Embed Size (px)
Citation preview
修士論文
次期宇宙X線衛星ASTRO-Hに搭載する
硬X線・軟ガンマ線検出器の機構開発
東京大学大学院 理学系研究科 物理学専攻
修士課程 2009年度 学籍番号 35-076017
上田 剛
指導教授 牧島 一夫教授
2009年 1月 8日
目 次
1 はじめに 1
2 次期宇宙X線衛星ASTRO-H 2
2.1 衛星の概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1.1 全体構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1.2 X線光学系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1.3 検出器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 H-IIAロケット . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2.1 ロケットの概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2.2 ロケットの機械環境 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 期待される科学的成果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3.1 銀河団成長の直接観測 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.2 X線連星パルサーの降着物質の診断 . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.3 隠された巨大ブラックホールの発見 . . . . . . . . . . . . . . . . . . . . . . . . 10
3 硬X線撮像検出器 HXI 12
3.1 システムの構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 HXI-S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.1 検出器の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.2 シールド部 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.3 撮像部 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4 軟ガンマ線検出器 SGD 18
4.1 システムの構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2 SGD-S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
i
4.2.1 検出器の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.2 シールド部 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.3 検出部 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5 アクティブシールド設計の実験計画 22
5.1 BGO結晶を用いたアクティブシールド . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.2 「すざく」HXDにおけるアクティブシールドの機構設計 . . . . . . . . . . . . . . . . 23
5.2.1 HXDの構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.2.2 アクティブシールドの支持方法と問題点 . . . . . . . . . . . . . . . . . . . . . 23
5.3 HXIおよび SGDにおけるアクティブシールドの新機構 . . . . . . . . . . . . . . . . . 24
5.3.1 境界条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5.3.2 APD使用による小型化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.3.3 ねじ止め機構によるモジュール化 . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.4 実験計画 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.4.1 振動レベル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.4.2 CFRP構造体とねじのインターフェイスの課題 . . . . . . . . . . . . . . . . . 29
5.4.3 BGO結晶と CFRP構造体のインターフェイスの課題 . . . . . . . . . . . . . . 31
5.4.4 シールド全体の課題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6 ボトムシールドの機構開発 32
6.1 設計手順 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6.2 反射材の選定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6.2.1 反射材の候補:BaSO4と ESR . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6.2.2 光量の比較 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6.2.3 アウトガスの比較 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.2.4 接着強度の比較 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
ii
6.3 予備計算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.3.1 CFRP構造体とねじのインターフェイス . . . . . . . . . . . . . . . . . . . . . 36
6.3.2 BGO結晶と CFRP構造体のインターフェイス . . . . . . . . . . . . . . . . . . 37
6.3.3 シールドの共振周波数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.4 CFRP構造体の詳細設計 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.5 有限要素法を用いた強度計算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7 振動試験 47
7.1 試験内容 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.1.1 試験事項と手順 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.1.2 試験機器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.1.3 治具の製作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7.2 第 1回振動試験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7.2.1 結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7.2.2 考察および改善点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7.3 第 2回振動試験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7.3.1 試験手順と環境 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7.3.2 治具特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
7.3.3 強度試験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7.3.4 共振特性の解析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
8 今後の展望 72
8.1 熱応力の低減 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
8.1.1 CFRPとGFRPの複合材 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
8.1.2 GFRPの内在放射能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
8.2 他のブロックへの応用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
iii
9 まとめ 76
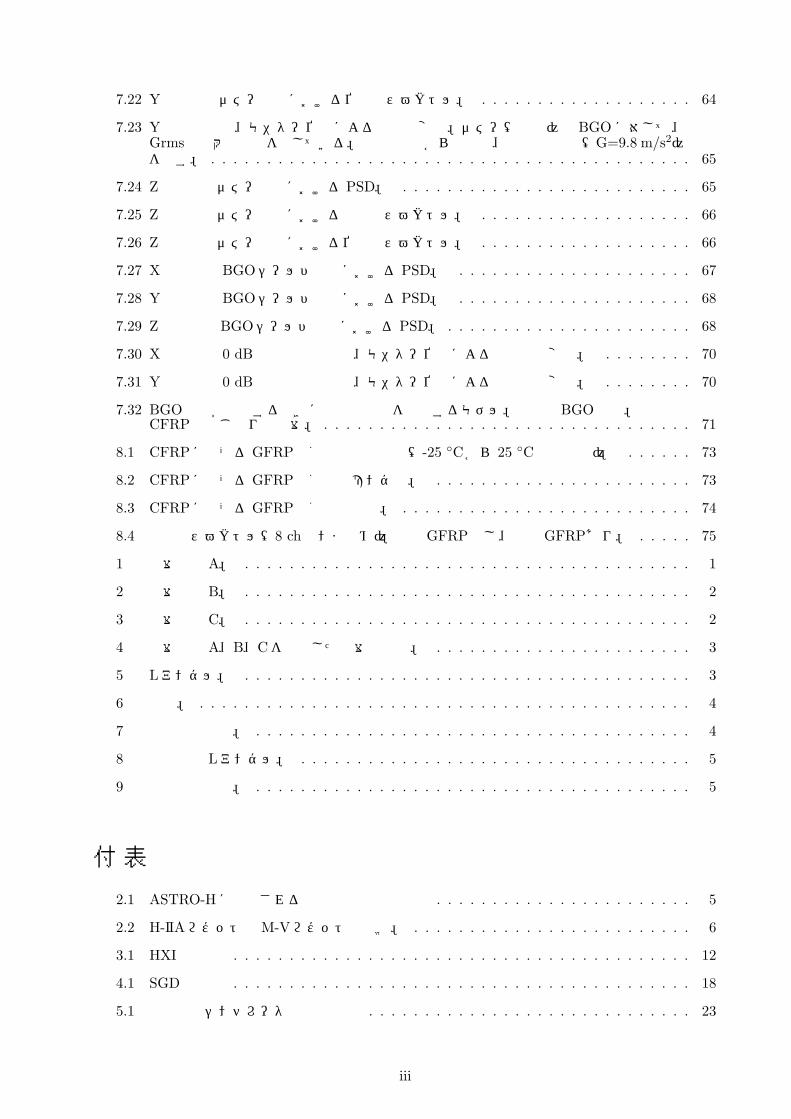
.1 ボトムシールドの CFRP構造体の設計図 . . . . . . . . . . . . . . . . . . . . . . . . . 1
.2 振動試験用治具の設計図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
.3 改良後の Lアングル設計図および側板 . . . . . . . . . . . . . . . . . . . . . . . . . . 1
iv
1 はじめに
X線宇宙物理学は高温、高エネルギーの現象を通じて宇宙における物理過程を研究する学問分野で
ある。宇宙におけるバリオン物質の ∼ 70%は 1千万度から 1億度もの高温プラズマで、X線でのみ
観測可能である。その結果、X線を用いた観測は銀河団を満たす高温プラズマの診断やそれを通じた
暗黒物質の分布の測定を可能にし、超新星残骸での元素合成の仮定を明らかにしてきた。中性子星や
ブラックホールにガスが降着するさいはおもにX線帯域に放射が現われるため、宇宙X線の観測はま
たブラックホールの存在を証明し、中性子星の磁極からサイクロトロン共鳴線を検出することで 1012
Gaussを越える強い磁場を実測するなど、コンパクト天体の研究に強力な手段となっている。さらに
X線からガンマ線にいたる広帯域の放射を電波や可視光での情報と組み合わせると、宇宙のさまざま
な現場における電子や陽子の加速を捉えることができ、宇宙線加速の謎に迫ることも可能となりつつ
ある。
日本はこうした X線宇宙物理学において、つねに世界をリードしてきた。1993年から 2001年に
かけては「あすか」衛星が、世界で初めて多重薄板型のX線反射鏡により、従来の限界であった∼ 3
keVを越える∼ 10 keVまでの集光撮像を可能にし、その焦点面に搭載されたガス蛍光比例計測管と
X線CCDカメラにより、鉄のK–輝線(∼ 7 keV)を含む広い帯域で撮像分光が可能となった。その
結果、銀河団における「クーリングフロー」学説の否定、超新星残骸のX線スペクトルの精密分光、
天の川銀河の広がった高温ガスからの X線放射、はくちょう座 X-1の降着円盤の内径と温度の測定
によるブラックホール存在の立証、中質量ブラックホールの概念の提唱、活動銀河核からの広がった
鉄輝線、超新星残骸やジェットでの粒子加速、ガンマ線バーストのX線残光スペクトルなどの観測に
より多くの成果をあげ、世界各国から 1500もの査読つき論文が出版され、160人を越える博士論文を
生みだした。さらに、2005年に打ち上げられ、現在も稼働中の「すざく」衛星は、硬X線検出器に
よる 0.2–600 keVまでの広帯域分光により、従来はガスに隠されて見えなかったブラックホールの近
傍宇宙(∼ 25 Mpc)での発見、巨大ブラックホールからの鉄輝線の相対論的な変形の測定、ブラッ
クホール周辺の逆コンプトン過程の立証、X線パルサーのサイクロトロン共鳴の測定、マグネター天
体からの ≥ 200 keVまで伸びる硬い放射の検出、銀河団での超高温のプラズマの発見、超新星残骸
での電子の加速上限や陽子加速の兆候の測定など、大きな成果を挙げている。
今回、われわれは「すざく」の後継機として、2013年に次期宇宙X線衛星ASTRO-Hを打ち上げ
予定であり、高エネルギー宇宙物理学のさらなる進展を目指す。
1
2 次期宇宙X線衛星ASTRO-H
2.1 衛星の概要
2013年に打ち上げ予定の ASTRO-H衛星、通称「NeXT」(New exporalation X-ray Telescope)
は、日本で 6番目の宇宙X線衛星であり、新たに世界で初めて、極低温ボロメータにより従来を 1桁
しのぐ 0.1%のエネルギー分解能を実現するとともに、硬 X線で集光撮像観測を行う能力を追加し、
0.3–600 keVの広帯域で「すざく」の 2桁上となる世界最高の感度を目指すものである(T. Takahashi
et al., 2008)。
2.1.1 全体構成
ASTRO-Hの概観を図 2.1に示す。総重量は 2400 kg、全長は 14 mで、「すざく」の 1.5倍の重量
となる。羽のように広がった 6枚の太陽電池により 3150 Wの発電を行う。機上には、
(1)硬X線望遠鏡(HXT)と硬X線撮像検出器(HXI)を 2個ずつ組み合わせた硬X線撮像シス
テム
(2)2個の軟ガンマ線検出器(SGD)
(3)軟X線望遠鏡(SXT-I)と軟X線撮像検出器(SXI)を組み合わせた軟X線撮像システム
(4)軟X線望遠鏡(SXT-X)と軟X線分光撮像検出器(SXS)を組み合わせた軟X線分光システム
を搭載する。それぞれの観測機器の配置を図 2.2に、基本仕様を表 2.1に示す。
2.1.2 X線光学系
ASTRO-Hは、軟X線領域では SXT、硬X線領域ではHXTという、2種類の光学系をもつ。この
うち SXTは、「すざく」のXRTと同じく金メッキされた多数のアルミ薄板を入れ子にしたものであ
り、10 keV以下で大きな集光面積をもつ。HXTも基本は SXTと同じく、メガホン状の薄板を多数
の入れ子にしたものだが、その鏡面には、ブラッグ反射を利用した「スーパーミラー」を形成するこ
とで、∼ 80 keVまでの反射と集光を可能にする画期的なものである。スーパーミラーとは、周期長
と積層数の異なる PtとCの多層膜を円錐状の薄板レプリカ基板上に積層したもので、光電吸収の効
かなくなる硬 X線領域で有効となり、有効面積は 20 keVで 500 cm2と「すざく」の約 10倍にまで
向上されている。角分解能は点源に対する画像の広がりを表すHalf Power Diameterで比較して「す
ざく」の 2′から 1′.7と改善され、焦点距離も 4.75 mから 12 mに長くすることで、高エネルギー側
での集光率を上げている。2つあるHXTの重量はそれぞれ 70–80 kg、直径は 50 cmで、HXIと組み
合わせて硬X線撮像システムとして働く。この技術は気球実験などにより実証済みである。
2
2.1.3 検出器
SXTと組み合わされる検出器は、焦点距離 6 mの位置に置かれる。その 1つである SXIは X線
CCDカメラで、「すざく」のXISの改良版である。SXIは撮像と分光を同時に行う能力があり、「す
ざく」の XISの 1.7倍となる∼ 30′の広視野をもつ。エネルギー帯域は 0.3–12 keVで、冷凍機を用
いて 150 Kまで冷却することで、放射線劣化を抑制する。
もう 1つの軟 X線焦点面検出器である SXSは、X線エネルギーを温度として検出する X線ボロ
メータであり、「すざく」で液体ヘリウムの予想外の蒸発というトラブルにより動作しなかったXRS
を改良したものである。重量は 240 kgと「すざく」XRSの半分ちかくまで軽量化され、ほとんどは
液体ヘリウムと 2段スターリング冷凍機などの冷却構造が占める。スターリング冷凍機とは、ピスト
ンによる冷媒の等温膨張などを利用した機械式冷凍機で、冷媒の気化による寿命の制約を受けない点
が特徴である。これにより検出部は 47 mKまで冷やされ、4–7 eVという高い分解能をほこる。冷媒
は 3–5年ほど持続すると見積もられている。
HXTと組み合わされるHXIは、CdTe素子と Si素子を重ねて 5–80 keVにわたる硬X線の撮像と
分光を可能とする。より高いエネルギーを受けもつ SGDは他の検出器と異なり、X線光学系を用い
ず直接に天体からの光子を受け、コンプトンカメラの原理を用いて 10–600 keVにわたり高感度でス
ペクトルと画像を取得する。この 2つについては後の第 3章と 4章で詳しく述べる。硬X線や軟ガン
マ線領域では、天体からの信号は典型的にエネルギーに対してべき関数的に減衰し、バックグラウン
ドに対して信号が微弱となる。よって高いエネルギーほど、検出器におけるバッグラウンドの低減が
精度のよい観測をするうえで不可欠であり、「すざく」衛星でも採用されたアクティブシールドがキー
となっている。本論文の主題は、このHXIおよび SGDの、アクティブシールドの機構開発である。
2.2 H-IIAロケット
2.2.1 ロケットの概要
「すざく」衛星は 2005年 7月に固体燃料を使用した 3段式のM-Vロケットで打ち上げられたが、
同ロケットの運用は、2006年 3月の 8号機による「あかり」衛星、および同 9月の 7号機による「ひ
ので」衛星の打ち上げにより終了した(機番と打ち上げの順序は必ずしも一致しない)。現在、主力大
型ロケットとして日本で用いられており、ASTRO-H衛星の打ち上げロケットとなるのが、液体燃料
を使用した日本初の純国産ロケット、H-IIAロケットである。2001年夏に試験機 1号機が打ち上げら
れて以来、実用衛星を中心に、月周回衛星「かぐや(SELENE)」や超高速インターネット衛星「き
ずな(WINDS)」など、14回中 13回の打ち上げに成功している。H-IIAロケットは重量 2 t級の衛星
打ち上げ能力をもつ 2段式ロケットであり、第 1段と第 2段の液体酸素・液体水素エンジンに加えて、
打ち上げ時に十分な推力を得るために、左右2基の固体ロケットブースターをもつ。図 2.3にH-IIA
ロケットの概観を、表 2.2にH-IIAロケットとM-Vロケットの諸元を示す。大きさや重量はM-Vロ
ケットのほぼ 2倍となり、打ち上げ能力は 5倍以上も向上している。
3
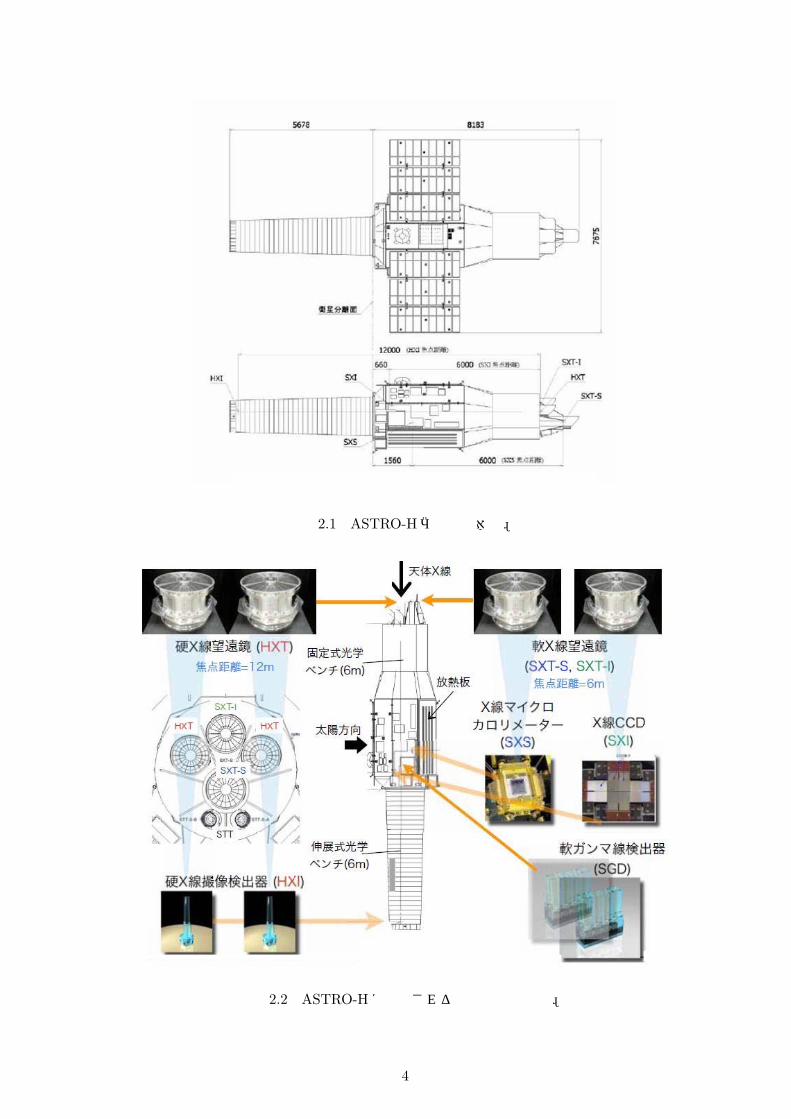
図 2.1 ASTRO-H衛星の全体図。
図 2.2 ASTRO-Hに搭載される観測機器の配置。
4
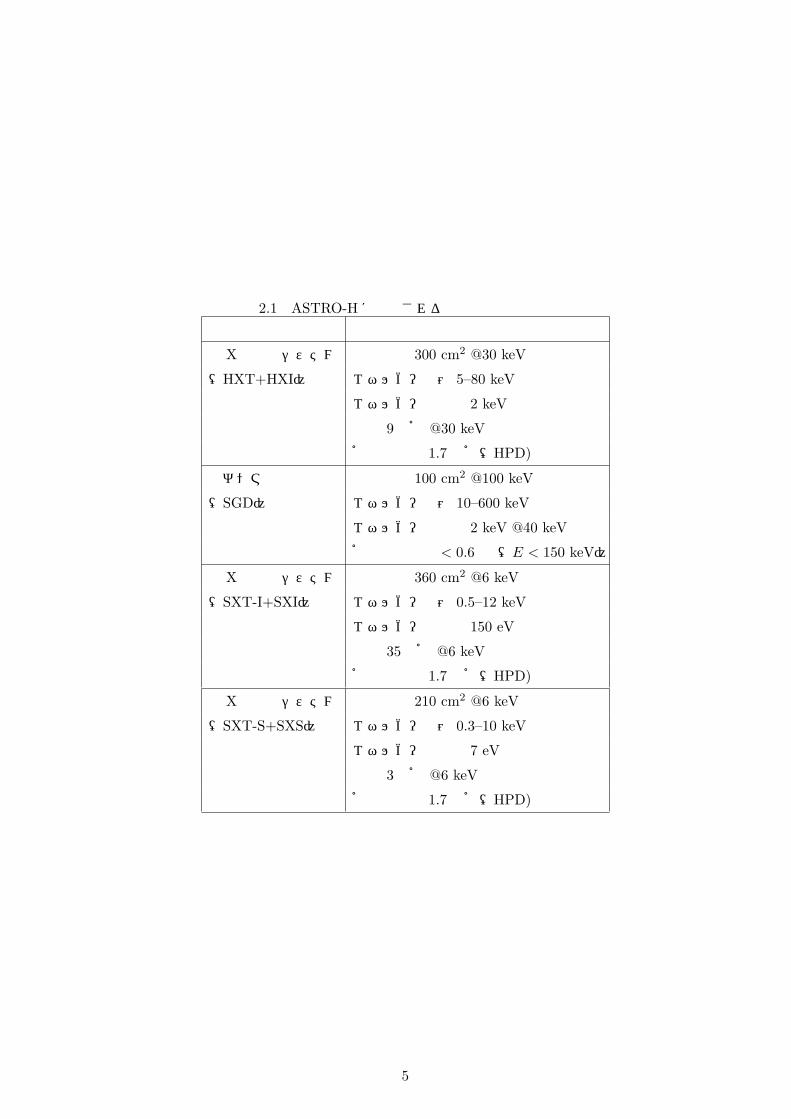
表 2.1 ASTRO-Hに搭載される観測機器の基本仕様観測機器 基本仕様
硬X線撮像システム 有効面積 300 cm2 @30 keV
(HXT+HXI) エネルギー範囲 5–80 keV
エネルギー分解能 2 keV
視野 9分角 @30 keV
角度分解能 1.7 分角(HPD)
軟ガンマ線検出器 有効面積 100 cm2 @100 keV
(SGD) エネルギー範囲 10–600 keV
エネルギー分解能 2 keV @40 keV
角度決定精度< 0.6 度 (E < 150 keV)
軟X線撮像システム 有効面積 360 cm2 @6 keV
(SXT-I+SXI) エネルギー範囲 0.5–12 keV
エネルギー分解能 150 eV
視野 35分角 @6 keV
角度分解能 1.7 分角(HPD)
軟X線分光システム 有効面積 210 cm2 @6 keV
(SXT-S+SXS) エネルギー範囲 0.3–10 keV
エネルギー分解能 7 eV
視野 3分角 @6 keV
角度分解能 1.7 分角(HPD)
5
ASTRO-H衛星はH-IIAロケットにより高度 550 km、傾斜角 31度、周期約 96分の円軌道に直接
に投入される。M-Vロケットで打ち上げられた「すざく」は、まず近地点 220 km、遠地点 550 km
程度の楕円軌道に投入された後、衛星自身のもつ液体燃料のスラスターを用いて自力で近地点高度を
上昇させ、ほぼ円軌道を達成したが、今回はロケットの打ち上げ能力が向上したため、直接の軌道投
入が可能となった。
表 2.2 H-IIAロケットとM-Vロケットの比較。H-IIA M-V
段数 2 3
全長 53 m 31 m
直径 4.0 m 2.5 m
全重量 285 t 128 t
打上げ能力1 10.0 t 1.8 t
2.2.2 ロケットの機械環境
H-IIAロケットは液体燃料ロケットであり、「すざく」を打ち上げた固体燃料ロケットであるM-V
ロケットよりは、振動や衝撃などの環境は緩いと期待される。しかし予想される環境に対し十分な耐
性を確保することは、衛星搭載機器を設計する上で、基本中の基本と言わねばならない。ロケットの
機械的な衝撃としては一般に、
(1)静荷重
(2)ランダム振動
(3)音響衝撃
(4)落下衝撃
(5)パイロ衝撃
の 5種類が挙げられる。1つめは静荷重であり、これはロケットの加速そのものである。ロケットは
燃料を消費するごとに軽くなり加速度を増し、H-IIAでは最大 4 Gに達するが、静荷重であるため一
般に大きな問題とはならない場合が多い。2つめはロケットの燃焼に伴うランダム振動であり、打ち
上げの初期に著しい。これは加速するロケットが濃い大気によって強い動圧を受け激しく振動するた
めであり、一般に機械環境の中でもっとも厳しいものとなる。3つめは音響衝撃であり、打ち上げの
初期にロケットの発するすさまじい音響が周囲の地面で反射されロケットに到達したり、音速を越え
る付近で空気振動が強められることに起因する。薄い構造のものなどは音圧で破壊されるおそれがあ
り、じっさい「あすか」衛星の GIS検出器でも検出器の入り口を保護して覆うアルミの薄膜でこの1高度 250 km、傾斜角 31度の場合。
6
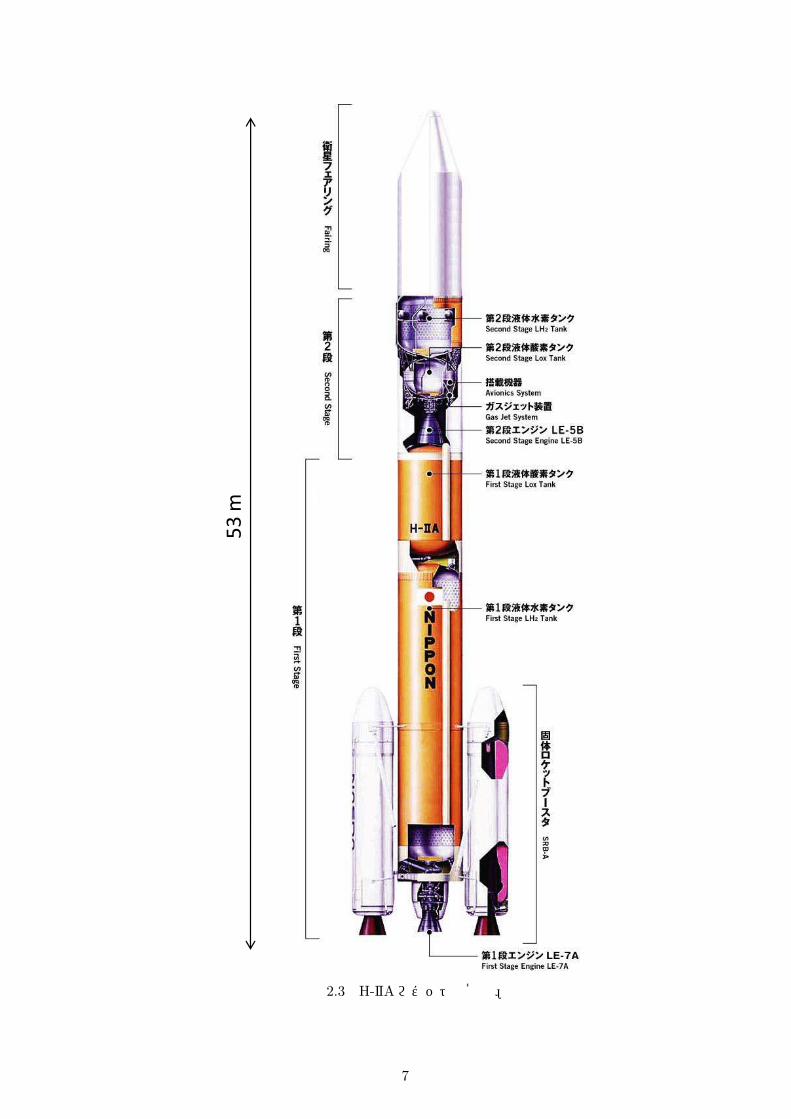
図 2.3 H-IIAロケットの概観。
7
問題が発生したことがある。またランダム振動の高周波の成分はこの音響に由来するところも大き
く、(2)と(3)の正確な切り分けは難しい部分がある。音響は空気中を伝わるため、ロケットの上
昇に伴なって気圧が低下するとともに 20秒ほどで急速に弱まる。4つめは落下衝撃とよばれるもの
で、これはロケットの各段の燃焼が終わって切り離されるときに生じるものである。このとき衛星は
約 10 msの間に数Gの加速度で推進軸方向に瞬間的に押される。ちょうど物体を軟らかい物に落下
させたときの衝撃に相当するため、このようによばれる。実際にはこの力は衛星構造に伝搬し、横方
向のショックも起こすことが多い。5つめはパイロ衝撃とよばれるもので、衛星を包むフェアリング
などを火薬によって分離するときに生じるきわめて高周波( 4000 Hz)の衝撃のことであり、衛星の
構造を伝わってくる。大型のロケットになればなるほど火薬の量は増え、パイロ衝撃も増加するとい
える。
以上のような機械環境に対し、それをシミュレートした試験によって搭載機器が打ち上げで破損し
ないことを事前に確認しなければならない。このような試験は機械環境試験とよばれ、ロケットお
よび衛星全体のシステムの担当者がその試験内容を決定する。このような試験は不必要に厳しいと
不合理であるが、打ち上げのときの衝撃を十分にシミュレートしていなくてはならない。そのため
ASTRO-Hでは「すざく」の場合と同じく、機械環境の基準は 3段階に分けられている。1つめは衛
星全体に対して加えられるレベル(システムレベル)であり、最も緩いレベルである。2つめは衛星
上において各々の搭載機器に入力される機械環境をシミュレートしたもので、サブシステムレベルと
よばれる。これはいっぱんにシステムレベルよりも厳しいが、それは 1つには衛星自体のもつ共振が
加わるためであり、第 2にはシステムレベルが AT(Acceptance Test)レベルとして完成したフラ
イト品の受け入れ試験の意味をもつのに対し、サブシステムレベルはQT(Qualification Test)レベ
ルとして搭載機器の機械設計の確認試験の側面をもつためである。これは個々の搭載機器の取り付け
場所における環境の違いを考慮して装置ごとに異なったレベルが決定されるが、現時点では SGDと
SXSでしか決まっておらず、他の機器については計算中である。最も厳しいレベルとして 3つめに、
コンポーネントレベルがある。これは個々の装置を構成する要素に対して加えられるレベルである。
これはQTレベルとしての正確をもつ上に、衛星の共振および搭載機器の共振(∼≥ 200 Hz)が上乗
せされ、場合によって搭載機器の特性のばらつき(同一部品を多数もちいる場合など)も取り込む必
要があるため、最も厳しく設定される。これら 3種類の試験レベルのうち、前二者は衛星全体のとり
まとめを行う企業が JAXA工学研究者と協力して策定するのに対し、コンポーネントレベルは搭載
構造の開発グループが自己の責任で設定することが多い。
2.3 期待される科学的成果
「すざく」に比べ ASTRO-Hには、従来を 1桁しのぐエネルギー分解能と、硬 X線で集光撮像観
測を行う能力が追加された。高いエネルギー分解能はたとえば、ブラックホールに降着する物質によ
る相対論的時空の構造の解明を可能とし、硬 X線での集光撮像はたとえば、厚い周辺物質に隠され
た遠方(過去)の巨大ブラックホールの観測を可能とする。この 2つの能力を組み合わせることに
より、銀河団の総エネルギーの観測による銀河団成長の直接観測、重力や衝突、爆発のエネルギーが
8
宇宙線を生みだす過程の解明など、多くの成果が期待されている。さらに、0.3–600 keVの広帯域で
「すざく」を 2桁上しのぐ感度でスペクトルが得られることで、今まで明るい天体でしか観測されな
かった現象が、より遠く暗い天体でも観測されることが期待され、一般的な天体現象の理解も大きく
進められるだろう。以下に、その例を示す。
2.3.1 銀河団成長の直接観測
銀河団がどのように成長したかを解明するには、ダークマターを含む銀河団の総質量を赤方偏移の
関数として求めることが有効である。銀河団の総質量を知るには、「すざく」などの従来のX線観測
で測定されてきた高温プラズマの熱的圧力に加え、プラズマ乱流やバルク運動の担う動圧、また加速
された粒子のもつ非熱的圧力などを総和し、それを閉じ込めるのに必要な総質量を計算する必要が
ある。
ASTRO-Hの SXS装置を用いると、高温プラズマからの鉄などの輝線の幅や中心エネルギーのシフ
トを光速度の∼ 0.1%まで測定することができ、銀河団プラズマの乱流やバルク運動を、∼ 300 km/s
のレベルまで知ることができる。銀河団プラズマの典型的な音速は 500–1000 km/sなので、SXSによ
り初めて、熱的圧力に比して意味のあるレベルで動圧の測定が可能となる。また、HXIや SGDのも
たらす硬X線領域の非熱的スペクトルからは、銀河団内の相対論的な電子が発する非熱的放射(逆コ
ンプトン放射、非熱的制動放射など)を検出し、こうした粒子の担う非熱的な圧力を知ることができ
る。このようにASTRO-Hを用いることで、銀河団の質量の測定は大幅に確度を増すと期待される。
2.3.2 X線連星パルサーの降着物質の診断
X線連星パルサーには一般的に、中性子星のスピン、主星と伴星の公転、降着円盤の歳差運動とい
う 3種類の周期的な変動現象が起きる。さらにある種の天体では、連星系内にある物質が視線方向を
横切りX線を吸収することにより、X線が短時間のあいだ不規則に減少することがあり、ディップ現
象と呼ばれている。
1972年にUhuru衛星により発見された、代表的なX線連星パルサーHer X-1(Tanambaum et al.
