-
8/16/2019 Modelos en Tiempo Discreto
1/41
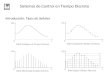
Sistemas en tiempo discreto
Introducción
A/D Regulad or D/A G(s)y(t)r(t) e(t) es(t)
û(t)Muestreador
Regulador Digital
Planta
e(t)
t
es(t)
tT
û(t)
tT
y(t)
t
-
8/16/2019 Modelos en Tiempo Discreto
2/41
-
8/16/2019 Modelos en Tiempo Discreto
3/41
Emulación analógica
Primero se realiza el análisis y la síntesis del regulador en
tiempo continuo
y luego se usa un proceso de discretización usando el periodo de
muestreo
T.
• La planta se modela en tiempo continuo
•
El regulador se diseña en tiempo continuo usando los
métodosconocidos.
• El regulador obtenido del proceso anterior se discretiza
usando un período de muestreo T y empleando alguna de las
aproximaciones
conocidas
-
8/16/2019 Modelos en Tiempo Discreto
4/41
-
8/16/2019 Modelos en Tiempo Discreto
5/41
Diseño digital directo
La planta en tiempo continuo es discretizada, generalmente por
el método
del retenedor de orden cero, obteniéndose así una aproximación
digital y
luego se calcula o sintetiza un compensador digital.
•
La planta se modela en tiempo continuo
• La planta es discretizada usando el periodo de muestreo
T y un
método de aproximación de los antes enumerados.
•
El regulador se calcula o sintetiza directamente en tiempo
discreto
usando cualquiera de los métodos siguientes:
-
8/16/2019 Modelos en Tiempo Discreto
6/41
-
8/16/2019 Modelos en Tiempo Discreto
7/41
f(t)
t
f s(t)
tT 2T 3T 4T 5T 6T
Retenedor Muestreador
f s(t)f(t) ^ f(t)
^f(t)
tT 2T 3T 4T 5T 6T
Proceso de la señal de tiempo continuo a tiempo
discreto
-
8/16/2019 Modelos en Tiempo Discreto
8/41
-
8/16/2019 Modelos en Tiempo Discreto
9/41
Discretización de sistemas descritos
por ecuaciones diferencialesDiscretización de la ecuación
diferencial de primer orden
)()( t but ay
dt
dy=+
cteba =,;
Sustituimos en la ecuación anterior kT t =
para k = 0, 1, 2 ...
y despejando
dt
dy para obtener:
-
8/16/2019 Modelos en Tiempo Discreto
10/41
( )kT t
kT t
t but aydt
dy=
=
+−= )()(
)()( kT bukT aydt
dy
kT t
+−==
Aproximamos la derivadaKT t dt
dy
= por el método de Euler para una función
y(t) continua.
T
kT yT k y
dt
dy
KT t
)())1(( −+
==
La cual es una buena aproximación si el periodo T es
pequeño.
-
8/16/2019 Modelos en Tiempo Discreto
11/41
)()()())1((
kT bukT ayT
kT yT k y+−=
−+
Multiplicamos a ambos lados por T y simplificamos el
resultado
escribiendo únicamente k en lugar de kT :
)()( k ykT y = y
)()( k ukT u =
y obtenemos:
)()()()1(
k yk ubT k yaT k y
+⋅+⋅−=+
Sustituyendo una vez más k k →−1 :
)1()1()1()( −⋅+−−=
k ubT k yaT k y Ecuación
de diferencias correspondiente a la ecuación diferencial de
primer orden.
-
8/16/2019 Modelos en Tiempo Discreto
12/41
Comportamiento de un sistema
discreto de primer orden.Los valores discretos y(k) = y(kT) de
la solución de y(t) pueden ser
calculados resolviendo la ecuación de diferencias.
Primero calculamos la solución homogénea: 0)( =k u
k ∀ por recursión:
1=k )0()1()1( yaT y −=
2=k [ ])0()1()1()1()1()2(
yaT aT yaT y −−=−=
)0()1()2( 2 yaT y −=
3=k )0()1()2()1()3( 3
yaT yaT y −=−=
)0()1()( yaT k y K −= ;
k = 0, 1, 2 ...
-
8/16/2019 Modelos en Tiempo Discreto
13/41
-
8/16/2019 Modelos en Tiempo Discreto
14/41
La solución exacta
Sustituyendo obtenemos
)0(...!3!2
1)(3322
yT aT a
aT k y
K
+−+−=
; k = 0, 1, 2 ...
