Embed Size (px)
Citation preview

Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 54 Politechniki Wrocławskiej Nr 54
Studia i Materiały Nr 23 2003
__________
Silnik indukcyjny, napęd bezczujnikowy, estymator prędkości sieci neuronowe wielowarstwowe, procesor sygnałowy
Teresa ORŁOWSKA-KOWALSKA*
NEURONOWE ESTYMATORY PRĘDKOŚCI SILNIKA INDUKCYJNEGO –STAN BADAŃ
W artykule przedstawiono wybrane wyniki badań prowadzonych w zakresie zastosowania sieci neuronowych do estymacji prędkości kątowej silnika indukcyjnego. Zaprezentowano dwie metody podejścia do tego zagadnienia, wykorzystujące odpowiednio metodę neuronowej identyfikacji ora modelowania neuronowego. Przeanalizowano różne struktury sieci wielowarstwowych i oceniono ich właściwości z punktu widzenia jakości odtwarzania prędkości i strumienia silnika indukcyjnego. Wzięto pod uwagę wpływ zmieniających się parametrów i obciążenia silnika. Sieci były trenowane zarówno na podstawie wyników uzyskanych z symulacji jak również na podstawie rzeczywistych próbek pochodzących z rejestracji przebiegów prądów i napięć fazowych silnika indukcyjnego. Przedstawiono również wyniki odtwarzania prędkości kątowej metodą neuronowego modelowania, opartą na koncepcji estymatora z modelem odniesienia. Klasyczną metodę porównano z nowym estymatorem neuronowym wykorzystującym ideę obserwatora stanu. Zaprezentowano przykładowe wyniki badań symulacyjnych oraz eksperymentalnych zrealizowanych przy wykorzystaniu procesora sygnałowego TMS320C31.
1. WPROWADZENIE
We współczesnych układach napędowych z silnikami indukcyjnymi coraz częściej wymagana jest regulacja prędkości kątowej w szerokich granicach, co wiąże się z koniecznością realizacji odpowiednich sprzężeń zwrotnych. Ostatnio obserwuje się tendencję do eliminacji czujników pomiarowych, w szczególności czujników wielkości mechanicznych i zastępowanie ich układami odtwarzającymi prędkość i/lub położenie na podstawie pomiarów wielkości elektrycznych, prądów i napięć uzwojeń stojana. W związku z tym, pojawiło się zainteresowanie rozwojem metod estymacji prędkości kątowej silnika indukcyjnego do zastosowań w tzw. bezczujnikowych układach napędowych [5], [13], [20]. Większość tych metod opiera się na modelach
* Politechnika Wrocławska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, 50-372 Wrocław, ul. Smoluchowskiego 19
matematycznych [5], [9], [20] lub nieliniowych zjawiskach zachodzących w silniku wskutek np. ekscentryczności wirnika lub innych zakłóceń [7]. Te ostatnie metody wymagają zastosowania specjalnych wirujących przyrządów lub cewek pomiarowych wewnątrz maszyn oraz dość skomplikowanych algorytmów obliczeniowych. Należą do grupy tzw. metod inwazyjnych, jednak najważniejszą ich zaletą jest odporność na zmiany parametrów silnika, spowodowane np. wzrostem temperatury uzwojeń. W odróżnieniu od nich, metody algorytmiczne oparte na znajomości modelu matematycznego silnika, charakteryzują się znaczną wrażliwością na zmiany wartości parametrów w wyniku wpływu czynników zewnętrznych [16] i dlatego wymagają dokładnej identyfikacji tych parametrów.
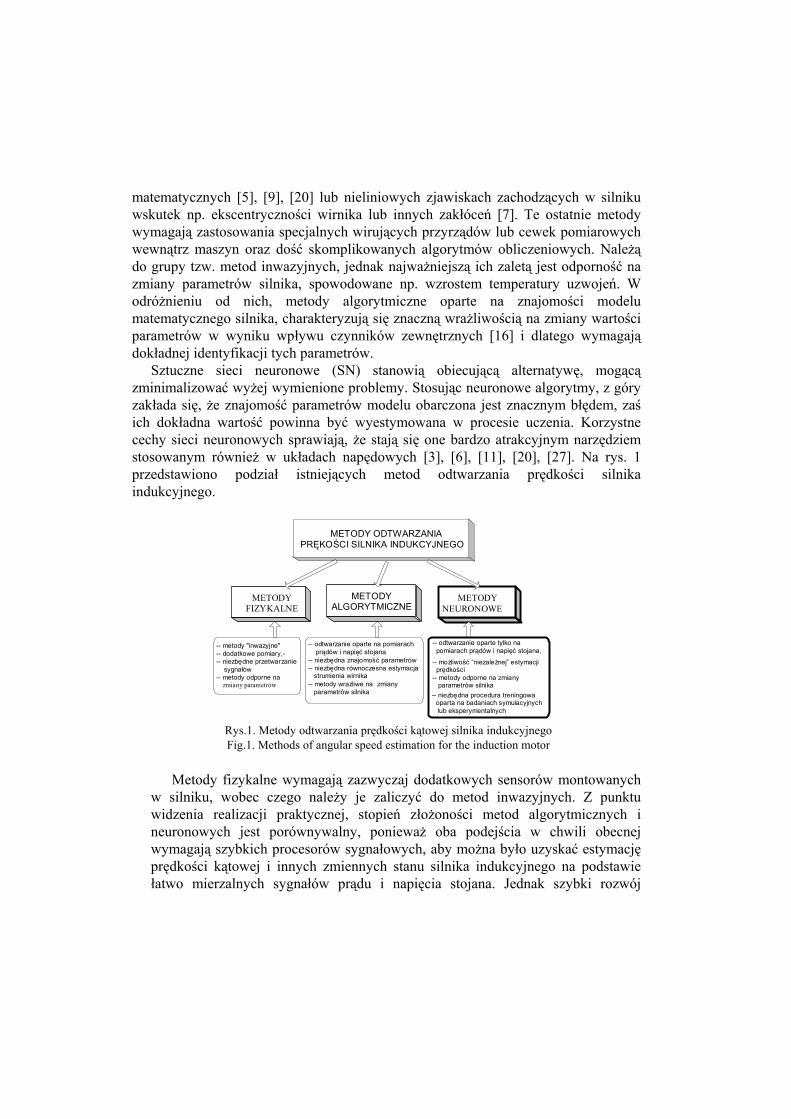
Sztuczne sieci neuronowe (SN) stanowią obiecującą alternatywę, mogącą zminimalizować wyżej wymienione problemy. Stosując neuronowe algorytmy, z góry zakłada się, że znajomość parametrów modelu obarczona jest znacznym błędem, zaś ich dokładna wartość powinna być wyestymowana w procesie uczenia. Korzystne cechy sieci neuronowych sprawiają, że stają się one bardzo atrakcyjnym narzędziem stosowanym również w układach napędowych [3], [6], [11], [20], [27]. Na rys. 1 przedstawiono podział istniejących metod odtwarzania prędkości silnika indukcyjnego.
METODY ODTWARZANIA
PRĘKOŚCI SILNIKA INDUKCYJNEGO
METODY ALGORYTMICZNE
METODY FIZYKALNE
METODY NEURONOWE
-- metody "inwazyjne" -- dodatkowe pomiary,- -- niezbędne przetwarzanie sygnałów -- metody odporne na zmiany parametrów
-- odtwarzanie oparte na pomiarach prądów i napięć stojana -- niezbędna znajomość parametrów-- niezbędna równoczesna estymacja strumienia wirnika -- metody wrażliwe na zmiany parametrów silnika
-- odtwarzanie oparte tylko na pomiarach prądów i napięć stojana,
-- możliwość “niezależnej” estymacji prędkości -- metody odporne na zmiany parametrów silnika-- niezbędna procedura treningowa
oparta na badaniach symulacyjnych lub eksperymentalnych
Rys.1. Metody odtwarzania prędkości kątowej silnika indukcyjnego Fig.1. Methods of angular speed estimation for the induction motor
Metody fizykalne wymagają zazwyczaj dodatkowych sensorów montowanych
w silniku, wobec czego należy je zaliczyć do metod inwazyjnych. Z punktu widzenia realizacji praktycznej, stopień złożoności metod algorytmicznych i neuronowych jest porównywalny, ponieważ oba podejścia w chwili obecnej wymagają szybkich procesorów sygnałowych, aby można było uzyskać estymację prędkości kątowej i innych zmiennych stanu silnika indukcyjnego na podstawie łatwo mierzalnych sygnałów prądu i napięcia stojana. Jednak szybki rozwój
układów wysokiej skali integracji rokuje nadzieję na pojawienie się w niedługim czasie mikroukładów specjalnie dedykowanych do realizacji sieci neuronowych, które umożliwią wykorzystanie naturalnych właściwości sieci neuronowych związanych z przetwarzaniem równoległym, a tym samym znacznie przyspieszą operacje przetwarzania sygnałów związane z estymacją zmiennych stanu silników indukcyjnych i spowodują, że metody neuronowe odtwarzania prędkości kątowej będą bardziej konkurencyjne w stosunku do innych.
2. RODZAJE SIECI NEURONOWYCH STOSOWANE DO ESTYMACJI PRĘDKOŚCI KĄTOWEJ SILNIKÓW INDUKCYJNYCH
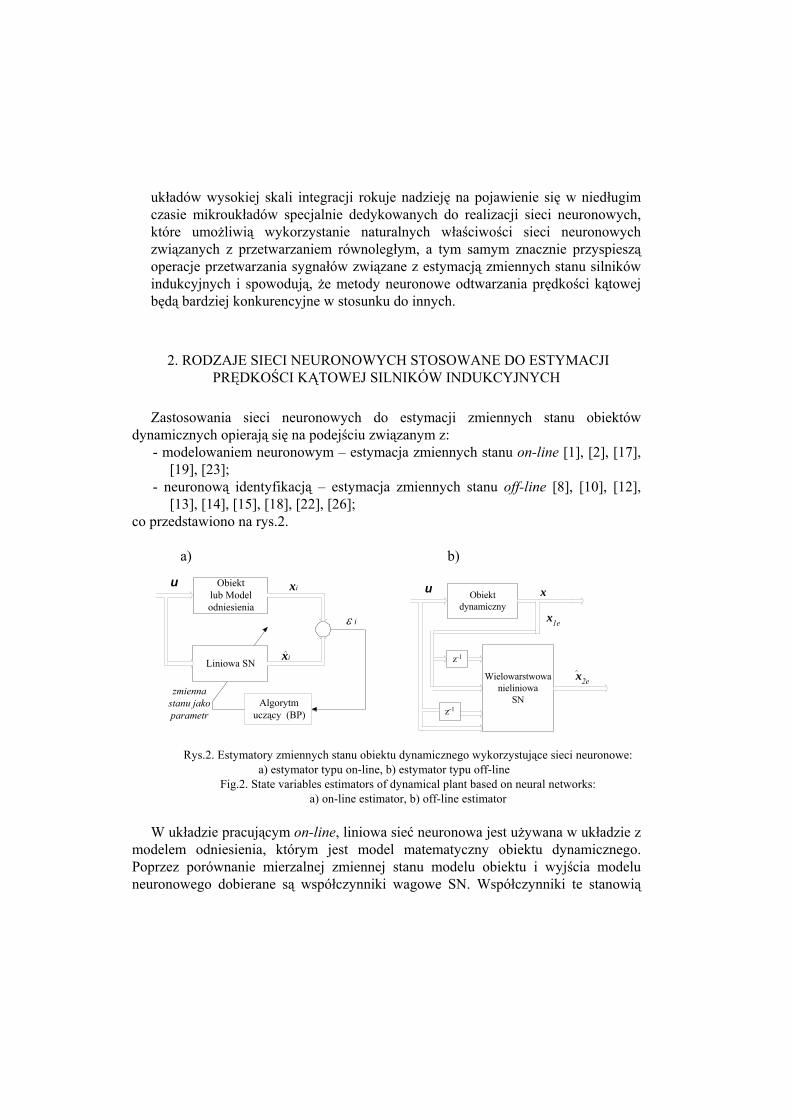
Zastosowania sieci neuronowych do estymacji zmiennych stanu obiektów dynamicznych opierają się na podejściu związanym z:
- modelowaniem neuronowym – estymacja zmiennych stanu on-line [1], [2], [17], [19], [23];
- neuronową identyfikacją – estymacja zmiennych stanu off-line [8], [10], [12], [13], [14], [15], [18], [22], [26];
co przedstawiono na rys.2. a) b)
Obiektlub Modelodniesienia
ε i
Liniowa SN
u
Algorytmuczący (BP)
xi
xi
∧
zmiennastanu jakoparametr
Obiektdynamiczny
Wielowarstwowanieliniowa
SN
u
x2e
x
∧
x1e
z-1
z-1
Rys.2. Estymatory zmiennych stanu obiektu dynamicznego wykorzystujące sieci neuronowe: a) estymator typu on-line, b) estymator typu off-line
Fig.2. State variables estimators of dynamical plant based on neural networks: a) on-line estimator, b) off-line estimator
W układzie pracującym on-line, liniowa sieć neuronowa jest używana w układzie z
modelem odniesienia, którym jest model matematyczny obiektu dynamicznego. Poprzez porównanie mierzalnej zmiennej stanu modelu obiektu i wyjścia modelu neuronowego dobierane są współczynniki wagowe SN. Współczynniki te stanowią
szukane parametry obiektu lub niemierzalną zmienną stanu, traktowaną w modelu neuronowym jako jeden z jego parametrów [1]. Szukana zmienna stanu lub parametr otrzymywane są na bieżąco, już w trakcie uczenia sieci, co stanowi istotną zaletę tego podejścia. Sieć neuronowa z liniową funkcją aktywacji i ze sprzężeniem zwrotnym jest stosowana w tym podejściu jako przestrajalny model adaptacyjny. Schemat ideowy takiego układu przedstawiono na rys.2a.
