Embed Size (px)
Citation preview
Universidad Politecnica de Madrid
Escuela Universitaria de Ingenierıa Tecnica Industrial
Practicas de Diseno de Maquinas
Por los Profesores:
M. Berzal Rubio
J.J. Narbon Prieto
C. Barajas Fernandez
Madrid, Curso 2.006-2.007
ALUMNO:
NUMERO DE MATRICULA:
GRUPO DE TEORIA:
GRUPO DE LABORATORIO:

. No se que cojones pasa con el cambio de hoja
Normas del Laboratorio:
1. Para aprobar la asignatura es necesaria la asistencia a todas las practicas
de laboratorio y la correcta realizacion de las mismas.
2. El alumno debe haber leıdo el guion de practicas antes de la realizacion de las
mismas.
3. Cualquier cambio de grupo debe ser autorizado por el profesor de laboratorio.
4. Se requiere estricta puntualidad en la entrada al laboratorio.
5. La toma de datos durante la practica se realizara en el propio cuaderno de laboratorio.
6. Para la correccion de las practicas se entregara el cuaderno d laboratorio en la
fecha indicada por el profesor.
7. Al finalizar la practica debe recogerse todo el material dejandolo como estaba
inicialmente.
8. Es necesario completar los datos personales que figuran en la portada
del cuaderno.
Practica 1:Caja de cambio Practica 2: Grupo Conico
Diferencial
Practica 3: Engranajes
Epicicloidales
Fecha: Fecha: Fecha:
Practica 4: Montaje Caja
de Cambio
Practica 5: Desmontaje
Caja de Cambio
Practica 6: Freno de
Tambor
Fecha: Fecha: Fecha:

4
Indice general
1. Caja de Cambio 7
1. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2. Caja de engranajes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3. Relacion de transmision . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1. 1er Cambio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2. 2o Cambio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.3. 3er Cambio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.4. Marcha Atras . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4. Experimentacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5. Toma de Datos y Resultados . . . . . . . . . . . . . . . . . . . . . . . . . 13
6. Graficos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
7. Cuestiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2. Grupo Conico Diferencial 17
8. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
9. Mecanismo Empleado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
10. Experimentacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
11. Toma de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
11.1. Lınea recta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
11.2. Rueda en el Aire . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
12. Graficos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
13. Cuestiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3. Engranajes Epicicloidales 23
14. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
15. Mecanismo de Engranajes Epicicloidales . . . . . . . . . . . . . . . . . . 23
16. Mecanismo Empleado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
17. Transmision Directa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5

