Embed Size (px)
Citation preview
7/24/2019 Mouv Rect Cours
http://slidepdf.com/reader/full/mouv-rect-cours 1/7
Mouvements rectilignes
A.FIZAZI Univ-BECHAR LMD1/SM_ST
64
1/ MOUVEMENT RECTILIGNE UNIFORME ( )Définition : Un point matériel est en mouvement rectiligne niforme si satrajectoire est une droite et son vecteur vitesse constant (donc son vecteuraccélération nul).Equation horaire : on choisit l’axeOX comme repère rectiligne et on fixe lacondition initiale 0;0 x xt == (abscisse initiale).
Partant de la définition ci-dessus, et grâce à une intégration on arrive à exprimer l’abscisse x en fonction du temps :
0 0
0 0 0
0 0 0
. .
0
x t
x t
x t x 0
dxv x v dx v dt dx v dt dt
x v t x-x v t
= = = = =
= =
Dans une dernière étape on obtient l’équation horaire du mouvement rectiligne qui estune fonction du temps de premier degré:
0 0. x v t x= + (4.13)
On appelle x l’abscisse instantanée, et0 l’abscisse initiale.
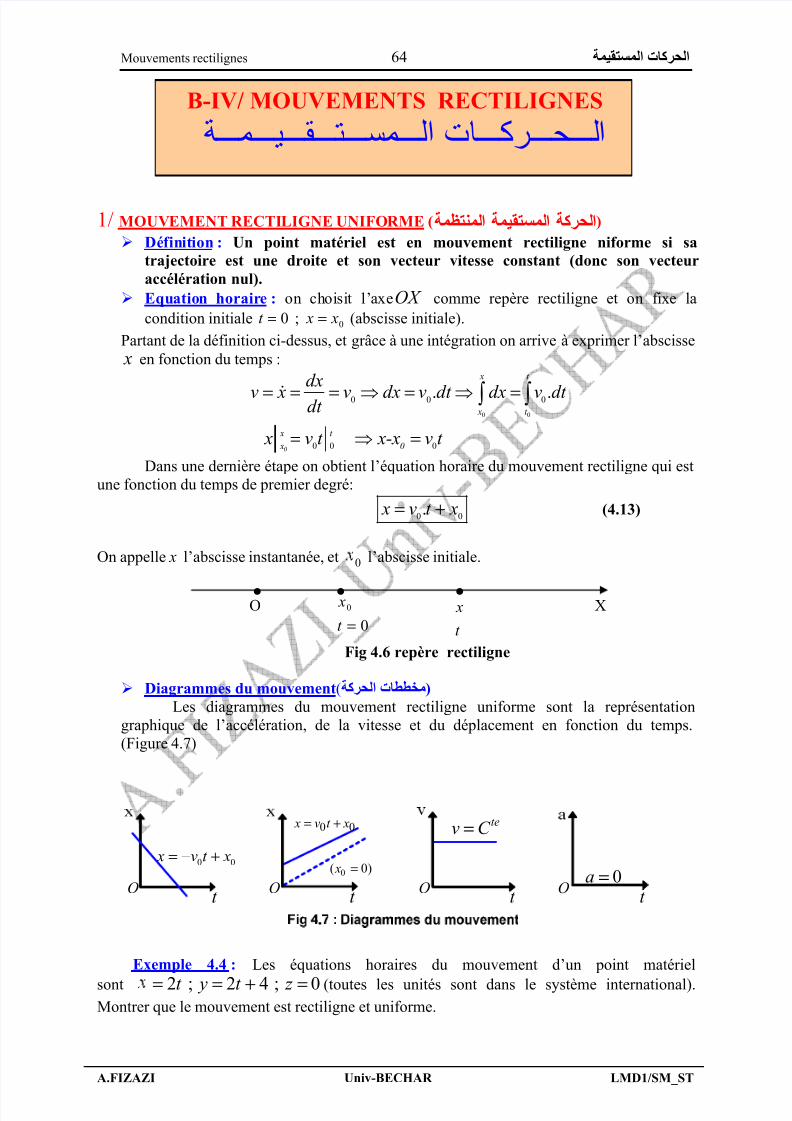
Diagrammes du mouvement ( AABC)Les diagrammes du mouvement rectiligne uniforme sont la représentation
graphique de l’accélération, de la vitesse et du déplacement en fonction du temps.(Figure 4.7)
t 0a =
t
tev C =
t
0 0 x v t x= +
0( 0) x =
t
0 0 x v t x= +
O OO O
Exemple 4.4 : Les équations horaires du mouvement d’un point matérielsont 2 ; 2 4 ; 0t y t z = = + = (toutes les unités sont dans le système international).Montrer que le mouvement est rectiligne et uniforme.
