Embed Size (px)
Citation preview
Orasi Ilmiah
Metode Asimilasi Data:
Salah Satu Penerapan Matematika dalam
Bidang Lingkungan Hidup
Oleh
Erna Apriliani
Disajikan dalam rangka Pengukuhan Guru Besar
dalam bidang Analisis Fungsional dan Asimilasi
Data
Jurusan Matematika
Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Teknologi Sepuluh Nopember - Surabaya
Departemen Pendidikan dan Kebudayaan
Republik Indonesia
Surabaya, 22 Oktober 2014
1
Assalamu alaikum warrahmatullaahi wabarakaatuh
Yang terhormat bapak Rektor dan para Wakil Rektor
ITS
Yang terhormat Bapak, Ibu anggota Senat ITS
Yang terhormat Bapak, Ibu Pimpinan di lingkungan ITS
Yang terhormat Ibu-ibu Dharma Wanita Persatuan ITS
Bapak, Ibu tamu undangan, sejawat, kerabat, sahabat
dan teman-teman serta segenap civitas akademika ITS.
Alhamdulillaahi Rabbil alamiin, puja dan puji syukur
kita panjatkan ke hadirat Allah SWT yang telah
melimpahkan Rahmat dan nikmat Nya berupa keimanan
dan kesehatan pada kita semua sehingga kita dapat
menghadiri acara pengukuhan Guru Besar ini.
Terima kasih saya ucapkan pada Bapak, Ibu hadirin
semuanya yang telah meluangkan waktu untuk
menghadiri acara ini.
Pada kesempatan yang berbahagia ini, perkenankan
saya untuk menyampaikan orasi ilmiah yang berjudul:
Metode Asimilasi Data:
Salah Satu Penerapan Matematika dalam Bidang
Lingkungan Hidup
Para hadiri yang saya hormati,
Dalam perkembangannya matematika secara garis
besar terbagi dalam tiga kelompok yaitu matematika
murni yaitu kajian matematika untuk perkembangan

2
matematika saja tanpa perlu mengetahui apa
manfaatnya untuk ilmu lain, maupun teknologi. Yang
kedua adalah matematika terapan adalah kajian
matematika dengan mengambil penerapan dalam
bidang teknologi, lingkungan ataupun industri,
sedangkan yang ketiga adalah ilmu komputer. Pada
bidang ini perkembangan matematika digunakan untuk
mengembangkan teknik komputasi dan komputer.
Bidang yang saya tekuni adalah bidang matematika
murni dan matematika terapan terutama analisis
fungsional, asimilasi data.
Bidang Analisis yang saya tekuni dan Aljabar
merupakan bidang yang sulit dan tidak menarik
menurut besar sebagian mahasiswa matematika di
Indonesia dan mungkin juga di dunia, hanya sedikit
yang mau mempelajari bidang tersebut. Dalam bidang
analisis dikaji tentang konvergensi barisan yang sangat
diperlukan dalam bidang komputasi maupun
pemrograman. Sedangkan topik penelitian yang saya
dalami adalah Metode Asimilasi Data: Pengembangan
Algoritma dan Penerapannya.
Metode Asimilasi Data
Metode Asimilasi Data adalah suatu metode untuk
mengestimasi parameter atau variabel keadaan (suatu
keadaan) dengan cara menggabungkan antara model
matematika dan data-data pengukuran.

3
Dalam metode asimilasi data jumlah data pengukuran
yang diperlukan jauh lebih sedikit dibandingkan dengan
cara estimasi secara statistik murni, selain itu hasil
estimasi jauh lebih baik jika dibandingkan estimasi
yang berdasarkan model matematika saja, karena
metode asimilasi data dapat beradaptasi untuk sistem
dengan pengaruh luar yang sangat fluktuatif.
Salah satu metode asimilasi data adalah filter Kalman.
Filter Kalman pertama kali ditulis oleh R.E. Kalman,
1960 [Lewis, 1986] dan diterapkan dalam masalah
navigasi pesawat. Dalam perkembangannya filter
Kalman telah diterapkan pada masalah hidrologi,
seperti estimasi ketinggian gelombang laut [Heemink,
1986], pasang surut air laut [Verlaan, 1997], ketinggian
air sungai [Apriliani, 2001], masalah meteorologi
seperti estimasi kerusakan ozon, masalah lingkungan
seperti estimasi penyebaran limbah cair dalam air
tanah [Apriliani, 2011a], estimasi penyebaran polutan
di udara[Apriliani, 2011b].
Pada saat menerapkan filter Kalman untuk masalah-
masalah real, terdapat beberapa kendala karena
sistem real tersebut mempunyai model matematika
yang tidak linear, sedangkan filter Kalman dapat
bekerja optimal untuk sistem yang linear.
Pengembangan algoritma filter Kalman dilakukan untuk
mengantisipasi kendala-kenadala tersebut, selain untuk
meningkatkan akurasi hasil estimasi dan mengurangi
waktu komputasi.

