Embed Size (px)
DESCRIPTION
Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011Mô hình hóa đối tượng chuyển động thẳng tạo trực tiếp và đề xuất cấu trúc điều khiển Modelling of directly generated linear motions and a proposal control structureLê Anh Tuấn, Phan Anh Tuấn, Nguyễn Viết Trường, Nguyễn Phùng Quang Trường ĐHBK Hà Nội e-Mail: [email protected]óm tắtBài báo đề xuất mô hình cho các yếu tố phi tuyến tĩnh bao gồm đàn hồi, khe hở, ma sát trong chuyển động thẳng. Một cấu trúc điều khiển cho h
Citation preview

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
Mô hình hóa đối tượng chuyển động thẳng tạo trực tiếp và đề xuất cấu trúc
điều khiển
Modelling of directly generated linear motions and a proposal control
structure
Lê Anh Tuấn, Phan Anh Tuấn, Nguyễn Viết Trường, Nguyễn Phùng Quang
Trường ĐHBK Hà Nội
e-Mail: [email protected]
Tóm tắt
Bài báo đề xuất mô hình cho các yếu tố phi tuyến tĩnh
bao gồm đàn hồi, khe hở, ma sát trong chuyển động
thẳng. Một cấu trúc điều khiển cho hệ thống gồm
động cơ tuyến tính và tải có sự xuất hiện của các yếu
tố phi tuyến tĩnh này được đề xuất đồng thời mô
phỏng được thực hiện để kiểm chứng tính thích hợp
của cấu trúc điều khiển này.
Abstract
This paper propose a model for several static
nonlinear elements, including spring force, backlash
and friction force in linear motion. A control strategy
for a system of linear motor and load which account
for static nonlinear elements was proposed and
investigated by simulation.
Ký hiệu
Ký hiệu Đơn vị Ý nghĩa
Chỉ số l Phía tải
Chỉ số m Phía động cơ
M kg Khối lượng
L m Chiều dài tự nhiên lò so
σ0 N/m Độ cứng sợi tiếp xúc
σ1 kg/s Hệ số tắt dần
σ2 kg/s Hệ số ma sát Viscous
z Độ uốn trung bình của các
sợi tiếp xúc
Fc N Lực ma sát Coulomb
Fs N Lực ma sát tĩnh
Ftrans N Lực truyền từ động cơ qua
lò xo tới tải
Fm N Lực điện từ
Ff N Lực ma sát
x m Vị trí trong hệ trục Oxy
xs m Vị trí đầu lò xo trong hệ
tọa độ Oxy
xBL m Vị trí đầu lò xo trong hệ
tọa độ O’xy
2a m Độ rộng khe hở
CS N/m Hệ số đàn hồi lò xo
v m/s Vận tốc
vs m/s Vận tốc Stribeck
isd,isq A Dòng điện stator trục d và
trục q
usd,usq V Điện áp stator trục d và
trục q
ψ p T Từ thông cực từ
τ Bước cực
p Số đôi cực
Rs Ω Điện trở stator
Lsd,Lsq H Điện cảm stator thành
phần trục d và q
1. Giới thiệu
Khác với động cơ quay, động cơ tuyến tính là động cơ
tạo ra chuyển động thẳng trực tiếp mà không cần đến
hệ thống dây đai, bánh răng, trục vít và do đó tránh
được hao mòn cơ học, nâng cao độ chính xác và động
học của hệ thống. Tuy nhiên, sự có mặt của các yếu tố
phi tuyến trong hệ thống và tác động trực tiếp của nó
gây khó khăn lớn tới việc điều khiển chính xác, làm
giảm động học và có thể gây mất ổn định hệ thống.
Bởi vậy, thực tế đòi hỏi cần phải xây dựng mô hình
của các yếu tố phi tuyến tĩnh để từ đó thiết kế các cấu
trúc điều khiển đáp ứng được các yêu cầu chất lượng.
486

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
2. Mô hình hóa các yếu tố phi tuyến tĩnh
2.1 Mô hình ma sát
Mô hình ma sát được sử dụng là mô hình LuGre .
