Embed Size (px)
Citation preview
BAB I
PENDAHULUAN
1.1 Latar Belakang
Motor arus searah (motor DC) telah ada selama lebih dari seabad.
Keberadaan motor DC telah membawa perubahan besar sejak dikenalkan
motor induksi, atau terkadang disebut AC Shunt Motor. Motor DC telah
memunculkan kembali Silicon Controller Rectifier yang digunakan untuk
memfasilitasi kontrol kecepatan pada motor. Mesin listrik dapat berfungsi
sebagai motor listrik apabila didalam motor listrik tersebut terjadi proses
konversi dari energi listrik menjadi energi mekanik. Motor listrik
merupakan perangkat elektromagnetis yang mengubah energi listrik
menjadi energi mekanik.
Energi mekanik ini digunakan untuk, misalnya memutar impeller
pompa, fan atau blower, menggerakan kompresor dan mengangkat
bahan. Motor listrik digunakan juga di rumah (mixer, bor listrik, kipas
angin) dan di industri. Motor listrik terkadang disebut “kuda kerja” nya
industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70%
beban listrik total di industri.
Berdasarkan karakteristiknya motor arus searah mempunyai
daerah pengaturan putaran yang luas dibandingkan dengan motor arus
bolak balik, sehingga sampai sekarang masih banyak digunakan pada
pabrik dan industri.
Mesin-mesin listrik pada industri merupakan bagian yang tidak
dapat terpisahkan. Motor arus searah penguatan terpisah adalah salah
satu bagian terpenting dalam aplikasi sebagai penggerak pada proses
industria.
1
1.2 Tujuan Penulisan
Adapun tujuan yang ingin dicapai dalam penulisan makalah ini
adalah:
1. Mahasiswa dapat mengetahui prinsip kerja motor arus
searah
2. Mahasiswa dapat mengetahui karakteristik motor arus
searah penguatan terpisah
3. Mahasiswa dapat mengetahui prinsip kerja motor arus
searah peguatan terpisah
2
BAB II
PEMBAHASAN
2.1 Pengertian Motor DC
Sebuah motor listrik mengubah energi listrik menjadi energi
mekanik. Kebanyakan motor listrik beroperasi melalui interaksi medan
magnet dan konduktor pembawa arus untuk menghasilkan kekuatan,
meskipun motor elektrostatik menggunakan gaya elektrostatik. Proses
sebaliknya, menghasilkan energi listrik dari energi mekanik, yang
dilakukan oleh generator seperti alternator, atau dinamo. Banyak jenis
motor listrik dapat dijalankan sebagai generator, dan sebaliknya. Misalnya
generator atau starter untuk turbin gas, atau motor traksi yang digunakan
untuk kendaraan, sering melakukan kedua tugas. motor listrik dan
generator yang sering disebut sebagai mesin-mesin listrik.
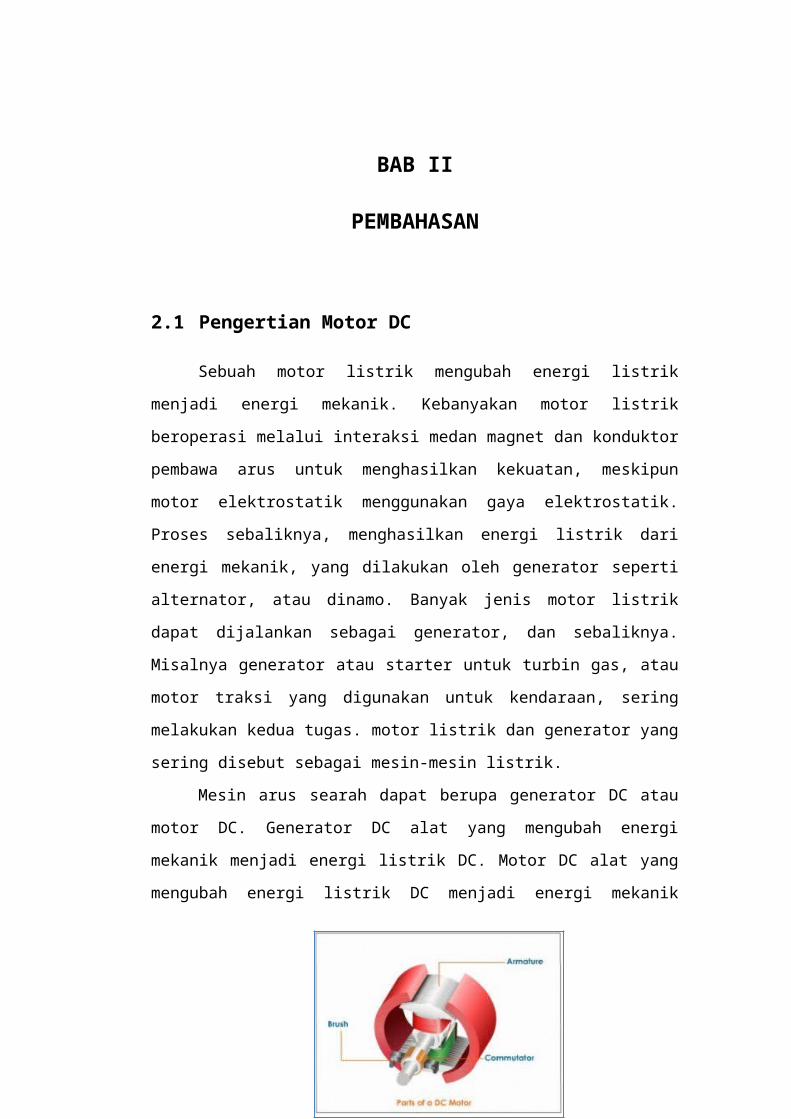
Mesin arus searah dapat berupa generator DC atau motor DC.
Generator DC alat yang mengubah energi mekanik menjadi energi listrik
DC. Motor DC alat yang mengubah energi listrik DC menjadi energi
mekanik putaran. Sebuah motor DC dapat difungsikan sebagai generator
atau sebaliknya generator DC dapat difungsikan sebagai motor DC.
Gambar 1.1 Bagian motor arus searah
3
Gerak atau putaran yang dihasilkan oleh motor arus searah
diperoleh dari interaksi dua buah medan yang dihasilkan oleh bagian
‘jangkar‘ (armature) dan bagian ‘medan‘ (field) dari motor arus searah.
Pada gambar ilustrasi diatas, bagian medan berbentuk suatu kumparan
yang terhubung ke sumber arus searah. Sedangkan bagian jangkar
ditunjukkan sebagai magnet permanen (U-S), bagian jangkar ini tidak
harus berbentuk magnet permanen, bisa juga berbentuk belitan yang akan
menjadi elektro-magnet apabila mendapatkan sumber arus searah.
Sehingga apabila motor arus searah berjenis jangkar belitan, maka harus
tersedia dua sumber arus searah, satu untuk bagian jangkarnya, satu lagi
untuk bagian medannya. Bagian lain yang tidak kalah penting pada motor
arus searah adalah adanya ‘komutator’ (comutator).
Pada motor arus searah kumparan medan disebut stator (bagian
yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang
berputar). Jika tejadi putaran pada kumparan jangkar dalam pada medan
magnet, maka akan timbul tagangan (GGL) yang berubah-ubah arah pada
setiap setengah putaran, sehingga merupakan tegangan bolak-balik.
Stator mempunyai kutub yang menonjol dan ditelar oleh kumparan
medan. Pembagian dari fluks yang terdapat pada daerah celah udara
yang dihasilkan oleh lilitan medan secara simetris yang berada disekitar
daerah tengah kutub kumparan medan. Kumparan penguat dihubungkan
secara seri, letak kumparan jangkar berada pada slot besi yang berada
disebelah luar permukaan jangkar. Pada jangkar terdapat komutator yang
berbentuk silinder dan isolasi sisi kumparan yang dihubungkan dengan
komutator pada beberapa bagian yang berbeda sesuai dengan jenis
belitan.
Konstruksi motor arus searah sama dengan konstruksi generator
arus searah, dan perbedaan diantara keduanya hanya terletak pada
aplikasinya. Jadi, satu perangkat mesin arus searah dapat difungsikan
sebagai generator maupun sebagai motor arus searah.