6 INDICE GENERAL
18. Transmision Abierta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
19. Experimentacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
20. Toma de Datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
20.1. Transmision Directa . . . . . . . . . . . . . . . . . . . . . . . . . 29
20.2. Transmision Abierta . . . . . . . . . . . . . . . . . . . . . . . . . 29
21. Graficos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
22. Cuestiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4. Montaje y Desmontaje de la Caja de Cambios 33
23. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
24. Caja de Cambios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
25. Sincronizador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
26. Relacion de Colores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
27. Desmontaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
28. Montaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
29. Cuestiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5. Freno de Tambor 43
30. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
31. Freno de Tambor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
32. Mecanismo Empleado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
32.1. Palanca Traccionada . . . . . . . . . . . . . . . . . . . . . . . . . 45
32.2. Palanca Comprimida . . . . . . . . . . . . . . . . . . . . . . . . . 45
33. Experimentacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
33.1. Palanca Traccionada . . . . . . . . . . . . . . . . . . . . . . . . . 47
33.2. Palanca Comprimida . . . . . . . . . . . . . . . . . . . . . . . . . 47
33.3. Palanca Traccionada y Comprimida . . . . . . . . . . . . . . . . . 48
34. Toma de Datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
34.1. Palanca Traccionada . . . . . . . . . . . . . . . . . . . . . . . . . 49
34.2. Palanca Comprimida . . . . . . . . . . . . . . . . . . . . . . . . . 49
34.3. Palanca Traccionada y Comprimida . . . . . . . . . . . . . . . . . 49
35. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
36. Cuestiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
P.1Caja de Cambio
§ 1. Objetivos
Para un mecanismo representativo de una caja de velocidades de engranajes, la
presente practica persigue lo siguiente:
La observacion fısica del mecanismo que representa un arbol sencillo de reenvıo y
de marcha atras.
La determinacion de la correspondencia entre el momento torsor que obtenemos
en la salida de la caja y el momento torsor que, en cada relacion, tenemos que
suministrar para obtenerlo, venciendo, al mismo tiempo las perdidas por rozamiento.
§ 2. Caja de engranajes
La caja de velocidades consiste fundamentalmente en el acoplamiento de ruedas
dentadas de distintos tamanos que pueden funcionar engranando en el momento que se
desee. Este acoplamiento se realiza a traves de un arbol secundario de reenvıo y marcha
atras.
La mision fundamental de una caja de cambios es la utilizacion del par motor con
objeto de conseguir un mejor aprovechamiento de la energıa suministrada, ya en forma
de par ya en forma de velocidad angular.
La unidad esta formada por un mecanismo sencillo de arbol con ruedas dentadas
para la produccion de tres relaciones y marcha atras. Esta dotada de poleas ajustadas
7
8 § 2. Caja de engranajes
Figura 1.1: Ejemplo de caja de cambio.
en la prolongacion de los ejes de entrada y salida del mecanismo para producir los
momentos que nos permitiran determinar los esfuerzos producidos, permitiendo realizar
las experimentaciones indicadas en el primer apartado. Todos los ejes estan apoyados
en rodamientos con objeto de reducir las perdidas por rozamiento.
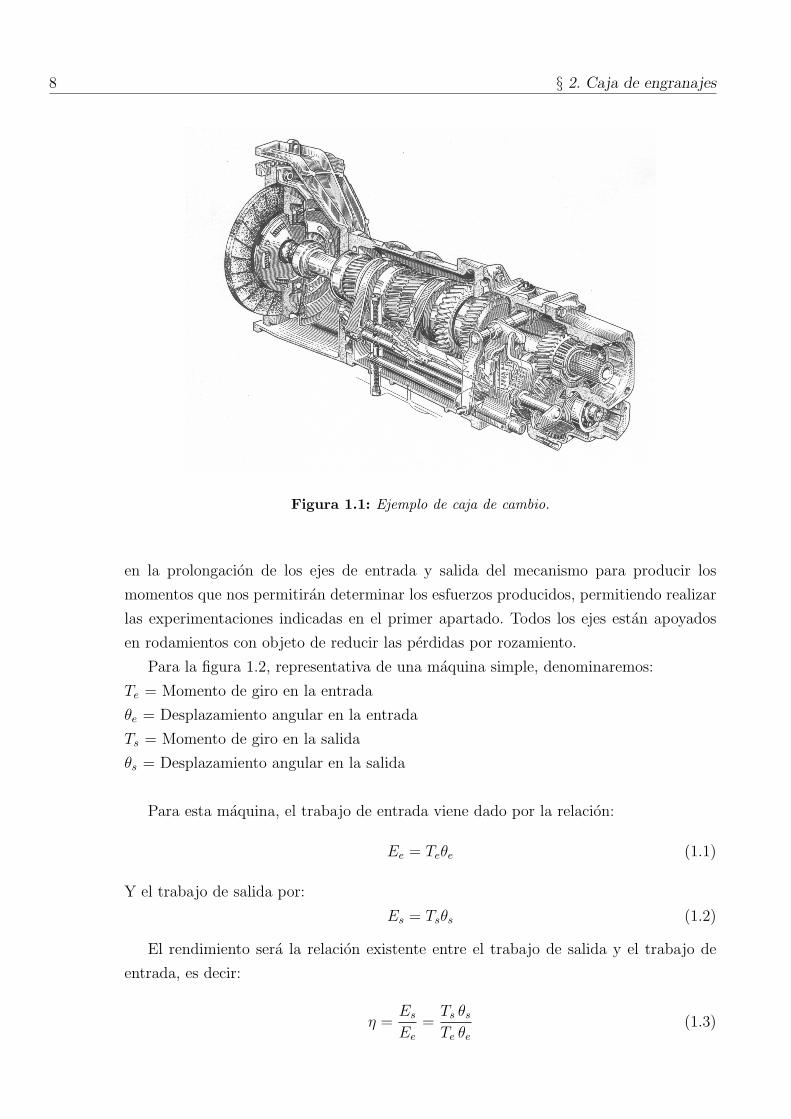
Para la figura 1.2, representativa de una maquina simple, denominaremos:
Te = Momento de giro en la entrada
θe = Desplazamiento angular en la entrada
Ts = Momento de giro en la salida
θs = Desplazamiento angular en la salida
Para esta maquina, el trabajo de entrada viene dado por la relacion:
Ee = Teθe (1.1)
Y el trabajo de salida por:
Es = Tsθs (1.2)
El rendimiento sera la relacion existente entre el trabajo de salida y el trabajo de
entrada, es decir:
η =Es
Ee
=Ts θs
Te θe
(1.3)
Caja de Cambio 9
Figura 1.2: Esquema de una caja de cambio.
§ 3. Relacion de transmision
La relacion de transmision es la relacion existente entre el desplazamiento angular
de la salida y el desplazamiento angular a la entrada es decir:
µ =θs
θe
(1.4)
ası pues, si conocemos la relacion de transmision y determinamos los momentos en
ambos extremos de la maquina, podremos calcular el trabajo realizado y el obtenido y,
por tanto, el rendimiento.
La relacion de transmision para las distintas marchas, se determina mediante el
cociente del producto del numero de dientes de las ruedas que transmiten movimiento
por el producto del numero de dientes de las ruedas cuyo movimiento se lo transmite
otra engranada a ella.
El numero de dientes para las distintas ruedas dentadas es el siguiente1:
A=F 20 dientes
B=E=H 30 dientes
C=D 40 dientes
G 14 dientes
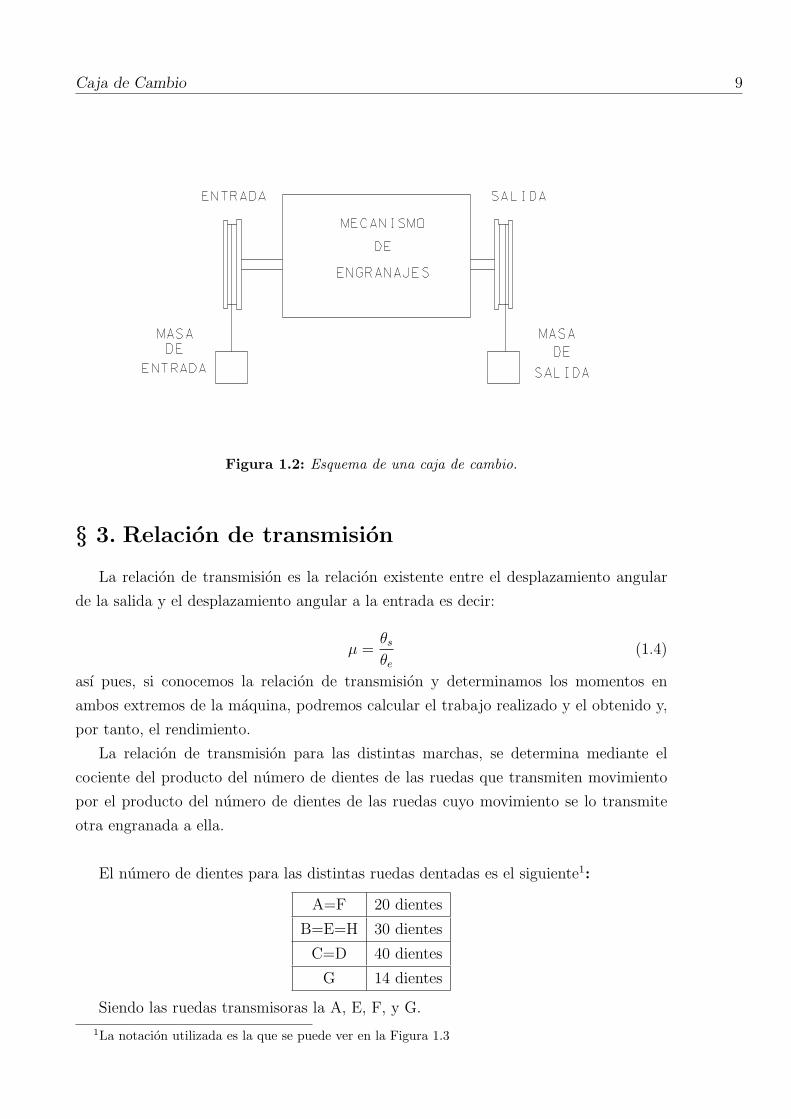
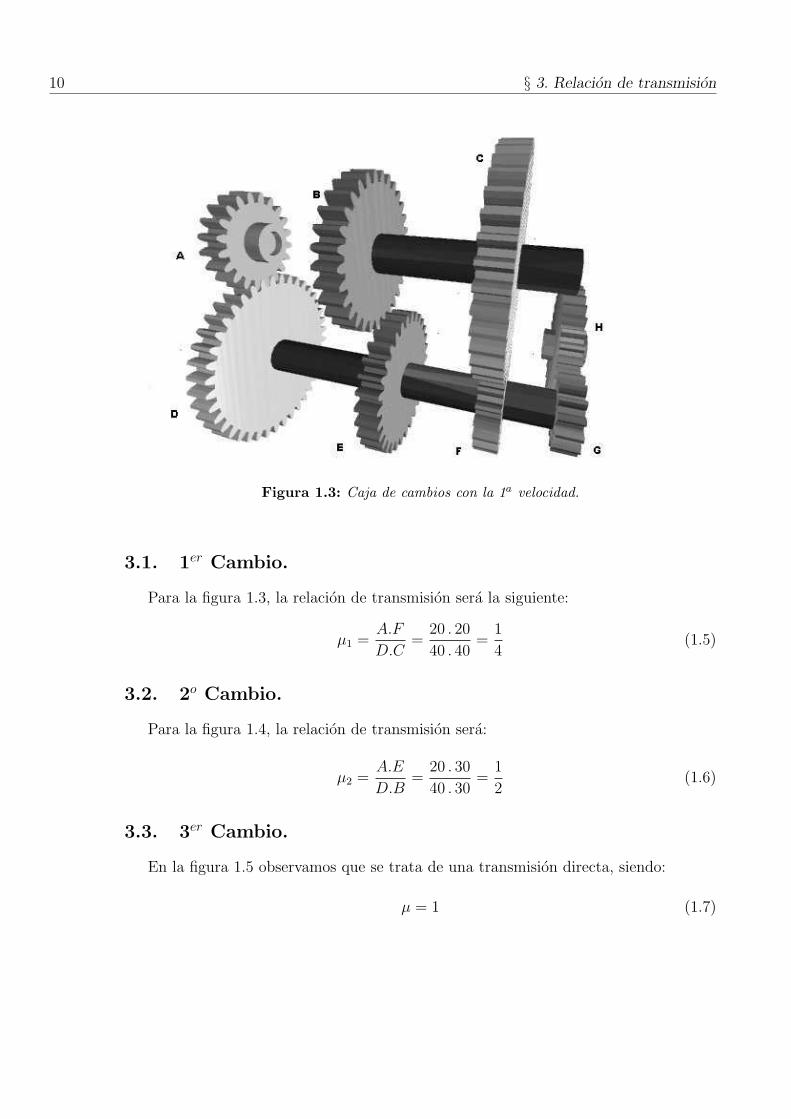
Siendo las ruedas transmisoras la A, E, F, y G.
1La notacion utilizada es la que se puede ver en la Figura 1.3
10 § 3. Relacion de transmision
Figura 1.3: Caja de cambios con la 1a velocidad.
3.1. 1er Cambio.
Para la figura 1.3, la relacion de transmision sera la siguiente:
µ1 =A.F
D.C=
20 . 20
40 . 40=
1
4(1.5)
3.2. 2o Cambio.
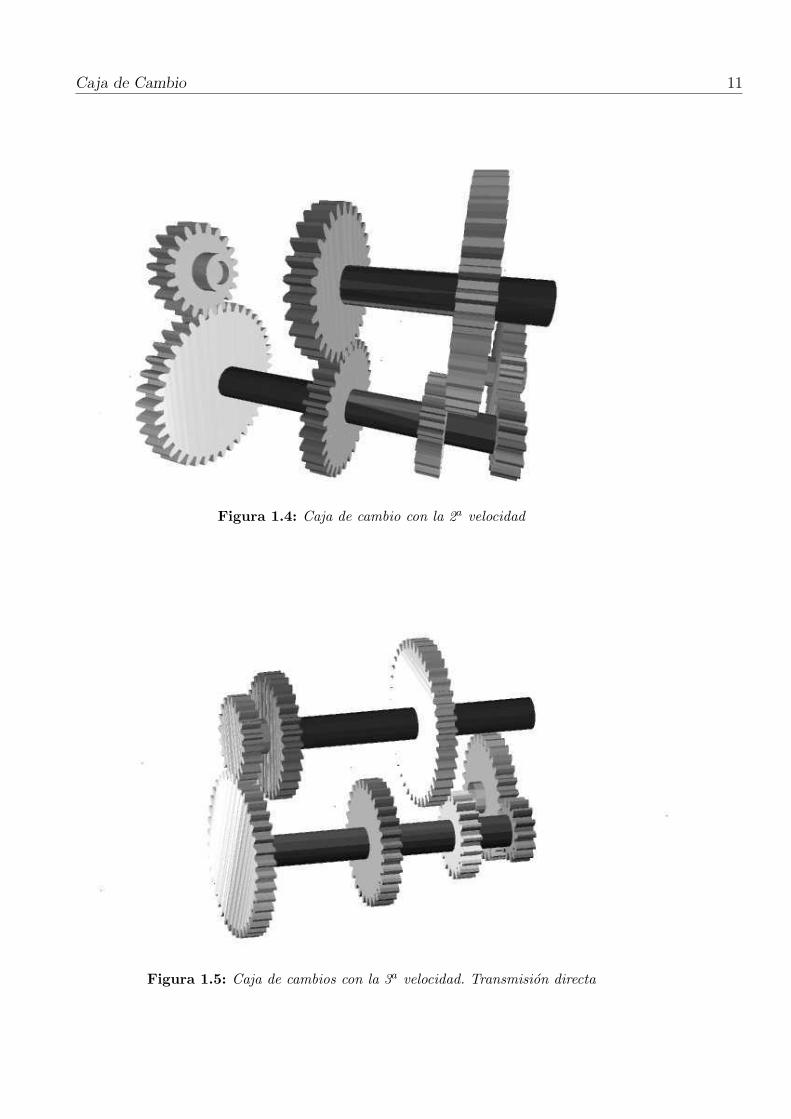
Para la figura 1.4, la relacion de transmision sera:
µ2 =A.E
D.B=
20 . 30
40 . 30=
1
2(1.6)
3.3. 3er Cambio.
En la figura 1.5 observamos que se trata de una transmision directa, siendo:
µ = 1 (1.7)
Caja de Cambio 11
Figura 1.4: Caja de cambio con la 2a velocidad
Figura 1.5: Caja de cambios con la 3a velocidad. Transmision directa
12 § 4. Experimentacion
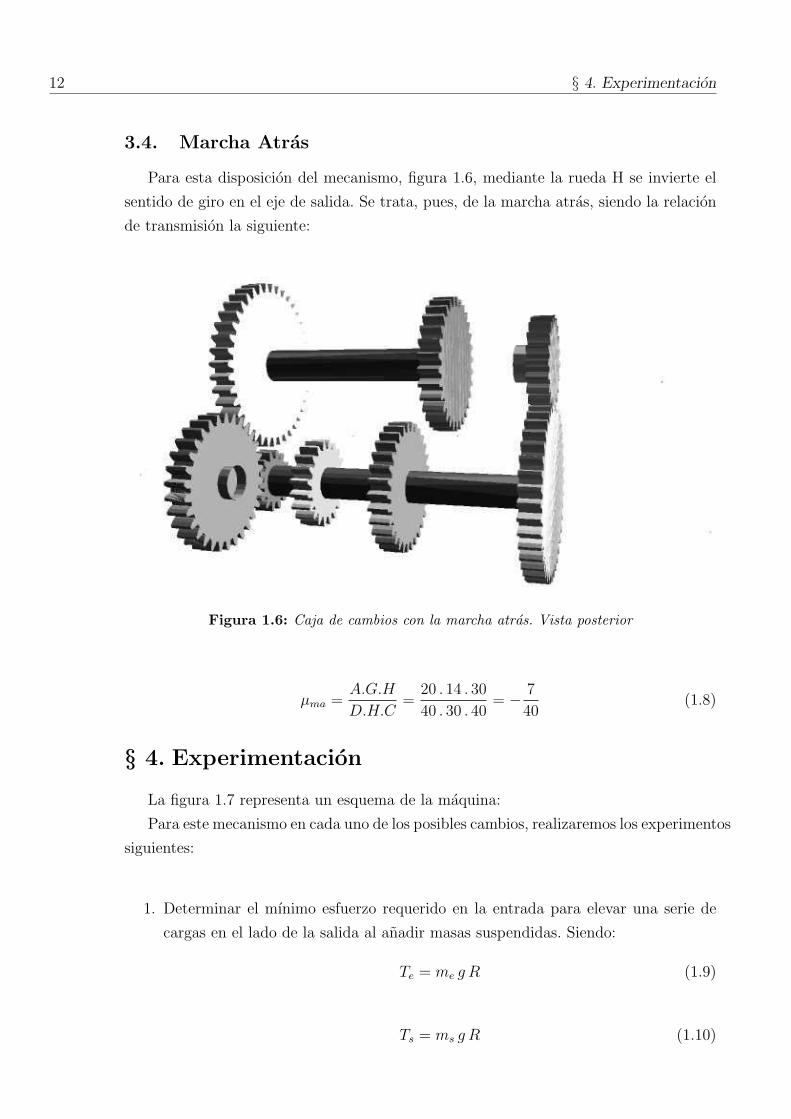
3.4. Marcha Atras
Para esta disposicion del mecanismo, figura 1.6, mediante la rueda H se invierte el
sentido de giro en el eje de salida. Se trata, pues, de la marcha atras, siendo la relacion
de transmision la siguiente:
Figura 1.6: Caja de cambios con la marcha atras. Vista posterior
µma =A.G.H
D.H.C=
20 . 14 . 30
40 . 30 . 40= −
7
40(1.8)
§ 4. Experimentacion
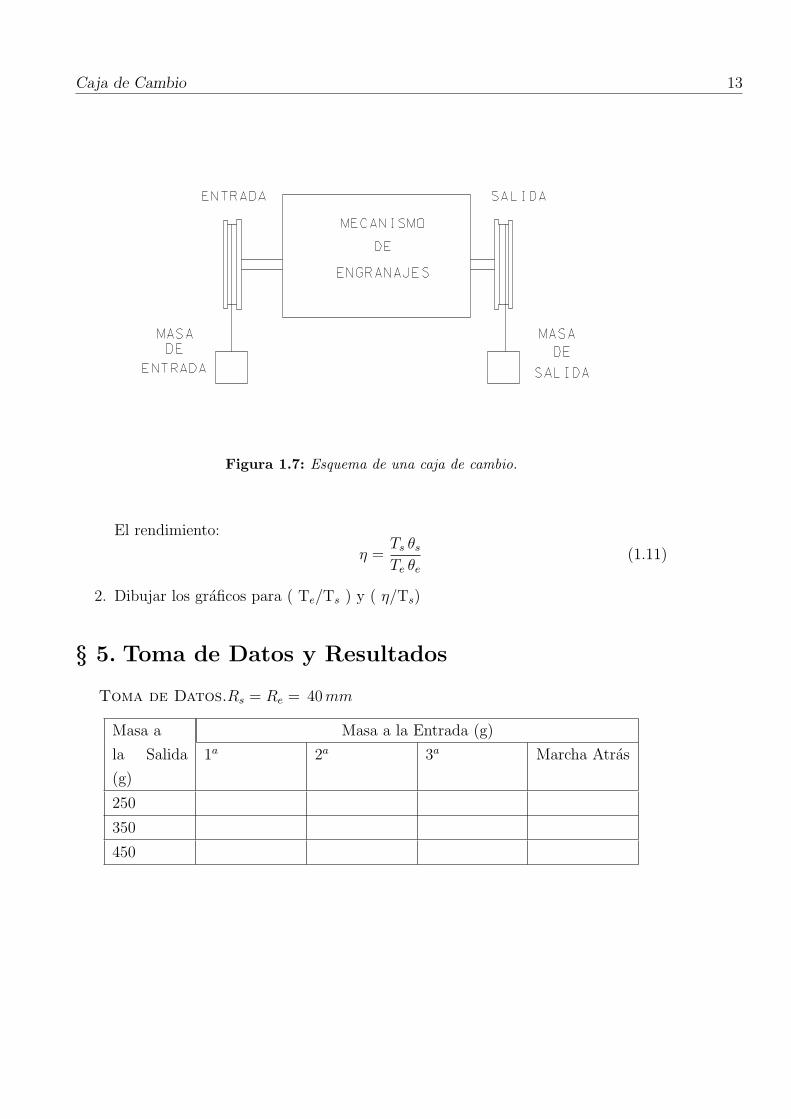
La figura 1.7 representa un esquema de la maquina:
Para este mecanismo en cada uno de los posibles cambios, realizaremos los experimentos
siguientes:
1. Determinar el mınimo esfuerzo requerido en la entrada para elevar una serie de
cargas en el lado de la salida al anadir masas suspendidas. Siendo:
Te = me g R (1.9)
Ts = ms g R (1.10)
Caja de Cambio 13
Figura 1.7: Esquema de una caja de cambio.
El rendimiento:
η =Ts θs
Te θe
(1.11)
2. Dibujar los graficos para ( Te/Ts ) y ( η/Ts)
§ 5. Toma de Datos y Resultados
Toma de Datos.Rs = Re = 40 mm
Masa a Masa a la Entrada (g)
la Salida
(g)
1a 2a 3a Marcha Atras
250
350
450
14 § 6. Graficos
Resultados
Masa a la Salida (g) TEntrada(N.m) TSalida(N.m) η( %)
1a
250
350
450
2a
250
350
450
3a
250
350
450
M. Atras
250
350
450
§ 6. Graficos
0 1 2 3 4 5 6 7 8 9 10 11 12 13 140
1
2
3
4
5
6
7
8
9
Par
de
Entr
ada(N
.m)
Par de salida (N.m)
Par de Entrada en funcion del Par de Salida.
Caja de Cambio 15
0 1 2 3 4 5 6 7 8 9 10 11 12 13 140
1
2
3
4
5
6
7
8
9
η(%
)
Par de salida (N.m)
Rendimiento en funcion del Par de Salida.
§ 7. Cuestiones
1. Explicar la relacion entre el par y la velocidad en las distintas marchas.
2. En el mecanismo de la practica ¿ por que el mejor rendimiento se obtiene en la
tercera velocidad?