1972)では、ディップ現象の研究は 1973年のGiacconi et al.による発見から広く進められてきた。視
線を横切る吸収体が電離した物質であることが、日本で 2番目の宇宙 X線衛星「てんま」のデータ
により報告されたが(Ushimaru et al. 1989)、EXOSAT衛星のデータからは、吸収体は中性である
とされた(Raynolds and Parmer 1995)。ただし、これらの衛星のエネルギー領域はそれぞれ 2.5–35
keVと 2–17 keVであり、吸収体の電離状態を識別するのに重要な軟X線(≤ 2 keV)の情報が無かっ
たため、あい反する結果が導かれたものと思われる。
2006年に「すざく」により観測された Her X-1のデータにもディップ現象が含まれていたことか
ら、初めて同現象の 0.2–50 keVにもわたる広帯域のスペクトルが得られた。図 2.4は「すざく」衛
星で観測された、ディップの起きているときのスペクトルを起きていないときのもので割った比であ
り、ディップのさいのスペクトル変化を示している。0.3–10 keVはXISで、10–50 keVはHXDで観
9
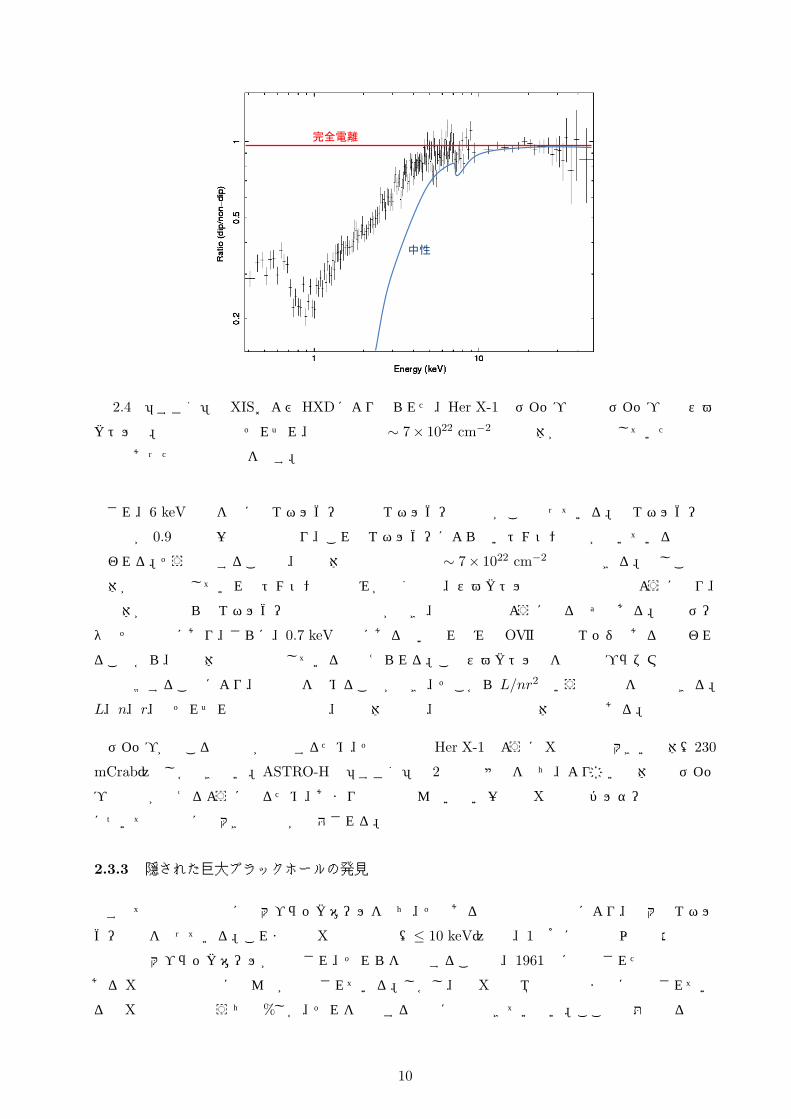
図 2.4 「すざく」のXISおよびHXDにより得られた、Her X-1のディップ時と非ディップ時のスペ
クトル比。赤と青の線はそれぞれ、水素柱密度∼ 7× 1022 cm−2の吸収体が完全電離していた場合と
中性であった場合の予想を示す。
測され、6 keV付近を境に高エネルギー側と低エネルギー側で形がことなっている。高エネルギー側
では比が 0.9程度の一定の値となり、これはエネルギーによらないトムソン散乱が効いている結果と
思われる。そう解釈することで、吸収体の水素柱密度は∼ 7× 1022 cm−2と推定できる。もしこの吸
収体が完全電離していればトムソン散乱のみが効くので、スペクトルの比は図の赤線のようになり、
吸収体が中性なら低エネルギー側では光電吸収が効き、比は青線のようになるはずである。実測デー
タはその中間にあり、さらに、0.7 keV付近にある深い切れ込みはOVIIの吸収エッジであると思われ
ることから、吸収体は部分電離していると考えられる。このスペクトル比を光電離プラズマの理論計
算と比較することにより、電離度を求めることができ、そこからL/nr2という物理量を推定できる。
L、n、r、はそれぞれ中性子星の光度、吸収体の密度、中性子星と吸収体の距離である。
ディップが起こると光量が減少するため、その解析はHer X-1のようにX線強度の大きい天体(230
mCrab)でしかできない。ASTRO-Hは「すざく」の 2桁上の感度をもち、より暗い天体でもディッ
プの解析が行えるようになるため、あまり研究の進んでいない一般の X線連星パルサーの周辺構造
についての調査にも大きな進展が期待される。
2.3.3 隠された巨大ブラックホールの発見
すべての銀河は中心に巨大ブラックホールをもち、そのあるものは質量降着により、莫大なエネル
ギー放出を行っている。これまでのX線撮像観測(≤ 10 keV)では、1度角に数千個以上の活動銀河
中心の巨大ブラックホールが発見され、それらを総和することで、1961年に発見された謎の現象で
あるX線背景放射のほとんどが説明されている。しかし、硬 X線領域では現在までに観測されてい
る硬X線背景放射のうち数%しか、それを構成する点源に分解できていない。ここで問題となる点源
10
は、厚い周辺物質に隠されたブラックホールであると考えられており、特にブラックホールが銀河の
中で生まれるころに対応していると言われている。
ASTRO-HのHXIは硬X線撮像を「すざく」より 2桁上の感度で行うため、周辺物質を突き抜け
る硬X線の観測を宇宙の遠方まで行うことができ、可視光や従来の宇宙 X線衛星ではきわめて難し
かった、隠された巨大ブラックホールの観測を行うことができる。宇宙の全ブラックホールの放出エ
ネルギーは 10–100 keVに集中していることが、宇宙X線背景放射の観測から示されており、この硬
X線は硬X線背景放射の 40–50%を担うと見積もられる。HXIにより、様々な場所や質量の、隠され
ているブラックホールを探しだし、宇宙におけるブラックホール総数を推計するとともに、そこから
放出されるエネルギー総量の推定を行うことで、硬 X線の背景放射が本当にそれらの総和で説明で
きるか、検証できると期待される。また、多くの銀河における系統的なブラックホールの観測は、巨
大ブラックホールの進化と、それらが銀河形成に果たす役割の解明に役立つ。
11
3 硬X線撮像検出器 HXI
3.1 システムの構成
硬X線撮像検出器(HXI)は、2台のHXTの焦点面に置かれる検出器で、同型の 2系統から成る
が、それらは完全に同等なので、以下では 1系統に限って話を進める。
HXIは、HXTで反射された 5–80 keVの光子を個別に検出し、∼ 2 keVの分解能でエネルギーを
測定するとともに、∼32 mm×32 mmの受光面(128ch/side)にわたり、2次元の位置を∼250 µmの
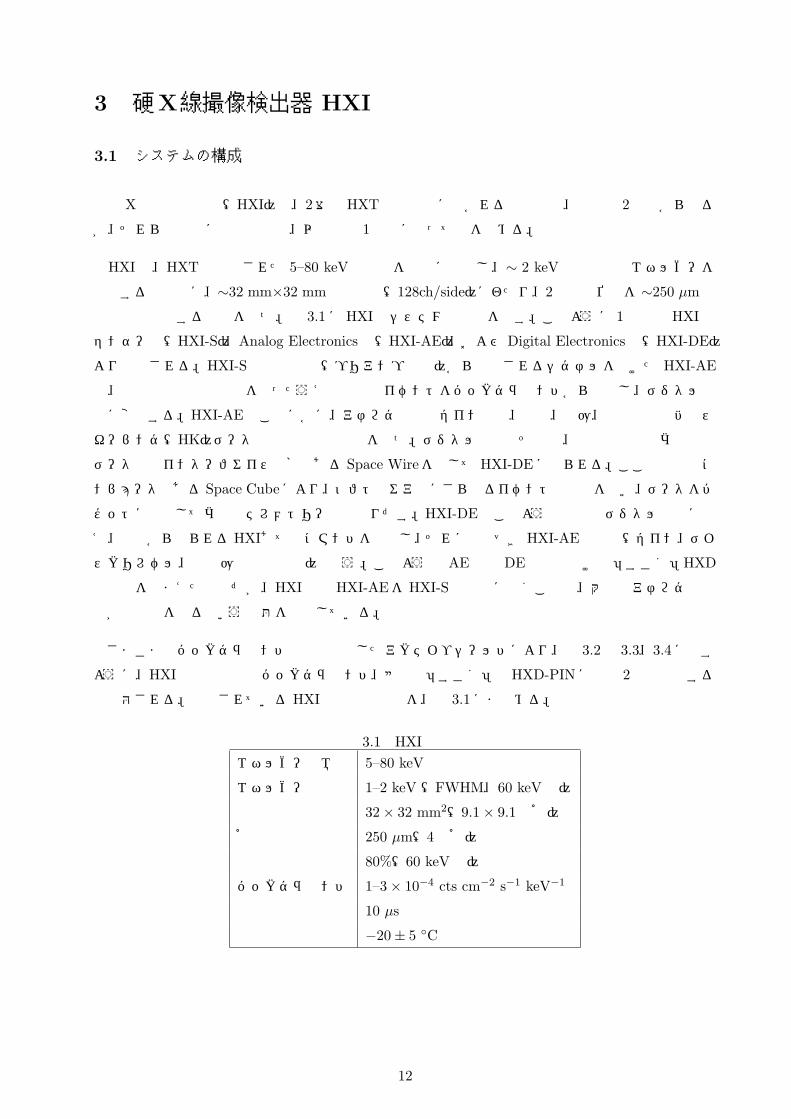
分解能で決定する能力をもつ。図 3.1にHXIのシステムの構成を示す。このように 1系統のHXIは
センサー部(HXI-S)、Analog Electronics部(HXI-AE)、およびDigital Electronics部(HXI-DE)
より構成される。HXI-Sの前置回路(プリアンプなど)から出力されるシグナルを受けた HXI-AE
は、増幅や波形整形などを行ったうえで正規のイベントをバックグラウンドから選別し、デジタル信
号に変換する。HXI-AEはこのほかに、アナログ回路のゲイン調整、電流、電圧、温度などのハウス
キーピング(HK)データの取得などの機能をもつ。デジタル信号はその後、次世代の人工衛星用の
データ通信インターフェイス規格である Space Wireを通してHXI-DEに送られる。ここでは専用コ
ンピュータである Space Cubeにより、ソフトウェア的にさらなるイベントの選別を行い、データをパ
ケットに編集して衛星のテレメトリー側へ送りだす。HXI-DEはこのような信号のデジタル処理に加
え、地上から送られるHXIあてのコマンドを解読し、それにもとづきHXI-AEの制御(ゲイン、ディ
スクリレベル、高電圧などの設定)も行う。このような AE部と DE部の仕分けは「すざく」HXD
の経験を踏まえたものだが、HXIではHXI-AEをHXI-Sの直近に置くことで、大量のアナログ信号
線が長距離を走るという問題を解消している。
さまざまなバックグラウンド設計と徹底したアクティブシールドにより、図 3.2と 3.3、3.4に示す
ように、HXIの有効面積とバックグラウンド、感度は「すざく」のHXD-PINに比べ 2桁も向上する
と期待される。計画されているHXIの性能の諸元を、表 3.1にまとめる。
表 3.1 HXIの性能エネルギー領域 5–80 keV
エネルギー分解能 1–2 keV (FWHM、60 keVで)
視野 32 × 32 mm2(9.1 × 9.1分角)
角分解能 250 µm(4秒角)
検出効率 80%(60 keVで)
バックグラウンド 1–3 × 10−4 cts cm−2 s−1 keV−1
時間精度 10 µs
作動温度 −20 ± 5 ◦C
12
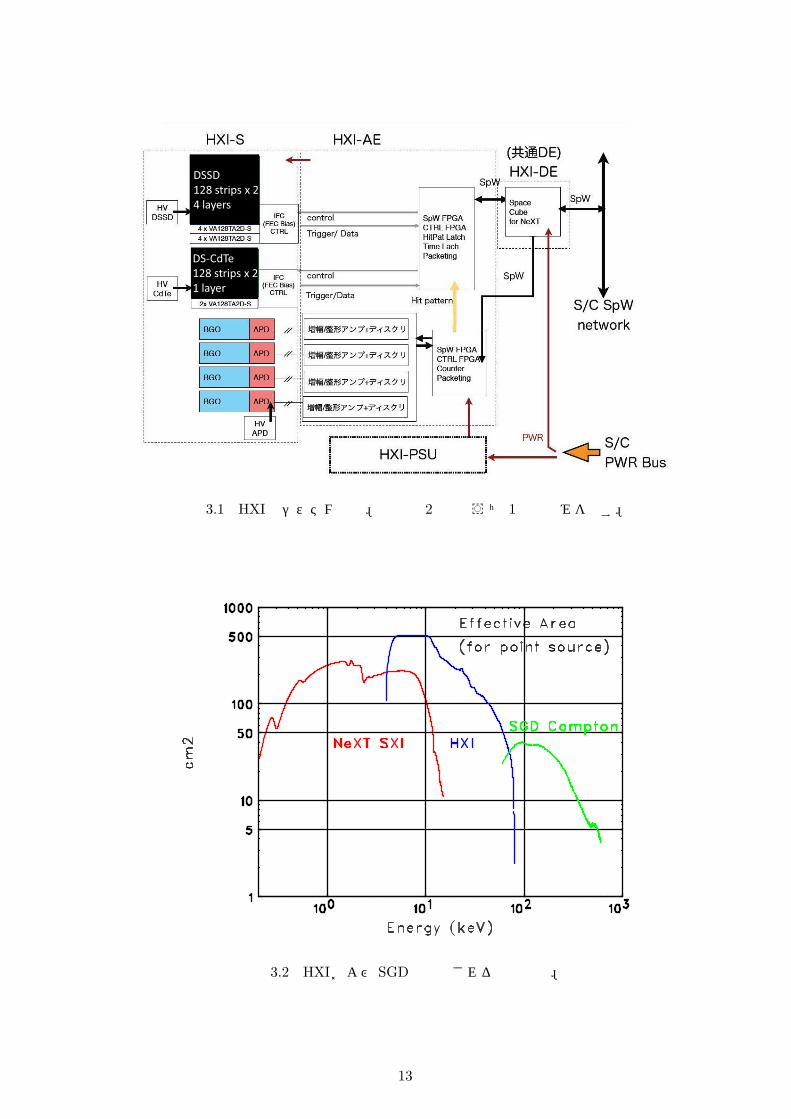
図 3.1 HXIのシステム構成。同型の 2系統のうち 1系統のみを示す。
図 3.2 HXIおよび SGDで予測される有効面積。
13
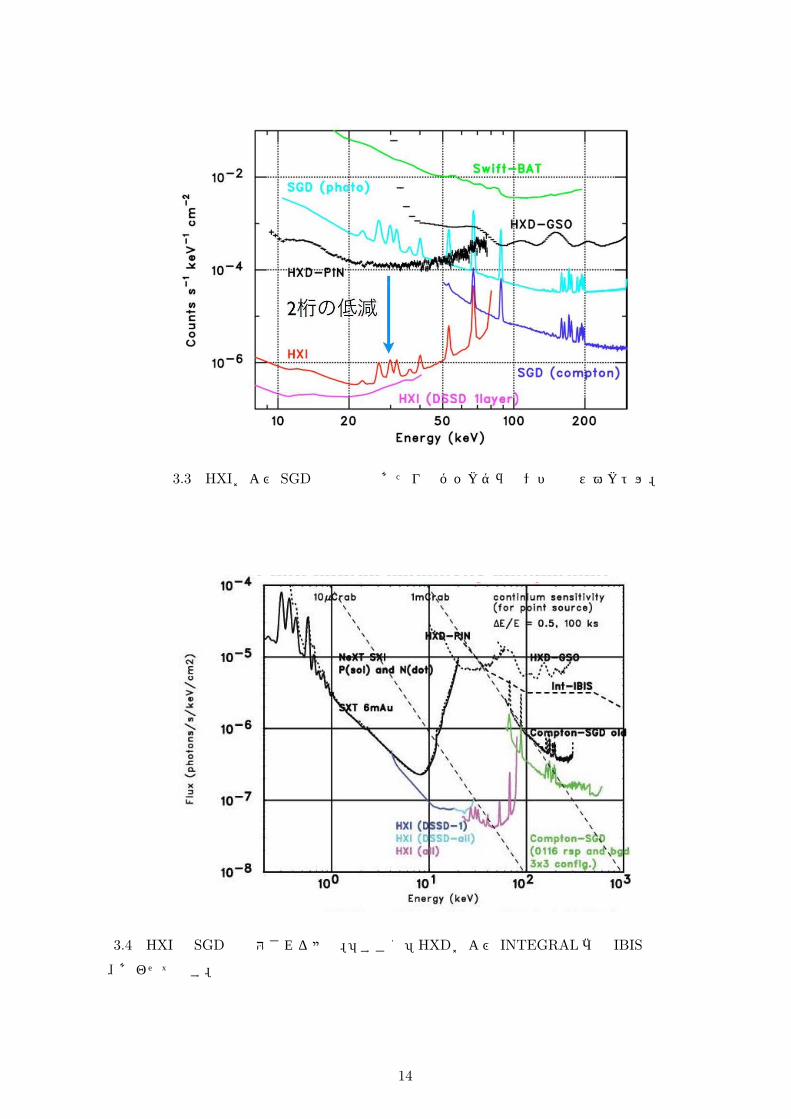
図 3.3 HXIおよび SGDの有効面積あたりのバックグラウンド予測スペクトル。
図 3.4 HXIと SGDの期待される感度。「すざく」HXDおよび INTEGRAL衛星 IBIS装置のもの
も、あわせて示す。
14
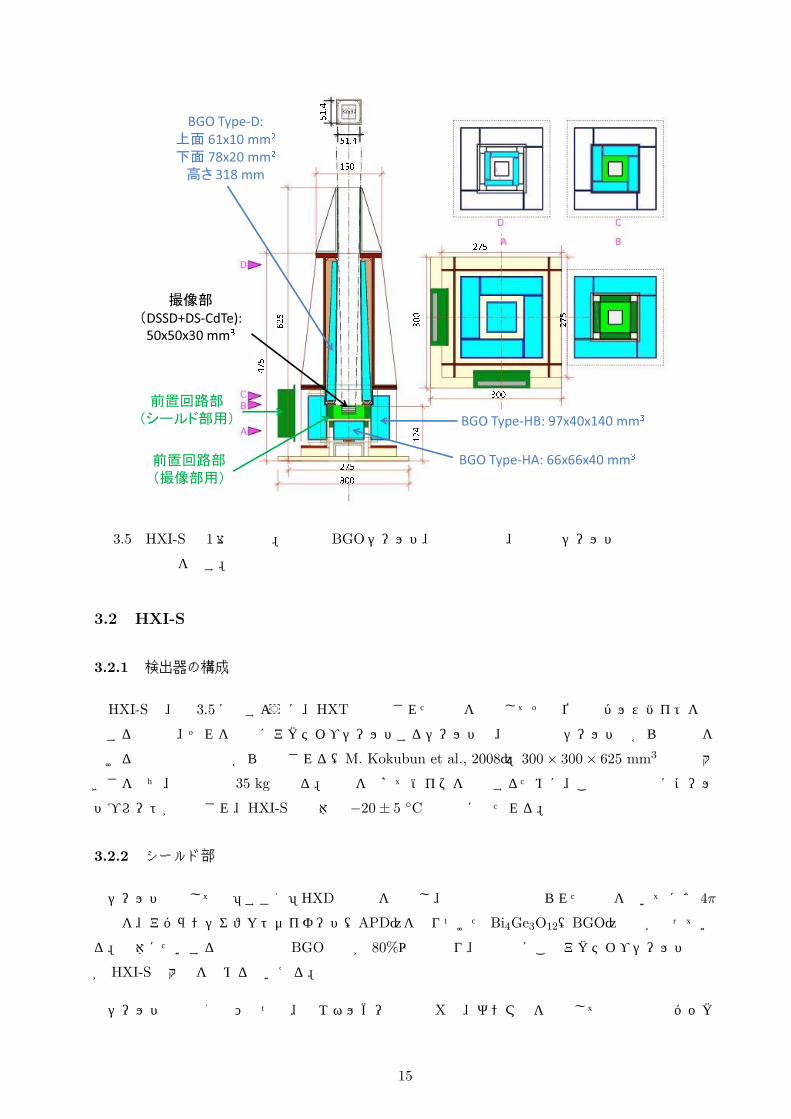
図 3.5 HXI-Sの 1台の構造。水色は BGOシールド、黒は撮像部、緑色はシールド部用と撮像部用
の前段回路部を示す。
3.2 HXI-S
3.2.1 検出器の構成
HXI-Sは、図 3.5に示すように、HXTで反射された光子を検出してその位置とパルスハイトを計
測する撮像部、それを堅固にアクティブシールドするシールド部、撮像部やシールド部からの信号を
受ける前置回路部などから構成される(M. Kokubun et al., 2008)。300 × 300 × 625 mm3程度の大
きさをもち、総重量は 35 kgとなる。温度を下げてノイズを低減するために、この構造の下にコール
ドプレートが設置され、HXI-Sの全体は−20 ± 5 ◦Cの温度に保たれる。
3.2.2 シールド部
シールド部としては「すざく」HXDの技術を改良し、撮像検出部の絞られた視野を除いてほぼ 4π
方向を、アバランシェフォトダイオード(APD)を貼りつけたBi4Ge3O12(BGO)結晶が覆ってい
る。全体にたいする重量比ではBGO結晶が 80%以上となり、実質的にこのアクティブシールド結晶
がHXI-Sの大半を占めるといえる。
シールド部の役割のひとつは、低エネルギー粒子や X線、ガンマ線を遮蔽して主検出部のバック
15
グラウンドを下げるとともに、その放射化を抑制するパッシブシールドとして働くことである。しか
しもっと重要なのはアクティブシールドとしての役割である。すなわち、視野方向以外からきた高エ
ネルギー粒子やガンマ線は、BGO結晶を突き抜けて主検出部に到達したとしても、BGO結晶で発
生した蛍光パルスを用いて反同時計数を行うことで、そうしたイベントをバックグラウンドとして落
とすことができる。さらに放射化した物質の崩壊モードからのガンマ線や、CdTeでコンプトン散乱
したガンマ線を捉えて落とすことも可能である。これはとくにコンプトン散乱の断面積が増える高エ
ネルギー側において威力を発揮する。
APDはアバランシェ増倍とよばれる現象を利用したフォトダイオードである。半導体に強い逆バ
イアスの電圧をかけることで、光子の衝突により生まれる電子が加速され、ほかの半導体原子と衝突
して複数の電子・正孔対を作り出す。この電子たちがまた加速され、ほかの原子と衝突することでさ
らに多数の電子・正孔対を励起する。この連鎖によって電子・正孔対の数が 50–100倍に増加される
現象をアバランシェ増倍とよぶ。APDはキャリアの増幅により高い感度で可視光を検出でき、しか
も光電子増倍管に比べ、はるかに薄く小型である。(J. Kataoka et al., 2005)
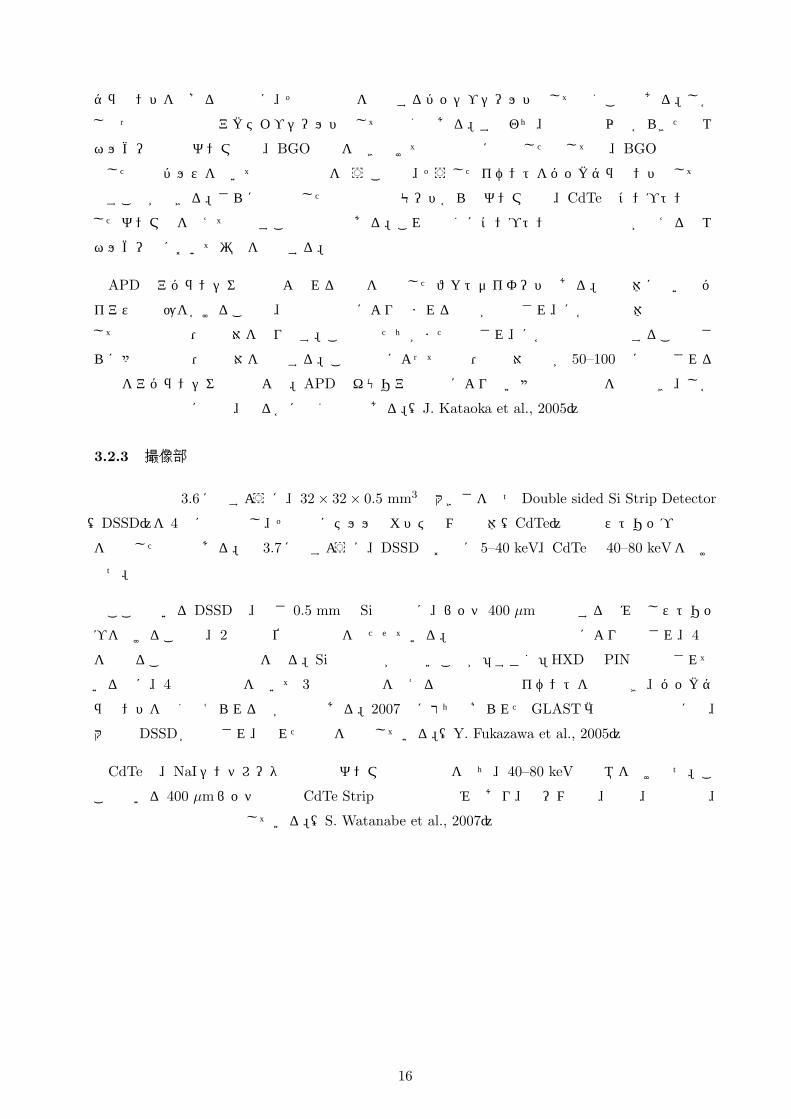
3.2.3 撮像部
撮像部は図 3.6に示すように、32 × 32 × 0.5 mm3の大きさをもつDouble sided Si Strip Detector
(DSSD)を 4層に段重ねし、その下にテルル化カドミウム半導体(CdTe)の両面ストリップ検出器
を配置したものである。図 3.7に示すように、DSSDはおもに 5–40 keV、CdTeは 40–80 keVを受け
もつ。
ここで用いるDSSDは、厚さ 0.5 mmの Siの表裏に、ピッチ 400 µmの直交する読み出しストリッ
プを設けることで、2次元の位置分解能をもたせている。信号光子は光電吸収により検出され、4層
を重ねることで効率の向上を図る。Siは放射化が少ないことが「すざく」HXDの PINで実証されて
いる上に、4層の検出部を用いて 3次元で飛跡を追えるので荷電粒子イベントを分別でき、バックグ
ラウンドを低く抑えられるのが特徴である。2007年に打ち上げられたGLAST衛星の主検出器にも、
大量のDSSDが採用され、優れた性能を発揮している。(Y. Fukazawa et al., 2005)
CdTeは、NaIシンチレータと同等のガンマ線阻止能力をもち、40–80 keVの領域を受けもつ。こ
こで用いる 400 µmピッチの両面CdTe Stripは動作実証済みであり、ビーム試験、振動、音響試験、
真空動作試験なども突破している。(S. Watanabe et al., 2007)
16
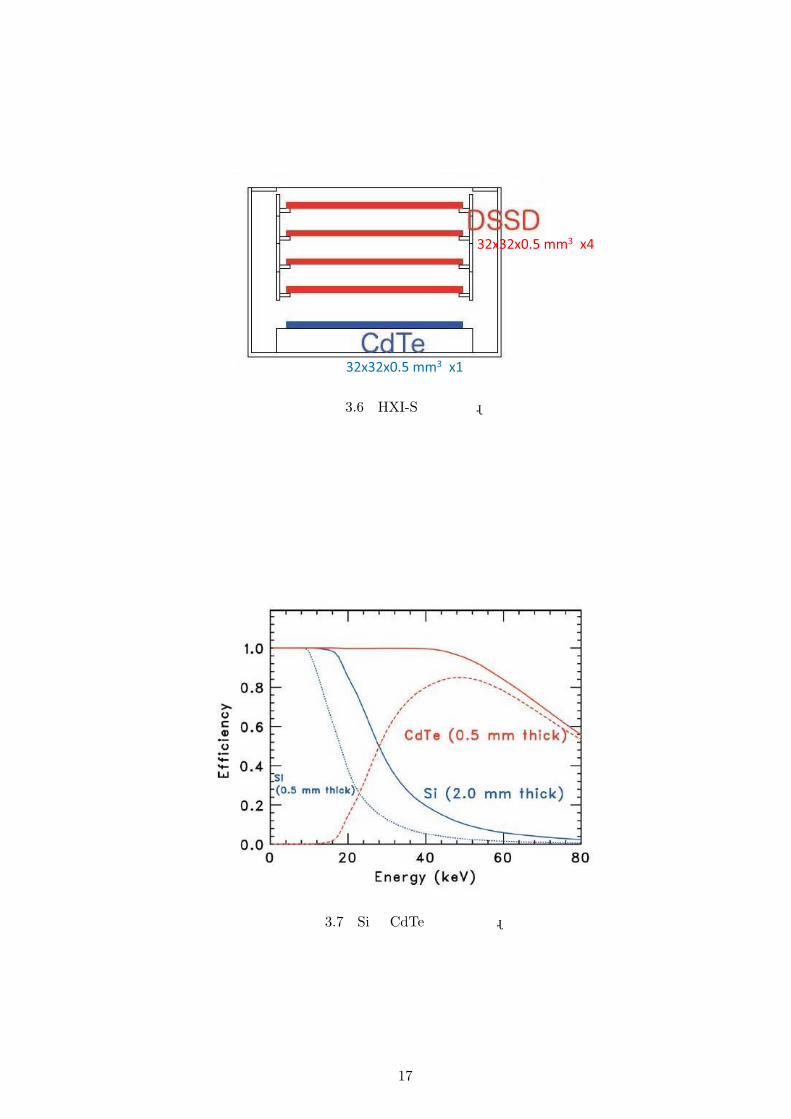
図 3.6 HXI-Sの撮像部。
図 3.7 Siと CdTeの検出効率。
17
4 軟ガンマ線検出器 SGD
4.1 システムの構成
軟ガンマ線検出器(SGD)は、ASTRO-H衛星の両側の腹部に 1台ずつ、計 2台が搭載される(図
2.2参照)。この 2系統の検出器は全く同じものである。すでに述べたように、SGDは SXTやHXT
などの全反射集光系は用いず、天体からの光子を直接に検出する。そのため有効面積をかせぐ必要が
あり、HXIに比べ大型にならざるを得ない。SGDが真価を発揮するのは、HXT(スーパーミラー)
の反射率が消失する、≥ 80 keVのエネルギー域である(H. Tajima et al., 2005)。
SGDは、10–600 keVのエネルギー領域において、BGOの井戸型シールドおよび金属製のファイ
ンコリメータにより 36 × 36分角以下(≤ 100 keV)に絞られた視野に入ってくる光子を個別に検出
する。光子は、光電効果とコンプトン散乱を併用する形で検出され、∼ 2 keVのエネルギー分解能
が達成されるとともに、≥ 60 keVではコンプトン運動学を解くことで、光子の到来方向が天球上の
小円として推定でき、それらを重ねることで、撮像が可能となる。さらに、コンプトン散乱が偏光
に依存することを利用し、光子の偏光も検出できると期待される。図 4.1に SGDのシステム構成を
示す。HXIと同じように、SGDはセンサー部(SGD-S)、Analog Electronics部(SGD-AE)、およ
びDigital Electronics部(SGD-DE)により構成され、SGD-AEや SGD-DEの役割は、HXI-AEや
HXI-DEと同様である(3.1節参照)。
SGDの有効面積やバックグラウンドと感度はそれぞれ前章の図 3.2、3.3、3.4に、HXIのものと並
べて示した。バックグラウンドは「すざく」HXDのGSOに比べて 1桁ほど低減され、感度は 2桁ち
かく向上している。期待されている SGDの性能を、表 4.1にまとめる。
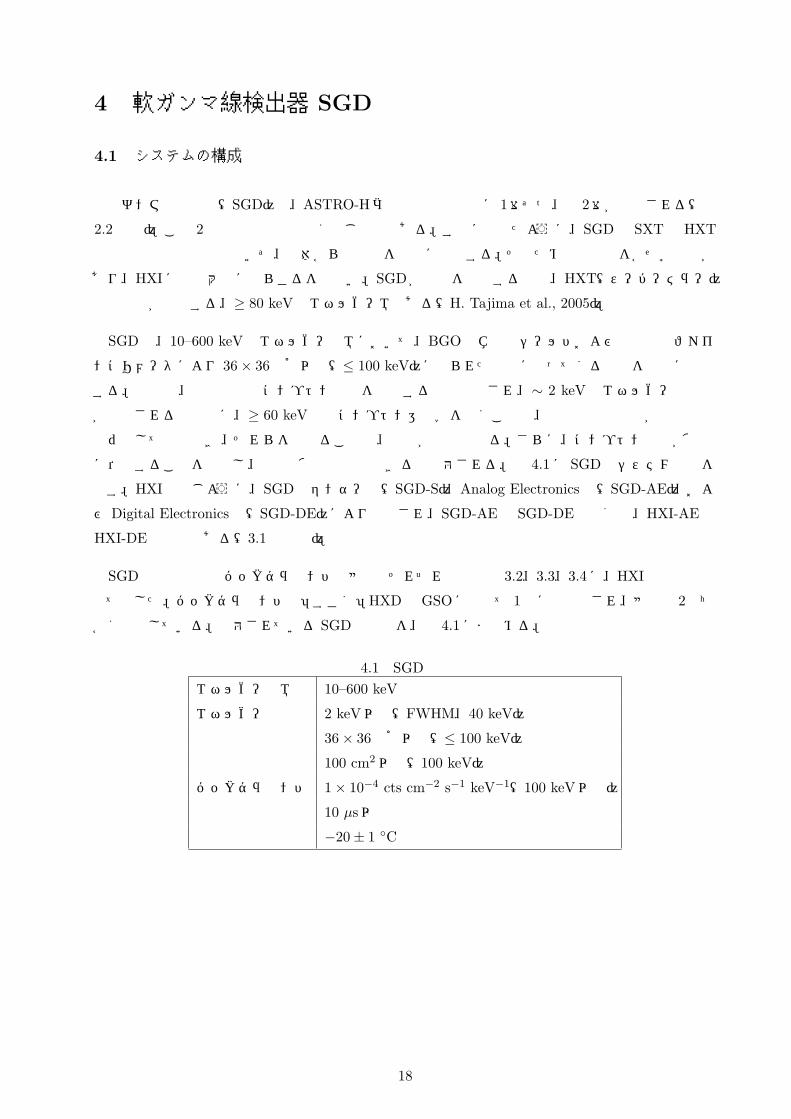
表 4.1 SGDの性能エネルギー領域 10–600 keV
エネルギー分解能 2 keV以下(FWHM、40 keV)
視野 36 × 36分角以下(≤ 100 keV)
有効面積 100 cm2以上(100 keV)
バックグラウンド 1 × 10−4 cts cm−2 s−1 keV−1(100 keV以上)
時間分解能 10 µs以下
作動温度 −20 ± 1 ◦C
18
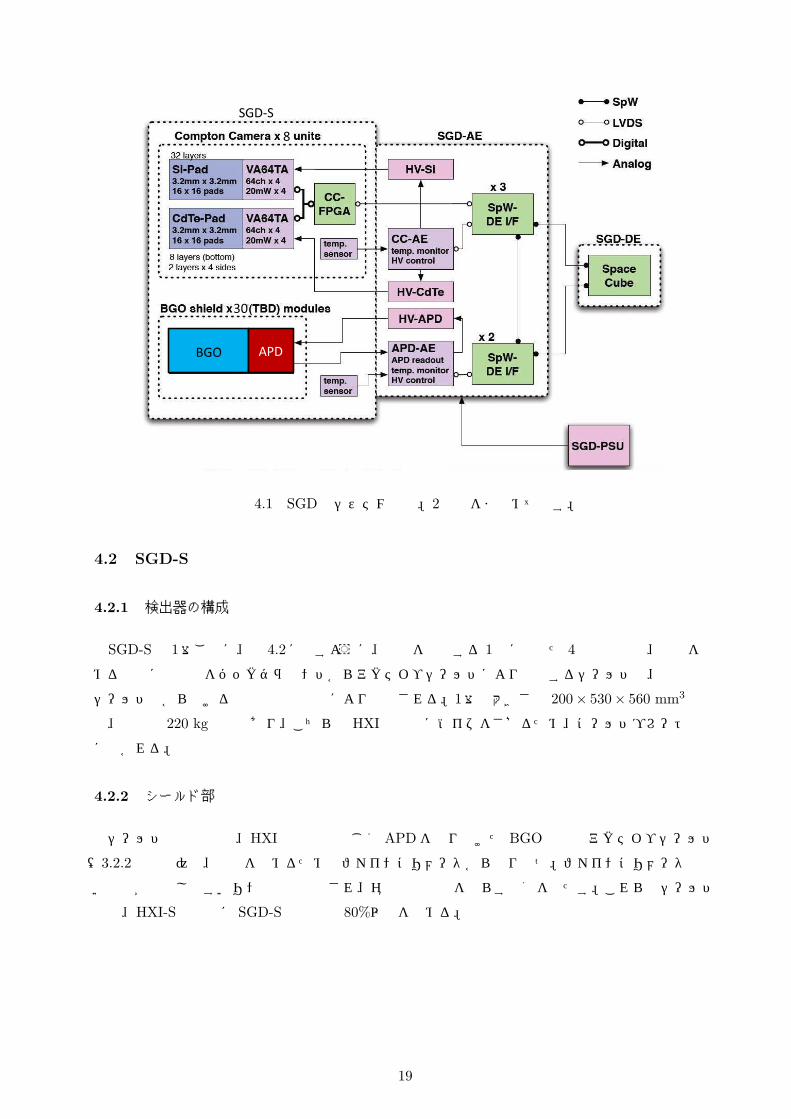
図 4.1 SGDのシステム構成。2系統をまとめて示す。
4.2 SGD-S
4.2.1 検出器の構成
SGD-Sは 1台ごとに、図 4.2に示すように、光子を検出する 1列に並べた 4組の検出部、視野を狭
めると共に検出器をバックグラウンドからアクティブシールドにより保護するシールド部、検出部や
シールド部から受ける前置回路部などにより構成される。1台の大きさは 200× 530× 560 mm3程度
で、重量は 220 kg程度であり、こちらもHXIと同様にノイズをさげるため、コールドプレートの上
に置かれる。
4.2.2 シールド部
シールド部の構造は、HXIのものと同じく APDを貼り付けた BGO結晶のアクティブシールド
(3.2.2節参照)と、視野を狭めるためのファインコリメータから成り立つ。ファインコリメータは薄
いものが加工しやすいリン青銅で製作され、宇宙背景放射を減らす役割を果たす。これらのシールド
部は、HXI-Sと同様に SGD-Sの重量の 80%以上を占める。
19
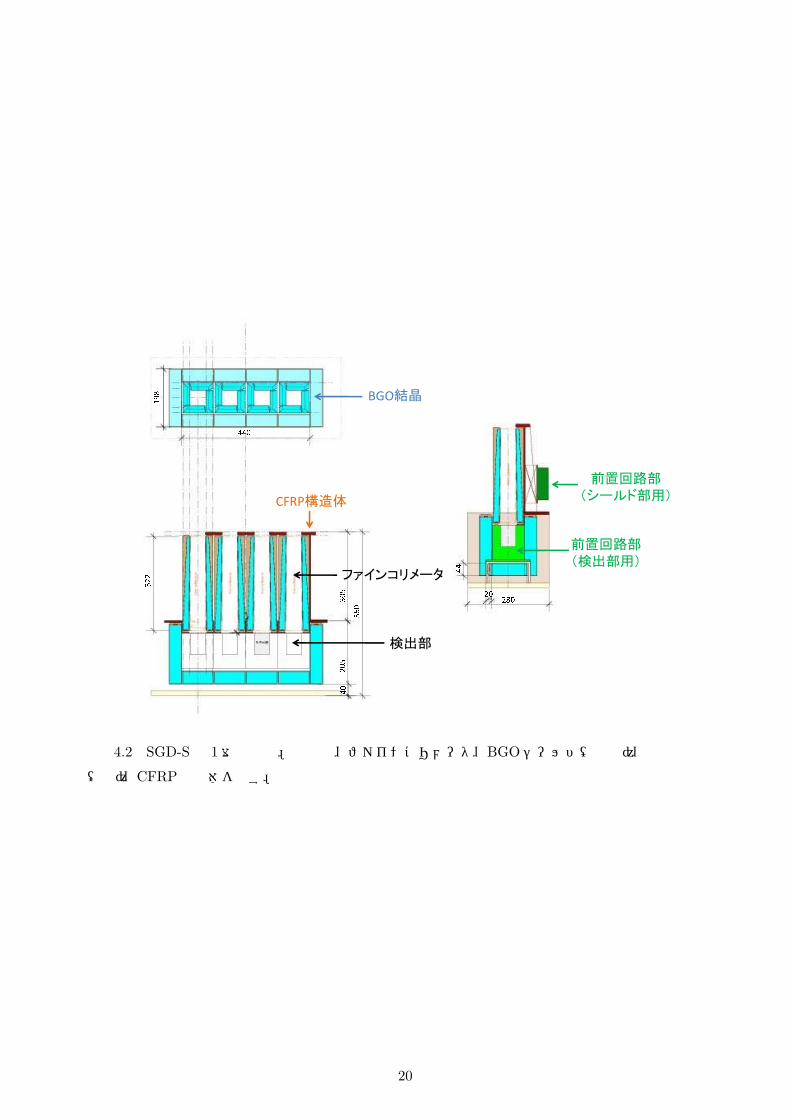
図 4.2 SGD-Sの 1台の構造。検出部、ファインコリメータ、BGOシールド(水色)、前置回路部
(緑)、CFRP構造体を示す。
20
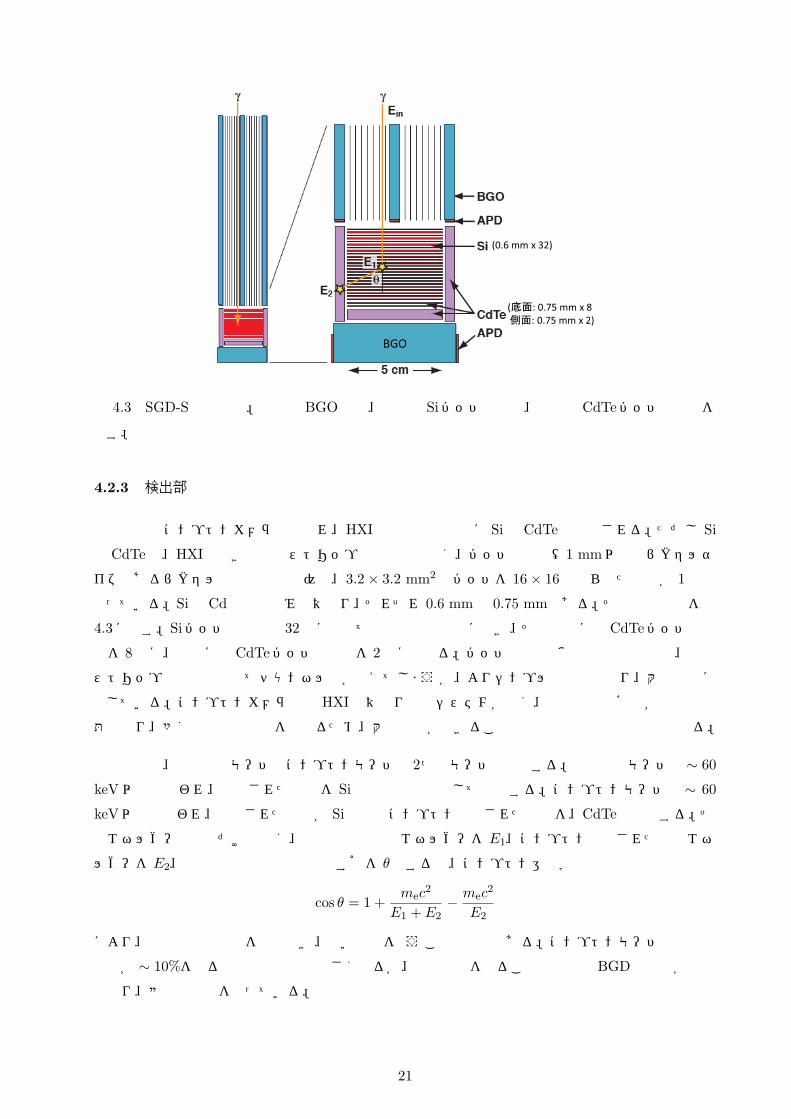
図 4.3 SGD-Sの検出部。水色はBGO結晶、赤色は Siパッド検出器、紫色はCdTeパッド検出器を
示す。
4.2.3 検出部
検出部はコンプトンカメラと呼ばれ、HXIの撮像部と同様に Siと CdTeで構成される。ただし Si
とCdTeは、HXIのときの両面ストリップ検出器ではなく、パッド検出器(1 mm以上のピクセルサ
イズであるピクセル検出器の総称)で、3.2 × 3.2 mm2のパッドを 16 × 16個ならべたものが 1層と
なっている。SiとCdの層の厚みは異なり、それぞれ 0.6 mmと 0.75 mmである。その構成方法を図
