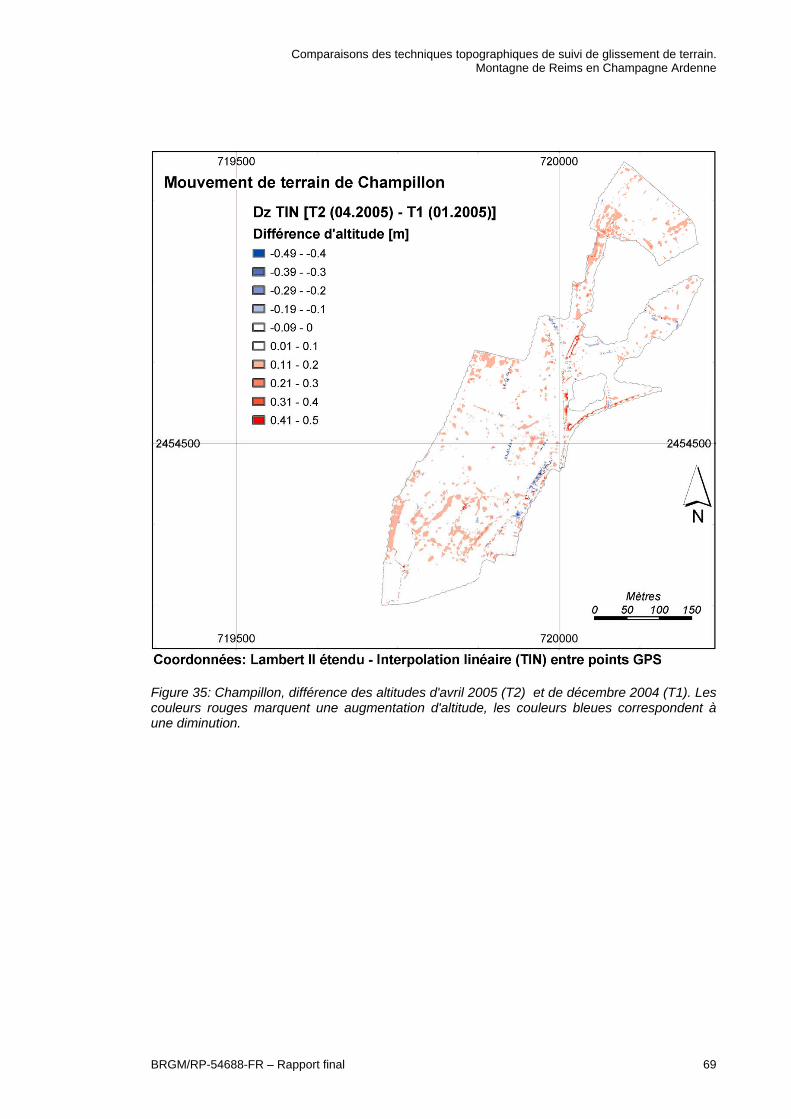
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 69
Figure 35: Champillon, différence des altitudes d'avril 2005 (T2) et de décembre 2004 (T1). Les couleurs rouges marquent une augmentation d'altitude, les couleurs bleues correspondent à une diminution.
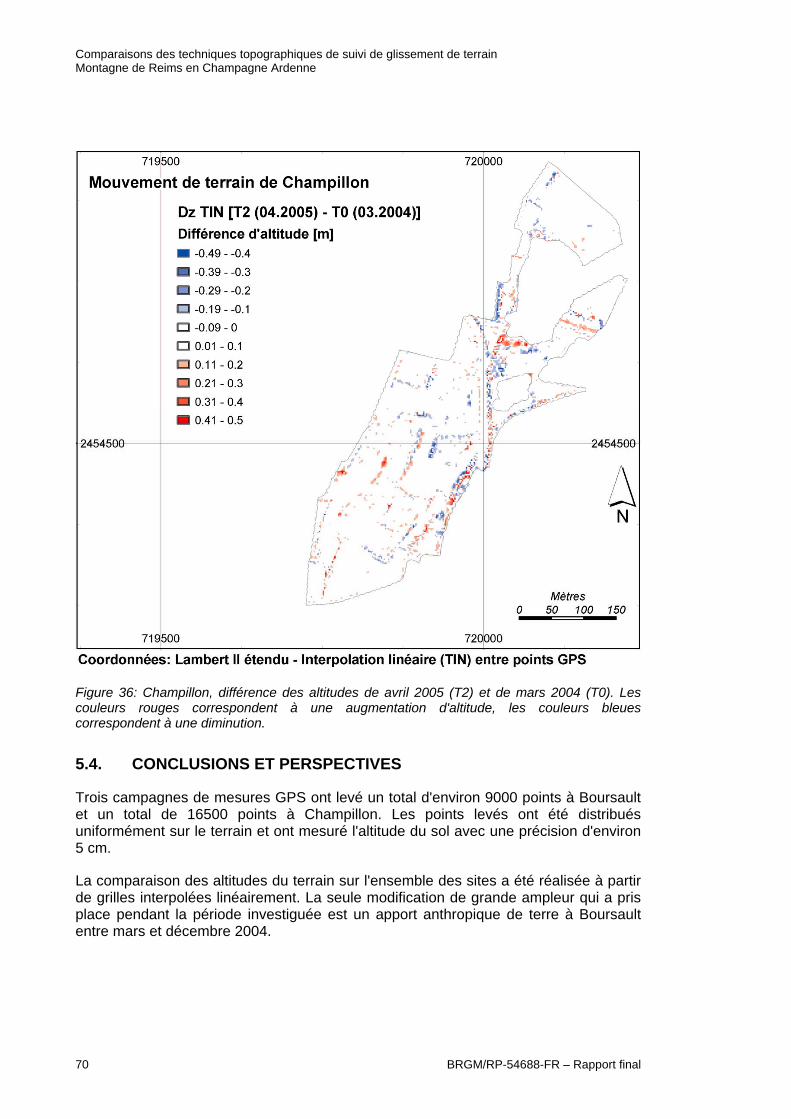
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
70 BRGM/RP-54688-FR – Rapport final
Figure 36: Champillon, différence des altitudes de avril 2005 (T2) et de mars 2004 (T0). Les couleurs rouges correspondent à une augmentation d'altitude, les couleurs bleues correspondent à une diminution.
5.4. CONCLUSIONS ET PERSPECTIVES
Trois campagnes de mesures GPS ont levé un total d'environ 9000 points à Boursault et un total de 16500 points à Champillon. Les points levés ont été distribués uniformément sur le terrain et ont mesuré l'altitude du sol avec une précision d'environ 5 cm.
La comparaison des altitudes du terrain sur l'ensemble des sites a été réalisée à partir de grilles interpolées linéairement. La seule modification de grande ampleur qui a pris place pendant la période investiguée est un apport anthropique de terre à Boursault entre mars et décembre 2004.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 71
D'autres modifications beaucoup ténues ont été observées sur le front du glissement à Boursault. Elles ont une grandeur maximale de 40 cm sur quelques points. Elles semblent traduire une érosion du front du glissement suivie d'une légère croissance.
A Champillon, le champ de modification observé ne permet pas non plus de conclure à des mouvements de grande ampleur du glissement.
La sècheresse relative observée durant toute la période des levés est susceptible d'expliquer l'absence de mouvement de grande ampleur du sol.

Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 73
6. Résultats du scanner laser
6.1. ALGORITHME DE DECIMATION DES DONNEES
Un des avantages fondamentaux de la technologie laser est de fournir une très grande quantité de données en échantillonnant l'espace très densément. L'inconvénient associé à cet avantage, cependant, c'est qu'une grande quantité des points mesurés n'est d'aucun usage pour le suivi topographique des mouvements de terrain. Les points qui ont touché les fils électriques, les arbres ou les piquets et fils de vigne ne servent absolument pas à définir la topographie et doivent être filtrés hors du jeu de données. D'autre part, pour un rendu visuel efficace, il n'est pas forcément utile de disposer d'une telle densité de points. L'objet de cette section est de présenter la méthode de réduction point telle qu'elle a été développée et testée pour cette étude.
Il faut noter cependant que la technique présentée a été testée uniquement sur une campagne de terrain, celle d'avril 2005 à Champillon. Ceci s'explique par le long développement d'un algorithme et le manque d'une chaîne de traitement efficace. Les résultats présentés sont néanmoins prometteurs.
La méthode mise au point pour décimer les points laser s'appuie sur une assertion: les points ayant l'altitude la plus faible sont probablement ceux qui sont le plus proche du sol. L'objectif est donc de fabriquer un filtre ne retenant que les points les plus bas au sein d'une trame régulière. Le résultat est un fichier de coordonnées de points reproduisant aussi fidèlement que possible la topographie.
Pour chaque site et chaque époque, nous avons produit entre 12 et 16 scans laser (Tableau 7) lors de 4 campagnes d’acquisition laser, conduisant à un total d'environ 130 millions de points de données possibles. En pratique le nombre de points de données est un peu moins élevé puisqu'une fraction seulement des rayons laser a été réfléchi par un objet dans un rayon inférieur à 1000 m. Néanmoins, la réduction des données s'impose.
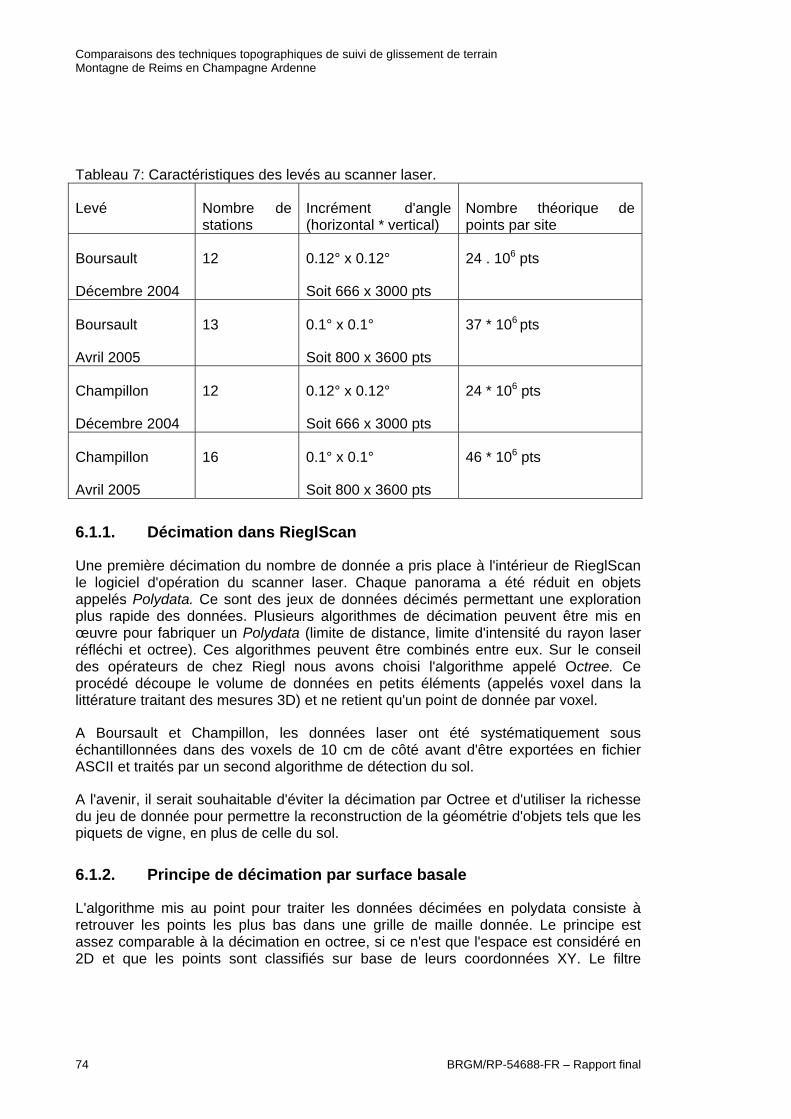
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
74 BRGM/RP-54688-FR – Rapport final
Tableau 7: Caractéristiques des levés au scanner laser.
Levé Nombre de stations
Incrément d'angle (horizontal * vertical)
Nombre théorique de points par site
Boursault
Décembre 2004
12 0.12° x 0.12°
Soit 666 x 3000 pts
24 . 106 pts
Boursault
Avril 2005
13 0.1° x 0.1°
Soit 800 x 3600 pts
37 * 106 pts
Champillon
Décembre 2004
12 0.12° x 0.12°
Soit 666 x 3000 pts
24 * 106 pts
Champillon
Avril 2005
16 0.1° x 0.1°
Soit 800 x 3600 pts
46 * 106 pts
6.1.1. Décimation dans RieglScan
Une première décimation du nombre de donnée a pris place à l'intérieur de RieglScan le logiciel d'opération du scanner laser. Chaque panorama a été réduit en objets appelés Polydata. Ce sont des jeux de données décimés permettant une exploration plus rapide des données. Plusieurs algorithmes de décimation peuvent être mis en œuvre pour fabriquer un Polydata (limite de distance, limite d'intensité du rayon laser réfléchi et octree). Ces algorithmes peuvent être combinés entre eux. Sur le conseil des opérateurs de chez Riegl nous avons choisi l'algorithme appelé Octree. Ce procédé découpe le volume de données en petits éléments (appelés voxel dans la littérature traitant des mesures 3D) et ne retient qu'un point de donnée par voxel.