W podejściu off-line (rys.2b) zmienna stanu obiektu (w przypadku silnika - odtwarzany wektor niemierzalnych elektromagnetycznych zmiennych stanu ) jest uzyskiwana na wyjściu wielowarstwowej sieci neuronowej; na jej wejście są podawane łatwo mierzalne sygnały obiektu (x
e2x̂
1e), takie jak sygnały sterujące i łatwo mierzalne zmienne stanu opóźnione o jeden i więcej kroków i/lub ich przetworzone wartości:
(1) ( ) ( ) ( ) ( )[ T11 ... ,1,,1, −−= kkkk eei xxuux ]
przy czym w przypadku silnika indukcyjnego są to prądy i napięcia stojana. Stosuje się tu wielowarstwowe sieci neuronowe o neuronach z nieliniowymi
funkcjami aktywacji; zarówno sieci jednokierunkowe jak i sieci ze sprzężeniem zwrotnym [21]. Podejście to wymaga oddzielnej procedury uczenia (realizowanej off-line), ale za to, przy właściwym doborze wektorów uczących, sieć taka może być niewrażliwa na zmiany parametrów układu dynamicznego. Ze względu na fakt, że przy obecnym rozwoju techniki, złożone struktury sieci neuronowych mogą być realizowane tylko przy wykorzystaniu procesorów sygnałowych - co eliminuje podstawową zaletę sieci neuronowych, jaką jest przetwarzanie równoległe - stosowanie takich estymatorów zmiennych stanu silnika indukcyjnego jest ograniczone możliwościami realizacji praktycznej całego złożonego układu sterowania i odtwarzania w strukturze jednoprocesorowej.
W artykule przedstawiono wyniki badań związane z zastosowaniem obu metod do estymacji prędkości kątowej silnika indukcyjnego.
3. ZASTOSOWANIE SIECI NEURONOWYCH WIELOWARSTWOWYCH DO ESTYMACJI PRĘDKOŚCI SILNIKA INDUKCYJNEGO
3.1. WPROWADZENIE
Projektowanie i trenowanie SN wymaga znacznych nakładów czasu i zazwyczaj związane jest z przygotowywaniem zestawów treningowych zawierających znaczną liczbę danych. Jednak już w chwili obecnej istnieje szereg rodzajów programów specjalistycznych, które znacznie ułatwiają ten proces. Niestety, nie istnieją ściśle określone reguły pozwalające dokonać odpowiedniego wyboru ilości warstw ukrytych

lub optymalnej ilości neuronów w warstwach. Jeżeli ta liczba jest zbyt mała - błąd estymacji (w wybranej metodzie uczenia) nie osiągnie zadowalającego poziomu, natomiast w przypadku zbyt dużej ilości neuronów lub warstw - może wystąpić efekt tzw. przetrenowania sieci [21]. W związku z tym, w większości problemów technicznych trzeba poszukiwać odpowiedniej topologii sieci metodą kolejnych prób.
Publikacje spotykane w literaturze technicznej zawierają przykłady zastosowań szczególnych struktur SN w zastosowaniu do odtwarzania zmiennych stanu silnika indukcyjnego, ale brak jest badań porównawczych. Dlatego celem badań było porównanie możliwości różnych typów struktur SN wielowarstwowych, w zadaniach odtwarzania prędkości silnika indukcyjnego, przy możliwie minimalnej informacji wejściowej.
3.2. UOGÓLNIENIE SIECI LRGF
W ostatnich latach wielu badaczy eksperymentowało z wykorzystaniem różnych struktur sieci neuronowych, których budowę można sklasyfikować pomiędzy klasyczną siecią jednokierunkową, bazującą na perceptronie wielowarstwowym, a pełną strukturą rekurencyjną. Przegląd i ocena tych struktur, w zastosowaniu do estymacji szeregów czasowych (sygnałów mowy), została przedstawiona w pracy [25], a wnioski wynikające z tego przeglądu w odniesieniu do odtwarzania sygnałów zmiennych stanu silników elektrycznych zostały zawarte w pracach [8], [18]. Można określić ogólną postać struktury warstwy sieci neuronowej, nazywanej strukturą typu „Locally Recurrent Generally Feedforward” (sieć lokalnie rekurencyjna, globalnie jednokierunkowa), przedstawionej na rys.3.
∑x2
x1
xn
f(.) y(t)a(t)
G1
G2
Gn
H(z)
Rys.3. Uogólniona struktura sieci LRGF Fig.3. General structure of LRGF network
Uogólniona postać sieci LRGF ma taką strukturę jak uogólnienie klasycznej struktury neuronu McCulloch–Pitts’a z punktu widzenia wejścia–wyjścia. Zamiast stałej wartości współczynników wag, mamy tu do czynienia z blokami modelowanymi za pomocą liniowych funkcji przejścia. W dodatku sygnały sprzężeń zwrotnych mogą być przekształcane przez liniowe funkcje przejścia. Można więc wyróżnić trzy rodzaje struktur typu LRGF (Rys.3.): - sieć LRGF z lokalnym synapsowym sprzężeniem zwrotnym (”Local Synapse
Feedback”) – w tym przypadku architektura jest taka sama jak sieci jednokierunkowej, z tą różnicą, że stała wartość wagi jest zamieniana liniową funkcją przejścia;
- sieć LRGF z lokalnym sprzeżeniem wewnętrznym („Local Activation Feedback”) czyli ze sprzężeniem sprzed funkcji aktywacji. – w tym przypadku sygnał sprzężenia wprowadza elementy nieliniowe.
- sieć LRGF z lokalnym sprzężeniem zewnętrznym („Local Output Feedback”) - w tym przypadku głównym elementem architektury jest zewnętrzne sprzężenie zwrotne. Sprzężenie to może być bardzo proste - polegające na połączeniu sygnału z wyjścia na wejście poprzez jeden blok opóźniający, lub rozbudowane - zawierające zera i bieguny w funkcji przejścia. Szczególnym przypadkiem są synapsy o stałych współczynnikach wagowych.
Na podstawie badań przeprowadzonych w [25] w odniesieniu do szeregów czasowych oraz analizy szeregu innych prac z zakresu teorii SN, nie można określić z góry, która ze struktur LRGF będzie najlepsza w poszczególnych zastosowaniach do układów dynamicznych. Wymaga to każdorazowo szczegółowych badań. To stwierdzenie skłoniło do przetestowania różnych struktur sieci neuronowych w zastosowaniu do odtwarzania prędkości silnika indukcyjnego.
We wcześniejszych badaniach, do odtwarzania prędkości kątowej stosowano sieci neuronowe jednokierunkowe, sieci Elmana oraz sieci z zewnętrznym sprzężeniem zwrotnym, które na wejście miały podawane składowe wektora prądu stojana oraz ich przetworzone wartości, jak również inne dodatkowe sygnały [13] - [15]. Wyniki przedstawione w tamtych publikacjach wskazywały, że błąd odtwarzania prędkości (odniesiony do aktualnej prędkości silnika) był nie mniejszy niż 2%. Na podstawie wniosków wyciągniętych przez Back'a i Tsoi'ego [25] z badań nad uogólnionymi sieciami LRGF założono, iż mogą one dać pozytywne rezultaty w zastosowaniu do odtwarzania prędkości. W niniejszym podrozdziale przedstawiono przegląd różnych architektur sieci neuronowych wywodzących się z sieci LRGF i zachowanie się różnych struktur tzw. sieci kombinowanych w omówionym zastosowaniu.
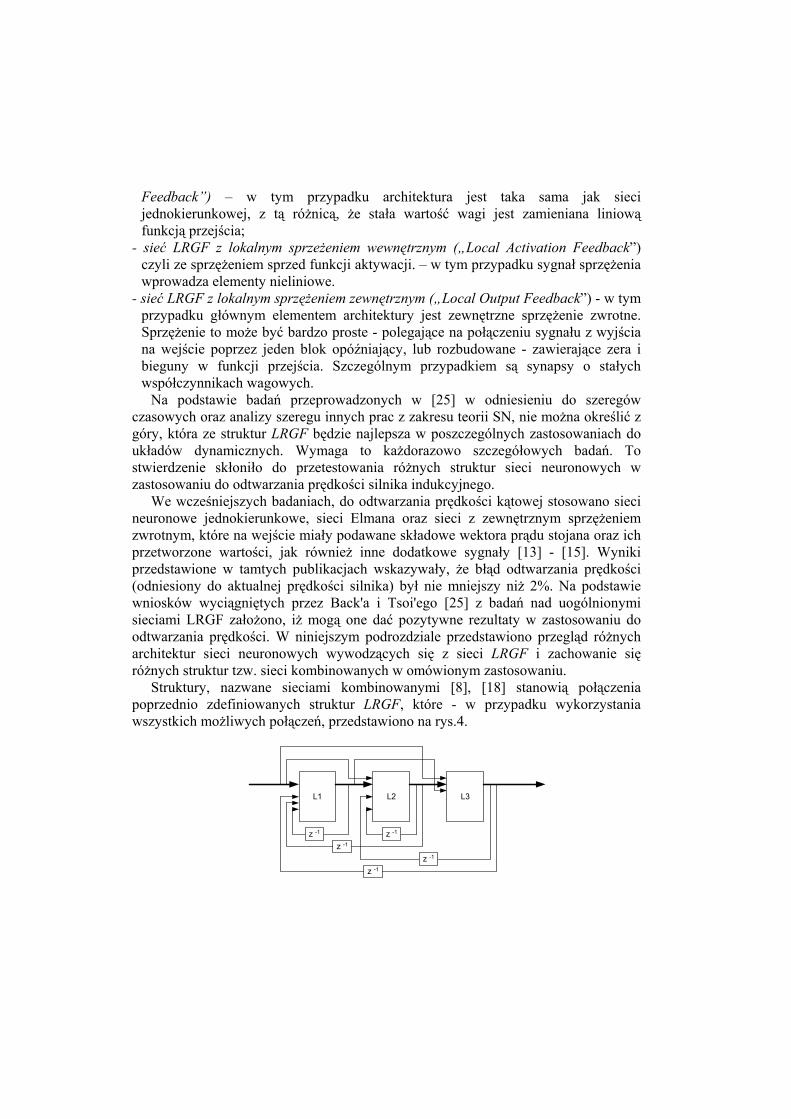
Struktury, nazwane sieciami kombinowanymi [8], [18] stanowią połączenia poprzednio zdefiniowanych struktur LRGF, które - w przypadku wykorzystania wszystkich możliwych połączeń, przedstawiono na rys.4.
L1 L2 L3
z -1 z -1
z -1z -1
z -1
Rys.4. Schemat sieci kombinowanej wykorzystującej wszystkie możliwe połączenia Fig.4. Scheme of the combined network with all possible connections
To ogólne podejście pozwala na wygenerowanie 256 kombinacji różnych połączeń, a wśród nich są następujące struktury sieci neuronowych: - sieć neuronowa jednokierunkowa, - sieć kaskadowa, - sieć z lokalnym sprzężeniem zwrotnym, - sieć ze sprzężeniami międzywarstwowymi, - sieć z wewnętrznymi sprzężeniami zwrotnymi (tzw. sieć Elmana), - sieć z zewnętrznym sprzężeniem zwrotnym.
Wszystkie wymienione wyżej struktury zostały przetestowane pod kątem możliwości odtwarzania zmiennych stanu SI na podstawie minimalnej informacji wejściowej, tzn. prądów fazowych stojana i ich przetworzonych wartości.
