Embed Size (px)
Citation preview
Musica con Automatas Celulares
Fabian Ricardo Munoz Reyes
Universidad Nacional de Colombia
Facultad de Ciencias, Departamento de Matematicas
Bogota, Colombia
Ano 2013

Musica con Automatas Celulares
Fabian Ricardo Munoz Reyes
Tesis o trabajo de grado presentada(o) como requisito parcial para optar al tıtulo de:
Magister en Ciencias - Matematicas
Director:
Gustavo N. Rubiano O.
Lınea de Investigacion:
Topologıa Fractal y Automatas Celulares
Universidad Nacional de Colombia
Facultad de Ciencias, Departamento de Matematicas
Bogota, Colombia
Ano 2013


Dedicado a:
Mi familia que tanto me ha apoyado en mi
camino, que han estado siempre hasta en los
momentos mas complicados, a mi novia quien
ha sido la persona que le ha dado un nuevo
sentido a mi vida, por la cual dıa a dıa deseo ser
mejor persona y al profesor Gustavo Rubiano
quien me ha compartido una gran cantidad de
conocimiento y desperto mucho mas mi amor
hacia los conjuntos fractales.
“La felicidad humana generalmente no se
logra con grandes golpes de suerte, que pueden
ocurrir pocas veces, sino con pequenas cosas que
ocurren todos los dıas.”
Benjamin Franklin

VII
Resumen
Los automatas celulares fueron introducidos iniciando los anos 50 por el matematico John
Von Neumann quien pretendıa generar una maquina con la propiedad de auto manufacturar-
se, pero al no contar con elementos fısicos y economicos para llevar a cabo su objetivo, deci-
dio usar un modelo abstracto el cual consiste en ubicar sobre cada cuadro de una cuadrıcula
un elemento de un conjunto finito, y segun el y los elementos en los cuadrados adyacentes,
evolucionan o cambian de estado con el tiempo, y lo que se busca es determinar el tipo de
comportamiento de evolucion de todos los elementos de la cuadrıcula con el tiempo.
Por la simpleza de su descripcion y la posibilidad de generar comportamientos complejos,
estos se han usado para modelar sistemas fısicos, quımicos y biologicos, como el comporta-
miento de un grupo de microbios en una gota de agua. Sin embargo no solo a nivel cientıfico
se encuentra su aplicacion, en la composicion de musica mediante sistemas digitales y re-
masterizacion de sonidos es posible trabajar con ellos, mediante la identificacion de estados
en una grilla con notas musicales.
Palabras clave: evolucion, caos, frecuencia.
Abstract
Cellular Automata were introduced by the mathematician John Von Neumann in the 50´s ,
he wanted to create a machine which can manufactured itself, but he did not get the physical
and economic resources to make it, so he decided using an abstract model. The idea is to
assign at each square on a grid one of a finite state numbers. Each square evolves according
the state of neighbour squares through the time, and the studies are focused to understand
the behaviour of Cellular Automaton, it could stabilize in a finite time, or it could be possible
its behaviour become periodic or chaotic.
By the simplicity of theirs description and the possibility to generate complex behaviours,
they are having used to model physical, chemistry and biology systems as the behaviour of
microbes on a water drop. However it is not just for scientific topics, it can be used on the
composition digital system music or developing sounds made. An example is to assign at
each state on a grid a musical note.
Keywords: evolution, chaos, frequency
Indice general
Resumen VII
Lista de Figuras IX
Lista de Tablas X
1. Introduccion 1
2. Automatas Celulares 2
2.1. Historia de los Automatas Celulares . . . . . . . . . . . . . . . . . . . . . . . 2
2.2. Estructura de los Automatas Celulares . . . . . . . . . . . . . . . . . . . . . 4
2.2.1. Estado y vecindad . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.2. Evolucion en un automata . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.3. Automatas Celulares vistos como sistemas dinamicos . . . . . . . . . 8
2.2.4. Clasificacion de Wolfram . . . . . . . . . . . . . . . . . . . . . . . . . 9
3. Generalizacion de Automatas Celulares 11
3.1. Definiciones basicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2. Automatas celulares sobre Z . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3. Automatas celulares bidimensionales . . . . . . . . . . . . . . . . . . . . . . 16
3.4. Reglas semitotalısticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4. Automatas celulares y musica 22
4.1. Musica con automatas lineales . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.2. Musica con automatas 2−dimensionales . . . . . . . . . . . . . . . . . . . . . 27
4.3. Automatas celulares con reglas semitotalısticas . . . . . . . . . . . . . . . . . 33
5. Conclusiones y recomendaciones 39
5.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.2. Recomendaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
A. Codigos de programacion para automatas lineales 41
A.1. Sonido Automata Celular Lineal 1 . . . . . . . . . . . . . . . . . . . . . . . . 41
A.2. Sonido Automata Celular Lineal 2 . . . . . . . . . . . . . . . . . . . . . . . . 42
Indice general IX
A.3. Sonido Automata Celular Lineal 3 . . . . . . . . . . . . . . . . . . . . . . . . 43
B. Codigos para automatas 2−dimensionales 48
B.1. Ejemplo 1 vecindad de Moore . . . . . . . . . . . . . . . . . . . . . . . . . . 48
B.2. Ejemplo 2 vecindad de Moore . . . . . . . . . . . . . . . . . . . . . . . . . . 49
B.3. Ejemplo 1 Vecindad de Neumann . . . . . . . . . . . . . . . . . . . . . . . . 51
B.4. Ejemplo 2 Vecindad de Neumann . . . . . . . . . . . . . . . . . . . . . . . . 53
C. Reglas Semitotalısticas 56
C.1. Reglas Semitotalıstica Ejemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . 57
C.2. Reglas Semitotalısticas Ejemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . 59
C.3. Reglas Semitotalısticas ejemplo 3 . . . . . . . . . . . . . . . . . . . . . . . . 60
D. Palabras de Fibonacci 63
Indice de figuras
2-1. Vecindad de Neumann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2-2. Ejemplo de Game of the Life propuesto por Jhon Conway . . . . . . . . . . 4
2-3. Ejemplo de una vecindad de tamano 2r + 1 para un ACL . . . . . . . . . . . 5
2-4. Cinta cerrada para definir las vecindades de los extremos. . . . . . . . . . . . 5
2-5. Ejemplo de la evolucion de un ACL(k,1) en dos tiempos . . . . . . . . . . . . 6
2-6. Evolucion de las i−esimas celulas de un ACL(k, r) para r = 0,5. . . . . . . . 6
2-7. Regla 8 para dos condiciones iniciales distintas . . . . . . . . . . . . . . . . . 9
2-8. Reglas 179 (Izquierda) y 244 (Derecha) . . . . . . . . . . . . . . . . . . . . . 9
2-9. Reglas 75 (Izquierda) y 105 (Derecha) . . . . . . . . . . . . . . . . . . . . . . 10
2-10.Reglas 57 (Izquierda) y 109 (Derecha) . . . . . . . . . . . . . . . . . . . . . . 10
3-1. Vecindades de Neumann (izquierda) y de Moore (derecha) de radio 1. . . . . 16
3-2. Vecindades de Neumann (izquierda) y Moore (derecha) de radio 2. . . . . . . 16
3-3. Ejemplo de configuraciones que desaparecen . . . . . . . . . . . . . . . . . . 18
3-4. Ejemplo de configuraciones estaticas . . . . . . . . . . . . . . . . . . . . . . 18
3-5. Ejemplo de configuraciones periodicas . . . . . . . . . . . . . . . . . . . . . . 19
3-6. Ejemplo de Configuracion Periodica con Desplazamiento . . . . . . . . . . . 20
3-7. Izquierda Configuracion Inicial HighLife, Derecha Evolucion Numero 100 de
la configuracion dada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4-1. Regla 14764 del Automata Celular con 3 estados y vecindades de radio 2. . . 24
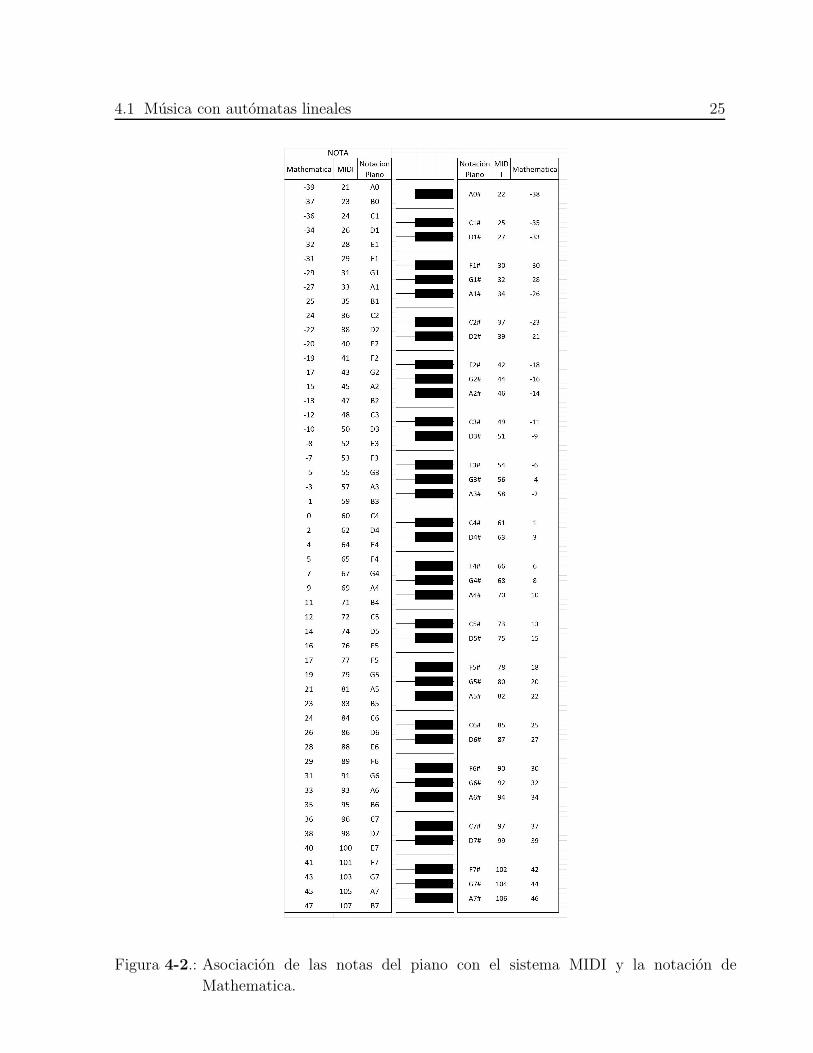
4-2. Asociacion de las notas del piano con el sistema MIDI y la notacion de Mat-
hematica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
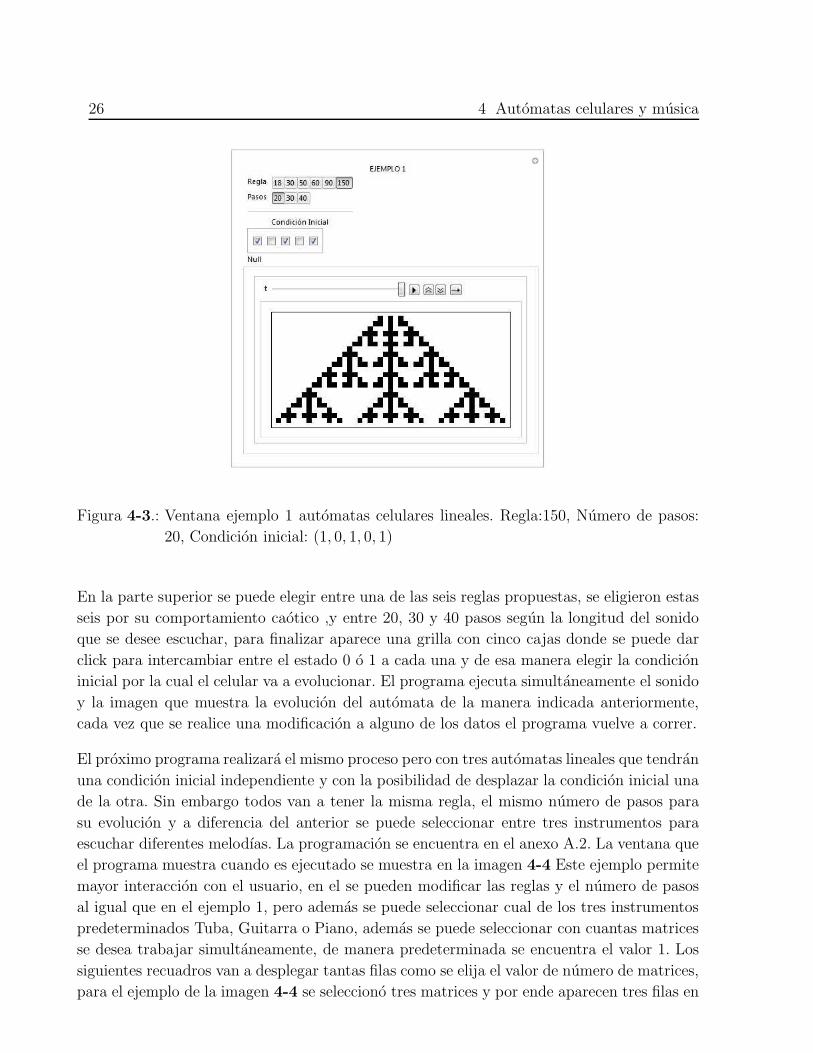
4-3. Ventana ejemplo 1 automatas celulares lineales. Regla:150, Numero de pasos:
20, Condicion inicial: (1, 0, 1, 0, 1) . . . . . . . . . . . . . . . . . . . . . . . . 26
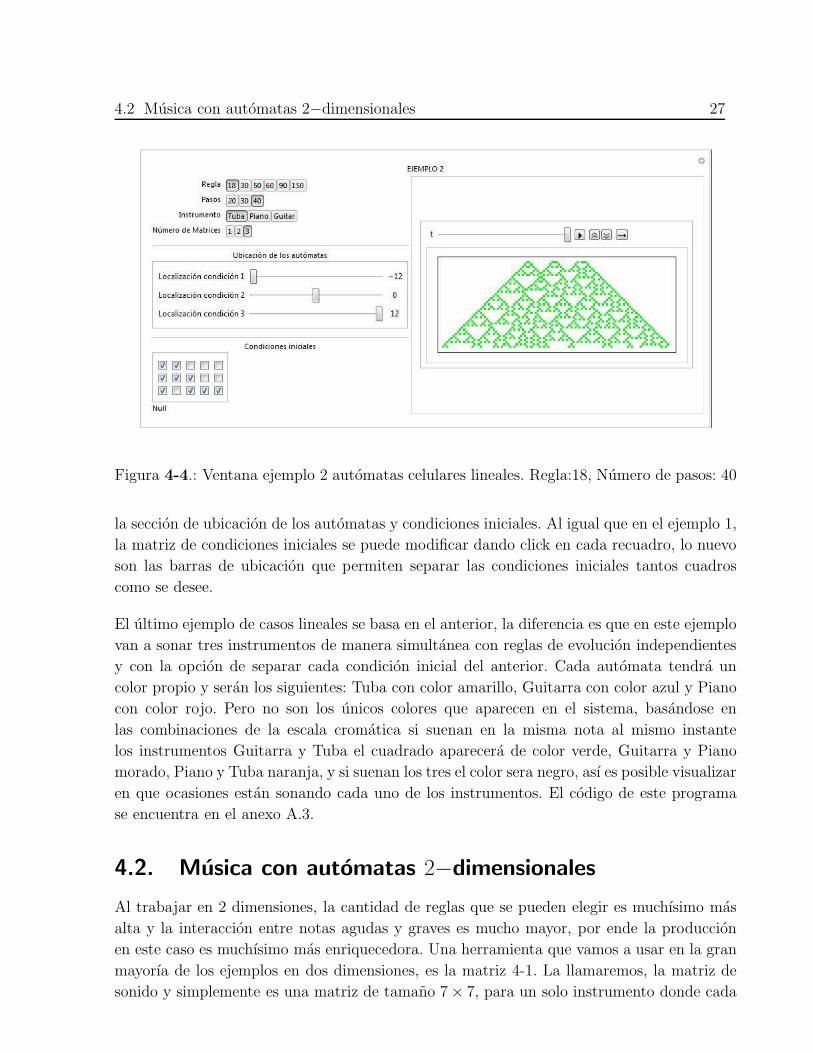
4-4. Ventana ejemplo 2 automatas celulares lineales. Regla:18, Numero de pasos: 40 27
4-5. Ventana ejemplo 3 automatas celulares lineales. Tres reglas de evolucion dis-
tintas, con 30 evoluciones y condiciones iniciales diferentes . . . . . . . . . . 28
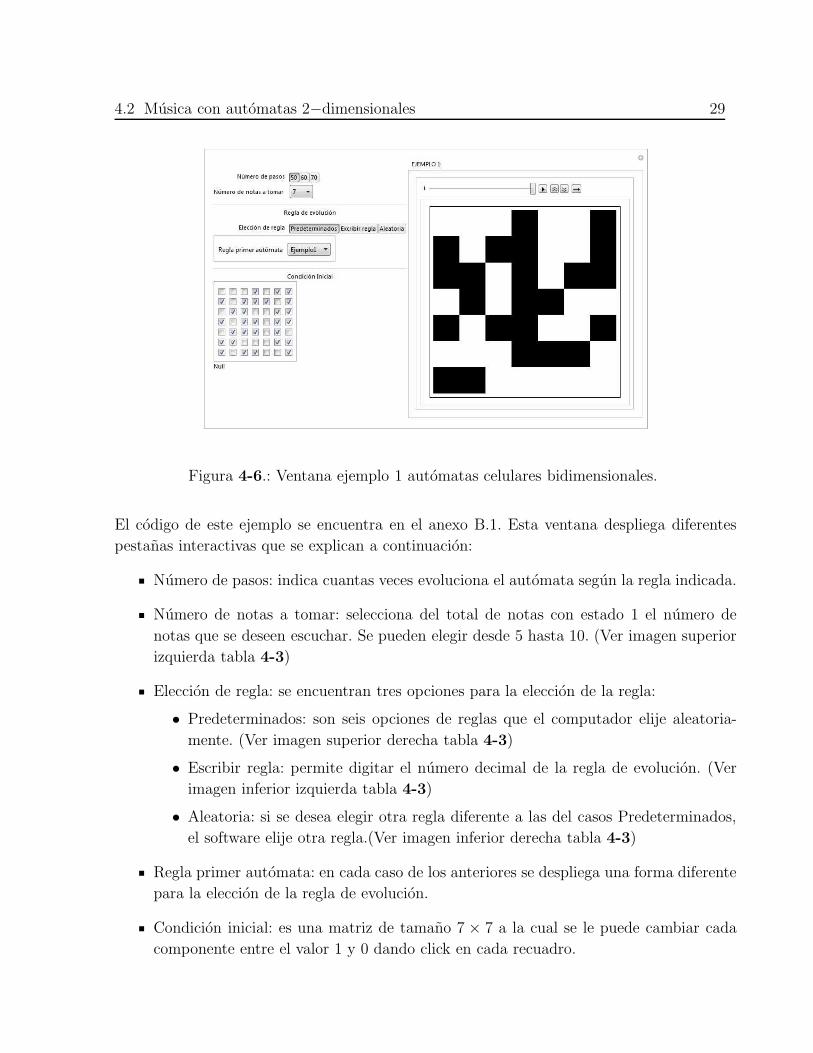
4-6. Ventana ejemplo 1 automatas celulares bidimensionales. . . . . . . . . . . . 29
4-7. Biyeccion entre la vecindad de Von Neumann y un automata celular lineal . 31
4-8. Ejemplo 1 de automatas bidimensionales con vecindades de Von Neumann . 31
4-9. Ejemplo 2 de automatas bidimensionales con vecindades de Moore . . . . . 32
4-10.Ejemplo 2 de automatas bidimensionales con vecindades de Von Neumann . 33

