Embed Size (px)
DESCRIPTION
Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011Nghiên cứu khả năng ứng dụng FPGA trong việc điều khiển đồng bộ hệ động cơ một chiều trong dây chuyền bọc cáp viễn thông A study on practical application of FPGA technology in controlling synchronically a brushed DC motor of telecommunication cable plaiting/spinning lineTrương Đăng Khoa Học viện Kỹ thuật Quân sự e-Mail: [email protected]óm tắt Bài báo trình bày những khả năng thực tế ứng dụng công nghệ FPGA (Field Programmable Gate A
Citation preview

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
Nghiên cứu khả năng ứng dụng FPGA trong việc điều khiển đồng bộ hệ
động cơ một chiều trong dây chuyền bọc cáp viễn thông
A study on practical application of FPGA technology in controlling
synchronically a brushed DC motor of telecommunication cable
plaiting/spinning line
Trương Đăng Khoa
Học viện Kỹ thuật Quân sự
e-Mail: [email protected]
Tóm tắt
Bài báo trình bày những khả năng thực tế ứng
dụng công nghệ FPGA (Field Programmable Gate
Array) trong việc điều khiển và đồng bộ tốc độ cho
một dây chuyền bện cáp viễn thông, những ưu,
nhược điểm, các vấn đề kỹ thuật cần phải tập trung
giải quyết khi thực hiện thực tế.
Abstract:
The article shows pratical applications of
FPGAtechnology in controlling synchronically a
brushedDC motor of telecommunication cable
plaiting/spinning line; advantages, disadvantages
and technical problems to be handled in reality.
1. Các giải pháp kỹ thuật hiện nay trong
điều khiển và đồng bộ tốc độ hệ
nhiều động cơ một chiều Hệ thống điều khiển và đồng bộ tốc độ cho dây
chuyền nhiều động cơ một chiều sản xuất cáp viễn
thông hiện nay vẫn chủ yếu sử dụng theo nguyên
tắc thay đổi điện áp phần ứng, tạo tín hiệu xung
đồng bộ dạng răng cưa, so sánh với điện áp điều
khiển một chiều để xác định góc mở của thyristor
nhằm thay đổi điện áp một chiều đưa đến động cơ
[2]. Giải pháp phần cứng thực hiện nguyên tắc này
chủ yếu dựa trên các phần tử sau:
- Dùng các linh kiện rời rạc, như bán dẫn, tụ,
trở;
- Dùng các linh kiện tổ hợp logic (IC số);
- Dùng vi điều khiển với các phần mềm lập
trình thông dụng (C, C+);
- Dùng PLC (Programmable Logic Controller)
với các modun xử lý số mở rộng.
2. Những khả năng thực tế khi ứng dụng
FPGA trong điều khiển và đồng bộ tốc
độ Hiện nay, công nghệ FPGA (Field
Programmable Gate Array) đã phát rất mạnh và
đang được ứng dụng một cách rộng rãi trong nhiều
ngành kỹ thuật và công nghiệp. Việc ứng dụng các
board FPGA trong việc thiết kế hệ thống điều khiển
đồng bộ cho một dây chuyền bện cáp viễn thông có
các ưu điểm nổi bật: [2]
- Số cổng logic tổ hợp trong một board là rất lớn,
do đó có thể giải quyết được bài toán điều khiển với
các chương trình đồng bộ tốc độ khác nhau;
- Tốc độ xử lý rất cao, xử lý song song, đáp ứng
đươc yêu cầu thời gian thực với điều khiển hệ
thống nhiều động cơ một chiều;
- Trên các board FPGA đã tổ hợp sẵn các bộ biến
đổi A/D, D/A nên dễ dàng phối hợp với các tín hiệu
tương tự đầu vào, đầu ra (ví dụ, tín hiệu phản hồi
dòng điện);
- Số lượng đầu vào, đầu ra trên một board FPGA
rất lớn, được tùy ý quy định, do đó có thể đưa ra tín
hiệu điều khiển cho một số lượng lớn động cơ một
chiều;
- Chương trình phần mềm hướng đối tượng, được
tổ chức theo các quá trình (process), dễ viết cũng
như kiểm tra, sửa lỗi.
