-
Министерство образования и науки Российской Федерации ФГБОУ ВПО
Ульяновский государственный технический университет
ОАО «Ульяновский механический завод»
СОВРЕМЕННЫЕ ПРОБЛЕМЫ
ПРОЕКТИРОВАНИЯ, ПРОИЗВОДСТВА
И ЭКСПЛУАТАЦИИ
РАДИОТЕХНИЧЕСКИХ СИСТЕМ
Сборник научных трудов
Ульяновск УлГТУ
2014
-
УДК 621.391 ББК 32.84 С56 УДК 621.391
Современные проблемы проектирования, производства и
эксплуа-тации радиотехнических систем : сборник научных трудов. –
Ульяновск : УлГТУ, 2014. – 191 с.
Основное внимание представленных в сборнике материалов (выпуск
9) уделено вопросам научных исследований и проектно-конструкторских
разработок предприятий и вузов по созданию и эксплуатации
радиотехнических комплексов гражданского и специального
назначения.
Представлены материалы, посвященные разработкам математических
моделей радиотехнических систем, новых подходов к их проектированию
и технологии изготовления. Редакционная коллегия: д-р техн. наук,
профессор Васильев К. К. (отв. редактор), канд. техн. наук, доцент
Гульшин В. А. (отв. секретарь), д-р техн. наук, профессор
Крашенинников В. Р., д-р техн. наук, профессор Ташлинский А. Г.,
аспирант Андриянов Н. А. ФГБОУ ВПО Ульяновский государственный
технический университет ОАО «Ульяновский механический завод»
Коллектив авторов, 2014
ОАО «УМЗ», 2014 ISBN 978-5-9795-1299-0 Оформление. УлГТУ,
2014
-
3
СОДЕРЖАНИЕ
1. РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ И КОМПЛЕКСЫ
Задачи военно-промышленного комплекса при построении системы
воздушно-космической обороны В. В. Лапин
............................................................................................................
8 Обнаружение сигналов при когерентной обработке В. А. Гульшин
......................................................................................................
10 Классификация терминологических групп в лексике системы
противовоздушной обороны среднего радиуса действия М. В. Ртищев, В.
И. Филимонов
........................................................................
17 Проблемы разработки современной авиационной бортовой аппарату-ры
вторичной радиолокации для управления воздушным движением Р. В.
Поликашкин, К. В. Филиппов, В. Г. Соколов, С. Б. Вахрушев, Н. В.
Веселкова
....................................................................................................
19 Выбор рациональной структуры приводов наведения
опорно-поворотных устройств бортовых антенн радиосвязи В. Г. Баунин
..........................................................................................................
23 Разработка способа подавления каналов угловой автоматики головки
самонаведения противорадиолокационной ракеты в интересах защиты
радиолокационных станций С. А. Успенский, Ю. В. Савутов, А. А.
Черемшанцев .................................... 27 Модель
радиолокатора с пассивной защитой от самонаводящихся на излучение
ракет Ю. Ю. Крисенко, С. А. Успенский, В. М. Мамыкин
....................................... 31 Способ защиты РЛС ЗРС и
ЗРК СД от ПРР путем применения дополнительных источников излучения
подъемного типа С. А. Успенский, И. А. Липатников, В. А.
Макаров........................................ 37 Проблемы
выделения движущихся объектов в многопозиционных системах РЛС А. С.
Гуторов
.......................................................................................................
44
-
4
Алгоритмы траекторной обработки по наблюдениям нескольких РЛС К.
К.Васильев, А. С. Гуторов, С. М. Наместников
................................ 47 Реализация алгоритма построения
траекторий маршрутов целей по многопозиционным наблюдениям А. С.
Гуторов, С. М. Наместников, Д. С. Кондратьев
.................................... 50 Морские системы
светосигнальной связи С. С. Гаврилов, С. В. Елягин
.............................................................................
55 Улучшенный алгоритм обнаружения сигналов с постоянным уровнем
ложных тревог И. Ф. Лозовский
..................................................................................................
57 Применение непараметрического анализатора помеховой обстановки
для повышения эффективности разнесенного приема сигналов Ю. Д.
Украинцев, А. А. Юрданова
....................................................................
60 Восстановление сигнала с использованием смешанной АР-модели Н.
А. Андриянов, В. Е. Дементьев
.....................................................................
64 Имитационное моделирование устройств обработки сигналов
пер-спективных систем связи в среде MATLAB Д. Р. Зарипова
......................................................................................................
67 Дискретные дважды стохастические авторегрессионные модели
случайных полей Н. А. Андриянов
..................................................................................................
69 Оценка аппаратурных затрат в процедуре мягкого декодирования
кодов Рида-Соломона А. А. Гладких
.......................................................................................................
73 Эффективное декодирование кодов Рида-Маллера и полярных кодов на
основе кластерного подхода Н. Ю. Чилихин
.....................................................................................................
79 Совместное применение сетевого и помехоустойчивого кодирования в
системах распределенного хранения данных Р. В. Климов
.........................................................................................................
82
-
5
Эффективное декодирование недвоичных кодов с провокацией
стертого элемента Дамдам Мохаммед Абдулла Яхья
.....................................................................
86 Мажоритарное декодирование кодов Рида-Маллера Аль-Месри Али Саид
Ахмед
..............................................................................
89 Декодирование с провокацией стертого элемента Саид Басем
Абдулсалам Салах
..........................................................................
92 Анализ эффективности фильтра Калмана при навигации автономных
необитаемых подводных аппаратов К. К. Васильев, И. М. Цветов
.............................................................................
95 Алгоритмы навигации с применением обработки изображений
подстилающей поверхности Хуссейн Абдуламир
Абдулкадим......................................................................
98 Архитектура автономного летательного аппарата С. С. Логинов, А.
Г. Френкель, В. Е. Дементьев
............................................. 102 Алгоритмы
автоматического управления АЛА С. С. Логинов, В. Е. Дементьев
.........................................................................
104 Методы обнаружения движущихся объектов на видеоизображениях,
получаемых с видеокамер ограниченной подвижности Л. Н. Гулящева
....................................................................................................
107 Протоколы шифрования в беспроводных сетях передачи данных И. В.
Карпов
........................................................................................................
111 Алгоритмы маршрутизации в беспроводных сетях Д. А. Иргизов
......................................................................................................