3.3. WYNIKI BADAŃ SYMULACYJNYCH
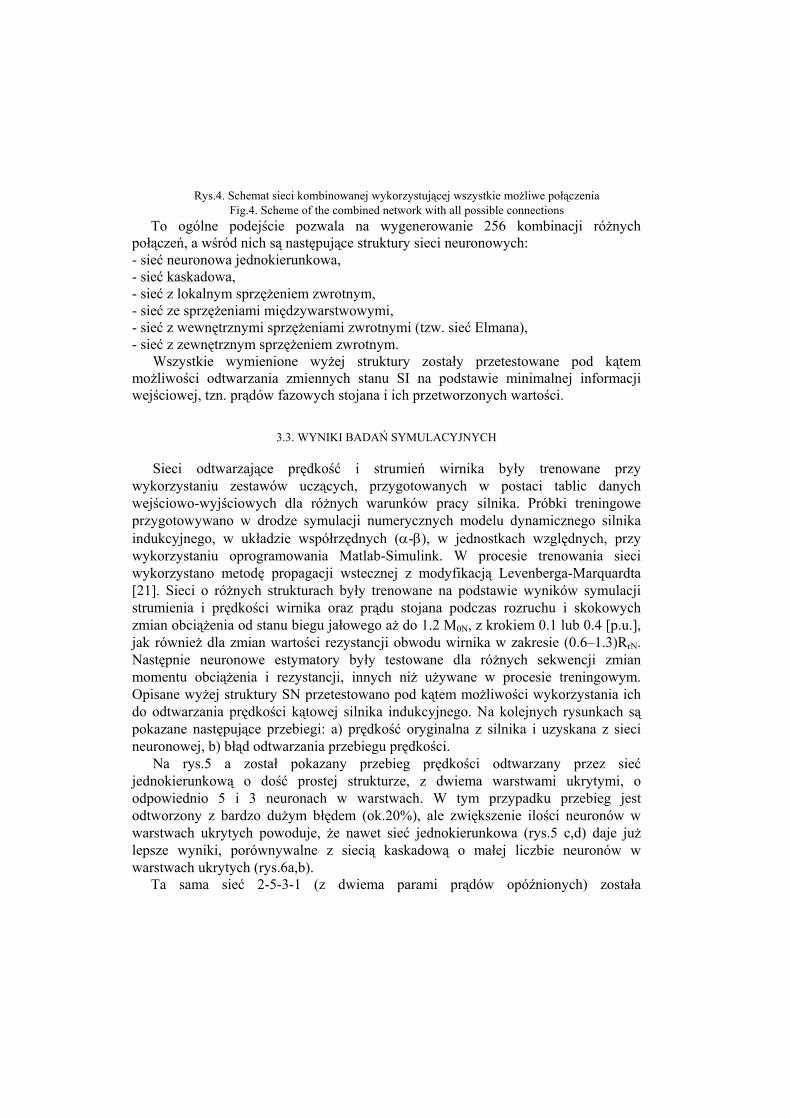
Sieci odtwarzające prędkość i strumień wirnika były trenowane przy wykorzystaniu zestawów uczących, przygotowanych w postaci tablic danych wejściowo-wyjściowych dla różnych warunków pracy silnika. Próbki treningowe przygotowywano w drodze symulacji numerycznych modelu dynamicznego silnika indukcyjnego, w układzie współrzędnych (α-β), w jednostkach względnych, przy wykorzystaniu oprogramowania Matlab-Simulink. W procesie trenowania sieci wykorzystano metodę propagacji wstecznej z modyfikacją Levenberga-Marquardta [21]. Sieci o różnych strukturach były trenowane na podstawie wyników symulacji strumienia i prędkości wirnika oraz prądu stojana podczas rozruchu i skokowych zmian obciążenia od stanu biegu jałowego aż do 1.2 M0N, z krokiem 0.1 lub 0.4 [p.u.], jak również dla zmian wartości rezystancji obwodu wirnika w zakresie (0.6–1.3)RrN. Następnie neuronowe estymatory były testowane dla różnych sekwencji zmian momentu obciążenia i rezystancji, innych niż używane w procesie treningowym. Opisane wyżej struktury SN przetestowano pod kątem możliwości wykorzystania ich do odtwarzania prędkości kątowej silnika indukcyjnego. Na kolejnych rysunkach są pokazane następujące przebiegi: a) prędkość oryginalna z silnika i uzyskana z sieci neuronowej, b) błąd odtwarzania przebiegu prędkości.
Na rys.5 a został pokazany przebieg prędkości odtwarzany przez sieć jednokierunkową o dość prostej strukturze, z dwiema warstwami ukrytymi, o odpowiednio 5 i 3 neuronach w warstwach. W tym przypadku przebieg jest odtworzony z bardzo dużym błędem (ok.20%), ale zwiększenie ilości neuronów w warstwach ukrytych powoduje, że nawet sieć jednokierunkowa (rys.5 c,d) daje już lepsze wyniki, porównywalne z siecią kaskadową o małej liczbie neuronów w warstwach ukrytych (rys.6a,b).
Ta sama sieć 2-5-3-1 (z dwiema parami prądów opóźnionych) została
przetestowana po wprowadzeniu sprzężenia międzywarstwowego pomiędzy warstwami pierwszą i drugą, ale otrzymane wyniki były do zaakceptowania tylko dla stanu ustalonego: w czasie rozruchu, jak i podczas zmian obciążenia, błąd odtwarzania przekraczał 6% (rys.6c,d). Podobny efekt uzyskano dla sieci z zewnętrznym sprzężeniem zwrotnym – sieci rekurencyjnej. Poprawne wyniki uzyskano dopiero po wprowadzeniu dodatkowego sygnału na wejście sieci, uzyskanego poprzez wstępne przetworzenie sygnałów wejściowych. Tym sygnałem był moduł prądu stojana, obliczany ze składowych wektora prądu stojana.
0 0 .1 0 . 2 0 . 30
0 . 2
0 . 4
0 . 6
0 . 8
1
t[ s ]
ω[ p u ]
a )
N N
M
0 0 . 1 0 .2 0 . 3
- 0 . 1
- 0 . 0 5
0
0 . 0 5
0 .1
0 . 1 5
t[ s ]
e ω[ p u ]
b )
0 0 .1 0 .2 0 .30
0 .2
0 .4
0 .6
0 .8
1
t [ s ]
ω [ p u ]
c )
N N
M
0 0 .1 0 . 2 0 .3
- 0 .1
- 0 .0 5
0
0 .0 5
0 .1
0 .1 5
t [ s ]
e ω[ p u ]
d )
Rys.5. Wyniki odtwarzania prędkości (a,c) oraz błąd odtwarzania εω (b,d) przez sieć jednokierunkową
2-5-3-1 z dwiema parami prądów opóźnionych na wejściu (a,b) oraz 2-10-5-1 z jedną parą prądów opóźnionych na wejściu (c,d)
Fig.5. Results of rotor speed estimation (a,c) and estimation error εω (b,d) for 2-5-3-1 feedforward net-work with two pairs of delayed currents in the input (a,b) and for 2-10-5-1 feedforward network with one
pair of delayed currents in the input (c,d)
0 0 .1 0 .2 0 .30
0 .2
0 .4
0 .6
0 .8
1
t [ s ]
ω [p u ]
a )
N N
M
0 0 .1 0 .2 0 .3
-0 .1
-0 .0 5
0
0 .0 5
0 .1
0 .1 5
t [ s ]
e ω[p u ]
b )
0 0 .1 0 .2 0 .30
0 .2
0 .4
0 .6
0 .8
1
t [s ]
ω [p u ]c )
N N
M
0 0 .1 0 .2 0 .3
- 0 .1
- 0 .0 5
0
0 .0 5
0 .1
0 .1 5
t [s ]
e ω[p u ]
d )
Rys.6. Wyniki odtwarzania prędkości (a,c) oraz błąd odtwarzania εω (b,d) przez kaskadową sieć 2-5-3-1,
z dwiema parami prądów opóźnionych na wejściu (a,b) oraz sieć 2-5-3-1 z połączeniami międzywarstwowymi, z dwiema parami prądów opóźnionych na wejściu
Fig.6. Results of rotor speed estimation (a,c) and estimation error εω (b,d) for 2-5-3-1 cascade network with two pairs of delayed currents in the input (a,b) and for 2-5-3-1 network with inter-layer
connections with two pairs of delayed currents in the input (c,d)
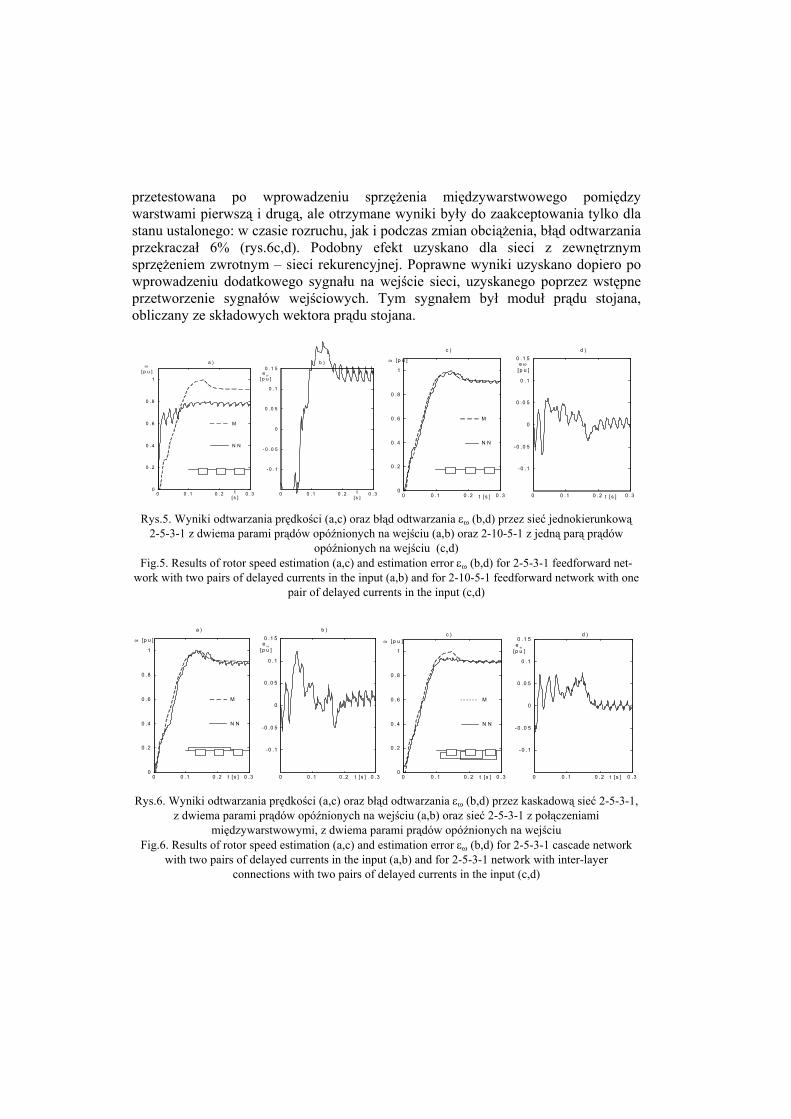
Wprowadzenie przetworzonej wartości prądu poprawiło wyniki odtwarzania prędkości zarówno w przypadku sieci Elmana (rys.7a,b), jak również dla sieci neuronowej jednokierunkowej (rys.6c,d) z małą ilością neuronów w warstwach.
0 0 . 1 0 . 2 0 .30
0 .2
0 .4
0 .6
0 .8
1
t [ s ]
ω [ p u ]
a )
N N
M
0 0 . 1 0 . 2 0 .3
- 0 . 1
- 0 . 0 5
0
0 .0 5
0 .1
0 .1 5
t [ s ]
e ω[ p u ]
b )
0 0 .1 0 .2 0 .30
0 .2
0 .4
0 .6
0 .8
1
t [s ]
ω [p u ]
c )
N N
M
0 0 .1 0 .2 0 .3
-0 .1
-0 .0 5
0
0 .0 5
0 .1
0 .1 5
t [s ]
e ω[p u ]
d )
Rys.7. Wyniki odtwarzania prędkości (a,c) oraz błąd odtwarzania εω (b,d) przez sieć Elman’a 3-5-3-1
(a,b), oraz sieć jednokierunkową 3-5-3-1 (c,d), z dwiema parami prądów opóźnionych na wejściu oraz z dodatkowym sygnałem modułu prądu stojana
Fig.7. Results of rotor speed estimation (a,c) and estimation error εω (b,d) for Elman 3-5-3-1 network (a,b) and for 3-5-3-1 feedforward network (c,d) with two pairs of delayed currents
and additional current modulus signal in the input
Podobne wyniki otrzymano dla innych sieci o zwiększonej liczbie neuronów w warstwach ukrytych oraz o zwiększonej liczbie sygnałów opóźnionych na wejściu. Zauważono, że jeśli ilość neuronów w pierwszej warstwie ukrytej była większa od 10, a w drugiej – większa od 5, to jakość odtwarzania prędkości ulegała pogorszeniu. Były także testowane sieci neuronowe z dodatkowymi sygnałami w postaci przetworzonych składowych wektora prądu stojana, podawanymi na wejście sieci. Jednak uzyskiwane efekty były podobne do tych, kiedy na wejście podawano dodatkowo tylko moduł wektora prądu stojana.
Po przetestowaniu ponad 100 różnych struktur sieci neuronowych i porównaniu wyników odtwarzania prędkości przez te sieci, można sformułować następujące wnioski: - najmniejszy błąd odtwarzania prędkości uzyskano przy podawaniu na wejście sieci
dodatkowej informacji w postaci modułu i/lub kwadratów składowych wektora prądu stojana,
- najlepsze wyniki uzyskano w przypadku sieci z dwiema warstwami ukrytymi, zarówno jednkierunkowych, Elman’a jak i kaskadowych (ale tylko w przypadku połączenia pomiędzy wejściem i drugą warstwą ukrytą lub wyjściem),
- zwiększenie liczby prądów opóźnionych zwiększa dokładność odtwarzania prędkości.
Zostało także udowodnione, że skomplikowane przekształcenia sygnałów na wejściu sieci (złożone postaci funkcji przejścia G(z)) nie polepszają dokładności odtwarzania prędkości [8].
