Embed Size (px)
Citation preview

Chapter 2
MHD Equilibrium and Stability
2.1 Introduction
In order to con�ne a plasma by a magnetic �eld, �rst of all the existence of equilibrium must be ensured.
Then, the stability of the equilibrium against possible magneto-hydrodynamic (MHD) instabilities is to be
investigated. Obviously, only when stability is ensured, such equilibrium con�guration may be physically
realized. However, MHD stable plasmas do not necessarily mean that they are free from �ner scale (so-called
micro) instabilities driven by kinetic resonances. MHD stability only guarantees the absence of large scale
(so-called macro) instabilities which are much more dangerous from con�nement point of view and could
lead to complete disruption of the prescribed equilibrium. In this Chapter, analyses of MHD equilibrium
and stability will be outlined for tokamak magnetic con�gurations.
2.2 MHD Equilibrium
The equation of motion for a charge-neutral plasma placed in a magnetic �eld is described by
�
�@
@t+ v �r
�v =
1
cJ�B�rp; (2.1)
where � is the mass density, v is the mass �ow velocity, and p is the plasma pressure which is assumed to
be isotropic. Eq. (??) can be deduced from the equation of motion for electrons and ions,
Mn0
�@
@t+ vi�r
�vi = n0eE+
1
cen0vi �B�rpi; (2.2)
mn0
�@
@t+ ve�r
�ve = �n0eE�
1
cen0ve �B�rpe; (2.3)
1

where pi(e) is the ion (electron) pressure which is assumed to be isotropic. Ions are assumed to be singly
charged. Adding the two equations, we obtain
�
�@
@t+ v �r
�v =
1
cJ�B0 �rp; (2.4)
where � = (M +m)n0 'Mn0 is the ion mass density, the electron mass m has been ignored compared with
the ion mass M , the average plasma �ow velocity v is approximated by the ion velocity
v =Mvi +mveM +m
' vi;
and the current is by de�nition
J = n0e (vi � ve) :
In equilibrium, no time variation is involved (@=@t = 0), and Eq. (2.1) becomes
�v �rv = 1
cJ�B�rp: (2.5)
Further simpli�cation is achieved if v, the plasma �ow velocity, is small. Sincepp=� is of the order of
the sound speed in a plasma, the convective term is negligible if the �ow velocity v is much smaller than
the sound speed. The dominant plasma �ow velocities found in Chapter 1 are the E � B drift and ion
diamagnetic drift velocities,
VE = cE�BB2
; V�i =c
eB2B�rpi; (2.6)
where pi = niTi is the ion pressure. (Note that, because of the small mass, the electron diamagnetic drift,
although comparable to the ion diamagnetic drift, does not contribute to the plasma �ow velocity.) The
condition V�i � cs (the sound speed) is equivalent to (when Ti ' Te)
�i (ion cyclotron radius)� Lp (pressure gradient scale length).
This trivial condition is well satis�ed in practical con�nement devices. (Otherwise, ions hit the vacuum
chamber wall during one cyclotron period, hence no con�nement.) However, the toroidal E � B drift
velocity in axisymmetric con�nement devices such as tokamaks and reversed �eld pinches,
V� = �cErB�
;
can be large particularly at the edge of con�ned plasma, and may approach the sound velocity (or the ion
thermal velocity). In this Note, we assume that the plasma �ow term �v �rv is ignorable and the equation
2

to be solved for plasma MHD equilibrium is simply
rp = 1
cJ�B: (2.7)
This serves as the �rst principle in studies on plasma equilibria with an isotropic plasma pressure. Although
it looks simple, solving Eq. (2.7) exactly is not an easy task, particularly for toroidal geometries. The
problems are several fold. First, it is intrinsically nonlinear, since the plasma current J and the magnetic
�eld B are related through Ampere�s law
r�B =4�cJ; (2.8)
in which J is the total current, conduction plus magnetization currents. Using Eq. (2.8), the force balance
equation, Eq. (2.7), can be rewritten as
r�p+
B2
8�
�=1
4�B �rB: (2.9)
Eq. (2.9) is explicitly a nonlinear di¤erential equation for B and is to be solved together with the constraint
r �B = 0: (2.10)
Second, because of the nonlinearity, solutions may not be unique. Usually, one (or the plasma itself!) has to
choose physically reasonable solutions among many possible equilibria. The question, �How does a tokamak
discharge determine its own pressure pro�le?� is an intriguing one, and at present it is still being debated.
Powerful plasma heating can be applied locally (e.g., at the cyclotron resonance layer) but plasmas appear
to respond so that the pressure pro�le remains essentially intact.
Let us examine the equilibrium equation in Eq. (2.9) in more detail. In the absence of a plasma
(p = 0;J = 0), Eq. (2.9) reduces to
BrB = B �rB when J = 0 (no plasma current). (2.11)
Physically, Eq. (2.11) means that a vacuum magnetic �eld must have equal gradient and curvature. When
a plasma is introduced, it modi�es the vacuum magnetic �eld through the plasma current. What Eq. (2.9)
implies is that the total pressure gradient of plasma and magnetic �eld in the LHS is to be balanced by the
tension associated with the curvature in the magnetic �eld. When the curvature of the magnetic �eld is
negligible as in the case of straight pinch devices, we have
r�p+
B2
8�
�= 0; (2.12)
3

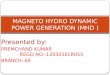
Figure 2-1: Current carrying straight cylindrical plasma. The total magnetic �eld Bz +B� is helical. Theaxial magnetic �eld Bz in the plasma may be higher (paramagnetic) or lower (diamagnetic) than that outsidethe plasma depending on the plasma pressure p:
that is, the plasma pressure gradient is to be counterbalanced by the magnetic pressure gradient.
As a simple example, let us consider a straight, cylindrical current carrying discharge in an axial magnetic
�eld, Bz. (Bz will be later changed to B�, the toroidal magnetic �eld when we get into discussion of
equilibrium in toroidal geometry.) The geometry is shown in Fig. 2.1. The plasma has a radius a, and carries
an axial current Jz(r) which may be nonuniform having radial dependence. We assume axial symmetry, that
is, @=@� = 0 for all physical quantities. The axial current Jz(r) creates an azimuthal magnetic �eld B�(r).
The total magnetic �eld, B = B�+Bz, therefore has a helical structure. In equilibrium, the radial component
of Eq. (2.9) yields@
@r
�p+
B2�8�
+B2z8�
�= � 1
4�
B2�r; (2.13)
where
(B �rB)r = �B2�r; (2.14)
is the only curvature term. Note that the axial magnetic �eld Bz is assumed to be straight, and thus has no
curvature. The azimuthal magnetic �eld B� is certainly curved. Eq. (2.14) can be found from
B�r
@
@�(B�e�) = �
B2�rer; (2.15)
4

where the vector identity@e�@�
= �er;
has been substituted. Rearranging Eq. (2.13), we obtain
@
@r
�p+
B2z8�
�= � 1
8�
1
r2@
@r(rB�)
2; (2.16)
which can alternatively be derived directly from the force balance equation,
@p
@r=1
c(J�Bz � JzB�); (2.17)
with
J� = �4�
c
@Bz@r
; Jz =4�
c
1
r
@
@r(rB�): (2.18)
Multiplying Eq. (2.16) by r2, and integrating the result from r = 0 (axis) to r = a (plasma edge), we obtain
�p+1
8�
�B2z �B2z(a)
�=B2� (a)
8�; (2.19)
where
�p =2�
�a2
Z a
0
p(r)rdr; (2.20)
B2z =2�
�a2
Z a
0
B2z(r)rdr; (2.21)
are the averages across the plasma cross section. Eq. (2.19) is the desired equilibrium condition for a straight
current carrying plasma, and describes the force balance condition in the radial (minor radius) direction. It
remains valid even when the discharge is weakly bent to form a closed ring (as in tokamaks), and we will
later use this condition in analyzing tokamak equilibrium.
The force balance equation
rp=1cJ�B;
can be solved for the current J as
J? = cB�rpB2
;
where J? is the plasma current perpendicular to the magnetic �eld. The plasma current along the magnetic
�eld is undetermined except for the obvious constraint due to charge neutrality,
r � J = r � (Jk + J?) = 0:
In practical con�nement sytems such as tokamak, a large plasma current �ows along the magnetic �eld. The
5

toroidal current is largely force-free and �ows along the magnetic �eld. The simplest means is to induce an
axial electric �eld Ez, which drives the current through the Ohm�s law,
Jz = �Ez; (2.22)
where � is the plasma conductivity. In a fully ionized plasma, the conductivity is insensitive to the plasma
density, but rapidly increases with the temperature,
� =ne2
m�ei' 1:2� 103[Te(eV)]3=2 (Siemens/m), (2.23)
where �ei is the electron-ion collision frequency. (In tokamaks, the presence of trapped electrons tends to
reduce the conductivity, and the conductivity should be multiplied by a factor which depends on the fraction
of the trapped electrons.) Therefore, the axial current pro�le is essentially determined by the electron
temperature pro�le, which is in turn governed by the heat loss through the electron thermal conduction
across the con�ning magnetic �eld. In experiments, only the total plasma current,
Ip = 2�
Z a
0
Jzrdr; (2.24)
is controllable, and the pro�le of Jz(r) (and thus Te(r)) is largely up to the plasma itself. At present, how a
tokamak discharge chooses the current and temperature pro�les remains an open question.
2.3 Tokamak Equilibrium
The tokamak con�guration can be formed by bending the straight discharge discussed in the preceding
section into a torus, as shown in Fig. 2.2. The system is symmetric about the vertical axis, and the axial
magnetic �eld Bz in the case of straight discharge is now replaced by the toroidal magnetic �eld B�. In
tokamaks, the toroidal magnetic �eld is much larger than the poloidal �eld, B� � B�. More important, the
toroidal magnetic �eld is curved with a curvature radius R; the characteristic major radius of the tokamak
con�guration. If the cylindrical coordinate system (r; �; z) is employed, the � component of Ampere�s law
r2A = �4�cJ; (2.25)
yields �r2 � 1
r2
�A� = �
4�
cJ�; (2.26)
6