4
Algoritma filter Kalman mempunyai dua langkah yang
dilakukan secara recursif, yaitu tahap prediksi dan
tahap koreksi [Lewis, 1986]. Algoritma filter Kalman
dapat dinyatakan pada Gambar 1.
Inisialisasi
Tahap Prediksi
Kovarian kesalahan
Estimasi
Tahap Koreksi
Kalman Gain
Kovarian kesalahan
Estimasi
0k xP P0
ˆkx x
T
kkk
T
kkkk GQGAPAP
1ˆ
kkkkk uBxAx
ˆˆ
1
1
1 1 1 1 1 1 1
T T
k k k k k k kK P H H P H R
1 1 1 1k k k kP I K H P
1 1 1 1 1 1ˆ ˆ ˆ
k k k k k kx x K z H x
KALMAN FILTER
Gambar 1. Skema Algoritma Filter Kalman
Beberapa contoh pengembangan algoritma filter
Kalman antara lain Extended Kalman Filter (EKF),
Reduced Rank Square Root Filter (RRSQRT Filter)
[Verlaan,1998], Reduced Rank Square Root Information
Filter(RRSRIF)[Apriliani,2002], Ensemble Kalman
Filter(EnKF)[Burger 1998, Evensen, 1994], Hybrid Filter
dan Unscented Kalman Filter (UKF) [Julier,S. 1995]
Extended Kalman Filter merupakan metode estimasi
untuk sistem tak linear. Dalam Extended Kalman Filter
(EKF) dilakukan pelineran terhadap fungsi tak linear
dengan menggunakan deret Taylor, sehingga diperoleh
matriks Jacobi dari sistem tersebut.
5
Pada Reduced Rank Square Root Filter (RRSQRT Filter)
dan Reduced Rank Square Root Information Filter
(RRSRIF) dilakukan reduksi rank atau pengurangan
ukuran matriks kovariansi kesalahan estimasi dengan
cara membentuk matriks kovariansi kesalahan estimasi
kedalam bentuk matriks dekomposisi nilai singular
(SVD) [Verlaan, 1998 Apriliani, 2002]. Tujuan dari
reduksi rank adalah untuk mengurangi waktu komputasi
tanpa mengurangi tingkat akurasi. Pada kedua
algoritma tersebut, dibutuhkan teori tentang
komputasi matriks dan konvergensi algoritma yang
merupakan bagian utama dalam bidang matematika.
Untuk sistem dengan model matematika tak linear
dikembangkan algoritma Ensemble Kalman Filter
(EnKF) dan Unscented Kalman Filter (UKF). Pada
Ensemble Kalman filter, dibangkitkan (dilakukan
duplikasi) kondisi awal estimasi sebanyak N buah,
selain itu juga dibangkitkan sejumlah N buah untuk
hasil estimasi dan data-data pengukuran.
Pembangkitan ensemble tersebut didasarkan pada
distribusi normal Gauss dengan mean estimasi awal
nol dan kovariansi 𝑄𝑘 [Evensen, 1994, Burgers, 1998].
Sedangkan pada Unscented Kalman filter dilakukan
tranformasi Unscented untuk meningkatkan akurasi
hasil estimasi [Julier, 1995, Kandepu, 2008]. Peranan
matematika sangat dominan dalam pengembangan
algoritma tersebut.
Penggunaan Ensemble Kalman filter jauh lebih mudah
dibandingkan dari Unscented Kalman filter, oleh

6
karena itu Ensemble Kalman filter lebih sering
digunakan dalam berbagai penyelesaian masalah
estimasi.
Hadirin yang saya hormati, Metode Asimilasi Data,
khususnya Kalman filter telah digunakan untuk
melakukan estimasi ketinggian gelombang laut di
Belanda [Heemink, 1986]
Gambar 2. Penahan Badai di Eastern Scheldt, Belanda
[Heemink, 1986]
Belanda berada dibawah laut dan mempunyai dam
sebagai pembatas daratan dan laut. Pada tahun1953
terjadi banjir yang cukup luas karena badai dari
gelombang laut. Muara sungai mempunyai pintu yang
harus ditutup saat terjadinya gelombang laut yang
cukup tinggi (terjadi badai) dan di buka sebagai sarana
keluar masuk kapal dari sungai ke laut. Oleh karena itu
diperlukan estimasi ketinggian gelombang sehingga
7
dapat dilakukan buka tutup pintu dam tersebut secara
tepat [Heemink, 1986]. Selain itu ketinggian air laut
pasang yang cukup tinggi juga menyebabkan banjir di
daratan Belanda. Kalman filter juga telah diterapkan
untuk mengestimasi ketinggian pasang surut air laut
[Verlaan,M, 1997].
Hadirin yang saya hormati, pada kesempatan ini saya
akan memberikan sedikit paparan penerapan filter
Kalman dan modifikasinya pada masalah estimasi
penyebaran polusi air tanah dan estimasi polusi udara
Estimasi Penyebaran Polusi Air Tanah
Air tanah merupakan hal yang penting untuk
kehidupan kita dan juga lingkungan kita. Kondisi air
tanah dipengaruhi oleh keadaan disekitar daerah
tersebut antara polusi dari industri/pabrik, polusi
sungai (Gambar 3). Air tanah yang tercemar akan
mempengaruhi kesehatan manusia dan makhluk hidup
maka estimasi konsentrasi polusi air tanah perlu
dilakukan. Estimasi konsentrasi polusi air tanah dengan
menggunakan metode asimilasi data dapat dilakukan
dengan cara seperti pada Gambar 4 [Apriliani, 2011a]:
- Membentuk model matematika penyebaran
polusi air tanah
- Menyusun persamaan pengukuran berdasarkan
data pengukuran/lokasi pengukuran konsentrasi
polusi air tanah

8
- Melakukan simulasi dengan menggunakan
metode asimilasi data khususnya filter Kalman
dan modifikasinya
ESTIMASI PENYEBARAN LIMBAH PADA AIR TANAH
Latar Belakang
Metode asimilasi data
Gambar 3. Kaitan antara kualitas air tanah dan lingkungan
Metodologi
Estimasi
parameter &
variabel
keadaaan
Masalah
penyebaran polutan
pada air tanah
pendiskritan
Penentuan Lokasi,
Titik sampel 8 lokasi
Ambil Sampel air sumur
Simulasi:
4-D Variasional
Filter Kalman
Lab Model ITS lapangan
kk
kkk
HCz
BuACC
1
Lab Lingkungan; ukurkonsentrasi :Fe, Mn,
Cn
t
C
y
Cv
x
Cv
y
CD
x
CD yxyx
2
2
2
2
Gambar 4. Metodologi Estimasi Polusi Air Tanah

