Embed Size (px)
DESCRIPTION
Tiểu luận cao học
Citation preview
CAO HỌC CHUYÊN NGÀNH TỰ ĐỘNG HÓA K2007
BÁO CÁO TIỂU LUẬN
MÔ HÌNH HÓA VÀ NHẬN DẠNG HỆ THỐNG
Nhận dạng và Điều khiển
Hệ bồn nước kép
GVHD : PGS.TS Nguyễn Thị Phương Hà
HVCH : Nguyễn Đức Hoàng (01507679)
Tp Hồ Chí Minh 16/12/2007

Đặt vấn đề
Mục đích của tiểu luận này là nhằm giới thiệu về lĩnh vực nhận dạng và điều khiển trực
tuyến. Vì chỉ giới hạn ở một tiểu luận nên ở đây chỉ xin trình bày phương pháp bình phương
cực tiểu đệ quy để nhận dạng hệ thống và sử dụng phương pháp đặt cực để tính tín hiệu điều
khiển trên cơ sở các tham số ước lượng được. Ưu điểm của phương pháp này là có thể thực
hiện trực tuyến, do đó có thể giải quyết các đối tượng có tham số thay đổi hay phi tuyến.
Để kiểm tra chất lượng của thuật toán nhận dạng cũng như bộ điều khiển đặt cực, hệ bồn
nước kép được sử dụng. Trong đó, ta sử dụng ba cấu hình của hệ bồn nước kép. Các kết quả
thu được cho thấy thuật toán nhận dạng cũng như bộ điều khiển đặt cực cho kết quả rất tốt.
Tài liệu tham khảo cho tiểu luận này chủ yếu là cuốn “Digital Self-tuning controllers: Algorithms, Implementation and Applications” của các tác giả V. Bobál, J. Böhm, J.
Fessl and J. Macháček.
1. Mô hình quá trình ngẫu nhiên
Để tạo ra một mô hình chúng ta tìm hàm f mô tả hành vi ngõ ra đối tượng y(t) là hàm của
các biến ngõ vào, điển hình là ngõ ra bộ điều khiển u(t), và các biến đo khác có thể ảnh
hưởng lên ngõ ra, chẳng hạn biến nhiễu v(t). Do đó ta giả sử
(1)
Tuy nhiên, ngõ ra của đối tượng thực ít khi là hàm tiền định theo các biến vào đo được.
Nhiễu xuất hiện ở ngõ ra đối tượng , thể hiện các ảnh hưởng không đo được lên quá trình,
những thay đổi ở điểm làm việc, trong cấu tạo vật liệu thô, vân vân… Những ảnh hưởng
này, thường rất khó mô tả chính xác, được thêm vào như những ảnh hưởng ngẫu nhiên. Khi
đó, dạng mô hình tổng quát nhất có thể được đặc trưng bởi quan hệ sau
(2)
Trong đó n(t) là số hạng miêu tả những ảnh hưởng ngẫu nhiên.
Mô hình rời rạc
Khi mô tả đối tượng động liên tục thì cần phải làm việc với vi phân của tín hiệu đo, trong
khi đó xây dựng mô hình rời rạc thì đơn giản hơn đáng kể, dựa vào giá trị tín hiệu chỉ được
lấy ở những chu kì đều đặn T0. Máy tính số, được sử dụng như đơn vị điều khiển trong vòng
điều khiển, chỉ hoạt động tại các thời điểm rời rạc tk = kT0 (k = 0, 1, 2,…). Trong trường
hợp điều khiển các quá trình liên tục, chúng ta xét đối tượng điều khiển liên tục và bộ điều
khiển rời rạc. Đối với vòng điều khiển này, để làm việc đúng thì giao tiếp giữa hai hệ thống
động hoạt động khác nhau này là rất quan trọng. Bộ lấy mẫu và giữ được sử dụng như bộ
giao tiếp. Phần lấy mẫu lấy mẫu tín hiệu liên tục tại các thời điểm lấy mẫu T0 để tạo ra tín
hiệu ngõ ra như một chuỗi xung. Chiều cao của các xung bằng giá trị của tín hiệu ngõ vào
tại thời điểm lấy mẫu. Đối với việc điều khiển các quá trình trong thực tế thì khâu giữ bậc
nhất được sử dụng hầu như dành riêng để giữ xung không đổi trong khoảng chu kì lấy mẫu.
Do đó, cần phải sử dụng mô tả toán học thích hợp để biểu diễn hành vi động học của các
thành phần trong vòng điều khiển được rời rạc hóa theo cách này. Cách mô tả như vậy là
biểu thức sử dụng biến đổi Z. Nếu G(s) là hàm truyền của hệ thống động liên tục thì biểu
thức dưới đây để tìm hàm truyền rời rạc với khâu giữ bậc 0 là hợp lý
(3)
Hàm truyền này là hàm hữu tỉ theo biến phức z. Chú ý biến phức z có ý nghĩa của toán tử
tiến và z-1
là toán tử lùi, vì vậy
Cấu trúc mô hình đơn giản, nhận dạng từ dữ liệu đo, phù hợp để tổng hợp vòng điều khiển
rời rạc và để mô tả và biểu diễn các loại mô hình nhiễu khác nhau bao gồm cả mô hình
nhiễu là ưu điểm của hàm truyền rời rạc (3).
Bộ dự báo
Có thể biểu diễn mô tả rời rạc tổng quát của hệ thống động như là một hàm của các giá trị biến đo trước, nghĩa là
(4)
Trong đó, y(k) là giá trị của biến ngõ ra tại khoảng lấy mẫu k, nghĩa là tại thời điểm t = kT0
(T0 là chu kì lấy mẫu mà ở phương trình (4) nó lấy bằng 1). Vấn đề là làm sao xác định số
hạng nhiễu chính xác hơn. Nhiễu n(k) có thể được mô hình hóa như một tín hiệu xuất phát
từ nhiễu có đặc trưng đã biết truyền qua bộ lọc được cho. Theo cách tương tự như đối
tượng, bộ lọc có thể được mô tả theo mối quan hệ với các biến vào ra có trễ. Do đó, chúng
ta có
(5)
Trong đó, es(k) là thành phần ngẫu nhiên không đo được. Nếu ta giới hạn tới một hàm tuyến
tính f , thì có thể đạt được mô hình ARMAX tương tự
(6)
hoặc ở dạng phổ biến hơn sử dụng toán tử lùi z-1
(7)
Trong đó các đa thức trong phương trình (7) có dạng
(8)
Tuy nhiên, mô hình ARMAX không hoàn toàn phù hợp cho điều khiển thích nghi. Nếu
các tham số của nó (hệ số của các đa thức A, B, C, D) là cái để nhận dạng sử dụng dữ liệu
đo ta gặp phải vấn đề nhận dạng các hệ số của đa thức C(z-1
) bởi vì nhiễu giả es(k) không
thể đo được. Mặc dù vẫn có cách nhận dạng (ví dụ, phương pháp bình phương cực tiểu mở
rộng) cho phép nhận dạng C(z-1
), nhưng sự hội tụ của nó nói chung không được bảo đảm và
thường rất chậm. Do đó, hầu hết các thiết kế bộ điều khiển thích nghi dựa trên mô hình đệ
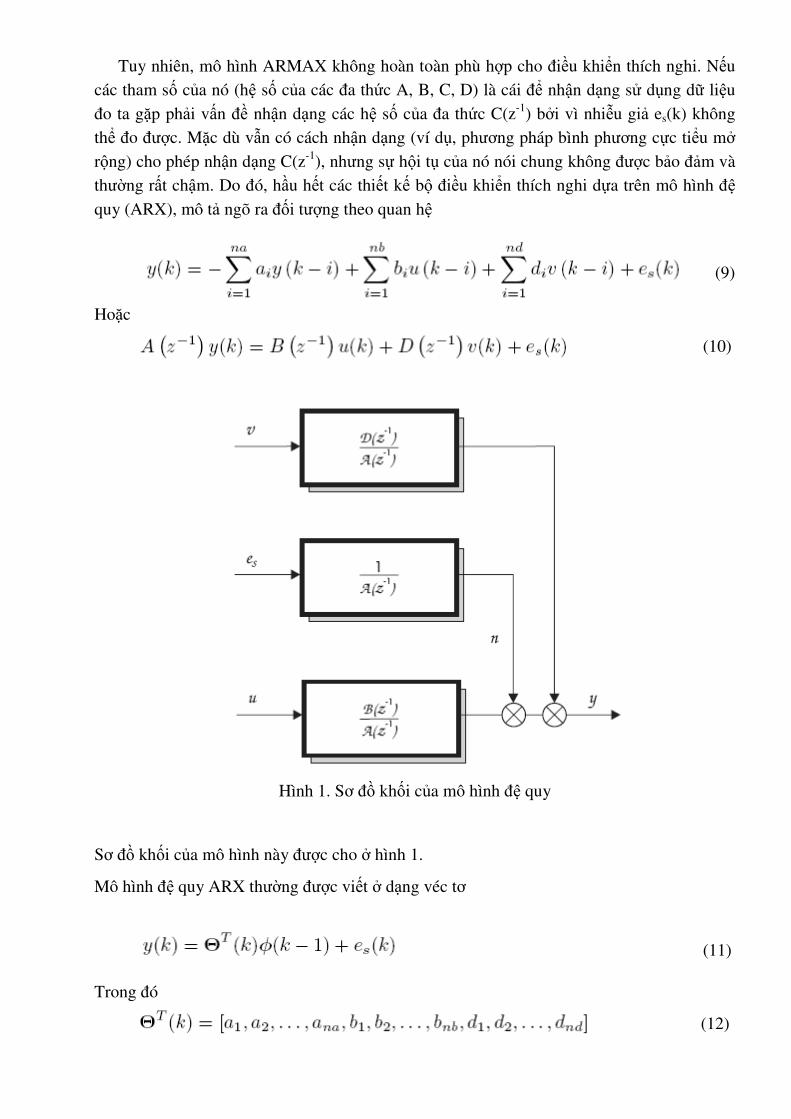
quy (ARX), mô tả ngõ ra đối tượng theo quan hệ
(9)
Hoặc
(10)
Hình 1. Sơ đồ khối của mô hình đệ quy
Sơ đồ khối của mô hình này được cho ở hình 1.
