Embed Size (px)
Citation preview
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
1
INTRODUCCIÓN
El PC es para muchos usuarios una maquina misteriosa. Pero aunque parezca algo complejo, el ensamblaje de los componentes de un ordenador actual resulta sencillo para casi cualquier usuario. Montar un PC es similar a encajar las piezas de un puzzle de las que conocemos de antemano su posición.
En la actualidad, los ordenadores, ya sean de una u otra marca, están integrados por una serie de componentes independientes, intercambiables entre diferentes equipos y elaborados por distintos fabricantes. Son independientes porque cumplen funciones especificas, que se integran en el funcionamiento conjunto, pero sin perder su carácter individual; e intercambiables porque pueden funcionar igualmente en equipos con una configuración diferente, sin dejar de cumplir el cometido para el que fueron diseñados. Sin embargo, no basta con realizar el ensamblaje de las piezas que componen el PC, ya que este es solo uno de los pasos necesarios que debemos dar si pretendemos construir un ordenador personal. El proceso completo consta de cinco apartados básicos:
1. Elección de la configuración apropiada 2. Ensamblaje físico de los componentes y conexión de periféricos 3. Configuración de BIOS (Basic Input Output System) 4. Instalación del sistema operativo 5. Carga de los drivers de los dispositivos.
Una vez el ordenador está perfectamente montado, es necesario informarle a el
mismo de ciertas características o posibilidades de las piezas que lo integran, para el correcto funcionamiento y control del conjunto; aunque las características básicas son detectadas en la actualidad de un modo automático. Esto se efectúa en el programa Setup del llamado BIOS, que es el sistema básico del control interno del ordenador. Antes de utilizar las aplicaciones especificas para las cuales vamos a destinar el equipo, debe prepararse la unidad de disco duro, e instalar el sistema operativo, que es el conjunto de programas mediante los cuales el usuario controla la computadora y se comunica con ella. Por último, con el fin de permitir el control interno de los dispositivos periféricos, tendremos que cargar sus drivers correspondientes.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
2
DEFINICIÓN Y TIPOS DE COMPONENTES - LA CAJA Es el lugar que alberga las piezas internas que tiene el ordenador. Incluye un pequeño altavoz y una fuente de alimentación normalmente de 230 a 300 W, que proporciona dos tensiones diferentes, una para mantener los componentes electrónicos (5V), y otra para los mecánicos (12V). Dicha fuente dispone de un ventilador que sirve para refrigerarla. Los modelos antiguos presentaban en la zona delantera un display que indicaba la velocidad y los botones de encendido, modo turbo y reinicio (reset). En las carcasas modernas, no están presentes el display ni el botón de modo turbo. También en la parte delantera, se sitúan los testigos de encendido y lectura de disco duro (antiguamente, además el indicador de turbo), y los huecos para las unidades de disco flexibles (3”½ y 5”¼), las unidades de CD-ROM u otros dispositivos de almacenamiento 8grabadoras de CD, DVD, etc). En ciertos modelos, el botón de encendido sirve para activar o desactivar o desactivar el modo suspendido. En la parte trasera de la carcasa se localizan las conexiones del cable de alimentación, los huecos previstos para los puertos, teclado, ratón y USB, así como una serie de ranuras tapadas con láminas metálicas para los puertos de las tarjetas. TIPOS:
Puede realizarse una distinción previa en función de sus dimensiones. así, están disponibles, de menor a mayor tamaño: mini-torre, sobremesa (ambas de igual tamaño), semi-torre y torre. Las de sobremesa son las primeras que aparecieron y se disponen horizontalmente; los otros modelos se colocan en posición vertical.
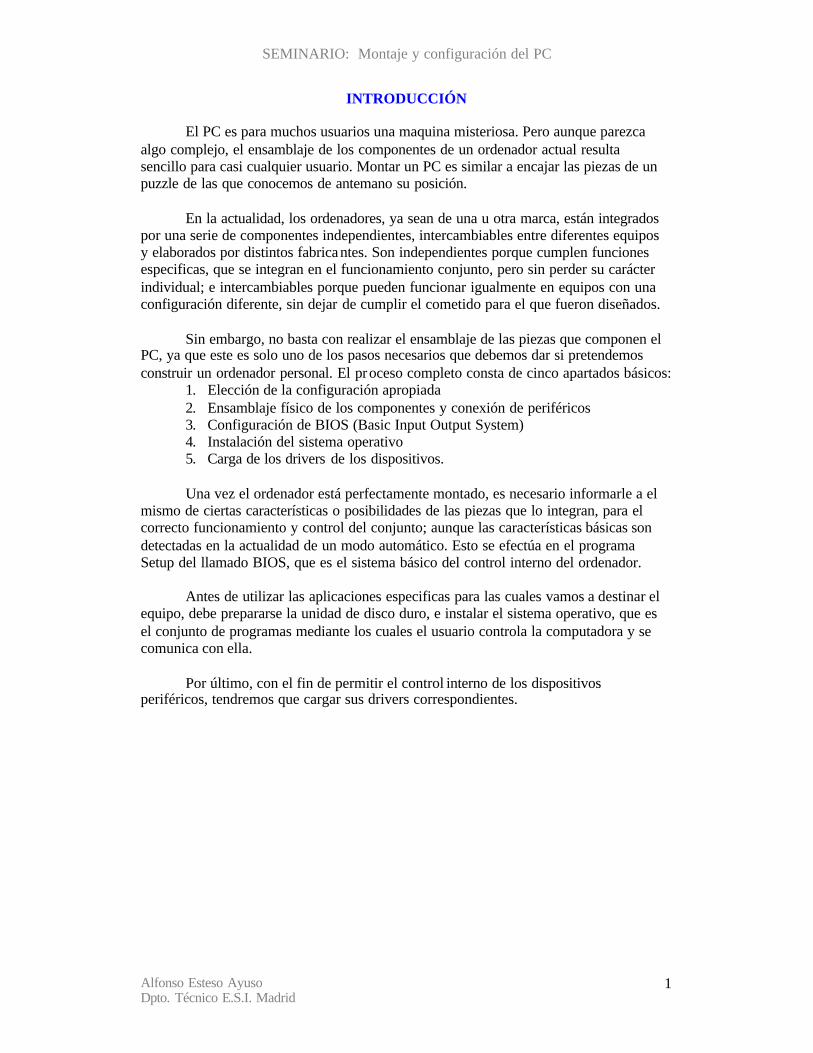
No obstante, la distinción mas útil quizás sea la que se refiere a la placa base que es capaz de albergar. Según este criterio, pueden distinguirse las cajas para placa ATX y para placa AT. Esto es algo que se debe tener muy en cuenta a la hora de seleccionar la caja, pues podría ocurrir que se elija una caja cuya fuente de alimentación no sea valida para la placa (ya que los conectores son distintos). CONECTORES DE LA FUENTE DE ALIMENTACIÓN Discos duros, disqueteras y unidades de CD-ROM
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
3
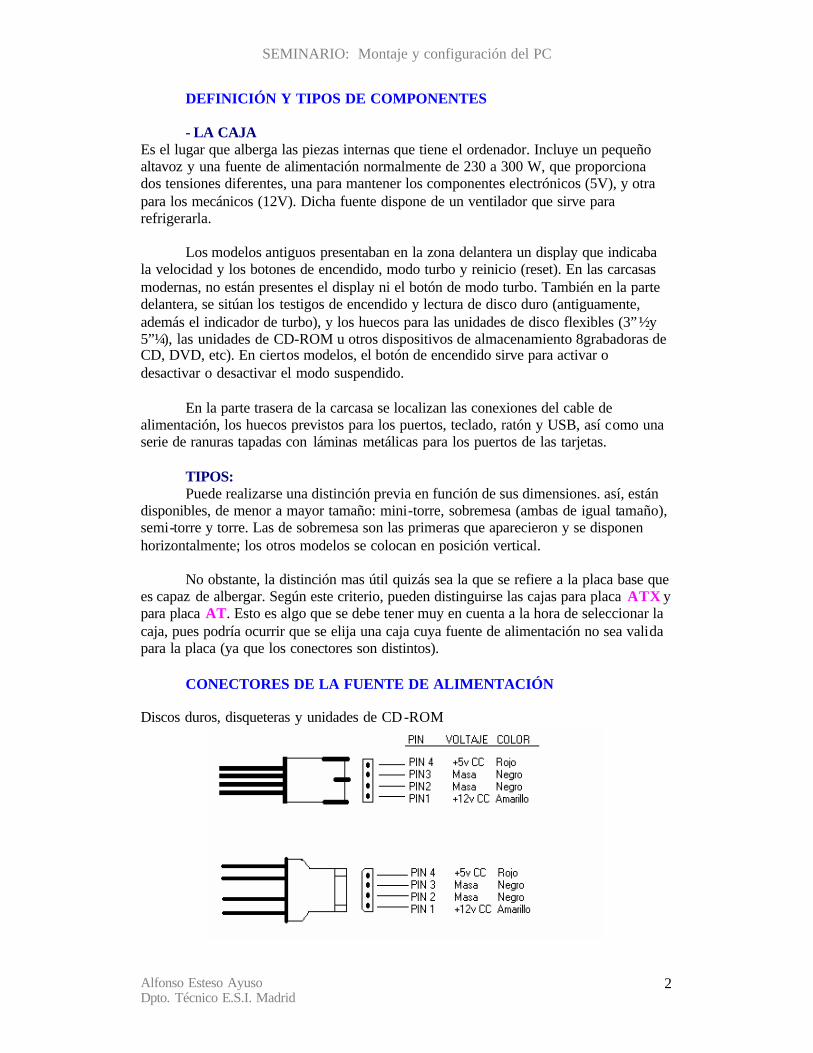
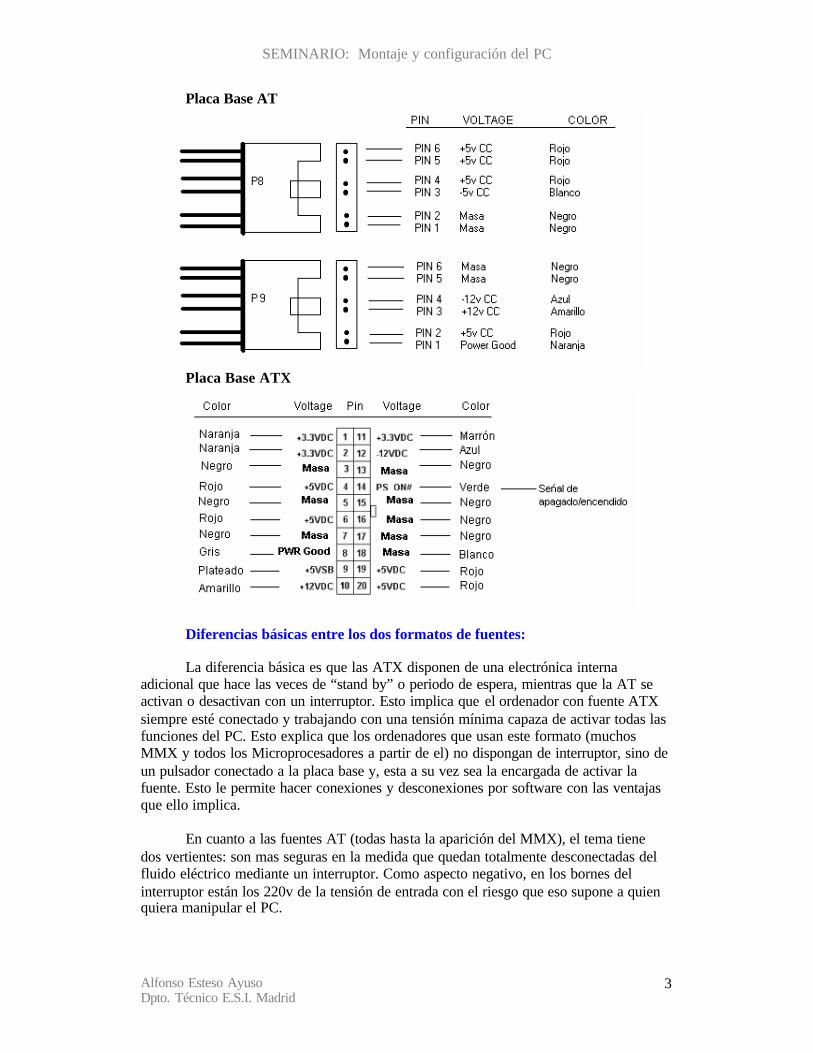
Placa Base AT
Placa Base ATX
Diferencias básicas entre los dos formatos de fuentes: La diferencia básica es que las ATX disponen de una electrónica interna
adicional que hace las veces de “stand by” o periodo de espera, mientras que la AT se activan o desactivan con un interruptor. Esto implica que el ordenador con fuente ATX siempre esté conectado y trabajando con una tensión mínima capaza de activar todas las funciones del PC. Esto explica que los ordenadores que usan este formato (muchos MMX y todos los Microprocesadores a partir de el) no dispongan de interruptor, sino de un pulsador conectado a la placa base y, esta a su vez sea la encargada de activar la fuente. Esto le permite hacer conexiones y desconexiones por software con las ventajas que ello implica.
En cuanto a las fuentes AT (todas hasta la aparición del MMX), el tema tiene dos vertientes: son mas seguras en la medida que quedan totalmente desconectadas del fluido eléctrico mediante un interruptor. Como aspecto negativo, en los bornes del interruptor están los 220v de la tensión de entrada con el riesgo que eso supone a quien quiera manipular el PC.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
4
- LA PLACA MADRE Es el componente principal del ordenador. En ella al margen de los componentes pasivos (resistencias, condensadores, etc), pueden distinguirse unos componentes básicos:
• Microchips: Son distintos componentes electrónicos construidos a base de transistores y circuitos integrados que cumplen distintas funciones, como son: Regular la frecuencia del reloj de la placa, controlar dispositivos, etc.
• Ranuras o Slots de expansión, donde se conectan distintas tarjetas • Zócalo o Slot para la conexión del Microprocesador • Memoria cache de acceso rápido, que agiliza las transferencias de datos entre
el Microprocesador y la memoria principal. • BIOS, que contiene los programas de control interno del ordenador, en una
sola memoria no volátil (ROM). Antiguamente no era posible modificarla, tan solo podían adaptarse sus características a un equipo concreto mediante su Setup, quedando las configuraciones, que si son volátiles, almacenadas permanentemente gracias a una pila. Actualmente, la mayoría de las BIOS se encuentran implementadas en memorias EEPROM, también llamadas Flash ROM, mas baratas y con mayor capacidad que otros tipos de ROM y que, además, tienen la ventaja de que pueden ser reprogramadas si es necesario. Cuando la placa base en la que van insertadas admite la posibilidad de reprogramarlas sin necesidad de separarlas de ella, entonces se denominan Flash BIOS.
• Bancos para la conexión de memoria RAM (dimms o simms, etc) • Conector para el teclado y el ratón • Conectores de los puertos (serie, paralelo, USB, IrDA, etc) • Un grupo de conexiones, llamadas DIP, que según se cierren o abran
configuran de uno u otro modo las características de ciertos componentes del PC, que no son posibles establecer en el setup de la BIOS. Los puentes que se usan para cerrar los DIP se denominan jumpers. En las placas modernas, no es necesario configurar los DIP, ya que estos vienen ya definidos de fabrica y, en cualquier caso, regulan aspectos internos que el usuario no debe modificar.
FORMATO FISICO DE LAS PLACAS BASE Partiendo de la funcionalidad común de los diferentes tipos de placas base, la
evolución y aparición de nuevos componentes ha hecho que el diseño de las placas haya variado. Así, el soporte para nuevas tecnologías como memoria DIMM, DDR, puertos USB, AGP, etc. Ha obligado a una mayor sofisticación de las placas base, pero también el mayor tamaño de los microprocesadores, necesidad de disipadores y aparición de nuevas ranuras ha exigido un cambio de disposición de componentes y variaciones en el tamaño.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
5
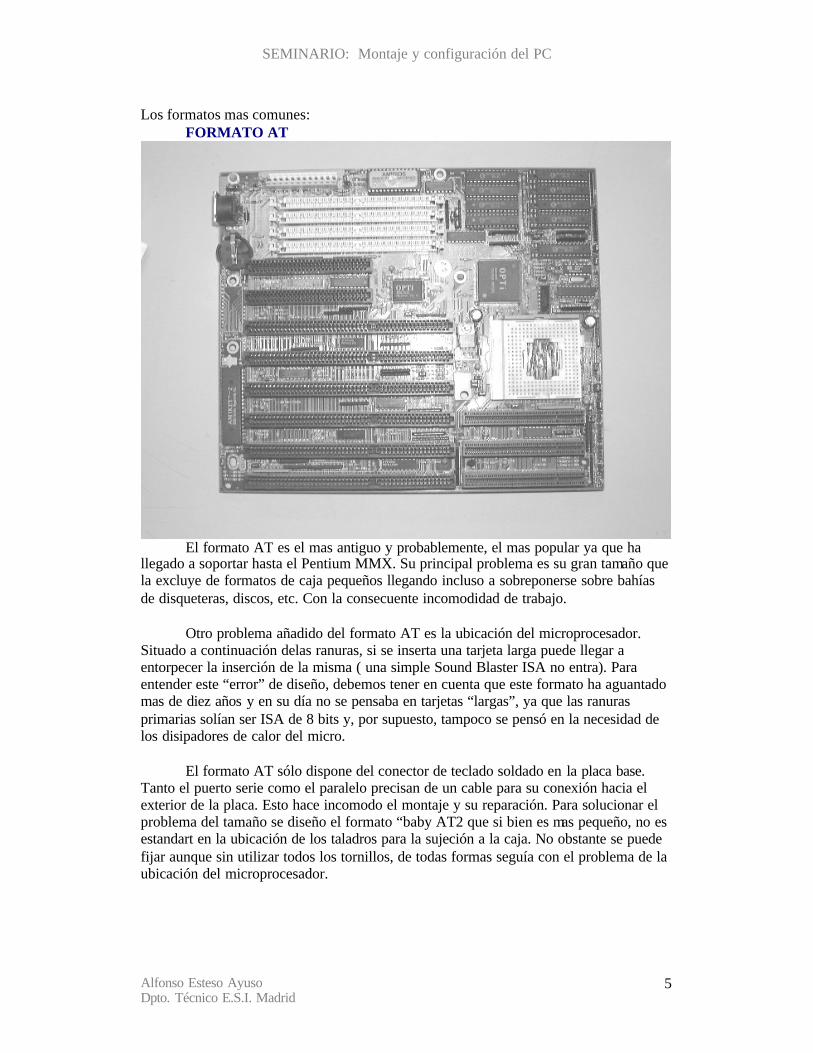
Los formatos mas comunes: FORMATO AT
El formato AT es el mas antiguo y probablemente, el mas popular ya que ha llegado a soportar hasta el Pentium MMX. Su principal problema es su gran tamaño que la excluye de formatos de caja pequeños llegando incluso a sobreponerse sobre bahías de disqueteras, discos, etc. Con la consecuente incomodidad de trabajo. Otro problema añadido del formato AT es la ubicación del microprocesador. Situado a continuación delas ranuras, si se inserta una tarjeta larga puede llegar a entorpecer la inserción de la misma ( una simple Sound Blaster ISA no entra). Para entender este “error” de diseño, debemos tener en cuenta que este formato ha aguantado mas de diez años y en su día no se pensaba en tarjetas “largas”, ya que las ranuras primarias solían ser ISA de 8 bits y, por supuesto, tampoco se pensó en la necesidad de los disipadores de calor del micro. El formato AT sólo dispone del conector de teclado soldado en la placa base. Tanto el puerto serie como el paralelo precisan de un cable para su conexión hacia el exterior de la placa. Esto hace incomodo el montaje y su reparación. Para solucionar el problema del tamaño se diseño el formato “baby AT2 que si bien es mas pequeño, no es estandart en la ubicación de los taladros para la sujeción a la caja. No obstante se puede fijar aunque sin utilizar todos los tornillos, de todas formas seguía con el problema de la ubicación del microprocesador.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
6
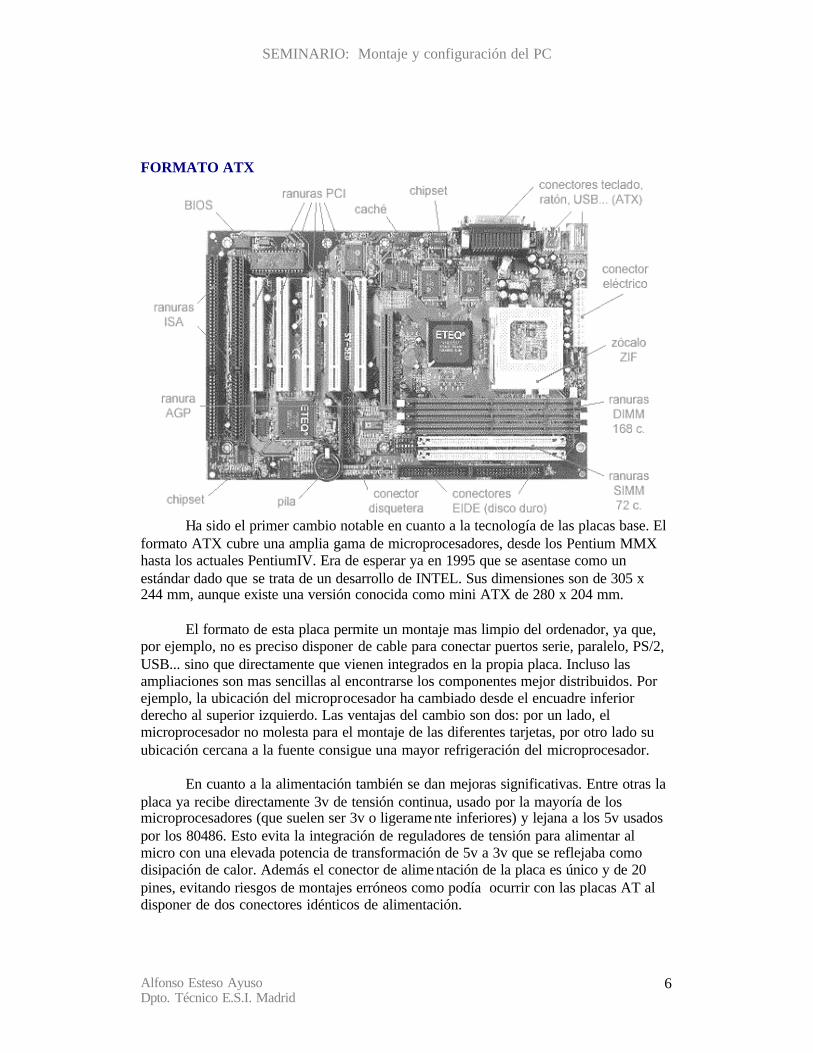
FORMATO ATX
Ha sido el primer cambio notable en cuanto a la tecnología de las placas base. El formato ATX cubre una amplia gama de microprocesadores, desde los Pentium MMX hasta los actuales PentiumIV. Era de esperar ya en 1995 que se asentase como un estándar dado que se trata de un desarrollo de INTEL. Sus dimensiones son de 305 x 244 mm, aunque existe una versión conocida como mini ATX de 280 x 204 mm. El formato de esta placa permite un montaje mas limpio del ordenador, ya que, por ejemplo, no es preciso disponer de cable para conectar puertos serie, paralelo, PS/2, USB... sino que directamente que vienen integrados en la propia placa. Incluso las ampliaciones son mas sencillas al encontrarse los componentes mejor distribuidos. Por ejemplo, la ubicación del microprocesador ha cambiado desde el encuadre inferior derecho al superior izquierdo. Las ventajas del cambio son dos: por un lado, el microprocesador no molesta para el montaje de las diferentes tarjetas, por otro lado su ubicación cercana a la fuente consigue una mayor refrigeración del microprocesador. En cuanto a la alimentación también se dan mejoras significativas. Entre otras la placa ya recibe directamente 3v de tensión continua, usado por la mayoría de los microprocesadores (que suelen ser 3v o ligerame nte inferiores) y lejana a los 5v usados por los 80486. Esto evita la integración de reguladores de tensión para alimentar al micro con una elevada potencia de transformación de 5v a 3v que se reflejaba como disipación de calor. Además el conector de alime ntación de la placa es único y de 20 pines, evitando riesgos de montajes erróneos como podía ocurrir con las placas AT al disponer de dos conectores idénticos de alimentación.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
7
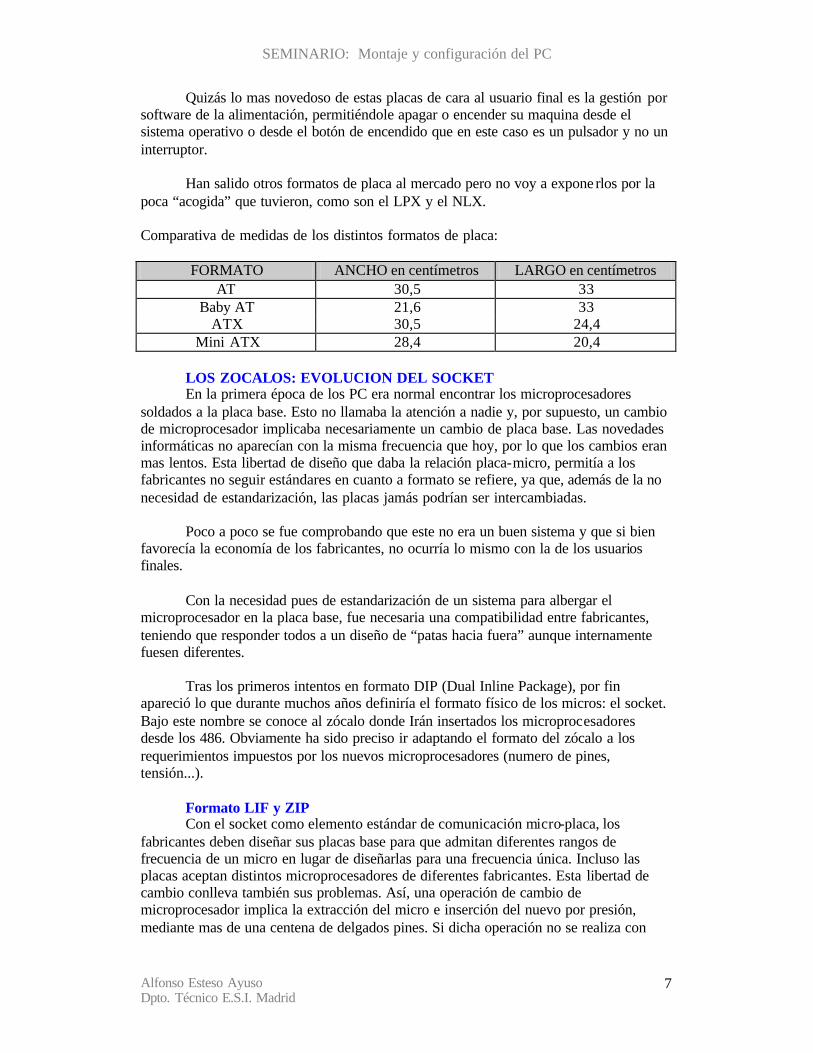
Quizás lo mas novedoso de estas placas de cara al usuario final es la gestión por software de la alimentación, permitiéndole apagar o encender su maquina desde el sistema operativo o desde el botón de encendido que en este caso es un pulsador y no un interruptor. Han salido otros formatos de placa al mercado pero no voy a expone rlos por la poca “acogida” que tuvieron, como son el LPX y el NLX. Comparativa de medidas de los distintos formatos de placa:
FORMATO ANCHO en centímetros LARGO en centímetros AT 30,5 33
Baby AT 21,6 33 ATX 30,5 24,4
Mini ATX 28,4 20,4 LOS ZOCALOS: EVOLUCION DEL SOCKET En la primera época de los PC era normal encontrar los microprocesadores soldados a la placa base. Esto no llamaba la atención a nadie y, por supuesto, un cambio de microprocesador implicaba necesariamente un cambio de placa base. Las novedades informáticas no aparecían con la misma frecuencia que hoy, por lo que los cambios eran mas lentos. Esta libertad de diseño que daba la relación placa-micro, permitía a los fabricantes no seguir estándares en cuanto a formato se refiere, ya que, además de la no necesidad de estandarización, las placas jamás podrían ser intercambiadas. Poco a poco se fue comprobando que este no era un buen sistema y que si bien favorecía la economía de los fabricantes, no ocurría lo mismo con la de los usuarios finales. Con la necesidad pues de estandarización de un sistema para albergar el microprocesador en la placa base, fue necesaria una compatibilidad entre fabricantes, teniendo que responder todos a un diseño de “patas hacia fuera” aunque internamente fuesen diferentes. Tras los primeros intentos en formato DIP (Dual Inline Package), por fin apareció lo que durante muchos años definiría el formato físico de los micros: el socket. Bajo este nombre se conoce al zócalo donde Irán insertados los microprocesadores desde los 486. Obviamente ha sido preciso ir adaptando el formato del zócalo a los requerimientos impuestos por los nuevos microprocesadores (numero de pines, tensión...). Formato LIF y ZIP Con el socket como elemento estándar de comunicación micro-placa, los fabricantes deben diseñar sus placas base para que admitan diferentes rangos de frecuencia de un micro en lugar de diseñarlas para una frecuencia única. Incluso las placas aceptan distintos microprocesadores de diferentes fabricantes. Esta libertad de cambio conlleva también sus problemas. Así, una operación de cambio de microprocesador implica la extracción del micro e inserción del nuevo por presión, mediante mas de una centena de delgados pines. Si dicha operación no se realiza con
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
8