4.3に示す。Siパッド検出器は 32層に重ねて視線方向と垂直に置き、その底面にはCdTeパッド検出
器を 8層に、側面にはCdTeパッド検出器を 2層に重ねる。パッド検出器は片面検出器なので、両面
ストリップ検出器と比べてチャンネル数が増えてしまうが、よりシンプルな構造となり、大量生産に
適している。コンプトンカメラでは HXIと異なり集光システムが無く、有効面積の確保が最重要課
題となり、多くの検出器の層を重ねるため、大量生産ができることは製作の上で重要な要素となる。
検出部は、光電吸収モードとコンプトンモードの 2つのモードで動作する。光電吸収モードは∼ 60
keV以下で行われ、入射された光子を Siの層で光電吸収して検出する。コンプトンモードは ∼ 60
keV以上で行われ、入射された光子が Siの層でコンプトン散乱されたものを、CdTeで検出する。そ
のエネルギーの測定だけでなく、光子の入射時のエネルギーを E1、コンプトン散乱された後のエネ
ルギーをE2、入射方向と散乱方向のなす角を θとすると、コンプトン運動学の式
cos θ = 1 +mec
2
E1 + E2− mec
2
E2
により、光子の入射方向を推定でき、粗い撮像を行うことも可能である。コンプトンモードでは検出
効率が∼ 10%を切るので有効面積は小さくなるが、入射方向を知ることで信号とBGDの区別が可能
となり、感度の向上を図っている。
21
5 アクティブシールド設計の実験計画
5.1 BGO結晶を用いたアクティブシールド
HXIや SGDの検出する硬X線や軟ガンマ線の領域では、信号に対してバックグラウンドの影響が
大きくなり、その低減のためにアクティブシールドの存在は欠かせない。実際に「すざく」HXDで
用いられた Bi4Ge3O12(BGO)結晶によるアクティブシールドは、従来の衛星より 1桁低いバック
グラウンドを実現した(図 3.3参照)。
表 5.1に代表的な無機シンチレータの特性を示す。アクティブシールドのシンチレータとして、光
量が大きく(NaIの 85%)、APDの光感度(最大値∼ 580 nm)と相性の良い発光波長をもつCsI結
晶を用いることも考えられるが、以下に述べる 3つの理由により、HXIや SGDでも「すざく」HXD
と同じく BGO結晶を採用する。1つめは、宇宙での放射化の問題である。ヨウ素は高エネルギー陽
子によって放射化されると、131I、129Iなどの不安定核種を作り、これらが数十 keVのあたりに 1時
間程度の寿命で多くのガンマ線や特性 X線を放射する。衛星の軌道周期が約 1.5時間であることか
ら、これはバックグラウンドとしてひじょうに厄介な存在である。実際、過去のシンチレーション検
出器の多くはNaI結晶を用いていたため、そのヨウ素からのガンマ線が感度の大きな障害となってい
た。2つめは、ガンマ線の阻止能である。BGO結晶は有効原子番号(74)や密度(7.1 g/cm3)が他
の結晶よりも大きく、単位体積あたりの阻止能がCsIの約 2倍あるため小型化できる。これはサイズ
に制限の多い宇宙用検出器にとって重要な点となる。3つめは、蛍光透過率が高いことである。BGO
結晶は活性化物質を用いないため光収率は低いが(表 5.1)、蛍光は結晶の主成分であるBi+3イオン
の光学的遷移を伴っていて、Bi+3の光吸収スペクトルと放出スペクトルの間に大きなシフトがある。
そのため自己吸収が少なく、シンチレーション光に対して高い透明度を保つことができる。いっぽう
CsI結晶はBG0結晶の∼ 7倍もの光収率をもつが、自己吸収が生じやすいため、HXIや SGDのよう
に極端に深く長いシールドに用いると、発光場所による光量の違いが問題となってしまう。
このようにBGO結晶はアクティブシールドとして優れた特性をもつが、その機械的特性としては
表 5.2に示すように、鉄のように重く(密度 7.12 g/cm3)、ガラスよりも弱い(引っ張り強度 23.2
MPa)うえに、結晶構造であるため欠けやすいという性質ももっている。たとえ平均的な応力がBGO
結晶の破壊強度を下回っていても、結晶や構造にわずかな欠陥があれば応力の集中から破壊が起こる
ことも多く、いったんクラックが発生すると、それが時間とともに拡大することがる。そのため、こ
のもろい結晶が打ち上げに伴う振動で破壊されないための耐震構造を設計する必要があり、これこそ
が本論文の主題である。
実際の詳しい設計は第 6章に述べるが、この章では問題を解決する指針として、5.2節では打ち上
げに成功した「すざく」HXDでの対処法とその利害損失を復習し、5.3節ではそれを踏まえて HXI
や SGDで改良するべき点を、5.4節では改良案を実際に設計・検討する実験計画を述べる。
22
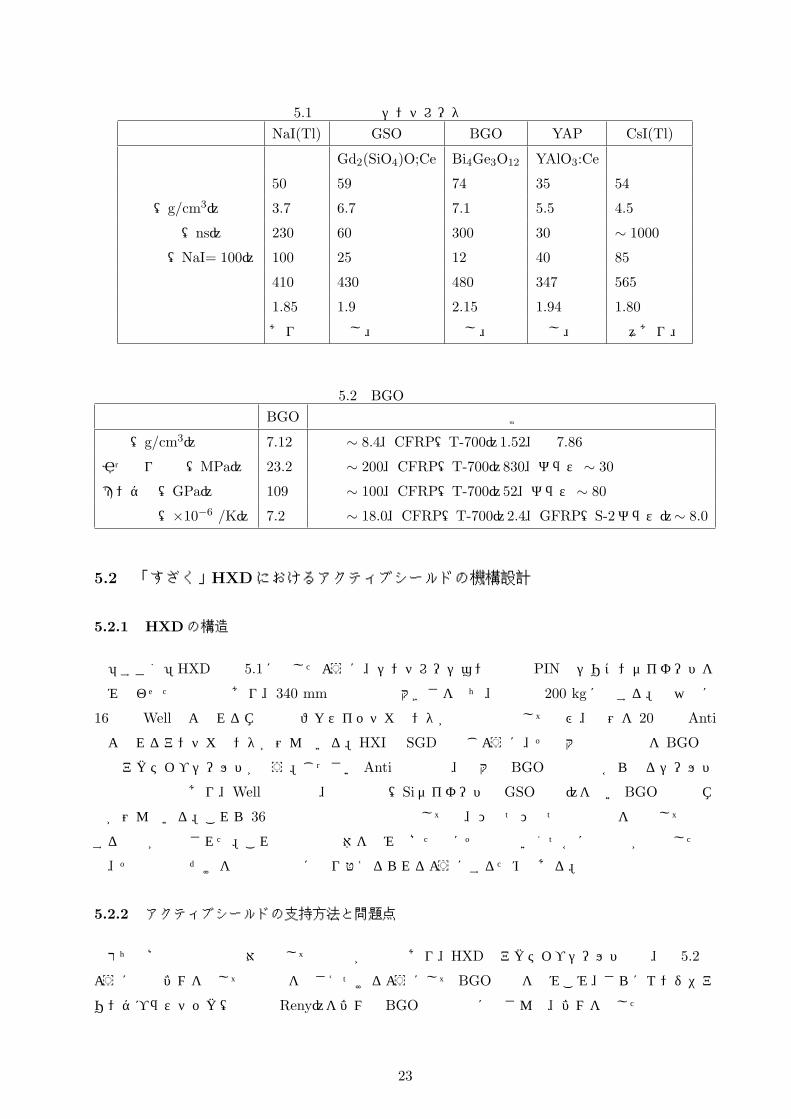
表 5.1 主な無機シンチレータ結晶の特性NaI(Tl) GSO BGO YAP CsI(Tl)
組成 Gd2(SiO4)O;Ce Bi4Ge3O12 YAlO3:Ce
実効原子番号 50 59 74 35 54
密度(g/cm3) 3.7 6.7 7.1 5.5 4.5
減衰時間(ns) 230 60 300 30 ∼ 1000
光収率(NaI= 100) 100 25 12 40 85
最高発光波長 410 430 480 347 565
屈折率 1.85 1.9 2.15 1.94 1.80
吸湿性 あり なし なし なし 少々あり
表 5.2 BGOの機械的特性特性 BGO 比較
密度(g/cm3) 7.12 真鍮∼ 8.4、CFRP(T-700)1.52、鉄 7.86
引っ張り強度(MPa) 23.2 真鍮∼ 200、CFRP(T-700)830、ガラス∼ 30
ヤング率(GPa) 109 真鍮∼ 100、CFRP(T-700)52、ガラス∼ 80
熱膨張率(×10−6 /K) 7.2 真鍮∼ 18.0、CFRP(T-700)2.4、GFRP(S-2ガラス)∼ 8.0
5.2 「すざく」HXDにおけるアクティブシールドの機構設計
5.2.1 HXDの構造
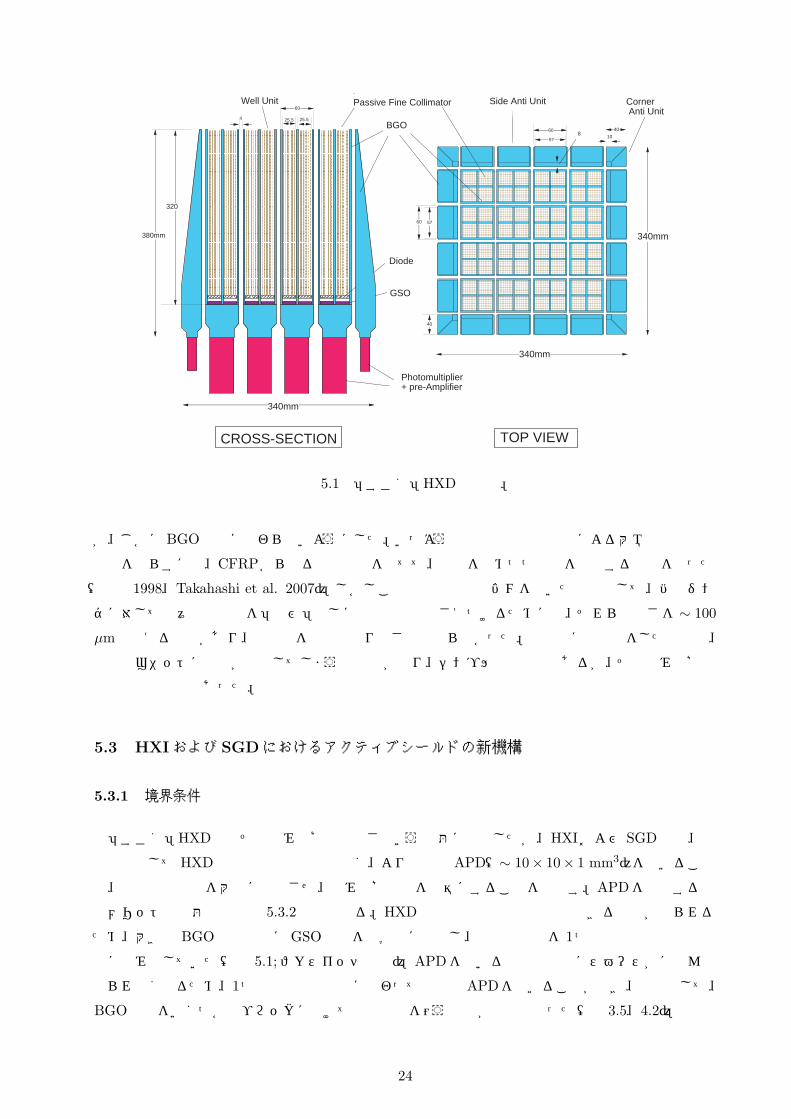
「すざく」HXDは図 5.1に示したように、シンチレーション結晶と PIN型シリコンダイオードを
組み合わせた検出器であり、340 mm立方程度の大きさをもち、重量は 200 kgに達する。中央部に
16本のWellとよばれる井戸型のフォスイッチカウンタが主検出器として並び、周囲を 20本のAnti
とよばれるアンチカウンタが囲んでいる。HXIや SGDと同じように、その大部分の構造を BGO結
晶のアクティブシールドが担う。じっさい Anti検出器は、巨大な BGO結晶の塊からなるシールド
専門の検出器であり、Well検出器も、主検出器(SiダイオードとGSO結晶)を深いBGO結晶の井
戸が囲んでいる。これら 36本の検出器の支持構造としては、ひとつひとつの検出器を独立して支持
する形式が採用された。これは検出器全体を組み上げた後にその中のいくつかに不具合が発生した場
合、その検出器だけを予備のものに取り替えるられるようにするためである。
5.2.2 アクティブシールドの支持方法と問題点
打ち上げ時の振動への対策としては防振が有効であり、HXDのアクティブシールドでは、図 5.2の
ように防振ゴムを介して端と端を押さえつけるようにしてBGO結晶を挟みこみ、さらにエンジニア
リングプラスチック(商標名 Reny)をゴムと BGO結晶の間にはさんで、ゴムを介した応力の集中
23
340mm
340mm
BGO
Diode
GSO
Photomultiplier + pre-Amplifier
TOP VIEWCROSS-SECTION
5710
860 40
60 57
Well Unit Side Anti Unit Corner Anti Unit
Passive Fine Collimator60
25.5 25.54
40
320
340mm380mm
図 5.1 「すざく」HXDの構造。
が、じかにBGO結晶に伝わらないようにした。いっぽう自分自身の共振などによる大域的な応力の
発生を減らすには、CFRPからなる補強構造を当てて、剛性を高めつつ応力を分散する方法を取った
(中澤 1998、Takahashi et al. 2007)。しかしこの方法では防振ゴムを用いた結果として、ハウジン
グに対して個々の検出器を「遊び」なしに適正な力で押さえつけるためには、それらの高さを∼ 100
µmで揃える必要があり、微調整を何度も繰り返さねばならなかった。最終的に微調整をした上でも、
少数のユニットに応力が集中してしまう危険性が残り、シンプルな構造ではあるが、その組み上げ作
業は困難なものであった。
5.3 HXIおよび SGDにおけるアクティブシールドの新機構
5.3.1 境界条件
「すざく」HXDではその組み上げの困難さという問題に直面したが、HXIおよび SGDでは、光
検出器としてHXDの光電子増倍管ではなく、より小型のAPD(∼ 10× 10× 1 mm3)を用いること
で、設計の自由度を大幅に上昇させ、組み上げ作業を容易にすることを目指す。APDを使用する際
のメリットや課題の詳細は 5.3.2節で述べる。HXDでは光電子増倍管の配置できる場所が限られる
ため、大きな BGO結晶の塊にGSO結晶を光学的に結合し、両者の蛍光を 1つの光電子増倍管で共
通に読み出していた(図 5.1;フォスイッチ方式)。APDを用いると光検出器にスペースがほとんど
取られなくなるため、1つの光電子増倍管に代わって複数のAPDを用いることができ、結果として、
BGO結晶をいくつかのブロックに分けて主検出部を囲う方法が可能となった(図 3.5、4.2)。
24
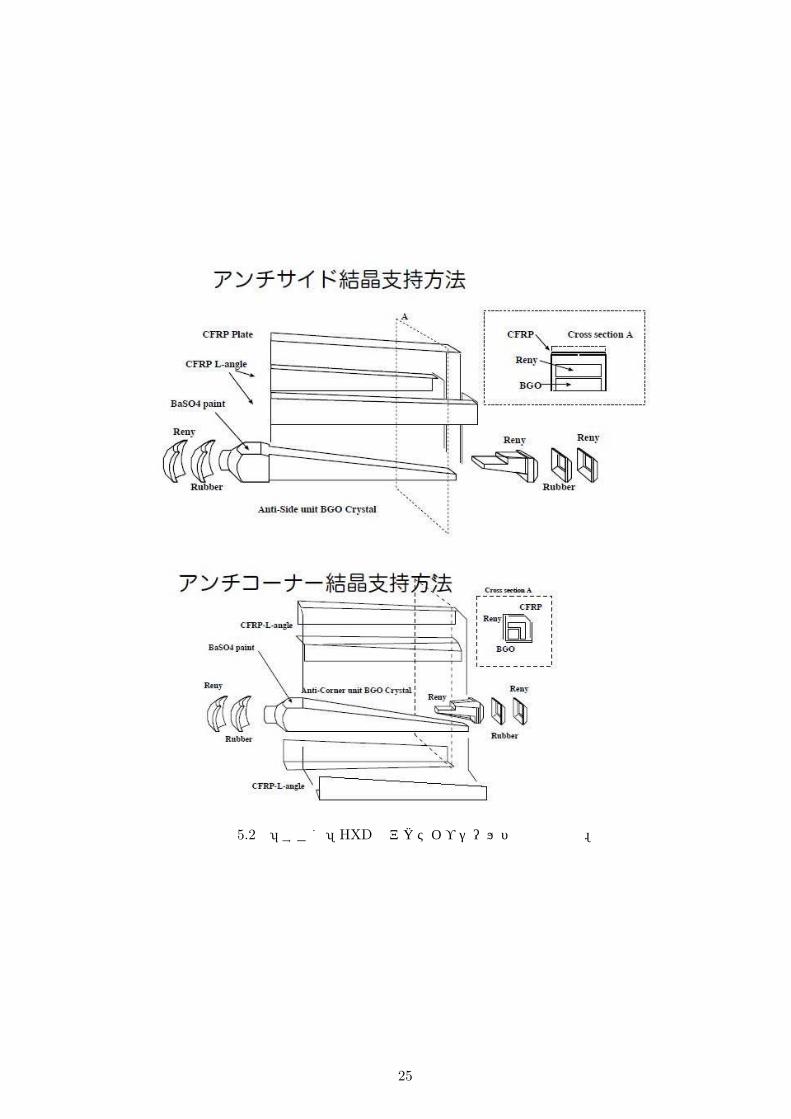
図 5.2 「すざく」HXDのアクティブシールドの支持方法。
25
分割ブロック方式の長所としては、
(1)主検出部を囲うシールド部の組み上げがしやすい。
(2)個々の結晶が小さくなるため、その共振周波数が上がる。
(3)応力集中や熱ひずみを逃しやすい。
(4)BGO結晶やその補強構造の形状がシンプルで製作しやすい。
などが挙げられる。(1)について、HXDと比べてHXIや SGDの主検出部はずっと複雑で出力のチャ
ンネル数が多いため、一体化された BGO結晶の作る深い井戸の中に組み込むには、HXDの場合を
さらに上回る困難を伴うと予想される。(2)について、低い共振周波数が出るのは横振動の場合であ
り、その周波数は「はり近似」により
fbeam =λ2
2πl2
√EI
ρA(5.1)
と求められる。l、E、I、ρ、Aはそれぞれ、はりの長さ、ヤング率、断面 2次モーメント、密度、断
面積である(藤田勝久:振動工学)。λは 1のオーダーの係数で、境界条件により値が変わり、基本波
の場合は、両端が固定端と自由端のときにもっとも小さい 1.88となり、両端がともに固定端のとき
もっとも大きい 4.73となる。図 3.5から、結晶を一体化したときに長さが 500 mm、断面積が 20× 80
mm3のはりができると仮定すると、その共振周波数は∼ 320 Hzとなる。これは両端が完全に固定さ
れている場合であるが、境界条件が違うと共振周波数はさらに低くなり、要求される下限である 200
Hz(2.2.2節参照)を下回る可能性もある。結晶を小さくすれば共振周波数は長さの 2乗に反比例し
て高くなるため、この問題は避けられる。(3)について、一体化した場合はその角に集中する応力集
中や、境界面にかかる熱応力を逃すことが容易ではない。(4)について、たとえば HXDのWell検
出器のBGOシールドは、平板 7枚から「田の字」のWellを接着して作り、それをBottom部に接着
し、防振用にプラスチックゴムを貼りつけ、反射材を塗布し、さらにCFRP補強材をつけるという、
複雑で時間のかかる行程を、すべて研究室内で行う必要があった。
いっぽう、この方式の短所としては、
(1)シールドに隙間が空く。
(2)質量が増える。
(3)結晶の読み出しチャンネルが増える。
などが挙げられる。(1)については、その隙間は 4 mm程度であれば主検出部への影響はあまり無
いと見積もられている。(2)については、分割に伴いさまざまな冗長さが生じるため、BGO結晶は
∼ 10%重くなるが、打ち上げロケットの性能向上もあり、総重量での問題は無い。(3)について、ア
クティブシールドの読み出しは、例えば図 3.5や図 4.2に示す案だと、HXIと SGDを総計して 78チャ
26
ンネルとなるが、「すざく」HXDの読み出しはシールドと信号を合わせて 100チャンネルであったの
で、不可能な数ではない。
アクティブシールドを個別のブロックで組み上げるとき、HXIと SGDでは、隣り合う BGO結晶
の隙間は 4 mm程度より広くすることは許されないので、検出器の底面のアクティブシールドは構造
的に両端を挟み込むことができない(図 3.5および図 4.2参照)。そこでBGO結晶の新しい支持方法
として、アクティブシールドを検出器のハウジングに「ねじ止め」して固定する方法を検討する。そ
の詳細は 5.3.3節で述べる。
5.3.2 APD使用による小型化
HXDでは光検出器に光電子増倍管を用いていたが、その大きさは∼ 100 mmとなり、ガラス管な
ので構造的にも振動や衝撃に弱い。そのため、HXIや SGDのアクティブシールドには、全体の大き
さ 14.5 × 13.7 × 1.8 mm3で、受光面の大きさが 10 × 10 mm2の APDを用いる。BGO結晶への取
り付けという面からみても、APDは接着するだけでよいので、光検出器自身の構造的な補強が必要
な光電子増倍管よりも、はるかに容易である。
光電子増倍管と比べたAPDの利点には、その小型化、軽量化だけではなく、低電圧化(光電子増
倍管 900 V、APD 400 V)も挙げられる。パッシェンの法則により、稀薄ガス中の放電は≤ 300 Vで
は生じないため、APDでは放電事故の危険性が大幅に下がる。また、光電子増倍管はブリーダ(電圧
分割)部に一定の電流を流す必要があるため、1本あたり 0.5–1 Wの電力を消費するのに対し、APD
の逆バイアス電流はほとんど無視できる。よって消費電力が小さくなることで、宇宙での限られた電
力の節約に役立つ。ただしAPDのゲインは温度により大きく変化し、低温ほどにゲインが高くなる
ため(-20◦C付近で-3%/K程度)、その温度は一定に保たれなければならない。HXIおよび SGDで
はAPDを含めたシールド部の全体は、-20 ◦C付近に調節される。
APDとBGO結晶のインターフェイス(貼りつけ面)については、APDが軽いため(数 g)、機械
的な問題はほとんど無い。しかし、その貼りつけ場所によってはBGO結晶から出るシンチレーショ
ン光の集光率が異なるため、ケーブル類の配置も考慮した上で、最適な場所を求めなければならな
い。第 6章で述べる基本設計で用いるBGO結晶は 66.6× 66.6× 40.0 mm3であり、ほぼ立方体なた
め、APDの貼りつけ位置による集光率の違いはほとんど無い。実際に Geant 4による BGO結晶の
集光率のシミュレーションでも、その差は数%であった。
5.3.3 ねじ止め機構によるモジュール化
HXIや SGDでは、「すざく」HXDでは一体化していた BGO結晶を分割するため、以前のように
両端を挟み込むのが難しい箇所も出てくる。そこでBGO結晶の新しい支持方法として、図 5.3に示
すように、BGO結晶を軽くて(密度 1.52 g/cm3)強い(引っ張り強度 830 MPa)CFRPの構造体で
囲い、その CFRPにヘリサートを入れてねじ穴を加工することで、アクティブシールドを検出器の
ハウジングに「ねじ止め」して位置決めをする方法を検討する。ねじ穴の精度は 100 µm以下に制御
27
できるため、要求される位置精度(∼ 100 µm)を簡単に満たすことができ、底面のアクティブシー
ルドの固定も可能である。なお、BGO結晶の表面にはシンチレーション光の集光率を減らさないた
めの反射材を挟み、その上から接着剤を用いて CFRP構造体に貼りつける。
CFRPは、強化材である炭素繊維の束に、母材であるエポキシやポリイミドなどの樹脂を含浸させ
た複合材料である。1枚のシート(プリプレグ:炭素繊維を織りこんだ樹脂を半硬化した部材)はきわ
めて異方性が大きいので、用途に合わせ、それらをさまざまな方向に好みの枚数だけ積層し、高温下
で樹脂を重合させて固める。密度は 1.5–1.7 g/cm3(鋼 7.9 g/cm3、BGO結晶 7.1 g/cm3)、ヤング
率は 40–400 GPa(鋼 206 GPa、BGO結晶 109 GPa)、強度は 300–1200 MPa(鋼 600 MPa、BGO
結晶 23 MPa)となる。軽くて強いため、スポーツ用品や自動車、航空機、人工衛星などに広く使わ
れている。アウトガスが少なく(5.4.3節参照)X線透過性もあるため、アクティブシールドの構造
体としてはもっとも有望な材質である。ただし、強度の高いものはオートクレーブ成形法で作られる