A Boursault et Champillon, les données laser ont été systématiquement sous échantillonnées dans des voxels de 10 cm de côté avant d'être exportées en fichier ASCII et traités par un second algorithme de détection du sol.
A l'avenir, il serait souhaitable d'éviter la décimation par Octree et d'utiliser la richesse du jeu de donnée pour permettre la reconstruction de la géométrie d'objets tels que les piquets de vigne, en plus de celle du sol.
6.1.2. Principe de décimation par surface basale
L'algorithme mis au point pour traiter les données décimées en polydata consiste à retrouver les points les plus bas dans une grille de maille donnée. Le principe est assez comparable à la décimation en octree, si ce n'est que l'espace est considéré en 2D et que les points sont classifiés sur base de leurs coordonnées XY. Le filtre
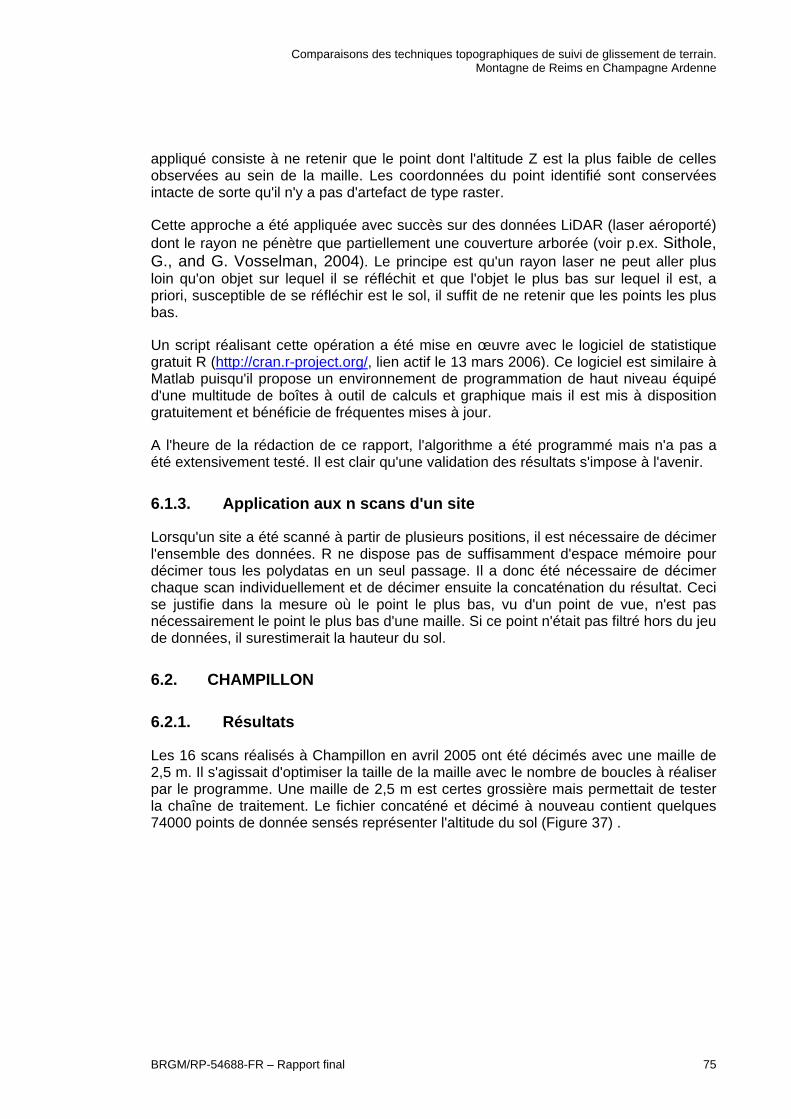
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 75
appliqué consiste à ne retenir que le point dont l'altitude Z est la plus faible de celles observées au sein de la maille. Les coordonnées du point identifié sont conservées intacte de sorte qu'il n'y a pas d'artefact de type raster.
Cette approche a été appliquée avec succès sur des données LiDAR (laser aéroporté) dont le rayon ne pénètre que partiellement une couverture arborée (voir p.ex. Sithole, G., and G. Vosselman, 2004). Le principe est qu'un rayon laser ne peut aller plus loin qu'on objet sur lequel il se réfléchit et que l'objet le plus bas sur lequel il est, a priori, susceptible de se réfléchir est le sol, il suffit de ne retenir que les points les plus bas.
Un script réalisant cette opération a été mise en œuvre avec le logiciel de statistique gratuit R (http://cran.r-project.org/, lien actif le 13 mars 2006). Ce logiciel est similaire à Matlab puisqu'il propose un environnement de programmation de haut niveau équipé d'une multitude de boîtes à outil de calculs et graphique mais il est mis à disposition gratuitement et bénéficie de fréquentes mises à jour.
A l'heure de la rédaction de ce rapport, l'algorithme a été programmé mais n'a pas a été extensivement testé. Il est clair qu'une validation des résultats s'impose à l'avenir.
6.1.3. Application aux n scans d'un site
Lorsqu'un site a été scanné à partir de plusieurs positions, il est nécessaire de décimer l'ensemble des données. R ne dispose pas de suffisamment d'espace mémoire pour décimer tous les polydatas en un seul passage. Il a donc été nécessaire de décimer chaque scan individuellement et de décimer ensuite la concaténation du résultat. Ceci se justifie dans la mesure où le point le plus bas, vu d'un point de vue, n'est pas nécessairement le point le plus bas d'une maille. Si ce point n'était pas filtré hors du jeu de données, il surestimerait la hauteur du sol.
6.2. CHAMPILLON
6.2.1. Résultats
Les 16 scans réalisés à Champillon en avril 2005 ont été décimés avec une maille de 2,5 m. Il s'agissait d'optimiser la taille de la maille avec le nombre de boucles à réaliser par le programme. Une maille de 2,5 m est certes grossière mais permettait de tester la chaîne de traitement. Le fichier concaténé et décimé à nouveau contient quelques 74000 points de donnée sensés représenter l'altitude du sol (Figure 37) .
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
76 BRGM/RP-54688-FR – Rapport final
Figure 37: Champillon, modèle numérique de terrain mesuré par laser terrestre interpolé par réseau de triangles irréguliers. Le polygone aux couleurs plus foncées représente la zone couverte par les mesures GPS. Les points laser sur lesquels le MNT a été construit sont distants au plus de 2.5 m. L'effort de mesure a été porté essentiellement sur la partie médiane du glissement où quelques 13 stations (triangles jaunes) ont été réalisées.
A partir d'un nuage de point, il est possible de créer un MNT par interpolation sur base de réseaux irréguliers de triangles (Figure 37).
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 77
6.2.2. Comparaison avec données GPS
Le MNT laser construit sur base d'un réseau de triangles irréguliers (TIN) a été comparé au levé GPS d'avril 2005. Comme les époques de mesures sont séparées que de quelques jours et que le glissement ne semble pas actif, on peut faire l'hypothèse que les altitudes GPS d'avril 2005 représentent la hauteur vraie du sol. On a donc comparé l'altitude prédite au droit des points GPS dans le MNT laser, avec celle mesurée au GPS.
La carte des différences d'altitude GPS/laser met en évidence deux phénomènes (Figure 38, Figure 39, Figure 40): une sous-estimation des altitudes et une surestimation des altitudes. Il faut se souvenir que l'altitude au droit des points GPS est interpolée et ne correspond pas systématiquement à la localisation d'un point de mesure laser. Le laser ne peut pas mesurer sous le sol.
Un MNT laser peut présenter une altitude inférieure aux points GPS laser dans la mesure où la variation d'altitude au sein de la maille de décimation laser n'est pas complètement enregistrée (Figure 40). Ces sous-estimations d'altitude sont localisées principalement le long des murets délimitant les parcelles de vigne, où la variation d'altitude est très abrupte. Ensuite il existe un certain nombre de points GPS dont l'altitude est également sous-évaluée au sein des parcelles de vigne. Ce phénomène demandera un plus ample examen et n'est pas expliqué pour l'instant.
La difficulté de filtrer les points laser est bien démontrée par cette comparaison avec les données GPS. On n'a pas de connaissance de l'altitude du sol a priori mais on doit néanmoins en prédire la position. L'algorithme de décimation adopté montre qu'en première approximation les résultats obtenus sont acceptables mais qu'il demande des développements plus approfondis. On peut imaginer de partir d’un maillage tel que celui présenté et de le raffiner ensuite avec divers critères de filtrage.
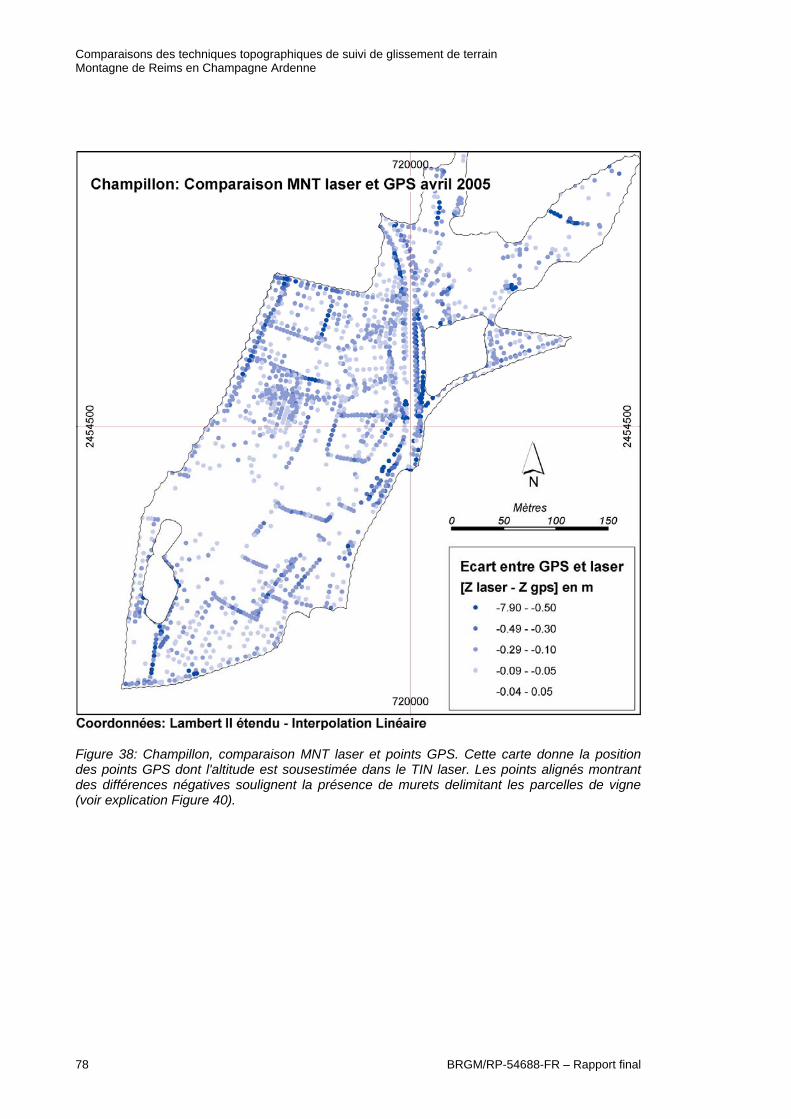
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
78 BRGM/RP-54688-FR – Rapport final
Figure 38: Champillon, comparaison MNT laser et points GPS. Cette carte donne la position des points GPS dont l'altitude est sousestimée dans le TIN laser. Les points alignés montrant des différences négatives soulignent la présence de murets delimitant les parcelles de vigne (voir explication Figure 40).
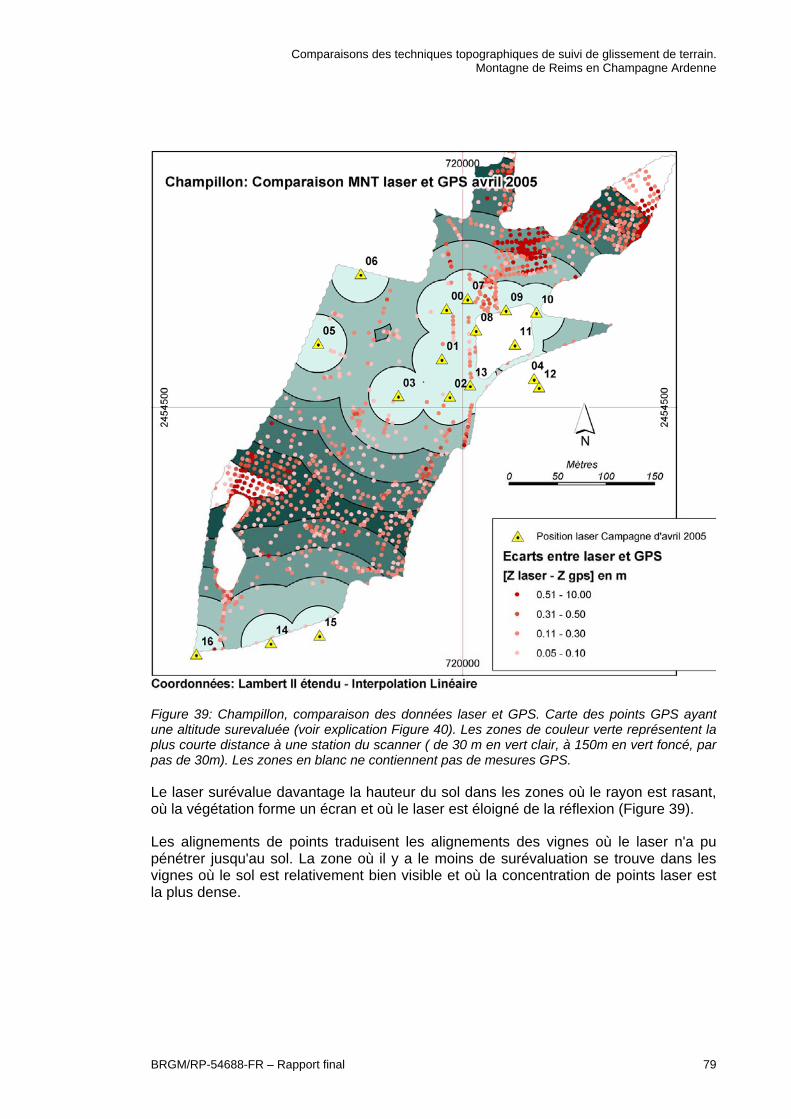
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 79
Figure 39: Champillon, comparaison des données laser et GPS. Carte des points GPS ayant une altitude surevaluée (voir explication Figure 40). Les zones de couleur verte représentent la plus courte distance à une station du scanner ( de 30 m en vert clair, à 150m en vert foncé, par pas de 30m). Les zones en blanc ne contiennent pas de mesures GPS.