3. Xây dựng sơ đồ chức năng và chương
trình điều khiển và đồng bộ tốc độ
3.1.Sơ đồ chức năng của dây chuyền bện
cáp viễn thông (hình 1) [1]
Guång c¸p
Nhåi dÇu chèng Èm
QuÊn b¨ng mica
KÐo c¸p Thu c¸p
H 1. Sơ đồ chức năng thiết bị dây chuyền bện cáp viễn thông
106

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
Như vậy, trong dây chuyền bện cáp viễn thông
thường có 4 động cơ một chiều:
- Động cơ guồng cáp, trên đó bố trí các rulo đã có
các đôi dây xoắn nhóm;
- Động cơ bọc băng mica;
- Động cơ kéo dây;
- Động cơ thu dây vào bobin.
Trong 4 động cơ này, quan trọng nhất và có ảnh
hưởng quyết định đến chất lượng bện cáp là động
cơ guồng cáp, đây cũng là động cơ có công suất lớn
nhất. Trong quá trình đồng bộ tốc độ sẽ coi động cơ
này là động cơ chính (master), các động cơ còn lại
là động cơ phụ (slave). Các động cơ phụ ngoài việc
tự ổn định tốc độ theo các tín hiệu phản hồi cục bộ
(phản hồi dòng, áp) còn được đồng bộ tốc độ theo
tín hiệu phản hồi của động cơ chính. Thuật toán
điều khiển các động cơ ở đây là điều khiển theo
chương trình đối với dung lượng đôi cáp khác nhau,
việc ổn định tốc độ vẫn dùng thuật toán PID cổ
điển. Các thuật toán này được tổ chức trong chương
trình của FPGA. Đầu ra điều khiển của FPGA ở
đây là các xung điều khiển có độ vị trí và độ rộng
theo yêu cầu, nhưng biên độ thấp (thường là mức
3,3V). Xung điều khiển này được khuếch đại đệm
rồi qua biến áp xung đến cực điều khiển của
thyristor khuếch đại công suất (hình 2).
Tín hiệu đồng bộ
Tín hiệu ngắt sự cố
Khuyếch đại đệmKhuyếch công suất
Master
đại Động cơ Master
Đo tốc độ
~
Biến áp dòng
~
FPGA
Khuyếch công suất Slave (1,2,3)
đại
Đo tốc độ
Động cơSlave (1,2,3) Khuyếch đại đệm
H 2. Cấu trúc hệ thống điều khiển và đồng bộ tốc độ động cơ cho dây chuyền bện cáp
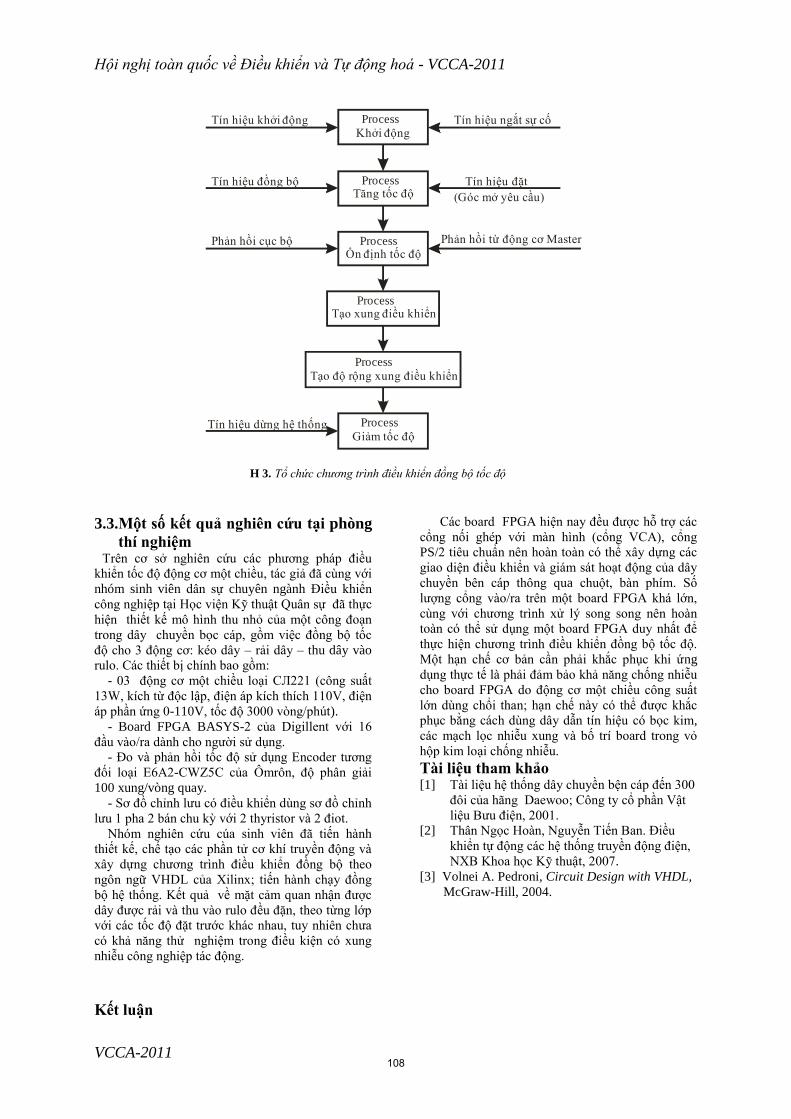
3.2. Tổ chức chương trình Việc tổ chức chương trình điều khiển đồng bộ
tốc độ cho dây chuyền bện cáp được viết trong một
Project hoàn chỉnh với các thủ tục như khai báo
cổng vào/ra, định nghĩa các hằng, biến, tín hiệu
v.v... được viết trên ngôn ngữ thông dụng VHDL