Mô hình LuGre có cơ sở dựa trên mô tả sự tiếp xúc
giữa hai bề mặt là sự tiếp xúc của vô số các sợi nhỏ
(hình 1). Khi một lực được tác dụng lên một bề mặt
theo phương tiếp tuyến, những sợi tiếp xúc này bị uốn
cong sẽ phản ứng như những lò xo gây ra lực ma sát
H. 1 Mô tả bằng hình ảnh tiếp xúc hai bề mặt theo mô
hình LuGre
Mô hình LuGre thể hiện được những đặc điểm quan
trọng của ma sát trong thực tế:
Hiệu ứng Stribeck: là hiện tượng ở dải vận tốc nhỏ,
lực ma sát giảm khi vận tốc tăng lên
Dịch chuyển trong dải vi mô: Khi tác động một lực
nhỏ hơn lực ma sát tĩnh vào một vật đang tiếp xúc với
một vật khác, sẽ có sự dịch chuyển giữa hai vật dù là
rất nhỏ.
Vòng trễ trong quan hệ giữa lực ma sát và vận tốc:
Khi vận tốc đang giảm, lực ma sát có giá trị nhỏ hơn
so với khi vận tốc đang tăng. Vòng trễ này sẽ rộng
hơn khi tốc độ thay đổi của vận tốc càng lớn
Theo [1], mô hình ma sát kiểu LuGre có biểu diễn
toán học như sau:
0 1
( )
f
vdzv z
dt g v
dzF z
dts s
(1)
Nếu tính cả hàm ma sát nhớt:
0 1 2f
dzF z v
dts s s (2)
Hàm ( )g v được sử dụng để thể hiện ảnh hưởng của
hiệu ứng Stribeck và có công thức:
2( / )
0 ( ) ( ) Sv v
C S Cg v F F F es
2.2 Mô hình đàn hồi
Lực đàn hồi là một yếu tố có ảnh hưởng khá rõ trong
chuyển động thẳng tạo trực tiếp. Ta xét trường hợp
trục động cơ nối với tải qua một thanh truyền có độ
dài L và tạm thời coi khối lượng bằng zero. Do tính
đàn hồi của vật liệu, khi có lực tác động lên thanh
truyền, thanh bị biến dạng đàn hồi và độ biến dạng là:
m ll L x x
Khi đó, lực truyền tới tải chính là lực đàn hồi và theo
công thức
( )trans s s m lF C l C L x x (3)
2.3 Mô hình khe hở
Khi nối trục động cơ với tải, điểm nối phải đủ linh
hoạt cho chuyển động. Tuy nhiên, để đạt sự linh hoạt
như vậy, phần gối trục sẽ tồn tại một khe hở làm sai
lệch chuyển động. Xét khâu khe hở như hình H2
H. 2 Khe hở gối trục
Như ta đã biết, lực truyền đến tải transF chính là lực
đàn hồi. Khi khe hở tồn tại:
( )
S l BL
trans s S m S
trans S l m BL
x x x
F C l C L x x
F C L x x x
(4)
Việc xây dựng mô hình khe được dựa trên nguyên tắc
sau: Khe hở chỉ xuất hiện khi cả hai trường hợp sau
không xảy ra:
Trường hợp tiếp xúc trái: BLx a và Ftrans<0
Trường hợp tiếp xúc phải: BLx a và Ftrans >0
Các trường hợp này chia mặt phẳng thành 3 miền như
sau:
, : 0m l l mA x x L x x a : miền không xảy
ra hiện tượng khe hở
, : 0m l l mA x x L x x a : miền không xảy
ra hiện tượng khe hở
0 , \ ( ) m lA x x A A : miền xảy ra khe hở
Với mỗi miền, ta có các phương trình
487

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
0
( , )
0 ( , )
( , )
S l m m l
trans m l
S l m m l
C L x x a x x A
F x x A