Figure 2-2: Schematic of a tokamak with circular cross-section, major radius R and minor radius a: Thevertical magnetic �ux is to drive the toroidal current J� through magnetic induction. The �coil�is to producethe toroidal magnetic �eld B�:
where the Laplacian r2 in the cylindrical coordinates (r; �; z) is
r2 = @2
@r2+1
r
@
@r+
@2
@z2: (2.27)
(Note that @=@� = 0 from the assumed axisymmetry.) The axisymmetric nature allows us to introduce a
poloidal magnetic �ux function ,
(r; z) =
IA�dl = 2�rA�: (2.28)
The �ux function is of course a scalar quantity and more convenient to work with. A surface described by
= constant is called a magnetic surface. By de�nition, the magnetic �eld must be tangent to the magnetic
surface, Bn = 0 on a magnetic surface, where �n�stands for the normal component. Since B � rp = 0, it
follows that a magnetic surface is an isobaric surface as well. Furthermore, the total current, both poloidal
and toroidal, contained within a magnetic surface is constant. Using , Eq. (2.26) can be rewritten as
�@2
@r2� 1r
@
@r+
@2
@z2
� = �8�
2
crJ�: (2.29)
7

From B =r�A; we obtain the poloidal magnetic �eld components, Br and Bz, in terms of ,
Br = �1
2�r
@
@z; (2.30)
Bz =1
2�r
@
@r(2.31)
or
Bp =1
2�rr � e�; (2.32)
with e� being the unit vector in � direction. Then, the equilibrium equation rp = 1
cJ�B can be rewritten
as
rp = 1
c
1
2�rJ�r +
1
4�(r�B�)�B�; (2.33)
where the fact J �r = 0 has been used. The radial (r) component of Eq. (2.33) yields
@p
@r=1
c
1
2�rJ�@
@r� 1
4�
B�r
@
@r(rB�): (2.34)
Since the magnetic �ux surface is also an isobaric surface, the pressure p must be a total function of ,
p = p( ): Therefore, we may write@p
@r=@
@r
dp( )
d : (2.35)
Similarly, the equipoloidal current surface, I( ) =const., which is related to rB� through the Ampere�s law,
2�rB� =4�
cI( ); (2.36)
also coincides with the magnetic surface@I
@r=@
@r
dI( )
d : (2.37)
Therefore, the toroidal current J� is given by
J� = 2�cr
�dp
d +
1
2�c2r2dI2
d
�: (2.38)
Substituting this into Eq. (2.117), we obtain
�@2
@r2� 1r
@
@r+
@2
@z2
� = �8�
2
c
�2�cr2
dp
d +1
c
dI2
d
�: (2.39)
This di¤erential equation for the �ux function was �rst derived, independently, by Grad, Shafranov, and
Schlüter, and serves as a governing equation for MHD equilibrium in axisymmetric toroidal devices, such as
tokamaks and Reversed Field Pinch (RFP). Note that both p( ) and I2( ) can be arbitrary functions of ,
8

and except for special cases, Eq. (2.39) is in general nonlinear. The �ux function sensitively depends on the
plasma pressure and current distributions. To �nd a �ux function for a desired equilibrium con�guration
usually requires numerical analyses. However, if the toroidal current J� is a linear function of , approximate
analytic solutions may be found for the �ux function . In the following, one such solution will be given.
In order to show how one can proceed to solve the Grad-Shafranov equation, we consider a somewhat
unphysical tokamak discharge. We assume that the toroidal current J� is independent of the �ux function
, that is, both the pressure p and I2 are linear functions of ,
p( ) = p0
�1 + k1
0
�; (2.40)
I2( ) = I20
�1 + k2
0
�; (2.41)
where p0; I20 ; 0; k1 and k2 are all constants. (A discharge with a uniform toroidal current is of course
unrealistic because the current density pro�le is tied up with the electron temperature pro�le which is highly
nonuniform. In fact, the magnetic shear can be created only by a nonuniform current pro�le. The assumption
of a uniform current is for analytical ease.) The plasma pressure p and the toroidal current J� are assumed
to vanish at the edge of the plasma. We further assume that the plasma has a circular cross section of a
minor radius a. The major radius R is assumed to be much larger than a; R=a� 1. Therefore, the inverse
aspect ratio, " = r=R; may be employed as a small expansion parameter.
It is convenient to introduce the quasi-toroidal coordinates de�ned by
r = R+ � cos �;
z = � sin �:
Then, in the new coordinates (�; �), Eq. (2.39) is rewritten as
L ��@2
@�2+1
�
@
@�+1
�2@2
@�2� 1
R+ � cos �
�cos �
@
@�� sin �
�
@
@�
��
= �8�2
c
�2�c(R+ � cos �)2
dp
d +1
c
dI2
d
�: (2.42)
Choosing p0; I20 ; k1; k2 and 0 such that
8�2
c
�2�cR2
k1p0 0
+1
c
k2I20
0
�= 0a2
(2.43)
we obtain the following equations for both interior and exterior regions,
L = �K�(R+ � cos �)2
R2� 1�� 0a2; for � < a; (2.44)
9

L = 0; for � > a: (2.45)
where
K = 16k1�3R2p0= 0; (2.46)
is a constant.
We solve Eqs. (2.41) and (2.42) perturbatively by choosing the inverse aspect ratio � = �=R as an
expansion parameter. In the lowest order, we have
@2
@�2+1
�
@
@�= � 0
a2; � < a; (2.47)
@2
@�2+1
�
@
@�= 0; � > a: (2.48)
The boundary condition is that be continuous at the plasma edge, � = a. Also, by assumption, both the
pressure p( ) and the toroidal current J� vanish at � = a. Therefore, the lowest order solutions are
(0)i (�) = � 0
4a2�2; � < a; (2.49)
(0)e (�) =
��14� 12ln��a
�� 0; � > a: (2.50)
where the subscripts i and e are for internal and external solutions. From p(� = a) = 0, we �nd
k1 = 4:
In the �rst order in � = �=R, we need to solve
�@2
@�2+1
�
@
@�+1
�2@2
@�2
� (1)i =
1
Rcos �
@ (0)i
@�� 2K �
Rcos �; (2.51)
for the internal region � < a. Assuming that (1)i is separable as
(1)i (�; �) = 1(�) cos �; (2.52)
and noting the fact that the plasma surface (� = a) is also a magnetic surface and thus (1)i (� = a; �) is
independent of � which requires
1(a) = 0; (2.53)
we obtain
(1)i (�; �) =
a
8R
� 02+ 2a2K
���
a� �3
a3
�cos �: (2.54)
10

For the exterior region, the �rst order equation is
�@2
@�2+1
�
@
@�+1
�2@2
@�2
� (1)e =
1
Rcos �
@ (0)e@�
: (2.55)
Again assuming
(1)e (�; �) = 2(�) cos �; (2.56)
and imposing the boundary condition
1(a) = 2(a) = 0 ;d 1d�
����a
=d 2d�
����a
; (2.57)
we obtain the interior solution to order � = �=R;
i(�; �) = ��2
4a2 0 +
a
8R
� 02+ 2a2K
���
a� �3
a3
�cos �; for � < a; (2.58)
and the exterior solution
e(�; �) = ��1
4+1
2ln��a
�� 0 +
�
8R
�� 02� 2a2K
��1� a2
�2
�+ 2 0 ln
�a
�
��cos �;
for � > a:
(2.59)
The perturbation procedure can be continued, if desired, to higher orders in �, and thus higher harmonics
of �.
The poloidal magnetic �elds in the exterior region (� > a) are given by
Be� = �1
2�(R+ � cos �)
1
�
@ e@�
; (2.60)
Be� =1
2�(R+ � cos �)
@ e@�
: (2.61)
To order �=R, the � component of the external magnetic �eld becomes
Be�(�; �) = B�(a)
�a
���a
8R
�1� 4a
2K
0
��1 +
a2
�2
�+
a
2R
�ln
�a
�
�+ 1
��cos �
�; (2.62)
where
B�(a) = � 04�Ra
; (2.63)
is the lowest order poloidal magnetic �eld at the plasma surface due to the total toroidal plasma current.
11

Eq. (2.62) can be rearranged as
Be�(�; �) = B�(a)
"a
�� a
2R
(ln
�8R
�
����p � 1
4
��a�
�2)cos �
#
+B�(a)a
2R
�ln
�8R
a
�+ �p(a)� 5
4
�cos �: (2.64)
The last term, which is independent of �; is the � component of the constant (uniform) vertical magnetic
�eld
B�(a)a
2R
�ln
�8R
a
�+ �p �
5
4
�� B?; (2.65)
that must be applied externally to maintain equilibrium in the major radius direction, and
�p(a) �a2K
0=
8��p
B2� (a); (2.66)
is the poloidal beta factor at the plasma minor radius. At arbitrary radius �; the poloidal � is de�ned by
�p(�) =8�
B2� (�)(p� p(�)) ; p =
2�
Z �
0
p(�)�d�
��2: (2.67)
For the parabolic pressure pro�le p(�) = p0[1� (�=a)2] being considered, the quantity p� p(�) is quadratic
in �;
p� p(�) = 1
2p0
��a
�2;
where p0 is the pressure at � = 0: Since B�(�) / � for the assumed uniform plasma current; the local poloidal
� is in fact constant, and equal to �p(a) for the special case of a uniform plasma current. Likewise, it should
be noted that Eq. (2.64) is the special case of a uniform plasma current for which the internal inductance
parameter is li = 1=2, where the dimensionless parameter li is de�ned by
li =
2�
Z a
0
B2� (�)�d�
�a2B2� (a); (2.68)
and is a measure of the toroidal current distribution over the cross-section of the discharge. For current
distribution peaked at the center (� = 0), li > 1=2; and for a skin current pro�le, li < 1=2: For nonuniform
current distribution, the vertical magnetic �eld should be generalized to
B? =a
2RB�(a)
�ln
�8R
a
�+ �p +
li2� 32
�: (2.69)
In most present-day tokamaks having long discharge durations, feedback plasma position control is usually
12

