-
単振動の運動方程式 6/11/13
天井から吊した振り子やバネの先に付けた錘の運動は、単振動の運動方程式を満たす。最も単純な系は理想的なバネである。右図のように、質量の無視できるバネの先端に付けた質量
m の質点の平衡位置 x0 から x = x'- x0 だけバネが伸ばされると、それに比例した平衡位置へ戻ろうとする復元力 F=
–kx が質点に働く。従って、運動方程式は、d2x/dt2 = F/m = – (k/m)x!
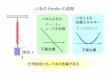
(1)となる。 同様に図2の様に、天井から吊した質量の無視できる長さ ! の糸の先端に質量 m
の質点を付けた振子も、振動の振幅が小さい場合には、近似的に単振動と考えて解析することが出来る。振り子の運動は、点線で表した弧 s
上に限定された束縛運動なので、弧に沿って定義された曲線座標上の運動を考える。曲線座標上の運動は加速度系であり,見掛けの力の遠心力が現れる注1)。従って、糸の張力は,質点に働く遠心力と重力の糸方向成分
mg cos! の和に等しく、質点の運動には寄与しない。そこで,接線方向の力 Fs = –mg sin! が s
方向の運動方程式を与える。弧上の変位 s は、振り子の平衡位置からの振れ角 ! と s = !!
の関係にあるので、運動方程式は、d2s/dt2= !d2!/dt2=F/m = – g sin!! (2)
となる。ここで、! = 一定、を使った。!
-
2)エネルギー積分を使う方法 エネルギー積分とは、運動方程式m d2x/dt2 = – kx
を積分する際に、両辺に速度 v=dx/dt
を掛けて積分する方法を指す。その結果がエネルギーの次元を持つ事から、エネルギー積分と呼ばれる。
mvd2x
dt2=!kxv=!kxdx
dt
mvddt
dxdt
!
" #
$
% & =mv
dvdt
='kxdxdt! (5)
両辺に dt を掛けて積分すると、
mv2
2=m vdv! ="k xdx! ="kx
2
2+const.! (6)
が得られる。左辺は錘の運動エネルギーを、右辺の第1項はバネの位置エネルギーを表し、左辺に移項すると、全運動エネルギーが時間によらず一定、というエネルギー保存則になっている事が分かる。積分定数を
kC2/2 と書き換えると、
dxdt
!
" #
$
% & 2
= km
(C2 ' x2) = (02(C2 ' x2)、
dxdt
= ±!0 C2 " x2 ! (7)
と変形できる。最後の式を見ると、右辺は x のみの関数なので、両辺を
C2!x2 で割って dt を掛けると変数が両辺に分離され、両辺を積分することが出来る(変数分離法)。
dx
C2!x2" = ±#0 dt" = ±#0t ! (8) 左辺の積分を進めるために変数変換を行う。x = Csin!
と置くと、dx = Ccos! d! なので、(8) の左辺は、
dx
C2!x2" = Ccos#d#
C2!C2 sin2#" = d#=# =sin!1 xC
$
% &
'
( ) " (逆三角関数)
と積分でき、位相角 ! に等しいことが分かる。t # 0 に対応して ! # 0 の領域を選べば
!="0 dt# ="0t +$より、単振動の一般解としてx = Csin("0t + #)
が得られる。
Csin !0t + "( ) = C cos"sin!0t + sin"cos!0t( )
= Asin!0t + Bcos!0t、 (A=Ccos#、B=Csin#)から、1)で求めた一般解に等しい解が求まる。
3)特性方程式による方法 一つの変数の高階の線形微分方程式に用いられる特性方程式を用いて解くことが出来る。運動方程式d2x/dt2 +
"02x = 0
に試行関数として e!t を代入して得られる特性方程式の解から必要な数の特解を得る: ($2 + "02)e!t = 0
e!t として 0 でない解を得る条件として$2 = –"02、$ = ±i"0が得られる。これより,2つの特解
x = ei"0t および e–i"0t
が求まったことになる。2階微分方程式の一般解は、2つの特解の線形結合で与えられるので、一般解として、
x = Aei"0t + Be–i"0t
が得られる。e±i"0t = cos"0t ± i sin"0t (逆に解くと、cos"0t =(ei"0t + e–i"0t)
/2、sin"0t =
(ei"0t – e–i"0t) /2i )を代入すると、x = (A+B) cos"0t + i (A–B)
sin"0t
と変形される。変位 x は実数でなければいけないので、A–B は純虚数、即ち、A と B
は複素共役の関係になっていなければならない。ここで、A = Ar + iAiとすると、虚部のみに負号を付けて A* = Ar –
iAiと表現し、A* を A の複素共役、complex conjugate と呼ぶ。時には頭文字を取り、 c.c.
と略すこともある。結局、x = (A+A*) cos"0t + (A–A*) sin"0t = 2Ar cos"0t + 2Ai
sin"0t
と1)で得た一般解と同一の形が得られる。
-
4)エネルギー積分による振子の解 振子の運動方程式はd2!/dt2 = – (g /l) sin!