ため、あまり形状の複雑なものはできない。オートクレーブ成形法とは、金属の型にプリプレグを積
層してシートで覆い、オートクレーブ内で内包された空気や揮発物を真空除去し、加熱、加圧して硬
化させる成形法である。今回は、航空機のボーイングなどにも使われており手に入りやすい、T-700
(特性は表 5.2)とよばれる汎用の CFRPを用いて設計を行う。振動は 3軸ともにかかるので、1方
向の炭素繊維をもつプリプレグを 0度、±45度、90度に並べた疑似等方とした。
BGO結晶をCFRP構造体で囲う際に、シンチレーション光を読み出す光検出器も構造体の中に入
れてしまうことができれば、アクティブシールドは CFRPの箱からケーブル数本が出ているだけの
独立した1つのモジュールとなる。組み上げ作業はその箱をねじで止めるだけであり、取り付けや交
換の手間などが大幅に省ける。本論文では行わないが、これを発展させて中にAPD用のプリアンプ
やアナログ回路、高圧電源まで入れてしまえば取り付けるだけで独立したガンマ線検出器となり、た
とえば小型衛星にでも簡単に搭載できるので、宇宙 X線やガンマ線観測の敷居を低くすることもで
きる。
この機構では取扱いが簡単になる反面、防振ゴムを挟まないので応力が集中しやすく、また高周
波の振動や衝撃が減衰せずに伝わる危険性がある。とくに強度的に考慮すべき部分は、BGO結晶と
CFRP構造体の接するインターフェイスと、CFRPとねじの接するインターフェイス(ねじ穴)であ
る。BGO結晶とCFRP構造体の接するインターフェイスは異なる物質を接着する部分なので、連続
体部分よりも強度が低いと思われる。CFRPとねじの接するインターフェイスは衛星からの応力を伝
える源であり、ねじ穴の面積も小さいため応力も大きくなる。機械的環境に対してそれらのインター
フェイスが応力集中に耐えるよう設計をするとともに、それを振動試験などで実証する必要がある。
5.4 実験計画
5.3節で出された、APDを光検出器として用いたねじ止めのできるアクティブシールドというア
イディアを実現するためには、それらの機構が打ち上げ時の環境に耐えられることを実証をしなけれ
ばならない。その中でも「すざく」HXDと設計を変えたことでとくに懸念される点は、5.3節で述
28
図 5.3 ねじ止めができるアクティブシールドのモジュールの概念図。
べた通りである。以下、新機構設計の指針として、5.4.1項ではシールドにかかる振動レベルを述べ、
5.4.2項では CFRPとねじのインターフェイスの課題、5.4.3項では BGO結晶と CFRP構造体のイ
ンターフェイスの課題、5.4.4項にボトムシールド全体の課題を開発する実験計画を述べる。
5.4.1 振動レベル
各機器に対する機械環境の試験レベルは、H-IIAロケットにASTRO-Hと同じような重量の衛星を
乗せたときの典型的なレベルをもとに算出され、2008年 9月づけの「ASTRO-H搭載機器の耐環境
性設計基準書」にまとめられている。衛星の底面をXY面、望遠鏡に沿った軸を Z軸とし、2.2.2項で
述べた機械環境試験の項目と対応させると、(1)の準静加速度は、3軸ともに 20 Gである。(2)と
(3)を含めたランダム振動を、図 5.4に示す。XY軸が 10.4 Grms、Z軸が 17.0 Grmsである。音響
試験は、衛星内部の機器に関してはランダム振動の 800 Hz以上の帯域として模擬されるため、コン
ポーネントレベルでは行われず、衛星の外壁に取り付けられる SGD-Sではサブシステムレベルで実
施される。(4)の落下衝撃は、5–100 Hzでの 20 Gの正弦波試験により模擬する。この試験には、衛
星や検出器全体の共振への耐性を確認する目的もある。(5)のパイロ衝撃としては、衛星分離面での
ロケット側からの衝撃入力レベルが最大 4100 Gsrsであり、搭載機器に達するときには減衰して最大
1000 Gsrsとなることが前提となっている。shock response spectrum(srs)とは、入力ショックレベ
ルに対する応答で、周波数ごとに最大限かかる加速度を示したものである。入力レベルの定義は容易
ではないため、その応答によりレベルを定義する。規定のパイロ衝撃レベルを図 5.5に示す。
5.4.2 CFRP構造体とねじのインターフェイスの課題
CFRPとねじの接するインターフェイス(ねじ穴)は、振動を伝える入口となり、ねじ穴の面積も
小さいため、CFRP構造体の中ではもっとも応力が集中しやすい。シールドには∼ 17 Grmsのラン
ダム振動がかかるが、瞬間的にはその加速度は 4倍程度となることもあり得る。第 6章では、その応
力に耐えるための CFRPの最低限の厚みなどを計算し、構造体の設計を行う。とくにねじの受け構
29
0.001
0.01
0.1
100 1000
PS
D (
G2/
Hz)
Frequency (Hz)
plane_xyplane_z
図 5.4 アクティブシールドのランダム振動試験に用いる、コンポーネント試験レベル(0 dB)。緑
はX軸およびY軸方向、赤は Z軸方向の加振を示す。横軸は周波数、縦軸は周波数あたりの振動パ
ワー。XY軸は 10.4 Grms、Z軸は 17.0 Grms。
1
10
100
1000
100 200 500 1000 2000 4000
Sho
ck L
evel
(G
srs)
Frequency (Hz)
plane_xyz
図 5.5 アクティブシールドのパイロ衝撃試験に用いる、コンポーネント試験レベル(0 dB)。横軸
は周波数、縦軸は衝撃に対する最大応答加速度。
30
造(めねじ)を CFRPに固定する方法は、慎重に設計しなければならない。
5.4.3 BGO結晶とCFRP構造体のインターフェイスの課題
BGO結晶と CFRP構造体の接するインターフェイスには、BGO結晶のシンチレーション光の集
光率を減らさないための反射材を挟んだり、接着剤を塗付しなければならない。BGO結晶のみなら
ず、それらの強度も問題となる。また宇宙の真空中では、有機材料の接着剤などの揮発性の物質は蒸
発して他の観測機器に付着する、アウトガスの問題がある。衛星搭載構造に用いるすべての材料は、
規定のアウトガス試験(7× 10−3 Pa以下、125 ◦Cで 24時間)でTotal Mass Loss(TML)が 1%以
下でなければならない。インターフェイスにかかる応力の計算や、集光率やアウトガスの条件を考慮
した反射材や接着剤の選定、強度試験については、6.2節で述べる。
BGO結晶の熱膨張率は α = 7.2 × 10−6 K−1であるのに対し、CFRPの値は α = 2.8 × 10−6 K−1
と、ひじょうに小さい。それらを接着する際は、温度変化による熱応力が問題となる。∆α、∆T をそ
れぞれ、両者の熱膨張率の差、温度変化の値とすると、熱応力はE∆α∆T で表される。BGO結晶の
ヤング率と、BGO結晶とCFRPの熱膨張率の差、軌道上での温度変化(-30 ◦Cから 60 ◦Cであると
されている)を代入すると、その値は∼ 48 MPaとなり、BGO結晶の強度である 23.2 MPa(表 5.2)
を上回ってしまう。じっさい「すざく」HXDの開発では、350 mmの長さをもつAnti検出器が、熱
サイクル試験でたびたび破損するトラブルが発生し、大きな問題となった。その対策としてはヤング
率の低い弾性接着剤を用いて応力を逃すのが一般的だが、弾性接着剤はアウトガスが ∼ 5%と高く、
宇宙使用には適さない。そこでHXIと SGDでは、CFRPに熱膨張率の高いGlass Fiber Reinforced
Plastics(GFRP)を混ぜ、熱膨張率を α = 8 × 10−6 K−1と、BGO結晶の値に近づけるというアイ
ディアがあり、それについては 8.1節で述べる。
5.4.4 シールド全体の課題
シールド全体としては、検出器全体や衛星との共振のカップリングを避けるため、∼ 200 Hzを越
える共振周波数を持たなければならない。そのため HXIのボトムシールドを例にとり、共振周波数
の理論計算を 6.3.3項で行う。その上で 6.4節で、CFRPメーカーと相談をしつつ、作りやすさの観
点から設計案を絞りこむ。その案について、有限要素法で詳細な応力計算を行い、理論上は強度に問
題が無いことを 6.5節で確認する。採択された設計案に基づき、CFRPの補強構造を実際に試作し、
実物の BGO結晶と結合してボトムシールドを組み上げるとともに、BGOの替わりに機械的特性の
似た真鍮(表 5.2)を用いて、機械的ダミー品も製作する。最後に、この設計の正しさを実証するた
め、試作したアクティブシールドおよびそのダミーに対して、図 5.4のコンポーネントレベルで振動
試験を実施する。これは一連の機械環境試験(2.2.2項)の中で、この試験が一般的にもっとも苛酷
と考えられるからである。
31
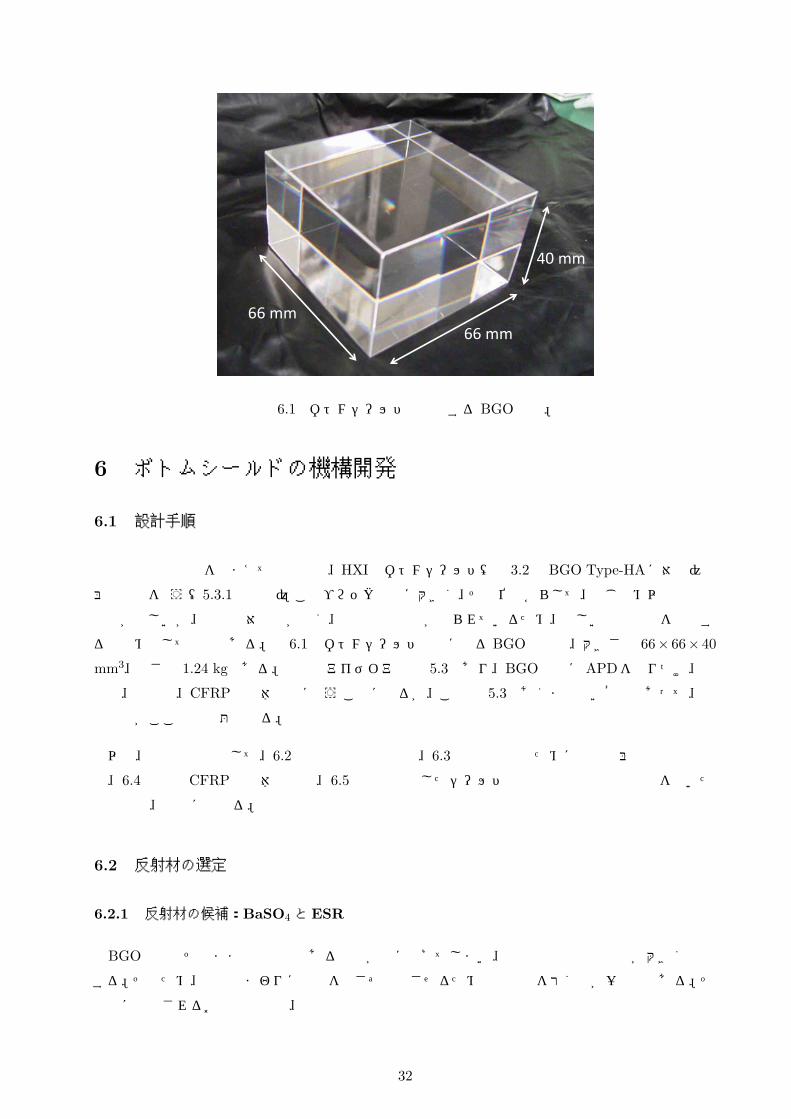
図 6.1 ボトムシールドで保護する BGO結晶。
6 ボトムシールドの機構開発
6.1 設計手順
前章の実験計画を踏まえて本章では、HXIのボトムシールド(図 3.2のBGO Type-HAに対応)の
耐震設計を行う(5.3.1節参照)。このブロックは特に大きく、その位置からして、ねじ止め以外の保持
方法が難しいが、反面で対称性が良く、設計の自由度が限られているため、新しい保持機構を開発す
る手始めとして最適である。図 6.1はボトムシールドの中に入るBGO結晶で、大きさは 66× 66× 40
mm3、重さは 1.24 kgである。基本のアイディアは図 5.3であり、BGO結晶にAPDを貼りつけ、反
射材、接着剤、CFRP構造体の順に覆うことになるが、この図 5.3はあくまで粗い概念であって、詳
細設計がここでの課題となる。
以下、設計の手順として、6.2節では反射材の選定、6.3節では設計のために必要な耐振性の予備計
算、6.4節では CFRP構造体の設計、6.5節では設計したシールドの応力集中の有限要素法を用いた
数値計算、の順に述べる。
6.2 反射材の選定
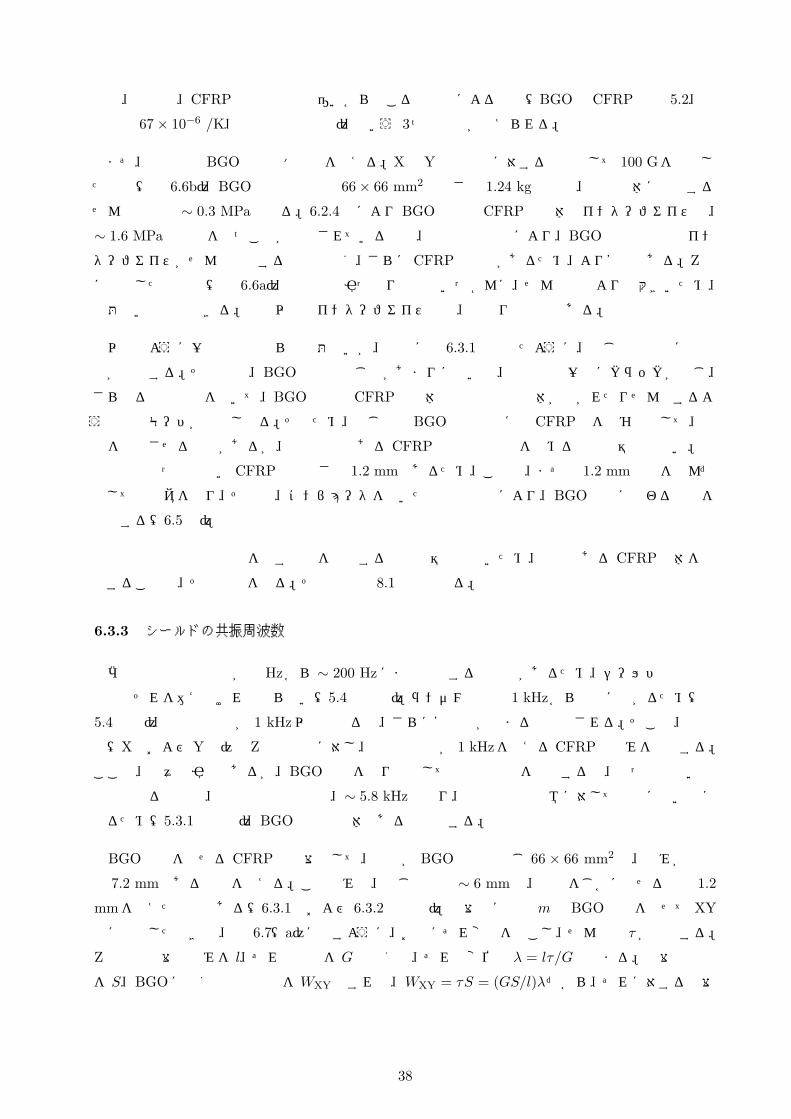
6.2.1 反射材の候補:BaSO4とESR
BGO結晶はそのままでは信号である蛍光が外に逃げてしまい、光検出器の集光効率が大きく低下
する。そのため、結晶のまわりに蛍光を逃さず反射させるための反射材を巻くのが一般的である。そ
の際に要求されるおもな条件は、
32
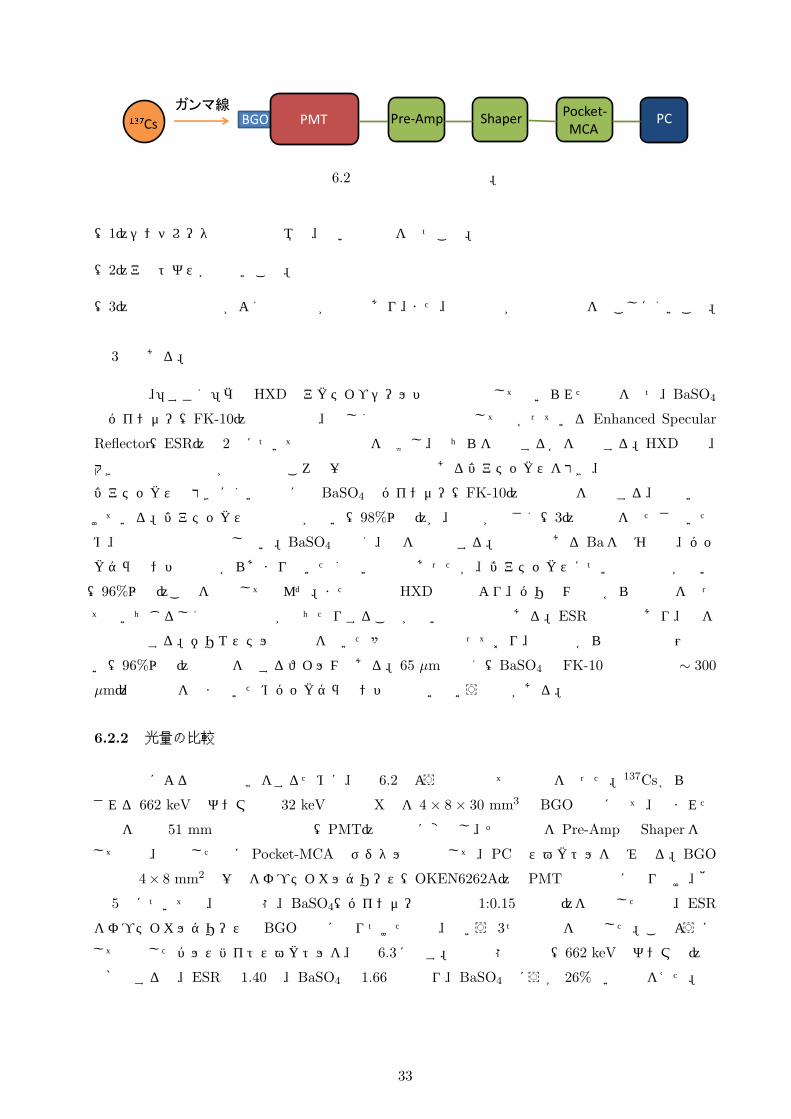
図 6.2 光量測定の実験装置。
(1)シンチレータの発光波長域で、高い反射率をもつこと。
(2)アウトガスが少ないこと。
(3)接着剤との相性がよく接着強度が十分であり、また、自分自身が破断や剥離を起こしにくいこと。
の 3点である。
今回は、「すざく」衛星HXDのアクティブシールドで反射材として用いられた実績をもつ、BaSO4
とバインダー(FK-10)の混合剤と、新しく反射材の候補として挙がっている Enhanced Specular
Reflector(ESR)の 2点について上記の条件を比較し、どちらを採用するかを検討する。HXDでは、
大きな平面など形状が単純なところは一般的な反射材であるゴアテックスを巻き、斜面や接着面など
ゴアテックスで巻きにくい部分には BaSO4とバインダー(FK-10)の混合剤を塗布する、と使い分
けている。ゴアテックスは反射率が良い(98%以上)が、強度が小さく(3)の条件を満たさないた
め、今の設計では採用しない。BaSO4は白く、光を乱反射する。重元素であるBaを含むので、バッ
クグラウンドの観点からあまり用いたくないものであったが、ゴアテックスについで反射率が良い
(96%以上)ことを考慮して選んだ。また前回の HXDの経験より、バリウムの上から接着剤を塗っ
てもいちじるしく強度や反射が落ちたりすることがないのも利点である。ESRは銀色であり、光を
鏡面反射する。ポリエステル系樹脂を用いた多層膜構造となっており、可視光から紫外線の範囲で高
い(96%以上)反射率を有するフィルムである。65 µmと薄く(BaSO4と FK-10の混合剤は∼ 300
µm)、重金属を含まないためバックグラウンドも少ないという利点がある。
6.2.2 光量の比較
反射材による光量の比較をするために、図 6.2のような道具立てで実験を行った。137Csから放出
される 662 keVのガンマ線と 32 keVの特性 X線を 4 × 8 × 30 mm3の BGO結晶に当て、生まれた
光子を直径 51 mmの光電子増倍管(PMT)で電子に変換し、その信号を Pre-Ampと Shaperを通
して増幅、整形した後に Pocket-MCAでデジタル信号化して、PCでスペクトルを読み取る。BGO
結晶は 4× 8 mm2の一面をオプティカルグリース(OKEN6262A)でPMTの光電面に取り付け、他
の 5面については、裸の状態、BaSO4(バインダーと重量比 1:0.15で混合)を塗布した場合、ESR
をオプティカルグリースでBGO結晶に貼りつけた場合、という 3つの場合を試験した。このように
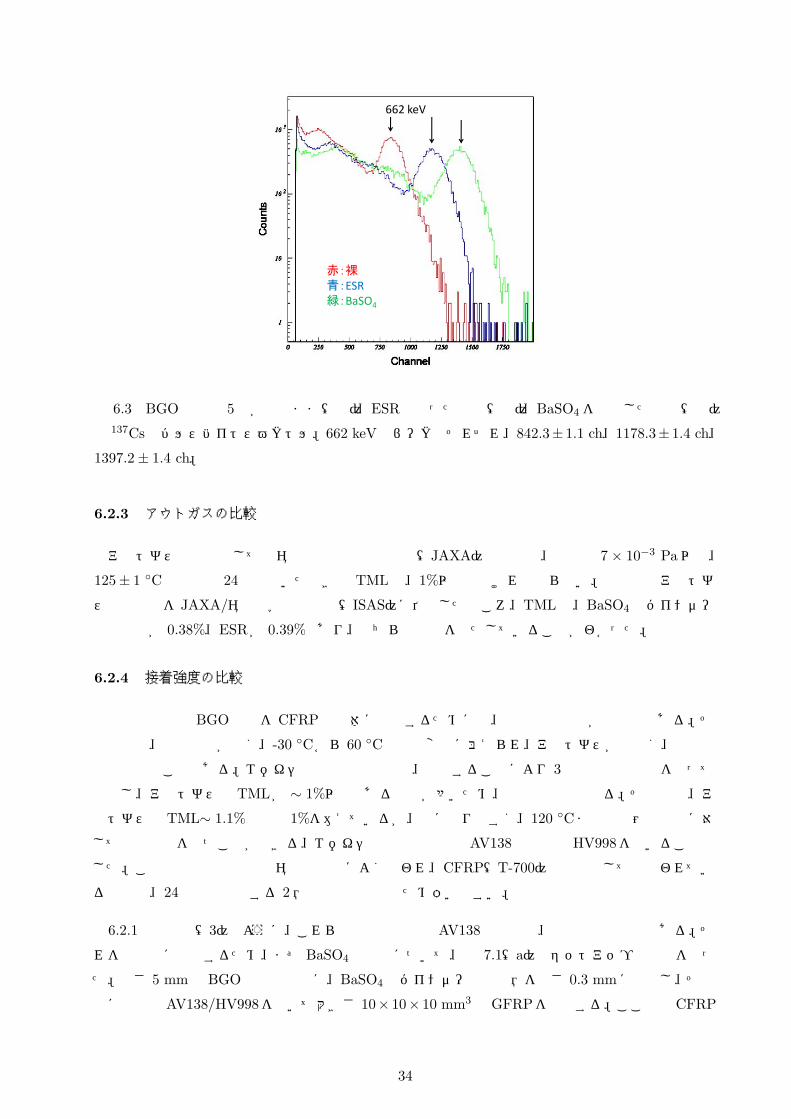
して取得したパルスハイトスペクトルを、図 6.3に示す。裸の状態の光量(662 keVのガンマ線)で
規格化すると、ESRは 1.40倍、BaSO4は 1.66倍となり、BaSO4のほうが 26%良い結果をえた。
33
662 keV
ESR
BaSO4
図 6.3 BGO結晶の 5面が裸のまま(赤)、ESRで覆った場合(青)、BaSO4を塗布した場合(緑)
の 137Csのパルスハイトスペクトル。662 keVのピークはそれぞれ、842.3± 1.1 ch、1178.3± 1.4 ch、
1397.2 ± 1.4 ch。
6.2.3 アウトガスの比較
アウトガスの条件としては宇宙航空研究開発機構(JAXA)の基準で、真空度 7 × 10−3 Pa以下、
125± 1 ◦Cの環境で 24時間置いたときのTMLは、1%以下でなければならない。反射材のアウトガ
ス測定実験を JAXA/宇宙科学研究本部(ISAS)に依頼したところ、TMLは、BaSO4とバインダー
の混合剤が 0.38%、ESRが 0.39%であり、どちらも基準を満たしていることがわかった。
6.2.4 接着強度の比較
今回の設計で BGO結晶を CFRP構造体に固定するためには、接着剤の使用が不可欠である。そ
の条件は、接着強度が高く、-30 ◦Cから 60 ◦Cの温度変化に耐えられ、アウトガスが少なく、常温で
接着可能なことである。エポキシ樹脂系の接着剤は、加熱することにより 3次元の網目構造をとって
硬化し、アウトガスも TMLが∼ 1%以下であるものが多いため、有力な候補となる。その中で、ア
ウトガスはTML∼ 1.1%とやや 1%を越えているが、手に入りやすく、120 ◦Cまで広範囲の部材に対
して接着強度を保つことができる、エポキシ樹脂系接着剤のAV138と硬化材HV998を用いることと
した。この接着剤は航空機や宇宙機器用によく使われ、CFRP(T-700)の母材としても使われてい
るもので、24時間で硬化する 2液常温硬化樹脂のため扱いやすい。
6.2.1項の項目(3)のように、これら反射材と接着剤AV138の相性は、重要な調査項目である。そ
れを実験的に測定するため、まずBaSO4の場合について、図 7.1(a)のセットアップで実験を行っ
た。厚さ 5 mmのBGO結晶板の上に、BaSO4とバインダーの混合液を厚さ 0.3 mmに塗布し、その
上に接着剤AV138/HV998を用いて大きさ 10× 10× 10 mm3のGFRPを接着する。ここではCFRP
34
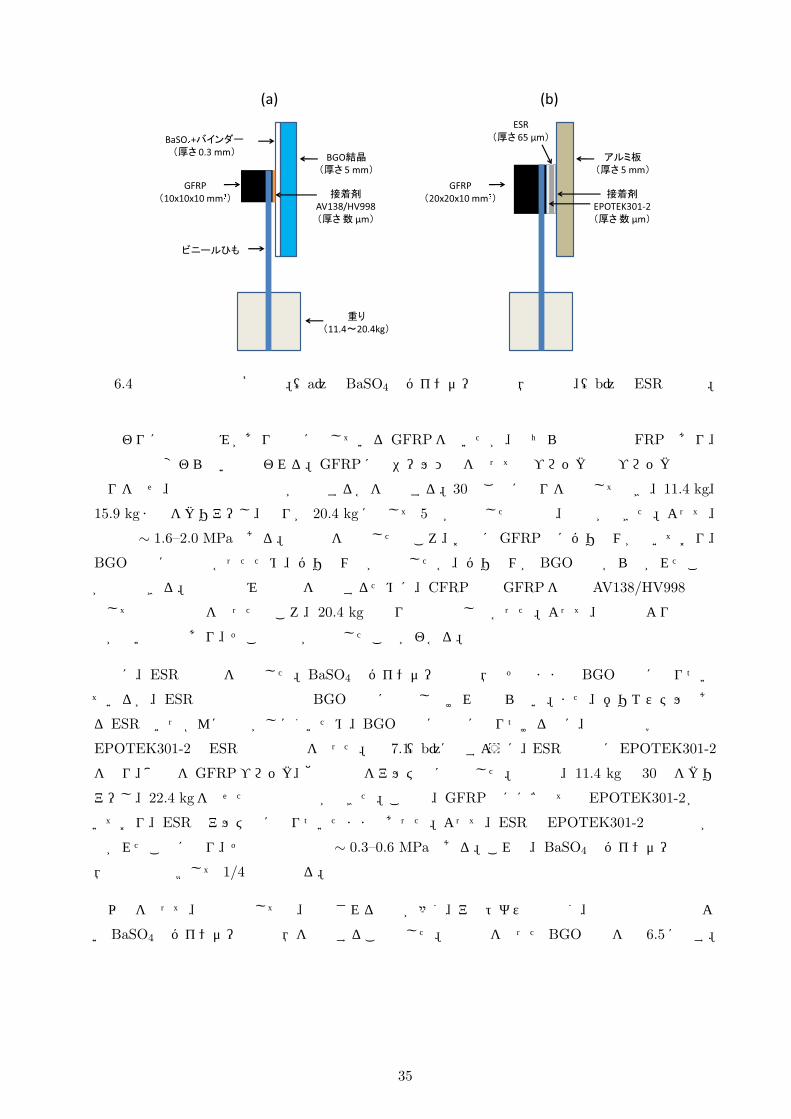
図 6.4 接着強度試験の概略図。(a)は BaSO4とバインダーの混合液の場合、(b)は ESRの場合。
の代わりに素材の厚みがあり実験に適しているGFRPを用いたが、どちらも主成分は FRPであり、
接着強度は変わらないと思われる。GFRPにビニールひもを使って鉛ブロックや銅ブロックなどの
錘りを乗せ、どの時点で接着面が破断するかを試験する。30秒ごとに錘りを増やして行き、11.4 kg、
15.9 kgまでをクリアーし、錘りが 20.4 kgに達して 5秒が経過した時点で、破断が起きた。よって、
強度は∼ 1.6–2.0 MPaである。破断面を検査したところ、おもにGFRP側にバリウムが付いており、
BGO結晶に傷は無かったため、バリウム層が破断したか、バリウムが BGO結晶から剥がれたこと
が推測できる。接着剤のみの強度を測定するために、CFRP板とGFRPを直接AV138/HV998で接
着して同様の試験を行ったところ、20.4 kgの重りでも破断しなかった。よって、接着剤よりも反射
材が弱い部分であり、そこで破断が発生したことがわかる。
次に、ESRの場合を実験した。BaSO4とバインダーの混合液はそのままで BGO結晶に貼りつい