3.4. WYNIKI EKSPERYMENTALNE ODTWARZANIA PRĘDKOŚCI SILNIKA INDUKCYJNEGO
Badania eksperymentalne zostały przeprowadzone na stanowisku laboratoryjnym z procesorem sygnałowym, umożliwiającym: - zebranie próbek uczących do trenowania sieci, - testowanie neuronowych estymatorów w układzie zasilania silnika bezpośrednio z
sieci 50Hz, - testowanie neuronowych estymatorów przy zasilaniu silnika za pośrednictwem
falownika. Przebadano różne struktury SN, z różną liczbą warstw ukrytych i neuronów w
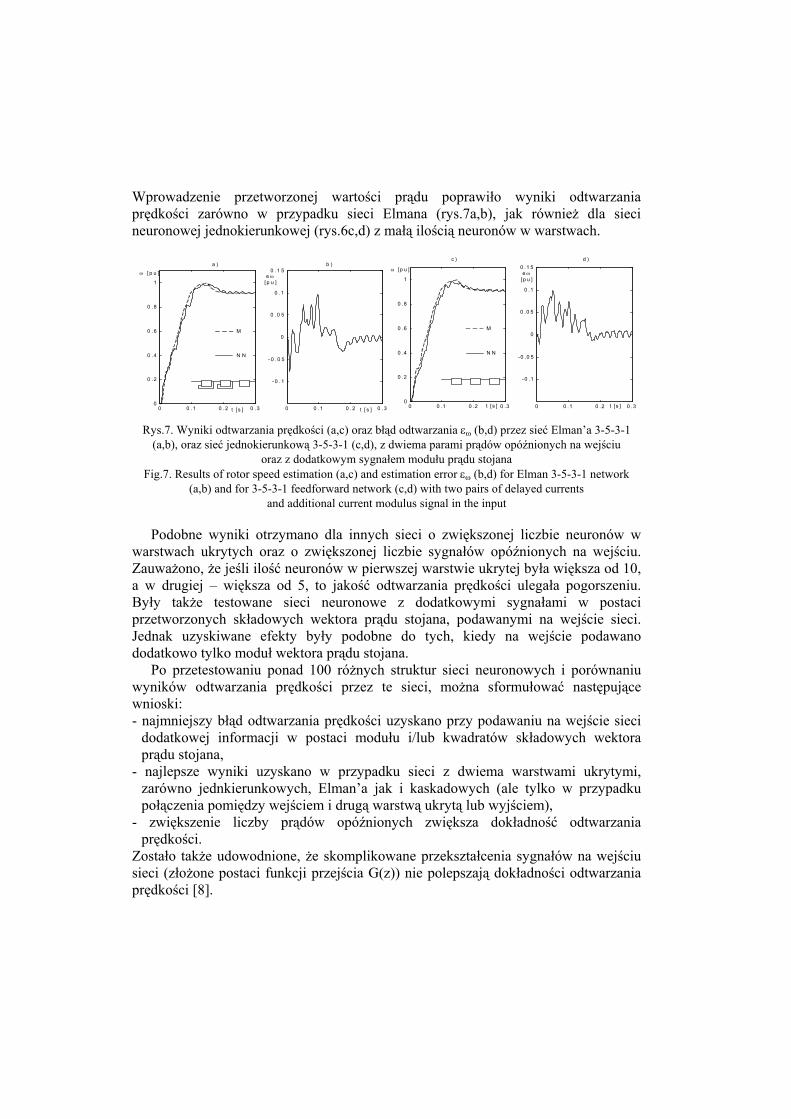
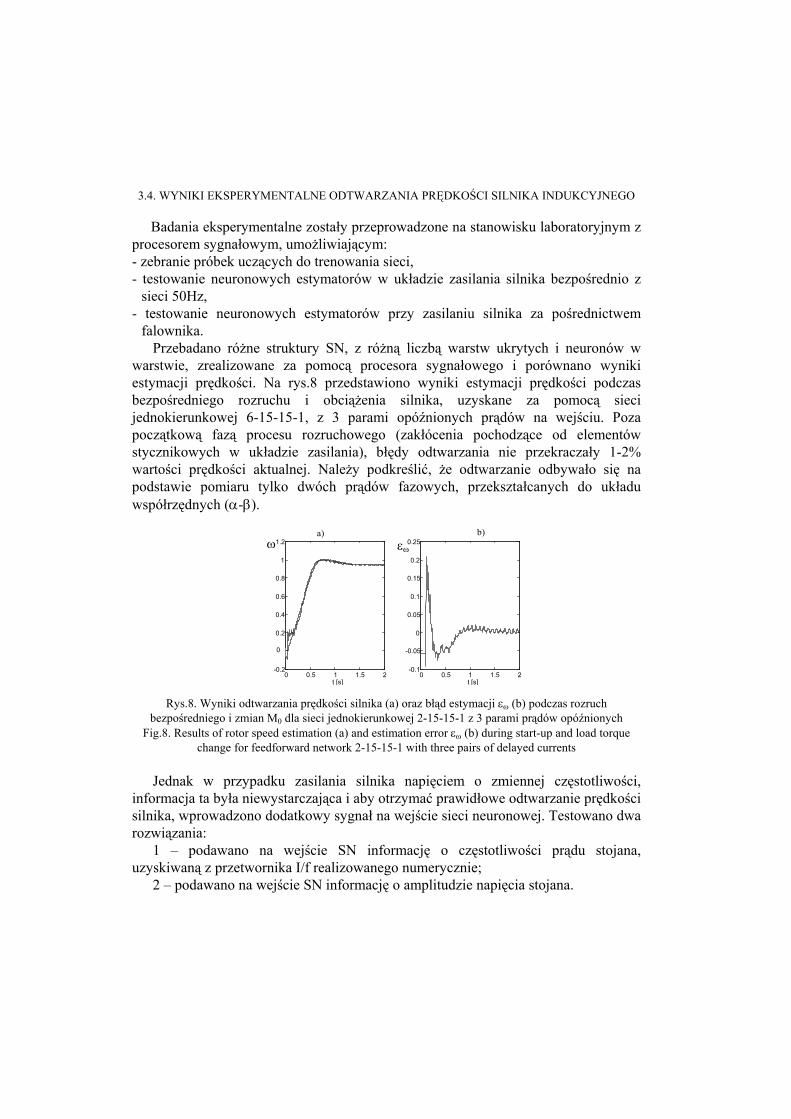
warstwie, zrealizowane za pomocą procesora sygnałowego i porównano wyniki estymacji prędkości. Na rys.8 przedstawiono wyniki estymacji prędkości podczas bezpośredniego rozruchu i obciążenia silnika, uzyskane za pomocą sieci jednokierunkowej 6-15-15-1, z 3 parami opóźnionych prądów na wejściu. Poza początkową fazą procesu rozruchowego (zakłócenia pochodzące od elementów stycznikowych w układzie zasilania), błędy odtwarzania nie przekraczały 1-2% wartości prędkości aktualnej. Należy podkreślić, że odtwarzanie odbywało się na podstawie pomiaru tylko dwóch prądów fazowych, przekształcanych do układu współrzędnych (α-β).
0 0.5 1 1.5 2-0.2
0.2
0.4
0.6
0.8
1
1.2
t [s]
εωω
0 0.5 1 1.5 2-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
t [s]
0
b)a)
Rys.8. Wyniki odtwarzania prędkości silnika (a) oraz błąd estymacji εω (b) podczas rozruch
bezpośredniego i zmian M0 dla sieci jednokierunkowej 2-15-15-1 z 3 parami prądów opóźnionych Fig.8. Results of rotor speed estimation (a) and estimation error εω (b) during start-up and load torque
change for feedforward network 2-15-15-1 with three pairs of delayed currents Jednak w przypadku zasilania silnika napięciem o zmiennej częstotliwości,
informacja ta była niewystarczająca i aby otrzymać prawidłowe odtwarzanie prędkości silnika, wprowadzono dodatkowy sygnał na wejście sieci neuronowej. Testowano dwa rozwiązania:
1 – podawano na wejście SN informację o częstotliwości prądu stojana, uzyskiwaną z przetwornika I/f realizowanego numerycznie;
2 – podawano na wejście SN informację o amplitudzie napięcia stojana.
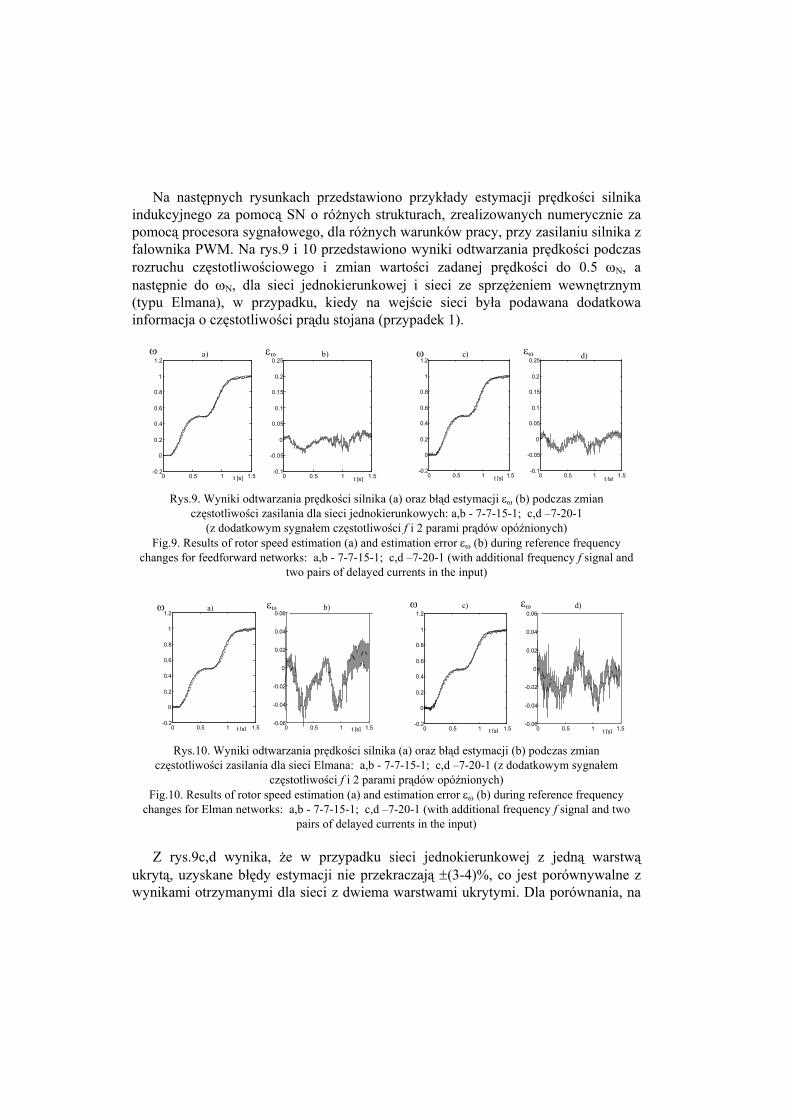
Na następnych rysunkach przedstawiono przykłady estymacji prędkości silnika indukcyjnego za pomocą SN o różnych strukturach, zrealizowanych numerycznie za pomocą procesora sygnałowego, dla różnych warunków pracy, przy zasilaniu silnika z falownika PWM. Na rys.9 i 10 przedstawiono wyniki odtwarzania prędkości podczas rozruchu częstotliwościowego i zmian wartości zadanej prędkości do 0.5 ωN, a następnie do ωN, dla sieci jednokierunkowej i sieci ze sprzężeniem wewnętrznym (typu Elmana), w przypadku, kiedy na wejście sieci była podawana dodatkowa informacja o częstotliwości prądu stojana (przypadek 1).
0 0.5 1 1.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s] 0 0.5 1 1.5-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
t [s]
εωω b)a)
0 0.5 1 1.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s] 0 0.5 1 1.5-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
t [s]
εωω d)c)
Rys.9. Wyniki odtwarzania prędkości silnika (a) oraz błąd estymacji εω (b) podczas zmian
częstotliwości zasilania dla sieci jednokierunkowych: a,b - 7-7-15-1; c,d –7-20-1 (z dodatkowym sygnałem częstotliwości f i 2 parami prądów opóźnionych)
Fig.9. Results of rotor speed estimation (a) and estimation error εω (b) during reference frequency changes for feedforward networks: a,b - 7-7-15-1; c,d –7-20-1 (with additional frequency f signal and
two pairs of delayed currents in the input)
0 0.5 1 1.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s] 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
t [s]
ω εω b)a)
0 0.5 1 1.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s] 0 0.5 1 1.5-0.06
-0.04
-0.02
0
0.02
0.04
0.06
t [s]
ω εω d)c)
Rys.10. Wyniki odtwarzania prędkości silnika (a) oraz błąd estymacji (b) podczas zmian
częstotliwości zasilania dla sieci Elmana: a,b - 7-7-15-1; c,d –7-20-1 (z dodatkowym sygnałem częstotliwości f i 2 parami prądów opóźnionych)
Fig.10. Results of rotor speed estimation (a) and estimation error εω (b) during reference frequency changes for Elman networks: a,b - 7-7-15-1; c,d –7-20-1 (with additional frequency f signal and two
pairs of delayed currents in the input)
Z rys.9c,d wynika, że w przypadku sieci jednokierunkowej z jedną warstwą ukrytą, uzyskane błędy estymacji nie przekraczają ±(3-4)%, co jest porównywalne z wynikami otrzymanymi dla sieci z dwiema warstwami ukrytymi. Dla porównania, na
rys.10 przedstawiono wyniki uzyskane w przypadku zastosowania sieci Elmana, jedno- i dwuwarstwowej. Uzyskane wyniki są podobne pod względem dokładności odtwarzania. Wydaje się jednak, że w przypadku sieci ze sprzężeniem zwrotnym możliwe jest zastosowanie sieci o prostszej strukturze (mniej neuronów w warstwie).