Si 1
-
8/16/2019 Modelos en Tiempo Discreto
15/41
Satisfacción de las condiciones
Para cumplir la condición 1
-
8/16/2019 Modelos en Tiempo Discreto
16/41
La solución completa obtenida por recursión, es:
( )[ ]∑=
−−⋅−+−=
k
i
ik k iubT aT yaT k y
1
)1(1)0()1()(
y(0)
tT 2T 3T 4T 5T 6T
1)1(0 − aT
Sucesión de valores de salida y(kT) con (1-aT )
> 1
-
8/16/2019 Modelos en Tiempo Discreto
17/41
ResultadosPodemos observar que la respuesta natural de
y(kT) se amortigua al
aumentar el valor de k cuando 0 < (1-aT )
< 1 y vemos que la salida crecesin límite al aumentar el valor
de k cuando (1-aT ) > 1.
De la ecuación de diferencias podemos concluir que el valor
(1-aT ) es
la raíz de la ecuación de diferencias de primer orden. También
podemos
observar que el valor de esta raíz depende no sólo del
coeficiente a de la
ecuación diferencial; sino además del periodo de muestreo
T .
¿Cómo es la forma de la salida cuando )1( aT − es
negativo para loscasos en que su magnitud es menor que uno o mayor
que uno?
En conclusión, si las magnitudes de las raíces de la ecuación
de
diferencias son todas menores que 1 el sistema discreto es
estable y laestabilidad se ve afectada por el valor escogido para
el periodo de
muestreo T .
-
8/16/2019 Modelos en Tiempo Discreto
18/41
Sistemas de orden superior en el
dominio del tiempo discretoSistema en tiempo continuo
Sea la ecuación diferencial
ubdt
dub
dt
ud b
dt
ud b ya
dt
dya
dt
yd a
dt
yd a
q
q
qq
q
qn
n
nn
n
n 011
1
1011
1
1 ++++=++++ −−
−−
−
−
A la cual le corresponde el siguiente modelo SISO en variables
de
estado:
u⋅+⋅= BxAx ud c y
T ⋅+⋅= x
-
8/16/2019 Modelos en Tiempo Discreto
19/41
Sistema en tiempo discreto
Sea la ecuación de diferencias
)()1()()()1()( 0101
k ubk bqk ubk yak yank ya
qn +−++−=+−++−
A la cual corresponde el modelo SISO en variables de estado
)()()1( k uk k ⋅+⋅=+ dd
BxAx
)()()( k ud k ck y
T d ⋅+⋅= dx
Note que de nuevo se ha omitido el periodo T ya que es el mismo
para
todos los términos.
-
8/16/2019 Modelos en Tiempo Discreto
20/41
Derivación del modelo en tiempo discreto
a partir del modelo en tiempo continuo
Con la condición de que la entrada se mantenga constante durante
la
totalidad del tiempo T:
)()( kT ut u = ; para
T k t kT )1( +
-
8/16/2019 Modelos en Tiempo Discreto
21/41
kT t
t
d u Bt A
x At
t x ee
=
⋅
−+= ∫
0
)()(
)0()( τ τ τ
∫ ⋅−
+=kT
d u BkT A
x AkT
kT x ee0
)()(
)0()( τ τ τ
para el tiempo (k+1)T tenemos
∫+
⋅−+
++
=+T k
d u BT k A
xT k A
T k x ee)1(
0
)())1((
)0()1(
))1(( τ τ τ
si descomponemos la parte correspondiente a kT y a
T
-
8/16/2019 Modelos en Tiempo Discreto
22/41
∫
∫+
⋅−++
+⋅−+
+=+
T k
kT
kT
d u BT k A
d u BT k A
x AkT AT
T k x
e
eee
)1(
0
)())1((
)())1((
)0())1((
τ τ τ
τ τ τ
observamos que la parte en paréntesis rectangulares corresponde
a x(kT).