. .. XO0
0
=t
x
t
x
Fig 4.6 repère rectiligne
B-IV/ MOUVEMENTS RECTILIGNES
7/24/2019 Mouv Rect Cours
http://slidepdf.com/reader/full/mouv-rect-cours 2/7
Mouvements rectilignes
A.FIZAZI Univ-BECHAR LMD1/SM_ST
65
Remarque : Dans un repère cartésien, si l’une des coordonnées est nulle le mouvementest dit plan (mais il peut être rectiligne aussi) ; si deux coordonnées sont nulles le mouvementne peut être que rectiligne ; si les trois coordonnées sont différents de zéro, dans ce cas lemouvement est dit spatial.
Réponse : Démontrons d’abord que le mouvement est rectiligne ; pour cela on doitchercher l’équation de la trajectoire. Après élimination du temps entre les deux équationshoraires données on trouve : 4 y x= + équation d’une droite, donc le mouvement estrectiligne.
Pour que ce mouvement soit uniforme il faut que la vitesse soit constante en direction,en sens et en module.
Le vecteur vitesse est 2 2 12 2 2 2 8 2.83v i j v v ms= + = + = =
Ceci implique que le mouvement est uniforme. En définitif le mouvement est rectiligneet uniforme.
2/ MOUVEMENT RECTILIGNE UNIFORMEMENT VARIE
(
)Définition : Le mouvement d’un point matériel est rectiligne uniformément varié si satrajectoire est une droite et son accélération est constante.La vitesse algébrique : En considérant les conditions initiales 0vvt == ;0 (vitesseinitiale), et partant des définitions précédentes, et en intégrant on peut écrire :
t vv
v
v
t
at vadt dvadt dvdt dv
a0 0
00