9
Berdasarkan data konsentrasi polutan pada delapan
lokasi dilakukan estimasi untuk 100 lokasi.
Pengambilan data konsentrasi pada 8 lokasi dan
estimasi dilakukan secara rekursif untuk menghasilkan
hasil estimasi yang optimal. Hasil simulasi dapat dilihat
pada Gambar 5 dan 6.
Gambar 5. Hasil simulasi estimasi konsentrasi polutan
Gambar 6. Kontur konsentrasi polutan
10
Dari penelitian tersebut dapat disimpulkan bahwa
- Metode Asimilasi Data dapat diterapkan untuk
mengestimasi penyebaran polusi air tanah
secara real time
- Hasil Estimasi akan optimal jika penentuan
titik sample tepat (system observable)
- Dengan mengestimasi dapat diketahui
konsentrasi polutan pada semua titik dilokasi
dengan berdasarkan data sample tertentu
Selanjutnya, saya akan memaparkan penerapan
metode asimilasi data untuk estimasi polusi udara
[Apriliani, 2011b].
Estimasi Penyebaran Polusi Udara
Kita tahu bahwa polusi udara merupakan masalah yang
muncul pada daerah perkotaan dan daerah industri.
Kepadatan kendaraan bermotor serta polusi dari pabrik
mempunyai kontribusi polusi udara yang cukup
signifikan. Untuk mengatasi atau mengurangi kadar
polutan tersebut terlebih dahulu diperlukan estimasi
konsentrasi polutan dan penyebarannya di udara.
Karena mahalnya alat tersebut serta besarnya biaya
perawatan maka tidak dapat ditempatkan sebanyak
mungkin alat untuk mengukur konsentrasi polutan.
Oleh karena itu estimasi konsentrasi polutan sangat
diperlukan selain untuk meramalkan konsentrasi
polutan pada waktu yang akan datang juga untuk

11
mengestimasi konsentrasi polutan pada daerah yang
tidak termasuk radius alat ukur tersebut.
Pada kesempatan ini akan diestimasi jenis CO yang
disebabkan asap kendaraan, dan industri terutama
industri besi dan baja. Jumlah CO yang melebihi
ambang baku mutu lingkungan akan memberikan
dampak negatif pada manusia khususnya mengurangi
pengangkutan oksigen dalam darah.
Persamaan konsentrasi polutan di udara dalam dua
dimensi atau yang dikenal dengan nama model difusi
Gauss dapat dituliskan sebagai berikut (Nevers, 1995,
Hanea,2005 ):
y
CDCU
yx
CDCU
xtC
yyxx (1)
dengan C konsentrasi polutan, yx DD , masing-masing
adalah koefisien difusi pada arah x dan y sedangkan
yx UU , masing-masing merupakan kecepatan angin
pada arah x dan y .
Adapun langkah-langkah dalam melakukan penelitian
adalah
a. Melakukan pendiskritan daerah penelitian dan model
matematika
b. Membentuk persamaan menjadi bentuk ruang keadaan
(state space) kk AXX 1 , dengan
Tkkkkkkk
k CCCCCCCX 10,101,1010,21,210,12,11,1 ............

12
sedangkan 𝐴 merupakan matriks konstan berukuran 100
x 100 yang diperoleh dari proses pendiskritan.
c. Mendefinisikan persamaan pengukuran
kk HXZ
Bentuk matriks H merepresentasikan posisi dimana
alat ukur tersebut diletakkan atau pada posisi yang
mana data pengukuran diperoleh. Misalnya
00...01H berarti alat ukur ada satu dan
diletakkan pada posisi titik (1,1).
d. Melakukan Simulasi
Dengan melakukan pengukuran konsentrasi polutan di
udara pada lima posisi seperti Gambar 7 maka dapat
diestimasi konsentrasi polutan di 100 posisi.
Gambar 7. Peta Kota Surabaya dan pendiskritannya
13
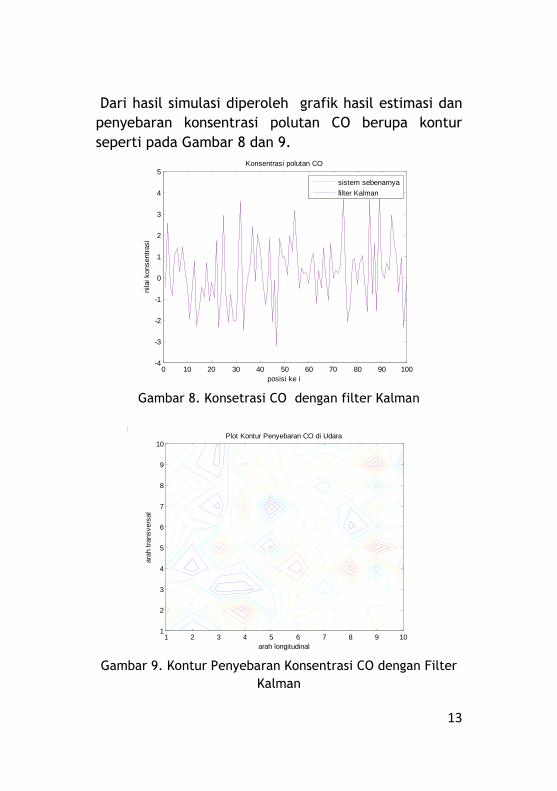
Dari hasil simulasi diperoleh grafik hasil estimasi dan
penyebaran konsentrasi polutan CO berupa kontur
seperti pada Gambar 8 dan 9.
Gambar 8. Konsetrasi CO dengan filter Kalman
Gambar 9. Kontur Penyebaran Konsentrasi CO dengan Filter
Kalman
0 10 20 30 40 50 60 70 80 90 100-4
-3
-2
-1
0
1
2
3
4
5Konsentrasi polutan CO
posisi ke i
nila
i konsentr
asi
sistem sebenarnya
filter Kalman
Plot Kontur Penyebaran CO di Udara
arah longitudinal
ara
h t
ransvers
al
1 2 3 4 5 6 7 8 9 101
2
3
4
5
6
7
8
9
10