Mô hình đệ quy ARX thường được viết ở dạng véc tơ
(11)
Trong đó
(12)
là véc tơ tham số của mô hình đang xét và
(13)
là véc tơ dữ liệu hay phần tử đệ quy.
Chú ý
Chất lượng của mô hình phụ thuộc lớn vào chu kì lấy mẫu và bậc của mô hình đệ quy.
Trong mô hình hóa và mô phỏng, cần phải thỏa mãn quy tắc vòng hở rời rạc phải duy trì ít
nhất một khoảng thời gian trễ thậm chí trong hàm truyền liên tục không có trễ. Ngược lại
các vòng lặp đại số xảy ra khi vòng này đóng kín, là không thực tế.
Chất lượng của mô hình đệ quy chủ yếu được đánh giá bởi sai số dự báo, nghĩa là sai lệch
(14)
Trong đó ŷ(k) được tính theo (9) với es(k) = 0. Sai số dự báo đóng một vai trò quan trọng
trong nhận dạng tham số đối với mô hình đệ quy được dẫn ra từ dữ liệu đo. Việc chọn cấu
trúc (bậc) của mô hình đệ quy và chu kì lấy mẫu thích hợp cũng quan trọng. Cần phải nhấn
mạnh rằng để có một mô hình tốt thì sai số dự báo không chỉ phải nhỏ mà còn tương ứng
với nhiễu trắng (không tương quan) với gía trị trung bình bằng 0.
Chất lượng của mô hình cũng được đánh giá theo mục đích sử dụng. Những đặc trưng mô
hình quan trọng là những đặc trưng được sử dụng để thiết kế bộ điều khiển. Ví dụ, trong
phương pháp thiết kế PID Ziegler-Nichols, đặc trưng quan trọng là độ lợi tới hạn của đối
tượng. Khi sử dụng phương pháp thiết kế đặt cực, ta yêu cầu mô hình phản ánh đúng việc
đặt các zero và cực. Đối với phương pháp LQ, số hạng nhiễu ngẫu nhiên cũng yêu cầu thể
hiện nhiễu đang xét.
2. Nhận dạng quá trình
Trong điều khiển thích nghi công việc nhận dạng cũng quan trọng như vai trò của tổng hợp
bộ điều khiển. Dĩ nhiên, đối với điều khiển thích nghi thì nhận dạng cũng có những đặc
trưng riêng của nó mà hầu hết các trường hợp liên quan đến ước lượng các tham số đối với
mô hình đệ quy ARX sử dụng phương pháp bình phương cực tiểu. Sau đây, ta sẽ khảo sát tỉ mỉ các lý do này. Khi nhận dạng một đối tượng đã cho, ta phải tuân theo thủ tục sau:
���� Chuẩn bị thí nghiệm nhận dạng. Chọn tín hiệu (kích thích) ngõ vào thích hợp nhất, hòa
hợp giữa kích thích tối ưu về lý thuyết và áp dụng theo kỹ thuật sử dụng. Quá trình nhận
dạng có thể được quan sát, ngắt, và tín hiệu ngõ vào có thể thay đổi.
���� Dữ liệu thu thập trong suốt thí nghiệm có thể lưu trữ và sau đó được xử lý sử dụng các
phương pháp khác nhau với các mô hình khác nhau, lọc,…
���� Tham số mô hình thu thập có thể được kiểm tra sử dụng dữ liệu lấy mẫu khác.
���� Thí nghiệm nhận dạng có thể được lặp lại, có thể với tri thức đạt được từ những thí
nghiệm trước đó.
���� Điều kiện để không có phân cực của các ước lượng có thể được kiểm tra và xác nhận.
Tuy nhiên, khi thực hiện nhận dạng để điều khiển thích nghi, cần phải thỏa mãn các điều
kiện sau:
� Dữ liệu (ngõ vào) được tạo ra bởi bộ điều khiển hồi tiếp.
� Mục đích của bộ điều khiển là bù nhiễu và ổn định hệ thống. Các điều kiện này làm cho
việc nhận dạng tham số quá trình trở nên khó khăn hơn.
� Quá trình nhận dạng để điều khiển thích nghi mất một thời gian rất dài. Do đó, không thể
giả sử các ước lượng tham số không đổi. Các phương pháp để ước lượng tham số thay
đổi theo thời gian là rất quan trong.
� Việc nhận dạng phải có thể làm việc với những điều kiện hoạt động khác nhau của đối
tượng (tại trạng thái tương đối xác lập, có nhiễu, và trong suốt việc chuyển tiếp giữa các
trạng thái).
� Cấu trúc của mô hình nhận dạng (bậc) không thể thay đổi trong khi chạy.
� Thuật toán nhận dạng phải tin cậy về số và đủ nhanh.
Từ phân tích này ta thấy các điều kiện chi phối điều khiển thích nghi không phải lúc nào
cũng lý tưởng cho nhận dạng. Các điều kiện để đạt được ước lượng không bị phân cực
không phải lúc nào cũng được kiểm tra, chúng chỉ được giả thiết trong những trường hợp
này. Nếu các giả thiết này không thỏa mãn, điều khiển thích nghi có thể đi vào khó khăn.
2.1. Những vấn đề điển hình trong điều khiển thích nghi
Trong phần này ta sẽ minh họa vài vấn đề cụ thể trong nhận dạng để thiết kế bộ điều khiển.
Thông tin biết trước
Khi sử dụng nguyên lý tương đương chắc chắn, tham số mô hình phải tiến về giá trị đúng
ngay từ lúc bắt đầu điều khiển. Điều này có nghĩa rằng khi thuật toán thích nghi bắt đầu
hoạt động, việc nhận dạng phải chạy từ các điều kiện khởi tạo thích hợp – kết quả của thông
tin biết trước tốt nhất có thể. Vai trò của nó trong nhận dạng thường bị đánh giá thấp. Trong
một thí nghiệm nhận dạng tiêu biểu vai trò của nó thục ra không quan trọng lắm vì ta chỉ quan tâm các kết quả nhận dạng lúc cuối thí nghiệm khi đủ dữ liệu được phân tích. Trong
điều khiển thích nghi, điều quan trọng là phải đưa vào mọi thông tin có thể trong các điều
kiện khởi tạo để nhận dạng, cụ thể vì các lý do sau:
� Các ước lượng tham số phải biểu diễn đối tượng ngay từ khi bắt đầu quá trình nhận dạng
để ngăn bộ điều khiển thiết kế khỏi thực hiện không chính xác.

� Dữ liệu thu được khi bộ điều khiển đang hoạt động không phải lúc nào cũng đủ thông tin
và trong trường hợp này thông tin biết trước cung cấp thông tin an toan tối thiểu.
Điều kiện khởi tạo cho các phương pháp nhận dạng được sử dụng phổ biến nhất được
thể hiện bởi ước lượng tham số khởi đầu và ma trận hiệp phương sai của nó. Mặc dù hầu hết
người dùng hiểu được tầm quan trọng của ước lượng tham số khởi đầu và với một sự nổ lực
nào đó thường có thể gán các giá trị thực sử dụng chuyên gia kỹ thuật, nhưng tầm quan
trọng của ma trận hiệp phương sai thường bị bỏ qua và khó ước lượng. Phương pháp dữ liệu
giả đã chứng minh là một cách tương đối đơn giản và có thể thực hiện được để tìm được các
điều kiện khởi tạo cho nhận dạng, bao gồm nhiều hơn hoặc ít hơn thông tin ban đầu. Nó làm
việc nhờ vào một mô hình (có thể rất đơn giản) thể hiện đặc trưng đang phân tích để tạo ra
dữ liệu.
