Embed Size (px)
Citation preview
On Contact Topology,
Symplectic Field Theory and the
PDE That Unites Them
index 0
Chris Wendl
University College London
Slides available at:
http://www.homepages.ucl.ac.uk/~ucahcwe/publications.html#talks
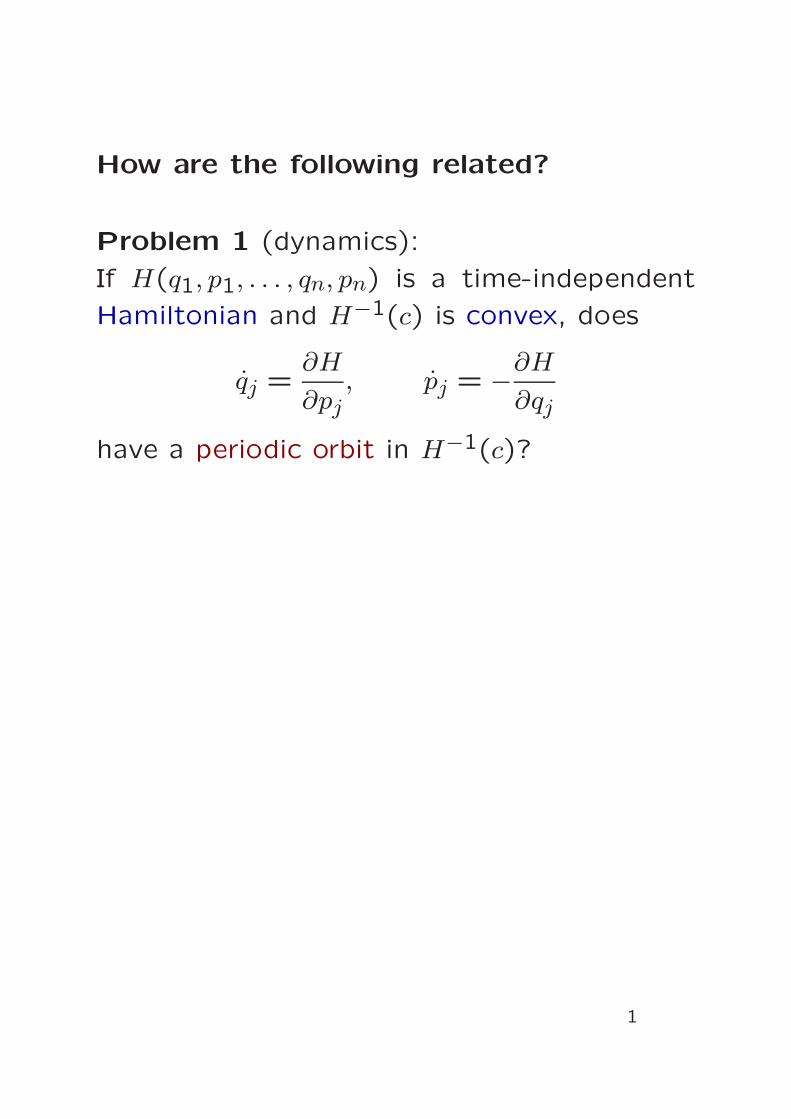
How are the following related?
Problem 1 (dynamics):
If H(q1, p1, . . . , qn, pn) is a time-independent
Hamiltonian and H−1(c) is convex, does
qj =∂H
∂pj, pj = −
∂H
∂qj
have a periodic orbit in H−1(c)?Problem 2 (topology):Is a given losed manifold M the boundary ofany ompa t manifold W?How unique is W?Problem 3 ( omplex geometry / PDE):Given a Riemann surfa e � and omplex man-ifold W , what is the spa e of holomorphi maps �!W?(Finite dimensional? Smooth? Compa t?)Problem 4 (mathemati al physi s):How trivial is my TQFT?1
How are the following related?
Problem 1 (dynamics):
If H(q1, p1, . . . , qn, pn) is a time-independent
Hamiltonian and H−1(c) is convex, does
qj =∂H
∂pj, pj = −
∂H
∂qj
have a periodic orbit in H−1(c)?
Problem 2 (topology):
Is a given closed manifold M the boundary of
any compact manifold W?
How unique is W?Problem 3 ( omplex geometry / PDE):Given a Riemann surfa e � and omplex man-ifold W , what is the spa e of holomorphi maps �!W?(Finite dimensional? Smooth? Compa t?)Problem 4 (mathemati al physi s):How trivial is my TQFT?1
How are the following related?
Problem 1 (dynamics):
If H(q1, p1, . . . , qn, pn) is a time-independent
Hamiltonian and H−1(c) is convex, does
qj =∂H
∂pj, pj = −
∂H
∂qj
have a periodic orbit in H−1(c)?
Problem 2 (topology):
Is a given closed manifold M the boundary of
any compact manifold W?
How unique is W?
Problem 3 (complex geometry / PDE):
Given a Riemann surface Σ and complex man-
ifold W , what is the space of holomorphic
maps Σ → W?
(Finite dimensional? Smooth? Compact?)Problem 4 (mathemati al physi s):How trivial is my TQFT?1
How are the following related?
Problem 1 (dynamics):
If H(q1, p1, . . . , qn, pn) is a time-independent
Hamiltonian and H−1(c) is convex, does
qj =∂H
∂pj, pj = −
∂H
∂qj
have a periodic orbit in H−1(c)?
Problem 2 (topology):
Is a given closed manifold M the boundary of
any compact manifold W?
How unique is W?
Problem 3 (complex geometry / PDE):
Given a Riemann surface Σ and complex man-
ifold W , what is the space of holomorphic
maps Σ → W?
(Finite dimensional? Smooth? Compact?)
Problem 4 (mathematical physics):
How trivial is my TQFT?
1
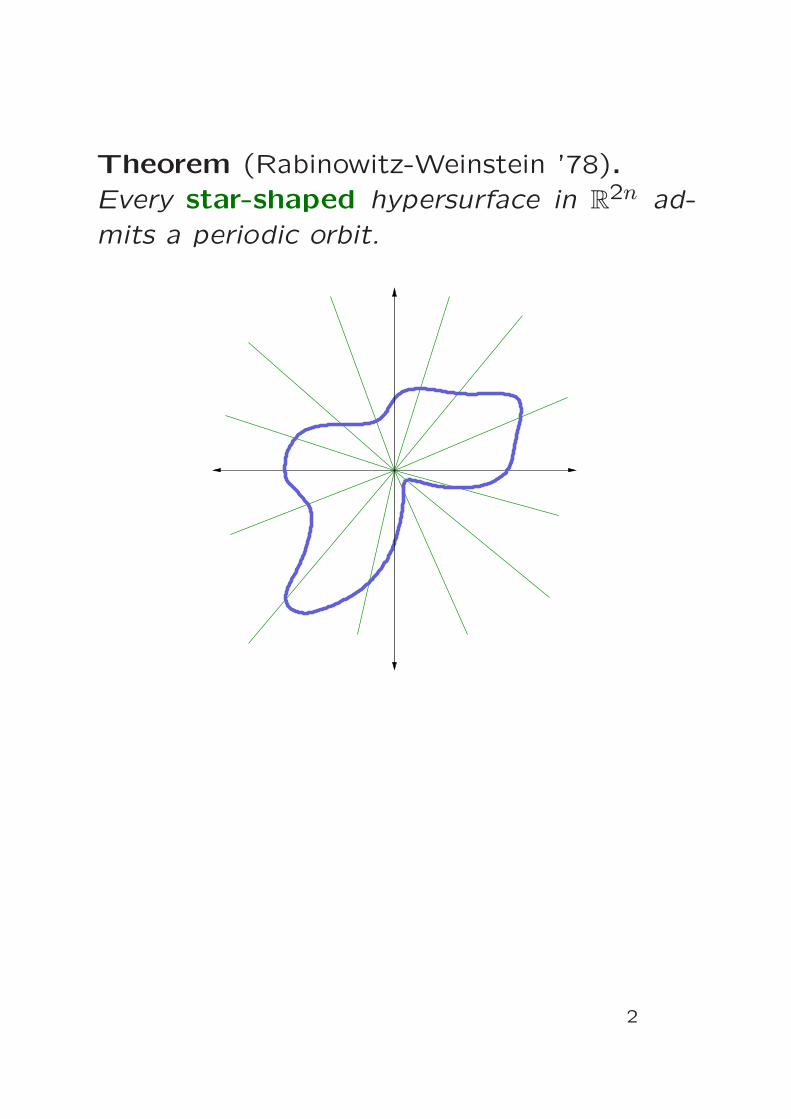
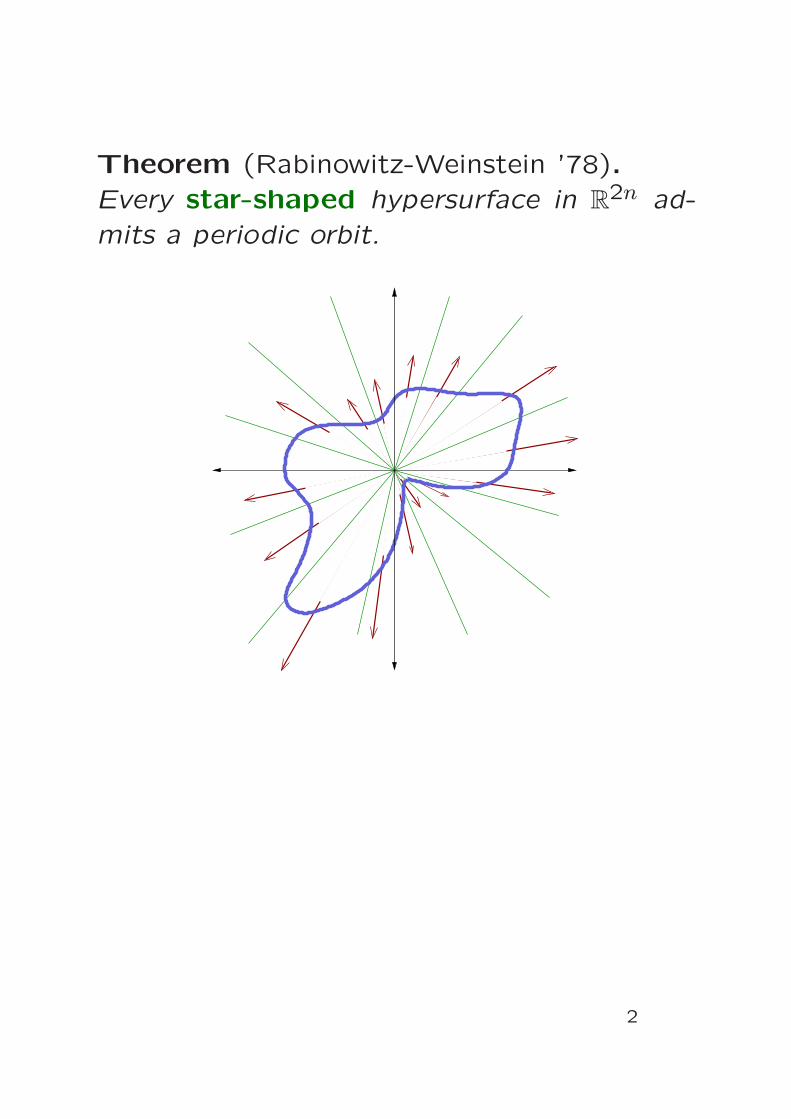
Theorem (Rabinowitz-Weinstein ’78).
Every star-shaped hypersurface in R2n ad-
mits a periodic orbit.
De�nition.A symple ti stru ture on a 2n-dimensional manifold W is a system of lo- al oordinate systems (q1; p1; : : : ; qn; pn) inwhi h Hamilton's equations are invariant.It arries a natural volume form:dp1 dq1 : : : dpn dqn:�W is onvex if it is transverse to a ve tor�eld Y that dilates the symple ti stru ture.2
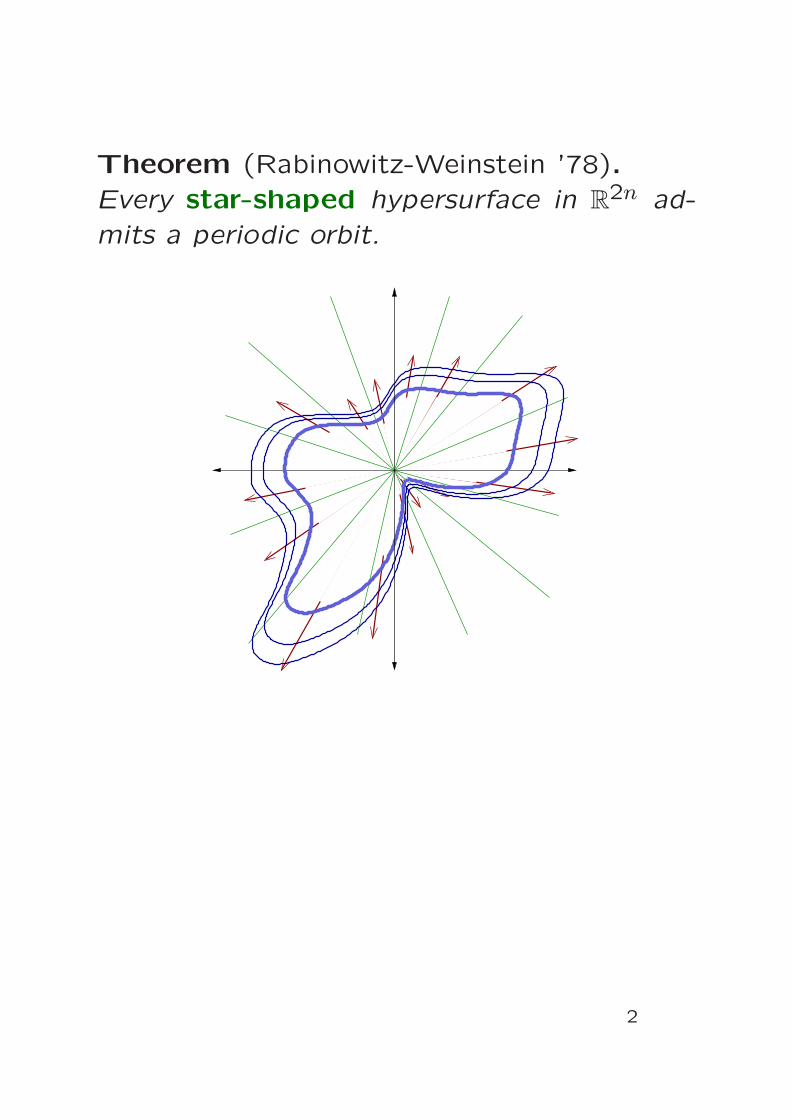
Theorem (Rabinowitz-Weinstein ’78).
Every star-shaped hypersurface in R2n ad-
mits a periodic orbit.
De�nition.A symple ti stru ture on a 2n-dimensional manifold W is a system of lo- al oordinate systems (q1; p1; : : : ; qn; pn) inwhi h Hamilton's equations are invariant.It arries a natural volume form:dp1 dq1 : : : dpn dqn:�W is onvex if it is transverse to a ve tor�eld Y that dilates the symple ti stru ture.2
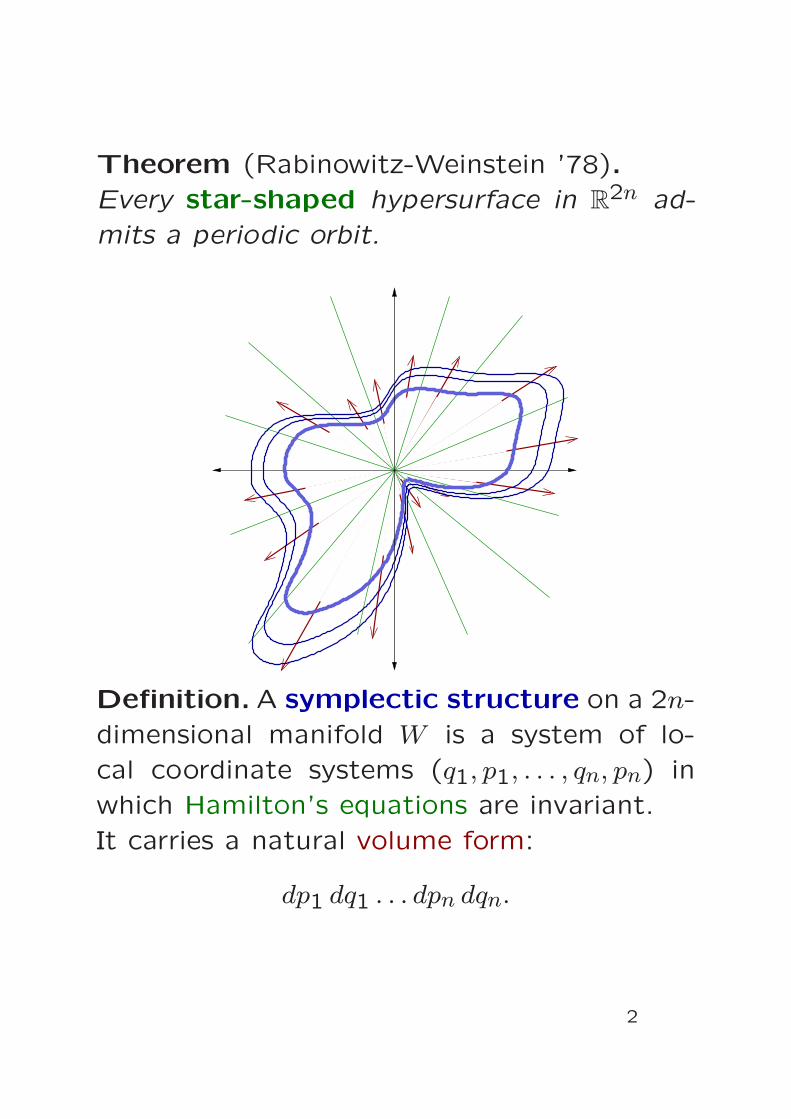
Theorem (Rabinowitz-Weinstein ’78).
Every star-shaped hypersurface in R2n ad-
mits a periodic orbit.
De�nition.A symple ti stru ture on a 2n-dimensional manifold W is a system of lo- al oordinate systems (q1; p1; : : : ; qn; pn) inwhi h Hamilton's equations are invariant.It arries a natural volume form:dp1 dq1 : : : dpn dqn:�W is onvex if it is transverse to a ve tor�eld Y that dilates the symple ti stru ture.2
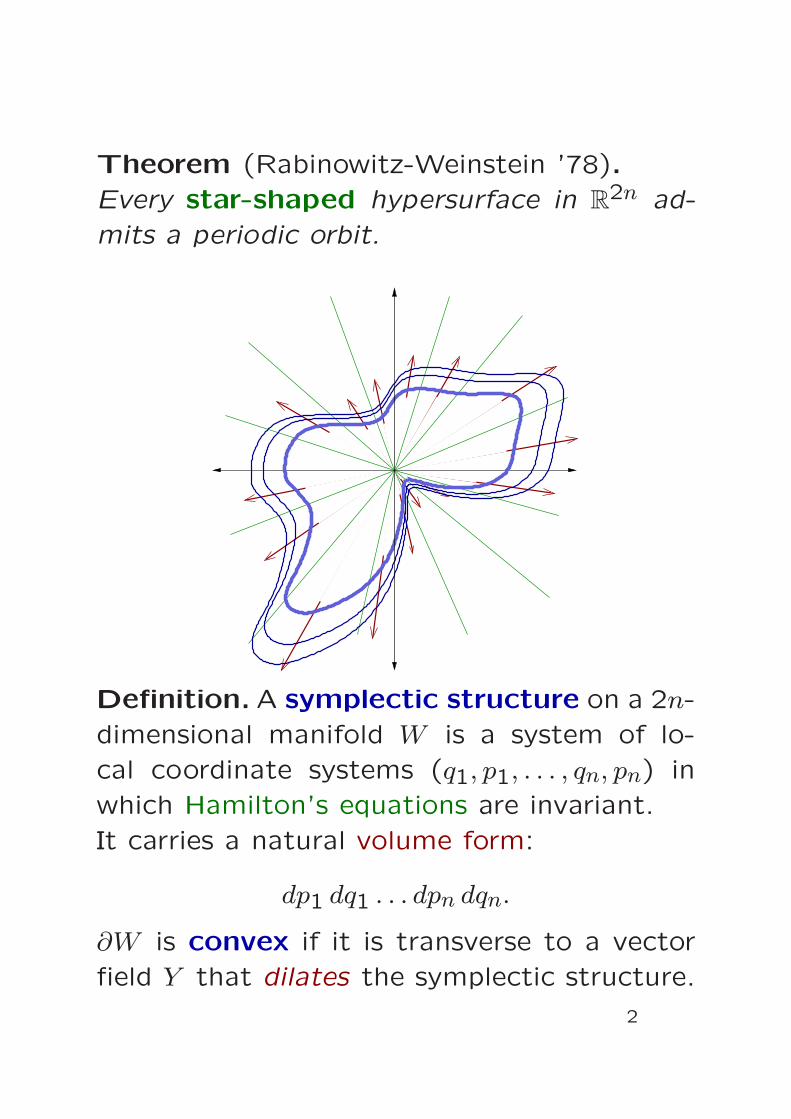
Theorem (Rabinowitz-Weinstein ’78).
Every star-shaped hypersurface in R2n ad-
mits a periodic orbit.
Definition.A symplectic structure on a 2n-
dimensional manifold W is a system of lo-
cal coordinate systems (q1, p1, . . . , qn, pn) in
which Hamilton’s equations are invariant.
It carries a natural volume form:
dp1 dq1 . . . dpn dqn.�W is onvex if it is transverse to a ve tor�eld Y that dilates the symple ti stru ture.2
Theorem (Rabinowitz-Weinstein ’78).
Every star-shaped hypersurface in R2n ad-
mits a periodic orbit.
Definition.A symplectic structure on a 2n-
dimensional manifold W is a system of lo-
cal coordinate systems (q1, p1, . . . , qn, pn) in
which Hamilton’s equations are invariant.
It carries a natural volume form:
dp1 dq1 . . . dpn dqn.
∂W is convex if it is transverse to a vector
field Y that dilates the symplectic structure.