4
Berdasarkan karakteristiknya, motor arus searah dapat
menghasilkan torsi yang lebih besar dan daerah pengaturan kecepatan
putaran yang luas dibandingkan dengan motor arus bolak balik. Oleh
karena itu sampai sekarang motor arus searah ini banyak digunakan di
industry kertas, tekstil dan industri-industri yang mesin produksinya
memerlukan pengaturan kecepatan putaran yang luas.
Motor DC selain harganya relatif lebih tinggi dari motor induksi,
motor ini juga memerlukan sumber tegangan DC yang pengadaannya
memerlukan suatu alat yang disebut rectifier, mengingat pasokan listrik
yang tersedia berupa tegangan arus bolak-balik. Namun motor arus
searah juga banyak digunakan pada beberapa mesin produksi, mesin
pengangkat ataupun alat transportasi tertentu yang memerlukan
karakteristik dan pengaturan yang khusus.
Adapun keuntungan dari motor arus searah ini adalah memiliki
karakteristik mekanis dan pengaturan yang lebih baik mengingat
karateristik pengaturan kecepatannya mudah diubah-ubah dengan
memberikan catu daya atau pun resistan yang variabel hanya saja pada
pengaturan menggunakan resistan memiliki rugi-rugi yang besar sesuai
dengan tingkat pengaturan kecepatannya, karena semakin diperlukan
pengaturan kecepatan yang rendah semakin besar nilai tahanan yang
disisipkannya.
2.2 Prinsip Kerja Motor Arus Searah
Motor arus searah bekerja berdasarkan interaksi antara medan
magnit yang dihasilkan kutub-kutub magnit dengan medan magnit yang
dihasilkan arus jangkar.
Dari percobaan Oerstedt diketahui bahwa disekitar konduktor yang
dialiri arus listrik, terdapat medan magnit. Dari percobaan Maxwell
diketahui bahwa jika arus listrik yang mengalir pada konduktor arahnya
mendekati kita, maka medan magnit yang terbentuk disekitar konduktor
mempunyai arah berlawanan jarum jam.
5
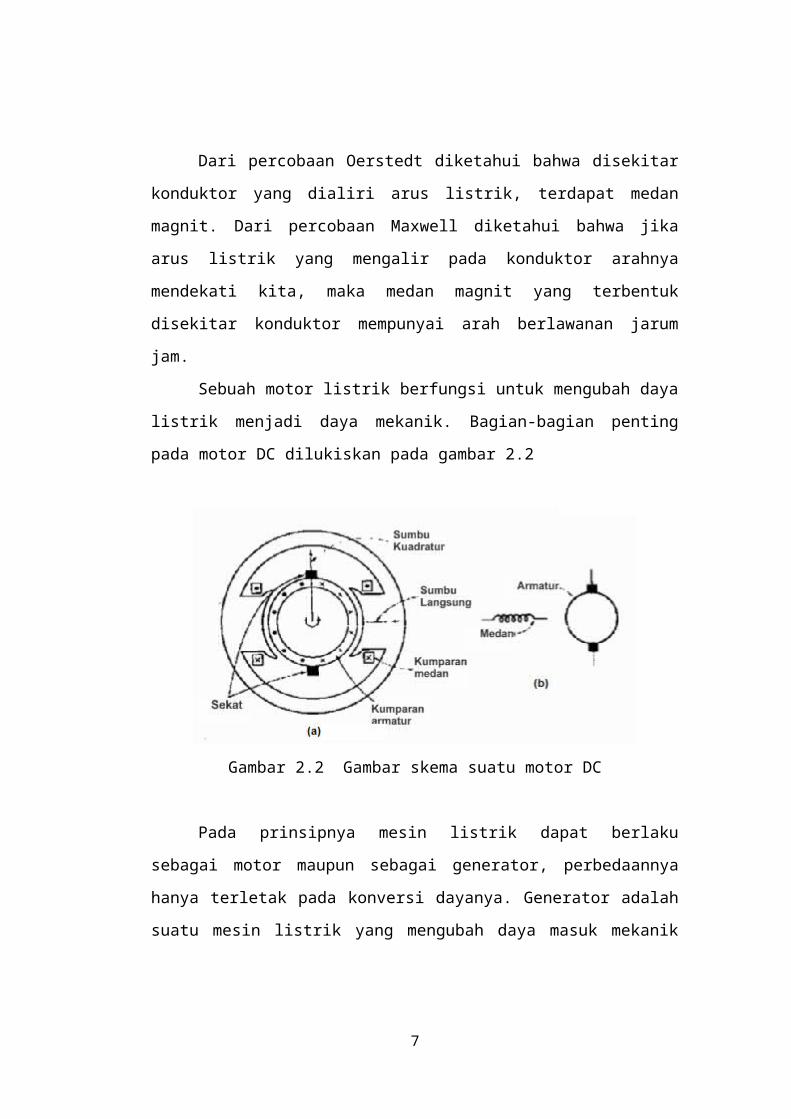
Sebuah motor listrik berfungsi untuk mengubah daya listrik menjadi
daya mekanik. Bagian-bagian penting pada motor DC dilukiskan pada
gambar 2.2
Gambar 2.2 Gambar skema suatu motor DC
Pada prinsipnya mesin listrik dapat berlaku sebagai motor maupun
sebagai generator, perbedaannya hanya terletak pada konversi dayanya.
Generator adalah suatu mesin listrik yang mengubah daya masuk
mekanik menjadi daya keluar listrik, sebaliknya motor mengubah daya
masuk listrik menjadi daya keluar mekanik.