Ví dụ, nếu ta biết độ lợi đối tượng bằng “g”, khi đó giá trị ngõ ra tương ứng đối với tín
hiệu ngõ vào u(t) bất kì sẽ là y(t) = gu(t). Nếu ta biết một điểm của đặc trưng tần số, thì khi
đó có thể tìm được nhiều dữ liệu hơn sao cho dữ liệu ngõ vào sẽ là một sóng sin với tần số
đã cho và ngõ ra sẽ là một sóng sin bị dịch với biên độ tương ứng với giá trị tuyệt đối của
đặc trưng tần số đối tượng tại điểm đó và độ dịch tương ứng với pha.
Tương tự, dữ liệu có thể được tạo ra đối với thông tin yêu cầu khác. Trong những ví dụ ít
phức tạp hơn dữ liệu có thể được tính trước, đối với các trường hợp phức tạp hơn dữ liệu có
thể tìm được sử dụng mô phỏng.
Bằng cách xử lý dữ liệu này theo cách tương tự như thể chúng là thực, thì có thể tìm
được ước lượng khởi tạo và ma trận hiệp phương sai. Vấn đề là dữ liệu này không thể được
xử lý sử dụng các phương pháp thông thường (ví dụ phương pháp bình phương cực tiểu).
Chúng ta phải nhớ rằng các thành phần riêng rẽ của thông tin biết trước có thể xung đột
từng phần, nhưng trong mọi trường hợp thông tin này chỉ có thể được xét để có một xác suất
nào đó. Điều này có thể xảy ra việc sử dụng nhiều dữ liệu về một thông tin cụ thể (ví dụ, độ
lợi) dẫn đến thông tin trở nên quá cứng trong các ước lượng đến nổi thậm chí một lượng lớn
dữ liệu thực không thể thay đổi nó.
Thực tế, một điều đáng ngạc nhiên là thạm chí một lượng rất ít thông tin biết trước có
thể ảnh hưởng tích cực lên việc khởi tạo cho bộ điều khiển thích nghi nếu đưa vào đúng.
Thông tin biết trước cũng quan trọng để xác định cấu trúc mô hình khi chuẩn bị điều khiển
thích nghi.
Theo dõi tham số thay đổi theo thời gian
Như đã ghi chú ban đầu, giả thiết tham số không đổi là không thể chấp nhận được khi xét
các bộ điều khiển thích nghi, chủ yếu vì những lý do sau:
� Chu kì hoạt động của bộ điều khiển dài.
� Thay đổi trong tham số của mô hình tuyến tính cùng với thay đổi của điểm hoạt động
của đối tượng.
Vấn đề ước lượng các tham số thay đổi theo thời gian không trình ở đây. Khi không có
thông tin về đặc trưng của những thay đổi trong tham số, vấn đề có thể được giải quyết sử
dụng kĩ thuật hệ số quên. Tốt nhất là phương pháp hệ số quên theo hàm mũ, trong đó ảnh
hưởng của dữ liệu cũ lên ước lượng tham số và ma trận hiệp phương sai giảm theo hàm mũ.
Nhược điểm chính của kĩ thuật này trong chế độ thích nghi là mất thông tin khi quá trình ổn
định vì dữ liệu không thể cung cấp đủ thông tin về nó. Vấn đề này có thể được giải quyết
bằng cách ngừng quá trình nhận dạng, sử dụng hệ số quên biến đổi hoặc các dạng hệ số
quên khác (hướng thích nghi, điều hòa) có thể thay đổi lượng thông tin bị quên theo đặc
trưng của dữ liệu.
2.2. Các thuật toán nhận dạng
Đối với mục đích điều khiển sử dụng bộ điều khiển tự chỉnh định, ta chỉ quan tâm các
phương pháp nhận dạng thực nghiệm có thể thực hiện trong thời gian thực.Thuật toán đệ
quy là thích hợp nhất để ước lượng tham số ở thời gian thực khi ước lượng ở bước rời rạc k
được tìm sử dụng dữ liệu mới để hiệu chỉnh ước lượng trước đó ở thời điểm k-1.
Các thuật toán ước lượng đệ quy phổ biến nhất để ước lượng các tham số của mô hình ARX
như sau:
� Phương pháp bình phương cực tiểu đệ quy.
� Phương pháp biến công cụ đệ quy.
� Xấp xỉ xác suất.
và để ước lượng tham số của mô hình ARMAX:
� Phương pháp bình phương cực tiểu đệ quy mở rộng.
� Phương pháp xác suất lớn nhất đệ quy.
2.3 . Nhận dạng đệ quy sử dụng phương pháp bình phương cực tiểu
Có 3 phương pháp:
• Bình phương tối thiểu.
• Bình phương tối thiểu với hệ số quên theo hàm mũ.
• Bình phương tối thiểu với hệ số quên theo hướng thích nghi.
Tất cả các phương pháp này có thể được sử dụng cho nhận dạng trực tuyến các quá trình
rời rạc được mô tả bởi hàm truyền dưới đây:
(15)
Ngỏ ra ước lượng của quá trình ở bước k ˆ( )y k đđược tính dựa vào ngỏ vào quá trình u và
ngỏ ra y trướcđđó theo phương trình (16).
(16)
trong đó 1 1
ˆ ˆˆ ˆ,..., , ,...,n m
a a b b là các ước lượng hiện tại của thông số quá trình. Phương trình
này có thể viết lại dượi dạng vector thích hợp cho việc tính tóan hơn, xem phương trình
(17)
(17)
Vector 1k −Θ chứa các ước lượng thông số của qúa trình được tính ở bước trước và vector
kΦ chứa các giá trị vào ra để tính toán gía trị hiện tại
ky .Các vector này được sử dụng để
mô tả các phương pháp nhận dạng khác nhau trong phần tiếp theo.
a. Phương pháp bình phương tối thiểu đệ quy
Các phương pháp bình phương tối thiểu được dựa vào sự tối thiểu tổng bình phương sai số
dự báo.
(18)
Trong đđó i
y là ngỏ ra qúa trình ở bước thứ i và tích T
k iΘ Φ thể hiện ngõ ra qúa trình dự
báo.Việc giải phương trình này dẫn đến kiểu đệ quy của phương pháp bình phương tối thiểu
trong đó vector ước lượng thông số được cập nhật ở mỗi bước theo phương trình (19) .
(19)
Ma trận hiệp phương sai C khi đó được cập nhật theo phương trình (20).
(20)
Gia trị đầu của ma trận C xác định ảnh hưởng của các ước lượng thông số ban đầu đối
với qúa trình nhận dạng.
b. Phương pháp bình phương tối thiểu đệ quy với hệ số quên theo hàm mũ
Nhược điểm chính của phương pháp bình phương tối thiểu đệ quy thuần tuý này là thiếu
trọng số tín hiệu. Mỗi ngõ vào và ra ảnh hưởng lên kết quả bởi cùng trọng số nhưng thông
số qúa trình thực sự có thể thay đổi theo thời gian .Do đó các ngõ vào và ra mới ảnh hưởng

lên ngõ ra nhiều hơn các thông số cũ. Vấn đề này có thể được giải quyết bằng phương pháp
hệ số quên theo hàm mũ, sử dụng hệ số quên ϕ và làm giảm trọng số của dữ liệu các bước
trước. Các trọng số 1kϕ − được gán cho các giá trị i
u và i
y . Các ước lượng thông số được
tính theo phương trình dưới đây:
(21)
c. Phương pháp bình phương tối thiểu đệ quy với hệ số quên theo hướng thích nghi
Phương pháp hệ số quên theo hàm mũ có thể được cải tiến hơn nữa bằng hệ số quên theo
hướng thích nghi thay đổi hệ số quên theo sự thay đổi của tín hiệu vào ra. Thông số quá
trình được cập nhật sử dụng theo phương trình đệ quy:
(22)
Trong đó:
(23)
Ma trận C được cập nhật ở mỗi bước theo phương trình (24):
(24)
Trong đó:
(25)
Hệ số forgetting được cập nhật như sau:
(26)
Trong đó:

(27)
2.4. Giải phương trình Diophantine
Bộ điều khiển hồi tiếp nuôi tiến (FBFW controller):
Y = BR/(AP+BQ)*W (28)
Các điều kiện : 1) AP+BQ = D
2) BR+FS = D trong đó W = H/F và S là đa thức bất kì
Xét đối tượng bậc hai
A = 1 + a1*z^-1 + a2*z^-2 B = b1*z^-1 + b2*z^-2
P = p0 + p1*z^-1 Q = q0 + q1*z^-1
Từ đó ta có hệ phương trình tuyến tính :
00
11 1 1
22 1 2 1 0
32 2 1
1 0 0 0
1 0*
0 0
dp
da b p
da a b b q
da b q
=
Trong đó { }1 2 1 2a a b b là các thông số ước lượng trực tuyến.
{ }0 1 2 3d d d d là các hệ số từ phương trình đặc trưng mong muốn .