cuidado, se corre el riesgo de dañar el zócalo o, lo que es peor, los pines del microprocesador, inutilizando el sistema. Es preciso simplificar la operación. Con esta finalidad aparecen los zócalos ZIF (Zero Insertion Force) y LIF (Low Insertion Force). Media nte un sencillo sistema mecánico, se consigue liberar los pines del micro para su extracción o inserción y aprisionarlos una vez se encuentra en su correcta ubicación. El mas popular fue el ZIP y se acopló inmediatamente a los diferentes sockets que aparecieron en el mercado. La facilidad de cambio obliga a garantizar la correcta orientación del micro. Con esta finalidad los sockets presentaban pines de inserción asimétricos, omitiendo generalmente uno en una de las esquinas que el procesador presenta roma.
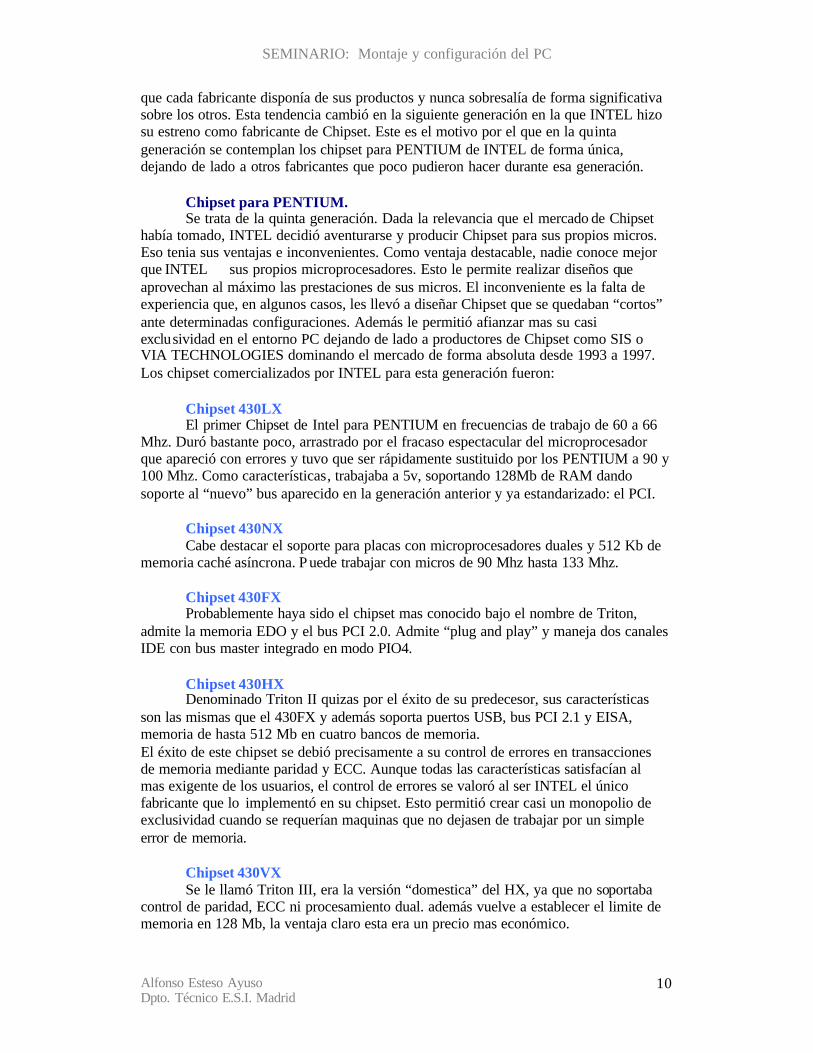
Tabla resumen de los principales sockets: ZOCALO PINES MICROPROCEADORES Socket 1 169 486SX, 486DX, 486DX2, 486DX4, Overdrive Socket 2 238 486SX, 486DX, 486DX2, 486DX4, Overdrive, PENTIUM
Overdrive (63-83) Socket 3 237 486SX, 486DX, 486DX2, 486DX4, AMD 5x86, Cyrix 5x86,
PENTIUM Overdrive (63-83) Socket 4 273 PENTIUM (60-66), PENTIUM Overdrive (120-133) Socket 5 320 PENTIUM (75-133), PENTIUM Overdrive (125-166), PENTIUM
MMX Overdrive (125-166) Socket 7 321 PENTIUM (75-200), PENTIUM MMX, 6x86, K5, K6, 6x86MX Socket 8 387 PENTIUM PRO
Slot 1 242 PENTIUM II, PENTIUM III, K7 Socket 370 370 PENTIUM III Socket 423 423 PENTIUM 4 Socket 478 478 PENTIUM 4
Slot 2 330 PENTIUM II Y III Xeon EL CHIPSET El chipset es una integración de diferentes circuitos periféricos de la placa base. Su función es, en otras, la de gestionar el acceso a los datos así como el proceso de calculo, la gestión de memoria y la coherencia con la memoria caché de segundo nivel.

SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
9
El Chipset, como circuito encargado de mantener toda la lógica del PC que no esta integrada en el microprocesador, se encarga, en todos los casos, de gestionar las siguientes funciones:
- Direccionamiento, decodificación y mapeado de memoria. - Canales de DMA. - Control de la interfaz de teclado (incluyendo el reset por software). - Control de las interrupciones. - Control de los cristales de sincronización (reloj). - Circuito de alimentación del reloj en tiempo real - Control de la memoria principal del sistema En algunos casos, puede encargarse también (dependiendo del modelo) de: - Control de la memoria caché externa - Gestión de las funciones de “turbo”, al nivel lógico - lógica de los estados de esperas programables. - Velocidad del bus.
Los Chipset van asociados por generaciones a los microprocesadores que dan
soporte. De esta forma es fácil asociar prestaciones concretas a los chipset, relacionándolas con los micros. Todo esto es valido para INTEL pero en caso de fabricantes de microprocesadores como AMD o CYRIX hay variaciones. Estos dos productores han ido reali zando micros compatibles con INTEL en cuanto al chipset se refiere hasta llegar a la ultima generación, donde sus microprocesadores trabajan con los chipsets diseñados para la penúltima generación de INTEL.
• Chipset para 486 Se trata de la cuarta generación caracterizada por multitud de novedades y
cambios. Con la aparición de los 80486 se producen importantes cambios y avances en la tecnología de los PC. Si bien por un lado esto es una buena noticia, por otro impidió que hubiese tiempo real para estandarizar un Chipset. Los cambios mas significativos fueron:
- Sustitución de la memoria en formato SIMM de 30 contactos a 72. Hubo placas que soportaban ambos
- Aparición de un nuevo bus: el VESA LOCAL BUS que se implementa junto al popular ISA
- Aparición de otro nuevo bus el PCI. - Evolución de la velocidad del microprocesador desde 25 Mhz hasta 133 Mhz - Cambio en las tensiones de alimentación de los micros, pasando de los
habituales 5v a los 3,3v. - Inclusión de microprocesadores no INTEL potentes que corrían bajo la
arquitectura de placas 486. Tal fue el caso de AMD o CYRIX con sus 5x86.
Por si esto fuera poco, estos cambios se solapaban entre si. Esto explica que Ninguna modelo de Chipset se afianzase en el mercado, ya que era preciso desarrollar nuevos productos constantemente. Se destacaron algunos fabricantes de Chipset como UMC, SIS u OPTI que, si bien ya eran conocidos, se distinguieron por su asombrosa flexibilidad y adaptación a los nuevos cambios. En esta generación no existía ningún monopolio de Chipset sino
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
10
que cada fabricante disponía de sus productos y nunca sobresalía de forma significativa sobre los otros. Esta tendencia cambió en la siguiente generación en la que INTEL hizo su estreno como fabricante de Chipset. Este es el motivo por el que en la quinta generación se contemplan los chipset para PENTIUM de INTEL de forma única, dejando de lado a otros fabricantes que poco pudieron hacer durante esa generación. Chipset para PENTIUM. Se trata de la quinta generación. Dada la relevancia que el mercado de Chipset había tomado, INTEL decidió aventurarse y producir Chipset para sus propios micros. Eso tenia sus ventajas e inconvenientes. Como ventaja destacable, nadie conoce mejor que INTEL sus propios microprocesadores. Esto le permite realizar diseños que aprovechan al máximo las prestaciones de sus micros. El inconveniente es la falta de experiencia que, en algunos casos, les llevó a diseñar Chipset que se quedaban “cortos” ante determinadas configuraciones. Además le permitió afianzar mas su casi exclusividad en el entorno PC dejando de lado a productores de Chipset como SIS o VIA TECHNOLOGIES dominando el mercado de forma absoluta desde 1993 a 1997. Los chipset comercializados por INTEL para esta generación fueron: Chipset 430LX El primer Chipset de Intel para PENTIUM en frecuencias de trabajo de 60 a 66 Mhz. Duró bastante poco, arrastrado por el fracaso espectacular del microprocesador que apareció con errores y tuvo que ser rápidamente sustituido por los PENTIUM a 90 y 100 Mhz. Como características, trabajaba a 5v, soportando 128Mb de RAM dando soporte al “nuevo” bus aparecido en la generación anterior y ya estandarizado: el PCI. Chipset 430NX Cabe destacar el soporte para placas con microprocesadores duales y 512 Kb de memoria caché asíncrona. P uede trabajar con micros de 90 Mhz hasta 133 Mhz. Chipset 430FX Probablemente haya sido el chipset mas conocido bajo el nombre de Triton, admite la memoria EDO y el bus PCI 2.0. Admite “plug and play” y maneja dos canales IDE con bus master integrado en modo PIO4. Chipset 430HX Denominado Triton II quizas por el éxito de su predecesor, sus características son las mismas que el 430FX y además soporta puertos USB, bus PCI 2.1 y EISA, memoria de hasta 512 Mb en cuatro bancos de memoria. El éxito de este chipset se debió precisamente a su control de errores en transacciones de memoria mediante paridad y ECC. Aunque todas las características satisfacían al mas exigente de los usuarios, el control de errores se valoró al ser INTEL el único fabricante que lo implementó en su chipset. Esto permitió crear casi un monopolio de exclusividad cuando se requerían maquinas que no dejasen de trabajar por un simple error de memoria. Chipset 430VX Se le llamó Triton III, era la versión “domestica” del HX, ya que no soportaba control de paridad, ECC ni procesamiento dual. además vuelve a establecer el limite de memoria en 128 Mb, la ventaja claro esta era un precio mas económico.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
11
Chipset 430TX Popularmente recibió el nombre de Triton IV, como sucesión a los chipset anteriores. Soportaba trasferencias de DMA en modo PIO 3. permitía la implementación de mas bancos de memoria (tanto DIMM como SIMM) y volvía a subir el nivel hasta 256 Mb en tres bancos. Chipset para PENTIUM PRO y PENTIUM II La “sexta generación” se formó, en el caso de los chipset, por aquellos que han dado soporte para PENTIUM PRO/II. INTEL siguió liderando el mercado y destacándose al incorporar características que se apartaron del estándar. Tal fue el caso del Slot 1 con el que INTEL distingue sus productos y se separa del estándar empleado durante años, el popular “socket”. Tanto AMD como CYRIX, siguieron usando el socket 7 hasta la aparición de la serie K/ de AMD, con microprocesadores diseñados para el slot 1. Chipset 440FX Fue usado en la mayor parte de las placas base para Pentium Pro, incluso, en los primeros Pentium II. Es muy similar al 430HX y realmente no aporto grandes ventajas, limitándose a ser un puente hacia el 440LX. Soportaba memoria EDO RAM así como 2 microprocesadores. Era capaz también de manejar hasta 1 Gb de memoria repartida en 8 bancos e incluía manejo de puerto USB. Chipset 440LX Diseñado exclusivamente para Pentium II aprovechando todas sus ventajas. Fue el primer chipset en soportar puertos AGP 2x para video. Incluía características adicionales como manejo de USB, soporte Ultra DMA para discos duros y era capaz de manejar SDRAM (hasta 512 Mb) y EDO RAM (hasta 1 Gb). Controlando también 4 ranuras PCI 2.1 Chipset 440EX De bajo coste, orientado a los Pentium _Celeron. Sus prestaciones eran mas pobres, soportando un único microprocesador y 256 Mb de memoria RAM. Admite tanto memoria EDO (4 SIMM) como SDRAM (2 DIMM) y AGP 2x. Chipset 450NX Diseñado para el Pentium XEON, establece el limite de memoria en 8 Gb que pueden ser tanto EDO como SDRAM. Por supuesto, aguanta el procesamiento dual. Chipset 810 Se trata del primer chipset de una nueva generación de INTEL. Apareció en abril del año 99 y soportaba 512 Mb de SDRAM. Lleva implementado controladores para audio y rutinas especificas para el manejo de módems. Una de las características que mas llama la atención es la falta de soporte para los buses ISA, lo que hacia prever la desaparición de este tipo de bus. Estaba compuesto de tres integrados: 82810, 82801 y 82802. Por supuesto soporta un puerto AGP e incluye software para el manejo de video en formato DVD. Este chipset soporta buses de 100 Mhz. Chipset para PENTIUM III Chipset i820
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
12
Apareció en septiembre del 99 tras varios aplazamientos pro problemas, fundamentalmente debidos al manejo de la memoria Rambus, aunque también presentó errores con las placas con mas de dos bancos de SDRAM. Se trata de uno de los peores chpset de la factoría INTEL. Constaba de dos integrados, el 82820 que era un controlador de memoria y aportaba el manejo de las interfaces de memoria DRAM y las de AGP. Y el 82801 que era un controlador de puertos y dispositivos de entrada/salida en general. Soporte dual de puertos USB, controladora ATA66 y manejo del bus PCI. Solo funciona de forma correcta con RDRAM aunque INTEL tenia intenciones de que soportase también memoria SDRAM. Chipset i820E Es una variación sobre el i820 que aparece en junio de 2000. Esta nueva versión del chip aporta nuevas ventajas que no son suficientes para cubrir los fallos y defectos de la primera versión. Cabe destacar el soporte de cuatro puertos USB, controladora especifica para Ultra ATA100 IDE y capacidades de sonido avanzadas como el soporte de 6 canales de audio y manejo de sonido Dolby surround. No varía el controlador de memoria RDRAM con respecto al 820 original, lo que limita el numero de módulos de memoria RIMM a dos. Chipset i815E Es uno de los mejores que ha fabricado INTEL. Presentado en junio del 2000, lo cierto es que no podía ser de otro modo, en cuanto a calidad y prestaciones se refiere, tras el fracaso de los 820. Soporte de la memoria PC133. Un nuevo adaptador grafico proporciona un gran numero de aplicaciones nuevas. De hecho, su éxito se debe a que se ha seleccionado cuidadosamente parte del diseño del i810 y del i820, ofreciendo las mejores prestaciones de ambos. Chipset i850 Diseñado para trabajar con el PENTIUM 4, Trabaja con un bus de sistema de 400 Mhz eliminando cuellos de botella con el micro y la memoria ,y con la moderna memoria DRDRAM soportando hasta 3,2 Gb, lo que hace que las placas que lo incorporen sean bastante caras y los modulos de memoria tambien pero ofreciendo grandes prestaciones, trabaja con dos controladores de USB, AGP 4x, y a petición del Sistema Operativo puede hacer que le altavoz interno emita una señal de alarma cuando alguna instrucción del sistema falla. Chipset i845 El chipset Intel 845 está diseñado, validado y optimizado para el procesador PENTIUM 4 utilizando la tecnología de memoria PC133 SDRAM de alto volumen. Las plataformas basadas en el chipset Intel 845 que utilizan la tecnología de memoria PC133 SDRAM, extienden las capacidades del procesador Pentium 4 a los segmentos de mercado del PC de volumen, consta de dos hubs de controlador conectados entre sí a través de la arquitectura de hub de alto ancho de banda de Intel. El hub de controlador de memoria (MCH) 82845 soporta un bus de sistema a 400 MHz proporcionando una
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
13
conexión de alto ancho de banda entre el procesador Pentium 4 y el resto de la plataforma, lo que ofrece tres veces el ancho de banda del bus de sistema de las plataformas basadas en los procesadores Intel Pentium III. Están también incluidas en el MCH innovadoras mejoras de arquitectura como los mayores caminos de datos, una caché de escritura y una tecnología de refresco de memoria flexible para permitir prestaciones PC133 SDRAM óptimas y los últimos dispositivos gráficos a través del interfaz 1.5V AGP4x que permite 1 GB/s de ancho de banda de gráficos. BIOS Esta claro que el PC ejecuta los comandos que habitualmente se encuentran en la memoria. Ahora bien, nada mas arrancar el ordenador, la memoria no contiene aun ningún tipo de software y es la BIOS quien asume las funciones “de dirección” del PC. De esta forma, el microprocesador acudirá a una dirección estándar entre los fabricantes de BIOS para encontrar el “inicio” de dicha BIOS. Normalmente se entiende que hay una única BIOS para controlar el sistema pero es habitual que determinados componentes (tarjeta de video, discos duros, etc.) también tengan su propia BIOS. Secuencia de actuación de la Bios. Es la BIOS quien controla la secuencia de arranque del ordenador. Cada vez que se enciende la maquina se realizan una serie de operaciones. Esto es lo que se llama un “arranque en frío”. Si el reinicio se hace mediante la pulsación de Ctrl+Alt+Supr se realiza un “arranque en caliente”, produciéndose el mismo proceso descrito a continuación pero comenzando desde el tercer punto:
1. Tras conectar el PC, se produce la estabilización de la tensión. Finalizando el proceso cuando la señal de power good aparece. Durante este tiempo el microprocesador está e estado de espera gracias a una señal de reseteo generada por el Chipset (igual a la producida por el botón de reset). Una vez habilitado el micro, accede a la dirección FFFF0h donde se encuentra el inicio del programa de ejecución de la ROM BIOS.