14
Pada filter Kalman diperlukan estimasi awal 0C untuk
memprediksi satu satuan waktu kedepan )(1 C
, pada
waktu 1k diperoleh data pada 5 lokasi tersebut ,
dan berdasarkan data tersebut digunakan untuk
memperbaiki hasil prediksi konsentrasi waktu ke 1,
yaitu 1C
untuk 100 lokasi. Estimasi 1C
digunakan untuk
memprediksi konsentrasi waktu ke 2 )(2 C
dan
seterusnya antara prediksi dan koreksi dilakukan secara
terus menerus. Hal ini mengakibatkan data terurut
waktu yang diperlukan untuk mengestimasi hanya satu
satuan waktu sebelumnya. Oleh karena itu sebenarnya
estimasi yang dilakukan dengan menggunakan filter
Kalman dapat merupakan estimasi on line apabila
tersedia interface antara data pengukuran dan
computer yang menjalankan simulasi.
Tampak dalam paparan saya tadi bahwa matematika
dapat diterapkan untuk menyelesaikan masalah
estimasi ketinggian air laut, estimasi penyebaran polusi
air tanah dan estimasi penyebaran konsentrasi polusi
udara. Selain itu beberapa peneliti dalam hal ini
matematikawan telah melakukan penerapan asimilasi
data dalam estimasi ketinggian air sungai, kerusakan
ozon. Tentu saja matematikawan tersebut tidak
bekerja sendirian tetapi bekerja sama dengan ahli-ahli
untuk bidang yang terkait.
15
Selain mengembangkan matematika untuk digunakan
pada ilmu dan bidang lainnya. Matematikawan juga
mengembangkan matematika tanpa memperhatikan
ilmu dan bidang lainnya, tetapi untuk matematika
sendiri, manfaat perkembangan matematika tersebut
dapat dirasakan setelah beberapa tahun kemudian.
Mempelajari matematika akan melatih logika berfikir
secara matematis yang sangat membantu
matematikawan dalam menekuni ataupun berkarya di
bidang teknologi, industri, keuangan maupun
komputasi dan pengembangan perangkat lunak.
Hadirin yang saya hormati,
Sebelum mengakhiri orasi ilmiah ini, perkenankan saya
bercerita sedikit tentang cita-cita saya.
Pada saat SD saya mengikuti kelompok drama anak-
anak yang dikenal dengan nama Teater Kelinci.,
pimpinan Hardjono, W.S. Salah satu cerita yang pernah
kami tampilkan adalah Air Prawitasari, yang
menceritakan bagaimana Bimasena mencari air
kehidupan atau mencari ilmu bagi pelajar atau siswa.
Pada akhir cerita drama tersebut setiap anak di
haruskan memilih tulisan tentang profesi atau cita-cita
kami.
Pada pentas pertama saya memilih tulisan Guru, dan
meneriakkan “ Cita-cita ku jadi Guru”. Pentas kedua
saya mengambil tulisan Cita-citaku jadi Dosen, setelah
mengetahui dosen adalah gurunya mahasiswa. Pada
pentas-pentas selanjutnya berubah, saya mengambil

16
tulisan cita-citaku jadi Profesor, karena menurut yang
saya ketahui Profesor adalah gurunya guru.
Alhamdulillah, atas karunia Allah SWT, saat ini saya
mendapatkan kepercayaan untuk mengemban amanah
sebagai guru besar matematika, seperti yang saya cita-
citakan sejak sekolah dasar. Semoga Allah memberi
kekuatan pada saya agar tetap bisa berkarya dalam
bidang matematika dan terapannya serta dapat
menjadi guru yang memberi manfaat bagi pendidikan
di Indonesia.
Ucapan Terima Kasih
Jabatan guru besar ini dapat tercapai berkat dorongan,
bantuan dan kerjasama dari berbagai pihak. Oleh
karena itu saya sampaikan terima kasih yang sebesar-
besarnya kepada
1. Bapak dan Ibu saya, Bapak Isaak dan Ibu
Suwarni yang telah merawat saya sejak kecil
sampai dewasa, mendampingi saya dan
keluarga, saat saya menempuh program doktor
di ITB, serta memberi dorongan pada saya
untuk berkarya dan mengabdi di ITS.
2. Suamiku, Mas Tamaji yang selalu memberi
kesempatan dan mendorong saya untuk
melaksanakan pekerjaan dengan sebaik-baiknya
3. Anak-anakku Gama Nuur Aji Firdayani, Fadhli
Imanuddin Aji Romadhoni serta Erliani Inayah
Aji Romadhona yang mau memahami atas
kesibukan ibunya.
17
4. Kakak ku Ismujianto beserta istrinya Sri
Danaryani, Dwi Indrawan, Adikku Nana dan Nani
sekeluarga, terima kasih atas suasana
keakrabannya dan kekeluargaannya.
Tak lupa ucapan terima kasih juga kepada
bapak Ibu guru saya
5. Alm. Bapak Slamet guru SDN Tembok Dukuh I.
6. Bp Ruseno, Bp Mulyono, bapak guru sewaktu
saya di SMPN 3 Surabaya.
7. Bp. Arthur Pinontoan dan Bp. Didiet, bapak
guru sewaktu saya di SMAN 9 Surabaya.
8. Bapak Achmad Subijanto, Bapak Bambang
Sumantri, Prof. Sugimin guru-guru saya di ITS.
9. Prof. Wono Setyabudhi sebagai pembimbing
saya saat mengambil program Magister di ITB.
10. Prof. M Ansjar, Alm Prof. S.N. Nababan , Prof.
Iwan Pranoto, dan Prof. Robert Saragih, sebagai
promotor dan co promotor pada saat saya
mengambil program doktor di ITB.
11. Prof Ir. A.W. Heemink, co promotor dalam
bidang filter Kalman serta memberi kesem-
patan dan dana untuk melakukan penelitian di
TU Delft Belanda.
12. Prof. G.J. Olsder yang membimbing dalam
workshop matematika sistem dan estimasi
optimum di TU Delft Belanda.
13. Prof. Dr. Sri Wahyuni dari UGM yang selalu
memberi motivasi untuk mengembangkan
matematika.
18
14. Alm Mas Hardjono, W.S. pimpinan teater Kelinci
yang mengajari saya untuk berani maju.
15. Alm Bp Tamhida yang tekun mengajari mengaji.
Ucapan terima kasih tak lupa kami sampaikan
kepada :
1. Prof. Dr. Muhammad Nuh, DEA sebagai Menteri
Pendidikan dan Kebudayaan yang memberi
kepercayaan pada saya untuk mengemban gelar
guru besar
2. Prof. Dr. Ir. Triyogi Yuwana, DEA sebagai rektor
ITS yang memberi kesempatan pada saya untuk
mengajukan kenaikan pangkat menjadi Guru
Besar
3. Para Wakil Rektor, yang telah memfasilitasi
saya untuk berkarya dan mengajukan kenaikan
pangkat.
4. Anggota Senat Komisi Guru Besar yang memberi
kesempatan untuk mempresentasikan visi dan
misi kelanjutan penelitian saya.
5. Dekan FMIPA ITS, Prof. Dr. R.Y. Perry Burhan,
MSc dan Wakil Dekan FMIPA ITS, Dr. Mahmud
Yunus, MSi yang memberi dorongan dan
motivasi untuk mengajukan kenaikan pangkat
6. Prof. Dr. Budi Nurani, M.Si dari UNPAD yang
merupakan ketua IndoMS dan sahabat saat
mengambil program Doktor di ITB, Prof. Dr.
Dyah Erny dari Universitas Tarumanegara
7. Rekan-rekan Dosen Jurusan Matematika FMIPA
ITS atas kerjasamanya selama saya mengabdi