115
-
6
2. ПРОЕКТИРОВАНИЕ, ТЕХНОЛОГИЯ, ПРОИЗВОДСТВО И ЭКСПЛУАТАЦИЯ
РАДИОТЕХНИЧЕСКИХ СИСТЕМ
И УСТРОЙСТВ Напряженное состояние зоны изгиба и технологические
параметры процесса формовки гнутого профиля в роликах В. В. Лапин
..........................................................................................................
120 Вариант проверки и корректировки приёмного тракта
моноимпульс-ного амплитудного пеленгатора контрольным шумовым
сигналом А. Г. Шаповал, И. Ф. Полюхин
.........................................................................
125 Формирование требований к системе отображения данных мобильного
комплекса ПВО на ЖКИ панелях О. С. Яровиков, Д. Б. Весновский, А.
М. Мазо, Р. Р. Лаптева ....................... 130 Индикаторы
станции сопровождения целей комплекса ПВО малой дальности на ЖКИ
панелях Е. И. Маркова, П. С. Матюшин, Н. В. Немова
................................................ 134
Экспериментальное исследование схемы генератора СВЧ импульсов
наносекундной длительности В. Н. Буров, Ю. П. Лавренова
...........................................................................
137 Фазированная антенная решетка запросного канала D-диапазона Д.
В. Рябов, М. А. Терентьев, Н. Г. Сучков
..................................................... 140 Активные
антенные решетки – адаптивные варианты обзора пространства В. И.
Василенко
..................................................................................................
143 Применение математической модели параметров
электрорадиоэле-ментов при проектировании РЭС А. М. Покровский
...............................................................................................
147 Ракеты-мишени для имитации аэродинамических целей,
баллистических целей и противорадиолокационных ракет В. Н. Акимов,
В. П. Уласевич, А. А. Костюков
.............................................. 152 Использование
технологии NVIDIA CUDA для реализации алгоритмов дискретного
преобразования Фурье М. А. Терентьев
..................................................................................................
154
-
7
Определение теплового сопротивления КМОП цифровых интегральных
микросхем В. В. Юдин, В. А. Сергеев
.................................................................................
159 Решение задачи оптимизации конструкции тонкопленочных
электролюминесцентных индикаторов Д. А. Евсевичев, О. В. Максимова,
С. М. Максимов ...................................... 163
Устройства, инструмент и режимы поперечной резки при непрерывном
профилировании А. Н. Земскова, В. И. Филимонов
.....................................................................
166 Влияние обжима на качество покрытий при профилировании М. В.
Илюшкин, В. В. Марковцева, В. И Филимонов
.................................... 170 О некоторых вопросах
выбора способа изготовления замкнутых металлических профилей И. О.
Лисин, В. И. Филимонов, В. А. Щепочкин, А. А. Лисина
................... 173 О проблемах изготовления закрытых профилей
с перфорацией И. О. Лисин, В. И. Филимонов, К. С. Дементьев, А. А.
Лисина ................... 178 Синонимия и особенности перевода
общепринятых и локальных аббревиатур в журнальных статьях военной
проблематики М. В. Ртищев, Д. М. Шишкова
..........................................................................
181 К вопросу об адекватности математических моделей движения
морских подвижных объектов В. В. Рафальский
................................................................................................
186
-
8
1. РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ И КОМПЛЕКСЫ
УДК 621.391
ЗАДАЧИ ВОЕННО-ПРОМЫШЛЕННОГО КОМПЛЕКСА ПРИ ПОСТРОЕНИИ СИСТЕМЫ
ВОЗДУШНО-КОСМИЧЕСКОЙ ОБОРОНЫ
В. В. Лапин
Опыт локальных военных конфликтов последних десятилетий показал
огромный прогресс средств воздушного нападения, которые в
значитель-ной мере превосходят технологический уровень систем
информационного обеспечения и управления средствами ПВО разработки
70–80-х годов. Анализ тенденций развития средств воздушного
нападения (СВН) запад-ных стран позволяет сделать вывод о том, что
перспективные СВН будут оперировать в воздушно-космическом
пространстве на гиперзвуковых скоростях. Разрабатываются новые и
модернизируются имеющиеся сред-ства, действующие как в воздушном
пространстве, так и космосе. Воздуш-но-космические самолеты,
гиперзвуковые летательные аппараты, способ-ные действовать на
скоростях М – 5–25 и в диапазоне высот 40–120 км в ближайшем
будущем будут приняты на вооружение.
Продолжаются работы по снижению заметности средствами
обнару-жения в радиолокационном и инфракрасном диапазонах,
создаваемых аэ-родинамических летательных аппаратов. Тактика
применения средств воз-душного нападения предусматривает действие
как на предельно малых высотах, так и в стратосфере, что также
призвано затруднить или сделать невозможным своевременное
обнаружение и идентификацию ударных средств. Совершенствуются
беспилотные летательные аппараты, пере-сматривается их назначение и
способы применения, а также боевая нагруз-ка, что значительно
затрудняет борьбу с ними.
С повышением возможностей средств воздушно-космического
напа-дения результаты вооруженного противоборства сторон в этой
сфере будут иметь решающее значение на исход военных действий.
В условиях значительного снижения возможностей по созданию
сплошного радиолокационного поля (вследствие сокращения боевого
со-става радиотехнических войск), позволяющего своевременно
обнаружи-
-
9
вать воздушные объекты и обеспечивать выполнение возложенных на
авиацию, ПВО страны и войсковую ПВО задач, возможность
противодей-ствия высокотехнологичным средствам противника только
усложняется.
В этих условиях на разработчиков и производителей
радиолокаци-онных средств обнаружения и идентификации, средств
управления и свя-зи, зенитного ракетного вооружения возлагается
очень ответственная и технически сложная задача – обеспечить
вооруженные силы современны-ми средствами, способными бороться как
с имеющимися, так и с перспек-тивными СВН.
Построение современных систем обнаружения и идентификации,
предназначенных для управления зенитным ракетным вооружением,
осно-вывается на реализации многоспектрального способа обнаружения,
сопро-вождения и управления вооружением на основе комплексирования
радио-локационных систем с датчиками миллиметровых волн, лазерного,
оптиче-ского, инфракрасного и ультрафиолетового диапазонов.
Современные тен-денции построения средств обнаружения
предусматривают применение тепло- и телевизионных систем на основе
оптикоэлектронных матриц. Это позволяет проводить боевую работу в
условиях воздействия интенсивных активных и пассивных помех в
различное время суток при любых погод-ных условиях и одновременно
обеспечит скрытность самого факта функ-ционирования изделий.