Giải phương trình này sẽ được các giá trị { }0 1 0 1p p q q
0 0
1 0 2 2 1 0 2 1 2 2 2 1 1 2 2 1 1 3 2 2 1 1 2 2 1 1
0 0 1 1 2 0 1 1 2 2 0 2 1 1 2 1 1 2 2 2 3 1 2 2 1 1 2 2 1 1
1 2 0 1 2 2 2 0 1 2 2 1 1 2 2 3 2
;
( - - - ) /(- - );
- ( - - - - ) /(- - );
- ( - - -
p d
p d b b a d b b a b b d b b d b b d b b a b b a b b
q d a a b d a b a a d b d a b d b a b d d b b b a b b a b b
q a d a b a a d b a b d b a d d b d
=
= + +
= + + +
= + + 3 1 1 2 2 1 1 2 2 1 1) /(- - );b a b b a b b a b b
+
3. Mô tả hệ thống bồn nước kép
Mô hình bồn nước kép có thể chia thành 3 cấu hình để điều khiển như sau.
Cấu hình 1
Xem hình 2. Bơm bơm nước vào bồn một và yêu cầu thiết kế bộ điều khiển để điều khiển
mực nước trong bồn 1. Bồn 2 chưa sử dụng đến.
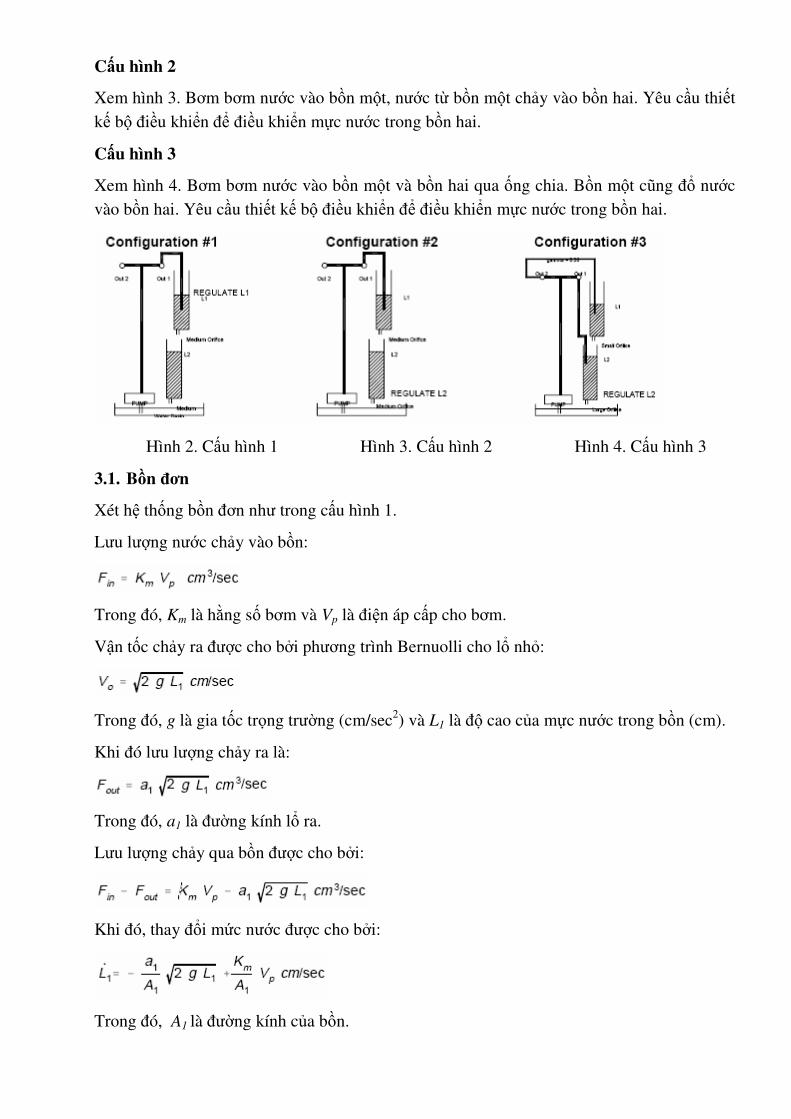
Cấu hình 2
Xem hình 3. Bơm bơm nước vào bồn một, nước từ bồn một chảy vào bồn hai. Yêu cầu thiết
kế bộ điều khiển để điều khiển mực nước trong bồn hai.
Cấu hình 3
Xem hình 4. Bơm bơm nước vào bồn một và bồn hai qua ống chia. Bồn một cũng đổ nước
vào bồn hai. Yêu cầu thiết kế bộ điều khiển để điều khiển mực nước trong bồn hai.
Hình 2. Cấu hình 1 Hình 3. Cấu hình 2 Hình 4. Cấu hình 3
3.1. Bồn đơn
Xét hệ thống bồn đơn như trong cấu hình 1.
Lưu lượng nước chảy vào bồn:
Trong đó, Km là hằng số bơm và Vp là điện áp cấp cho bơm.
Vận tốc chảy ra được cho bởi phương trình Bernuolli cho lổ nhỏ:
Trong đó, g là gia tốc trọng trường (cm/sec2) và L1 là độ cao của mực nước trong bồn (cm).
Khi đó lưu lượng chảy ra là:
Trong đó, a1 là đường kính lổ ra.
Lưu lượng chảy qua bồn được cho bởi:
Khi đó, thay đổi mức nước được cho bởi:
Trong đó, A1 là đường kính của bồn.

3.2. Bồn kép (theo cấu hình 2)
Xét cấu hình 2, ở đây bơm bơm nước vào bồn 1 và bồn nước chảy vào bồn 2. Đối với bồn 1
phương trình được thành lập như trên.
Đối với bồn 2, lưu lượng vào bằng lưu lượng chảy ra bồn 1.
Và lưu lượng chảy ra là:
Vì vậy, mực nước trong bồn 2 được viết như sau:
3.3. Bồn kép (theo cấu hình 3)
Cấu hình 3 điều tiết lưu lượng bơm chảy qua bồn 1 và bồn 2. Đặt o1 là đường kính của ống
chảy vào bồn 1 và o2 là đường kính của ống chảy vào bồn 2.
Lưu lượng chảy vào các bồn 1 và 2 tỉ lệ với tiết diện o1 và o2 như sau:
Đối với cấu hình 3, bơm lưu lượng Fp1 chảy vào bồn 2 còn lưu lượng Fp2 chảy vào bồn 1.
4. Kết quả mô phỏng
Trong tiểu luận này, thuật toán nhận dạng theo phương pháp bình phương cực tiểu đệ quy
với hệ số quên theo hướng thích nghi được sử dụng vì đối tượng đang xét là phi tuyến. Bộ
điều khiển sử dụng phương pháp đặt cực với các cực được chọn tùy theo yêu cầu chất
lượng. Cần lưu ý đến việc khởi tạo các tham số ban đầu, trong tiểu luận này, mô hình ARX
bậc hai được sử dụng với khởi tạo tham số đầu như sau: θ0 = [0.1; 0.2; 0.3; 0.4], ma trận
hiệp phương sai được khởi tạo tùy vào cấu hình cụ thể.
Ngoài ra trong cấu hình 2 và 3, ngoài điều khiển mực chất lỏng trong bồn 2 ta phải điều
khiển thêm mực chất lỏng trong bồn 1 vì vấn đề giới hạn kích thước của các bồn.
Sau đây, ta sẽ xét việc điều khiển từng cấu hình một.
4.3. Cấu hình 1
Xét sơ đồ mô phỏng như ở hình 5.