19
8. Semua tenaga akademik Jurusan Matematika
FMIPA ITS yang membantu pelaksanaan
pekerjaan saya selama ini.
Demikianlah orasi ilmiah yang dapat saya sampaikan,
terima kasih atas perhatiannya dan mohon maaf atas
segala salah dan khilaf.
Wassalamu alaikum warahmatullaahi wabarokaatuh
Pustaka
1. Apriliani, E., 2001, “The Estimation Of The
Water Level By The Reduced Rank Square Root
Information Filter”, Proceedings of the Asia –
Pasific Vibration Conference, vol II, Jilin
Science and Technology Press, China
2. Apriliani, E., 2002, “Reduksi Rang pada Filter
Informasi Akar Kuadrat dan Modifikasi Filter
Kovariansi Akar Kuadrat Rang Tereduksi untuk
Sistem Berderau Vektor”, Disertasi
3. Apriliani,E.,Sanjoyo, B.A., Adzkiya, D., 2011a,
“The Groundwater Pollution Estimation by the
Ensemble Kalman Filter”, Canadian Journal on
Science and Engineering Mathematics, June,
2011
4. Apriliani,E.Hanafi,L.,Wahyuningsih,N.,2011b,
“Metode Estimasi Penyebaran Polutan”, Jurnal
Purifikasi, Vol 12. No 2, Desember 2011

20
5. Lewis, L. F., 1986, “Optimal Estimation, with
an introduction to stochastic control theory”,
John Wiley and Sons, New York.
6. Burgers, G., van Leeuwen, P.J., and Evensen,
G., 1998, “Analysis Scheme in the Ensemble
Kalman Filter”, Monthly Weather Review, Vol:
126, pp:1719-1724.
7. Evensen, G., 1994, “Sequential Data
Assimilation with a nonlinear quasi-geostrophic
model using Monte Carlo methods to forecast
error statistic”. J. Geophys, Vol 99, page
10.143 - 10.162, 1994
8. Evensen, G., 2004, “Sampling Strategies and
square root analysis schemes for the Ensemble
Kalman Filter (EnKF)”, Hydro Research Centre.
9. Hanea, R., 2005,”Data Assimilation Concept
and The Kalman Filter Approach”, Bahan RWS,
TU Delft.
10. Heemink, A.W., 1986, “Storm surge prediction
using Kalman filtering”, Thesis, Twente
University, The Netherlands
11. Heemink, A.W., 1990, “Data Assimilation For
Non Linear Tidal Models”, International Journal
for Numerical Methods in Fluids 1990
12. Heemink, A.W., Verlaan, M. and Segers, A.J.,
2004,”Variance reduced Ensemble Kalman
Filter”, Delft University of Technology.
13. Julier, S., Uhlmann, J dan Durrant-Whyte, H.,
1995, “A new approach for filtering nonlinear
systems”, Proceedings of the 14th IEEE
21
American Control Conference, Seattle, WA, hal.
1628–1632
14. Kandepu, R., Foss, B. dan Imsland, L. ( 2008),
“Applying the unscented Kalman filter for
nonlinear state estimation”, Journal of Process
Control, Vol. 18, hal. 753-768.
15. Nevers, N.D., 1995, “Air Pollution Control
Engineering”, McGraw-Hill, Inc, New York
16. Verlaan,M., Heemink, A.W. 1997, “Tidal Flow
Forecasting Using Reduced Rank Square Root
Filters”, Stochastic Hydrologi and Hydraulics,
No.11 : pp. 349-368
17. Verlaan, M., 1998, “Efficient Kalman filtering
for Hydrodynamic Models”, PhD Thesis, Delft
University of Technology