====
On obtient à la fin l’équation de la vitesse instantanée qui est une fonction du temps de premier degré:
0.0v v t v= +
(14.4) Equation horaire du mouvement : Si on prend 0 x x;t == 0 (abscisse initiale), et partant de ce qui précède on écrit :
+=+=+==
x
x
t
00)0)
0
dt v(at dxdt v(at dxvat dt dx
v ))0
L’équation horaire est donc :
20 0
12
x at v t x= + + (15.4)
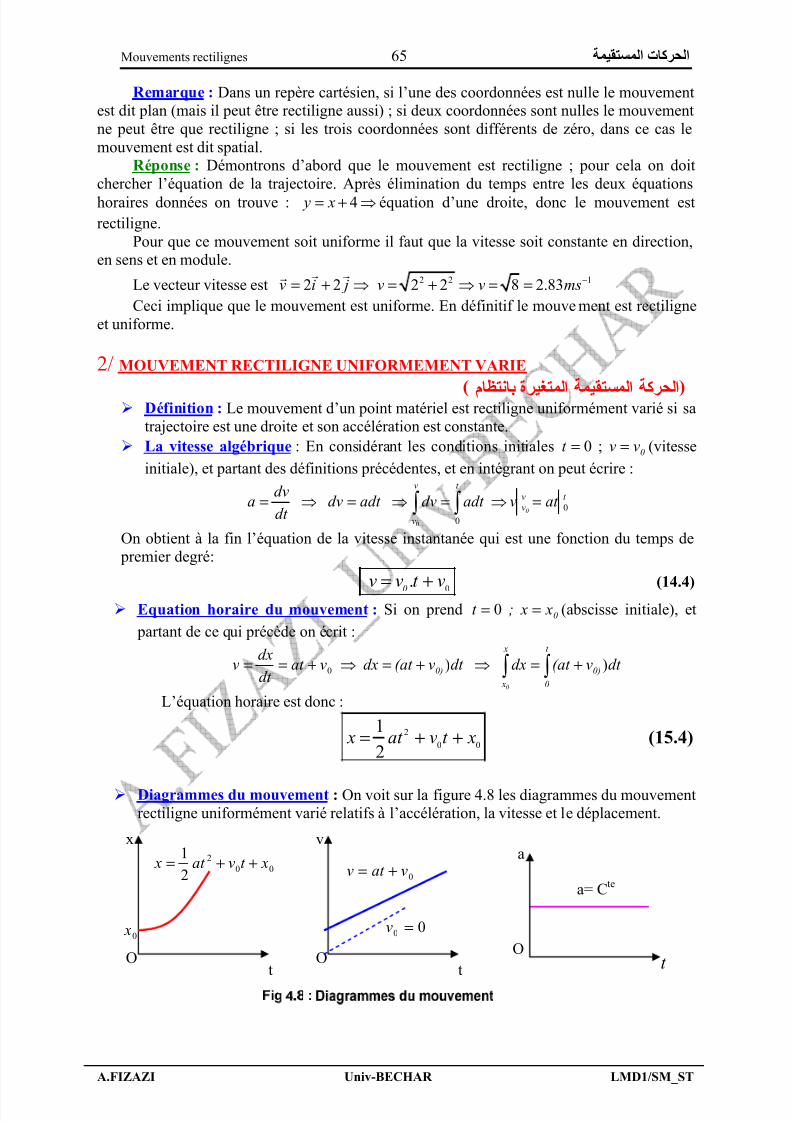
Diagrammes du mouvement : On voit sur la figure 4.8 les diagrammes du mouvementrectiligne uniformément varié relatifs à l’accélération, la vitesse et le déplacement.
O
a
a= C te
v
tO
0vat v +=
00 =v
tO
x
0 x
002
21
xt vat x ++=
t
7/24/2019 Mouv Rect Cours
http://slidepdf.com/reader/full/mouv-rect-cours 3/7
Mouvements rectilignes
A.FIZAZI Univ-BECHAR LMD1/SM_ST
66
Laissons à l’étudiant le soin de démontrer à titre d’exercice que : )(2 02
02 x xavv =
Rappel : Le mouvement rectiligne est accéléré ( ) si 0. >va , et il est retardé( ) si 0. <va
Exemple 4.5 : Un corps ponctuel se déplace suivant l’axeOX avec une vitesse
d’équation : -12 - 6 ( ) ; 0v t ms t = .a/ En déduire l’équation de l’accélération ainsi que l’équation horaire de ce mouvementsachant qu’à l’instant 0 , 5mt x= = . Quelle est la nature du mouvement ? b/ Indiquer les étapes (accélérée et retardée) du mouvement.
Réponse : On obtient l’équation de l’accélération en dérivant l’expression de la vitesse
par rapport au temps : 22 == ms
dt dv
a . L’accélération est constante.