Le laser surévalue davantage la hauteur du sol dans les zones où le rayon est rasant, où la végétation forme un écran et où le laser est éloigné de la réflexion (Figure 39).
Les alignements de points traduisent les alignements des vignes où le laser n'a pu pénétrer jusqu'au sol. La zone où il y a le moins de surévaluation se trouve dans les vignes où le sol est relativement bien visible et où la concentration de points laser est la plus dense.
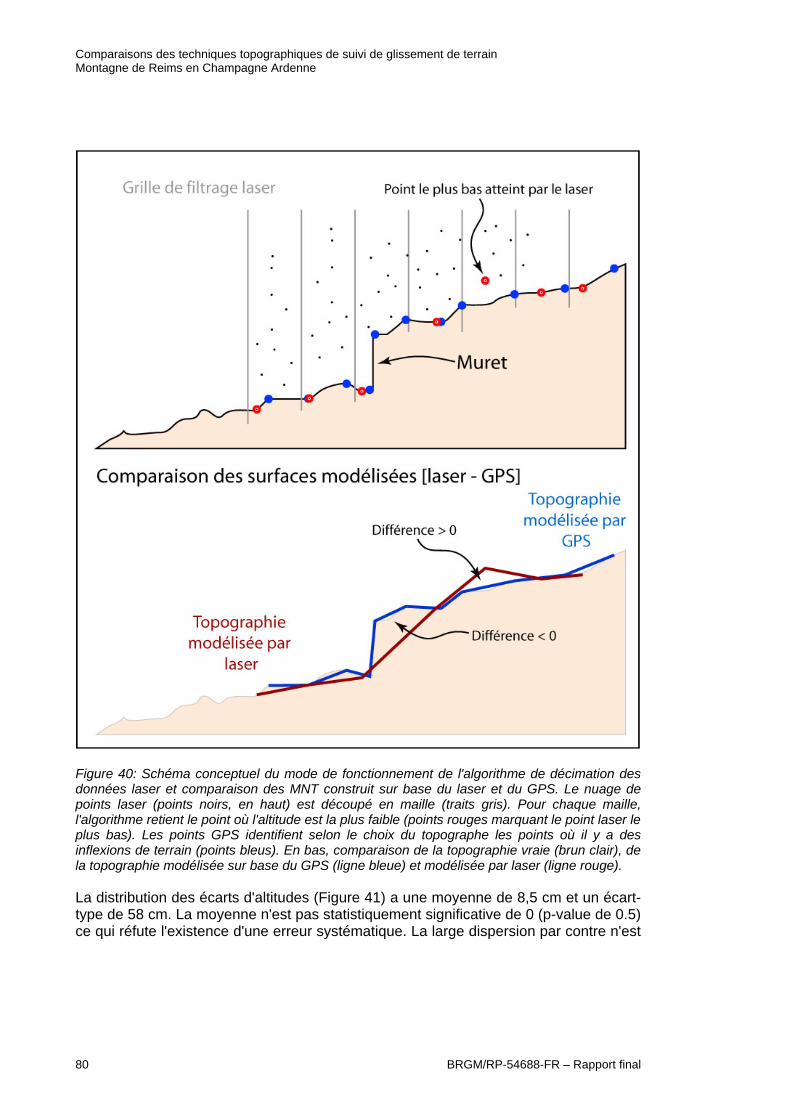
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
80 BRGM/RP-54688-FR – Rapport final
Figure 40: Schéma conceptuel du mode de fonctionnement de l'algorithme de décimation des données laser et comparaison des MNT construit sur base du laser et du GPS. Le nuage de points laser (points noirs, en haut) est découpé en maille (traits gris). Pour chaque maille, l'algorithme retient le point où l'altitude est la plus faible (points rouges marquant le point laser le plus bas). Les points GPS identifient selon le choix du topographe les points où il y a des inflexions de terrain (points bleus). En bas, comparaison de la topographie vraie (brun clair), de la topographie modélisée sur base du GPS (ligne bleue) et modélisée par laser (ligne rouge).
La distribution des écarts d'altitudes (Figure 41) a une moyenne de 8,5 cm et un écart-type de 58 cm. La moyenne n'est pas statistiquement significative de 0 (p-value de 0.5) ce qui réfute l'existence d'une erreur systématique. La large dispersion par contre n'est
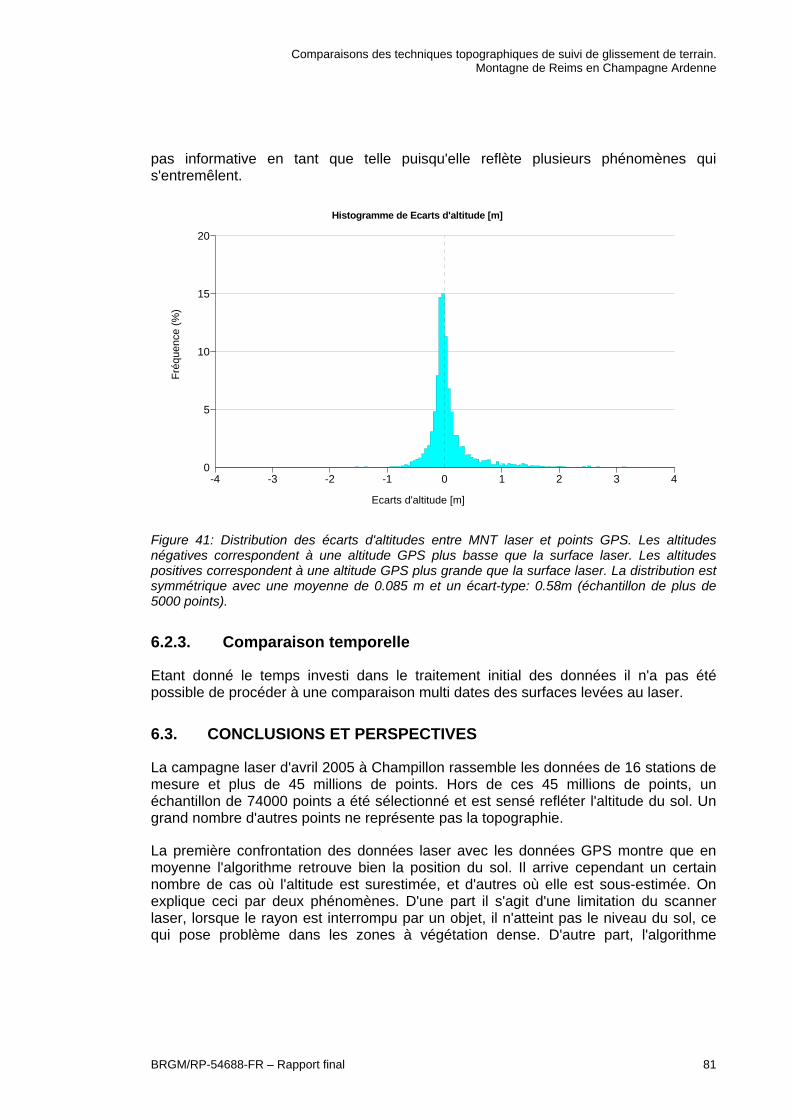
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 81
pas informative en tant que telle puisqu'elle reflète plusieurs phénomènes qui s'entremêlent.
Histogramme de Ecarts d'altitude [m]
Fréq
uenc
e (%
)
Ecarts d'altitude [m]
0
5
10
15
20
-1-2-3-4 0 1 2 3 4
Figure 41: Distribution des écarts d'altitudes entre MNT laser et points GPS. Les altitudes négatives correspondent à une altitude GPS plus basse que la surface laser. Les altitudes positives correspondent à une altitude GPS plus grande que la surface laser. La distribution est symmétrique avec une moyenne de 0.085 m et un écart-type: 0.58m (échantillon de plus de 5000 points).
6.2.3. Comparaison temporelle
Etant donné le temps investi dans le traitement initial des données il n'a pas été possible de procéder à une comparaison multi dates des surfaces levées au laser.
6.3. CONCLUSIONS ET PERSPECTIVES
La campagne laser d'avril 2005 à Champillon rassemble les données de 16 stations de mesure et plus de 45 millions de points. Hors de ces 45 millions de points, un échantillon de 74000 points a été sélectionné et est sensé refléter l'altitude du sol. Un grand nombre d'autres points ne représente pas la topographie.
La première confrontation des données laser avec les données GPS montre que en moyenne l'algorithme retrouve bien la position du sol. Il arrive cependant un certain nombre de cas où l'altitude est surestimée, et d'autres où elle est sous-estimée. On explique ceci par deux phénomènes. D'une part il s'agit d'une limitation du scanner laser, lorsque le rayon est interrompu par un objet, il n'atteint pas le niveau du sol, ce qui pose problème dans les zones à végétation dense. D'autre part, l'algorithme
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
82 BRGM/RP-54688-FR – Rapport final
automatique de modélisation du sol, lisse drastiquement la topographie et "ignore" typiquement la présence des murets existant dans la topographie.
Il conviendrait de raffiner le traitement des données laser. Pour ce faire, il existe des logiciels professionnels p.ex. PolyWorks ou TerraScan qui sont capable de filtrer la végétation hors des scans. L'inconvénient de tels outils est qu'ils sont très onéreux et qu'ils ne pouvaient être acquis dans le cadre du projet.
La richesse des données laser a été sous-exploitée et ce rapport ne présente vraiment qu'une toute petite partie du potentiel. L'avantage du site de Champillon c'est qu'il est couvert d’un grand nombre de murets de soutènement et de milliers de piquets de vigne. Pour le suivi d'un glissement, le levé de la position des murets permettrait de suivre le déplacement fin de chaque parcelle. De même, un traitement adapté pourrait permettre de suivre la position de chacun des piquets dans l'espace. Même si des travaux de maintenance des vignes sont susceptibles de modifier la position de certains piquets, leur très grand nombre pourrait néanmoins refléter des déplacements à l’échelle de la parcelle. Cependant, il ne s’agit pour l’instant que de pistes qui permettraient d'utiliser le plein potentiel des données laser.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 83
7. Résultats photogrammétriques
Le traitement des données photogrammétriques a été confiée à la SARL Image, basée à Villeurbanne. Leurs résultats complets sont présentés dans l'annexe 2. Seuls seront présentés ici les éléments critiques.
La photogrammétrie à basse altitude se propose de réaliser plusieurs produits à partir des photos acquises:
• Modèles numériques de terrain et comparaison multi-temporelle;
• Orthophotographies et comparaison multi-temporelle;
• Photographies terrestres et comparaison multi-temporelle;
Confrontés à des fenêtres de vols très limitées, l'effort d'acquisition et de traitement s'est essentiellement concentré sur le site de Boursault. Sur Champillon, seule une campagne de photo a livré des photos exploitables et n’a malheureusement pas pu donner lieu à une analyse comparable.
7.1. METHODOLOGIE
La méthodologie comporte plusieurs aspects :
• Orientation des prises de vue;
• Extraction de MNT à partir de couples de photos se recouvrant partiellement;
• Extraction d'orthophotographies;
• Comparaison de MNT;
• Comparaison d'orthophotographies.
Le traitement des données a été réalisé avec une série de modules photogrammétriques développés par l'équipe de Christophe Delacourt. L'aspect le plus novateur est l'utilisation d'un module de corrélation d'images optiques. Celui-ci est mis en œuvre à plusieurs niveaux du traitement photogrammétrique: lors de l'orientation relative des images, lors de l'extraction automatique des modèles numériques de terrain et lors de la comparaison d'orthophotographies.