2. Tomado el control por la BIOS, ejecuta el POST o Test de autochequeo (“power on self test”), evaluando la BIOS de la tarjeta de video y arrancando el sistema de video, si todo es correcto. Si se produce algún error en el POST detendrá el proceso y generará mensajes acústicos. Si el proceso continua, se evaluaran el resto de los dispositivos.
3. Pasadas estas comprobaciones se habilitara el monitor, mostrando el conteo de memoria del sistema y se realizara un “inventario” de los componentes del PC para habilitar un chequeo por cada uno de los dispositivos instalados. Es ahora también cuando se inicia el proceso de “plug and play” mostrando en pantalla todos los elementos encontrados.
4. Lega el momento de encontrar una unidad de arranque de sistema operativo, según la secuencia definida en la propia BIOS. Por defecto esta búsqueda comenzara en la unidad A:, pasara por el disco duro y posteriormente al resto de unidades de sistema, aunque este orden se puede cambiar en el Setup de la BIOS.
5. Cuando encuentra una unidad se accede a una ubicación física concreta donde se encuentra el sector de arranque: cilindro 0, cabeza 0 y sector 1. Si este sector está preparado con las rutinas del sistema operativo oportunas, el sistema arrancará, en caso contrario se continuara la búsqueda con el resto de las unidades.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
14
6. En caso de evaluar todas las unidades y no encontrar el arranque del sistema operativo, aparecerá un error en pantalla indicativo del problema.
SLOTS
Los slots o ranuras de expansión son aquellas donde se insertarán las distintas tarjetas que conforman el PC. Aunque no existe una normativa, las ranuras ISA suelen ser blancas o negras (casi siempre negras), las VESA marrones y las PCI blancas. El numero de ranuras depende del tipo de placa base y arquitectura que soporte. Lo habitual es disponer de buses ISA, ISA -VESA, o ISA-PCI. Existen algunas placas que recibían el nombre de VIP (VESA-ISA -PCI) que proporcionaban los tres tipos de arquitectura para microprocesadores 486. Desde PENTIUM en cualquiera de sus variaciones, la constitución de los buses se realiza ISA y PCI. BUSES Se entiende por bus el camino o canal por donde se enviaran o recibirán señales mas de dos dispositivos internos del ordenador. Estas señales pueden corresponder a datos, instrucciones o direcciones y, de forma habitual, se usan los tres tipos para completar una operación. Por ejemplo, para escribir una información en memoria será preciso direccional a que celda se desea enviar la información (bus de direcciones), dar la orden de escritura (bus de control) y enviar los datos (bus de datos). La diferencia ortodoxa entre un bus y un puerto es que el bus comunica varios dispositivos mientras que un puerto solo dos. Bus XT Totalmente obsoleto en nuestros días es muy similar al ISA hasta tal punto que determinadas tarjetas XT pueden trabajar en buses ISA. Posee 8 bits de datos y 20 bits de direccionamiento y trabaja de modo sincrono. Este bus apareció en 1980 con el primer PC de IBM, funcionando a la misma velocidad que los procesadores de INTEL de la época (8088 a 4,77 Mhz). La aparición del microprocesador 8086 con un bus de datos de 16 bits dejó fuera de funcionamiento el bus XT. De hecho es aquí cuando se comienza a hablar de los populares “cuellos de botella” que se mantienen, en algunas configuraciones, hasta nuestros días. Fruto de la evolución en función de las necesidades impuestas por los nuevos microprocesadores de INTEL, aparece el bus AT o ISA cuya principal diferencia estriba en que es asíncrono.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
15
Bus ISA. Es muy usado a pesar del tiempo que lleva existiendo. Funciona con buses de 8 y 16 bits de datos y 24 bits de direccionamiento lo cual supone una limitación para los PCS actuales. Su velocidad inicial era de 4,77 Mhz y posteriormente se amplió a 6, 8 y 10 Mhz. Su nombre proviene de “Industry Standard Architecture” y apareció en 1980. Durante 10 años funciono con 8 bits. Cuando apareció en el formato 16 bits, se mantuvo intacto el formato anterior para mayor compatibilidad. Es barato e indicado para tarjetas con necesidades de rendimiento medio o bajo de ancho de banda. Su capacidad de transmisión máxima se sitúa en 16 MB/seg. Probablemente el éxito de este bus sea su compatibilidad. Aun hoy con las modernas maquinas se sigue usando, y aunque la tendencia es “migrar” todo a los buses PCI, sin duda queda mucho tiempo antes de que el ISA desaparezca.
Bus EISA El “Extended Industry Standard Architecture” es una respuesta al bus MCA de
IBM. Trabaja con 32 bits de datos, otros 32 de direccionamiento y su velocidad llega hasta 8,33 Mhz. Aunque no ha sido muy difundido, por su elevado precio, en un principio se utilizó en sistemas industriales.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
16
Es una extensión del ISA y se creo ante las limitaciones del ISA y el monopolio que IBM pretendía crear con el MCA. La gran ventaja de este bus es la posibilidad de realizar intercambios de información entere periféricos sin intervención de la CPU (“bus mastering”). La velocidad, por compatibilidad con el ISA seguía siendo de 8 Mhz aunque la velocidad de transferencia llega a 33 Mb frente a los 20 del ISA. El rendimiento final evaluado frente al elevado precio no lo hace una opción demasiado recomendable.
Bus MCA También conocido por micro canal o “Micro Chanel Arquitecture” fue
desarrollado por IBM y presentó la ventaja de ser autoconfigurable, aunque incompatible con todas las demás. No tuvo demasiado éxito fuera del entorno IBM. Soportaba bus master y desde que apareció, se estableció una competencia directa con el bus EISA. Este ultimo resulto “vencedor” aunque el único que prevalece es el ISA.
Bus VESA El Vesa Local Bus fue en principio el mas popular y se diseñó especialmente
para el microprocesador 486, aunque existieron variaciones para el 386. Este bus fue diseñado por la “vides Electronics Association”, consorcio creado a finales de los 80 con la idea de promover hardware relacionado con el video. Puesto que el flujo de datos generados por el video es uno de los problemas, la VESA decide dar una solución.
El conector es que se estandarizó con IBM: el MCA de 62 terminales. No
obstante y para asegurar la compatibilidad, el VLB está formado por un bus ISA de 16 bits seguido en “línea” del conector MCA. Todo el conjunto conforma el VLB, aunque puede ser usada de forma independiente la parte de bus ISA. Este bus es ampliado a 64 bits para su uso con PENTIUM mediante un doble conector (aunque no tuvo demasiada aceptación).
Soporta 3 ranuras de 32 bits y solo dos funcionando a la vez y en su formato
convencional usa 32 bits para datos y 32 para direccionamiento, con un rango de frecuencias de trabajo entre 25 y 40 Mhz. Soporta bus master y puede coexistir con el ISA y EISA.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
17
Bus PCI El “Peripherical Components Interconnection” o PCI fue desarrollado por
INTEL desde su aparición en 1993, lo que le aseguró la supervivencia frente al VESA. Sus prestaciones son ligeramente inferiores en algunos aspectos al VESA, ya que debe multiplexar direcciones y datos para reducir el numero de terminales a 47. Existe una ampliación de este bus a 64 bits para PENTIUM tanto para datos como para direccionamiento, aunque en su formato original trabaja con 32 bits en ambos casos. Este tipo de bus soporta hasta 10 periféricos, aunque es raro encontrar una placa que integre mas de 3 o cuatro ranuras, y puede funcionar de forma sincronía o asíncrona con el microprocesador dependiendo del chipset. Es autoconfigurable, soporta bus master y puede coexistir con buses ISA/EISA/MCA.
Todas las ranuras PCI se conectan de forma indirecta a la CPU mediante una
circuitería encargada de tal fin y, en el caso del VESA la comunicación es directa con el microprocesador a través de un bus indirecto.
El acuerdo entre INTEL como fabricante de la tecnología PCI y MICROSOFT
dio pie a las primeras versiones fiables de “Plug & Play”, incorporando el Chipset PCI circuitería especifica para la identificación de tarjetas.
Bus AGP. “Advanced Graphics Port”, “puerto” pues se comunica con el microprocesador de una forma más “intima” que los otros buses, Avanzado pues usa una tecnología mas avanzada y gráficos ya que ha sido diseñado para ese uso exclusivamente. El objetivo al crear este bus era conseguir una tasa de transferencia de datos-tarjeta grafica superior a la del PCI, ya que esta tasa era valida para aplicaciones 2D pero no así para 3D. Tipos de AGP:
- AGP 1x: con buses de 32 bits y a 66 Mhz, su tasa máxima era de 264 Mb/seg - AGP 2x: modo con bus 32 bits y a 66 Mhz reales, o 133 “virtuales” gracias a la comunicación bidireccional simultánea. Su tasa máxima es de 528 Mb/seg - AGP 3x: 32 bits a 100 Mhz, tasas de 800 Mb/seg
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
18
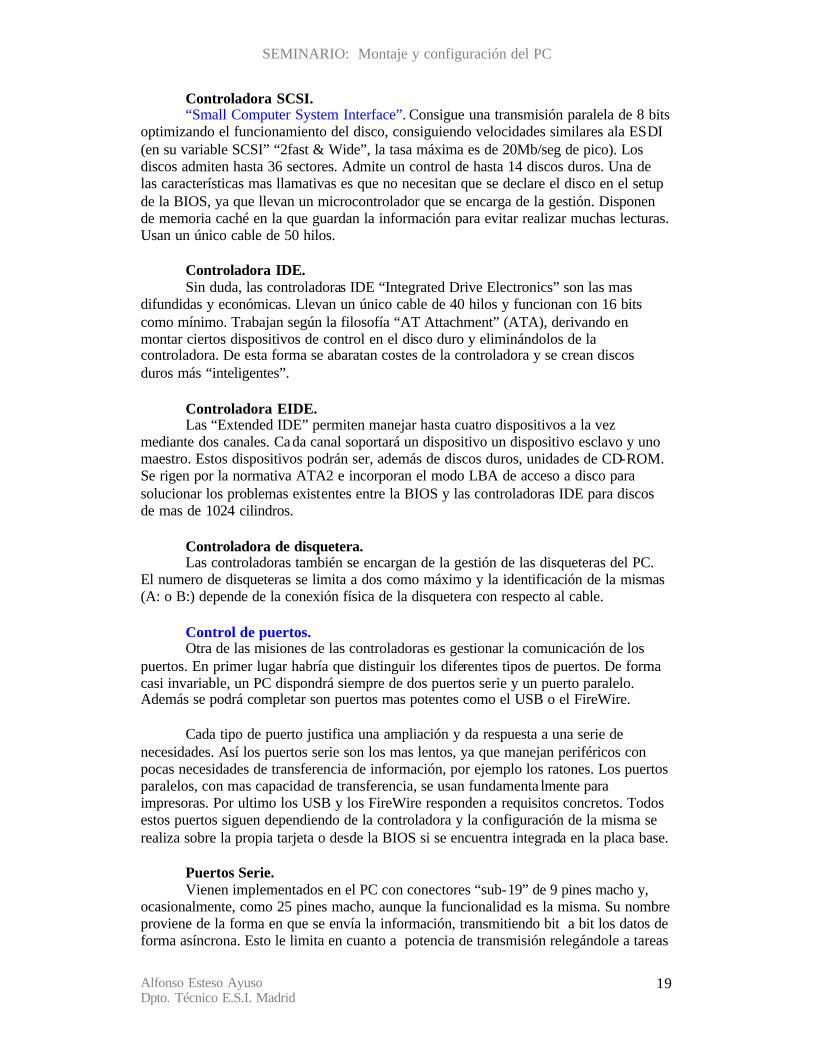
Comparativa: DATOS (Bits) VELOCIDAD
(Mhz) Transferencia
(Mb/seg) ISA (8 bits) 8 8,3 7,9
ISA (16 bits) 16 8,3 15,9 EISA 32 8,3 31,8 MCA 32 10 38,1 VLB 32 33 127,2
PCI (32 bits) 32 33 127,2 PCI (64 bits) 64 66 508,6
AGP 32 66 / 100 800 CONTROLADORAS MULTI I/O Se trata de la tarjeta encargada de gestionar las comunicaciones entre el PC,
dispositivos como discos duros o CD-ROM, disqueteras y puertos. Antiguamente se trataba de una tarjeta individual, y aunque se pueden encontrar todavía en el mercado lo habitual es que vengan integradas en la placa.
Control de discos duros y unidades CD-ROM Controladora MFM. “Modified Frequency Modulation”. Es la mas antigua y muy fácil de reconocer
debido a que usa dos conectores (aparte de la alimentación): uno de control de 34 hilos y otro de datos de 20.
Controladora RLL “Run Lenght Limited”. Son prácticamente iguales a las MFM pero permitían
manejar discos más grandes Contorladora ESDI “Enhaced Small Device Interface”. Su baja difusión fue debida a su elevado
precio. Básicamente se diferencia de otras en que no codifica los datos sino que los trasporta directamente. Esto consigue un aumento de velocidad considerable llegando a aumentar el rendimiento hasta un 300%.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
19
Controladora SCSI. “Small Computer System Interface”. Consigue una transmisión paralela de 8 bits
optimizando el funcionamiento del disco, consiguiendo velocidades similares ala ESDI (en su variable SCSI” “2fast & Wide”, la tasa máxima es de 20Mb/seg de pico). Los discos admiten hasta 36 sectores. Admite un control de hasta 14 discos duros. Una de las características mas llamativas es que no necesitan que se declare el disco en el setup de la BIOS, ya que llevan un microcontrolador que se encarga de la gestión. Disponen de memoria caché en la que guardan la información para evitar realizar muchas lecturas. Usan un único cable de 50 hilos.
Controladora IDE. Sin duda, las controladoras IDE “Integrated Drive Electronics” son las mas
difundidas y económicas. Llevan un único cable de 40 hilos y funcionan con 16 bits como mínimo. Trabajan según la filosofía “AT Attachment” (ATA), derivando en montar ciertos dispositivos de control en el disco duro y eliminándolos de la controladora. De esta forma se abaratan costes de la controladora y se crean discos duros más “inteligentes”.
Controladora EIDE. Las “Extended IDE” permiten manejar hasta cuatro dispositivos a la vez
mediante dos canales. Cada canal soportará un dispositivo un dispositivo esclavo y uno maestro. Estos dispositivos podrán ser, además de discos duros, unidades de CD-ROM. Se rigen por la normativa ATA2 e incorporan el modo LBA de acceso a disco para solucionar los problemas existentes entre la BIOS y las controladoras IDE para discos de mas de 1024 cilindros.
Controladora de disquetera. Las controladoras también se encargan de la gestión de las disqueteras del PC.
El numero de disqueteras se limita a dos como máximo y la identificación de la mismas (A: o B:) depende de la conexión física de la disquetera con respecto al cable.
Control de puertos. Otra de las misiones de las controladoras es gestionar la comunicación de los puertos. En primer lugar habría que distinguir los diferentes tipos de puertos. De forma casi invariable, un PC dispondrá siempre de dos puertos serie y un puerto paralelo. Además se podrá completar son puertos mas potentes como el USB o el FireWire. Cada tipo de puerto justifica una ampliación y da respuesta a una serie de necesidades. Así los puertos serie son los mas lentos, ya que manejan periféricos con pocas necesidades de transferencia de información, por ejemplo los ratones. Los puertos paralelos, con mas capacidad de transferencia, se usan fundamenta lmente para impresoras. Por ultimo los USB y los FireWire responden a requisitos concretos. Todos estos puertos siguen dependiendo de la controladora y la configuración de la misma se realiza sobre la propia tarjeta o desde la BIOS si se encuentra integrada en la placa base. Puertos Serie. Vienen implementados en el PC con conectores “sub-19” de 9 pines macho y, ocasionalmente, como 25 pines macho, aunque la funcionalidad es la misma. Su nombre proviene de la forma en que se envía la información, transmitiendo bit a bit los datos de forma asíncrona. Esto le limita en cuanto a potencia de transmisión relegándole a tareas

SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
20
con pocas necesidades de transferencia. De forma habitual, se suele usar casi de forma única para manejar el ratón. El sistema operativo lo identifica como COMx donde x corresponde al numero de puerto serie al que corresponde. Control de la Transmisión: la UART. Quien controla las comunicaciones es un integrado llamado UART “Universal Asynchronus Receiver Trasmmiter”. Sus principales funciones son:
• Manejo de las interrupciones de los dispositivos conectados al puerto • Conversión de datos paralelo a serie para poder transmitir información • Conversión de datos serie a paralelo para poder recibir información • Añadir los delimitadores de trama a la hora de enviar datos
Dispone de una estructura FIFO que hace las veces de un búfer capaz de
mantener los datos mientras la CPU se prepara para borrarlos o, por ejemplo, mientras el puerto serie se prepara para transmitirlos. Es frecuente que los propios sistemas operativos gestionen de forma especifica la UART para aumentar el rendimiento de el sistema. Es por tanto la UART quien define en gran medida las características del puerto serie.
Tipos de UART UART 8250 Se trata de una UART sin búfer. Es la mas antigua y, por tanto, la menos
potente. Se comenzó a implementar con los primeros ordenadores XT y tenia tendencia a generar errores, motivo por el cual desapareció del mercado. Es una UART bastante lenta.
UART 16450 Fue la evolución de las UARTs 8250 a las arquitecturas AT. Mucho mas rápida
corría sobre los mismos buses que su predecesora llegando a ser valida incluso para las velocidades actuales. Tampoco disponía de búfer.
UART 16550 Lo único a resaltar de este modelo es la inclusión de un pequeño búfer interno de
16 bytes. Tuvo muy corta duración en el mercado dado que el búfer no funcionaba correctamente. A partir de esta UART se desarrolló la 16550A, una versión mejorada sin problemas de búfer que se ha considerado el modelo estándar de la década de los 90. Sobre este chip ha y diferentes modalidades y es la primera UART con consideración de búfer operativo.
UART 16750 Es un diseño totalmente compatible con el 16550A desarrollado por TEXAS
INSTRUMENT, que añade un búfer de 64 bytes además de la capacidad de control de flujo automático.
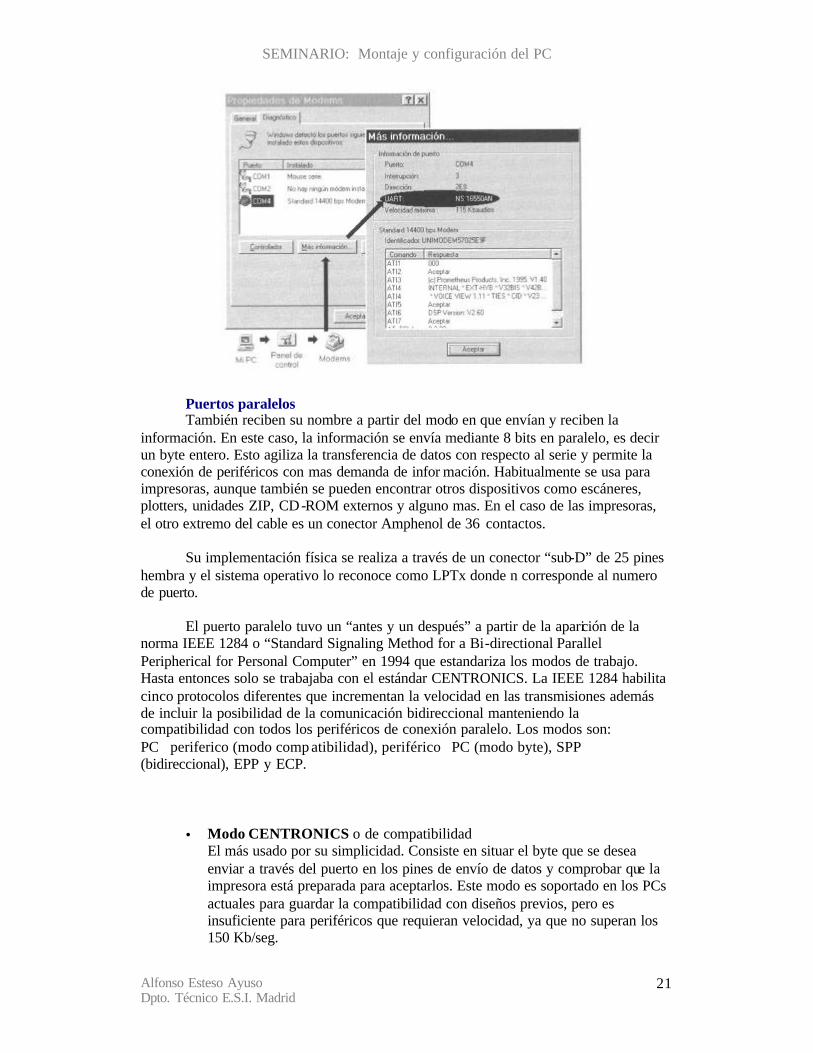
Es fácil saber que UART se tiene instalada si se dispone de un MODEM y de
Windows: Mi PC/ Panel de Control/ Modems/ Diagnostico/ Mas información
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
21
Puertos paralelos También reciben su nombre a partir del modo en que envían y reciben la información. En este caso, la información se envía mediante 8 bits en paralelo, es decir un byte entero. Esto agiliza la transferencia de datos con respecto al serie y permite la conexión de periféricos con mas demanda de infor mación. Habitualmente se usa para impresoras, aunque también se pueden encontrar otros dispositivos como escáneres, plotters, unidades ZIP, CD-ROM externos y alguno mas. En el caso de las impresoras, el otro extremo del cable es un conector Amphenol de 36 contactos. Su implementación física se realiza a través de un conector “sub-D” de 25 pines hembra y el sistema operativo lo reconoce como LPTx donde n corresponde al numero de puerto. El puerto paralelo tuvo un “antes y un después” a partir de la aparición de la norma IEEE 1284 o “Standard Signaling Method for a Bi-directional Parallel Peripherical for Personal Computer” en 1994 que estandariza los modos de trabajo. Hasta entonces solo se trabajaba con el estándar CENTRONICS. La IEEE 1284 habilita cinco protocolos diferentes que incrementan la velocidad en las transmisiones además de incluir la posibilidad de la comunicación bidireccional manteniendo la compatibilidad con todos los periféricos de conexión paralelo. Los modos son: PC�periferico (modo comp atibilidad), periférico�PC (modo byte), SPP (bidireccional), EPP y ECP.