ているが、ESRは透明な接着剤で BGO結晶に接着しなければならない。また、ポリエステルであ
るESRはいっぱんに接着がしにくいため、BGO結晶に実際に貼りつける前に、透明な光学用接着剤
EPOTEK301-2とESRの接着相性を測った。図 7.1(b)に示すように、ESRの両面にEPOTEK301-2
を塗り、片面を GFRPブロック、他方の面をアルミ板に接着した。結果は、11.4 kgの 30秒をクリ
アーし、22.4 kgを乗せた時点で破断が起きた。この際、GFRP側にほぼ全てのEPOTEK301-2が付
いており、ESRはアルミ板に貼りついたままであった。よって、ESRと EPOTEK301-2との接着が
剥がれたことになり、その接着強度は∼ 0.3–0.6 MPaである。これは、BaSO4とバインダーの混合
液の強度と比較して 1/4程度となる。
以上をもって、反射材としては、集光される光量が多く、アウトガスも少なく、接着剤との相性もよ
いBaSO4とバインダーの混合液を採用することとした。反射材を塗ったBGO結晶を図 6.5に示す。
35
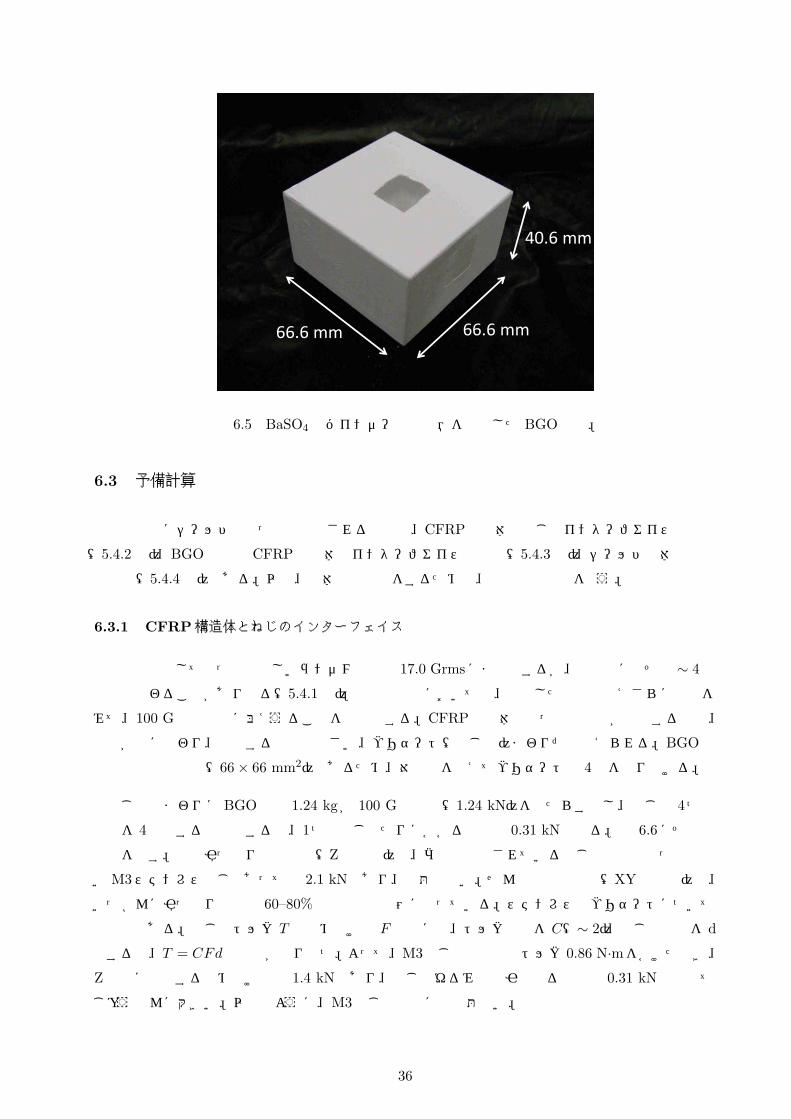
図 6.5 BaSO4とバインダーの混合液を塗布した BGO結晶。
6.3 予備計算
振動の際にシールドでもっとも懸念される部分は、CFRP構造体とねじのインターフェイスの強度
(5.4.2項)、BGO結晶と CFRP構造体のインターフェイスの強度(5.4.3項)、シールド全体の共振
周波数(5.4.4項)である。以下、具体的な設計をするための、基本的な計算を行う。
6.3.1 CFRP構造体とねじのインターフェイス
機械環境としてもっとも厳しいランダム振動は 17.0 Grmsにまで達するが、瞬間的にはその∼ 4倍
程度も加わることがあり得る(5.4.1項)。今回の設計においては、共振した場合も考えさらに余裕を
みて、100 Gの静荷重に耐えうることを目標とする。CFRP構造体でもっとも応力が集中するのは、
応力が直に伝わり、分散する面積の小さい、ヘリサート(ねじ穴)まわりだと考えられる。BGO結
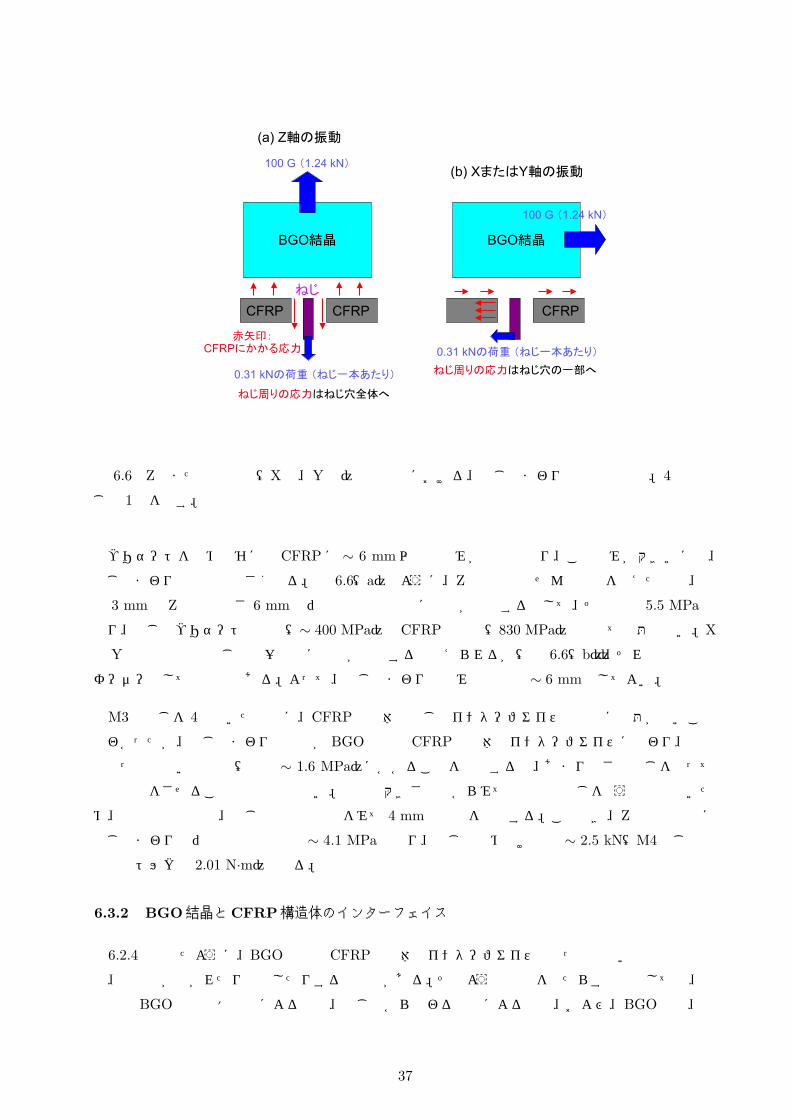
晶の底面は正方形(66 × 66 mm2)であるため、対称性を考えてヘリサートは 4本を取り付ける。
ねじ穴のまわりに BGO結晶 1.24 kgが 100 Gの荷重(1.24 kN)をもたらすとし、ねじ穴 4つで
荷重を 4等分すると仮定すると、1つのねじ当たりにかかる荷重は 0.31 kNとなる。図 6.6にその模
式図を示す。最小引っ張り破断荷重(Z軸方向)は、衛星で規定されているねじの種類でもっとも細
いM3ステンレスねじであっても 2.1 kNであり、問題はない。せん断荷重の強度(XY軸方向)も、
いっぱんに引っ張り強度の 60–80%なので許容範囲に入っている。ステンレスのヘリサートについて
も同様である。ねじのトルク T と締め付け力 F の間には、トルク係数を C(∼ 2)、ねじの直径を d
とすると、T = CFdの関係が成り立つ。よって、M3ねじの標準締結トルク 0.86 N·mをかけたとき、Z方向に発生する締め付け力は 1.4 kNであり、ねじのゆるみの原因となる外力の 0.31 kNと比べて
じゅうぶんに大きい。以上のように、M3ねじの強度には問題ない。
36
BGO
100 G 1.24 kN
0.31 kN
(a) Z
CFRP CFRP
CFRP
BGO
100 G 1.24 kN
0.31 kN
(b) X Y
CFRP
図 6.6 Z軸または横方向(X軸、Y軸)の振動時における、ねじ穴まわりの応力の分布。4本のね
じの 1本を示す。
ヘリサートを埋め込むには CFRPに ∼ 6 mm以上の厚みが必要となり、この厚みが大きいほど、
ねじ穴まわりの応力は小さくなる。図 6.6(a)のように、Z軸方向へのせん断破壊を考えた場合、直
径 3 mmで Z方向の深さ 6 mmの円筒状の穴の側面に応力が集中するとして、その値は 5.5 MPaと
なり、ねじとヘリサートの強度(∼ 400 MPa)やCFRPの強度(830 MPa)と比べて問題は無い。X
やY軸の振動ではねじ穴の一部分に応力が集中すると考えられるが(図 6.6(b))、それでも強度の
オーダーとしては十分である。よって、ねじ穴まわりの厚みは最小の∼ 6 mmとしてよい。
M3のねじを 4本用いた場合に、CFRP構造体とねじのインターフェイスの強度に問題が無いこと
はわかったが、ねじ穴まわりの応力がBGO結晶とCFRP構造体のインターフェイスに伝わり、強度
のもっとも低い反射材(強度 ∼ 1.6 MPa)にかかることを考慮すると、あまり小さなねじを使って
応力集中をさせることは得策ではない。重量や大きさの面からみても最小のねじを使う必要はないた
め、今回の設計では、ねじの直径は余裕をみて 4 mmのものを使用する。このとき、Z軸の振動時に
ねじ穴まわりの円筒側面の応力は∼ 4.1 MPaとなり、ねじの締め付け力は∼ 2.5 kN(M4ねじの標
準締結トルクは 2.01 N·m)となる。
6.3.2 BGO結晶とCFRP構造体のインターフェイス
6.2.4項で見たように、BGO結晶とCFRP構造体のインターフェイスでもっとも弱い部分は反射材
で、反射材が剥がれたり破断したりする危険性がある。そのような破壊をもたらす応力としては、振
動時の BGO結晶の慣性力によるもの、ねじ穴から伝わる応力によるもの、および、BGO結晶、反
37
射材、接着剤、CFRPの熱膨張率の違いから起こる熱応力によるもの(BGOとCFRPは表 5.2、接
着剤は 67 × 10−6 /K、反射材は未測定)、という 3つの場合が考えられる。
まず、振動時のBGO結晶の慣性力を考える。XやY軸の振動に対する負荷として 100 Gを想定し
た場合(図 6.6b)、BGO結晶の底面は 66 × 66 mm2で重さは 1.24 kgなので、底面全体に発生する
せん断応力は∼ 0.3 MPaとなる。6.2.4節により BGO結晶と CFRP構造体のインターフェイスは、
∼ 1.6 MPaの強度をもつことが実証されているので、横方向の振動により、BGO下面や上面のイン
ターフェイスがせん断破壊する心配はなく、さらにCFRPの側面があるため、より安全である。Z軸
に加振した場合も(図 6.6a)、接着剤の引っ張り強度はいっぱんに、せん断強度よりも大きいため、
問題ないと判断できる。底面以外のインターフェイスでも、見積りは同様である。
以上のように一様な応力ならば問題ないが、現実には 6.3.1項で見たように、ねじ穴の付近には応
力が集中する。その結果、BGO結晶とねじ穴があまりに近いと、反射材の一部にクラックが生じ、
さらなる応力集中を招いて、BGO底面とCFRP構造体の間の反射材全体が剥がれたりせん断するよ
うな破壊モードが存在し得る。そのため、ねじ穴とBGO結晶の間にはCFRP板を挟むなどして、応
力を分散させる必要があるが、複合材料である CFRP内の応力伝達を求めるのは容易ではない。疑
似等方でもっとも薄いCFRP板の厚さは 1.2 mmであるため、この先、まずは 1.2 mmの板を挟んだ
として設計案を作り、その後、コンピュータを用いた有限要素法により、BGO結晶に伝わる応力を
計算する(6.5節)。
今回の設計では熱応力を逃す機構を設計するのは容易ではないため、材質である CFRP自体を改
良することで、その解決を探る。その詳細は 8.1節で述べる。
6.3.3 シールドの共振周波数
衛星や検出器の共振が数 Hzから∼ 200 Hzにまで存在する可能性があるため、シールドの共振周
波数はそれを越えなければならない(5.4節参照)。ランダム振動は 1 kHzから急激に下がるため(図
5.4参照)、共振周波数が 1 kHz以上となると、さらに安全性が高まると予想される。そこで、横方
向(X軸およびY軸)と Z軸の振動に対し、共振周波数が 1 kHzを超えるCFRPの厚みを計算する。
ここで、少々強引ではあるが、BGO結晶をはり近似して共振周波数を計算すると、もっとも低い周
波数となる固定端、自由端の場合でも、∼ 5.8 kHzとなり、試験の振動領域に対して非常に高い値に
なるため(5.3.1項参照)、BGO結晶は剛体であると仮定する。
BGO結晶を乗せる CFRPの土台として、底面が BGO結晶と同じ 66 × 66 mm2で、厚みが最小
の 7.2 mmである場合を考える。この厚みは、ねじ穴用の∼ 6 mmと、結晶をじかに乗せる板の 1.2
mmを加えたものである(6.3.1項および 6.3.2項参照)。土台上に質量mの BGO結晶を乗せて XY
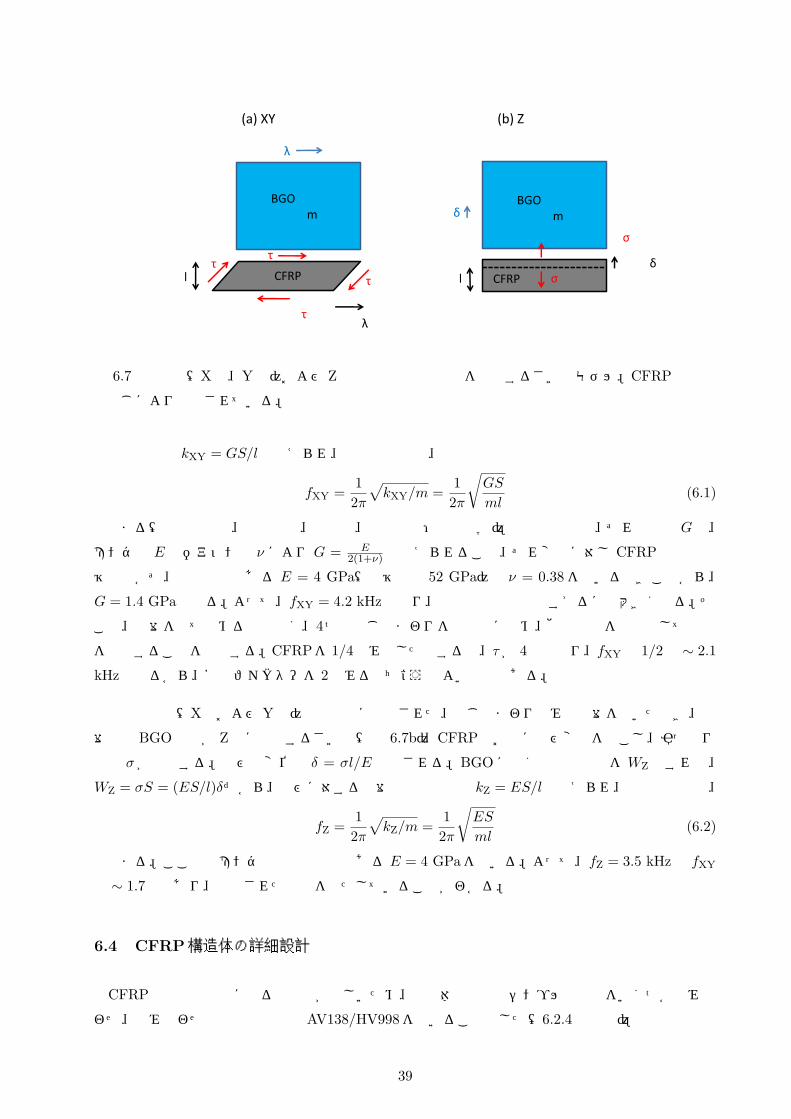
軸に振動したときは、図 6.7(a)に示すように、おもにずれ変形を起こし、せん断力 τ が発生する。
Z方向の土台の厚みを l、ずれ弾性率をGと置くと、ずれの変位は λ = lτ/Gで求まる。土台の面積
を S、BGOに働く横方向の力をWXYとすれば、WXY = τS = (GS/l)λだから、ずれに対する土台
38
BGO
m
CFRPl
λτ
τ
τ
τ
(a) XY
BGO
m
CFRPl
σ
σ
(b) Z
λ
δ
δ
図 6.7 横方向(X軸、Y軸)および Z軸方向の共振周波数を推定するさいのモデル。CFRPの底面
はねじにより固定されている。
のばね定数は kXY = GS/lで与えられ、共振周波数は、
fXY =12π
√kXY/m =
12π
√GS
ml(6.1)
と求まる(小久保邦雄、後藤芳樹、森孝男、立野昌義:材料力学)。等方材質では、ずれ弾性率Gは、
ヤング率 E とポアソン比 ν により G = E2(1+ν) で与えられること、ずれ変形に対し CFRPの強化繊
維は効かず、樹脂の値である E = 4 GPa(繊維方向 52 GPa)と ν = 0.38を用いるべきことから、
G = 1.4 GPaとなる。よって、fXY = 4.2 kHzとなり、共振周波数は十分すぎるほど大きくなる。そ
こで、土台を全て埋めるのでなく、4つのねじ穴まわりを重点的に埋め、他の部分を空間として重量
を削減することを検討する。CFRPを 1/4のみ残したとすると、τ が 4倍となり、fXYは 1/2の∼ 2.1
kHzとなるから、安全ファクターを 2倍みるとちょうどよい分量である。
上で横方向(X軸およびY軸)の振動時に議論された、ねじ穴まわりのみの土台を用いたとき、土
台上のBGO結晶が Z軸に振動するさいは(図 6.7b)、CFRPはおもに伸び変形を起こし、引っ張り
応力 σが発生する。伸びの変位は δ = σl/E で表される。BGOに働く縦方向の力をWZ とすれば、
WZ = σS = (ES/l)δだから、伸びに対する土台のばね定数は kZ = ES/lで与えられ、共振周波数は、
fZ =12π
√kZ/m =
12π
√ES
ml(6.2)
と求まる。ここでもヤング率は樹脂の値であるE = 4 GPaを用いる。よって、fZ = 3.5 kHzと fXY
の∼ 1.7倍であり、要求された条件を満たしていることがわかる。
6.4 CFRP構造体の詳細設計
CFRPは複雑な構造になると成形が難しいため、構造体の設計はシンプルな部品をいくつか組み合
わせ、組み合わせの際の接着剤はAV138/HV998を用いることとした(6.2.4節参照)。
39
(a) (b)
A
B
C
66.6 mm66.6 mm
図 6.8 土台の作成図。作成の様子を(a)は上から、(b)は下から見た様子。
土台は図 6.8に示す模式図のように、3つの部品 A、B、Cから作成することとした。BGO結晶
を乗せるのが部品 A、ねじ穴まわりの補強をするのが部品 B、衛星ハウジングと接するのが部品 C
であり、それぞれを接着して、図 6.9に示すような土台を作る。図 6.9では、振動試験で必要となる
XYZ軸の定義も同時に示してある(5.4.1項参照)。BGO結晶と接着する面の大きさは反射材の厚み
(一面∼ 0.3 mm)を足して 66.6× 66.6 mm2とし、土台全体の高さは、M4ねじ穴まわりの 6 mmと
BGOとねじ穴の間の板厚 1.2 mmを足して、7.2 mmとした(6.3.1および 6.3.2項)。ねじ穴まわり
の補強面は 16 × 17 × 4 = 1088 mm2とし、BGO結晶底面の面積 66.6 × 66.6 ' 4400 mm2の 1/4強
とした(6.3.3項の設計)。このとき、6.3.3節で l = 6 mm3、S = 1088 mm2となるから、(6.1)式か
ら横方向の共振周波数は fXY ' 2300 Hzとなり、(6.2)式から縦方向の共振周波数は fZ ' 3800 Hz
となる。土台には、さらにAPDを取り付けるための 16× 16 mm2の穴を開けている。いっぱんには
APDは面積の小さな面に付けた方が集光率が良くなるが、今回もちいる BGO結晶はほぼ立方体で
あることと、横面にAPDを取り付けると、接続ケーブルを狭いシールドとシールドの間に通さなけ
ればならず、組み上げが難しくなることから(図 3.5参照)、結晶の底面へ取り付けることとした。
土台を組み上げた次は、図 6.10(a)に示すように、土台の上にBGO結晶を接着する。その後、最
後の作成手順として、BGO結晶の保護のため、その四方から Lアングルと側板を接着し、内部確認
用の穴(振動実験での破損の確認のため)を残してBGO結晶を完全に覆うことで、ボトムシールド
の完成となる(図 6.10b)。Lアングルと側板は振動に対するシールドの強度に寄与しないため、疑
似等方で最小の厚みの 1.2 mmとしてある。
図 6.11にボトムシールドの完成写真を示す。総重量は 1323 gとなり、BGO結晶は 1241 gである
から、接着剤や反射材を含めた構造体は 82 gで、シールド全体に対するCFRPの重量比は 6.6%とな
るちなみに、「すざく」HXDの一体型シールドでは∼ 3%だった。
40
(a) (b)
66.6 mm 66.6
7.2
1616
1617
M4
APD
XYZ
図 6.9 土台の完成図。(a)は土台の外観を、(b)は内部の隠線を表示したもの。
(a) BGO (b) +BGO
66.6 mm 66.6
40.6
BGO
16x16 mm2
XYZ
XYZ
図 6.10 ボトムシールド完成までの組み上げ手順。(a)BGO結晶と土台を接着し、(b)Lアングル
と側板を接着する。
41
図 6.11 ボトムシールド完成写真。(a)は土台を下に、(b)は土台を上にして撮影したもの。
42
6.5 有限要素法を用いた強度計算
考えうる大域的な応力(せん断、引っ張りなど)に対し、予測強度の余裕がもっとも少ないのが反
射材であり、そのせん断および引っ張り強度は ∼ 1.6 MPaである。より局所的な応力集中を考える
と、BGO結晶と CFRP構造体のインターフェイスが最大の難所である。複合材である CFRP中の
応力伝達は簡単には求められないため、設計した図面に基づき、有限要素法を用いて応力集中を計算
し、設計の検証を行う。有限要素法とは、解析したい連続体を四面体のような簡単な形状の多数の要
素に分割したうえで、各要素の中では簡単な近似関数を用いて物理量の計算を行う手法である。これ
を全ての要素をつなげて行うことにより、連続体の物理状態を近似的に求める。
COSMOS/M 2007のソフトウェアを用い、四角形要素でメッシュを切り分けた。用いた材料パラ
メータはヤング率(縦弾性率)、せん断弾性率、ポアソン比、密度である。土台の底面は Z方向のみ
固定し、ねじ固定部の 4点を、並進と回転について固定してある。ねじのモデル化は行っていない。
BGO結晶をCFRP土台に接着したものを、4本のねじで固定し、X軸方向の静荷重を与えた場合
を計算したところ、図 6.12の結果が得られた。図ではブロック底面が右側面として描かれており、予
想どおり 4本のねじの付近に、応力が集中しているのがわかる。ただし応力の大きさのみを示し、そ
の方向は明示していない。その最大値はねじ穴まわりで ∼ 1.4 MPaであり、ねじ穴からの応力伝達
が、許容できる値である反射材の破断強度 1.6 MPaにまで下がっていることがわかる。ここでは 100
Gの荷重ですでに安全ファクターを 2倍ほど見積もっているため、応力集中の 1.4 MPaからさらに
安全ファクターをとり、多めに強度を要求することはしない。
Y軸や Z軸で同様の計算をした結果は、図 6.13、図 6.14に示す。XとY軸の設計が完全に対象で
はないため、図 6.13の応力分布の様子は図 6.12と異なっているが、その大きさはほぼ等しく、最大
値が∼ 1.4 MPaであり、問題は無い。ねじ穴の応力集中が少ない(6.3.1項)Z軸静荷重による応力
は、ねじ穴よりもむしろ結晶の端に集中しており、その最大値は 0.5 MPaと 3軸中でもっとも低い。
よって、応力を分散させるための、ねじ穴と結晶の間のCFRP板の厚みは、現段階の 1.2 mmのまま
で十分であることがわかった。
43
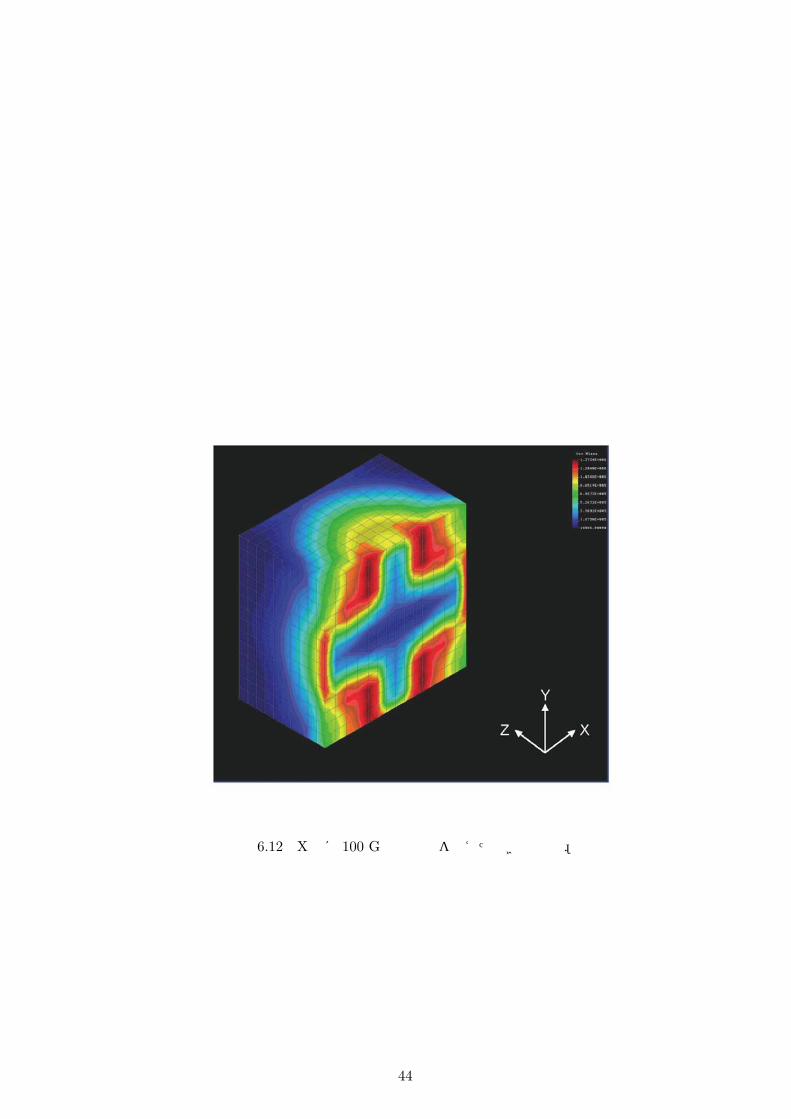