2
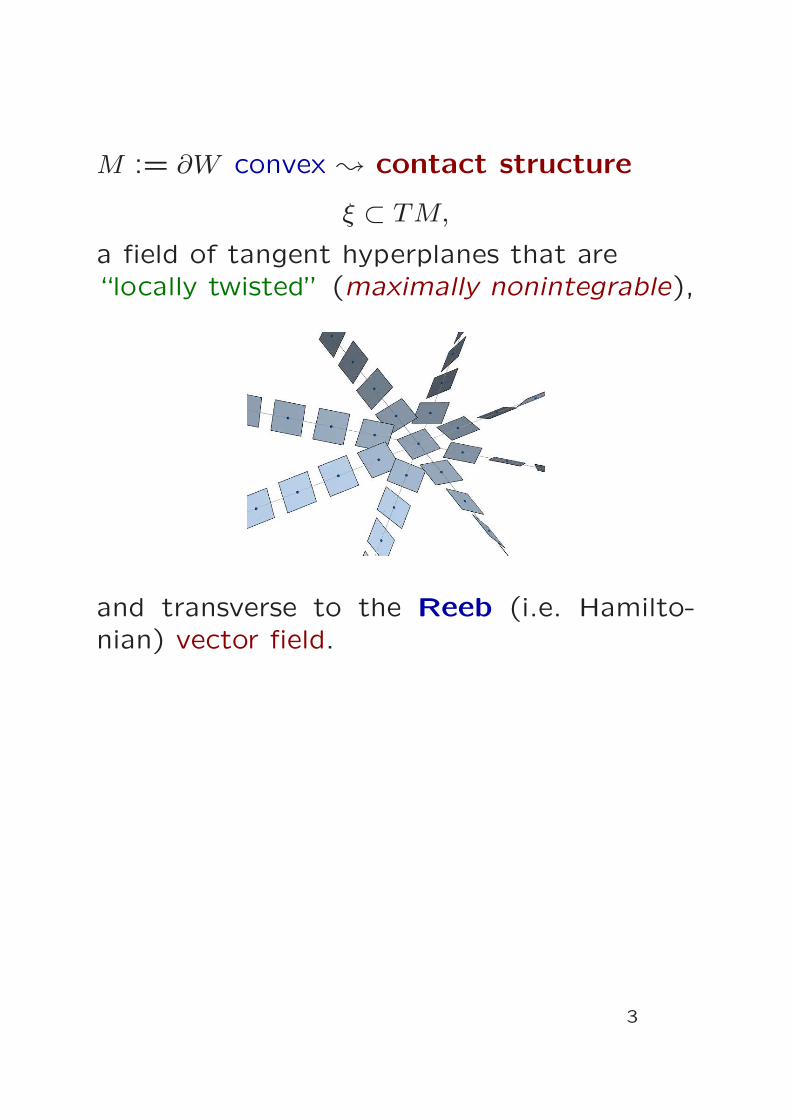
M := ∂W convex ; contact structure
ξ ⊂ TM,
a field of tangent hyperplanes that are
“locally twisted” (maximally nonintegrable),
and transverse to the Reeb (i.e. Hamilto-
nian) vector field.Example: T3 := S1 � S1 � S1
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)S1�(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+= boundary of T2 �D = D�T2 � T �T2.3
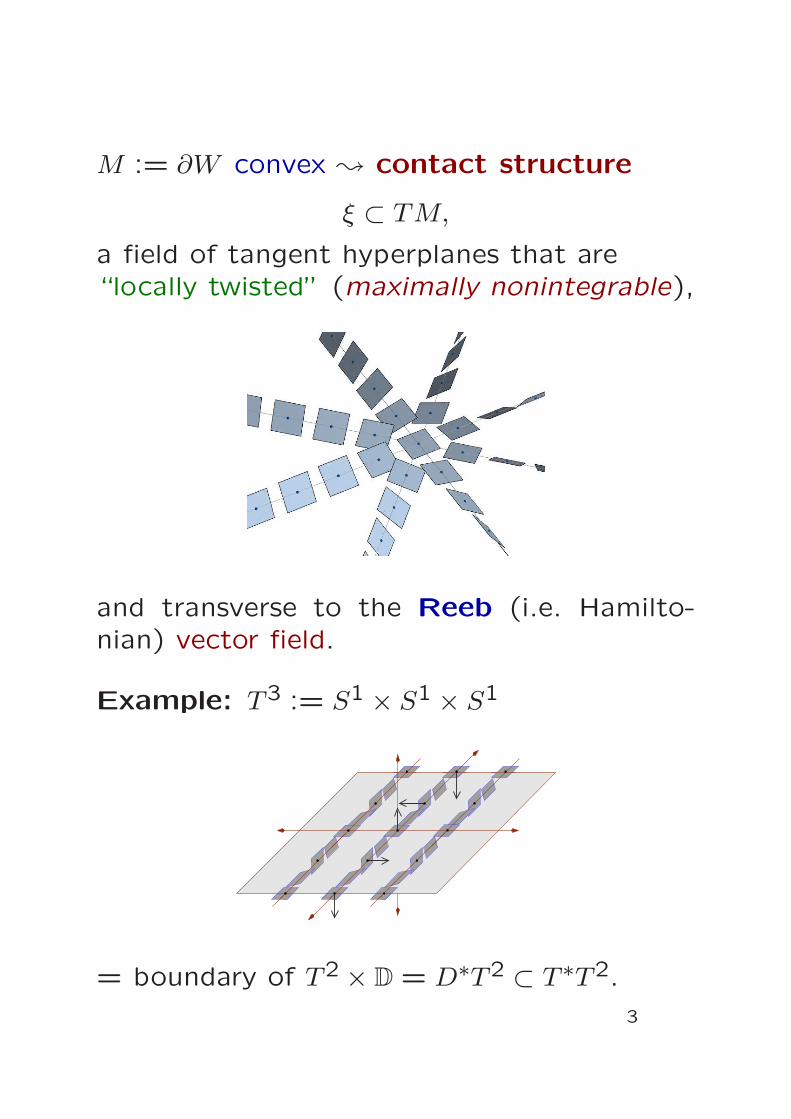
M := ∂W convex ; contact structure
ξ ⊂ TM,
a field of tangent hyperplanes that are
“locally twisted” (maximally nonintegrable),
and transverse to the Reeb (i.e. Hamilto-
nian) vector field.
Example: T3 := S1 × S1 × S1
= boundary of T2 × D = D∗T2 ⊂ T ∗T2.
3
Some hard problems in contact topology
1. Classification of contact structures:
given ξ1, ξ2 on M , is there a diffeomor-
phism ϕ : M → M mapping ξ1 to ξ2?2. Weinstein onje ture:Every Reeb ve tor �eld on every losed onta t manifold has a periodi orbit?3. Partial orders: say (M�; ��) � (M+; �+)if there is a (symple ti , exa t or Stein) obordism between them.
PSfrag repla ementsS1���WW
(M+; �+)
(M�; ��)
S1�(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+When is (M�; ��) � (M+; �+)?When is ; � (M; �)? (Is it �llable?)4
Some hard problems in contact topology
1. Classification of contact structures:
given ξ1, ξ2 on M , is there a diffeomor-
phism ϕ : M → M mapping ξ1 to ξ2?
2. Weinstein conjecture:
Every Reeb vector field on every closed
contact manifold has a periodic orbit?
3. Partial orders: say (M�; ��) � (M+; �+)if there is a (symple ti , exa t or Stein) obordism between them.
PSfrag repla ementsS1���WW
(M+; �+)
(M�; ��)
S1�(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+When is (M�; ��) � (M+; �+)?When is ; � (M; �)? (Is it �llable?)4
Some hard problems in contact topology
1. Classification of contact structures:
given ξ1, ξ2 on M , is there a diffeomor-
phism ϕ : M → M mapping ξ1 to ξ2?
2. Weinstein conjecture:
Every Reeb vector field on every closed
contact manifold has a periodic orbit?
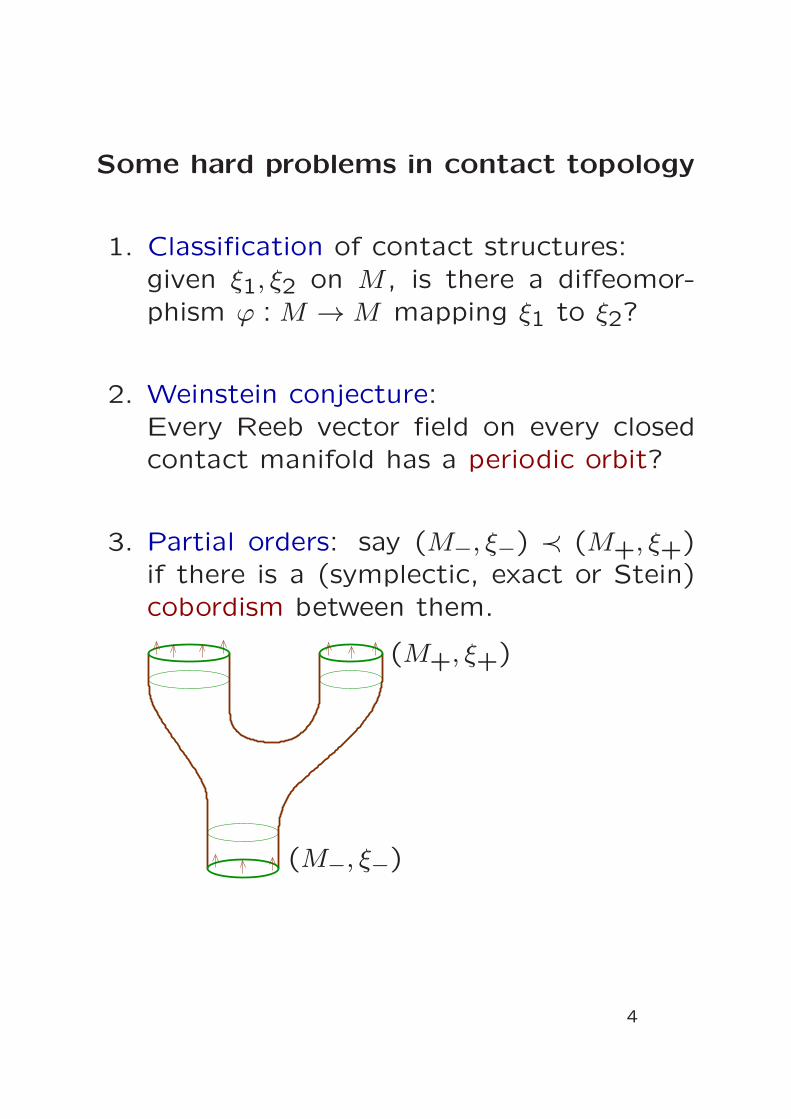
3. Partial orders: say (M−, ξ−) ≺ (M+, ξ+)
if there is a (symplectic, exact or Stein)
cobordism between them.
(M+, ξ+)
(M−, ξ−)
-dimensional
When is (M�; ��) � (M+; �+)?When is ; � (M; �)? (Is it �llable?)4
Some hard problems in contact topology
1. Classification of contact structures:
given ξ1, ξ2 on M , is there a diffeomor-
phism ϕ : M → M mapping ξ1 to ξ2?
2. Weinstein conjecture:
Every Reeb vector field on every closed
contact manifold has a periodic orbit?
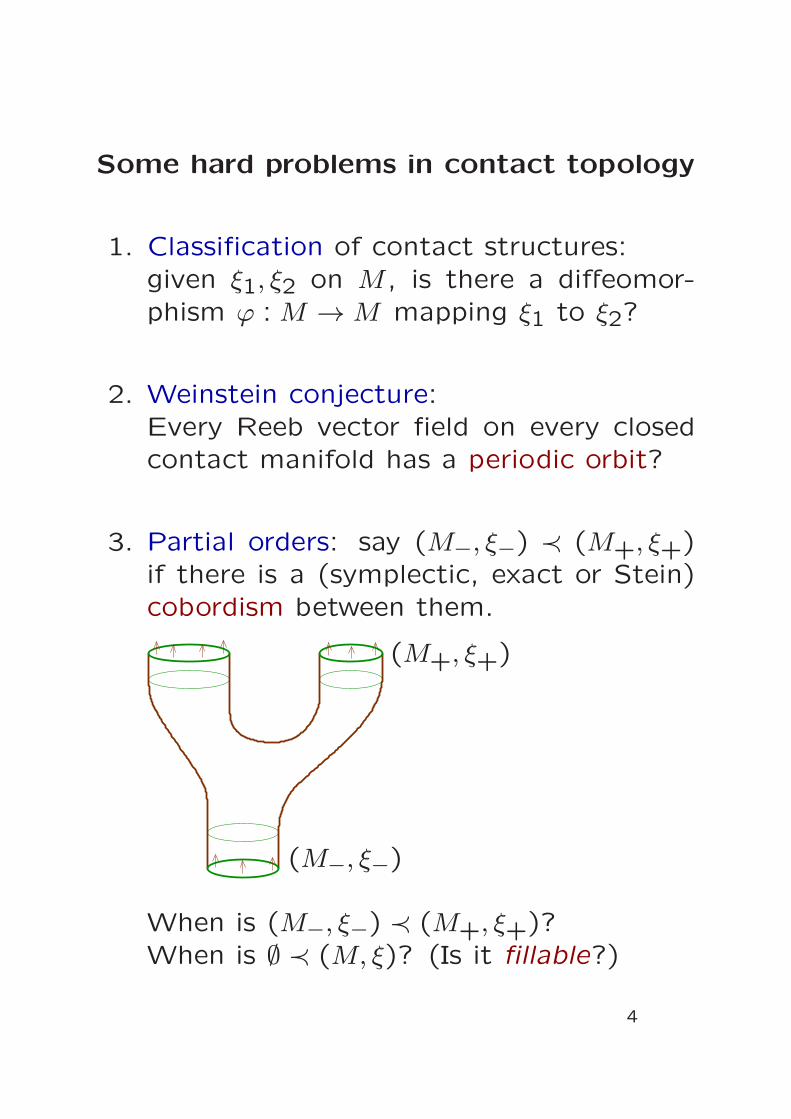
3. Partial orders: say (M−, ξ−) ≺ (M+, ξ+)
if there is a (symplectic, exact or Stein)
cobordism between them.
(M+, ξ+)
(M−, ξ−)
-dimensional
When is (M−, ξ−) ≺ (M+, ξ+)?
When is ∅ ≺ (M, ξ)? (Is it fillable?)
4
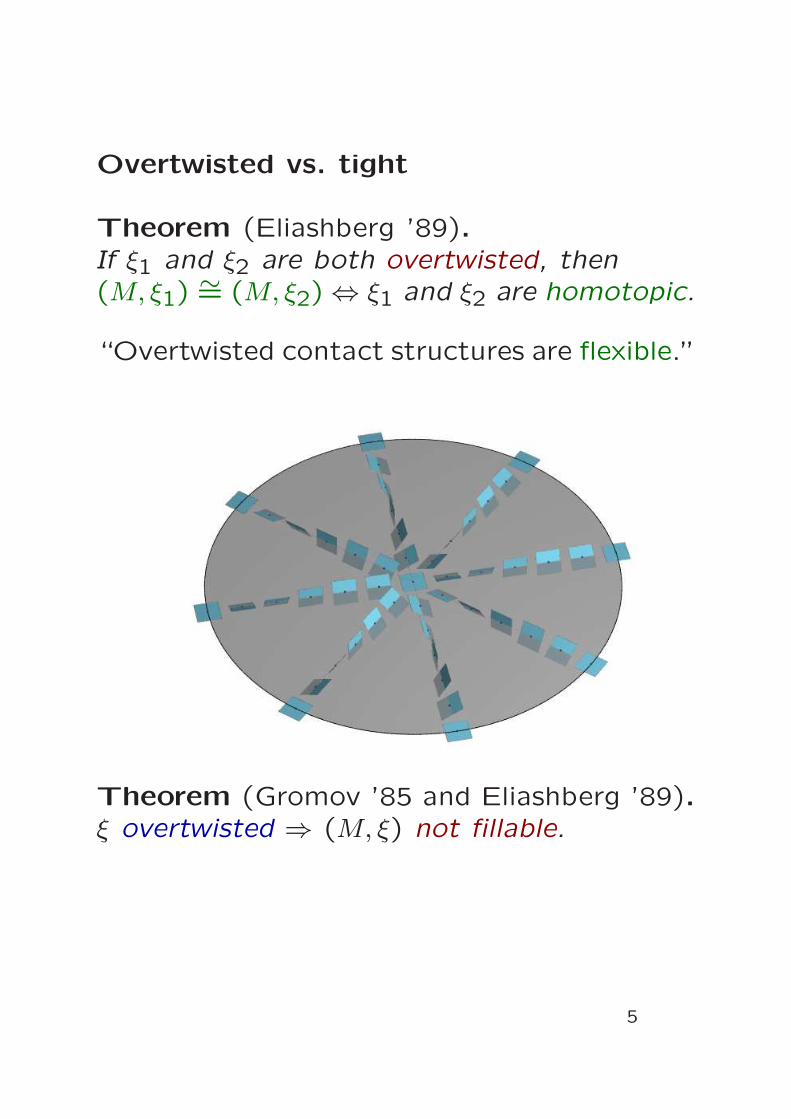
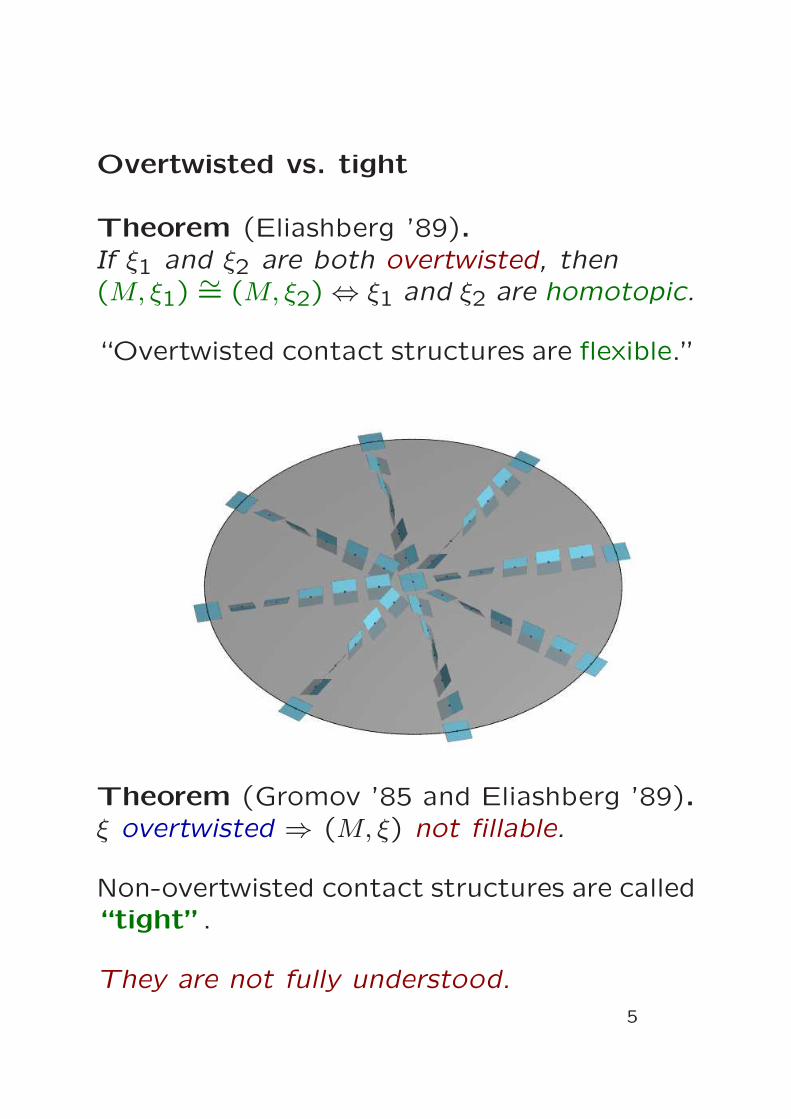
Overtwisted vs. tight
Theorem (Eliashberg ’89).If ξ1 and ξ2 are both overtwisted, then(M, ξ1)
∼= (M, ξ2) ⇔ ξ1 and ξ2 are homotopic.\Overtwisted onta t stru tures are exible."
1]×
Theorem (Gromov '85 and Eliashberg '89).� overtwisted ) (M; �) not �llable.Non-overtwisted onta t stru tures are alled\tight".They are not fully understood.5
Overtwisted vs. tight
Theorem (Eliashberg ’89).If ξ1 and ξ2 are both overtwisted, then(M, ξ1)
∼= (M, ξ2) ⇔ ξ1 and ξ2 are homotopic.
“Overtwisted contact structures are flexible.”
1]×
Theorem (Gromov '85 and Eliashberg '89).� overtwisted ) (M; �) not �llable.Non-overtwisted onta t stru tures are alled\tight".They are not fully understood.5
Overtwisted vs. tight
Theorem (Eliashberg ’89).If ξ1 and ξ2 are both overtwisted, then(M, ξ1)
∼= (M, ξ2) ⇔ ξ1 and ξ2 are homotopic.
“Overtwisted contact structures are flexible.”
1]×
Theorem (Gromov ’85 and Eliashberg ’89).ξ overtwisted ⇒ (M, ξ) not fillable.Non-overtwisted onta t stru tures are alled\tight".They are not fully understood.
5
Overtwisted vs. tight
Theorem (Eliashberg ’89).If ξ1 and ξ2 are both overtwisted, then(M, ξ1)
∼= (M, ξ2) ⇔ ξ1 and ξ2 are homotopic.
“Overtwisted contact structures are flexible.”
1]×
Theorem (Gromov ’85 and Eliashberg ’89).ξ overtwisted ⇒ (M, ξ) not fillable.
Non-overtwisted contact structures are called“tight”.
They are not fully understood.
5
Conjecture.
Suppose (M, ξ)contact surgery−−−−−−−−−−−→ (M ′, ξ′).
Then (M, ξ) tight ⇒ (M ′, ξ′) tight.Surgery ! handle atta hing obordism:D y D
zylinder
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)S1�(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 2
4-dimensional2-handle
�[0;1℄�M
MM
M 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+�([0;1℄�M) = �M tM
6
Conjecture.