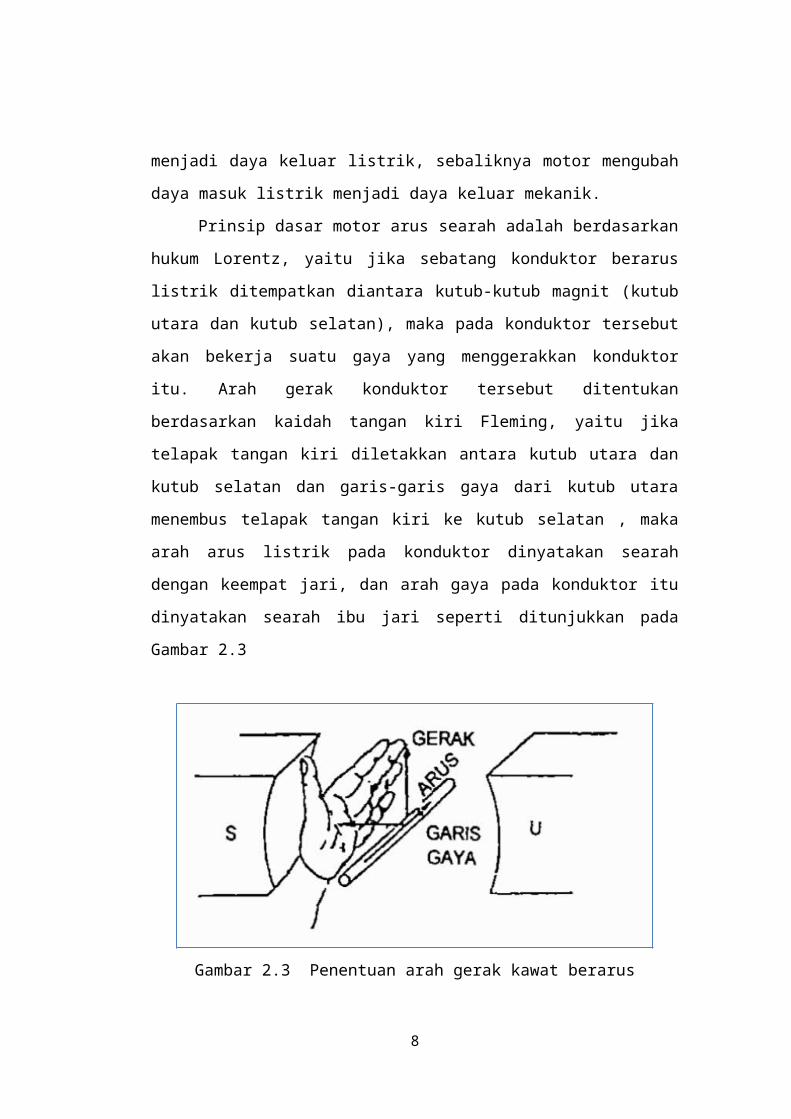
Prinsip dasar motor arus searah adalah berdasarkan hukum
Lorentz, yaitu jika sebatang konduktor berarus listrik ditempatkan diantara
kutub-kutub magnit (kutub utara dan kutub selatan), maka pada konduktor
tersebut akan bekerja suatu gaya yang menggerakkan konduktor itu. Arah
gerak konduktor tersebut ditentukan berdasarkan kaidah tangan kiri
Fleming, yaitu jika telapak tangan kiri diletakkan antara kutub utara dan
kutub selatan dan garis-garis gaya dari kutub utara menembus telapak
tangan kiri ke kutub selatan , maka arah arus listrik pada konduktor
dinyatakan searah dengan keempat jari, dan arah gaya pada konduktor itu
dinyatakan searah ibu jari seperti ditunjukkan pada Gambar 2.3
6
Gambar 2.3 Penentuan arah gerak kawat berarus
Pada kaedah tangan kiri; Ibu jari menunjukkan besaran gaya (F),
jari telunjuk menunjukkan besaran kerapatan medan magnit (B) serta jari
tengah menunjukkan besaran arus listrik (I)
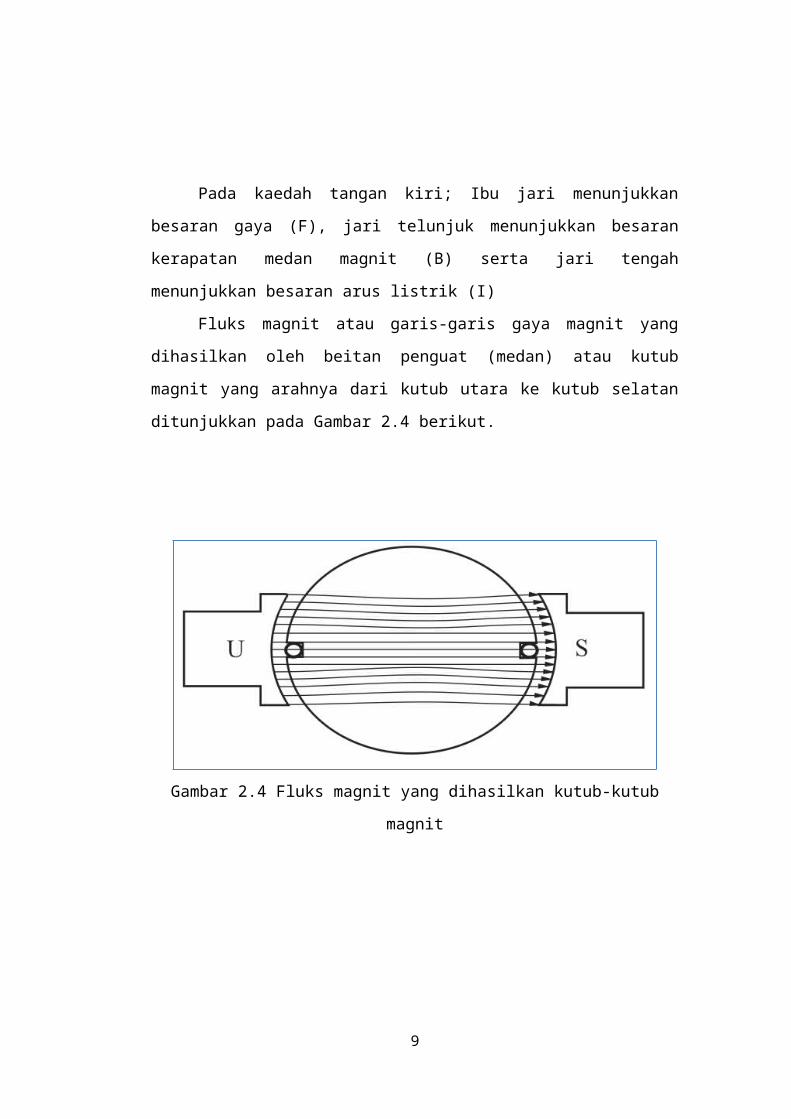
Fluks magnit atau garis-garis gaya magnit yang dihasilkan oleh
beitan penguat (medan) atau kutub magnit yang arahnya dari kutub utara
ke kutub selatan ditunjukkan pada Gambar 2.4 berikut.
Gambar 2.4 Fluks magnit yang dihasilkan kutub-kutub magnit
7
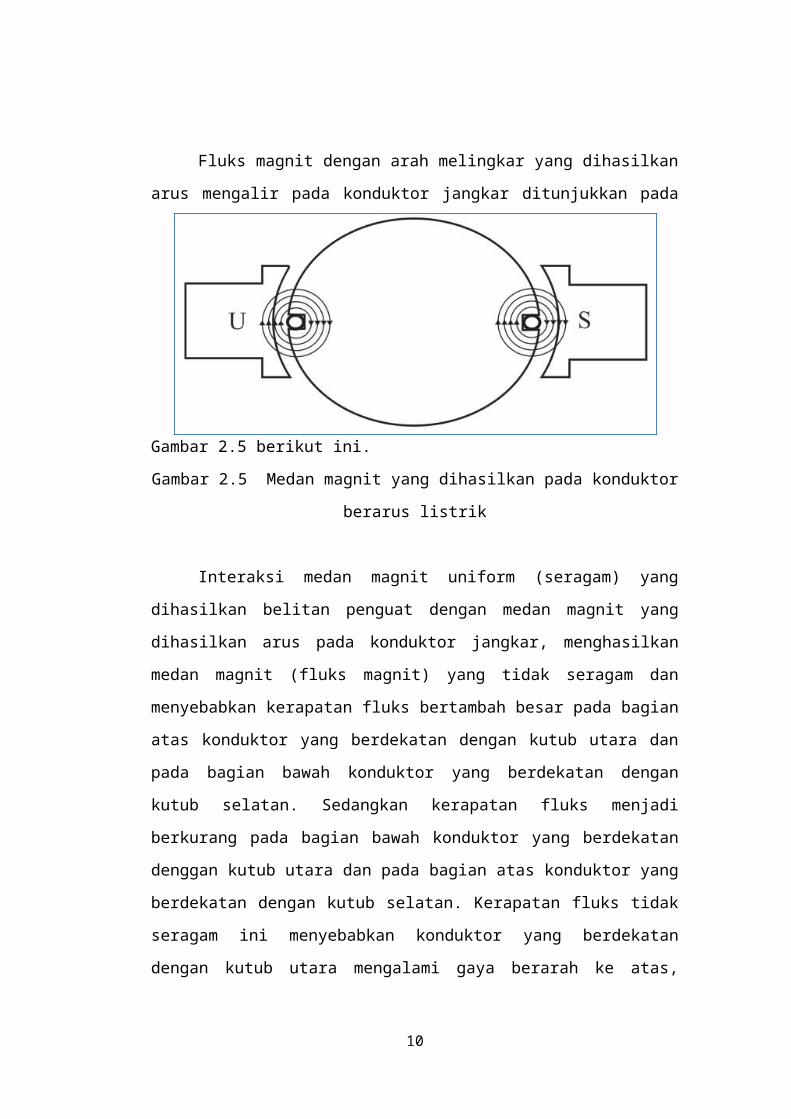
Fluks magnit dengan arah melingkar yang dihasilkan arus mengalir
pada konduktor jangkar ditunjukkan pada Gambar 2.5 berikut ini.
Gambar 2.5 Medan magnit yang dihasilkan pada konduktor berarus listrik
Interaksi medan magnit uniform (seragam) yang dihasilkan belitan
penguat dengan medan magnit yang dihasilkan arus pada konduktor
jangkar, menghasilkan medan magnit (fluks magnit) yang tidak seragam
dan menyebabkan kerapatan fluks bertambah besar pada bagian atas
konduktor yang berdekatan dengan kutub utara dan pada bagian bawah
konduktor yang berdekatan dengan kutub selatan. Sedangkan kerapatan
fluks menjadi berkurang pada bagian bawah konduktor yang berdekatan
denggan kutub utara dan pada bagian atas konduktor yang berdekatan
dengan kutub selatan. Kerapatan fluks tidak seragam ini menyebabkan
konduktor yang berdekatan dengan kutub utara mengalami gaya berarah
ke atas, sedangkan konduktor yang berdekatan dengan kutub selatan
mengalami gaya berarah ke bawah. Kedua gaya tersebut akan
menghasilkan torsi yang memutar jangkar searah jarum jam.