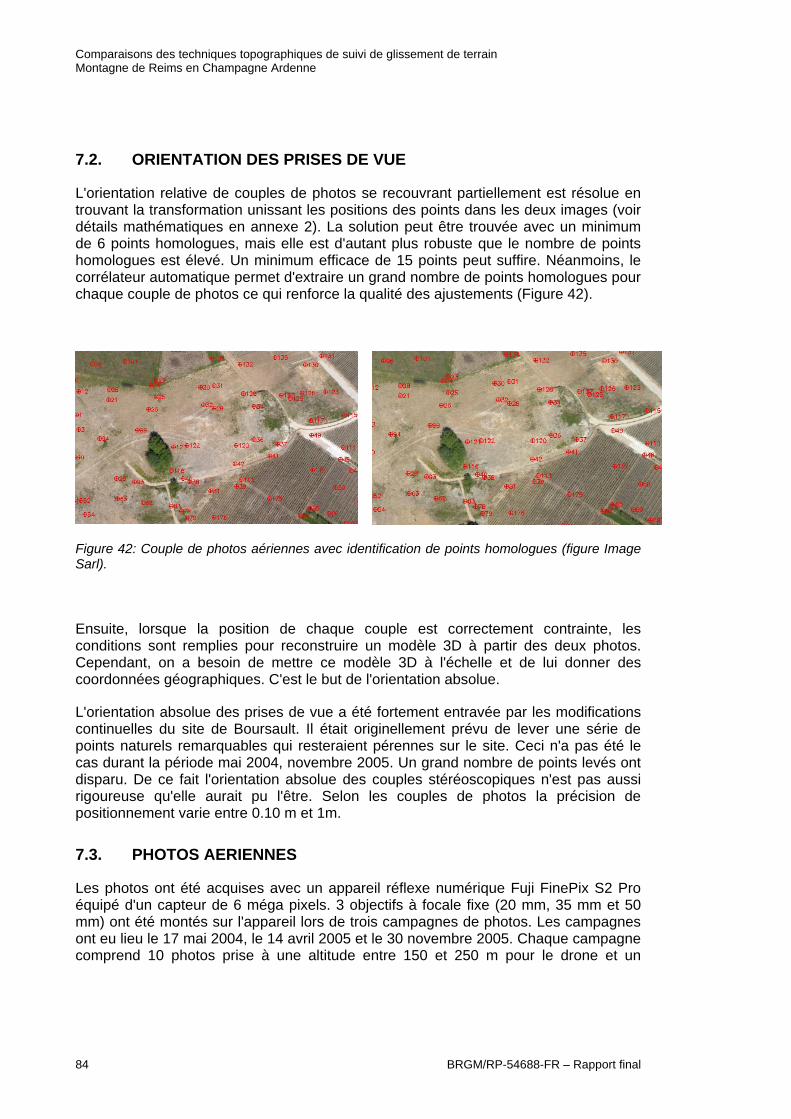
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
84 BRGM/RP-54688-FR – Rapport final
7.2. ORIENTATION DES PRISES DE VUE
L'orientation relative de couples de photos se recouvrant partiellement est résolue en trouvant la transformation unissant les positions des points dans les deux images (voir détails mathématiques en annexe 2). La solution peut être trouvée avec un minimum de 6 points homologues, mais elle est d'autant plus robuste que le nombre de points homologues est élevé. Un minimum efficace de 15 points peut suffire. Néanmoins, le corrélateur automatique permet d'extraire un grand nombre de points homologues pour chaque couple de photos ce qui renforce la qualité des ajustements (Figure 42).
Figure 42: Couple de photos aériennes avec identification de points homologues (figure Image Sarl).
Ensuite, lorsque la position de chaque couple est correctement contrainte, les conditions sont remplies pour reconstruire un modèle 3D à partir des deux photos. Cependant, on a besoin de mettre ce modèle 3D à l'échelle et de lui donner des coordonnées géographiques. C'est le but de l'orientation absolue.
L'orientation absolue des prises de vue a été fortement entravée par les modifications continuelles du site de Boursault. Il était originellement prévu de lever une série de points naturels remarquables qui resteraient pérennes sur le site. Ceci n'a pas été le cas durant la période mai 2004, novembre 2005. Un grand nombre de points levés ont disparu. De ce fait l'orientation absolue des couples stéréoscopiques n'est pas aussi rigoureuse qu'elle aurait pu l'être. Selon les couples de photos la précision de positionnement varie entre 0.10 m et 1m.
7.3. PHOTOS AERIENNES
Les photos ont été acquises avec un appareil réflexe numérique Fuji FinePix S2 Pro équipé d'un capteur de 6 méga pixels. 3 objectifs à focale fixe (20 mm, 35 mm et 50 mm) ont été montés sur l'appareil lors de trois campagnes de photos. Les campagnes ont eu lieu le 17 mai 2004, le 14 avril 2005 et le 30 novembre 2005. Chaque campagne comprend 10 photos prise à une altitude entre 150 et 250 m pour le drone et un
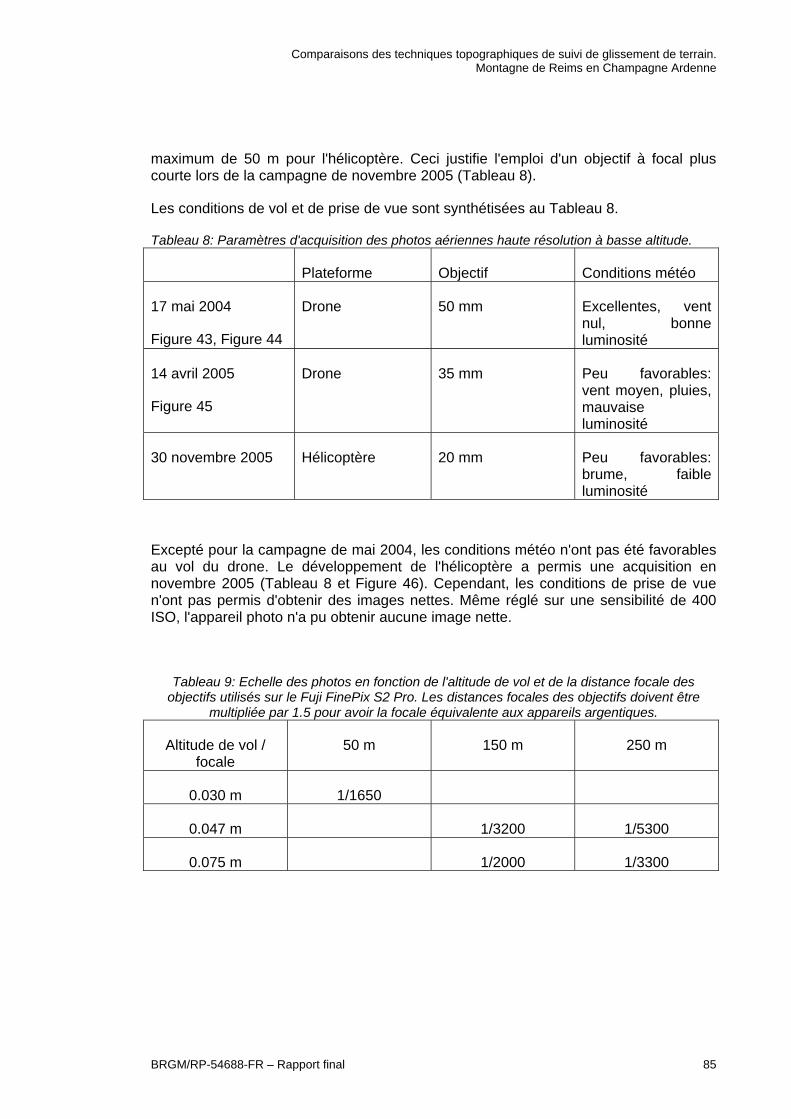
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 85
maximum de 50 m pour l'hélicoptère. Ceci justifie l'emploi d'un objectif à focal plus courte lors de la campagne de novembre 2005 (Tableau 8).
Les conditions de vol et de prise de vue sont synthétisées au Tableau 8.
Tableau 8: Paramètres d'acquisition des photos aériennes haute résolution à basse altitude.
Plateforme Objectif Conditions météo
17 mai 2004
Figure 43, Figure 44
Drone 50 mm Excellentes, vent nul, bonne luminosité
14 avril 2005
Figure 45
Drone 35 mm Peu favorables: vent moyen, pluies, mauvaise luminosité
30 novembre 2005
Hélicoptère 20 mm Peu favorables: brume, faible luminosité
Excepté pour la campagne de mai 2004, les conditions météo n'ont pas été favorables au vol du drone. Le développement de l'hélicoptère a permis une acquisition en novembre 2005 (Tableau 8 et Figure 46). Cependant, les conditions de prise de vue n'ont pas permis d'obtenir des images nettes. Même réglé sur une sensibilité de 400 ISO, l'appareil photo n'a pu obtenir aucune image nette.
Tableau 9: Echelle des photos en fonction de l'altitude de vol et de la distance focale des objectifs utilisés sur le Fuji FinePix S2 Pro. Les distances focales des objectifs doivent être
multipliée par 1.5 pour avoir la focale équivalente aux appareils argentiques.
Altitude de vol / focale
50 m 150 m 250 m
0.030 m 1/1650
0.047 m 1/3200 1/5300
0.075 m 1/2000 1/3300
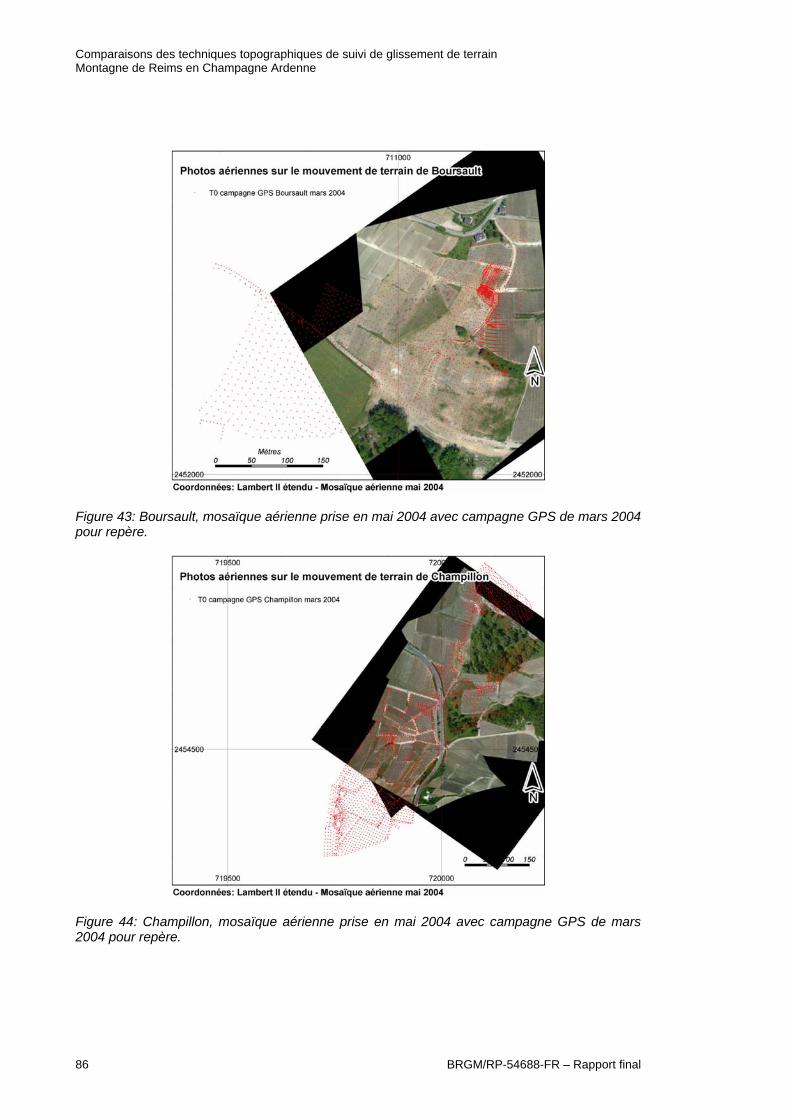
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
86 BRGM/RP-54688-FR – Rapport final
Figure 43: Boursault, mosaïque aérienne prise en mai 2004 avec campagne GPS de mars 2004 pour repère.
Figure 44: Champillon, mosaïque aérienne prise en mai 2004 avec campagne GPS de mars 2004 pour repère.