C L x x a x x A
(5)
3. Cấu trúc điều khiển
3.1 Xấp xỉ khâu khe hở
Với hàm truyền lực dạng gián đoạn như phương trình
(5), sẽ rất khó thiết kế một bộ điều khiển phù hợp. Ta
cần mô tả Ftrans dưới dạng một hàm liên tục. Theo [5],
khâu khe hở có thể được xấp xỉ thành một hàm liên
tục với
( )trans S m l m lF C x x L atanh k x x L (6)
Sai số khi xấp xỉ
H. 3 Sai số khi xấp xỉ khâu khe hở
3.2 Bộ quan sát ma sát
Hệ phương trình chuyển động của tải
l
ll trans flx
x v
M F F
(7)
Sử dụng mô hình LuGre, hệ phương trình chuyển
động của tải dưới tác động của lực ma sát được biểu
diễn như sau:
0 11 2
0 1 0
( ) ( )0
0 1
l l
l l ll ll l
l l
l l
l
x xvd
v vdt M M
z zv
s s bs s
b
0
1
0
trans
l
FM
(8)
ly x
Với ( )( )
l
l
l
vv
g vb
Nhận xét thấy rằng, với Ftrans là đầu vào, nếu coi
( )lvb là hằng số trong một chu kỳ trích mẫu (hoàn
toàn được do có thể coi lv là hằng trong một chu kỳ
trích mẫu) thì hệ (8) trở thành tuyến tính trong một
chu kỳ trích mẫu và do đó có thể sử dụng bộ quan sát
Lumberger để quan sát đối tượng biểu diễn bởi (8)
Sơ đồ bộ quan sát Lumberger:
H. 4 Bộ quan sát ma sát
Với sơ đồ này, các hệ số của bộ quan sát
1 2 3( ), ( ), ( )k k kb b b được xác định theo
phương pháp gán điểm cực. F chính là
đầu ra quan sát của lực ma sát thực tế.
3.2 Cấu trúc điều khiển backstepping kết hợp
khâu bù ma sát
Hệ phương trình chuyển động của trục động cơ và tải
khi xét đến đàn hồi, khe hở và ma sát được thể hiện ở
(9).
Trong đó, Ffl được coi đã biết do kết quả khâu quan
sát.
Hệ phương trình thể hiện cấu trúc theo kiểu chồng
tầng (cascade) gợi ý cho ta sử dụng phương pháp thiết
kế backstepping.
488

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
[ ]}
{ tanh
m m m trans
m m
l l trans fl
l l
m sq sd sq sd p
tr m lans s m l
M F F
v
M F F
v
F p i L L i
x
x
x
x
k x x LF C x x L a
pt
(9)
Đặt
1 2
2
3
3
1 ,
,
1
,
s s s
l m l
p
m
l m l
m l g sq
C C
x v x x x
x v v u i
Ca a
M M M
a pM
pt
Hệ (9) được chuyển thành dạng xếp chồng tường
minh hơn như sau
1 2
2 3
3 2 3
1 ˆ [ ]
1 1 1
trans fl
l
trans fl g
m l l
F x FM
x
F x F a uM
x
xM M
x (10)
Từ đây, áp dụng phương pháp thiết kế backstepping
để có được công thức của bộ điều khiển cho vòng
điều khiển vị trí. Cấu trúc điều khiển thể hiện trong
hình H.6
4. Kết quả mô phỏng và nhận xét
Mô phỏng thực hiện với bộ thông số động cơ
Số đôi cực: p=2
Điện trở mỗi pha: Rs=8.5 Ω
Bước cực: τ=72 mm
Điện cảm ngang trục : Lsd=0.047 H
Điện cảm dọc trục: Lsq=0.041 H
Từ thông cực : ψp=0.8373T
Khối lượng trục động cơ : Mm= 3.5Kg
Tải trên đầu trục động cơ, bên cạnh lực ma sát, nhóm
tác giả coi như là một lực Fc cố định (ví dụ lực ăn dao
dọc trục động cơ).