16 § 7. Cuestiones
P.2Grupo Conico Diferencial
§ 8. Objetivos
En el mecanismo representativo de un equipo diferencial, se pretende:
1. Medir el desplazamiento angular correspondiente para los ejes de entrada y de
salida ası como comparar la relacion existente entre ellos cuando los ejes de salida
pueden girar libremente y cuando a uno de los mismos se le aplica una fuerza que
se opone a su libre giro (es decir, automovil en lınea recta, o curva, o patinando).
2. Ver la relacion existente entre los esfuerzos requeridos en la entrada para elevar
unas determinadas cargas en el lado de la salida en los casos citados anteriormente.
§ 9. Mecanismo Empleado
El mecanismo diferencial esta constituido por:
1. Un tren de engranajes planetarios (C)1.
2. El pinon del eje motriz (E).
3. La corona (D) que actua de soporte de planetarios.2. Su velocidad se determina de
la misma forma que se harıa para un tren de engranajes simples, una vez conocida
1Ver figura 2.1(b).2Generalmente se utilizan engranajes hipohidales.
17
18 § 10. Experimentacion
la velocidad del eje motriz.
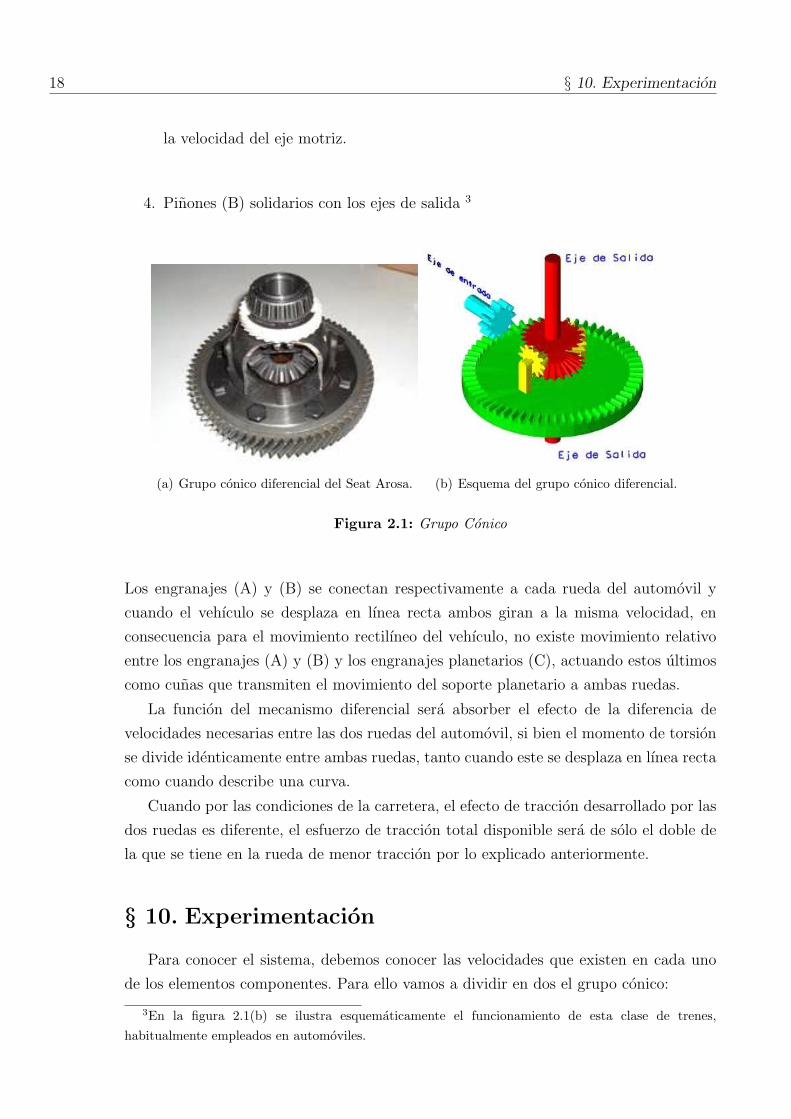
4. Pinones (B) solidarios con los ejes de salida 3
(a) Grupo conico diferencial del Seat Arosa. (b) Esquema del grupo conico diferencial.
Figura 2.1: Grupo Conico
Los engranajes (A) y (B) se conectan respectivamente a cada rueda del automovil y
cuando el vehıculo se desplaza en lınea recta ambos giran a la misma velocidad, en
consecuencia para el movimiento rectilıneo del vehıculo, no existe movimiento relativo
entre los engranajes (A) y (B) y los engranajes planetarios (C), actuando estos ultimos
como cunas que transmiten el movimiento del soporte planetario a ambas ruedas.
La funcion del mecanismo diferencial sera absorber el efecto de la diferencia de
velocidades necesarias entre las dos ruedas del automovil, si bien el momento de torsion
se divide identicamente entre ambas ruedas, tanto cuando este se desplaza en lınea recta
como cuando describe una curva.
Cuando por las condiciones de la carretera, el efecto de traccion desarrollado por las
dos ruedas es diferente, el esfuerzo de traccion total disponible sera de solo el doble de
la que se tiene en la rueda de menor traccion por lo explicado anteriormente.
§ 10. Experimentacion
Para conocer el sistema, debemos conocer las velocidades que existen en cada uno
de los elementos componentes. Para ello vamos a dividir en dos el grupo conico:
3En la figura 2.1(b) se ilustra esquematicamente el funcionamiento de esta clase de trenes,
habitualmente empleados en automoviles.
Grupo Conico Diferencial 19
Pinon de entrada y corona.
Grupo de engranajes conicos.
La primera parte tiene una relacion de transmision fija, por tanto cuando esta se ha
determinado no interviene en calculos posteriores. Mientras que para el segundo grupo
de elementos, deberemos hallar la relacion de transmision.
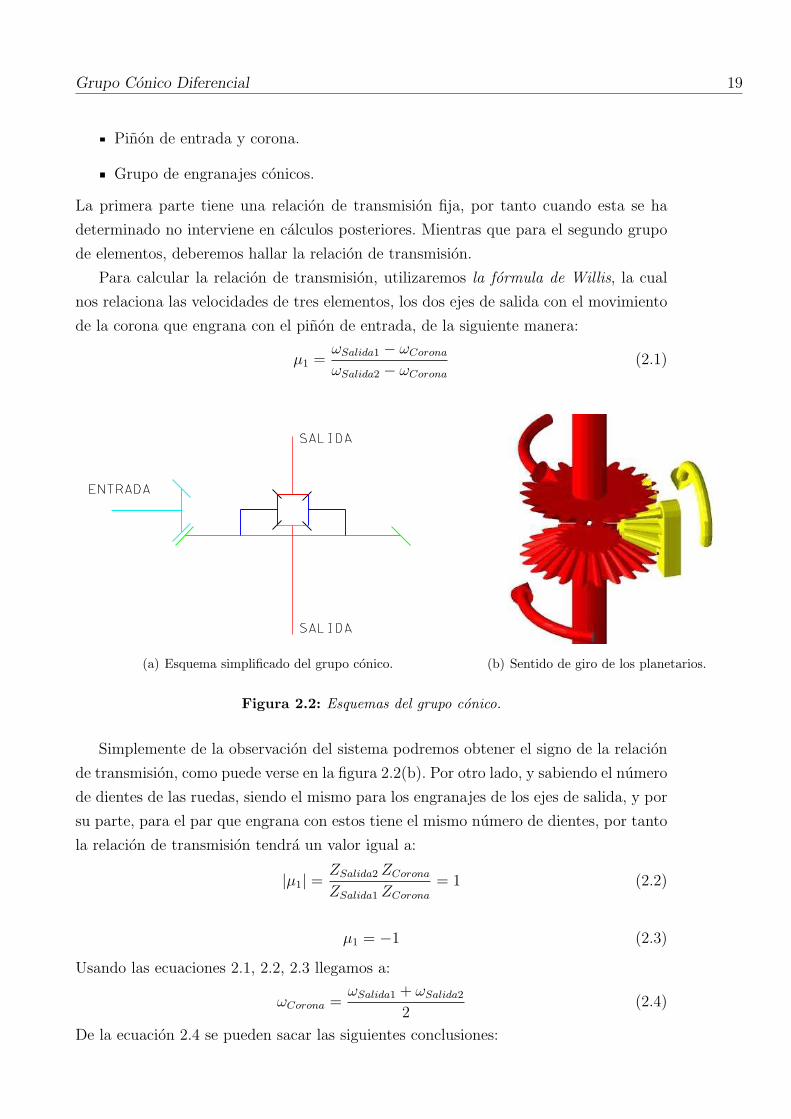
Para calcular la relacion de transmision, utilizaremos la formula de Willis, la cual
nos relaciona las velocidades de tres elementos, los dos ejes de salida con el movimiento
de la corona que engrana con el pinon de entrada, de la siguiente manera:
µ1 =ωSalida1 − ωCorona
ωSalida2 − ωCorona
(2.1)
(a) Esquema simplificado del grupo conico. (b) Sentido de giro de los planetarios.
Figura 2.2: Esquemas del grupo conico.
Simplemente de la observacion del sistema podremos obtener el signo de la relacion
de transmision, como puede verse en la figura 2.2(b). Por otro lado, y sabiendo el numero
de dientes de las ruedas, siendo el mismo para los engranajes de los ejes de salida, y por
su parte, para el par que engrana con estos tiene el mismo numero de dientes, por tanto
la relacion de transmision tendra un valor igual a:
|µ1| =ZSalida2 ZCorona
ZSalida1 ZCorona
= 1 (2.2)
µ1 = −1 (2.3)
Usando las ecuaciones 2.1, 2.2, 2.3 llegamos a:
ωCorona =ωSalida1 + ωSalida2
2(2.4)
De la ecuacion 2.4 se pueden sacar las siguientes conclusiones:
20 § 11. Toma de datos
1. Cuando un automovil gira en una curva, las ruedas tienen distinta velocidad
angular debido a que el radio de giro es distinto en cada rueda. Una ha de ir
mas deprisa que la otra para que las ruedas no deslicen; vemos que la velocidad
que nos viene del motor se reparte entre las dos ruedas.
2. Cuando el vehıculo se desplaza en lınea recta, ambas ruedas llevan la misma
velocidad, por lo que tenemos que la velocidad angular de las ruedas es la misma
que la de la corona.
3. Cuando una de las ruedas esta en el aire, toda la velocidad se va por la rueda
que esta al aire, o en terreno deslizante, esta absorbe todo el par, duplicando su
velocidad quedandose la otra parada.
Para la realizacion de la practica debemos calcular el trabajo realizado tanto en la
entrada como en la salida, para conocer el rendimiento de la maquina.
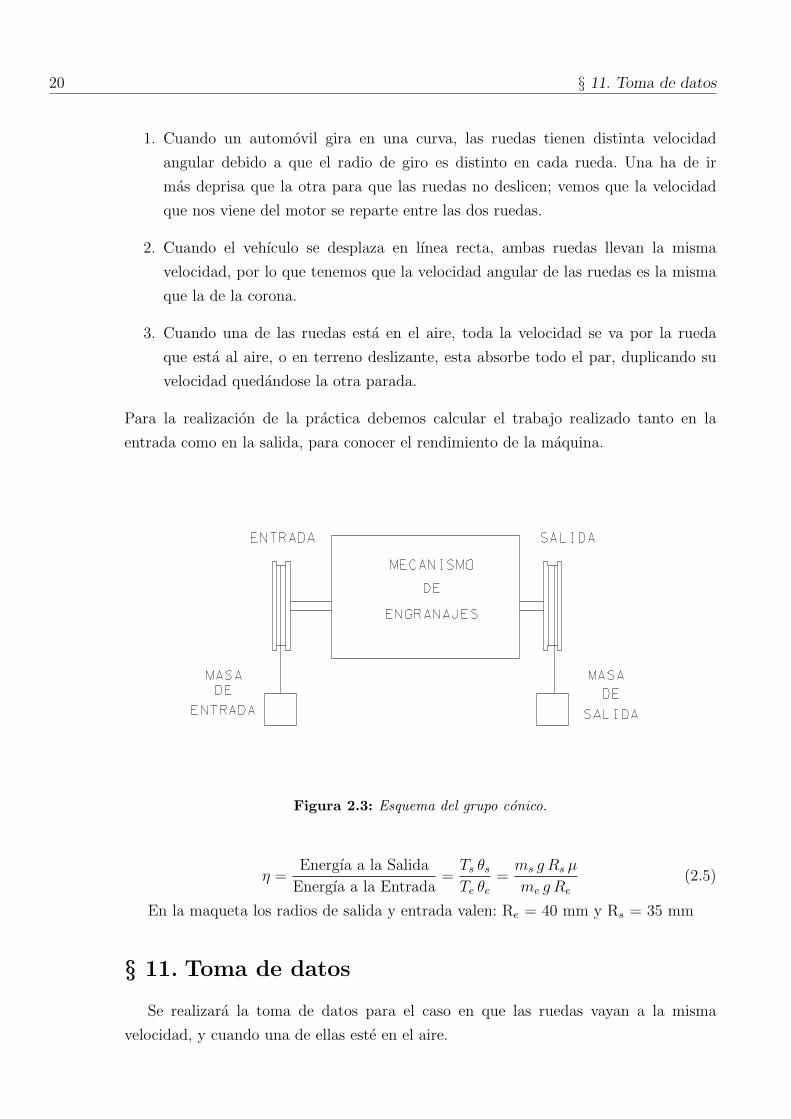
Figura 2.3: Esquema del grupo conico.
η =Energıa a la Salida
Energıa a la Entrada=
Ts θs
Te θe
=ms g Rs µ
me g Re
(2.5)
En la maqueta los radios de salida y entrada valen: Re = 40 mm y Rs = 35 mm
§ 11. Toma de datos
Se realizara la toma de datos para el caso en que las ruedas vayan a la misma
velocidad, y cuando una de ellas este en el aire.