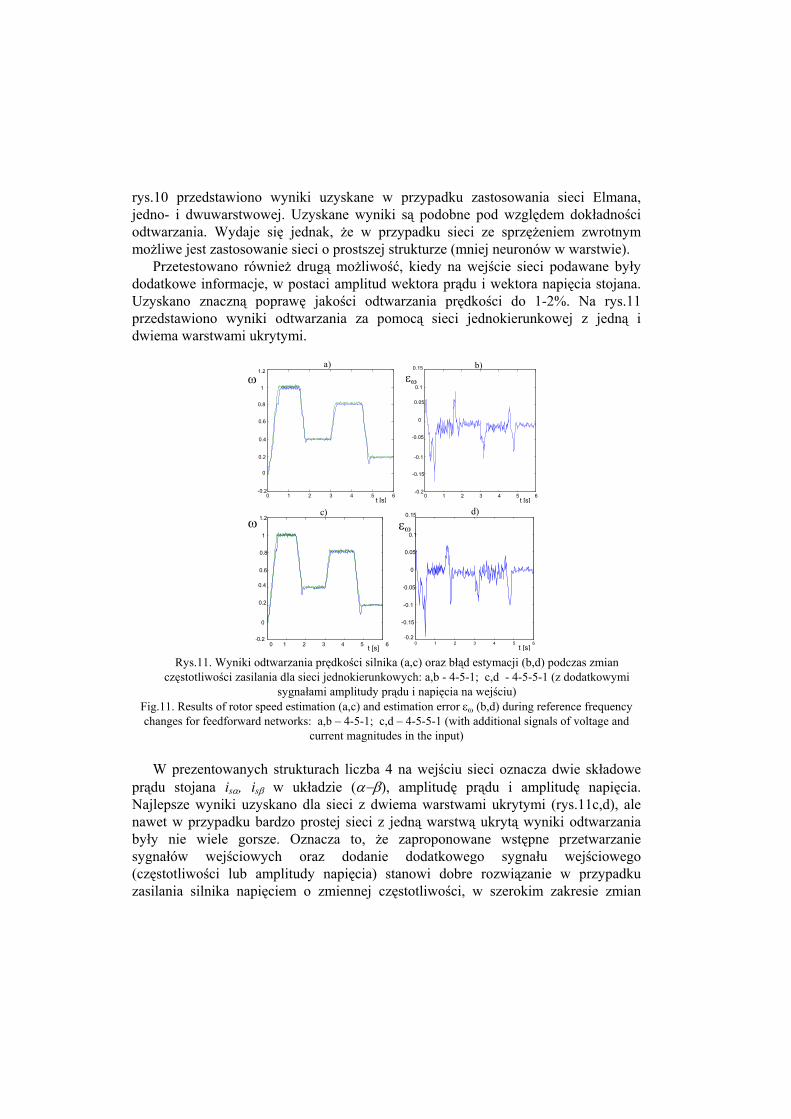
Przetestowano również drugą możliwość, kiedy na wejście sieci podawane były dodatkowe informacje, w postaci amplitud wektora prądu i wektora napięcia stojana. Uzyskano znaczną poprawę jakości odtwarzania prędkości do 1-2%. Na rys.11 przedstawiono wyniki odtwarzania za pomocą sieci jednokierunkowej z jedną i dwiema warstwami ukrytymi.
0 1 2 3 4 5 6-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s]
a)
ω
0 1 2 3 4 5 6 -0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
t [s]
εω
b)
0 1 2 3 4 5 6-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s]
c)ω
0 1 2 3 4 5 6-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
t [s]
εω
d)
Rys.11. Wyniki odtwarzania prędkości silnika (a,c) oraz błąd estymacji (b,d) podczas zmian
częstotliwości zasilania dla sieci jednokierunkowych: a,b - 4-5-1; c,d - 4-5-5-1 (z dodatkowymi sygnałami amplitudy prądu i napięcia na wejściu)
Fig.11. Results of rotor speed estimation (a,c) and estimation error εω (b,d) during reference frequency changes for feedforward networks: a,b – 4-5-1; c,d – 4-5-5-1 (with additional signals of voltage and
current magnitudes in the input) W prezentowanych strukturach liczba 4 na wejściu sieci oznacza dwie składowe
prądu stojana isα, isβ w układzie (α−β), amplitudę prądu i amplitudę napięcia. Najlepsze wyniki uzyskano dla sieci z dwiema warstwami ukrytymi (rys.11c,d), ale nawet w przypadku bardzo prostej sieci z jedną warstwą ukrytą wyniki odtwarzania były nie wiele gorsze. Oznacza to, że zaproponowane wstępne przetwarzanie sygnałów wejściowych oraz dodanie dodatkowego sygnału wejściowego (częstotliwości lub amplitudy napięcia) stanowi dobre rozwiązanie w przypadku zasilania silnika napięciem o zmiennej częstotliwości, w szerokim zakresie zmian

częstotliwości zadanej.
4. ESTYMATORY PRĘDKOŚCI WYKORZYSTUJĄCE METODĘ MODELOWANIA NEURONOWEGO
4.1. ESTYMATOR BEN-BRAHIMA [1]
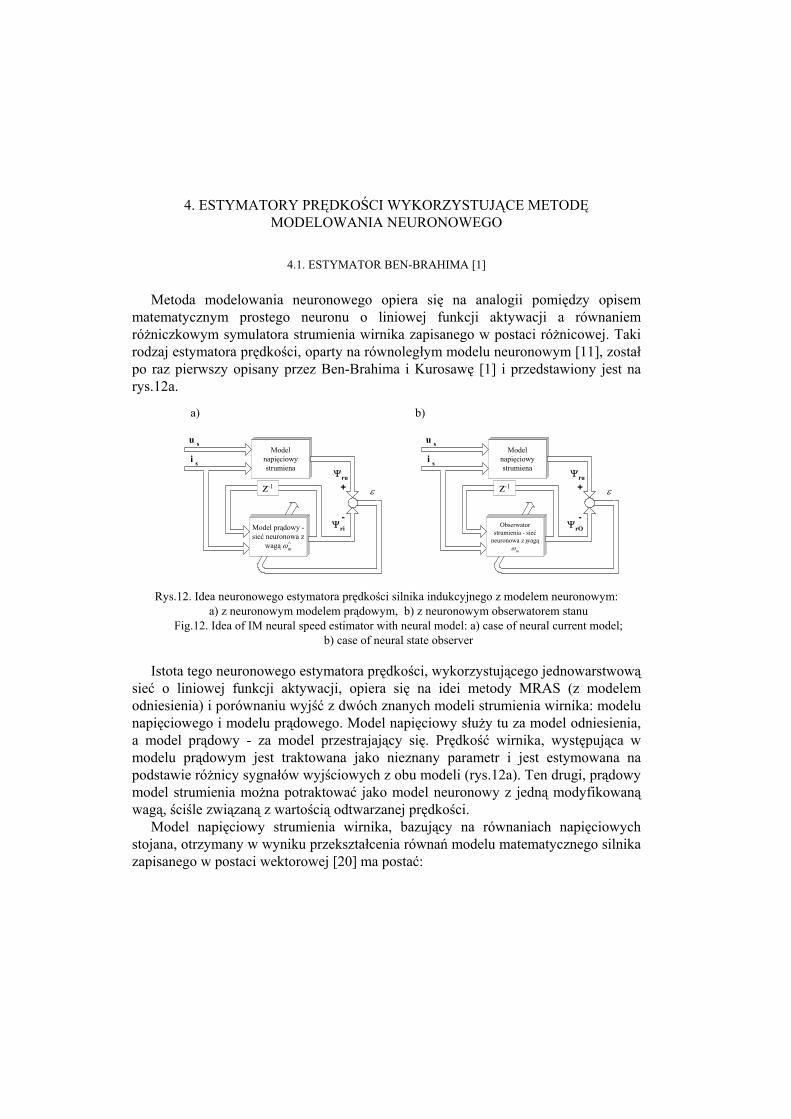
Metoda modelowania neuronowego opiera się na analogii pomiędzy opisem matematycznym prostego neuronu o liniowej funkcji aktywacji a równaniem różniczkowym symulatora strumienia wirnika zapisanego w postaci różnicowej. Taki rodzaj estymatora prędkości, oparty na równoległym modelu neuronowym [11], został po raz pierwszy opisany przez Ben-Brahima i Kurosawę [1] i przedstawiony jest na rys.12a.
a) b)
Modelnapięciowystrumiena
-
+
i s
u s
Model prądowy -sieć neuronowa z
wagą ωm^
Ψru
ε
Ψri
z-1
Modelnapięciowystrumiena
-
+
i s
u s
Obserwatorstrumienia - sieć
neuronowa z wagąωm
^
Ψru
ε
ΨrO
z-1
Rys.12. Idea neuronowego estymatora prędkości silnika indukcyjnego z modelem neuronowym:
a) z neuronowym modelem prądowym, b) z neuronowym obserwatorem stanu Fig.12. Idea of IM neural speed estimator with neural model: a) case of neural current model;
b) case of neural state observer
Istota tego neuronowego estymatora prędkości, wykorzystującego jednowarstwową sieć o liniowej funkcji aktywacji, opiera się na idei metody MRAS (z modelem odniesienia) i porównaniu wyjść z dwóch znanych modeli strumienia wirnika: modelu napięciowego i modelu prądowego. Model napięciowy służy tu za model odniesienia, a model prądowy - za model przestrajający się. Prędkość wirnika, występująca w modelu prądowym jest traktowana jako nieznany parametr i jest estymowana na podstawie różnicy sygnałów wyjściowych z obu modeli (rys.12a). Ten drugi, prądowy model strumienia można potraktować jako model neuronowy z jedną modyfikowaną wagą, ściśle związaną z wartością odtwarzanej prędkości.
Model napięciowy strumienia wirnika, bazujący na równaniach napięciowych stojana, otrzymany w wyniku przekształcenia równań modelu matematycznego silnika zapisanego w postaci wektorowej [20] ma postać:

N
NssM
rur Ttd
dTxr
xx
tdd 1
⎟⎠
⎞⎜⎝
⎛ −−= sss
iiuΨ σ (2)
oraz odpowiednio model prądowy strumienia wirnika:
( )N
irm
irM
r
rir T
jxxr
tdd 1 ⎥
⎦
⎤⎢⎣
⎡+−= ΨΨiΨ s ω . (3)
Model prądowy można zapisać w następujący sposób dla potrzeb modelowania neuronowego:
( ) ( ) ( ) ( )11ˆ ˆ321 −+−Ψ+=Ψ kwkwwk s
ir
ir iJI (4)
gdzie: I . J=⎡
⎣⎢
⎤
⎦⎥ =
−⎡
⎣⎢
⎤
⎦⎥
1 00 1
0 11 0
,
Model (4) przekształcony do układu współrzędnych (α,β), można potraktować jako połączenie dwóch neuronów o liniowej funkcji aktywacji każdy. Jednym ze współczynników wagowych tych neuronów – w2, jest prędkość silnika, która może być uzyskana w wyniku zastosowania algorytmu wstecznej propagacji błędu ε:
( ) ( ) ( )kwkwkw 222 1 ∆+−= η (5)
gdzie:
( ) ( ) ( )
( )( ) ( ) ( )( )2
2
22
21
21
1 1
kˆkˆke;kˆ
,kwkˆkw
i
r
u
ri
r
i
r
ΨΨEΨ
EΨJ
−===
−∆+−−=∆
∂∂δ
αδη
, (6)
η - współczynnik uczenia, α - współczynnik momentum. W wyniku wykorzystania dwóch składowych (α-β) wektora strumienia wirnika,
algorytm wstecznej propagacji modyfikujący wagę w2 (ωm) przyjmuje postać:
[ ] [ ] ( )[ ] [ ]111 −∆+−Ψ+Ψ−−−= kakeekk mir
irmm ωηωω αββα (7)
gdzie: . )()()(,
)( ir
ur
ir
ur ee βββααα ψψψψ −=−=
Neuronowy estymator prędkości z rys.14a bazuje na pomiarze prądów i napięć uzwojenia stojana oraz informacji o parametrach schematu zastępczego silnika.
Pracuje on poprawnie w przypadku przyjęcia znamionowych parametrów silnika w obu modelach wykorzystywanych strukturze typu MRAS [24]. Jednak, modele matematyczne (2) i (3) są wrażliwe na zmiany parametrów schematu zastępczego silnika, tak jak wszystkie symulatory strumienia wirnika silnika indukcyjnego [12], [20]. W przypadku, gdy neurony posiadają liniową funkcję aktywacji, trudno uznać taki estymator za rzeczywistą sieć neuronową, wraz z jej podstawowa właściwością związaną z odpornością na zmiany parametrów obiektu, nabytą w trakcie procesu uczenia. W związku z tym przebadano wrażliwość tego estymatora na zmiany parametrów schematu zastępczego silnika i stwierdzono, że błędy estymacji prędkości w przypadku przyjęcia niedokładnych wartości parametrów silnika w modelu napięciowym i modelu neuronowym (rys.12a), są znaczne [17]. Niektóre wyniki tych badań przedstawiono w punkcie 4.3.