図 6.12 X軸に 100 Gの静荷重を与えたときの応力。
44
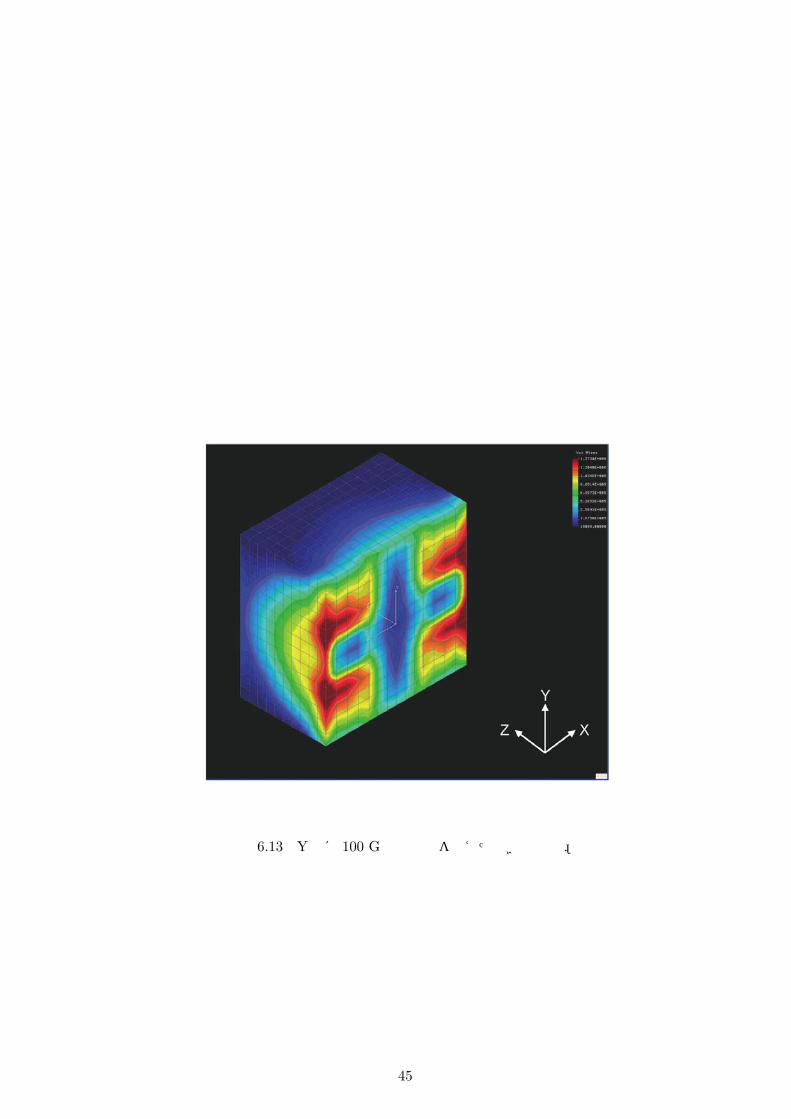
図 6.13 Y軸に 100 Gの静荷重を与えたときの応力。
45
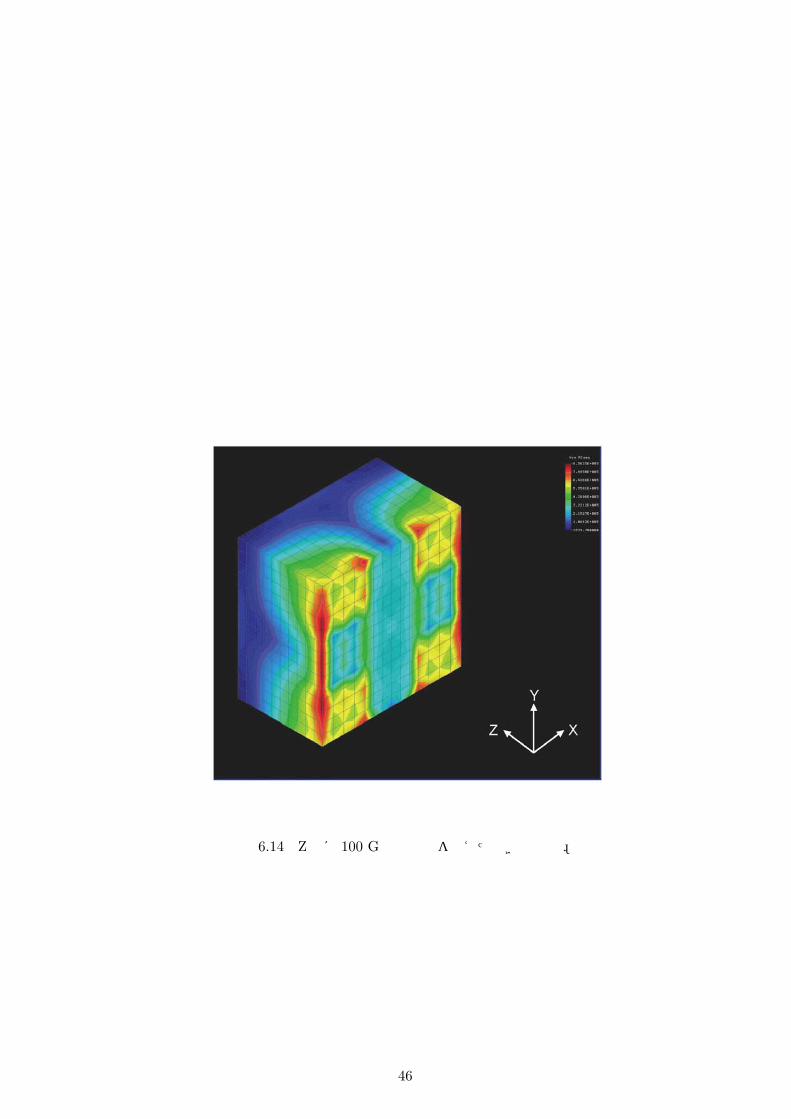
図 6.14 Z軸に 100 Gの静荷重を与えたときの応力。
46
7 振動試験
7.1 試験内容
第 6章で、ボトムシールドの設計が十分な機械的強度をもつことが、計算により示された。しか
し実験による検証は、済んでいない。そこで、第 6章で製作したBGOボトムシールドおよびそのダ
ミーに対し、もっとも厳しい試験項目であるランダム試験を行い、設計の最終的な検証を行う。
7.1.1 試験事項と手順
機械試験は、ボトムシールドを頑丈な平版状の治具に 4本のねじで止めた状態で、X、Y、および
Z軸方向にランダム振動することで行う。加振レベルは図 5.4のものを用い、各軸について、まずパ
ワーを-21 dBに下げた「モーダルサーベイ」を行って、供試体の各部の応答を計測し、共振モード、
その周波数、共振倍率などを求める。これで予測と大きな相違がなければ、規定どおりの強度(0 dB)
での「強度試験」を 80秒間にわたり行う。これを突破したのちは、改めて-21 dBのモーダルサーベ
イを行い、1軸の試験を終了する。
強度試験で供試体に明らかな破損が無かったとしても、BGO結晶にクラックが入ったり、反射材
に部分的なはがれが生じている危険性がある。そのため 2つの手段を用いる。1つは、強度試験の前
と後に行うモーダルサーベイで、各部の応答を調べることであり、これは微小な破損が生じると、機
械的特性(共振周波数や倍率など)に変化が生じやすいことを利用する。もう 1つは、側板に空けた
穴からBGO結晶を目視することである。結晶にクラックが入ると、そこで反射が生じ、虹のような
干渉が見えることが多い。
BGO結晶を用いたボトムシールドの試験の前に、構造体は同じ設計であるが結晶部分を機械的特
性の近い真鍮(表 5.2参照)に変えたダミーで予備実験を行う。真鍮の大きさは 66 × 66 × 40 mm3
と等しく、重さは 1463 gで ∼ 1.2倍となる。ダミーの振動試験を先に行うことで、構造体の強度を
確認し、万が一の設計ミスにより、高価な BGO結晶が破損するのを防ぐのが目的である。
7.1.2 試験機器
試験は、神奈川県相模原市に位置する IMV(株)東京支社の、型名 i240という中型加振機で行っ
た。加振機の諸元を表 7.1に、概観を図 7.1に示す。試験をするためにはボトムシールドを加振機に
取り付ける治具が必要であり、その設計については次節で述べる。図 7.1では加振機のテーブルに、
設計した治具が乗っている。
加振機は、コンピュータでランダムな信号を発生し、それを大電流アンプで増幅し、コイルに通電
して加振台の振動を発生させるしくみとなっている。Z軸加振ではこの加振台を上に向け、治具をそ
の上に直接に取り付ける。横加振ではこの加振台を横倒しにし、水平滑りテーブル(油ベア燐ン愚で
浮上し滑らかに水平に動く)の端面に結合する。
47
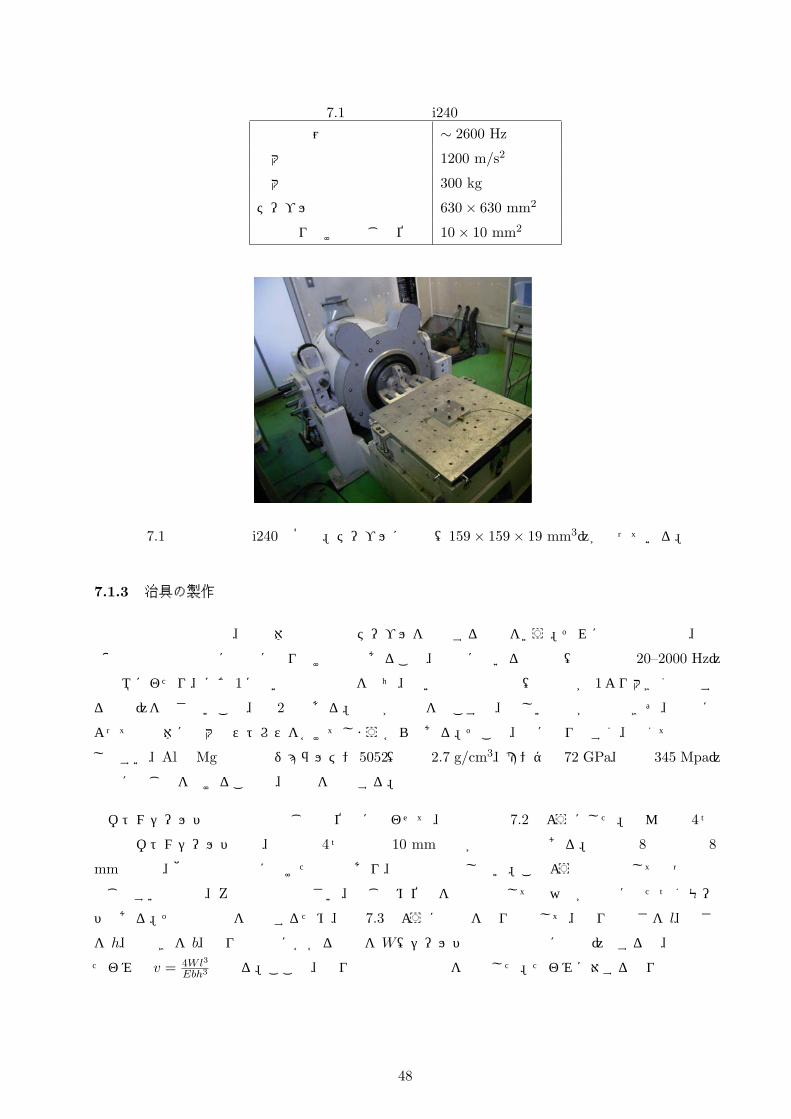
表 7.1 中型加振機 i240の諸元振動数範囲 ∼ 2600 Hz
最大加速度 1200 m/s2
最大搭載質量 300 kg
テーブル寸法 630 × 630 mm2
治具取り付け用ねじ穴位置 10 × 10 mm2四方
図 7.1 中型加振機 i240の概観。テーブルに治具(159 × 159 × 19 mm3)が乗っている。
7.1.3 治具の製作
振動試験の治具とは、供試体と加振機のテーブルを結合する機構をいう。それに必要な条件は、試
験片と加振機の両方に堅固に取り付け可能であること、試験に用いる振動数(今の場合 20–2000 Hz)
の全域にわたり、ほぼ 1に近い振動伝達率をもち、強い共振や反共振(伝達率が 1より大きく低下す
る現象)を示さないこと、の 2点である。治具が共振を起こすと、正しい試験が実行できず、場合に
よって供試体に過大なストレスをかけてしまうからである。そこで、手に入りやすく、軽くて加工の
しやすい、AlとMgの合金のジュラルミン 5052(密度 2.7 g/cm3、ヤング率 72 GPa、強度 345 Mpa)
の板にねじ穴を空けることで、治具を製作する。
ボトムシールドと加振機のねじ穴の位置に合わせて、設計は図 7.2のようにした。真ん中の 4つ
の穴はボトムシールド用で、外側の 4つの直径 10 mmの穴が加振機用である。外側の 8個の直径 8
mmの穴は、他の加振機用に空けたものであり、今回は使用しない。このような治具としてもっとも
生じやすい共振は、Z方向の加振のさい、ねじ止め位置を固定端として中央部が上下にばたつくモー
ドである。その周波数を計算するため、図 7.3のように治具をはり近似して、はりの長さを l、高さ
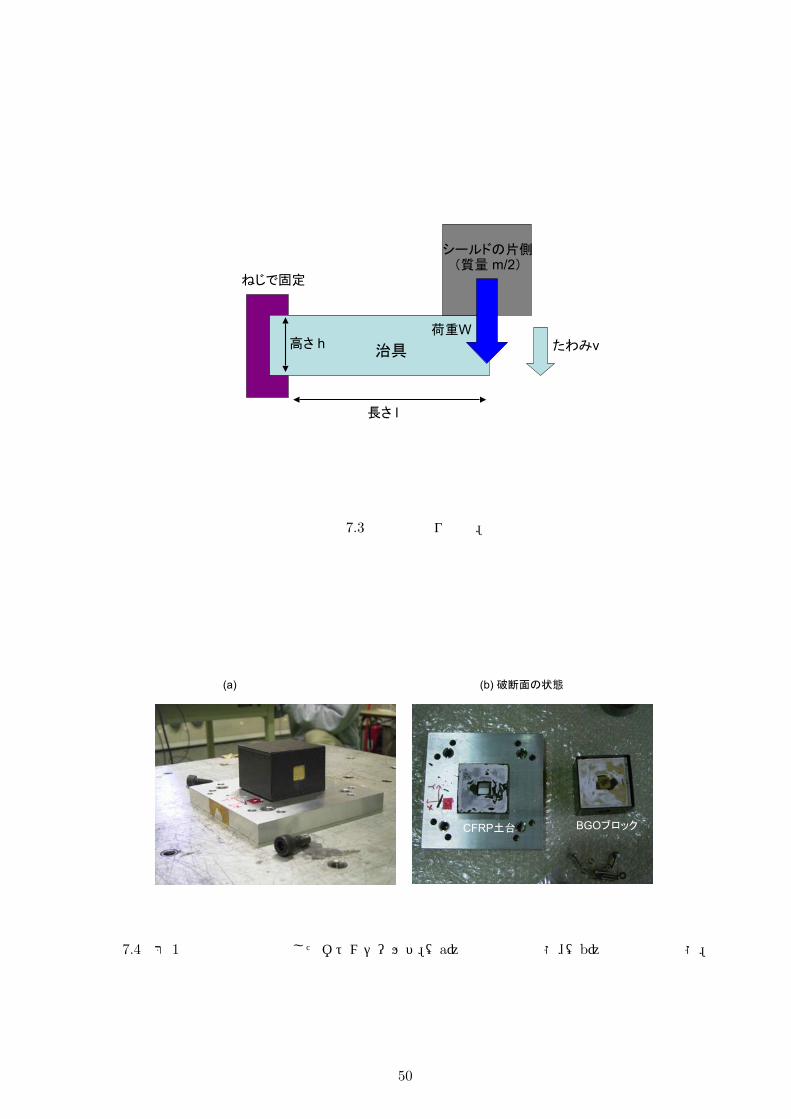
を h、奥行きを b、はりの先端にかかる荷重をW(シールドの半分の荷重に相当)とすると、先端の
たわみは v = 4Wl3
Ebh3 となる。ここで、はりの断面は長方形を仮定した。たわみに対するはりのばね定
48
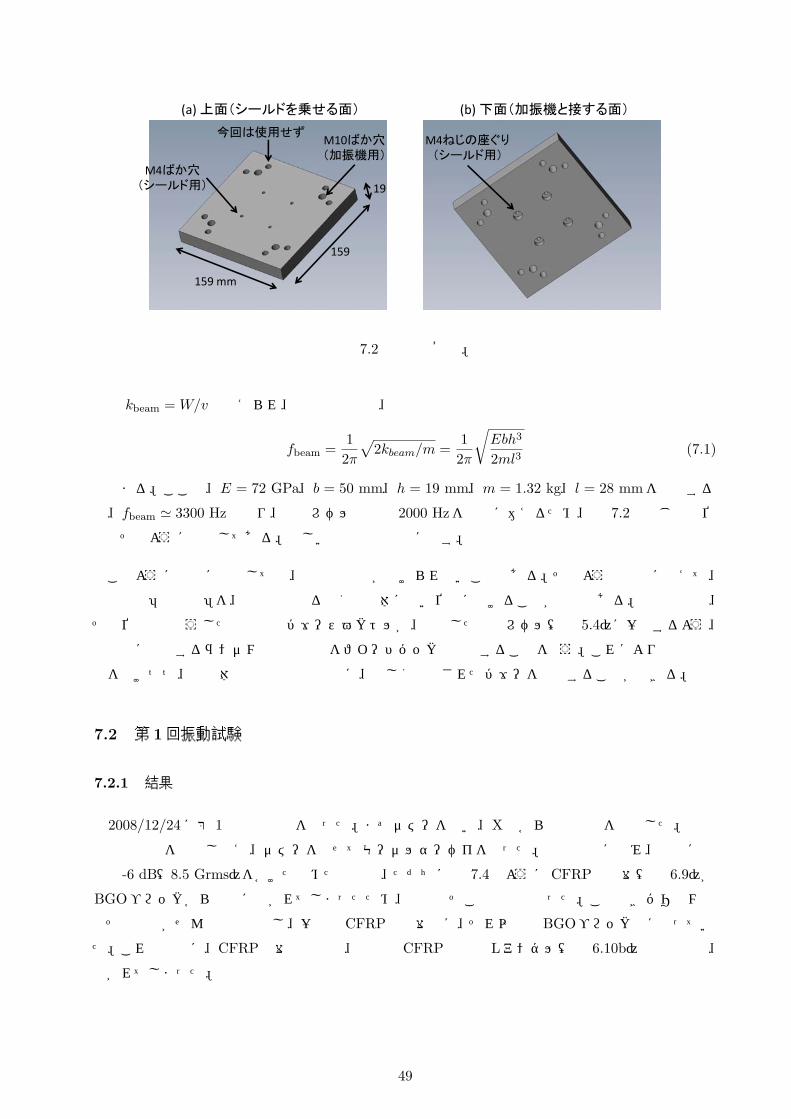
(a) (b)
159 mm
159
19
M4
M10 M4
図 7.2 治具の概観。
数は kbeam = W/vで与えられ、共振周波数は、
fbeam =12π
√2kbeam/m =
12π
√Ebh3
2ml3(7.1)
と求まる。ここで、E = 72 GPa、b = 50 mm、h = 19 mm、m = 1.32 kg、l = 28 mmを代入する
と、fbeam ' 3300 Hzとなり、振動レベルの上限 2000 Hzを十分に越えるため、図 7.2のねじ穴の位
置もそのように設計してある。詳しい設計図は付録に示す。
このように慎重に設計しても、治具の共振が避けられないこともある。そのような状況に備えて、
加振時の「制御点」を、治具上でなるべく供試体に近い位置に設けることが重要である。制御点とは、
その位置で計測うした加速度のパワースペクトルが、指定した加振レベル(図 5.4)に一致するよう、
加振機に入力するランダム信号の波形をフィードバックで制御することを言う。これにより治具の共
振を避けつつ、供試体と治具の境界部分に、正しく指定されたパワーを入力することができる。
7.2 第 1回振動試験
7.2.1 結果
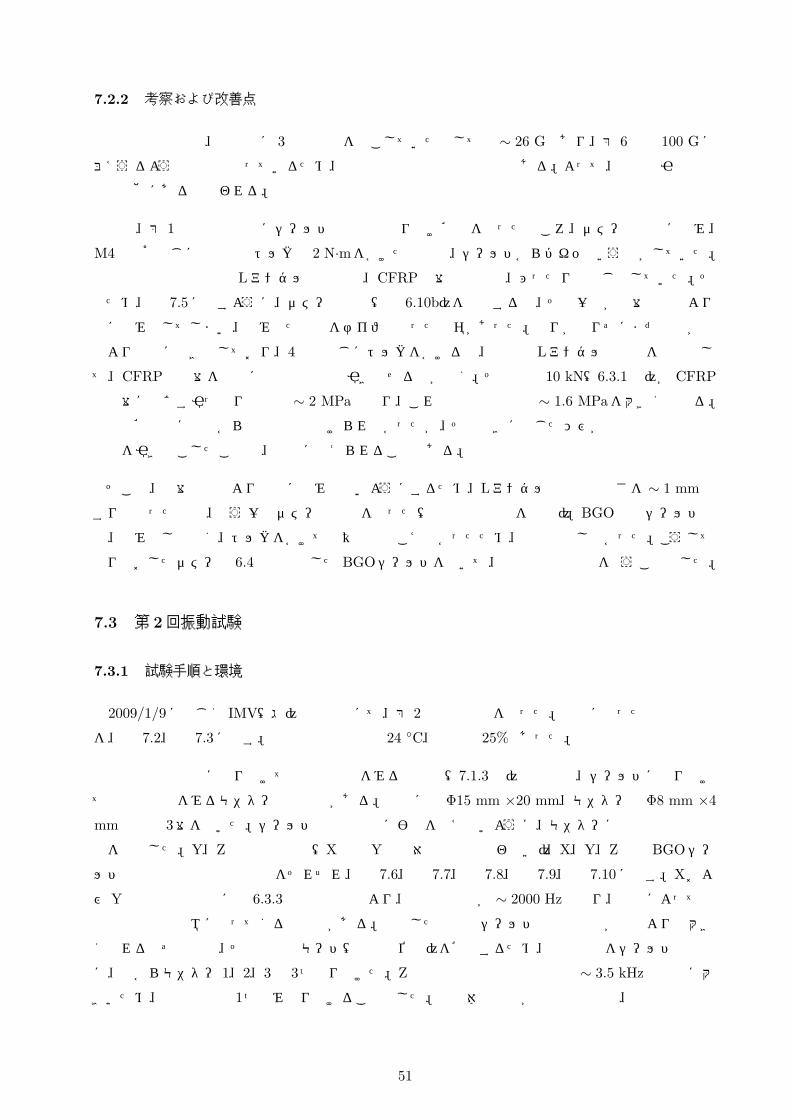
2008/12/24に第 1回振動試験を行った。まずダミーを用い、X軸から振動試験を開始した。治具
の共振特性を測定し終え、ダミーを乗せてモーダルサーベイを行った。強度試験に進み、最初に規
定の-6 dB(8.5 Grms)をかけた始めた時点で、ただちに図 7.4のようにCFRPの土台(図 6.9)が
BGOブロックから完全にはがれてしまったため、試験はそこで終了となった。このときバリウムの
層そのものがせん断力で破断し、一部はCFRPの土台側に、それ以外はBGOブロック側に残ってい
た。これと同時に、CFRP土台の側面と、側面のCFRP側板や Lアングル(図 6.10b)との接着も、
はがれてしまった。
49
l
W
m/2
v h
図 7.3 治具のはり近似。
(a) (b)
CFRP BGO
図 7.4 第 1回振動試験で破損したボトムシールド。(a)は試験後の状態、(b)は破断面の状態。
50
7.2.2 考察および改善点
試験時の負荷は、瞬間的に 3倍の振動を起こしていたとしても∼ 26 Gであり、第 6章で 100 Gに
耐えうるような設計となっているため、今回の破損は不可解なものである。よって、真の原因は振動
試験の他にあると思われる。
実は、第 1回試験の前日にシールドと治具の取り付け確認を行ったところ、ダミーの場合にのみ、
M4の六角ねじに標準締結トルクの 2 N·mをかけた時点で、シールドからパキッという音がしていた。現在の設計では側板や Lアングルの下端は、CFRP土台の下面と、ぴったりと同じとしていた。そ
のため、図 7.5に示すように、ダミーの側板(図 6.10b)を接着する際、その一部が土台の底面より
下にはみ出してしまい、はみ出た部分をナイフで削った経緯があった。削りが足りずにまだ側板が底
面よりも下に突き出しており、4本のねじにトルクをかけると、側板や Lアングルの下端を支点とし
て、CFRPの土台を無理に治具の方向へ引き寄せる力が働く。その荷重 10 kN(6.3.1節)が CFRP
の土台に及ぼす引っ張り応力は∼ 2 MPaとなり、これは反射材の強度∼ 1.6 MPaを大きく上回る。
前日の確認時に外部からは破損は見受けられなかったが、そのときに生じたひびが振動試験時の応力
集中を引き起こしたことは、十分に考えられることである。
そこで、土台の底面よりも下にはみ出ないようにするため、Lアングルや側板の高さを∼ 1 mmや
すりで削った上で、もう一度ダミーの製作を行った(設計図は付録を参照)。BGO結晶シールドで
は、はみ出しもなく、トルクをかけても異音は聞こえなかったため、再製作はしなかった。こうして
作りなおしたダミーと 6.4節で製作したBGOシールドを用いて、次回の振動試験を行うこととした。
7.3 第 2回振動試験
7.3.1 試験手順と環境
2009/1/9に同じく IMV(株)東京支社にて、第 2回振動試験を行った。当日に行った試験の手順
を、表 7.2、表 7.3に示す。試験室内の気温は 24 ◦C、湿度は 25%であった。
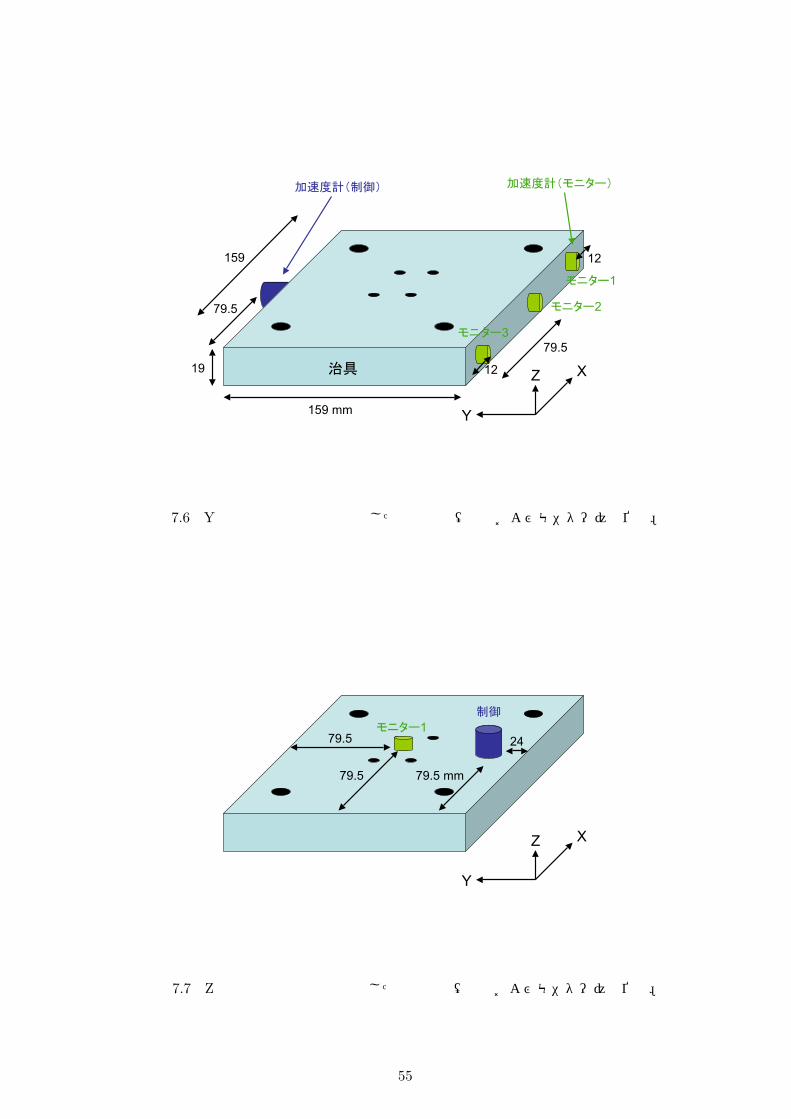
加速度計は治具に取り付けて入力の信号をみる制御用(7.1.3節)のものと、シールドに取り付け
て出力の信号をみるモニター用のものがある。制御にはΦ15 mm ×20 mm、モニターは Φ8 mm ×4
mmのもの 3台を用いた。シールドの共振特性に影響を与えないように、モニターには小型の加速度
計を採用した。Y、Z軸の治具試験(X軸はY軸と対象なので行わない)、X、Y、Z軸の BGOシー
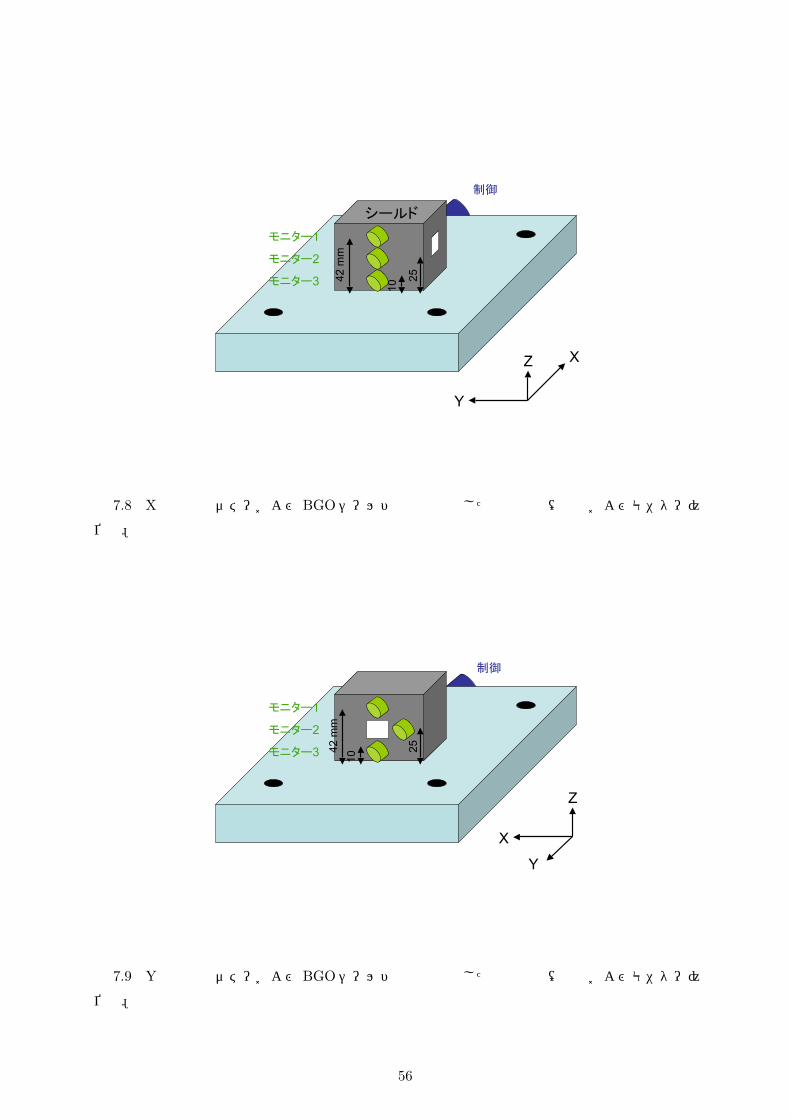
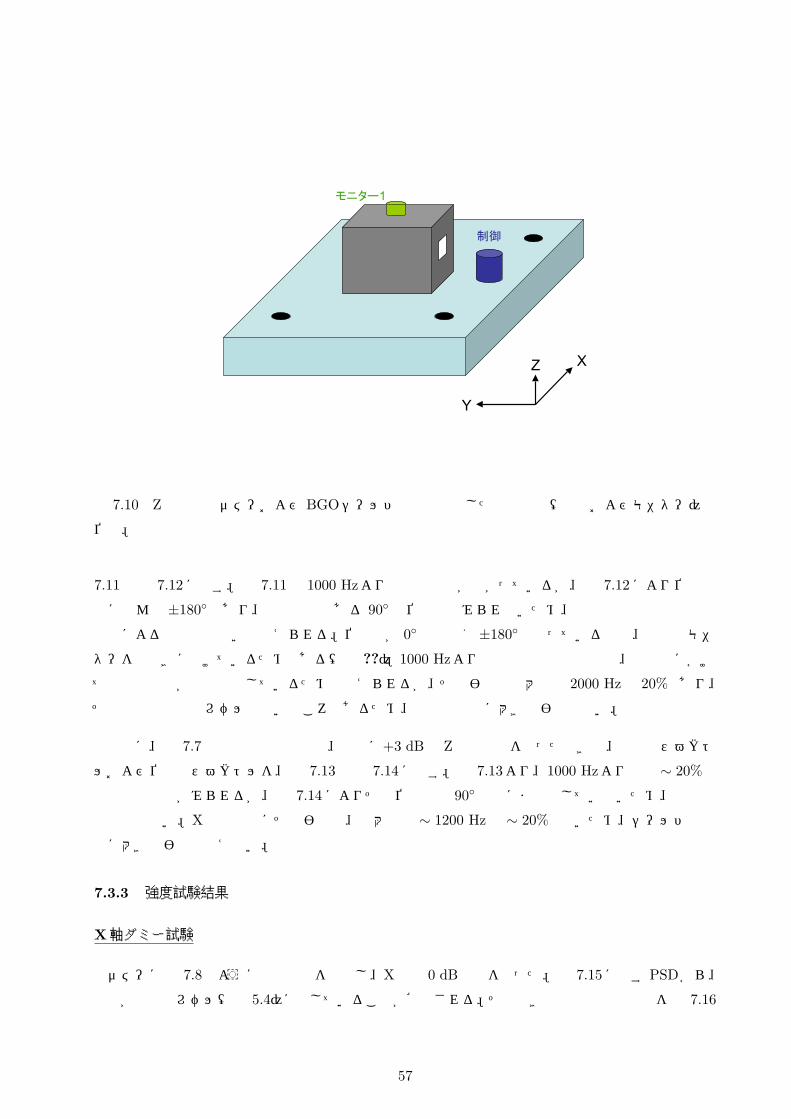
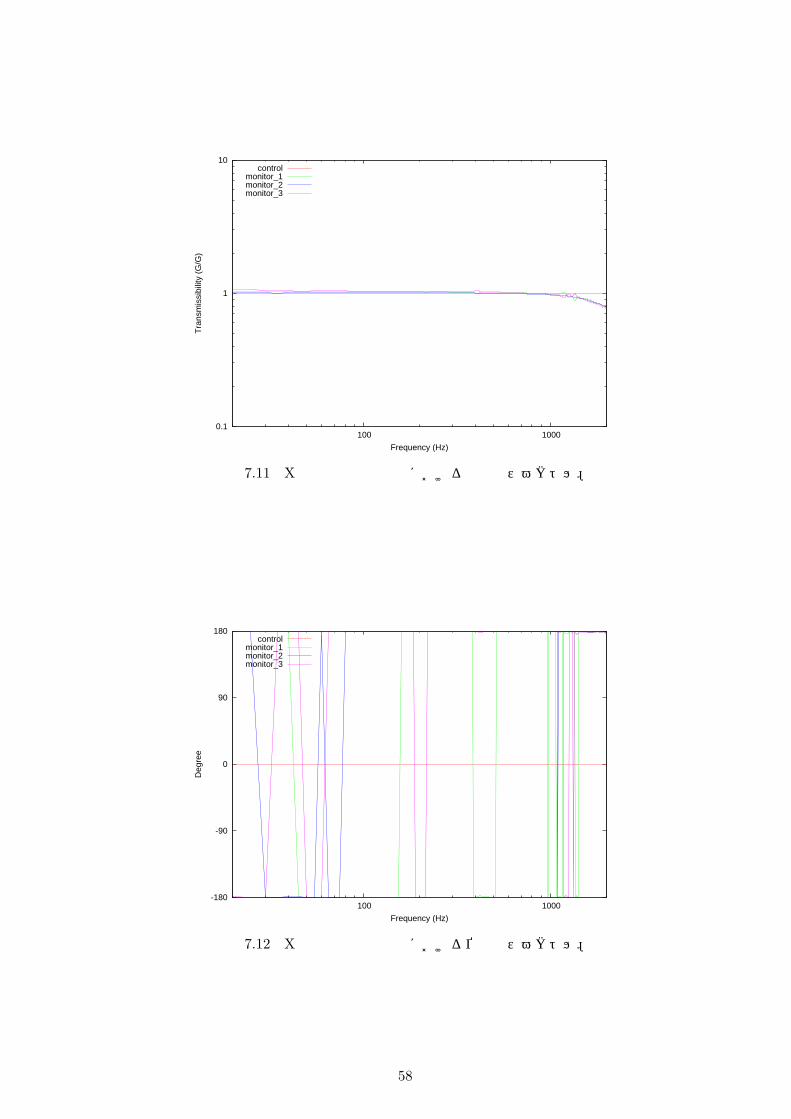
ルド試験での加速度計の配置をそれぞれ、図 7.6、図 7.7、図 7.8、図 7.9、図 7.10に示す。Xおよ
びY軸方向の加振時には 6.3.3節の近似計算より、共振周波数が∼ 2000 Hzとなり、場合によっては
試験の周波数領域に入ってくる可能性がある。共振した場合はシールドの上部の方が下部よりも大き
く揺れるはずなので、その共振のモード(振幅と位相)を確認するため、加速度計をシールドの側面
に、上からモニター 1、2、3と 3つ取り付けた。Z軸の加振時は近似計算でも∼ 3.5 kHzと十分に大
きいため、加速度計は 1つのみ取り付けることとした。供試体の形状が複雑な場合は、加振方向と直
51
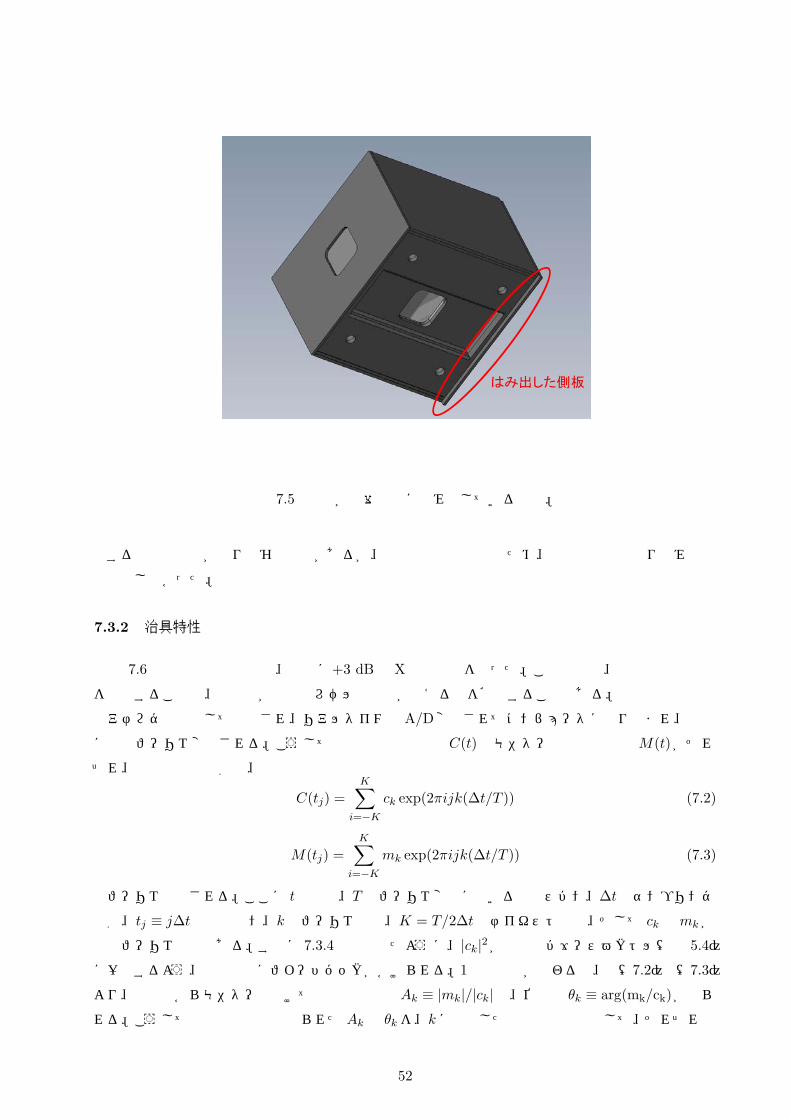
図 7.5 側板が土台の下にはみ出している様子。
交する方向へ振動が回り込む危険性があるが、今回は単純な形状のため、直交方向への回り込み応答
は計測しなかった。
7.3.2 治具特性
図 7.6の加速度計の配置で、治具に+3 dBのX軸の加振を行った。この目的は、治具の共振特性
を測定することと、加振機が十分なレベルで加振が行えるのを確認することである。加速度計の信号
はアナログ信号として伝達され、リアルタイムでA/D変換されてコンピュータに取り込まれ、同時
に高速フーリエ変換される。こうして制御点での加速度 C(t)とモニター点での計測値M(t)がそれ
ぞれ、適当な時間間隔で、
C(tj) =K∑
i=−K
ck exp(2πijk(∆t/T )) (7.2)
M(tj) =K∑
i=−K
mk exp(2πijk(∆t/T )) (7.3)
とフーリエ表示される。ここに tは時間、T はフーリエ変換に用いる時間スパン、∆tはサンプリング
間隔、tj ≡ j∆tは時間ビン、kはフーリエ波数、K = T/2∆tはナイキスト波数、そして ckとmkが
複素フーリエ成分である。すでに 7.3.4節で述べたように、|ck|2が指定のパワースペクトル(図 5.4)
に一致するよう、入力信号にフィードバックがかけられる。1回の加振が終わると、式(7.2)と(7.3)
より、制御点からモニターへ向けての振幅伝達率Ak ≡ |mk|/|ck|と、位相差 θk ≡ arg(mk/ck)が得ら
れる。こうして治具特性試験で得られたAkと θkを、kに比例した周波数の関数として、それぞれ図
52
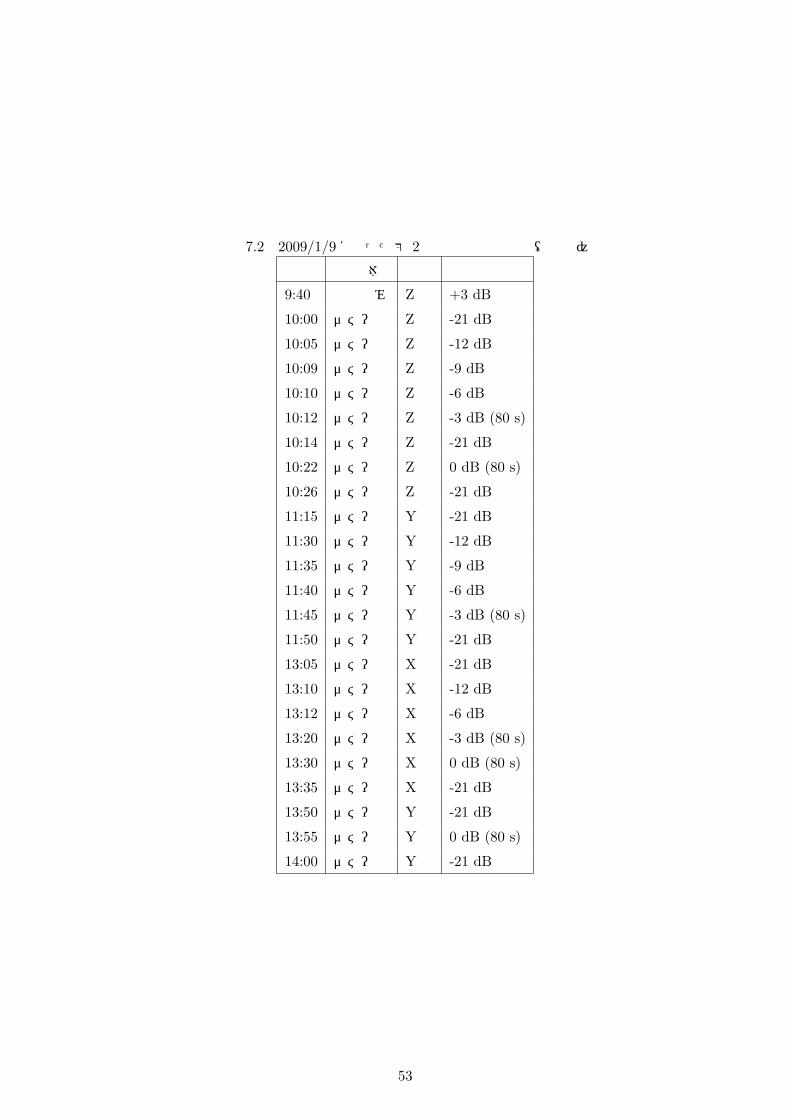
表 7.2 2009/1/9に行った第 2回振動試験の手順(前半)
時刻 供試体 軸 試験強度
9:40 治具のみ Z軸 +3 dB
10:00 ダミー Z軸 -21 dB
10:05 ダミー Z軸 -12 dB
10:09 ダミー Z軸 -9 dB
10:10 ダミー Z軸 -6 dB
10:12 ダミー Z軸 -3 dB (80 s)
10:14 ダミー Z軸 -21 dB
10:22 ダミー Z軸 0 dB (80 s)
10:26 ダミー Z軸 -21 dB
11:15 ダミー Y軸 -21 dB
11:30 ダミー Y軸 -12 dB
11:35 ダミー Y軸 -9 dB
11:40 ダミー Y軸 -6 dB
11:45 ダミー Y軸 -3 dB (80 s)
11:50 ダミー Y軸 -21 dB
13:05 ダミー X軸 -21 dB
13:10 ダミー X軸 -12 dB
13:12 ダミー X軸 -6 dB
13:20 ダミー X軸 -3 dB (80 s)
13:30 ダミー X軸 0 dB (80 s)
13:35 ダミー X軸 -21 dB
13:50 ダミー Y軸 -21 dB
13:55 ダミー Y軸 0 dB (80 s)
14:00 ダミー Y軸 -21 dB
53
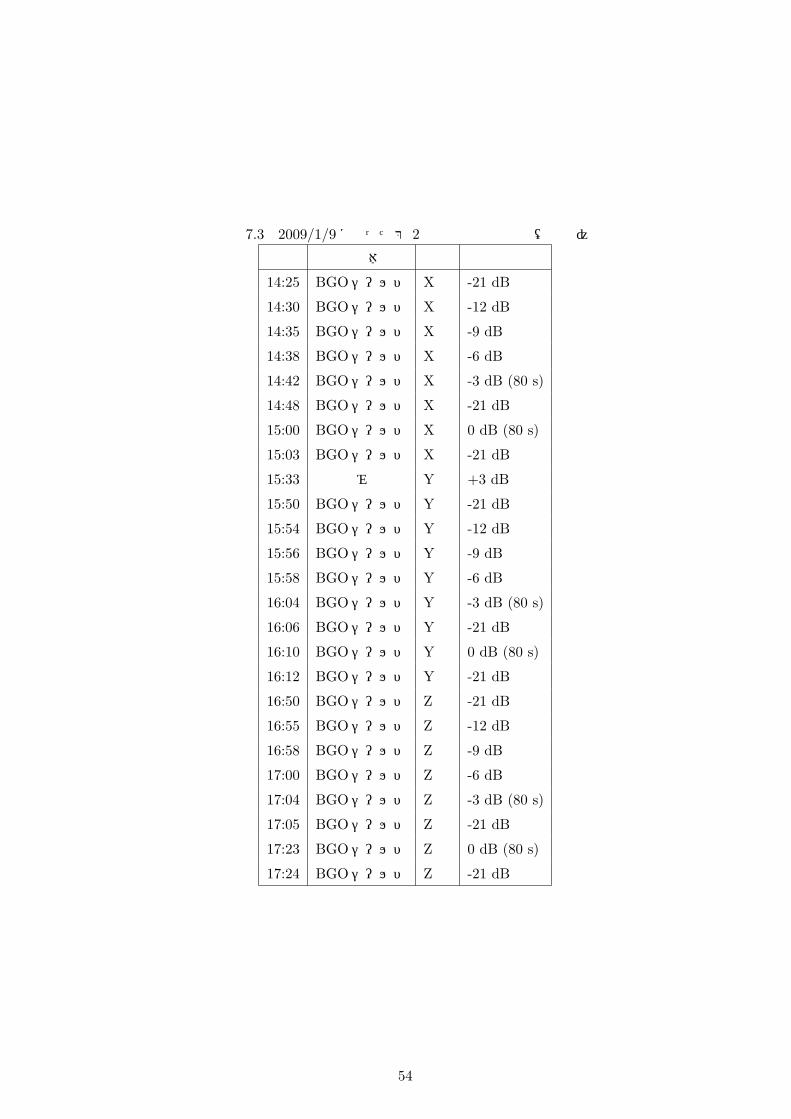
表 7.3 2009/1/9に行った第 2回振動試験の手順(後半)
時刻 供試体 軸 試験強度
14:25 BGOシールド X軸 -21 dB
14:30 BGOシールド X軸 -12 dB
14:35 BGOシールド X軸 -9 dB
14:38 BGOシールド X軸 -6 dB
14:42 BGOシールド X軸 -3 dB (80 s)
14:48 BGOシールド X軸 -21 dB
15:00 BGOシールド X軸 0 dB (80 s)
15:03 BGOシールド X軸 -21 dB
15:33 治具のみ Y軸 +3 dB
15:50 BGOシールド Y軸 -21 dB
15:54 BGOシールド Y軸 -12 dB
15:56 BGOシールド Y軸 -9 dB
15:58 BGOシールド Y軸 -6 dB
16:04 BGOシールド Y軸 -3 dB (80 s)
16:06 BGOシールド Y軸 -21 dB
16:10 BGOシールド Y軸 0 dB (80 s)
16:12 BGOシールド Y軸 -21 dB
16:50 BGOシールド Z軸 -21 dB
16:55 BGOシールド Z軸 -12 dB
16:58 BGOシールド Z軸 -9 dB
17:00 BGOシールド Z軸 -6 dB
17:04 BGOシールド Z軸 -3 dB (80 s)
17:05 BGOシールド Z軸 -21 dB
17:23 BGOシールド Z軸 0 dB (80 s)
17:24 BGOシールド Z軸 -21 dB
54
X
Y
Z
159 mm
159
19
79.5
12
12
79.5
1
2
3
図 7.6 Y軸方向の治具試験で設置した加速度計(制御およびモニター)の位置。
X
Y
Z
79.51
79.5 79.5 mm
24
図 7.7 Z軸方向の治具試験で設置した加速度計(制御およびモニター)の位置。
55
Y
XZ
3
2
1
10 2
5
42 m
m
図 7.8 X軸方向のダミーおよび BGOシールド試験で設置した加速度計(制御およびモニター)の
位置。
X
Y
Z
3
2
1
10 2
5
42 m
m
図 7.9 Y軸方向のダミーおよび BGOシールド試験で設置した加速度計(制御およびモニター)の
位置。
56
Y
XZ
1
図 7.10 Z軸方向のダミーおよびBGOシールド試験で設置した加速度計(制御およびモニター)の
位置。
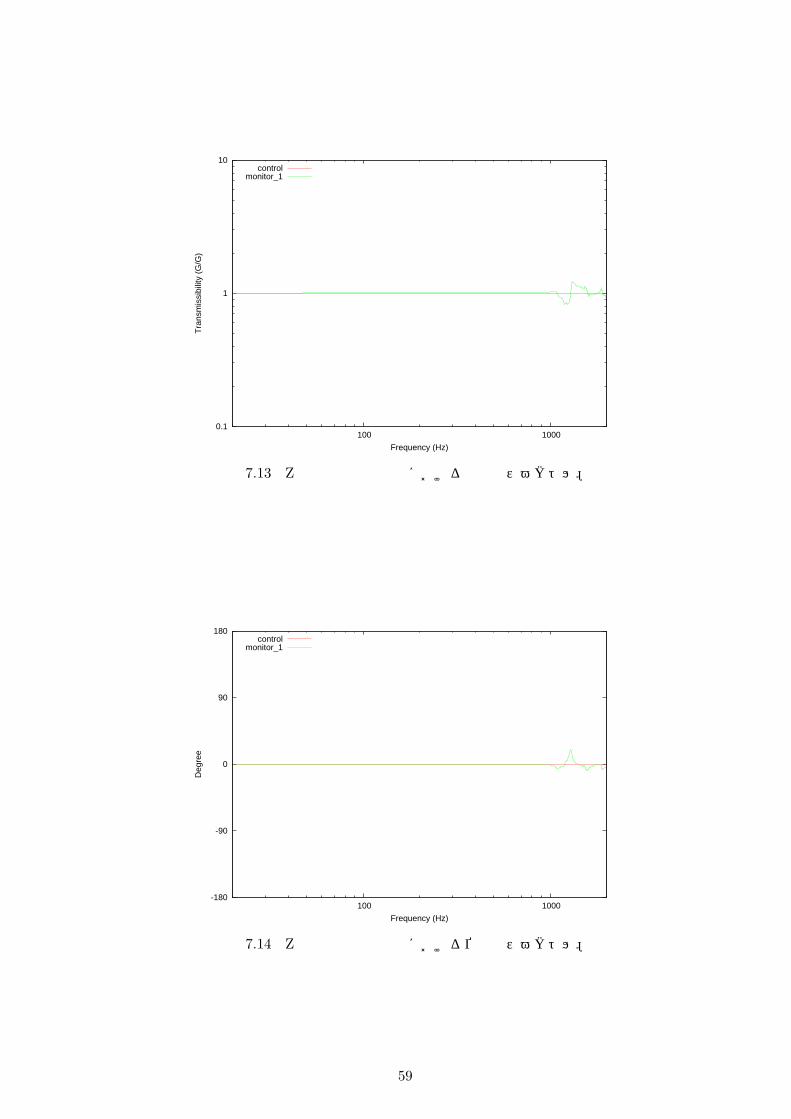
7.11と図 7.12に示す。図 7.11で 1000 Hzより上で伝達率が下がっているが、図 7.12により位相差