En intégrant l’expression de la vitesse on obtient l’équation horaire :
0 0 20 0
20 0
(2 6) 6 56 ; 0 , 5 5
t t dxv x x vdt x x t dt x t t x x t t t x x
= = + = + = +
= + = = =
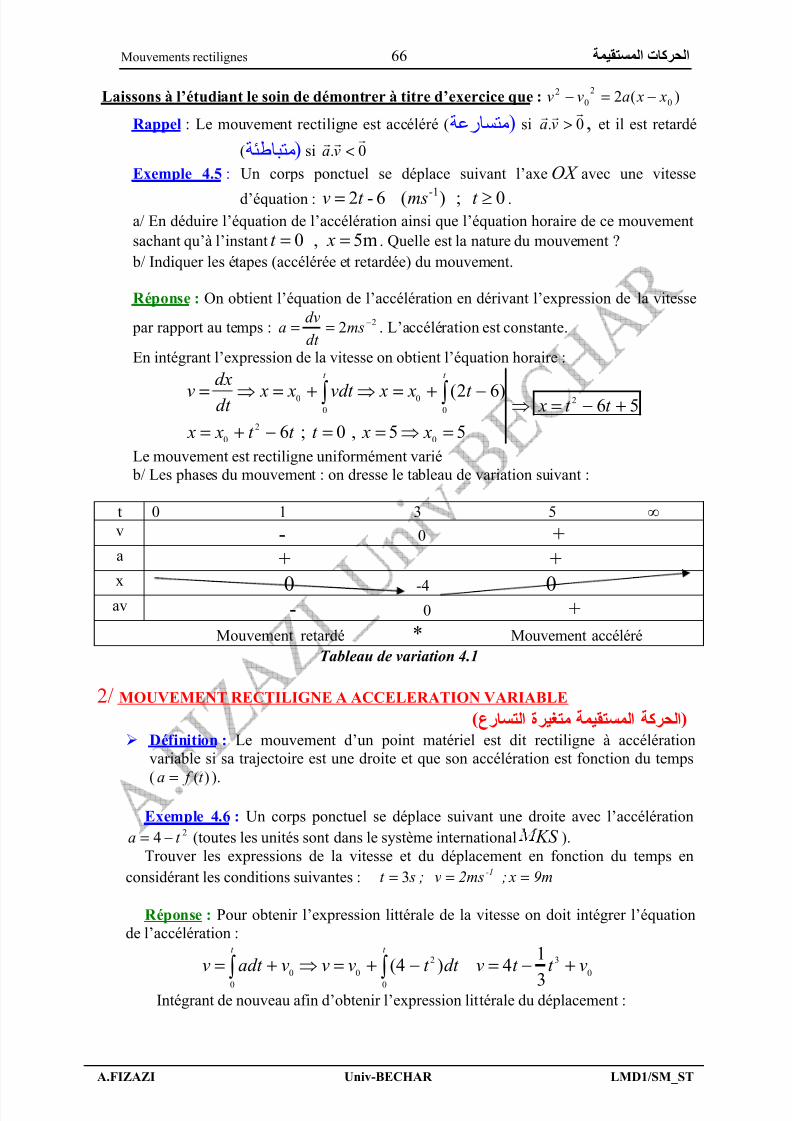
Le mouvement est rectiligne uniformément varié b/ Les phases du mouvement : on dresse le tableau de variation suivant :
0 1 3 5 At- 0 +v
+ +a
0 -4 0x
- 0 +av
Mouvement retardé * Mouvement accéléréTableau de variation 4.1
2/ MOUVEMENT RECTILIGNE A ACCELERATION VARIABLE( )
Définition : Le mouvement d’un point matériel est dit rectiligne à accélérationvariable si sa trajectoire est une droite et que son accélération est fonction du temps( )(t f a = ).
Exemple 4.6 : Un corps ponctuel se déplace suivant une droite avec l’accélération24 t a = (toutes les unités sont dans le système international KS ).
Trouver les expressions de la vitesse et du déplacement en fonction du temps enconsidérant les conditions suivantes : 9m x;2msv; st -1 === 3
Réponse : Pour obtenir l’expression littérale de la vitesse on doit intégrer l’équationde l’accélération :
30
143
v t t v= +2
0 00 0
(4 )t t
v adt v v v t dt = + = + Intégrant de nouveau afin d’obtenir l’expression littérale du déplacement :
7/24/2019 Mouv Rect Cours
http://slidepdf.com/reader/full/mouv-rect-cours 4/7
Mouvements rectilignes
A.FIZAZI Univ-BECHAR LMD1/SM_ST
67
4 20 0 0
0
1 212
t
x x vdt x t t v t x= + = + +
Il nous reste à déterminer l’abscisse et la vitesse initiales du corps. D’après lesdonnées, on remplace dans les expressions obtenues précédemment le temps par 3t s= pourtrouver l’abscisse et la vitesse initiales :
10
33 14 0t s x m ; v ms= = =
En fin de compte, les expressions de la vitesse et du déplacement sont:
314 13
v t t= 41 312 4
22t t t= +
3/ MOUVEMENT RECTILIGNE SINUSOIDAL ( )
Définition : Le mouvement d’un point matériel est rectiligne sinusoïdal si sonéquation horaire peut s’écrire sous la forme : .cos( . )m x X t = + (16.4)
Ou même ).sin(. += t X x m
m X : Amplitude ou élongation maximale(K LMN O A PQ R ), son unité est le mètre. x : Élongation ou abscisse instantanée (KL T O A PQ TU V), elle varie entre deuxvaleurs extrêmes : 1 cos( ) 1 m mt X x X + + + , son unité est le mètre.