Besar gaya yang bekerja pada konduktor tersebut dinyatakan
dengan :
F = B I ℓ
Dimana :
F = gaya (N)
8
B = kerapatan fluks magnit (Wb/m2)
I = arus yang mengalir pada konduktor
ℓ = panjang konduktor (m)
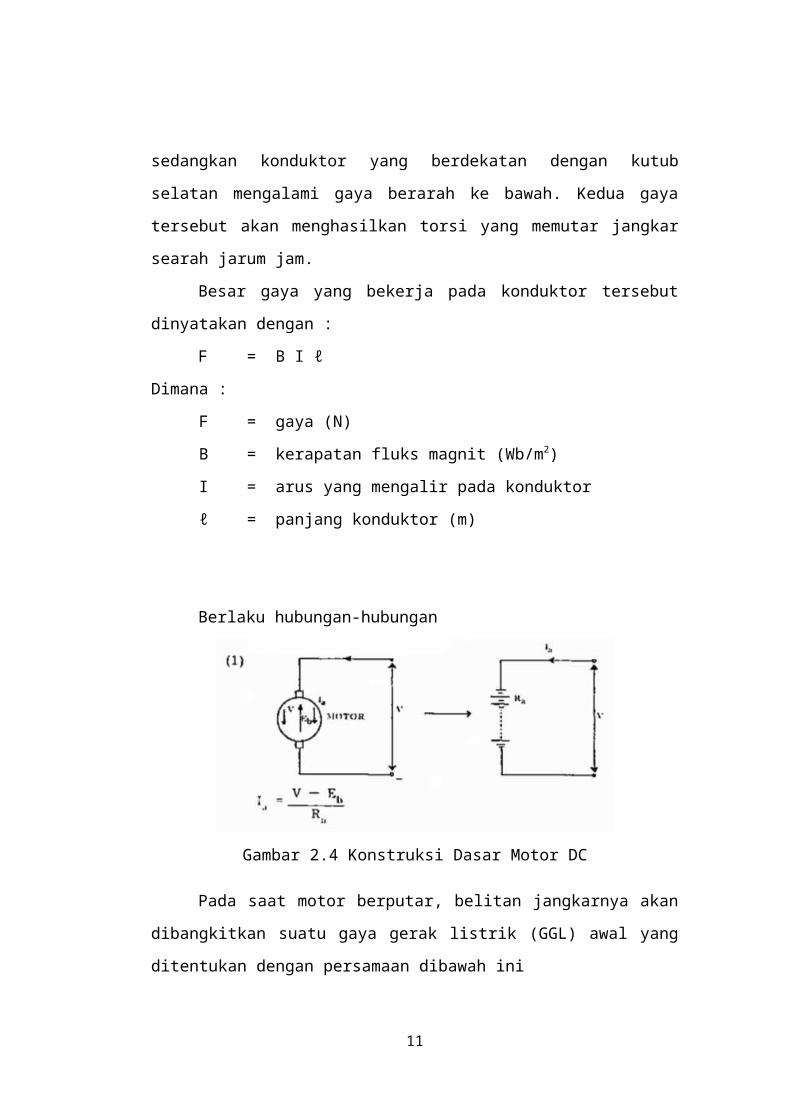
Berlaku hubungan-hubungan
Gambar 2.4 Konstruksi Dasar Motor DC
Pada saat motor berputar, belitan jangkarnya akan dibangkitkan
suatu gaya gerak listrik (GGL) awal yang ditentukan dengan persamaan
dibawah ini
Eb = ɸ ZN × (P A) Volt
Dari persamaan ini dapat diturunkan persamaan kecepatan motor
DC yaitu
N = [EB ɸ] × [a PZ]
regulasi kecepatan = Kec bebannol−Kecbeban penuh
Kecbeban penuh×100 %
9
Dengan menganggap bahwa ujung-ujung motor dicatu dari suatu
sumber tegangan tetap. Pada motor hubungan antara Eb yang
dibangkitkan di armatur dengan tegangan ujung Vt adalah :
Vt – Eb = Ia Ra
Atau
Ia=Vt−EbRa
Dimana Ia sekarang merupakan masukan arus armatur. Tegangan
gerak listrik yang dibangkitkan Ea menjadi lebih kecil dari pada tegangan
ujung Vt, arus armaturnya berlawanan dan momen kakas
elektromagnitnya pada arah perputaran armatur.
Jika pada persamaan sebelumnya dikalikan dengan arus yang
mengalir jangkar didapatkan :
Vt Ia - Eb Ia = (Ia)2 Ra
Dari persamaan tersebut diperioleh tiga buah komponen yaitu :
Vt = daya listrik masukan jangkar
Eb Ia = daya mekanik yang setara dengan daya listrik yang timbul
pada jangkar
(Ia)2 Ra= rugi tembaga pada jangkar
10
2.3 Torsi Motor Arus Searah
Torsi (torque) adalah putaran atau pemuntiran dari suatu gaya
terhadap suatu poros, dan dinyatakan sebagai hasil perkalian gaya itu
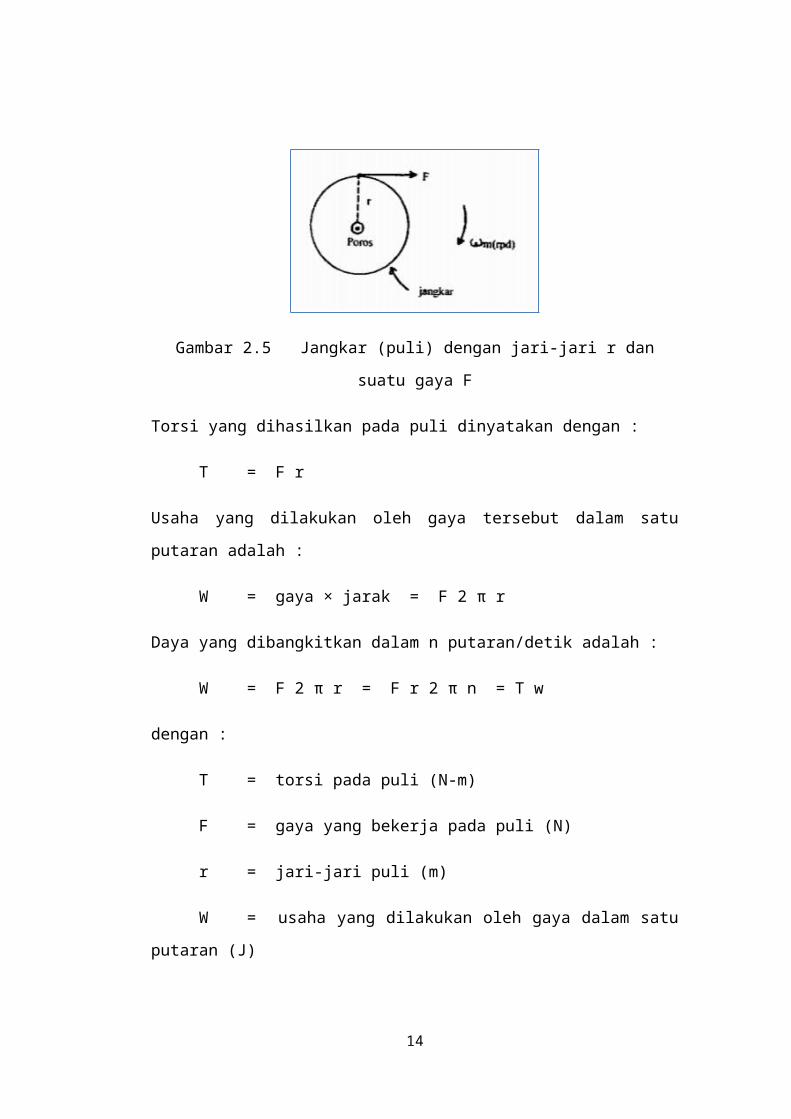
dengan jari-jari lingkaran dimana gaya tersebut bekerja. Berikut ini
ditunjukkan suatu puli (pulley) dengan jari-jari r dan gaya F yang bekerja
pada puli tersebut untuk menghasilkan torsi.