22
DAFTAR RIWAYAT HIDUP
A. Data pribadi
Nama : Erna Apriliani
Tempat/tanggal lahir : Surabaya, 14 April 1966
Alamat rumah : Simo Sidomulyo 7A/70
Surabaya
Telp./HP : 081358246437
Alamat kantor : Jurusan Matematika FMIPA ITS
Telp./Faks : 031-5943354 / 031-5996506
Alamat e-mail : [email protected];
Profesi : Dosen
Jabatan structural : Ketua Jurusan Matematika
Nama Suami : Tamaji
Nama Anak : - Gama Nuur Aji Firdayani
- Fadhli Imanuddin Aji
Romadhoni
- Erliani Inayah Aji Romadhona
B. Riwayat pendidikan
SD Negeri Tembok Dukuh I Surabaya, tahun 1972-
1979
SMP Negeri 3 Surabaya, tahun 1979-1982
SMA Negeri 9 Surabaya, tahun 1982-1985
Program Sarjana Jurusan Matematika ITS, tahun
1985-1989
Program Magister Jurusan Matematika ITB, tahun
1992-1995
23
Program Doktor Jurusan Matematika ITB (Sandwich
ITB-TU Deflt), tahun 1998-2002
C. Riwayat pekerjaan
Dosen Jurusan Matematika FMIPA ITS, tahun 1999
sampai sekarang
Koordinator Prodi Magister Matematika FMIPA ITS,
tahun 2003-2007
Ketua TPB-ITS, tahun 2007-2009
Ketua UPMB-ITS , tahun 2009-2011
Ketua Jurusan Matematika FMIPA ITS, tahun 2011 –
sekarang
Ketua Panitia Pelaksana Pre Test dan Pra Matrikulasi
Program Kerjasama Depag-ITS Tahun Akademik
2007/2008
Tim Penilai dan Verifikasi Beban Kerja Dosen
(Asesor) Di Lingkungan ITS, 2008 - sekarang
Tim Pembuat Soal SNMPTN 2008-2009
Tim Pembuat Soal Ujian Masuk PTN Kerjasama
Depag, 2008-2009
Tim Peer Review Jurnal Bagi Dosen Yang
Mengusulkan Kenaikan Jabatan Fungsional, 2008
Tim Penyusun Kurikulum Institut Teknologi Sepuluh
Nopember Tahun 2009-2014
Tim Pengembangan Kurikulum 2009-2014 Jurusan
Matematika FMIPA-ITS,2008
Tim Ad Hoc Bidang Perumusan Revitalisasi Program
TPB dan Jurusan MKU Komisi Akademik Senat
Institut, 2009
Panitia International Conference on Mathematics-
Statistics and Its Application, Bali 2012
24
Panitia South East Asian Conference Mathematics
and Its Applications (SEACMA), Surabaya, 2013
Ketua panitia Konferensi Nasional Matematika XVI,
Surabaya, Juni 2014
Pemateri pada CIMPA-School, Institut Teknologi
Bandung, September 2014
D. Riwayat jabatan
Kepangkatan :
- Penata Muda (CPNS)/IIIa, tanggal 01-02-1991
- Penata Muda/IIIa, tanggal 01-07-1992
- Penata Muda Tingkat I/IIIb, tanggal 01-04-1997
- Penata/IIIc, tanggal 01-04-2000
- Penata Tingkat I /IIId , tanggal 01-04-2004
- Pembina / IV a, tanggal 01-04-2006
Jabatan Fungsional:
- Asisten Ahli, tanggal 01-10-1996
- Lektor, tanggal 01-01-2001
- Lektor Kepala, tanggal 01-02-2004
- Guru Besar, tanggal 01-06-2014
25
E. Pelatihan Profesional
Research and Workshop Estimasi Optimum, 1992,
TU Delft – Belanda
Research and Workshop Mathematical System
Theory, 1998, ITS
Worlwide Quality Assurance - South East Asia
QMS-IWA2 : 2007, di Tretes Jawa Timur Tanggal
6 Juni 2009
Pelatihan dan Ujian Nasional Ahli Pengadaan
Barang / Jasa Pemerintah, 2012, Unair
F. Penghargaan/Piagam
Penyaji Poster Terbaik pada Seminar Hasil
Penelitian Hibah Bersaing Tahun 2007, di Jakarta
Tanggal 31 Juli s/d 2 Agustus 2007
Tanda Penghargaan Dwidya Satya Perdana,
pengabdian sebagai PNS di ITS selama 20 tahun,
2011
Tanda Kehormatan Satyalancana Karya Satya ,
pengabdian 20 tahun sebagai PNS. 2012
G. Publikasi ilmiah
SEMINAR
1. Apriliani, E., (1999), Temperature Distribution of
The Rod Estimation Modeling by RRSQRT Filter,
Asia/ Pacific International Congress on Engineering
Computational Modeling and Signal Processing,
Proceeding ITB, pp.369-377, 1999.
26
2. Apriliani, E., (1999), Kalman Filtering for m-stage
Observable System, Proceeding of the SEAMS-UGM
International Conference on Mathematics and Its
Applications, Universitas Gajah Mada, pp.189-197,
1999.
3. Apriliani, E., (2000), Kestabilan Filter Kalman untuk
Sistem Terobservasi m-langkah, Proc Konperensi
Nasional X Mat ITB, 2000.
4. Apriliani, E., (2000), The Estimation of the One
Dimensional Temperature Distribution by the
Modification of the RRSQRT Filter, Prosiding Seminar
Matematika Nasional, Jurusan Matematika Institut
Teknologi Sepuluh Nopember, pp.57-64, 2000.
5. Apriliani, E., (2000) The Application of RRSRIF to
Estimate the Heat Distribution, Prosiding Seminar
MIPA 2000, Fakultas MIPA ITB, pp.184-190, 2000.
6. Apriliani, E. (2001), The Application of the Modified
RRSQRT Filter on One Dimensional Shallow Water
Problem, Symposium on the Mathematical Support
for Hydrodynamic Laboratories (LABMATH), 9-11
September 2001, ITB.
7. Apriliani, E., (2001), The Estimation Of The Water
Level By The Reduced Rank Square Root Information
Filter, Proceedings of the Asia-Pasific Vibration
Conference, Vol.II, pp.584-586, Jilin Science and
Technology Press, China, 2001.
8. Apriliani, E., (2002) Reduksi Rang pada Filter
Informasi Akar Kuadrat dan Modifikasi Filter
Kovariansi Akar Kuadrat Rang Tereduksi untuk Sistem
Berderau Vektor, Disertasi Program Doktor,
Matematika ITB
27
9. Kartikasari, F.D., Apriliani, E. (2004), Perbandingan
Metode Variasional Dan Filter Kalman Sebagai Teknik
Asimilasi Data, Seminar Pasca Sarjana ITS.
10. Apriliani, E., (2005), The Estimation of Water Level
in The estuary Area by Kalman Filter, Seminar Early
Warning System, ITS, 2005
11. Apriliani, E., Sanjaya, S., dan Kartikasari, F.D.,
(2004), Estimasi Ketinggian Air Tanah dengan
Menggunakan Asimilasi Data, Seminar Nasional
Matematika, Bali
12. Apriliani, E., (2005), RRSQRT Filter untuk Sistem
dengan Matriks A Tertentu, Seminar Pascasarjana
ITS, 2005
13. Apriliani, E., (2005) The Application of Data
Assimilation Method on Ground Water Pollution
Problem, International Conference on Applied
Mathematics-ICAM05, Bandung
14. Savitri, D., Apriliani, E., Winarko, M.S. (2006),
Penentuan Bifurkasi Hopf Dengan Kriteria Divergensi,
Seminar Nasional Pascasarjana VI, Surabaya
15. Dharmawati, N., Apriliani, E., dan Winarko, M.S.,
(2006), Analisa Stabilitas dari Model Dinamika Virus,
Seminar Nasional Pascasarjana VI, Surabaya
16. Apriliani, E., (2006), Kajian Analisis dalam Metode
Asimilasi Data, Simposium Matematika Analisis, ITS
17. Apriliani, E., Arif, D.K., Sanjoyo, B.A., (2007),
Reduksi Rank Pada Matriks-Matriks tertentu, Seminar
Nasional Matematika, Banjarmasin
18. Apriliani, E., Sanjoyo, B.A., Adzkiya, D., (2009),
Reduce Rank and Ensemble Kalman Filter: Analyse
and its Application, Proceding of National Seminar
on Applied Technology, Science, and Arts (1st
APTECS),Surabaya, 22 Dec. 2009, ISSN 2086-1931