hoặc Verilog. Dưới đây sẽ xem xét các chương
trình (process) chính (hình 3).
Nhiệm vụ chính của các process như sau
- Process khởi động: Nhận tín hiệu khởi động hệ
thống hoặc tín hiệu dừng khẩn cấp khi có sự cố
trong quá trình hoạt động của dây chuyền.
- Process tăng tốc độ: Thực hiện việc thay đổi từ
từ vị trí của xung điều khiển với tốc độ phù hợp với
đặc tính cơ của từng động cơ có trong dây chuyền,
cũng như tỷ số tryền của các bộ giảm tốc, đảm bảo
trong giai đoạn này bước xoắn và độ căng của cáp
vẫn đạt yêu cầu.
- Process ổn định tốc độ: Đây là process thực hiện
thuật toán ổn định tốc độ cho tất cả các động cơ
trong dây chuyền. Thuật toán ổn định tốc độ sử
dụng PID, đặc biệt trong process này cần phải tạo
được độ dịch xung điều khiển theo vị trí góc mở
yêu cầu và dấu của sai lệch tốc độ theo quy luật
hàm cosin, do sự thay đổi điện áp một chiều đầu ra
tỷ lệ với cosin của góc mở thyristor.
- Process chọn xung điều khiển: Tạo ra các nhóm
xung điều khiển đưa đến từng động cơ.
- Process tạo độ rộng xung điều khiển: Tạo độ
rộng xung điều khiển theo yêu cầu, tùy thuộc vào
công suất của từng động cơ.
107
Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
Process
Khởi động
Process Tăng tốc độ
Process Ổn định tốc độ
Process Tạo xung điều khiển
Process
Tạo độ rộng xung điều khiển
Tín hiệu khởi động
Tín hiệu đồng bộ
Phản hồi cục bộ
Tín hiệu ngắt sự cố
Tín hiệu đặt
Phản hồi từ động cơ Master
(Góc mở yêu cầu)
Process
Giảm tốc độ Tín hiệu dừng hệ thống
H 3. Tổ chức chương trình điều khiển đồng bộ tốc độ
3.3.Một số kết quả nghiên cứu tại phòng
thí nghiệm Trên cơ sở nghiên cứu các phương pháp điều
khiển tốc độ động cơ một chiều, tác giả đã cùng với
nhóm sinh viên dân sự chuyên ngành Điều khiển
công nghiệp tại Học viện Kỹ thuật Quân sự đã thực
hiện thiết kế mô hình thu nhỏ của một công đoạn
trong dây chuyền bọc cáp, gồm việc đồng bộ tốc
độ cho 3 động cơ: kéo dây – rải dây – thu dây vào
rulo. Các thiết bị chính bao gồm:
- 03 động cơ một chiều loại СЛ221 (công suất
13W, kích từ độc lập, điện áp kích thích 110V, điện
áp phần ứng 0-110V, tốc độ 3000 vòng/phút).