Gambar 2.5 Jangkar (puli) dengan jari-jari r dan suatu gaya F
Torsi yang dihasilkan pada puli dinyatakan dengan :
T = F r
Usaha yang dilakukan oleh gaya tersebut dalam satu putaran adalah :
W = gaya × jarak = F 2 π r
Daya yang dibangkitkan dalam n putaran/detik adalah :
W = F 2 π r = F r 2 π n = T w
dengan :
T = torsi pada puli (N-m)
F = gaya yang bekerja pada puli (N)
r = jari-jari puli (m)
W = usaha yang dilakukan oleh gaya dalam satu putaran (J)
11
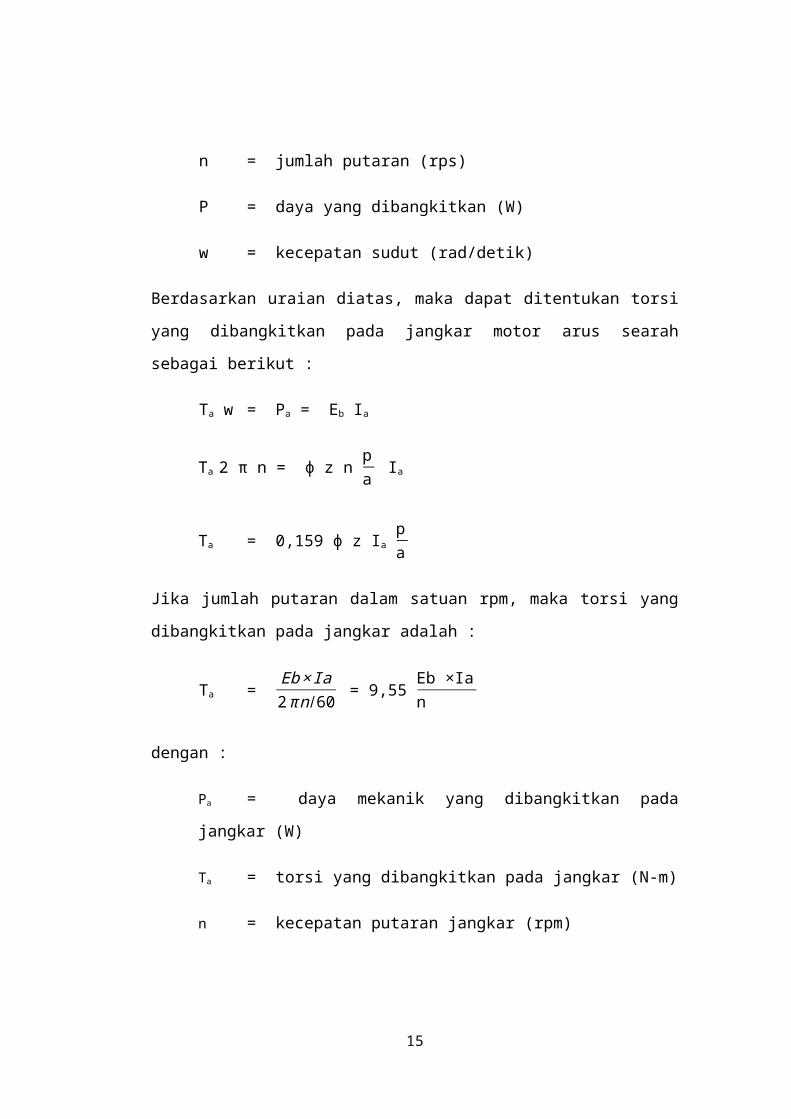
n = jumlah putaran (rps)
P = daya yang dibangkitkan (W)
w = kecepatan sudut (rad/detik)
Berdasarkan uraian diatas, maka dapat ditentukan torsi yang dibangkitkan
pada jangkar motor arus searah sebagai berikut :
Ta w = Pa = Eb Ia
Ta 2 π n = ɸ z n pa
Ia
Ta = 0,159 ɸ z Ia pa
Jika jumlah putaran dalam satuan rpm, maka torsi yang dibangkitkan pada
jangkar adalah :
Ta = Eb×Ia2π n/60
= 9,55 Eb ×Ian
dengan :
Pa = daya mekanik yang dibangkitkan pada jangkar (W)
Ta = torsi yang dibangkitkan pada jangkar (N-m)
n = kecepatan putaran jangkar (rpm)
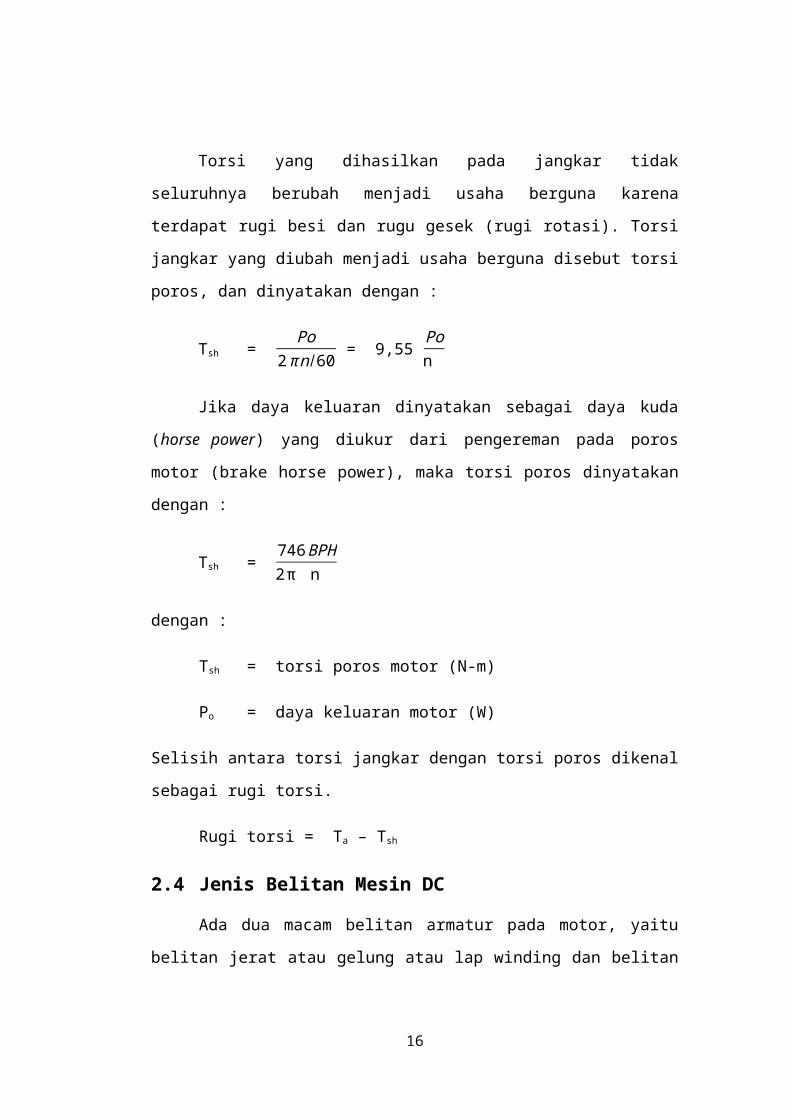
Torsi yang dihasilkan pada jangkar tidak seluruhnya berubah
menjadi usaha berguna karena terdapat rugi besi dan rugu gesek (rugi
rotasi). Torsi jangkar yang diubah menjadi usaha berguna disebut torsi
poros, dan dinyatakan dengan :
Tsh = Po
2π n/60 = 9,55
Pon
12
Jika daya keluaran dinyatakan sebagai daya kuda (horse power)
yang diukur dari pengereman pada poros motor (brake horse power),
maka torsi poros dinyatakan dengan :
Tsh = 746BPH2 π n
dengan :
Tsh = torsi poros motor (N-m)
Po = daya keluaran motor (W)
Selisih antara torsi jangkar dengan torsi poros dikenal sebagai rugi torsi.