Indice de figuras XI
4-11.Ventana ejemplo 1 de Reglas Semitotalısticas . . . . . . . . . . . . . . . . . 35
4-12.Ventanas regla de evolucion personalizada . . . . . . . . . . . . . . . . . . . 36
4-13.Ventana ejemplo 2 de Reglas Semitotalısticas . . . . . . . . . . . . . . . . . . 37
4-14.Ventana ejemplo 2 de Reglas Semitotalısticas . . . . . . . . . . . . . . . . . . 37
4-15.Ventana ejemplo palabras de Fibonacci . . . . . . . . . . . . . . . . . . . . . 38
Indice de cuadros
2-1. Regla de evolucion de un ACL (2, 1). . . . . . . . . . . . . . . . . . . . . . . 7
2-2. Regla de evolucion 105 de un ACL(2, 1). . . . . . . . . . . . . . . . . . . . . 8
2-3. Regla de evolucion 7A0DB878 de un ACL (4,h). . . . . . . . . . . . . . . . . 8
4-1. Instrucciones comandos Mathematica . . . . . . . . . . . . . . . . . . . . . . 22
4-2. Convencion colores del automata . . . . . . . . . . . . . . . . . . . . . . . . 23
4-3. Ventanas interactivas para el ejemplo 1 de automatas celulares bidimensionales. 30
4-4. Lista de asignaciones para el caso de 4 estados. . . . . . . . . . . . . . . . . 32
4-5. Cuadro comparativo de evoluciones entre Game of Life y Highlife . . . . . . 34
4-6. Ubicacion de instrumentos por bloques en matriz 21× 21 . . . . . . . . . . . 35
4-7. Evolucion de las notas segun el movimiento que realizan . . . . . . . . . . . 37
1. Introduccion
Los automatas celulares hicieron su aparicion en los anos 50 a manos del matematico
hungaro-estadounidense John Von Neumann quien propuso un modelo bidimensional de
celulas las cuales se encuentran puestas sobre una malla de dimension finita y que segun
un estado inicial y las celulas que forman parte de su vecindad, van cambiando de estados
mientras pasa el tiempo. La idea original por la cual fue construida esta idea tenıa como
objetivo la invencion de una maquina con la propiedad que fuera capaz de auto reprodu-
cirse, debido a que Von Neumann no contaba con los recursos economicos para empezar su
proyecto decidio seguir el consejo de Stainslow M. Ulam, amigo suyo, el cual le propuso esta
idea abstracta relacionando con la maquina de Turin. Este modelo matematico ha permitido
simular distintos comportamientos fısicos, economicos, biologicos y sociales con gran preci-
sion, algo que hasta el momento no se habıa logrado con buenos resultados, y se debe a que
aun cuando el planteamiento de un automata celular es sencillo, al analizar su evolucion en
el tiempo se pueden observar comportamientos estables, periodicos, caoticos y/o aleatorios.
La computacion es en la actualidad una de las herramientas mas poderosas que tiene el
hombre para el analisis de datos, y simulacion de fenomenos a partir de condiciones iniciales.
Con estas herramientas computacionales se ha podido avanzar en diferentes modelos para la
produccion de sonidos digitales, una de las formas como que ha producido buenos resultados
de manera sencilla ha sido el uso de automatas celulares, diferentes modelos en casos unidi-
mensionales y bidimensionales pueden ser planteadas con el fin de generar musica indicando
unicamente condiciones iniciales. Cada modelo requiere ciertas capacidades computaciona-
les, el software de Mathematica que es la herramienta usada en el presente trabajo tanto
para la generacion de sonidos como de las graficas de evolucion de automatas requieren una
gran capacidad computacional, por lo cual los comandos usados en otros dispositivos pueden
no tener resultados optimos.
2. Automatas Celulares
En este capıtulo definiremos el concepto de los automatas celulares, las formas de representa-
cion mas comunes de las reglas de evolucion asociadas a cada uno; empezaremos abordando
el caso lineal, y despues veremos su extension a varias dimensiones.
2.1. Historia de los Automatas Celulares
La primera persona en trabajar el concepto de automatas celulares, fue el matematico John
Von Neumann quien se encontraba interesado en la creacion de una maquina que fuera capaz
de manufacturarse a si misma, porque en esa epoca la manufacturacion de automoviles y
objetos electricos empezaba a automatizarse. [14]
Lo complicado de empezar este proyecto fue los bajos recursos que poseıa Von Neumann, y
fue gracias a su amigo Stainslaw M. Ulam quien le sugirio empezar con un modelo de un
sistema dinamico completamente teorico, el cual consiste basicamente de un malla, la cual
posee varios cuadros en su interior los cuales pueden tener un estado de una cantidad finita de
ellos y pueden ir cambiando segun una regla establecida la cual depende del tipo de vecindad
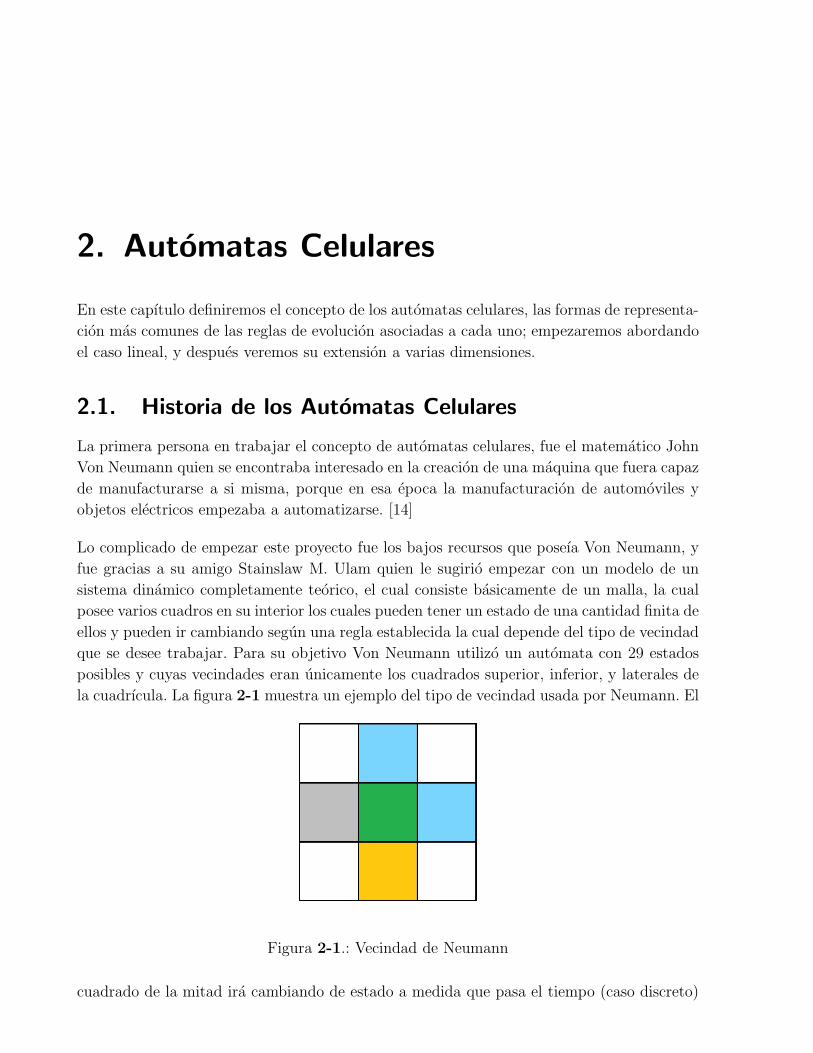
que se desee trabajar. Para su objetivo Von Neumann utilizo un automata con 29 estados
posibles y cuyas vecindades eran unicamente los cuadrados superior, inferior, y laterales de
la cuadrıcula. La figura 2-1 muestra un ejemplo del tipo de vecindad usada por Neumann. El
Figura 2-1.: Vecindad de Neumann
cuadrado de la mitad ira cambiando de estado a medida que pasa el tiempo (caso discreto)
2.1 Historia de los Automatas Celulares 3
segun el color que posean las celulas alrededor suyo. De esta manera logro crear un automata
que pudiera auto reproducirse. Von Neumann muere en el ano 1957, y solo hasta el ano de
1966, el matematico Arthur W. Burks publica los trabajos de John Von Neumann sobre
estos sistemas dinamicos.[2]
Despues de los trabajos de Von Neumann, otras personas siguieron investigando en este
campo buscando automatas mas sencillos que hicieran lo deseado por Von Neumann, uno de
los pocos que lo lograron fue el cientıfico ingles Edgar Frank Codd quien probo la existencia de
automatas celulares con la propiedad de construccion universal (idea de Neumann) con ocho
estados y tomando el mismo tipo de vecindades que Neumann [6], tiempo despues el cientıfico
Christopher Langton simplifico las reglas para la creacion de este tipo de automatas, esto fue
posible dando una propiedad universal computacional [11], la cual consiste basicamente en
tener una secuencia de instrucciones distribuidas espacialmente (parecido a las estructuras
del ADN) la cual es ejecutada para crear una nueva estructura y generar a partir de esta
una copia exacta de la condicion inicial.
Otro de los trabajos destacables en la teorıa de los automatas celulares fue el realizado por el
matematico John Horton Conway quien publico en 1970 un juego matematico llamado Life
[7] cuya idea era trabajar en dos dimensiones (tal y como lo hizo Neumann) pero tomando
los 8 cuadrados que lo rodean y solo dos estados posibles: vivo o muerto, e intenta simular
el nacimiento y muerte de organismos segun la cantidad de ellos que se encuentren a su
alrededor siguiendo estas reglas:
Sobreviviente: La celula sobrevive si existen dos o tres celulas vivas a su alrededor.
Muerte: La celula muere si a su alrededor hay cuatro o mas celulas vivas (sobrepobla-
cion), o si alrededor de la celula hay a lo mas una celula viva (desolacion).
Nacimiento: Cada espacio donde no haya una celula viva puede nacer una nueva celula
si hay exactamente tres celulas vivas a su alrededor.
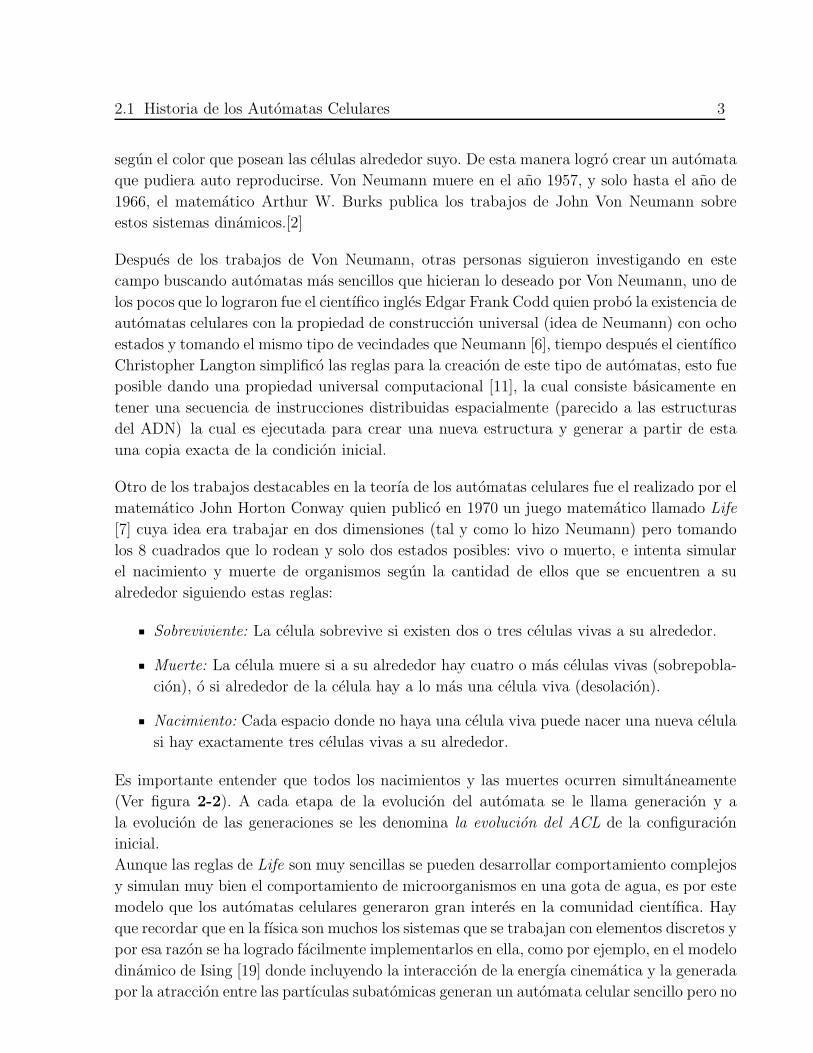
Es importante entender que todos los nacimientos y las muertes ocurren simultaneamente
(Ver figura 2-2). A cada etapa de la evolucion del automata se le llama generacion y a
la evolucion de las generaciones se les denomina la evolucion del ACL de la configuracion
inicial.
Aunque las reglas de Life son muy sencillas se pueden desarrollar comportamiento complejos
y simulan muy bien el comportamiento de microorganismos en una gota de agua, es por este
modelo que los automatas celulares generaron gran interes en la comunidad cientıfica. Hay
que recordar que en la fısica son muchos los sistemas que se trabajan con elementos discretos y
por esa razon se ha logrado facilmente implementarlos en ella, como por ejemplo, en el modelo
dinamico de Ising [19] donde incluyendo la interaccion de la energıa cinematica y la generada
por la atraccion entre las partıculas subatomicas generan un automata celular sencillo pero no
4 2 Automatas Celulares
Figura 2-2.: Ejemplo de Game of the Life propuesto por Jhon Conway
determinıstico; en la quımica se han podido modelar redes de trabajo de reacciones acopladas
con difusion espacial [8]; otro campo donde se ha logrado aplicar los automatas celulares es
en la biologıa donde el desarrollo de estructuras y reglas en el crecimiento de los organismos
son, en ocasiones, dirigidas por reglas locales muy sencillas y por esto son muy bien descritas
por modelos con automatas celulares. [18]
Gracias al desarrollo y accesibilidad que han venido ganando los equipos de computacion, el
estudio de temas como la complejidad o el caos ha tambien incrementado. Stephen Wolfram
en los anos 80’s, cuyo interes es el estudio de la complejidad, senalo que los sistemas com-
plejos tienden a regirse por reglas sencillas y componentes muy simples, y es cuando ambas
interactuan que se generan patrones complejos, es por esta razon que usa para su trabajo los
automatas. Hay que resaltar, y que es muy importante, es que tanto Von Neumann, Conway
y Codd, entre tantos otros, se concentraron en conseguir automatas que cumplieran sus re-
querimientos, mientras que el estudio de Wolfram se enfoco en analizar los comportamientos
de diferentes reglas de evolucion, casi siempre sobre automatas celulares lineales.
2.2. Estructura de los Automatas Celulares
2.2.1. Estado y vecindad
Iniciaremos tratando el caso lineal y despues miraremos como se puede extender a otras
dimensiones, tomemos una cinta de longitud finita y dividamosla en partes iguales, a cada
uno de estos rectangulos que hemos generado lo llamaremos una celula.
A cada celula le podemos asignar un elemento de un conjunto finito A cualesquiera no vacıo,
puede ser un color, un numero, una letra, etc., a cada uno de los elementos del conjunto A
lo llamaremos un estado de la celula, se debe tener en cuenta que todas las celulas deben
tener el mismo numero de posibles estados, tal vez con diferente probabilidad de eleccion.
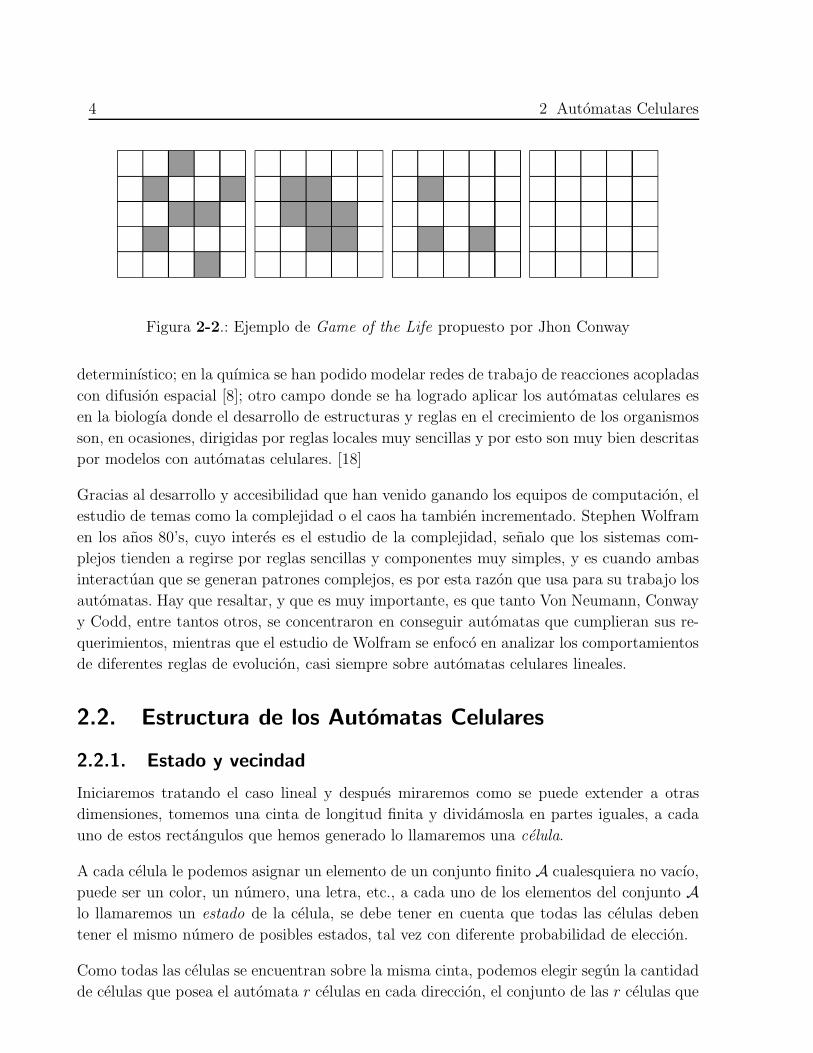
Como todas las celulas se encuentran sobre la misma cinta, podemos elegir segun la cantidad
de celulas que posea el automata r celulas en cada direccion, el conjunto de las r celulas que
2.2 Estructura de los Automatas Celulares 5
se encuentran a la izquierda de una celula fija, las r celulas que se encuentran a su derecha, y
la celula misma forman lo que llamaremos una 2r+1−vecindad. Para visualizarlo de manera
mas clara, la figura 2-3 muestra como son elegidas las vecindades.
b b bb b b
2r + 1
Célula
Figura 2-3.: Ejemplo de una vecindad de tamano 2r + 1 para un ACL
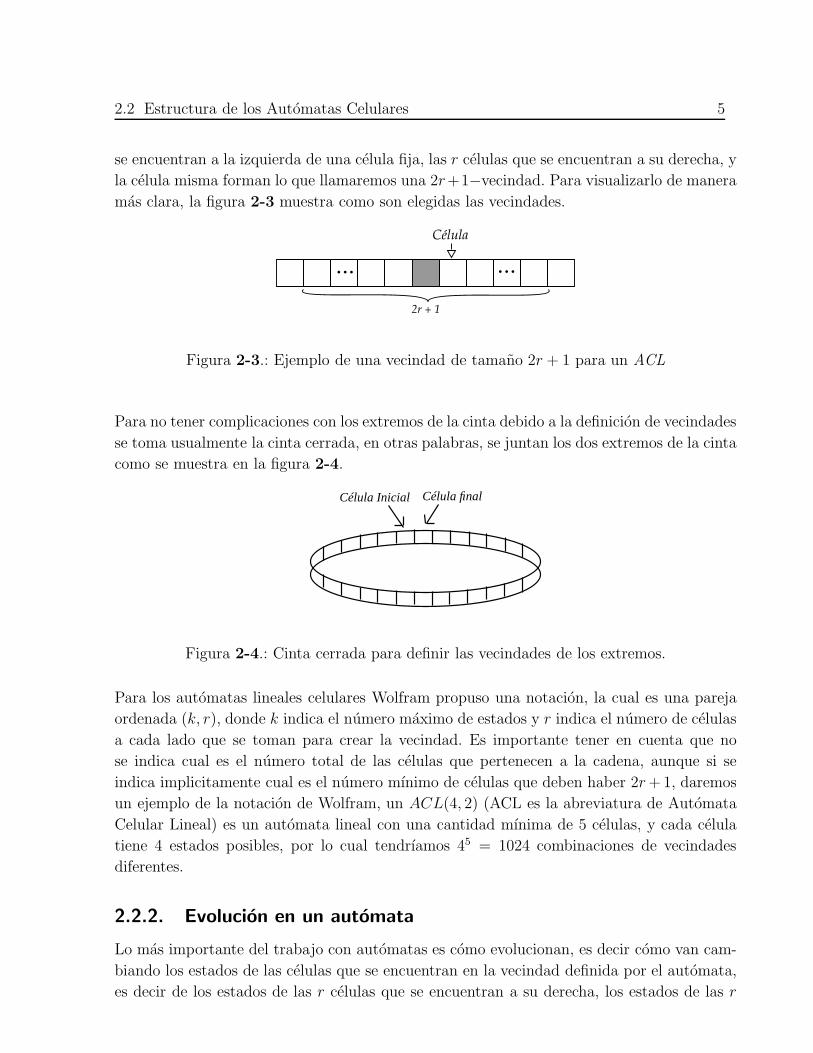
Para no tener complicaciones con los extremos de la cinta debido a la definicion de vecindades
se toma usualmente la cinta cerrada, en otras palabras, se juntan los dos extremos de la cinta
como se muestra en la figura 2-4.
Célula Inicial Célula final
Figura 2-4.: Cinta cerrada para definir las vecindades de los extremos.
Para los automatas lineales celulares Wolfram propuso una notacion, la cual es una pareja
ordenada (k, r), donde k indica el numero maximo de estados y r indica el numero de celulas
a cada lado que se toman para crear la vecindad. Es importante tener en cuenta que no
se indica cual es el numero total de las celulas que pertenecen a la cadena, aunque si se
indica implicitamente cual es el numero mınimo de celulas que deben haber 2r+1, daremos
un ejemplo de la notacion de Wolfram, un ACL(4, 2) (ACL es la abreviatura de Automata
Celular Lineal) es un automata lineal con una cantidad mınima de 5 celulas, y cada celula
tiene 4 estados posibles, por lo cual tendrıamos 45 = 1024 combinaciones de vecindades
diferentes.
2.2.2. Evolucion en un automata
Lo mas importante del trabajo con automatas es como evolucionan, es decir como van cam-
biando los estados de las celulas que se encuentran en la vecindad definida por el automata,
es decir de los estados de las r celulas que se encuentran a su derecha, los estados de las r
6 2 Automatas Celulares
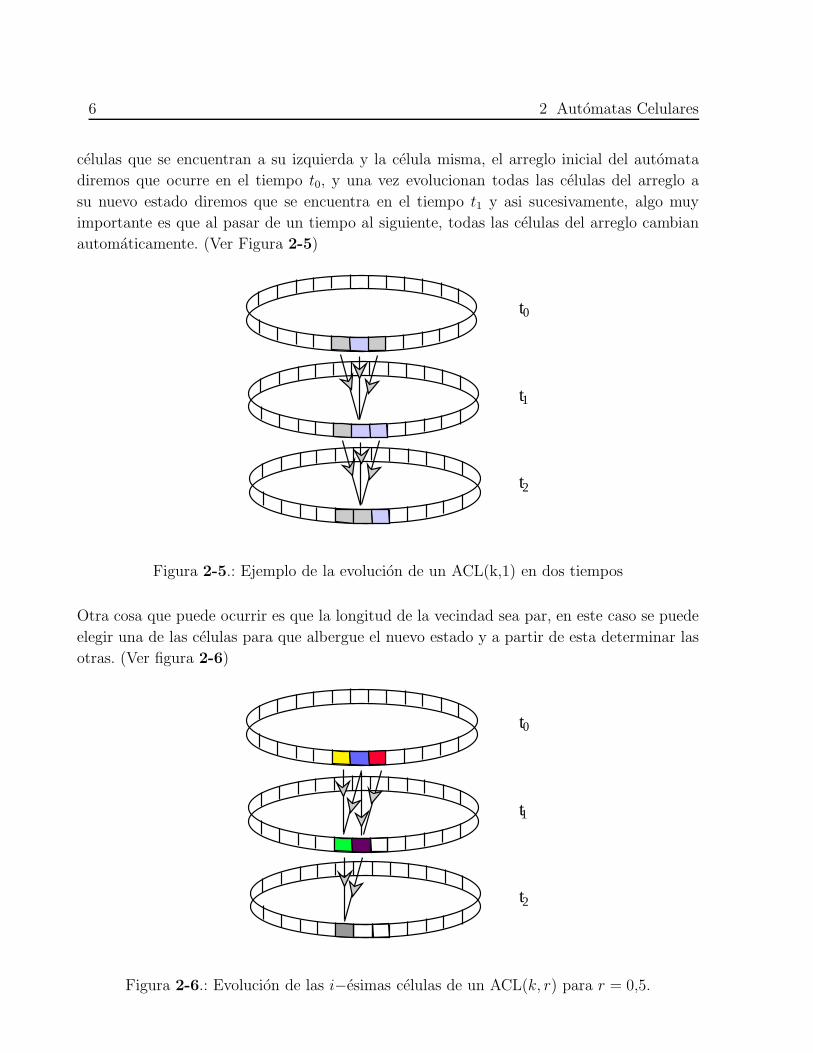
celulas que se encuentran a su izquierda y la celula misma, el arreglo inicial del automata
diremos que ocurre en el tiempo t0, y una vez evolucionan todas las celulas del arreglo a
su nuevo estado diremos que se encuentra en el tiempo t1 y asi sucesivamente, algo muy
importante es que al pasar de un tiempo al siguiente, todas las celulas del arreglo cambian
automaticamente. (Ver Figura 2-5)
t
t
t
0
1
2
Figura 2-5.: Ejemplo de la evolucion de un ACL(k,1) en dos tiempos
Otra cosa que puede ocurrir es que la longitud de la vecindad sea par, en este caso se puede
elegir una de las celulas para que albergue el nuevo estado y a partir de esta determinar las
otras. (Ver figura 2-6)
t
t
t
0
1
2
Figura 2-6.: Evolucion de las i−esimas celulas de un ACL(k, r) para r = 0,5.

2.2 Estructura de los Automatas Celulares 7
Todos las celulas en el estado que se encuentre en un tiempo dado genera un patron que
se llamara un estado global [21], al cambiar de estados todas las celulas en el arreglo en
cada tiempo de evolucion, cambia el estado global del arreglo. Se debe tener en cuenta que
cualquiera de los posibles estados globales que posee el automata puede ser el estado inicial
desde el cual empezara la evolucion del automata, a esta condicion se nombra configuracion
inicial, y al estado global en el tiempo i se le denomina la generacion i−esima, por ultimo se
llamara regla de evolucion a la funcion de transicion que se aplica a cada celula del automata
y que segun los elementos que conforman su vecindad determinan el siguiente estado de la
misma. Esta funcion se puede expresar de diferentes maneras, una de ellas es de forma
tabular. (Ver ejemplo tabla 2-1)
Vecindad Evolucion Estado
000 → 1
001 → 0
010 → 0
011 → 1
100 → 0
101 → 1
110 → 1
111 → 0
Cuadro 2-1.: Regla de evolucion de un ACL (2, 1).
Al tener cada celula k posibles estados, el numero posible de reglas de evolucion de un
ACL(k, r) es igual a kk2r+1
; adaptado a el ejemplo dado por la tabla 2-1, esa regla de
evolucion es una de las 222r+1
= 256 reglas de evolucion posibles que posee un ACL(2, 1).
Para distinguir los ACL, Wolfram propuso utilizar sus reglas de evolucion asociadas, sin
embargo como el numero de estados posibles aumenta segun el numero de estados y/o
vecinos, se utiliza el equivalente en sistema decimal o en otras bases segun convenga, a esta
representacion se le conoce como el numero de Wolfram. Para la regla de evolucion descrita
en la Tabla 2-1, como el numero de estados posibles es dos usaremos primero la notacion
binaria y luego realizaremos la conversion a sistema decimal. (Ver tabla 2-2)
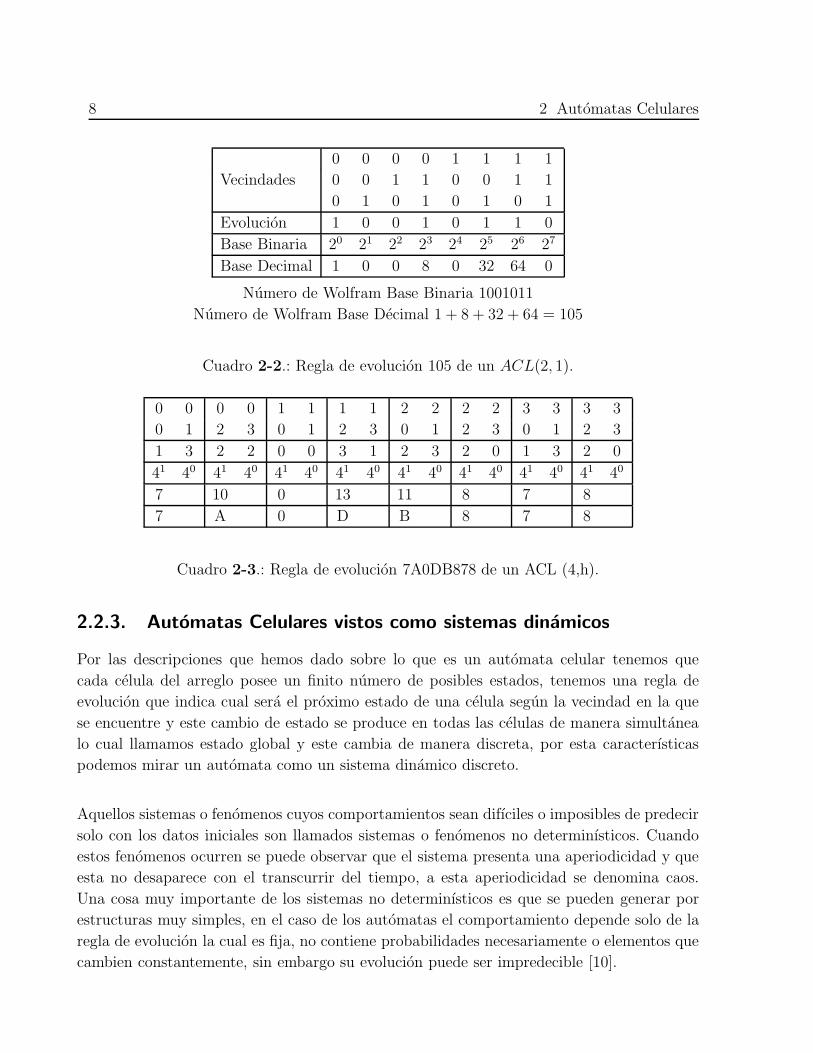
En otras ocasiones el numero de Wolfram en base decimal no es practico por la cantidad de
dıgitos que dicho numero pueda tener, es ahı cuando se vuelve imperativo usar otras bases
numericas para su escritura. Para el ejemplo de un ACL(4, h) con h = 0,5 descrito por la
tabla 2-3 sera mas conveniente el uso de la notacion hexadecimal.
8 2 Automatas Celulares
0 0 0 0 1 1 1 1
Vecindades 0 0 1 1 0 0 1 1
0 1 0 1 0 1 0 1
Evolucion 1 0 0 1 0 1 1 0
Base Binaria 20 21 22 23 24 25 26 27
Base Decimal 1 0 0 8 0 32 64 0
Numero de Wolfram Base Binaria 1001011
Numero de Wolfram Base Decimal 1 + 8 + 32 + 64 = 105
Cuadro 2-2.: Regla de evolucion 105 de un ACL(2, 1).
0 0 0 0 1 1 1 1 2 2 2 2 3 3 3 3
0 1 2 3 0 1 2 3 0 1 2 3 0 1 2 3
1 3 2 2 0 0 3 1 2 3 2 0 1 3 2 0
41 40 41 40 41 40 41 40 41 40 41 40 41 40 41 40
7 10 0 13 11 8 7 8
7 A 0 D B 8 7 8
Cuadro 2-3.: Regla de evolucion 7A0DB878 de un ACL (4,h).
2.2.3. Automatas Celulares vistos como sistemas dinamicos
Por las descripciones que hemos dado sobre lo que es un automata celular tenemos que
cada celula del arreglo posee un finito numero de posibles estados, tenemos una regla de
evolucion que indica cual sera el proximo estado de una celula segun la vecindad en la que
se encuentre y este cambio de estado se produce en todas las celulas de manera simultanea
lo cual llamamos estado global y este cambia de manera discreta, por esta caracterısticas
podemos mirar un automata como un sistema dinamico discreto.
Aquellos sistemas o fenomenos cuyos comportamientos sean difıciles o imposibles de predecir
solo con los datos iniciales son llamados sistemas o fenomenos no determinısticos. Cuando
estos fenomenos ocurren se puede observar que el sistema presenta una aperiodicidad y que
esta no desaparece con el transcurrir del tiempo, a esta aperiodicidad se denomina caos.
Una cosa muy importante de los sistemas no determinısticos es que se pueden generar por
estructuras muy simples, en el caso de los automatas el comportamiento depende solo de la
regla de evolucion la cual es fija, no contiene probabilidades necesariamente o elementos que
cambien constantemente, sin embargo su evolucion puede ser impredecible [10].
2.2 Estructura de los Automatas Celulares 9
2.2.4. Clasificacion de Wolfram
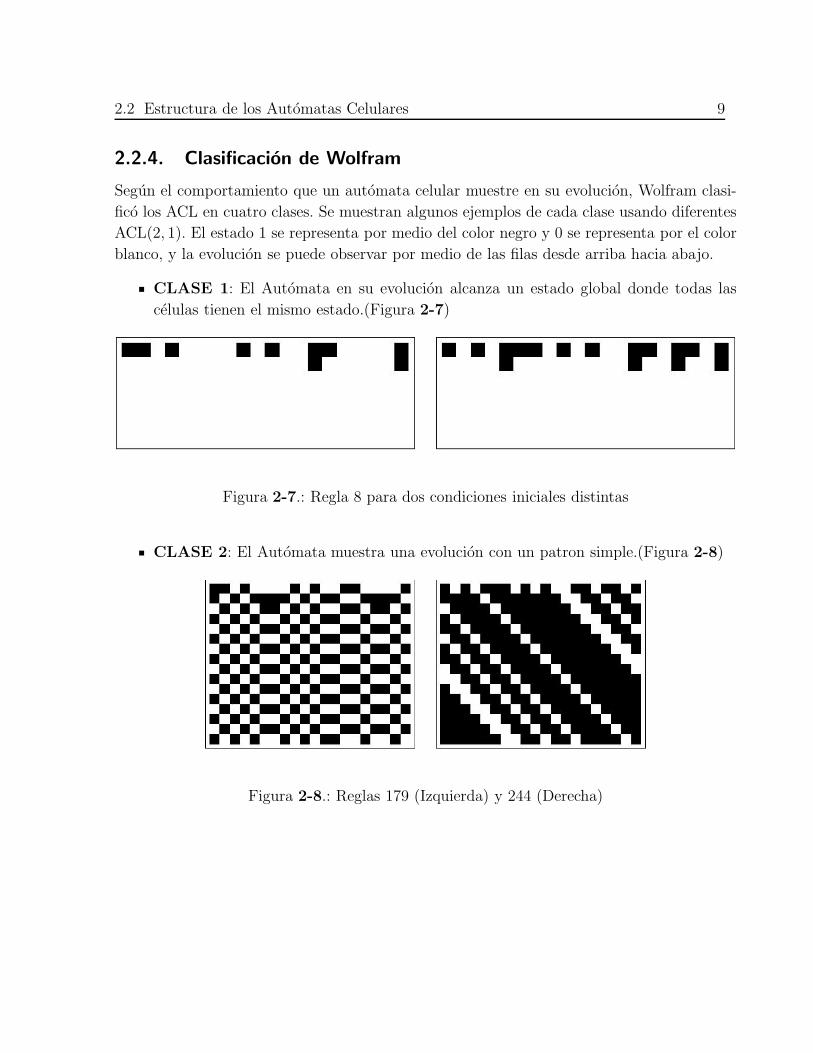
Segun el comportamiento que un automata celular muestre en su evolucion, Wolfram clasi-
fico los ACL en cuatro clases. Se muestran algunos ejemplos de cada clase usando diferentes
ACL(2, 1). El estado 1 se representa por medio del color negro y 0 se representa por el color
blanco, y la evolucion se puede observar por medio de las filas desde arriba hacia abajo.
CLASE 1: El Automata en su evolucion alcanza un estado global donde todas las
celulas tienen el mismo estado.(Figura 2-7)
Figura 2-7.: Regla 8 para dos condiciones iniciales distintas
CLASE 2: El Automata muestra una evolucion con un patron simple.(Figura 2-8)
Figura 2-8.: Reglas 179 (Izquierda) y 244 (Derecha)