При этом радиолокационные средства также должны
совершенство-ваться в части применения широкополосных сигналов,
быстрой пере-стройки несущей частоты, внедрения микропроцессорной
техники и «про-движение» обработки в цифре вплоть до антенн.
Цифровые приемники, начинающие обработку сигнала с промежуточной
частоты, одна из харак-терных черт современной радиолокации.
Перспективные системы обнаружения и сопровождения различного
назначения должны комплексироваться с современными российскими
средствами навигации, в частности глобальной навигационной
спутнико-вой системой ГЛОНАСС, средствами связи и информационного
обеспече-ния. Это позволит интегрировать изделия в единую
информационную сис-тему ПВО, что значительно повысит эффективность
их применения. По-добные комплексы должны характеризоваться высокой
помехоустойчиво-стью, всепогодностью, точностью и гибкостью
применения.
Для обеспечения возможности отражения массированных ударов
средств воздушного нападения требуется дальнейшее увеличение
количе-ства одновременного обстреливаемых целей, т. е. увеличение
многока-нальности зенитных ракетных комплексов.
Сегодняшние достижения науки и техники позволяют прогнозировать
именно такой облик РЛС ближайшего будущего. Акцент делается на
ком-плексирование РЛС различного типа, объединенных в единую
систему об-
-
10
наружения. При этом получит развитие нетрадиционное построение
сис-тем - многопозиционные радиолокационные комплексы, в том числе
пас-сивные, скрытые от радиотехнической разведки.
Применение перспективных разработок в области систем
информа-ционного обеспечения и управления при проектировании новых
и модер-низации существующих средств ПВО позволит обеспечить их
надежную и эффективную работу в течение первой половины XXI
века.
Лапин Вячеслав Викторович, Генеральный директор ОАО
«Ульяновский
механический завод», 432008, г. Ульяновск, Московское шоссе, 94.
УДК 621.396.96
ОБНАРУЖЕНИЕ СИГНАЛОВ ПРИ КОГЕРЕНТНОЙ ОБРАБОТКЕ
В. А. Гульшин В простейших амплитудных радиолокационных системах
обнаруже-
ние полезного сигнала производится методом некогерентного
накопления, когда обработке подвергается только огибающая
отраженного от радиоло-кационной цели эхо-сигнала. Безусловным
достоинством некогерентной обработки является простота ее
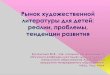
технической реализации. Пачка эхо–сигналов с выхода амплитудного
детектора, выделяющего огибающую, поступает на рециркулятор (рис.
1), либо на индикатор с яркостной отмет-кой, где происходит
некогерентное накопление. Сравнение амплитуды на-копленного сигнала
с пороговым уровнем дает информацию о наличии или отсутствии
сигнала. В случае обнаружения на индикаторе с яркостной от-меткой
оператор принимает решение о наличии сигнала на фоне помех и шумов,
исходя из собственного опыта и подготовленности.
Рис. 1 – Функциональная схема рециркулятора
Недостаток подобной обработки – низкая эффективность накопления
при малых отношениях сигнал/шум. Поэтому в современных
радиолока-ционных системах используются когерентные или
квазикогерентные мето-ды накопления с последовательными решающими
правилами.
ЛЗ m
∑ x'(t)
K
-
11
При обнаружении сигнала с полностью известными параметрами (с
точностью до фазы несущей), реализация процедуры не представляет
ка-ких-либо трудностей и реализовывается на основе корреляционного
при-емника. Однако этот случай представляет исключительно
теоретический интерес.
Рис. 2 – Функциональная схема корреляционного приемника
В случае обнаружения сигнала с неизвестной фазой при
известной
его частоте, что в радиолокации соответствует приему сигналов,
отражен-ных от неподвижных целей, также сравнительно просто
разрешается с по-мощью квадратурной обработки (рис. 3).
Рис. 3 – Функциональная схема квадратурного приемника
Однако наибольший интерес для радиолокации, вызывает случай,
когда цель является подвижной.
Несущая частота , при отражении от подвижных целей, вследствие
эффекта Доплера имеет смещение на величину
,
Х
ГОС УС
∫ ⋅T
dttstx0
)()(
ПУ x(t) z(T)>zn z(t) z(T)
-
12
где - частота Доплера; - радиальная скорость цели;
- длина волны РЛС. Если бы радиальная скорость была заранее
известна, то для коге-
рентного накопления сигналов, отраженных от движущейся цели,
доста-точно было бы сдвинуть частоту опорных колебаний в приемнике
на час-тоту Доплера. Однако, как правило, скорость объекта
неизвестна.
Рис. 4 - Многоканальный фильтро-корреляционный обнаружитель
fдоп min fдоп mах
Опорный сигнал из передающей системы
f0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
Смесь сигнал+помеха из приемной системы
Генератор доплеровских частот
х
х
Решение о нали-чии сигнала при
fдоп =0
∫
∫
пу
пу
лз
f0-fдоп mах
f0+fдоп mах
fдоп m
х
х
Решение о нали-чии сигнала при
+fдоп max
∫
∫
пу
пу
лз
пф
х
х
Решение о нали-чии сигнала при
-fдоп max
∫
∫
пу
пу
лз
пф
f0-fдоп min
f0+fдоп min
fдоп min
х
х
Решение о нали-чии сигнала при
+fдоп min
∫
∫
пу
пу
лз
пф
х
х
Решение о нали-чии сигнала при
-fдоп min
∫
∫
пу
пу
лз
пф
-
13
Априорная неопределенность доплеровского сдвига частоты сигнала,
вызванного движением цели, может быть преодолена за счет
использова-ния двух типов приемника – многоканального по частоте и
одноканально-го (адаптивного), подстраивающегося под оценку текущей
частоты сигна-ла. Рассмотрим особенности построения таких
приемников при использо-вании последовательных решающих правил.
Фильтро-корреляционный приемник представляет собой приемное
устройство, некоторое требуемое количество скоростных каналов (рис.
4).
Опорный сигнал из передающей системы поступает на смеситель, на
второй вход которого поступает сигнал, формируемый генератором
допле-ровских частот fдоп i. На выходе смесителя формируются две
гармоники - f0+fдоп i и f0-fдоп i, которые выделяются
соответствующими полосовыми фильтрами и играют роль опорных
сигналов для канала приближающейся цели (+fдоп i) и канала
удаляющейся цели (-fдоп i). Количество смесителей и,
соответственно, количество скоростных каналов определяется
максималь-ной радиальной скоростью цели и точностью ее
измерения.