4.2. NOWY ESTYMATOR PRĘDKOŚCI WYKORZYSTUJĄCY METODĘ MODELOWANIA NEURONOWEGO [19]
Aby zmniejszyć wrażliwość przedstawionego wyżej estymatora prędkości na błędy identyfikacji parametrów schematu zastępczego silnika, zamiast samonastrajającego się modelu prądowego strumienia wirnika, zastosowano obserwator stanu zredukowanego rzędu (rys.12b). Model matematyczny takiego obserwatora, szczegółowo opisanego w [9] oraz [20], ma postać następującą w przedziale próbkowania Ti prądów i napięć stojana, które stanowią wielkości wejściowe obserwatora:
( ) ( )uHyKzFz ii ωω ++=& , (8)
przy czym macierz stanu obserwatora jest specjalnej postaci:
( )i λdiag=F , (9)
gdzie λi - wartości własne obserwatora, stałe lub zmienne w funkcji prędkości kątowej. Elementy macierzy wagowej K i macierzy H dobiera się na podstawie zależności [9]:
( ) ( ) ( ) ( )( ) ( ) ,
,
ii
iiii
ωωωωωω
HBTCKTFAT
==−
(10)
gdzie: ω i - wartość prędkości w przedziale próbkowania prądów stojana, T (ω i ) – macierz transformacji wektora stanu układu spełniająca warunek:

( )xTz iω= . (11)
Estymaty zmiennych stanu wyznacza się zgodnie z teorią Luenbergera [20] w następujący sposób:
. (12) ( ) ( ) ( )zVyPzy
TC
x ii iωe
1ˆ ωω +=
−= ⎥⎦
⎤⎢⎣⎡
⎥⎦
⎤⎢⎣
⎡
Zastąpienie prądowego symulatora strumienia obserwatorem stanu jest korzystne, ponieważ w porównaniu z modelem prądowym (3), obserwator strumienia wirnika opisany równaniem (8)-(12) charakteryzuje się dużo większą odpornością na zmiany parametrów schematu zastępczego [9]. Model obserwatora, podobnie jak model prądowy strumienia, można potraktować jako prostą sieć neuronową, która posiada dwa neurony (w osi α i β) o liniowej funkcję aktywacji. Jedną z modyfikowanych wag tej sieci stanowi estymowana prędkość silnika. Tak więc, dla potrzeb modelowania neuronowego, model matematyczny obserwatora (8), (12), przyjmuje następującą postać:
( ) ( ) ( ) ( ) ( )1 1 1 321 −+−+−= kwkwkwk ss uizz λ (13)
( ) ( ) ( ) ( )( ) ( )1 1 1 ˆ1211 −−−−−=Ψ kkj tktkkr Siz . (14)
gdzie: w1 – w3 – współczynniki wagowe modelu neuronowego. Schemat blokowy takiego neuronowego estymatora prędkości przedstawiono na rys.12b, a algorytm dostrajania wagi przyjmuje w tym przypadku postać następującą:
[ ] [ ] ( )[ ] [ ]111 −∆+−Ψ+Ψ−−−= kkeekk mor
ormm ωαηωω αββα , (15)
gdzie: , or
ure ααα Ψ−Ψ=
. or
ure βββ Ψ−Ψ=
4.3. WPŁYW PARAMETRÓW SILNIKA INDUKCYJNEGO NA JAKOŚĆ ODTWARZANIA PRĘDKOŚCI SILNIKA INDUKCYJNEGO
Obydwa neuronowe estymatory prędkości, wykorzystujące koncepcje przedstawione na rys.12 zostały przetestowane w szerokim zakresie zmian prędkości i momentu obciążenia (jak na rys.13), w układzie częstotliwościowego sterowania
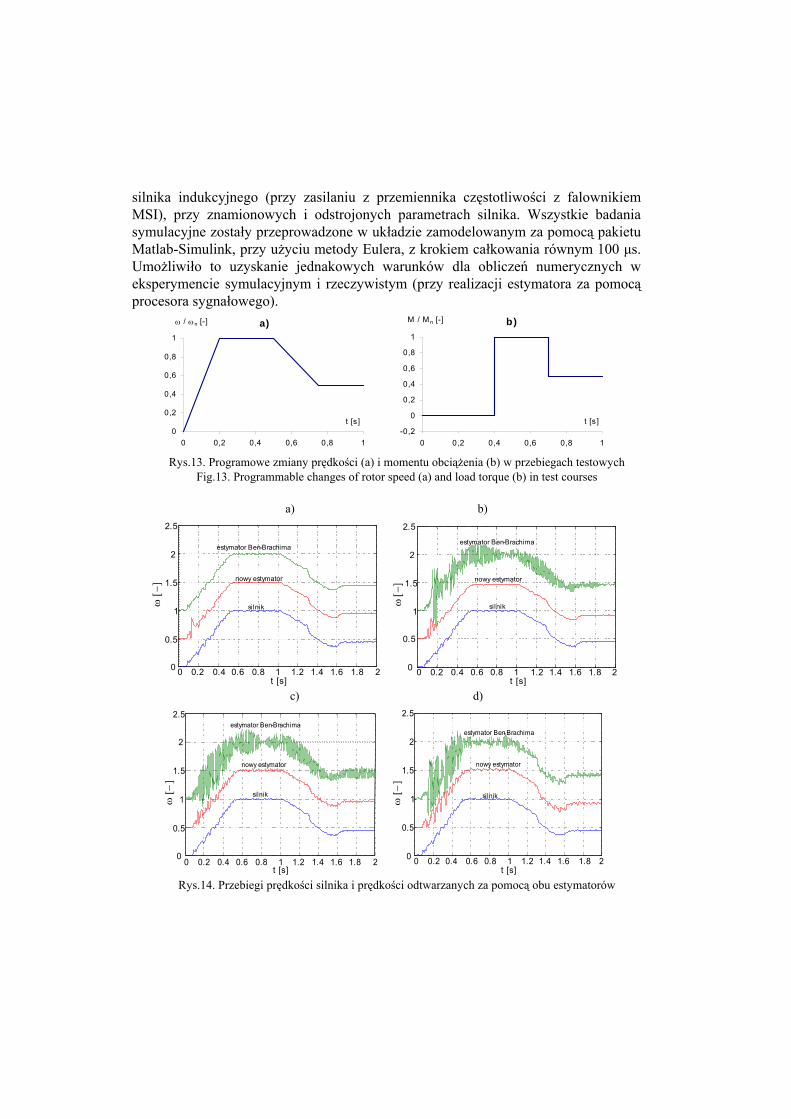
silnika indukcyjnego (przy zasilaniu z przemiennika częstotliwości z falownikiem MSI), przy znamionowych i odstrojonych parametrach silnika. Wszystkie badania symulacyjne zostały przeprowadzone w układzie zamodelowanym za pomocą pakietu Matlab-Simulink, przy użyciu metody Eulera, z krokiem całkowania równym 100 µs. Umożliwiło to uzyskanie jednakowych warunków dla obliczeń numerycznych w eksperymencie symulacyjnym i rzeczywistym (przy realizacji estymatora za pomocą procesora sygnałowego).
a)
0
0,2
0,4
0,6
0,8
1
0 0,2 0,4 0,6 0,8 1
t [s]
ω / ωn [-]
b)
-0,2
0
0,2
0,4
0,6
0,8
1
0 0,2 0,4 0,6 0,8 1
t [s]
M / Mn [-]
Rys.13. Programowe zmiany prędkości (a) i momentu obciążenia (b) w przebiegach testowych
Fig.13. Programmable changes of rotor speed (a) and load torque (b) in test courses
a) b)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
2.5
t [s]
estymator Ben-Brachima
nowy estymator
silnikω [
−]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
2.5
t [s]
estymator Ben-Brachima
silnik
nowy estymator
ω [
−]
c) d)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
2.5
t [s]
estymator Ben-Brachima
nowy estymator
silnik
ω [−
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
2.5
t [s]
estymator Ben-Brachima
nowy estymator
silnik
ω [−
]
Rys.14. Przebiegi prędkości silnika i prędkości odtwarzanych za pomocą obu estymatorów

przy: a) parametrach znamionowych, b) xM=1.5xMN , c) xσs=0.5xσsN, d) rr=1.5rrNFig.14. Transients of actual rotor speed and speed estimated by two observers: a) nominal motor
parameters, b) xM=1.5xMN , c) xσs=0.5xσsN, d) rr=1.5rrN
Wartości chwilowe oraz średnie błędy estymacji prędkości były obliczane dla zmian wszystkich parametrów. Okazało się, że odpowiedni dobór współczynników α i η umożliwia uzyskanie małej wrażliwości na zmiany parametrów silnika. Na rys.14 przedstawiono wybrane przebiegi prędkości porównujące właściwości obu estymatorów przy znamionowych parametrach oraz przy ich odstrojeniu od wartości znamionowych. Dla poprawy czytelności, poszczególne przebiegi prędkości zostały przesunięte względem siebie w osi pionowej o wartość 0.5[p.u.].
a) b)
0
10
20
30
40
50
0,85 0,9 0,95 1 1,05 1,1 1,15
Rs / RsN [-]
Err [%]Err_obs
Err_BB
0
5
10
15
0,4 0,6 0,8 1 1,2 1,4 1,6
Rr / RrN [-]
Err [%]Err_obs
Err_BB
c) d)
02468
10121416
0,15 0,65 1,15 1,65 2,15
Xσs / XσsN [-]
Err [%]Err_obs
Err_BB
0
2
4
6
8
10
0,15 0,65 1,15 1,65 2,15
Xσr / XσrN [-]
Err [%]Err_obs
Err_BB
e)
0
5
10
15
20
25
30
0,4 0,6 0,8 1 1,2 1,4 1,6 1,8
XM / XMN [-]
Err [%]Err_obs
Err_BB
Rys.15. Wpływ parametrów reaktancji silnika na średnie błędy odtwarzania prędkości przez estymatory
neuronowe: a) rezystancja stojana - rs, b) rezystancja wirnika - rr, c) reaktancja rozproszenia stojana - xσs, d) reaktancja rozproszenia wirnika - xσr, e) reaktancja magnesująca – xM
Fig.15. Influence of motor parameters to average estimation errors for neural estimators: a) stator resistance - rs, b) rotor resistance - rr, c) stator leakage reactance - xσs, d) rotor leakage
reactance - xσr, e) magnetizing reactance – xM
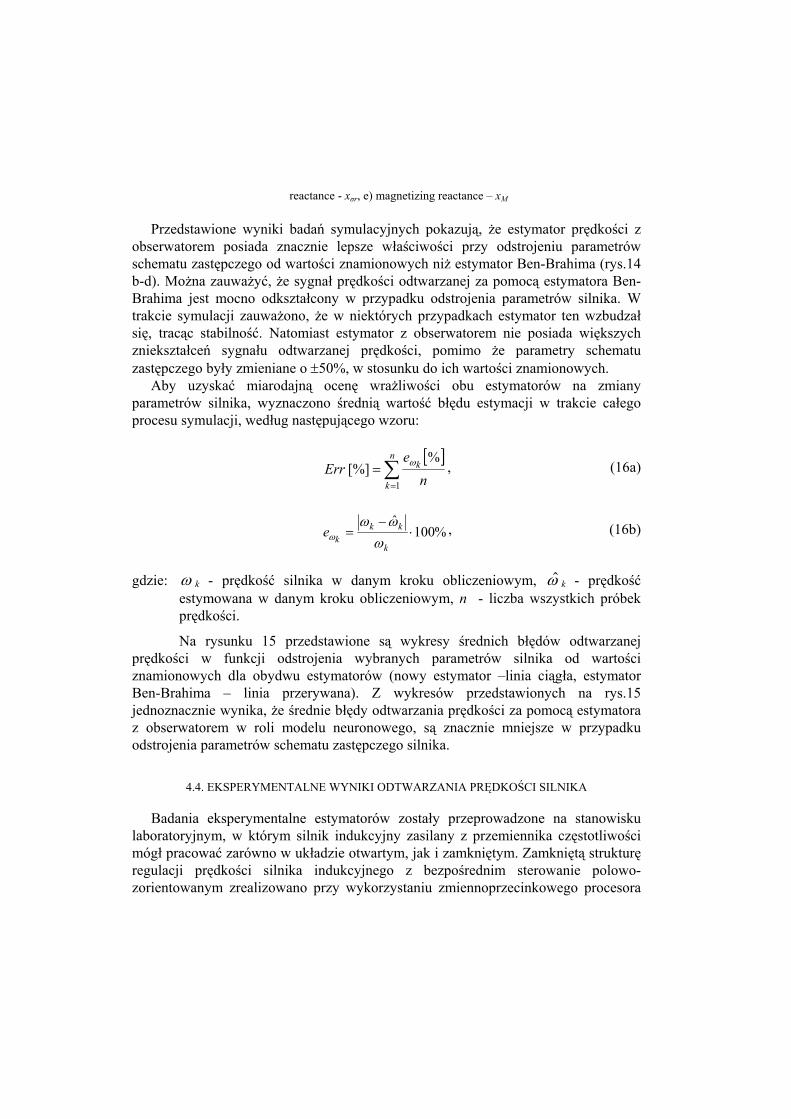
Przedstawione wyniki badań symulacyjnych pokazują, że estymator prędkości z
obserwatorem posiada znacznie lepsze właściwości przy odstrojeniu parametrów schematu zastępczego od wartości znamionowych niż estymator Ben-Brahima (rys.14 b-d). Można zauważyć, że sygnał prędkości odtwarzanej za pomocą estymatora Ben-Brahima jest mocno odkształcony w przypadku odstrojenia parametrów silnika. W trakcie symulacji zauważono, że w niektórych przypadkach estymator ten wzbudzał się, tracąc stabilność. Natomiast estymator z obserwatorem nie posiada większych zniekształceń sygnału odtwarzanej prędkości, pomimo że parametry schematu zastępczego były zmieniane o ±50%, w stosunku do ich wartości znamionowych.
Aby uzyskać miarodajną ocenę wrażliwości obu estymatorów na zmiany parametrów silnika, wyznaczono średnią wartość błędu estymacji w trakcie całego procesu symulacji, według następującego wzoru:
[ ]
∑=
=n
k
k
ne
Err1
%[%] ω , (16a)
%100ˆ
⋅−
=k
kkke
ωωω
ω , (16b)
gdzie: ω k - prędkość silnika w danym kroku obliczeniowym, $ω k - prędkość estymowana w danym kroku obliczeniowym, n - liczba wszystkich próbek prędkości.