Rugi torsi = Ta – Tsh
2.4 Jenis Belitan Mesin DC
Ada dua macam belitan armatur pada motor, yaitu belitan jerat atau
gelung atau lap winding dan belitan gelombang atau wave winding.
Perbedaan pokok diantara keduanya ialah :
- Pada lab winding ujung akhir dari kumparan diletakkan pada
segmen kommutator (disebut lamel) yang berdekatan dengan letak
segmen kommutator awal kumparan,
- Pada wave winding ujung akhir dari kumparan disambungkan pada
segmen kommutator sejauh 360° listrik terhadap segmen
kommutator awal.
Baik lap winding maupun wave ada beberapa macam yaitu,
Simplex, duplex, quadruplex atau m-plex. Sehingga untuk lap winding ada
simplex lap winding, duplex wave winding dan seterusnya. Sedangkan
untuk wave winding ada simplex wave winding, duplex wave winding dan
seterusnya. Tentu saja kalau memakai multiplex kita memerlukan banyak
13
slot. Untuk menghemat jumlah slot, satu slot dapat dipergunakan untuk
menempatkan lebih dari satu kumparan.
Untuk mengurangi kelemahan pada masing-masing belitan baik lap
winding maupun wave winding maka dilakukan bentuk gabungan yaitu lap
winding dan wave winding digunakan bersama-sama dan disebut frog-leg
winding.
2.5 Jenis Motor DC
Pada pembahasan sebelumnya telah dijelaskan bahwa mesin arus
searah dapat dioperasikan baik sebagai generator maupun sebagai
motor ,dengan demikian konstruksi motor arus searah sama dengan
konstruksi generator arus searah. Seperti halnya generator arus searah,
motor DC dapat dibedakan berdasarkan sumber arus penguatnya motor
DC dengan penguatan terpisah dan motor DC penguatan sendiri
14
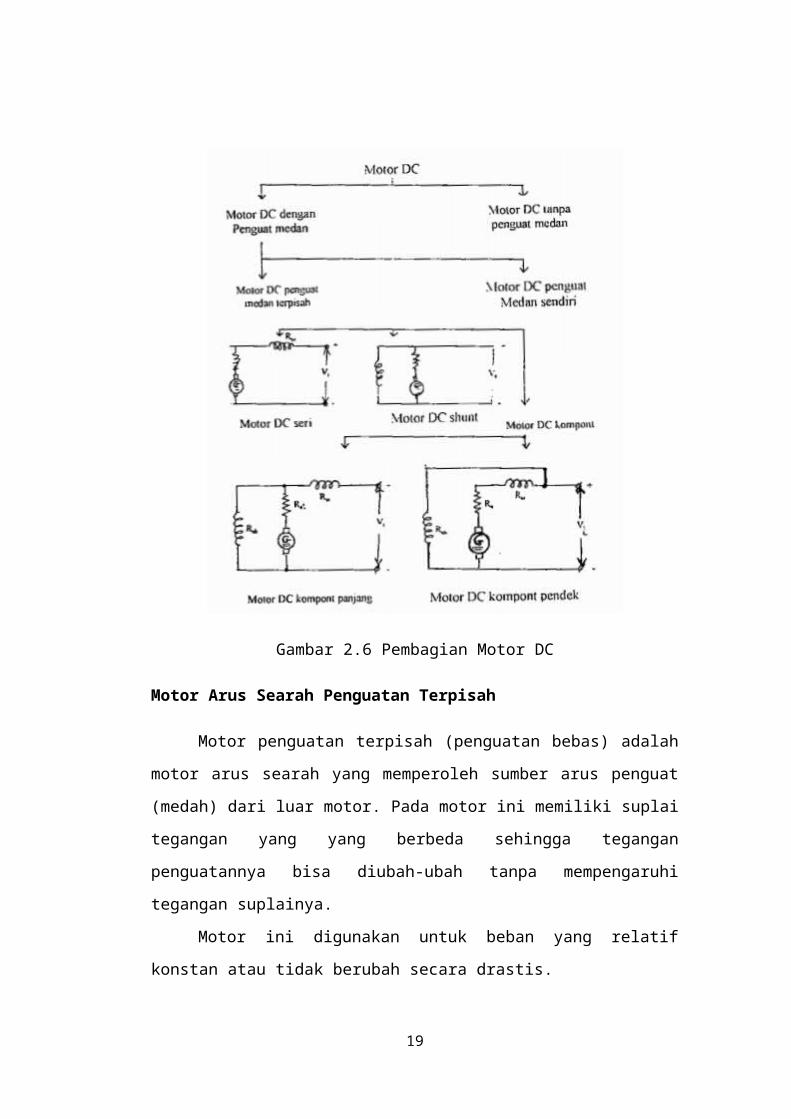
Gambar 2.6 Pembagian Motor DC
Motor Arus Searah Penguatan Terpisah
Motor penguatan terpisah (penguatan bebas) adalah motor arus
searah yang memperoleh sumber arus penguat (medah) dari luar motor.
Pada motor ini memiliki suplai tegangan yang yang berbeda sehingga
tegangan penguatannya bisa diubah-ubah tanpa mempengaruhi tegangan
suplainya.
Motor ini digunakan untuk beban yang relatif konstan atau tidak
berubah secara drastis.
Motor DC penguat terpisah adalah merupakan salah satu dari jenis
motor DC yang dapat menambah kemampuan daya dan kecepatan
karena memiliki fluks medan (Ф) yang dihasilkan oleh kumparan medan,
15
yang terletak secara terpisah dan mempunyai sumber pembangkit
tersendiri berupa tegangan DC.
Sehingga dengan demikian, jenis motor DC penguat terpisah ini
sangat memungkinkan untuk dapat membangkitkan fluks medan (ɸ) bila
dibandingkan dengan menggunakan motor dc magnet permanen. Karena
motor DC penguat terpisah mempunyai fleksibilitas dalam pengontrolan,
seperti yang terdapat pada Gambar 2.7
Pada kenyataannya terdapat dua hal yang dapat mempengaruhi
nilai torsi dan kecepatan dari motor DC jenis penguat terpisah, yaitu
tegangan dan fluks medan. Hal ini dapat kita amati dari persamaan dasar
motor DC, sebagai berikut :
V = Ea + Ia Ra
Jika E = c n ɸ
Maka,
Vt = c n ɸ + Ia Ra
n = Vt - Ia Rac ϕ
Keterangan :
n = Kecepatan
c = Konstanta
Ra = Tahanan Jangkar
Vt = Tegangan jepit motor
Ia = Arus jangkar
ɸ = Fluks magnet
16
Aplikasi secara umum, fluks medan diusahakan tetap dalam kondisi
yang konstan, sedangkan untuk tegangan suplai motor DC ditambah
secara linear, hingga diperoleh kecepatan nominal dari motor. Ketika
kecepatan yang diinginkan tersebut telah diperoleh, langkah kedua adalah
menjaga agar kondisi tersebut tetap stabil tidak melebihi kecepatan
nominal, maka tegangan suplai dibiarkan dalam kondisi konstan dan fluks
pada kumparan medan diperkecil dengan mengurangi arus medan (If)
yang diberikan. Pada keadaan ini terjadi pelemahan kerja pada sisi
kumparan medan ( field Weaking ) dan kecepatan motor DC tersebut
dapat mencapai 50% s/d 100% dari kecepatan nominal motor.