- Board FPGA BASYS-2 của Digillent với 16
đầu vào/ra dành cho người sử dụng.
- Đo và phản hồi tốc độ sử dụng Encoder tương
đối loại E6A2-CWZ5C của Ômrôn, độ phân giải
100 xung/vòng quay.
- Sơ đồ chỉnh lưu có điều khiển dùng sơ đồ chỉnh
lưu 1 pha 2 bán chu kỳ với 2 thyristor và 2 điot.
Nhóm nghiên cứu cúa sinh viên đã tiến hành
thiết kế, chế tạo các phần tử cơ khí truyền động và
xây dựng chương trình điều khiển đồng bộ theo
ngôn ngữ VHDL của Xilinx; tiến hành chạy đồng
bộ hệ thống. Kết quả về mặt cảm quan nhận được
dây được rải và thu vào rulo đều đặn, theo từng lớp
với các tốc độ đặt trước khác nhau, tuy nhiên chưa
có khả năng thử nghiệm trong điều kiện có xung
nhiễu công nghiệp tác động.
Kết luận
Các board FPGA hiện nay đều được hỗ trợ các
cổng nối ghép với màn hình (cổng VCA), cổng
PS/2 tiêu chuẩn nên hoàn toàn có thể xây dựng các
giao diện điều khiển và giám sát hoạt động của dây
chuyền bên cáp thông qua chuột, bàn phím. Số
lượng cổng vào/ra trên một board FPGA khá lớn,
cùng với chương trình xử lý song song nên hoàn
toàn có thể sử dụng một board FPGA duy nhất để
thực hiện chương trình điều khiển đồng bộ tốc độ.
Một hạn chế cơ bản cần phải khắc phục khi ứng
dụng thực tế là phải đảm bảo khả năng chống nhiễu
cho board FPGA do động cơ một chiều công suất
lớn dùng chổi than; hạn chế này có thể được khắc
phục bằng cách dùng dây dẫn tín hiệu có bọc kim,
các mạch lọc nhiễu xung và bố trí board trong vỏ
hộp kim loại chống nhiễu.
Tài liệu tham khảo [1] Tài liệu hệ thống dây chuyền bện cáp đến 300
đôi của hãng Daewoo; Công ty cổ phần Vật
liệu Bưu điện, 2001.
[2] Thân Ngọc Hoàn, Nguyễn Tiến Ban. Điều
khiển tự động các hệ thống truyền động điện,
NXB Khoa học Kỹ thuật, 2007.
[3] Volnei A. Pedroni, Circuit Design with VHDL,
McGraw-Hill, 2004.
108

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
Trương Đăng Khoa sinh năm 1967, nhận bàng Kỹ sư chuyên ngành Tên lửa năm 1989 và bằng Thạc sỹ ngành Tự động hóa năm 1999 tại Học viện Kỹ thuật Quân sự. Từ năm 2000 đến năm 2004 là ngiên cứu sinh và nhận bằng Tiến sỹ ngành điều khiển tại trường Đại học kỹ thuật tổng hợp mang tên N.E. Bauman - Cộng hòa Liên bang Nga. Đã tham gia giảng dạy tại Học viện Kỹ thuật Quân sự từ năm 1990. Hiện nay là Giảng viên chính, Chủ nhiệm Bộ môn Tự động và Kỹ thuật tính, Khoa Kỹ thuật Điều khiển, Học viện Kỹ thuật Quân sự. Hướng nghiên cứu chính là các hệ thống điều khiển thiết bị bay.
109


![NGHIÊN CỨU GIẢI PHÁP KỸ THUẬT CHUYỀN ĐỘ CAO XUỐNG …ibst.vn/upload/documents/file_upload/1525681200Diem-Cong-Huy-1-.pdf · Trong bài báo [3] tác giả đã trình](https://img.pdfslide.tips/doc/110x75/5e21cc46fd527459d232f00b/nghin-cu-gii-php-k-thut-chuyn-cao-xung-ibstvnuploaddocumentsfileupload1525681200diem-cong-huy-1-pdf.jpg)


