Grupo Conico Diferencial 21
11.1. Lınea recta
Donde Ts = ms g Rs y Te = me g Re
ms(kg) me(kg) Ts(Nm) Te(Nm) η( %) µ
0’5
0’7
1
11.2. Rueda en el Aire
Donde Ts = ms
2g Rs y Te = me g Re
ms(kg) me(kg) Ts(Nm) Te(Nm) η( %) µ
0’5
0’7
1
§ 12. Graficos
0 1 2 3 4 5 6 7 8 9 10 11 12 13 140
1
2
3
4
5
6
7
8
9
Par
de
Entr
ada(N
.m)
Par de salida (N.m)
Par de Entrada en funcion del Par de Salida.
22 § 13. Cuestiones
0 1 2 3 4 5 6 7 8 9 10 11 12 13 140
1
2
3
4
5
6
7
8
9
η(%
)
Par de salida (N.m)
Par de Rendimiento en funcion del Par de Salida.
§ 13. Cuestiones
1. Explica con tus palabras el funcionamiento del grupo conico diferencial, describiendo
las partes que lo componen.
2. ¿Que conclusiones se pueden extraer de los graficos anteriores?
P.3Engranajes Epicicloidales
§ 14. Objetivos
Con la presente practica se persigue los siguientes objetivos:
Caracterizacion del movimiento para engranajes epicicloidales.
Medida del desplazamiento angular correspondiente al eje de entrada y salida
respectivamente, comparando la relacion existente entre estos para una relacion
de transmision directa y para una relacion de transmision abierta.
Determinar la relacion existente entre los esfuerzos requeridos a la entrada para
elevar unas determinadas cargas en el lado de la salida en los casos anteriormente
citados.
§ 15. Mecanismo de Engranajes Epicicloidales
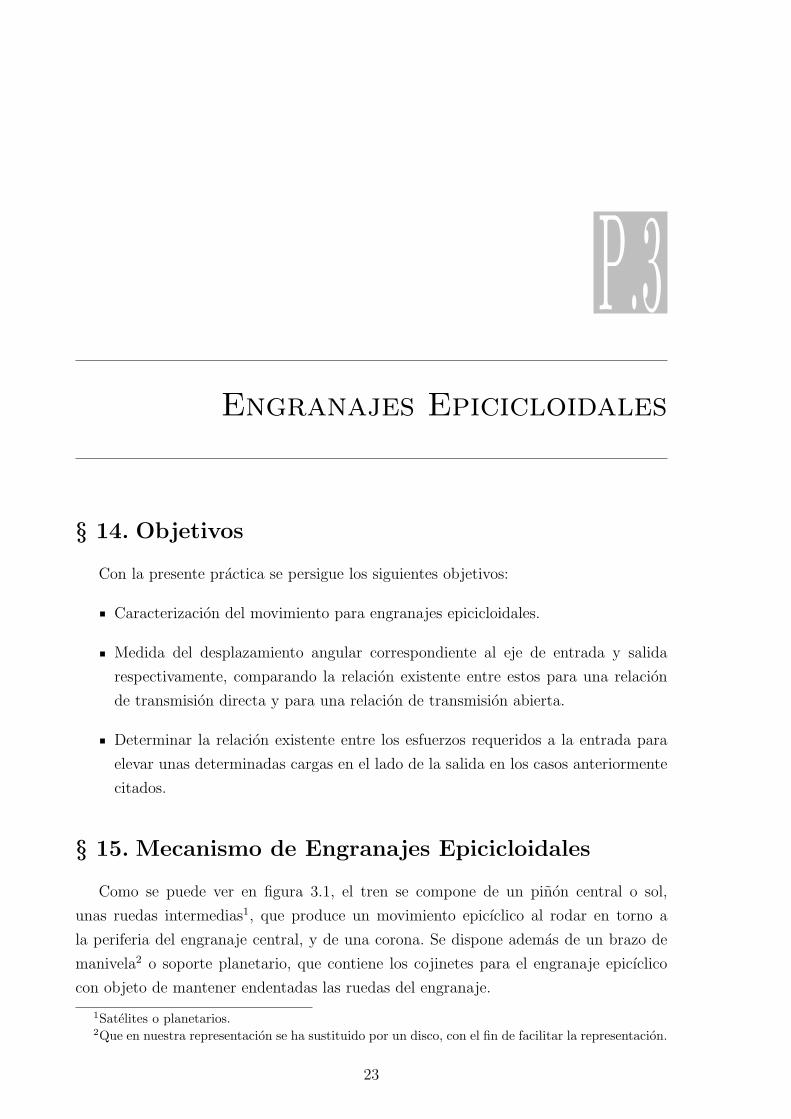
Como se puede ver en figura 3.1, el tren se compone de un pinon central o sol,
unas ruedas intermedias1, que produce un movimiento epicıclico al rodar en torno a
la periferia del engranaje central, y de una corona. Se dispone ademas de un brazo de
manivela2 o soporte planetario, que contiene los cojinetes para el engranaje epicıclico
con objeto de mantener endentadas las ruedas del engranaje.
1Satelites o planetarios.2Que en nuestra representacion se ha sustituido por un disco, con el fin de facilitar la representacion.
23
24 § 16. Mecanismo Empleado
Figura 3.1: Engranajes epicicloidales.
El tren de engranajes epicicloidales tiene tres o mas planetarios o satelites, lo cual
contribuye a un mayor equilibrio de las fuerzas, ya que el numero de fuerzas de transmision
es mayor, pero esta disposicion no varia en absoluto el comportamiento cinematico
del mecanismo. En todo caso, para cualquier numero de planetarios utilizados, solo se
podra emplear un soporte o brazo de entrada.
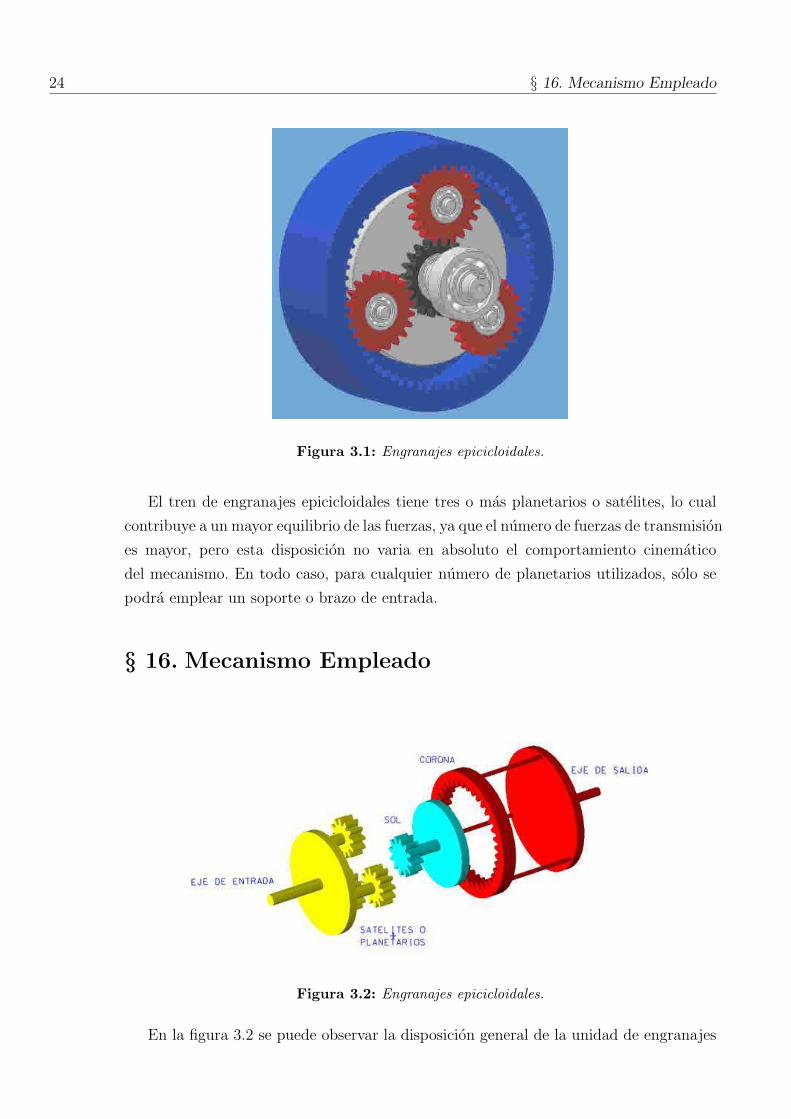
§ 16. Mecanismo Empleado
Figura 3.2: Engranajes epicicloidales.
En la figura 3.2 se puede observar la disposicion general de la unidad de engranajes
Engranajes Epicicloidales 25
epicicloidales. La unidad esta dotada de cojinetes en todas sus partes al objeto de reducir
al mınimo las perdidas por rozamiento.
En numero de dientes del sol y de los planetarios es el mismo, veintiun dientes,
mientras que la corona tiene el triple de dientes, sesenta y tres.
Una polea se ha fijado con un prolongador en el eje de entrada y otra en la salida,
estan dispuestas con chaflan y acanaladuras de modo que pueden ser cargadas individualmente
o utilizarse como poleas a fin de que puedan ser determinadas las velocidades y la
distribucion de momentos en las mismas.
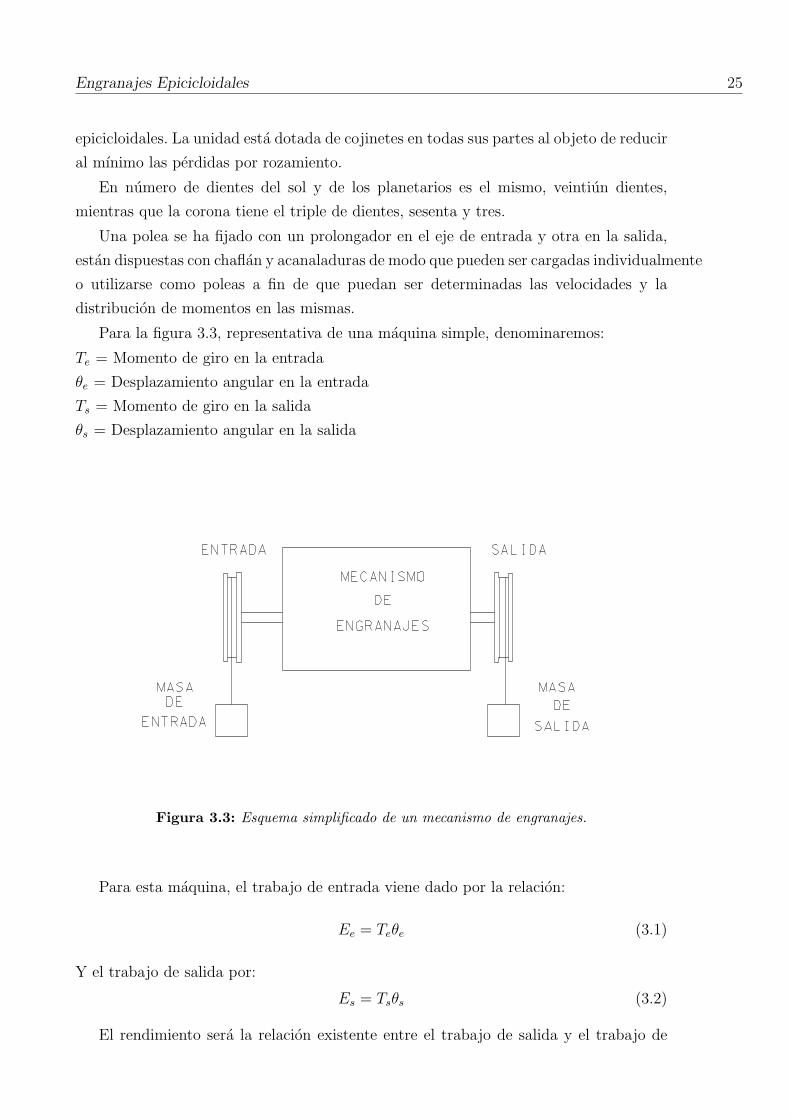
Para la figura 3.3, representativa de una maquina simple, denominaremos:
Te = Momento de giro en la entrada
θe = Desplazamiento angular en la entrada
Ts = Momento de giro en la salida
θs = Desplazamiento angular en la salida
Figura 3.3: Esquema simplificado de un mecanismo de engranajes.
Para esta maquina, el trabajo de entrada viene dado por la relacion:
Ee = Teθe (3.1)
Y el trabajo de salida por:
Es = Tsθs (3.2)
El rendimiento sera la relacion existente entre el trabajo de salida y el trabajo de
26 § 17. Transmision Directa
entrada, es decir:
η =Es
Ee
=Ts θs
Te θe
(3.3)
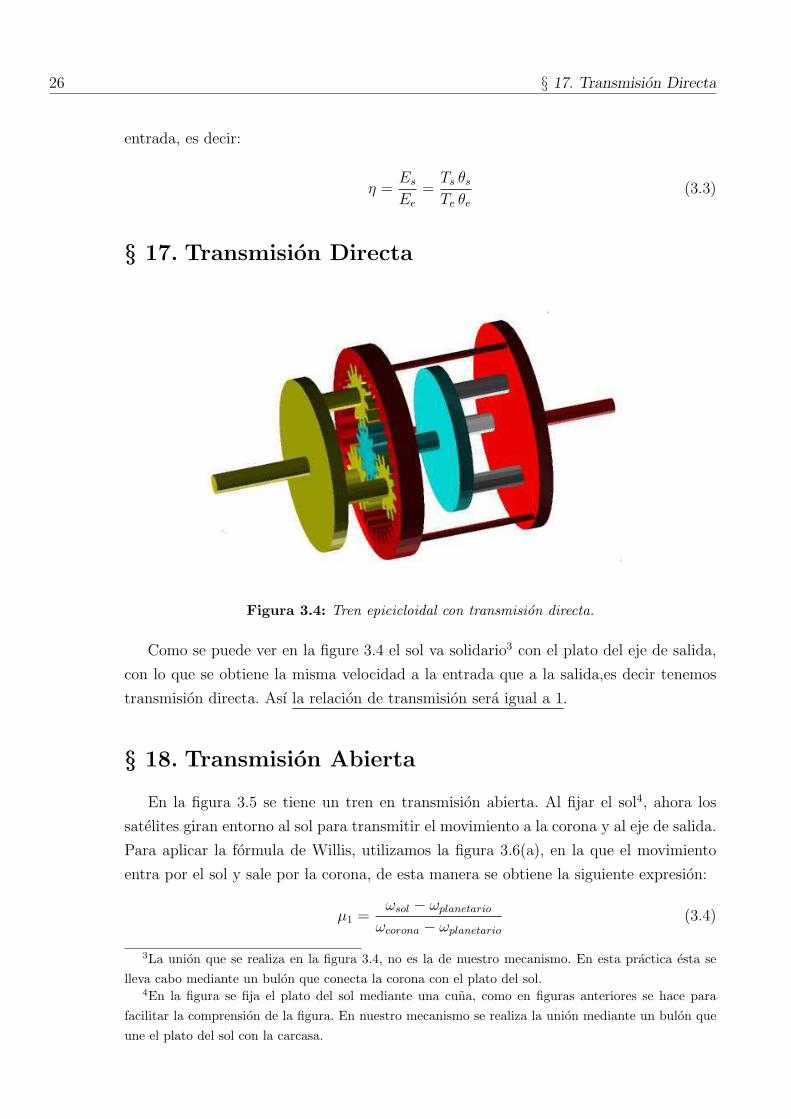
§ 17. Transmision Directa
Figura 3.4: Tren epicicloidal con transmision directa.
Como se puede ver en la figure 3.4 el sol va solidario3 con el plato del eje de salida,
con lo que se obtiene la misma velocidad a la entrada que a la salida,es decir tenemos
transmision directa. Ası la relacion de transmision sera igual a 1.
§ 18. Transmision Abierta
En la figura 3.5 se tiene un tren en transmision abierta. Al fijar el sol4, ahora los
satelites giran entorno al sol para transmitir el movimiento a la corona y al eje de salida.
Para aplicar la formula de Willis, utilizamos la figura 3.6(a), en la que el movimiento
entra por el sol y sale por la corona, de esta manera se obtiene la siguiente expresion:
µ1 =ωsol − ωplanetario
ωcorona − ωplanetario
(3.4)
3La union que se realiza en la figura 3.4, no es la de nuestro mecanismo. En esta practica esta se
lleva cabo mediante un bulon que conecta la corona con el plato del sol.4En la figura se fija el plato del sol mediante una cuna, como en figuras anteriores se hace para
facilitar la comprension de la figura. En nuestro mecanismo se realiza la union mediante un bulon que
une el plato del sol con la carcasa.