При этом в каждом скоростном канале также обеспечивается
много-канальность устройства по дальности с помощью многоотводной
линии задержки, разбивающей рабочую дистанцию на участки.
Протяженность данных участков определяется разрешающей способностью
РЛС по даль-ности. В каждом из них производится операция умножения
опорного сиг-нала и принятой помехи или смеси помеха + сигнал.
Результаты умноже-ния накапливается в соответствующих интеграторах
и сравниваются с по-роговым уровнем в пороговых устройствах каждого
дальностного канала.
Обнаружитель включает в себя набор частотных каналов, каждый из
которых реализует корреляционную обработку для некоторой
фиксиро-ванной частоты Доплера
,
где - ширина полосы пропускания каждого канала; и -
соответственно максимальные и минимальные частоты Доп-
лера; m - число каналов.
При точном совпадении частоты Доплера с частотой генератора
доп-леровских частот одного из каналов данная схема обеспечивает
опти-мальную обработку. Если же частоты и различаются, то амплитуда
импульсов на выходе корреляционного приемника будет изменяться в
процессе накопления по синусоидальному закону, что приводит к
потерям накопленного отношения сигнал/шум. Оценим число каналов,
необходи-мое для того, чтобы эти потери не превышали заданной
величины.
Пусть в начале накопления разность сигнала и опорного генератора
равно нулю, а амплитуда импульса на выходе когерентного детектора
.
-
14
В конце накопления сигнал на выходе когерентного детектора будет
иметь уже амплитуду
, где - время накопления; .
Если считать допустимым уменьшение амплитуды в конце накопле-ния
в раз, то из условия , следует: , или
. Максимальная абсолютная величина расстройки равна половине
ши-
рины полосы пропускания канала , откуда или . При приеме
последовательности n импульсов время наблюде-
ния . Так как радиолокационные цели могут как удаляться, так и
прибли-
жаться, то количество каналов в таком приемнике увеличивается в
два раза, соответственно.
Если превосходит максимальный диапазон однозначного измерения
доплеровских частот, равный величине 1/Т, то диапазон частот
перекры-ваемых набором фильтров составляет 2/Т, тогда .
Таким образом, число частотных каналов, необходимых для
обеспе-чения допустимых потерь накопления, прямо пропорционально
времени наблюдения T.
Реализация такого многоканального по частоте устройства (если
учесть еще и многоканальность по дальности) оказывается весьма
сложной как в схемотехническом, так и в конструкторском плане.
Построение одноканального (адаптивного), подстраивающегося под
оценку текущей частоты сигнала базируется на следующих
принципах.
Как правило, на некотором временном интервале наблюдения или
длительности пачки эхо-сигналов можно допустить, что цель движется
с постоянной радиальной скоростью. В этом случае можно считать, что
за-кон изменения фазы между принимаемыми импульсами определяется
ли-нейной зависимостью:
,
где - фаза 1-го импульса; Т – период повторения зондирующих
импульсов;
- набег фазы за период повторения зондирующих импульсов; .
-
15
Экстраполяционно-фазовый обнаружитель (ЭФО) представляет
од-ноканальную схему обнаружения – оценивания, т.е. реализует
второй воз-можный подход к проблеме устранения априорной
неопределенности.
Суть метода ЭФО заключается в рекурсивном сглаживании фазовых
отсчетов и экстраполяции сглаженной фазовой траектории на следующий
период повторения.
При этом на каждом 1-м периоде повторения с учетом разности
текущего отсчета фазы и ее экстраполированного значения,
вычисленного на предыдущем шаге, рассчитывается решающая
статистика и экстраполированное (ожидаемое) на -й период повторения
зна-
чение фазы . Очевидно, что такой рекуррентный алгоритм расчета
ре-шающей статистики органично сочетается с последовательной
процедурой принятия решения.
Метод ЭФО позволяет настраиваться в ходе наблюдения на фазовую
траекторию, соответствующую истинному значению доплеровской
часто-ты, и, постепенно повышая точность ее измерения, приближать
процесс накопления к когерентному.
Алгоритм ЭФО достаточно просто реализуется при допущении о
ли-нейном изменении фазы сигнала во времени. При этом для
сглаживания фазы может использовать рекурсивный алгоритм,
аналогичный применяе-мому в системах вторичной обработки информации
для сглаживания тра-екторий целей:
, , ,
экстраполированное значение фазы
где - сглаженное значение фазы
Основное ограничение, присущее рассмотренному алгоритму,
связа-
но с тем, что использованное в нем предположение о линейном
характере фазовой траектории при импульсной радиолокации не
выполняется: из-за стробоскопического эффекта интервал однозначного
измерения фазы со-ставляет 0…2π, т.е. реальная фазовая траектория
имеет циклический (пи-лообразный характер), скачки фазы при
переходе через точку могут при-водить к ошибкам сглаживания
траектории и, как следствие, к уменьше-нию эффективности накопления
(рис. 5).
Оптимальные алгоритмы сглаживания циклических траекторий,
имеющих два неизвестных параметра: начальную фазу и угол наклона
(до-плеровский сдвиг), практически нереализуемы из-за своей
сложности. Рас-смотренный алгоритм, базирующийся на линейной
аппроксимации фазо-вой траектории, удовлетворительно сглаживает
циклические траектории, когда дисперсия фазовой траектории невелика
по сравнению с интервалом
-
16
однозначного измерения фазы. Указанное условие выполняется в
системах с высокой частотой повторения (квазинепрерывный сигнал),
где число от-счетов, приходящееся на интервал однозначного
измерения достаточно ве-лико, либо при достаточно больших
отношениях сигнал/помеха, когда дисперсия каждого отсчета фазы
существенно меньше.
Рис. 5 – Варианты сглаживания траектории изменения фазы
Очевидно, для эффективного использования информации о фазе
сиг-
нала подобный анализ возможен лишь в истинно-когерентный
радиолока-ционных системах с высокой скважностью зондирующих
импульсов.
Критерий выбора частоты повторения зондирующих импульсов из
условия однозначного измерения скорости , однако на прак-тике это
означает, что на один период частоты Доплера будет всего два
от-счета измерения фазы. Следовательно, частота повторения
зондирующих импульсов должна превышать расчетную в 3–5 раз, для
того, чтобы отсче-тов значения фазы за период частоты Доплера было
6–10. Это позволит более точно выявить зависимость изменения фазы
во времени.
Если ни одно из вышеуказанных условий не выполняется, то
проис-ходят сбои сопровождения (сглаживания), в результате решающая
стати-стика вычисляется с ошибками и увеличивается вероятность
пропуска сигнала.