• Modo CENTRONICS o de compatibilidad El más usado por su simplicidad. Consiste en situar el byte que se desea enviar a través del puerto en los pines de envío de datos y comprobar que la impresora está preparada para aceptarlos. Este modo es soportado en los PCs actuales para guardar la compatibilidad con diseños previos, pero es insuficiente para periféricos que requieran velocidad, ya que no superan los 150 Kb/seg.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
22
• Modo BYTE La nove dad de este modo es habilitar el puerto como lector de entradas, gracias a la inhabilitación de controladores para manejar el puerto, permitiendo así que un periférico pueda enviar un byte de información al puerto usando las 8 líneas de datos.
• Modo EPP Es una variación orientada a suplir las carencias de velocidad existentes en otros modos. La implementación del modo EPP implica un protocolo con dos ciclos de transferencia que se subdividen en cuatro: datos 8lectura y escritura) desde y hacia el PC, y direcciones (lectura y escritura) de canales comandos e información de control. La transferencia de datos en el protocolo EPP se da en un ciclo ISA de entrada/salida, consiguiendo incrementar las tasas de envío da datos desde 500 Kb hasta 2 Mb por segundo.
• Modo ECP El protocolo ECP o puerto de capacidad extendida fue promovido por HP y MICROSOFT, encaminado a aumentar los rendimientos de transmisión y crear un sistema avanzado de comunicación con periféricos externos. Diseñado sobre todo para dar soporte a impresoras, escáneres y otros periféricos con volumen relativo de datos, el ECP usa una compresión de datos que llega a conseguir reducciones de 64:1 en tiempo real.
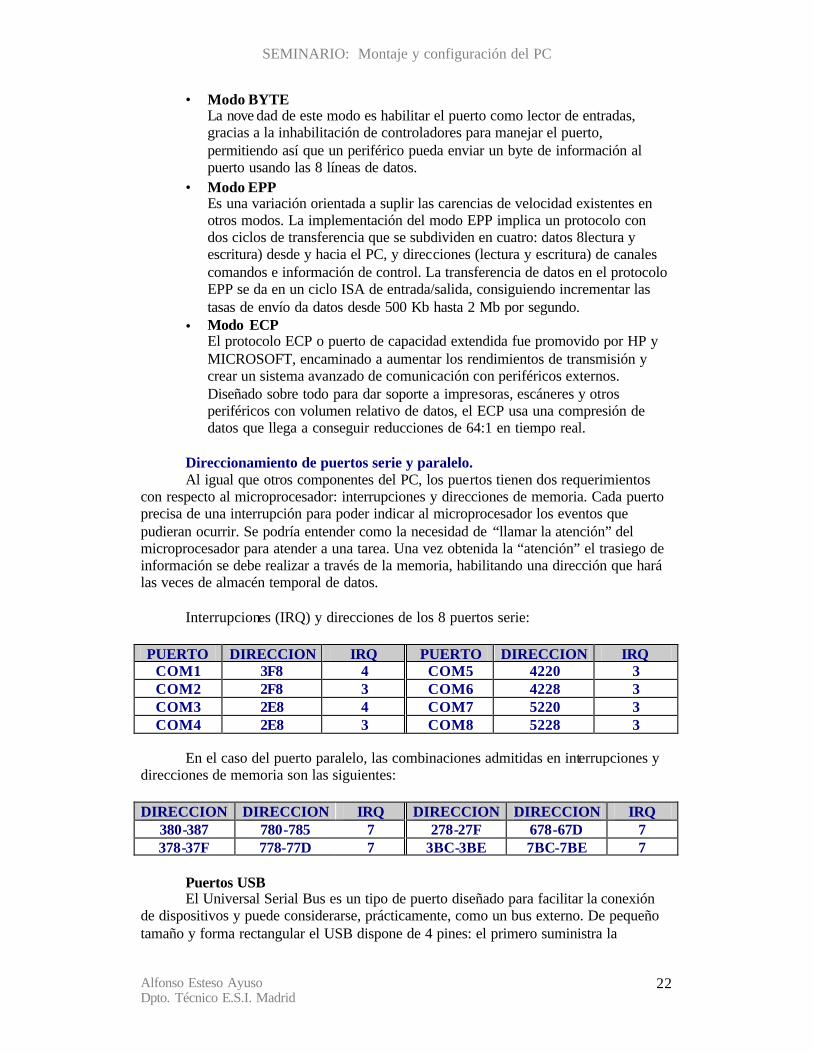
Direccionamiento de puertos serie y paralelo. Al igual que otros componentes del PC, los puertos tienen dos requerimientos con respecto al microprocesador: interrupciones y direcciones de memoria. Cada puerto precisa de una interrupción para poder indicar al microprocesador los eventos que pudieran ocurrir. Se podría entender como la necesidad de “llamar la atención” del microprocesador para atender a una tarea. Una vez obtenida la “atención” el trasiego de información se debe realizar a través de la memoria, habilitando una dirección que hará las veces de almacén temporal de datos.
Interrupciones (IRQ) y direcciones de los 8 puertos serie: PUERTO DIRECCION IRQ PUERTO DIRECCION IRQ
COM1 3F8 4 COM5 4220 3 COM2 2F8 3 COM6 4228 3 COM3 2E8 4 COM7 5220 3 COM4 2E8 3 COM8 5228 3
En el caso del puerto paralelo, las combinaciones admitidas en interrupciones y direcciones de memoria son las siguientes: DIRECCION DIRECCION IRQ DIRECCION DIRECCION IRQ
380-387 780-785 7 278-27F 678-67D 7 378-37F 778-77D 7 3BC-3BE 7BC-7BE 7
Puertos USB El Universal Serial Bus es un tipo de puerto diseñado para facilitar la conexión de dispositivos y puede considerarse, prácticamente, como un bus externo. De pequeño tamaño y forma rectangular el USB dispone de 4 pines: el primero suministra la
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
23
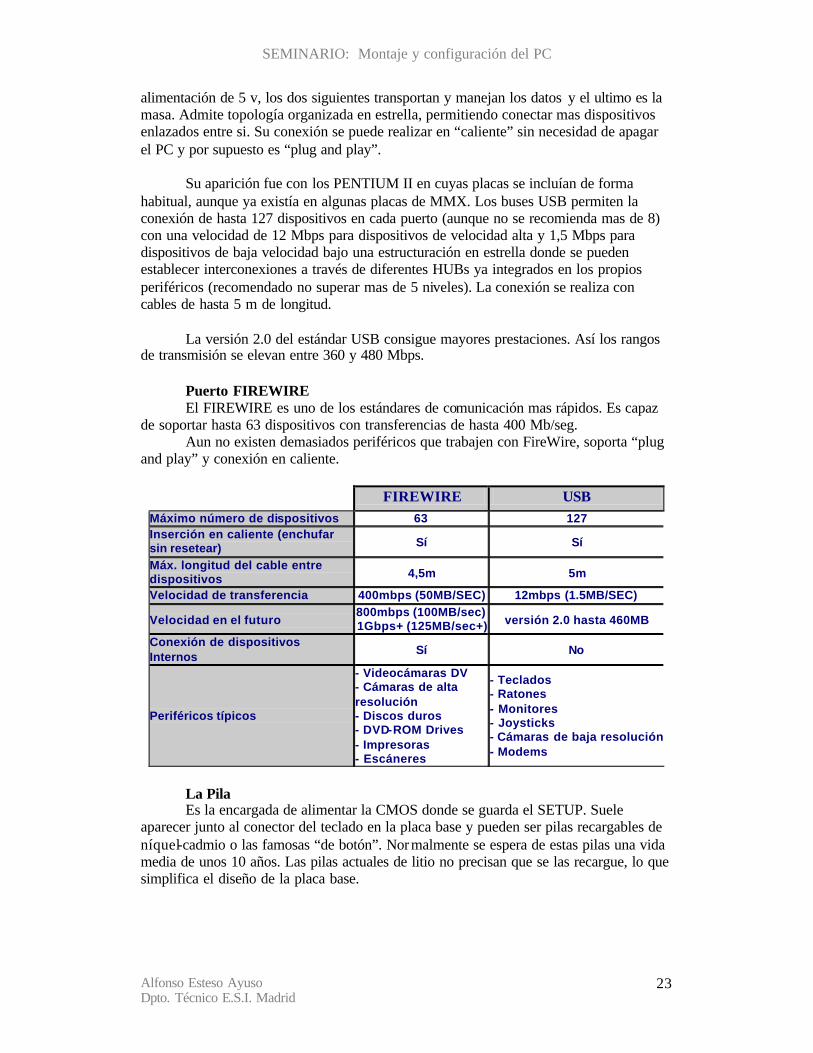
alimentación de 5 v, los dos siguientes transportan y manejan los datos y el ultimo es la masa. Admite topología organizada en estrella, permitiendo conectar mas dispositivos enlazados entre si. Su conexión se puede realizar en “caliente” sin necesidad de apagar el PC y por supuesto es “plug and play”. Su aparición fue con los PENTIUM II en cuyas placas se incluían de forma habitual, aunque ya existía en algunas placas de MMX. Los buses USB permiten la conexión de hasta 127 dispositivos en cada puerto (aunque no se recomienda mas de 8) con una velocidad de 12 Mbps para dispositivos de velocidad alta y 1,5 Mbps para dispositivos de baja velocidad bajo una estructuración en estrella donde se pueden establecer interconexiones a través de diferentes HUBs ya integrados en los propios periféricos (recomendado no superar mas de 5 niveles). La conexión se realiza con cables de hasta 5 m de longitud. La versión 2.0 del estándar USB consigue mayores prestaciones. Así los rangos de transmisión se elevan entre 360 y 480 Mbps. Puerto FIREWIRE El FIREWIRE es uno de los estándares de comunicación mas rápidos. Es capaz de soportar hasta 63 dispositivos con transferencias de hasta 400 Mb/seg. Aun no existen demasiados periféricos que trabajen con FireWire, soporta “plug and play” y conexión en caliente.
FIREWIRE USB Máximo número de dispositivos 63 127 Inserción en caliente (enchufar sin resetear) Sí Sí
Máx. longitud del cable entre dispositivos 4,5m 5m
Velocidad de transferencia 400mbps (50MB/SEC) 12mbps (1.5MB/SEC)
Velocidad en el futuro 800mbps (100MB/sec) 1Gbps+ (125MB/sec+) versión 2.0 hasta 460MB
Conexión de dispositivos Internos Sí No
Periféricos típicos
- Videocámaras DV - Cámaras de alta resolución - Discos duros - DVD-ROM Drives - Impresoras - Escáneres
- Teclados - Ratones - Monitores - Joysticks - Cámaras de baja resolución - Modems
La Pila Es la encargada de alimentar la CMOS donde se guarda el SETUP. Suele aparecer junto al conector del teclado en la placa base y pueden ser pilas recargables de níquel-cadmio o las famosas “de botón”. Normalmente se espera de estas pilas una vida media de unos 10 años. Las pilas actuales de litio no precisan que se las recargue, lo que simplifica el diseño de la placa base.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
24
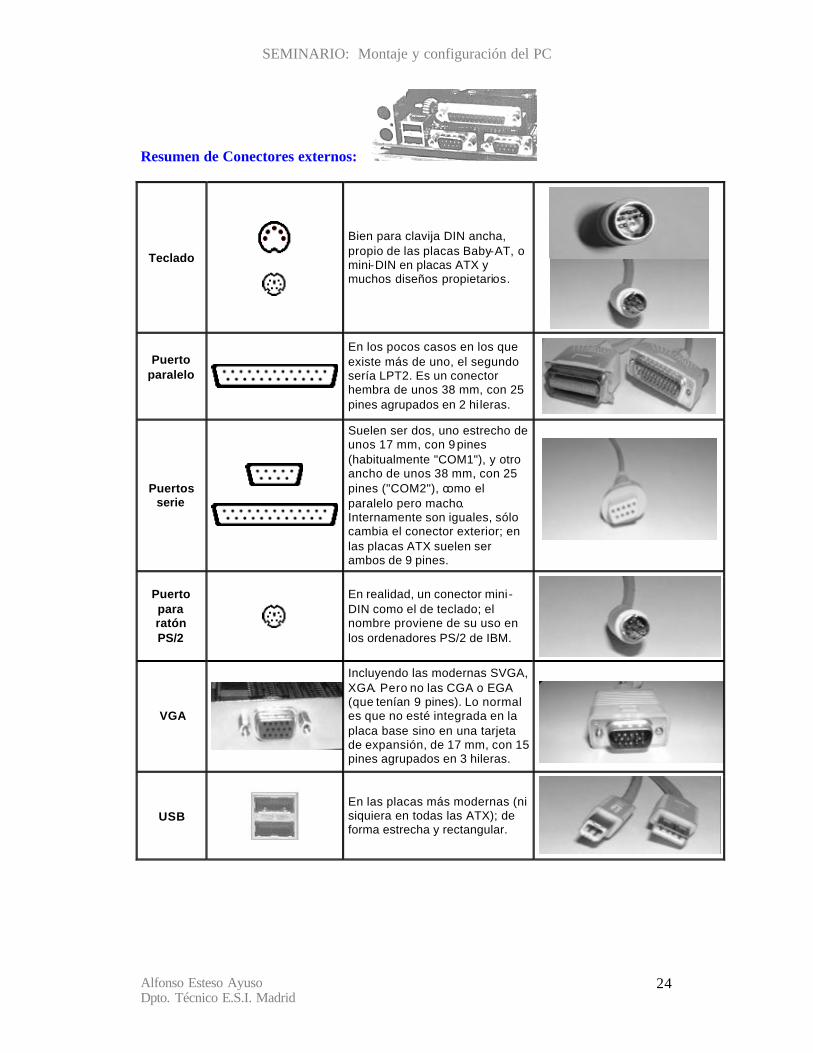
Resumen de Conectores externos:
Teclado
Bien para clavija DIN ancha, propio de las placas Baby-AT, o mini-DIN en placas ATX y muchos diseños propietarios.
Puerto paralelo
En los pocos casos en los que existe más de uno, el segundo sería LPT2. Es un conector hembra de unos 38 mm, con 25 pines agrupados en 2 hi leras.
Puertos serie
Suelen ser dos, uno estrecho de unos 17 mm, con 9 pines (habitualmente "COM1"), y otro ancho de unos 38 mm, con 25 pines ("COM2"), como el paralelo pero macho. Internamente son iguales, sólo cambia el conector exterior; en las placas ATX suelen ser ambos de 9 pines.
Puerto para ratón PS/2
En realidad, un conector mini -DIN como el de teclado; el nombre proviene de su uso en los ordenadores PS/2 de IBM.
VGA
Incluyendo las modernas SVGA, XGA. Pero no las CGA o EGA (que tenían 9 pines). Lo normal es que no esté integrada en la placa base sino en una tarjeta de expansión, de 17 mm, con 15 pines agrupados en 3 hileras.
USB
En las placas más modernas (ni siquiera en todas las ATX); de forma estrecha y rectangular.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
25
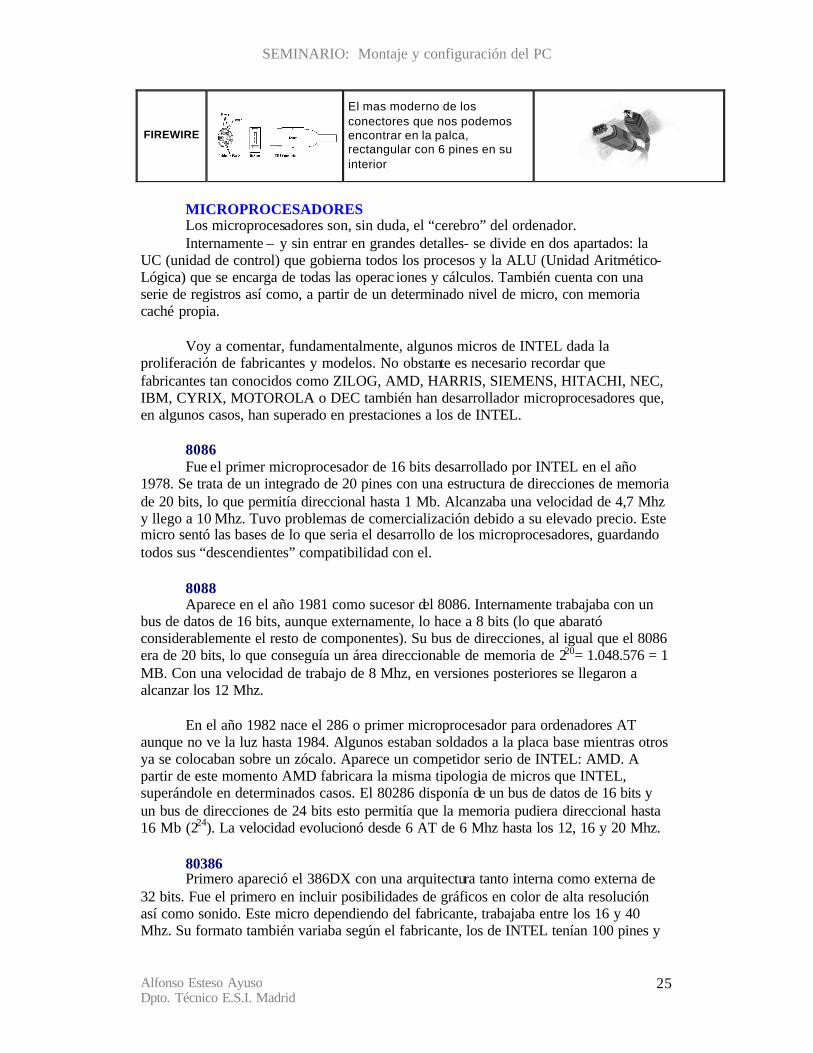
FIREWIRE
El mas moderno de los conectores que nos podemos encontrar en la palca, rectangular con 6 pines en su interior
MICROPROCESADORES Los microprocesadores son, sin duda, el “cerebro” del ordenador. Internamente – y sin entrar en grandes detalles- se divide en dos apartados: la UC (unidad de control) que gobierna todos los procesos y la ALU (Unidad Aritmético-Lógica) que se encarga de todas las operac iones y cálculos. También cuenta con una serie de registros así como, a partir de un determinado nivel de micro, con memoria caché propia. Voy a comentar, fundamentalmente, algunos micros de INTEL dada la proliferación de fabricantes y modelos. No obstante es necesario recordar que fabricantes tan conocidos como ZILOG, AMD, HARRIS, SIEMENS, HITACHI, NEC, IBM, CYRIX, MOTOROLA o DEC también han desarrollador microprocesadores que, en algunos casos, han superado en prestaciones a los de INTEL. 8086 Fue el primer microprocesador de 16 bits desarrollado por INTEL en el año 1978. Se trata de un integrado de 20 pines con una estructura de direcciones de memoria de 20 bits, lo que permitía direccional hasta 1 Mb. Alcanzaba una velocidad de 4,7 Mhz y llego a 10 Mhz. Tuvo problemas de comercialización debido a su elevado precio. Este micro sentó las bases de lo que seria el desarrollo de los microprocesadores, guardando todos sus “descendientes” compatibilidad con el. 8088 Aparece en el año 1981 como sucesor del 8086. Internamente trabajaba con un bus de datos de 16 bits, aunque externamente, lo hace a 8 bits (lo que abarató considerablemente el resto de componentes). Su bus de direcciones, al igual que el 8086 era de 20 bits, lo que conseguía un área direccionable de memoria de 220= 1.048.576 = 1 MB. Con una velocidad de trabajo de 8 Mhz, en versiones posteriores se llegaron a alcanzar los 12 Mhz. En el año 1982 nace el 286 o primer microprocesador para ordenadores AT aunque no ve la luz hasta 1984. Algunos estaban soldados a la placa base mientras otros ya se colocaban sobre un zócalo. Aparece un competidor serio de INTEL: AMD. A partir de este momento AMD fabricara la misma tipologia de micros que INTEL, superándole en determinados casos. El 80286 disponía de un bus de datos de 16 bits y un bus de direcciones de 24 bits esto permitía que la memoria pudiera direccional hasta 16 Mb (224). La velocidad evolucionó desde 6 AT de 6 Mhz hasta los 12, 16 y 20 Mhz. 80386 Primero apareció el 386DX con una arquitectura tanto interna como externa de 32 bits. Fue el primero en incluir posibilidades de gráficos en color de alta resolución así como sonido. Este micro dependiendo del fabricante, trabajaba entre los 16 y 40 Mhz. Su formato también variaba según el fabricante, los de INTEL tenían 100 pines y
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
26
los de AMD 132. El 386DX era capaz de direccionar hasta 4 Gb de memoria, pero tenia el serio inconveniente del precio. El 386SX aparece como respuesta al alto precio del 386DX. Se trata de una versión degradada del microprocesador original pero también sustancialmente mas económica. Se diferencia por trabajar solo con 16 bits de datos externo y un bus de direcciones de 24 bits, además de tener un rango de frecuencia de trabajo desde 16 hasta 25 Mhz. i486 En 1989 aparecen los i486DX. El motivo del cambio de nomenclatura (históricamente después de 286 y 386 debería ser el 486) se debe a la oficina de patentes de EE.UU.. Dicha oficina no reconoce dígitos como marca registrada, lo que favorece a La competencia de empresas como CYRIX o AMD que pueden llamar a sus productos con el mismo nombre que INTEL. Se trata de un microprocesador que incorpora la propia CPU, además de un coprocesador matemático, un controlador de memoria caché de 128 bits y memorias caché de 4 Kb cada una, que trabajan como búfer intermedio entre la memoria principal y el micro, trabajando tanto de forma externa como interna con una estructura de 32 bits. Los distintos modelos que se encuentran en el mercado son SX, DX, DX2 y DX4 con velocidades comprendidas entre 25 y 133 Mhz. En el caso de los micros DX2 y DX4 lo que se hace es multiplexar la frecuencia por la velocidad interna del micro es distinta a la externa. Así, un 486DX2/66 trabajara a una frecuencia interna de 66 Mhz y una externa de 33 Mhz. El i486SX es similar al DX con la diferencia de no incluir el coprocesador matemático
PENTIUM El PENTIUM (o 586), presentó graves problemas en sus inicios debido a un error de fabricación en su modelo a 60 Mhz. Este error era provocado, bajo determinadas circunstancias, al realizar una operación de coma flotante. Posteriormente aparecieron distintos modelos que duplicaban la velocidad del bus, trabajando a 75, 90, 100, 120, 133, 150, 166, y 200 Mhz que funcionaban perfectamente. Una de las novedades que incorpora es el trabajar (a partir del P/66) a 3,3 v de alimentación en lugar de con 5 v. Esta novedad ya fue implementada por su competidor AMD en el
Existen unos integrados que si bien no pueden confundirse con los microprocesadores, si que guardan una relación evidente: son los coprocesadores matemáticos. Estos circuitos alivian al micro de las operaciones y cálculos complejos haciendo que el microprocesador pueda dedicarse a otra serie de operaciones. Es importante resaltar que no por instalar un coprocesador el ordenador trabajará mas rápido. Solo se apreciara en programas que requieran su uso, por ejemplo CAD. Su nomenclatura va en relación al microprocesador que complementan. Así, el coprocesador del 286 será el 287, el del 386 el 387 y así sucesivamente. Los coprocesadores pierden su protagonismo con la aparición del 486DX que ya lo incorpora de forma interna en el micro.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
27
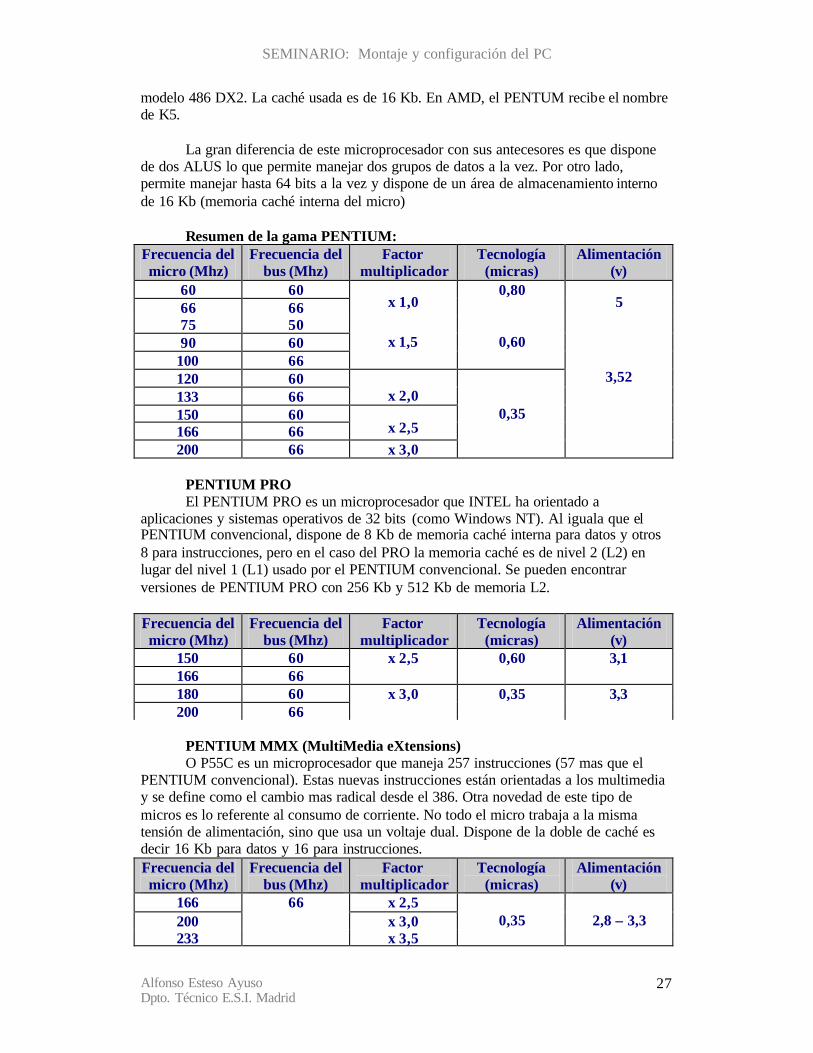
modelo 486 DX2. La caché usada es de 16 Kb. En AMD, el PENTUM recibe el nombre de K5. La gran diferencia de este microprocesador con sus antecesores es que dispone de dos ALUS lo que permite manejar dos grupos de datos a la vez. Por otro lado, permite manejar hasta 64 bits a la vez y dispone de un área de almacenamiento interno de 16 Kb (memoria caché interna del micro) Resumen de la gama PENTIUM: Frecuencia del micro (Mhz)
Frecuencia del bus (Mhz)
Factor multiplicador
Tecnología (micras)
Alimentación (v)
60 60 66 66
x 1,0 0,80
5
75 50 90 60
100 66
x 1,5
0,60
120 60 133 66
x 2,0
150 60 166 66
x 2,5
200 66 x 3,0
0,35
3,52
PENTIUM PRO El PENTIUM PRO es un microprocesador que INTEL ha orientado a aplicaciones y sistemas operativos de 32 bits (como Windows NT). Al iguala que el PENTIUM convencional, dispone de 8 Kb de memoria caché interna para datos y otros 8 para instrucciones, pero en el caso del PRO la memoria caché es de nivel 2 (L2) en lugar del nivel 1 (L1) usado por el PENTIUM convencional. Se pueden encontrar versiones de PENTIUM PRO con 256 Kb y 512 Kb de memoria L2. Frecuencia del micro (Mhz)
Frecuencia del bus (Mhz)
Factor multiplicador
Tecnología (micras)
Alimentación (v)
150 60 166 66
x 2,5 0,60 3,1
180 60 200 66
x 3,0 0,35 3,3
PENTIUM MMX (MultiMedia eXtensions) O P55C es un microprocesador que maneja 257 instrucciones (57 mas que el
PENTIUM convencional). Estas nuevas instrucciones están orientadas a los multimedia y se define como el cambio mas radical desde el 386. Otra novedad de este tipo de micros es lo referente al consumo de corriente. No todo el micro trabaja a la misma tensión de alimentación, sino que usa un voltaje dual. Dispone de la doble de caché es decir 16 Kb para datos y 16 para instrucciones. Frecuencia del micro (Mhz)
Frecuencia del bus (Mhz)
Factor multiplicador
Tecnología (micras)
Alimentación (v)
166 x 2,5 200 x 3,0 233
66
x 3,5
0,35
2,8 – 3,3
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
28
PENTIUM II Este micro consigue aunar la potencia del PENTIUM PRO con las ventajas
multimedia del MMX. Diseñado para 233, 266 y 300 Mhz dispone de una memoria caché interna de 512 Kb. Otra novedad incluida es el tipo de zócalo que INTEL lanza como nuevo estándar para su microprocesador: el SEC (“single Edge Connect”) que ira “pinchado” en el slot 1.