10 2 Automatas Celulares
CLASE 3: El Automata muestra una evolucion aperiodica y caotica.(Figura 2-9)
Figura 2-9.: Reglas 75 (Izquierda) y 105 (Derecha)
CLASE 4: El Automata muestra una evolucion compleja, es decir, aperiodica pero de
una u otra manera ordenada.(Figura 2-10)
Figura 2-10.: Reglas 57 (Izquierda) y 109 (Derecha)
3. Generalizacion de Automatas
Celulares
Los automatas celulares lineales son un caso especial de las funciones conocidas con el mismo
nombre, pero sobre grupos finitamente generados. Aquı, se generalizan los conceptos de
vecindad, estado global y generaciones.
3.1. Definiciones basicas
Sean M un grupo finitamente generado y A un conjunto finito de sımbolos (llamado un
alfabeto), notaremos por AM el conjunto de todas las funciones f : M → A, es decir M
indexa los elementos de A. Escribiremos x= [xm]m∈M, donde cada xm ∈ A para todo m ∈ M.
En la mayoria de los casos M = N := {0, 1, 2, · · · }, M = Z := {· · · ,−2,−1, 0, 1, 2, · · · },
M = Nn,M = Zm, o M = Nn × Zm con n,m ∈ N.
Visto A como un espacio topologico discreto, A es un espacio compacto por ser finito, luego
AM es compacto con la topologıa producto de Tychonoff, aun mas A
M es un espacio de
Cantor. Sea n ∈ M, definimos la funcion fn : AM → AM como el mapeo de cambio definido
por [fn(x)]m = xm+n para todo x ∈ AM y m ∈ M. El conjunto {fn}n∈M es una M-accion
continua sobre AM, la cual denotaremos por f .
Sea H un subconjunto finito de M , y sea φ : AH → A una funcion. El automata celular (CA)
determinado por la funcion φ es una funcion Φ : AM → AM definida por Φ(x)m := φ(xm+H)
donde xm+H := [xm+h]h∈H para todo x ∈ AM ym ∈ M. Se puede demostrar que los automatas
celulares son exactamente todas las transformaciones de AM las cuales conmutan con todos
los mapeos de cambio. [9]
Al conjunto H lo llamaremos la vecindad de Φ. Por ejemplo, si M = Z, entonces usualmente
se elige H = [−l, r] para algunos l, r ∈ N. Al numero l lo llamaremos radio izquierdo y al
numero r lo llamaremos radio derecho. En los casos mas generales en los que M = Zn, es
usual que H ⊂ [−l, r]n. Algunas clases de automatas celulares importantes son:
Automata celular lineal: Sea (A,+) un grupo abeliano finito, se dice que Φ un
automata celular es lineal si la regla local φ tiene la forma

12 3 Generalizacion de Automatas Celulares
φ(xH) :=∑
h∈H
gh(xh) (3-1)
para todo xH ∈ AH, donde gh : A → A es un endomorfismo para cada h ∈ H.
Automata celular afın: Sea (A,+) un grupo abeliano finito, se dice que Φ es un
automata celular afın si la regla local φ tiene la forma
φ(xH) := c+∑
h∈H
gh(xh) (3-2)
para todo xH ∈ AH, donde gh : A → A es un endomorfismo para cada h ∈ H y c es
una constante.
Automatas celulares de permutacion: Supongamos que M = Z, si notamos por
x = [x−n+1, · · · , xm] ∈ A[−n+1,m] para n,m ∈ N , se entendera por [ax] para un
elemento a ∈ A al elemento [ax] := [a, x−n+1, · · · , xm] ∈ A[−n,m]. Si Φ : AM → A
M
tiene como regla local a φ : A[−n,m] → A y tomamos x ∈ A[−n+1,m] definimos la funcion
φx : A → A por φx (a) := φ([ax]). Diremos que Φ es permutacion a izquierda si
φx : A → A es una biyeccion para todo x ∈ A[−n+1,m].
De manera analoga definimos x = [x−n, · · · , xm−1] ∈ A[−n,m−1] , [xa] := [x−n+1, · · · , xm, a] ∈
A[−n,m], y para la regla local φ definimos xφ : A → A como xφ(a) := φ([x]a), y si esta
ultima es biyectiva para todo x ∈ A[−n,m−1] diremos que Φ es permutativo a derecha, y
en el caso que Φ sea permutativo por derecha y por izquierda solamente diremos que
es de permutacion. Este concepto se puede extender a M un grupo arbitrario.
Una herramienta que es muy util en el estudio de automatas celulares y une estos conceptos
mas con el analisis matematico es la posibilidad de crear una medida. Sea S ⊂ M, y b ∈ AS.
Denotaremos por 〈b〉 := {a ∈ AM; aS := b} el conjunto cilindro determinado por b. Sea L
la σ−algebra sobre AM generada por todos los conjuntos cilindros. Una medida µ en A
M es
una funcion contable aditiva µ : L → R tal que µ[
AM]
= 1. Un ejemplo de los tipos de
medidas que se trabajan en este ambito es la Medida de Bernoulli . Sea β0 una medida
de probabilidad en A, esta induce la medida β en AM la cual para algun S ⊂ M finito y
un a ∈ AS, si S := |S| entonces β|〈a〉| =
∏
s∈S β0(as). Cuando trabajamos solamente con
medidas de probabilidad (aunque podemos extenderlo para algun numero real) definimos el
soporte de la medida µ como el subconjunto cerrado mas pequeno X ⊂ AM tal que µ|X| = 1;
este conjunto lo denotaremos por sup(µ), en el caso que X = AM diremos que µ tiene soporte
completo. Ahora miremos algunas propiedades que pueden tener estas medidas con respecto
al automata celular:

3.1 Definiciones basicas 13
Medida invariante: Sean µ una medida en AM y Φ : AM → A
M un automata celular.
Definimos la medida Φµ como Φµ(B) = µ(Φ−1(B)), para todo B ∈ B. Diremos que µ
es Φ−invariante si Φµ = µ.
Medida uniforme: Sea A := |A|. Una medida uniforme σ en AM es una medida de
Bernoulli tal que, para cualquier subconjunto finito S ⊂ M, y cualquier x ∈ AS, si
S = |S|, entonces σ|〈x〉| = 1/AU .
Ahora, sea Φ : AM → AM y x ∈ A
M diremos que y ∈ AM es el ancestro de x si se cumple
Φ(y) = x, al conjunto {x ∈ AM/x no tiene ancestros} se llama el Jardın del Eden. Es claro
que si Φ es un epimorfismo sobreyectivo el Jardın del Eden es vacıo , sin embargo cuando
el epimorfismo es inyectivo no es facil determinar su Jardın del Eden, es aquı donde cobra
importancia las medidas anteriormente definidas, el ejemplo de ello mas importante es el que
se conoce con el nombre del Teorema del Jardın del Eden [13].Cuando un automata Φ
cumple que su Jardın del Eden es vacıo, diremos que Φ es un automata celular reversible.
Para el caso de los automatas celulares que se definıan en el capıtulo 2, tenemos un numero
finito de estados k el cual podemos asociar con en conjunto finito Zp y vecindades H =
{−r, · · · , r} es decir A = Zp y H ⊂ M = Z. Ademas si gh : Zp → Zp es un endomorfismo
tenemos gh(n) = ch · n por lo cual las reglas locales son de la forma:
φ(xH) =∑
h∈H
ch · xh (3-3)
Por definicion el numero de elementos de AH es |A||H| y en nuestro ejemplo k2r+1. Debido a
que los elementos de Zn son {0, 1, · · · , n− 1}. Podemos organizar los elementos de AH usando
el orden lexicografico, luego si ρ : AH → N envıa un elemento B ∈ AH a su correspondiente
numero natural segun el orden lexicograficos, se puede definir:
W(φ) :=∑
B∈AH
φ(B) · ρ(B) (3-4)
Esta funcion le asigna a cada regla local un numero, este valor lo conoceremos como el
numero de Wolfram del automata celular Φ, este va a ser un numero entero en el rango
[0, kk2r+1
− 1].Si k = 2 y r = 1 se tendrıa que el numero de reglas locales diferentes serıa
256, pero en el caso de dos dimensiones tomando vecindades de 9 celulas tendrıamos 2256
reglas diferentes por lo cual se vuelve muy complicado representar las reglas mediante una
asignacion numerica dada explıcitamente por la evolucion de cada uno de los estados segun
sus vecindades, es por eso que se introducira otra manera de expresar las reglas de evolucion
en dos o mas dimensiones.

14 3 Generalizacion de Automatas Celulares
3.2. Automatas celulares sobre Z
Teniendo los conceptos generales sobre automatas celulares se enfocara el trabajo al caso que
M sea el conjunto de los numeros enteros. Sea d un entero positivo, llamaremos al conjunto
Zd el espacio celular d−dimensional. A los elementos de Zd los llamaremos las celulas y a los
elementos de A los conoceremos como los estados.
Las vecindades de una celula en el caso de Zd, son de la forma H =∏d
i=1[−li, ri] ⊂ Zd.
Entonces para x ∈ Zd denotamos por:
xH :=
d∏
i=1
[−li + xi, ri + xi] (3-5)
Esta vecindad tendra un total de |H| =∏d
i=1(li + ri + 1) celulas que la conforman, ası que
al tener cada celula posibles A = |A| estados, existen A|H| posibles configuraciones, y como
a cada una de ellas, de acuerdo a la regla local φ puede ser asignada a A diferentes estados,
entonces el numero total de reglas locales diferentes es:
AA|H|
(3-6)
De todos los tipos de vecindades que se tienen en dos o mas dimensiones existen dos tipos
muy conocidos en la literatura relacionada con los automatas celulares debido a las personas
que trabajaron con ellas y se conocen como vecindad de Moore y vecindad de Neumann.
VECINDAD DE MOORE, dado un numero r entero positivo diremos que H es
una vecindad de Moore de radio r si H = [−r, r]d, y se denota por V dr .
VECINDAD DE NEUMANN, dado un numero r entero positivo diremos que H
es una vecindad de Neumman de radio r si para cada x ∈ H se tiene
d∑
i=1
|xi| 6 r (3-7)
en este caso de denota por Mdr .
Veamos la importancia que juega la topologıa en la teorıa de los automatas celulares. Sean
f1, f2, · · · de configuraciones donde fi ∈ AZd
para cada i, diremos que f ∈ AZd
es el lımite
de la sucesion si para todo x ∈ Zd tenemos que fi(x) = f(x) para todo i > k. Claramente si
el lımite existe es unico, a este lo denotaremos por:
f = lımx→∞
fi (3-8)
Veamos una primera proposicion relacionada con los lımites de las configuraciones.