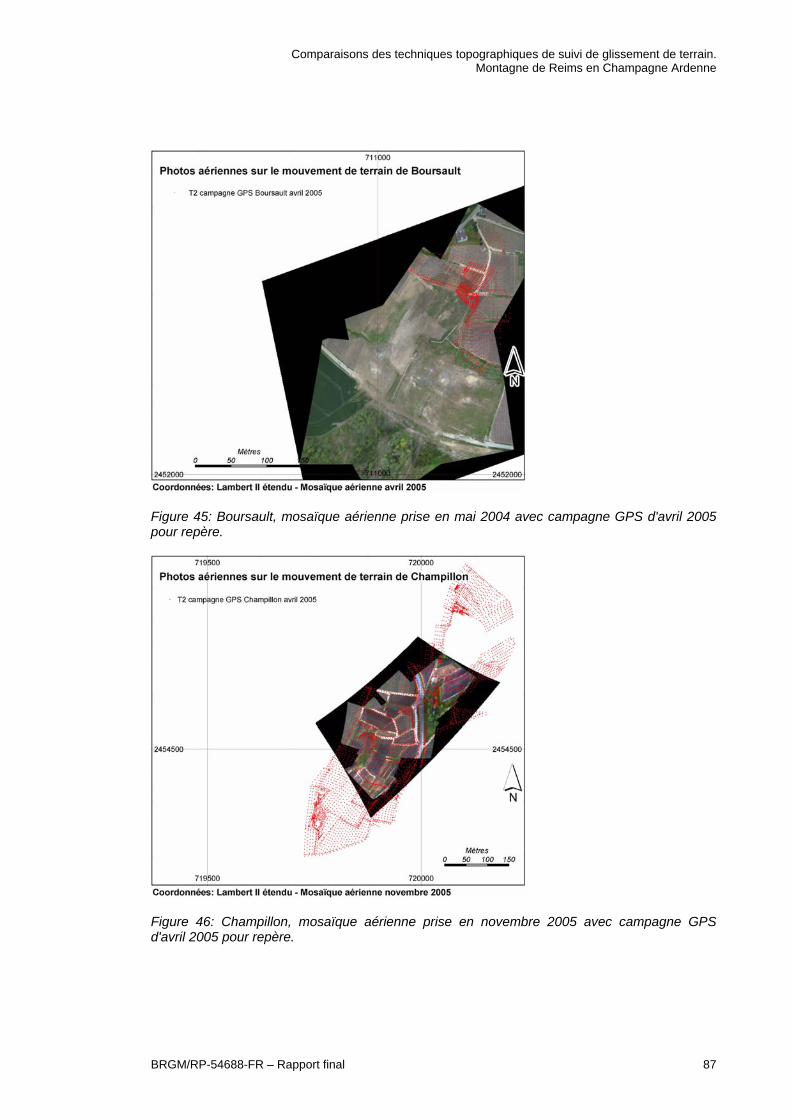
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 87
Figure 45: Boursault, mosaïque aérienne prise en mai 2004 avec campagne GPS d'avril 2005 pour repère.
Figure 46: Champillon, mosaïque aérienne prise en novembre 2005 avec campagne GPS d'avril 2005 pour repère.
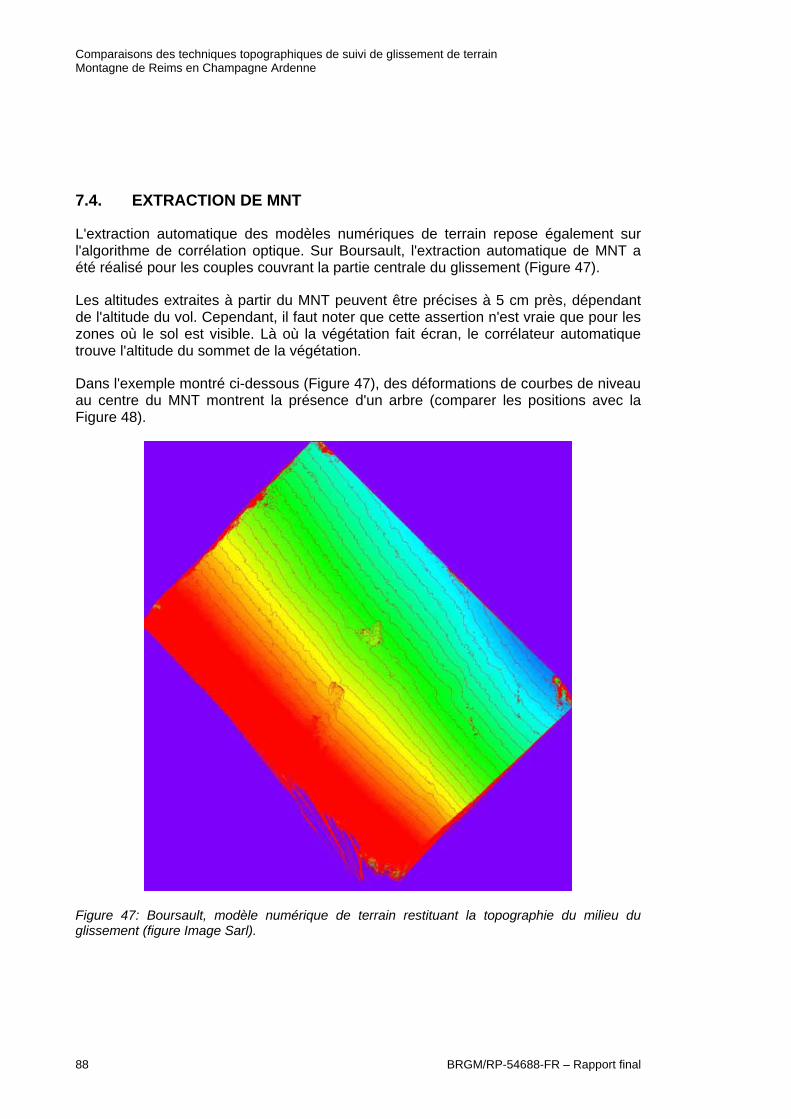
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
88 BRGM/RP-54688-FR – Rapport final
7.4. EXTRACTION DE MNT
L'extraction automatique des modèles numériques de terrain repose également sur l'algorithme de corrélation optique. Sur Boursault, l'extraction automatique de MNT a été réalisé pour les couples couvrant la partie centrale du glissement (Figure 47).
Les altitudes extraites à partir du MNT peuvent être précises à 5 cm près, dépendant de l'altitude du vol. Cependant, il faut noter que cette assertion n'est vraie que pour les zones où le sol est visible. Là où la végétation fait écran, le corrélateur automatique trouve l'altitude du sommet de la végétation.
Dans l'exemple montré ci-dessous (Figure 47), des déformations de courbes de niveau au centre du MNT montrent la présence d'un arbre (comparer les positions avec la Figure 48).
Figure 47: Boursault, modèle numérique de terrain restituant la topographie du milieu du glissement (figure Image Sarl).
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 89
7.5. PRODUCTION D'ORTHOPHOTOGRAPHIES
Une orthophotographie est une photo dont l'échelle est identique dans tout le champ de la photo. Ceci n'est possible que lorsqu'on retire les déformations dues à l'objectif de l'appareil photo, à l'inclinaison de la prise de vue et à la topographie. L'orientation interne des photos permet de retirer les déformations de l'objectif. L'orientation absolue détermine la position de l'appareil au moment de la prise de vue, ce qui permet de contraindre l'angle de visée. L'extraction du MNT enfin permet de soustraire l'effet dû à la topographie.
L'intérêt d'une telle image est qu'il est possible de mesurer des distances exactes et de pouvoir comparer celles produites à deux époques différentes.
Les orthophotos produites pour cette étude ont une taille de pixel de 5 cm.
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
90 BRGM/RP-54688-FR – Rapport final
Figure 48: Boursault, orthophotographie correspondant au MNT présenté à la Figure 47 (figure Image Sarl).
7.6. CORRELATION D'ORTHOPHOTOGRAPHIES
La comparaison d'orthophotographie entre vols successifs repose encore sur l'algorithme de corrélation optique. On recherche dans deux orthophotographies la position de points homologues. Si cette position est identique, le point est resté immobile (aux erreurs près). Si par contre le point n'est plus à la même position, c'est que le glissement l'a emporté. Cette opération donne une image du champ de déformation planimétrique du glissement de terrain.
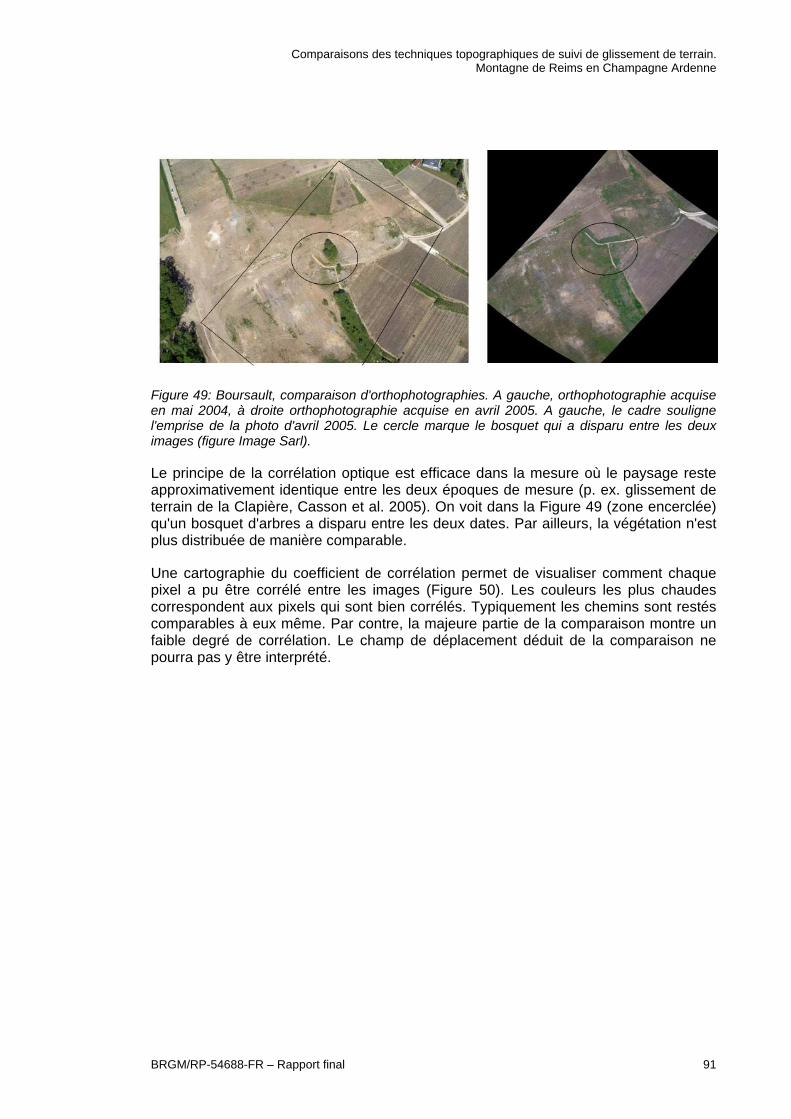
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 91
Figure 49: Boursault, comparaison d'orthophotographies. A gauche, orthophotographie acquise en mai 2004, à droite orthophotographie acquise en avril 2005. A gauche, le cadre souligne l'emprise de la photo d'avril 2005. Le cercle marque le bosquet qui a disparu entre les deux images (figure Image Sarl).
Le principe de la corrélation optique est efficace dans la mesure où le paysage reste approximativement identique entre les deux époques de mesure (p. ex. glissement de terrain de la Clapière, Casson et al. 2005). On voit dans la Figure 49 (zone encerclée) qu'un bosquet d'arbres a disparu entre les deux dates. Par ailleurs, la végétation n'est plus distribuée de manière comparable.
Une cartographie du coefficient de corrélation permet de visualiser comment chaque pixel a pu être corrélé entre les images (Figure 50). Les couleurs les plus chaudes correspondent aux pixels qui sont bien corrélés. Typiquement les chemins sont restés comparables à eux même. Par contre, la majeure partie de la comparaison montre un faible degré de corrélation. Le champ de déplacement déduit de la comparaison ne pourra pas y être interprété.
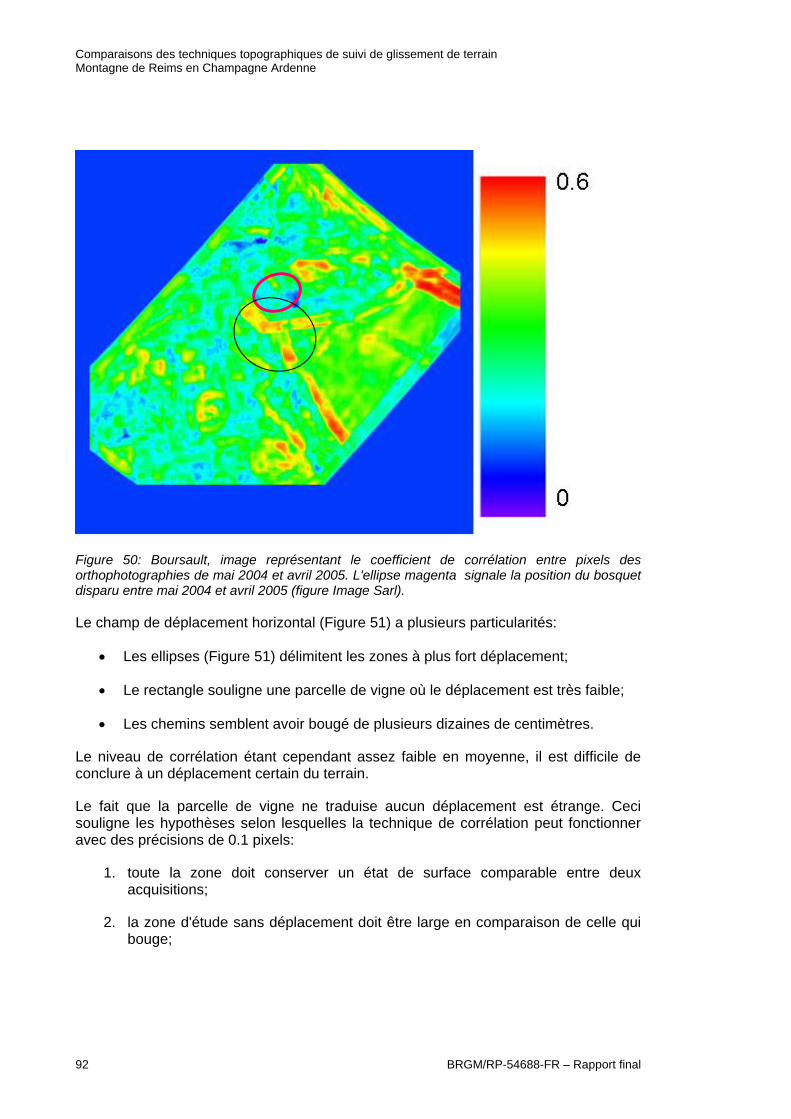
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
92 BRGM/RP-54688-FR – Rapport final
Figure 50: Boursault, image représentant le coefficient de corrélation entre pixels des orthophotographies de mai 2004 et avril 2005. L'ellipse magenta signale la position du bosquet disparu entre mai 2004 et avril 2005 (figure Image Sarl).