La memoria caché integrada ya no va integrada en el propio micro. Este tipo de
montaje facilitaba la velocidad de transferencia. En el caso del PENTIUM II, la memoria caché de segundo nivel va en un circuito impreso que sirve de soporte para el micro. Esto baja la transferencia a pesar de que INTEL aseguraba que se aumentaba.
El nuevo diseño externo (similar a un cartucho de video-consola) tiene dos
funciones primordiales: 1. Aislamiento que permite apantallar el microprocesador de los demás
componentes y viceversa: impedir que el resto de los componentes interfieran sobre el correcto funcionamiento del micro, la elevada frecuencia de trabajo puede provocar interferencias.
2. Soporte del disipador ventilador que , dadas las condiciones de refrigeración necesarias en el micro debía ser muy voluminoso.
Otra novedad de el micro es que soporta buses AGP
Frecuencia del micro (Mhz)
Frecuencia del bus (Mhz)
Factor multiplicador
Tecnología (micras)
Alimentación (v)
233 x 3,5 266 x 4,0 300 x 5,0
400 x 6,0
500
66
x7,5
0,25
3,3
PENTIUM CELERON Aunque no sea la idea con la que INTEL pretende vender este producto, el
Celeron se puede entender como un PENTIUM II SX. Se trata de un microprocesador inferior al PENTIUM II pero con mejor precio. Este micro apareció bajo dos encapsulados diferentes: el SEPP y el PPGA. El primero fue el mas común, recordando el típico de PENTIUM II pero con la carencia de uno de los laterales plásticos (mas adelante también aparecieron algunos PENTIUM II con este encapsulado). Por otro lado el PPGA casi siempre se suministraba con
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
29
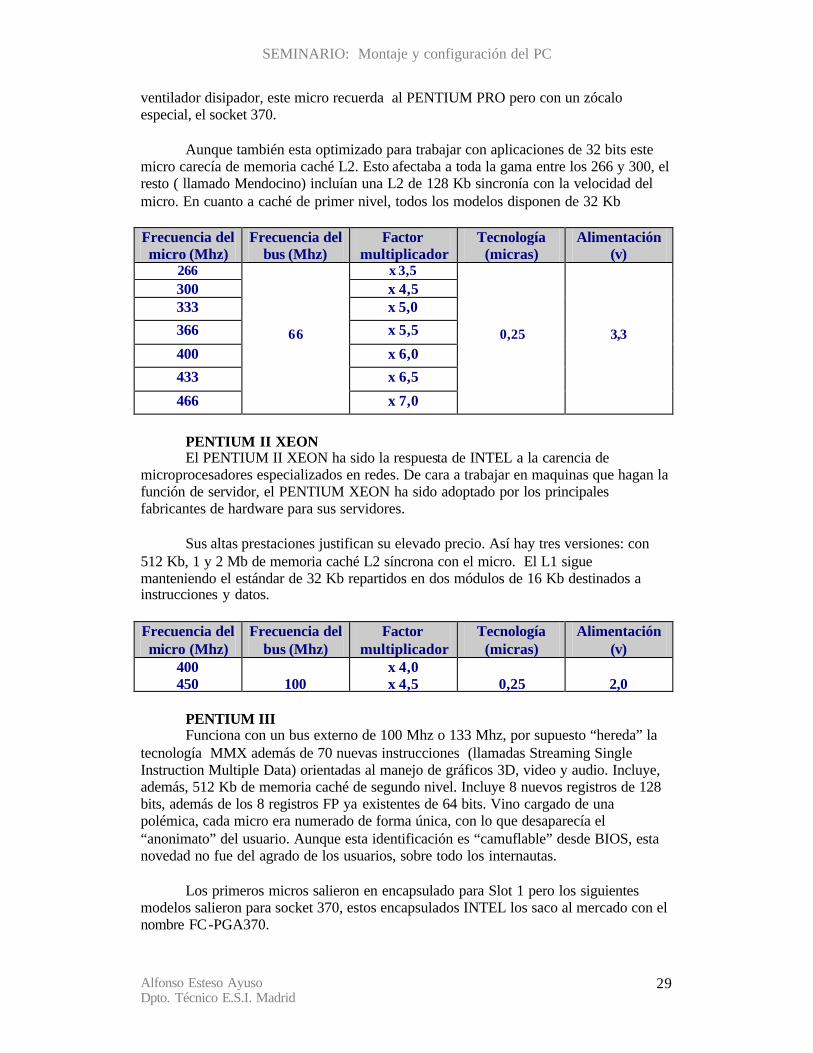
ventilador disipador, este micro recuerda al PENTIUM PRO pero con un zócalo especial, el socket 370. Aunque también esta optimizado para trabajar con aplicaciones de 32 bits este micro carecía de memoria caché L2. Esto afectaba a toda la gama entre los 266 y 300, el resto ( llamado Mendocino) incluían una L2 de 128 Kb sincronía con la velocidad del micro. En cuanto a caché de primer nivel, todos los modelos disponen de 32 Kb Frecuencia del micro (Mhz)
Frecuencia del bus (Mhz)
Factor multiplicador
Tecnología (micras)
Alimentación (v)
266 x 3,5 300 x 4,5 333 x 5,0
366 x 5,5
400 x 6,0
433 x 6,5
466
66
x 7,0
0,25
3,3
PENTIUM II XEON El PENTIUM II XEON ha sido la respuesta de INTEL a la carencia de microprocesadores especializados en redes. De cara a trabajar en maquinas que hagan la función de servidor, el PENTIUM XEON ha sido adoptado por los principales fabricantes de hardware para sus servidores. Sus altas prestaciones justifican su elevado precio. Así hay tres versiones: con 512 Kb, 1 y 2 Mb de memoria caché L2 síncrona con el micro. El L1 sigue manteniendo el estándar de 32 Kb repartidos en dos módulos de 16 Kb destinados a instrucciones y datos. Frecuencia del micro (Mhz)
Frecuencia del bus (Mhz)
Factor multiplicador
Tecnología (micras)
Alimentación (v)
400 x 4,0 450
100 x 4,5
0,25
2,0
PENTIUM III Funciona con un bus externo de 100 Mhz o 133 Mhz, por supuesto “hereda” la
tecnología MMX además de 70 nuevas instrucciones (llamadas Streaming Single Instruction Multiple Data) orientadas al manejo de gráficos 3D, video y audio. Incluye, además, 512 Kb de memoria caché de segundo nivel. Incluye 8 nuevos registros de 128 bits, además de los 8 registros FP ya existentes de 64 bits. Vino cargado de una polémica, cada micro era numerado de forma única, con lo que desaparecía el “anonimato” del usuario. Aunque esta identificación es “camuflable” desde BIOS, esta novedad no fue del agrado de los usuarios, sobre todo los internautas. Los primeros micros salieron en encapsulado para Slot 1 pero los siguientes modelos salieron para socket 370, estos encapsulados INTEL los saco al mercado con el nombre FC-PGA370.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
30
Frecuencia del micro (Mhz)
Frecuencia del bus (Mhz)
Factor multiplicador
Tecnología (micras)
Alimentación (v)
450 slot 1 X 4,5 500 slot 1 X 5,0 550 slot 1 X 5,5
600 X 6,0 650
100
X 6,5 667 133 X 5,0 700 100 X 7,0 733 X 5,5 800
133 X 6,0
850 100 X 8,5 866 X 6,5 933 X 7,0
1000 X 7,5 1100
133 X 8,0
0,18
1,7
PENTIUM 4 Lo mas llamativo de este micro es que se trata de un desarrollo completamente nuevo, es decir, no se ha apoyado en diseños anteriores como ocurría, por ejemplo, con el PENTIUM III (que era PENTIUM II avanzado). El formato en el que se suministra es para socket 423 y socket 478, el primero lo utilizan los micros fabricados con tecnología de 0,18 micras, con la llegada de la tecnología 0,13 micras obligó a adoptar un método de fijación mas adecuado: el socket 478. Aunque con un mayor numero de pines, su tamaño es muy inferior gracias a la reducción del tamaño del micro. Es cierto que el calor generado y disipado por la tecnología 0,13 es mucho menor, pero si la única parte que esta en contacto con el disipador fuera la del micro, este no duraría mucho. Por ello los PENTIUM 4 para socket 478 cuentan con su parte superior completamente cubierta de una superficie metálica encargada de disipar calor de una manera mas eficaz. Este encapsulado se llama FC -PGA2. Soporta un bus del sistema de 400 Mhz. Si se pretende ser serio, realmente no es esta la velocidad de bus a la que se puede trabajar sino que se aplica un doble DDR para obtener mejores resultados.
La tecnología Hyper Pipelined duplica el canal de ejecución a 20 etapas (frente a las 12 del Athlon de AMD), mejorando significativamente el desempeño y la capacidad de frecuencia. Incluye 144 nuevas instrucciones SIMD2. Actualmente se encuentran en el mercado versiones a unas velocidades de: 1,3 Ghz, 1,4 Ghz, 1,5 Ghz, 1,7 Ghz y 2 Ghz. Dentro de los inconvenientes que acompañan a este micro, aparece uno que mas bien tiene la calificación de burocrático aunque se manifieste en el terreno técnico. En concreto es el contrato INTEL - Rambus donde la primera compañía se compromete al diseño de micros que utilicen los módulos de memoria fabricados por la segunda: los RDRAM. Esto es un claro inconveniente ya que esta memoria es muy cara (Rambus tiene el monopolio y exige el pago de royalties para terceros). Por supuesto esto condiciona el tipo de Chipset a utilizar que debe ser el i850. La memoria RDRAM debe funcionar con el PENTIUM 4 y su chipset i850 de forma
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
31
obligatoria en parejas y con módulos iguales. INTEL en la presentación del PENTIUM 4 a 2 Ghz (27 de agosto 2001) presentó en primicia el nuevo chipset i845 con soporte para SDRAM Pc133 lo que supondrá una reducción de costes que favorecerán al usuario final. MICROPROCESADORES AMD:
• AM386 y AMD486, fueron los primeros procesadores que rompieron el monopolio de INTEL, eran equivalentes a los 386 y 486 de este fabricante.
• K5. se diseñó para enfrentarse a los PENTIUM II. Funciona con aplicaciones de 16 y 32 bits e incorpora me moria caché L1. en los modelos de mas alto nivel el bus funciona a 66 Mhz, su gama va del PR75 al PR166.
• K6. Sus prestaciones superan a las de PENTIUM MMX, aunque están por debajo de las del PENTIUM II, incorpora mas memoria caché L1 que su predecesor y el modelo de mas alto nivel, el de 300 Mhz, admite velocidades de bus de 100 Mhz.
• K6-II. Todos sus modelos soportan el bus de 100 Mhz y ya soporta AGP. Se ha aumentado la memoria L1 e incorpora un juego de instrucciones, denominadas 3DNow!, que aceleran en gran medida las aplicaciones 3D. Se presenta en modelos que van desde 300 Mhz a 500.
• K6-III. Se presenta con velocidades desde 400 Mhz. Incorpora las instrucciones 3DNow!, y un sistema innovador llamado TriLevel, que cuadriplica el rendimiento de la memoria caché
• DURON. A partir de 750 Mhz, se trata de una versión mas económica del Athlon, aunque su aparición es posterior. La caché L2 alcanza los 192 Kb y la velocidad del bus es de 200 Mhz
• K7 Athlon. Es el mas reciente microprocesador de AMD. Esta disponible a partir de velocidades a partir de 500 Mhz y por encima de 1,5 Ghz, con una velocidad de bus interno de hasta 266 Mhz. Incluye 128 Kb de caché L1 y también L2.
MEMORIA La memoria es uno de los componentes principales del PC. Su función es la de almacenar datos e instrucciones de forma temporal, y de ahí la razón de su nombre con la analogía biológica. Un PC dispone principalmente de dos tipos de memoria : ROM y RAM. La diferencia evidente entre ellas es que la primera es de solo lectura, es decir, no se puede borrar ni escribir (inicialmente) y la segunda permite su uso completo al usuario, con el matiz de la volatilidad o lo que es lo mismo, la perdida de datos ante una falta de suministro eléctrico. ROM Read Only Memory. Se trata de una memoria de solo lectura implementada por el fabricante para uso del PC. Entre otras cosas, contiene rutinas del sistema BIOS. Existen tres variaciones básicas sobre esta memoria: PROM, EPROM y EEPROM PROM Programmable ROM. Se trata de un chip ROM “en blanco” sin ningún contenido que permitía su escritura. Solo se puede escribir una vez.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
32
EPROM Erasable Programmable ROM. Es similar a la anterior, pero puede ser reescrita. El proceso de borrado consiste en la aplicación de luz ultravioleta en una ventana que el chip tiene en su zona superior. Una vez aplicada dicha luz durante un determinado intervalo de tiempo, la EPROM está dispuesta para ser reescrita nuevamente. EEPROM Electrically Erasable Programable ROM. Es la popularmente conocida “FLASH BIOS”. De prestaciones identicas a la EPROM, elimina el molesto proceso de borrado y lo substituye por un control software. Esto permite, en el caso de la BIOS, que el usuario pueda actualizar la misma con las mejoras que se implementen por software RAM Random Access Memory. Es la memoria de acceso aleatorio. Se trata de una memoria que esta a disposición del usuario. Tiene la característica de ser de lectura y escritura además de volátil. En función de cómo son capaces de mantener los datos el usuario podrá encontrar memorias estáticas SRAM (Static RAM) o dinámicas DRAM (Dinamic RAM). Las denominadas estáticas mantienen sus datos sin ninguna otra aportación que la carga de datos inicial y el fluido eléctrico. Las memorias dinámicas precisan que se les “recuerde” el va lor que se desea almacenar. Según el tipo de memoria estos refrescos se realizan con mayor o menor frecuencia. FORMATO FISICO DE LOS MODULOS DE MEMORIA RAM DUAL INLINE PACKAGE (DIP) Son integrados de distintos tamaños, generalmente encapsulados en plásticos y cerámica. Se trata del modelo mas antiguo y se instalaba directamente sobre zócalos o soldados en la placa base. Por supuesto, la ampliación de la memoria de un PC en ausencia de bancos implicaba el uso del soldador y, si el chip daba problemas había que volver marcha atrás. Estos DIP son los que componen los módulos actuales. MODULO SIP Son pequeñas placas rectangulares de fibra de vidrio o baquelita que llevan en uno de sus lados más largos unas terminaciones en forma de pines. Estos son los que se insertaran sobre un zócalo especial situado en la placa base. Este formato, no excesivamente difundido, perduro solo en módulos de 30 contactos y pronto se dejó de usar debido a la fragilidad y riesgo de rotura que corrían los pines en el momento de la inserción del modulo. MODULO SIMM “Single In Line Memory Module” Son iguales a los SIP. La diferencia es que los módulos SIP presentaban el problema de poder doblar fácilmente los pines. De cara a eliminar dicho problema, los módulos SIMM llevan unas terminaciones de cobre formadas por la propia pista de la placa. En uno de los lados se ha efectuado un pequeño rebaje rectangular, junto a los contactos para mantener su posición correcta en el banco. Dentro de los SIMM existen dos formatos: para 30 y 72 contactos, de 8 y 32 bits respectivamente. Los de 30 contactos miden unos 9 cm. y los de 72 cerca de los 11 cm.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
33
MODULO DIMM “Dual In Line Memory Module”. Los módulos de memoria DIMM tienen 168 contactos divididos en tres bloques de 20, 60 y 88 pines soportando el acceso a 64 bits. Van insertadas sobre un zócalo similar a un SIMM “largo” de 13 cm. con sujeciones en los extremos. La memoria DIMM se encuentra en tres velocidades diferentes en el mercado: 66, 100 y 133 Mhz
MODULO RIMM “Rambus In Line Memory Module” Los módulos RIMM vienen con frecuencias de reloj de 300MHz, 356MHz y 400MHz. En cada ciclo de reloj realiza dos operaciones, lo que permite aumentar su tasa de datos a los estándares PC600, PC700 y PC800. Utilizan nuevos chips y se ensamblan en placas de igual tamaño a los DIMM, pero con 184 contactos. Tienen que ir en “parejas” como los módulos SIP y SIMM pero los bancos que quedan libres hay que “cerrarlos” con unas placas terminales que se incluyen con la placa base. Habitualmente no se ven los chips pues van recubiertos con un encapsulado metálico.