Suppose (M, ξ)contact surgery−−−−−−−−−−−→ (M ′, ξ′).
Then (M, ξ) tight ⇒ (M ′, ξ′) tight.
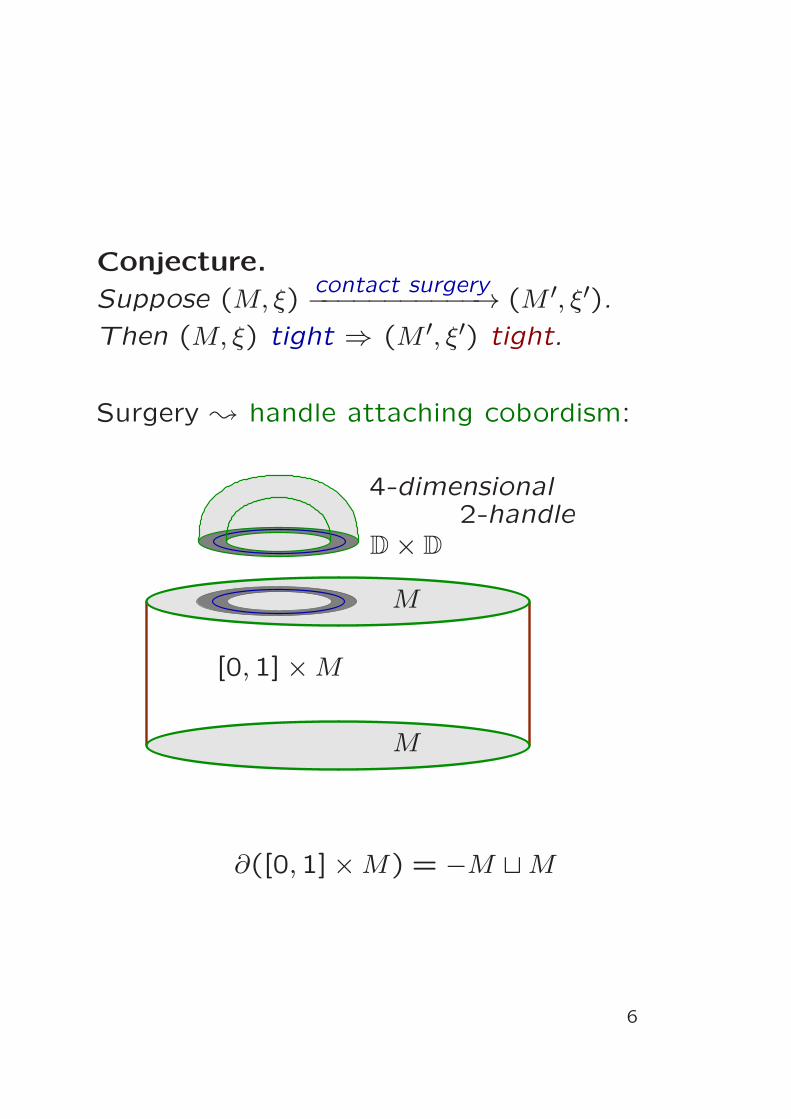
Surgery ; handle attaching cobordism:
4-dimensional2-handle
D× D
[0,1]×M
M
M
∂([0,1]×M) = −M ⊔M
6
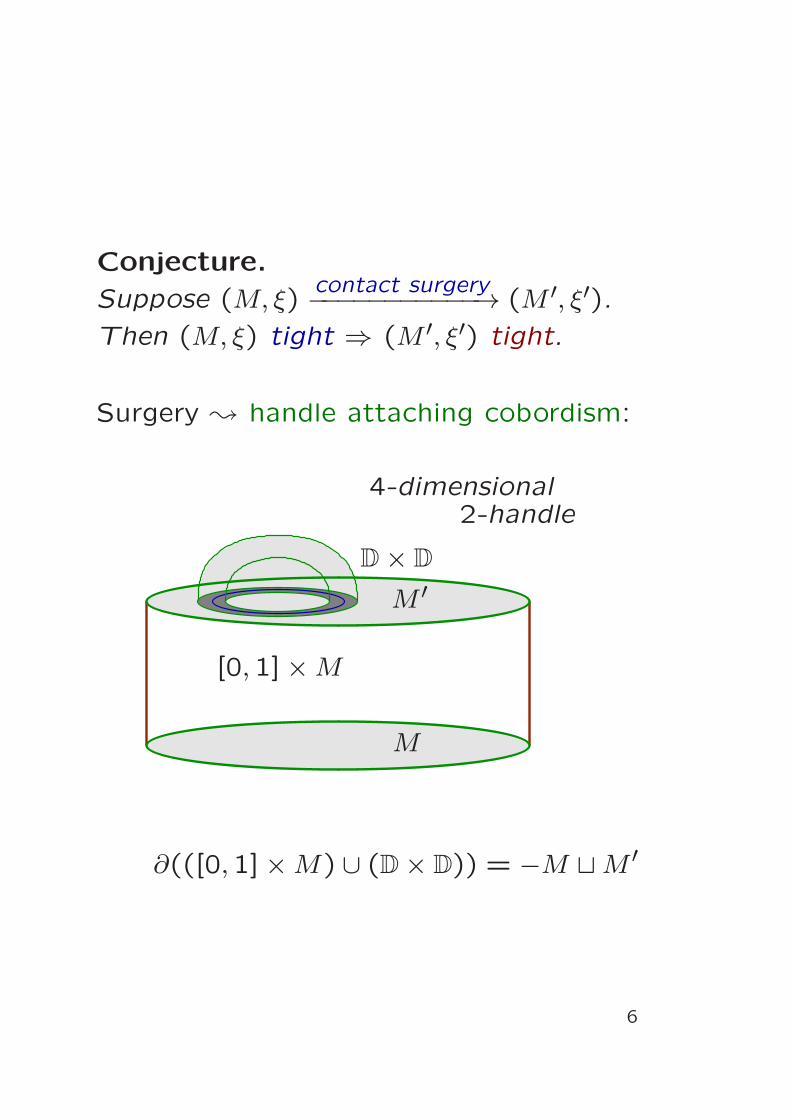
Conjecture.
Suppose (M, ξ)contact surgery−−−−−−−−−−−→ (M ′, ξ′).
Then (M, ξ) tight ⇒ (M ′, ξ′) tight.
Surgery ; handle attaching cobordism:
4-dimensional2-handle
D× D
[0,1]×M
M
M ′
∂(([0,1]×M) ∪ (D× D)) = −M ⊔M ′
6
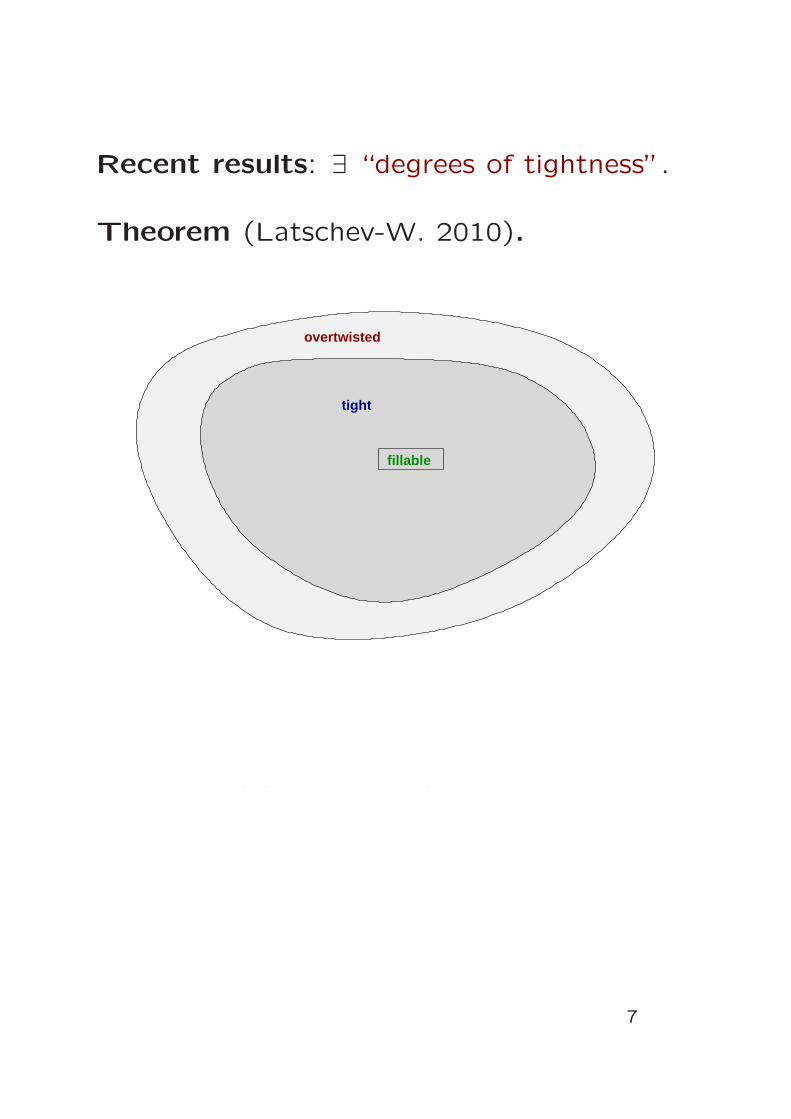
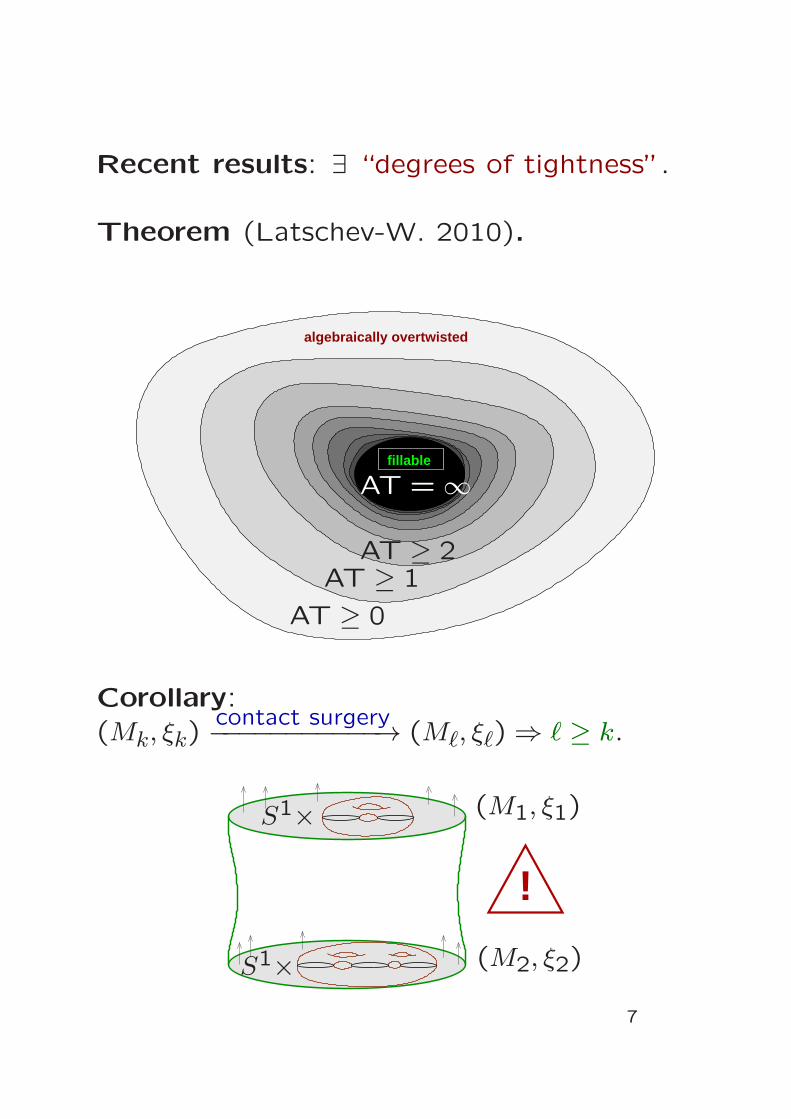
Recent results: ∃ “degrees of tightness”.
Theorem (Latschev-W. 2010).
overtwisted
fillable
tight
Corollary:(Mk; �k) onta t surgery�����������! (M`; �`)) ` � k.!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�S1� (M1; �1)
(M2; �2)
[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+7
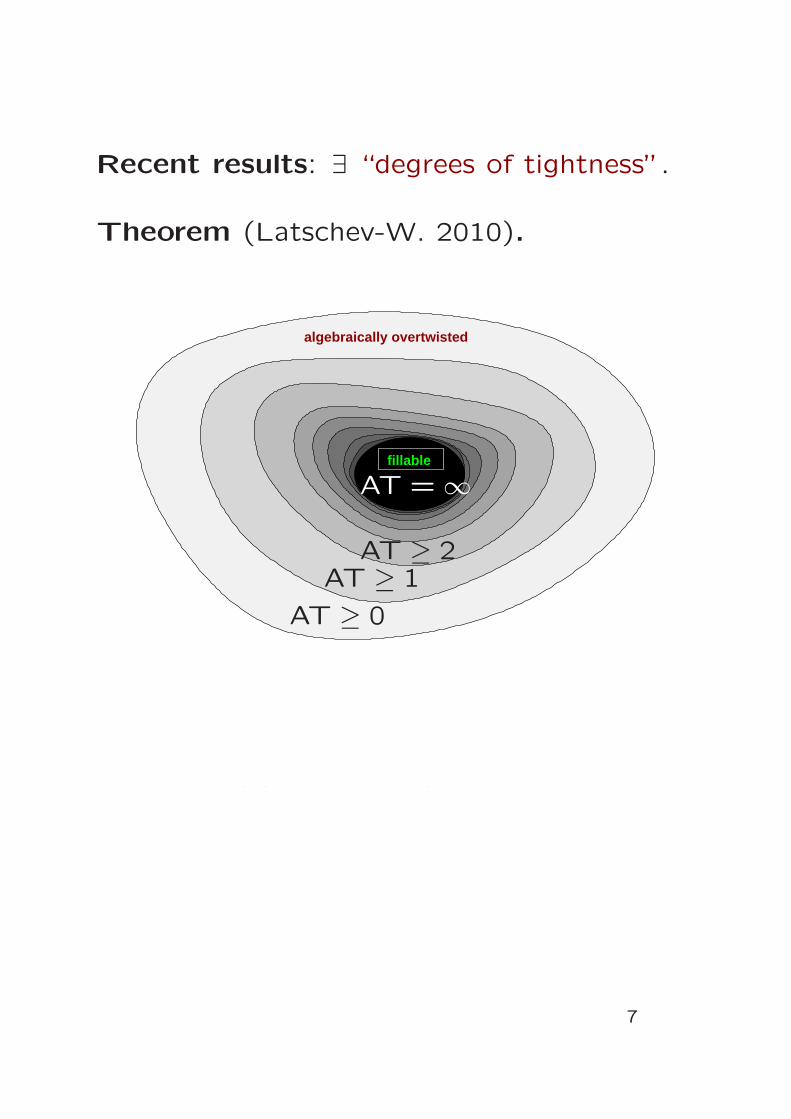
Recent results: ∃ “degrees of tightness”.
Theorem (Latschev-W. 2010).
algebraically overtwisted
fillable
AT = ∞
AT ≥ 0
AT ≥ 1AT ≥ 2
Corollary:(Mk; �k) onta t surgery�����������! (M`; �`)) ` � k.!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�S1� (M1; �1)
(M2; �2)
[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+7
Recent results: ∃ “degrees of tightness”.
Theorem (Latschev-W. 2010).
There exists a numerical contact invariant
AT(M, ξ) ∈ N ∪ {0,∞} such that:
• (M−, ξ−) ≺ (M+, ξ+) ⇒
AT(M−, ξ−) ≤ AT(M+, ξ+)� AT(M; �) = 0 ,(M; �) is algebrai ally overtwisted� (M; �) �llable ) AT(M; �) =1� 8k, 9(Mk; �k) with AT(Mk; �k) = k.Corollary:(Mk; �k) onta t surgery�����������! (M`; �`)) ` � k.
!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�S1� (M1; �1)
(M2; �2)
[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+7
Recent results: ∃ “degrees of tightness”.
Theorem (Latschev-W. 2010).
There exists a numerical contact invariant
AT(M, ξ) ∈ N ∪ {0,∞} such that:
• (M−, ξ−) ≺ (M+, ξ+) ⇒
AT(M−, ξ−) ≤ AT(M+, ξ+)
• AT(M, ξ) = 0 ⇔
(M, ξ) is algebraically overtwisted� (M; �) �llable ) AT(M; �) =1� 8k, 9(Mk; �k) with AT(Mk; �k) = k.Corollary:(Mk; �k) onta t surgery�����������! (M`; �`)) ` � k.
!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�S1� (M1; �1)
(M2; �2)
[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+7
Recent results: ∃ “degrees of tightness”.
Theorem (Latschev-W. 2010).
There exists a numerical contact invariant
AT(M, ξ) ∈ N ∪ {0,∞} such that:
• (M−, ξ−) ≺ (M+, ξ+) ⇒
AT(M−, ξ−) ≤ AT(M+, ξ+)
• AT(M, ξ) = 0 ⇔
(M, ξ) is algebraically overtwisted
• (M, ξ) fillable ⇒ AT(M, ξ) = ∞� 8k, 9(Mk; �k) with AT(Mk; �k) = k.Corollary:(Mk; �k) onta t surgery�����������! (M`; �`)) ` � k.
!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�S1� (M1; �1)
(M2; �2)
[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+7
Recent results: ∃ “degrees of tightness”.
Theorem (Latschev-W. 2010).
There exists a numerical contact invariant
AT(M, ξ) ∈ N ∪ {0,∞} such that:
• (M−, ξ−) ≺ (M+, ξ+) ⇒
AT(M−, ξ−) ≤ AT(M+, ξ+)
• AT(M, ξ) = 0 ⇔
(M, ξ) is algebraically overtwisted
• (M, ξ) fillable ⇒ AT(M, ξ) = ∞
• ∀k, ∃(Mk, ξk) with AT(Mk, ξk) = k.
Corollary:(Mk; �k) onta t surgery�����������! (M`; �`)) ` � k.!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�S1� (M1; �1)
(M2; �2)
[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+7
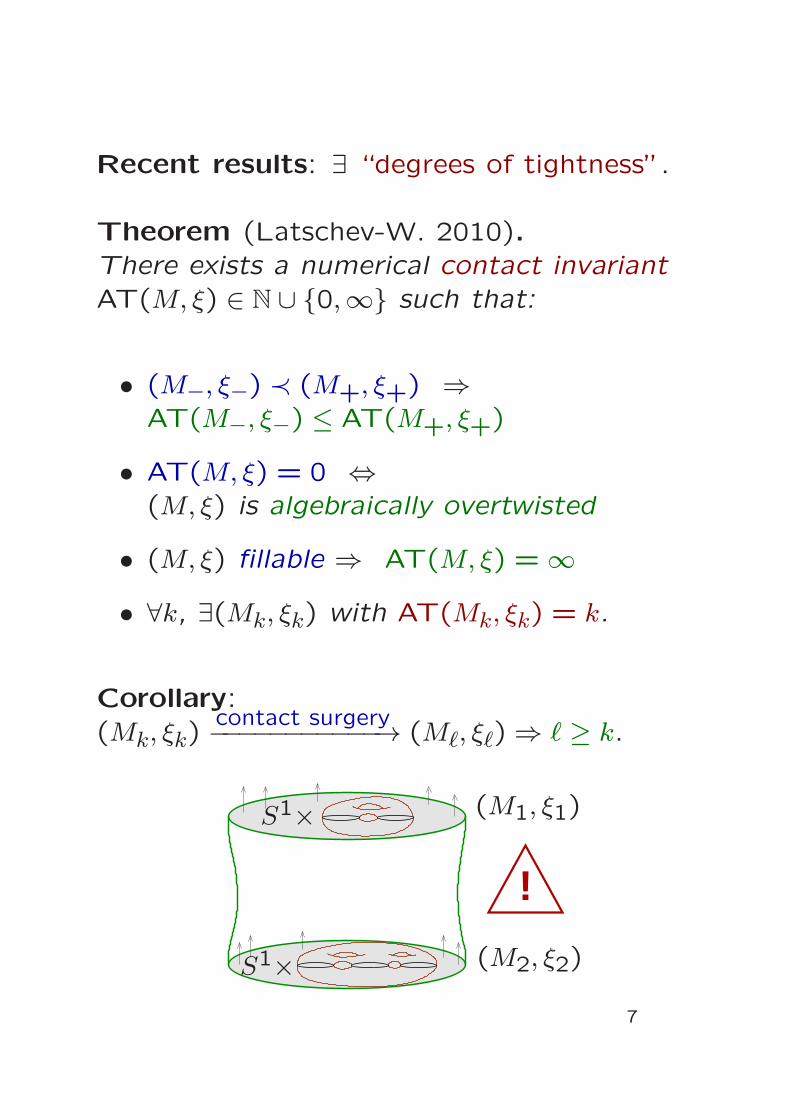
Recent results: ∃ “degrees of tightness”.
Theorem (Latschev-W. 2010).
There exists a numerical contact invariant
AT(M, ξ) ∈ N ∪ {0,∞} such that:
• (M−, ξ−) ≺ (M+, ξ+) ⇒
AT(M−, ξ−) ≤ AT(M+, ξ+)
• AT(M, ξ) = 0 ⇔
(M, ξ) is algebraically overtwisted
• (M, ξ) fillable ⇒ AT(M, ξ) = ∞
• ∀k, ∃(Mk, ξk) with AT(Mk, ξk) = k.
Corollary:
(Mk, ξk)contact surgery−−−−−−−−−−−→ (Mℓ, ξℓ) ⇒ ℓ ≥ k.
!
S1×
S1×
(M1, ξ1)
(M2, ξ2)
7
Recent results: ∃ “degrees of tightness”.