В заключении отметим, что алгоритм ЭФО принципиально не
обес-печивает разрешения по доплеровской частоте объектов,
пространствен-ные координаты которых совпадают (например – цели в
облаке пассивных помех). Многоканальные схемы свободны от указанных
недостатков.
Гульшин Владимир Александрович, к.т.н., доцент, начальник Центра
подготовки и переподготовки специалистов инозаказчика ОАО
«Ульяновский механический за-вод»,. 432008, г. Ульяновск,
Московское шоссе, 94, тел. 8-(8422)-32-67-12,
[email protected].
mailto:[email protected]
-
17
УДК 811.111
КЛАССИФИКАЦИЯ ТЕРМИНОЛОГИЧЕСКИХ ГРУПП В ЛЕКСИКЕ СИСТЕМЫ
ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ
СРЕДНЕГО РАДИУСА ДЕЙСТВИЯ
М. В. Ртищев, В. И. Филимонов
С расширением военно-технического сотрудничества России с
дру-гими странами системы противовоздушной обороны среднего радиуса
действия (ПВО СРД) становятся весомой статьёй российского экспорта.
При этом важным становится вопрос языкового «интерфейса» с
зарубеж-ными партнёрами по технической документации, при обучении
обслужи-вающего и эксплуатирующего военную технику персонала, а
также при приёмно-сдаточных испытаниях и гарантийном обслуживании.
Лексика сложных технических систем данного класса весьма
разветвлена и охваты-вает многие области научных знаний и техники.
В ряде случаев один и тот же термин в одном языке имеют «сквозное»
прохождение по нескольким техническим областями, однако в
иноязычной лексике ему соответствуют различные терминологические
категории. Во избежание смешения терми-нов и смысловых ошибок
перевода следует установить классификацию, по крайней мере,
терминологических групп с целью создания в дальнейшем
специализированных компендиумов, которые могут использоваться при
«вхождении» переводчиков в предметную область, при переводе
техниче-ской документации и обучении иностранных специалистов.
Представляет-ся целесообразным проведение пропедевтических занятий
по лексике предметной области при рассмотрении базовых понятий и
основ функцио-нирования той или иной системы при обучении
специалистов.
В терминологическую группу физических и технических принципов
локации включаются основные параметры устройств излучения волн, их
принятия и обработки, используемые критерии оценки и характеристики
излучений, различные общепринятые коэффициенты по видам излучений и
пр. Отдельно рассматриваются условия работы устройств, включая
влияние погодных воздействий, характера местности, требования к
разме-щению устройств, влияние излучений на обслуживающий персонал,
тре-бования в связи с влиянием механических, температурных и других
воз-действий. Специально предусмотрено рассмотрение терминологии
волно-вой оптики, включающей также электромагнитные волны различных
уров-ней частот. Эти терминологические единицы являются ключевыми
для по-нимания функционирования радиорелейной техники.
Блок, отражающий конструкцию огневых и технических средств,
включает общее описание средств ПВО и сопутствующих категорий и
по-
-
18
нятий, например, «дальность обнаружения», «пеленг», «наведение
по уг-лу», «захват», «подсвет», «вероятность поражения» и др. Так
как средства ПВО СРД выполняются подвижными во избежание
уязвимости, то аппара-туру обычно размещают на подвижных средствах
(машинах).
Поэтому в блок конструкции огневых и технических средств
вклю-чено описание их интерьера (отсеков, их назначения,
расположения орга-нов управления и их назначения и пр.), а также
внешнего вида подвижных средств (кабины, кузова, навесных устройств
и т.д.). Отдельным блоком представлена терминология по ходовой
части подвижных средств, вклю-чающая терминологию авто- и
тракторостроения, вплоть до лексики по различным системам.
Рассмотренные подгруппы включают, в основном, общую лексику по
подвижным средствам, в то время как терминологиче-ская подгруппа
огневых средств охватывает преимущественно системы обеспечения их
боевой работы (системы питания, излучения и приёма сиг-налов,
обработки информации, выработки решений, наведения, пуска ра-кет).
Сюда входят термины, отражающие конструктивное исполнение
уст-ройств, а также описательные категории их функционирования.
Подгруппа терминов, относящихся к техническим средствам, отражает
конструкцию и работу технических средств обслуживания и ремонта
всех средств системы ПВО СРД. Сюда включены термины по аппаратуре и
инструментам, горю-че-смазочным и другим расходным материалам.
Курс обучения иностранных специалистов обычно включает раздел по
тактике и логистике в системе ПВО. Поэтому в классификаторе
преду-смотрен терминологический блок, отражающий эти виды
деятельности. В подгруппе «особенности местности» отражается
терминология, относя-щаяся к обозначению видов местности,
естественных и искусственных преград (горы, холмы, леса, броды,
мосты, виды дорог и пр.). В термино-логический блок расположения
входят термины по расположению и опи-санию основных логистических
средств (склады, пункты питания, транс-портные средства и
т.д.).
Что касается непосредственно эксплуатации и обслуживания
техни-ки, то данный раздел включает в себя целый ряд блоков,
значения терми-нов которых могут отличаться от представленных в
других блоках (Физи-ческие и технические принципы локации,
Конструкция огневых и техниче-ских средств). Это связано в первую
очередь с тем, что в ходе эксплуата-ции военной техники могут
возникнуть ситуации, при которых одно и то же явление по-разному
интерпретируется. Каждая подгруппа в данном блоке отражает все
этапы эксплуатации техники с момента ее поступления к заказчику.
Одним из первых этапов в эксплуатации является обучение персонала
для работы на технике. Данная подгруппа терминов охватывает лишь
небольшую часть лексики, связанную в основном с непосредствен-ной
эксплуатацией и минимальным обслуживанием боевых единиц.
-
19
При этом понятия и определения в данном случае должны быть
макси-мально унифицированы с минимальными оттенками полисемии.
Термины гарантийного и пост-гарантийного обслуживания могут
пересекаться с подгруппой «Юридические вопросы» раздела
«Военно-техническое со-трудничество». Это связано с тем, что
условия и сроки этих видов обслу-живания обговариваются на стадии
заключения контрактов и договоров. На этом этапе данная подгруппа
также включает себя и лексику подгруппы «Инструменты и
оборудование», т.к. зачастую работы, выполняемые при гарантийном и
пост-гарантийном ремонте и обслуживании, ведутся с ис-пользованием
специальных средств и исключают использование так назы-ваемых
ЗИПов, поставляемых в комплекте с техникой. Отдельной под-группой в
данном разделе можно выделить «Запасные части». Эта под-группа
включает в себя термины, напрямую связанные с эксплуатацией техники
в боевых частях. Терминология данной подгруппы независима от других
разделов и допускает полисемию. При этом терминологическая ба-за
ЗИП составляется непосредственно производителем техники.