MEMORIA EN CUANTO A LA TECNOLOGIA EMPLEADA Lógicamente la memoria ha evolucionado, no solo en su formato físico, sino también en estructura, organización interna y velocidad de respuesta. Parte de esta última característica ha venido como consecuencia de la evolución de materiales y tecnología de trabajo, pero quizás el cambio mas significativo haya sido la aparición de la memoria síncrona. Realmente todos los tipos de memoria existentes son sincronos, ya que mantienen una relación con el reloj del sistema que indica cuando se debe realizar una operación, ahora bien, esta relación no siempre se produce de forma directa, es decir, no
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
34
siempre hay una correspondencia ciclo de CPU-ciclo de memoria. Este es el motivo por el que ha sido preciso que el controlador de memoria implementado en el Chipset se encargue de “dejar pasar ciclos” para dar tiempo a la memoria. Por memoria síncrona, también llamada SDRAM, se entiende aquella que su relación con el reloj principal del sistema es 1:1, en otras palabras: no hay estados de espera. Así suponemos un micro con una frecuencia de trabajo de 500 Mhz ( que se corresponde a 5 x 100 Mhz). En este hipotético PC la memoria trabajaría a 100 Mhz, dando así una respuesta eficaz al resto del sistema. MEMORIAS DRAM ASINCRONAS En un principio las DRAM asíncronas han sido el soporte de almacenamiento temporal de todos los microprocesadores contemporáneos. Tal y como su nombre indica, este tipo de memoria es asíncrono. Esto no implica que no debe trabajar con el reloj del PC, sino que no se da una correspondencia 1:1, es decir que se emplean tiempos de espera y divisores de frecuencia. Los tres tipos más comunes de DRAM asíncrona son los siguientes:
• CONVENCIONAL DRAM. Se trata de un tipo de memoria obsoleta y fue la precursora de la Fast Page Mode. Su direccionamiento es estándar y sencillo, ya que se envían en primer lugar la dirección de la fila y posteriormente la de la columna para acceder a una celda concreta.
• FAST PAGE MODE DRAM. Se la conoce con el acrónimo de FPM y se trata de un estándar más rápido que la DRAM convencional. En este tipo de memoria se aprovecha la misma fila de activación para “abrir” varias direcciones de memoria coincidentes en dicha fila. Su nombre “page” viene dado por la capacidad de trabajar con páginas completas, ya que es así como se conoce a la información contenida en una fila de direcciones.
• EDO RAM (Extended Data Out RAM). Frente a la DRAM es la memoria asíncrona mas barata además de ofrecer una mayor velocidad. Esto lo consigue permitiendo realizar nuevas lecturas de datos antes de que el ultimo ciclo de lectura se haya completado este proceso aumenta un 15 % el rendimiento con respecto a la “Fast Page”. Este tipo de memoria solo se encuentra en formato SIMM y con una velocidad del bus de 66 Mhz.
MEMORIAS DRAM SINCRONAS En un determinado momento surgen necesidades que obligan a la memoria a dar un salto importante en cuanto a velocidad se refiere. Las altas frecuencias de trabajo de los microprocesadores se soportan en factores de multiplicación que deben contar con un bus rápido y fiable. De poco sirve este incremento si se han de generar ciclos de espera en la memoria. Es preciso, por tanto, disponer de una memoria capaz de conmutar con el bus, respondiendo a la misma frecuencia, situada en el origen a 100 Mhz. Los tipos más comunes son los siguientes:
• DDR SDRAM “Double Data Rate SDRAM”. Es la versión más rápida de la SDRAM. De forma habitual, la memoria sincrona se rige por los pulsos del reloj del sistema. Ahora bien, cada pulso se puede descomponer en 4 “señales” diferentes: flanco de subida (del 0 al 1), flanco de bajada (del 1 al 0), nivel alto (1) y nivel bajo (0). La memoria habitualmente funciona por un

SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
35
único flanco. En este caso la DDR es capaz de duplicar el rendimiento siendo sincrona al flanco de subida y al de bajada de un mismo pulso
• DDR DRDRAM “Direct Rambus DRAM”. Se trata de un sistema a todos los efectos desarrollado por acuerdo entre las compañías Rambus e INTEL. Incorpora su propio bus de direcciones, datos y control de gran velocidad. Samsung Electronics fue el primero en implantar el RIMM en formato básico de 64 Mb. Estos módulos funcionan en un rango de velocidades comprendido entre 800 Mhz y 1 Ghz. Esta por ver si se convertirá en un nuevo estándar de memoria, ya que si por tecnología debería llegar a serlo, el inconveniente de pago de royalties que la empresa impone por su uso a otros fabricantes puede echarlo atrás.
• DDR SLDRAM “Synchronous Link DRAM”. Parece ser la única tecnología comparable con la DRDRAM. Diseñada por un consorcio de 12 fabricantes los módulos SLDRAM son una extensión de la SDRAM de la arquitectura de cuatro bancos hasta la de 16. el primer diseño de esta tecnología funciona con 64 bits a 200 Mhz, pudiendo alcanzar los 400 Mhz.
LA MEMORIA CACHÉ Existe un tipo de memoria denominado caché que se incorpora en la placa base para agilizar los procesos entre la memoria del sistema y el microprocesador. Habitualmente en los 486 se incorporaba este tipo de memoria en un zócalo DIL (Dual In Line), aunque en las placas base PENTIUM se tiende a un zócalo donde se pueda insertar la memoria que el usuario desee. Habitualmente estas memorias han sido asíncronas y ultimadamente se tiende al tipo sincrono que llega a aumentar hasta un 13% el rendimiento. Estos tipos de memoria aceleran considerablemente todo el proceso, ya que son capaces de enviar más instrucciones al microprocesador en menos tiempo (SRAM con tiempos de acceso inferiores a 2 nseg). Por lo general, las placas llevan soldada la memoria aunque algunas incorporan zócalos para ampliación llamados COAST (“Cache On A STick”) en módulos similares a los SIMM. Esta memoria se sitúa entre el microprocesador y la RAM del sistema de forma que el controlador de la caché se ira anticipando a la CPU y suministrara información a la memoria caché desde la RAM en previsión de lo que el microprocesador necesite. La memoria caché de primer nivel L1 Es aquella que esta implementada en el propio microprocesador. La de segundo nivel L2 es la que se encuentra en la placa base (salvo el caso del PENTIUM II que la llevaba en la placa-circuito impreso del encapsulado) SOPORTES FISICOS DE LA INFORMACION DISQUETERAS. Son sin duda uno de los componentes integrados en el PC mas usados. Estos dispositivos permiten leer y grabar unidades de disco flexible que el usuario podrá intercambiar con otras maquinas. El abaratamiento de otros soportes de información ha relegado a las disqueteras a una mera interfaz entre el disco duro y el usuario, pero, aun si, seria impensable disponer de un PC carente de disquetera.
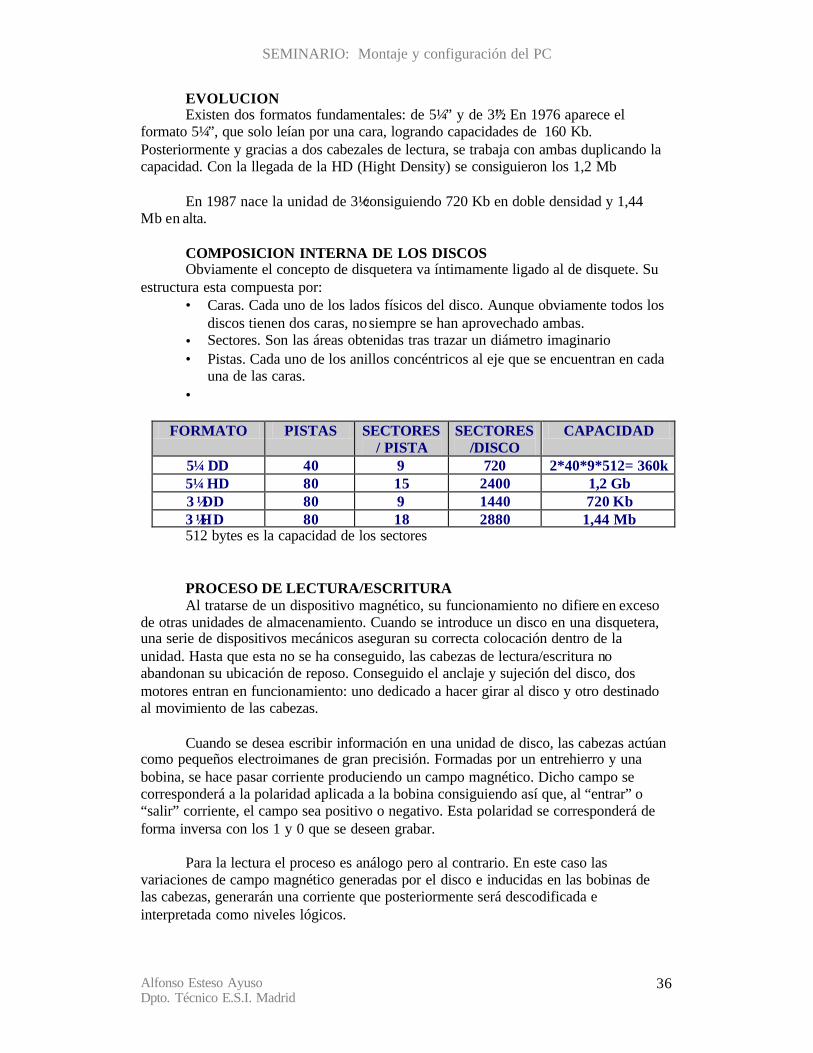
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
36
EVOLUCION Existen dos formatos fundamentales: de 5¼” y de 3½”. En 1976 aparece el formato 5¼”, que solo leían por una cara, logrando capacidades de 160 Kb. Posteriormente y gracias a dos cabezales de lectura, se trabaja con ambas duplicando la capacidad. Con la llegada de la HD (Hight Density) se consiguieron los 1,2 Mb En 1987 nace la unidad de 3½ consiguiendo 720 Kb en doble densidad y 1,44 Mb en alta. COMPOSICION INTERNA DE LOS DISCOS Obviamente el concepto de disquetera va íntimamente ligado al de disquete. Su estructura esta compuesta por:
• Caras. Cada uno de los lados físicos del disco. Aunque obviamente todos los discos tienen dos caras, no siempre se han aprovechado ambas.
• Sectores. Son las áreas obtenidas tras trazar un diámetro imaginario • Pistas. Cada uno de los anillos concéntricos al eje que se encuentran en cada
una de las caras. •
FORMATO PISTAS SECTORES
/ PISTA SECTORES
/DISCO CAPACIDAD
5¼ DD 40 9 720 2*40*9*512= 360k 5¼ HD 80 15 2400 1,2 Gb 3 ½ DD 80 9 1440 720 Kb 3 ½ HD 80 18 2880 1,44 Mb 512 bytes es la capacidad de los sectores PROCESO DE LECTURA/ESCRITURA
Al tratarse de un dispositivo magnético, su funcionamiento no difiere en exceso de otras unidades de almacenamiento. Cuando se introduce un disco en una disquetera, una serie de dispositivos mecánicos aseguran su correcta colocación dentro de la unidad. Hasta que esta no se ha conseguido, las cabezas de lectura/escritura no abandonan su ubicación de reposo. Conseguido el anclaje y sujeción del disco, dos motores entran en funcionamiento: uno dedicado a hacer girar al disco y otro destinado al movimiento de las cabezas. Cuando se desea escribir información en una unidad de disco, las cabezas actúan como pequeños electroimanes de gran precisión. Formadas por un entrehierro y una bobina, se hace pasar corriente produciendo un campo magnético. Dicho campo se corresponderá a la polaridad aplicada a la bobina consiguiendo así que, al “entrar” o “salir” corriente, el campo sea positivo o negativo. Esta polaridad se corresponderá de forma inversa con los 1 y 0 que se deseen grabar. Para la lectura el proceso es análogo pero al contrario. En este caso las variaciones de campo magnético generadas por el disco e inducidas en las bobinas de las cabezas, generarán una corriente que posteriormente será descodificada e interpretada como niveles lógicos.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
37
CARACTERISITICAS DE UNA UNIDAD DE DISCO SENSIBILIDAD Se trata del ancho de pista que es capaz de leer la cabeza de la disquetera. La información se lee sobre pistas concéntricas alrededor del eje. Un mayor numero de pistas aumenta la sensibilidad peor también hace que el ancho de las pistas sea menor. Aunque se guarda una distancia de seguridad entre pistas, cabe la posibilidad de error si la cabeza no está lo suficientemente ajustada para leer o escribir donde debe. VELOCIDAD DE ROTACION Dentro de una disquetera se producen varios tipos de movimientos. Uno de ellos es el de rotación alrededor del eje. Esta velocidad, en todos los casos, es de 300 r.p.m., excepto en el caso de las unidades de 5¼ de alta densidad donde dicha velocidad aumenta hasta 360 r.p.m. CENTRADO Hace referencia a la posición física del disco duro introducido, con respecto al eje de giro de la disquetera. Ya que la lectura/escritura sobre disco se realiza de manera tangencial, es necesario una correcta alineación. Esto se consigue mediante anclajes mecánicos y no es un error habitual. TANGENCIA Se trata de al posición que la cabeza de lectura/escritura debe adoptar para trabajar con el disco. Ya que los datos están escritos “de forma circular”, se debe acceder a ellos de forma tangencial. Una mala colocación de la cabeza repercutirá en problemas con los discos. IDENTIFICACION LOGICA DE UNA DISQUETERA La conexión a la controladora se realiza mediante un cable plano de 34 líneas. Para indicar si se desea trabajar con una unidad de disco de forma que se denomine A: o B: se realiza mediante el cruce del bus. Consiste en un pequeño cruce de hilos en el bus de las disqueteras. En dicho bus circulan, entre otras, dos señales independientes de activación de motor y dos señales independientes de selección de unidad (“drive select” en las líneas 14 para A: y 12 para B:). la recepción de datos en las disqueteras se produce en el pin 16 para la activación de motor y en el 12 la selección de unidad. Dándose el cruce precisamente en estos hilos, se produce el efecto deseado. DISCOS DUROS Al igual que las disqueteras, son dispositivos mecánicos de lectura/escritura. El principio es el mismo: consiste en varios discos que giran juntos y unas cabezas que acceden a ellos. Las cabezas de lectura, a diferencia de las disqueteras, no están en contacto con el disco sino que “flotan” en el colchón de aire que se produce en el giro. La distancia entre las cabezas y la superficie del disco es tan pequeña que una simple partícula de humo entre ambas bastaría para dañar la cabeza. Pro este motivo, los discos están encapsulados herméticamente. Todos los cabezales se mueven a la vez mediante un motor sincrono auxiliar. Es una controladora la que decide que cabeza lee o escribe en cada momento. En los discos duros, la parte superior del primer plato es la cara 0, la inferior, la 1, en el s egundo plato, la parte superior será la 2, la inferior la 3 y así sucesivamente. La pista 0 es la mas exterior.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
38
EL DISCO DURO A ESCALA FISICA Un disco duro es un dispositivo hermético en cuyo interior se encuentran los platos donde se guarda la informa ción y unas cabezas para leer o escribir sobre ellos. Además, existen dos motores, uno encargado de hacer girar el disco y otro para el movimiento de las cabezas. El conjunto se complementa con una electrónica capaz de sincronizar los dos motores, acciones de las cabezas, procesos de lectura/escritura y codificación/descodificación de información y memoria. El funcionamiento en el ámbito conceptual es sencillo. Los diferentes platos que conforman el disco y de forma solidaria un mismo eje giran a una velocidad determinada. Cuando la información llega al disco duro en formato paralelo es preciso codificarla para obtener buenos resultados información/unidad de superficie y se transforma en datos serie. Estos datos son los que, por inducción, excitaran una bobina que, en definitiva, no es más que la cabeza de escritura. Esta, cuando esta situada en el sector donde se desea escribir, magnetizará la superficie del disco quedando así la información almacenada. La lectura es similar, pero es el propio disco el que por inducción sobre la cabeza consigue que le magnetismo se convertirá en corriente que podría ser interpretada digitalmente. Por supuesto el proceso de decodificación y conversión serie -paralelo se realiza antes de “entregar” la lectura al bus. PLATOS Suelen ser de una aleación de aluminio sobre la que se ha depositado una sustancia magnética que puede ser oxido de hierro. En algunos casos existe un recubrimiento adicional por encima de la superficie magnética, un derivado de carbono para proteger la superficie de posibles colisiones MATERIAL DEL SOPORTE OPTICO Se debe aplicar una sustancia susceptible de ser magnetizada sobre la superficie del disco. Interesa que dicha sustancia tenga un coeficiente de rozamiento muy bajo y esté pulida por posibles “aterrizajes” inesperados de las cabezas. Debe tener también una buena estabilidad a la temperatura, ya que las dilataciones y contracciones pueden alterar el fino posicionamiento de los datos dando lugar a errores de direccionamiento. CABEZALES DE LOS DISCOS Son los encargados de leer y escribir en los platos. Aunque los primeros cabezales usados fueron de ferrita y, básicamente, electroimanes, se han substituido por los magneto resistivos (MR), diseñados por IBM. Este tipo de cabezal incluye dos cabezas independientes: una para lectura y otra para escritura. Aunque el proceso de escritura no varia demasiado con respecto al de una disquetera, el de lectura emplea una resistencia que varia en función del campo magnético al que es sometida. Este sistema permite la miniaturización de los cabezales y un aumento de densidad de grabación muy importante. El hecho de utilizar cabezales cada vez mas pequeños y acercarlos mas a la superficie del disco, favorece poder trabajar dominios magnéticos menores en superfic ie, aumentando así la densidad de datos. Ahora bien, esto exige una mayor fiabilidad de componentes y se incrementa el riesgo de “aterrizajes” sobre la superficie del disco. De cara a evitar estos problemas, se protegen las superficies de los discos con materiales deslizantes.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
39
MOTOR DE POSICIONAMIENTO Es el encargado de desplazar las cabezas hasta la posición física del disco a la que se desea acceder. De el dependen todas las cabezas montadas como si de un peine se tratase, donde cada púa tiene un cabezal en su extremo. Aunque las cabezas se mueven de forma conjunta, solo es una la que trabaja en un momento determinado. MOTOR DE ROTACION Es el encargado de hacer girar los discos sobre un mismo eje. Debe ser de gran precisión, ya que las variaciones máximas permitidas están en torno al 5% sobre velocidades que oscilan entre las 3600 y 12000 r.p.m. asociado a dicho motor se encuentra un circuito que se encarga de estabilizar la velocidad. Los dos motores implicados en la dinámica del disco funcionan a 12 v, mientras que los 5 v suministrados por la fuente de alimentación se usan para la electrónica del disco. EL DISCO DURO A ESCALA LOGICA Para poder referenciar el disco es necesario establecer unas delimitaciones lógicas que identifiquen cada posic ión del disco. La estructura es la siguiente:
• Cluster. Es la unidad mínima de información y se compone de varios sectores. La conjunción de varios clústeres, a su vez, conforma una pista.
• Pista. Hace referencia a cada uno de los círculos concéntricos al eje en que se divide el disco y corresponde a la trayectoria que marcaría la cabeza inmóvil por el movimiento de rotación del disco. Se divide en clústeres y la pista mas exterior corresponde al numero 0, incrementándose hacia el centro del disco.
• Cilindros. Es el conjunto de la misma pista en los diferentes platos. Su nombre viene del cilindro imaginario que se formaría si se uniesen todas las pistas iguales en los diferentes platos, formando la figura tridimensional de la que procede el nombre.
• Sectores. Son las diferentes porciones angulares en que se divide un plato, tomando como inicio el propio eje del disco y comenzando su numerario en q. Pro supuesto, la longitud en un sector da la pista mas interna y la mas externa serán de diferente longitud aunque contengan la misma capacidad. A pesar de esto, todas las pistas tienen el mismo numero de sectores. El tamaño del sector dependerá de la densidad de datos y del proceso de codificación. Varios sectores conforman un cluster. La capacidad de un sector es de 512 bytes.
MODO DE TRANSFERENCIA MODO PIO El modo PIO (Programmed Input Output) indica la tasa de transferencia de datos del disco según la tabla siguiente. Depende de forma directa de la velocidad del bus del sistema desarrollándose la transferencia a través de los puertos entrada/salida de la controladora que también sirven para la transmisión de comandos.