Na rysunku 15 przedstawione są wykresy średnich błędów odtwarzanej prędkości w funkcji odstrojenia wybranych parametrów silnika od wartości znamionowych dla obydwu estymatorów (nowy estymator –linia ciągła, estymator Ben-Brahima – linia przerywana). Z wykresów przedstawionych na rys.15 jednoznacznie wynika, że średnie błędy odtwarzania prędkości za pomocą estymatora z obserwatorem w roli modelu neuronowego, są znacznie mniejsze w przypadku odstrojenia parametrów schematu zastępczego silnika.
4.4. EKSPERYMENTALNE WYNIKI ODTWARZANIA PRĘDKOŚCI SILNIKA
Badania eksperymentalne estymatorów zostały przeprowadzone na stanowisku laboratoryjnym, w którym silnik indukcyjny zasilany z przemiennika częstotliwości mógł pracować zarówno w układzie otwartym, jak i zamkniętym. Zamkniętą strukturę regulacji prędkości silnika indukcyjnego z bezpośrednim sterowanie polowo-zorientowanym zrealizowano przy wykorzystaniu zmiennoprzecinkowego procesora
sygnałowego, który realizował również algorytmy odtwarzania prędkości za pomocą opisanych estymatorów neuronowych.
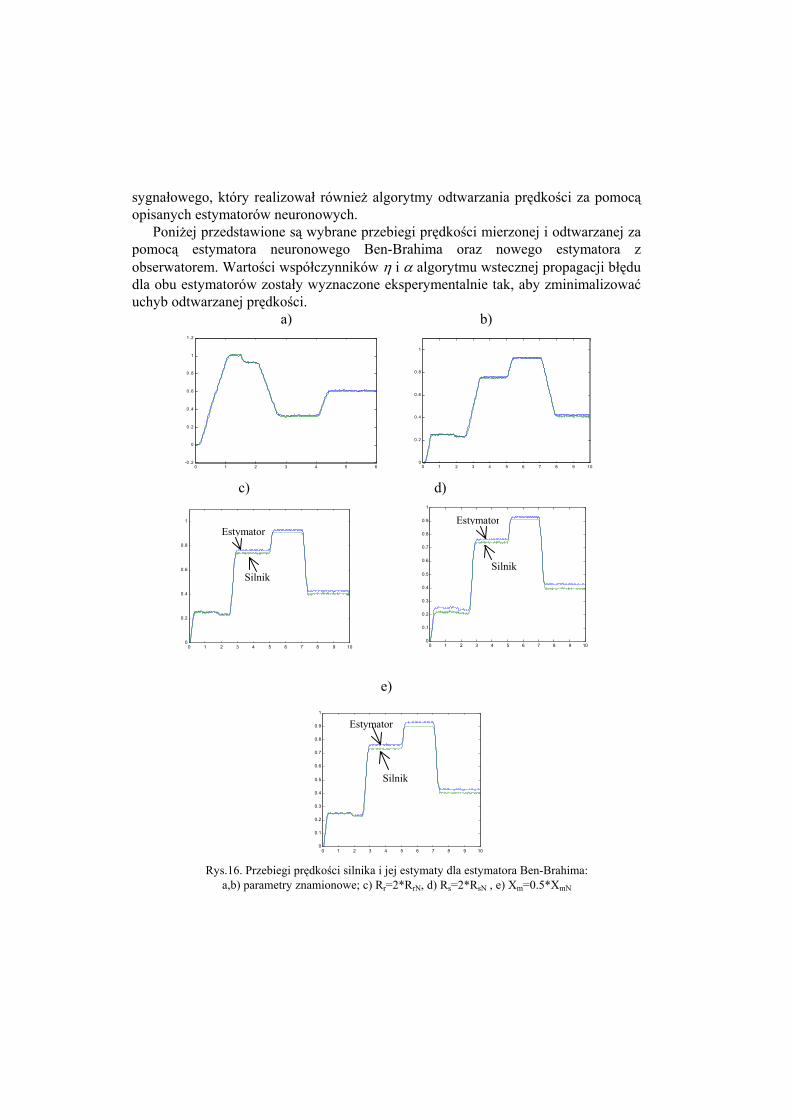
Poniżej przedstawione są wybrane przebiegi prędkości mierzonej i odtwarzanej za pomocą estymatora neuronowego Ben-Brahima oraz nowego estymatora z obserwatorem. Wartości współczynników η i α algorytmu wstecznej propagacji błędu dla obu estymatorów zostały wyznaczone eksperymentalnie tak, aby zminimalizować uchyb odtwarzanej prędkości.
a) b)
0 1 2 3 4 5 6-0 .2
0
0 .2
0 .4
0 .6
0 .8
1
1 .2
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
c) d)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
Silnik
e)
Rys.16. Przebiegi prędkości sil
0 1 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
a,b) parametry znamionowe
Silnik
Estymator
Estymator
nika i jej estym
3 4 5 6
; c) Rr=2*RrN,
9
1
Estymator
aty dla
7 8
d) Rs=2
Silnik
estymatora Ben-Brahima:
9 10
*RsN , e) Xm=0.5*XmN
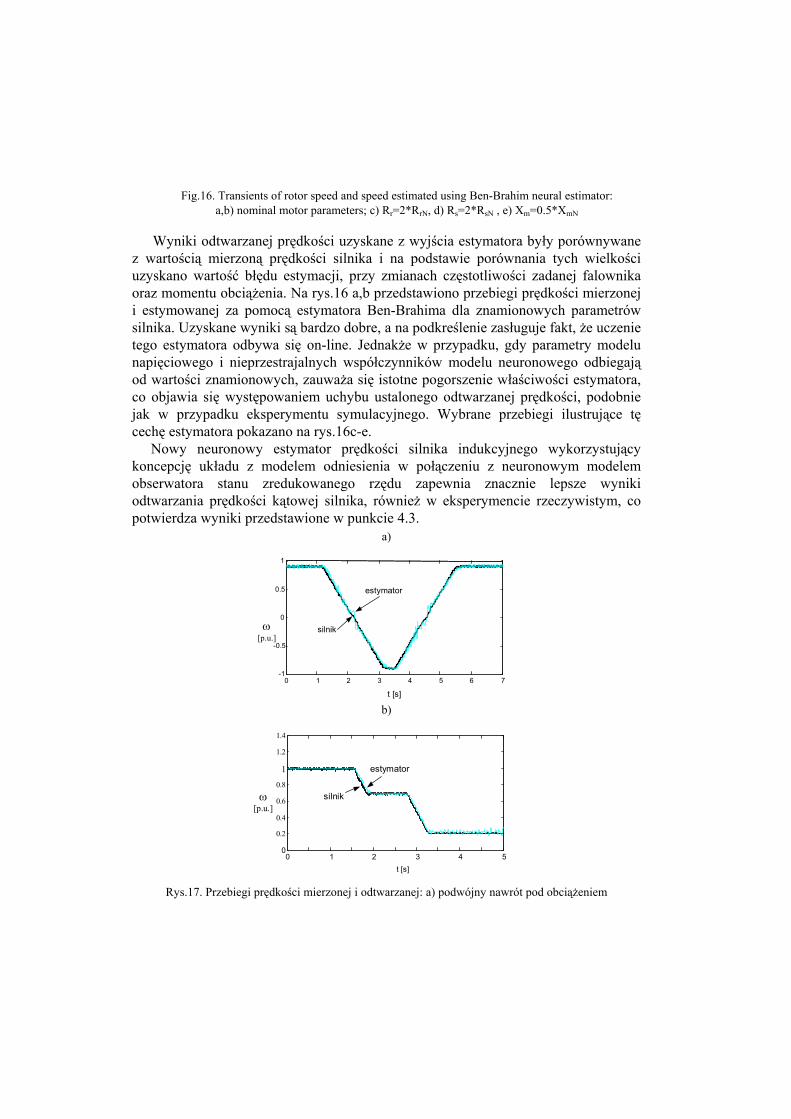
Fig.16. Transients of rotor speed and speed estimated using Ben-Brahim neural estimator: a,b) nominal motor parameters; c) Rr=2*RrN, d) Rs=2*RsN , e) Xm=0.5*XmN
Wyniki odtwarzanej prędkości uzyskane z wyjścia estymatora były porównywane
z wartością mierzoną prędkości silnika i na podstawie porównania tych wielkości uzyskano wartość błędu estymacji, przy zmianach częstotliwości zadanej falownika oraz momentu obciążenia. Na rys.16 a,b przedstawiono przebiegi prędkości mierzonej i estymowanej za pomocą estymatora Ben-Brahima dla znamionowych parametrów silnika. Uzyskane wyniki są bardzo dobre, a na podkreślenie zasługuje fakt, że uczenie tego estymatora odbywa się on-line. Jednakże w przypadku, gdy parametry modelu napięciowego i nieprzestrajalnych współczynników modelu neuronowego odbiegają od wartości znamionowych, zauważa się istotne pogorszenie właściwości estymatora, co objawia się występowaniem uchybu ustalonego odtwarzanej prędkości, podobnie jak w przypadku eksperymentu symulacyjnego. Wybrane przebiegi ilustrujące tę cechę estymatora pokazano na rys.16c-e.
Nowy neuronowy estymator prędkości silnika indukcyjnego wykorzystujący koncepcję układu z modelem odniesienia w połączeniu z neuronowym modelem obserwatora stanu zredukowanego rzędu zapewnia znacznie lepsze wyniki odtwarzania prędkości kątowej silnika, również w eksperymencie rzeczywistym, co potwierdza wyniki przedstawione w punkcie 4.3.
a) t [s]
0 1 2 3 4 5 6 7-1
-0.5
0
0.5
1
ω [p.u.] silnik
estymator
b)
0 1 2
3 4 50
0.2 0.4 0.6 0.8
1
1.2 1.4
ω [p.u.]
silnik
estymator
t [s]
Rys.17. Przebiegi prędkości mierzonej i odtwarzanej: a) podwójny nawrót pod obciążeniem
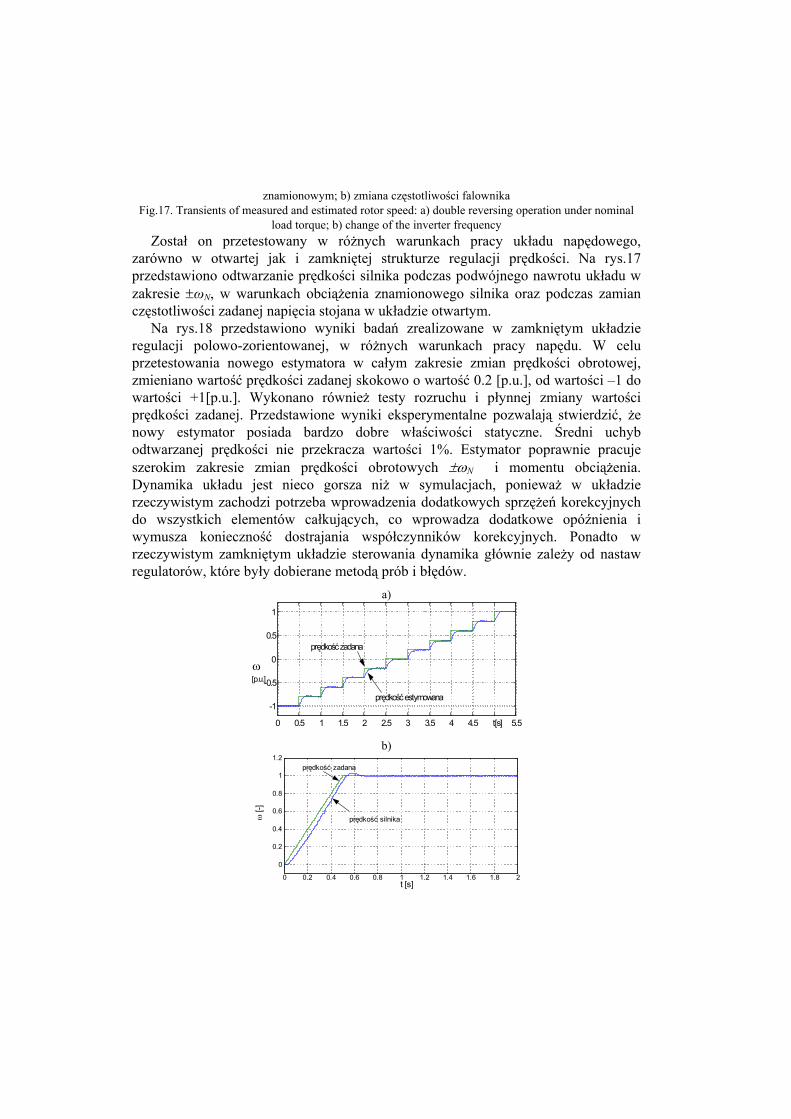
znamionowym; b) zmiana częstotliwości falownika Fig.17. Transients of measured and estimated rotor speed: a) double reversing operation under nominal
load torque; b) change of the inverter frequency Został on przetestowany w różnych warunkach pracy układu napędowego,
zarówno w otwartej jak i zamkniętej strukturze regulacji prędkości. Na rys.17 przedstawiono odtwarzanie prędkości silnika podczas podwójnego nawrotu układu w zakresie ±ωN, w warunkach obciążenia znamionowego silnika oraz podczas zamian częstotliwości zadanej napięcia stojana w układzie otwartym.