3.2 Automatas celulares sobre Z 15
Proposicion 3.1. Toda sucesion de configuraciones tiene una subsucesion convergente
Demostracion. Sean f1, f2, · · · una sucesion arbitraria con fi ∈ AZd
, y x1,x2, · · · una lista de
elementos de elementos de Zd. Vamos a generar la lista de subındices i0 < i1 < i2 < · · · que
nos van a indicar la subsucesion convergente y lo haremos de manera recursiva: sea i0 ∈ Z+,
supongamos que ik−1 ha sido elegido y vamos a elegir ik para k > 1. ik sera el menor entero
que satisface las siguientes condiciones:
(1k) ik > ik−1
(2k) fik(xj) = fik−1(xj) para todo j = 1, 2, · · · , k − 1.
(3k) Existen infinitos indices i tales que fi(xj) = fik(xj) para todo j = 1, 2, · · · , k.
Veamos por que razon los numeros ik siempre existen. Al haberse elegido ik−1 estamos
asegurando que se cumple la propiedad (3k−1) para el ındice i−1, por lo cual podemos elegir
uno de estos i tal que i > ik−1, y por la misma propiedad (3k−1), se cumple la propiedad
(2k). Con lo cual se garantiza la existencia de estos ik.
Veamos una proposicion que nos muestra la continuidad que posee el automata celular.
Proposicion 3.2. Sea Φ un automata celular y sean f1, f2, · · · una sucesion convergente de
configuraciones. Entonces tenemos que Φ(f1),Φ(f2), · · · converge y
lımt→∞
Φ(ft) = Φ(f) (3-9)
donde
(3-10)
lımt→∞
ft = f (3-11)
Demostracion. Sea Φ un automata celular y sea x ∈ Zd. Por definicion de lımite, dado
K ∈ Z+, si i > K entonces
fi(x) = f(x) (3-12)
Luego:
Φ(fi)(x) = φ(fi(x)) (3-13)
= φ(f(x)) (3-14)
= Φ(f)(x) (3-15)
Como se eligio x arbitrariamente, tenemos que Φ(f1),Φ(f2), · · · es una sucesion que converge
a Φ(f).
16 3 Generalizacion de Automatas Celulares
3.3. Automatas celulares bidimensionales
Para esta parte analizaremos solamente el caso bidimensional de los automatas sobre Z2.
Sea Θn = {0, 1, · · · , n− 1} el conjunto de los posibles estados del automata , es importante
notar que en los casos de automatas lineales podemos tomar un arreglo de longitud finita
y podıamos conectar el inicio del arreglo con el final y generar un arreglo circular, pero en
mas dimensiones la configuracion inicial C se toma sobre todo el ”plano cartesiano” de Z2 ,
para estos casos H = [−a1, b1]× [−a2, b2] , y llamaremos regla local ψ : (Θn)H → Θn.
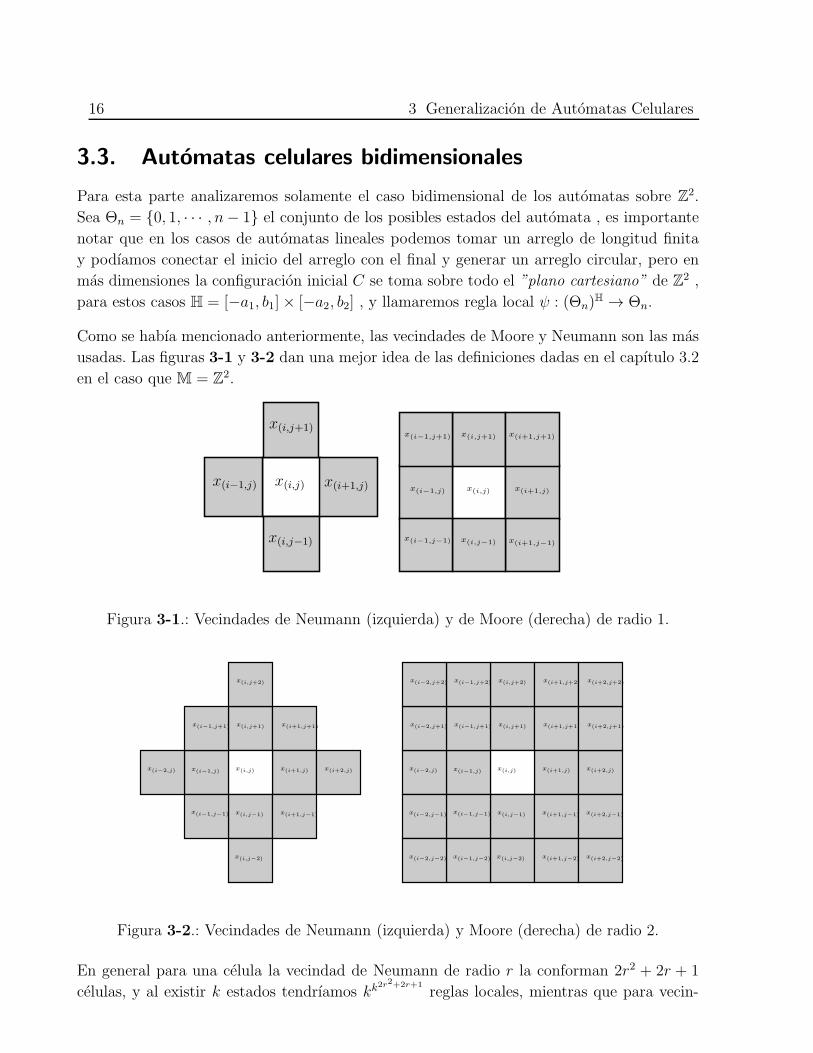
Como se habıa mencionado anteriormente, las vecindades de Moore y Neumann son las mas
usadas. Las figuras 3-1 y 3-2 dan una mejor idea de las definiciones dadas en el capıtulo 3.2
en el caso que M = Z2.
x(i,j) x(i+1,j)
x(i,j+1)
x(i−1,j)
x(i,j−1)
x(i+1,j+1)
x(i,j)
x(i,j+1)
x(i+1,j)
x(i+1,j−1)x(i,j−1)x(i−1,j−1)
x(i−1,j)
x(i−1,j+1)
Figura 3-1.: Vecindades de Neumann (izquierda) y de Moore (derecha) de radio 1.
x(i+1,j)
x(i,j+1)
x(i,j+2)
x(i+1,j+1)
x(i+1,j) x(i+2,j)x(i,j)
x(i,j−1) x(i+1,j−1)
x(i,j−2)
x(i−1,j)
x(i−1,j+1)
x(i−1,j−1)
x(i−2,j) x(i+1,j)
x(i,j+1)
x(i,j+2)
x(i+1,j+1)
x(i+1,j) x(i+2,j)x(i,j)
x(i,j−1) x(i+1,j−1)
x(i,j−2)
x(i−1,j)
x(i−1,j+1)
x(i−1,j−1) x(i+2,j−1)
x(i+2,j+1)
x(i+1,j+2) x(i+2,j+2)
x(i+1,j−2) x(i+2,j−2)x(i−1,j−2)
x(i−1,j+2)
x(i−2,j)
x(i−2,j−1)
x(i−2,j+1)
x(i−2,j+2)
x(i−2,j−2)
Figura 3-2.: Vecindades de Neumann (izquierda) y Moore (derecha) de radio 2.
En general para una celula la vecindad de Neumann de radio r la conforman 2r2 + 2r + 1
celulas, y al existir k estados tendrıamos kk2r2+2r+1
reglas locales, mientras que para vecin-
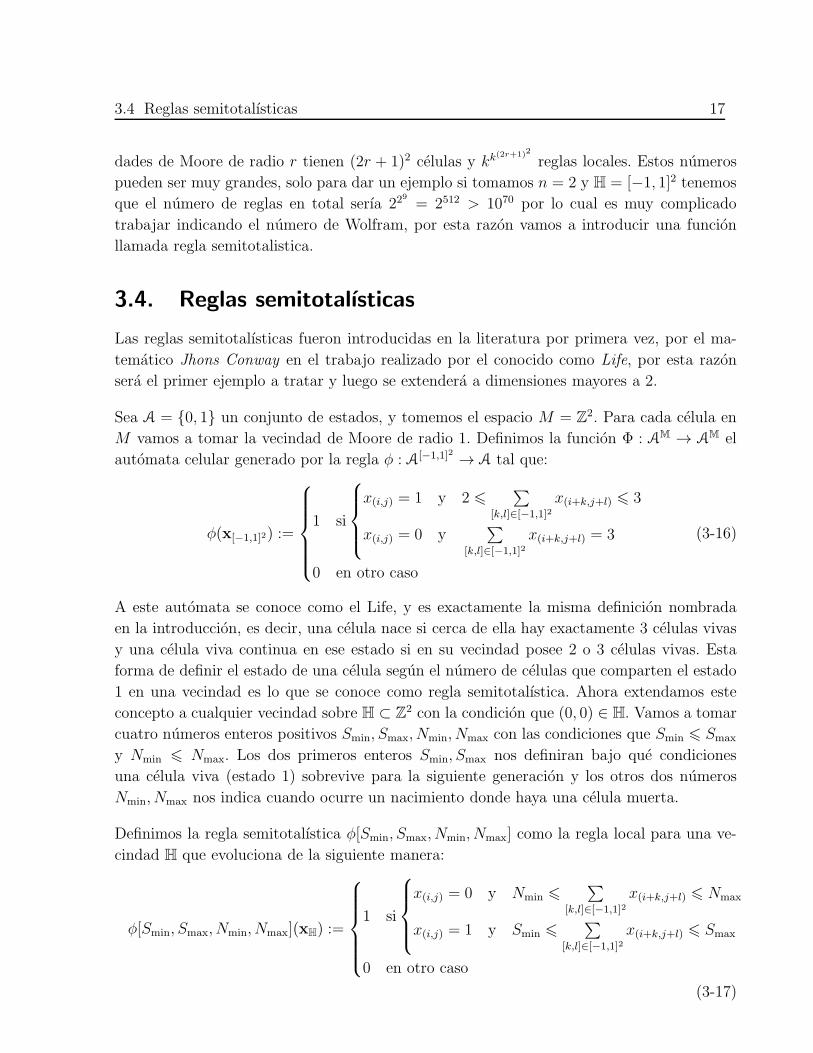
3.4 Reglas semitotalısticas 17
dades de Moore de radio r tienen (2r + 1)2 celulas y kk(2r+1)2
reglas locales. Estos numeros
pueden ser muy grandes, solo para dar un ejemplo si tomamos n = 2 y H = [−1, 1]2 tenemos
que el numero de reglas en total serıa 229= 2512 > 1070 por lo cual es muy complicado
trabajar indicando el numero de Wolfram, por esta razon vamos a introducir una funcion
llamada regla semitotalistica.
3.4. Reglas semitotalısticas
Las reglas semitotalısticas fueron introducidas en la literatura por primera vez, por el ma-
tematico Jhons Conway en el trabajo realizado por el conocido como Life, por esta razon
sera el primer ejemplo a tratar y luego se extendera a dimensiones mayores a 2.
Sea A = {0, 1} un conjunto de estados, y tomemos el espacio M = Z2. Para cada celula en
M vamos a tomar la vecindad de Moore de radio 1. Definimos la funcion Φ : AM → AM el
automata celular generado por la regla φ : A[−1,1]2 → A tal que:
φ(x[−1,1]2) :=
1 si
x(i,j) = 1 y 2 6∑
[k,l]∈[−1,1]2x(i+k,j+l) 6 3
x(i,j) = 0 y∑
[k,l]∈[−1,1]2x(i+k,j+l) = 3
0 en otro caso
(3-16)
A este automata se conoce como el Life, y es exactamente la misma definicion nombrada
en la introduccion, es decir, una celula nace si cerca de ella hay exactamente 3 celulas vivas
y una celula viva continua en ese estado si en su vecindad posee 2 o 3 celulas vivas. Esta
forma de definir el estado de una celula segun el numero de celulas que comparten el estado
1 en una vecindad es lo que se conoce como regla semitotalıstica. Ahora extendamos este
concepto a cualquier vecindad sobre H ⊂ Z2 con la condicion que (0, 0) ∈ H. Vamos a tomar
cuatro numeros enteros positivos Smin, Smax, Nmin, Nmax con las condiciones que Smin 6 Smax
y Nmin 6 Nmax. Los dos primeros enteros Smin, Smax nos definiran bajo que condiciones
una celula viva (estado 1) sobrevive para la siguiente generacion y los otros dos numeros
Nmin, Nmax nos indica cuando ocurre un nacimiento donde haya una celula muerta.
Definimos la regla semitotalıstica φ[Smin, Smax, Nmin, Nmax] como la regla local para una ve-
cindad H que evoluciona de la siguiente manera:
φ[Smin, Smax, Nmin, Nmax](xH) :=
1 si
x(i,j) = 0 y Nmin 6∑
[k,l]∈[−1,1]2x(i+k,j+l) 6 Nmax
x(i,j) = 1 y Smin 6∑
[k,l]∈[−1,1]2x(i+k,j+l) 6 Smax
0 en otro caso
(3-17)
18 3 Generalizacion de Automatas Celulares
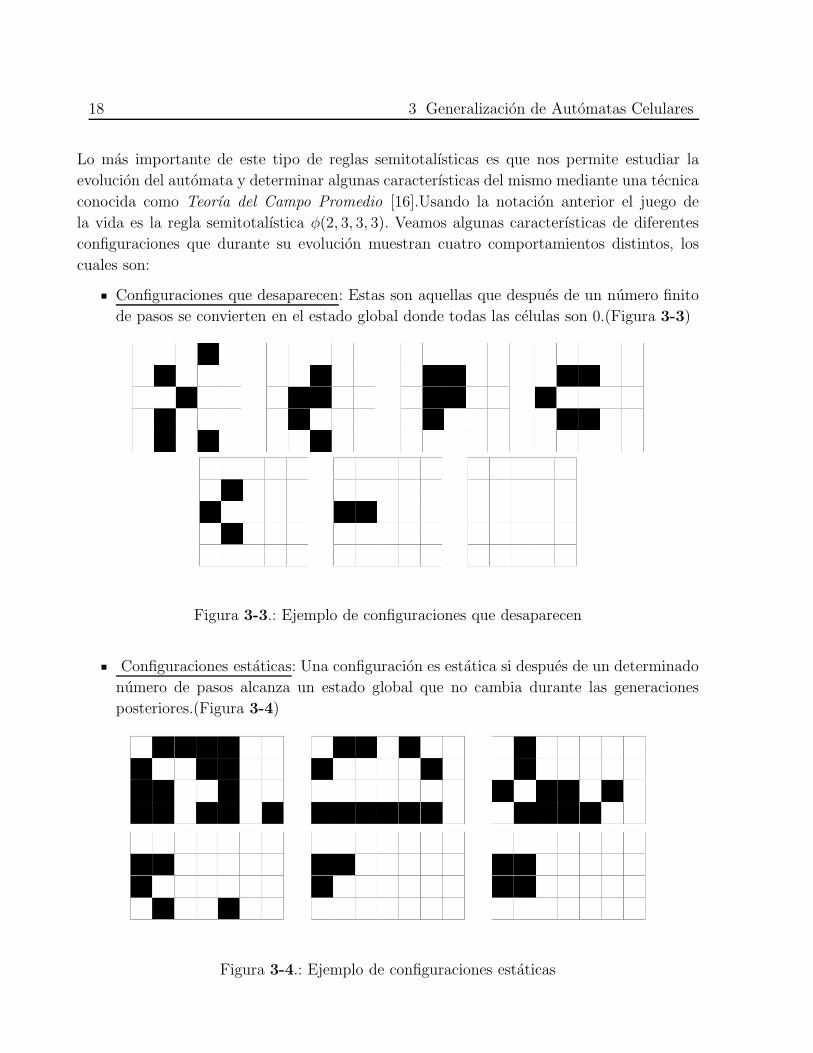
Lo mas importante de este tipo de reglas semitotalısticas es que nos permite estudiar la
evolucion del automata y determinar algunas caracterısticas del mismo mediante una tecnica
conocida como Teorıa del Campo Promedio [16].Usando la notacion anterior el juego de
la vida es la regla semitotalıstica φ(2, 3, 3, 3). Veamos algunas caracterısticas de diferentes
configuraciones que durante su evolucion muestran cuatro comportamientos distintos, los
cuales son:
Configuraciones que desaparecen: Estas son aquellas que despues de un numero finito
de pasos se convierten en el estado global donde todas las celulas son 0.(Figura 3-3)
Figura 3-3.: Ejemplo de configuraciones que desaparecen
Configuraciones estaticas: Una configuracion es estatica si despues de un determinado
numero de pasos alcanza un estado global que no cambia durante las generaciones
posteriores.(Figura 3-4)
Figura 3-4.: Ejemplo de configuraciones estaticas
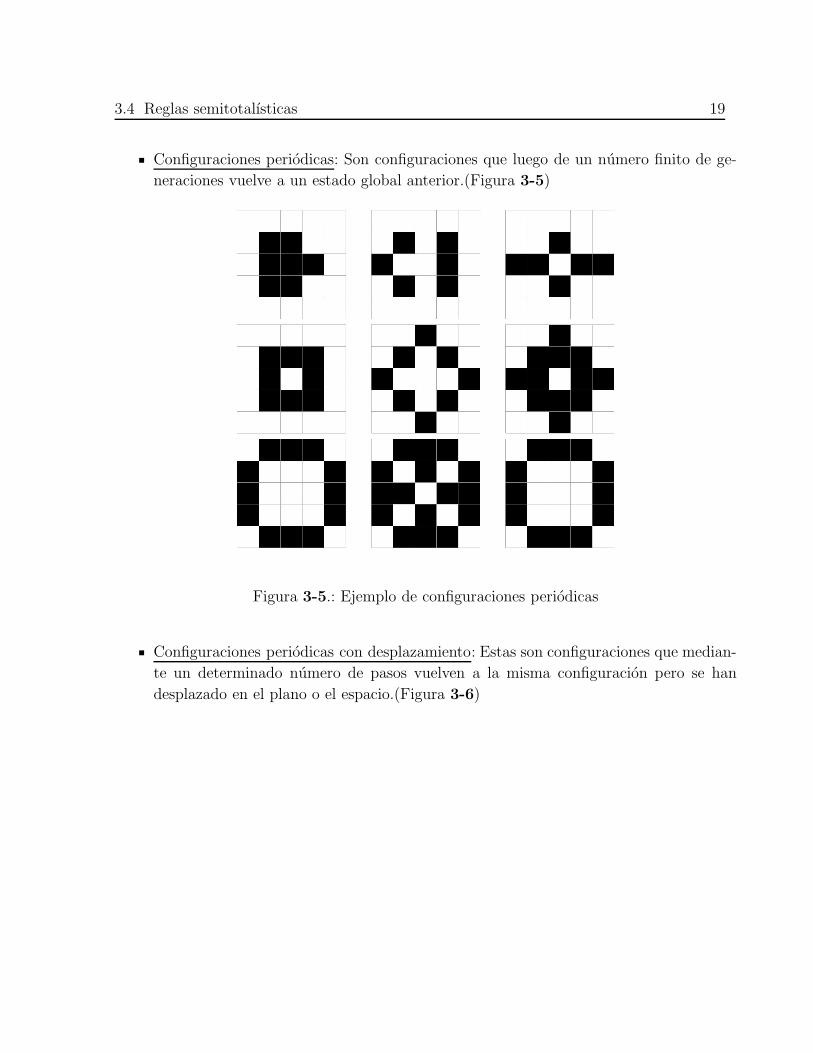
3.4 Reglas semitotalısticas 19
Configuraciones periodicas: Son configuraciones que luego de un numero finito de ge-
neraciones vuelve a un estado global anterior.(Figura 3-5)
Figura 3-5.: Ejemplo de configuraciones periodicas
Configuraciones periodicas con desplazamiento: Estas son configuraciones que median-
te un determinado numero de pasos vuelven a la misma configuracion pero se han
desplazado en el plano o el espacio.(Figura 3-6)
20 3 Generalizacion de Automatas Celulares
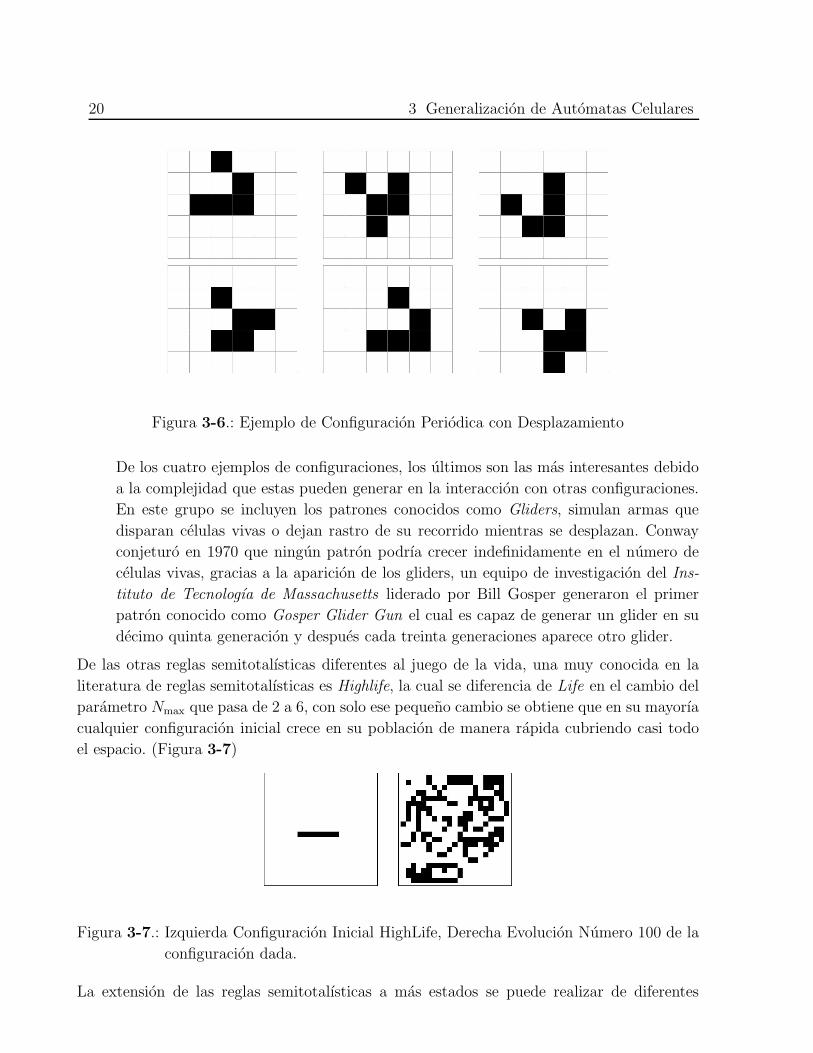
Figura 3-6.: Ejemplo de Configuracion Periodica con Desplazamiento
De los cuatro ejemplos de configuraciones, los ultimos son las mas interesantes debido
a la complejidad que estas pueden generar en la interaccion con otras configuraciones.
En este grupo se incluyen los patrones conocidos como Gliders, simulan armas que
disparan celulas vivas o dejan rastro de su recorrido mientras se desplazan. Conway
conjeturo en 1970 que ningun patron podrıa crecer indefinidamente en el numero de
celulas vivas, gracias a la aparicion de los gliders, un equipo de investigacion del Ins-
tituto de Tecnologıa de Massachusetts liderado por Bill Gosper generaron el primer
patron conocido como Gosper Glider Gun el cual es capaz de generar un glider en su
decimo quinta generacion y despues cada treinta generaciones aparece otro glider.
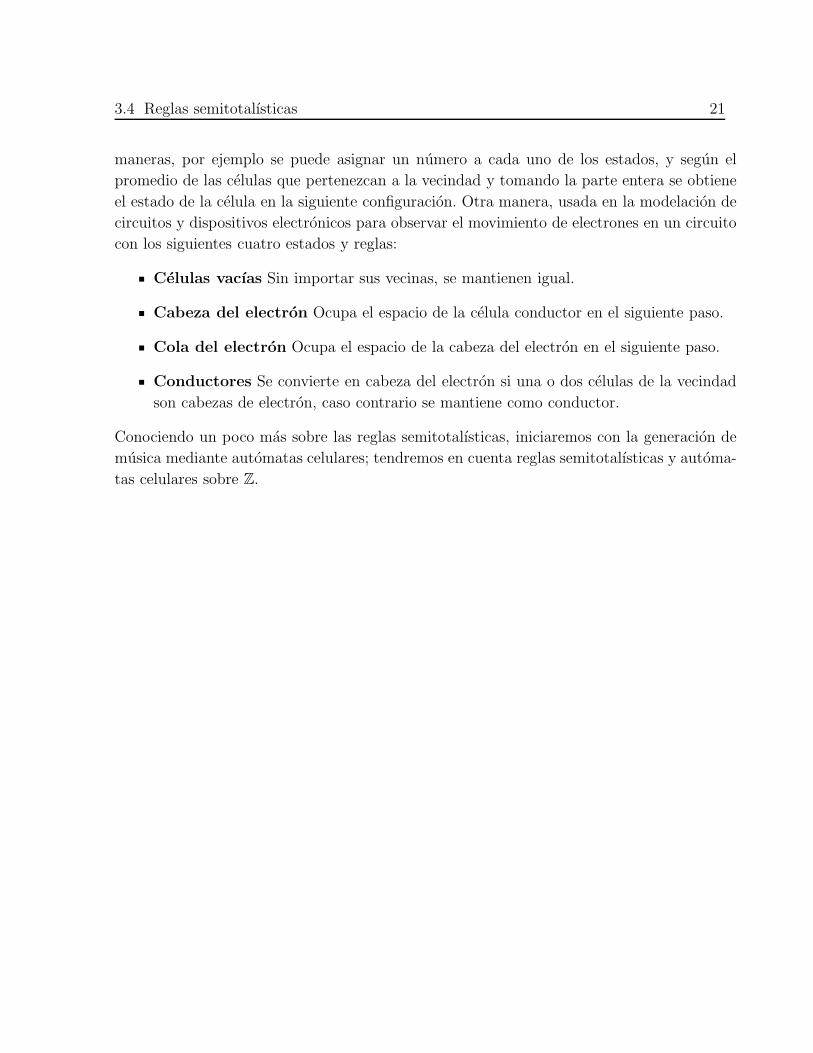
De las otras reglas semitotalısticas diferentes al juego de la vida, una muy conocida en la
literatura de reglas semitotalısticas es Highlife, la cual se diferencia de Life en el cambio del
parametro Nmax que pasa de 2 a 6, con solo ese pequeno cambio se obtiene que en su mayorıa
cualquier configuracion inicial crece en su poblacion de manera rapida cubriendo casi todo
el espacio. (Figura 3-7)
Figura 3-7.: Izquierda Configuracion Inicial HighLife, Derecha Evolucion Numero 100 de la
configuracion dada.
La extension de las reglas semitotalısticas a mas estados se puede realizar de diferentes
3.4 Reglas semitotalısticas 21
maneras, por ejemplo se puede asignar un numero a cada uno de los estados, y segun el
promedio de las celulas que pertenezcan a la vecindad y tomando la parte entera se obtiene
el estado de la celula en la siguiente configuracion. Otra manera, usada en la modelacion de
circuitos y dispositivos electronicos para observar el movimiento de electrones en un circuito
con los siguientes cuatro estados y reglas:
Celulas vacıas Sin importar sus vecinas, se mantienen igual.
Cabeza del electron Ocupa el espacio de la celula conductor en el siguiente paso.
Cola del electron Ocupa el espacio de la cabeza del electron en el siguiente paso.
Conductores Se convierte en cabeza del electron si una o dos celulas de la vecindad
son cabezas de electron, caso contrario se mantiene como conductor.
Conociendo un poco mas sobre las reglas semitotalısticas, iniciaremos con la generacion de
musica mediante automatas celulares; tendremos en cuenta reglas semitotalısticas y automa-
tas celulares sobre Z.
4. Automatas celulares y musica
El objetivo de esta seccion es relacionar la idea de automata celular con la generacion de
musica, para esto haremos uso de el software Mathematica 8, por ende debemos conocer los
comandos usados por el programa para la generacion de sonidos y probaremos con diferentes
configuraciones iniciales y programaciones distintas para mejorar las piezas musicales.
4.1. Musica con automatas lineales
Empezaremos con el caso mas sencillo de generacion de piezas musicales que es con automa-
tas celulares lineales. Para cumplir el objetivo se debe conocer primero los cuerpos de los
comandos que se usaran en el software Mathematica para la evolucion de los automatas
celulares y para la produccion del sonido. Mathematica tiene un programa predeterminado
llamado CellularAutomaton, este comando permite ver la evolucion de la condicion ini-
cial, a partir de matrices, dado el numero de pasos que se desea conocer la evolucion del
mismo. El cuerpo de este programa es:
CellularAutomaton[Regla,Condicion Inicial,Numero de generaciones]
Cada uno de estos datos se debe indicar de la siguiente manera.
Regla: En esta parte debemos indicar el numero de Wolfram que representa la regla
en notacion decimal. La informacion aquı suministrada se puede escribir de diferentes
maneras segun el numero de estados y la longitud de las vecindades. La tabla 4-1
contiene la informacion mas detallada de las posibles opciones que el software admite
en el caso de automatas lineales.
INSTRUCCIONES INFORMACION # Reglas
n Regla n−esima con vecindades de radio 1 y 2 estados. 256
{n, k} Regla n−esima con vecindades de radio 1 y k estados. kk3
{n, k, r} Regla n−esima con vecindades de radio r y k estados. kk2r+1
Cuadro 4-1.: Instrucciones comandos Mathematica

4.1 Musica con automatas lineales 23
Condicion inicial: En esta parte se debe colocar el vector (caso lineal) al cual le
sera aplicada la regla de evolucion elegida. Se debe tener en cuenta que los elementos
que van a estar en la matriz deben pertenecer al conjunto {0, 1, · · · , k − 1} si se va a
analizar la evolucion con k estados, en el caso de elegirse uno o mas estados el software
mostrara un error de evolucion.
Evolucion: El numero que se indique en esta seccion determina el numero de veces
que se aplicara recursivamente la funcion de evolucion asociado al numero de Wolfram
sobre el vector descrito en la casilla de condicion inicial.
Una vez los tres datos son incluidos dentro del cuerpo del comando CellularAutomaton,
el software genera una matriz con tantas columnas como posee el vector original y tantas
filas como el sucesor del numero escrito en la casilla de evolucion. Por ejemplo, si se escri-
be CellularAutomaton[{14764, 3, 2}, {0, 2, 2, 1, 2, 0, 0, 0}, 10}] , va a generar una lista de 11
vectores que muestran las siguientes diez generaciones del vector {0, 2, 2, 1, 2, 0, 0, 0} segun
la regla 14764 de 3243 reglas en total. Una manera sencilla de apreciar la evolucion es grafica-
mente y para ello, Mathematica tiene el comando ArrayPlot el cual genera una cuadrıcula
a partir de una matriz, y asigna a cada estado un color, de manera predeterminado cuando
hay mas de dos estados se asigna en una escala de grises pero si se desea se puede asignar
el color a cada estado segun se desee, para el siguiente ejemplo se van a usar los colores que
aparecen a continuacion:
ESTADO → COLOR
0 → BLANCO
1 → AZUL
2 → NEGRO
Cuadro 4-2.: Convencion colores del automata
Para lograr que el programa asuma estos colores se debe usar dentro del cuerpo del comando
ArrayPlot, la opcion ColorRules. Para el ejemplo que se desea visualizar la programacion
es la siguiente:
ArrayPlot[CellularAutomaton[{14764, 3, 2}, {0, 2, 2, 1, 2, 0, 0, 0}, 10], ColorRules
→ {0 → white, 1 → blue, 2 → black }].
Y el resultado es:
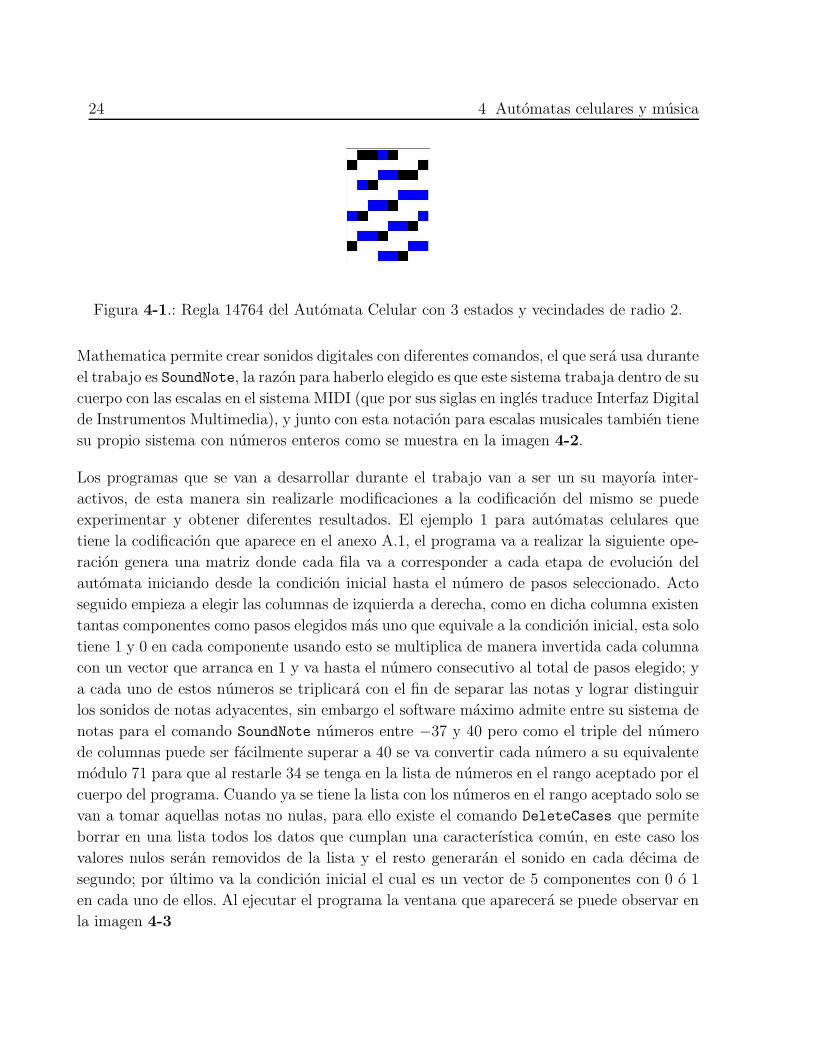
24 4 Automatas celulares y musica
Figura 4-1.: Regla 14764 del Automata Celular con 3 estados y vecindades de radio 2.
Mathematica permite crear sonidos digitales con diferentes comandos, el que sera usa durante
el trabajo es SoundNote, la razon para haberlo elegido es que este sistema trabaja dentro de su
cuerpo con las escalas en el sistema MIDI (que por sus siglas en ingles traduce Interfaz Digital
de Instrumentos Multimedia), y junto con esta notacion para escalas musicales tambien tiene
su propio sistema con numeros enteros como se muestra en la imagen 4-2.
Los programas que se van a desarrollar durante el trabajo van a ser un su mayorıa inter-
activos, de esta manera sin realizarle modificaciones a la codificacion del mismo se puede
experimentar y obtener diferentes resultados. El ejemplo 1 para automatas celulares que
tiene la codificacion que aparece en el anexo A.1, el programa va a realizar la siguiente ope-
racion genera una matriz donde cada fila va a corresponder a cada etapa de evolucion del
automata iniciando desde la condicion inicial hasta el numero de pasos seleccionado. Acto
seguido empieza a elegir las columnas de izquierda a derecha, como en dicha columna existen
tantas componentes como pasos elegidos mas uno que equivale a la condicion inicial, esta solo
tiene 1 y 0 en cada componente usando esto se multiplica de manera invertida cada columna
con un vector que arranca en 1 y va hasta el numero consecutivo al total de pasos elegido; y
a cada uno de estos numeros se triplicara con el fin de separar las notas y lograr distinguir
los sonidos de notas adyacentes, sin embargo el software maximo admite entre su sistema de
notas para el comando SoundNote numeros entre −37 y 40 pero como el triple del numero
de columnas puede ser facilmente superar a 40 se va convertir cada numero a su equivalente
modulo 71 para que al restarle 34 se tenga en la lista de numeros en el rango aceptado por el
cuerpo del programa. Cuando ya se tiene la lista con los numeros en el rango aceptado solo se
van a tomar aquellas notas no nulas, para ello existe el comando DeleteCases que permite
borrar en una lista todos los datos que cumplan una caracterıstica comun, en este caso los
valores nulos seran removidos de la lista y el resto generaran el sonido en cada decima de
segundo; por ultimo va la condicion inicial el cual es un vector de 5 componentes con 0 o 1
en cada uno de ellos. Al ejecutar el programa la ventana que aparecera se puede observar en
la imagen 4-3
4.1 Musica con automatas lineales 25
Figura 4-2.: Asociacion de las notas del piano con el sistema MIDI y la notacion de
Mathematica.
26 4 Automatas celulares y musica
Figura 4-3.: Ventana ejemplo 1 automatas celulares lineales. Regla:150, Numero de pasos:
20, Condicion inicial: (1, 0, 1, 0, 1)
En la parte superior se puede elegir entre una de las seis reglas propuestas, se eligieron estas
seis por su comportamiento caotico ,y entre 20, 30 y 40 pasos segun la longitud del sonido
que se desee escuchar, para finalizar aparece una grilla con cinco cajas donde se puede dar
click para intercambiar entre el estado 0 o 1 a cada una y de esa manera elegir la condicion
inicial por la cual el celular va a evolucionar. El programa ejecuta simultaneamente el sonido
y la imagen que muestra la evolucion del automata de la manera indicada anteriormente,
cada vez que se realice una modificacion a alguno de los datos el programa vuelve a correr.
El proximo programa realizara el mismo proceso pero con tres automatas lineales que tendran
una condicion inicial independiente y con la posibilidad de desplazar la condicion inicial una
de la otra. Sin embargo todos van a tener la misma regla, el mismo numero de pasos para
su evolucion y a diferencia del anterior se puede seleccionar entre tres instrumentos para
escuchar diferentes melodıas. La programacion se encuentra en el anexo A.2. La ventana que
el programa muestra cuando es ejecutado se muestra en la imagen 4-4 Este ejemplo permite
mayor interaccion con el usuario, en el se pueden modificar las reglas y el numero de pasos
al igual que en el ejemplo 1, pero ademas se puede seleccionar cual de los tres instrumentos
predeterminados Tuba, Guitarra o Piano, ademas se puede seleccionar con cuantas matrices
se desea trabajar simultaneamente, de manera predeterminada se encuentra el valor 1. Los
siguientes recuadros van a desplegar tantas filas como se elija el valor de numero de matrices,
para el ejemplo de la imagen 4-4 se selecciono tres matrices y por ende aparecen tres filas en
4.2 Musica con automatas 2−dimensionales 27
Figura 4-4.: Ventana ejemplo 2 automatas celulares lineales. Regla:18, Numero de pasos: 40
la seccion de ubicacion de los automatas y condiciones iniciales. Al igual que en el ejemplo 1,
la matriz de condiciones iniciales se puede modificar dando click en cada recuadro, lo nuevo
son las barras de ubicacion que permiten separar las condiciones iniciales tantos cuadros
como se desee.
El ultimo ejemplo de casos lineales se basa en el anterior, la diferencia es que en este ejemplo
van a sonar tres instrumentos de manera simultanea con reglas de evolucion independientes
y con la opcion de separar cada condicion inicial del anterior. Cada automata tendra un
color propio y seran los siguientes: Tuba con color amarillo, Guitarra con color azul y Piano
con color rojo. Pero no son los unicos colores que aparecen en el sistema, basandose en
las combinaciones de la escala cromatica si suenan en la misma nota al mismo instante
los instrumentos Guitarra y Tuba el cuadrado aparecera de color verde, Guitarra y Piano
morado, Piano y Tuba naranja, y si suenan los tres el color sera negro, ası es posible visualizar
en que ocasiones estan sonando cada uno de los instrumentos. El codigo de este programa
se encuentra en el anexo A.3.
4.2. Musica con automatas 2−dimensionales
Al trabajar en 2 dimensiones, la cantidad de reglas que se pueden elegir es muchısimo mas
alta y la interaccion entre notas agudas y graves es mucho mayor, por ende la produccion
en este caso es muchısimo mas enriquecedora. Una herramienta que vamos a usar en la gran
mayorıa de los ejemplos en dos dimensiones, es la matriz 4-1. La llamaremos, la matriz de
sonido y simplemente es una matriz de tamano 7× 7, para un solo instrumento donde cada