Theorem (Latschev-W. 2010).
algebraically overtwisted
fillable
AT = ∞
AT ≥ 0
AT ≥ 1AT ≥ 2
Corollary:
(Mk, ξk)contact surgery−−−−−−−−−−−→ (Mℓ, ξℓ) ⇒ ℓ ≥ k.
!
S1×
S1×
(M1, ξ1)
(M2, ξ2)
7
Symplectic Field Theory
(Eliashberg-Givental-Hofer ’00 + Cieliebak-Latschev ’09)
(M, ξ) with Reeb vector field ;
P := {periodic Reeb orbits on M}.
A := graded commutative algebra with unit
and generators {qγ}γ∈P.W := fformal power series F(q ; p ; h)g with,[p ; q 0℄ = Æ ; 0h:F 2 W, substitute p := h� ��q � ! operatorDF : A[[h℄℄! A[[h℄℄\Theorem": There exists H 2 W withH2 = 0 su h that DH(1) = 0 andHSFT� (M; �) := H�(A[[h℄℄; DH) := kerDHimDHis a onta t invariant.Symple ti obordism (M�; ��) � (M+; �+)! natural mapHSFT� (M+; �+)! HSFT� (M�; ��)preserving elements of R[[h℄℄.8
Symplectic Field Theory
(Eliashberg-Givental-Hofer ’00 + Cieliebak-Latschev ’09)
(M, ξ) with Reeb vector field ;
P := {periodic Reeb orbits on M}.
A := graded commutative algebra with unit
and generators {qγ}γ∈P.
W := {formal power series F(qγ, pγ, ~)} with,
[pγ, qγ′] = δγ,γ′~.
F ∈ W, substitute pγ := ~∂
∂qγ; operator
DF : A[[~]] → A[[~]]\Theorem": There exists H 2 W withH2 = 0 su h that DH(1) = 0 andHSFT� (M; �) := H�(A[[h℄℄; DH) := kerDHimDHis a onta t invariant.Symple ti obordism (M�; ��) � (M+; �+)) natural mapHSFT� (M+; �+)! HSFT� (M�; ��)preserving elements of R[[h℄℄.8
Symplectic Field Theory
(Eliashberg-Givental-Hofer ’00 + Cieliebak-Latschev ’09)
(M, ξ) with Reeb vector field ;
P := {periodic Reeb orbits on M}.
A := graded commutative algebra with unit
and generators {qγ}γ∈P.
W := {formal power series F(qγ, pγ, ~)} with,
[pγ, qγ′] = δγ,γ′~.
F ∈ W, substitute pγ := ~∂
∂qγ; operator
DF : A[[~]] → A[[~]]
“Theorem”: There exists H ∈ W with
H2 = 0 such that DH(1) = 0 and
HSFT∗ (M, ξ) := H∗(A[[~]], DH) :=
kerDH
imDH
is a contact invariant.Symple ti obordism (M�; ��) � (M+; �+)) natural mapHSFT� (M+; �+)! HSFT� (M�; ��)preserving elements of R[[h℄℄.8
Symplectic Field Theory
(Eliashberg-Givental-Hofer ’00 + Cieliebak-Latschev ’09)
(M, ξ) with Reeb vector field ;
P := {periodic Reeb orbits on M}.
A := graded commutative algebra with unit
and generators {qγ}γ∈P.
W := {formal power series F(qγ, pγ, ~)} with,
[pγ, qγ′] = δγ,γ′~.
F ∈ W, substitute pγ := ~∂
∂qγ; operator
DF : A[[~]] → A[[~]]
“Theorem”: There exists H ∈ W with
H2 = 0 such that DH(1) = 0 and
HSFT∗ (M, ξ) := H∗(A[[~]], DH) :=
kerDH
imDH
is a contact invariant.
Symplectic cobordism (M−, ξ−) ≺ (M+, ξ+)
; natural map
HSFT∗ (M+, ξ+) → HSFT
∗ (M−, ξ−)
preserving elements of R[[~]].
8
Example
If no periodic orbits, then HSFT∗ (M, ξ) = R[[~]].De�nition (Lats hev-W.).(M; �) has algebrai k-torsion if[hk℄ = 0 2 HSFT� (M; �).AT(M; �) := sup nk ��� [hk�1℄ 6= 0 2 HSFT� (M; �)o
ExampleOvertwisted )all \interesting" onta t invariants vanish:HSFT� (M; �) = f0g ) [1℄ = 0) AT(M; �) = 0:Theorem.Algebrai k-torsion ) not �llable.notemptr
emptr
!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�
(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+9
Example
If no periodic orbits, then HSFT∗ (M, ξ) = R[[~]].
Definition (Latschev-W.).
We say (M, ξ) has algebraic k-torsion if
[~k] = 0 ∈ HSFT∗ (M, ξ).AT(M; �) := sup nk ��� [hk�1℄ 6= 0 2 HSFT� (M; �)o
ExampleOvertwisted )all \interesting" onta t invariants vanish:HSFT� (M; �) = f0g ) [1℄ = 0) AT(M; �) = 0:Theorem.Algebrai k-torsion ) not �llable.notemptr
emptr
!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�
(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+9
Example
If no periodic orbits, then HSFT∗ (M, ξ) = R[[~]].
Definition (Latschev-W.).
We say (M, ξ) has algebraic k-torsion if
[~k] = 0 ∈ HSFT∗ (M, ξ).
AT(M, ξ) := sup{
k∣
∣
∣ [~k−1] 6= 0 ∈ HSFT∗ (M, ξ)
}
ExampleOvertwisted )all \interesting" onta t invariants vanish:HSFT� (M; �) = f0g ) [1℄ = 0) AT(M; �) = 0:Theorem.Algebrai k-torsion ) not �llable.notemptr
emptr
!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�
(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+9
Example
If no periodic orbits, then HSFT∗ (M, ξ) = R[[~]].
Definition (Latschev-W.).
We say (M, ξ) has algebraic k-torsion if
[~k] = 0 ∈ HSFT∗ (M, ξ).
AT(M, ξ) := sup{
k∣
∣
∣ [~k−1] 6= 0 ∈ HSFT∗ (M, ξ)
}
Example
Overtwisted ⇒
all “interesting” contact invariants vanish:
HSFT∗ (M, ξ) = {0} ⇒ [1] = 0 ⇒ AT(M, ξ) = 0.Theorem.Algebrai k-torsion ) not �llable.
notemptr
emptr
!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�
(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+9
Example
If no periodic orbits, then HSFT∗ (M, ξ) = R[[~]].
Definition (Latschev-W.).
We say (M, ξ) has algebraic k-torsion if
[~k] = 0 ∈ HSFT∗ (M, ξ).
AT(M, ξ) := sup{
k∣
∣
∣ [~k−1] 6= 0 ∈ HSFT∗ (M, ξ)
}
Example
Overtwisted ⇒
all “interesting” contact invariants vanish:
HSFT∗ (M, ξ) = {0} ⇒ [1] = 0 ⇒ AT(M, ξ) = 0.
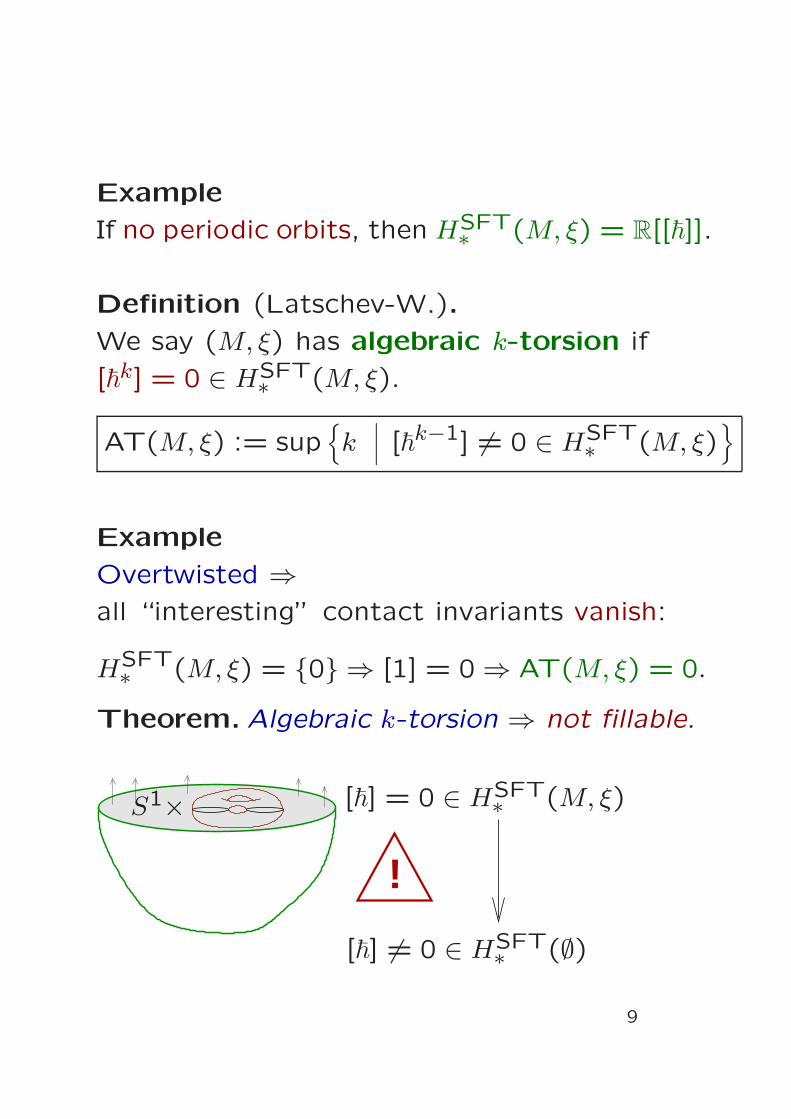
Theorem.Algebraic k-torsion ⇒ not fillable.
notemptr
emptr
!
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)
S1�
(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+9
Example
If no periodic orbits, then HSFT∗ (M, ξ) = R[[~]].
Definition (Latschev-W.).
We say (M, ξ) has algebraic k-torsion if
[~k] = 0 ∈ HSFT∗ (M, ξ).
AT(M, ξ) := sup{
k∣
∣
∣ [~k−1] 6= 0 ∈ HSFT∗ (M, ξ)
}
Example
Overtwisted ⇒
all “interesting” contact invariants vanish:
HSFT∗ (M, ξ) = {0} ⇒ [1] = 0 ⇒ AT(M, ξ) = 0.
Theorem.Algebraic k-torsion ⇒ not fillable.
!
S1× [~] = 0 ∈ HSFT∗ (M, ξ)
[~] 6= 0 ∈ HSFT∗ (∅)
1
9
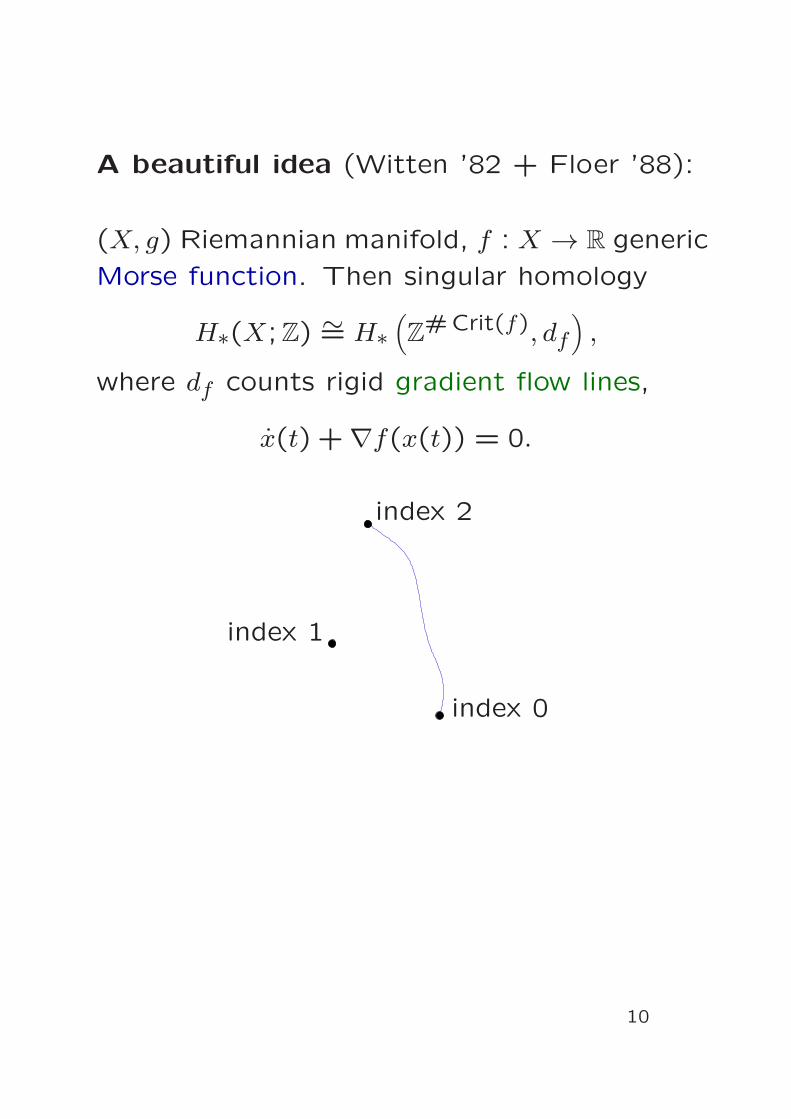
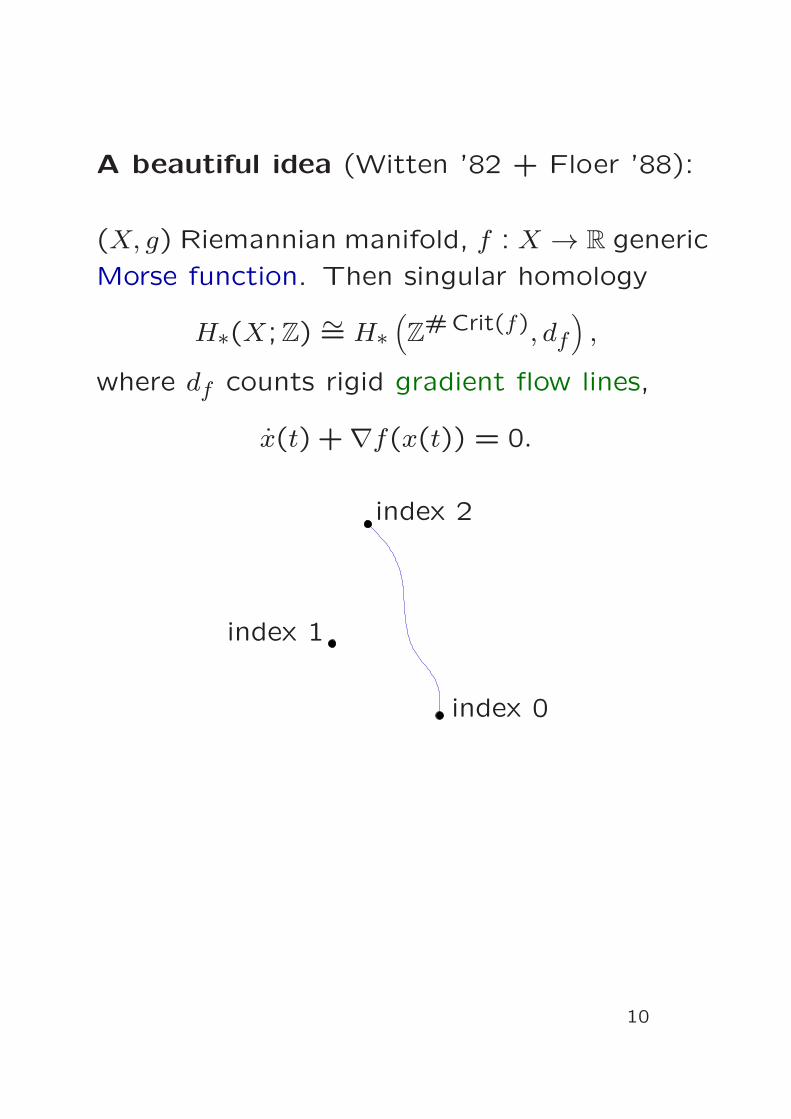
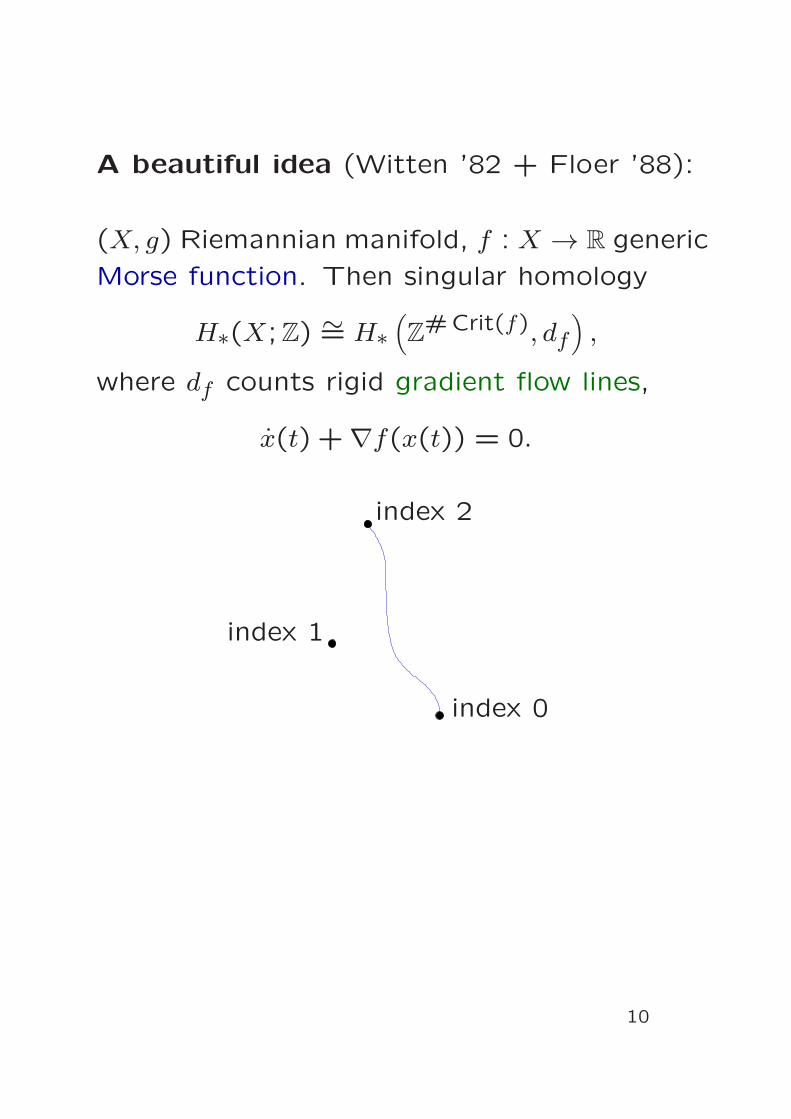
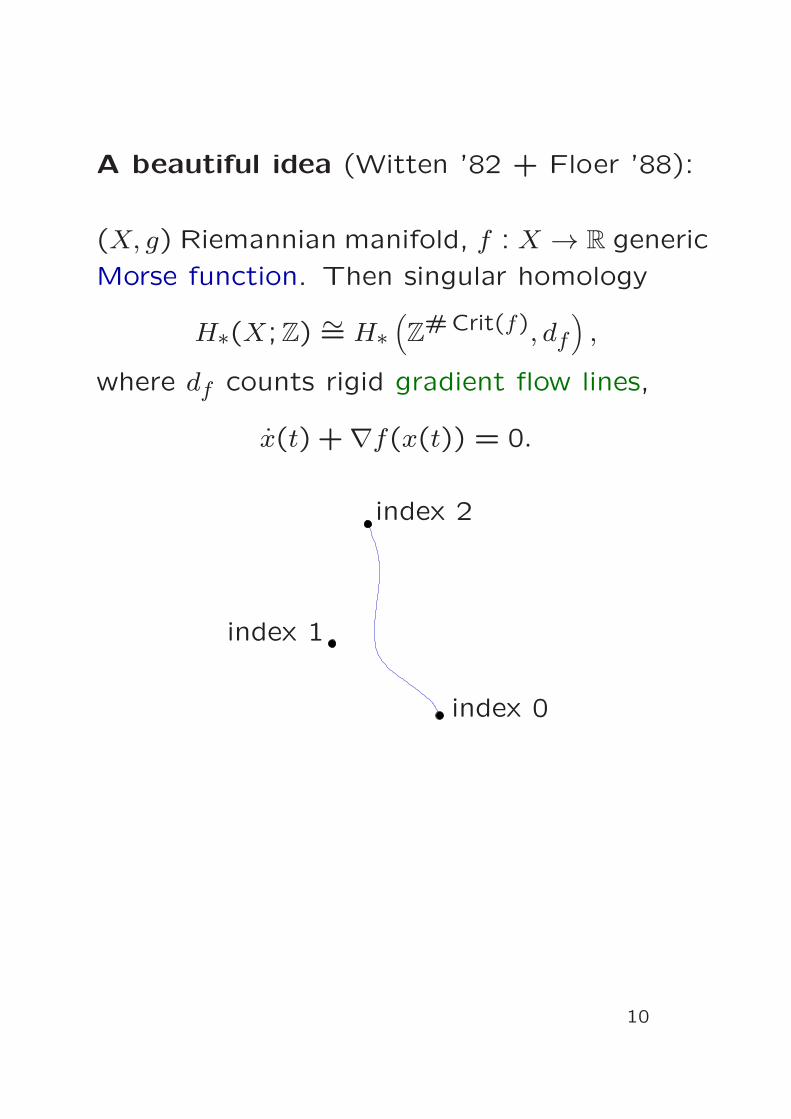
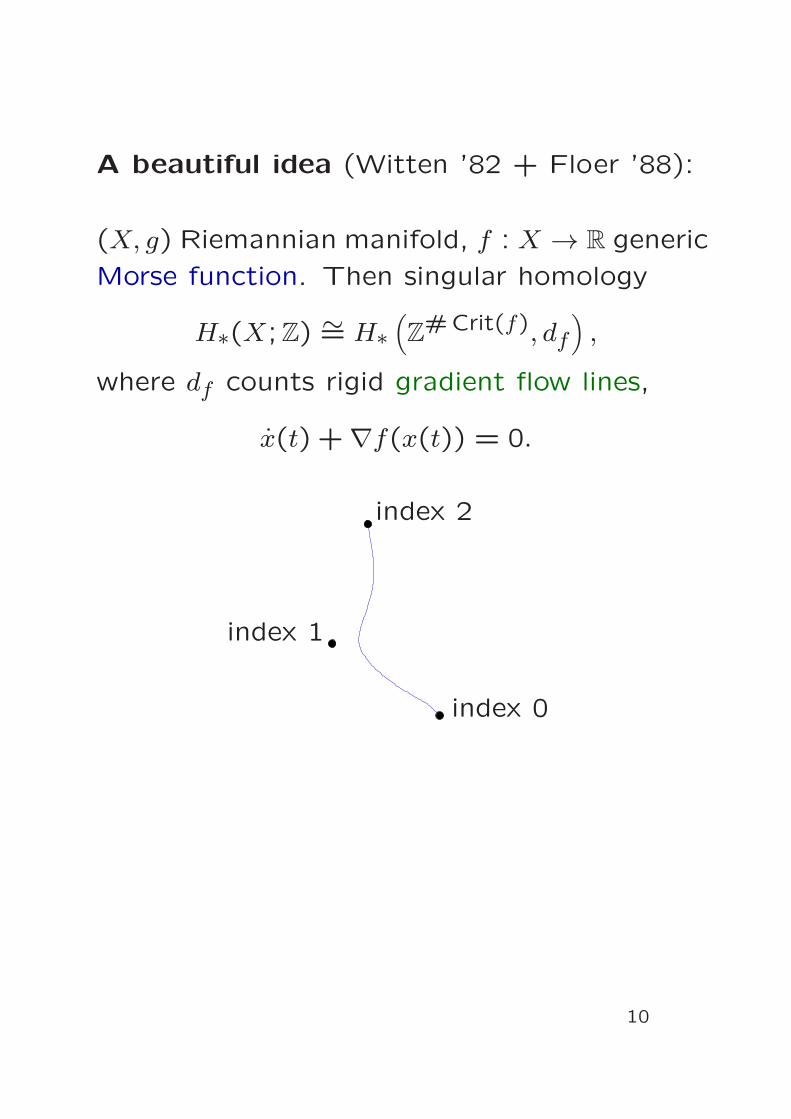
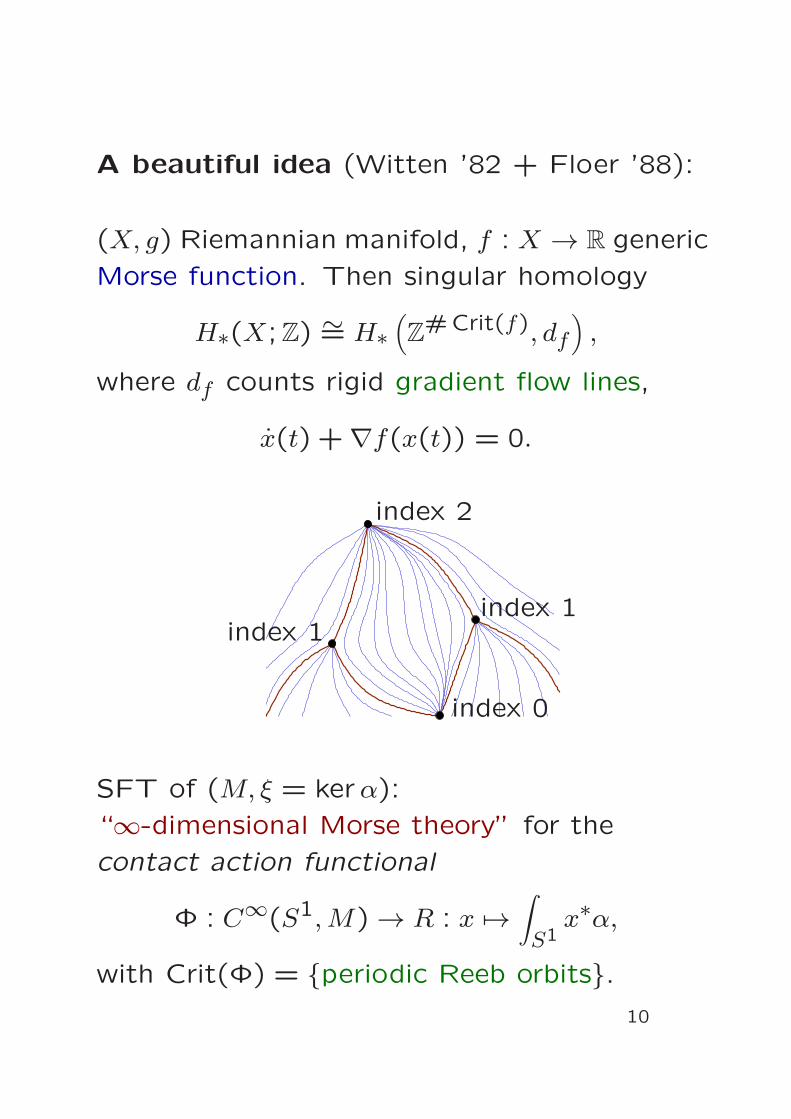
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)S1�(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0
index 0index 1index 2
�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+SFT of (M; � = ker�):\1-dimensional Morse theory" for the onta t a tion fun tional� : C1(S1;M)! R : x 7! ZS1 x��;with Crit(�) = fperiodi Reeb orbitsg.10
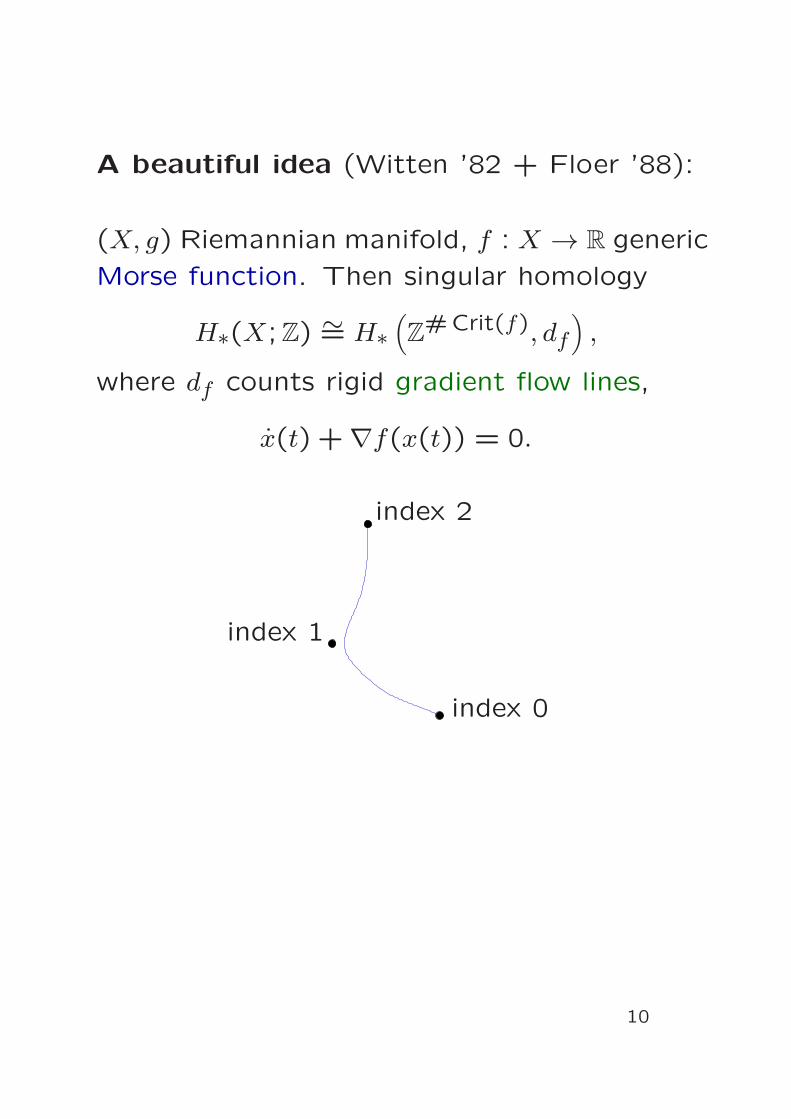
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
index 0
index 1
index 2
SFT of (M; � = ker�):\1-dimensional Morse theory" for the onta t a tion fun tional� : C1(S1;M)! R : x 7! ZS1 x��;with Crit(�) = fperiodi Reeb orbitsg.10
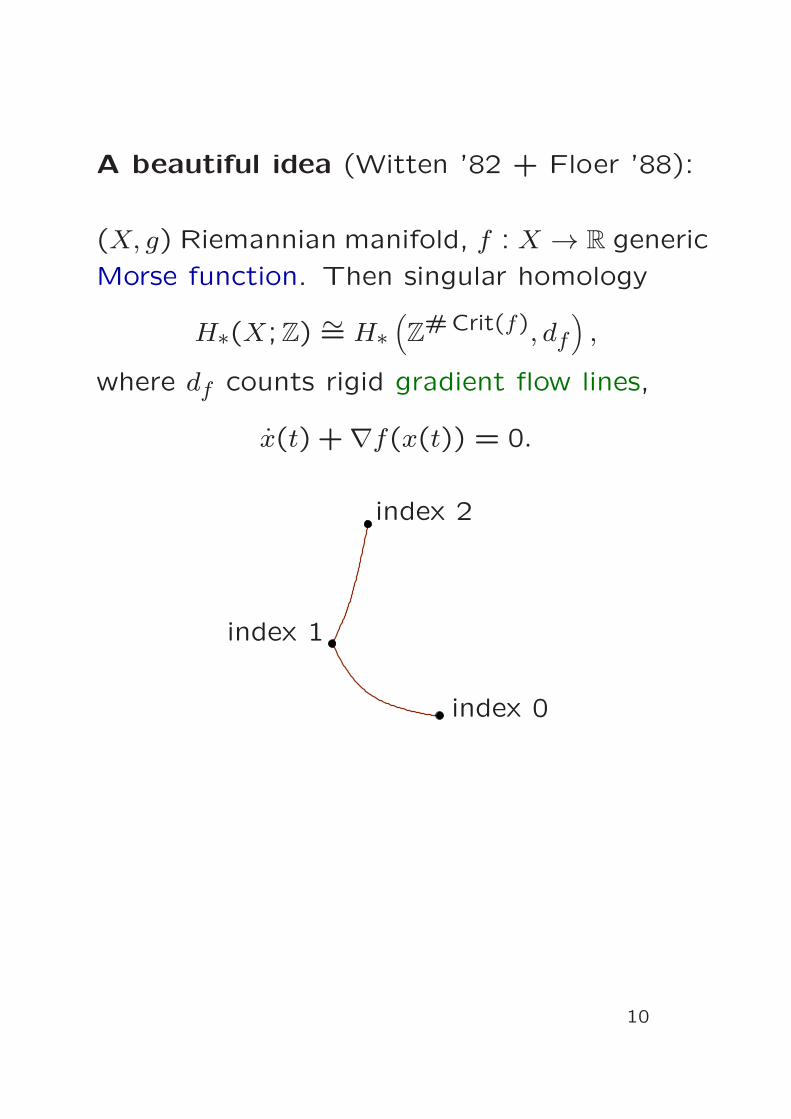
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
index 0
index 1
index 2
SFT of (M; � = ker�):\1-dimensional Morse theory" for the onta t a tion fun tional� : C1(S1;M)! R : x 7! ZS1 x��;with Crit(�) = fperiodi Reeb orbitsg.10
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
index 0
index 1
index 2
SFT of (M; � = ker�):\1-dimensional Morse theory" for the onta t a tion fun tional� : C1(S1;M)! R : x 7! ZS1 x��;with Crit(�) = fperiodi Reeb orbitsg.10
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
index 0
index 1
index 2
SFT of (M; � = ker�):\1-dimensional Morse theory" for the onta t a tion fun tional� : C1(S1;M)! R : x 7! ZS1 x��;with Crit(�) = fperiodi Reeb orbitsg.10
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
index 0
index 1
index 2
SFT of (M; � = ker�):\1-dimensional Morse theory" for the onta t a tion fun tional� : C1(S1;M)! R : x 7! ZS1 x��;with Crit(�) = fperiodi Reeb orbitsg.10
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
index 0
index 1
index 2
SFT of (M; � = ker�):\1-dimensional Morse theory" for the onta t a tion fun tional� : C1(S1;M)! R : x 7! ZS1 x��;with Crit(�) = fperiodi Reeb orbitsg.10
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
index 0
index 1
index 2
SFT of (M; � = ker�):\1-dimensional Morse theory" for the onta t a tion fun tional� : C1(S1;M)! R : x 7! ZS1 x��;with Crit(�) = fperiodi Reeb orbitsg.10
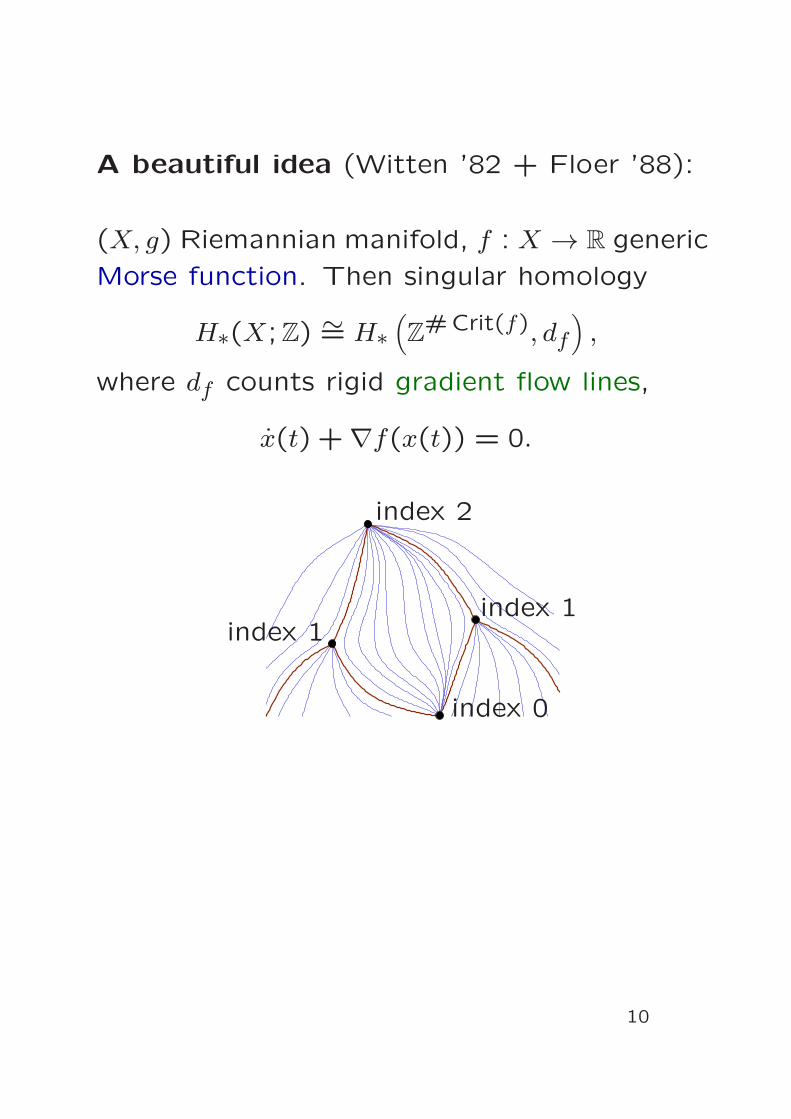
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
index 0
index 1index 1
index 2
SFT of (M; � = ker�):\1-dimensional Morse theory" for the onta t a tion fun tional� : C1(S1;M)! R : x 7! ZS1 x��;with Crit(�) = fperiodi Reeb orbitsg.10
A beautiful idea (Witten ’82 + Floer ’88):
(X, g) Riemannian manifold, f : X → R generic
Morse function. Then singular homology
H∗(X;Z) ∼= H∗
(
Z#Crit(f), df
)
,
where df counts rigid gradient flow lines,
x(t) +∇f(x(t)) = 0.
index 0
index 1index 1
index 2
SFT of (M, ξ = kerα):
“∞-dimensional Morse theory” for the
contact action functional
Φ : C∞(S1,M) → R : x 7→∫
S1x∗α,
with Crit(Φ) = {periodic Reeb orbits}.
10
Gradient flow:
Consider 1-parameter families of loops
{us ∈ C∞(S1,M)}s∈R with
∂sus +∇Φ(us) = 0.! ylinders u : R�S1! R�M satisfying thenonlinear Cau hy-Riemann equation�su+ J(u) �tu = 0for an almost omplex stru ture J on R�M .For a symple ti obordism W and Riemannsurfa e �, onsider J-holomorphi urvesu : � n fz1; : : : ; zng !Wapproa hing Reeb orbits at the pun tures.
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)S1�(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+11

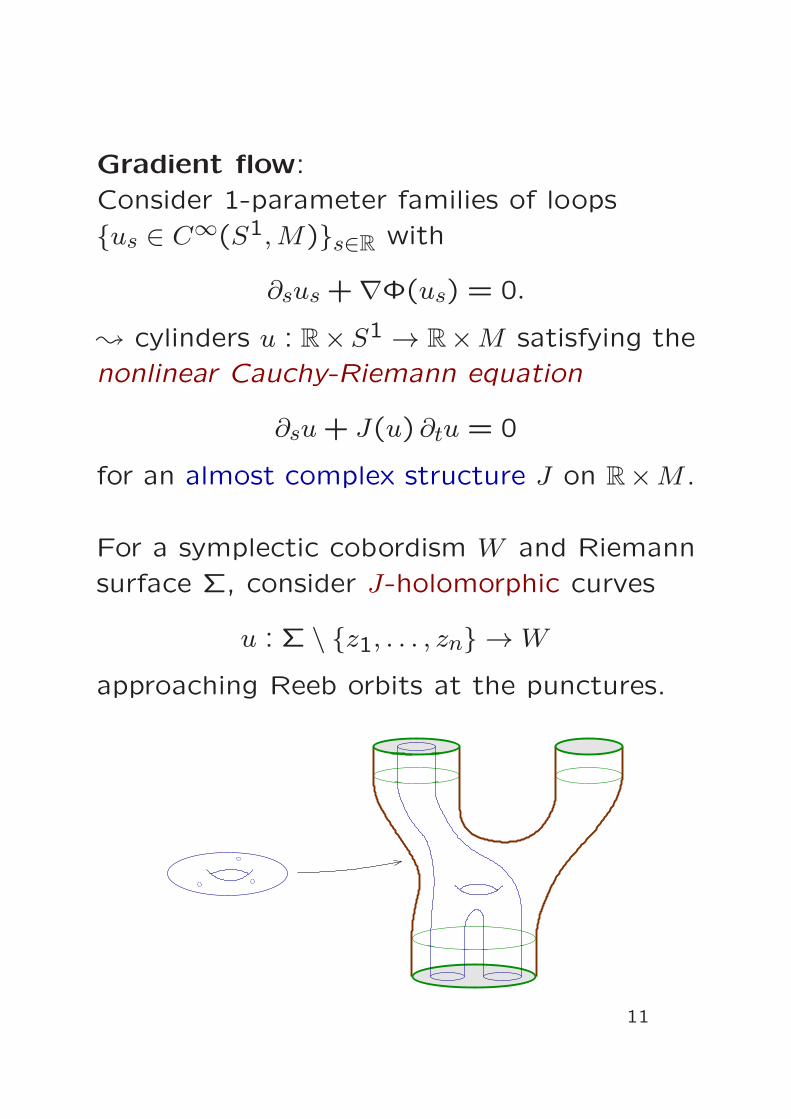
Gradient flow:
Consider 1-parameter families of loops
{us ∈ C∞(S1,M)}s∈R with
∂sus +∇Φ(us) = 0.
; cylinders u : R×S1 → R×M satisfying the
nonlinear Cauchy-Riemann equation
∂su+ J(u) ∂tu = 0
for an almost complex structure J on R×M .For a symple ti obordism W and Riemannsurfa e �, onsider J-holomorphi urvesu : � n fz1; : : : ; zng !Wapproa hing Reeb orbits at the pun tures.
PSfrag repla ementsS1���WW(M+; �+)(M�; ��)S1�(M1; �1)(M2; �2)[ ℄ = 0 2 HSFT� (M; �)[ ℄ 6= 0 2 HSFT� (;)AT =1AT � 0AT � 1AT � 24-dimensional2-handle�[0;1℄�MMM 0index 0index 1index 2�M� � � 1 2 k�+���0[0;1)�M+(�1;0℄�M�W�M��M+11
Gradient flow:
Consider 1-parameter families of loops
{us ∈ C∞(S1,M)}s∈R with
∂sus +∇Φ(us) = 0.
; cylinders u : R×S1 → R×M satisfying the
nonlinear Cauchy-Riemann equation
∂su+ J(u) ∂tu = 0
for an almost complex structure J on R×M .
For a symplectic cobordism W and Riemann
surface Σ, consider J-holomorphic curves
u : Σ \ {z1, . . . , zn} → W
approaching Reeb orbits at the punctures.
