項 目仕 様
M-410iB/140H動作形態 多関節形ロボット制御軸 5軸 (J1,J2,J3,J4,J5)リーチ 2.85m設置形式
床置
動作範囲(最大動作速度)
(注1)
J1軸旋回 360° (140°/sec) 6.28 rad (2.44 rad/sec)J2軸回転 155°
(115°/sec) 2.71 rad (2.01 rad/sec)J3軸回転 112° (135°/sec) 1.95 rad
(2.36 rad/sec)J4軸手首振り(注2) 20° (135°/sec) 0.35 rad (2.36
rad/sec)J5軸手首回転 720° (420°/sec) 12.57 rad (7.33 rad/sec)
手首部可搬質量 最大 140kgJ2ベース部可搬質量 550kgJ3アーム部可搬質量(注3)
140kg手首許容負荷イナーシャ
J4軸 147 kg・m2 1500 kgf・cm・sec2
J5軸 53 kg・m2 540 kgf・cm・sec2
搬送能力 (注4) 1900 回/時駆動方式 ACサーボモータによる電気サーボ駆動位置繰返し精度 ± 0.2
mmロボット質量(注5) 1,200 kg
設置条件
周囲温度:0~45°C周囲湿度:通常75%RH以下(結露しないこと) 短期95%RH以下(1ヶ月以内)振動値 :0.5G以下
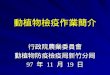
動作領域( )
仕 様項 目
仕 様
M-410iB/160 M-410iB/300動作形態 多関節形ロボット制御軸 4軸 (J1,J2,J3,J4)リーチ
3.14m設置形式 床置
動作範囲(最大動作速度)
(注1)
J1軸旋回 360° (130°/sec)6.28 rad (2.27 rad/sec)360° (85°/sec)
6.28 rad (1.48 rad/sec)
J2軸回転 144° (130°/sec)2.51 rad (2.27 rad/sec)144° (90°/sec)
2.51 rad (1.57 rad/sec)
J3軸回転 136° (135°/sec)2.37 rad (2.36 rad/sec)136° (100°/sec)
2.37 rad (1.75 rad/sec)
J4軸旋回 540° (300°/sec)9.42 rad (5.24 rad/sec)540° (190°/sec)
9.42 rad (3.32 rad/sec)手首部可搬質量 最大160 kg 最大300 kg手首許容負荷イナーシャ 78
kg・m2 800 kgf・cm・sec2 137 kg・m2 1400 kgf・cm・sec2
搬送能力 (注2) 1500 回/時 1000 回/時駆動方式 ACサーボモータによる電気サーボ駆動位置繰返し精度 ± 0.5
mmロボット質量(注3) 1940 kg
設置条件
周囲温度:0~45°C周囲湿度:通常75%RH以下
(結露しないこと) 短期95%RH以下(1ヶ月以内)振動値 :0.5G以下
項 目仕 様
M-410iB/450動作形態 多関節形ロボット制御軸 4軸 (J1,J2,J3,J4)リーチ 3.13m設置形式 床置
動作範囲(最大動作速度)
(注1)
J1軸旋回 360° (70°/sec)6.28 rad (1.22 rad/sec)
J2軸回転 145° (70°/sec)2.53 rad (1.22 rad/sec)
J3軸回転 135° (70°/sec)2.36 rad (1.22 rad/sec)
J4軸旋回 540° (180°/sec)9.42 rad (3.14 rad/sec)手首部可搬質量 最大450
kg手首許容負荷イナーシャ 196 kg・m2 2000 kgf・cm・sec2
搬送能力 (注2) 700 回/時駆動方式 ACサーボモータによる電気サーボ駆動位置繰返し精度 ± 0.5
mmロボット質量(注3) 2430 kg
設置条件
周囲温度:0~45°C周囲湿度:通常75%RH以下
(結露しないこと) 短期95%RH以下(1ヶ月以内)振動値 :0.5G以下
注1) 短い動作では各軸の最高速度に達しないことがあります。注2)
手首フランジは常時下向きとし、最大20°の幅で角度を微調整できます。注3)
J3アーム部可搬質量は、手首部負荷質量によって制限を受けます。注4)
水平移動距離2,000mm、上昇下降距離400mm、45kg負荷時。(オプション装着時)注5) 制御部質量を含みません。
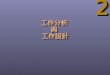
動作領域( ) 動作領域( )
注1) 短い動作では各軸の最高速度に達しないことがあります。注2)
水平移動距離2,000mm、上昇下降距離400mm、最大負荷時。注3) 制御部質量(120kg)を含む。
注1) 短い動作では各軸の最高速度に達しないことがあります。 注2)
水平移動距離2,000mm、上昇下降距離400mm、最大負荷時。 注3) 制御部質量(120kg)を含む。
仕 様 仕 様
手首先端動作領域手首先端動作領域手首先端動作領域