28 4 Automatas celulares y musica
Figura 4-5.: Ventana ejemplo 3 automatas celulares lineales. Tres reglas de evolucion distin-
tas, con 30 evoluciones y condiciones iniciales diferentes
columna indicara la letra de la nota que va a sonar {C,D,E, F,G,A} y cada fila tendra un
numero del 0 al 6, para que cada espacio del arreglo simbolice una unica nota.
C0 D0 E0 F0 G0 A0 B0
C1 D1 E1 F1 G1 A1 B1
C2 D2 E2 F2 G2 A2 B2
C3 D3 E3 F3 G3 A3 B3
C4 D4 E4 F4 G4 A4 B4
C5 D5 E5 F5 G5 A5 B5
C6 D6 E6 F6 G6 A6 B6
(4-1)
La idea es correr sobre esta matriz un automata bidimensional con multiples estados y se
elegiran una cierta cantidad de notas segun se elija en la ventana del programa, con el fin
que el sonido emitido en cada instante este controlado. A diferencia del caso lineal, en este
caso se va a tomar diferentes tipos de vecindades, esto va a ocasionar que algunos programas
sean muy extensos ya que Mathematica no trabaja con vecindades de Von Neumann. En los
dos primeros ejemplos se va a tomar dos posibles estados, de tal manera que aquellos lugares
donde la casilla sea 1 van a ser elegidos y de ellos una cantidad va a sonar, estos valores
seran tomados aleatoriamente por el programa. Aquı ya no es posible visualizar durante la
evolucion los estados anteriores debido a que el software cuando trabaja con evolucion en 3D
se torna muy lento, lo que se va a observar es cada estado en cada decima de segundo que
dure la evolucion. La imagen 4-6 muestra la ventana que se despliega cuando el programa
es ejecutado.
4.2 Musica con automatas 2−dimensionales 29
Figura 4-6.: Ventana ejemplo 1 automatas celulares bidimensionales.
El codigo de este ejemplo se encuentra en el anexo B.1. Esta ventana despliega diferentes
pestanas interactivas que se explican a continuacion:
Numero de pasos: indica cuantas veces evoluciona el automata segun la regla indicada.
Numero de notas a tomar: selecciona del total de notas con estado 1 el numero de
notas que se deseen escuchar. Se pueden elegir desde 5 hasta 10. (Ver imagen superior
izquierda tabla 4-3)
Eleccion de regla: se encuentran tres opciones para la eleccion de la regla:
• Predeterminados: son seis opciones de reglas que el computador elije aleatoria-
mente. (Ver imagen superior derecha tabla 4-3)
• Escribir regla: permite digitar el numero decimal de la regla de evolucion. (Ver
imagen inferior izquierda tabla 4-3)
• Aleatoria: si se desea elegir otra regla diferente a las del casos Predeterminados,
el software elije otra regla.(Ver imagen inferior derecha tabla 4-3)
Regla primer automata: en cada caso de los anteriores se despliega una forma diferente
para la eleccion de la regla de evolucion.
Condicion inicial: es una matriz de tamano 7 × 7 a la cual se le puede cambiar cada
componente entre el valor 1 y 0 dando click en cada recuadro.
30 4 Automatas celulares y musica
Cuadro 4-3.: Ventanas interactivas para el ejemplo 1 de automatas celulares bidimensionales.
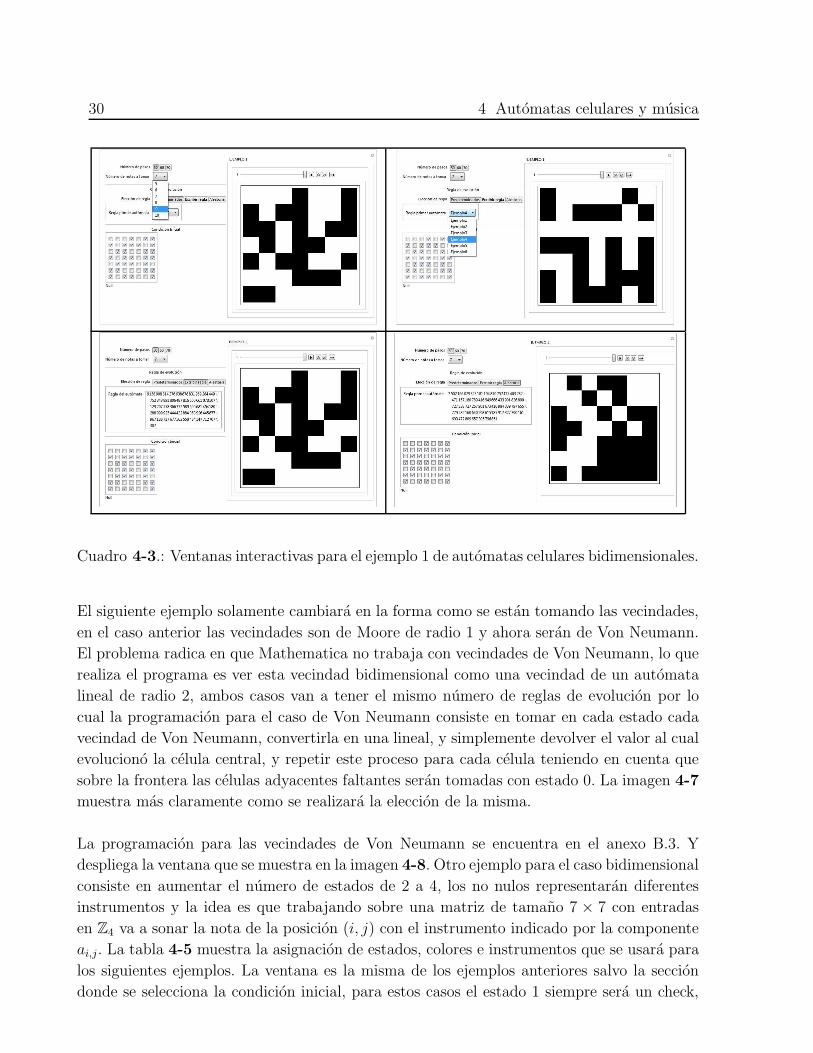
El siguiente ejemplo solamente cambiara en la forma como se estan tomando las vecindades,
en el caso anterior las vecindades son de Moore de radio 1 y ahora seran de Von Neumann.
El problema radica en que Mathematica no trabaja con vecindades de Von Neumann, lo que
realiza el programa es ver esta vecindad bidimensional como una vecindad de un automata
lineal de radio 2, ambos casos van a tener el mismo numero de reglas de evolucion por lo
cual la programacion para el caso de Von Neumann consiste en tomar en cada estado cada
vecindad de Von Neumann, convertirla en una lineal, y simplemente devolver el valor al cual
evoluciono la celula central, y repetir este proceso para cada celula teniendo en cuenta que
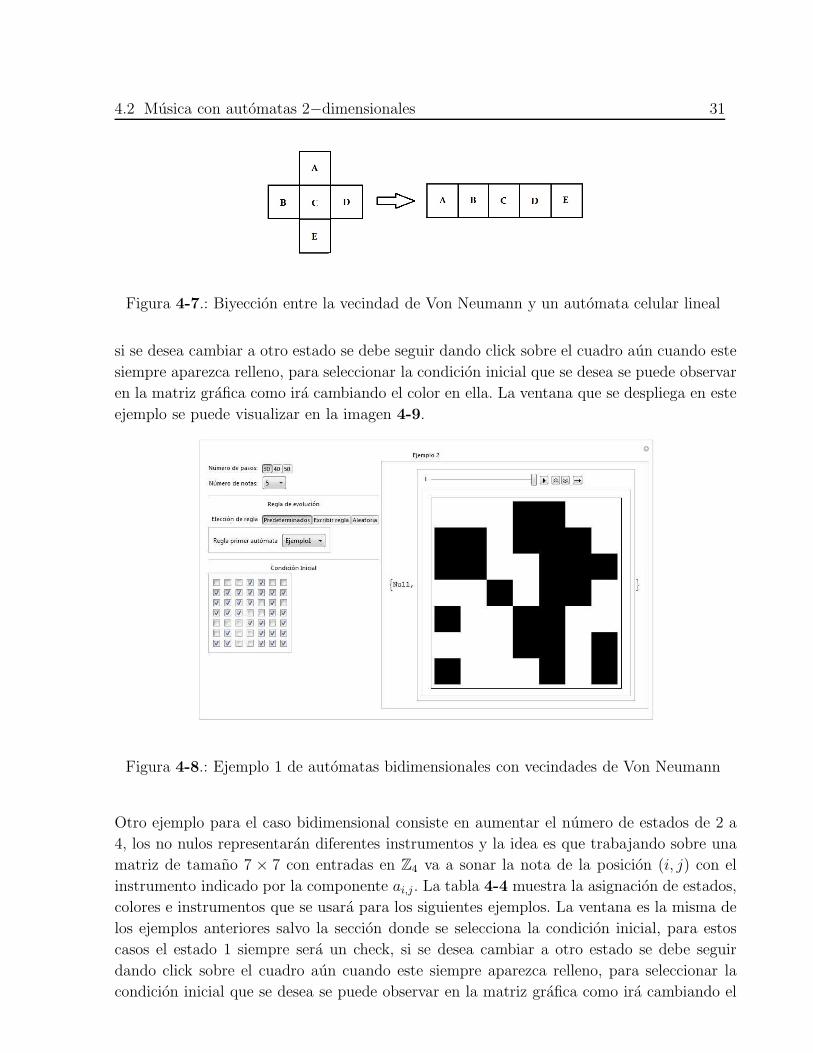
sobre la frontera las celulas adyacentes faltantes seran tomadas con estado 0. La imagen 4-7
muestra mas claramente como se realizara la eleccion de la misma.
La programacion para las vecindades de Von Neumann se encuentra en el anexo B.3. Y
despliega la ventana que se muestra en la imagen 4-8. Otro ejemplo para el caso bidimensional
consiste en aumentar el numero de estados de 2 a 4, los no nulos representaran diferentes
instrumentos y la idea es que trabajando sobre una matriz de tamano 7 × 7 con entradas
en Z4 va a sonar la nota de la posicion (i, j) con el instrumento indicado por la componente
ai,j. La tabla 4-5 muestra la asignacion de estados, colores e instrumentos que se usara para
los siguientes ejemplos. La ventana es la misma de los ejemplos anteriores salvo la seccion
donde se selecciona la condicion inicial, para estos casos el estado 1 siempre sera un check,
4.2 Musica con automatas 2−dimensionales 31
Figura 4-7.: Biyeccion entre la vecindad de Von Neumann y un automata celular lineal
si se desea cambiar a otro estado se debe seguir dando click sobre el cuadro aun cuando este
siempre aparezca relleno, para seleccionar la condicion inicial que se desea se puede observar
en la matriz grafica como ira cambiando el color en ella. La ventana que se despliega en este
ejemplo se puede visualizar en la imagen 4-9.
Figura 4-8.: Ejemplo 1 de automatas bidimensionales con vecindades de Von Neumann
Otro ejemplo para el caso bidimensional consiste en aumentar el numero de estados de 2 a
4, los no nulos representaran diferentes instrumentos y la idea es que trabajando sobre una
matriz de tamano 7 × 7 con entradas en Z4 va a sonar la nota de la posicion (i, j) con el
instrumento indicado por la componente ai,j . La tabla 4-4 muestra la asignacion de estados,
colores e instrumentos que se usara para los siguientes ejemplos. La ventana es la misma de
los ejemplos anteriores salvo la seccion donde se selecciona la condicion inicial, para estos
casos el estado 1 siempre sera un check, si se desea cambiar a otro estado se debe seguir
dando click sobre el cuadro aun cuando este siempre aparezca relleno, para seleccionar la
condicion inicial que se desea se puede observar en la matriz grafica como ira cambiando el
32 4 Automatas celulares y musica
color en ella. La ventana que se despliega en este ejemplo se puede visualizar en la imagen
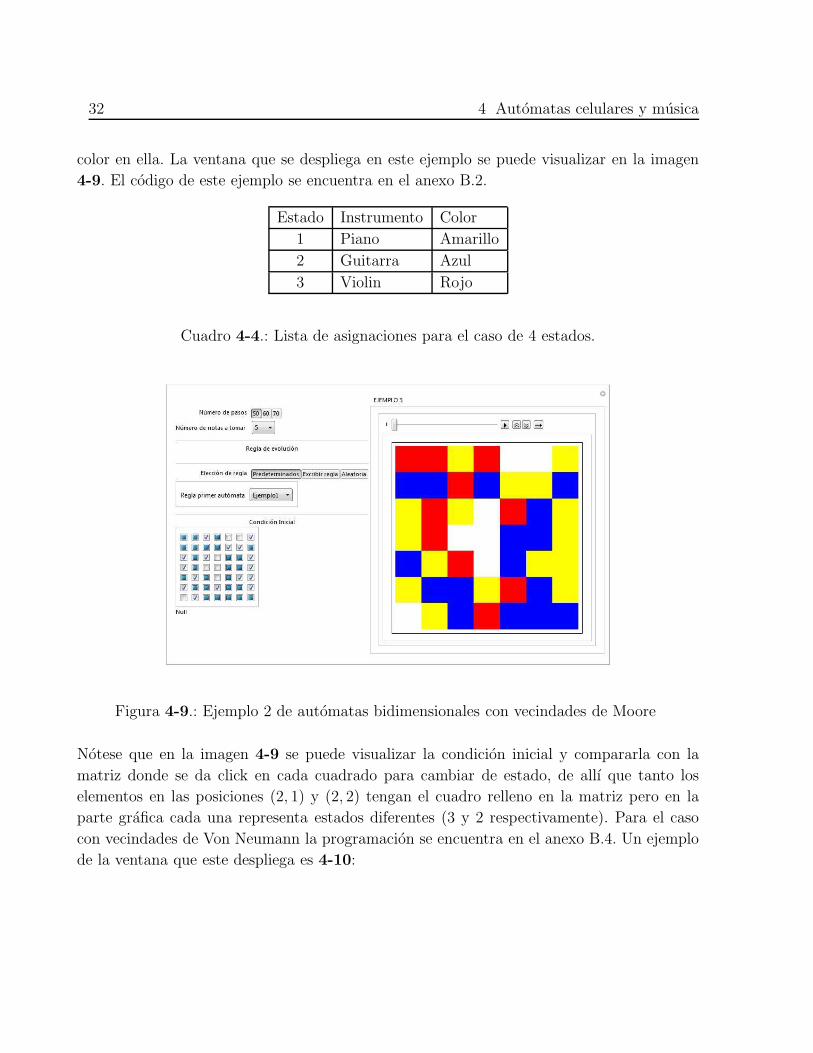
4-9. El codigo de este ejemplo se encuentra en el anexo B.2.
Estado Instrumento Color
1 Piano Amarillo
2 Guitarra Azul
3 Violin Rojo
Cuadro 4-4.: Lista de asignaciones para el caso de 4 estados.
Figura 4-9.: Ejemplo 2 de automatas bidimensionales con vecindades de Moore
Notese que en la imagen 4-9 se puede visualizar la condicion inicial y compararla con la
matriz donde se da click en cada cuadrado para cambiar de estado, de allı que tanto los
elementos en las posiciones (2, 1) y (2, 2) tengan el cuadro relleno en la matriz pero en la
parte grafica cada una representa estados diferentes (3 y 2 respectivamente). Para el caso
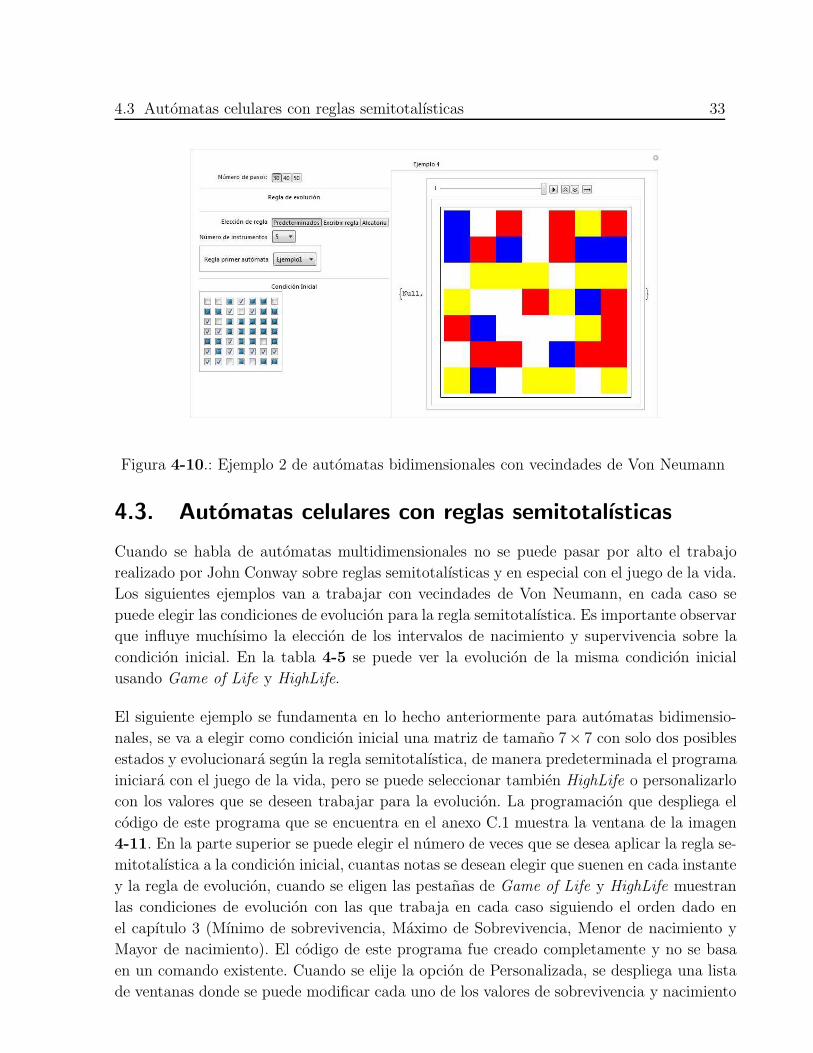
con vecindades de Von Neumann la programacion se encuentra en el anexo B.4. Un ejemplo
de la ventana que este despliega es 4-10:
4.3 Automatas celulares con reglas semitotalısticas 33
Figura 4-10.: Ejemplo 2 de automatas bidimensionales con vecindades de Von Neumann
4.3. Automatas celulares con reglas semitotalısticas
Cuando se habla de automatas multidimensionales no se puede pasar por alto el trabajo
realizado por John Conway sobre reglas semitotalısticas y en especial con el juego de la vida.
Los siguientes ejemplos van a trabajar con vecindades de Von Neumann, en cada caso se
puede elegir las condiciones de evolucion para la regla semitotalıstica. Es importante observar
que influye muchısimo la eleccion de los intervalos de nacimiento y supervivencia sobre la
condicion inicial. En la tabla 4-5 se puede ver la evolucion de la misma condicion inicial
usando Game of Life y HighLife.
El siguiente ejemplo se fundamenta en lo hecho anteriormente para automatas bidimensio-
nales, se va a elegir como condicion inicial una matriz de tamano 7× 7 con solo dos posibles
estados y evolucionara segun la regla semitotalıstica, de manera predeterminada el programa
iniciara con el juego de la vida, pero se puede seleccionar tambien HighLife o personalizarlo
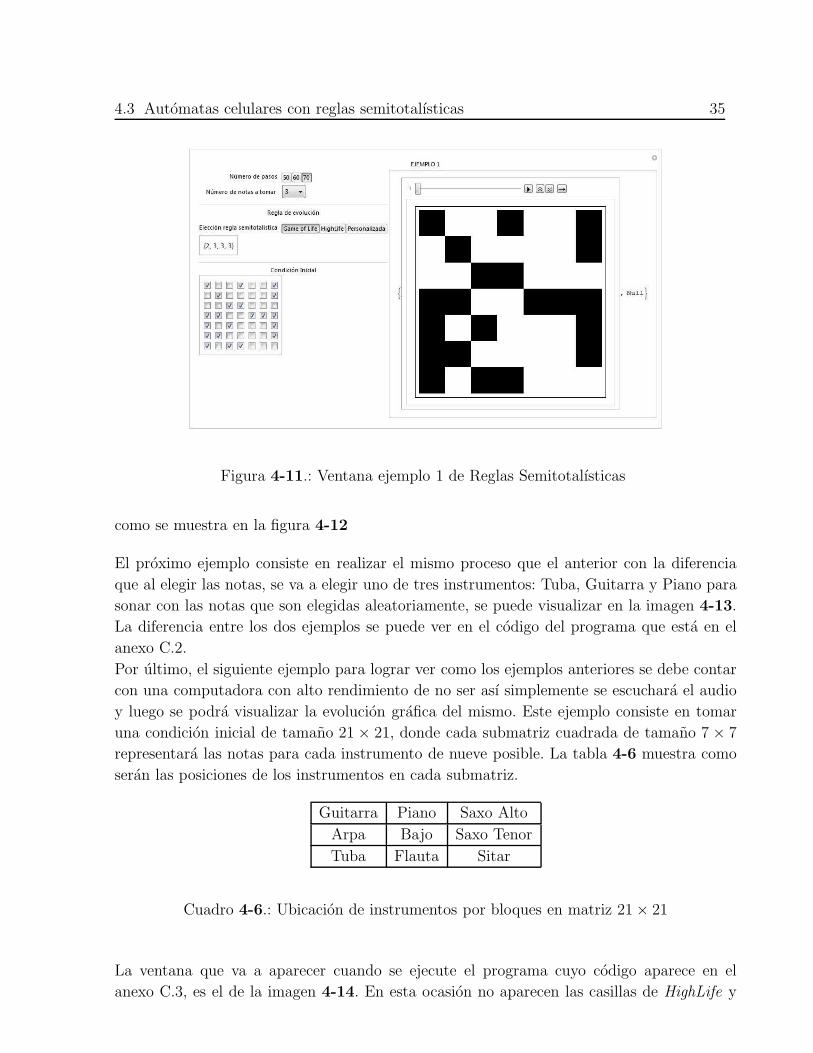
con los valores que se deseen trabajar para la evolucion. La programacion que despliega el
codigo de este programa que se encuentra en el anexo C.1 muestra la ventana de la imagen
4-11. En la parte superior se puede elegir el numero de veces que se desea aplicar la regla se-
mitotalıstica a la condicion inicial, cuantas notas se desean elegir que suenen en cada instante
y la regla de evolucion, cuando se eligen las pestanas de Game of Life y HighLife muestran
las condiciones de evolucion con las que trabaja en cada caso siguiendo el orden dado en
el capıtulo 3 (Mınimo de sobrevivencia, Maximo de Sobrevivencia, Menor de nacimiento y
Mayor de nacimiento). El codigo de este programa fue creado completamente y no se basa
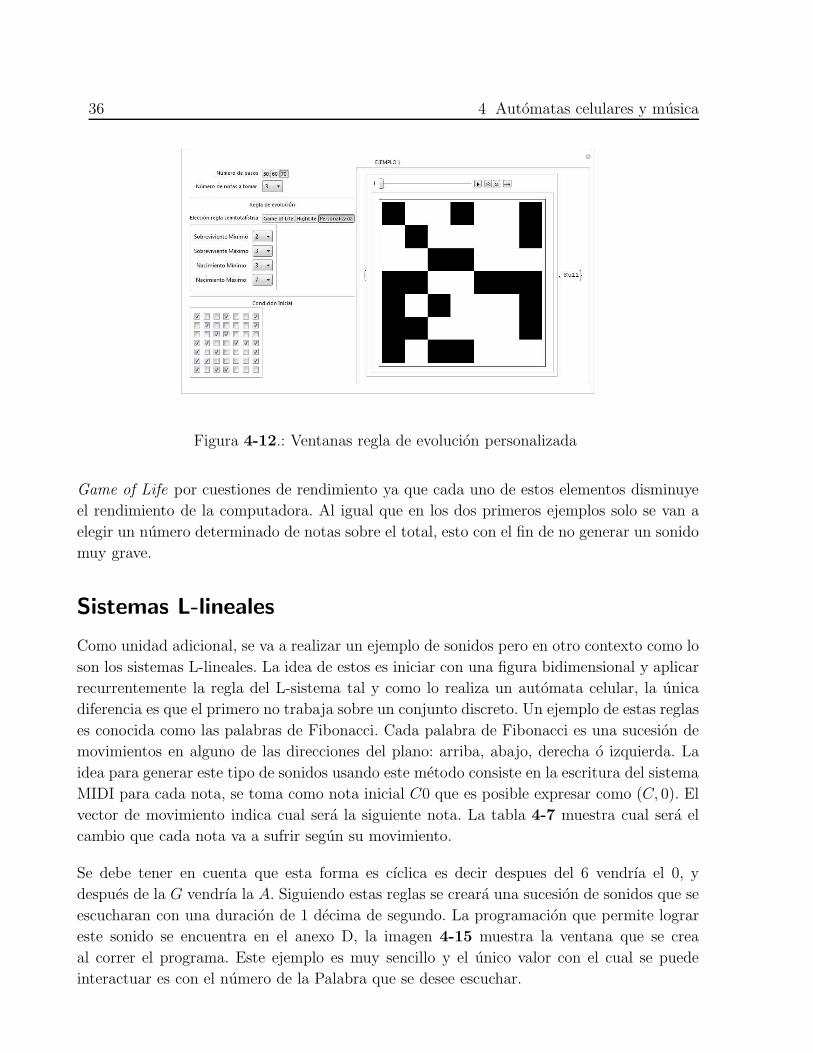
en un comando existente. Cuando se elije la opcion de Personalizada, se despliega una lista
de ventanas donde se puede modificar cada uno de los valores de sobrevivencia y nacimiento