Le champ de déplacement horizontal (Figure 51) a plusieurs particularités:
• Les ellipses (Figure 51) délimitent les zones à plus fort déplacement;
• Le rectangle souligne une parcelle de vigne où le déplacement est très faible;
• Les chemins semblent avoir bougé de plusieurs dizaines de centimètres.
Le niveau de corrélation étant cependant assez faible en moyenne, il est difficile de conclure à un déplacement certain du terrain.
Le fait que la parcelle de vigne ne traduise aucun déplacement est étrange. Ceci souligne les hypothèses selon lesquelles la technique de corrélation peut fonctionner avec des précisions de 0.1 pixels:
1. toute la zone doit conserver un état de surface comparable entre deux acquisitions;
2. la zone d'étude sans déplacement doit être large en comparaison de celle qui bouge;
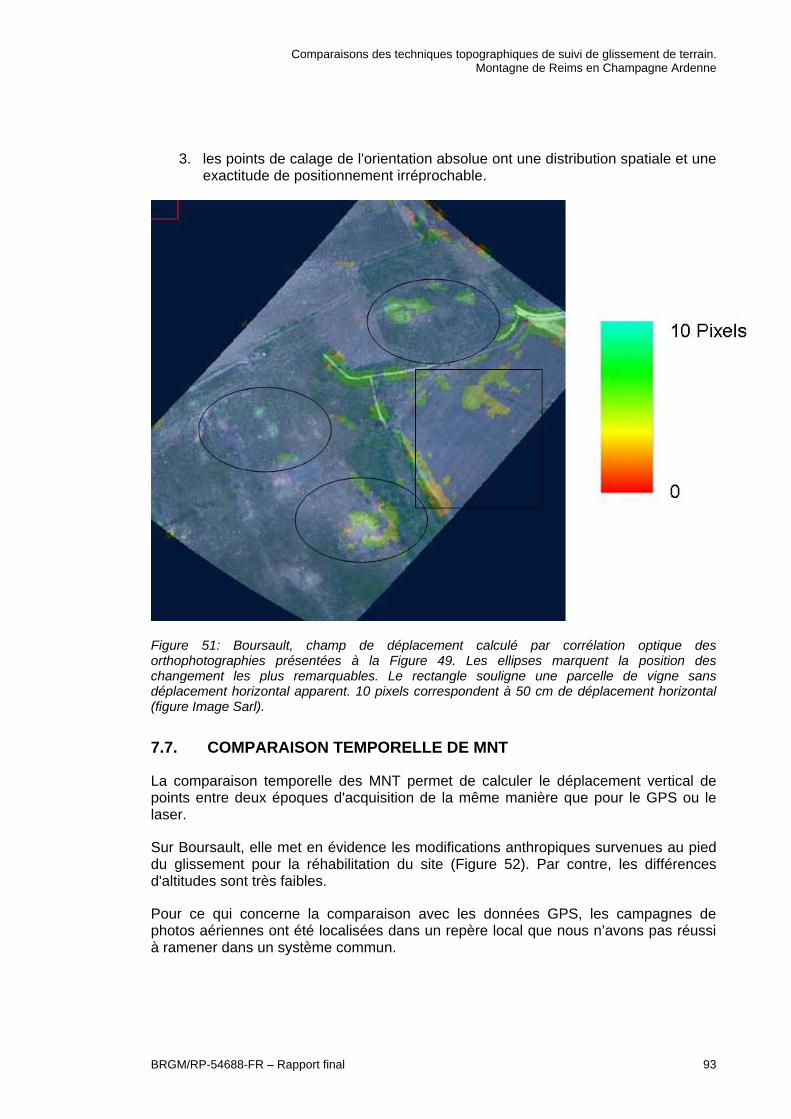
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 93
3. les points de calage de l'orientation absolue ont une distribution spatiale et une exactitude de positionnement irréprochable.
Figure 51: Boursault, champ de déplacement calculé par corrélation optique des orthophotographies présentées à la Figure 49. Les ellipses marquent la position des changement les plus remarquables. Le rectangle souligne une parcelle de vigne sans déplacement horizontal apparent. 10 pixels correspondent à 50 cm de déplacement horizontal (figure Image Sarl).
7.7. COMPARAISON TEMPORELLE DE MNT
La comparaison temporelle des MNT permet de calculer le déplacement vertical de points entre deux époques d'acquisition de la même manière que pour le GPS ou le laser.
Sur Boursault, elle met en évidence les modifications anthropiques survenues au pied du glissement pour la réhabilitation du site (Figure 52). Par contre, les différences d'altitudes sont très faibles.
Pour ce qui concerne la comparaison avec les données GPS, les campagnes de photos aériennes ont été localisées dans un repère local que nous n’avons pas réussi à ramener dans un système commun.
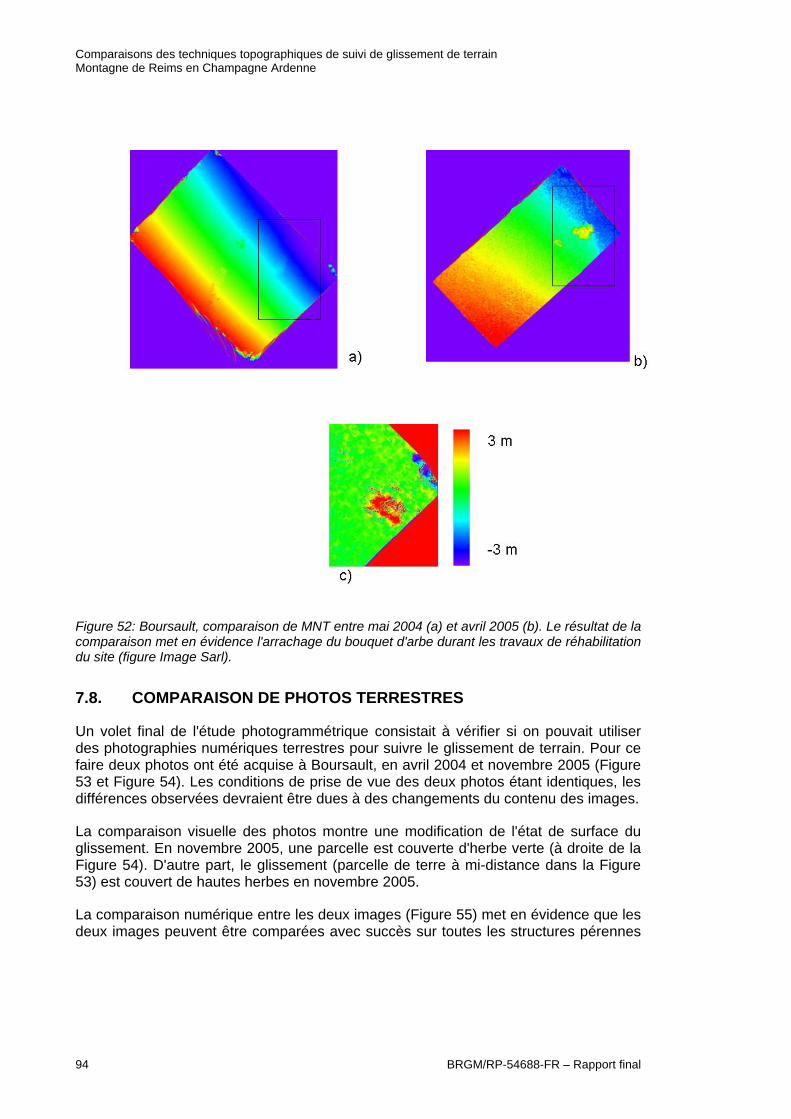
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
94 BRGM/RP-54688-FR – Rapport final
Figure 52: Boursault, comparaison de MNT entre mai 2004 (a) et avril 2005 (b). Le résultat de la comparaison met en évidence l'arrachage du bouquet d'arbe durant les travaux de réhabilitation du site (figure Image Sarl).
7.8. COMPARAISON DE PHOTOS TERRESTRES
Un volet final de l'étude photogrammétrique consistait à vérifier si on pouvait utiliser des photographies numériques terrestres pour suivre le glissement de terrain. Pour ce faire deux photos ont été acquise à Boursault, en avril 2004 et novembre 2005 (Figure 53 et Figure 54). Les conditions de prise de vue des deux photos étant identiques, les différences observées devraient être dues à des changements du contenu des images.
La comparaison visuelle des photos montre une modification de l'état de surface du glissement. En novembre 2005, une parcelle est couverte d'herbe verte (à droite de la Figure 54). D'autre part, le glissement (parcelle de terre à mi-distance dans la Figure 53) est couvert de hautes herbes en novembre 2005.
La comparaison numérique entre les deux images (Figure 55) met en évidence que les deux images peuvent être comparées avec succès sur toutes les structures pérennes
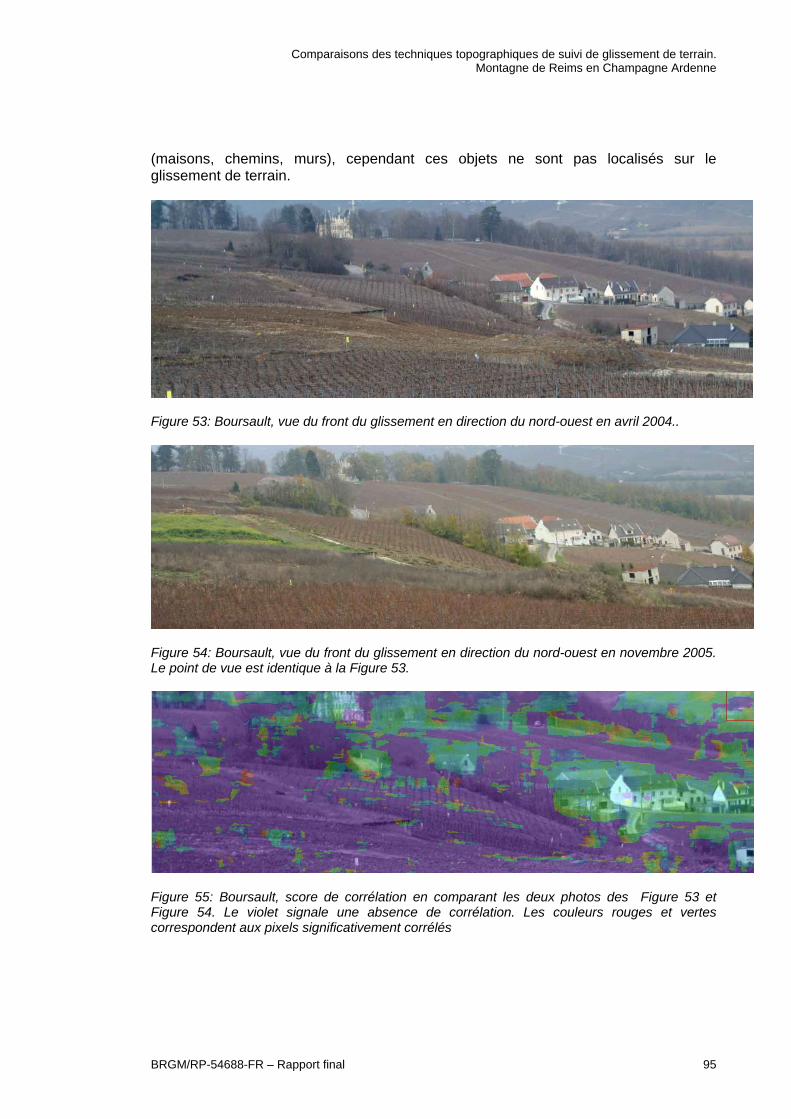
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 95
(maisons, chemins, murs), cependant ces objets ne sont pas localisés sur le glissement de terrain.
Figure 53: Boursault, vue du front du glissement en direction du nord-ouest en avril 2004..
Figure 54: Boursault, vue du front du glissement en direction du nord-ouest en novembre 2005. Le point de vue est identique à la Figure 53.