employed. The quantity
�p +li2
(2.70)
can be reduced from the current in the feedback circuit current. However, it is a di¢ cult task to determine
either �p or li separately since both quantities require knowledge of pressure and poloidal magnetic �eld
pro�le in a discharge. One method to measure �p directly is to detect the change in the toroidal magnetic
�ux, which is proportional to 1� �p as follows from Eq. (2.19),
� toroidal = �a2�q
B2� �B�(a)�' �a2
2
B2� (a)
B�(a)(1� �p):
The unity in 1 � �p is the paramagnetic contribution from the plasma current itself (the so-called self-
transformer action), and ��p is due to diamagnetism. Diamagnetic measurement requires careful compen-
sation of undesired magnetic signals because the change in the toroidal magnetic �ux is in general extremely
small.
The interior magnetic �eld can be calculated in a similar manner. The azimuthal (�) component is given
by
B�(�; �) =1
2�R
@ i@�
=1
2�R
�� �
2a2 0 +
a
8R
� 02+ 2a2K
��1
a� 3�
2
a3
�cos �
�: (2.71)
The angular dependence, which is absent in a straight discharge, is evidently due to toroidal e¤ects char-
acterized by the proportionality to 1=R; the curvature of the torus. As will be discussed in detail in the
following section, toroidicity causes another important deviation from a straight discharge. The center of a
circular magnetic surface described by � = �0 is shifted inward as �0 increases, that is, the magnetic axis,
on which = 0 is chosen, tends to be shifted outward in the major radius direction. This shift, known as
the Shafanov shift, is given by
� =1
2
��p(�) +
li(�)
2
�a2 � �2R
; (2.72)
where the internal inductance parameter at the radius � is de�ned by
li(�) =
2�
Z �
0
B2� (�)�d�
��2B2� (�): (2.73)
Note that even when the plasma pressure is low (small �p), the shift is positive. For a uniform current
density, li(�) = 1=2 = constant. If we replace � in Eq. (2.71) by
�+�cos �;
13

where � is now measured from the magnetic axis, we �nd
B�(�; �) = B�(�)
�1 +
�
R
��p(�) +
li(�)
2� 1�cos �
�; (2.74)
It is noted that
B�(�) = � 0
4�Ra2�;
is the lowest order poloidal �eld corresponding to a straight discharge.
From this result, the maximum poloidal � allowed for a tokamak discharge may be estimated. At the
inner side where � = �; the poloidal magnetic �eld vanishes when
�pmax 'R
a: (2.75)
At such a high �p; the shift of the magnetic axis becomes comparable with the minor radius a; and the
maximum poloidal � estimated above may be regarded as the equilibrium limit in tokamaks. It is of the
same order of magnitude as the threshold � limit imposed by the ballooning and internal kink instabilities
as we will see in Section 2.5.
The vertical magnetic �eld given in Eq. (2.69) can alternatively be derived from a more basic consideration
of the force balance condition in the major radius direction. Any current carrying agent tend to increase its
inductance. Also, a gas con�ned in a given volume tends to expand (the ballooning force). The magnetic
energy associated with a tokamak discharge consists of two parts, one due to the toroidal current Ip,
Um1 =1
2c2L�I
2p ; (2.76)
where L� is the self-inductance of a toroidal thin (R� a) ring current
L� = 4�R
�ln
�8R
a
�� 2 + li
2
�;
�in MKS, L� = �0R
�ln
�8R
a
�� 2 + li
2
�(H)�; (2.77)
and the other due to the change in the toroidal magnetic �eld due to either paramagnetism or diamagnetism,
Um2 =1
8�
�B2� �B
2�(a)
�V =
�B2� (a)
8�� p�V; (2.78)
where V = 2�2Ra2 is the total volume of the discharge. The radial force due to Um1 can be readily calculated
from the familiar formula
FR1 =@
@R
�1
2c2L�I
2p
�=4�
2c2
�ln
�8R
a
�� 1 + li
2
�I2p ; (2.79)
which is positive and thus indicates an expanding force. For the force due to the change in the toroidal
14

magnetic �eld, let us recall that a toroidal magnet having major/minor radii R=a and N series windings has
an inductance
L = 4�N2(R�pR2 � a2);
�in MKS L = �0N
2�R�
pR2 � a2
�(H)�: (2.80)
The force in the major radius direction can be evaluated from
FR =@
@R
�1
2c2LI2�
�=
1
2c2LI2�
�1� Rp
R2 � a2
�< 0: (2.81)
Therefore, an increase in the toroidal magnetic energy causes a radially inward force. Returning to the
tokamak discharge, we therefore see that the radial force associated with the change in the toroidal magnetic
energy is
FR2 = �@
@R
B2� �B2�(a)
8�V
!= �
B2� �B2�(a)8�
2�2a2: (2.82)
Finally, the radial force due to the plasma pressure is simply
FRp =@
@R(�pV ) = 2�2a2�p: (2.83)
Adding FR1; FR2; FRp, we thus �nd the total radial force to act on a tokamak discharge
FR =4�
2c2
�ln
�8R
a
�� 1 + li
2
�I2� +
"�p�
B2� �B2�(a)8�
#2�2a2: (2.84)
However, from Eq. (2.19), (the equilibrium in the minor radius direction), we have
B2� �B2�(a)8�
=B2� (a)
8�� �p:
Then, FR becomes
FR =4�
2c2I2�
�ln
�8R
a
�� 32+li2+
8��p
B2� (a)
�: (2.85)
This force must be counterbalanced by a vertical magnetic �eld B? which produces the radially inward
Lorentz force,
2�RI�cB?: (2.86)
We thus �nd the required vertical magnetic �eld
B? =a
2RB�(a)
�ln
�8R
a
�+ �p +
li2� 32
�; (2.87)
where I� = caB�(a)=2 has been substituted. This is consistent with Eq. (2.69) worked out in terms of the
15

equilibrium �ux function .
2.4 Shift of Magnetic Axis and Metric Coe¢ cients
For low �, large aspect ratio (R=a � 1 with R the major radius and a the minor radius) tokamaks, the
magnetic �eld components can be directly found for a given plasma pressure distribution. The important
parameter in �nite � tokamaks is the progressive shift of the center of magnetic surfaces. If the minor
cross section is circular, then magnetic surfaces are approximately circular as well, although they are not
concentric. In Fig. 2.3(a), � is the radius of a given magnetic surface, and 4 is the shift of the center from
the magnetic axis, which is located at the major radius r = R. The relationship between the cylindrical
coordinates (r; �; z) and the new quasi-toroidal coordinates (�; �0; �) is8>>><>>>:r = R�4(�) + � cos �0;
z = � sin �0;
� = �;
(2.88)
where �(�) depends on �. The azimuthal angle �0 is rather inconvenient because of the fact that the center
of the magnetic surface shifts as � varies. For this reason, we introduce another poloidal angle-like quantity
� which becomes the conventional azimuthal angle in the limit of � ! 0. � = const. line is therefore not a
straight line, but curved, as illustrated in Fig. 2.3(b). We thus let
�0 = � � �(�; �) (2.89)
where �(�; �) will be determined later. Also note � and � coordinates are in general not orthogonal to each
other.
The metric coe¢ cients to relate (r; �; z) coordinates to (�; �; �) coordinates can be calculated as follows:8>>>>>>>>>>><>>>>>>>>>>>:
g11 =
�@r
@�
�2+
�@z
@�
�2' 1� 240 cos �;
g12 =@r
@�
@r
@�+@z
@�
@z
@�' �
�40 sin � � �@�
@�
�;
g22 =
�@r
@�
�2+
�@z
@�
�2' �2
�1� @�
@�
�2;
g33 =
�@(r�)
@�
�2' R2
�1 + 2
�
Rcos �
�:
(2.90)
The other components are zero. Here, �0 = d�=d�, and we retain terms up to �rst order in the inverse
aspect ratio, � = �=R. Also, we have assumed that �; �=� are of order �. However, �0 could be of order
16

Figure 2-3: Quasi toroidal coordinates (�; �0; �) where � is the radius of a magnetic surface whose center isdisplaced inward from the magnetic axis by �: R (= const.) is the major radius of the magnetic axis.
unity. These metric coe¢ cients yield the determinant,
g = Det gij
= �2R2�1 +
2�
R
��1� 2�0 cos � + 2�0 sin ��@�
@�
� 2@�@�� �2
�@�
@�
�2� (�0)2 sin2 �
#: (2.91)
Therefore,pg ' �R
�1 +
�
Rcos �
��1��0 cos � � @�
@�
�: (2.92)
Let us now assume a low � tokamak. The toroidal magnetic �eld may be approximated by the vacuum �eld,
B�(�; �) 'B0
1 +�
Rcos �
: (2.93)
The poloidal magnetic �eld B�(�; �) is assumed to have a similar angular dependence,
B�(�; �) = B�(�)�1 + �
�
Rcos �
�; (2.94)
17

where � takes into account the shift of the magnetic axis, �: � and � are related through the following
relation,
� =1
R
Z �
0
�(1 + �)d�: (2.95)
This important relation follows from r �B = 0; which reduces to
1pg
@
@�
�rg
g22B�
�= 0; (2.96)
since @=@� = 0 (axisymmetry) and B� = 0 on a magnetic surface. Substituting the metric coe¢ cient g22
from Eq. (2.90) andpg from Eq. (2.92), we see Eq. (2.96) becomes
@
@�
h�1 +
�
Rcos �
�(1��0 cos �)
�1 + �
�
Rcos �
�i= 0; (2.97)
which indeed yields
�0 =d�
d�=�
R(1 + �): (2.98)
The components of the magnetic �eld in turn determine the toroidal current density J� from Ampere�s
law,4�
cJ� = (r�B)�;
or4�
cJ3 =
1pg
�@B2@�
� @B1@�
�; (2.99)
where J3 is the contravariant component of the current in � direction, B1 and B2 are covariant components of
the magnetic �eld in � and � directions respectively. (The symbols B�; B� are for the physical components.)
The covariant magnetic �eld Bi is related to the contravariant �eld Bj through
Bi =Xj
gijBj : (2.100)
Substituting 8>>>>><>>>>>:B1 = 0;
B2 =B�pg22
=B�(�)
�
�1 +
@�
@�
��1 +
�
R�cos �
�;
B3 =B�pg33
=B0R
�1� 2 �
Rcos �
�;
(2.101)
we �nd 8>>>>><>>>>>:B1 = B�(�)
��0 sin � � �@�
@�
��1 + �
R�cos � +@�
@�
�;
B2 = �B�(�)
�1� 2@�
@�
��1� 2 �
R�cos �
�;
B3 = RB0:
(2.102)
18