28
19. Iriani, Apriliani,E., dan Winarko,M.S., (2007), Global
Analysis of Vertically Transmitted Disease,
Proceeding Joint Conference Indonesia-Malaysia on
Statistics and Mathematics, ITS
20. Putri, E. R.M., Apriliani,E., dan Utami, P.D., (2007),
Estimation of European Call Option using Optimal
Smoothing Method, Proceeding Joint Conference
Indonesia-Malaysia on Statistics and Mathematics,
ITS
21. Apriliani, E., Estimasi Permiabilitas dan Tekanan
Aliran pada Pengeboran dengan menggunakan
Ensemble Kalman Filter, Seminar Nasional
Matematika, Universitas Airlangga, 2008
22. Adzkiya, D., Apriliani, E., (2009), The Application of
Ensemble Kalman Filter to Estimate Heat
Conduction Distribution, dipresentasikan di
International Conference on Natural and Material
Sciences, 3-4 Juli 2009 di Banjarmasin
23. Adzkiya, D., Apriliani, E., (2009), The Reduce Rank
Ensemble Kalman Filter to estimate the Heat
Conduction Distribution, Seminar Nasional APTECS
2009, Desember 2009, ITS di Surabaya
24. Apriliani, E., Arif, D.K., Sanjoyo, B.A., (2010), The
Square Root Ensemble Kalman Filter to Estimate the
Concentration of Air Pollution, dipresentasikan pada
International Conference on Mathematics and
Applied Engineering Agustus, 2010, Kuala Lumpur,
Malaysia
25. Pancahayani,S., Subchan, Apriliani, E., (2011),
Estimation of Missile Trajectory using Ensemble
Kalman Filter Method (EnKF), Proceedings of The
International Conference on Numerical Analysis and
Optimization (ICeMATH 2011)