Figure 55: Boursault, score de corrélation en comparant les deux photos des Figure 53 et Figure 54. Le violet signale une absence de corrélation. Les couleurs rouges et vertes correspondent aux pixels significativement corrélés
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
96 BRGM/RP-54688-FR – Rapport final
7.9. CONCLUSIONS ET RECOMMANDATIONS
Les images aériennes acquises par l’IGN ne sont pas adaptées pour la caractérisation et le suivi des instabilités de pente se produisant sur la Montagne de Reims. La résolution spatiale (de l’ordre du mètre) et la répétitivité temporelle (de l’ordre de 5 ans) sont inadaptées à la cinématique et à la taille des zones en mouvements.
Les plateformes radiocommandées (Drones ou hélicoptères) fournissent des images à très hautes résolutions spatiales (de l’ordre de quelques centimètres) en adéquation avec les échelles caractéristiques des glissements de terrain champenois et permettent ainsi des analyses morphologiques fines. En outre, la facilité de mise en œuvre de ces plateformes permet d’accroître la répétitivité des acquisitions.
Différentes conditions doivent cependant être remplies simultanément pour la réussite des acquisitions par le Drone sur le site de la montagne de Reims:
• Absence de feuilles sur les ceps, afin de visualiser le sol à travers les rangs de vigne.
• Absence de vent afin de ne pas perturber le vol.
• Absence de neige afin de ne pas modifier temporairement la topographie lors de la mesure
• Absence de brume ou brouillard afin d’obtenir des images de bonne qualité.
L’absence de feuilles impose que les vols aient lieu d’Octobre / Novembre à Avril / Mai selon les années. Or cette période est plus propice à la présence de neige, de brume, de brouillard, et de vent, ce qui implique de nouvelles limitations sur les fenêtres de vol. La présence de vent est une condition critique à l’utilisation des drones lents qui ne peuvent donc être considérés comme opérationnels pour ce type d’applications.
L’hélicoptère radiocommandé offre une alternative au Drone lent. Bien qu’il soit moins sensible au vent, son pilotage se révèle plus délicat et limite la hauteur de prise de vue. La conséquence immédiate est la difficulté de couvrir de grandes zones (Champillon par exemple). L’installation d’une aide au pilotage, ou même un pilotage automatique bien que n’ayant pas été testés lors de cette étude semblerait la solution idéale.
Concernant la méthodologie de mesures du champ de déplacement, les techniques de corrélation d’images optiques très haute résolutions et de calculs différentiels de Modèles Numériques de Terrain (MNT) se révèlent plus difficile à mettre en œuvre que sur les glissements alpins.
L’option de se focaliser sur le glissement de Boursault aurait dû se révéler favorable si les contraintes socio-économiques n’avaient nécessité de réhabiliter le site dans les plus brefs délais. La technique de mesure de déplacement par corrélation d’images
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 97
multi temporelles, repose en effet sur la conservation de l’état de surface entre plusieurs acquisitions. Les travaux de réhabilitation entraînant l’apport de garde quantité de matière, modifient irrémédiablement l’état de surface. Ce problème est identique pour les techniques de différentiels de MNT.
En outre la génération d’orthophotographies et de MNT nécessite de prendre des points de référence de façon extrêmement précise (de l’ordre du centimètre). La modification des états de surface et la présence végétation ne permettent pas de conserver des points de référence naturels sur plusieurs images. Il est donc fondamental d’implanter des points de calage artificiels qui soient permanents ou levés par rapport à un référentiel fixe lors de chaque campagne. Bien que la mise en place et la mesure de la position de cibles artificielles accroisse la durée des missions, cette technique se révèle la meilleure pour atteindre systématiquement les précisions requises pour des MNT et des orthophotographies. La caractérisation des glissements plus lents (de l’ordre du centimètre par an) se révèle extrêmement difficile par les techniques de corrélation d’images optiques très haute résolution et de différentiels de MNT. L’accroissement de l’écart temporel entre les acquisitions afin d’obtenir des décalages supérieurs à la précision de la méthode est réalisé au détriment de la conservation de l’état de surface. La durée relativement courte de ce projet n’a pas permis d’obtenir des résultats satisfaisants dans ce cas. Une alternative consisterait a diminuer la hauteur de prise de vue des images, qui se traduirait pas une diminution de la zone couverte et donc une difficulté d’exploitation sur les glissements de grande ampleur.

Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 99
8. Conclusions et recommandations
8.1. MOUVEMENTS OBSERVES SUR LE GLISSEMENT DE BOURSAULT
Le glissement de terrain de Boursault a été activé au début des années 2000. Neuf hectares de vignes ont été détruits. Lors de la crise paroxysmique, le glissement a avancé de l'ordre de 10 m par jour. Depuis lors, des travaux de réhabilitation et de stabilisation ont été entrepris. C'est dans ce cadre que les études topographiques menées par le BRGM et l'URCA (Université de Reims) ont commencé.
Trois campagnes D-GPS ont été entreprises en mars 2004, décembre 2004 et avril 2005 sur une surface d'environ 10 ha. La comparaison de ces données a mis en évidence des modifications anthropiques de la topographie avec un remblaiement par apport de terre.
Une faible évolution naturelle a été observée au pied du glissement de terrain avec l'érosion du bourrelet frontal et une croissance consécutive du même bourrelet compensant l'érosion du matériau. Les ordres de grandeurs des déplacements observés sur le front du bourrelet sont voisins de 10 à 20 cm en 1 an.
La photogrammétrie à basse altitude a également mis en évidence des modifications anthropiques non négligeables en pied de glissement, dans la partie non affectée par le glissement ???. Ailleurs, les modifications sont faibles et difficilement séparables des erreurs de mesure. La corrélation d'image optique a largement échoué sur ce site. Bien qu'efficace sur d'autres glissements de terrain, le site de Boursault a été trop largement perturbé entre chaque campagne de photo pour permettre une corrélation d'image efficace.
Deux campagnes de mesure laser ont été réalisée à Boursault. Cependant, la mise au point d'une méthodologie de traitement n'a pas abouti suffisamment vite pour laisser l'opportunité de comparer les topographies et comparer les techniques.
8.2. MOUVEMENTS OBSERVES SUR LE GLISSEMENT DE CHAMPILLON
Le glissement de terrain de Champillon semble se déplacer en moyenne de 10 cm/an depuis les 200 dernières années. Cependant, ce taux de déplacement ne correspond qu'à une moyenne et peut varier largement d'une année à la suivante.
Trois levés GPS ont été réalisés en mars 2004, janvier 2005 et avril 2005 sur les 16 ha du site. La comparaison des surfaces topographiques conduit à des images où les différences observées ne semblent pas mettre en évidence de mouvement particulier que ce soit au niveau du front ou ailleurs dans le glissement.
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
100 BRGM/RP-54688-FR – Rapport final
Une comparaison fine par krigeage a eu lieu au niveau de deux parcelles de vigne, en haut et en bas de glissement. Cependant, les erreurs inhérentes aux mesures GPS ne permettent pas de mettre en évidence les points qui auraient bougé avec un niveau significatif.
Deux campagnes de scan laser ont eu lieu à Champillon en décembre 2004 et avril 2005. En décembre 2004, 12 stations ont été réalisées, livrant un total de 24 millions de points de données. En avril 2005, un total de 16 stations a produit 46 millions de points de données. Le filtrage de ces données a permis de développer un algorithme de filtrage des données inspiré de celui appliqué aux données LiDAR (laser aéroporté).
Bien que des logiciels de traitement existent, leur prix est prohibitif et sortaient de l'objectif exploratoire de cette étude. La mise au point d'un algorithme de traitement des points laser a consommé un temps considérable ne laissant pas la possibilité de comparer les nuages de points laser entre eux. Cependant, la comparaison de la surface extraite du nuage de points laser et des points GPS a mis en évidence que le nuage de points laser filtrés surestimait l'altitude du sol à des distances supérieures à 30 m du scanner. D'autre part, l'interpolation linéaire de la surface laser sous-estimait l'altitude du sol au niveau des changements abrupts de topographie.
Pour ce qui concerne l'acquisition de photographies aériennes à basse altitude, les conditions de vol n'ont pas permis d'obtenir deux campagnes de photos aériennes que l'on puisse comparer. Avec l'expérience de Boursault, il est dommage de ne pas disposer de données comparables dans la mesure où l'état de la surface des vignes de Champillon est un terrain de test optimal pour la corrélation d'images optiques.
8.3. LEVES D-GPS
La technique de levé D-GPS adoptée pour cette étude consiste à lever des nuages de points assez denses pour permettre leur comparaison. L'objectif était d’évaluer dans quelles conditions on peut détecter des déplacements du sol, simplement en comparant deux surfaces d'altitude. L'objectif était de ne pas utiliser des bornes disséminées sur le terrain de manière à suivre le déplacement de points fixes.
La comparaison de surface interpolée linéairement a conduit à des images de différences d'altitude. Dans le cas de Boursault, les variations d'altitudes les plus remarquables sont apparues à cause de modifications anthropiques. Sur le front du glissement cependant on a observé des modifications naturelles d'une ampleur de 10 à 20 cm. A Champillon, la comparaison des altitudes ne montre pas de mouvement d'ensemble. Pour obtenir une appréciation plus fine des déplacements il est nécessaire d'avoir recours à des techniques d'interpolation plus raffinées.
L'interpolation par krigeage devait permettre de quantifier le seuil de détectabilité des mouvements. Testée sur le site de Champillon, cette technique a révélé que la structure du terrain posait un problème fondamental, la précision de l'interpolation est d'autant plus mauvaise que des variations abruptes sont présentes dans les données. Ceci est le cas à Champillon où des murets de soutènement de plusieurs dizaines de centimètres de hauteur rompent localement les pentes douces de la topographie. Il est
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 101
possible de s'affranchir de ce problème en introduisant des discontinuités dans la modélisation du jeu de données, mais ces discontinuités n'ont pas été levées systématiquement, empêchant une modélisation complète des sites de Champillon et de Boursault.
Un test a été réalisé sur deux parcelles ne contenant aucun muret. La conclusion de ce test est qu'il est a priori possible de détecter des déplacements significatifs de la topographie de l'ordre de 10 cm avec le jeu de données D-GPS acquis lors de cette étude si les données sont interpolées par krigeage.
8.4. LEVES AU SCANNER LASER
Le levé scanner laser a mis en évidence les avantages et les inconvénients d'une telle technique. La productivité et la précision du levé sont ses atouts principaux. Les nuages de points obtenus demandent finalement peu de temps d'acquisition.
Au moment du levé il est important que le sol soit visible. A Champillon ceci n'a pas posé de difficulté. Les vignes n'avaient pas de feuilles et les sarments avaient été coupés. Les obstacles au dessus du sol étaient ainsi minimisés. Si on travaille sur une zone à herbes folles comme à Boursault, il faut prévoir de faucher le terrain.
La localisation du scanner laser est un autre facteur limitatif de la précision du levé. Avec une trentaine de cibles dispersées sur le terrain et localisées au tachéomètre, il est possible de déterminer la position du scanner à 1-2 cm près.
Le traitement des données issues du scan posent actuellement problème. Si les scans sont denses, une large fraction des points de mesures ont atteint le sol. Il est cependant nécessaire de filtrer tous les points parasites. L'algorithme mis au point n'est pas complètement efficace et le flux de traitement n'est pas suffisamment optimisé. Pour palier ce constat, des logiciels commerciaux dédiés à ces taches sont une alternative possible.
8.5. LEVE PHOTOGRAMMETRIQUE A BASSE ALTITUDE
Pour la réalisation de photographies haute résolution à basse altitude, le plein potentiel de la technique n'a pas été atteint.
Les 6 visites de terrain n'ont permis que trois acquisitions. Les fenêtres météo disponibles durant les périodes où la végétation a perdu ses feuilles sont très rares. La mise au point d'un hélicoptère radiocommandé au lieu d'un drone paramoteur en fin de projet a permis la réalisation de prise de vues en novembre 2005, mais les conditions de luminosité ont finalement empêché d'obtenir des résultats satisfaisant.