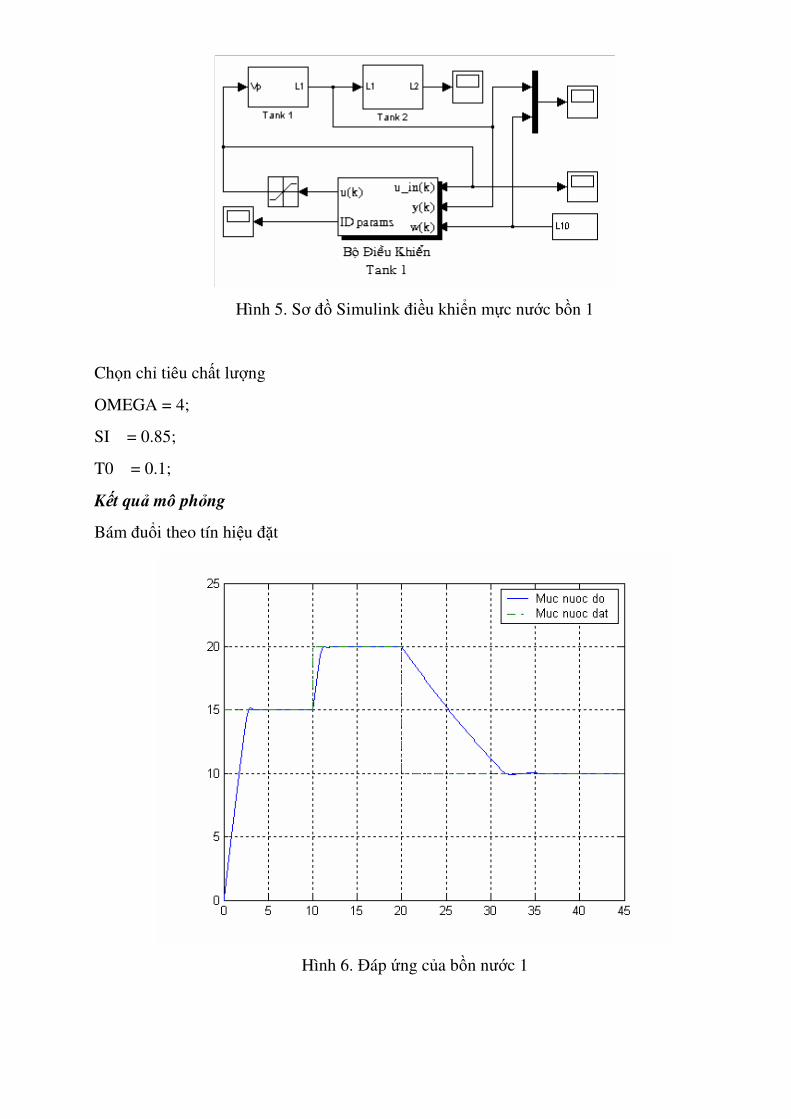
Hình 5. Sơ đồ Simulink điều khiển mực nước bồn 1
Chọn chỉ tiêu chất lượng
OMEGA = 4;
SI = 0.85;
T0 = 0.1;
Kết quả mô phỏng
Bám đuổi theo tín hiệu đặt
Hình 6. Đáp ứng của bồn nước 1
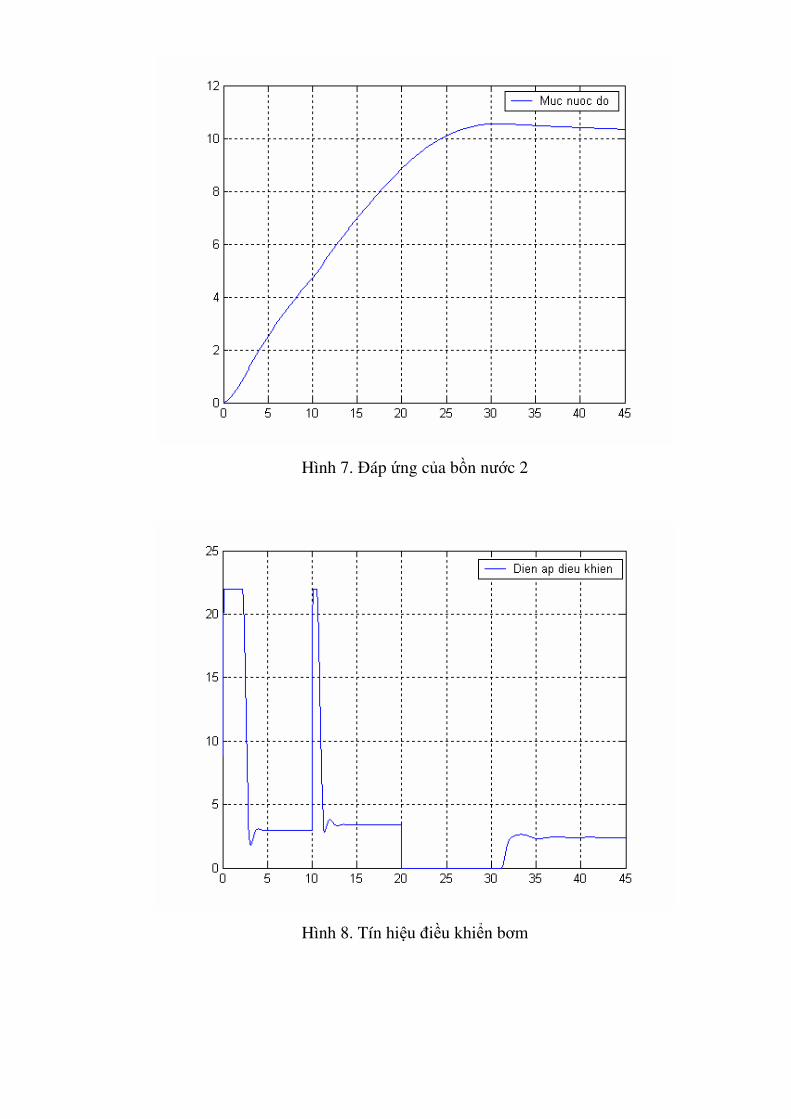
Hình 7. Đáp ứng của bồn nước 2
Hình 8. Tín hiệu điều khiển bơm
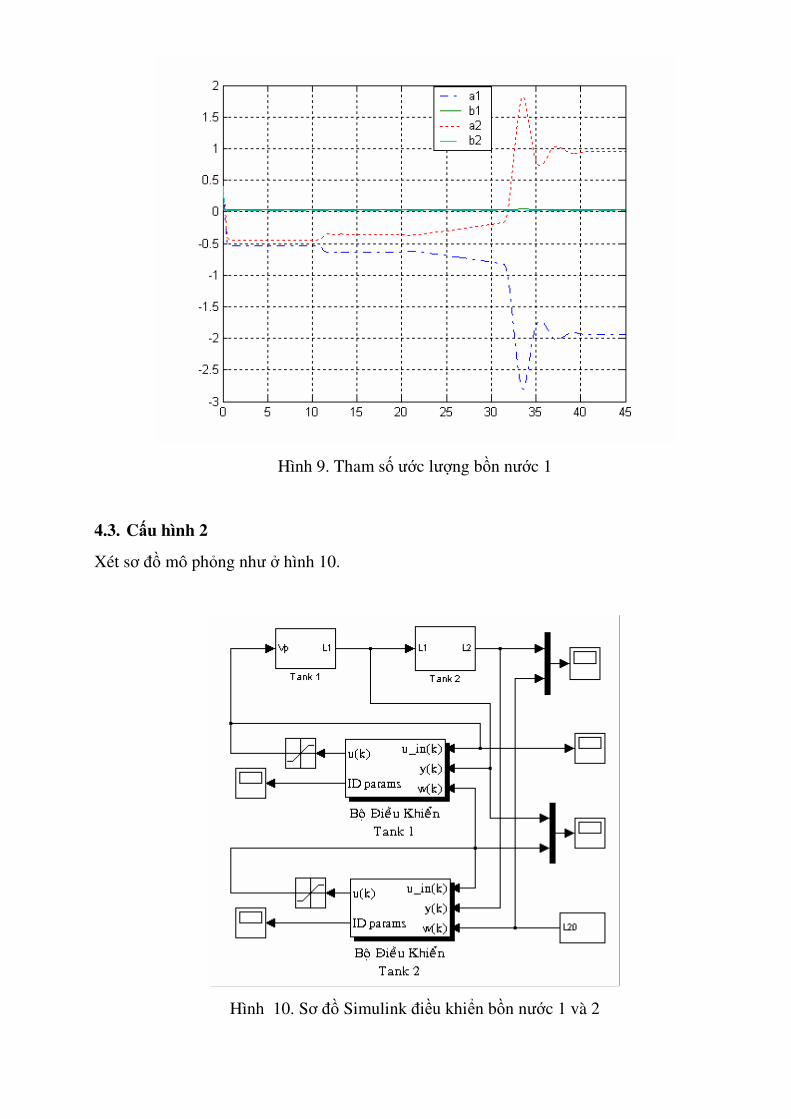
Hình 9. Tham số ước lượng bồn nước 1
4.3. Cấu hình 2
Xét sơ đồ mô phỏng như ở hình 10.