29
26. Herlambang,T., Apriliani,E., Cordova,H. dan
Mardlijah, (2011), Desain Pengendalian Ketinggian
Air dan Temperatur Uap pada Sistem Steam Drum
Boiler dengan Metode Sliding Mode Control (SMC),
Prosiding Seminar Nasional Penelitian, Pendidikan
Dan Penerapan MIPA,Fakultas MIPA, Universitas
Negeri Yogyakarta, 14 Mei 2011.
27. Subchan, Rifa’i, M., Apriliani, E, (2012), Analisa
Kestabilan Persamaan Gerak Roket Tiga Dimensi tipe
RKX-LAPAN, Seminar Nasional Matematika dan
Pendidikan Matematika FMIPA UNY
Yogyakarta, 10 November 2012
28. Hanafi,L., Apriliani,E., and Fadlilah,A. (2012),
Detecting Fouling In Heat Exchanger By Extended
Kalman Filter And Ensemble Kalman Filter Methods,
Proceeding International Conference on
Mathematics, ISBN 978-979-96152-7-5, Statistics and
its Applications 2012 (ICMSA 2012)
29. Iza, B. A., Apriliani, E., Sanjoyo, B.A. , Mukhlas,I.,
Utomo, B.U., (2013), Numerical Solution of One and
Two Dimensional Debris Flow by Using Finite
Difference Method, South East Conference on
Mathematics and Its Application, Surabaya
JURNAL
1. Apriliani,E., Pranoto, I, (2000), Perbandingan antara
Observer Deterministik dan Kalman Filter, MIHMI ITB
Vol 6 No 1, 2000.
2. Apriliani,E.,(2001),The Reduced Rank SRIF, Journal
Indonesian Mathematics Society (MIHMI), Vol.7, no
2. pp.39-48, 2001.
30
3. Apriliani,E., (2002), Masalah Penelusuran dengan
Menggunakan Wavelet, Jurnal Matematika atau
Pembelajarannya, th VII, 2002.
4. Yatini, Apriliani, E., Soetrisno, (2005), Penentuan
Koefsien Daya Angkat Pesawat Terbang Layang
Terhadap Gerakan Angin Vertikal, Jurnal LIMITS, J.
Math. and Its Appl. ISSN: 1829-605X, Vol. 2, No. 1,
May. 2005, 9-16
5. Adzkiya, D., Apriliani, E., Sanjoyo, B.A., (2006),
Perbandingan Algoritma Golub Kahan dan QR Simetri
untuk Dekomposisi Nilai Singular, Jurnal LIMITS, J.
Math. and Its Appl. ISSN: 1829-605X, Vol. 3, No. 1,
May. 2006, 19-24
6. Apriliani, E., Sugandi, B., (2007), Konstruksi matriks
Non Negatif Simetri dengan Spektrum Bilangan real,
LIMITS-Journal of Mathematics and Its Application,
Vol 4, No. 1, pp. 17-25, May 2007
7. Apriliani, E., Sanjaya,B.A. (2007), Reduksi Rank
pada Matriks-Matriks Tertentu, Jurnal LIMITS, J.
Math. and Its Appl. ISSN: 1829-605X, Vol. 4, No. 2,
Nov 2007, 1-8
8. Purnomo, K.D., Apriliani, E., (2008), Estimasi
Populasi Plankton dengan Ensemble Kalman Filter,
Jurnal Ilmu Dasar, 2008, Vol 9 No. 1.
9. Masduqi, A., Apriliani, E., (2008), Estimation of
Surabaya River Water Quality using Kalman Filter
Algorithm, IPTEK- the Journal for Technology and
Sciences, August 2008, Vol 19, No 3, pp. 87-91
10. Apriliani, E., Sanjoyo, B.A., Adzkiya, D.,(2011), The
Groundwater Pollution Estimation by the Ensemble
Kalman Filter, Canadian Journal on Science and
Engineering Mathematics, June, 2011
31
11. Apriliani, E. Hanafi, L., Wahyuniningsih, N., (2011),
Metode Estimasi Penyebaran Polutan, Jurnal
Purifikasi, Vol 12. No 2, Desember 2011
12. Apriliani, E., Budiono, W.S., (2011), Metode
Ensemble Kalman Filter untuk Mendeteksi Gangguan
pada Masalah Konduksi Panas Satu Dimensi, Jurnal
Matematika dan Sains, Vol 16. No 6, Desember 2011
13. Apriliani,E., Adzkiya, D., Baihaqi, A., (2011), The
Reduced Rank of Ensemble Kalman Filter to
Estimate the Temperature of Non Isothermal
Continue Stirred Tank Reactor , Jurnal Teknik
Industri, 2011
14. Apriliani,E., Subchan, Yunaini,F., and Hartini, S,
(2013), Estimation and Control Design of Mobile
Robot Position, Far East Journal of Mathematical
Sciences (FJMS), Vol 77, No 1, June 2013, pp 115-
124
15. Arif, D.K., Widodo, Salmah, Apriliani, E., (2014),
Construction of The Kalman Filter Algoritm on the
Model Reduction, International Journal of Control
and Automation, Vol 7 No 9, 2014, pp. 257-270
H. Penelitian dan Pengabdian kepada Masyarakat
PENELITIAN
Estimasi Distribusi Limbah Cair pada Air
Tanah dengan menggunakan Metode
Asimilasi Data, Hibah Bersaing XII, tahun
2004, 2005 dan 2006
Estimasi Permiabilitas dan Tekanan Aliran
pada Pengeboran dengan menggunakan
Ensemble Kalman Filter, Penelitian Dana
DIPA tahun 2008

32
Ensemble dan Reduksi Rank pada Kalman
Filter, Hibah Bersaing tahun 2009 dan tahun
2010
Kajian Karakteristik Metode Unscented
Kalman Filter dan Ensemble Kalman Filter,
Hibah PUM tahun 2011
Pemodelan dan Simulasi Penyebaran Aliran
Debris Dua Dimensi untuk Memprediksi
Daerah Rawan Bencana (Studi Kasus Aliran
lahar di Kali Gendol Lereng Merapi), Hibah
Unggulan Perguruan Tinggi tahun 20013 dan
2014
Pengabdian Kepada Masyarakat
Tenaga Pengajar pada Diklat Kapasitas Guru
Pemandu Mata Pelajaran Matematika Tingkat
SLTP Propinsi Jawa Timur, 2006
Tenaga Pengajar pada Diklat Fungsional Guru
Matematika Tingkat SLTP Propinsi Jawa
Timur, 2009
Tenaga Pengajar pada pelatihan kepada
Guru-guru SMK Mata Pelajaran Matematika
Master TOT, 2009
Petugas Pemantau E pada pelaksanaan Ujian
Nasional SMK Tahun Pelajaran 2009/2010
Kota Surabaya
Tenaga Pengajar Pelatihan Guru Mata
Pelajaran Matematika SMK Model (Teknologi)
se Indonesia, 2011
Tenaga Pengajar Pelatihan Olimpiade dan
Pengayaan Bahan Ajar SMA bagi Guru SMA
Kabupaten Lamongan, 2013
33
Tenaga Pengajar / Instruktur Pelatihan
Matematika bagi Tenaga Pendidik di SMP
Progresif Bumi Shalawat Tulangan Sidoarjo,
2013
I. Organisasi dan Keanggotaan
Anggota dari Himpunan Matematika Indonesia
(Indonesia Mathemathics Society – IndoMS) 1998-
sekarang