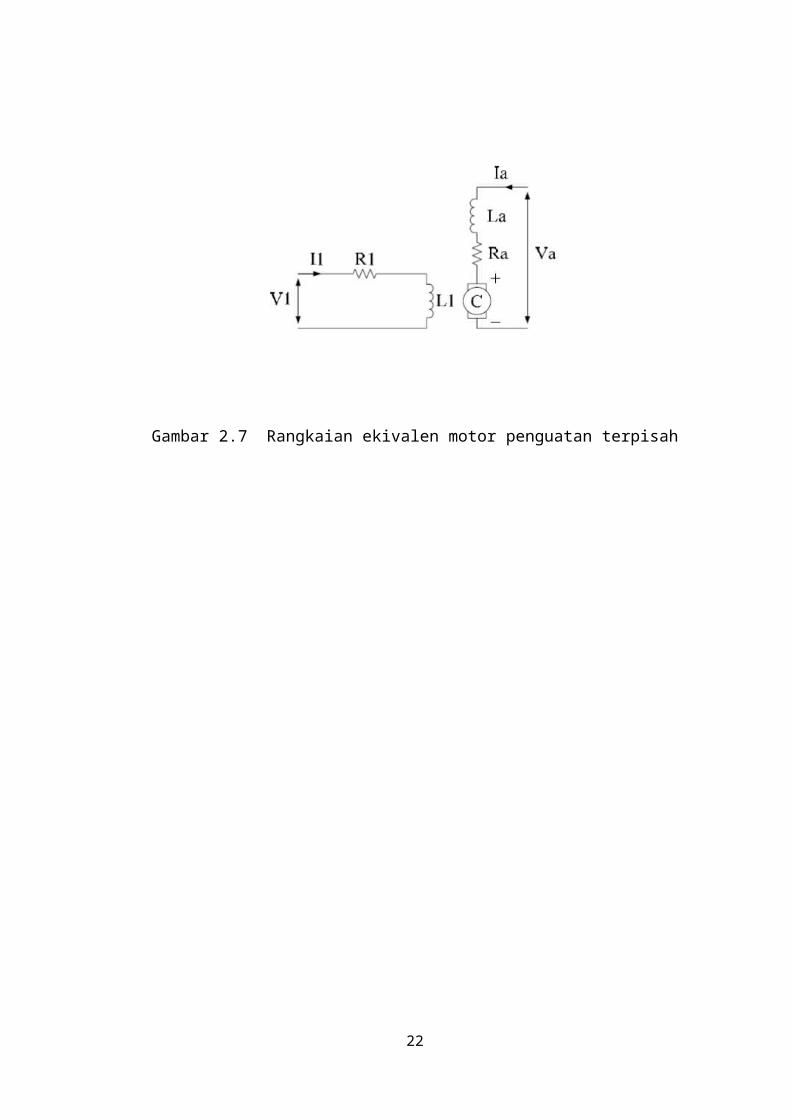
Diagram rangkaian ekivalen motor arus searah penguatan terpisah
ditunjukkan pada gambar berikut ini.
Gambar 2.7 Rangkaian ekivalen motor penguatan terpisah
17
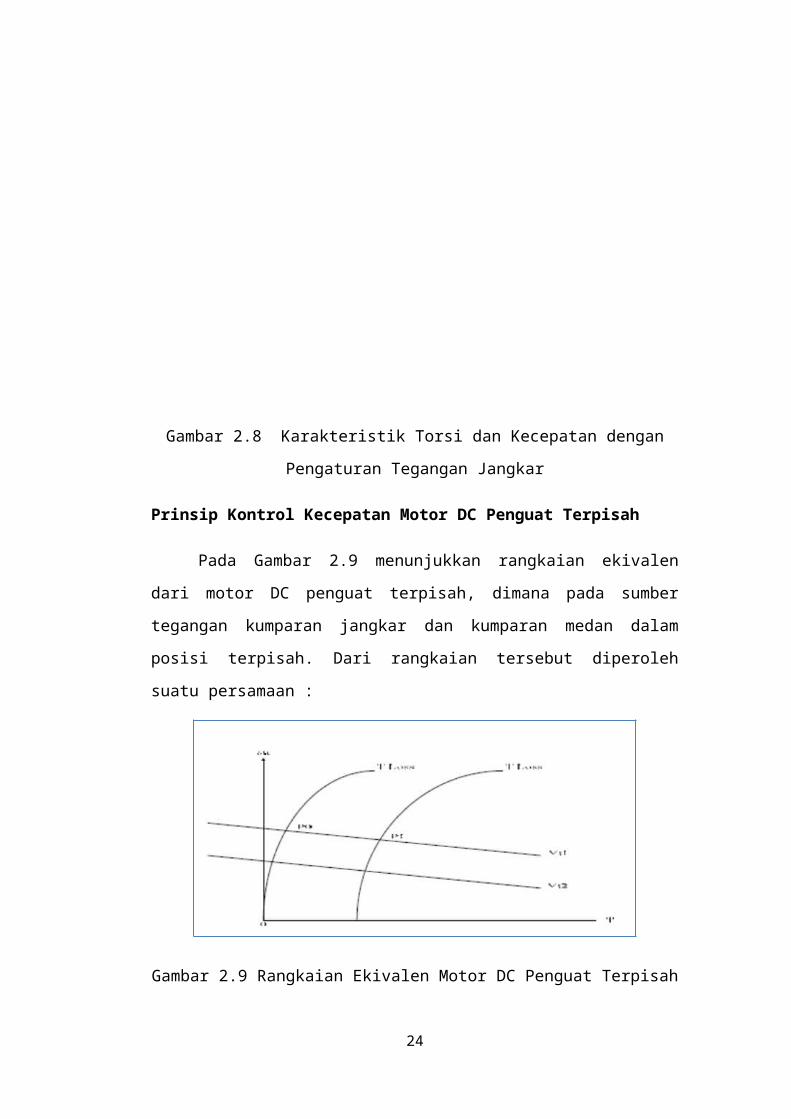
Karakteristik Motor DC dengan Penguat Terpisah
Jika tegangan suplai yang diberikan pada kumparan medan diatur
dalam kondisi konstan pada suatu harga maksimum dari motor, maka
fluks motor (Ф) yang dibangkitkan menjadi besar, sehingga untuk harga Vt
bernilai konstan. Hubungan antara nilai torsi motor dan kecepatan motor
dapat dipresentasikan dengan hubungan antara dua buah garis lurus
dengan kemiringan garis gradien negatif yang kecil dengan perpotongan
yang terletak pada sumbu kecepatan seperti pada Gambar 2.8. Apabila
proses dari motor tersebut dihubungkan pada suatu sistem mekanik
(dalam hal ini motor diberi beban / terbebani) maka sistem akan bekerja
pada poin (P1), yang mana merupakan titik pertemuan antara dua buah
garis.
Sedangkan jika motor tidak dihubung pada suatu mekanik (dalam
hal ini motor tidak diberi beban atau tidak terbebani), motor akan
beroperasi pada posisi poin (P0). Untuk kumparan jangkar yang disuplai
oleh sumber yang terkontrol dari tegangan searah, maka kecepatannya
dapat diatur mulai dari nol sampai harga Vt sama dengan harga tegangan
maksimum. Nilai range dari Vt2 akan mengikuti karakteristik dari tegangan
Vt1.