Engranajes Epicicloidales 27
Figura 3.5: Tren epicicloidal con transmision abierta.
Al restar la velocidad del planetario al sol y a la corona, es como si se se fijaran los
planetarios, y por tanto ωPlanetario = 0, quedando un tren de engranajes de ejes paralelos
del cual facilmente conocemos la relacion de transmision, figura 3.6(a).
µ1 =ωsol
ωcorona
=v
dsol
vdcorona
=dcorona
dsol
(3.5)
d = Z m (3.6)
µ1 =Zcorona
Zsol
= −63
21= −3 (3.7)
El signo menos que aparece en la ecuacion 3.7 es debido a que el sentido de giro del
sol y de la corona son opuestos como puede verse en la figura 3.6(b).
Utilizando las ecuaciones 3.5 y 3.7, y sabiendo que la velocidad del sol es cero cuando
la transmision es abierta, se obtienen las siguientes expresiones:
−3 =−ωplanetario
ωcorona − ωplanetario
(3.8)
3 ωplanetario − 3 ωcorona = −ωplanetario (3.9)
4 ωplanetario = 3 ωcorona (3.10)

28 § 19. Experimentacion
µ =ωplanetario
ωcorona
=3
4(3.11)
La ecuacion 3.11 nos da la relacion entre la velocidad de entrada, la de los planetarios,
y la de salida, la de la corona, es decir la relacion de transmision del tren de engranajes
epicicloidales.
(a) Esquema del tren epicicloidal. (b) Sentidos de giro en el tren.
Figura 3.6: Modelado de un tren epicicloidal.
§ 19. Experimentacion
En esta parte se va a :
1. Medir el desplazamiento angular correspondiente a los lados de entrada y de salida
y comparar la relacion existente θs / θe con la relacion de transmision calculada.
2. Determinar el mınimo esfuerzo necesario en la entrada para elevar una serie de
cargas en el lado de salida al anadir masas suspendidas.
Si el momento de entrada y salida viene dado por las ecuaciones 3.12 y 3.13,
Te = me g R (3.12)
Ts = ms g R (3.13)
Por lo que el rendimiento queda determinado por la relacion:
η =Ts
Te
θs
θe
=ms g R
me g R
θs
θe
=ms
me
µ (3.14)
Engranajes Epicicloidales 29
§ 20. Toma de Datos
En la maqueta los radios de salida y entrada valen: Re = 40 mm y Rs = 40 mm
20.1. Transmision Directa
ms(g) me(g) Ts(N m) Te(N m) η( %)
100
300
700
1000
20.2. Transmision Abierta
ms(g) me(g) Ts(N m) Te(N m) η( %)
100
300
700
1000
30 § 21. Graficos
§ 21. Graficos
0 1 2 3 4 5 6 7 8 9 10 11 12 13 140
1
2
3
4
5
6
7
8
9
Par
de
Entr
ada(N
.m)
Par de salida (N.m)
Par de Entrada en funcion del Par de Salida.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 140
1
2
3
4
5
6
7
8
9
η(%
)
Par de salida (N.m)
Rendimiento en funcion del Par de Salida.
Engranajes Epicicloidales 31
§ 22. Cuestiones
1. ¿Como se consigue una relacion de transmision, u otra en el mecanismo de engranajes
epicicloidales?
2. Comentar los graficos anteriores.