はほとんど ±180◦であり、共振特性である 90◦の位相差はみられないため、伝達率の減衰は治具の
共振によるものではないと考えられる。位相差が 0◦ではなく±180◦となっているのは、制御とモニ
ターを逆向きに付けているためである(図 ??)。1000 Hzより上での伝達率の減衰は、高周波にかけ
て治具の剛性がやや減少しているためと考えられるが、その影響は最大でも 2000 Hzで 20%であり、
その振動数も振動レベルの低いところであるため、試験の目的に大きな影響は無い。
同様に、図 7.7の加速度計の配置で、治具に+3 dBの Z軸の加振を行ったときの、伝達率スペクト
ルおよび位相差スペクトルを、図 7.13と図 7.14に示す。図 7.13より、1000 Hzより上で∼ 20%の
伝達率の増減がみられるが、図 7.14によりその位相差は 90◦付近にまで達していないため、顕著な
共振ではない。X軸と同様にその影響は、最大でも∼ 1200 Hzで∼ 20%と低いため、シールドの振
動に大きな影響は与えない。
7.3.3 強度試験結果
X軸ダミー試験
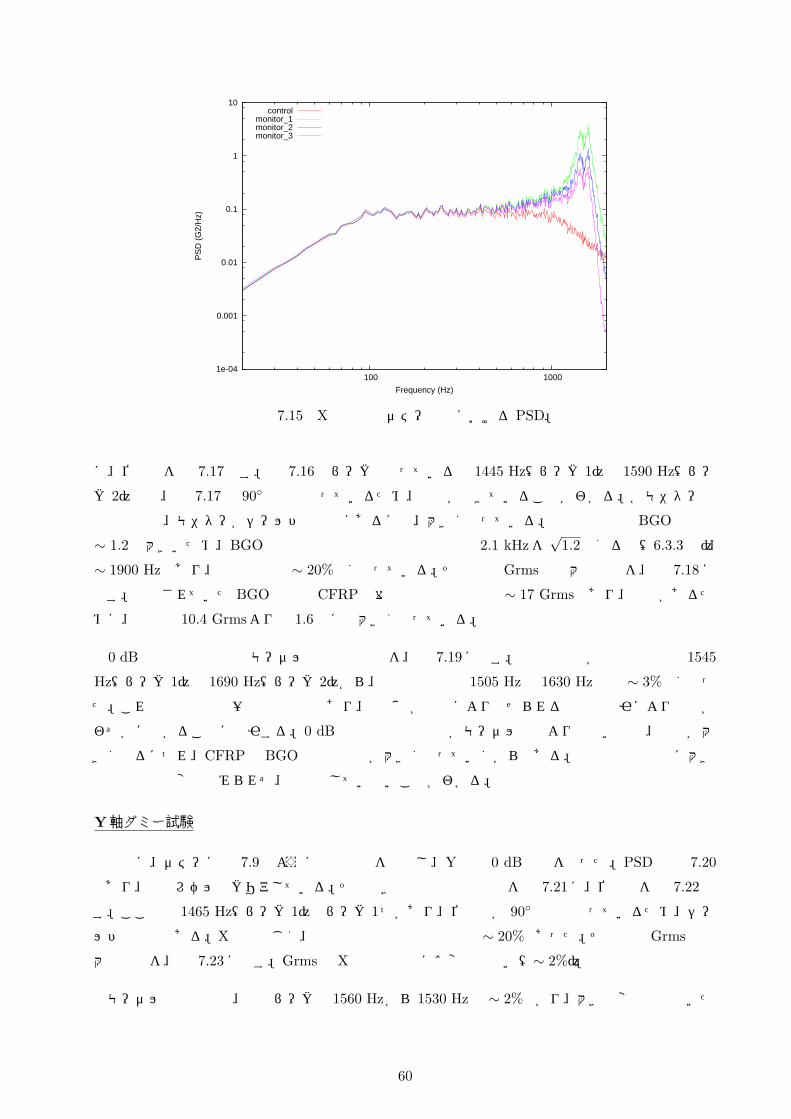
ダミーに図 7.8のように加速度計を配置し、X軸の 0 dB加振を行った。図 7.15に示すPSDから、
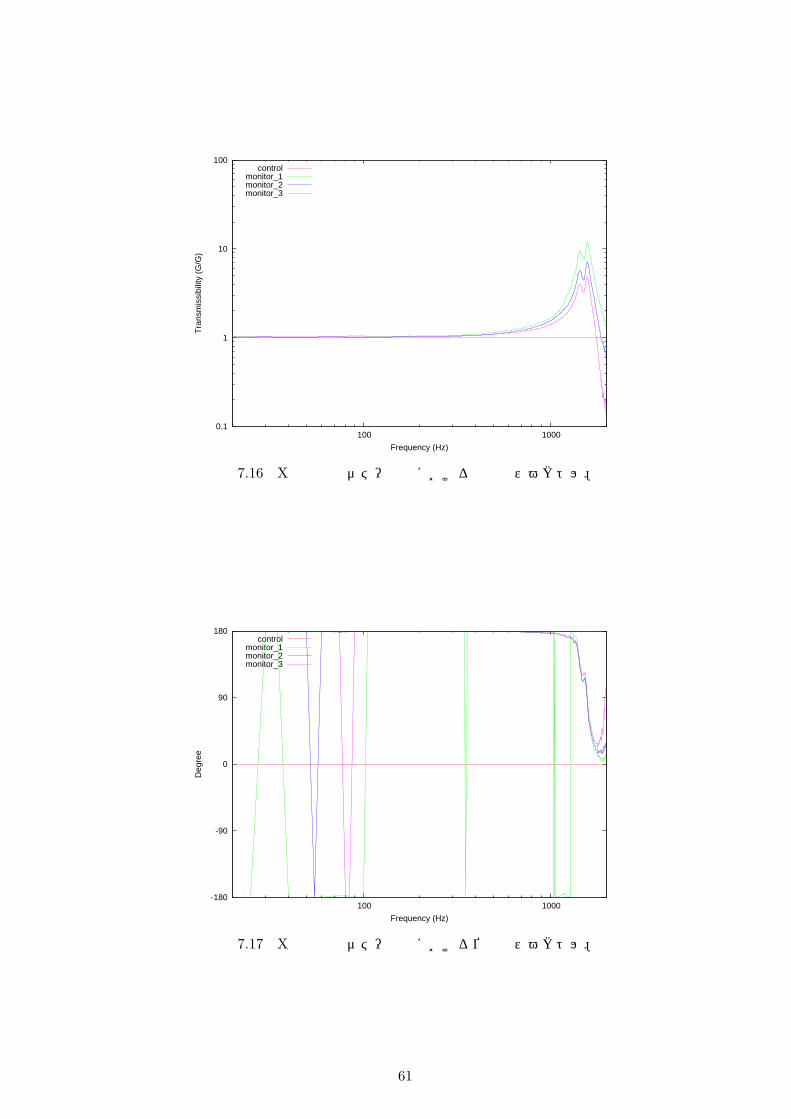
振動が目的のレベル(図 5.4)に達していることが確認される。そのときの加速度の伝達率を図 7.16
57
0.1
1
10
100 1000
Tra
nsm
issi
bilit
y (G
/G)
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.11 X軸方向の治具試験における伝達率スペクトル。
-180
-90
0
90
180
100 1000
Deg
ree
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.12 X軸方向の治具試験における位相差スペクトル。
58
0.1
1
10
100 1000
Tra
nsm
issi
bilit
y (G
/G)
Frequency (Hz)
controlmonitor_1
図 7.13 Z軸方向の治具試験における伝達率スペクトル。
-180
-90
0
90
180
100 1000
Deg
ree
Frequency (Hz)
controlmonitor_1
図 7.14 Z軸方向の治具試験における位相差スペクトル。
59
1e-04
0.001
0.01
0.1
1
10
100 1000
PS
D (
G2/
Hz)
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.15 X軸方向のダミー試験における PSD。
に、位相差を図 7.17示す。図 7.16でピークとなっているの 1445 Hz(ピーク 1)と 1590 Hz(ピー
ク 2)では、図 7.17で 90◦付近となっているため、共振が起きていることがわかる。各モニターで
の測定値は、モニターがシールドの上部にあるほど、大きくなっている。真鍮の密度はBGO結晶の
∼ 1.2倍大きいため、BGO結晶の共振周波数の近似計算の値 2.1 kHzを√
1.2で割ると(6.3.3項)、
∼ 1900 Hzであり、実際の値は∼ 20%低くなっている。その際のGrmsと最大加速度を、図 7.18に
示す。懸念されていた BGO結晶と CFRP土台の境界面の加振は∼ 17 Grmsであり、共振があるた
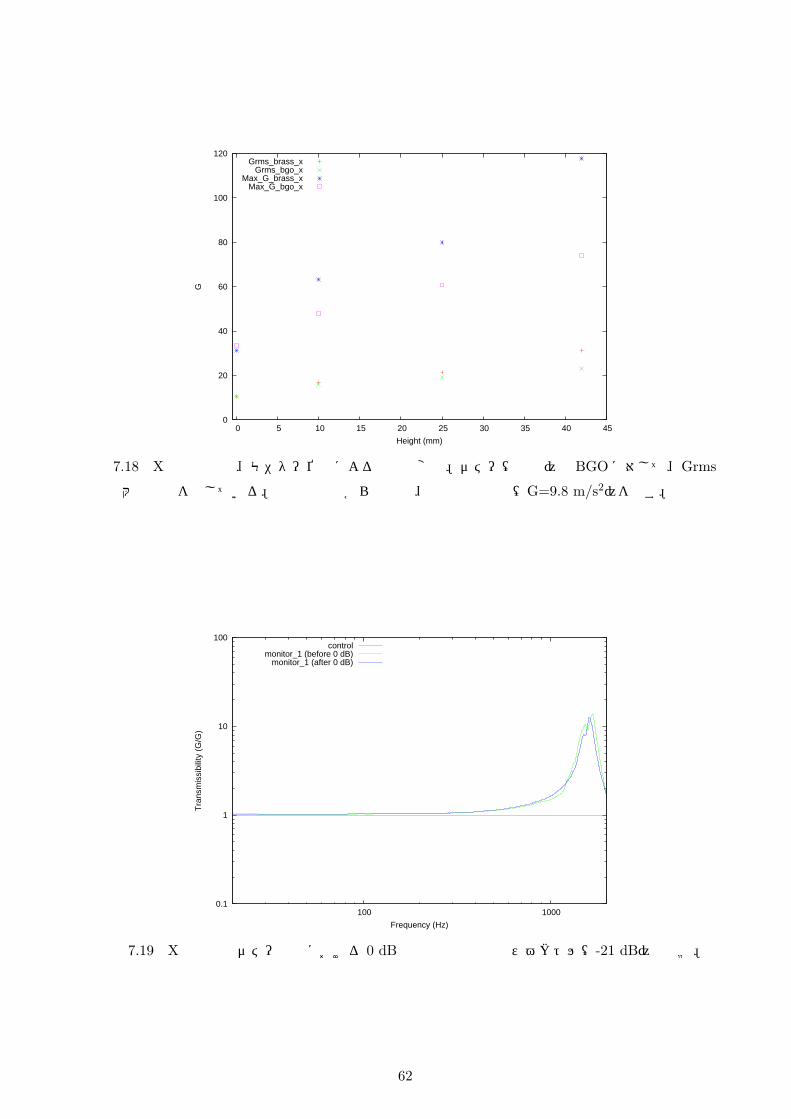
めに、入力の 10.4 Grmsよりも 1.6倍ほど大きくなっている。
0 dB強度試験の前後のモーダル試験の伝達率を、図 7.19に示す。共振周波数が強度試験前の 1545
Hz(ピーク 1)と 1690 Hz(ピーク 2)から、強度試験後の 1505 Hzと 1630 Hzへと∼ 3%低くなっ
た。これは振動試験の一般的な特性であり、試験片が振動により熱せられるなどの要因により剛性が
わずかに下がることに起因する。0 dB試験の共振周波数がモーダル試験よりも低いのは、振動が大
きくなるにつれ、CFRPやBGO結晶の減衰が大きくなっていくからである。強度試験の前後に大き
な共振特性の変化はみられず、破損はしていないことがわかる。
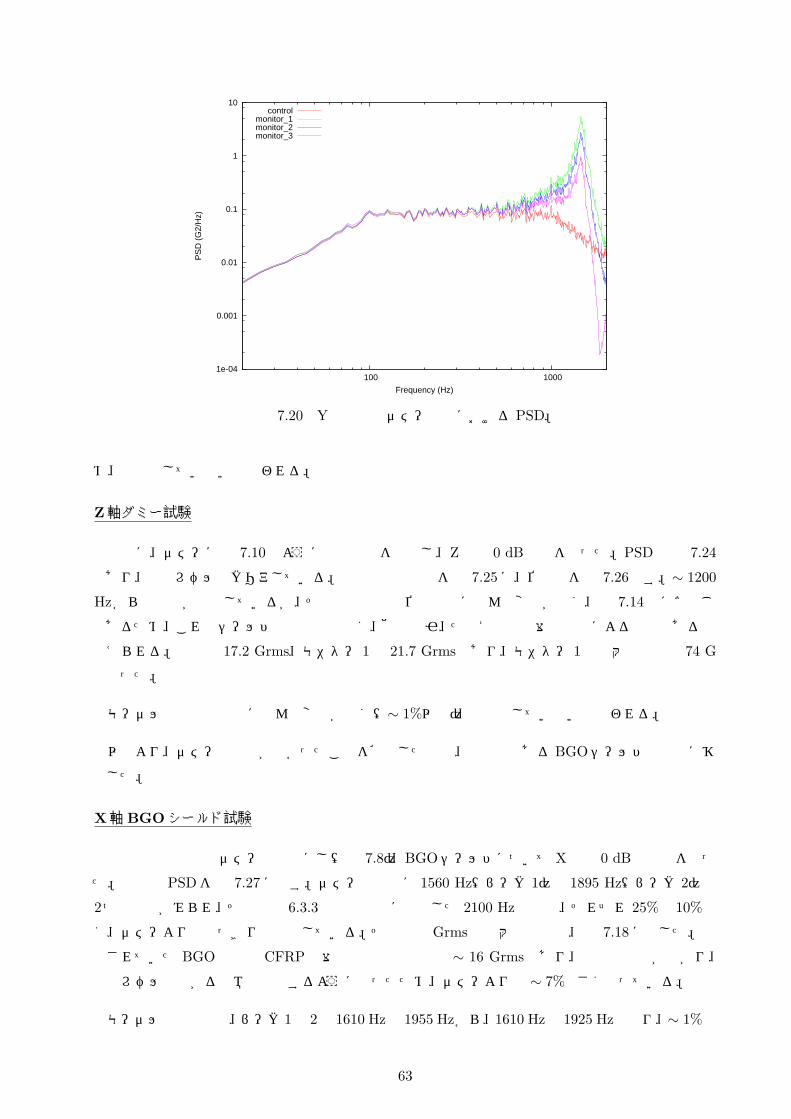
Y軸ダミー試験
同様に、ダミーに図 7.9のように加速度計を配置し、Y軸の 0 dB加振を行った。PSDは図 7.20
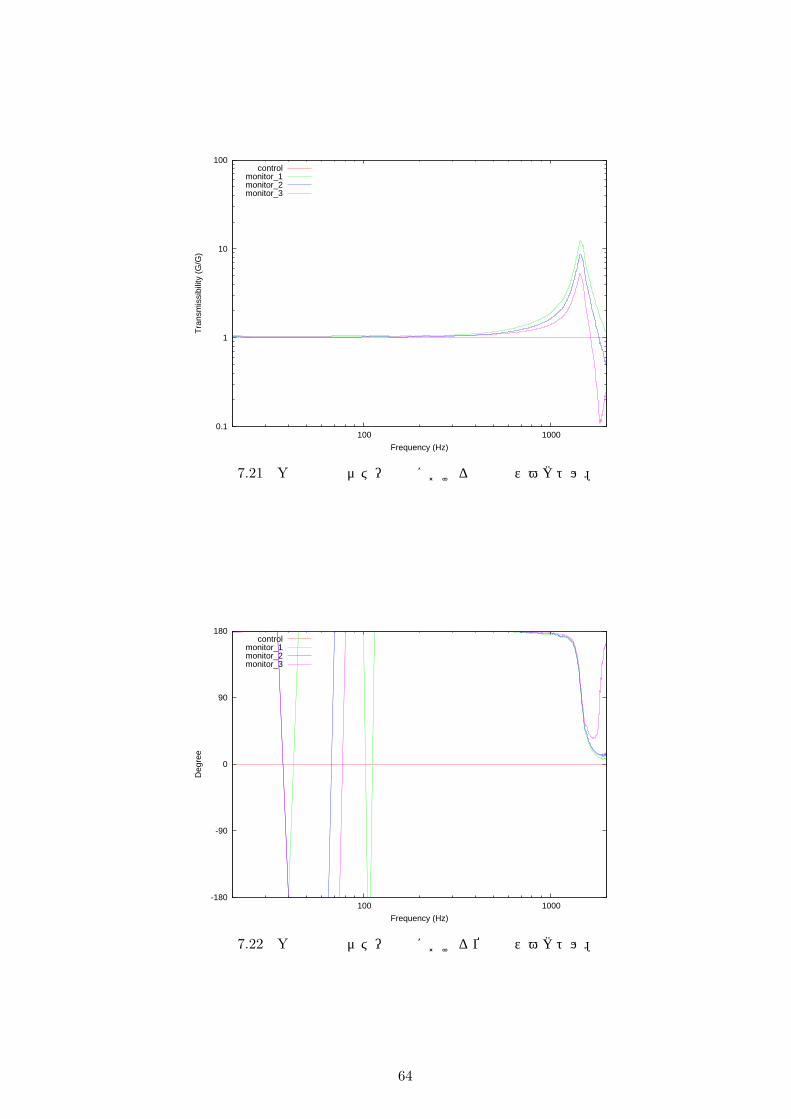
であり、振動レベルはクリアしている。そのときの加速度の伝達率を図 7.21に、位相差を図 7.22示
す。ここでは 1465 Hz(ピーク 1)のピーク 1つがあり、位相差が 90◦付近となっているため、シー
ルドの共振である。X軸と同じく、共振周波数の値は近似値の∼ 20%であった。その際のGrmsと最
大加速度を、図 7.23に示す。GrmsはX軸のものとほぼ変化は無い(∼ 2%)。
モーダル試験の結果、共振ピークは 1560 Hzから 1530 Hzと∼ 2%下がり、大きな変化ではないた
60
0.1
1
10
100
100 1000
Tra
nsm
issi
bilit
y (G
/G)
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.16 X軸方向のダミー試験における伝達率スペクトル。
-180
-90
0
90
180
100 1000
Deg
ree
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.17 X軸方向のダミー試験における位相差スペクトル。
61
0
20
40
60
80
100
120
0 5 10 15 20 25 30 35 40 45
G
Height (mm)
Grms_brass_xGrms_bgo_x
Max_G_brass_xMax_G_bgo_x
図 7.18 X軸加振時の、モニター位置による加振の変化。ダミー(真鍮)と BGOに対して、Grms
と最大加速度を示している。横軸は治具からの距離、縦軸は加速度(G=9.8 m/s2)を表す。
0.1
1
10
100
100 1000
Tra
nsm
issi
bilit
y (G
/G)
Frequency (Hz)
controlmonitor_1 (before 0 dB)
monitor_1 (after 0 dB)
図 7.19 X軸方向のダミー試験における 0 dB試験前後の伝達率スペクトル(-21 dB)の比較。
62
1e-04
0.001
0.01
0.1
1
10
100 1000
PS
D (
G2/
Hz)
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.20 Y軸方向のダミー試験における PSD。
め、破損はしていないと思われる。
Z軸ダミー試験
最後に、ダミーに図 7.10のように加速度計を配置し、Z軸の 0 dB加振を行った。PSDは図 7.24
であり、振動レベルはクリアしている。加速度の伝達率を図 7.25に、位相差を図 7.26示す。∼ 1200
Hzから伝達率が増加しているが、その周波数での位相差はほとんど変化がなく、図 7.14とほぼ同じ
であるため、これはシールドの共振ではなく、他の原因、たとえば加振台の共振によるものであると
考えられる。入力は 17.2 Grms、モニター 1は 21.7 Grmsであり、モニター 1の最大加速度は 74 G
となった。
モーダル試験の結果はほとんど変化がなく(∼ 1%以下)、破損はしていないと思われる。
以上より、ダミーで破損が無かったことを確認したので、本試験であるBGOシールドの加振に移
行した。
X軸BGOシールド試験
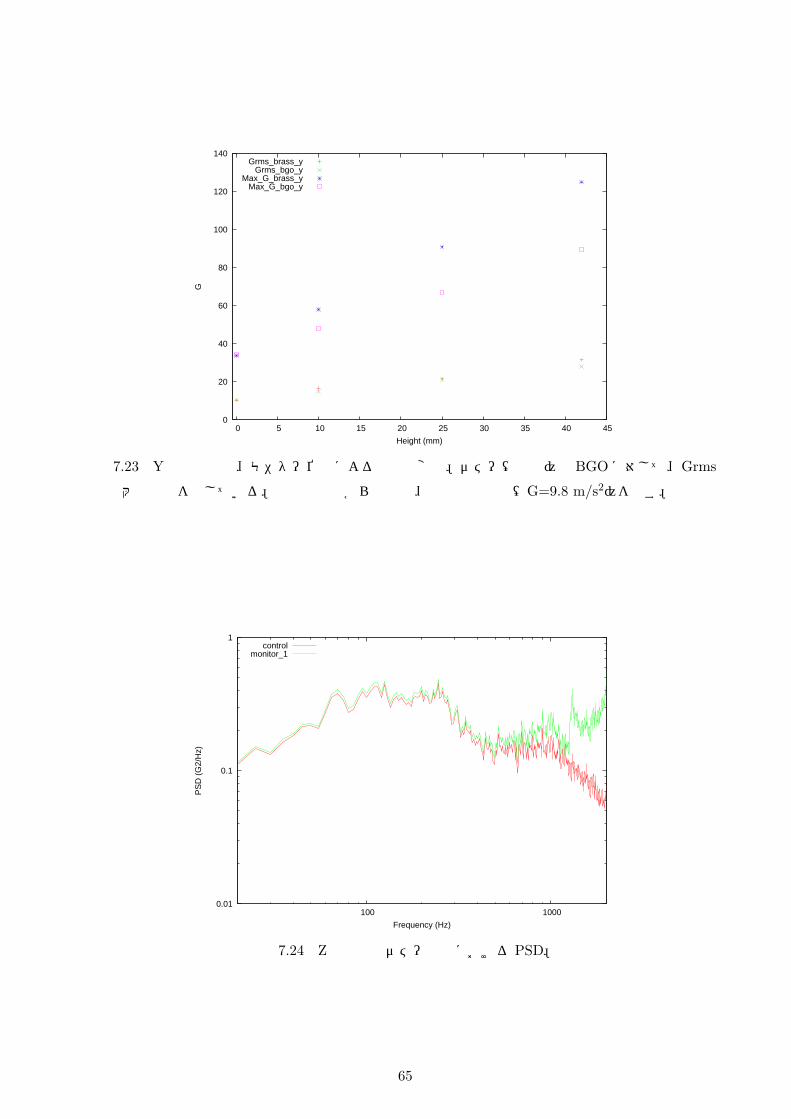
加速度計の配置はダミーと同様にし(図 7.8)、BGOシールドについてX軸の 0 dBの加振を行っ
た。結果の PSDを図 7.27に示す。ダミーと同様に 1560 Hz(ピーク 1)と 1895 Hz(ピーク 2)の
2つの共振がみられ、その値は 6.3.3項で近似的に計算した 2100 Hzと比べ、それぞれ 25%と 10%低
く、ダミーよりもはっきりと分離している。その際の Grmsと最大加速度は、図 7.18に示した。懸
念されていた BGO結晶と CFRP土台の境界面の加振は ∼ 16 Grmsであり、共振周波数が上がり、
振動レベルの下がる領域で共振するようになったため、ダミーよりも∼ 7%小さくなっている。
モーダル試験の結果、ピーク1と 2は 1610 Hzと 1955 Hzから、1610 Hzと 1925 Hzとなり、∼ 1%の
63
0.1
1
10
100
100 1000
Tra
nsm
issi
bilit
y (G
/G)
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.21 Y軸方向のダミー試験における伝達率スペクトル。
-180
-90
0
90
180
100 1000
Deg
ree
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.22 Y軸方向のダミー試験における位相差スペクトル。
64
0
20
40
60
80
100
120
140
0 5 10 15 20 25 30 35 40 45
G
Height (mm)
Grms_brass_yGrms_bgo_y
Max_G_brass_yMax_G_bgo_y
図 7.23 Y軸加振時の、モニター位置による加振の変化。ダミー(真鍮)と BGOに対して、Grms
と最大加速度を示している。横軸は治具からの距離、縦軸は加速度(G=9.8 m/s2)を表す。
0.01
0.1
1
100 1000
PS
D (
G2/
Hz)
Frequency (Hz)
controlmonitor_1
図 7.24 Z軸方向のダミー試験における PSD。
65
0.1
1
10
100 1000
Tra
nsm
issi
bilit
y (G
/G)
Frequency (Hz)
controlmonitor_1
図 7.25 Z軸方向のダミー試験における伝達率スペクトル。
-180
-90
0
90
180
100 1000
Deg
ree
Frequency (Hz)
controlmonitor_1
図 7.26 Z軸方向のダミー試験における位相差スペクトル。
66
0.001
0.01
0.1
1
10
100 1000
PS
D (
G2/
Hz)
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.27 X軸方向の BGOシールド試験における PSD。
減少であるため、破損は無かったと考えられる。目視からも傷は見付からなかった。
Y軸BGOシールド試験
同様に、BGOシールドについて Y軸の 0 dBの加振を行った。結果の PSDを図 7.28に示す。こ
こでは、ダミーが 1465 Hzの 1つの共振であったのに対し、1595 Hz(ピーク 1)と 1880 Hz(ピー
ク 2)と 2つに分かれた共振がみられた。その際のGrmsと最大加速度は、図 7.23に示したが、X軸
の振動とあまり変化は無い。
モーダル試験の結果、ピーク 1と 2は 1665Hzと 1910 Hzから、1645 Hzと 1905 Hzになり、∼ 1%の
減少であるため、破損は無かったと考えられる。目視からも傷は見付からなかった。
Z軸BGOシールド試験
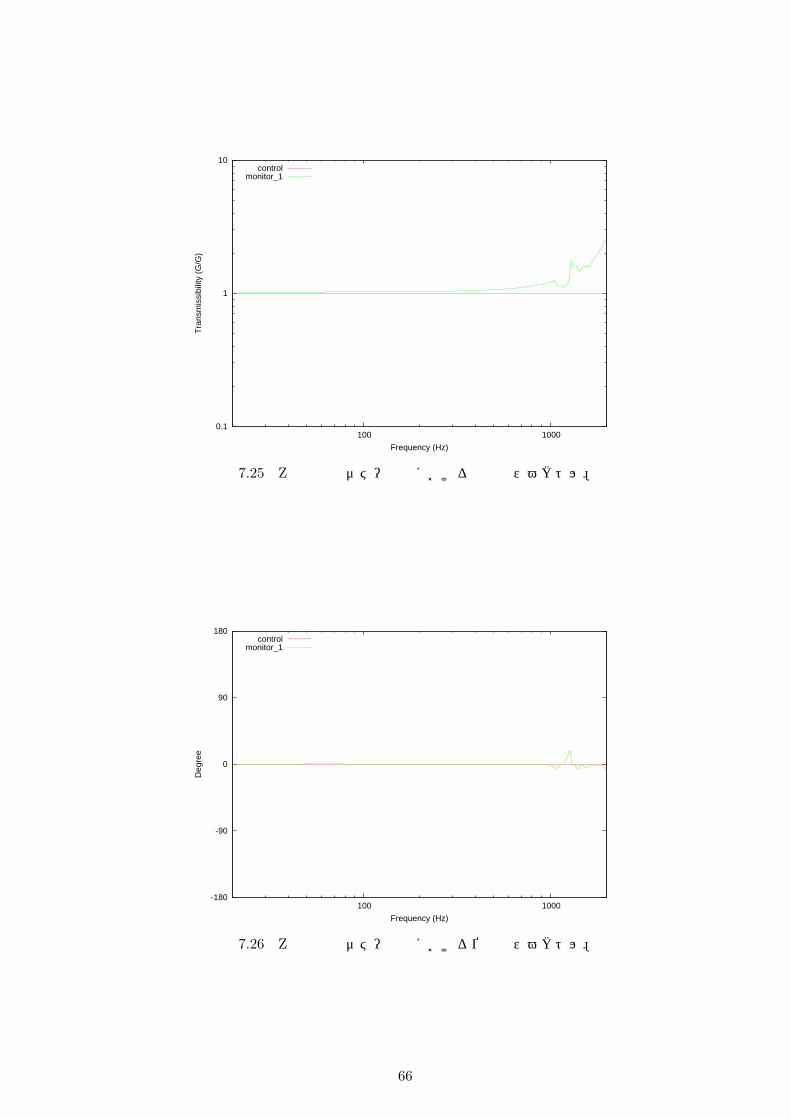
最後に、BGOシールドについて Z軸の 0 dBの加振を行った。ダミーと同様に共振はなく、加振
の入力 17.1 Grmsに対し、ダミーとほぼ同様に、モニター 1は 21.2 Grmsであり、最大加速度は 73
Gであった。
モーダル試験の結果はほとんど変化がなく(∼ 1%以下)、目視により傷も発見されなかったため、
シールドが振動試験に耐えることが実証された。
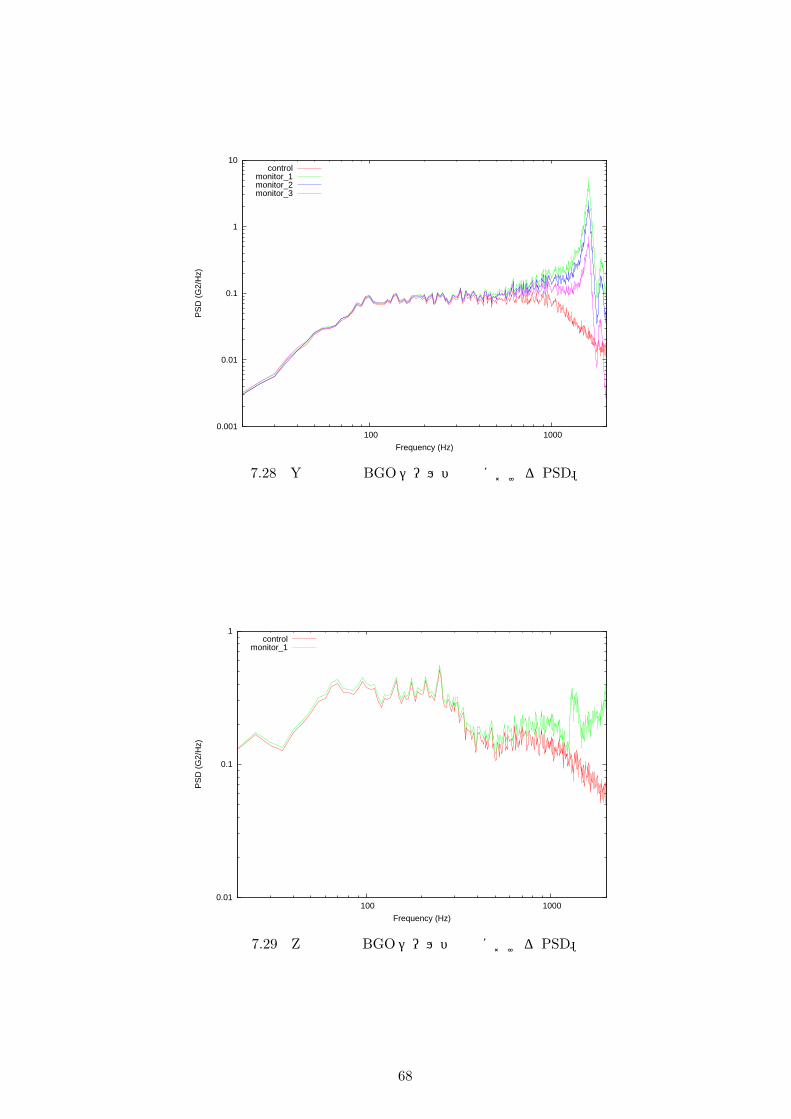
7.3.4 共振特性の解析
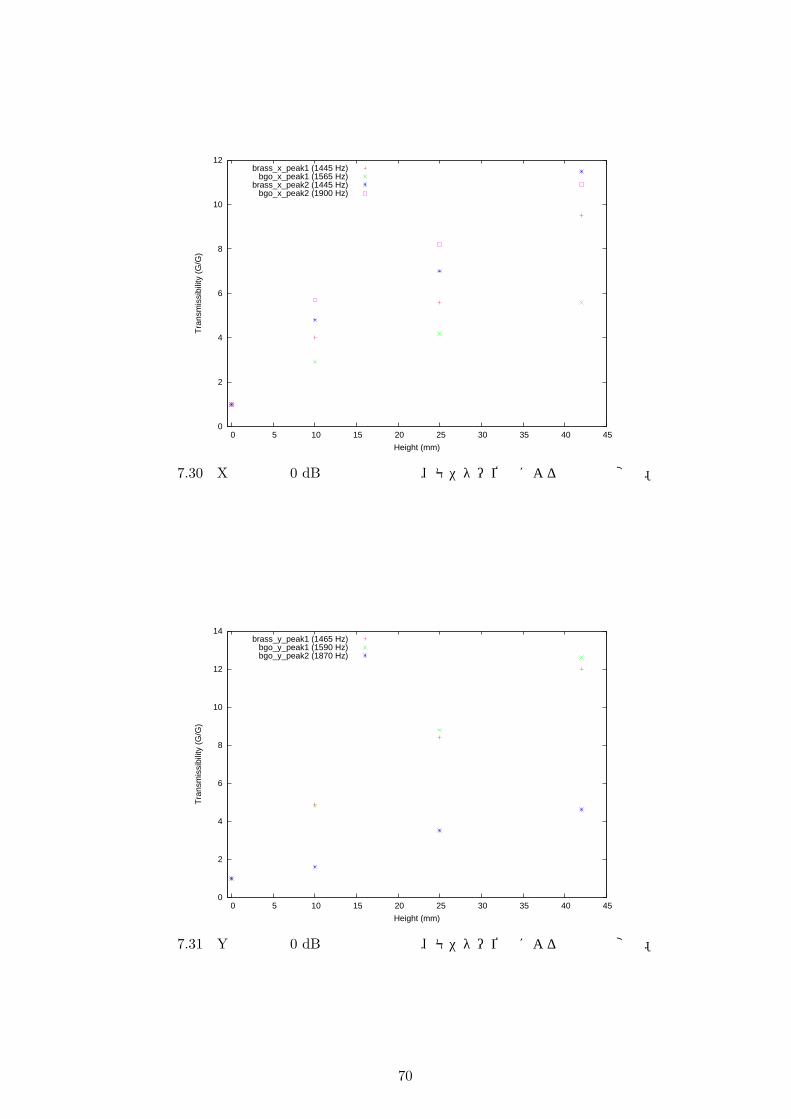
振動試験の結果より、XおよびY軸の加振に対して、予想していた 1つの共振だけでなく、2つの
ピークをもつ共振モードが存在することがわかった。X軸方向の 0 dB試験の共振での、モニター位
67
0.001
0.01
0.1
1
10
100 1000
PS
D (
G2/
Hz)
Frequency (Hz)
controlmonitor_1monitor_2monitor_3
図 7.28 Y軸方向の BGOシールド試験における PSD。
0.01
0.1
1
100 1000
PS
D (
G2/
Hz)
Frequency (Hz)
controlmonitor_1
図 7.29 Z軸方向の BGOシールド試験における PSD。
68
置による伝達率の変化を図 7.30に示すと、CFRPの土台まで(∼ 7 mm)の先のBGO結晶からの部
分でも、土台までと異なる傾きで伝達率が増えている。土台のずれのみの振動だとBGO結晶は並進
運動となり(図 6.7a)、伝達率は等しくなるはずなので、ここでは、さらに結晶の回転運動も起こっ
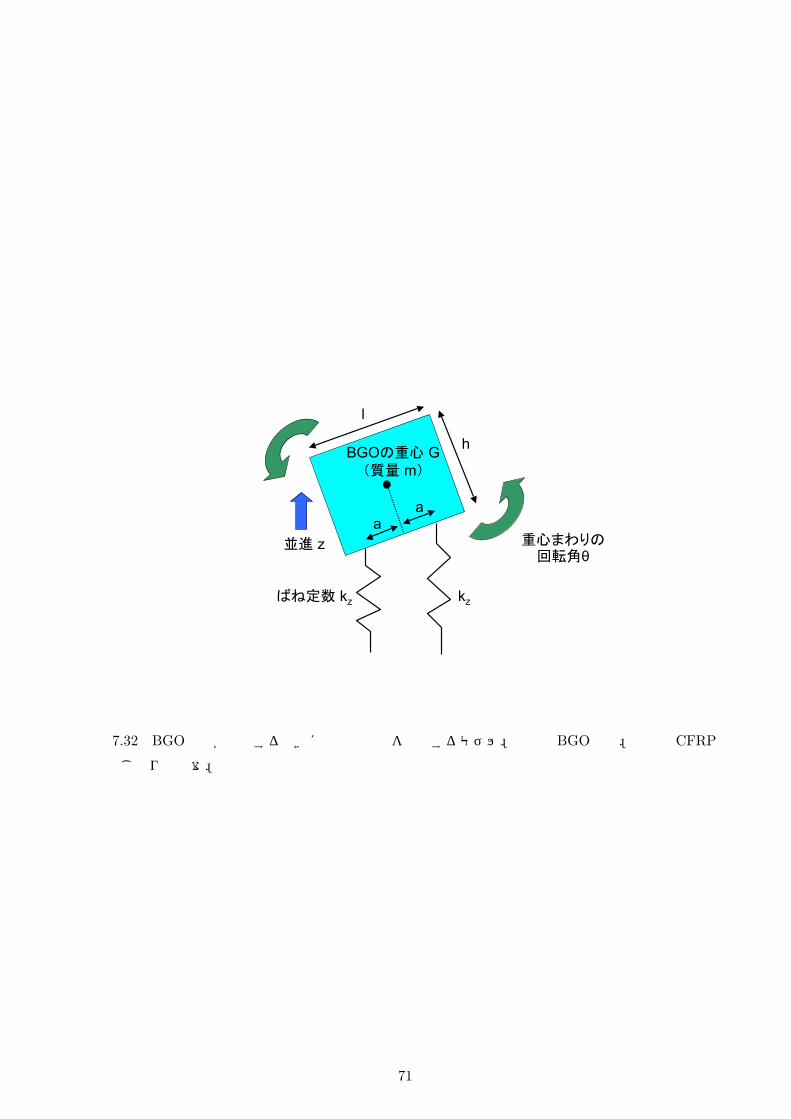
ていると考えられる。
回転運動のモデルを図 7.32のように考える。BGO結晶(幅 l、高さ h)の重心より底面におろし
た垂線から a平行移動した場所に、ばね定数 kzの 2つのばねが付いていると仮定する。このばね 1
つは、ねじ穴まわりのブロック 2つ分に相当する(図 6.9b参照)。BGO結晶の重さをm、慣性モー
メントを I、Z軸方向への並進距離を z、重心まわりの回転角を θとすると、運動方程式は、
mz̈ = −kz(z − lθ/2) − kz(z + lθ/2) (7.4)
Iθ̈ = kzl(z − lθ/2) − kzl(z + lθ/2) (7.5)
となる。この方程式を解いて共振周波数 ft、frを求めると、
ft =√
2k/m (7.6)
fr =√
2ka2/I (7.7)
となる。ftは並進の共振周波数で6.3.3項で考えたfzものと同じであり、frは並進の共振周波数である。
ばね定数は kz = ES/l(6.3.3項)で与えられ(E = 4 GPa)、6.4節の設計よりS = 16×17×2 mm2、
l = 6 mmだから、kz = 1.8 × 108 N/mとなる。直方体の慣性モーメント I = m(l2+h2)12 = 6.2 × 10−4
と、BGO底面の中心からCFRPまわりへの距離 a = 16.3 mmを(7.5)式に代入すると、fr ' 2700
Hzである。これは、6.3.3項で計算した fXY ' 2300 Hzの 1.2倍程度となり近いため、X軸およびY
軸の並進と、この回転モードとがカップルする可能性がある。実際、BGOのピーク 1を 1.2倍する
とピーク 2の値に数%の誤差で一致している(図 7.27、図 7.27参照)。
図 7.15、図 7.20をみると、X軸振動時のダミーではピーク 1と 2は 9%としか離れておらず、Y軸
振動時にはほとんどピークは重なっている。これは、CFRP土台製作の再現性の問題であると思われ
る。ダミーの土台は 31.5 g、BGOシールドの土台は 31.8 gで、BGOシールドの土台の方が 0.3 g重
かった。このほとんどは土台部品を貼り付ける接着剤の量によるものであり(図 6.8)、CFRP周り
の面積が数 mm大小することもあり得る。たとえば、(7.5)式で aを 2 mm減らすと fr ' 2300 Hz
となり、fXYとほぼ一致するため、図 7.20のピークの重なりを説明することができる。
69
0
2
4
6
8
10
12
0 5 10 15 20 25 30 35 40 45
Tra
nsm
issi
bilit
y (G
/G)
Height (mm)
brass_x_peak1 (1445 Hz)bgo_x_peak1 (1565 Hz)
brass_x_peak2 (1445 Hz)bgo_x_peak2 (1900 Hz)
図 7.30 X軸方向の 0 dB試験の共振での、モニター位置による伝達率の変化。
0
2
4
6
8
10
12
14
0 5 10 15 20 25 30 35 40 45
Tra
nsm
issi
bilit
y (G
/G)
Height (mm)
brass_y_peak1 (1465 Hz)bgo_y_peak1 (1590 Hz)bgo_y_peak2 (1870 Hz)
図 7.31 Y軸方向の 0 dB試験の共振での、モニター位置による伝達率の変化。
70
!