Таким образом, разработанный классификатор позволяет
произво-дить разработку компендиумов по терминологическим группам
со сквоз-ной однозначной терминологической «прошивкой» для
существенного по-вышения качества разрабатываемой документации,
обучения иностранных специалистов и лучшего взаимопонимания
специалистов, осуществляю-щих эксплуатацию систем, гарантийное и
пост-гарантийное обслуживание.
Ртищев Максим Викторович, переводчик бюро переводов ЦПППСИ ОАО
«Ульяновский механический завод» Филимонов Вячеслав Иванович, д-р
техн. наук, профессор, начальник бюро ЦПППСИ ОАО «Ульяновский
механический завод» УДК 621.396.933
ПРОБЛЕМЫ РАЗРАБОТКИ СОВРЕМЕННОЙ АВИАЦИОННОЙ БОРТОВОЙ АППАРАТУРЫ
ВТОРИЧНОЙ РАДИОЛОКАЦИИ
ДЛЯ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ
Р. В. Поликашкин, К. В. Филиппов, В. Г. Соколов, С. Б. Вахрушев,
Н. В. Веселкова
Для обнаружения самолетов в воздушном пространстве и
управления
воздушным движением, наряду с первичными обзорными
радиолокатора-ми (принимающими отраженный от самолета сигнал),
используются вто-ричные радиолокаторы, рассчитанные на активный
ответ от интересующе-
-
20
го летательного аппарата (ЛА). Широкое распространение в
Российской Федерации получила международная система ATC RBS (air
traffic control radio beacon system), работающая на частотах
D-диапазона (1030 и 1090 МГц) в основных режимах «А» (передача
идентификационного кода ЛА), «С» (передача кода высоты) и «S»
(адресный режим с богатыми информа-ционными возможностями).
Отличительной особенностью режима «S» яв-ляется адресация
запросного сигнала только конкретным ответчикам, что позволяет
снизить поток внутрисистемных помех в условиях растущей на-грузки
на канал связи. Режим «S» включает в себя расширяемые протоко-лы
передачи данных, за счет чего он может использоваться как базис для
построения сколь угодно сложных и гибких систем обмена информацией
о воздушном движении.
Одной из таких востребованных в настоящее время систем является
система автоматического зависимого наблюдения (АЗН, Automatic
Dependent Surveillance, ADS), в рамках которой каждый ЛА может
само-стоятельно, а не по запросу, передавать в эфир данные о своем
местополо-жении, скорости, маршруте и т.п. – своего рода
«авиационный Интернет». Внедрение системы АЗН в Российской
Федерации позволило бы решить многие проблемы, связанные с
развитием инфраструктуры наземных стан-ций и оснащением новых и
модернизируемых ЛА компактными недороги-ми ответчиками, повысить
информативность и снизить влияние человече-ского фактора при
управлении воздушным движением.
В рамках проекта по созданию комплекса бортового оборудования
интегрированной модульной авионики (ИКБО ИМА), который реализуется
концерном «Радиоэлектронные технологии» (КРЭТ) по заказу
Минпром-торга, на ОАО «Государственный Рязанский приборный завод» в
2012 го-ду началась разработка бортового модульного
радиолокационного ответ-чика нового поколения. Целью работ по ИКБО
ИМА является [1] разра-ботка унифицированных базовых элементов
интегрированного комплекса бортового оборудования для самолетов и
вертолетов, отвечающего сле-дующим требованиям:
- высокий технический уровень и функциональность; - соответствие
международным техническим требованиям и норма-
тивным документам; - большее удобство и меньшие расходы на
эксплуатацию; - возможность адаптации под различные ЛА. За
реализацию функций управления воздушным движением в составе
ИКБО ИМА отвечает интегрированная система наблюдения (ИСН),
блоки которой выполнены в типоразмерах 1U-4U по стандарту ARINC600
и имеют модульную архитектуру. Каждый из модулей должен иметь
стан-дартные габаритно-присоединительные размеры и набор сигналов в
соот-ветствии с ANSI/VITA 46/48. Стоит отметить, что стандарты
ANSI/VITA
-
21
46/48 более применимы к средствам вычислительной техники, нежели
к радиочастотным средствам, что подтверждается большим количеством
процессорных и интерфейсных модулей различного назначения,
разрабо-танных в этом конструктиве как за рубежом, так и в РФ.
Основные состав-ляющие модуля по ANSI/VITA 46/48 показаны на
рисунке 1 [2].
Рис. 1 – Общий вид модуля в конструктиве ANSI/VITA 46/48
По сути, конструктив ANSI/VITA 46/48 совсем не предполагает
на-
личие таких необходимых для радиочастотного блока конструктивных
элементов, как коаксиальные соединители, герметичный отсек и т.д.
Также набор сигналов соединителя по ANSI/VITA 46/48 не содержит
высоких напряжений ~50В, необходимых для электропитания мощных
ВЧ-транзисторов. Наверное, по этим причинам в НИОКР по ИМА 1-го
поко-ления радиочастотные блоки предполагалось выполнять в
отдельных кон-структивах, соединенных с крейтами ИМА интерфейсами
AFDX, VITA49 и т.д. [3].
Как это часто бывает, в начале разработки модульного ответчика
пришлось искать компромисс между жесткими требованиями к
массогаба-ритным характеристикам, с одной стороны, и
схемотехническими реше-ниями и существующими технологиями – с
другой. Основным конструк-тивным решением стала реализация
ответчика в виде двух модулей:
- приемного, в состав которого входит двухканальный СВЧ-приемник
и цифровое устройство обработки сигнала на базе ПЛИС высокой
степени интеграции;
- передающего, на базе мощных радиочастотных LDMOS-транзисторов
с высоким КПД и коэффициентом усиления, в состав которо-го также
входит цифровое устройство на ПЛИС, реализующее все необхо-димые
функции управления каскадами передатчика.