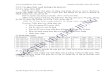
Kết quả mô phỏng phía dưới chỉ ra rằng trong cả hai
trường hợp khi có bù ma sát và không có bù ma sát,
quĩ đạo ra đều bám với quĩ đạo đặt. Nguyên nhân là
do khả năng của bộ điều khiển backstepping có thể
khắc phục được ảnh hưởng do nhiễu cũng như sai
lệch mô hình gây ra. Tuy nhiên, khi ma sát được bù,
sai số giữa quĩ đạo ra và quĩ đạo đặt đã giảm đi đáng
kể.
Khi không có bù ma sát:
H. 5 Quỹ đạo vị trí đặt và vị trí đạt được của tải
H. 6 Sai lệch giữa vị trí đặt và vị trí thực của tải
Hình H5 cho thấy biên dạng quỹ đạo đặt và thực. Tuy
nhiên, do khó quan sát sai lệch nên được bổ xung
bằng hình H6.
H. 7 Quĩ đạo vận tốc đặt và vận tốc thực của tải
H. 8 Sai lệch giữa vận tốc đặt và vận tốc thực của tải
489

Hội nghị toàn Điều khiển và Tự động hoá toàn quốc lần thứ nhât- VCCA-2011
H. 9 Cấu trúc điều khiển
Khi có bù ma sát:
H. 10 Quĩ đạo vị trí đặt và vị trí ra của tải
H. 11 Sai lệch giữa vị trí đặt và vị trí ra của tải
H. 12 Quĩ đạo vận tốc đặt và vận tốc ra của tải
H. 13 Sai lệch giữa vận tốc đặt và vận tốc ra của tải
Nhận thấy sai lệch quỹ đạo khi không bù ma sát lên
tới gần 4.10-4
so với khoảng 2.10-5
khi có bù ma sát.
Có nhận xét tương tự như vậy với đồ thị tốc độ trong
các hình H7-H8, H12-H13.
490

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
H. 14 Lực ma sát trên tải và lực ma sát từ bộ quan sát
5. Tài liệu tham khảo
[1] H. Olsson, Student Member, K. J. htrom, Fellow, P.
Lischinsky, "A New Model for Control of Systems
with Friction,, IEEE transactions on automatic
control, VOL. 40, NO.3, March 1995, Page [419-
425]
[2] J. Courtney-Pratt and E. Eisner, The Effect of A
Tangential Force on The Contact of Metallic
Bodies.: in Proc. Royal Society Publishing, vol.
A238, 1957, Page [529-550].
[3] M. A. Green, and C. A. Brockley V. I. Johannes,
The role of the rate of application of the tangential
force in determining the static friction coefficient.:
Wear, International Conference, vol. 24, 1973, Page[
381-385].
[4] Jeffrey W. Moscrop, Modelling, analysis and control
of linear feed axes in precision machine tools.: PhD
Thesis,University of Wollongong, 2008.
[5] Huỳnh Văn Đông,"Tổng hợp điều khiển thích nghi
dựa trên phương pháp Backstepping cho hệ truyền
động có đàn hồi, khe hở và ma sát khô phi tuyến,,
Luận văn tiến sĩ, Học viện kỹ thuật quân sự, 2009.
[6] S. Tei, D. Hoshino, M. Izutsu, and N. Kamamichi-
Department of Robotics and Mechatronics ,Tokyo
Denki University ,Japan J. Ishikawa, Friction
Compensation Based on the LuGre Friction Model.
Taiwan , SICE Annual Conference 2010, Page [9].
[7] Nguyễn Phùng Quang, Matlab và Simulink dành cho
kỹ sư điều khiển tự động.: Nhà xuất bản Khoa học
Kỹ thuật, 2009.
[8] Nguyễn Phùng Quang, Lê Ngọc Hưng, Ninh Văn
Cường,Nghiên cứu đặc tính phẳng của động cơ
tuyến tính đồng bộ kích thích vĩnh cửu và đề xuất
cấu trúc điều khiển trên cơ sở nguyên lý hệ phẳng.
Luận văn tốt nghiệp đại học, Khóa 50, Đại học Bách
khoa Hà Nội, 2010.
[9] Nguyễn Doãn Phước, Phan Xuân Minh, Hán Thành
Trung, Lý thuyết điều khiển phi tuyến, Nhà xuất bản
Khoa học và Kỹ thuật, 2008.