kz
kz
l
hBGO G
m
z a
a
図 7.32 BGO結晶が回転するときに共振周波数を推定するモデル。水色はBGO結晶。ばねはCFRP
のねじ周りの土台。
71
8 今後の展望
8.1 熱応力の低減
8.1.1 CFRPとGFRPの複合材
5.4節で述べたように、CFRPは熱膨張率が BGO結晶に比べて 1/3ほどであるため(CFRPが
2.4× 10−6 K−1、BGO結晶が 7.2× 10−6 K−1)、そのインターフェイスでは温度変化による熱応力が
集中しやすい。CFRPと BGO結晶の間の反射材がもっとも構造的に弱い部分なので(6.4節参照)、
それを避けるためにはヤング率が低い弾性接着剤を用いて応力を逃すのが一般的だが、弾性接着剤は
アウトガスが発生しやすく(∼ 5%)、宇宙使用には適さない。
そこで、CFRPに熱膨張率の高いGFRP(∼ 8× 10−6 K−1)の層を混ぜることで、その値をBGO
結晶に近づけることを検討する。GFRPとしては、ヤング率(∼ 10 GPa)や強度(∼ 240 MPa)が
高く、耐熱性もあり、航空機用としてよく用いられる S-2ガラスを使用する。GFRPは CFRPより
も強度が劣るが、CFRP構造体の強度にはまだ余裕があるため(6.4節参照)、その何層かを入れ替え
ても強度的に問題となることはないと思われる。密度は ∼ 1.8 g/cm3であり、CFRP(1.52 g/cm3)
の 1.2倍程度となる。その試験片の製造元が行った機械特性の測定結果として、図 8.1、図 8.2、図
8.3に、GFRPの割合を変えたときの複合材の熱膨張率、ヤング率、強度変化を示す。熱膨張率は荷
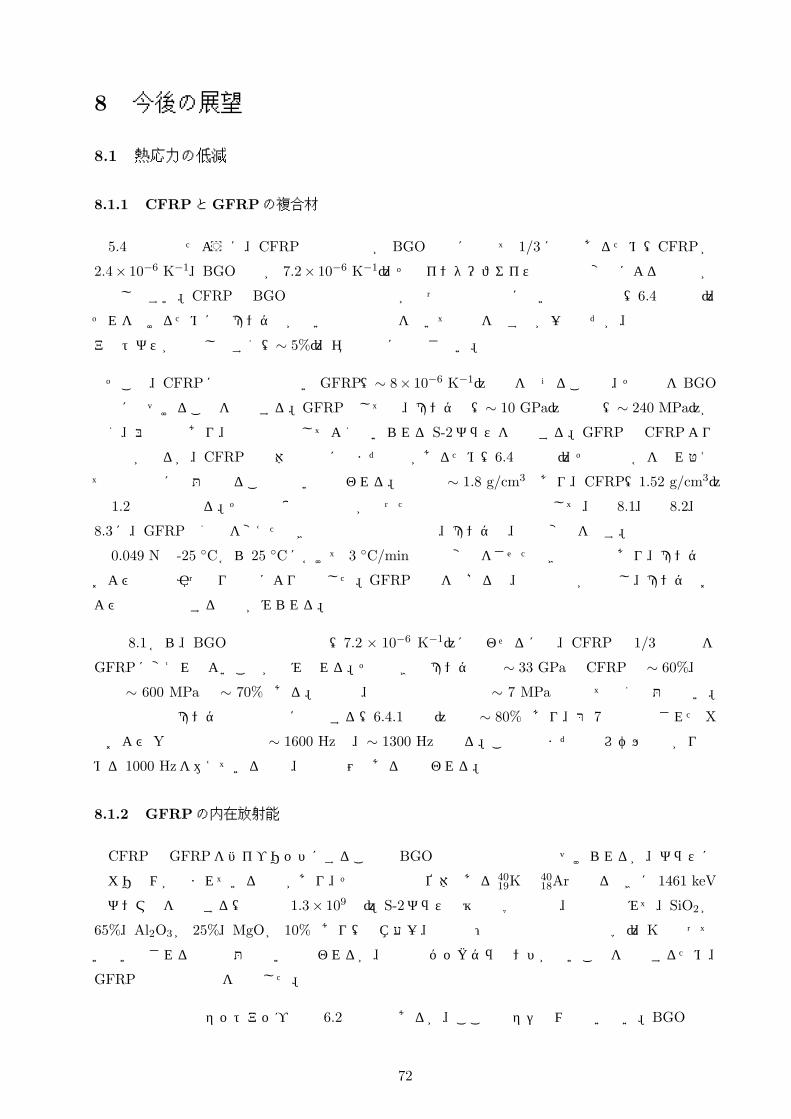
重 0.049 Nで-25 ◦Cから 25 ◦Cにかけて 3 ◦C/minで温度変化をさせたときの測定であり、ヤング率
および強度は引っ張り試験により測定した。GFRP比率を上げると、熱膨張率が増加し、ヤング率お
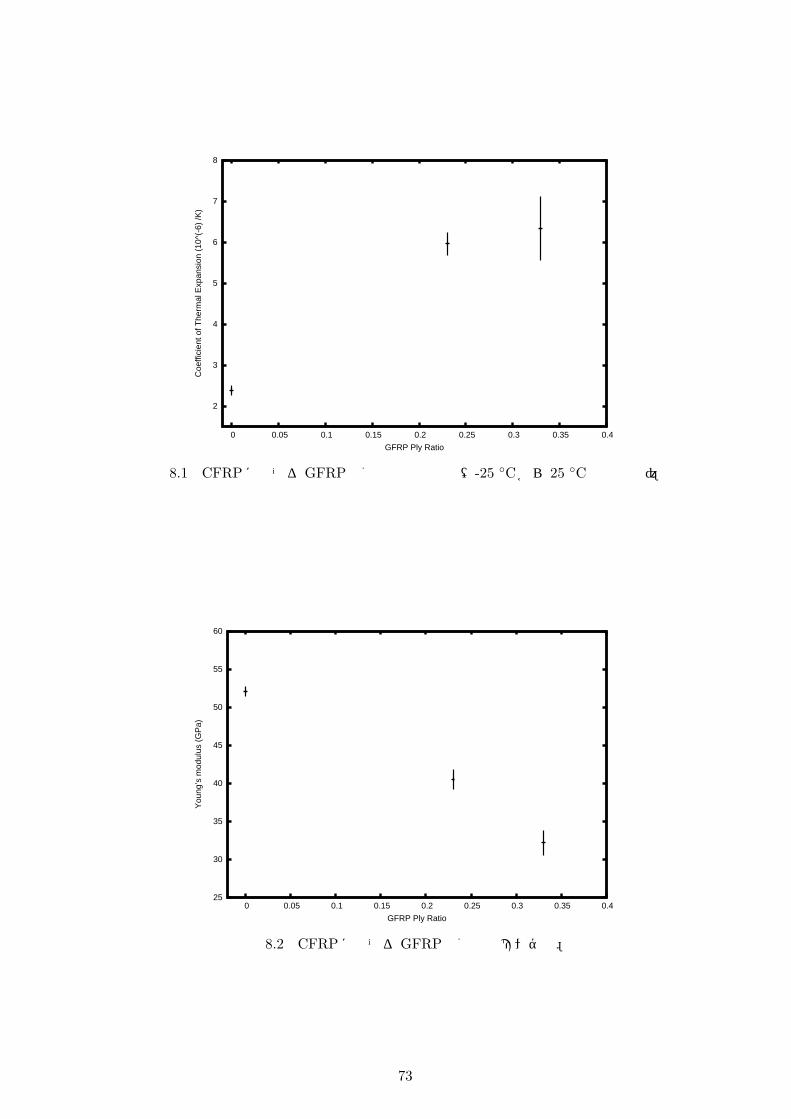
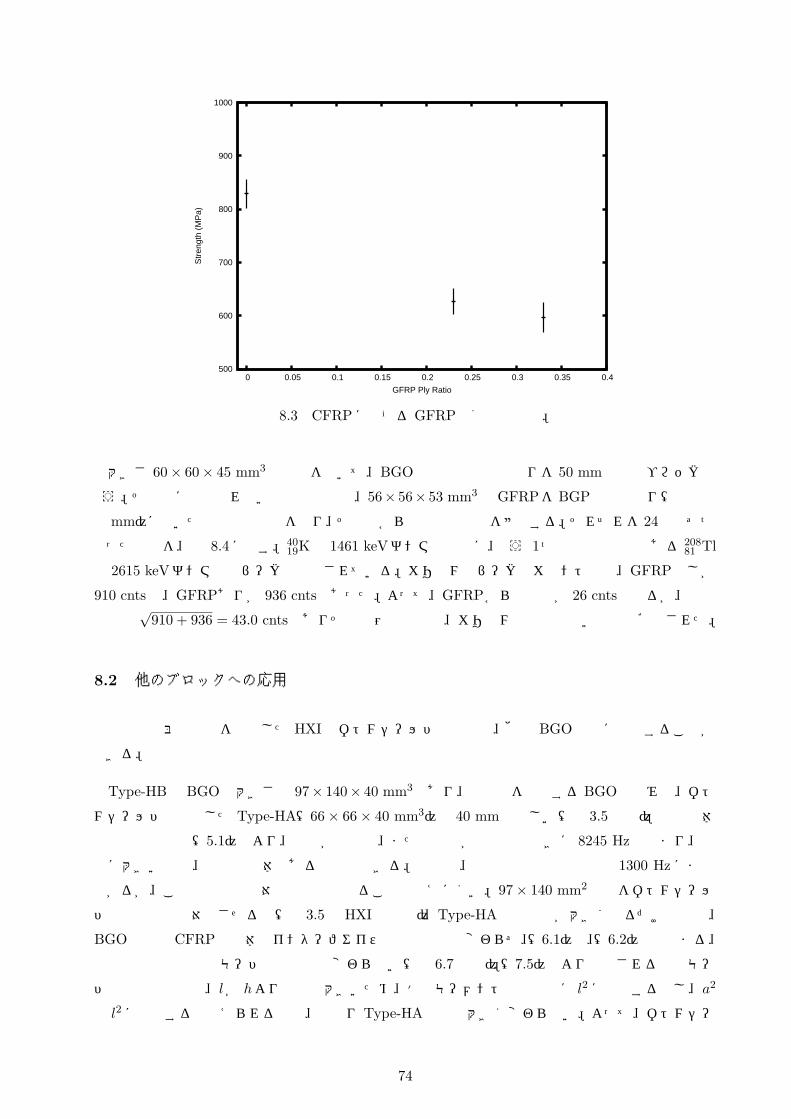
よび強度は減少する傾向がみられる。
図 8.1から、BGO結晶の熱膨張率(7.2 × 10−6 K−1)に合わせるには、CFRPの 1/3強の層を
GFRPに変えればよいことが読み取れる。そのときのヤング率は∼ 33 GPaとCFRPの∼ 60%、強
度は ∼ 600 MPaと ∼ 70%である。強度は、応力集中の予測値 ∼ 7 MPaと比べて全く問題は無い。
共振周波数はヤング率の平方根に比例する(6.4.1参照)ので∼ 80%であり、第 7章で測定されたX
軸および Y軸の共振周波数∼ 1600 Hzは、∼ 1300 Hzとなる。この値はまだ振動レベルの下がり始
める 1000 Hzを越えているので、許容範囲であると思われる。
8.1.2 GFRPの内在放射能
CFRPとGFRPをハイブリッドにすることで BGO結晶と熱膨張率は近づけられるが、ガラスに
はカリウムが含まれているものがあり、その放射性同位体である 4019Kは
4018Arとなるときに 1461 keV
のガンマ線を放出する(半減期 1.3× 109年)。S-2ガラス繊維の化学成分は、重量比でみて、SiO2が
65%、Al2O3が 25%、MgOが 10%であり(藤井太一、座古勝:複合材料の破壊と力学)、Kは入って
いないとされるので問題は無いと思われるが、今回はバックグラウンドが無いことを実証するため、
GFRPの内在放射能を測定した。
放射線検出器のセットアップは図 6.2と同様であるが、ここではセシウムは用いない。BGO結晶
72
2
3
4
5
6
7
8
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Coe
ffici
ent o
f The
rmal
Exp
ansi
on (
10^(
-6)
/K)
GFRP Ply Ratio
図 8.1 CFRPに混ぜるGFRPの割合と熱膨張率(-25 ◦Cから 25 ◦Cの平均値)。
25
30
35
40
45
50
55
60
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
You
ng’s
mod
ulus
(G
Pa)
GFRP Ply Ratio
図 8.2 CFRPに混ぜるGFRPの割合とヤング率。
73
500
600
700
800
900
1000
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Str
engt
h (M
Pa)
GFRP Ply Ratio
図 8.3 CFRPに混ぜるGFRPの割合と強度。
は大きさ 60× 60× 45 mm3のものを用いて、BGO結晶と検出器の周りを 50 mm厚の鉛ブロックで
覆う。その中に何も入れない時の放射能と、56× 56× 53 mm3のGFRPをBGP結晶の隣り(隙間は
数mm)に置いた場合の放射能を測り、その差から放射能の有無を感知する。それぞれを 24時間ずつ
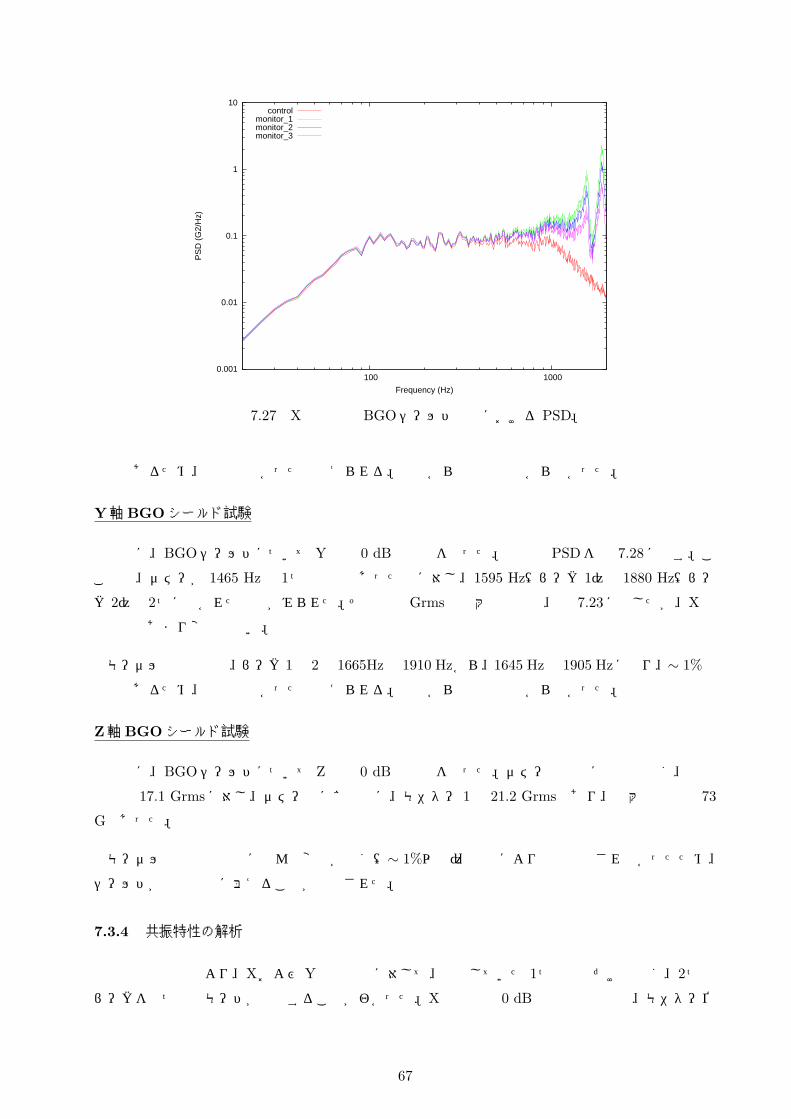
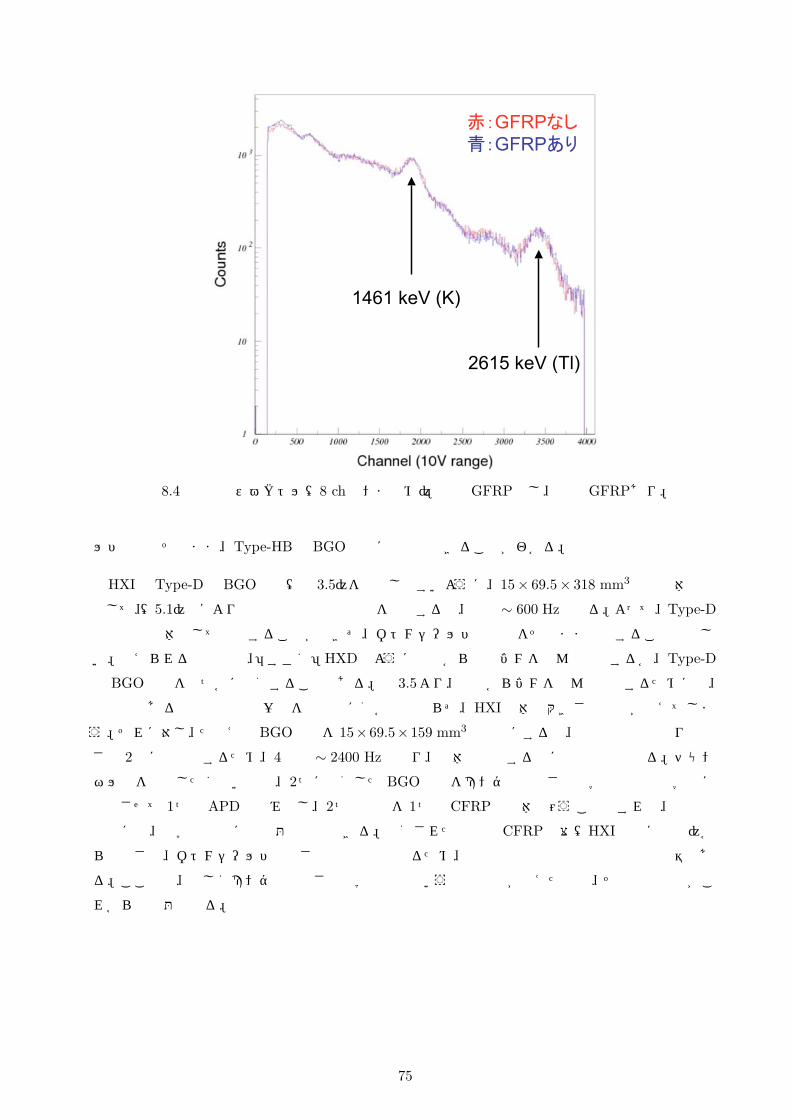
測った結果を、図 8.4に示す。4019Kの 1461 keVガンマ線と共に、もう 1つの自然放射能である 208
81 Tl
の 2615 keVガンマ線のピークも検出されている。カリウムのピークのカウント数は、GFRPなしが
910 cntsで、GFRPありが 936 cntsであった。よって、GFRPからの寄与が 26 cntsとなるが、統計
誤差は√
910 + 936 = 43.0 cntsでありその範囲内なので、カリウムの混入は無いものと確認された。
8.2 他のブロックへの応用
本論文で耐振設計を実証した HXIのボトムシールドの機構は、他の BGO結晶に応用することが
できる。
Type-HBのBGOの大きさは 97× 140× 40 mm3であり、撮像部を保護するBGOの厚みは、ボト
ムシールドで保護した Type-HA(66 × 66 × 40 mm3)の 40 mmと等しい(図 3.5参照)。結晶自体
の共振周波数は(5.1)式より、両端が固定端、または両端が自由端のときに 8245 Hzと求まり、十
分に大きいので、結晶は剛体であると仮定できる。固定端、自由端の支持の場合は 1300 Hzにまで
下がるが、この機構では非対称の支持となることは考えにくい。97 × 140 mm2の面をボトムシール
ド機構の底面と対応させると(図 3.5のHXI側面側)、Type-HAの底面積が大きくなるだけなので、
BGO結晶とCFRP構造体のインターフェイスの応力集中は変わらず、(6.1)式、(6.2)式で決まる、
振動時の結晶の並進モードの周波数も変わらない(図 6.7参照)。(7.5)式より計算される回転モー
ドの共振周波数は、lが hよりも数倍大きいため、慣性モーメントは近似的に l2に比例するとし、a2
も l2に比例すると考えられるので、やはりType-HAの値と大きく変わらない。よって、ボトムシー
74
1461 keV (K)
2615 keV (Tl)
!"GFRP#$
%"GFRP&'
図 8.4 放射能スペクトル(8 chビンまとめ)。赤はGFRPなし、青はGFRPあり。
ルド機構はそのまま、Type-HBの BGO結晶にも適用できることがわかる。
HXIのType-DのBGO結晶(図 3.5)を計算しやすいように、15× 69.5× 318 mm3の直方体と近
似して、(5.1)式により結晶自身の共振周波数を計算すると、値は∼ 600 Hzとなる。よって、Type-D
の結晶は剛体として仮定することができず、ボトムシールドの機構をそのまま適用することは難し
い。考えられる解決策は、「すざく」HXDのように上下から防振ゴムを挟んで固定するか、Type-D
のBGO結晶を幾つかに分割することである。図 3.5より、上下からゴムを挟んで固定するためには、
撮像部のある内部の空間の一部を補強用に割かねばならず、HXI全体の大きさや重量が増えてしま
う。それに対し、たとえばBGO結晶を 15×69.5×159 mm3と半分にすると、共振周波数ははりの長
さの 2乗に反比例するため、4倍の∼ 2400 Hzとなり、剛体と仮定するのに十分な値となる。チャン
ネル数を増やしたくないので、2つに分割した BGO結晶をヤング率の小さな光学接着剤で光学的に
結合させて 1つのAPDで読み出し、2つの結晶を 1つのCFRP構造体で囲うこととすれば、機械構
造的にも、光学構造的にも問題は解決できる。分割された結晶の CFRP土台(HXI側面に配置)か
らの高さは、ボトムシールドの高さの半分程度となるため、応力集中や共振周波数の設計も容易であ
る。ここでは、新しくヤング率の小さな光学接着剤という構成要素が増えたので、その強度試験がこ
れからの課題となる。
75
9 まとめ
本論文では、ASTRO-Hに搭載する、硬X線撮像検出器HXIおよび軟ガンマ線検出器 SGDをバッ
クグラウンドから護るための、結晶シンチレータに基づく、アクティブシールド機構の基本設計を
行った。以下に具体的な達成事項を述べる。
(1)「すざく」HXDでの一体型シールドの短所を検討し、分割型シールド機構を考案した。
(2)分割型シールドの欠点である結晶間の隙間を最小化する(∼ 4 mm)ために不可欠な、ねじ止
め機構によるモジュール化の基本概念を考案した。
(3)66×66×40 mm3のBGO結晶を、20–2000 Hzの周波数領域で、X軸およびY軸は 10.4 Grms、
Z軸は 17.0 Grmsのランダム振動に対して保護する(強度や共振周波数の条件を満たす)よう
に、HXIボトムシールドの設計を行った。
(4)とくに、接着強度を考慮した反射材と接着剤の選定、CFRP構造体とねじのインターフェイス
の強度計算、BGO結晶と CFRP構造体のインターフェイスの強度計算、シールドの共振周波
数の計算に基づき、設計する CFRP構造体のパラメータを決定した。
(5)設計に基いてボトムシールドの製作を行い、振動試験によりその強度を実証した。
(6)ボトムシールドで確立した機構を、他のシールドに応用する道しるべを示した。
本論文は、以上である。
76
参考文献1) T. Takahashi et al., 2008
2) M. Kokubun et al., 2008
3) J. Kataoka et al., 2005
4) Y. Fukazawa et al., 2005
5) S. Watanabe et al., 2007
6) H. Tajima et al., 2005
7) 中澤 1998
8) 藤田勝久:振動工学
9) 小久保邦雄、後藤芳樹、森孝男、立野昌義:材料力学
10) 藤井太一、座古勝:複合材料の破壊と力学
77
付 図
2.1 ASTRO-H衛星の全体図。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 ASTRO-Hに搭載される観測機器の配置。 . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 H-IIAロケットの概観。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4 「すざく」のXISおよびHXDにより得られた、Her X-1のディップ時と非ディップ時のスペクトル比。赤と青の線はそれぞれ、水素柱密度∼ 7 × 1022 cm−2の吸収体が完全電離していた場合と中性であった場合の予想を示す。 . . . . . . . . . . . . . . . . . 10
3.1 HXIのシステム構成。同型の 2系統のうち 1系統のみを示す。 . . . . . . . . . . . . . 13
3.2 HXIおよび SGDで予測される有効面積。 . . . . . . . . . . . . . . . . . . . . . . . . 13
3.3 HXIおよび SGDの有効面積あたりのバックグラウンド予測スペクトル。 . . . . . . . 14
3.4 HXIと SGDの期待される感度。「すざく」HXDおよび INTEGRAL衛星 IBIS装置のものも、あわせて示す。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.5 HXI-Sの 1台の構造。水色は BGOシールド、黒は撮像部、緑色はシールド部用と撮像部用の前段回路部を示す。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.6 HXI-Sの撮像部。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.7 Siと CdTeの検出効率。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.1 SGDのシステム構成。2系統をまとめて示す。 . . . . . . . . . . . . . . . . . . . . . 19
4.2 SGD-Sの 1台の構造。検出部、ファインコリメータ、BGOシールド(水色)、前置回路部(緑)、CFRP構造体を示す。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3 SGD-Sの検出部。水色はBGO結晶、赤色は Siパッド検出器、紫色はCdTeパッド検出器を示す。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.1 「すざく」HXDの構造。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5.2 「すざく」HXDのアクティブシールドの支持方法。 . . . . . . . . . . . . . . . . . . 25
5.3 ねじ止めができるアクティブシールドのモジュールの概念図。 . . . . . . . . . . . . . 29
5.4 アクティブシールドのランダム振動試験に用いる、コンポーネント試験レベル(0 dB)。緑はX軸およびY軸方向、赤は Z軸方向の加振を示す。横軸は周波数、縦軸は周波数あたりの振動パワー。XY軸は 10.4 Grms、Z軸は 17.0 Grms。 . . . . . . . . . . . . 30
5.5 アクティブシールドのパイロ衝撃試験に用いる、コンポーネント試験レベル(0 dB)。横軸は周波数、縦軸は衝撃に対する最大応答加速度。 . . . . . . . . . . . . . . . . . . 30
6.1 ボトムシールドで保護する BGO結晶。 . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6.2 光量測定の実験装置。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6.3 BGO結晶の 5面が裸のまま(赤)、ESRで覆った場合(青)、BaSO4を塗布した場合(緑)の 137Csのパルスハイトスペクトル。662 keVのピークはそれぞれ、842.3± 1.1ch、1178.3 ± 1.4 ch、1397.2 ± 1.4 ch。 . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.4 接着強度試験の概略図。(a)はBaSO4とバインダーの混合液の場合、(b)は ESRの場合。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.5 BaSO4とバインダーの混合液を塗布した BGO結晶。 . . . . . . . . . . . . . . . . . . 36
6.6 Z軸または横方向(X軸、Y軸)の振動時における、ねじ穴まわりの応力の分布。4本のねじの 1本を示す。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
i
6.7 横方向(X軸、Y軸)および Z軸方向の共振周波数を推定するさいのモデル。CFRPの底面はねじにより固定されている。 . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.8 土台の作成図。作成の様子を(a)は上から、(b)は下から見た様子。 . . . . . . . . 40
6.9 土台の完成図。(a)は土台の外観を、(b)は内部の隠線を表示したもの。 . . . . . . . 41
6.10 ボトムシールド完成までの組み上げ手順。(a)BGO結晶と土台を接着し、(b)Lアングルと側板を接着する。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.11 ボトムシールド完成写真。(a)は土台を下に、(b)は土台を上にして撮影したもの。 42
6.12 X軸に 100 Gの静荷重を与えたときの応力。 . . . . . . . . . . . . . . . . . . . . . . . 44
6.13 Y軸に 100 Gの静荷重を与えたときの応力。 . . . . . . . . . . . . . . . . . . . . . . . 45
6.14 Z軸に 100 Gの静荷重を与えたときの応力。 . . . . . . . . . . . . . . . . . . . . . . . 46
7.1 中型加振機 i240の概観。テーブルに治具(159 × 159 × 19 mm3)が乗っている。 . . 48
7.2 治具の概観。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7.3 治具のはり近似。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
7.4 第 1回振動試験で破損したボトムシールド。(a)は試験後の状態、(b)は破断面の状態。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
7.5 側板が土台の下にはみ出している様子。 . . . . . . . . . . . . . . . . . . . . . . . . . 52
7.6 Y軸方向の治具試験で設置した加速度計(制御およびモニター)の位置。 . . . . . . . 55
7.7 Z軸方向の治具試験で設置した加速度計(制御およびモニター)の位置。 . . . . . . . 55
7.8 X軸方向のダミーおよびBGOシールド試験で設置した加速度計(制御およびモニター)の位置。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.9 Y軸方向のダミーおよびBGOシールド試験で設置した加速度計(制御およびモニター)の位置。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.10 Z軸方向のダミーおよびBGOシールド試験で設置した加速度計(制御およびモニター)の位置。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
7.11 X軸方向の治具試験における伝達率スペクトル。 . . . . . . . . . . . . . . . . . . . . 58
7.12 X軸方向の治具試験における位相差スペクトル。 . . . . . . . . . . . . . . . . . . . . 58
7.13 Z軸方向の治具試験における伝達率スペクトル。 . . . . . . . . . . . . . . . . . . . . . 59
7.14 Z軸方向の治具試験における位相差スペクトル。 . . . . . . . . . . . . . . . . . . . . . 59
7.15 X軸方向のダミー試験における PSD。 . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7.16 X軸方向のダミー試験における伝達率スペクトル。 . . . . . . . . . . . . . . . . . . . 61
7.17 X軸方向のダミー試験における位相差スペクトル。 . . . . . . . . . . . . . . . . . . . 61
7.18 X軸加振時の、モニター位置による加振の変化。ダミー(真鍮)と BGOに対して、Grmsと最大加速度を示している。横軸は治具からの距離、縦軸は加速度(G=9.8 m/s2)を表す。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.19 X軸方向のダミー試験における 0 dB試験前後の伝達率スペクトル(-21 dB)の比較。 62
7.20 Y軸方向のダミー試験における PSD。 . . . . . . . . . . . . . . . . . . . . . . . . . . 63
7.21 Y軸方向のダミー試験における伝達率スペクトル。 . . . . . . . . . . . . . . . . . . . 64
ii
7.22 Y軸方向のダミー試験における位相差スペクトル。 . . . . . . . . . . . . . . . . . . . 64
7.23 Y軸加振時の、モニター位置による加振の変化。ダミー(真鍮)と BGOに対して、Grmsと最大加速度を示している。横軸は治具からの距離、縦軸は加速度(G=9.8 m/s2)を表す。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
7.24 Z軸方向のダミー試験における PSD。 . . . . . . . . . . . . . . . . . . . . . . . . . . 65
7.25 Z軸方向のダミー試験における伝達率スペクトル。 . . . . . . . . . . . . . . . . . . . 66
7.26 Z軸方向のダミー試験における位相差スペクトル。 . . . . . . . . . . . . . . . . . . . 66
7.27 X軸方向の BGOシールド試験における PSD。 . . . . . . . . . . . . . . . . . . . . . 67
7.28 Y軸方向の BGOシールド試験における PSD。 . . . . . . . . . . . . . . . . . . . . . 68
7.29 Z軸方向の BGOシールド試験における PSD。 . . . . . . . . . . . . . . . . . . . . . . 68
7.30 X軸方向の 0 dB試験の共振での、モニター位置による伝達率の変化。 . . . . . . . . 70
7.31 Y軸方向の 0 dB試験の共振での、モニター位置による伝達率の変化。 . . . . . . . . 70
7.32 BGO結晶が回転するときに共振周波数を推定するモデル。水色はBGO結晶。ばねはCFRPのねじ周りの土台。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
8.1 CFRPに混ぜるGFRPの割合と熱膨張率(-25 ◦Cから 25 ◦Cの平均値)。 . . . . . . 73
8.2 CFRPに混ぜるGFRPの割合とヤング率。 . . . . . . . . . . . . . . . . . . . . . . . 73
8.3 CFRPに混ぜるGFRPの割合と強度。 . . . . . . . . . . . . . . . . . . . . . . . . . . 74
8.4 放射能スペクトル(8 chビンまとめ)。赤はGFRPなし、青はGFRPあり。 . . . . . 75
1 土台部品A。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 土台部品 B。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3 土台部品 C。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
4 土台部品A、B、Cを接着した土台完成品。 . . . . . . . . . . . . . . . . . . . . . . . 3
5 Lアングル。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
6 側板。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
7 治具の設計図。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
8 改良後の Lアングル。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
9 改良後の側板。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
付 表
2.1 ASTRO-Hに搭載される観測機器の基本仕様 . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 H-IIAロケットとM-Vロケットの比較。 . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.1 HXIの性能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.1 SGDの性能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.1 主な無機シンチレータ結晶の特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
iii
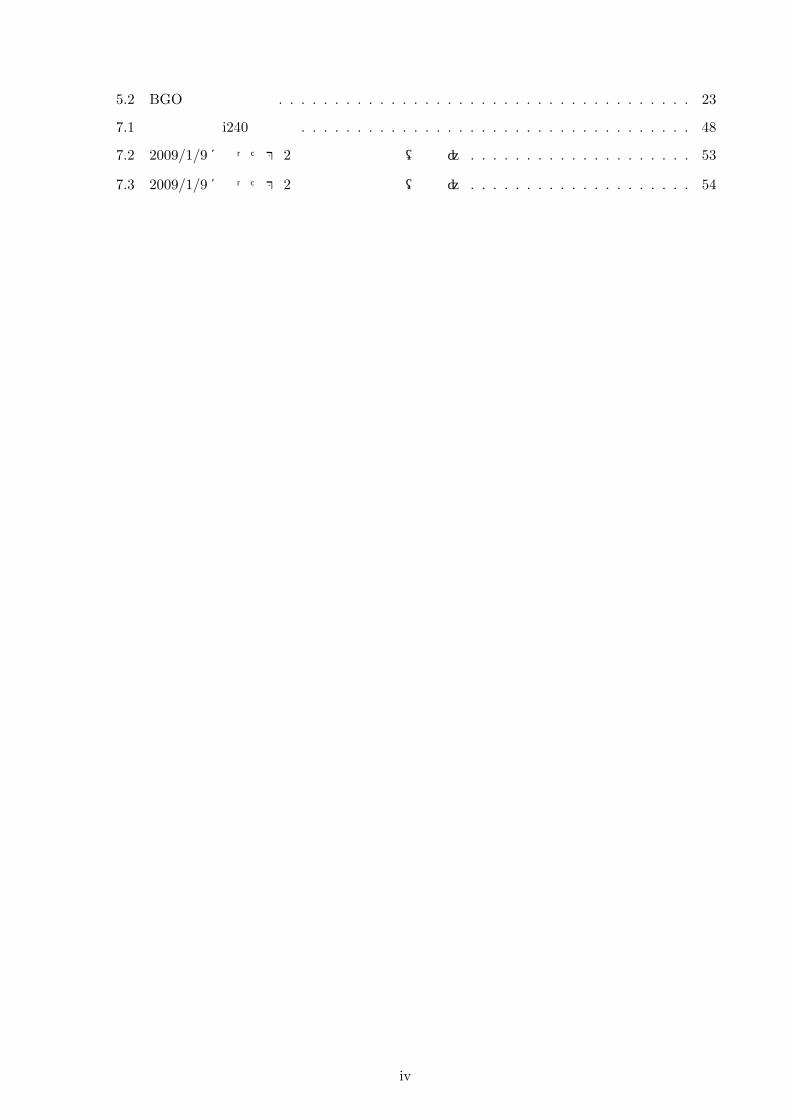
5.2 BGOの機械的特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.1 中型加振機 i240の諸元 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7.2 2009/1/9に行った第 2回振動試験の手順(前半) . . . . . . . . . . . . . . . . . . . . 53
7.3 2009/1/9に行った第 2回振動試験の手順(後半) . . . . . . . . . . . . . . . . . . . . 54
iv
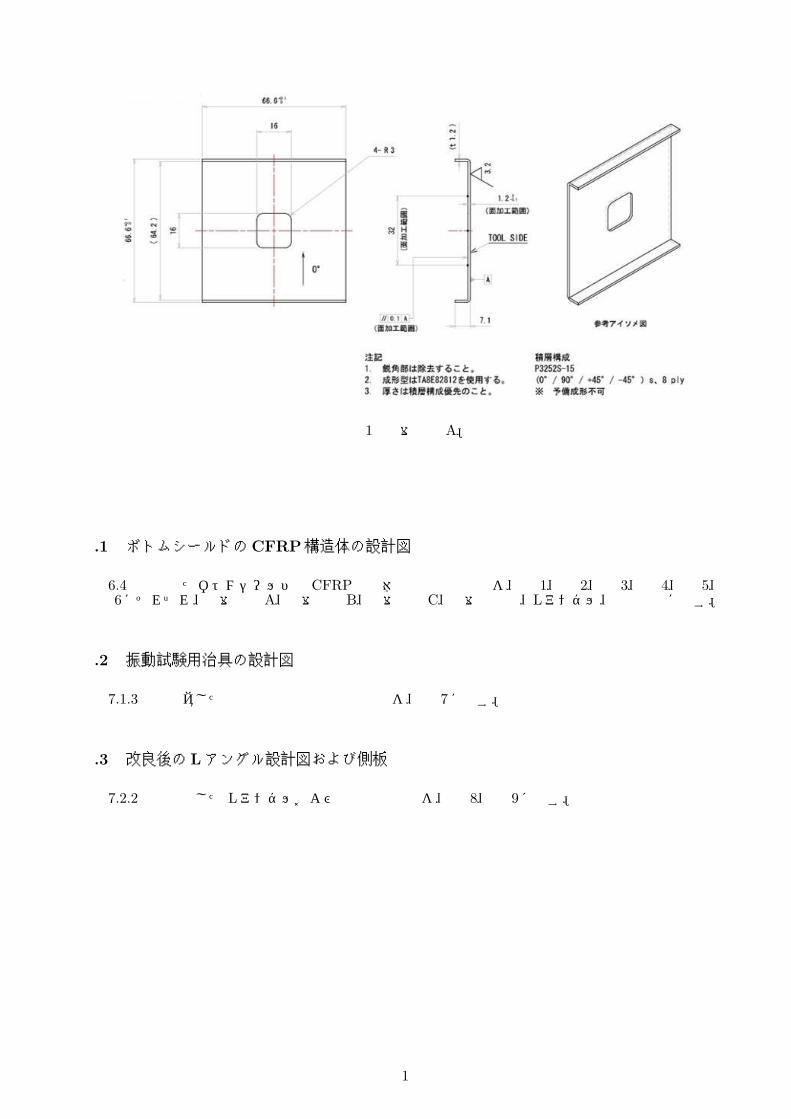
図 1 土台部品A。
付録
.1 ボトムシールドのCFRP構造体の設計図
6.4節で述べたボトムシールドのCFRP構造体の詳細な設計図を、図 1、図 2、図 3、図 4、図 5、図 6にそれぞれ、土台部品A、土台部品B、土台部品C、土台完成品、Lアングル、側板の順に示す。
.2 振動試験用治具の設計図
7.1.3項で考案した振動試験用の治具の設計図を、図 7に示す。
.3 改良後のLアングル設計図および側板
7.2.2項で改良した Lアングルおよび側板の設計図を、図 8、図 9に示す。
1
図 2 土台部品 B。
図 3 土台部品 C。
2
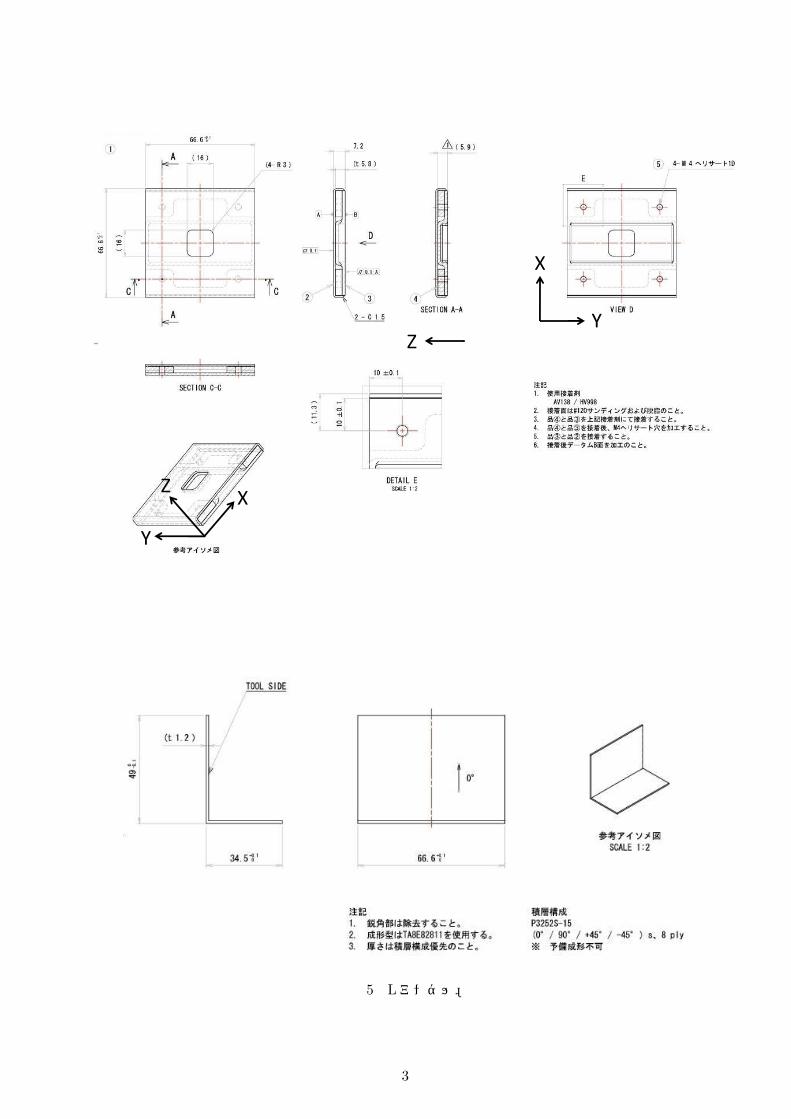
Z
X
Y
X
Y
Z
図 4 土台部品A、B、Cを接着した土台完成品。
図 5 Lアングル。
3
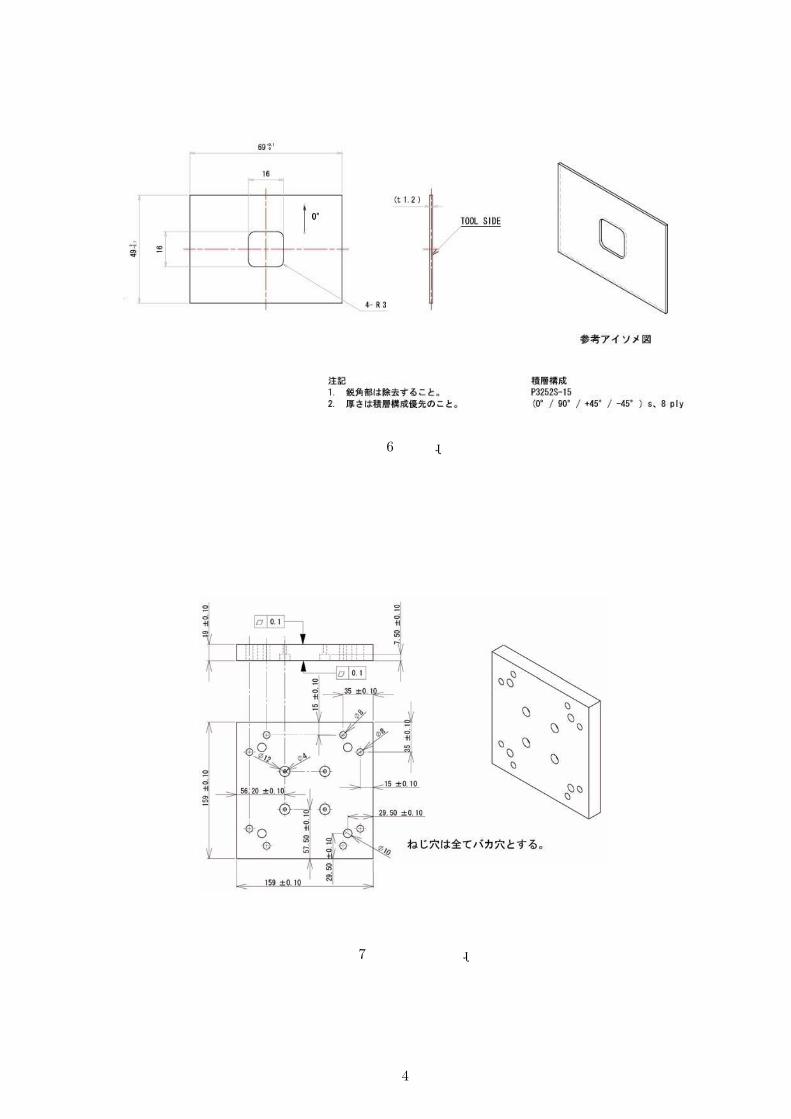
図 6 側板。
図 7 治具の設計図。
4
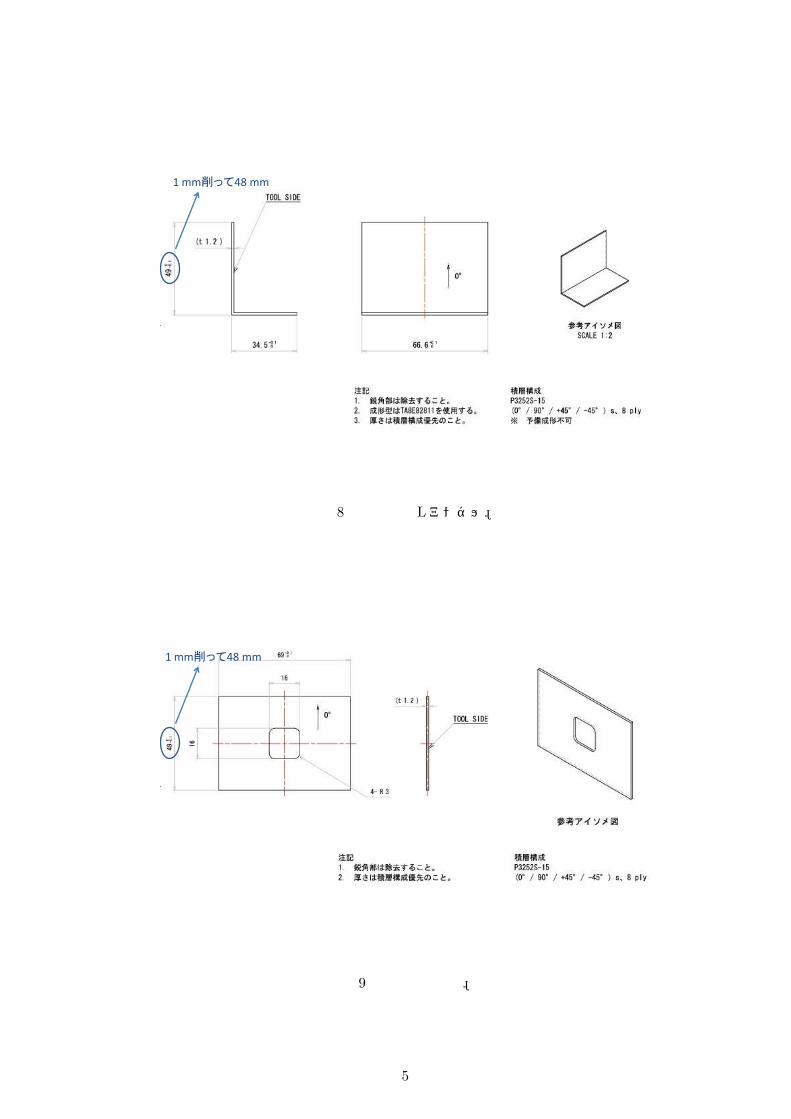
1 mm 48 mm
図 8 改良後の Lアングル。
1 mm 48 mm
図 9 改良後の側板。
5














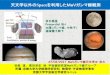








![arXiv:1910.02962v1 [astro-ph.GA] 7 Oct 2019 - 東京大学](https://img.pdfslide.tips/doc/110x75/626b09f0cfec5e2fbd5688f3/arxiv191002962v1-astro-phga-7-oct-2019-.jpg)