L'exploitation des données a également été limitée par l'absence de robustes points de calage dont la position devait être connue à 1-2 cm près. L'orientation des couples stéréoscopiques s'en est ressentie et les orthophotographies ainsi que les modèles numériques de terrain sont moins précis. Pour une prochaine acquisition, il faudra
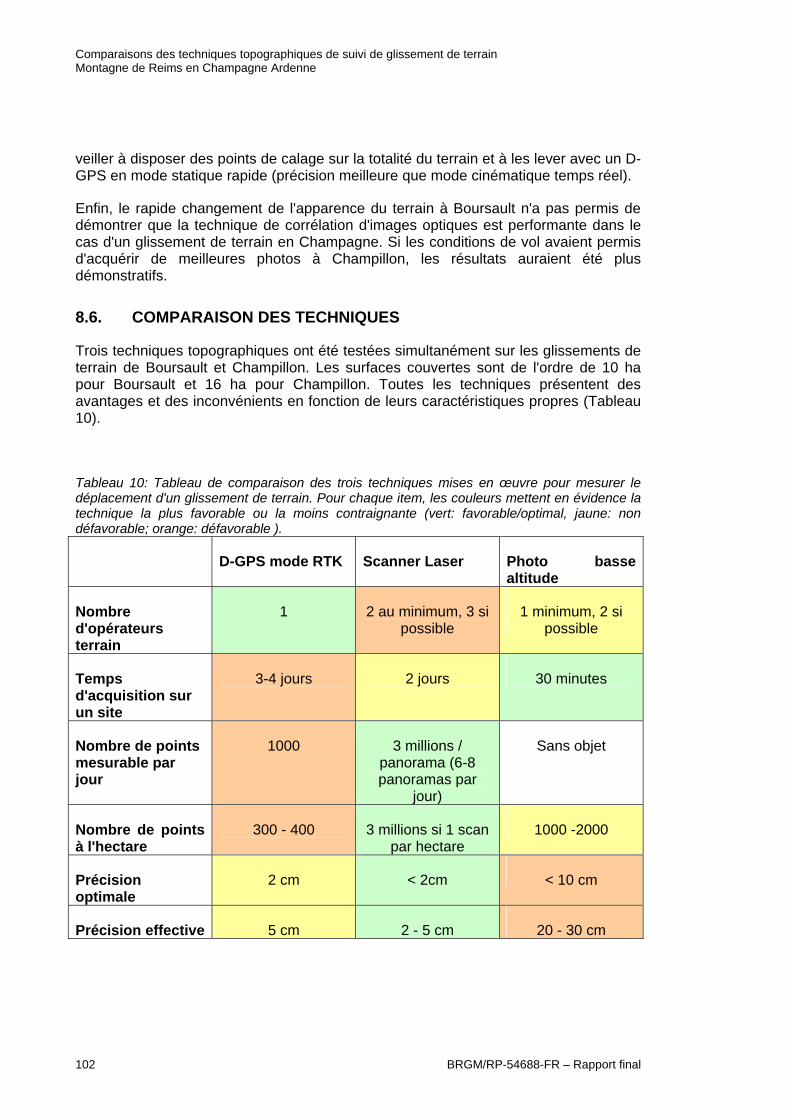
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
102 BRGM/RP-54688-FR – Rapport final
veiller à disposer des points de calage sur la totalité du terrain et à les lever avec un D-GPS en mode statique rapide (précision meilleure que mode cinématique temps réel).
Enfin, le rapide changement de l'apparence du terrain à Boursault n'a pas permis de démontrer que la technique de corrélation d'images optiques est performante dans le cas d'un glissement de terrain en Champagne. Si les conditions de vol avaient permis d'acquérir de meilleures photos à Champillon, les résultats auraient été plus démonstratifs.
8.6. COMPARAISON DES TECHNIQUES
Trois techniques topographiques ont été testées simultanément sur les glissements de terrain de Boursault et Champillon. Les surfaces couvertes sont de l'ordre de 10 ha pour Boursault et 16 ha pour Champillon. Toutes les techniques présentent des avantages et des inconvénients en fonction de leurs caractéristiques propres (Tableau 10).
Tableau 10: Tableau de comparaison des trois techniques mises en œuvre pour mesurer le déplacement d'un glissement de terrain. Pour chaque item, les couleurs mettent en évidence la technique la plus favorable ou la moins contraignante (vert: favorable/optimal, jaune: non défavorable; orange: défavorable ).
D-GPS mode RTK Scanner Laser Photo basse altitude
Nombre d'opérateurs terrain
1 2 au minimum, 3 si possible
1 minimum, 2 si possible
Temps d'acquisition sur un site
3-4 jours 2 jours 30 minutes
Nombre de points mesurable par jour
1000 3 millions / panorama (6-8 panoramas par
jour)
Sans objet
Nombre de points à l'hectare
300 - 400 3 millions si 1 scan par hectare
1000 -2000
Précision optimale
2 cm < 2cm < 10 cm
Précision effective 5 cm 2 - 5 cm 20 - 30 cm
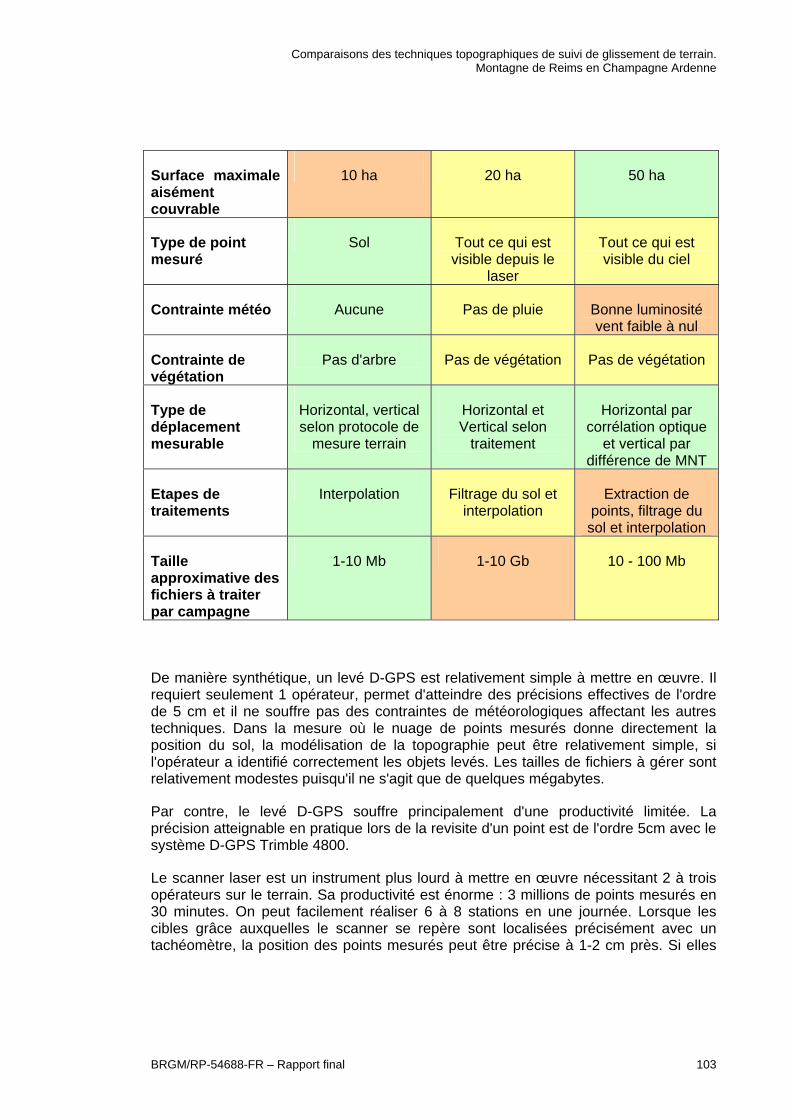
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 103
Surface maximale aisément couvrable
10 ha 20 ha 50 ha
Type de point mesuré
Sol Tout ce qui est visible depuis le
laser
Tout ce qui est visible du ciel
Contrainte météo Aucune Pas de pluie Bonne luminosité vent faible à nul
Contrainte de végétation
Pas d'arbre Pas de végétation Pas de végétation
Type de déplacement mesurable
Horizontal, vertical selon protocole de
mesure terrain
Horizontal et Vertical selon
traitement
Horizontal par corrélation optique
et vertical par différence de MNT
Etapes de traitements
Interpolation Filtrage du sol et interpolation
Extraction de points, filtrage du sol et interpolation
Taille approximative des fichiers à traiter par campagne
1-10 Mb 1-10 Gb 10 - 100 Mb
De manière synthétique, un levé D-GPS est relativement simple à mettre en œuvre. Il requiert seulement 1 opérateur, permet d'atteindre des précisions effectives de l'ordre de 5 cm et il ne souffre pas des contraintes de météorologiques affectant les autres techniques. Dans la mesure où le nuage de points mesurés donne directement la position du sol, la modélisation de la topographie peut être relativement simple, si l'opérateur a identifié correctement les objets levés. Les tailles de fichiers à gérer sont relativement modestes puisqu'il ne s'agit que de quelques mégabytes.
Par contre, le levé D-GPS souffre principalement d'une productivité limitée. La précision atteignable en pratique lors de la revisite d'un point est de l'ordre 5cm avec le système D-GPS Trimble 4800.
Le scanner laser est un instrument plus lourd à mettre en œuvre nécessitant 2 à trois opérateurs sur le terrain. Sa productivité est énorme : 3 millions de points mesurés en 30 minutes. On peut facilement réaliser 6 à 8 stations en une journée. Lorsque les cibles grâce auxquelles le scanner se repère sont localisées précisément avec un tachéomètre, la position des points mesurés peut être précise à 1-2 cm près. Si elles
Comparaisons des techniques topographiques de suivi de glissement de terrain Montagne de Reims en Champagne Ardenne
104 BRGM/RP-54688-FR – Rapport final
sont localisées moins précisément, avec un D-GPS, comme ce fut le cas dans cette étude, la précision peut se dégrader jusqu'à 5 cm.
Les points négatifs de cette technique concernent la visibilité du sol et la structure du terrain. Si les obstacles visuels sont nombreux, un grand nombre de stations seront nécessaires pour couvrir les zones d'ombre. Si le terrain est en terre nue sans obstacle, un petit nombre de stations sera nécessaire et le post-traitement sera grandement facilité. La lourdeur des traitements à appliquer pour obtenir une topographie fine, sans autre objet que le sol dépend également de la complexité du terrain et de la couverture.
La présence d'objets au dessus de la surface du sol (poteaux électriques, murs, piquets de vigne) n'a pas été exploitée dans cette étude mais pourrait être utilisée pour suivre le mouvement horizontal du sol. Cependant, les logiciels permettant d'explorer et mesurer des objets dans des nuages de millions de points sont très coûteux en temps d'apprentissage et en argent.
La photogrammétrie haute résolution est la solution qui offre un compromis entre une productivité moyenne, une surface couverte assez grande et un temps d'acquisition extrêmement réduit. Par contre le phénomène étudié doit être compatible avec la précision relativement limitée de la technique. Le positionnement de l'appareil au moment de la prise de vue requiert une grande quantité de points d'appuis dont la position est connue à 1cm près.
Tout comme le laser, la photogrammétrie ne peut mesurer l'altitude que de ce qui est visible depuis le ciel. Si le sol est couvert de végétation, les altitudes mesurées seront celle du sommet de la végétation. Le laser peut circonvenir ce problème en occupant plusieurs stations et en contournant les obstacles. Ceci n'est pas envisageable avec un système aéroporté.
De toutes les techniques, c'est la photogrammétrie basse altitude qui est la plus lourde à traiter. Pour le GPS, on dispose directement des coordonnées du sol en des points discrets. Pour le laser, moyennant filtrage des points parasites, on peut retrouver un nuage de points décrivant le sol relativement correctement. Avec la photogrammétrie, on part de photos aériennes montrant la réalité en continu. Il est nécessaire d'identifier des points pour en calculer les coordonnées puis de les filtrer pour ne retenir que ceux qui ont atteint le sol.
En conclusion, aucune technique ne surpasse les autres, elles ont toutes des avantages qu'il faut examiner à l'aune de la taille du terrain à lever, du taux de déplacement du phénomène à suivre, de la main d'œuvre disponible pour réaliser le levé et pour traiter les données et des infrastructures disponibles. Il faut tout de même noter que les données acquises par laser demandent encore des développements pour devenir opérationnelles dans un cadre tel que celui de la Montagne de Reims.
Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 105
9. Bibliographie
Casson B., (2004). Apport de l’imagerie optique haute résolution pour l’étude 3D des glissements de terrain. Thèse. Université Claude Bernard Lyon I. 278 p.
Casson, B., Delacourt, C., Baratoux, D., and Allemand P., (2003), Seventeen years of the “la Clapiere” landslide evolution analysed from ortho-rectified aerial photographs. Eng. Geology, 68-1-2, pp123-139
Casson, B., Delacourt, C., Allemand,P., (2005), Contribution of multi-temporal remote sensing images to characterize landslide slip surface – Application to the La Clapière landslide (France), Natural Hazards and Earth System Sciences, 5, 425-437
Delacourt, C., Allemand, P., Casson, B., Vadon, H., (2004), Velocity field of the "La Clapière" landslide measured by the correlation of aerial and QuickBird images, Geophysical Research Letter, 31,L15619
Kraus, K., and P. Waldhausl, 1998, Manuel de photogrammétrie principes et procédés fondamentaux: Paris, Hermès Science.
Kraus, K., 1993, Photogrammetry volume 1: fundamentals and standard processes: Bonn, Dummler Verlag.
Kraus, K., 1997, Photogrammetry volume 2: advanced methods and applications: Bonn, Dummler Verlag.
Mikhail, E. M., J. S. Bethel, and J. C. McGlone, 2001, Introduction to modern photogrammetry: London, John Whiley and sons.
Webster, R. & Oliver, M.A., 2001, Geostatistics for environemental scientists, John Whiley & sons, collection Statistics in Practice, Londres, 271 p.


Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 107
Annexe 1
Analyse géostatistique des données GPS à Champillon


Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 109

Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 111
Annexe 2
Potentiels et limitations de l’imagerie aérienne haute résolution (Drone, Hélicoptère
radiocommandé) et fixe pour la caractérisation des mouvements de surface sur la Montagne de
Reims
Rapport de Image Sarl


Comparaisons des techniques topographiques de suivi de glissement de terrain. Montagne de Reims en Champagne Ardenne
BRGM/RP-54688-FR – Rapport final 113

Centre scientifique et technique
Service aménagement et risques naturels 3, avenue Claude-Guillemin
BP 6009 – 45060 Orléans Cedex 2 – France – Tél. : 02 38 64 34 34