Hình 10. Sơ đồ Simulink điều khiển bồn nước 1 và 2
Chọn chỉ tiêu chất lượng
Bồn 1
OMEGA = 4;
SI = 0.9;
T0 = 0.1;
Bồn 2
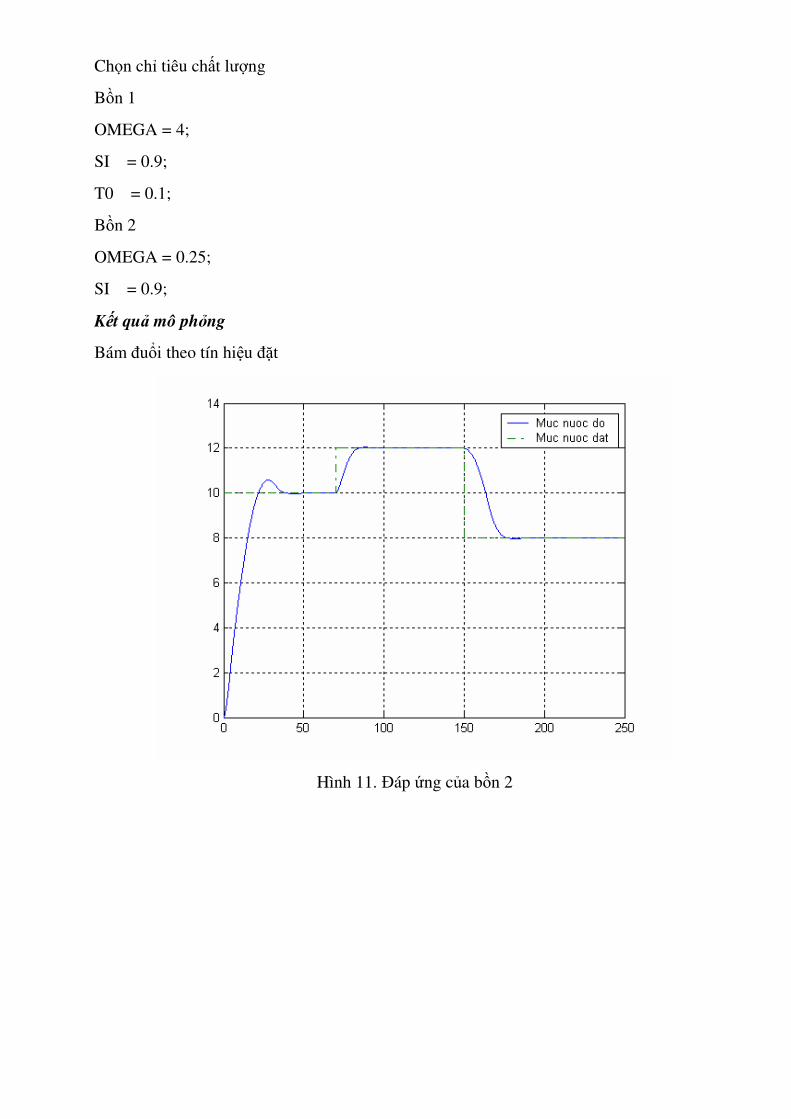
OMEGA = 0.25;
SI = 0.9;
Kết quả mô phỏng
Bám đuổi theo tín hiệu đặt
Hình 11. Đáp ứng của bồn 2
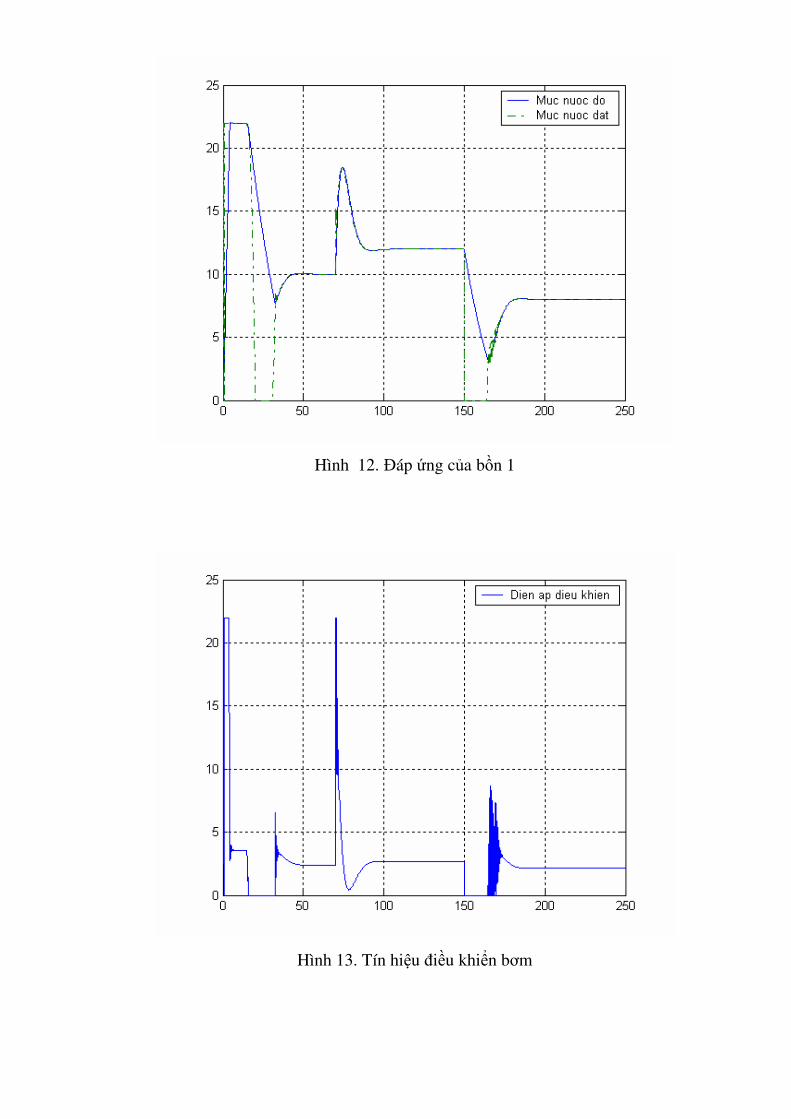
Hình 12. Đáp ứng của bồn 1
Hình 13. Tín hiệu điều khiển bơm
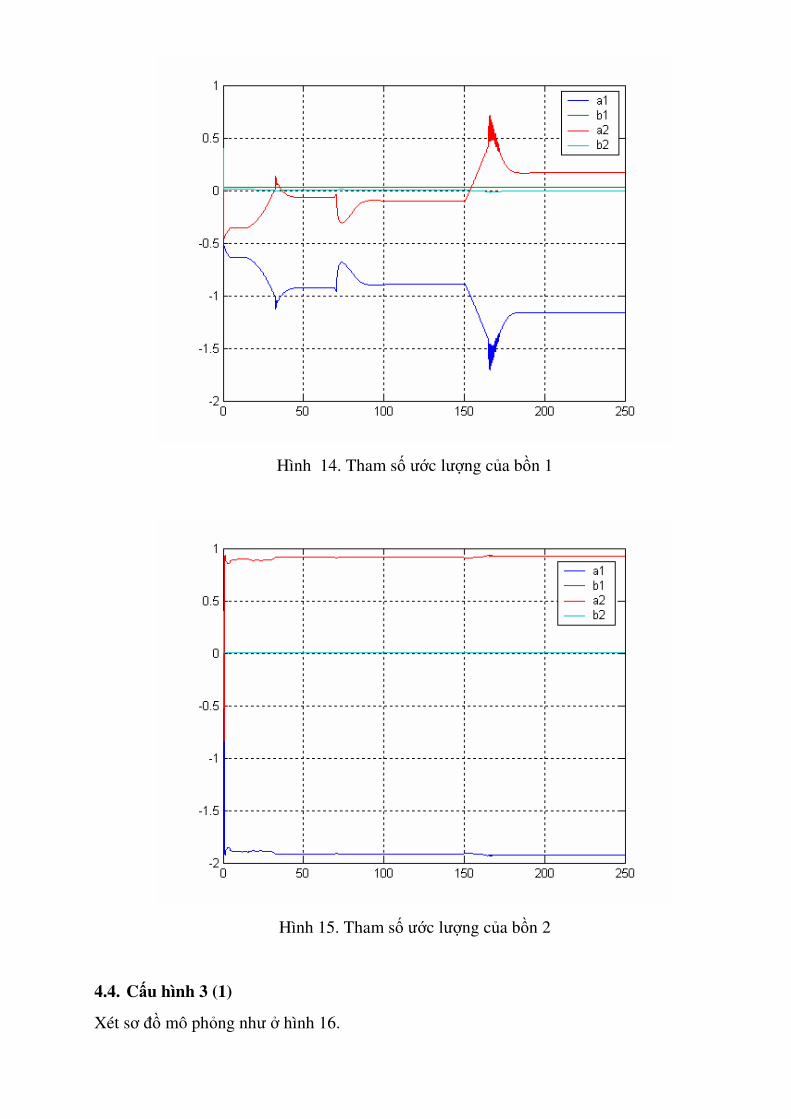
Hình 14. Tham số ước lượng của bồn 1
Hình 15. Tham số ước lượng của bồn 2
4.4. Cấu hình 3 (1)
Xét sơ đồ mô phỏng như ở hình 16.