: Pulsation du mouvement ( WXY), son unité est le radian/seconde. : Phase initiale( Z [ \] V ̂PQ KZ [ \] _`A ), son unité est leradian.t + : Phase instantanée( L T V ̂PQ KL T _`A ), son unité est leradian.
La vitesse : En dérivant l’équation horaire on obtient l’expression de la vitesse
instantanée : dxv x
dt = =
. sin( )mv X t = + (17.4)Cette vitesse varie entre deux valeurs extrêmes :
1 sin( ) 1 . .m mt X v X + + +
L’accélération : En dérivant l’équation de la vitesse on obtient l’expression del’accélération instantanée :
dva x v
dt = = =
2 cos( . )ma X t = + (18.4)
Cette vitesse varie entre deux valeurs extrêmes : 2 2
m m X a X +
Nous pouvons écrire l’expression de l’accélération sous la forme :2 .a x = (19.4)
L’accélération est proportionnelle à l’élongation avec un signe opposé.
7/24/2019 Mouv Rect Cours
http://slidepdf.com/reader/full/mouv-rect-cours 5/7
Mouvements rectilignes
A.FIZAZI Univ-BECHAR LMD1/SM_ST
68
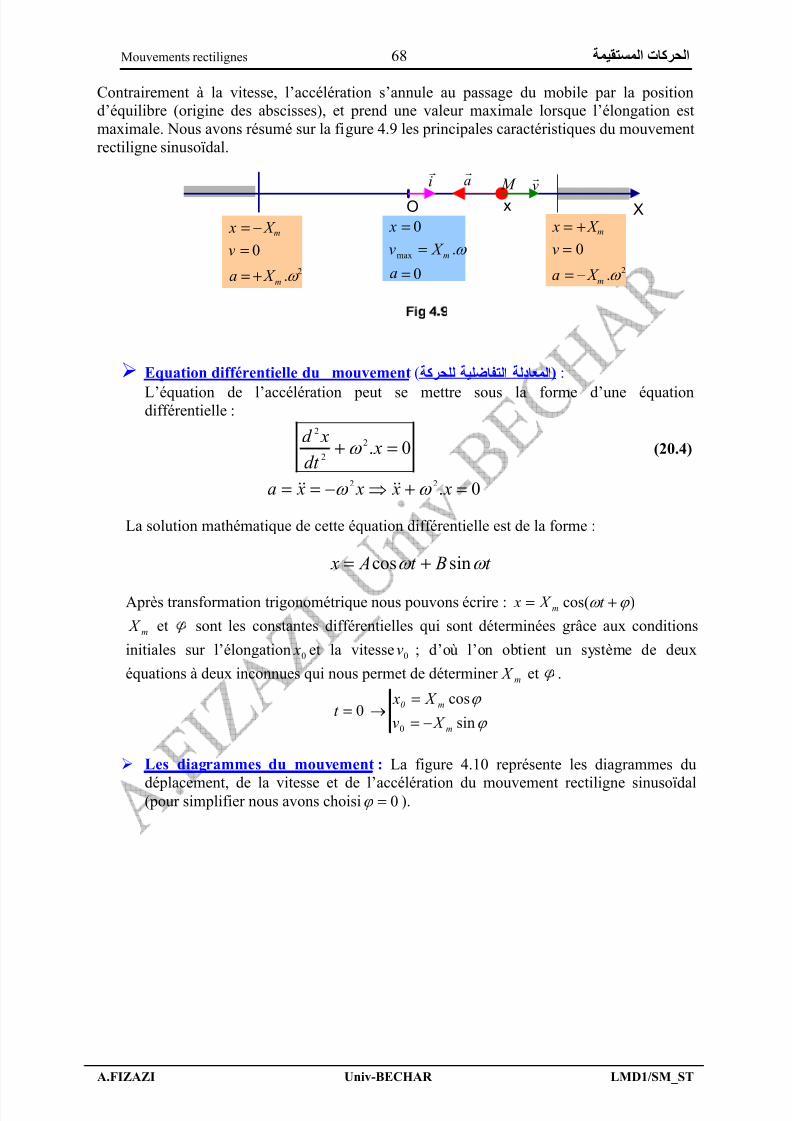
Contrairement à la vitesse, l’accélération s’annule au passage du mobile par la positiond’équilibre (origine des abscisses), et prend une valeur maximale lorsque l’élongation estmaximale. Nous avons résumé sur la figure 4.9 les principales caractéristiques du mouvementrectiligne sinusoïdal.
O
2.
0
m
m
X a
v X x
+=
=
=
0
.0
max
=
=
=
a
X v x
m
2.
0
m
m
X a
v X x
=