Na rys.18 przedstawiono wyniki badań zrealizowane w zamkniętym układzie regulacji polowo-zorientowanej, w różnych warunkach pracy napędu. W celu przetestowania nowego estymatora w całym zakresie zmian prędkości obrotowej, zmieniano wartość prędkości zadanej skokowo o wartość 0.2 [p.u.], od wartości –1 do wartości +1[p.u.]. Wykonano również testy rozruchu i płynnej zmiany wartości prędkości zadanej. Przedstawione wyniki eksperymentalne pozwalają stwierdzić, że nowy estymator posiada bardzo dobre właściwości statyczne. Średni uchyb odtwarzanej prędkości nie przekracza wartości 1%. Estymator poprawnie pracuje szerokim zakresie zmian prędkości obrotowych ±ωN i momentu obciążenia. Dynamika układu jest nieco gorsza niż w symulacjach, ponieważ w układzie rzeczywistym zachodzi potrzeba wprowadzenia dodatkowych sprzężeń korekcyjnych do wszystkich elementów całkujących, co wprowadza dodatkowe opóźnienia i wymusza konieczność dostrajania współczynników korekcyjnych. Ponadto w rzeczywistym zamkniętym układzie sterowania dynamika głównie zależy od nastaw regulatorów, które były dobierane metodą prób i błędów.
a)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 t[s] 5.5
-1
-0.5
0
0.5
1
ω [p.u.]
prędkość zadana
prędkość estymowana
b)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.2
0.4
0.6
0.8
1
1.2
t [s]
ω [-
]
prędkość silnika
prędkość zadana

Rys.18. Przebiegi prędkości zadanej i estymowanej w układzie zamkniętym: a) przy skokowej zmianie prędkości zadanej w trakcie nawrotu; b) przy płynnej zmianie prędkości zadanej
Fig.18. Transients of measured and estimated rotor speed in the closed-loop system: a) for step change of reference speed value during reversing operation; b) for smooth change of speed reference value

5. UWAGI KOŃCOWE I WNIOSKI
Na podstawie przeprowadzonych badań można sformułować następujące wnioski: 1. W przypadku badań symulacyjnych, sieć jednokierunkowa z jedną warstwą ukrytą
nie była w stanie odtwarzać prawidłowo prędkości SI przy rozszerzeniu zmian momentu obciążenia poza zakres treningowy, nawet przy zwiększaniu liczby neuronów w warstwie; można to było uzyskać dopiero przy zastosowaniu sieci kaskadowej lub ze sprzężeniem zwrotnym, które wykazały się też większą niewrażliwością na zmiany parametrów silnika.
2. Gdy sieci były trenowane na podstawie próbek eksperymentalnych, zarówno sieci jednokierunkowe jak i Elmana z jedną warstwą ukrytą były w stanie prawidłowo odtwarzać prędkość silnika. Można to wytłumaczyć większą informacją zawartą w zestawach treningowych otrzymanych na podstawie eksperymentów rzeczywistych. Nie występowały większe różnice w jakości odtwarzania pomiędzy sieciami jednokierunkowymi i rekurencyjnymi z jedną lub dwiema warstwami ukrytymi.
3. Dla zastosowań praktycznych lepsze są sieci jednokierunkowe, ze względu na prostotę ich budowy i szybszy proces treningowy, co ma istotne znaczenie przy realizacjach technicznych.
4. Uzyskano niewrażliwość na zmiany parametrów silnika i inne zakłócenia (np. pomiarowe) w przypadku zaproponowanych struktur sieci, w przeciwieństwie do innych rozwiązań, wykorzystujących metodę modelowania neuronowego [6]-[9].
5. W przypadku zasilania silnika napięciem o stałej częstotliwości, wszystkie proponowane struktury SN mogą odtwarzać prędkość i strumień wirnika na podstawie pomiaru tylko wartości chwilowych prądu stojana; przy czym niezbędne jest podawanie na wejście SN jego wartości opóźnionych (w kilku poprzednich chwilach czasowych) i amplitudy prądu. W związku z tym takie rozwiązania estymatorów neuronowych mogą być wykorzystywane do monitorowania silnika prędkości i strumienia pracującego przy stałej częstotliwości zasilania.
6. W przypadku częstotliwościowego sterowania prędkością silnika indukcyjnego, estymator neuronowy wymaga dodatkowego sygnału na wejściu sieci: może to być informacja o częstotliwości prądu stojana. Można ją uzyskać z realizowanego numerycznie przetwornika I/f lub podając na wejście sieci informację o amplitudzie napięcia stojana, która w układach regulacji częstotliwościowej jednoznacznie zależy od aktualnej wartości prędkości zadanej, a więc i częstotliwości stojana. Ponadto sygnał ten zawiera informację o aktualnym poślizgu silnika, gdyż amplituda napięcia jest zazwyczaj korygowana odpowiednio do zmian poślizgu w zamkniętych układach regulacji prędkości. W związku z tym, w przypadku układów
zamkniętych, wśród sygnałów podawanych na wejście estymatora neuronowego powinna występować informacja o amplitudzie napięcia stojana.
Przeprowadzone badania symulacyjne oraz na obiekcie rzeczywistym wykazały, że estymator prędkości według propozycji Ben-Brahima [1], [2], wykorzystujący model napięciowy strumienia wirnika i sieć neuronową z liniowymi funkcjami aktywacji odwzorowującą model prądowy tego strumienia, jest wrażliwy na zmiany wszystkich parametrów schematu zastępczego silnika indukcyjnego użytych w tych modelach.
Wyniki odtwarzania prędkości można istotnie poprawić przy zastosowaniu nieco innej koncepcji takiego estymatora, wykorzystującej obserwator stanu w roli neuronowego modelu przestrajalnego [19]. Uzyskane wyniki badań symulacyjnych i eksperymentalnych potwierdziły prawidłowość takiej koncepcji i dobrą jakość estymacji prędkości silnika indukcyjnego. Wadą neuronowych estymatorów przedstawionych w niniejszym artykule, jest konieczność dostrajania współczynników uczenia α i momentum η dla każdego silnika, co uniemożliwia wykorzystanie takich estymatorów jako uniwersalnych członów bezczujnikowego układu napędowego. Jednak dostrajanie takie można przeprowadzić w trakcie kilku próbnych uruchomień układu, ze względu na proces uczenia on-line takiego estymatora.
Można dyskutować, czy koncepcja estymatorów neuronowych opartych na idei modelowania neuronowego i układu typu MRAS stanowi rzeczywiście rozwiązanie z dziedziny sztucznych sieci neuronowych. Wydaje się jednak, że sieć zastosowaną w tym rozwiązaniu, z neuronami o liniowej funkcji aktywacji i współczynnikach wagowych dostrajanych metodą wstecznej propagacji błędu można uznać za przypadek szczególny sieci jednowarstwowej ze sprzężeniem zwrotnym, co klasyfikuje to rozwiązanie do grupy estymatorów neuronowych.
Jak wynika z analizy literatury, wszystkie działania związane z zastosowaniem sieci neuronowych w obszarze napędu elektrycznego mają charakter prac badawczych, ale pojawiają się już pierwsze realizacje praktyczne przy wykorzystaniu szybkich procesorów sygnałowych [2], [6], [15], [22]. Należy jednak oczekiwać, że wraz ze wzrostem zastosowań nastąpi rozwój specjalizowanych procesorów neuronowych, który doprowadzi do spadku ich cen i znacznie uprości realizacje praktyczne.
LITERATURA
[1] BEN-BRAHIM L., KUROSAWA R., Identification of induction motor speed using neural networks, Proceedings of the Power Conversion Conference, Yokohama, Japan, 1994, pp. 689-694
[2] BEN-BRAHIM L., TADAKUMA S. AND AKDAG A., Speed control of induction motor without rational transducers, IEEE Transactions on Industry Applications, vol.35, no.4, 1999, pp.844-850
[3] BOSE B.K., Expert system, fuzzy logic and neural network applications in power electronics and motion control, Proceedings of the IEEE, vol.82, no. 8, 1994, pp.1303-1323.
[4] GRZESIAK L., DĄBROWSKI P., KOCZARA W., Neural network system for a flux linkage estima-
tion of the induction machine, Proc. of PEMC’94 Confer., Warsaw, 1994, pp.706-711 [5] HOLTZ J., State of the art of controlled AC drives without speed sensor, Proc. of the Intern. Confer.
on Power Electronics and Drive Systems PEDS’95, Singapore, 1995, pp.1-6. [6] KAZMIERKOWSKI M.P., ORLOWSKA-KOWALSKA T., NN state estimation and control in
converter-fed induction motor drives, Chapter 2 in a book: “Soft Computing in Industrial Electronics”, Physica-Verlag, Springer, Heilderberg, Germany, 2002, pp.45-94
[7] LORENZ R.D., Sensorlees drive control methods for stable high performance zero speed operation, Proc. of 9th Confer.on Power Electronics and Motion Control PEMC’2000, Kosice, Slovak Republic, 2000, pp.1.1-1.11
[8] MIGAS P., Zastosowanei sieci neuronowych do odtwarzania zmiennych stanu silnika indukcyjnego, Rozprawa doktorska, Politechnika Wrocławska, 2002
[9] ORŁOWSKA-KOWALSKA T., Obserwatory zmiennych stanu i parametrów w układach sterowania silników indukcyjnych klatkowych, Prace Naukowe Instytutu Układów Elektromaszynowych P.WR., seria Monografie, 1990, nr 41/9, s.121
[10] ORLOWSKA-KOWALSKA T., KOWALSKI CZ.T., Neural network based flux observer for the induction motor drive, Proc. of PEMC’96, Budapest, 1996, pp. 187-191
[11] ORLOWSKA-KOWALSKA T., Artificial neural networks in the electrical drives control – a survey, Archives of Electrical Engineering, vol.47, no.2, 1998, pp.127-143
[12] ORLOWSKA-KOWALSKA T., PAWLAK M., Implementation of neural network speed estimator with help of TMS320C digital signal processor, Proc. of Intern. Confer. EPEA /EDPE’99, Stara Lesna, Slovakia, 1999, pp.292-298
[13] ORŁOWSKA-KOWALSKA T., Odtwarzanie sygnałów sprzężeń zwrotnych w napędach bezczujnikowych z silnikami indukcyjnymi, Przegląd Elektrotechniczny, No.10, 1998, s.258-263
[14] ORLOWSKA-KOWALSKA T., MIGAS P., Analysis of the Neural Network Structures for Induction Motor State Variables Estimation, Confer. Proceed. SPEEDAM’98, Sorrento, Italy, 1998, pp.P3.55-59
[15]ORŁOWSKA-KOWALSKA T., MIGAS P., Neural speed estimator for the induction motor drive, Confer. Proceed. PEMC’98, Prague, 1998,.vol.7, pp.8.89-8.94
[16] ORLOWSKA-KOWALSKA T. AND WOJSZNIS P., Comparative study of different flux estimators for sensorless induction motor drive, Archives of Electrical Engineering, vol. 49, no.1, 2000, pp.49-63.
[17] ORLOWSKA-KOWALSKA T., PAWLAK M., Induction motor speed estimation based on neural modeling method, Archives of Electrical Engineering, vol. 49, no.1 , 2000, pp.35-48
[18] ORLOWSKA-KOWALSKA T., MIGAS P., Analysis of the induction motor speed estimation quality using neural networks of different structure, Archives of Electrical Engineering, vol.50, No.4, 2001, pp.411-425
[19] ORLOWSKA-KOWALSKA T., PAWLAK M., Induction Motor Drive Monitoring using New Neural Speed Estimator, Proc. of the 2nd IEEE Inter. Symp. On Diagnostics for Electrical Machines, Power Electronics and Drives, IEEE-SDEMPED’2001, Grado-Gorizia, Italy, pp.453-458
[20] ORŁOWSKA-KOWALSKA T., Bezczujnikowe układy napędowe z silnikami indukcyjnymi, ser. wyd. PAN „Postępy Napędu Elektrycznego i Energoelektroniki”, vol.48, 2003, Oficyna Wydawnicza Politechniki Wrocławskiej (w druku)
[21] OSOWSKI S., Sieci neuronowe w ujęciu algorytmicznym, WNT, 1996 [22] SIMOES K., BOSE B.K., Neural network based estimation of feedback signals for a vector con-
trolled induction motor drive, IEEE Trans. on Ind.Appl., vol.31, No.3, 1995, p.620-639 [23] SOBCZUK D., Application of artificial neural networks for control of PWM inverter-fed induction
motor drives, Ph.D. Thesis, Warsaw University of Technology, 1999 [24] TAMAI S., SUGIMOTO H., YANO M., Speed sensorless vector control of induction motor with
model reference adaptive system, Proc. of IEEE Industry Applications Society, 1987, pp.189-195

[25] TSOI A.C., BACK A., Locally Recurrent Globally Feedforward Networks: A Critical Review of Architectures, IEEE on Neural Networks, vol.5, No.2, 1994, pp.229-239
[26] TOH A.K.P., NOWICKI E.P., A flux estimator for field oriented control of an induction motor using an artificial neural network, Proc. of IAS’94, pp.585-592
[27] VAS P., Artificial-Intelligence-Based Electrical Machines and Drives, Oxford University Press, New York, UK, 1999
NEURAL NETWORK – BASED SPEED ESTIMATORS FOR THE INDUCTION MOTOR
The paper deals with neural networks application for the induction motor speed estimation. The neu-ral identification method based on multilayer neural networks was shortly characterized and the other method, based on neural modelling in the MRAS scheme was described in details. The classical method, based on multi-layer neural networks with nonlinear activation functions, was compared with two meth-ods based on neural modelling approach: classical MRAS-based estimator and a new estimator equipped with a state observer. Simulation and experimental results of the speed estimation were presented for an open and closed-loop operation of the vector controlled drive system with induction motor. Experiments were performed in a laboratory set-up equipped with the floating-point digital signal processor TMS320C31 used for a realisation of the speed estimation method and converter-fed induction motor control system.