From the contravariant components, a convenient choice for the angle �(�; �) may be made. Since the
magnetic �eld lines are described byB2
d�=B3
d�; (2.103)
the ratio B2=B3 becomes independent of the azimuthal angle � if �(�; �) satis�es
@�
@�+�
R(� + 2) cos � = 0: (2.104)
Physically, this choice of angular variable � (= �0 + �) makes the safety factor q = B3=B2 independent of
the angular location. Integrating Eq. (2.104) yields
�(�; �) = � �
R(� + 2) sin �: (2.105)
With this choice for �; the contravariant and covariant magnetic �elds become8>>>>><>>>>>:B1 = 0;
B2 =B�pg22
=B�(�)
�
�1� 2 �
R�cos �
�;
B3 =B�pg33
=B0R
�1� 2 �
Rcos �
�;
(2.106)
8>>>><>>>>:B1 = B�(�)
��0 sin � � �@�
@�
��1 +
�
R�cos � +
@�
@�
�;
B2 = �B�(�) (1 + 2�0 cos �) ;
B3 = RB0:
(2.107)
Substituting B1 and B2 into Eq. (2.99), we thus obtain the contravariant component of the toroidal current,
J3 =c
4�
1� �
Rcos �
�R
�@
@�f�B�(�) (1 + 2�0 cos �)g �B�(�)
���00 +�0 +
�
R
�cos �
�
' c
4�
1� �
Rcos �
�R
�@
@�f�B�(�)g+B�(�)�0 cos �
�; (2.108)
where ��00 and �=R are ignored compared with �0: The usual (physical) toroidal current J� can be found
from
J� =pg33J
3 ' c
4�
�@
@�f�B�(�)g+B�(�)�0 cos �
�: (2.109)
The �rst term in the RHS is the toroidal current which produces the poloidal magnetic �eld B�(�): The
second term is called the rotational transform current. Since
�0 ' �q2Rd�d�; (2.110)
19

we �nd that the rotational transform current is approximately given by
J� (rotational transform) ' �2c�
RB�
dp
d�cos �: (2.111)
The rotational transform current must �ow in any toroidal plasmas to mitigate charge separation caused
by toroidicity. The divergence of the diamagnetic current is non-vanishing in toroidal geometry,
r � J? = �2c1
B3rB � (B�rp) = � 2c
RB�
dp
d�sin �: (2.112)
The charge neutrality condition r � J = 0 thus requires that a parallel current must �ow to compensate
r � J?;
r � Jk = �r � J?;
in order to maintain charge neutrality. Noting
r � Jk '1
qR
@J�@�
;
we recover the rotational transform current in Eq. (2.111).
2.5 Ideal MHD Stability
In ideal MHD, a plasma is regarded as an ideally conducting �uid maintaining a high degree of charge
neutrality. In MHD approximation, discrete nature of the charged particles is largely ignored, and both
electrons and ions are assumed to move together as a single �uid. Therefore, MHD approximation is valid
for phenomena su¢ ciently slow with a characteristic frequency (or the growth rate) j@=@tj � i; the ion cy-
clotron frequency, and spatial variation (wavelength perpendicular to the magnetic �eld) su¢ ciently smooth,
k?rci � 1; where rci is the ion Larmor radius.
The set of basic equations in ideal MHD is:
�mdv
dt=1
cJ�B�rp; equation of motion (2.113)
r � J = r � J? +r � Jk = 0; charge neutrality (2.114)
E+1
cv �B = �J ' 0; Ohm�s law (2.115)
where �m is the mass density, � = 1=� ' 0 is the resistivity, and J?(k) is the plasma current perpendicular
20

(parallel) to the magnetic �eld. The electromagnetic �elds are of course governed by the Maxwell�s equations,
r�E = �1c
@B
@t; Faraday�s law (2.116)
r�B ' 4�
cJ; Ampere�s law (2.117)
r �B = 0; (2.118)
where in Eq. (2.117), the displacement current is ignored. As usual, it is convenient to introduce the scalar
and vector potentials, � and A, so that
E = �r�� 1c
@A
@t; B = r�A (2.119)
In particular, when the plasma � is small, it is su¢ cient to consider the parallel component of the vector
potential, Ak only,
E? 'r?�; Ek '�rk��1
c
@Ak
@t; B?'r�Ak; for � � 1: (2.120)
This approximation corresponds to ignoring the compressional Alfven mode (magnetosonic mode) and con-
sidering the shear Alfven mode only. In fact, most MHD instabilities can be regarded as destabilized shear
Alfven modes as we will see shortly.
The dispersion relation for the shear Alfven mode may be derived as follows. Substituting B?'r�Ak
into Ampere�s law, we obtain
r2Ak = �4�
cJk; (2.121)
provided the Coulomb gauge r �A = 0 is chosen. The charge neutrality condition in Eq. (2.114) allows us
to rewrite this as
rk � r2Ak =4�
cr � J?; (2.122)
where the cross-�eld current J? consists of the ion polarization current and the diamagnetic current,
J? =n0e
2
M2i
@E?@t
+ cB�rp0B2
: (2.123)
Here, p0 is the pressure perturbation which in the lowest order may be found from
@p0
@t+ vE � rp0 = 0; (2.124)
where
vE = cE? �BB2
= cB�r?�
B2;
21

is the E � B drift, and p0 is the unperturbed plasma pressure. In ideal MHD, the parallel electric �eld
should be vanishingly small,
Ek = �rk��1
c
@Ak
@t' 0: (2.125)
Then the vector potential can be eliminated in favor of the scalar potential, and Eq. (2.122) is reduced to
rk � r2rk� =@2
@t24��mB2
r2?��8�
B5[rB � (B�r)][(B�r�) � rp0]: (2.126)
In a uniform plasma, the last term may be ignored. In this case, noting @=@t = �i!;r = ik; we �nd
!2 ' B2
4��k2k = V 2Ak
2k; (2.127)
where the Alfven velocity VA is de�ned by
VA =Bp4��m
: (2.128)
The last term in Eq. (2.126) is the ballooning term. When the pressure gradient rp0 and the magnetic
gradient rB are in the same direction, this term tends to reduce the positive Alfven term (kkVA)2; and if
the pressure gradient is large enough, a ballooning instability could occur. For a qualitative estimate of the
critical pressure gradient, we may approximate kk by
kk '1
2
2�
L=
1
2qR; (2.129)
where L = 2�qR is the connection length and the factor 1/2 takes into account the standing wave nature
along the magnetic �eld. Then the critical pressure gradient may be estimated as
�q2Rd�d�' 1
4:
This crude estimate is independent of the magnetic shear which is expected to have a stabilizing in�uence on
the ballooning mode. In order to reveal the shear dependence of the critical pressure gradient, the ballooning
mode equation must be solved more rigorously.
In order to analyze the ballooning mode equation in Eq. (2.126), explicit forms of the di¤erential operators
r? and rk are required. For spatial dependence of the potential �(r); we assume
�(�; �; �) = f(�; �)ei(m��n�); (2.130)
where m and n are the poloidal and toroidal mode numbers and the amplitude f(�; �) is a slowly varying
function of � and �: The ballooning mode is characterized by �ute-like perturbation, highly extended along
22

the magnetic �eld (slow variation along the magnetic �eld) but with rapid variation across the �eld. This
means that the e¤ective rk, the gradient along the magnetic �eld, is small, and so is the in�uence of the
stabilizing Alfvenic magnetic perturbation. However, rk cannot vanish completely in a sheared magnetic
�eld. To illustrate this point, let us calculate the gradient along the helical magnetic �eld. Operating
b�rk =1
B�
�B�R
@
@�+B��
@
@�
�
on f(�; �) ei(m��n�), we �nd
b�rkf(�; �) ei(m��n�) =�im� nqqR
f +1
qR
@f
@�
�ei(m��n�)
where q(�) = �B�=RB�(�) is the safety factor. On a magnetic rational surface on which q = m=n; the
parallel gradient becomes small, but does not vanish entirely, if the amplitude function f has dependence on
�:
Near a magnetic rational surface located at � = �0; the phase function m� � n� = nq(�)� � n� may be
expanded as
n(�� �0)dq
d��
Therefore, the cross �eld gradient r?�f(�; �) ei(m��n�)
�becomes
r?f(�; l) ei(m��n�) '�inq
�fe� +
�indq
d��f + inq
@�
@�f +
@f
@�
�e�
�ei(m��n�);
where@�
@�= �1
��0 sin �;
is the correction to the radial derivative due to the shift of the magnetic axis. For large n; the radial derivative
of the amplitude @f=@� may be ignored. In this case, the cross-�eld gradient becomes
r?f(�; l) ei(m��n�) ' ik� [e� + (s� ��0 sin �) e�] f; (2.131)
where k� = m=� and
s =�
q
dq
d�;
is the magnetic shear parameter. The cross-�eld Laplacian is
r2? = �k2��1 + (s� ��0 sin �)2
�:
23