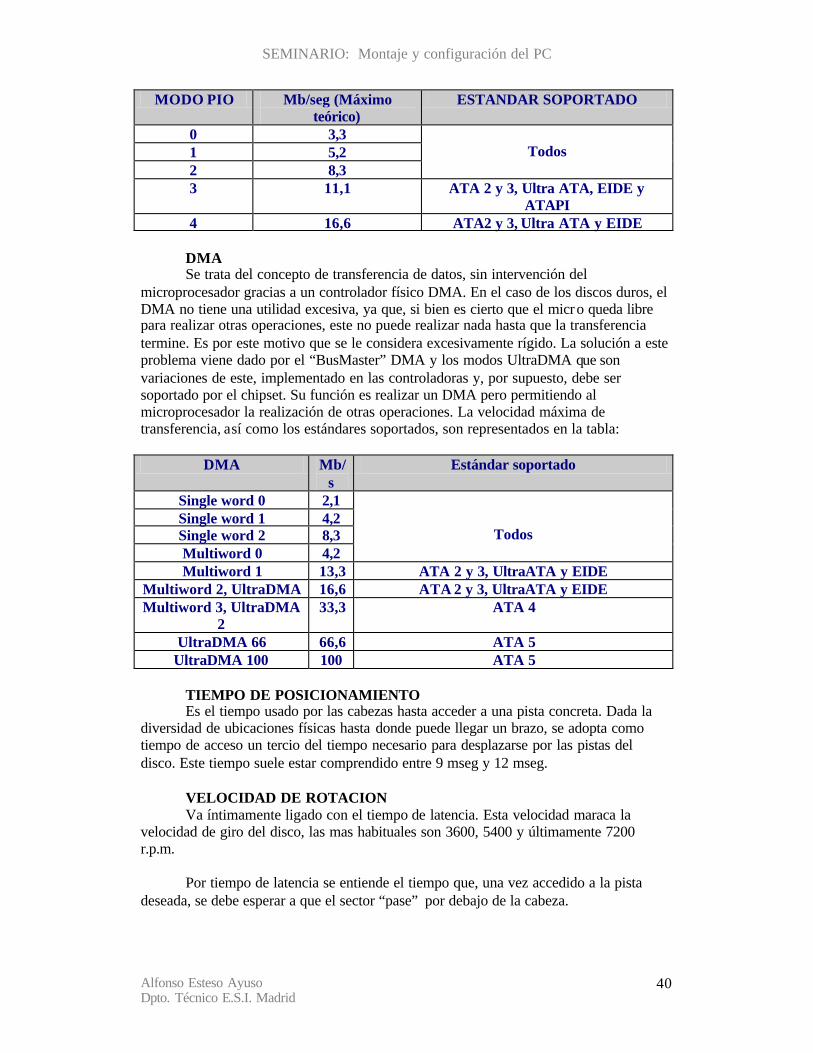
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
40
MODO PIO Mb/seg (Máximo teórico)
ESTANDAR SOPORTADO
0 3,3 1 5,2 2 8,3
Todos
3 11,1 ATA 2 y 3, Ultra ATA, EIDE y ATAPI
4 16,6 ATA2 y 3, Ultra ATA y EIDE DMA Se trata del concepto de transferencia de datos, sin intervención del microprocesador gracias a un controlador físico DMA. En el caso de los discos duros, el DMA no tiene una utilidad excesiva, ya que, si bien es cierto que el micro queda libre para realizar otras operaciones, este no puede realizar nada hasta que la transferencia termine. Es por este motivo que se le considera excesivamente rígido. La solución a este problema viene dado por el “BusMaster” DMA y los modos UltraDMA que son variaciones de este, implementado en las controladoras y, por supuesto, debe ser soportado por el chipset. Su función es realizar un DMA pero permitiendo al microprocesador la realización de otras operaciones. La velocidad máxima de transferencia, así como los estándares soportados, son representados en la tabla:
DMA Mb/s
Estándar soportado
Single word 0 2,1 Single word 1 4,2 Single word 2 8,3 Multiword 0 4,2
Todos
Multiword 1 13,3 ATA 2 y 3, UltraATA y EIDE Multiword 2, UltraDMA 16,6 ATA 2 y 3, UltraATA y EIDE Multiword 3, UltraDMA
2 33,3 ATA 4
UltraDMA 66 66,6 ATA 5 UltraDMA 100 100 ATA 5
TIEMPO DE POSICIONAMIENTO Es el tiempo usado por las cabezas hasta acceder a una pista concreta. Dada la diversidad de ubicaciones físicas hasta donde puede llegar un brazo, se adopta como tiempo de acceso un tercio del tiempo necesario para desplazarse por las pistas del disco. Este tiempo suele estar comprendido entre 9 mseg y 12 mseg. VELOCIDAD DE ROTACION Va íntimamente ligado con el tiempo de latencia. Esta velocidad maraca la velocidad de giro del disco, las mas habituales son 3600, 5400 y últimamente 7200 r.p.m. Por tiempo de latencia se entiende el tiempo que, una vez accedido a la pista deseada, se debe esperar a que el sector “pase” por debajo de la cabeza.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
41
TECNOLOGIA S.M.A.R.T. Trata de ser una solución a las averías de los discos duros. Dadas las características de los discos (movimientos, fricción, calentamiento...), este tipo de dispositivos tienen una vida limitada y, por supuesto, imprevisible en su final. Llegado el caso, lo importante de la perdida no suele ser el propio disco sino los datos que contiene. Intentando dar respuesta a esta problemática aparece la tecnología S.M.A.R.T. o de “Auto monitorización, análisis e informes”, que intenta avisar al usuario de los errores previsibles que pueden suceder en su disco duro. Algunos no habrá forma de prevenirlos dada su naturaleza (rotura de cabezales, daños por golpes...) pero otros si. Un ejemplo podría ser la disminución de velocidad constante y progresiva de un disco o acercamiento peligroso y paulatino de las cabezas a la superficie del disco. Si bien el S.M.A.R.T. no soluciona ninguna avería, por lo menos pone sobre aviso al usuario para que tome las precauciones oportunas (¡algo es algo!). para que este sistema sea viable, además de disponer de un disco con estas características, la BIOS del sistema debe soportar el modo de trabajo S.M.A.R.T y tenerlo activo. NORMA ATA Debe su nombre a su aparición con los PC AT. En definitiva no es mas que otra denominación que se le da al bus IDE. Desde el original ATA que solo soportaba 2 dispositivos con una transferencia de 8,3 Mb/seg hasta el reciente ATA5 con transferencias de hasta 100 Mb/seg. El primer paso fue el Fast ATA, con 13,3 Mb y le sucedió el ATA2 , con transferencias de 16,6 y soporte LBA. La evolución de la norma se vio reflejada en el ATA3 que, además de mantener la ATA2, incluía utilidades de monitorización S.M.A.R.T. EL ultra ATA, ATA4, DMA 33 o el UltraDMA son diferentes denominaciones para cada sucesiva versión del bus que alcanza transferencias de 33,3 Mb/s. Por ultimo, el UltraDMA 66 y 100 que duplica y triplica respectivamente la transferencia y es la ultima aparición. En este caso las características físicas varían, ya que el cable usado para conectar el dispositivo con la controladora es de 40 hilos en lugar de los 40 habituales. El exceso de 40 hilos es usado para señales de masa, cuya misión es la de hacer mas inmune al ruido el bus, evitando interferencias. CHS, LBA Y LARGE La forma de definir las características de un disco duro ha sido históricamente indicar el numero de cilindros, cabezas y sectores (Cylinder, Head and Sector). Esta formula fue valida hasta alcanzar los 1024 cilindros, capacidad máxima de direccionamiento en un disco duro, estableciendo el limite de capacidad de los mismos en 504 Mb. Capacidad = Cilindros * Cabezas * Sectores * Capacidad sector 1024 * 16 * 512 bytes = 504 Mb La primera solución para poder trabajar con discos duros de capacidad superior vino dad por el LBA (Logical Block Addressing), un método de direccionamiento lógico por bloques por el que, para acceder a una zona determinada del disco, no era preciso especificar la cabeza, el cilindro y el sector. En esta modalidad los sectores se numeran consecutivamente y basta con indicar el numero de sector al que se desea acceder mediante un numero de 28 bits manejable por el sistema operativo. La ultima variación de acceso ha sido el método popularmente conocido como “large”, aunque su denominación real es ECHS (Extended CHS). Por este sistema se generan una serie de parámetros (cabezas, cilindros y sectores) ficticios que, si bien no
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
42
se corresponden con la realidad física del disco, sirven para realizar una conversión geométrica y poder acceder a la totalidad del disco. LIMITE 504 MB: DESCOORDINACION ENTRE NORMAS El limite de los 504 Mb no es una falta de previsión de crecimiento, sino, un fallo de relación entre dos normativas implicadas: las restricciones IDE/ATA y la BIOS. El problema se encuentra en que dichos parámetros se incrementan de forma independiente en cada norma. Así, el IDE limita los sectores, cabezas y cilindros a 256, 16 y 65536 respectivamente mientras la BIOS lo hace en 63, 256 y 1024. a efectos reales, es preciso adoptar los valores mínimos de cada normativa, es decir 63, 16 y 1024. el resultado es un disco de 504 Mb.
Cilindros Cabezas Sectores Capacidad (Gb) BIOS 1024 256 63 7,88 IDE 65536 16 256 128
PREPARACION: ASIGNACION Y FORM ATO Antes de comenzar a trabajar con un disco duro es preciso crear particiones sobre el mismo (FDISK) y dar formato a dichas particiones (FORMAT). Una vez dentro del entorno FDISK, todas las operaciones serán guiadas por menú. Básicamente permite crear una partición primaria y si se desea una partición extendida. Se incluye también en este menú la opción de visualizar información del estado de las particiones. Dos opciones mas aparecen: establecer partición activa y cambiar de unidad. La primera permite definir con que unidad lógica se desea arrancar el sistema, mientras que la segunda permite el cambio a otro disco duro si es que existiese. La asignación de unidades se realizara comenzando por C: y avanzando por el abecedario por las particiones. De for ma automática, si solo hay una partición, FDISK la asigna como activa. Una vez realizada la partición o particiones deseadas, será preciso reiniciar la maquina y, posteriormente, hacer un formateo de la unidad con la orden FORMAT, repitiendo este proceso t antas veces como unidades se hayan creado con FDISK. LECTOR DE CD-ROM UNIDADES DE CD-ROM En poco difiere un CD-ROM de un disco duro convencional o cualquier otro dispositivo de almacenamiento basado en un disco físico que gira. En este caso la parte mecánica es muy similar a cualquier otro dispositivo, matizando, como no, el proceso exclusivo de lectura que, en este caso y a diferencia de lo que suele ser común en le PC, no es magnético sino óptico. El concepto es muy sencillo: Un diodo láser de infrarrojos emite un rayo de luz contra un pequeño espejo móvil. Dicho espejo forma parte de la cabeza y es el encargado de moverse y direccional toda la superficie del disco. De este modo se consigue la “estabilidad” del diodo. El rayo reflejado se hace incidir sobre la superficie de la unidad CD-ROM, accediendo a un punto concreto del mismo que, en función de la información grabada, devolverá un flujo de luz concreto. A través de diferentes lentes, espejos y colectores, se recogerá la luz y se ara llegar a un fotodetector, cuya misión será la de convertir los
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
43
impulsos luminosos en impulsos eléctricos para su posterior tratamiento como información digital. UNIDADES CD-R Las unidades CD-R o simplemente grabadoras de CD, están en pleno auge tras alcanzar precios muy competitivos. En le proceso de lectura, funcionan igual que cualquier unidad lectora. Los CD-R reemplazan los puntos físicos moldeados en la superficie del disco que usan los discos compactos convencionales por unas marcas, similares a una fina capa de tinte sensible, lo que les permite realizar grabaciones pero no “regrabaciones” sobre un mismo medio UNIDADES CD-RW Los discos CD-RW reemplazan el tinte usado por los CD-R con una capa especial que admite el cambio de fase en el proceso de grabación, formada por compuestos químicos y que le confiere la propiedad de poder cambiar su estado cuando se le aplica energía. LA CABEZA LECTORA Y SU MOVIMIENTO El concepto de cabeza en los discos compactos difiere respecto a los discos duros aunque, en algunos aspectos mecánicos, se mantiene una cierta similitud. El movimiento de la lente se realiza a través de un carril que recorre el CD de manera radial, como si se tratase de una disquetera. Este movimiento es gobernado por un servomotor que, a su vez, se gestiona desde un microcontrolador. EL MOTOR DE ROTACIÓN Una de las diferencias más notables entre las unidades de CD y otras de almacenamiento magnético hace referencia al motor de rotación. La problemática planteada en otros dispositivos es la variación de velocidad en las diferentes zonas del disco. Puesto que en discos duros la velocidad angular es constante, es la velocidad lineal la que varia según el punto del disco al que se esté accediendo. En los discos compactos esto cambia. Los motores están diseñados de tal forma que la velocidad se ajusta a la zona del disco a leer, consiguiendo mantener una velocidad lineal constante y, como consecuencia, una velocidad angular variable. Este es el motivo por el que no se da como característica en una unidad de CD-ROM la velocidad de rotación, sino la tasa de transferencia. así, un lector básico de 1x consigue velocidades de rotación comprendidas entre 210 y 539 r.p.m. para mantener la tasa de transferencia de 150Kb/s. MECANISMO DE CARGA DE LAS UNIDADES DE CD
• Bandeja. Es el sistema mas utilizado. Se trata de una pequeña bandeja de plástico que se gestiona mediante la pulsación de un botón serigrafiado como “Eject”. Al pulsar dicho botón, se consigue extraer la bandeja, y si se vuelve a pulsar la bandeja retorna a su posición original dentro de la unidad. El problema de las bandejas es su fragilidad. Deben manejarse con cuidado y asegurarse antes de la introducción del disco que éste se encuentra correctamente asentado en la bandeja; en caso contrario se puede dañar el CD. Algunas bandejas disponen de cuatro lengüetas móviles que permiten la fijación del disco a la unidad, posibilitando de esta forma el trabajo en vertical.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
44
• Slot In. Este es el nombre que recibe otro sistema de inserción del disco. Habitualmente usado pro la marca PIONEER, no habilita ningún dispositivo mecánico externo sino que la introducción se realiza mediante la inserción del CD dentro de la ranura de la unidad. Al pulsar el botón de eject, la unidad de CD-ROM devuelve el disco al exterior.
DVD Digital Versatile/Video Disk, es probablemente el soporte del futuro. Se trata de
un medio, igual en su aspecto a un CD.ROM convencional pero con muchas mas prestaciones. Con varios Gygabytes de capacidad, elimina el problema de almacenamiento que, en muchas aplicaciones, se ha quedado pequeño con el CD-ROM. Soporta, por supuesto, video digital y cualquier tipo de información que tenga que ver con el entorno digital. CONEXIÓN FÍSICA DE LAS UNIDADES DE CD Existe una gran similitud entre la conexión de unidades de Cd y unidades de disco duro. Para las unidades IDE, la única precaución será establecer si se trabajara en modo 2master” o “slave” mientras en los dispositivos SCSI habrá que asignar un numero único dentro de la red de dispositivos. TARJETAS GRAFICAS O DE VIDEO Se trata de uno de los componentes principales del PC. Dado que el monitor es el medio por excelencia de comunicación maquina -usuario. En cuanto a su conexión física, la tarjeta de video puede ir en una ranura mas como cualquier otra; aunque existen ranuras dedicadas tal fin: AGP. CLASES DE TARJETAS DE VIDEO MDA Monochrome Display Adapter. Fue lanzada por IBM con una memoria de 4Kb de forma exclusiva para los monitores TTL. No disponía de gráficos y su única resolución era la presentada en modo texto (80 x 25) en caracteres de 14 x 9 puntos, sin ninguna posibilidad de configuración CGA Color Graphics Array. Aparece en el año 1981 también de la mano de IBM y fue muy extendida. Permitía matrices de caracteres de 8 x 8 puntos en pantallas de 25 filas y 80 columnas. En modo grafico admitía resoluciones de hasta 640 x 200 HGC Hercules Graphics Card. Aparece en el año 1982, con gran éxito convirtiéndose en un estándar de video a pesar de no disponer del soporte de las rutinas BIOS por parte de IBM. Su resolución era 720 x 384 puntos en monocromo con 64 Kb de memoria. EGA Enhaced Graphics Adapter. Fue diseñada por IBM en 1984 e implementada es sus primeros AT. Acepta memoria de 256 Kb con la que obtiene resoluciones de 640 x 350 y 640 x 200. el color se formaba con cuatro bits dando lugar a 16 combinaciones diferentes. Como novedad esta tarjeta incluye una BIOS propia independiente de la del sistema donde se incluyen todas las rutinas de video precisas.
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
45
MCGA Memory Controller Gate Array. Se comportan en modo texto con 25 filas y 80 columnas con una paleta de 16 colores, seleccionables de un total de 262144. en modo grafico admiten 640 x 480 /1 color, 0 320 x 200 / colores. Fue la primera tarjeta que envió al monitor una señal ana lógica en lugar del formato digital. Esto abre el abanico de posibilidades de representación de color, al no existir un limite como ocurría con el resto, hasta ese momento los colores conseguidos consistían en la aplicación del popular RGB (Red, Green y Blue) además de un nivel de intensidad en cada caso. La ausencia o presencia de cada color con su intensidad da lugar a la paleta de colores máxima y finita de este tipo de tarjetas. Al usar señales de tipo analógico, se disparan las posibilidades de colores y brillos. VGA Video Graphics Adapter. Aparece en 1987 con una resolución de 640 x 480 en modo grafico representando 256 colores con una paleta de 262.144 y de 720 x 400 puntos en modo texto. Dispone de 256 Kb de memoria mínima aunque con esa memoria solo alcanza resoluciones de 320 x 200 por lo que se ampliaban a 512 Kb, 1 o 2 M. SVGA Súper VGA. Permite resoluciones de hasta 1280 x 1024 y hasta 16,7 millones de colores, aunque estos se pueden superar según la memoria instalada. ACELERADORES Consisten en un chip incluido en las tarjetas de video. Consiguen aliviar al microprocesador de trabajo gracias a la implementación de diferentes rutinas de video en el propio chip. Dicho de otra forma: “saben” realizar determinadas funciones graficas, por lo que no precisan de la presencia del micro ni consumir, por tanto, ningún ciclo de maquina. Las funciones que realizan son las de transferencias de bits, desplazamiento de determinadas áreas a través de la pantalla, coloreado de rectángulos y trazados de líneas. usan transferencias por bloque de bits para realizar sus operaciones. El resto de las tareas graficas son las que la CPU debe realizar. Son de alto rendimiento en Windows. LA CONVERSIÓN DIGITAL ANALÓGICA Debe tenerse también en cuenta la velocidad del dispositivo encargado de convertir los datos digitales de color que genera la tarjeta de video a las señales analógicas que “entiende” el monitor en sus tres colores básicos. Este dispositivo recibe el nombre de RAMDAC (Random Acces Memory Digital to Analog Converter). La calidad de este dispositivo ira en función de su ancho de banda según la formula: Ancho de banda (Mhz) = Pixeles (x) * Pixeles (y) * Frecuencia de refresco * 1,5. LA MEMORIA DE VIDEO
• DRAM. Es la misma memoria que se usa en las placas base. Su función dentro de la tarjeta de video es la de recibir o enviar datos sirviendo de puente entre la CPU y el RAMDAC
• VRAM . A diferencia de la DRAM, permite leer y escribir al tiempo mediante dos canales independientes. Esto agiliza la gestión de video evitando parpadeos molestos.

SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
46
• WRAM. Desarrollada por SAMSUNG y orientada a la gestión de Windows. Al igual que la VRAM permite el uso de dos canales pero es un 25% mas rápida en el proceso
• SGRAM . Es la denominada “Synchronous graphics RAM”, usada de forma exclusiva por las tarjetas de video de calidad. Esta memoria proporciona un gran ancho de banda y es la memoria indicada para trabajar con aceleradores gráficos.
TARJETAS 3D
En marzo de 1998 INTEL lanzó su chip de aceleración 3D con el nombre de INTEL 740, pensado para PENTIUM II con tecnología AGP. Este tipo de placas están diseñadas para aplicaciones concretas donde se precise video multimedia, animaciones, etc. No solo INTEL se ha encargado de este desarrollo. Existen tarjetas de otras marcas que usan dos microprocesadores diferentes en la misma tarjeta a la vez de incluir memoria diferenciada para pantalla y para los procesos gráficos de ambos micros. En la actualidad el fabricante “puntero” en tarjetas 3D es NVIDIA, otros fabricantes importantes son: ATI, MATROX que fabrican sus propios procesadores gráficos otras empresas montan sus chips como: CREATIVE, DIAMOND o GUILLEMOT.
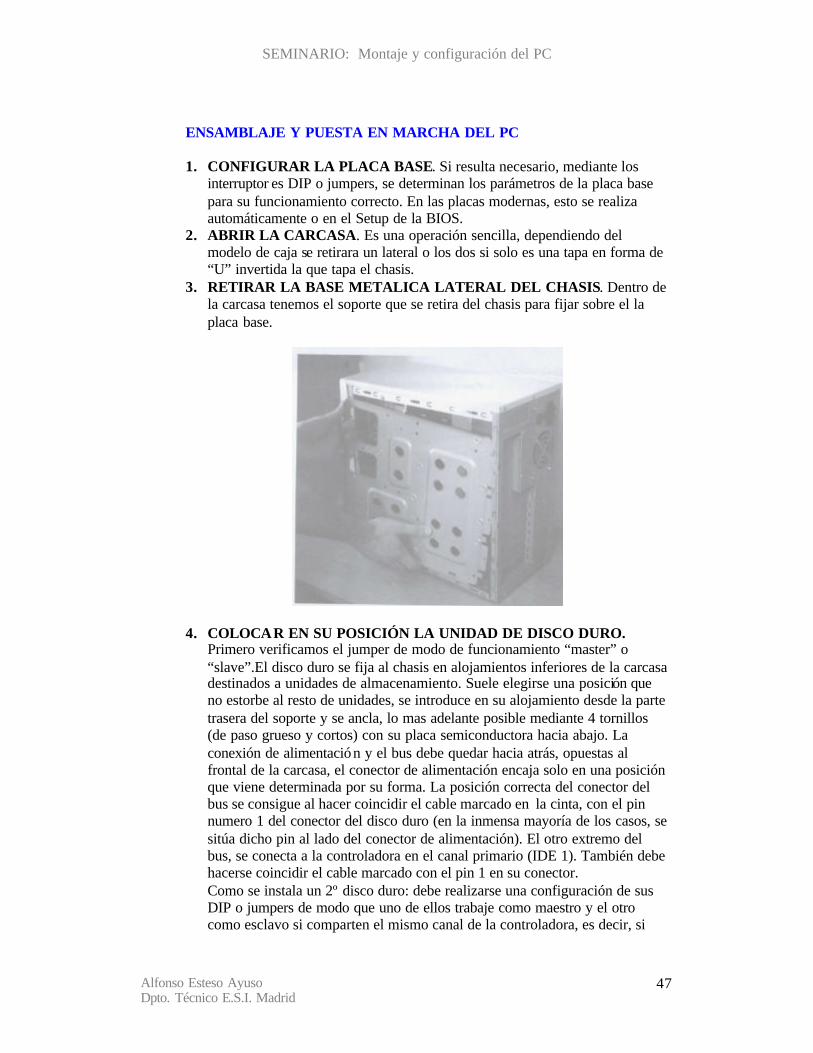
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
47
ENSAMBLAJE Y PUESTA EN MARCHA DEL PC
1. CONFIGURAR LA PLACA BASE. Si resulta necesario, mediante los interruptor es DIP o jumpers, se determinan los parámetros de la placa base para su funcionamiento correcto. En las placas modernas, esto se realiza automáticamente o en el Setup de la BIOS.
2. ABRIR LA CARCASA. Es una operación sencilla, dependiendo del modelo de caja se retirara un lateral o los dos si solo es una tapa en forma de “U” invertida la que tapa el chasis.
3. RETIRAR LA BASE METALICA LATERAL DEL CHASIS. Dentro de la carcasa tenemos el soporte que se retira del chasis para fijar sobre el la placa base.