32 § 22. Cuestiones
P.4Montaje y Desmontaje de la Caja
de Cambios
§ 23. Objetivos
En esta practica, utilizando la caja de cambios de un SEAT Arosa, se persigue
conseguir:
1. Conocimiento de los elementos de los que consta una caja de cambios manual.
2. Desmontaje y observacion fısica de todos los elementos de la caja de cambios de
un automovil de traccion delantera.
3. Montaje de la caja de cambios.
§ 24. Caja de Cambios
La caja de cambios que se analiza a continuacion se compone de tres sistemas de
engranes:
1. Eje primario, figura 4.1(a).
2. Eje secundario, figura 4.1(b)
3. Grupo conico diferencial, figura 4.1(c).
33

34 § 24. Caja de Cambios
(a) Eje primario. (b) Eje secundario.
(c) Grupo Conico. (d) Eje primario y secundario.
Figura 4.1: Sistemas de engranajes de la caja de cambios.
El movimiento del motor llega hasta el eje primario. Este eje esta compuesto por una
serie de engranajes solidarios con el, que estan siempre engranados1 con los correspondientes
del eje secundario, que son locos. Para que el movimiento pase de un eje a otro, solo una
pareja de ruedas dentadas han de transmitir movimiento. Utilizando unos mecanismos
llamados sincronizadores, figura 4.3, alojados en el secundario, se selecciona la rueda
dentada que se hace solidaria con el eje secundario. De esta manera, modificando las
relaciones de transmision entre los engranajes, se controla la velocidad de salida. Los
engranajes utilizados en esta caja de cambios son helicoidales, debido a que poseen una
mayor capacidad de carga, y a que son mas silenciosos que los engranajes de dientes
rectos. Aun ası, el engranaje de marcha atras es recto para facilitar su engrane2, figura
4.2(a).
1Ver figura 4.1(d).2El engranaje de marcha atras no esta siempre engranado a diferencia de las demas velocidades. La
marcha atras engrana mediante la palanca que se muestra en la figura 4.2(c)

Montaje y Desmontaje de la Caja de Cambios 35
(a) Pinon de reenvıo de marcha atras. (b) Configuracion para la marcha atras.
(c) Palanca de la marcha atras.
Figura 4.2: Marcha atras.
§ 25. Sincronizador
La funcion del sincronizador es realizar la fijacion al eje secundario del engranaje que
se necesite en cada momento. Para realiza esta operacion, el sincronizador se compone
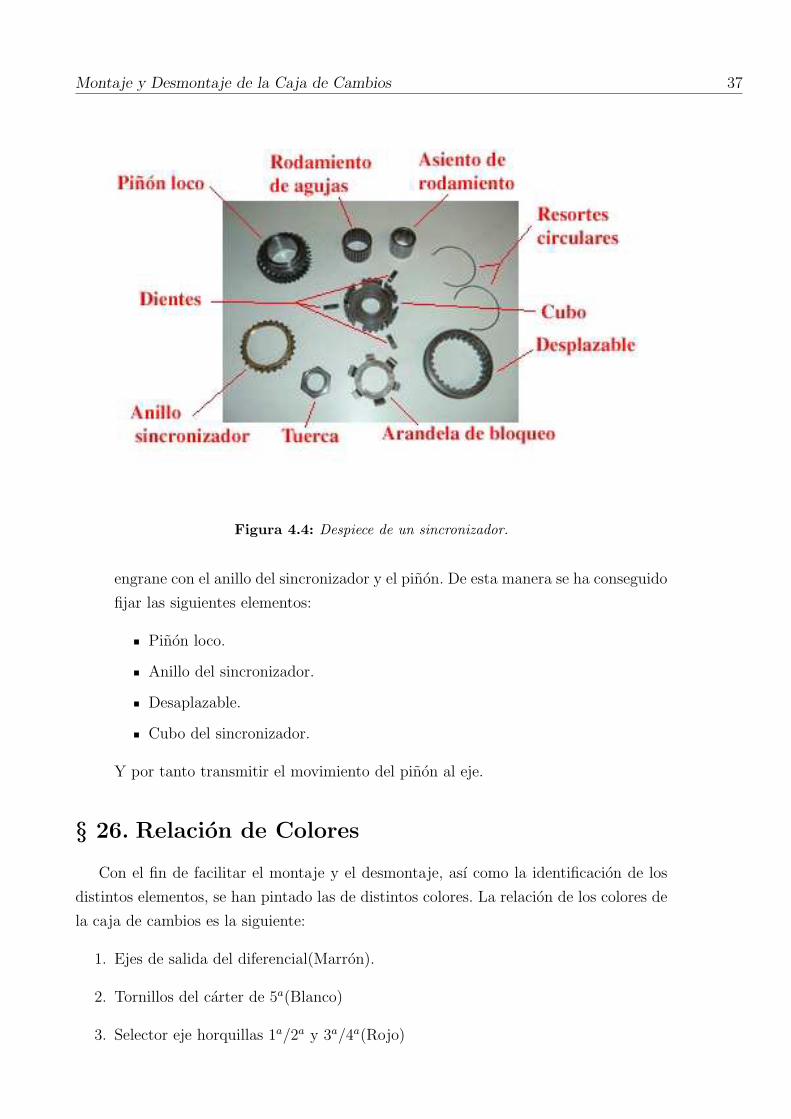
de las siguientes piezas, como puede verse en la figura 4.4:
1. Cubo del Sincronizador: parte unida solidariamente al eje, que sirve para igualar
del engranaje y del eje.
2. Anillo del sincronizador: elemento solidario con el cubo, con respecto al cual tiene
una cierta holgura. Su interior es conico y ajusta sobre el pinon loco.
3. Pinon del secundario, ((loco)): va alojado sobre un rodamiento de agujas en el
secundario, su extremo es conico, y sobre el se aloja el anillo del sincronizador.
4. Desplazable: elemento deslizante sobre el cubo del sincronizador, que en su movimiento
une el cubo con el anillo del sincronizador y el pinon del secundario. El movimiento
del desplazable se controla a traves de una horquilla unida directamente a la
palanca de cambio.

36 § 25. Sincronizador
(a) (b)
(c)
Figura 4.3: Diferentes vistas de un sincronismo.
5. Dientes del sincronizador: van que unidos con par de resortes circulares, y colocan
al deslizante en unas posiciones fijas.
El funcionamiento del sincronizador se puede resumir en los siguientes pasos3:
1. Cuando el sistema se encuentra en punto muerto, el movimiento del primario no
llega al secundario; esto se debe a que los pinones del secundario estan montados
sobre rodamientos de agujas.
Para seleccionar una velocidad se necesita transmitir el movimiento del pinon al
eje; pero esta operacion no se puede realizar directamente, ya que el pinon se monta
sobre rodamientos. Por tanto, se necesita otro elemento ((sincronizador)) con el que
fijar el pinon al eje.
2. Al mover el desplazable, y debido a la holgura que existe entre el cubo y el anillo
del sincronizador, todo el conjunto, desplazable, dientes, y anillo, se aproximan al
pinon. En este movimiento, y debido a que el interior del anillo y el exterior del
pinon son conicos, se igualan las velocidades del anillo y del pinon.
3. Una vez igualadas las velocidades, y gracias a la fuerza que viene de la palanca de
cambio, los dientes del sincronizador dejan moverse al desplazable para que este
3El cambio de velocidades se realiza con el motor desembragado, es decir, sin que se transmita
ningun par del motor a la caja de velocidades.
Montaje y Desmontaje de la Caja de Cambios 37
Figura 4.4: Despiece de un sincronizador.
engrane con el anillo del sincronizador y el pinon. De esta manera se ha conseguido
fijar las siguientes elementos:
Pinon loco.
Anillo del sincronizador.
Desaplazable.
Cubo del sincronizador.
Y por tanto transmitir el movimiento del pinon al eje.
§ 26. Relacion de Colores
Con el fin de facilitar el montaje y el desmontaje, ası como la identificacion de los
distintos elementos, se han pintado las de distintos colores. La relacion de los colores de
la caja de cambios es la siguiente:
1. Ejes de salida del diferencial(Marron).
2. Tornillos del carter de 5a(Blanco)
3. Selector eje horquillas 1a/2a y 3a/4a(Rojo)
38 § 27. Desmontaje
4. Eje primario(Azul).
5. Eje secundario(Verde).
6. Tornillos de union de los carteres de pinonerıa y de embrague(Negro)
7. Eje del pinon de reenvıo de marcha atras(Naranja).
8. Eje de horquilla de 5a(Morado).
§ 27. Desmontaje
Para desmontar la caja de cambios debemos seguir los pasos que se indican a
continuacion.
1. Desmontar los ejes de salida del diferencial (color marron) golpeando con el martillo
de nailon.
2. Quitar los tornillos del carter de 5a (color blanco) con llave de carraca de 13 mm.
3. Sacar el pasador de la horquilla de 5a golpeando con el martillo y ayudandose con
el botador de diametro 5 mm.
4. Extraer simultaneamente la horquilla y el desplazable de 5a. Despues montar
el desplazable solo, para meter la 5a marcha, orientando el lado puntiagudo de
los dientes hacia el pinon y alineando los vaciados de los dientes con los dientes
alojados en los vaciados del cubo e introduciendolo hasta que engrane con el pinon.
5. Presionar el selector (color rojo) para meter una segunda marcha y ası bloquear
la caja.
6. Aflojar las tuercas del extremo del eje primario (color azul) y del eje secundario
(color verde) utilizando la llave de tubo de 32 mm.
7. Sacar del eje secundario las siguientes piezas todas juntas para evitar el desarmado:
la arandela de bloqueo, el desplazable, el sincronizador y el pinon loco de 5a,
incluyendo el rodamiento de agujas y su pista interior alojados bajo el conjunto
anterior.
8. Sacar del eje primario el engranaje de 5a.
9. Devolver el cambio al punto muerto buscando la posicion central del mando
principal.