34 4 Automatas celulares y musica
Comparacion reglas semitotalısticas
Juego de la Vida R(2,3,3,3) HighLife R(2,3,3,6)
Estado Inicial Estado Inicial
Quinta Evolucion Quinta Evolucion
Decima Evolucion Decima Evolucion
Decima Quinta Evolucion Decima Quinta Evolucion
Vigesima Evolucion Vigesima Evolucion
Cuadro 4-5.: Cuadro comparativo de evoluciones entre Game of Life y Highlife
4.3 Automatas celulares con reglas semitotalısticas 35
Figura 4-11.: Ventana ejemplo 1 de Reglas Semitotalısticas
como se muestra en la figura 4-12
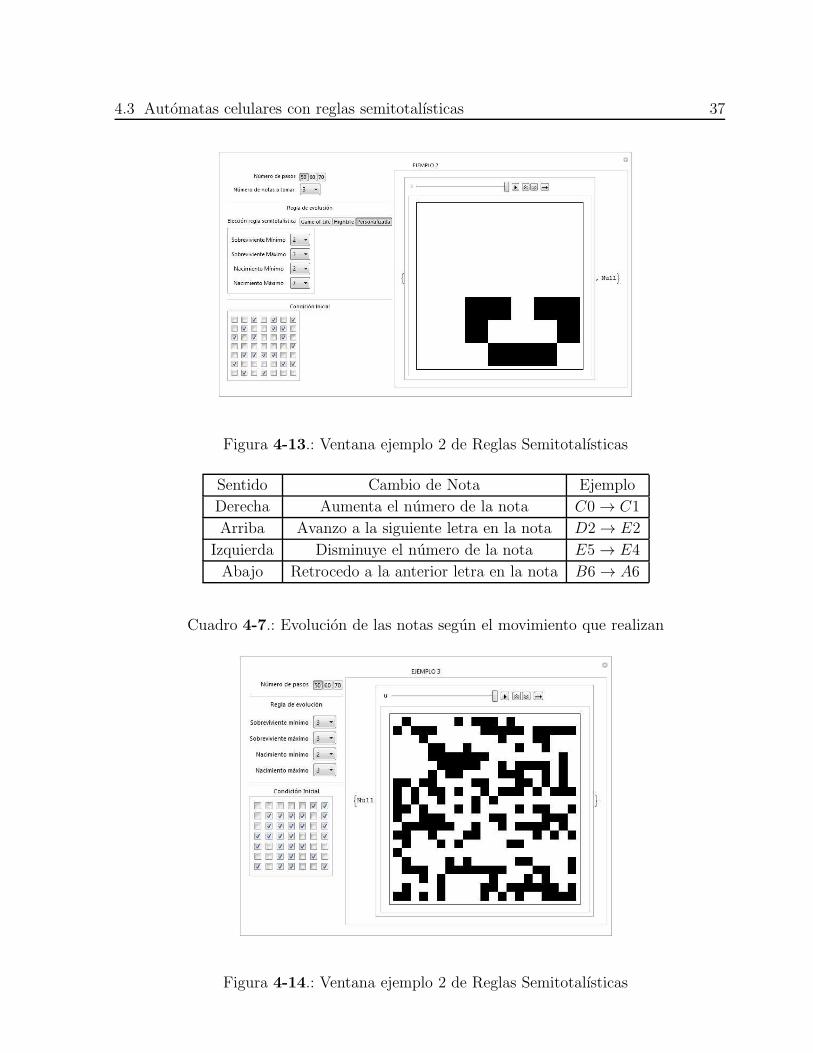
El proximo ejemplo consiste en realizar el mismo proceso que el anterior con la diferencia
que al elegir las notas, se va a elegir uno de tres instrumentos: Tuba, Guitarra y Piano para
sonar con las notas que son elegidas aleatoriamente, se puede visualizar en la imagen 4-13.
La diferencia entre los dos ejemplos se puede ver en el codigo del programa que esta en el
anexo C.2.
Por ultimo, el siguiente ejemplo para lograr ver como los ejemplos anteriores se debe contar
con una computadora con alto rendimiento de no ser ası simplemente se escuchara el audio
y luego se podra visualizar la evolucion grafica del mismo. Este ejemplo consiste en tomar
una condicion inicial de tamano 21 × 21, donde cada submatriz cuadrada de tamano 7 × 7
representara las notas para cada instrumento de nueve posible. La tabla 4-6 muestra como
seran las posiciones de los instrumentos en cada submatriz.
Guitarra Piano Saxo Alto
Arpa Bajo Saxo Tenor
Tuba Flauta Sitar
Cuadro 4-6.: Ubicacion de instrumentos por bloques en matriz 21× 21
La ventana que va a aparecer cuando se ejecute el programa cuyo codigo aparece en el
anexo C.3, es el de la imagen 4-14. En esta ocasion no aparecen las casillas de HighLife y
36 4 Automatas celulares y musica
Figura 4-12.: Ventanas regla de evolucion personalizada
Game of Life por cuestiones de rendimiento ya que cada uno de estos elementos disminuye
el rendimiento de la computadora. Al igual que en los dos primeros ejemplos solo se van a
elegir un numero determinado de notas sobre el total, esto con el fin de no generar un sonido
muy grave.
Sistemas L-lineales
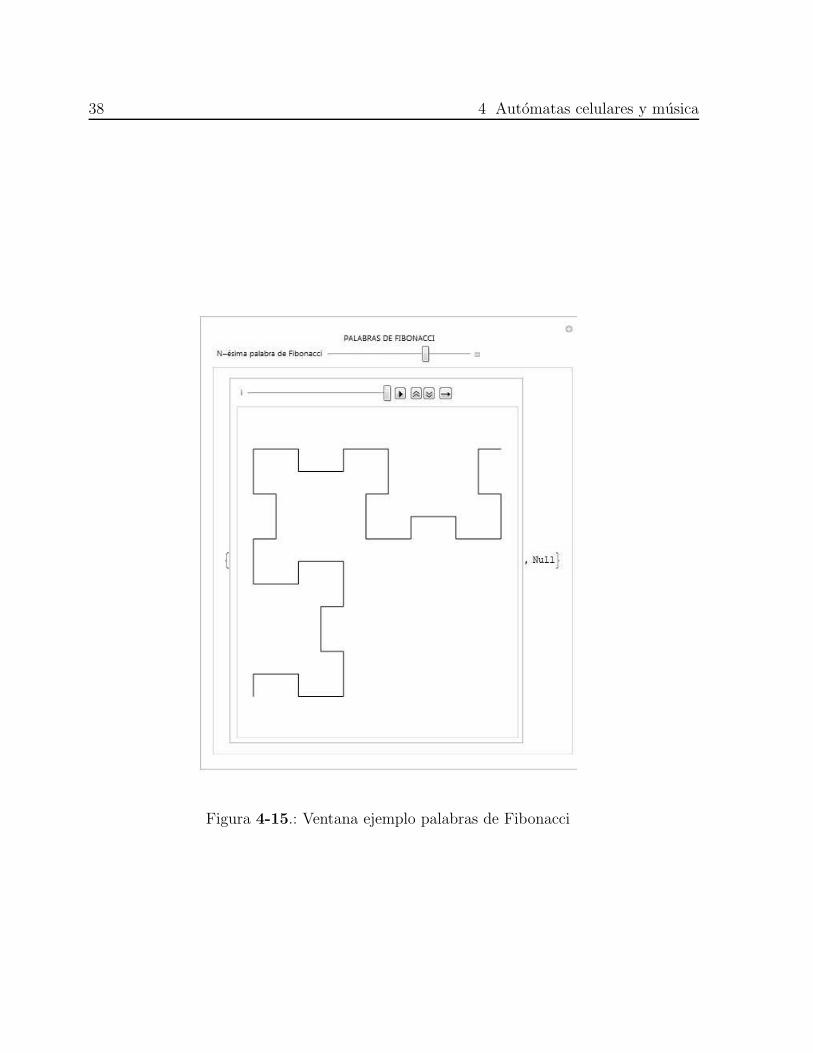
Como unidad adicional, se va a realizar un ejemplo de sonidos pero en otro contexto como lo
son los sistemas L-lineales. La idea de estos es iniciar con una figura bidimensional y aplicar
recurrentemente la regla del L-sistema tal y como lo realiza un automata celular, la unica
diferencia es que el primero no trabaja sobre un conjunto discreto. Un ejemplo de estas reglas
es conocida como las palabras de Fibonacci. Cada palabra de Fibonacci es una sucesion de
movimientos en alguno de las direcciones del plano: arriba, abajo, derecha o izquierda. La
idea para generar este tipo de sonidos usando este metodo consiste en la escritura del sistema
MIDI para cada nota, se toma como nota inicial C0 que es posible expresar como (C, 0). El
vector de movimiento indica cual sera la siguiente nota. La tabla 4-7 muestra cual sera el
cambio que cada nota va a sufrir segun su movimiento.
Se debe tener en cuenta que esta forma es cıclica es decir despues del 6 vendrıa el 0, y
despues de la G vendrıa la A. Siguiendo estas reglas se creara una sucesion de sonidos que se
escucharan con una duracion de 1 decima de segundo. La programacion que permite lograr
este sonido se encuentra en el anexo D, la imagen 4-15 muestra la ventana que se crea
al correr el programa. Este ejemplo es muy sencillo y el unico valor con el cual se puede
interactuar es con el numero de la Palabra que se desee escuchar.
4.3 Automatas celulares con reglas semitotalısticas 37
Figura 4-13.: Ventana ejemplo 2 de Reglas Semitotalısticas
Sentido Cambio de Nota Ejemplo
Derecha Aumenta el numero de la nota C0 → C1
Arriba Avanzo a la siguiente letra en la nota D2 → E2
Izquierda Disminuye el numero de la nota E5 → E4
Abajo Retrocedo a la anterior letra en la nota B6 → A6
Cuadro 4-7.: Evolucion de las notas segun el movimiento que realizan
Figura 4-14.: Ventana ejemplo 2 de Reglas Semitotalısticas
38 4 Automatas celulares y musica
Figura 4-15.: Ventana ejemplo palabras de Fibonacci
5. Conclusiones y recomendaciones
5.1. Conclusiones
La aplicacion de los automatas celulares en diferentes campos del conocimiento ha ido in-
crementando por su simplicidad, que conlleva en ocasiones a comportamientos difıciles de
simular con otro tipo de funciones, en el caso de la produccion musical genera piezas intere-
santes que en ocasiones se destacan por sonidos periodicos pero extranos. Ademas:
Los automatas lineales generan piezas caoticas con mayor facilidad pero su sonido no
es muy agradable cuando solo se usa un instrumento y todas las notas. Lo mejor es
tomar notas separadas en la escala musical ya que es mas evidente el comportamiento
del mismo.
Los automatas dos dimensionales tienden a generar sonidos mas fuertes debido a la
gran cantidad de notas que pueden sonar simultaneamente. En estos casos es mejor
introducir una funcion que seleccione algunas notas aleatoriamente para que se puedan
distinguir diferentes tonos.
Las reglas semitotalısticas son la mejor opcion para la generacion de sonidos armoni-
cos, debido a que controla la sobrepoblacion de celulas vivas en cada generacion, el
inconveniente es el tamano que se necesita para producir patrones como gliders que
mantengan la dinamica del automata.
5.2. Recomendaciones
El estudio de los automatas celulares ha ido generando gran importancia a nivel de investi-
gacion en matematica tanto teorica como aplicada, sin embargo es muchısima la cantidad de
preguntas que se encuentran abiertas en estas areas, y se muestran como inquietud en este
trabajo. A partir de este punto se pueden desarrollar otras investigaciones relacionadas con:
Identificacion de reglas con comportamientos caoticos en automatas bidimensionales.
Implicacion de la caracterıstica del automata celular (reversible, lineal, afın, etc.) en el
comportamiento caotico de los sistemas.
40 5 Conclusiones y recomendaciones
Generacion de sonidos mediante automatas que se retroalimenten de informacion de
otros automatas, y como esto puede encadenar mejores resultados de producciones de
sonidos digitales.
A. Codigos de programacion para
automatas lineales
A continuacion se muestran los codigos usados en la generacion de los programas y se realiza
una breve explicacion de su funcionamiento, se debe tener en cuenta que dicho codigo solo
es funcional en el software Mathematica:
A.1. Sonido Automata Celular Lineal 1
Ejemplo que permite cambiar los valores de un vector de cinco componentes que servira como
dato inicial para diferentes reglas.
Manipulate [
Animate [ ArrayPlot [
Transpose [
Table [ I f [ i < t + 1 ,
Cel lularAutomaton [ Regla ,{ data [ [ 1 ] ] , 0 } , Pasos ] [ [ Al l , i ] ] ,
Table [ 0 ,{ j , Pasos +1} ] ] ,
{ i , Dimensions [ Cel lularAutomaton [ Regla ,{ data [ [ 1 ] ] , 0 } , Pasos ] ] [ [ 2 ] ] } ] ] ] ,
{t , Dimensions [ Cel lularAutomaton [ Regla ,{ data [ [ 1 ] ] , 0 } , Pasos ] ] [ [ 2 ] ] , 1 } ,
DefaultDurat ion −>
Dimensions [ Cel lularAutomaton [ Regla ,{ data [ [ 1 ] ] , 0 } , Pasos ] ] [ [ 2 ] ] ∗ . 1 ,
Animat ionRepet i t ions −> 1 , AnimationRunning −> True ] ,
{Regla , {18 , 30 , 50 , 60 , 90 , 150} , ControlType −> Se t t e r } ,
{Pasos , {20 , 30 , 40}} ,
De l imi ter ,
Item [ ” Condici on I n i c i a l ” , Alignment −> Center ] ,
{{data , RandomInteger [{0 , 1} , {3 , 5} ]} , ControlType −> None} ,
Dynamic [
Panel [
Grid [
Outer [
Checkbox [ Dynamic [ data [ [#1 , #2 ] ] ] , {0 , 1} ] &, Range [ 1 ] , Range [ 5 ] ]
]
42 A Codigos de programacion para automatas lineales
]
] ,
Dynamic [
EmitSound [
Sound [
SoundNote [
Mod[
DeleteCases [
3 Range [ Pasos + 1 ] Reverse [#] , 0 ] , 7 1 ] − 34 , . 1 ] & /@
Transpose [ Cel lularAutomaton [ Regla , {data [ [ 1 ] ] , 0} , Pasos ]
]
]
]
] ,
FrameLabel −> {”” , ”” , ”EJEMPLO 1”} ]
A.2. Sonido Automata Celular Lineal 2
Version modificada del ejemplo 1 incluyendo eleccion de instrumentos, numero de condiciones
iniciales y separacion entre las mismas.
Sonido [ x ] := Switch [ x , ”Guitar ” , Red , ”Piano ” , Blue , ”Tuba” , Green ] ;
Manipulate [
Animate [ ArrayPlot [
Transpose [
Table [ I f [ i < t − Str ingLength [ Instrumento ] ,
Cel lularAutomaton [
Regla , {Take [{{ data [ [ 1 ] ] , {a }} , {data [ [ 2 ] ] , {b}} , {data [ [
3 ] ] , {c }}} , h ] , 0} , Pasos ] [ [ Al l , i ] ] ,
Table [ 0 , { j , Pasos + 1 } ] ] , { i ,
Dimensions [
Cel lularAutomaton [
Regla , {Take [{{ data [ [ 1 ] ] , {a}} , {data [ [ 2 ] ] , {b}} , {data [ [
3 ] ] , {c }}} , h ] , 0} , Pasos ] ] [ [ 2 ] ] } ] ] ,
ColorRules −> {1 −> Sonido [ Instrumento ] , 0 −> White } ] , {t ,
1 + Str ingLength [ Instrumento ] ,
Dimensions [
Cel lularAutomaton [
Regla , {Take [{{ data [ [ 1 ] ] , {a}} , {data [ [ 2 ] ] , {b}} , {data [ [
3 ] ] , {c }}} , h ] , 0} , Pasos ] ] [ [ 2 ] ] +
A.3 Sonido Automata Celular Lineal 3 43
Str ingLength [ Instrumento ] , 1} ,
DefaultDurat ion −>
Dimensions [
Cel lularAutomaton [
Regla , {Take [{{ data [ [ 1 ] ] , {a}} , {data [ [ 2 ] ] , {b}} , {data [ [
3 ] ] , {c }}} , h ] , 0} , Pasos ] ] [ [ 2 ] ] ∗ . 1 ,
Animat ionRepet i t ions −> 1 ,
AnimationRunning −> True ] , {Regla , {18 , 30 , 50 , 60 , 90 , 150} ,
ControlType −> Se t t e r } , {Pasos , {20 , 30 ,
40}} , { Instrumento , {”Tuba” , ”Piano ” , ”Guitar ”}} , {{data ,
RandomInteger [{0 , 1} , {3 , 5} ]} ,
ControlType −> None} , {{h , 1 , ”Numero de Matr ices ”} , 1 , 3 , 1 ,
ControlType −> Se t t e r } , De l imi ter ,
Item [ ” Ubicaci on de l o s automatas ” , Alignment −> Center ] ,
Dynamic [ Panel [
Grid [ Take [{{” Lo ca l i z a c i o n cond i c i o n 1” ,
S l i d e r [ Dynamic [ a ] , {−12, 12 , 1} ] ,
Dynamic [ a ]} , {” Lo ca l i z a c i o n cond i c i o n 2” ,
S l i d e r [ Dynamic [ b ] , {−12, 12 , 1} ] ,
Dynamic [ b ]} , {” Lo ca l i z a c i o n cond i c i o n 3” ,
S l i d e r [ Dynamic [ c ] , {−12, 12 , 1} ] , Dynamic [ c ]}} , h ] ] ] ] ,
De l imi ter , Item [ ” Condic iones i n i c i a l e s ” , Alignment −> Center ] ,
Dynamic [ Panel [
Grid [ Outer [ Checkbox [ Dynamic [ data [ [#1 , #2 ] ] ] , {0 , 1} ] &, Range [ h ] ,
Range [ 5 ] ] ] ] ] ,
Dynamic [ EmitSound [
Sound [ SoundNote [
Mod[ DeleteCases [ 3 Range [ Pasos + 1 ] Reverse [#] , 0 ] , 7 1 ] −
34 , . 1 , ToString [ Instrumento ] ] & /@
Transpose [
Cel lularAutomaton [
Regla , {Take [{{ data [ [ 1 ] ] , {a}} , {data [ [ 2 ] ] , {b}} , {data [ [
3 ] ] , {c }}} , h ] , 0} , Pasos ] ] ] ] ] ,
FrameLabel −> {”” , ”” , ”EJEMPLO 2”} ]
A.3. Sonido Automata Celular Lineal 3
Modificacion ejemplo 2 con la opcion de escuchar diferente numero de instrumentos, cada
uno con su condicion inicial independiente, regla de evolucion y separacion de los mismos.

44 A Codigos de programacion para automatas lineales
Completar [ x , i I n t e g e r , j I n t e g e r ] :=
Module [{ z = Dimensions [ x ] [ [ 2 ] ] } ,
Transpose [
Table [ I f [ k <= i | | k > z + i , Table [ 0 , { l , Dimensions [ x ] [ [ 1 ] ] } ] ,
x [ [ Al l , k − i ] ] ] , {k , Dimensions [ x ] [ [ 2 ] ] + i + j } ] ] ]
Suma [ x , y , i I n t e g e r ] :=
Module [{ x0 = Dimensions [ x ] [ [ 2 ] ] , y0 = Dimensions [ y ] [ [ 2 ] ] } ,
I f [ x0 >= y0 , Completar [ x , 0 , i ] + Completar [ y , x0 + i − y0 , 0 ] ,
Completar [ x , y0 + i − x0 , 0 ] + Completar [ y , 0 , i ] ] ]
Manipulate [
Animate [ Module [{ x = {CellularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ,
Suma [ Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ,
3∗CellularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] , b [ [ 1 ] ] ] ,
Suma [5∗ CellularAutomaton [ a [ [ 3 ] ] , {data [ [ 3 ] ] , 0} , n ] ,
Suma [ Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ,
3∗CellularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] , b [ [ 1 ] ] ] ,
b [ [ 2 ] ] ] } } ,
ArrayPlot [
Transpose [
Table [ I f [ i < t + 1 , x [ [ k ] ] [ [ Al l , i ] ] , Table [ 0 , { j , n + 1 } ] ] , { i ,
Dimensions [ x [ [ k ] ] ] [ [ 2 ] ] } ] ] ,
ColorRules −> {1 −> Yellow , 3 −> Blue , 4 −> Green , 5 −> Red ,
6 −> Orange , 8 −> Purple , 9 −> Black } ] ] , {t , 1 ,
Which [ k == 1 ,
Dimensions [ Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ] [ [ 2 ] ] ,
k == 2 , Dimensions [
Suma [ Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ,
3∗CellularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] , b [ [ 1 ] ] ] ] [ [ 2 ] ] ,
k == 3 , Dimensions [
Suma [5∗ CellularAutomaton [ a [ [ 3 ] ] , {data [ [ 3 ] ] , 0} , n ] ,
Suma [ Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ,
3∗CellularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] , b [ [ 1 ] ] ] ,
b [ [ 2 ] ] ] ] [ [ 2 ] ] ] , 1} ,
DefaultDurat ion −>
Which [ k == 1 ,
Dimensions [ Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ] [ [ 2 ] ] ,
k == 2 , Dimensions [
Suma [ Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ,
A.3 Sonido Automata Celular Lineal 3 45
3∗CellularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] , b [ [ 1 ] ] ] ] [ [ 2 ] ] ,
k == 3 ,
Dimensions [
Suma[5∗ CellularAutomaton [ a [ [ 3 ] ] , {data [ [ 3 ] ] , 0} , n ] ,
Suma [ Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ,
3∗CellularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] , b [ [ 1 ] ] ] ,
b [ [ 2 ] ] ] ] [ [ 2 ] ] ] ∗ . 1 , Animat ionRepet i t ions −> 1 ,
AnimationRunning −> True ] , {{n , 20 , ”Numero de Pasos ”} , {20 , 30 ,
40}} , {{k , 2 , ”Numero de Instrumentos ”} , {1 , 2 , 3}} , De l imi ter ,
Item [ ” Reglas de cada automata ” ,
Alignment −> Center ] , {{a , {30 , 30 , 30}} ,
ControlType −> None} , {{b , {10 , 10}} ,
ControlType −> None} , {{data , RandomInteger [{0 , 1} , {3 , 5} ]} ,
ControlType −> None} ,
Dynamic [ Panel [
Grid [ Take [{{” Regla primer automata ” ,
PopupMenu [
Dynamic [ a [ [ 1 ] ] ] , {18 , 30 , 50 , 60 , 90 ,
150} ]} , {”Regla segundo automata ” ,
PopupMenu [
Dynamic [ a [ [ 2 ] ] ] , {18 , 30 , 50 , 60 , 90 ,
150} ]} , {”Regla t e r c e r o automata ” ,
PopupMenu [ Dynamic [ a [ [ 3 ] ] ] , {18 , 30 , 50 , 60 , 90 , 150} ]}} ,
k ] ] ] ] , De l imi ter ,
Item [ ” Movimiento ent r e l o s automatas ” , Alignment −> Center ] ,
Dynamic [ Panel [
Grid [ Take [{{” D i s tanc i a ent r e automatas 1 y 2” ,
S l i d e r [ Dynamic [ b [ [ 1 ] ] ] , {0 , 30 , 5} ] ,
Dynamic [ b [ [ 1 ] ] ] } , {”D i s tanc i a ent r e automatas 2 y 3” ,
S l i d e r [ Dynamic [ b [ [ 2 ] ] ] , {0 , 30 , 5} ] , Dynamic [ b [ [ 2 ] ] ] } } ,
k − 1 ] ] ] ] ,
Dynamic [ Panel [
Grid [ Outer [ Checkbox [ Dynamic [ data [ [#1 , #2 ] ] ] , {0 , 1} ] &, Range [ k ] ,
Range [ 5 ] ] ] ] ] ,
Dynamic [ EmitSound [
Sound [ Take [{ Sound [
SoundNote [
Mod[ DeleteCases [ 3 Range [ n + 1 ] Reverse [#] , 0 ] , 7 1 ] − 34 , . 1 ,
ToString [ ”Tuba ” ] ] & /@
Transpose [
46 A Codigos de programacion para automatas lineales
Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} ,
n ] ] , {Max[{ Dimensions [
Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ] [ [ 2 ] ] ,
Dimensions [ Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] ,
Dimensions [ Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] } ] ∗ . 1 −
Dimensions [ Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ] [ [
2 ] ] ∗ . 1 ,
Max[{ Dimensions [
Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ] [ [ 2 ] ] ,
Dimensions [ Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] , Dimensions [
Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] } ] ∗ . 1 } ] ,
Sound [ SoundNote [
Mod[ DeleteCases [ 3 Range [ n + 1 ] Reverse [#] , 0 ] , 7 1 ] − 34 , . 1 ,
ToString [ ” Guitar ” ] ] & /@
Transpose [
Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} ,
n ] ] , {Max[{ Dimensions [
Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ] [ [ 2 ] ] ,
Dimensions [ Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] , Dimensions [
Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] } ] ∗ . 1 −
Dimensions [ Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] ∗ . 1 + b [ [ 1 ] ] ∗ . 1 ,
Max[{ Dimensions [
Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ] [ [ 2 ] ] ,
Dimensions [ Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] ,
Dimensions [ Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] } ] ∗ . 1 + b [ [ 1 ] ] ∗ . 1 } ] ,
Sound [ SoundNote [
Mod[ DeleteCases [ 3 Range [ n + 1 ] Reverse [#] , 0 ] , 7 1 ] − 34 , . 1 ,
ToString [ ” Piano ” ] ] & /@
Transpose [
Cel lularAutomaton [ a [ [ 3 ] ] , {data [ [ 3 ] ] , 0} ,
n ] ] , {Max[{ Dimensions [
A.3 Sonido Automata Celular Lineal 3 47
Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ] [ [ 2 ] ] ,
Dimensions [ Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] , Dimensions [
Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] } ] ∗ . 1 −
Dimensions [ Cel lularAutomaton [ a [ [ 3 ] ] , {data [ [ 3 ] ] , 0} , n ] ] [ [
2 ] ] ∗ . 1 + b [ [ 1 ] ] ∗ . 1 + b [ [ 2 ] ] ∗ . 1 ,
Max[{ Dimensions [
Cel lularAutomaton [ a [ [ 1 ] ] , {data [ [ 1 ] ] , 0} , n ] ] [ [ 2 ] ] ,
Dimensions [ Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] , Dimensions [
Cel lularAutomaton [ a [ [ 2 ] ] , {data [ [ 2 ] ] , 0} , n ] ] [ [
2 ] ] } ] ∗ . 1 + b [ [ 1 ] ] ∗ . 1 + b [ [ 2 ] ] ∗ . 1 } ] } , k ] ] ] ] ,
FrameLabel −> {”” , ”” , ”EJEMPLO 3”} ]
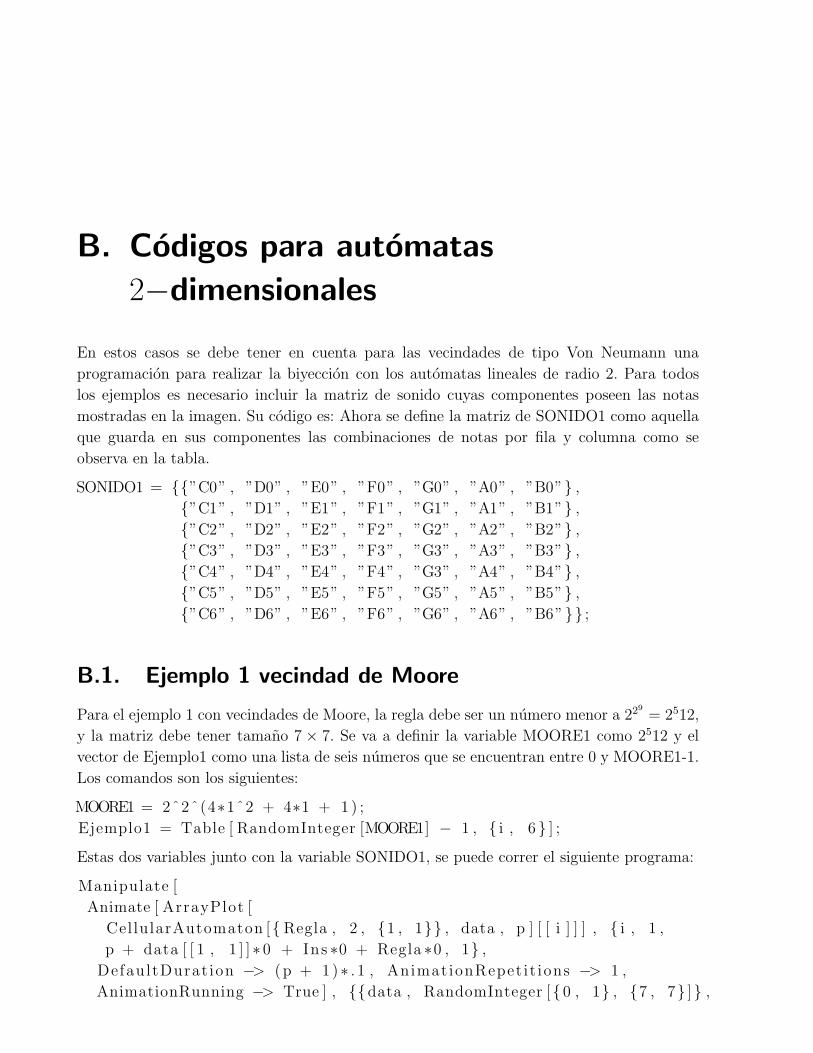
B. Codigos para automatas
2−dimensionales
En estos casos se debe tener en cuenta para las vecindades de tipo Von Neumann una
programacion para realizar la biyeccion con los automatas lineales de radio 2. Para todos
los ejemplos es necesario incluir la matriz de sonido cuyas componentes poseen las notas
mostradas en la imagen. Su codigo es: Ahora se define la matriz de SONIDO1 como aquella
que guarda en sus componentes las combinaciones de notas por fila y columna como se
observa en la tabla.
SONIDO1 = {{”C0” , ”D0” , ”E0” , ”F0” , ”G0” , ”A0” , ”B0”} ,
{”C1” , ”D1” , ”E1” , ”F1” , ”G1” , ”A1” , ”B1”} ,
{”C2” , ”D2” , ”E2” , ”F2” , ”G2” , ”A2” , ”B2”} ,
{”C3” , ”D3” , ”E3” , ”F3” , ”G3” , ”A3” , ”B3”} ,
{”C4” , ”D4” , ”E4” , ”F4” , ”G3” , ”A4” , ”B4”} ,
{”C5” , ”D5” , ”E5” , ”F5” , ”G5” , ”A5” , ”B5”} ,
{”C6” , ”D6” , ”E6” , ”F6” , ”G6” , ”A6” , ”B6”}} ;
B.1. Ejemplo 1 vecindad de Moore
Para el ejemplo 1 con vecindades de Moore, la regla debe ser un numero menor a 229= 2512,
y la matriz debe tener tamano 7 × 7. Se va a definir la variable MOORE1 como 2512 y el
vector de Ejemplo1 como una lista de seis numeros que se encuentran entre 0 y MOORE1-1.
Los comandos son los siguientes:
MOORE1 = 2ˆ2ˆ(4∗1ˆ2 + 4∗1 + 1 ) ;
Ejemplo1 = Table [ RandomInteger [MOORE1] − 1 , { i , 6 } ] ;
Estas dos variables junto con la variable SONIDO1, se puede correr el siguiente programa:
Manipulate [
Animate [ ArrayPlot [
Cel lularAutomaton [{Regla , 2 , {1 , 1}} , data , p ] [ [ i ] ] ] , { i , 1 ,
p + data [ [ 1 , 1 ] ] ∗ 0 + Ins ∗0 + Regla ∗0 , 1} ,
DefaultDurat ion −> (p + 1 )∗ . 1 , Animat ionRepet i t ions −> 1 ,
AnimationRunning −> True ] , {{data , RandomInteger [{0 , 1} , {7 , 7} ]} ,