AT
11
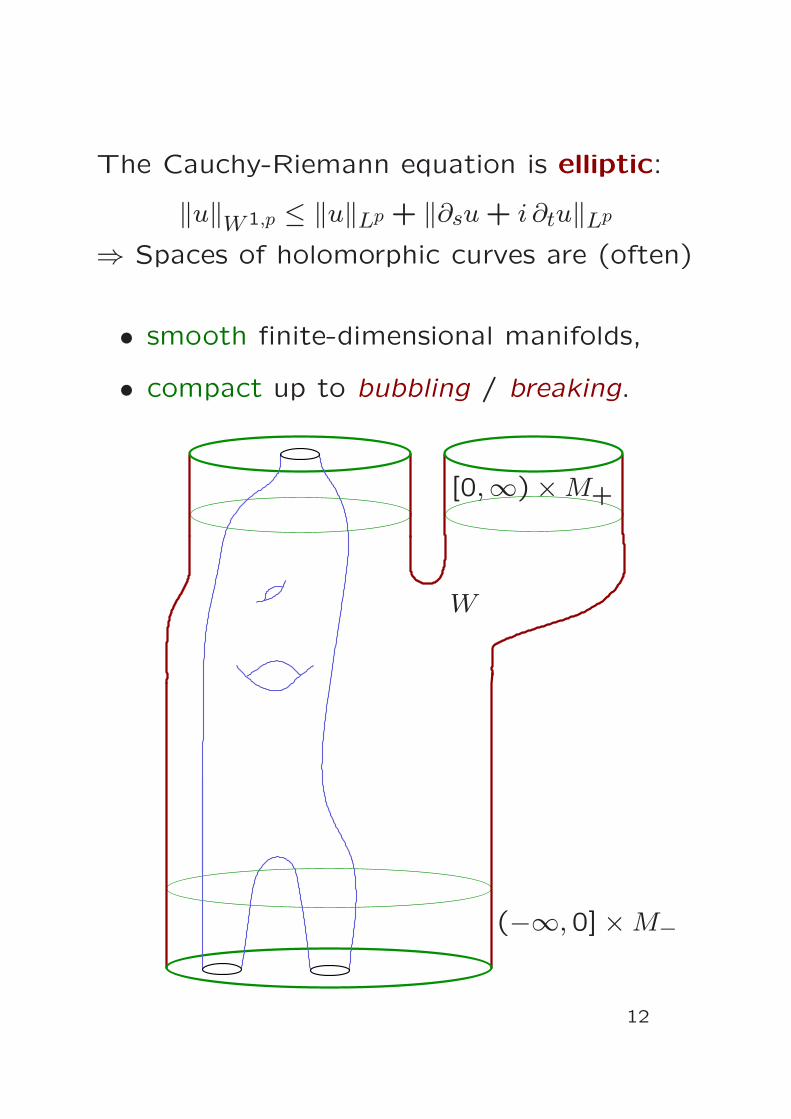
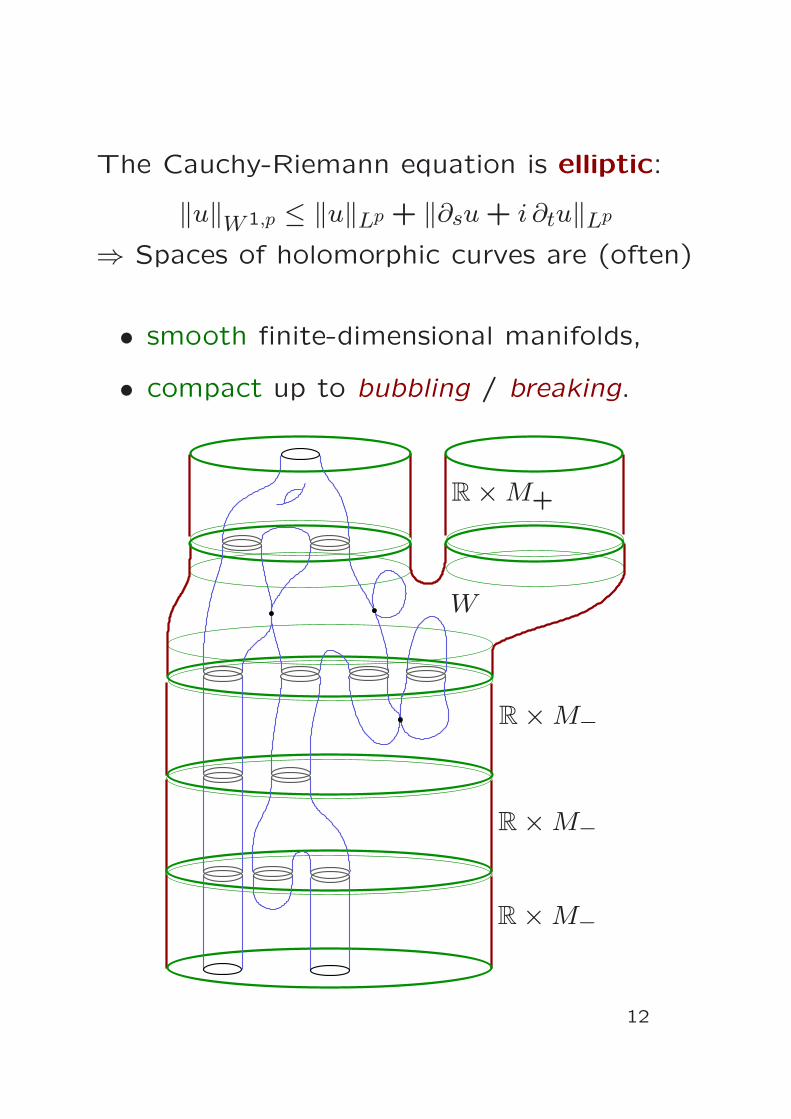
The Cauchy-Riemann equation is elliptic:
‖u‖W1,p ≤ ‖u‖Lp + ‖∂su+ i ∂tu‖Lp
⇒ Spaces of holomorphic curves are (often)
• smooth finite-dimensional manifolds,
• compact up to bubbling / breaking.
AT
12
The Cauchy-Riemann equation is elliptic:
‖u‖W1,p ≤ ‖u‖Lp + ‖∂su+ i ∂tu‖Lp
⇒ Spaces of holomorphic curves are (often)
• smooth finite-dimensional manifolds,
• compact up to bubbling / breaking.
AT
[0,∞)×M+
(−∞,0]×M−
W
12
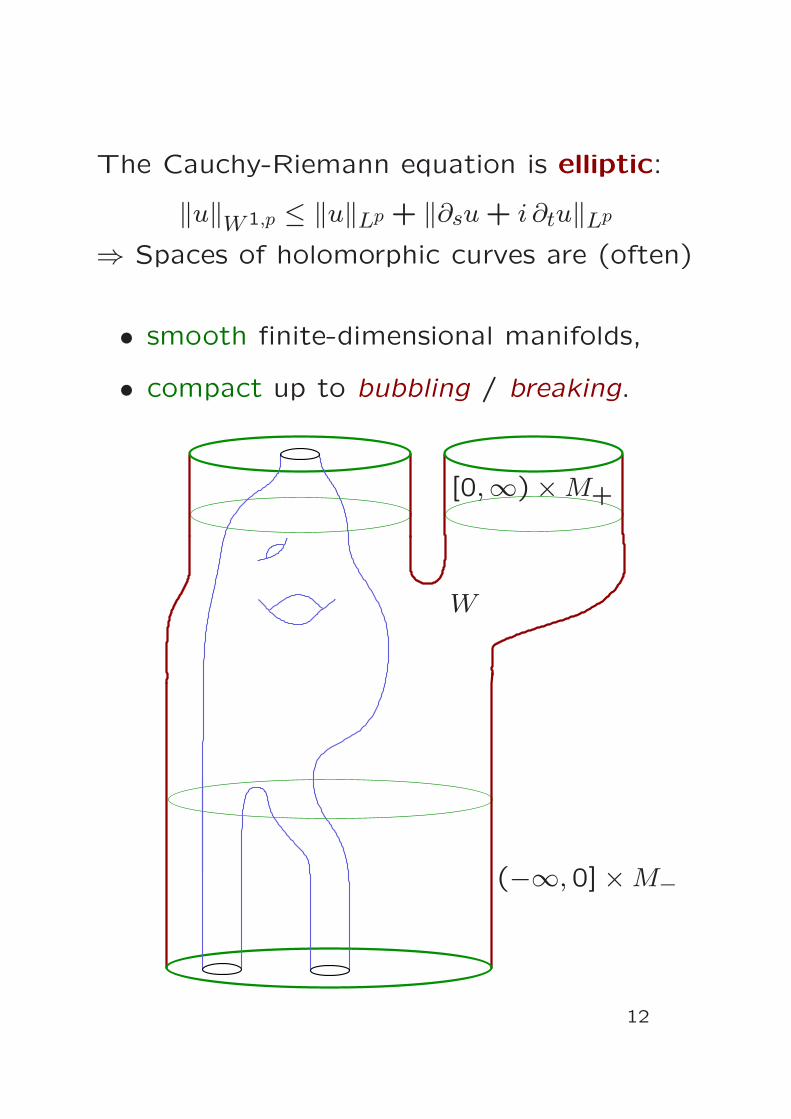
The Cauchy-Riemann equation is elliptic:
‖u‖W1,p ≤ ‖u‖Lp + ‖∂su+ i ∂tu‖Lp
⇒ Spaces of holomorphic curves are (often)
• smooth finite-dimensional manifolds,
• compact up to bubbling / breaking.
AT
[0,∞)×M+
(−∞,0]×M−
W
12
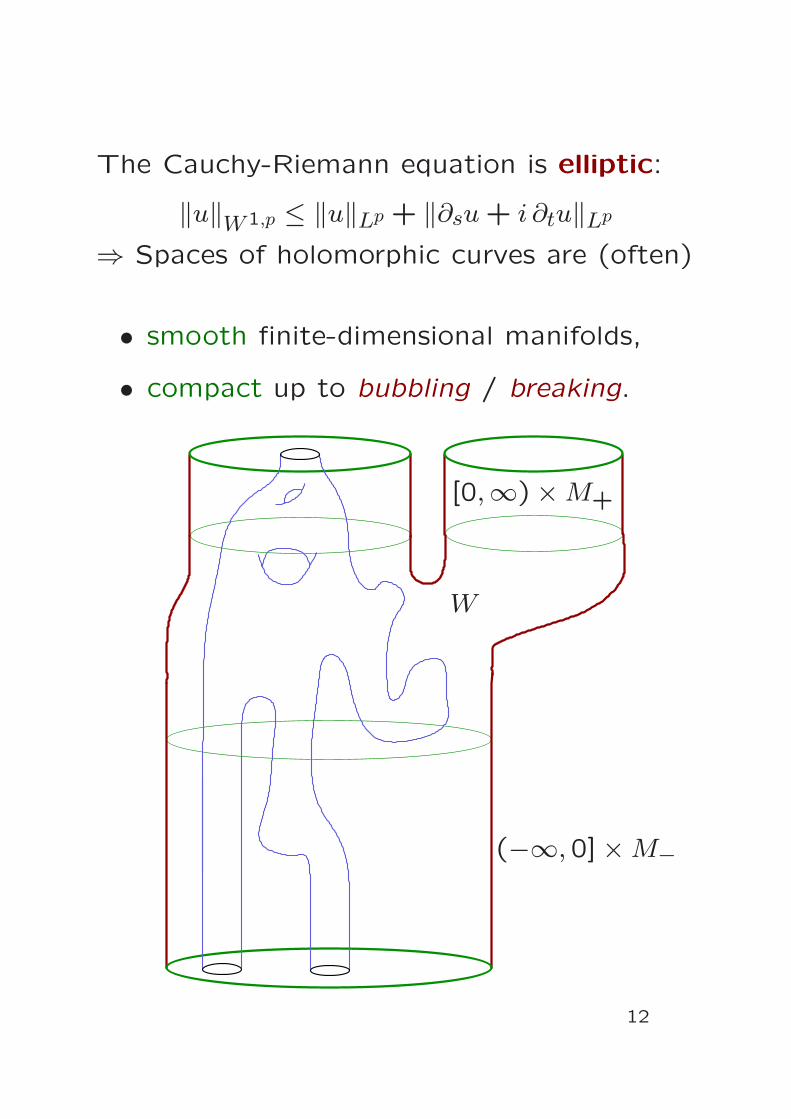
The Cauchy-Riemann equation is elliptic:
‖u‖W1,p ≤ ‖u‖Lp + ‖∂su+ i ∂tu‖Lp
⇒ Spaces of holomorphic curves are (often)
• smooth finite-dimensional manifolds,
• compact up to bubbling / breaking.
AT
[0,∞)×M+
(−∞,0]×M−
W
12
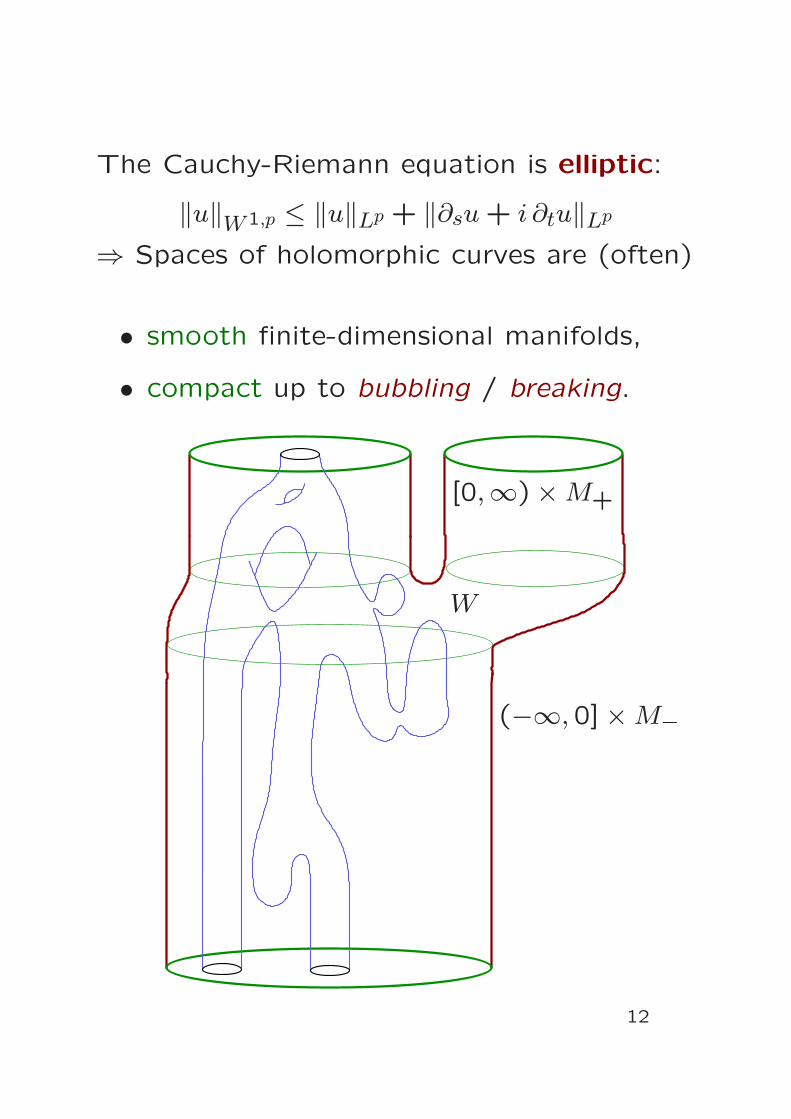
The Cauchy-Riemann equation is elliptic:
‖u‖W1,p ≤ ‖u‖Lp + ‖∂su+ i ∂tu‖Lp
⇒ Spaces of holomorphic curves are (often)
• smooth finite-dimensional manifolds,
• compact up to bubbling / breaking.
AT
[0,∞)×M+
(−∞,0]×M−
W
12
The Cauchy-Riemann equation is elliptic:
‖u‖W1,p ≤ ‖u‖Lp + ‖∂su+ i ∂tu‖Lp
⇒ Spaces of holomorphic curves are (often)
• smooth finite-dimensional manifolds,
• compact up to bubbling / breaking.
AT
W
R×M−
R×M−
R×M−
R×M+
12
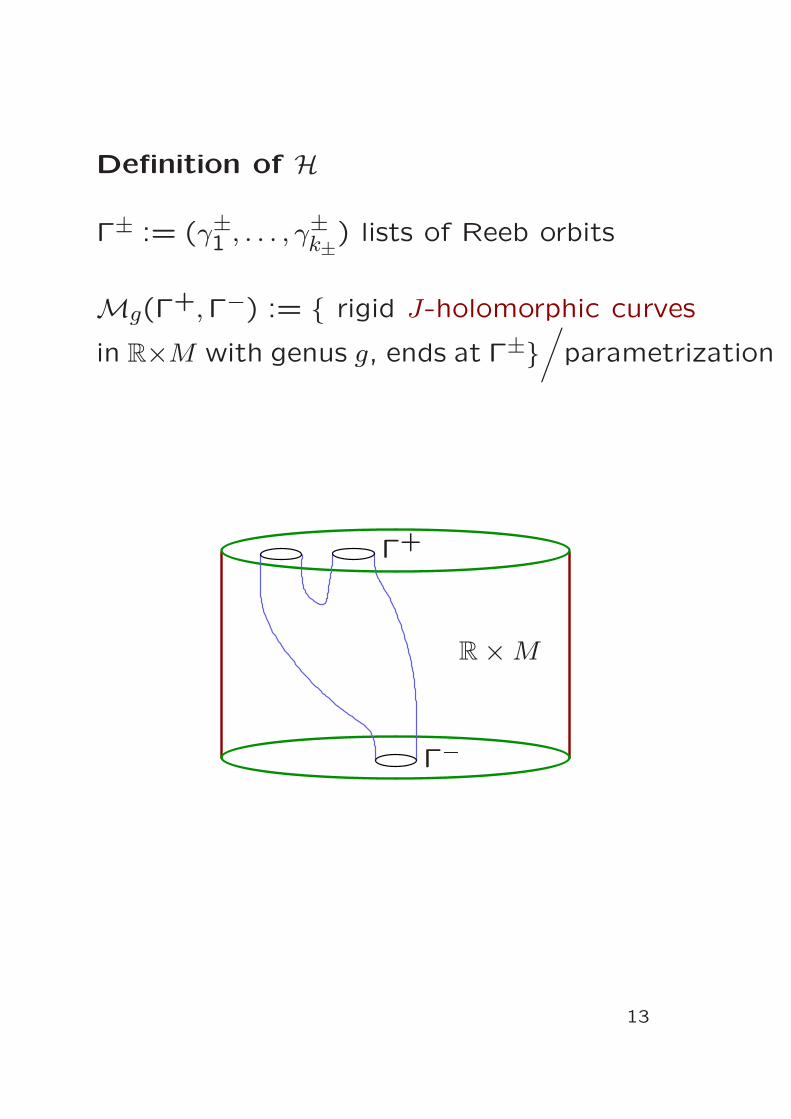
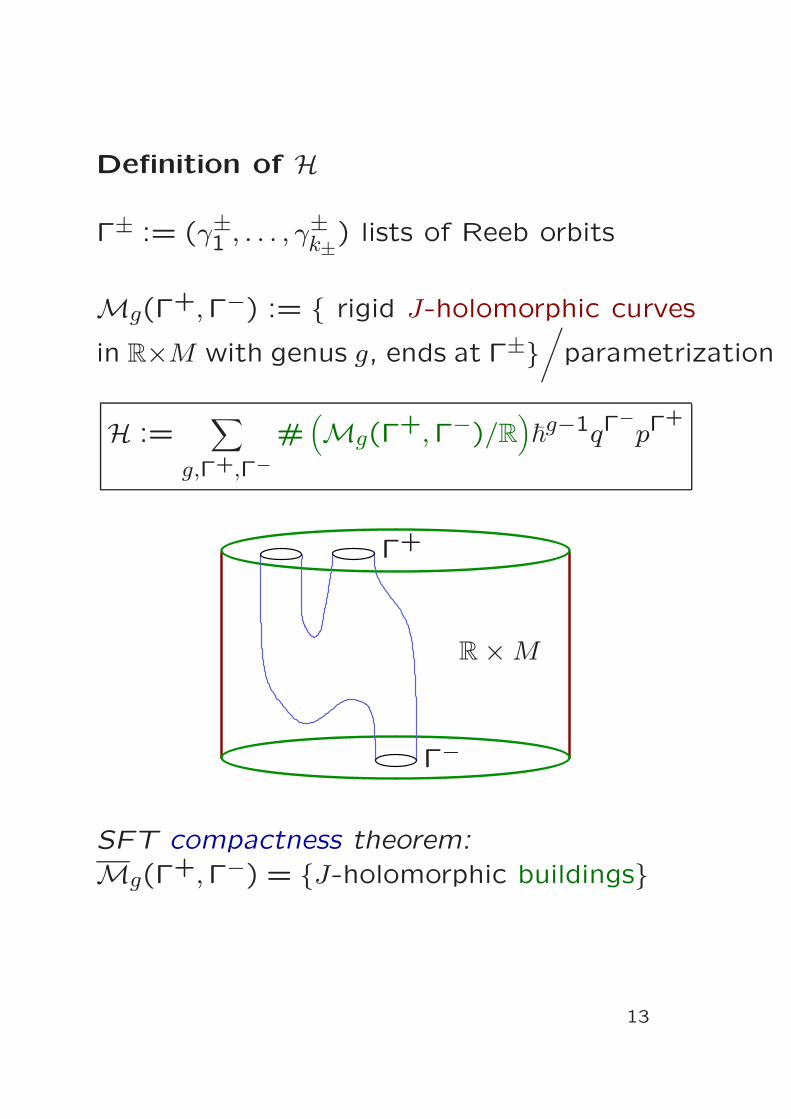
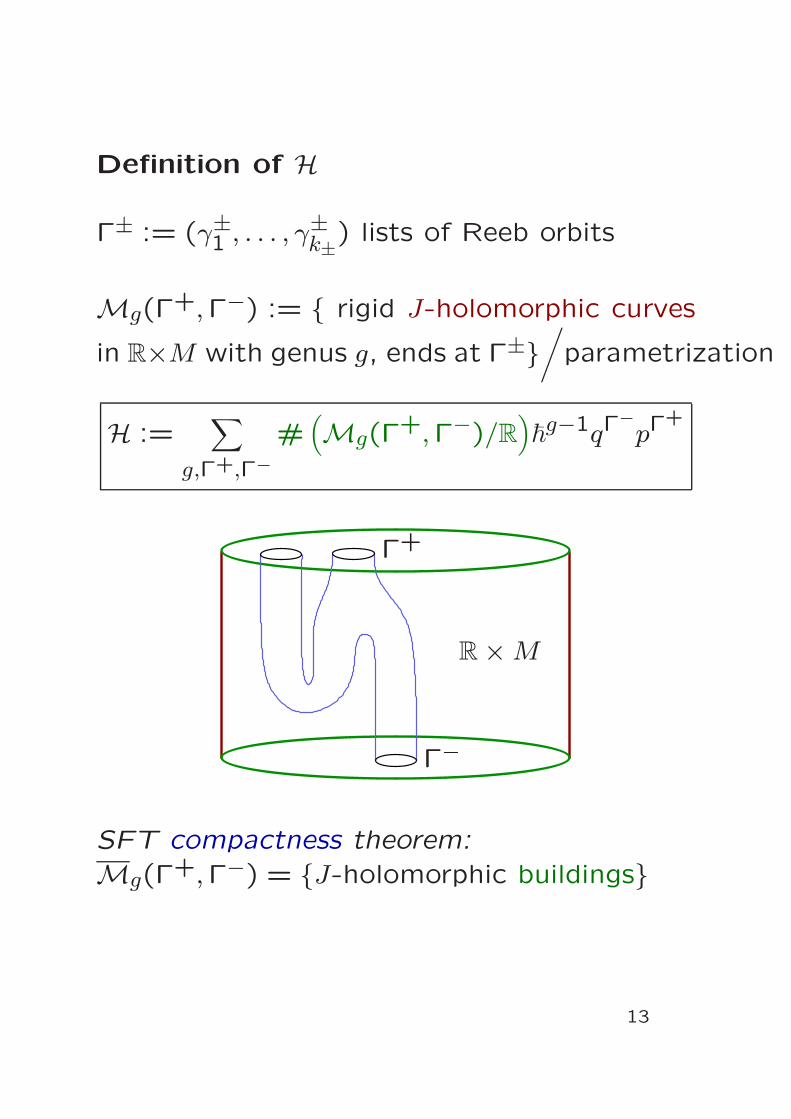
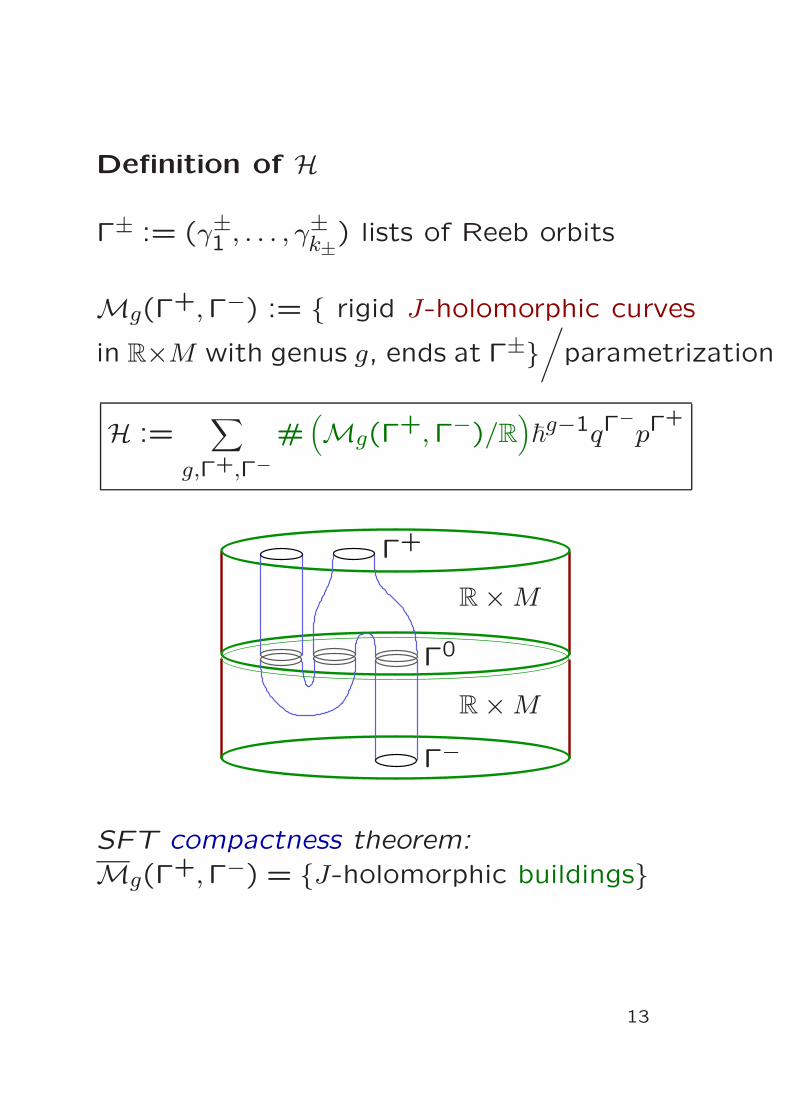
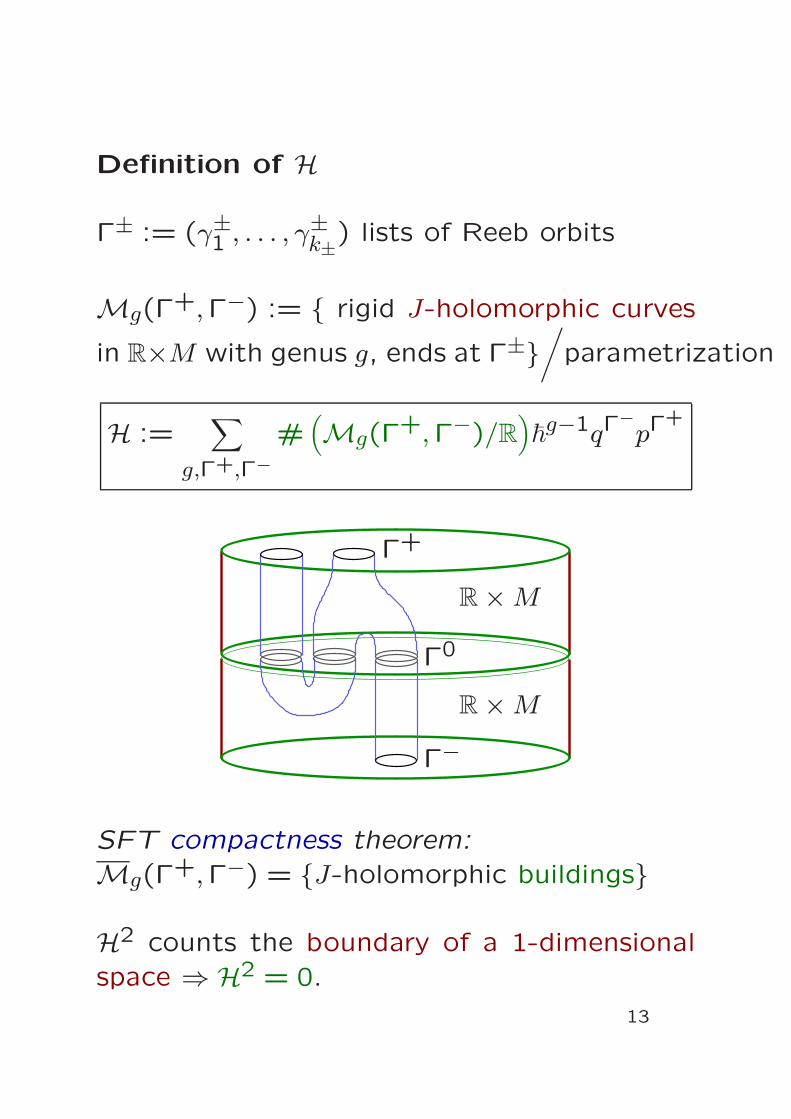
Definition of H
Γ± := (γ±1 , . . . , γ±k±) lists of Reeb orbits
Mg(Γ+,Γ−) := { rigid J-holomorphic curves
in R×M with genus g, ends at Γ±}/
parametrization
H := Xg;�+;��# �Mg(�+;��)=R�hg�1q��p�+
[0
R×M
Γ+
Γ−
SFT ompa tness theorem:Mg(�+;��) = fJ-holomorphi buildingsgH2 ounts the boundary of a 1-dimensionalspa e )H2 = 0.13
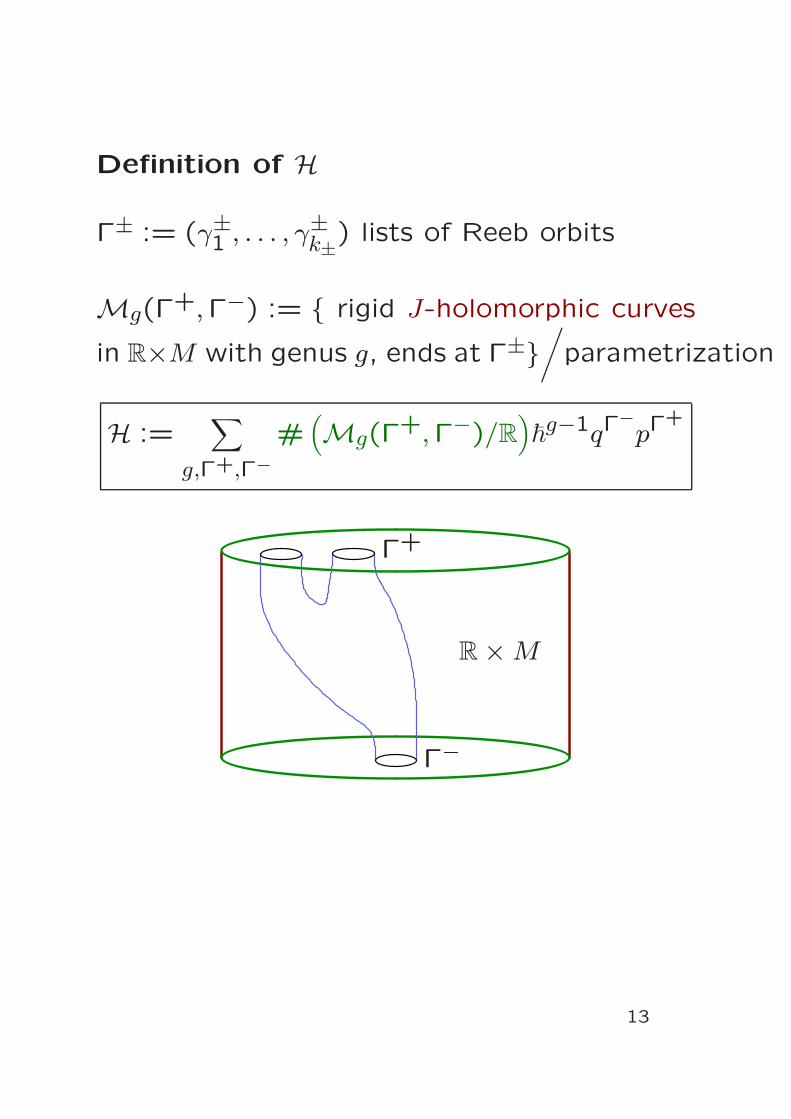