∫∫
+
⋅−+
+
⋅−
+=+
T k
kT
kT
d u BT k A
d u BkT A
x AkT AT
T k x eeee
)1(
0)(
))1(()(
)()0())1(( τ τ
τ
τ τ
τ
Si aplicamos la condición de que u(t) es constante durante
el intervalo
T segundos T k t kT )1(
+
-
8/16/2019 Modelos en Tiempo Discreto
23/41
)())1((
)())1((
)1(
kT ud BT k A
kT x AT
T k x
T k
kT
ee ⋅⋅−+
+=+ ∫+
τ τ
Realizando una sustitución de variable en la integral, (k+1)T -
τ = p, con
d τ = -dp y cambiando los límites de
integración tenemos:
)()())1((
0
kT udp B Ap
kT x AT
T k x
T
ee ⋅⋅−=+ ∫
Si además aplicamos el signo a la integral e invirtiendo los
límites de
integración obtenemos:
)()())1((
0
kT udp B Ap
kT x AT
T k x
T
ee ∫ ⋅⋅⋅+=+
-
8/16/2019 Modelos en Tiempo Discreto
24/41
simplificando la escritura haciendo kT = k y
sustituyendo la variable p de
nuevo por τ tenemos:
)()()1(0
k ud k xk x
T
⋅⋅+=+ ∫ τ BAτAT ee
)()()( k k k uDCxy ⋅+=
donde
TAA ed =
[ ] BIAABAτBd
1
d e ⋅−⋅=⋅= −∫
T
d
0
τ ; si A es NO singular
CCd =
T cc
d = DDd = d =dD
-
8/16/2019 Modelos en Tiempo Discreto
25/41
Ejemplo 1: Obtener el modelo en tiempo discreto para un sistema
escalar de1
er orden
uT
xT
x11
11+−= ; x(0) = 0
xk y s=
)(1
)()1(0 1
1
1
1 k uT
d k xk x
T T T
T
ee ∫ ⋅+−
=+−
τ
τ
10
1
1
11
)()()1(
T
k uT k xk x
T
T T
T
ee
⋅−+
−=+
− τ
)(1)()1( 11 k uk xk x
T
T
T
T
ee ⋅
−+
−=+
−
)()( k xk k y s ⋅=
-
8/16/2019 Modelos en Tiempo Discreto
26/41
donde
111 <−
= T
T
d eT
−=−−
11 11
T T
d eT
La ecuación de diferencias se obtiene al
multiplicar x(k+1) por k s.
( ) )(1)()1( 11
k uT k k xT k k xk
d sd ss ⋅−⋅+⋅=+⋅
agrupando reconocemos que )1()1( +=+⋅
k yk xk s y )()(
k yk xk s =⋅ por lo que
escribimos
( ) )(1)()1( 11
k uT k k yT k y
d sd ⋅−⋅+=+
si pasamos los términos que contienen y(k) a la
izquierda
( ) )(1)()1( 11
k uT k k yT k y
d sd ⋅−⋅=−+
sustituyendo la variable k = k - 1 tenemos
( ) )1(1)1()( 11 −⋅−⋅=−−
k uT k k yT k y
d sd ; 0)1( =− y
-
8/16/2019 Modelos en Tiempo Discreto
27/41
Ejemplo 2: Convertir a tiempo discreto el siguiente modelo de
segundo orden
)(1
0
)(0
10
)( t u M
t M k t f ⋅
+⋅
−= xx
[ ] )(01)( t t y x⋅=
Donde x1 es la posición, x2 es la velocidad
yu(t)
es la fuerza demanejo o de frenado aplicada a un carro.
Calculamos las matrices
discretizadas Ad y Bd para este sistema; para lo cual
es necesario primero
calcular la matriz de transición de estadosAte para la
matriz A dada; para
ello usamos la definición { })()( 1
s Lt Φ== −AteΦ
-
8/16/2019 Modelos en Tiempo Discreto
28/41
+
+
=
+
−=−=
−
−
s M
k s
M
k ss M
k s
ssI s
f
f
f
0
11
0
1)()(
1
1AΦ
Así
−
=
−
−
M
t k
M
t k
f
f
f
e
ek
M
0
11Ate
-
8/16/2019 Modelos en Tiempo Discreto
29/41
Entonces
−
==
−
−
M
T k
M
T k
f
f
f
e
e
k
M
0
11
ATd eA
−
−−
=
−
=⋅=
−
−
−
−
∫
∫∫
T M
k
f
T
M
k
f f
T M
k
T
M
k
f T
f
f
f
f
ek
ek M
k T
d e M
d ek
d
11
1
1
11 2
0
0
0
τ
τ
τ
τ
τ
BeB Aτ
d
Nótese que ya que la matriz A original en tiempo
continuo es singular, se harealizado el proceso de encontrar la
matriz Bd resolviendo directamente la integral.