Montaje y Desmontaje de la Caja de Cambios 39
(a) Tapon de registro. (b) Contactor de la marcha atras.
Figura 4.5: Tapon de registro y contactor de marcha atras
10. Quitar los tornillos de union de los carteres de pinonerıa y de embrague (color
negro) con llave de carraca de 13 mm.
11. Apoyar la caja por el lado del carter de 5a y extraer el carter de embrague y el
diferencial. Si es necesario ayudandose con martillo de nailon.
12. Sacar el eje del pinon de reenvıo de marcha atras (color naranja) del carter de
pinonerıa (es posible que al extraer el carter de embrague , el eje salga encajado
en este).
13. Retirar el pinon de reenvıo de marcha atras, su arandela y su goma.
14. Quitar el contactor de luz de marcha atras, alojado en el lateral exterior del carter
de pinonerıa al lado del tapon de registro, con llave inglesa (22 mm).
15. Extraer el eje de horquilla de 5a (color morado). Para ello, se pueden seguir los
pasos siguientes. Estando el eje de horquillas de 1a/2a y 3a/4a (color rojo) en punto
muerto, girarlo en sentido horario hasta que haga tope. Seguidamente girar el eje
de horquilla de 5a un cuarto de vuelta en sentido antihorario hasta que se libere
el teton y extraerlo.
16. Quitar el tapon de registro (color negro) del lateral exterior del carter de pinonerıa,
con llave inglesa (24mm).
17. Colocar la caja de lado, con la parte del carter de 5a hacia nosotros.
18. Abrir el anillo de freno del eje secundario con los alicates y al mismo tiempo
golpear con el martillo de nailon al eje hasta que el anillo de freno salve la ranura
del rodamiento anulando ası su efecto, sin sacar el rodamiento por completo. Para
ayudar a que salga, levantar un poco la parte opuesta del eje.
40 § 28. Montaje
19. Proceder de la misma forma con el eje primario.
20. Golpear alternativamente con el martillo de nailon a los dos ejes para que salgan
a la vez, junto con el eje de horquillas. Levantar un poco la parte opuesta de los
ejes.
§ 28. Montaje
Para efectuar correctamente el montaje de la caja debemos proceder con los siguientes
pasos:
1. Acoplar el eje de horquillas de 1a/2a y de 3a/4a (color rojo), montado segun
se observa en la fotografıa, en el eje secundario (color verde), teniendo este los
desplazables en punto muerto.
2. Introducir simultaneamente el conjunto anterior y el eje primario (color azul) en
el carter de pinonerıa, cada uno en su alojamiento.
3. Una vez esten los rodamientos en sus asientos y los ejes totalmente perpendiculares
a estos, golpear alternativamente con el martillo de nailon los ejes primario y
secundario hasta que hagan tope con los anillos de freno.
4. Abrir el anillo de freno del eje primario con los alicates y golpear este eje hasta
encajar dicho anillo en la ranura del rodamiento, levantar un poco el eje si hace
falta.
5. Proceder del mismo modo con el eje secundario.
6. Poner el tapon de registro y apretar con llave inglesa (24 mm).
7. Por el lado del carter de 5a montar en el eje primario el engranaje de 5a colocando
el colların hacia el rodamiento y apretar la tuerca a mano.
8. En el eje secundario, teniendo cuidado de que no se desarme, montar la pista
interior del rodamiento, el rodamiento de agujas, el pinon loco de 5a, el sincronizador,
el desplazable de 5a junto con la arandela de bloqueo y finalmente apretar la tuerca
a mano.
9. Empujar el desplazable de 5a hacia el pinon loco hasta meter esta marcha.
10. Presionar el selector (color rojo) para meter una segunda marcha y ası bloquear
la caja. Si no se mete la marcha girar un poco el eje de horquillas.
Montaje y Desmontaje de la Caja de Cambios 41
11. Apretar ambas tuercas de los ejes primario y secundario con la llave de tubo de
32 mm.
12. Devolver el eje de horquillas al punto muerto y luego girar este en sentido horario
hasta que haga tope.
13. Introducir el eje de horquilla de 5a (color morado) por el extremo mas largo,
orientandolo de tal manera que el teton este enfrentado con el hueco del contactor
de luces de marcha atras y una vez que llegue a la altura de la ranura del cubo
del eje de horquillas girar en sentido horario hasta que haga tope, sin forzarlo.
14. Por el lado del carter de 5a sacar el desplazable del eje secundario.
15. Montar el desplazable junto con la horquilla de manera que la parte larga del
cuello de esta este orientada hacia la caja. El lado puntiagudo de los dientes del
desplazable ha de estar tambien orientando hacia la caja y los vaciados de los
dientes han de estar alineados con los dientes alojados en los vaciados del cubo.
Es posible que al montarlo se meta la 5a velocidad.
16. Colocar el pasador que fija la horquilla al eje con el martillo.
17. Devolver el cambio al punto muerto.
18. Colocar el carter de 5a y apretar los tornillos (color blanco) con llave de carraca
de 13 mm.
19. Poner el contactor de luces de marcha atras y apretar con llave inglesa (22mm).
20. Dar la vuelta a la caja apoyandola sobre el carter de 5a.
21. Colocar el pinon de reenvıo de marcha atras en su eje (color naranja), dejando el
cuello del pinon orientado hacia el pasador y metiendo posteriormente la arandela
y la goma en este orden por el mismo lado del eje.
22. Montar este conjunto en su alojamiento del carter esquivando el pinon de 1a.
23. Orientar el pasador del eje de marcha atras apuntando hacia el eje de horquilla de
5a.
24. Colocar el diferencial en su alojamiento de forma que engrane con el eje secundario.
Asegurarse de que los dos planetarios esten alineados.
25. Montar el eje de salida (color marron) de la parte del carter de 5a hasta que entre
en su planetario.
42 § 29. Cuestiones
26. Asegurarse de que la caja esta en punto muerto.
27. Preparar el carter de embrague levantando un poco la palanca accionadora de
marcha atras y presionar el mando principal hasta el fondo para que el casquillo
de mando se levante al maximo.
28. Colocar el carter de embrague sobre el de pinonerıa vigilando que todos los ejes
entren en sus alojamientos hasta que el dedo de mando del eje de horquillas de
1a/2a y de 3a/4a entre en su casquillo sin desplazarle.
29. Una vez que haya entrado el dedo de mando en el casquillo, quitar el tapon de
registro y golpear el carter con el martillo de nailon hasta que se acoplen por
completo ambos carteres.
30. Ayudandose del botador, a traves del hueco del tapon de registro, levantar el cubo
del eje de horquillas hasta centrarlo con el agujero para que se pueda poner el
tapon de registro.
31. Volver a poner el tapon de registro.
32. Apretar los tornillos de union del carter de pinonerıa y embrague (color negro)
con llave de carraca de 13 mm.
33. Montar el eje de salida de la parte del carter de embrague.
§ 29. Cuestiones
1. ¿Por que los engranajes de la marcha atras son rectos?
2. ¿Para que sirve el tapon de registro?
3. Diferencias fundamentales entre el eje primario y el secundario.