Definition of H
Γ± := (γ±1 , . . . , γ±k±) lists of Reeb orbits
Mg(Γ+,Γ−) := { rigid J-holomorphic curves
in R×M with genus g, ends at Γ±}/
parametrization
H :=∑
g,Γ+,Γ−
#(
Mg(Γ+,Γ−)/R
)
~g−1qΓ
−pΓ
+
[0
R×M
Γ+
Γ−
SFT ompa tness theorem:Mg(�+;��) = fJ-holomorphi buildingsgH2 ounts the boundary of a 1-dimensionalspa e )H2 = 0.13
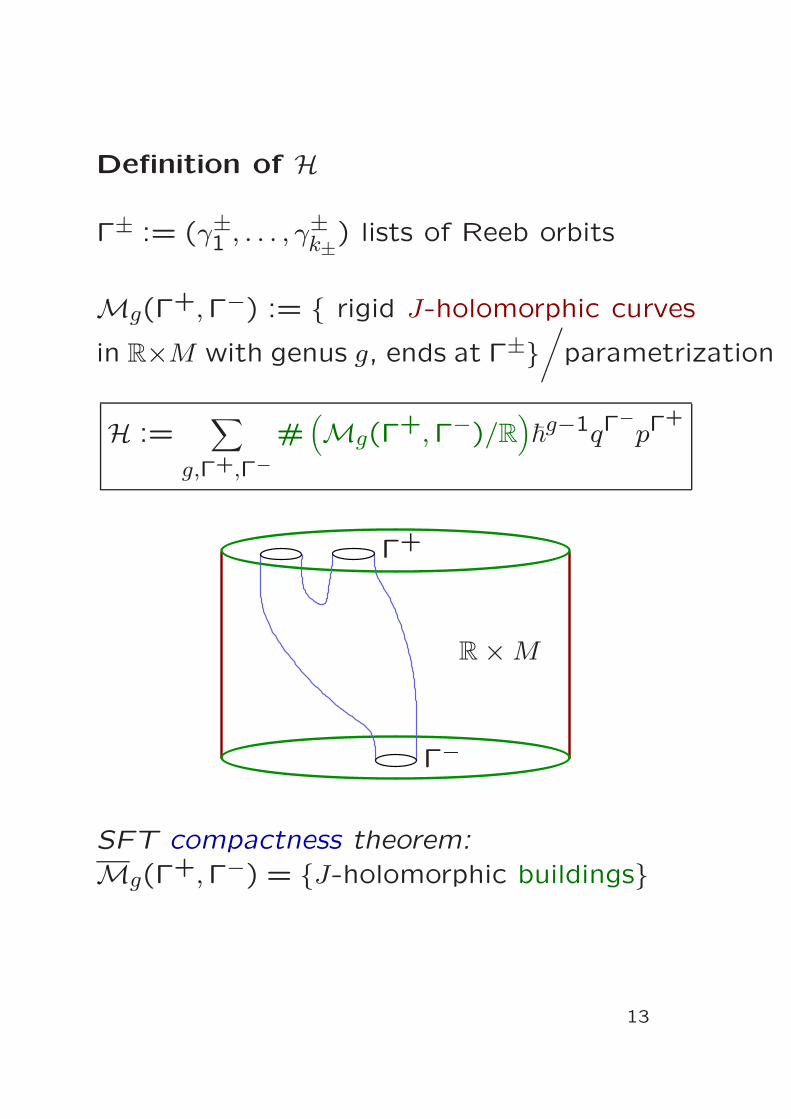
Definition of H
Γ± := (γ±1 , . . . , γ±k±) lists of Reeb orbits
Mg(Γ+,Γ−) := { rigid J-holomorphic curves
in R×M with genus g, ends at Γ±}/
parametrization
H :=∑
g,Γ+,Γ−
#(
Mg(Γ+,Γ−)/R
)
~g−1qΓ
−pΓ
+
[0
R×M
Γ+
Γ−
SFT compactness theorem:
Mg(Γ+,Γ−) = {J-holomorphic buildings}H2 ounts the boundary of a 1-dimensionalspa e )H2 = 0.13
Definition of H
Γ± := (γ±1 , . . . , γ±k±) lists of Reeb orbits
Mg(Γ+,Γ−) := { rigid J-holomorphic curves
in R×M with genus g, ends at Γ±}/
parametrization
H :=∑
g,Γ+,Γ−
#(
Mg(Γ+,Γ−)/R
)
~g−1qΓ
−pΓ
+
[0
R×M
Γ+
Γ−
SFT compactness theorem:
Mg(Γ+,Γ−) = {J-holomorphic buildings}H2 ounts the boundary of a 1-dimensionalspa e )H2 = 0.13
Definition of H
Γ± := (γ±1 , . . . , γ±k±) lists of Reeb orbits
Mg(Γ+,Γ−) := { rigid J-holomorphic curves
in R×M with genus g, ends at Γ±}/
parametrization
H :=∑
g,Γ+,Γ−
#(
Mg(Γ+,Γ−)/R
)
~g−1qΓ
−pΓ
+
[0
R×M
Γ+
Γ−
SFT compactness theorem:
Mg(Γ+,Γ−) = {J-holomorphic buildings}H2 ounts the boundary of a 1-dimensionalspa e )H2 = 0.13
Definition of H
Γ± := (γ±1 , . . . , γ±k±) lists of Reeb orbits
Mg(Γ+,Γ−) := { rigid J-holomorphic curves
in R×M with genus g, ends at Γ±}/
parametrization
H :=∑
g,Γ+,Γ−
#(
Mg(Γ+,Γ−)/R
)
~g−1qΓ
−pΓ
+
[0
R×M
R×M
Γ+
Γ−
Γ0
SFT compactness theorem:
Mg(Γ+,Γ−) = {J-holomorphic buildings}H2 ounts the boundary of a 1-dimensionalspa e )H2 = 0.13
Definition of H
Γ± := (γ±1 , . . . , γ±k±) lists of Reeb orbits
Mg(Γ+,Γ−) := { rigid J-holomorphic curves
in R×M with genus g, ends at Γ±}/
parametrization
H :=∑
g,Γ+,Γ−
#(
Mg(Γ+,Γ−)/R
)
~g−1qΓ
−pΓ
+
[0
R×M
R×M
Γ+
Γ−
Γ0
SFT compactness theorem:
Mg(Γ+,Γ−) = {J-holomorphic buildings}
H2 counts the boundary of a 1-dimensional
space ⇒ H2 = 0.