The magnetic gradient rB may be approximated by
rB ' rB� = �B0R(cos �e� � sin �e�) ;
and the pressure gradient by
rp = dp
d�e�:
Then, the ballooning mode equation reduces to the following di¤erential equation,
d
d�
��1 + (s� � � sin)2
� dfd�
�+ �[cos � + sin �(s� � � sin �)]f
+!2(qR)2
V 2A
�1 + (s� � � sin �)2
�f = 0; (2.132)
where
� � �q2Rd�d�; (2.133)
is the ballooning parameter which is proportional to the plasma pressure gradient dp=d�: At marginal stability
! = 0, we haved
d�
��1 + (s� � � sin)2
� dfd�
�+ �[cos � + sin �(s� � � sin �)]f = 0: (2.134)
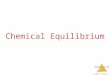
This equation has extensively been analyzed in the past for determining the stability boundary in the (s; �)
plane which is shown in Fig. 2.4. For a given shear parameter s, the ballooning mode sets in at the critical
pressure gradient �1: �1 at small shear is about 0.3 which roughly agrees with the qualitative estimate
� = 0:25 made earlier. As expected, shear has stabilizing in�uence. Further increase in � stabilizes the
ballooning mode again at �2: The region � > �2 is referred to as the second stability region. The origin of
the second stability region may be found in the Shafranov shift, �0 = �; in the curvature term
cos � + sin �(s� � � sin �):
At large �; the e¤ective curvature tends to decrease. To illustrate this e¤ect, let us assume a simple trial
eigenfunction
f(�) = 1 + cos �; j�j < �
which has a maximum at the worst curvature region � = 0 and small amplitude in the good curvature region
� = �: The norm of the curvature function can be calculated as
hcos � + sin �(s� � � sin �)i� =
Z �
0
[cos � + sin �(s� � � sin �)] f2d�Z �
0
f2d�
=2
3+5
9s� 5
12�:
24

Figure 2-4: Stability diagram of the ideal MHD ballooning mode in the (s; �) plane. The region inside thetriangular boundary is unstable. Note that for a �xed s (magnetic shear), the ballooning mode is unstablein the region �1 < � < �2. The region � > �2 is called the second stability regime.
25

An e¤ective decrease in the magnetic curvature at su¢ ciently large pressure gradient (proportional to �)
can be seen. A high pressure tokamak discharge may thus be stable against the ballooning mode through
self-stabilization at least in the ideal MHD approximation. However, this conclusion should be examined
in terms of more accurate analyses which are not subject to ideal MHD assumptions. We will revisit this
problem in later chapters where two-�uid and kinetic theories will be developed.
2.6 Energy Principle for Ideal MHD Modes
We now return to the formulation of the energy principle. The equation of motion in Eq. (2.113) may be
linearized as
�m@v1@t
=1
c(J0 �B1 + J1 �B0)�rp1; (2.135)
where subscripts 0 and 1 indicate unperturbed and perturbed quantities, respectively. The plasma displace-
ment from the equilibrium position is denoted by �, which is related to the velocity through
�@
@t+ v �r
�� ' @�
@t= v1: (2.136)
The kinetic energy density associated with the displacement � is
1
2�m
�@�
@t
�2: (2.137)
If an exponentially growing perturbation �(r; t) = �0(r)e t is assumed, the kinetic energy becomes
1
2�m
2�2: (2.138)
However, the LHS of the equation of motion can be written in terms of � as
� 2�: (2.139)
Therefore, the potential energy W may be de�ned by
W = �12
ZV
� ��1
c(J0 �B1 + J1 �B0)�rp1
�(2.140)
in which the volume integral covers the entire volume of a plasma to be analyzed. The growth rate is given
by
2 = � 2W
�mR�2dV
:
Therefore, if W > 0 (< 0) the equilibrium is stable (unstable).
26

All perturbed quantities, J1; B1 and p1 can be expressed in terms of � as follows. The perturbed pressure
p1 can be found from the equation of state,
p�� g = const. (2.141)
or after linearization,
p1 = gp0
�m0�m1; (2.142)
where g is the adiabaticity constant (the ratio of speci�c heats). The density perturbation �1 is in turn
found from the continuity equation,d�m1dt
+ �m0r � v = 0; (2.143)
which, on integration over time, yields
�1(r0 + �) = ��0r � �: (2.144)
Substituting �1 into Eq. ( 2.142), we thus obtain
p1(r0 + �) = � gp0r � �: (2.145)
Note that these perturbed quantities are those at the displaced location r0+ �, that is, they are Lagrangian
perturbations of the plasma �uid at r0 + �, where r0 is the equilibrium position. For example, the Eulerian
density perturbation �m1(r0) can be found by expanding the Lagrangian density perturbation as
�m1(r0) ' ��(r0) � r�m0 � �m0r � �: (2.146)
The perturbed magnetic �eld B1 is related to the displacement � through
B1(r0 + �) = � �rB0 +r� (� �B0); (2.147)
which follows from the almost vanishing total electric �eld,
E+1
cv �B ' 0; (2.148)
and Faraday�s law@B
@t=
�d
dt� v �r
�B = �cr�E: (2.149)
27

The corresponding Eulerian magnetic perturbation is
B(r0) = r� (� �B0): (2.150)
The perturbed current J1 can be similarly found from Ampere�s law
J =c
4�r�B: (2.151)
The Lagrangian current perturbation is
J1(r0 + �) =c
4�r�r�(� �B0) + � � rJ0; (2.152)
and the Eulerian current perturbation is
J1(r0) =c
4�r�r�(� �B0): (2.153)
Substituting the Eulerian perturbations p1; B1; and J1 into Eq. (2.140), we obtain an expression for the
potential energy in terms of the displacement �,
W (�) = �12
Z �1
c� � (J0 �B1) +
1
c� � (J1 �B0) + � � r
� gp0r � � + � � rp0
��dV; (2.154)
where B1 and J1 are the Eulerian perturbations,
B1 =r� (� �B0);
J1 =c
4�r�B1:
Use of the Eulerian (rather than Lagrangian) perturbations is appropriate because the volume element dV
for the integration is most conveniently �xed to the laboratory frame, r0. Of course, within our approxima-
tion (�rst order in � for perturbed �elds and second order for the energy), substitution of the Lagrangian
perturbations leads to the same result if the equilibrium condition
rp0 =1
cJ0 �B0;
is utilized.
The energy integral can be made slightly more transparent so that we may identify the sources of the
28

potential energy. The terms involving the pressure can be rewritten as
�12
ZV
� � r( gp0r � � + � � rp0)dV
= �12
ZV
r ���( gp0r � � + � � rp0)
�dV +
1
2
ZV
� gp0(r � �)2 + (r � �)� � rp0
�dV
=1
2
ZV
� gp0(r � �)2 + (r � �)� � rp0
�dV � 1
2
IS
( gp0r � � + � � rp0)� � dS; (2.155)
where the surface integral is over the entire plasma surface. Similarly, by noting
4�
c� � (B0 � J1)
= � � [B0 � (r�B1)]
= (r�B1) � (� �B0)
= r � [B1 � (� �B0)] +B1 �r� (� �B0)
= r � [B1 � (� �B0)] +B21 ; (2.156)
we �nd1
2c
ZV
� � (B0 � J1)dV =ZV
B218�dV +
IS
B0 �B18�
� � dS: (2.157)
It is noted that since the plasma surface is one of the magnetic surfaces, B0 �dS = 0 on S. Then Eq. ( 2.140)
reduces to
W =1
2
Z �B214�
� 1cJ0 � (B1 � �) + gp0(r � �)2 + (r � �)(� � rp0)
�dV
+1
2
I �B0 �B14�
� gp0r � � � � � rp0�� � dS: (2.158)
For perturbations limited within a plasma, the surface integral will make only a small contribution. In
this case, the �xed boundary assumption,
� � dS = 0;
may be imposed. Internal MHD modes, such as the high mode number ballooning mode and internal kink
mode belong to this category. For the external kink mode accompanied by global plasma motion, obviously
�xed boundary assumption must be removed. The magnetic �eld outside the plasma is also perturbed, and
analysis should include the vacuum region surrounding the plasma as well.
Each term in the volume integration of Eq. (2.158) can be interpreted as follows. The �rst term, B21=8�, is
the magnetic energy associated with perturbation. The perturbed magnetic �eld B1 consists of components
parallel and perpendicular to the unperturbed magnetic �eld, B0. The parallel components is associated
with magnetosonic (compressional Alfven) modes, while the perpendicular component is due to shear Alfven
mode. Whichever mode is involved, a positive work is required and thus stabilizing. The most dangerous
29

perturbation is therefore expected to be of a type without appreciable change in the magnetic �eld, such
as interchange mode. As we will see later in more detail, the ballooning instability, which is considered to
be an obstacle for achieving high �, is essentially an interchange, or �ute mode having perturbations highly
elongated in the direction of the con�ning helical magnetic �eld. The second term involves the unperturbed
plasma current itself, and is another form of magnetic energy. The unperturbed current J0 can also be
decomposed into parallel and perpendicular components with respect to B0. The perpendicular current
J0? is essentially the diamagnetic current which involves the plasma pressure gradient. The parallel current
J0k can destabilize the kink modes. The third term gp0(r � �)2 is the increase in the plasma kinetic
energy associated with sound waves. This term is positive de�nite and thus stabilizing. The last term,
(r� �)(� �rp0), contains the pressure gradient, and indicates a possible decrease in kinetic energy caused by
plasma expansion toward lower pressure. The sign of this term depends on the sign of r � �, and the danger
of pressure gradient driven MHD modes (e.g., the ballooning mode) occurs if r � � > 0. (Note that for
ballooning displacement, � � rp0 < 0:) The ballooning mode in a low � tokamak discharge will be analyzed
in the following section.
The usual procedure to be followed in stability analysis is to minimize the potential energy by varying the
form of displacement �. If the extremum obtained through this variational procedure turns out to be positive
(W > 0), MHD stability is ensured. Otherwise (W < 0), the prescribed equilibrium could be unstable within
the ideal MHD approximation. In the following two sections, some examples are presented.
2.7 High Mode Number Ballooning Mode
As is well known, a plasma is vulnerable to various instabilities when it (or its portion) is con�ned by a
curved magnetic �eld having a curvature radius directed away from the plasma. The e¤ective g is directed
outward in this case and plasma tends to expand outward. (Expansion, however, does not occur uniformly
since zeroth order equilibrium should exist, but does through instability. As the amplitude of perturbation
grows, the energy principle which is based on the linearized equation of motion should be extended to
higher order (nonlinear energy principle). Whether perturbations continue to grow after they have acquired
large amplitudes must be examined in terms of a nonlinear energy principle. At present, we lack general
formulation of this problem.) For ideal MHD stability, therefore, a plasma should see magnetic curvature
toward plasma itself everywhere. Unfortunately, this is theoretically impossible in closed toroidal con�nement
devices. A cusp-type device could have such a con�guration, but a cusp (mirrors, too) cannot be completely
closed. In toroidal devices, bad curvature and good curvature regions coexist, and MHD stability is achieved
in a sense of average over a given magnetic surface.
The ballooning mode is essentially an interchange mode having mode structure highly elongated along
a magnetic �eld line. Because of �nite magnetic shear, pure �ute instability cannot occur in tokamaks and
30