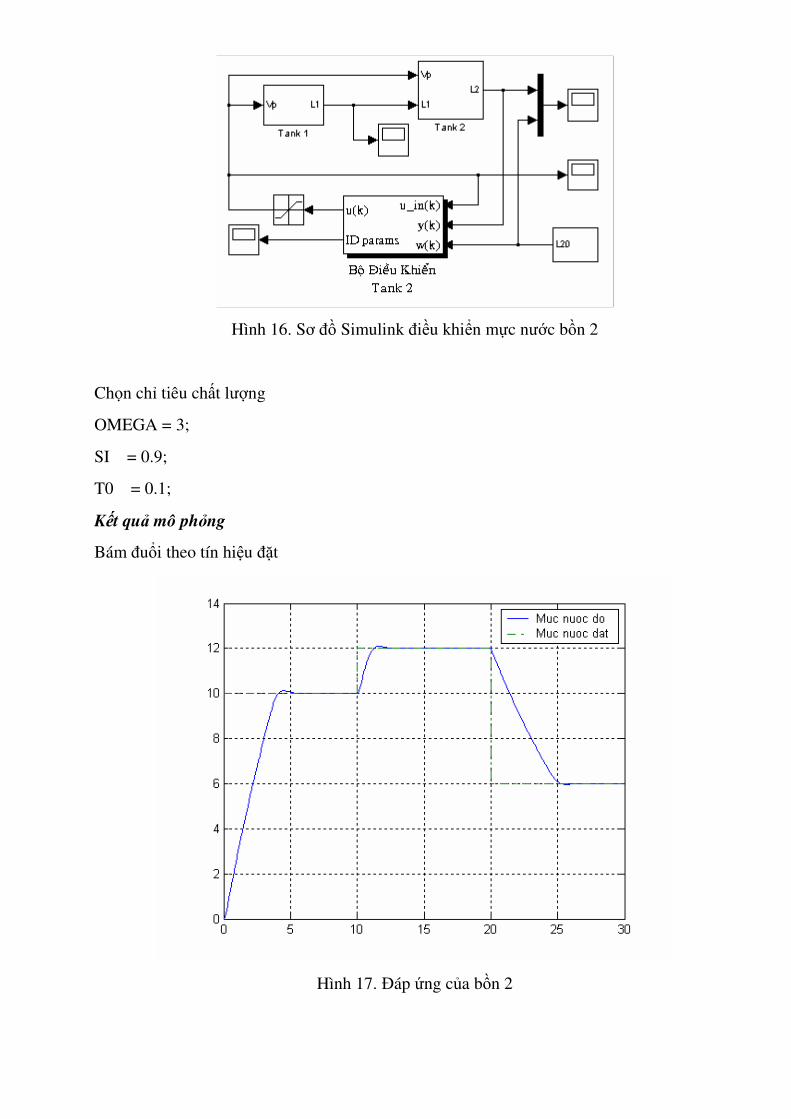
Hình 16. Sơ đồ Simulink điều khiển mực nước bồn 2
Chọn chỉ tiêu chất lượng
OMEGA = 3;
SI = 0.9;
T0 = 0.1;
Kết quả mô phỏng
Bám đuổi theo tín hiệu đặt
Hình 17. Đáp ứng của bồn 2
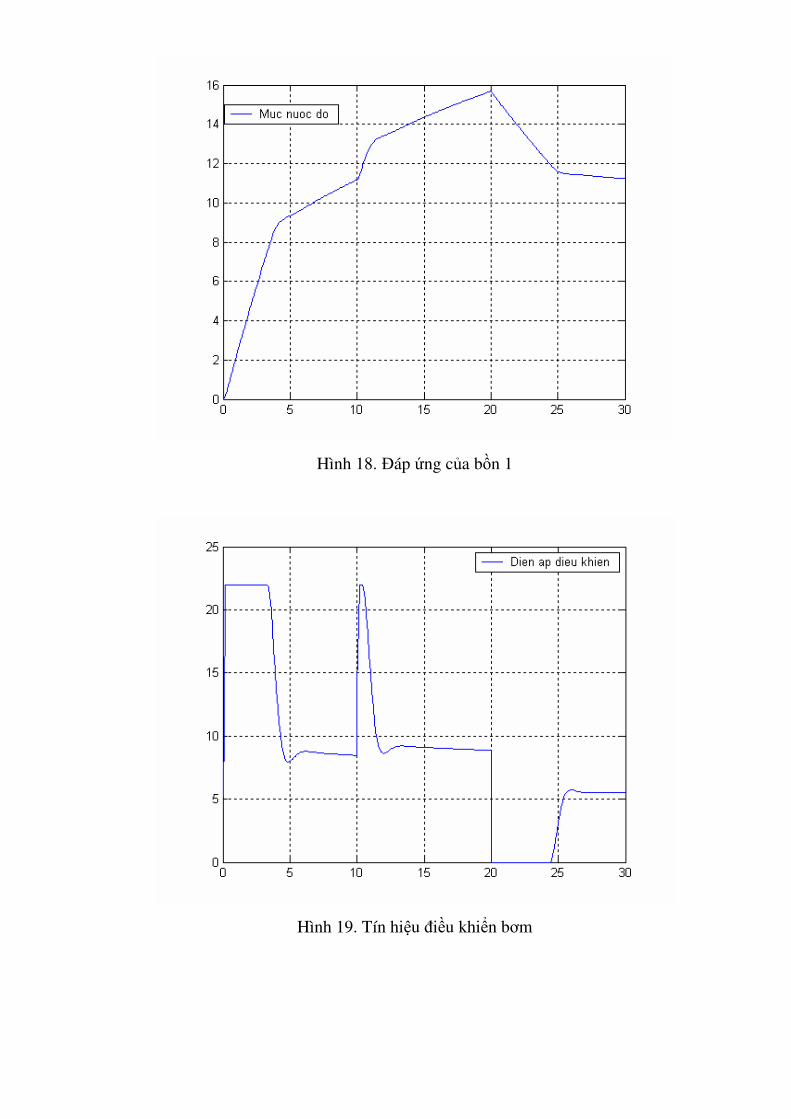
Hình 18. Đáp ứng của bồn 1
Hình 19. Tín hiệu điều khiển bơm
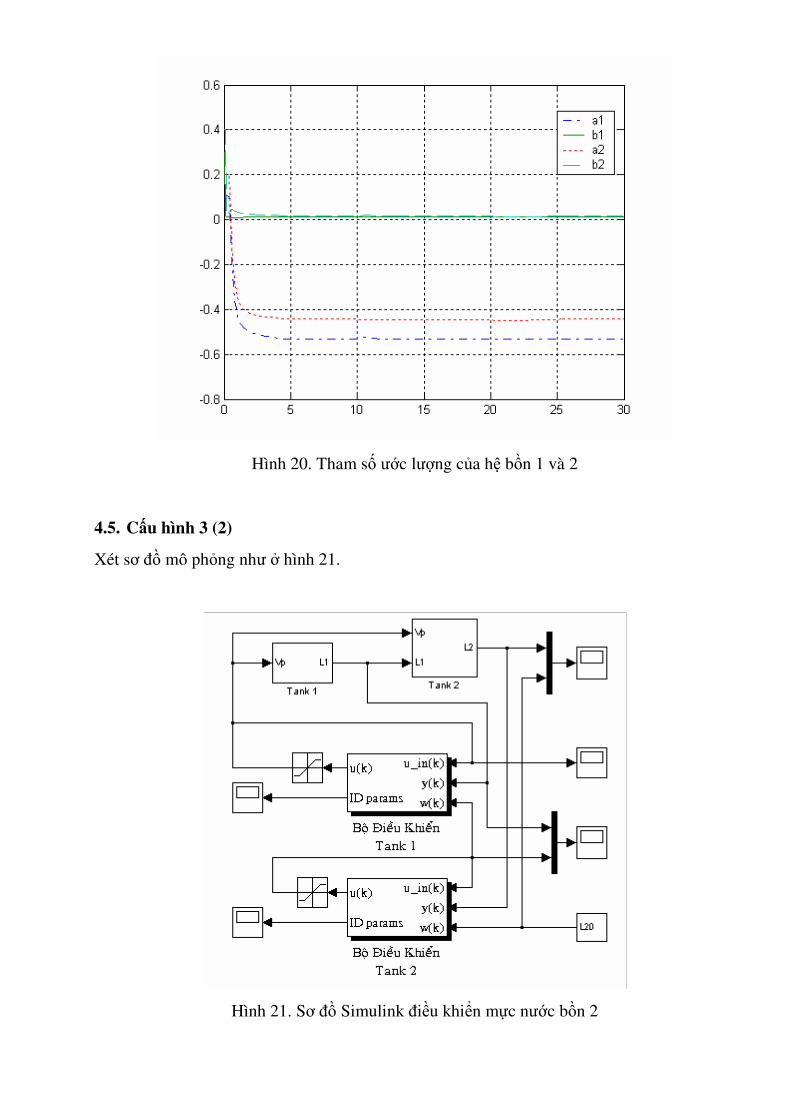
Hình 20. Tham số ước lượng của hệ bồn 1 và 2
4.5. Cấu hình 3 (2)
Xét sơ đồ mô phỏng như ở hình 21.