と書ける。両辺に速度 v=ld!/dt を掛けて、左辺を " に変換すると、
d!dt
"
# $
%
& ' d2!
dt2=( g
ld!dt
sin!
d!dt
"
# $
%
& '
ddt
d!dt
"
# $
%
& ' =(
d(dt
=) gl
d!dt
sin!! (5)
となり、更に、両辺に dt を掛けて積分すると、
!2
2= !d!" =# g
lsin$d$" = g
l(cos$+ C).! (6)
が得られる(右辺は「常に正」に注意:! 0)。"=0 の時、cos!+C=0 より、C=–cos!m である。左辺を !
に戻して、
d!dt
"
# $
%
& ' 2
= 2 gl
(C + cos!)、
d!dt
= ± 2gl
C + cos! = ± 2gl
C +1"2sin2(! / 2) = ±2 gl
k2 "sin2(! / 2) ! (7)
と変形できる(2k2 = C+1 > 0、故に、k=sin(!m/2))。最後の式を見ると、右辺は ! のみ
の関数なので、両辺を
k2 !sin2(" / 2)で割って dt を掛けると変数が両辺に分離され、両辺を積分することが出来る(変数分離法)。
d!
k2"sin2(! / 2)# = ±2 gl dt# = ±2
gl
t ! (8)
左辺の変数変換を次のように行う。積分範囲は、! の範囲に依存し、!=!m までの場合は、# = %/2
に相当する。sin(!/2) = ksin# = sin(!m/2)sin#
と置き両辺を # で微分し、(1/2)cos(!/2) d! = (1/2)
1!sin2(" / 2)d"= kcos# d# から、
d!= 2kcos"d"
1#sin2(! / 2)
= 2kcos!d!
1"k2sin2 ! が得られ,(8) の左辺は、
2kcos!d!
kcos! 1"k2 sin2!0
!# = 2d!1"k2 sin2!0
!#
となり、(両辺を2で除して)第1種の楕円積分
d!
1"k2 sin2!0
!# = ± gl t
を得る。振動の周期を計算する為には、# = 0 から %/2 (!= 0
から!m)に取り、4倍すれば良い。これをテーラー展開すれば、単振動からのずれを計算出来る。
-
調和振動子
単振動する系においては、変位に比例する復元力F = –kx
が働く。従って、変位すると運動エネルギーにより仕事をし、その分の位置エネルギー U を得る:
W = F•dx0
x! ="k xdx0
x! ="kx2
2="U .
運動エネルギーと位置エネルギーの和は、
E = T +U = P2
2m+ kx
2
2= T0 (=P02/2m) = U0 (=kx02/2)
で与えられる。ここで、P0 は変位が0の時の最大運動量で、x0 は速度が0の時の最大変
位を表す。バネ定数 k を固有振動数 "0 で表すと、
E = P2
2m+
m!02x2
2= mv
2
2+
m!02x2
2
となる。単振動の場合には、変位(例えば、x = x0 cos"0t )を微分して速度を得るが、そ
の際に、係数として "0 が出てくることを考慮すると、全運動エネルギーが時間に依存しないことは直ぐに分かる。
注1) 直交座標(実験室系或は慣性系から観測する事に対応)で表した単振子の運動方程式を、曲線座標表示に変換してみよう。そうすると、加速度系で単振子の運動を観測する事に対応して、「見掛の力:遠心力」が現れる。
直交座標の原点を天井に取り、 x-軸、y-軸を右図の様に取る。そうすると、運動方程式は、md2x/dt2 = –T sinθ
md2y/dt2 = mg – T cosθ で与えられる。これを、曲線座標系に変換するために、(x, y) を (r, θ)
で置き換える:x = r sinθ、y = r
cosθ、 これらを時間で2回微分して直交座標系の運動方程式に代入するとmd2x/dt2 = mr(d2θ/dt2) cosθ –
mr(dθ/dt)2 sinθ = –T sinθ md2y/dt2 = –mr(d2θ/dt2) sinθ –
mr(dθ/dt)2 cosθ = mg – T cosθ が得られる。この式を、s = rθ で置き換えると、加速度 as と速度
vs を使って、mas cosθ – (mvs2/r) sinθ = –T sinθ ! A)–mas sinθ –
(mvs2/r) cosθ = mg – T cosθ ! B)とも表せる。第1項は、それぞれ加速度の x, y
成分を、第2項は、遠心力の x, y 成分を与えている事が分かる。
s-軸上の振子の運動と常に直交する張力を消去すると、s-軸上の運動方程式が得られる: A) x cosθ – B) x
sinθ より、m(d2s/dt2) = mg sinθ、 d2s/dt2 = ld2θ/dt2 = g sinθ、d2θ/dt2 =
(g/l) sinθ、 また、張力 T に付いて解くために、A) x sinθ + B) x cosθ より、– m(ds/dt)2
= mgcosθ – T が得られる。T について整理すると、張力がT = mgcosθ +
mvs2/r と求まり、重力の糸方向成分と遠心力の和に相当する。
図2:振り子と復元力
–mg sin!
!
mg cos!
mg
!
x
y
s
0
T