P.5Freno de Tambor
§ 30. Objetivos
Figura 5.1: Ejemplo de Freno de Tambor.
Sobre un mecanismo representativo de un freno de tambor, la presente practica
propone demostrar:
Las relaciones existentes entre las fuerzas actuantes y los momentos de frenado.
Demostrar la diferencia que se obtiene para el momento de frenado cuando la
palanca portadora de la zapata es traccionada, o cuando es comprimida, segun el
sentido de giro que se le de al tambor.
43
44 § 31. Freno de Tambor
§ 31. Freno de Tambor
Es un mecanismo que se utiliza para detener el movimiento de ejes o arboles en
rotacion.
El freno de tambor se compone de:
1. Un tambor, el cual se une a la rueda mediante unos esparragos.
2. Las zapatas, elementos metalicos recubiertos de material de alto coeficiente de
friccion ( “ferodo” ).
3. El plato del freno, que es el soporte donde se apoyan las zapatas.
§ 32. Mecanismo Empleado
El mecanismo utilizado para la practica se compone de un tambor y dos zapatas
ancladas con cuatro brazos, para la mejor realizacion del estudio que nos ocupa, ası como
de los accesorios necesarios para aplicar las fuerzas.
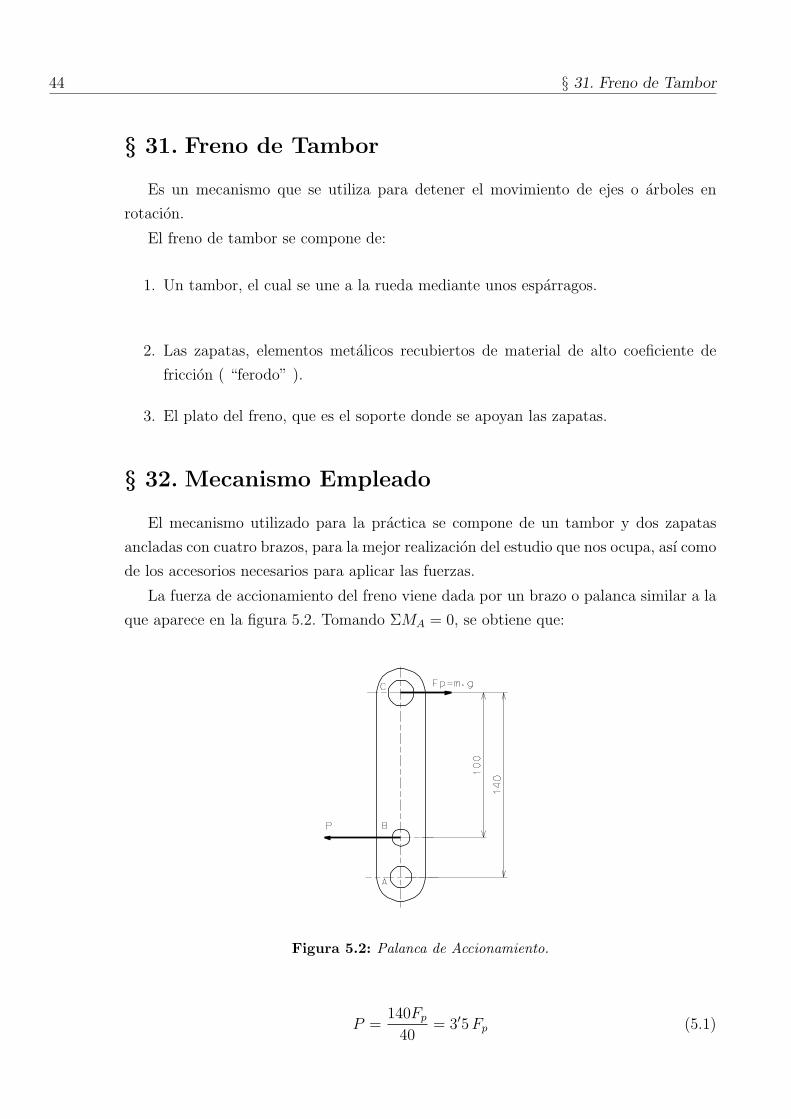
La fuerza de accionamiento del freno viene dada por un brazo o palanca similar a la
que aparece en la figura 5.2. Tomando ΣMA = 0, se obtiene que:
Figura 5.2: Palanca de Accionamiento.
P =140Fp
40= 3′5 Fp (5.1)
Freno de Tambor 45
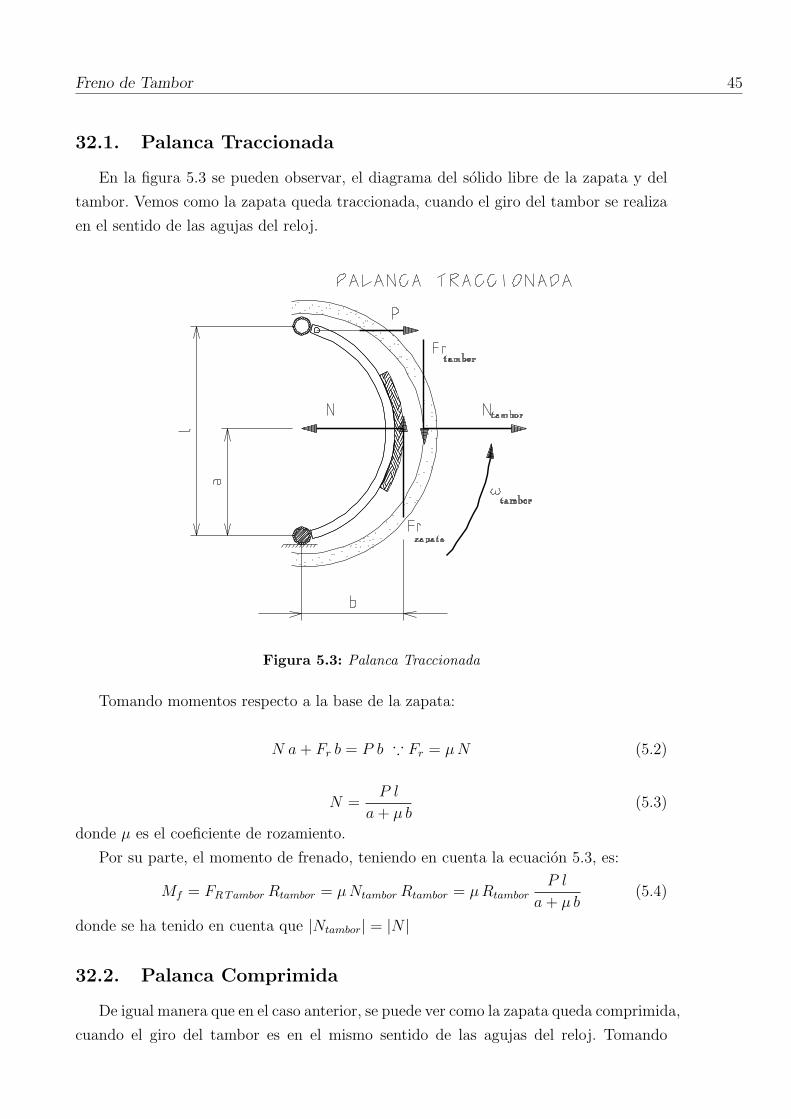
32.1. Palanca Traccionada
En la figura 5.3 se pueden observar, el diagrama del solido libre de la zapata y del
tambor. Vemos como la zapata queda traccionada, cuando el giro del tambor se realiza
en el sentido de las agujas del reloj.
Figura 5.3: Palanca Traccionada
Tomando momentos respecto a la base de la zapata:
N a + Fr b = P b ∵ Fr = µ N (5.2)
N =P l
a + µ b(5.3)
donde µ es el coeficiente de rozamiento.
Por su parte, el momento de frenado, teniendo en cuenta la ecuacion 5.3, es:
Mf = FR Tambor Rtambor = µ Ntambor Rtambor = µ Rtambor
P l
a + µ b(5.4)
donde se ha tenido en cuenta que |Ntambor| = |N |
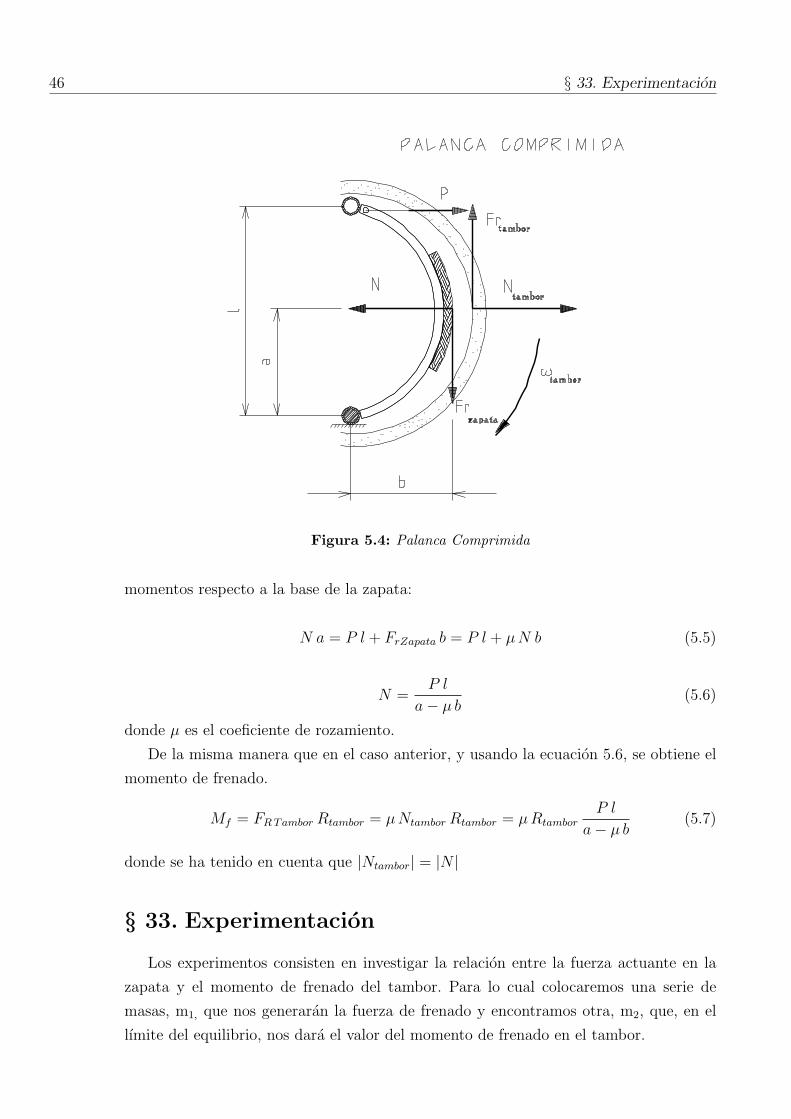
32.2. Palanca Comprimida
De igual manera que en el caso anterior, se puede ver como la zapata queda comprimida,
cuando el giro del tambor es en el mismo sentido de las agujas del reloj. Tomando
46 § 33. Experimentacion
Figura 5.4: Palanca Comprimida
momentos respecto a la base de la zapata:
N a = P l + FrZapata b = P l + µ N b (5.5)
N =P l
a − µ b(5.6)
donde µ es el coeficiente de rozamiento.
De la misma manera que en el caso anterior, y usando la ecuacion 5.6, se obtiene el
momento de frenado.
Mf = FR Tambor Rtambor = µ Ntambor Rtambor = µ Rtambor
P l
a − µ b(5.7)
donde se ha tenido en cuenta que |Ntambor| = |N |
§ 33. Experimentacion
Los experimentos consisten en investigar la relacion entre la fuerza actuante en la
zapata y el momento de frenado del tambor. Para lo cual colocaremos una serie de
masas, m1, que nos generaran la fuerza de frenado y encontramos otra, m2, que, en el
lımite del equilibrio, nos dara el valor del momento de frenado en el tambor.
Freno de Tambor 47
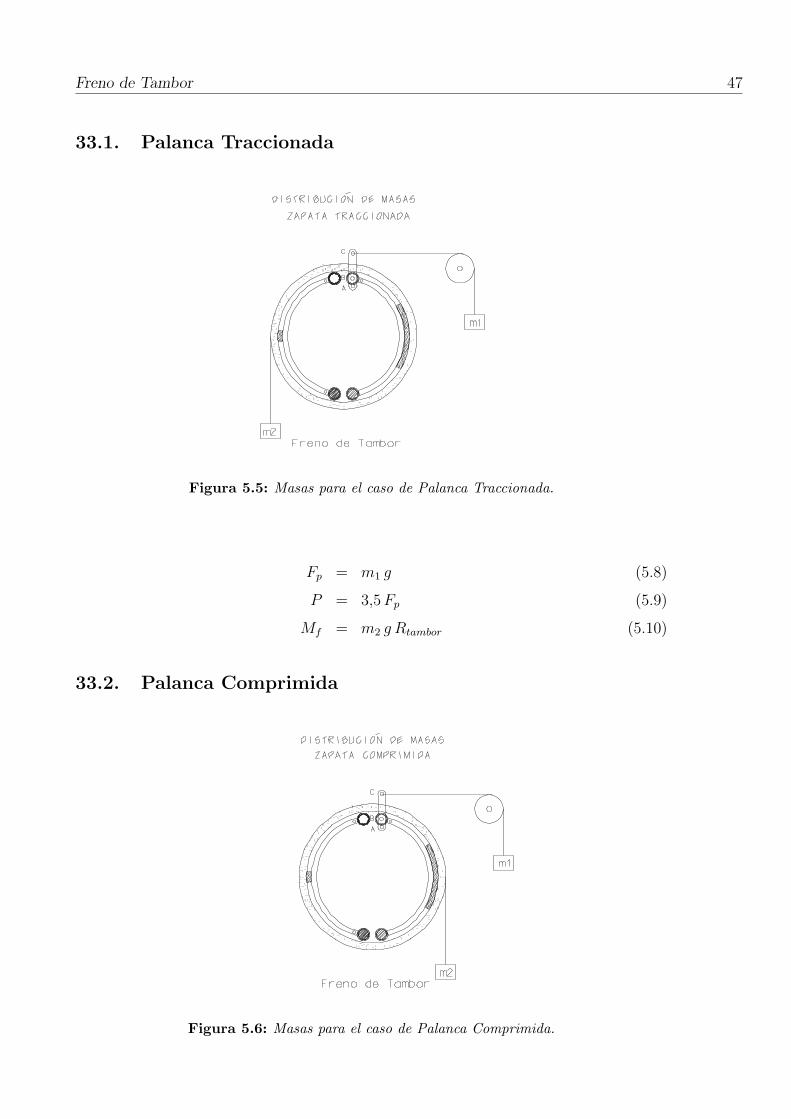
33.1. Palanca Traccionada
Figura 5.5: Masas para el caso de Palanca Traccionada.
Fp = m1 g (5.8)
P = 3,5 Fp (5.9)
Mf = m2 g Rtambor (5.10)
33.2. Palanca Comprimida
Figura 5.6: Masas para el caso de Palanca Comprimida.

48 § 34. Toma de Datos
Fp = m1 g (5.11)
P = 3,5 Fp (5.12)
Mf = m2 g Rtambor (5.13)
33.3. Palanca Traccionada y Comprimida
Figura 5.7: Masas para el caso de Palanca Traccionada y Comprimida.
Fp = m1 g (5.14)
P = 3,5 Fp (5.15)
Mf = m2 g Rtambor (5.16)
§ 34. Toma de Datos
Sabiendo que el valor de las constantes anteriormente utilizadas es:
A=B L R
0.095 m 0.19 m 0.12 m

Freno de Tambor 49
34.1. Palanca Traccionada
m1 (g) m2(g) P(N) Mf (N m)
300
400
500
34.2. Palanca Comprimida
m1 (g) m2 (g) P(N) Mf (N m)
300
400
500
34.3. Palanca Traccionada y Comprimida
m1 (g) m2 (g) P(N) Mf (N m)
300
400
500
§ 35. Resultados
50§
35.R
esulta
dos
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 210
1
2
3
4
5
6
7
8
9
10
11
12
13
MF
renado (N
.m)
Par de salida (N.m)
Variacion del Par de Frenado en Funcion de la Fuerza de Accionamiento.
Freno de Tambor 51
§ 36. Cuestiones
1. ¿Por que el momento de frenado en la palanca traccionada es menor que en la
comprimida?
2. ¿De que tipo es la relacion que existe entre el momento de frenado y la fuerza de
accionamiento?
3. Sabiendo la relacion existente entre el momento de frenado y la fuerza de accionamiento,
calcular el coeficiente de rozamiento de la zapata.

52 § 36. Cuestiones
Bibliografıa
[1] Fernandez Benıtez, M. ((Mecanica Tecnica)). Servicio de Publicaciones de la E.U.I.T.I
Madrid. 1990
[2] Gutierrez Fuentes, D. y Sanz Culebras J.D. ((Proyecto Fin de Carrera: Caja de
Cambio)) UPM EUITI Julio 2004
[3] Shigley, J.E. y Mischke Charles R.((Diseno en Ingenierıa Mecanica)) Editorial
McGrawhill. 2002
[4] Shigley, J.E. y Uiker J.J. ((Teorıa de Maquinas y Mecanismos)) Editorial McGrawhill.
1995
[5] Vera Martınez, V.V.((Analisis Cinematico y Dinamica de Mecanismos)). Servicio de
Publicaciones de la E.U.I.T.I Madrid.1996
[6] Vera Martınez, V.V. ((Elementos de Maquinas)). Servicio de Publicaciones de la
E.U.I.T.I Madrid. 1996
53