-
8/16/2019 Modelos en Tiempo Discreto
30/41
Solución numéricaSi M = 1, k f = 0.1 y T = 0.1
entonces las matrices en tiempo discreto son:
=
9900.00
0995.01d
A,
=
0995.0
0050.0dB
El modelo en variables de estado para el sistema en tiempo
discreto es:
)1.0(0995.0
0050.0
)1.0(
)1.0(
9900.00
0995.01
))1(1.0(
))1(1.0(
2
1
2
1k u
k x
k x
k x
k x⋅
+
⋅
=
+
+
[ ]
⋅= )1.0(
)1.0(
01)1.0(2
1
k x
k x
k y
-
8/16/2019 Modelos en Tiempo Discreto
31/41
-
8/16/2019 Modelos en Tiempo Discreto
32/41
)1()2()0()0()( 1
−⋅+−⋅++⋅+⋅= −
k u Bk u B Au B A x Ak x
d d d d k
d
k
d
∑
−
=
−−⋅+⋅=
1
0
1)()0()(
k
j d
jk
d
k
d
ju B A x Ak x
donde
:)( k
d k AΦ = Matriz de transición de
estados discreta
por lo que
)()()1()0()()(1
0
k ud ju jk ck k yk
j
d
T T ⋅+⋅⋅−−⋅+⋅⋅= ∑−
=
BΦxΦc
-
8/16/2019 Modelos en Tiempo Discreto
33/41
Conclusión
Tenemos que la respuesta total está formada por la respuesta
homogénea yla respuesta forzada.
Respuesta homogénea: )0()( xΦc ⋅⋅
k T
Respuesta forzada: )()()1(
1
0k ud ju jk
k
j
d T ⋅+⋅⋅−−⋅∑
−
=BΦc
-
8/16/2019 Modelos en Tiempo Discreto
34/41
Representación de sistemas en t.
discr. en el dominio de la frecuenciaPropiedades de la
transformada Z
Linealidad
{ } { } { })()()()( k vbk uak vbk ua
⋅Ζ+⋅Ζ=⋅+⋅Ζ
Si
{ })()( k u zU Ζ= y {
})()( k v zV Ζ=
entonces:
{ } )()()()(
zV b zU ak vbk ua
⋅+⋅=⋅+⋅Ζ
-
8/16/2019 Modelos en Tiempo Discreto
35/41
Desplazamiento a la derecha en el
tiempo)()( z X k x ↔
)1()()1( 1 −+↔− −
x z X zk x
)1()2()()2( 12 −+−+↔− −−
x z x z X zk x
)1()2()1()()()( 21 −+++−++−+−+↔− −−−−
x zq x zq x zq x z X zqk x
qq
Si 0)( =k x ∀ k = -1,
-2 , -3, ... – q
entonces:
)()( z X zqk x q−↔−
-
8/16/2019 Modelos en Tiempo Discreto
36/41
-
8/16/2019 Modelos en Tiempo Discreto
37/41
Teorema del valor inicial
)(lim)0( z X x z ∞→=
[ ])0()(lim)1(
x z z X z x z
⋅−⋅=∞→
)1()1()0()(lim)( 1 −⋅−−−−= −∞→
q x z x z x z z X zq x
qqq z
-
8/16/2019 Modelos en Tiempo Discreto
38/41
Teorema del valor final
)()1(lim)(lim1
z X zk x zk
−=→∞→
Relación entre la transformada Z y la transformada de
Laplace
sT e z =
-
8/16/2019 Modelos en Tiempo Discreto
39/41
Función tr. del modelo en variables
de estado en tiempo discreto)()()1(
k uk k d d ⋅+⋅=+ BxAx
)()()( k uk k y d d
⋅+⋅= DxC
Transformando a Z con las condiciones iniciales iguales a cero,
0)0( = x
)()()( zU z z z d d
⋅+⋅=⋅ BXAX
)()()( zU z zY d d
⋅+⋅=
DXC
A d
-
8/16/2019 Modelos en Tiempo Discreto
40/41
Agrupando
)()()(
zU B z X A z X z
d d ⋅=⋅−⋅
( ) )()(
zU B z X A I z
d d ⋅=−⋅
Premultiplicando por( ) 1−−⋅
d A I z
( ) )()( 1
zU B A I z z X
d d ⋅−⋅= −
Sustituyendo X(z) en la ecuación para Y(z).
( ) )()()( 1
zU D zU B A I zC zY
d d d d ⋅+⋅−⋅⋅= −
A d
-
8/16/2019 Modelos en Tiempo Discreto
41/41
Agrupando
( ) )()( 1
zU D B A I zC zY
d d d d ⋅+−⋅⋅= −
y finalmente obtenemos la función de transferencia G(z).
( ) d d d d
z zU
zY zG DBAIC +−⋅⋅==
−1
)(
)()(