stellarators. However, the ballooning mode is almost �ute-like, which is of course the most dangerous type
of perturbation since it does not appreciably deform magnetic �eld lines (small B21 in Eq. (2.158)).
Since ballooning instability is radially localized, we may neglect the surface integral term in Eq. (2.158).
This approximation is justi�able particularly for short cross �eld wavelengths (large k?), and allows us to
develop a reasonably accurate analytical description of the instability. (For long wavelength modes, both
radial localization and �xed boundary assumption fail. Minimization must usually be done numerically in
this case.)
The integral to be evaluated is therefore
W =1
2
ZV
�B214�
� 1cJ0 � (B1 � �) + gp0(r � �)2 + (r � �)(� � rp0)
�dV: (2.159)
The perturbed magnetic �eldB1 may be decomposed into componentsBk andB?, parallel and perpendicular
to the unperturbed magnetic �eld B0. Since
B1 =r� (� �B0) ;
the parallel component can be found from
Bk =B0B0
� [r� (� �B0)]
=B0B0
� [�?(r �B0)�B0(r � �?) + (B0 �r)�? � (�? �r)B0]
= � 1
B0
��? �r(4�p+B20) +B20r � �?
�; (2.160)
where we have exploited the following: r �B0 = 0;
B0 � (B0 � r�?) = B � r(B0 � �?)� �? � (B0 � rB0) = ��? � (B0 � rB0); (2.161)
B0 � (�? �rB0) =1
2�? �rB20 ; (2.162)
and the equilibrium condition
r�p0 +
B208�
�=1
4�B0 �rB0; (2.163)
which is of course identical to
rp0 =1
cJ0 �B0:
Similarly, we decompose the unperturbed current J0 into parallel (J0k) and perpendicular (J0?) components.
31

The perpendicular current J0? is the diamagnetic current,
J0? = cB0 �rp
B20:
Then,
1
cJ0? � (� �B1) =
1
B20(B0 �rp0) � [� � (r� (�? �B0))]
=1
B20[(B0 � �) (rp0 �r� (�? �B0))� (B0 �r� (�? �B0))rp0 � �?]
=1
B20
hB0�krp0 �B? �B0Bkrp0 � �?
i: (2.164)
Substituting this into Eq. (2.159), and rearranging, we obtain
W =1
2
ZV
"B2?4�
+1
4�
�Bk �
4�
B0� � rp0
�2� 1cJ0k � (B1 � ��)
� 1
B20� � rp0
�� � r(8�p0 +B20)
+ gp0(r � �)2
+1
B20[(B0 � �k)(rp0 �B1) + (r � �k)(� � rp0)]
�dV: (2.165)
The �rst term in the RHS is the magnetic energy associated with magnetic �eld line bending (shear Alfven
mode). This stabilizing term remains �nite in toroidal devices since magnetic �eld lines are �anchored�
because of the poloidal magnetic �eld. The second term is the energy associated with compressional Alfven
mode (magnetosonic mode). An increase in the magnetic energy due to compression of magnetic �eld lines
can be compensated by the decrease in the plasma kinetic energy due to convection. Therefore, for certain
types of displacement �, this term can be vanishing and such displacement is the most dangerous one. The
third term is responsible for kink instability, and for high mode number ballooning modes, it may be ignored.
The fourth term is the ballooning term. Using the equilibrium condition, we may rewrite this term as
� 2
B20(�? �rp0)[�? � (B0 �rB0)]; (2.166)
which is in the form of the product, pressure gradient � magnetic curvature. In the bad curvature region
where the directions of the pressure gradient and magnetic curvature coincide, this term is negative, and
provides a destabilizing drive for the ballooning mode. If the contribution from this ballooning term exceeds
the stabilizing Alfven term (the �rst term in Eq. (2.165)), the ballooning mode is expected to become
unstable. The remaining three terms are negligibly small in a low � plasma. In this case, the energy integral
32

is considerably simpli�ed as
W ' 1
2
ZV
�B2?4�
� 2(�? �rp0)(�? � �)�dV; (2.167)
provided the displacement eigenfunction � satis�es the following condition,
Bk �4�
B0� � rp0 / �? �r
�8�p0 +B
20
�+B20r � �? = 0: (2.168)
This condition is to avoid the strongly stabilizing magneto-sonic mode and minimize the second term in the
RHS of Eq. (2.165) to zero. In Eq. (2.167), � is the magnetic curvature vector de�ned by
� =1
B20B0 �rB0; (2.169)
which is approximately equal to the gradient of the magnetic �eld in a low � plasma. It is noted that the
most dangerous perturbation imposed by Eq. (2.168) is not divergence-free, for it involves compression of
the plasma �uid associated with the magneto-sonic and ion acoustic modes. The parallel component of the
magnetic �eld perturbation does not completely vanish for the same reason. Eq. (2.168) indicates thatr��?is proportional to the magnetic curvature. However, it is not quite an identity, because the divergence of the
E�B drift only involves the gradient of B0,
r � vE = �2vE �rB0B0
:
Eq. (2.168) is the condition to nullify the total pressure perturbation, plasma plus magnetic �eld,
p1 +B0 �B14�
' 0: (2.170)
When magnetosonic-type perturbations are avoided through the condition in Eq. (2.168), the electric
�eld perpendicular to the unperturbed magnetic �eld B0 is almost electrostatic. This can be seen from the
Faraday�s law,@B
@t= �cr�E ' �cr�E? =r� (v �B0): (2.171)
Magnetic perturbation parallel to B0 is found from
@Bk
@t= �cr? �E?; (2.172)
and that perpendicular to B0 is@B?@t
= �crk �E?: (2.173)
33

For Bk to be negligible, the curl of E? should almost vanish, which means that the electric �eld E? is almost
electrostatic, and can be given in the form of a gradient of a scalar potential, �;
E? = �r?�: (2.174)
This approximation is valid to order �: Substituting Eq. ( 2.174) into Eq. ( 2.173), we obtain the magnetic
perturbation B? in terms of the scalar potential,
@B?@t
= crk � (r?�) = c(b�r)(b �r�) (2.175)
where b = B0=B0 is the unit vector along the unperturbed magnetic �eld. Eq. ( 2.175) is an expected
result, for within ideal MHD approximation, the parallel electric �eld Ek given by
Ek = �rk��1
c
@Ak
@t: (2.176)
must almost vanish. Recalling B? 'r? �Ak; we readily obtain Eq. ( 2.175). Introducing a new functione� which is essentially the time integral of the scalar potential,e� = c
Z�dt;
we rewrite the energy integral in terms of e�;W =
1
2
ZV
�1
4�[b�r?(b �rke�)]2 � 2
B20[(b�r?e�) �rp0)][(b�r?e�) � �]� dV: (2.177)
Variation of this energy integral yields an Euler equation (di¤erential equation) for e�, which is (as it shouldbe) consistent with that derivable directly from the equation of motion and Maxwell�s equations as elaborated
in Section 2.5. For a tokamak discharge with shifted circular magnetic surfaces, the Euler equation for the
envelope function F (�) of the potential e� = F (�)ei(m��n�) is
d
d�
��1 + (s� � � sin �)2
� dFd�
�+ �[cos � + sin �(s� � � sin �)]F = 0: (2.178)
This is identical to Eq. (??) derived earlier based on perturbation method.
2.8 Kink Instability
Kink instability occurs in a current carrying plasma (such as tokamaks) when the current exceeds a critical
value. As the ballooning mode is driven by combination of pressure gradient and unfavorable magnetic
34

curvature, the kink mode is due to the nonuniformity in the plasma current. The instability may be visualized
in a twisted rubber string. If twisting exceeds a threshold, the rubber string develops helical deformation. In a
current carrying plasma con�ned in a magnetic �eld, twisting in the magnetic �eld is provided by the poloidal
magnetic �eld produced by the current, and it is expected similar plasma deformation occurs. In contrast to
the ballooning instability in which toroidicity (curvature and gradient in the toroidal magnetic �eld) is an
essential ingredient, the kink instability can occur in a straight discharge, although toroidicity signi�cantly
lowers the threshold current. There are two types of the kink instability, external kink and internal kink
modes. The external kink mode involves perturbation of the entire discharge, while the internal kink mode is
localized at a magnetic mode rational surface. The surface safety factor q(a) is actually the �gure to indicate
how remote a current carrying discharge is from the threshold for the external kink mode. For example,
if q(a) = 3:5 at the plasma edge, the discharge is expected to be stable against the n = 1 (toroidal mode
number) kink modes with the poloidal mode numbers m = 1; 2; 3 although higher m kink modes may still be
excited. Fortunately, higher order modes are less global, and thus less dangerous from plasma con�nement
point of view, and suppressing low n kink modes by choosing q(a) su¢ ciently large is the �rst step to establish
a macroscopically stable tokamak discharge. However, the internal region of a tokamak discharge can still be
subject to the internal kink mode which are con�ned in the vicinity of a magnetic surface on which the local
safety factor q(�) takes a rational number. In a tokamak discharge, the radial pro�le of the safety factor q(�)
is quite nonuniform, starting at q(� = 0) ' 1 (or less), and monotonically increases towards the periphery,
q(� = a) = 3 � 5: When q(� = a) = 3:5, for example, there are magnetic surfaces on which q = 1; 2; 3 inside
the discharge, and those magnetic surfaces are subject to the internal kink modes.
In analyzing the kink mode within the ideal MHD approximation, it is important to notice that the
unperturbed plasma current along the magnetic �eld denoted by J0k; is tilted by the magnetic perturbation
B? associated with the shear Alfven mode, and creates an e¤ective cross �eld current perturbation,
J1? =B?B0
J0k; (2.179)
in addition to the familiar cross �eld current perturbations due to the diamagnetic current and ion polariza-
tion current. Therefore, the divergence of the total cross-�eld current can be written down as
r � J1? ' cr�1
B20
��B0 �rp1 +
c2�mB20
d
dtr �E? +
1
B0(r�Ak) �r?J0k: (2.180)
Substituting this into the Ampere�s law combined with the charge neutrality condition
rk � r2?Ak =4�
cr � J?; (2.181)
35