Общий вид наиболее конструктивно сложного передающего модуля
показан на рисунке 2. Как видно, герметичный корпус, внутри
которого
-
22
расположены мощные СВЧ-каскады, одновременно является несущим
для всей конструкции модуля: на нем размещены клиновые механизмы
(для фиксации модуля в крейте) и закреплена печатная плата с
цифровой ча-стью и комбинированным соединителем (показан на
переднем плане). От существующих серийных соединителей
комбинированный отличается на-личием ВЧ-вставки с закрепленными в
ней коаксиальными соединителями типоразмера SMP.
Рис. 2 – Общий вид передающего модуля ответчика в конструктиве
ANSI/VITA 46/48
Как конструктивно, так и алгоритмически, ответчик представляет
со-
бой достаточно сложное изделие, достаточно сказать, что
реализация всех требований к режиму «S» и его расширениям требует
ПЛИС с количест-вом системных вентилей более 2,5 млн. и оперативной
памятью около 0,5 Мбит. Для надежного функционирования ответчика в
сложной помеховой обстановке разработан специальный алгоритм
селекции импульсов. Селекция импульсов происходит по двум каналам:
усреднения и медиан-ному. В канале усреднения происходит вычисление
среднего значения сигнала в «скользящем» окне (ширина окна равна
длительности селекти-руемых импульсов). Второй канал содержит
медианный фильтр, который обеспечивает подавление хаотических
импульсных помех малой длитель-ности. Каналы работают параллельно,
каждый канал содержит пороговое устройство. Каждое пороговое
устройство непрерывно вычисляет разность между соседними отсчетами
АЦП. Когда вычисленная разность превыша-ет пороговое значение,
формируется признак фронта или спада (в зависи-мости от знака
разности). Полученные признаки используются для форми-рования
импульса на выходе пороговой схемы.
В настоящее время в ОАО «ГРПЗ» изготовлены опытные образцы
от-ветчика, проведена отработка по основным функциональным
показателям, и завершается подготовка к наземным стендовым
испытаниям в составе интеграционных стендов ИКБО ИМА.
-
23
Литература
1. НИОКР «ИКБО ИМА – Образцы». Итоговый аннотационный отчет. М.:
ОАО «Концерн «Радиоэлектронные технологии». 2013.
2. ANSI/VITA 48.2 Mechanical Specifications for Microcomputers
Using REDI Con-duction Cooling Applied to VITA VPX.
3. Остапенко В.П. НИОКР по созданию отечественного бортового
авиационного оборудования: проблемы и перспективы внедрения.
Материалы научно-практического семинара ««Летная эксплуатация
воздушных судов». М.: ОАО «ГосНИИАС». 2012.
Поликашкин Роман Васильевич, заместитель директора
научно-технического цен-тра ОАО «Государственный Рязанский
приборный завод» e-mail [email protected]
Филиппов Константин Викторович, начальник КБ комплексного отдела
систем
навигации научно-технического центра ОАО «Государственный
Рязанский приборный завод» e-mail [email protected]
Соколов Владимир Геннадьевич, руководитель группы комплексного
отдела сис-
тем навигации научно-технического центра ОАО «Государственный
Рязанский при-борный завод» e-mail [email protected]
Вахрушев Сергей Борисович, инженер-конструктор комплексного
отдела систем
навигации научно-технического центра ОАО «Государственный
Рязанский приборный завод» e-mail [email protected]
Веселкова Наталья Владимировна, инженер-конструктор
конструкторского отде-
ла научно-технического центра ОАО «Государственный Рязанский
приборный завод» e-mail [email protected]
УДК 681.532.8:621.391 ВЫБОР РАЦИОНАЛЬНОЙ СТРУКТУРЫ ПРИВОДОВ
НАВЕДЕНИЯ
ОПОРНО-ПОВОРОТНЫХ УСТРОЙСТВ БОРТОВЫХ АНТЕНН РАДИОСВЯЗИ
В. Г. Баунин
Наведение и стабилизация направления бортовых антенн
радиосвязи
осуществляются с помощью опорно-поворотных устройств (ОПУ),
имею-щих приводы наведения в количестве, равном количеству осей
наведения.
При выборе структуры приводов наведения бортовых ОПУ необхо-димо
учитывать требования по точности наведения и стабилизации антен-ны,
требования по минимальным массогабаритным характеристикам, а также
требование по устойчивости к изменению температуры в широком
диапазоне [1].
mailto:[email protected]:[email protected]:[email protected]:[email protected]:[email protected]
-
24
Требование по минимальным массогабаритным характеристикам,
предъявляемое к аппаратуре бортового размещения, обусловило широкое
применение в бортовых ОПУ приводов наведения с исполнительными
двигателями постоянного тока с возбуждением от постоянных магнитов
[2]. Достоинствами таких приводов являются достаточно широкий выбор
выпускаемых отечественной промышленностью электродвигателей на
мощности от единиц до десятков ватт, а также простота управления
элек-тродвигателем постоянного тока, что обуславливает малые
габариты и массу аппаратуры управления.
Обобщенная структурная схема привода наведения бортовой антенны
с исполнительным двигателем постоянного тока приведена на рис.
1.
С целью обеспечения высокой динамической точности управление
приводом наведения осуществляется по принципу комбинированного
ре-гулирования с введением в закон управления первой и второй
производ-ных от заданного угла поворота антенны. Выработку сигналов
первой и второй производных осуществляет компенсирующее устройство
путем дифференцирования заданного угла поворота.
В общем случае в приводе наведения могут использоваться
внутрен-ние обратные связи по току якоря и скорости исполнительного
двигателя. Рассмотрим более подробно целесообразность введения этих
обратных связей.
Рис. 1. Обобщенная структурная схема привода наведения бортовой
антенны:
КУ – компенсирующее устройство; РП, РС, РТ – регуляторы
положения, скорости и тока; УМ – усилитель мощности; ИД –
исполнительный двигатель;
МП – механическая передача; А – антенна; КЗ1, КЗ2 –
корректирующие звенья; ДУ, ДС, ДТ – датчики угла, скорости и тока;
φз, φ – заданный и текущий углы поворота
антенны; δ – рассогласование привода наведения Уравнение ошибки
привода наведения, построенного по структурной
схеме, приведенной на рис. 1, имеет следующий вид:
-
25
( ) ( ){ }( ) ( ){ }
( )( ) ( ){ }
РТ КЗ2 Я Я Д Е М М КЗ1 РТ РС М КУ РТ РСЗ
РТ КЗ2 Я Я Д Е М М КЗ1 РТ РС М РП РТ РС
РТ КЗ2 Я ЯН
РТ КЗ2 Я Я Д Е М М КЗ1 РТ РС М РП РТ РС
1δ φ
1
1,
1
p W W R T p J p C C C W W W C W W W
p W W R T p J p C C C W W W C W W W
W W R T pM
p W W R T p J p C C C W W W C W W W
+ + + + − = ++ + + + +
+ ++
+ + + + +
(1)
где p – оператор дифференцирования; WРП, WРС, WРТ – передаточные
функ-ции регуляторов положения, скорости и тока; RЯ, TЯ – активное
сопротив-ление и электромагнитная постоянная времени якоря ИД; JД –
момент яко-ря исполнительного электродвигателя с учетом
приведенного к его валу момента инерции нагрузки; CМ, CЕ –
коэффициенты момента и противо-ЭДС ИД; WКЗ1, WКЗ2 – передаточные
функции корректирующих устройств в цепях обратных связей по
скорости и току ИД; WКУ – переда-точная функция компенсирующего
устройства; MН – момент нагрузки на валу исполнительного
двигателя.