4. COLOCAR EN SU POSICIÓN LA UNIDAD DE DISCO DURO.
Primero verificamos el jumper de modo de funcionamiento “master” o “slave”.El disco duro se fija al chasis en alojamientos inferiores de la carcasa destinados a unidades de almacenamiento. Suele elegirse una posición que no estorbe al resto de unidades, se introduce en su alojamiento desde la parte trasera del soporte y se ancla, lo mas adelante posible mediante 4 tornillos (de paso grueso y cortos) con su placa semiconductora hacia abajo. La conexión de alimentación y el bus debe quedar hacia atrás, opuestas al frontal de la carcasa, el conector de alimentación encaja solo en una posición que viene determinada por su forma. La posición correcta del conector del bus se consigue al hacer coincidir el cable marcado en la cinta, con el pin numero 1 del conector del disco duro (en la inmensa mayoría de los casos, se sitúa dicho pin al lado del conector de alimentación). El otro extremo del bus, se conecta a la controladora en el canal primario (IDE 1). También debe hacerse coincidir el cable marcado con el pin 1 en su conector. Como se instala un 2º disco duro: debe realizarse una configuración de sus DIP o jumpers de modo que uno de ellos trabaje como maestro y el otro como esclavo si comparten el mismo canal de la controladora, es decir, si
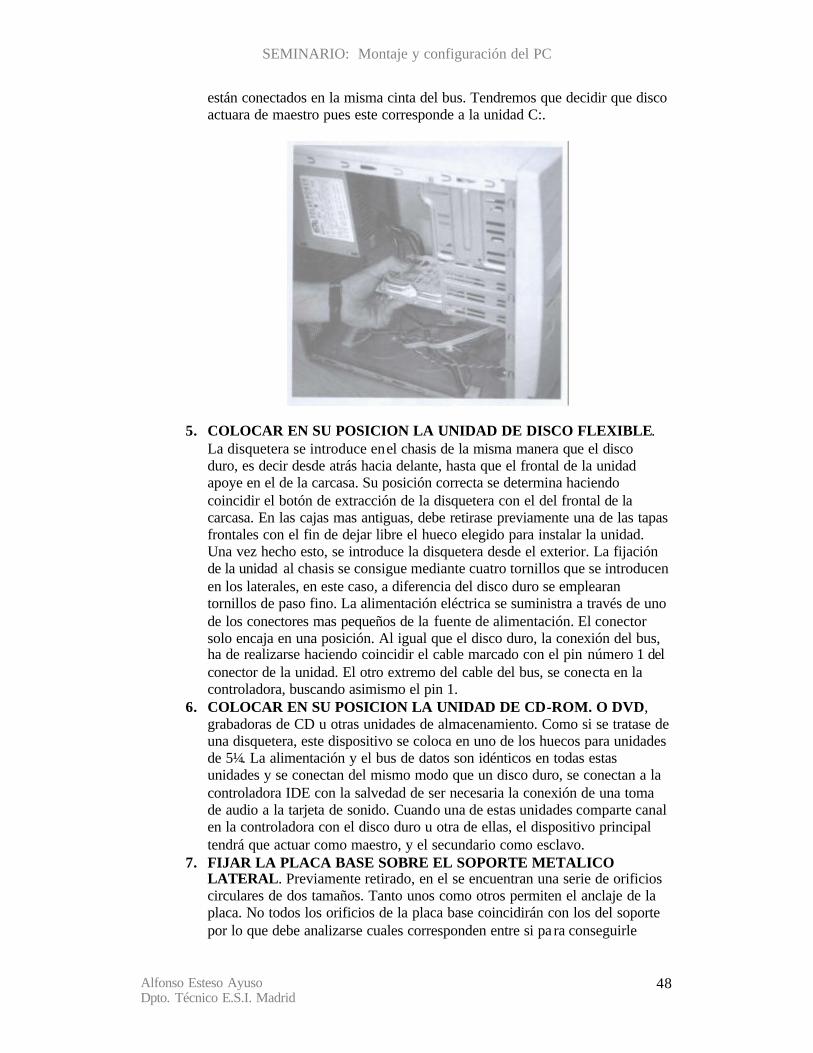
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
48
están conectados en la misma cinta del bus. Tendremos que decidir que disco actuara de maestro pues este corresponde a la unidad C:.
5. COLOCAR EN SU POSICION LA UNIDAD DE DISCO FLEXIBLE.
La disquetera se introduce en el chasis de la misma manera que el disco duro, es decir desde atrás hacia delante, hasta que el frontal de la unidad apoye en el de la carcasa. Su posición correcta se determina haciendo coincidir el botón de extracción de la disquetera con el del frontal de la carcasa. En las cajas mas antiguas, debe retirase previamente una de las tapas frontales con el fin de dejar libre el hueco elegido para instalar la unidad. Una vez hecho esto, se introduce la disquetera desde el exterior. La fijación de la unidad al chasis se consigue mediante cuatro tornillos que se introducen en los laterales, en este caso, a diferencia del disco duro se emplearan tornillos de paso fino. La alimentación eléctrica se suministra a través de uno de los conectores mas pequeños de la fuente de alimentación. El conector solo encaja en una posición. Al igual que el disco duro, la conexión del bus, ha de realizarse haciendo coincidir el cable marcado con el pin número 1 del conector de la unidad. El otro extremo del cable del bus, se conecta en la controladora, buscando asimismo el pin 1.
6. COLOCAR EN SU POSICION LA UNIDAD DE CD-ROM. O DVD, grabadoras de CD u otras unidades de almacenamiento. Como si se tratase de una disquetera, este dispositivo se coloca en uno de los huecos para unidades de 5¼. La alimentación y el bus de datos son idénticos en todas estas unidades y se conectan del mismo modo que un disco duro, se conectan a la controladora IDE con la salvedad de ser necesaria la conexión de una toma de audio a la tarjeta de sonido. Cuando una de estas unidades comparte canal en la controladora con el disco duro u otra de ellas, el dispositivo principal tendrá que actuar como maestro, y el secundario como esclavo.
7. FIJAR LA PLACA BASE SOBRE EL SOPORTE METALICO LATERAL. Previamente retirado, en el se encuentran una serie de orificios circulares de dos tamaños. Tanto unos como otros permiten el anclaje de la placa. No todos los orificios de la placa base coincidirán con los del soporte por lo que debe analizarse cuales corresponden entre si pa ra conseguirle
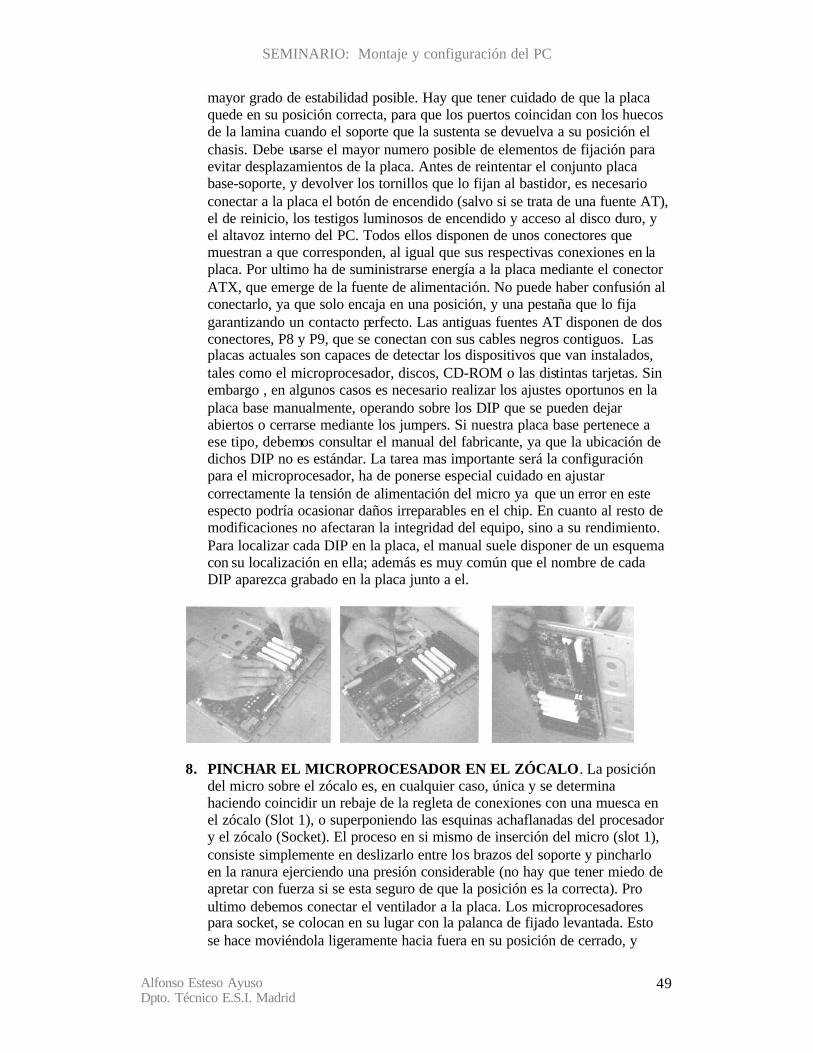
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
49
mayor grado de estabilidad posible. Hay que tener cuidado de que la placa quede en su posición correcta, para que los puertos coincidan con los huecos de la lamina cuando el soporte que la sustenta se devuelva a su posición el chasis. Debe usarse el mayor numero posible de elementos de fijación para evitar desplazamientos de la placa. Antes de reintentar el conjunto placa base-soporte, y devolver los tornillos que lo fijan al bastidor, es necesario conectar a la placa el botón de encendido (salvo si se trata de una fuente AT), el de reinicio, los testigos luminosos de encendido y acceso al disco duro, y el altavoz interno del PC. Todos ellos disponen de unos conectores que muestran a que corresponden, al igual que sus respectivas conexiones en la placa. Por ultimo ha de suministrarse energía a la placa mediante el conector ATX, que emerge de la fuente de alimentación. No puede haber confusión al conectarlo, ya que solo encaja en una posición, y una pestaña que lo fija garantizando un contacto perfecto. Las antiguas fuentes AT disponen de dos conectores, P8 y P9, que se conectan con sus cables negros contiguos. Las placas actuales son capaces de detectar los dispositivos que van instalados, tales como el microprocesador, discos, CD-ROM o las distintas tarjetas. Sin embargo , en algunos casos es necesario realizar los ajustes oportunos en la placa base manualmente, operando sobre los DIP que se pueden dejar abiertos o cerrarse mediante los jumpers. Si nuestra placa base pertenece a ese tipo, debemos consultar el manual del fabricante, ya que la ubicación de dichos DIP no es estándar. La tarea mas importante será la configuración para el microprocesador, ha de ponerse especial cuidado en ajustar correctamente la tensión de alimentación del micro ya que un error en este especto podría ocasionar daños irreparables en el chip. En cuanto al resto de modificaciones no afectaran la integridad del equipo, sino a su rendimiento. Para localizar cada DIP en la placa, el manual suele disponer de un esquema con su localización en ella; además es muy común que el nombre de cada DIP aparezca grabado en la placa junto a el.
8. PINCHAR EL MICROPROCESADOR EN EL ZÓCALO. La posición
del micro sobre el zócalo es, en cualquier caso, única y se determina haciendo coincidir un rebaje de la regleta de conexiones con una muesca en el zócalo (Slot 1), o superponiendo las esquinas achaflanadas del procesador y el zócalo (Socket). El proceso en si mismo de inserción del micro (slot 1), consiste simplemente en deslizarlo entre los brazos del soporte y pincharlo en la ranura ejerciendo una presión considerable (no hay que tener miedo de apretar con fuerza si se esta seguro de que la posición es la correcta). Pro ultimo debemos conectar el ventilador a la placa. Los microprocesadores para socket, se colocan en su lugar con la palanca de fijado levantada. Esto se hace moviéndola ligeramente hacia fuera en su posición de cerrado, y
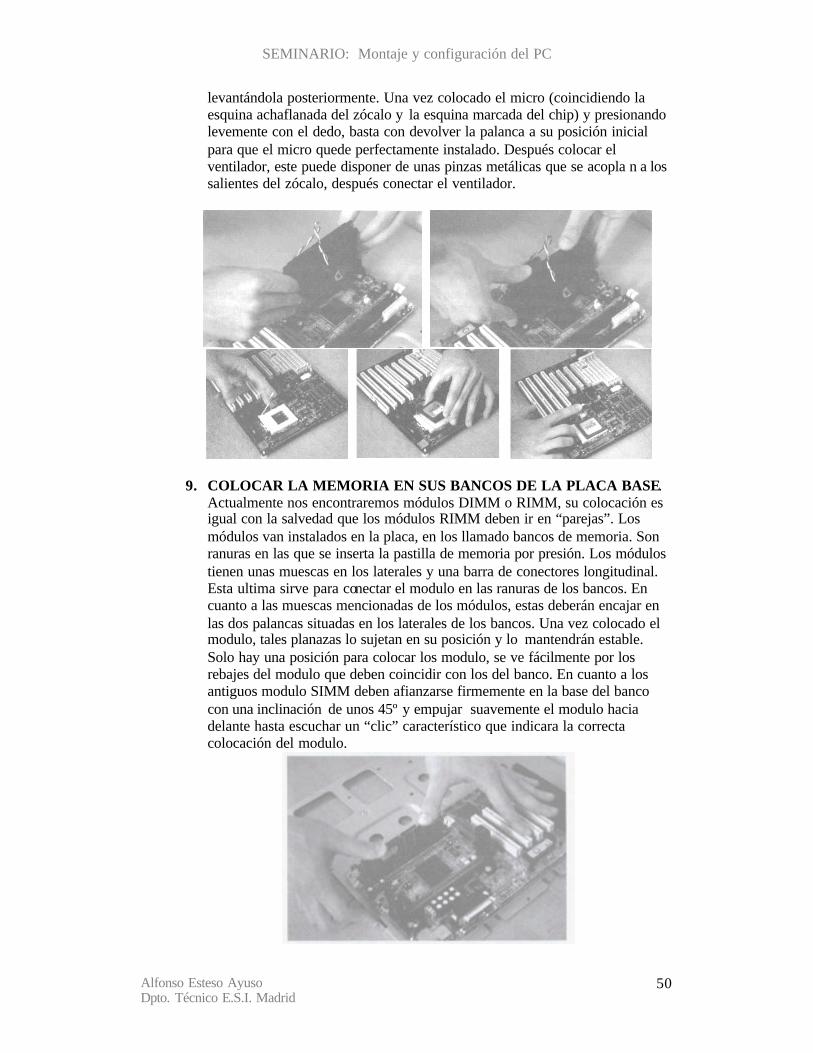
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
50
levantándola posteriormente. Una vez colocado el micro (coincidiendo la esquina achaflanada del zócalo y la esquina marcada del chip) y presionando levemente con el dedo, basta con devolver la palanca a su posición inicial para que el micro quede perfectamente instalado. Después colocar el ventilador, este puede disponer de unas pinzas metálicas que se acopla n a los salientes del zócalo, después conectar el ventilador.
9. COLOCAR LA MEMORIA EN SUS BANCOS DE LA PLACA BASE.
Actualmente nos encontraremos módulos DIMM o RIMM, su colocación es igual con la salvedad que los módulos RIMM deben ir en “parejas”. Los módulos van instalados en la placa, en los llamado bancos de memoria. Son ranuras en las que se inserta la pastilla de memoria por presión. Los módulos tienen unas muescas en los laterales y una barra de conectores longitudinal. Esta ultima sirve para conectar el modulo en las ranuras de los bancos. En cuanto a las muescas mencionadas de los módulos, estas deberán encajar en las dos palancas situadas en los laterales de los bancos. Una vez colocado el modulo, tales planazas lo sujetan en su posición y lo mantendrán estable. Solo hay una posición para colocar los modulo, se ve fácilmente por los rebajes del modulo que deben coincidir con los del banco. En cuanto a los antiguos modulo SIMM deben afianzarse firmemente en la base del banco con una inclinación de unos 45º y empujar suavemente el modulo hacia delante hasta escuchar un “clic” característico que indicara la correcta colocación del modulo.
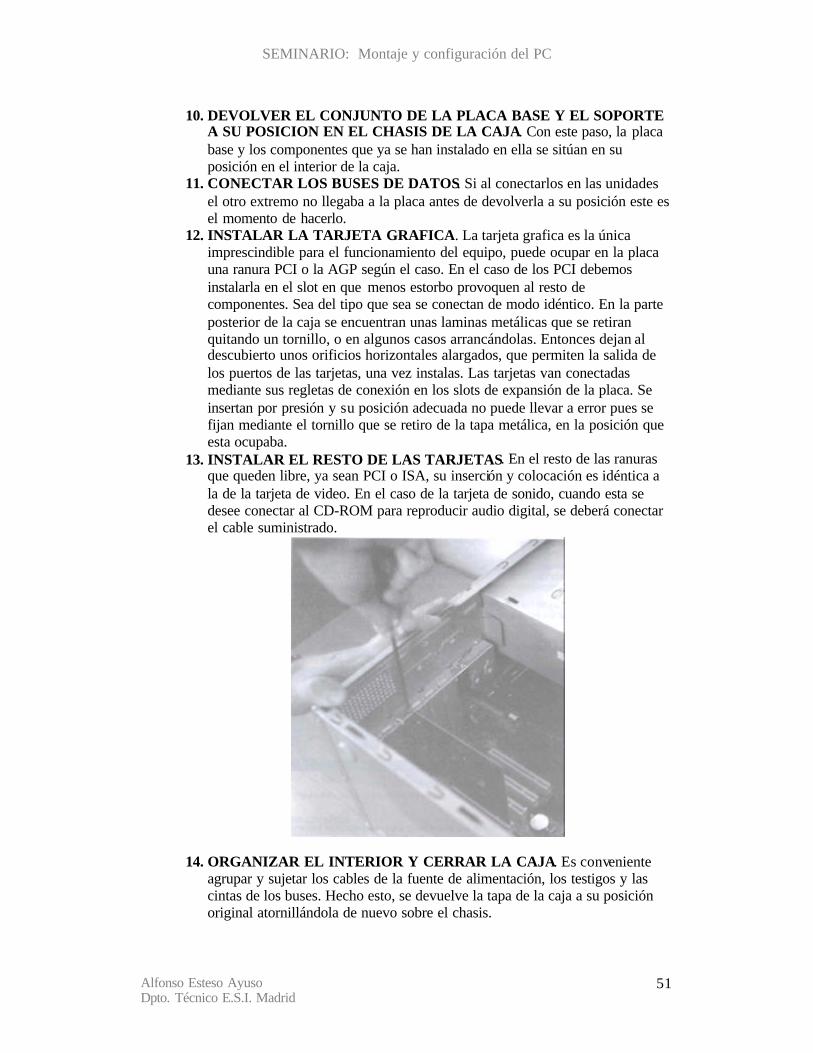
SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
51
10. DEVOLVER EL CONJUNTO DE LA PLACA BASE Y EL SOPORTE
A SU POSICION EN EL CHASIS DE LA CAJA. Con este paso, la placa base y los componentes que ya se han instalado en ella se sitúan en su posición en el interior de la caja.
11. CONECTAR LOS BUSES DE DATOS. Si al conectarlos en las unidades el otro extremo no llegaba a la placa antes de devolverla a su posición este es el momento de hacerlo.
12. INSTALAR LA TARJETA GRAFICA. La tarjeta grafica es la única imprescindible para el funcionamiento del equipo, puede ocupar en la placa una ranura PCI o la AGP según el caso. En el caso de los PCI debemos instalarla en el slot en que menos estorbo provoquen al resto de componentes. Sea del tipo que sea se conectan de modo idéntico. En la parte posterior de la caja se encuentran unas laminas metálicas que se retiran quitando un tornillo, o en algunos casos arrancándolas. Entonces dejan al descubierto unos orificios horizontales alargados, que permiten la salida de los puertos de las tarjetas, una vez instalas. Las tarjetas van conectadas mediante sus regletas de conexión en los slots de expansión de la placa. Se insertan por presión y su posición adecuada no puede llevar a error pues se fijan mediante el tornillo que se retiro de la tapa metálica, en la posición que esta ocupaba.
13. INSTALAR EL RESTO DE LAS TARJETAS. En el resto de las ranuras que queden libre, ya sean PCI o ISA, su inserción y colocación es idéntica a la de la tarjeta de video. En el caso de la tarjeta de sonido, cuando esta se desee conectar al CD-ROM para reproducir audio digital, se deberá conectar el cable suministrado.
14. ORGANIZAR EL INTERIOR Y CERRAR LA CAJA. Es conveniente
agrupar y sujetar los cables de la fuente de alimentación, los testigos y las cintas de los buses. Hecho esto, se devuelve la tapa de la caja a su posición original atornillándola de nuevo sobre el chasis.

SEMINARIO: Montaje y configuración del PC
Alfonso Esteso Ayuso Dpto. Técnico E.S.I. Madrid
52
15. CONECTAR LOS PERIFERICOS. En la parte trasera reencuentran todos los conectores para el teclado, el monitor, el ratón, la impresora, etc. El teclado: basta con conectar su cable al conector de la placa a través del orificio trasero de la caja, puede ser DIN, miniDIN (PS/2) o USB, el ratón: es posible elegir su conexión a cualquier puerto serie, PS/2 o al USB. El monitor: en cuanto a su alimentación, puede hacerse directamente a la red eléctrica como a través de la fuente de alimentación de la caja (cuando ésta disponga de la salida adecuada), la fuente de video se suministra conectando el monitor al conector de la tarjeta grafica. Su forma admite una única posición de conexión. Impresora y Escáner: la mayoría se conectan al puerto paralelo, aunque se impone cada vez mas el USB, en el caso del cable paralelo de la impresora, los dos extremos son distintos, el que se conecta al equipo y el que se conecta a la impresora, que se fija a su conector mediante dos pestañas metálicas en el lateral de este. En el caso del escáner, el cable paralelo si tiene los dos conectores iguales, además, suelen disponer de dos tomas en su parte trasera, cuya función es conectarlos con el puerto paralelo y servir de “ladrón” automático a la impresora (u otro dispositivo paralelo, como unidades ZIP). Altavoces, micrófono y dispositivos de juego: estos elementos pueden considerarse como unas extensiones de la tarjeta del sonido. Tanto los altavoces, cascos o el micrófono se conectan mediante clavijas “jack” estándar en la parte posterior de dicho dispositivo. Usualmente la tar jeta de sonido dispone, además, de un puerto para dispositivos de juego o instrumentos MIDI. Este se utiliza para conectar joysticks, gamepads, sintetizadores o guitarras MIDI. Si disponemos de MODEM habrá que conectarle el cable de la línea telefónica y si disponemos de una tarjeta de red, su conector puede ser el RJ45, similar al de teléfono pero de 8 cables o BNC si el cable es coaxial, este se introduce en el conector de la tarjeta y se gira levemente en el sentido de las agujas del reloj, para que quede bien fijado.
16. CONFIGURACION DEL SETUP DE LA BIOS. Consiste en informar al grupo de programas de control del ordenador de las características de los dispositivos instalados. En la actualidad suele ser, en lo básico, autoconfigurable.
17. CARGA DEL SISTEMA OPERATIVO. Se prepara el disco duro para su uso (particionar y formatear) y se instalara el sistema operativo que vayamos a utilizar.
18. CARGA DE LOS DRIVERS. Los programas que controlan el funcionamiento de algunos dispositivos: Tarjetas graficas, de sonido, impresoras, etc.
En caso de que el montaje no sea completo, sino que solo deseamos modificar el ordenador o ampliarlo incluyendo alguna tarjeta o algún nuevo dispositivo, entonces el proceso debe ser el inverso, desconectando las piezas necesarias hasta lle gar a la que se desea cambiar, o conectarla directamente si es posible. Pro ejemplo, para cambiar la placa base deben desconectarse todos los dispositivos, pero no será necesario retirar las unidades de sus posiciones en el chasis; o en el caso de instalar una tarjeta nueva, lo mas probable es que no tengamos necesidad de desconectar ningún dispositivo.