B.2 Ejemplo 2 vecindad de Moore 49
ControlType −> None} , De l imi ter , {{p , 50 , ”Numero de pasos ”} , {50 ,
60 , 70}} , {{ Ins , 5 , ”Numero de notas a tomar ”} , {5 , 6 , 7 , 8 , 9 ,
10}} , De l imi ter , Item [ ” Regla de evo luc i o n ” , Alignment −> Center ] ,
Item [ ” ” , Alignment −> Center ] , {{Conf , 1 ,
” E l ecc i o n de r eg l a ”} , {1 −> ”Predeterminados ” ,
2 −> ” E s c r i b i r r e g l a ” , 3 −> ” Alea to r i a ”}} ,
{{Regla , Ejemplo1 [ [ 1 ] ] } , ControlType −> None} ,
Dynamic [
Panel [
Which [ Conf == 1 ,
Grid [{{” Regla primer automata ” ,
PopupMenu [
Dynamic [ Regla ] , {Ejemplo1 [ [ 1 ] ] −> ”Ejemplo1 ” ,
Ejemplo1 [ [ 2 ] ] −> ”Ejemplo2 ” , Ejemplo1 [ [ 3 ] ] −> ”Ejemplo3 ” ,
Ejemplo1 [ [ 4 ] ] −> ”Ejemplo4 ” , Ejemplo1 [ [ 5 ] ] −> ”Ejemplo5 ” ,
Ejemplo1 [ [ 6 ] ] −> ”Ejemplo6 ”} ]}} ] , Conf == 2 ,
Grid [{{” Regla de l automata ” , InputF ie ld [ Dynamic [ Regla ] ] } } ] ,
Conf == 3 ,
Grid [{{” Regla primer automata ” ,
Dynamic [ Regla =
RandomInteger [2ˆ2ˆ(4∗1ˆ2 + 4∗1 + 1) − 1 ] ] } } ] ] ] ] , De l imi ter ,
Item [ ” Condici on I n i c i a l ” , Alignment −> Center ] ,
Dynamic [ Panel [
Grid [ Outer [ Checkbox [ Dynamic [ data [ [#1 , #2 ] ] ] , {0 , 1} ] &, Range [ 7 ] ,
Range [ 7 ] ] ] ] ] ,
Dynamic [ EmitSound [
Sound [ Table [
Sound [ RandomSample [
F la t ten [ Table [
SoundNote [SONIDO1 [ [ i , j ] ] , {(m − 1 )∗0 . 1 , m∗0 .1} ,
SoundVolume −>
CellularAutomaton [{ Regla , 2 , {1 , 1}} , data , p ] [ [m ] ] [ [ i ,
j ] ] ] , { i , 7} , { j , 7 } ] ] , Ins ] , {(m − 1 )∗ . 1 , m∗ . 1 } ] , {m, 1 ,
p , 1 } ] ] ] ] , FrameLabel −> {”” , ”” , ”EJEMPLO 1”} ]
B.2. Ejemplo 2 vecindad de Moore
Para el ejemplo 2 con vecindades de Moore, la regla debe ser un numero menor a 449, y
la matriz debe tener tamano 7 × 7. Para esto se definen como el ejemplo 1 las variables

50 B Codigos para automatas 2−dimensionales
MOORE2 como 449y Ejemplo 3 como una lista de numeros entre 0 y MOORE2-1.
MOORE2 = 4ˆ4ˆ(4∗1ˆ2 + 4∗1 + 1 ) ;
Ejemplo3 =Table [ RandomInteger [MOORE2] − 1 , { i , 6 } ] ;
Al igual que en el ejemplo 1, se debe incluir la matriz SONIDO1 para que el siguiente
programa funcione.
Manipulate [
Animate [ ArrayPlot [
Cel lularAutomaton [{Regla , 4 , {1 , 1}} , data , p ] [ [ i ] ] ,
ColorRules −> {0 −> White , 1 −> Yellow , 2 −> Blue , 3 −> Red} ] , { i ,
1 , p + data [ [ 1 , 1 ] ] ∗ 0 + Ins ∗0 + Regla ∗0 , 1} ,
DefaultDurat ion −> (p + 1 )∗ . 1 , Animat ionRepet i t ions −> 1 ,
AnimationRunning −> True ] , {{data , RandomInteger [{0 , 3} , {7 , 7} ]} ,
ControlType −> None} , De l imi ter , {{p , 50 , ”Numero de pasos ”} , {50 ,
60 , 70}} , {{ Ins , 5 , ”Numero de notas a tomar ”} , {5 , 6 , 7 , 8 , 9 ,
10}} , De l imi ter , Item [ ” Regla de evo luc i o n ” , Alignment −> Center ] ,
Item [ ” ” , Alignment −> Center ] , De l imi ter , {{Conf , 1 ,
” E l ecc i o n de r eg l a ”} , {1 −> ”Predeterminados ” ,
2 −> ” E s c r i b i r r e g l a ” , 3 −> ” Alea to r i a ”}} ,
{{Regla , Ejemplo3 [ [ 1 ] ] } , ControlType −> None} ,
Dynamic [
Panel [
Which [ Conf == 1 ,
Grid [{{” Regla primer automata ” ,
PopupMenu [
Dynamic [ Regla ] , {Ejemplo3 [ [ 1 ] ] −> ”Ejemplo1 ” ,
Ejemplo3 [ [ 2 ] ] −> ”Ejemplo2 ” , Ejemplo3 [ [ 3 ] ] −> ”Ejemplo3 ” ,
Ejemplo3 [ [ 4 ] ] −> ”Ejemplo4 ” , Ejemplo3 [ [ 5 ] ] −> ”Ejemplo5 ” ,
Ejemplo3 [ [ 6 ] ] −> ”Ejemplo6 ”} ]}} ] , Conf = 2 ,
Grid [{{” Regla primer automata ” , InputF ie ld [ Dynamic [ Regla ] ] } } ]
, Conf == 3 ,
Grid [{{” Regla primer automata ” ,
Dynamic [ Regla = RandomInteger [MOORE2 − 1 ] ] } } ] ] ] ] , De l imi ter ,
Item [ ” Condici on I n i c i a l ” , Alignment −> Center ] ,
Dynamic [ Panel [
Grid [ Outer [ Checkbox [ Dynamic [ data [ [#1 , #2 ] ] ] , {0 , 1} ] &, Range [ 7 ] ,
Range [ 7 ] ] ] ] ] ,
Dynamic [ EmitSound [
Sound [ Table [
Sound [ RandomSample [

B.3 Ejemplo 1 Vecindad de Neumann 51
Flat ten [ Table [
SoundNote [SONIDO1 [ [ i , j ] ] , {(m − 1 )∗0 . 1 , m∗0 .1} ,
SoundVolume −>
CellularAutomaton [{ Regla , 4 , {1 , 1}} , data , p ] [ [m ] ] [ [ i ,
j ] ] ] , { i , 7} , { j , 7 } ] ] , Ins ] , {(m − 1 )∗ . 1 , m∗ . 1 } ] , {m, 1 ,
p , 1 } ] ] ] ] , FrameLabel −> {”” , ”” , ”EJEMPLO 3”} ]
B.3. Ejemplo 1 Vecindad de Neumann
El programa principal necesita de las siguientes funciones que realizan la biyeccion de las
vecindades de Von Neumann con los automatas lineales con radio 2
REGLA1N1[Q , i I n t e g e r , j I n t e g e r , Regla ] :=
CellularAutomaton [{Regla , 2 , 2} , {Q[ [ i , j − 1 ] ] , Q [ [ i − 1 , j ] ] ,
Q [ [ i , j ] ] , Q [ [ i + 1 , j ] ] , Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ;
REGLA2N1[Q , i I n t e g e r , j I n t e g e r , p Integer , q In t ege r , Regla ] :=
Which [ i == 1 && j == 1 ,
Cel lularAutomaton [{Regla , 2 , 2} , {0 , 0 , Q[ [ i , j ] ] , Q [ [ i + 1 , j ] ] ,
Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
i == 1 && 1 < j < q ,
Cel lularAutomaton [{Regla , 2 , 2} , {Q[ [ i , j − 1 ] ] , 0 , Q[ [ i , j ] ] ,
Q [ [ i + 1 , j ] ] , Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
i == 1 && j == q ,
Cel lularAutomaton [{Regla , 2 , 2} , {Q[ [ i , j − 1 ] ] , 0 , Q[ [ i , j ] ] ,
Q [ [ i + 1 , j ] ] , 0} , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
1 < i < p && j == 1 ,
Cel lularAutomaton [{Regla , 2 , 2} , {0 , Q[ [ i − 1 , j ] ] , Q [ [ i , j ] ] ,
Q [ [ i + 1 , j ] ] , Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
1 < i < p && j == q ,
Cel lularAutomaton [{Regla , 2 , 2} , {Q[ [ i , j − 1 ] ] , Q [ [ i − 1 , j ] ] ,
Q [ [ i , j ] ] , Q [ [ i + 1 , j ] ] , 0} , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
i == p && j == 1 ,
Cel lularAutomaton [{Regla , 2 , 2} , {0 , Q[ [ i − 1 , j ] ] , Q [ [ i , j ] ] , 0 ,
Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
i == p && 1 < j < q ,
Cel lularAutomaton [{Regla , 2 , 2} , {Q[ [ i , j − 1 ] ] , Q [ [ i − 1 , j ] ] ,
Q [ [ i , j ] ] , 0 , Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
i == p && j == q ,
Cel lularAutomaton [{Regla , 2 , 2} , {Q[ [ i , j − 1 ] ] , Q [ [ i − 1 , j ] ] ,
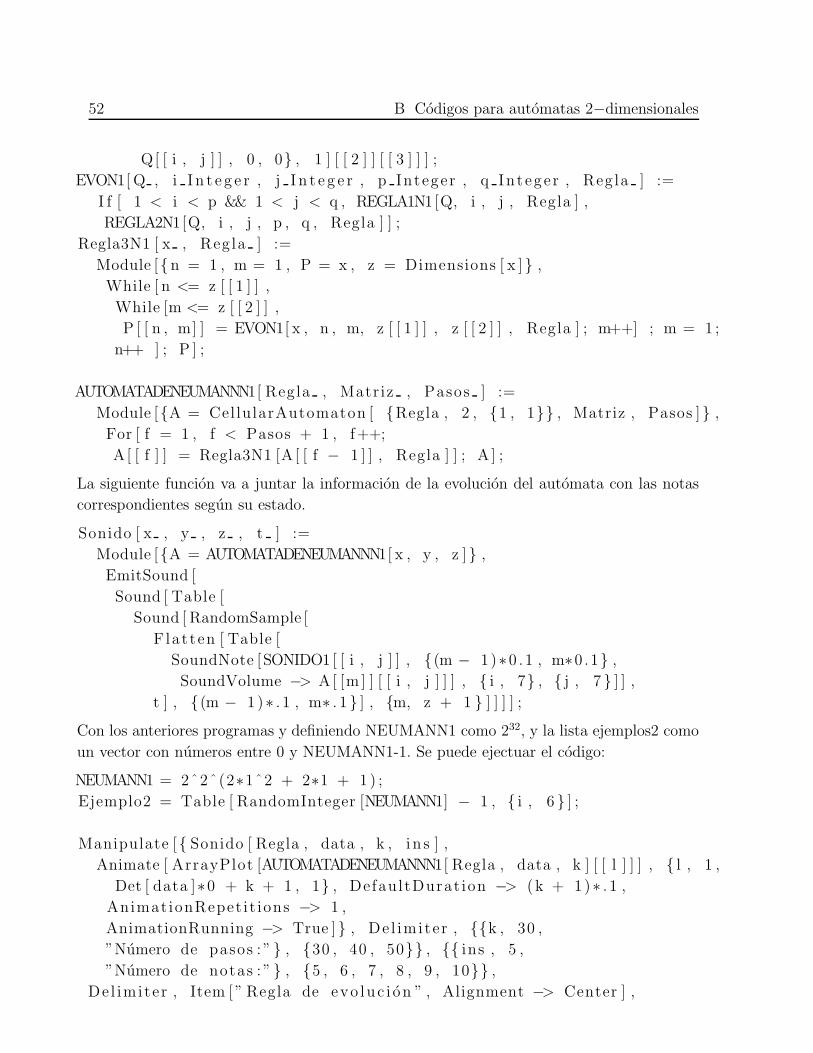
52 B Codigos para automatas 2−dimensionales
Q[ [ i , j ] ] , 0 , 0} , 1 ] [ [ 2 ] ] [ [ 3 ] ] ] ;
EVON1[ Q , i I n t e g e r , j I n t e g e r , p Integer , q In t ege r , Regla ] :=
I f [ 1 < i < p && 1 < j < q , REGLA1N1[Q, i , j , Regla ] ,
REGLA2N1[Q, i , j , p , q , Regla ] ] ;
Regla3N1 [ x , Regla ] :=
Module [{n = 1 , m = 1 , P = x , z = Dimensions [ x ]} ,
While [ n <= z [ [ 1 ] ] ,
While [m <= z [ [ 2 ] ] ,
P [ [ n , m] ] = EVON1[ x , n , m, z [ [ 1 ] ] , z [ [ 2 ] ] , Regla ] ; m++] ; m = 1 ;
n++ ] ; P ] ;
AUTOMATADENEUMANNN1[ Regla , Matriz , Pasos ] :=
Module [{A = CellularAutomaton [ {Regla , 2 , {1 , 1}} , Matriz , Pasos ]} ,
For [ f = 1 , f < Pasos + 1 , f++;
A[ [ f ] ] = Regla3N1 [A [ [ f − 1 ] ] , Regla ] ] ; A ] ;
La siguiente funcion va a juntar la informacion de la evolucion del automata con las notas
correspondientes segun su estado.
Sonido [ x , y , z , t ] :=
Module [{A = AUTOMATADENEUMANNN1[ x , y , z ]} ,
EmitSound [
Sound [ Table [
Sound [ RandomSample [
F la t ten [ Table [
SoundNote [SONIDO1 [ [ i , j ] ] , {(m − 1 )∗0 . 1 , m∗0 .1} ,
SoundVolume −> A[ [m ] ] [ [ i , j ] ] ] , { i , 7} , { j , 7 } ] ] ,
t ] , {(m − 1 )∗ . 1 , m∗ . 1 } ] , {m, z + 1 } ] ] ] ] ;
Con los anteriores programas y definiendo NEUMANN1 como 232, y la lista ejemplos2 como
un vector con numeros entre 0 y NEUMANN1-1. Se puede ejectuar el codigo:
NEUMANN1 = 2ˆ2ˆ(2∗1ˆ2 + 2∗1 + 1 ) ;
Ejemplo2 = Table [ RandomInteger [NEUMANN1] − 1 , { i , 6 } ] ;
Manipulate [{ Sonido [ Regla , data , k , i n s ] ,
Animate [ ArrayPlot [AUTOMATADENEUMANNN1[ Regla , data , k ] [ [ l ] ] ] , { l , 1 ,
Det [ data ]∗0 + k + 1 , 1} , DefaultDurat ion −> (k + 1 )∗ . 1 ,
Animat ionRepet i t ions −> 1 ,
AnimationRunning −> True ]} , De l imi ter , {{k , 30 ,
”Numero de pasos : ”} , {30 , 40 , 50}} , {{ ins , 5 ,
”Numero de notas : ”} , {5 , 6 , 7 , 8 , 9 , 10}} ,
De l imi ter , Item [ ” Regla de evo luc i o n ” , Alignment −> Center ] ,

B.4 Ejemplo 2 Vecindad de Neumann 53
Item [ ” ” , Alignment −> Center ] , {{data ,
RandomInteger [{0 , 1} , {7 , 7} ]} , ControlType −> None} ,
{{Conf , 1 , ” E l ecc i o n de r eg l a ”} , {1 −> ”Predeterminados ” ,
2 −> ” Exc r i b i r r e g l a ” , 3 −> ” Alea to r i a ”}} , {{Regla , Ejemplo2 [ [ 1 ] ] } ,
ControlType −> None} ,
Dynamic [
Panel [
Which [ Conf == 1 ,
Grid [{{” Regla primer automata ” ,
PopupMenu [
Dynamic [ Regla ] , {Ejemplo2 [ [ 1 ] ] −> ”Ejemplo1 ” ,
Ejemplo2 [ [ 2 ] ] −> ”Ejemplo2 ” , Ejemplo2 [ [ 3 ] ] −> ”Ejemplo3 ” ,
Ejemplo2 [ [ 4 ] ] −> ”Ejemplo4 ” , Ejemplo2 [ [ 5 ] ] −> ”Ejemplo5 ” ,
Ejemplo2 [ [ 6 ] ] −> ”Ejemplo6 ”} ]}} ] , Conf == 2 ,
Grid [{{” Regla de l automata ” , InputF ie ld [ Dynamic [ Regla ] ] } } ] ,
Conf == 3 ,
Grid [{{” Regla de l automata ” ,
Dynamic [ Regla = RandomInteger [NEUMANN1 − 1 ] ] } } ] ] ] ] , De l imi ter ,
Item [ ” Condici on I n i c i a l ” , Alignment −> Center ] ,
Dynamic [ Panel [
Grid [ Outer [ Checkbox [ Dynamic [ data [ [#1 , #2 ] ] ] , {0 , 1} ] &, Range [ 7 ] ,
Range [ 7 ] ] ] ] ] , FrameLabel −> {”” , ”” , ”Ejemplo 2”} ]
B.4. Ejemplo 2 Vecindad de Neumann
Al igual que en el ejemplo 1 se necesita una serie de programas que difiere del anterior en el
numero de estados, el resto de valores son iguales. Asi que se define NEUMANN2 como 445
y Ejemplos4 como una lista de valores entre 0 y NEUMANN2-1.
NEUMANN2 = 4ˆ4ˆ(2∗2 + 1 ) ;
Ejemplo4 = Table [ RandomInteger [NEUMANN2] − 1 , { i , 6 } ] ;
REGLA1N2[Q , i I n t e g e r , j I n t e g e r , Regla ] :=
CellularAutomaton [{Regla , 4 , 2} , {Q[ [ i , j − 1 ] ] , Q [ [ i − 1 , j ] ] ,
Q [ [ i , j ] ] , Q [ [ i + 1 , j ] ] , Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ;
REGLA2N2[Q , i I n t e g e r , j I n t e g e r , p Integer , q In t ege r , Regla ] :=
Which [ i == 1 && j == 1 ,
Cel lularAutomaton [{Regla , 4 , 2} , {0 , 0 , Q[ [ i , j ] ] , Q [ [ i + 1 , j ] ] ,
Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
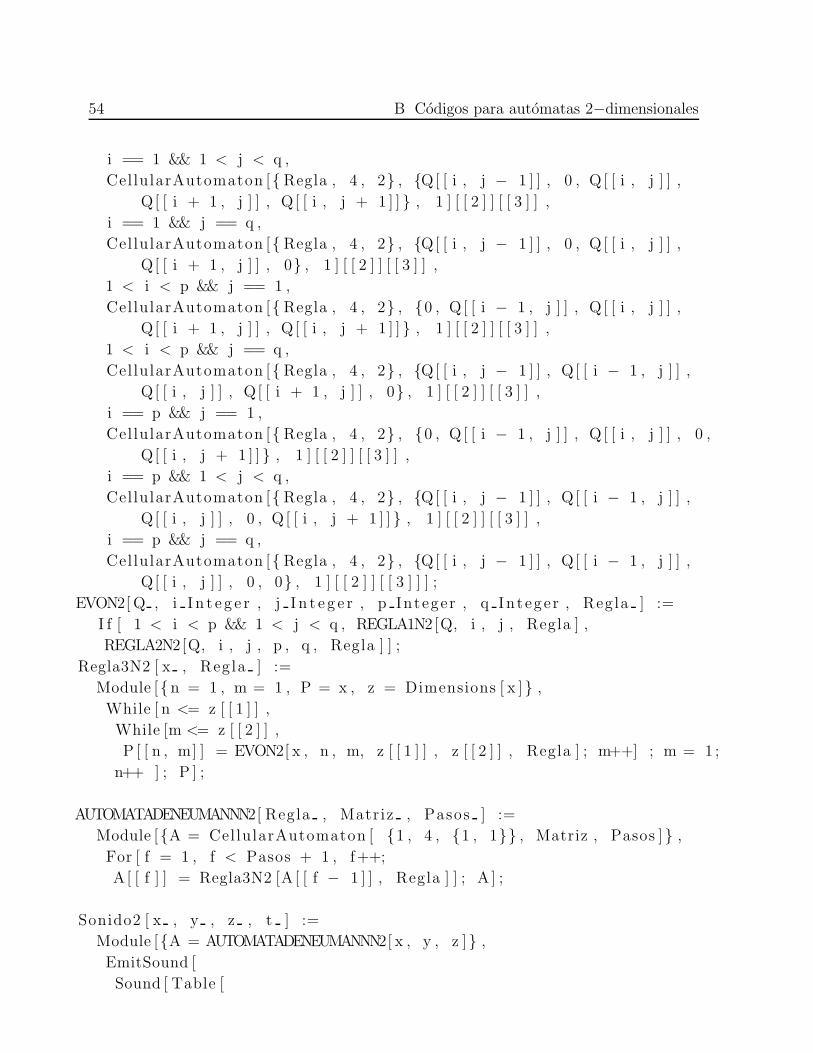
54 B Codigos para automatas 2−dimensionales
i == 1 && 1 < j < q ,
Cel lularAutomaton [{Regla , 4 , 2} , {Q[ [ i , j − 1 ] ] , 0 , Q [ [ i , j ] ] ,
Q [ [ i + 1 , j ] ] , Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
i == 1 && j == q ,
Cel lularAutomaton [{Regla , 4 , 2} , {Q[ [ i , j − 1 ] ] , 0 , Q [ [ i , j ] ] ,
Q [ [ i + 1 , j ] ] , 0} , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
1 < i < p && j == 1 ,
Cel lularAutomaton [{Regla , 4 , 2} , {0 , Q [ [ i − 1 , j ] ] , Q [ [ i , j ] ] ,
Q [ [ i + 1 , j ] ] , Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
1 < i < p && j == q ,
Cel lularAutomaton [{Regla , 4 , 2} , {Q[ [ i , j − 1 ] ] , Q [ [ i − 1 , j ] ] ,
Q [ [ i , j ] ] , Q [ [ i + 1 , j ] ] , 0} , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
i == p && j == 1 ,
Cel lularAutomaton [{Regla , 4 , 2} , {0 , Q [ [ i − 1 , j ] ] , Q [ [ i , j ] ] , 0 ,
Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
i == p && 1 < j < q ,
Cel lularAutomaton [{Regla , 4 , 2} , {Q[ [ i , j − 1 ] ] , Q [ [ i − 1 , j ] ] ,
Q [ [ i , j ] ] , 0 , Q [ [ i , j + 1 ] ] } , 1 ] [ [ 2 ] ] [ [ 3 ] ] ,
i == p && j == q ,
Cel lularAutomaton [{Regla , 4 , 2} , {Q[ [ i , j − 1 ] ] , Q [ [ i − 1 , j ] ] ,
Q [ [ i , j ] ] , 0 , 0} , 1 ] [ [ 2 ] ] [ [ 3 ] ] ] ;
EVON2[ Q , i I n t e g e r , j I n t e g e r , p Integer , q In t ege r , Regla ] :=
I f [ 1 < i < p && 1 < j < q , REGLA1N2[Q, i , j , Regla ] ,
REGLA2N2[Q, i , j , p , q , Regla ] ] ;
Regla3N2 [ x , Regla ] :=
Module [{n = 1 , m = 1 , P = x , z = Dimensions [ x ]} ,
While [ n <= z [ [ 1 ] ] ,
While [m <= z [ [ 2 ] ] ,
P [ [ n , m] ] = EVON2[ x , n , m, z [ [ 1 ] ] , z [ [ 2 ] ] , Regla ] ; m++] ; m = 1 ;
n++ ] ; P ] ;
AUTOMATADENEUMANNN2[ Regla , Matriz , Pasos ] :=
Module [{A = CellularAutomaton [ {1 , 4 , {1 , 1}} , Matriz , Pasos ]} ,
For [ f = 1 , f < Pasos + 1 , f++;
A[ [ f ] ] = Regla3N2 [A [ [ f − 1 ] ] , Regla ] ] ; A ] ;
Sonido2 [ x , y , z , t ] :=
Module [{A = AUTOMATADENEUMANNN2[ x , y , z ]} ,
EmitSound [
Sound [ Table [

B.4 Ejemplo 2 Vecindad de Neumann 55
Sound [ RandomSample [
F la t ten [ Table [
SoundNote [SONIDO1 [ [ i , j ] ] , {(m − 1 )∗0 . 1 , m∗0 .1} ,
SoundVolume −> A[ [m ] ] [ [ i , j ] ] ] , { i , 7} , { j , 7 } ] ] ,
t ] , {(m − 1 )∗ . 1 , m∗ . 1 } ] , {m, z + 1 } ] ] ] ] ;