Hình 21. Sơ đồ Simulink điều khiển mực nước bồn 2
Chọn chỉ tiêu chất lượng
Bồn 1
OMEGA = 1.0;
SI = 0.9;
T0 = 0.1;
Bồn 2
OMEGA = 7;
SI = 0.707;
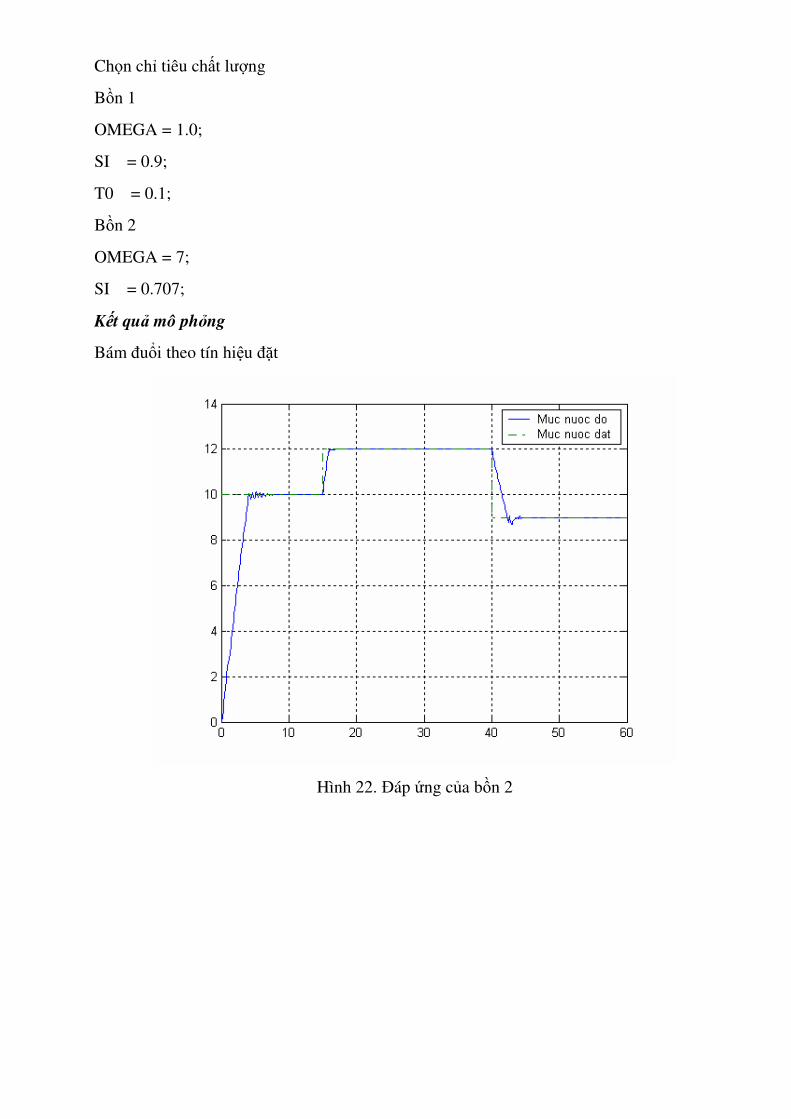
Kết quả mô phỏng
Bám đuổi theo tín hiệu đặt
Hình 22. Đáp ứng của bồn 2
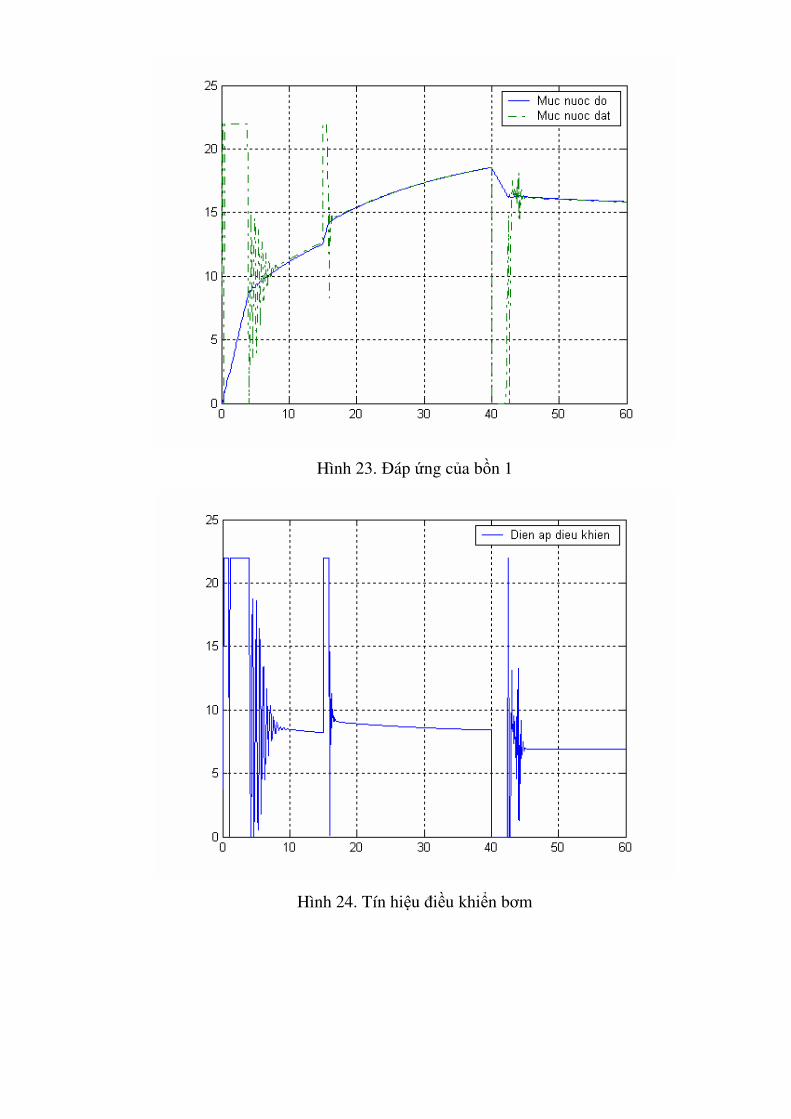
Hình 23. Đáp ứng của bồn 1
Hình 24. Tín hiệu điều khiển bơm
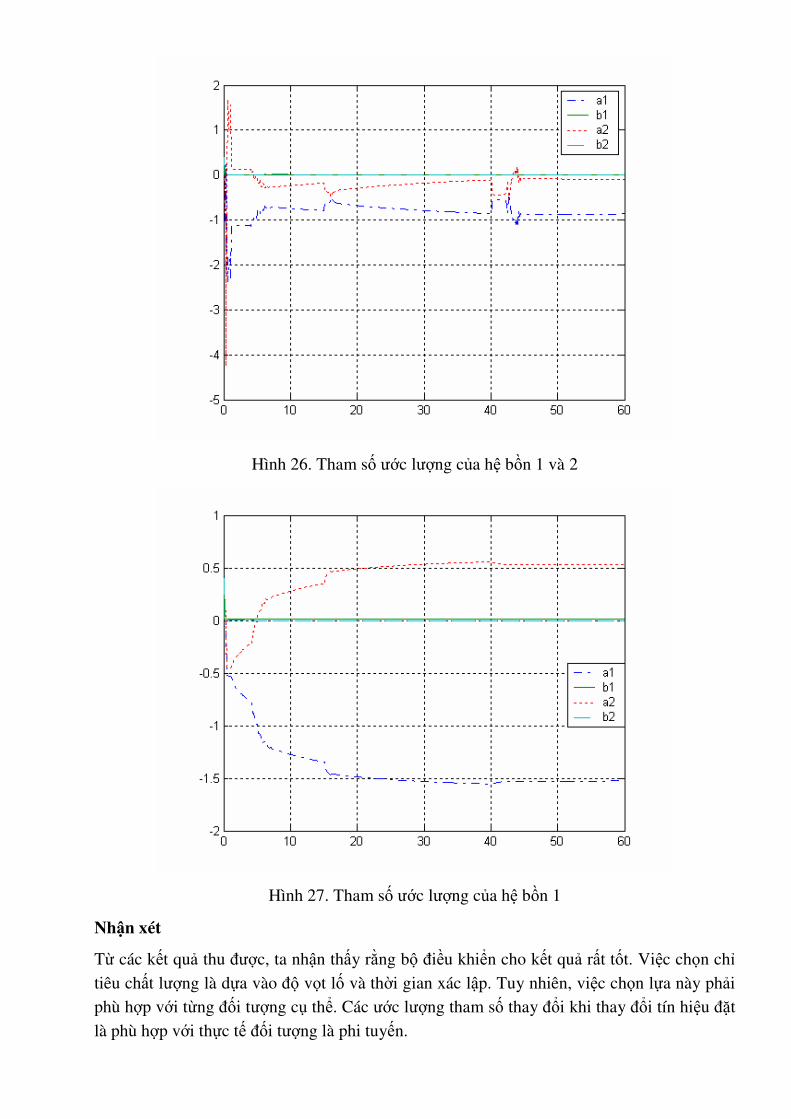
Hình 26. Tham số ước lượng của hệ bồn 1 và 2
Hình 27. Tham số ước lượng của hệ bồn 1
Nhận xét
Từ các kết quả thu được, ta nhận thấy rằng bộ điều khiển cho kết quả rất tốt. Việc chọn chỉ
tiêu chất lượng là dựa vào độ vọt lố và thời gian xác lập. Tuy nhiên, việc chọn lựa này phải
phù hợp với từng đối tượng cụ thể. Các ước lượng tham số thay đổi khi thay đổi tín hiệu đặt
là phù hợp với thực tế đối tượng là phi tuyến.


