and eliminating Ak through the ideal MHD condition Ek = 0; or kk� =!
cAk; we obtain
kkk2?kk��
!(! + !�i)
V 2Ak2?��
8�
B20((b� k?) �rp0) ((b� k?) � �)� +
4�
cB0rJ0k � (k? � kk�) = 0: (2.182)
The last term in the LHS indicates the kink driving due to the nonuniformity in the plasma current J0k:
Let us �rst consider the external kink mode. In this mode, the total plasma current, I0; rather than
the local gradient of the current density, is responsible for destabilization. For this reason, the toroidicity
(curvature in the magnetic �eld) may be ignored in the lowest order. For simplicity, we assume a uniform
plasma current in the quasi-cylindrical geometry (�; �; �); with a singular current density gradient at the
edge,dJ0k
d�= �J0�(�� a): (2.183)
Then, Eq. (2.182) becomes a Laplace equation for the scalar potential �;
r2?� = 0: (2.184)
Assuming a solution in the form
�(�; �; �) = R(�)ei(m��n�); (2.185)
we obtain the following solution for R(�);
R(�) =
8>>>><>>>>:
��a
�m; � < a
�a
�
�m; � > a
(2.186)
The gradient of this solution is discontinuous at � = a; and the second order derivative, d2R=d�2 thus yields
a delta function which is compatible with the gradient of the current density. Noting rJ0k � (k? � kk�) =
k�kkdJ0k
d��; we rewrite Eq. (2.182) ignoring the ballooning term as
kkr2?kk��!(! + !�i)
V 2Ar2?�+
4�
cB0k�kkJ0�(�� a)� = 0: (2.187)
Integrating once over � by noting 1=VA ! 0 outside the plasma, we obtain
k2kdR
d�
�����=a+0
��k2k �
!(! + !�i)
V 2A
�dR
d�
�����=a�0
+4�
cB0k�kkJ0R(� = a) = 0; (2.188)
wheredR
d�
�����=a+0
= �ma;
dR
d�
�����=a�0
=m
a: (2.189)
36

For the assumed uniform current density, the total plasma current is given by I0 = �a2J0; and the poloidal
magnetic �eld at the plasma edge by B�(� = a) =2�a
cJ0: Introducing the safety factor q(a) =
aB0RB�(a)
; we
thus obtain the following dispersion relation,
!(! + !�i)
V 2A= 2kk
�kk �
1
qR
�=
2
(qR)2(m� nq)(m� nq � 1); (2.190)
where kk = (m� nq)=qR has been substituted. For low values of m;n; the diamagnetic frequency !�i may
be ignored, and the instability condition (!2 < 0) is found to be
m� 1 < nq < m: (2.191)
The most dangerous mode is that having the lowest mode numbers, m = n = 1: The stability condition
for this mode is q(a) > 1 which imposes a limit for the total plasma current,
I0 <ca2
2RB0; or in MKS-Ampere units I0 <
2�a2
�0RB0: (2.192)
This critical current has been derived by Kruskal and Shafranov, and called the Kruskal-Shafranov current.
The uniform current assumed in the analysis is of course unrealistic. For an arbitrary current distribution
including toroidal e¤ects, extensive numerical analyses have been carried out in the past. In general, a peaked
current pro�le has been found to stabilize highm kink modes. To illustrate how this stabilizing e¤ect emerges,
we consider a discharge having minor radius a; but the current channel is restricted in the region 0 < � < b
(< a): The mode equation can be solved in a manner similar to the preceding case, and the stability condition
in this case is given by �b
a
�2<m� 1m
:
The m = 1 mode cannot be stabilized by the current restriction. However, m = 2 mode can be stabilized if
(b=a)2 < 0:5; m = 3 mode if (b=a)2 < 2=3; and so on. Qualitatively, stabilization due to current peaking can
be seen as follows. The internal inductance of a uniform current channel is independent of its radius,
Lil=1
2;
�in MKS,
Lil=�08�
(H/m)�; (2.193)
and the magnetic energy stored within the current channel, which drives the kink modes, is thus independent
of the radius of the current channel. By restricting the current channel to a radius smaller than the plasma
radius, the same amount of energy must be used to drive displacement of the entire plasma.
In numerical analyses, the current density pro�le in the form
J(�) = J0
�1�
��a
�2��;
37

is often used. The �peakedness�of the current pro�le can be controlled by the index �. In tokamaks, the
safety factor at the center (or at the magnetic axis) � = 0 somehow hovers around unity, and the index �
essentially controls the surface safety factor q(a) through the ratio � = q(a)=q(0)� 1 ' q(a)� 1: For � > 2
(q(a) > 3), the kink mode can be e¤ectively stabilized for all mode numbers, and this is the range in which
tokamaks are usually operated.
Inclusion of the ballooning e¤ect (namely, the toroidicity) in the kink mode usually requires numerical
analysis because the high n approximation, which leads to considerable simpli�cation as shown in the pre-
ceding Section, breaks down for low mode number kink mode. The critical pressure gradients for the low n
ballooning mode and internal kink mode are similar and somewhat higher than that of the high n ballooning
mode.
2.9 Tearing Modes
In a tokamak, the poloidal magnetic �eld is produced by the toroidal plasma current. The toroidal current
density J�(r) must be nonuniform (a function of minor radius �) to create �nite magnetic shear s,
s =�
q
dq
d�; (2.194)
where q(�) is the safety factor. Therefore, the origin of tearing instability may be found in the nonuniform
current density distribution which is known to cause electrostatic instabilities as well.
In contrast to the ballooning mode analyzed in the preceding Section, tearing instability is characterized
by low mode numbers m; n. Toroidal e¤ects (mainly curvature of toroidal magnetic �eld) are therefore
negligibly small, and we use a simple slab model. A magnetic rational surface on which kk = 0 is assumed
to be at x = 0, so that
kk = kyx
Ls; (2.195)
with Ls being the magnetic shear length.
Heuristically, the origin of the tearing instability may be seen as follows. In the vicinity of the magnetic
rational surface, kk ' 0 and the parallel electric �eld is dominated by the magnetic induction,
Ek ' �1
c
@Ak
@t: (2.196)
In the collisionless case, the electron current is therefore
Jke ' �n0e
2
mAk: (2.197)
38

Substituting this into Ampere�s law,
r2Ak = �4�
cJke; (2.198)
we obtain@2
@x2Ak =
�!pec
�2Ak; (2.199)
where j@=@xj � ky has been assumed. Integrating over x from �� to � where � is the radial position at
which transition from the free acceleration to MHD regime (Ek ' 0) occurs, we �nd
�0 =�!pec
�2�; (2.200)
where
�0 =
@Ak
@x
�����
�@Ak
@x
������
Ak(0); (2.201)
is the discontinuity in the radial derivative of the vector potential and called the tearing parameter. �0 has
dimensions of 1/length and typically of the order of the inverse plasma radius, �0 ' 1=a: The transition
occurs approximately at the radial position where
kkvTe ' �i! = ;
or
� =Ls
kyvTe : (2.202)
Therefore, the growth rate of the collisionless tearing mode may be estimated as
=
�c
!pe
�2kyvTeLs
�0: (2.203)
A more accurate analysis based on the electron current
Jke =n0e
2
kkTe(!�e � !)
��� !
kkcAk
�[1 + �eZ(�e)] ; (2.204)
which derives from the electron drift kinetic formulation, essentially yields the same result. Ampere�s law
now reads
@2
@x2Ak = �
4�n0e2
cTekk(!�e � !)
��� !
kkcAk
�[1 + �eZ(�e)] ; (2.205)
39

where the argument of the plasma dispersion function Z(�e) is
�e =!
jkkjvTe: (2.206)
Since kk / x, electron current Jke should strongly depend on the coordinate x. For small jxj such that
j�ej � 1, electrons are freely accelerated by the parallel electric �eld. In this region, the scalar potential may
be neglected, and Eq. (2.205) becomes
@2
@x2Ak =
!2pec2
! � !�e!
Ak; (2.207)
which di¤ers from the previous form only through the presence of the diamagnetic frequency !�e: For the
vector potential to vary smoothly over the region of free acceleration (called current layer), the frequency !
must be close to the electron diamagnetic frequency !�e. This de�nes the width of the current layer,
� ' !�eLskyvTe
=Lsa
rm
M�s; (2.208)
where a is the dimension of the slab corresponding to the minor radius in tokamak geometry, m=M is the
electron-ion mass ratio, and �s is the ion Larmor radius with the electron temperature introduced earlier.
In typical tokamaks,Lsa
rm
M' qR
a
rm
M; (2.209)
is of order unity, and � becomes of order �s. This makes the applicability of hydrodynamic approximation
for ions questionable. However, tearing modes are primarily electromagnetic being dominated by the vector
potential Ak, and for the purpose of qualitative evaluation of the growth rate, the scalar potential � may be
entirely dropped. Doing so, we rewrite Eq. (2.205)
d2
dx2Ak = �
!2pec22!(! � !�e)
v2Tek2k
[1 + �eZ(�e)]Ak
= �2!2pec2
�1� !�e
!
� X2
x2
�1 +
x
jxjZ�x
jxj
��Ak; (2.210)
where
X =!LskyvTe
: (2.211)
Outside the current layer, the vector potential Ak varies slowly and may be regarded as constant. Integrating
Eq. (2.210) once, we obtain
d
dxAk
�������
= �2Ak(0)!2pec2
�1� !�e
!
�ip�X: (2.212)
40