=
+=
vai
X
M x
9.4
Equation différentielle du mouvement ( ) :
L’équation de l’accélération peut se mettre sous la forme d’une équationdifférentielle : 2
2
2 . 0d x
xdt
+ = (20.4)
2 2 . 0a x x x x = = + =
La solution mathématique de cette équation différentielle est de la forme :
cos sin x A t B t = +
Après transformation trigonométrique nous pouvons écrire : )cos( += t X x m
m X et sont les constantes différentielles qui sont déterminées grâce aux conditions
initiales sur l’élongation 0 x et la vitesse 0v ; d’où l’on obtient un système de deux
équations à deux inconnues qui nous permet de déterminer m X et .
sin
cos0
0 m
m0
X v
X xt
=
==
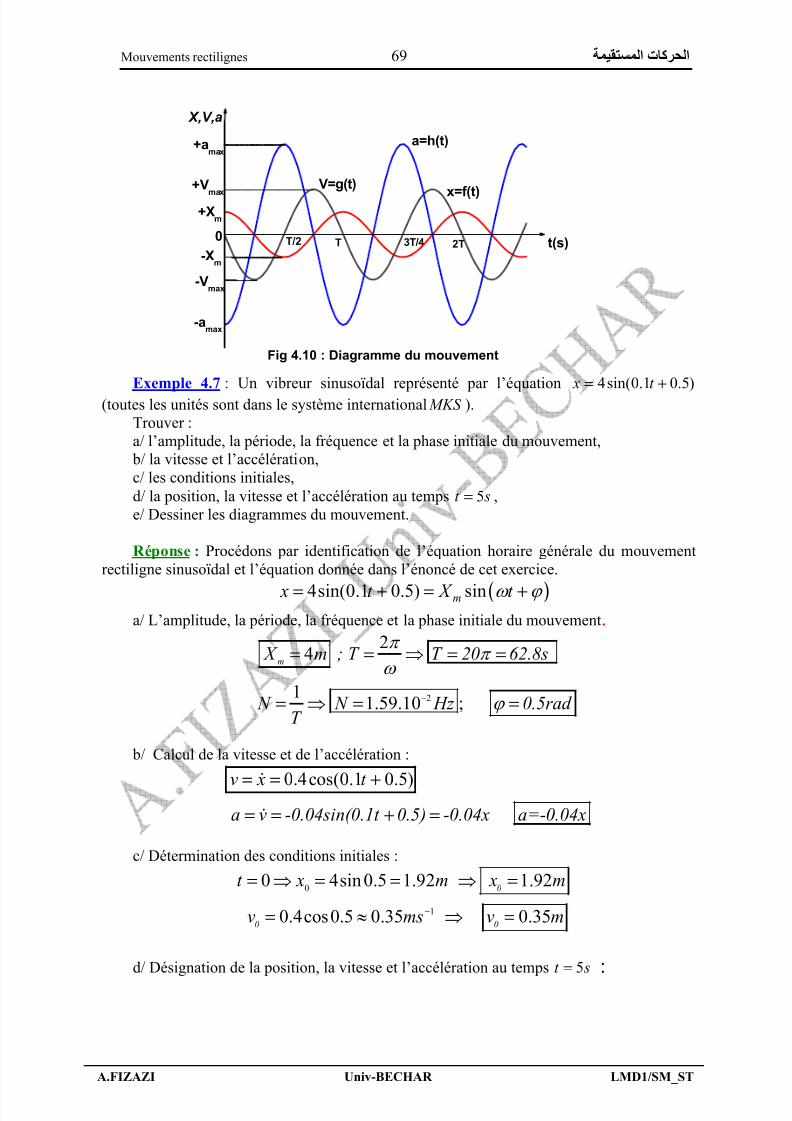
Les diagrammes du mouvement : La figure 4.10 représente les diagrammes du
déplacement, de la vitesse et de l’accélération du mouvement rectiligne sinusoïdal(pour simplifier nous avons choisi 0= ).
7/24/2019 Mouv Rect Cours
http://slidepdf.com/reader/full/mouv-rect-cours 6/7
Mouvements rectilignes
A.FIZAZI Univ-BECHAR LMD1/SM_ST
69
x=f(t)
a=h(t)
V=g(t)
2T3T/4TT/2
-Vmax
-Xm
+Xm
+Vmax
+amax
-a max
t(s)0
X,V,a
Fig 4.10 : Diagramme du mouvement
Exemple 4.7 : Un vibreur sinusoïdal représenté par l’é quation )5.01.0sin(4 += t x(toutes les unités sont dans le système international MKS ).
Trouver :a/ l’amplitude, la période, la fréquence et la phase initiale du mouvement,