Рассмотрим влияние корректирующих обратных связей при следую-щем
виде передаточных функций WРП, WРС, WРТ, WКЗ1, WКЗ2:
( ),;;;;1 ТОСКЗ2СОСКЗ1РТРTРСРСРПРПРП KWKWKWKWp
pTKW ====+= (2)
где KРП, KРС, KРТ – коэффициенты передачи регуляторов положения,
скоро-сти и тока ИД;
TРП – постоянная времени регулятора положения; KОС С, KОС Т –
коэффициенты передачи обратных связей по скорости и
току ИД. После подстановки выражений (2) уравнение (1) принимает
следую-
щий вид:
( )
( ) ( )
( )
( ) ( ),
11
1
φ
11
1
δ
Н
РПРСРТРПМЯTОСРТДЯTОСРТ
ЯЯ2
ЯTОСРТ
ЯЯЯTОСРТ
З
РПРСРТРПМЯTОСРТДЯTОСРТ
ЯЯ2
РСРТКУМЯTОСРТДЯTОСРТ
ЯЯ2
M
pTKKKCApRKKJRKK
pTRp
RKKpTRRKKp
pTKKKCApRKKJRKK
pTRp
pKKWCApRKKJRKK
pTRp
++
++
+
+
+
++
+
+
++
++
+
+
−
++
+
+=
(3)
где ( )РСРТCОСММЕ KKKCCCA += . Как видно из уравнения (3), при
введении обратной связи по току ис-
полнительного двигателя уменьшается влияние электромагнитной
посто-
-
26
янной времени ИД, но в то же время увеличивается составляющая
ошибки привода от действия нагрузочного момента.
Как правило, электромагнитная постоянная времени исполнительных
электродвигателей постоянного тока малой мощности не превышает 1 мс
и не оказывает существенного влияния на динамику привода. В связи с
этим введение обратной связи по току исполнительного двигателя
следует при-знать нецелесообразным, т.к. при этом происходит
увеличение моментной ошибки привода.
При отсутствии отрицательной обратной связи по току ИД (KРТ=1,
KОС Т=0) уравнение ошибки привода наведения принимает следующий
вид:
( )
( )
( ) ,11
1
φ1
1
1δ
Н
Е
РПРСРПМ2ЯМ2
МЕ
ЯЯ
З
Е
РПРСРПМ2ЯМ2
Е
РСКУМ2ЯМ2
M
BCpTKK
pB
TpBTTp
BCCpTRp
BCpTKK
pB
TpBTTp
pBCKW
pB
TpBTTp
++
++
+
+
++
+
++
−
++
=
(4)
где ( )ЕРСCОС1 CKKB += ; TМ – электромеханическая постоянная
времени привода.
Как видно из уравнения (4), обратная связь по скорости ИД
позволяет уменьшить электромеханическую постоянную времени и
составляющую ошибки привода от действия момента нагрузки в (
)ЕРСCОС1 CKKB += раз. Уменьшение электромеханической постоянной
времени привода позволяет расширить его полосу пропускания, что в
свою очередь позволяет повы-сить динамическую точность наведения
антенны.
Таким образом, в результате проведенного исследования
установлено, что для обеспечения высокой точности приводов
наведения опорно-поворотных устройств бортовых антенн радиосвязи
целесообразно введе-ние в их структуру обратной связи по скорости
ИД, обеспечивающей уве-личение полосы пропускания за счет
уменьшения электромеханической постоянной времени и уменьшение
влияния на динамическую ошибку привода изменяющегося в условиях
эксплуатации момента нагрузки.
Литература
1. Б.В. Новоселов, В.Г. Баунин Управляемые опорно-поворотные
устройства ан-
тенн радиолокационных систем и комплексов радиосвязи //
Радиопромышленность. 2008. Вып. 2. С. 22 – 28.
-
27
2. Б.В. Новоселов, В.Г. Баунин Управляемые опорно-поворотные
устройства ан-тенн комплексов радиосвязи, устанавливаемых на
подвижные объекты // Актуал. про-блемы защиты и безопасности: Тр.
Десятой Всерос. науч.-практ. конф. (3-6 апр. 2007 г.). Прил. к
журналу «Изв. Рос. акад. ракетных и артиллерийских наук». Т. 4.
СПб.: НПО специальных материалов, 2007. С. 298 – 304.
Баунин Владимир Геннадьевич, кандидат технических наук, доцент,
начальник от-
дела ОАО «ВНИИ «Сигнал», 601903, г. Ковров Владимирской обл.,
ул. Крупской, д. 57, тел. (49232) 9-02-14. e-mail:
[email protected]. УДК 621.396.96
РАЗРАБОТКА СПОСОБА ПОДАВЛЕНИЯ КАНАЛОВ УГЛОВОЙ АВТОМАТИКИ ГОЛОВКИ
САМОНАВЕДЕНИЯ
ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ В ИНТЕРЕСАХ ЗАЩИТЫ
РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
С. А. Успенский, Ю. В. Савутов, А. А. Черемшанцев
Способ защиты РЛС ЗРК СД от ПРР на основе использования до-
полнительного источника излучения (ДИИ) является пассивным
способом защиты РЛС от самонаводящегося оружия, и в частности, от
противора-диолокационных ракет (ПРР), оснащенных пассивными
радиолокацион-ными головками самонаведения (ГСН), значительно
повышающий надеж-ность защиты РЛС методом увода ПРР в точку
фиктивного излучения, на-ходящуюся на дальности от РЛС более 100 м;
с возможностью сохранения маневренности и автономности ЗРК;
одновременно уменьшающий стои-мость применяемых технич