Gambar 2.8 Karakteristik Torsi dan Kecepatan dengan Pengaturan
Tegangan Jangkar
18
Prinsip Kontrol Kecepatan Motor DC Penguat Terpisah
Pada Gambar 2.9 menunjukkan rangkaian ekivalen dari motor DC
penguat terpisah, dimana pada sumber tegangan kumparan jangkar dan
kumparan medan dalam posisi terpisah. Dari rangkaian tersebut diperoleh
suatu persamaan :
Gambar 2.9 Rangkaian Ekivalen Motor DC Penguat Terpisah
Pada keadaan steady state, turunan terhadap fungsi waktu adalah
nol (0) dan jika variable if, ia, dan ωm konstan, maka diperoleh
persamaan sebagai berikut :
19
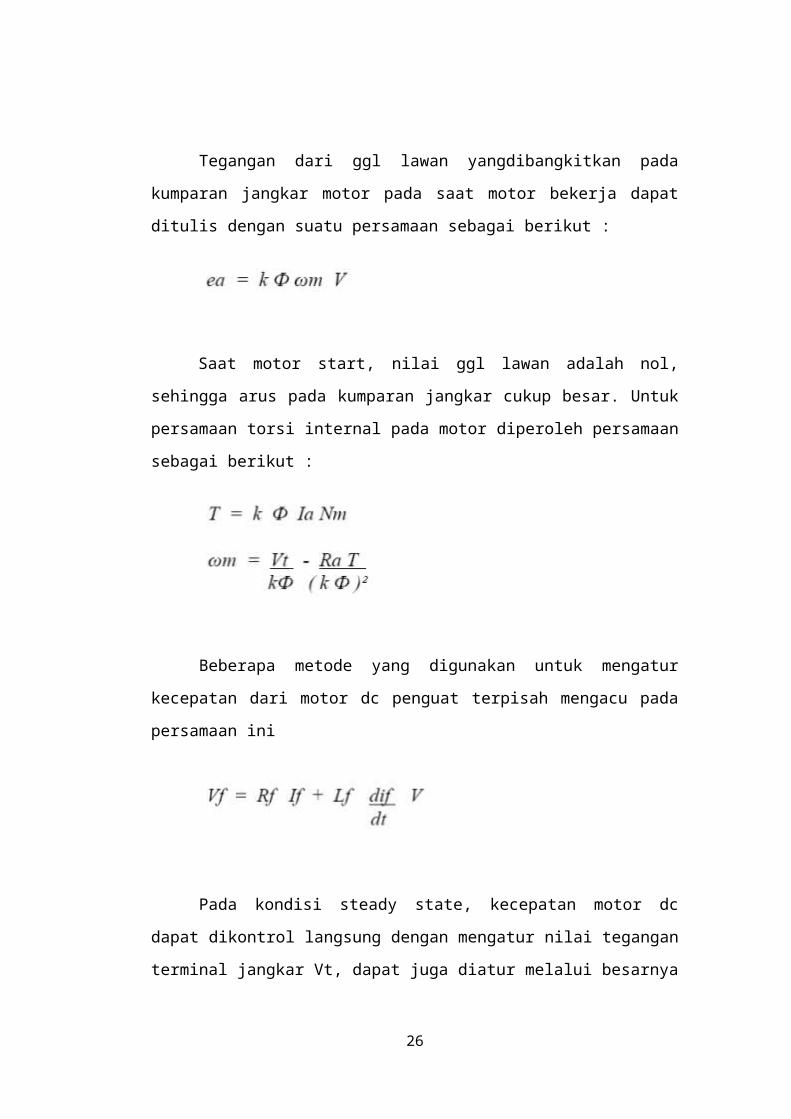
Tegangan dari ggl lawan yangdibangkitkan pada kumparan jangkar
motor pada saat motor bekerja dapat ditulis dengan suatu persamaan
sebagai berikut :
Saat motor start, nilai ggl lawan adalah nol, sehingga arus pada
kumparan jangkar cukup besar. Untuk persamaan torsi internal pada
motor diperoleh persamaan sebagai berikut :
Beberapa metode yang digunakan untuk mengatur kecepatan dari
motor dc penguat terpisah mengacu pada persamaan ini
Pada kondisi steady state, kecepatan motor dc dapat dikontrol
langsung dengan mengatur nilai tegangan terminal jangkar Vt, dapat juga
diatur melalui besarnya fluks (Ф) pada kumparan medan dengan cara
menambah arus medan (If), dari kedua metode ini dapat dikombinasikan
untuk mendapatkan range pengaturan kecepatan yang lebih baik.
20

Gambar 2.10 Model Pengukuran Motor DC Penguatan Terpisah (a) Tanpa Beban (b) Dengan Beban
21
Analisis Karakteristik Motor DC penguat terpisah tanpa beban
Gambar 2.11 Grafik peningkatan kecepatan terhadap perubahan tegangan VT
Gambar 2.12 Grafik Tegangan VT terhadap arus jangkar IA
Karakteristik beban nol dari motor DC penguatan terpisah dapat
dibuat, dimana mesin dijalankan pada kecepatan putar tetap dan emf
beban nol yang dibangkitkan pada ujung-ujung kumparan jangkar diukur
tegangannya dengan voltmeter V.Pengukuran arus penguat medan
dimulai dari nol. Penguatan medan terpisah dapat diatur dengan potensio
meter penguatan arus medan atau If dapat diubah dari nol sampai yang
dikehendaki dan harganya dapat dibaca.
22
Gambar 2.13 Karakteristik dari Motor DC Penguatan Terpisah beban nol
Analisis Karakteristik Motor DC penguat terpisah berbeban
Gambar 2.14 Grafik perubahan kecepatan Rpm terhadap peningkatan daya (watt)
Gambar 2.15 Grafik peningkatan arus jangkar IA terhadap kenaikan daya (watt)
23
Pembebanan dituju pada generator dengan menggunakan lampu
pijar (resistif), dengan daya masing-masing lampu 100 Watt. Setting
tegangan keluaran generator sama dengan tegangan VT.
Dalam perbandingan ini tegangan keluaran generator mengalami
penurunan. Gejala ini disebabkan karena semakin besar daya yang
digunakan akan diikuti oleh penambahan arus sehingga mengalami jatuh
tegangan pada generator. Namun pada motor sebagai pemutar mekanik
generator tidak mengalami jatuh tegangan. Semakin banyak lampu yang
digunakan sebagai beban maka hambata akan semakin secil, dan sesuai
dengan hukum ohm untuk V tetap maka arus I akan semakin besar.
Pada sesi ini keadaan dari motor sebagai pemutar mekanik di set
dengan tegangan VT 200 Volt arus medan tetap 1,5 Ampere dan
kecepatan 1502 Rpm. Semakin besar daya yang dikeluarkan oleh
generator sebagai beban motor, maka kecepatan motor mengalami
penurunan.
Pada motor tidak mengalami jatuh tegangan yang berarti walaupun
generator mendapat pembebanan. Ini karena pada motor DC penguatan
terpisah mendapat dua penguatan terpisah yaitu pada Armatur dan
Medan.
24

BAB III
PENUTUP
3.1 Kesimpulan
Adapun beberapa kesimpulan yang dapat ditarik pada makalah ini
yaitu sebagai berikut :
1. Berdasarkan karakteristiknya, motor arus searah dapat
menghasilkan torsi yang lebih besar dan daerah pengaturan
kecepatan putaran yang luas dibandingkan dengan motor arus
bolak balik
2. Prinsip dasar motor arus searah adalah berdasarkan hukum
Lorentz, yaitu jika sebatang konduktor berarus listrik
ditempatkan diantara kutub-kutub magnit (kutub utara dan kutub
selatan), maka pada konduktor tersebut akan bekerja suatu
gaya yang menggerakkan konduktor itu. Arah gerak konduktor
tersebut ditentukan berdasarkan kaidah tangan kiri Fleming.
3. Motor DC penguat terpisah adalah merupakan salah satu dari
jenis motor DC yang dapat menambah kemampuan daya dan
kecepatan karena memiliki fluks medan (Ф) yang dihasilkan oleh
kumparan medan, yang terletak secara terpisah dan
mempunyai sumber pembangkit tersendiri berupa tegangan DC.
Sehingga dengan demikian, jenis motor DC penguat terpisah ini
sangat memungkinkan untuk dapat membangkitkan fluks
medan (ɸ) bila dibandingkan dengan menggunakan motor dc
magnet permanen. Karena motor DC penguat terpisah
mempunyai fleksibilitas dalam pengontrolan
25
4. Pada kenyataannya terdapat dua hal yang dapat mempengaruhi
nilai torsi dan kecepatan dari motor DC jenis penguat terpisah,
yaitu tegangan dan fluks medan
5. Karakteristik mesin DC dengan penguatan terpisah. Jika
tegangan suplai yang diberikan pada kumparan medan diatur
dalam kondisi konstan pada suatu harga maksimum dari motor,
maka fluks motor (Ф) yang dibangkitkan menjadi besar,
sehingga untuk harga Vt bernilai konstan. Hubungan antara nilai
torsi motor dan kecepatan motor dapat dipresentasikan dengan
hubungan antara dua buah garis lurus dengan kemiringan garis
gradien negatif yang kecil.
26
DAFTAR PUSTAKA
Daniel amaya, Studi Komparasi Motor DC Penguatan Terpisah dan Penguatan Shunt
Motor DC, http://kk.mercubuana.ac.id/elearning/files_modul/ 13020-8- 886267064764 .pdf . diakses pada tanggal 24 Desember 2013
Mulyadi arif, Motor Arus Searah, http://ilmukulistrik.blogspot.com/2013/09/motor-arus-searah.html. diakses tanggal 24 Desember 2013
Motor DC, http://searchglobalonline.blogspot.com/2013/03/motor-dc.html. Diakses tanggal 24 Desember 2013
27