b/ la vitesse et l’accélération,c/ les conditions initiales,d/ la position, la vitesse et l’accélération au temps st 5= ,e/ Dessiner les diagrammes du mouvement.
Réponse : Procédons par identification de l’équation horaire générale du mouvementrectiligne sinusoïdal et l’équation donnée dans l’énoncé de cet exercice.
( )4sin(0.1 0.5) sinm x t X t = + = +
a/ L’amplitude, la période, la fréquence et la phase initiale du mouvement .
2
24
11.59.10 ;
m X m ; T T 20 62.8s
N N Hz 0.5rad T
= = = =
= = =
b/ Calcul de la vitesse et de l’accélération :
0.4cos(0.1 0.5)v x ta v -0.04sin(0.1t 0.5) -0.04x a=-0.04x
= = +
= = + =
c/ Détermination des conditions initiales :
0
1
0 4sin 0.5 1.92 1.92
0.4cos0.5 0.35 0.35
0
0 0
t x m x m
v ms v m
= = = =
= =
d/ Désignation de la position, la vitesse et l’accélération au temps st 5= :

7/24/2019 Mouv Rect Cours
http://slidepdf.com/reader/full/mouv-rect-cours 7/7
Mouvements rectilignes
A.FIZAZI Univ-BECHAR LMD1/SM_ST
70
5 :-1
-2
t s x 4sin(0.5 0.5) x 3.36m
v 0.4cos1 v 0.22ms
a -0.04sin1 a 0.034ms
= = + =
= =
= =
e/ Diagramme du mouvement : Nous conseillons à l’étudiant de tracer lui-même cesdiagrammes et de ne pas se contenter de jeter un simple coup d’œil sur la figure 4.11.
t+3T/4
t+T
t+T/2t
a=-0.04sin(0.5t+0.5)
v=2cos(0.5t+0.5)
x=4sin(0.5t+0.5)
x,v,a
t(s)
-4
-2
2
4
0