Lê Anh Tuấn tốt nghiệp đại
học tại trường Đại học Bách
khoa Hà nội, chuyên ngành
Tự động hóa XNCN, năm
2000. Tiếp tục học Thạc sỹ
chuyên ngành Đo lường và
các hệ thống công nghiệp.
Bảo vệ thành công luận văn
năm 2003 tại ĐH Bách khoa
Hà Nội. Từ năm 2000 đến
2003 là cán bộ của phòng thí
nghiệm trọng điểm về Tự động hóa, từ năm 2003 đến
nay là cán bộ nghiên cứu thuộc Trung tâm nghiên cứu
triển khai công nghệ cao-ĐH Bách khoa Hà nội, với
nhiệm vụ trưởng phòng Cảm biến và Cơ cấu chấp
hành. Hiện là nghiên cứu sinh của trường ĐH Bách
khoa Hà nội với hướng nghiên cứu: Điều khiển
chuyển động tịnh tiến tạo trực tiếp trong robot song
song dạng Hexapod.
Phan Anh Tuấn tốt nghiệp
chuyên ngành Điều khiển
tự động tại Trung tâm đào
tạo tài năng và chất lượng
cao, trường Đại học Bách
khoa Hà nội vào tháng
09/2011 với đề tài tốt
nghiệp là “Mô hình hóa
đối tượng chuyển động
thẳng tạo trực tiếp”. Từ
09/2011, làm việc tại trung
tâm tích hợp, viện ứng dụng công nghệ, bộ khoa học
công nghệ với vai trò cộng tác viên trong lĩnh vực xử
lý tín hiệu và điều khiển tự động.
Nguyễn Viết Trường học đại
học tại trường Đại học Bách
Khoa Hà Nội từ tháng 9/2006.
Học ở lớp kỹ sư tài năng – điều
khiển tự động của trường đại
học Bách Khoa Hà Nội. Đồ án
tốt nghiệp đại học chuyên ngành
điều khiển tự động với đề tài:
“Mô hình hóa và điều khiển
chuyển động thẳng tạo trực tiếp
bằng động cơ tuyến tính
(Modelling and control of Linear Feed Axes)”.Từ
6/2011 làm việc tại trung tâm nghiên cứu và triển khai
công nghệ cao (Hi-Tech) trực thuộc trường đại học
Bách Khoa Hà Nội.
491

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
GS.TSKH bảo vệ và nhận bằng
Dr.-Ing. habil tại CHLB Đức.
Là tác giả firmware điều khiển
đã được cài đặt trong các biến
tần REFU 402 Vectovar,
RD500 (REFU Elektronik),
Simovert 6SE42, Master Drive
MC (Siemens).
Ba năm 1996-1998 là giảng
viên tại TUD và được TUD
công nhận là Privatdozent. Từ 1/1999 là giảng viên
của ĐHBK Hà Nội. Tháng 2/2004 được TUD phong
Honorarprofessor, tháng 11/2004 nhận chức danh Phó
Giáo sư và 11/2009 Giáo sư về Tự động hóa của
ĐHBK Hà Nội.
Trong hơn 10 năm ĐHBK Hà Nội đã hướng dẫn 70
kỹ sư, 40 thạc sĩ, đã và đang hướng dẫn 8 NCS (trong
đó có 1 NCS người Đức của TUD). Là tác giả / đồng
tác giả của hơn 110 bài báo, báo cáo hội nghị trong và
ngoài nước. Là tác giả / đồng tác giả của 7 đầu sách
chuyên khảo và tham khảo, trong đó có 3 quyển bằng
tiếng Đức và 1 quyển tiếng Anh.
Các lĩnh vực nghiên cứu: điều khiển truyền động điện,
điều khiển chuyển động và robot, điều khiển vector
cho các loại máy điện, điều khiển điện tử công suất,
điều khiển các hệ thống năng lượng tái tạo (sức gió,
mặt trời), hệ thống điều khiển số, mô hình hóa và mô
phỏng.
492