C. Reglas Semitotalısticas
Para las reglas semitotalısticas a trabajar se deben siempre incluir en el encabezado los
siguientes codigos que son los encargados de tomar para cada elemento de ella, los perte-
necientes a la vecindad de Moore y realizar la suma de estados para corroborar si mueren,
nacen o sobreviven cada una de las celulas.
REGLATIPO1[Q , i I n t e g e r , j I n t e g e r ] :=
Sum[Q[ [ i + n , j + k ] ] , {n , −1, 1} , {k , −1, 1} ] − Q[ [ i , j ] ] ;
REGLATIPO2[Q , i I n t e g e r , j I n t e g e r , p Integer , q In t eg e r ] :=
Which [ i == 1 && j == 1 ,
Sum[Q[ [ i + n , j + k ] ] , {n , 0 , 1} , {k , 0 , 1} ] − Q[ [ i , j ] ] ,
i == 1 && 1 < j < q ,
Sum[Q[ [ i + n , j + k ] ] , {n , 0 , 1} , {k , −1, 1} ] − Q[ [ i , j ] ] ,
i == 1 && j == q ,
Sum[Q[ [ i + n , j + k ] ] , {n , 0 , 1} , {k , −1, 0} ] − Q[ [ i , j ] ] ,
1 < i < p && j == 1 ,
Sum[Q[ [ i + n , j + k ] ] , {n , −1, 1} , {k , 0 , 1} ] − Q[ [ i , j ] ] ,
1 < i < p && j == q ,
Sum[Q[ [ i + n , j + k ] ] , {n , −1, 1} , {k , −1, 0} ] − Q[ [ i , j ] ] ,
i == p && j == 1 ,
Sum[Q[ [ i + n , j + k ] ] , {n , −1, 0} , {k , 0 , 1} ] − Q[ [ i , j ] ] ,
i == p && 1 < j < q ,
Sum[Q[ [ i + n , j + k ] ] , {n , −1, 0} , {k , −1, 1} ] − Q[ [ i , j ] ] ,
i == p && j == q ,
Sum[Q[ [ i + n , j + k ] ] , {n , −1, 0} , {k , −1, 0} ] − Q[ [ i , j ] ] ] ;
Evol [ Q , i I n t e g e r , j I n t e g e r , p Integer , q In t eg e r ] :=
I f [ 1 < i < p && 1 < j < q , REGLATIPO1[Q, i , j ] ,
REGLATIPO2[Q, i , j , p , q ] ] ;
Las siguientes funciones van a tomar la sucesion de matrices correspondientes a la evolucion
del automata y generaran el sonido para cada decima de segundo.
R1 [ x , p Integer , q In t eg e r ] :=
Module [{n = 1 , m = 1 , P = x} ,
While [ n <= p , While [m <= q , P [ [ n , m] ] = Evol [ x , n , m, p , q ] ; m++] ;
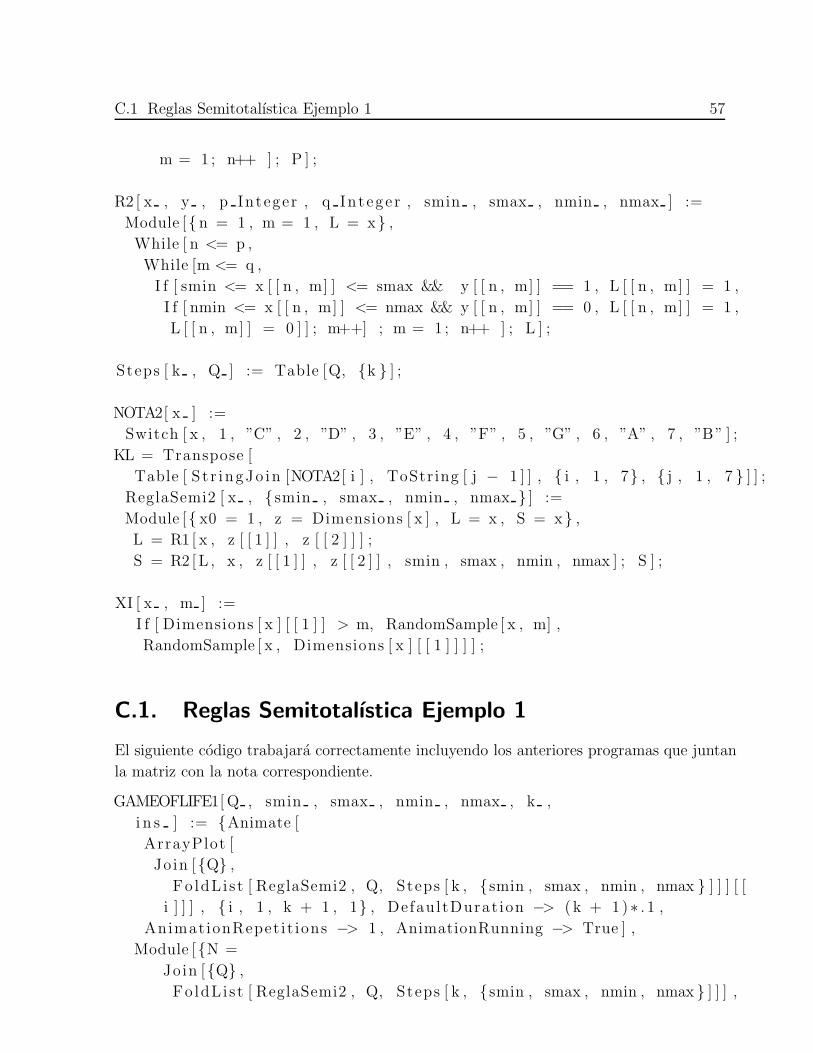
C.1 Reglas Semitotalıstica Ejemplo 1 57
m = 1 ; n++ ] ; P ] ;
R2 [ x , y , p Integer , q In t ege r , smin , smax , nmin , nmax ] :=
Module [{n = 1 , m = 1 , L = x} ,
While [ n <= p ,
While [m <= q ,
I f [ smin <= x [ [ n , m] ] <= smax && y [ [ n , m] ] == 1 , L [ [ n , m] ] = 1 ,
I f [ nmin <= x [ [ n , m] ] <= nmax && y [ [ n , m] ] == 0 , L [ [ n , m] ] = 1 ,
L [ [ n , m] ] = 0 ] ] ; m++] ; m = 1 ; n++ ] ; L ] ;
Steps [ k , Q ] := Table [Q, {k } ] ;
NOTA2[ x ] :=
Switch [ x , 1 , ”C” , 2 , ”D” , 3 , ”E” , 4 , ”F” , 5 , ”G” , 6 , ”A” , 7 , ”B” ] ;
KL = Transpose [
Table [ S t r ingJo in [NOTA2[ i ] , ToString [ j − 1 ] ] , { i , 1 , 7} , { j , 1 , 7 } ] ] ;
ReglaSemi2 [ x , { smin , smax , nmin , nmax } ] :=
Module [{ x0 = 1 , z = Dimensions [ x ] , L = x , S = x} ,
L = R1 [ x , z [ [ 1 ] ] , z [ [ 2 ] ] ] ;
S = R2 [L , x , z [ [ 1 ] ] , z [ [ 2 ] ] , smin , smax , nmin , nmax ] ; S ] ;
XI [ x , m ] :=
I f [ Dimensions [ x ] [ [ 1 ] ] > m, RandomSample [ x , m] ,
RandomSample [ x , Dimensions [ x ] [ [ 1 ] ] ] ] ;
C.1. Reglas Semitotalıstica Ejemplo 1
El siguiente codigo trabajara correctamente incluyendo los anteriores programas que juntan
la matriz con la nota correspondiente.
GAMEOFLIFE1[Q , smin , smax , nmin , nmax , k ,
i n s ] := {Animate [
ArrayPlot [
Jo in [{Q} ,
Fo ldL i st [ ReglaSemi2 , Q, Steps [ k , {smin , smax , nmin , nmax } ] ] ] [ [
i ] ] ] , { i , 1 , k + 1 , 1} , DefaultDurat ion −> ( k + 1 )∗ . 1 ,
Animat ionRepet i t ions −> 1 , AnimationRunning −> True ] ,
Module [{N =
Join [{Q} ,
Fo ldL i st [ ReglaSemi2 , Q, Steps [ k , {smin , smax , nmin , nmax } ] ] ] ,

58 C Reglas Semitotalısticas
L = Range [ k ]} ,
L = Table [
Table [{N[ [ l ] ] [ [ i , j ] ] , KL [ [ i , j ] ] } , { i , 1 , 7} , { j , 1 , 7} ] , { l , 1 ,
k } ] ; EmitSound [
Sound [ Table [
SoundNote [
XI [ F la t ten [
Table [ DeleteCases [ F la t ten [ Cases [L [ [ l , i ] ] , {1 , } ] ] , 1 ] , { i ,
1 , 7 } ] ] , i n s ] , . 1 ] , { l , 1 , k } ] ] ] ] }
Manipulate [
GAMEOFLIFE1[ data , Regla [ [ 1 ] ] , Regla [ [ 2 ] ] , Regla [ [ 3 ] ] , Regla [ [ 4 ] ] , p ,
Ins ] , {{data , RandomInteger [{0 , 1} , {7 , 7} ]} ,
ControlType −> None} , De l imi ter , {{p , 50 , ”Numero de pasos ”} , {50 ,
60 , 70}} , {{ Ins , 3 , ”Numero de notas a tomar ”} , {3 , 4 , 5 , 6 , 7 , 8 ,
9 , 10}} , De l imi ter ,
Item [ ” Regla de evo luc i o n ” , Alignment −> Center ] ,
Item [ ” ” , Alignment −> Center ] , {{Conf , 1 ,
” E l ecc i o n r e g l a s em i t o t a l ı s t i c a ”} , {1 −> ”Game o f L i f e ” ,
2 −> ”HighLi f e ” , 3 −> ” Persona l i zada ”}} , {{Regla , {2 , 2 , 2 , 3}} ,
ControlType −> None} ,
Dynamic [
Panel [
Which [ Conf == 1 , Regla = {2 , 3 , 3 , 3} ,
Conf == 2 , Regla = {2 , 3 , 3 , 6} ,
Conf == 3 ,
Grid [{{” Sobrev iv i en t e Mınimo ” ,
PopupMenu [
Regla [ [ 1 ] ] , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 ,
9} ]} , {” Sobrev iv i en t e Maximo” ,
PopupMenu [ Regla [ [ 2 ] ] , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9} ]} ,
{”Nacimiento Mınimo ” ,
PopupMenu [ Regla [ [ 3 ] ] , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9} ]} ,
{”Nacimiento Maximo” ,
PopupMenu [ Regla [ [ 4 ] ] , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9} ]}} ]
]
]
] ,
De l imi ter , Item [ ” Condici on I n i c i a l ” , Alignment −> Center ] ,
Dynamic [ Panel [
C.2 Reglas Semitotalısticas Ejemplo 2 59
Grid [ Outer [ Checkbox [ Dynamic [ data [ [#1 , #2 ] ] ] , {0 , 1} ] &, Range [ 7 ] ,
Range [ 7 ] ] ] ] ] , FrameLabel −> {”” , ”” , ”EJEMPLO 1”} ]
C.2. Reglas Semitotalısticas Ejemplo 2
El siguiente ejemplo conserva la misma idea que el ejemplo 1 con la salvedad que se van
eligiendo simultaneamente instrumentos al azar para generar cada nota. El codigo se muestra
a continuacion.
GAMEOFLIFE2[Q , smin , smax , nmin , nmax , k ,
i n s ] := {Animate [
ArrayPlot [
Jo in [{Q} ,
Fo ldL i st [ ReglaSemi2 , Q, Steps [ k , {smin , smax , nmin , nmax } ] ] ] [ [
i ] ] ] , { i , 1 , k + 1 , 1} , DefaultDurat ion −> ( k + 1 )∗ . 1 ,
Animat ionRepet i t ions −> 1 , AnimationRunning −> True ] ,
Module [{N =
Join [{Q} ,
Fo ldL i st [ ReglaSemi2 , Q, Steps [ k , {smin , smax , nmin , nmax } ] ] ] ,
L = Range [ k ]} ,
L = Table [
Table [{N[ [ l ] ] [ [ i , j ] ] , KL [ [ i , j ] ] } , { i , 1 , 7} , { j , 1 , 7} ] , { l , 1 ,
k } ] ; EmitSound [
Sound [ Table [
SoundNote [
XI [ F la t ten [
Table [ DeleteCases [ F la t ten [ Cases [ L [ [ l , i ] ] , {1 , } ] ] , 1 ] , { i ,
1 , 7 } ] ] , i n s ] , . 1 ,
ToString [ RandomChoice [{” Bass ” , ”Harp” , ”Guitar ” } ] ] ] , { l , 1 ,
k } ] ] ] ] }
Manipulate [
GAMEOFLIFE2[ data , Regla [ [ 1 ] ] , Regla [ [ 2 ] ] , Regla [ [ 3 ] ] , Regla [ [ 4 ] ] , p ,
Ins ] , {{data , RandomInteger [{0 , 1} , {7 , 7} ]} ,
ControlType −> None} , De l imi ter , {{p , 50 , ”Numero de pasos ”} , {50 ,
60 , 70}} , {{ Ins , 3 , ”Numero de notas a tomar ”} , {3 , 4 , 5 , 6 , 7 , 8 ,
9 , 10}} , De l imi ter ,
Item [ ” Regla de evo luc i o n ” , Alignment −> Center ] ,
Item [ ” ” , Alignment −> Center ] ,
{{Conf , 1 , ” E l ecc i o n r e g l a s em i t o t a l ı s t i c a ”} , {1 −> ”Game o f L i f e ” ,

60 C Reglas Semitotalısticas
2 −> ”HighLi f e ” , 3 −> ” Persona l i zada ”}} , {{Regla , {2 , 2 , 2 , 3}} ,
ControlType −> None} ,
Dynamic [
Panel [
Which [ Conf == 1 , Regla = {2 , 3 , 3 , 3} ,
Conf == 2 , Regla = {2 , 3 , 3 , 6} ,
Conf == 3 ,
Grid [{{” Sobrev iv i en t e Mınimo ” ,
PopupMenu [
Regla [ [ 1 ] ] , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 ,
9} ]} , {” Sobrev iv i en t e Maximo” ,
PopupMenu [ Regla [ [ 2 ] ] , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9} ]} ,
{”Nacimiento Mınimo ” ,
PopupMenu [ Regla [ [ 3 ] ] , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9} ]} ,
{”Nacimiento Maximo” ,
PopupMenu [ Regla [ [ 4 ] ] , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9} ]}} ]
]
]
] ,
De l imi ter , Item [ ” Condici on I n i c i a l ” , Alignment −> Center ] ,
Dynamic [ Panel [
Grid [ Outer [ Checkbox [ Dynamic [ data [ [#1 , #2 ] ] ] , {0 , 1} ] &, Range [ 7 ] ,
Range [ 7 ] ] ] ] ] , FrameLabel −> {”” , ”” , ”EJEMPLO 2”} ]
C.3. Reglas Semitotalısticas ejemplo 3
El siguiente codigo fracciona la matriz de 21× 21 en 9 matrices de 7× 7 donde cada una de
ellas representa un instrumento musical especıfico.
NOTA3[ x ] :=
Switch [ x , 1 , ”Guitar ” , 2 , ”Piano ” , 3 , ”AltoSax ” , 4 , ”Harp” , 5 ,
”Guitar ” , 6 , ”TenorSax” , 7 , ”Tuba” , 8 , ” Flute ” , 9 , ” S i t a r ” ] ;
GAMEOFLIFE3[ Q , smin , smax , nmin , nmax ,
k ] := {Animate [
ArrayPlot [
Jo in [{Q} ,
Fo ldL i st [ ReglaSemi2 , Q, Steps [ k , {smin , smax , nmin , nmax } ] ] ] [ [
u ] ] ] , {u , 1 , k , 1} , DefaultDurat ion −> ( k + 1 )∗ . 1 ,

C.3 Reglas Semitotalısticas ejemplo 3 61
Animat ionRepet i t ions −> 1 ,
AnimationRunning −> True ] Module [{B = Q,
L = RandomChoice [{0 , 1} , {k + 1 , 9} ] , S = Range [ k ]} ,
B = Join [{Q} ,
Fo ldL i st [ ReglaSemi2 , Q, Steps [ k , {smin , smax , nmin , nmax } ] ] ] ;
For [m = 0 , m < k + 1 , m++;
L [ [m, 1 ] ] = Table [ Table [B [ [m ] ] [ [ i , j ] ] , { j , 1 , 7} ] , { i , 8 , 1 4 } ] ;
L [ [m, 2 ] ] = Table [ Table [B [ [m ] ] [ [ i , j ] ] , { j , 8 , 14} ] , { i , 1 , 7 } ] ;
L [ [m, 3 ] ] = Table [ Table [B [ [m ] ] [ [ i , j ] ] , { j , 15 , 21} ] , { i , 1 , 7 } ] ;
L [ [m, 4 ] ] = Table [ Table [B [ [m ] ] [ [ i , j ] ] , { j , 1 , 7} ] , { i , 8 , 1 4 } ] ;
L [ [m, 5 ] ] =
Table [ Table [B [ [m ] ] [ [ i , j ] ] , { j , 8 , 14} ] , { i , 8 , 1 4 } ] ;
L [ [m, 6 ] ] =
Table [ Table [B [ [m ] ] [ [ i , j ] ] , { j , 15 , 21} ] , { i , 8 , 1 4 } ] ;
L [ [m, 7 ] ] = Table [ Table [B [ [m ] ] [ [ i , j ] ] , { j , 1 , 7} ] , { i , 15 , 2 1 } ] ;
L [ [m, 8 ] ] =
Table [ Table [B [ [m ] ] [ [ i , j ] ] , { j , 8 , 14} ] , { i , 15 , 2 1 } ] ;
L [ [m, 9 ] ] =
Table [ Table [B [ [m ] ] [ [ i , j ] ] , { j , 15 , 21} ] , { i , 15 , 2 1 } ] ] ;
For [m = 0 , m < k , m++;
S [ [m] ] =
XI [ F la t ten [
Table [ DeleteCases [
F la t ten [ Table [
SoundNote [
S t r ingJo in [NOTA2[ i ] ,
ToString [ j ] ] , {(m − 1 )∗0 . 1 , (m − 1 )∗0 . 1 +
0 .1∗L [ [m, l ] ] [ [ i , j ] ] } , NOTA3[ l ] ] , { j , 1 , 7} , { i , 1 ,
7 } ] ] , SoundNote [ , {(m − 1 )∗0 . 1 , (m − 1 )∗0 . 1} , ] ] , { l ,
1 , 9 } ] ] , 5 ] ] ; EmitSound [ Sound [ F lat ten [ S ] ] ] ] }
Manipulate [
GAMEOFLIFE3[ data , smin , smax , nmin , nmax ,
p ] , {{data , RandomInteger [{0 , 1} , {21 , 21} ]} ,
ControlType −> None} , De l imi ter , {{p , 50 , ”Numero de pasos ”} , {50 ,
60 , 70}} , De l imi ter ,
Item [ ” Regla de evo luc i o n ” , Alignment −> Center ] ,
Item [ ” ” , Alignment −> Center ] ,
{{smin , 3 , ” Sobrev iv i en t e mınimo ”} , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 ,
9}} , {{smax , 3 , ” Sobrev iv i en t e maximo”} , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 ,

62 C Reglas Semitotalısticas
9}} , {{nmin , 2 , ”Nacimiento mınimo ”} , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 ,
9}} , {{nmax , 3 , ”Nacimiento maximo”} , {1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9}} ,
De l imi ter , Item [ ” Condici on I n i c i a l ” , Alignment −> Center ] ,
Dynamic [ Panel [
Grid [ Outer [ Checkbox [ Dynamic [ data [ [#1 , #2 ] ] ] , {0 , 1} ] &, Range [ 7 ] ,
Range [ 7 ] ] ] ] ] , FrameLabel −> {”” , ”” , ”EJEMPLO 3”} ]

D. Palabras de Fibonacci
Este es un ejemplo extra, un poco alejado de los automatas celulares pero que si como sistema
dinamico. Los siguientes codigos generan la lista dado por el L−sistema:
LMove [ z S t r ing , \ [ Delta ] , p o s L i s t ] := Block [{ x , y , \ [ Theta ] , moves } ,
{x , y} = pos [ [ 1 ] ] ;
\ [ Theta ] = pos [ [ 2 ] ] ;
moves = {{x , y }} ;
Map[
( Switch [# ,
”+”, \ [ Theta ] += \ [ Delta ] ; ,
”−”, \ [ Theta ] −= \ [ Delta ] ; ,
”F” , {x , y} += {Cos [ \ [ Theta ] ] , Sin [ \ [ Theta ] ] } ] ;
AppendTo [ moves , {x , y } ] ; )
&, Characters [ z ] ] ;
Return [ moves ] ;
] ;
morfismo [ \ [ CapitalSigma ] , \ [Mu] , n ] :=
Block [ { \ [ Cap i ta lDe l ta ] = \ [ CapitalSigma ]} ,
Do [ \ [ Cap i ta lDe l ta ] = Flat ten [ \ [ Cap i ta lDe l ta ] / . \ [Mu] ] , {n } ] ;
Return [ \ [ Cap i ta lDe l ta ] ] ;
] ;
\ ]
PF[ n ] :=
Module [{A = morfismo [{0} , {1 −> 0 , 0 −> {0 , 1}} , n ] , B = 1} ,
B = Pa r t i t i o n [A,
2 ] / . {{1 , 0} −> ”FF+”, {0 , 1} −> ”F−F” , {0 , 0} −> ”F−F+”} //
St r ingJo in ;
LMove [B, 90 Degree , {{0 , 0} , 90 Degree } ] ] ;
Las siguientes funciones van a ir generando una tabla con cada uno de los puntos, y generan
un grafo que va uniendo con lıneas estos puntos siguiendo ese orden.
PF2 [ n ] :=
Module [{A = PF[ n ] , B = 1} ,

64 D Palabras de Fibonacci
B = Table [ Table [A [ [ i ] ] , { i , 1 , j } ] , { j , 1 , Dimensions [A ] [ [ 1 ] ] } ] ] ;
GrafiPF [ n ] :=
Module [{A = PF[ n ] , x = {1 , 1}} ,
x = {Max [ Table [A [ [ j , 1 ] ] , { j , Dimensions [A ] [ [ 1 ] ] } ] ] ,
Max [ Table [A [ [ j , 2 ] ] , { j , Dimensions [A ] [ [ 1 ] ] } ] ] } ;
Animate [ Graphics [ Line [PF2 [ n ] [ [ i ] ] ] ,
PlotRange −> {{0 , x [ [ 1 ] ] } , {0 , x [ [ 2 ] ] } } ] , { i , 1 ,
Dimensions [A ] [ [ 1 ] ] , 1} ,
DefaultDurat ion −> ( Dimensions [A ] [ [ 1 ] ] + 1)∗ . 0 8 ,
Animat ionRepet i t ions −> 1 , AnimationRunning −> True ] ]
Mor [ n ] := Pa r t i t i o n [ morfismo [{0} , {1 −> 0 , 0 −> {0 , 1}} , n ] , 2 ] ;
Por ultimo el siguiente codigo va determinado la siguiente nota indicando la regla del cambio
de la letra o el numero de la nota en la codificacion MIDI acorde al siguiente movimiento
del mismo.
Sonido [ x ] :=
Switch [ x , 0 , ”A” , 1 , ”B” , 2 , ”C” , 3 , ”D” , 4 , ”E” , 5 , ”F” , 6 , ”G” ] ;
PalFiboSonido1 [ n ] :=
Module [{ z =
Mor [ n ] / . {{1 , 0} −> ”FF+”, {0 , 1} −> ”F−F” , {0 , 0} −> ”F−F+”} //
Str ingJo in , k = Dimensions [Mor [ n ] ] [ [ 1 ] ] ,
m = Dimensions [Mor [ n ] ] [ [ 1 ] ] } ,
k = LMove [ z , 90 Degree , {{0 , 0} , 90 Degree } ] ;
m = Dimensions [ k ] [ [ 1 ] ] ;
Sound [ Table [
SoundNote [
S t r ingJo in [ Sonido [Mod[ k [ [ i , 1 ] ] , 7 ] ] ,
ToString [Mod[ k [ [ i , 2 ] ] , 7 ] ] ] , . 0 8 ] , { i , m} ] ] ] ;
GrafiPF2 [ n ] :=
Module [{A = PF[ n ] , x = {1 , 1}} ,
Animate [ Graphics [ Line [PF2 [ n ] [ [ i ] ] ] ] , { i , 1 , Dimensions [A ] [ [ 1 ] ] , 1} ,
DefaultDurat ion −> ( Dimensions [A ] [ [ 1 ] ] + 1)∗ . 0 8 ,
Animat ionRepet i t ions −> 1 , AnimationRunning −> True ] ]
Manipulate [{GrafiPF2 [m] ,

65
EmitSound [ PalFiboSonido1 [m] ] } , {{m, 8 ,
”N−esima palabra de F ibonacc i ”} , 1 , 11 , 1} ,
FrameLabel −> {”” , ”” , ”PALABRAS DE FIBONACCI”} ]
Bibliografıa
[1] Bilotta Eleonora, Pantano Pietro , Artificial Life Music Tells of Complexity, Centro
Interdipartimentale della Comunicaziones, Universita della Calabria, 2000.
[2] Burks Arthur W. (Editor) .Essays on Cellular Automata. University of Illinois
Press,1970.
[3] Burraston Dave , One Dimensional Cellular Automata Musical Experiments with Max,
University of Technology Sydney.
[4] Burraston Dave, Edmonds Ernest , Dan Livingstone y Eduard Reck Miranda, Cellular
Automata in MIDI based Computer Music, Faculty of Information Thecnology, Uni-
versity of Technology, Sydney and School of Computing, University of Plymouth, UK,
2004.
[5] Chopard Bastien, Droz Michel, Cellular Automata Modeling of Physical Systems, Cam-
bridge University Press, 1998.
[6] Codd Edgar F., Cellular Automata, Academic Press,Pag 27,1968.
[7] Gardner Martin, Mathematical Games - The fantastic combinations of John Conway´s
new solitaire game Life. Scientific American, October 1970, pag 120 - 123.
[8] Greenberg James M., Hassard B. D., Hastings and S. P., Pattern Formation and Periodic
Structures in Systems Modeled by Reaction-Difussion Equations, Boletin de la sociedad
americana de matematicas, Volumen 84, Numero 6, Noviembre 1978.
[9] Hedlund, G.A., Endormorphisms and automorphisms of the shifts dynamical sys-
tem,Theory of Computing Systems Volume 3, Number 4 pag 320-375, Springer 1969.
[10] Heinz-Otto-Peitgen, Hartman Jurgens, Dietmar Soupe, Chaos and Fractals, New Fron-
tiers of Science,Springer-Verlog,1992.
[11] Langton Christopher G. , Self-reproduction in cellular automata.Physica D, 10:135-
144,1984.
[12] Miranda Eduardo Reck , Evolving Cellular Automata Music: From Sound Synthesis to
Composition, Sony Computer Science Laboratory Paris.
Bibliografıa 67
[13] Pivato Marcus , The Ergodic Theory of Cellular Automata,Department of Mathema-
tics,Trent University,pag 7-8.
[14] Poundston William, The Recursive Universe, William Morrow and Company Inc.
[15] Romero Costas Matıas , Causa Emiliano y Pirotta Tarsicio Lucas (Grupo Biopus),
Automatas Musicales Interactivos, Centro de Experimentacion e Investigacion en Artes
Electronicas de la Universidad Nacional de Tres de Febrero,Junio 2009.
[16] Seck Tuoh Mora Juan Carlos, Automatas Celulares Lineales Reversible, Agosto 1997.
[17] Genaro Juarez Martınez, Teorıa del campo promedio en automatas celulares similares a
”The game of life”, Centro de investigaciones y estudios avanzados del I.P.N.,Octubre
2000.
[18] Thompson D’Arcy Wentworth ,On growht and form,editado por J.T. Bonner, Cambrid-
ge University.
[19] Toffoli Tommaso; Margolus Norman (1987), Cellular Automata Machines: A New En-
viroment for Modeling, MIT Press, Chapter 17.2, Ising systems” pp 186-190.
[20] Wolfram Stephen , Statistical mechanics of cellular automata, Institute for Advanced
Study, Princeton.
[21] Wuensche Andrew, Lesser Mike. The Global Dynamics of Cellular Automata. Santa Fe
Institute. 1992





