Recalling the de�nition of �0;
�0 =1
Ak(0)
dAk
dx
�����
�dAk
dx
������
!; (2.213)
we obtain the solution for !,
! = !�e + i ; (2.214)
where
=�0c2=!2pe2p�X=!�e
=�0
2p�
kyvTeLs
�c
!pe
�2; (2.215)
is the growth rate of the collisionless tearing instability. This di¤ers from the earlier estimate only by a
numerical factor. In evaluating the integral, note that
1 + �Z(�) = �12
d
d�Z(�): (2.216)
Then
Z 1
�1
1
x2
�1 +
X
jxjZ�X
jxj
��dx
= � 1X
Z 1
0
d
dyZ(xy)dy =
1
X[Z(0)� Z(1)] = 1
Xip� (2.217)
The collisionless tearing mode was �rst analyzed by Laval et al.
The analysis presented above appears plausible. However, it should be pointed out that the scalar
potential � is largely ignored and no account has been taken of the charge neutrality (or more precisely,
Poisson�s equation). The analysis is still very much qualitative and it is not obvious the tearing instability as
described above should exist. An analysis based on an integral equation formulation has indicated otherwise
and as long as linear tearing modes (both collisionless and collisional) are concerned, there should be no
instabilities at least in slab geometry. In tokamaks, the existence of magnetic islands has been well con�rmed
experimentally and is attributed to tearing mode activity. Toroidicity, error magnetic �eld, and nonlinearity
may have destabilizing e¤ects on the tearing mode in toroidal devices.
The collisionless approximation breaks down when the collision frequency �c exceeds the growth rate.
Tearing instability is still operative, however, with even larger growth rates. In order to see this transition
from collisionless to collisional regime in a qualitative manner, we must �rst �nd how the collision frequency
�c modi�es the electron current. Full collisional e¤ects may be described by Fokker-Planck collision operator.
However, as long as momentum transfer collisions between electrons and ions are concerned, a simpli�ed
Krook collision operator �@fe@t
�c
' ��c(fe � fM ); (2.218)
may su¢ ce. The Krook operator conserves particle numbers. Furthermore, the electron distribution function
41

initially deviated from Maxwellian fM (v2) relaxes to Maxwellian through collisions.
With the Krook collision term incorporated, the linearized drift kinetic equation for electrons in slab
geometry becomes
�@
@t+ vk �r
�f1 + vE �rfM � e
mEk
@fM@vk
+ vkB?B0
�rfM = ��c�f1 �
nen0fM
�; (2.219)
where ne is the electron density perturbation,
ne =
Zf1d
3v =
�1 +
! � !�e + i�cjkkjvTe
Z(�e)
��� ! � !�e
kkc(1 + �eZ(�e))Ak
1 +i�c
jkkjvTeZ(�e)
e
Ten0; (2.220)
with
�e =! + i�cjkkjvTe
; (2.221)
being the argument of the plasma dispersion function Z(�). The electron current parallel to the magnetic
�eld is given by
Jke =n0e
2
kkTe(!�e � !)
1 + �eZ(�e)
1 +i�ckkvTe
Z(�e)
��� !
kkcAk
�: (2.222)
In the limit of high collision frequency
�c � ! ; !�e ; kkvTe
Eq. (2.222) reduces to
Jke = �cEk
�1� !�e
!
�; (2.223)
where
�c =n0e
2
m�c; (2.224)
is the classical electron conductivity, and
Ek = �ikk�+ i!
cAk; (2.225)
is the parallel electric �eld. The appearance of the factor
1� !�e!
in the Ohm�s law, Eqs. (2.222) and (2.223) is peculiar to a nonuniform plasma, but may be understood as
42

follows. The �uid electron continuity equation in slab geometry is
@ne@t
+ vE �rn0 �1
erk � Jke = 0; (2.226)
where vE is the E � B drift which is the only electron cross-�eld current. (Recall that electron Larmor
radius and electron polarization drift are both negligible.) It should be emphasized that Eq. (2.226) is valid
only for slab geometry in which magnetic drift due to curvature and gradient of the con�ning magnetic �eld
are absent, and Eq. (2.226) should not be used in toroidal geometry. If ! = !�e, the electron density given
in Eq. (2.220) becomes
ne =!�e!
e�
Ten0 =
e�
Ten0: (2.227)
Therefore, the terms in@ne@t
+ vE �rn0
cancel each other, and Jke = 0. A similar situation occurs in low collision frequency limit provided electrons
are adiabatic, ! � kkvTe, so that the Boltzmann response
ne =e�
Ten0; (2.228)
holds.
In collisional tearing modes, the electron current along the magnetic �eld is reduced from the collisionless
case and the current layer width � is to be determined from the charge neutrality condition. From the
electron continuity equation@ne@t
� 1er � Jke = 0; (2.229)
we obtain
ne =ikkn0e
m �cEk =
ikkn0e
m �c
��ikk��
cAk
�; (2.230)
where is the growth rate which is assumed to be much larger than the diamagnetic frequency. The ion
density perturbation in the limit � !� is simply
ni = �2s@2�
@x2en0Te
; (2.231)
which is subject to (k?�i)2 � 1. From the charge neutrality condition ne = ni; we �nd the width of the
current layer is approximately given by
� '�L2sk2y
m �cM2i
�1=4: (2.232)
43

Substituting this into
�0 =4�
c2 n0e
2
m�c�; (2.233)
we �nd the following expression for the growth rate,
= �04=5�kyLs
�4=5�c
!pe
�8=5�M
m
�1=5�3=5c
2=5i : (2.234)
Note that in both collisionless and collisional tearing modes, the electron skin depth c=!pe emerges as a
natural radial scale length. In present day tokamaks, the � factor exceeds the electron/ion mass ratio which
means �i (the ion Larmor radius) > c=!pe: The hydrodynamic assumption (k?�i)2 � 1 thus breaks down
if the radial scale length is comparable with the skin depth. As mentioned earlier, a more satisfactory
treatment of tearing modes necessarily involves solving an integral equation. If done so, however, the linear
tearing instability disappears.
2.10 Hall MHD
The basic �eld equation in MHD is the Ohm�s law,
E+1
cv �B0 = �J;
where � is the plasma resistivity. In ideal MHD, the plasma is assumed to be ideally conducting, � = 0;
E+1
cv �B0 = 0:
In collisionless Hall MHD, the Ohm�s law is modi�ed as
E+1
cv �B0 =
1
n0e
�1
cJ�B0 �rpe
�; (2.235)
where v is the average plasma velocity de�ned by
v =Mvi +mveM +m
;
and the plasma current is by de�nition,
J = en0 (vi � ve) :
To derive Eq. (2.235), we recall the linearized collisionless equation of motion for ions and electrons,
Mn0@vi@t
= n0eE+1
cen0vi �B0 �rpi; (2.236)
44

mn0@ve@t
= �n0eE�1
cen0ve �B0 �rpe; (2.237)
where pi(e) is the ion (electron) pressure perturbation which is assumed to be isotropic. Adding the two
equations, we obtain
�m@v
@t=1
cJ�B0 �rp; (2.238)
where �m = (M +m)n0 is the mass density. The plasma velocity v; ion velocity vi and current density J
are related through
vi = v +m
M +m
J
n0e: (2.239)
Another equation can be constructed multiplying Eq. (2.236) by m; Eq. (2.237) by M and subtracting the
latter from the former. The result is
Mmn0e
@
@t
�J
n0
�= e�mE�mrpi +Mrpe +
en0c(mvi +Mve)�B0; (2.240)
orMmn0e
@
@t
�J
n0
�= e�mE�mrpi +Mrpe +
en0c
��mn0v � (M �m) J
n0e
��B0; (2.241)
where use is made of the manipulation,
mvi +Mve = Mvi +mve +M (ve � vi) +m (vi � ve)
=�mn0v � (M �m) J
n0e:
If the electron mass is ignored compared with the ion mass in Eq. (2.241), we obtain
E+1
cv �B0 '
1
n0e
�1
cJ�B0 �rpe
�: (2.242)
This is called the generalized Ohm�s law.
Curl of Eq. (2.242) yields
@B
@t= r�
��v � J
n0e
��B0
�= r�
��v � c
4�n0er�B
��B0
�; (2.243)
where the Faraday�s law
r�E = �1c
@B
@t; (2.244)
45

Ampere�s law
r�B =4�cJ;
and the identity r�rpe = 0 are used. If the pressure perturbation is assumed to be isotropic,
p = P0n
n0; (2.245)
where P0 is the unperturbed pressure, we �nd p in terms of the velocity,
p =k � v!
P0;
where the density perturbation n has been eliminated through the continuity equation
@n
@t+ n0r � v = 0: (2.246)
However, the assumption of isotropic pressure perturbation is dubious in collisionless plasmas. For example,
in the Alfven wave characterized by intermediate frequency kkvTi < ! < kkvTe; electron pressure pertur-
bation is adiabatic and isotropic but that of ions is anisotropic. Strictly speaking, Hall MHD breaks down
when the ion temperature is �nite as recently shown through comparison with fully kinetic analysis. For
example, Hall MHD yields the following dispersion relation for MHD modes,
�!2 � k2kV 2A
� h!4 � k2
�V 2A + V
2s
�!2 + k2kk
2V 2AV2s
i=
�ck
!pi
�2k2kV
2A
�!2 � k2V 2s
�!2;
where c=!pi is the ion skin depth and Vs =p P0=�m is the sound speed based on the assumption of isotropic
plasma pressure perturbation. A kinetic dispersion relation becomes isotropic as expected and is given by
(!2 � k2kV 2A)h!4 � (k2V 2A + k2?V 2s? + k2kV 2sk)!2 + k2kfk2V 2skV 2A + ( ? + k � 2)k2?v2Tic2s
+( ? k � 1)k2?v4Tigi'�ck
!pi
�2k2kV
2A!
2(!2 � k2?c2s � k2?v2Ti � k2kV 2sk); (2.247)
where
c2s =TeM; V 2s? =
Te + ?TiM
; V 2sk =Te + kTi
M; (2.248)
with ? = 2 and k = 3 being the ion adiabaticity coe¢ cients perpendicular and parallel to the magnetic
�eld. Eq. (2.247) is valid when the ion Larmor radius is small, k?�i < 1:
46