13
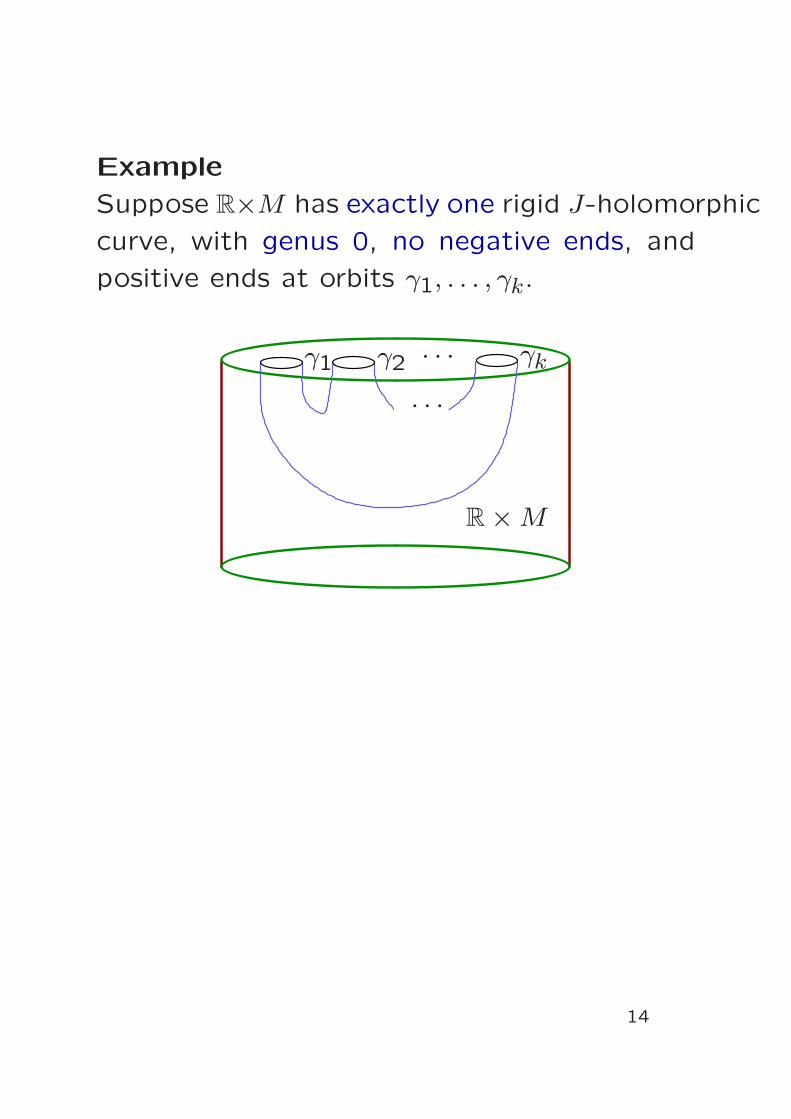
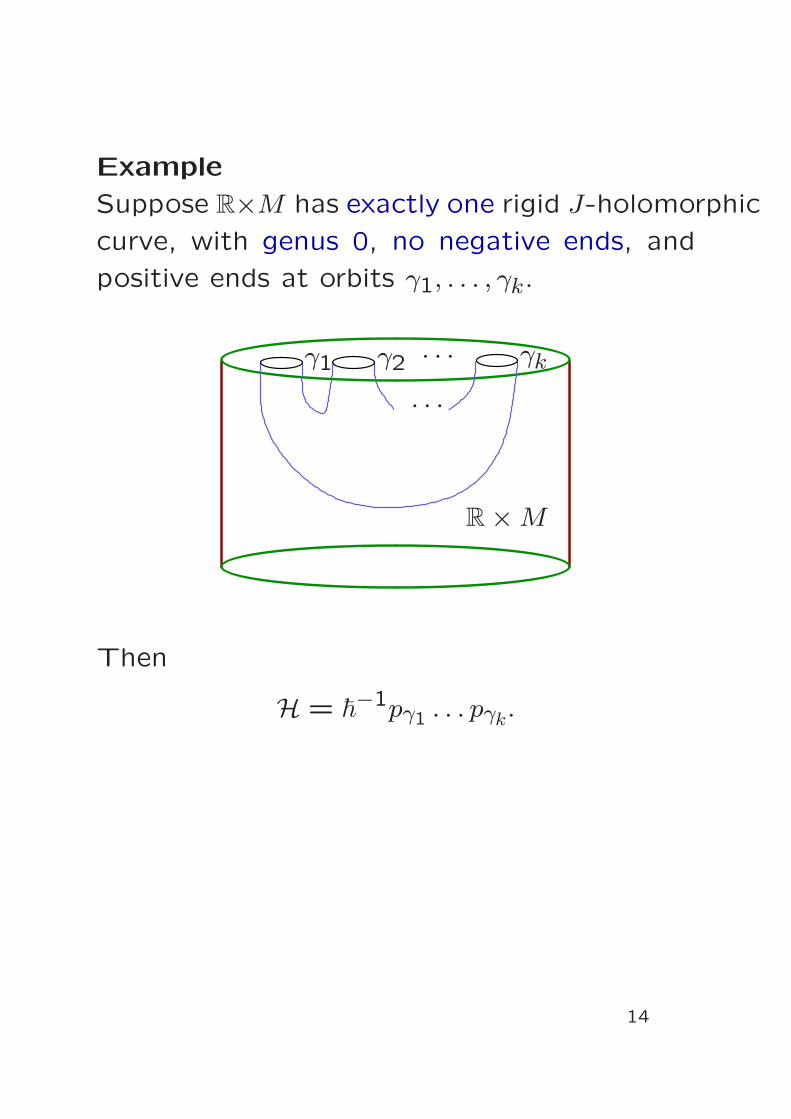
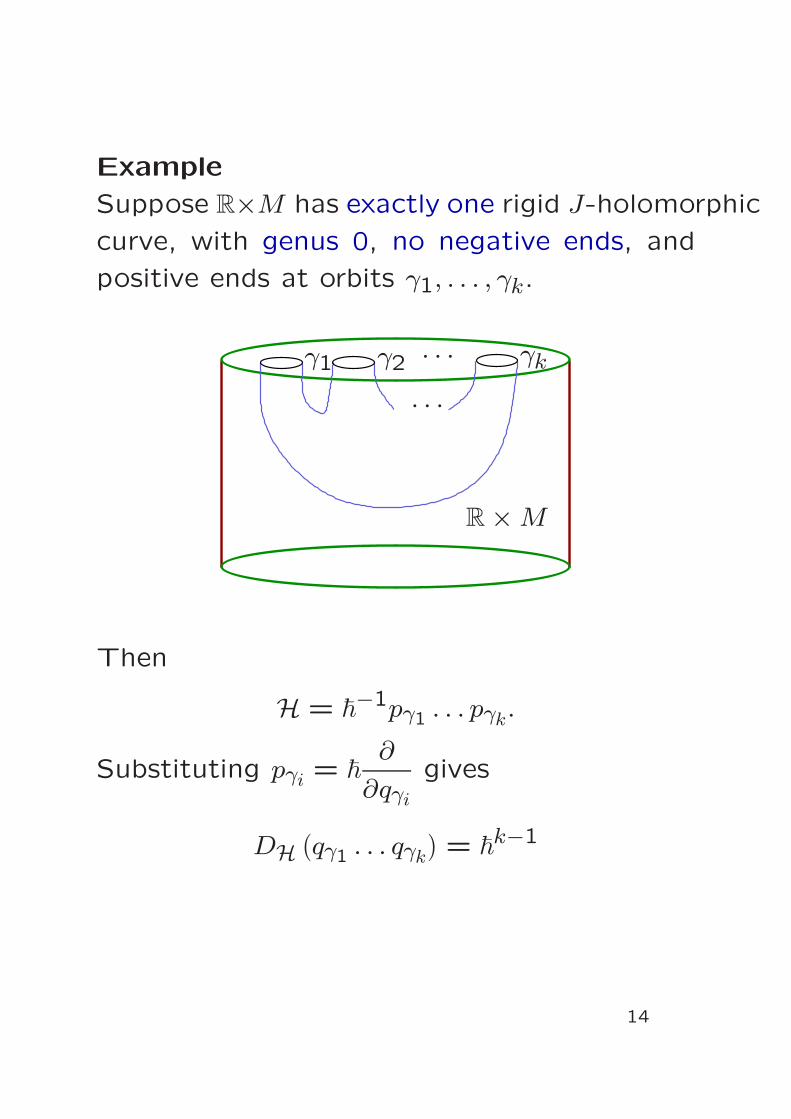
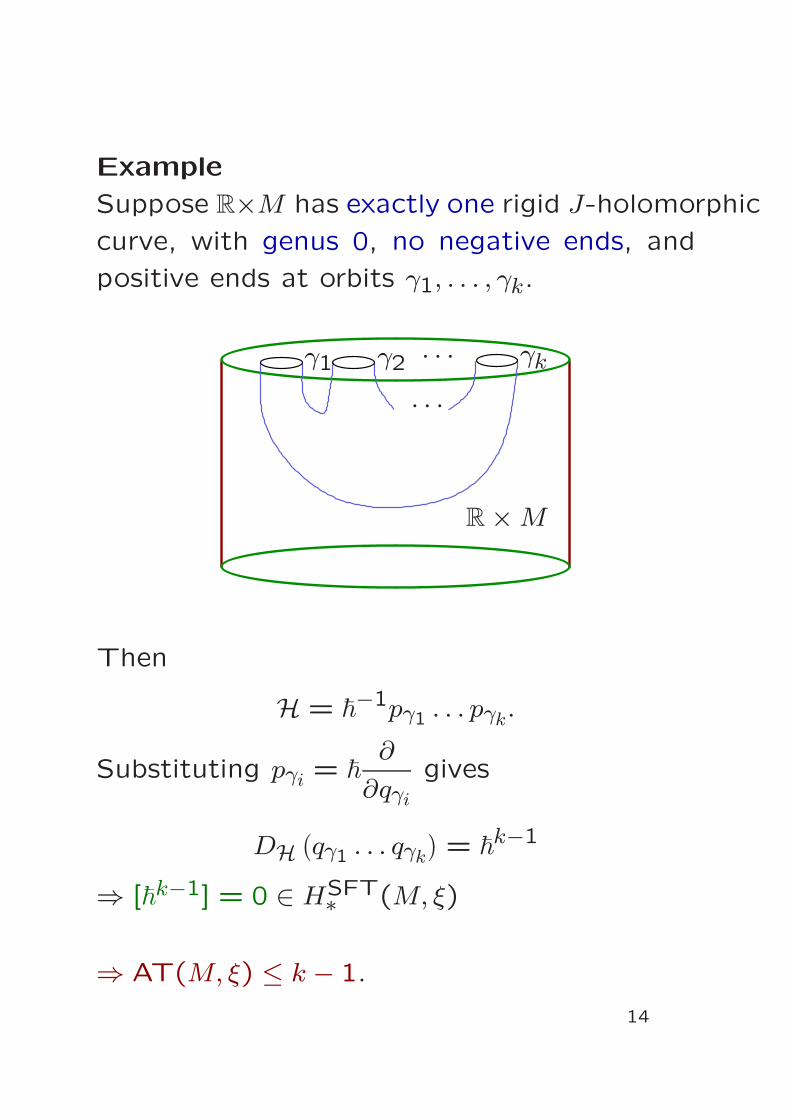
Example
Suppose R×M has exactly one rigid J-holomorphic
curve, with genus 0, no negative ends, and
positive ends at orbits γ1, . . . , γk.
R×M
· · ·
· · ·
γ1 γ2 γk
Then H = h�1p 1 : : : p k:Substituting p i = h� ��q i� givesDH �q 1 : : : q k�= hk�1) [hk�1℄ = 0 2 HSFT� (M; �)) AT(M; �) � k � 1.14
Example
Suppose R×M has exactly one rigid J-holomorphic
curve, with genus 0, no negative ends, and
positive ends at orbits γ1, . . . , γk.
R×M
· · ·
· · ·
γ1 γ2 γk
Then
H = ~−1pγ1 . . . pγk.Substituting p i = h� ��q i� givesDH �q 1 : : : q k�= hk�1) [hk�1℄ = 0 2 HSFT� (M; �)) AT(M; �) � k � 1.
14
Example
Suppose R×M has exactly one rigid J-holomorphic
curve, with genus 0, no negative ends, and
positive ends at orbits γ1, . . . , γk.
R×M
· · ·
· · ·
γ1 γ2 γk
Then
H = ~−1pγ1 . . . pγk.
Substituting pγi = ~∂
∂qγigives
DH(
qγ1 . . . qγk)
= ~k−1) [hk�1℄ = 0 2 HSFT� (M; �)) AT(M; �) � k � 1.
14
Example
Suppose R×M has exactly one rigid J-holomorphic
curve, with genus 0, no negative ends, and
positive ends at orbits γ1, . . . , γk.
R×M
· · ·
· · ·
γ1 γ2 γk
Then
H = ~−1pγ1 . . . pγk.
Substituting pγi = ~∂
∂qγigives
DH(
qγ1 . . . qγk)
= ~k−1
⇒ [~k−1] = 0 ∈ HSFT∗ (M, ξ)
⇒ AT(M, ξ) ≤ k − 1.
14
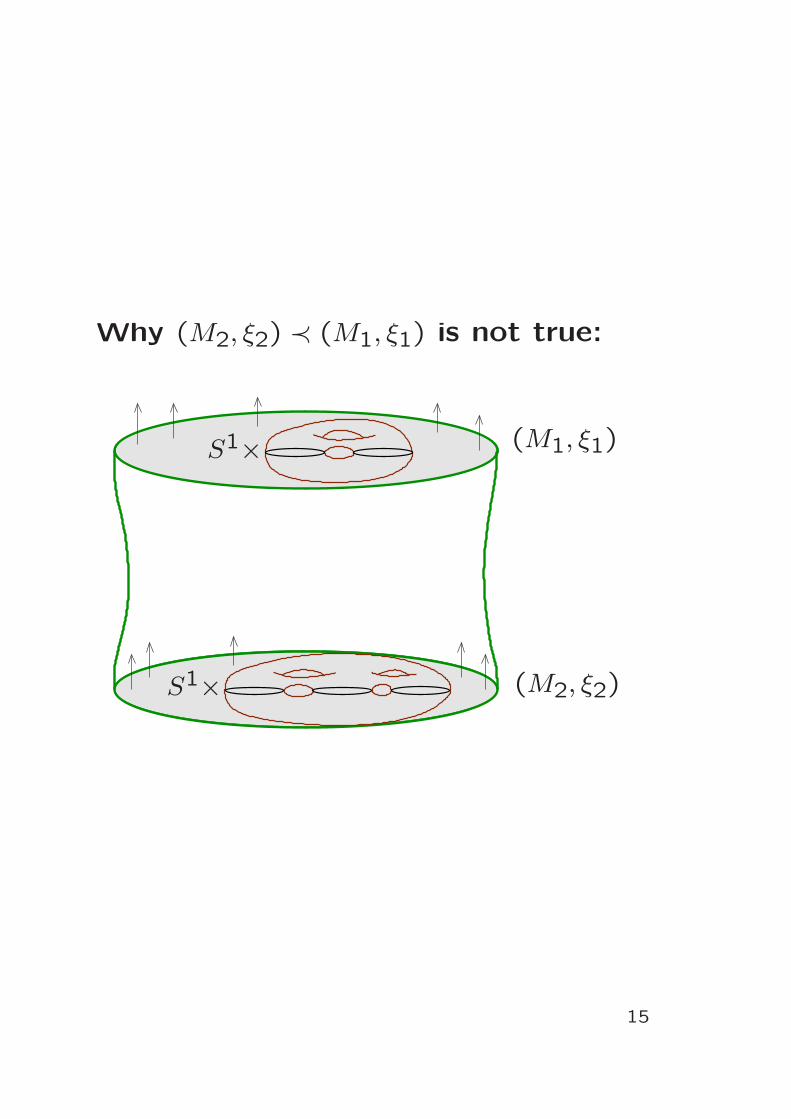
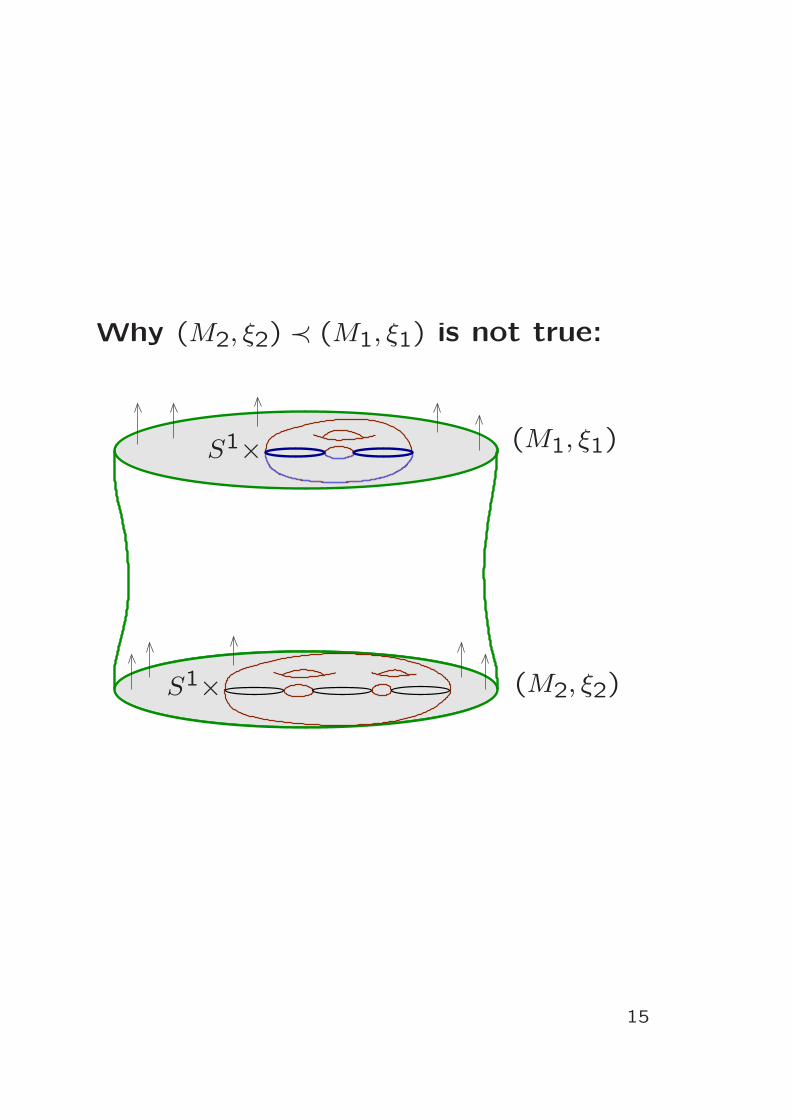
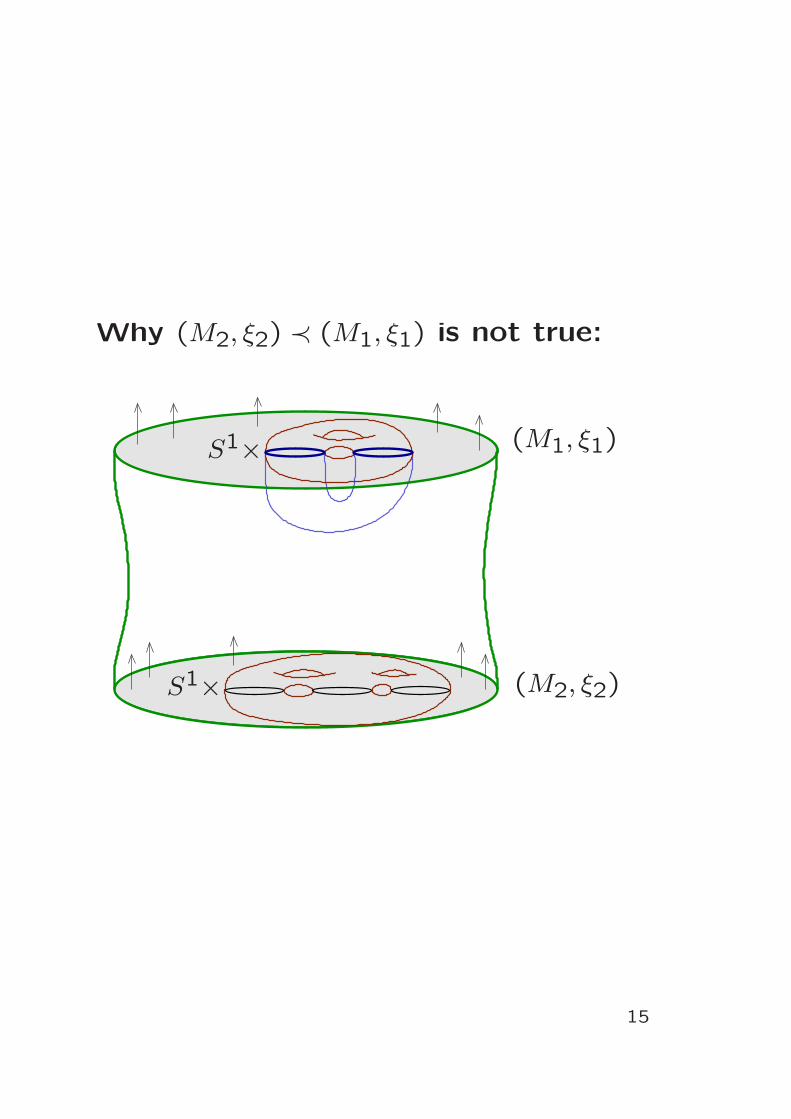
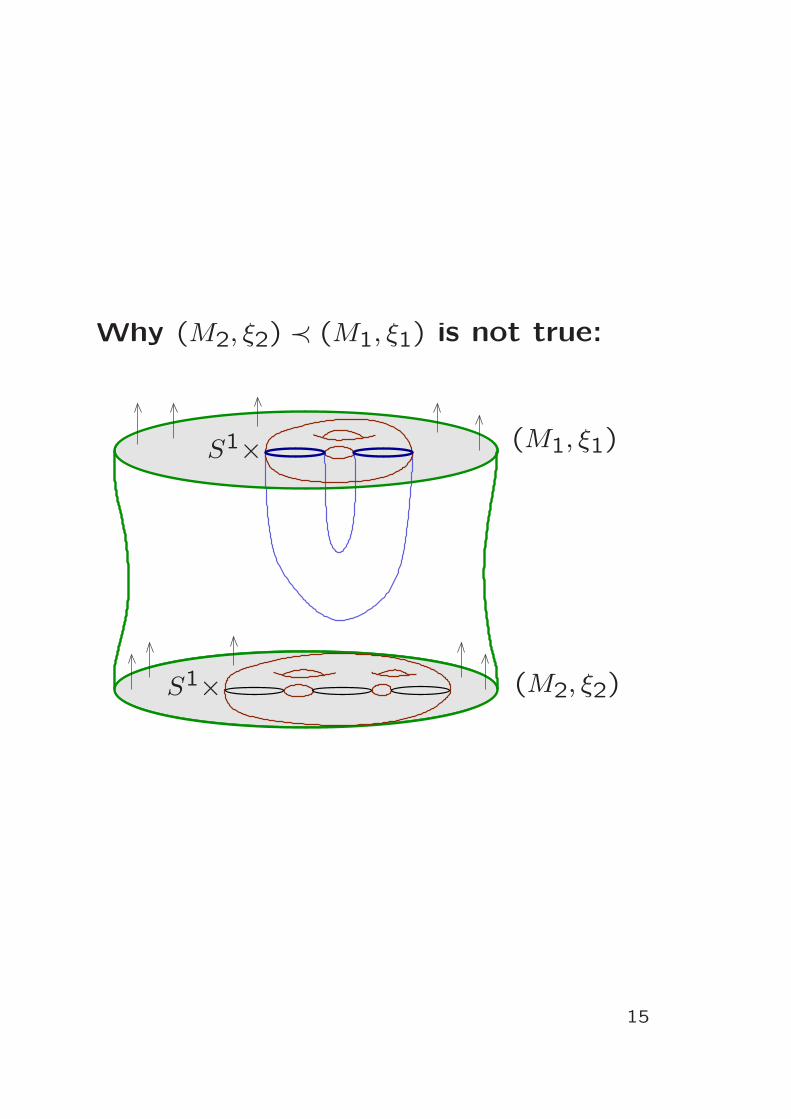
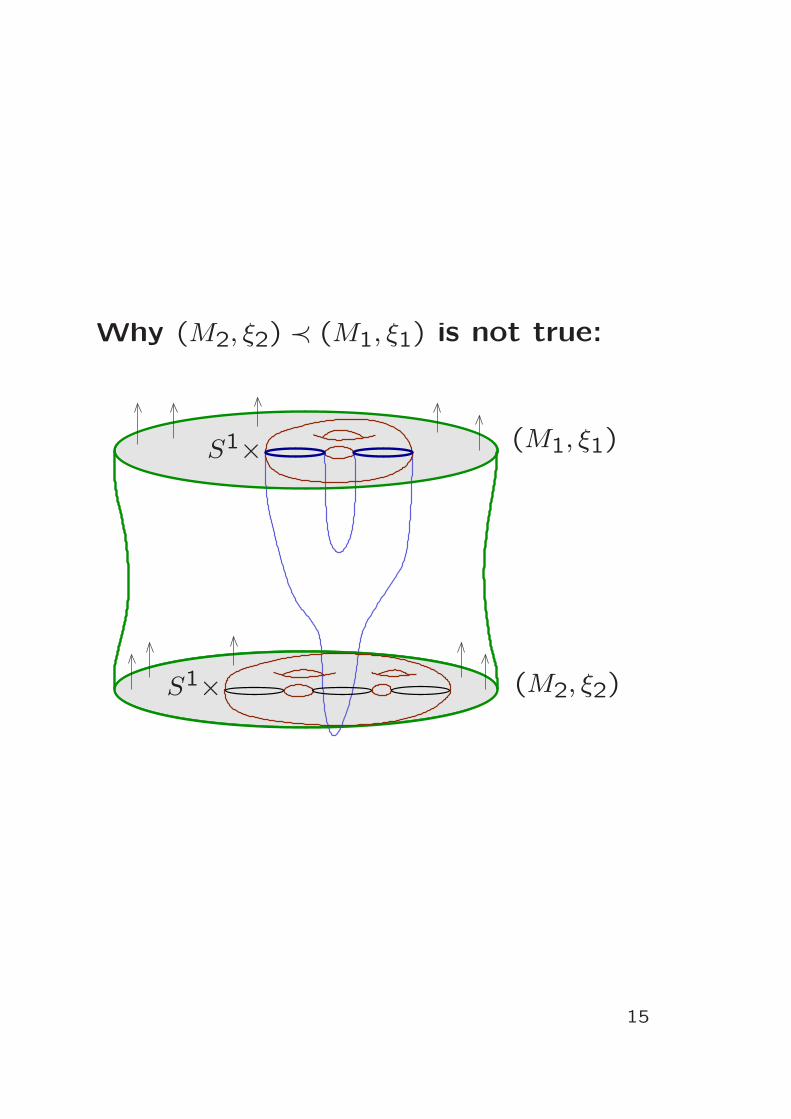
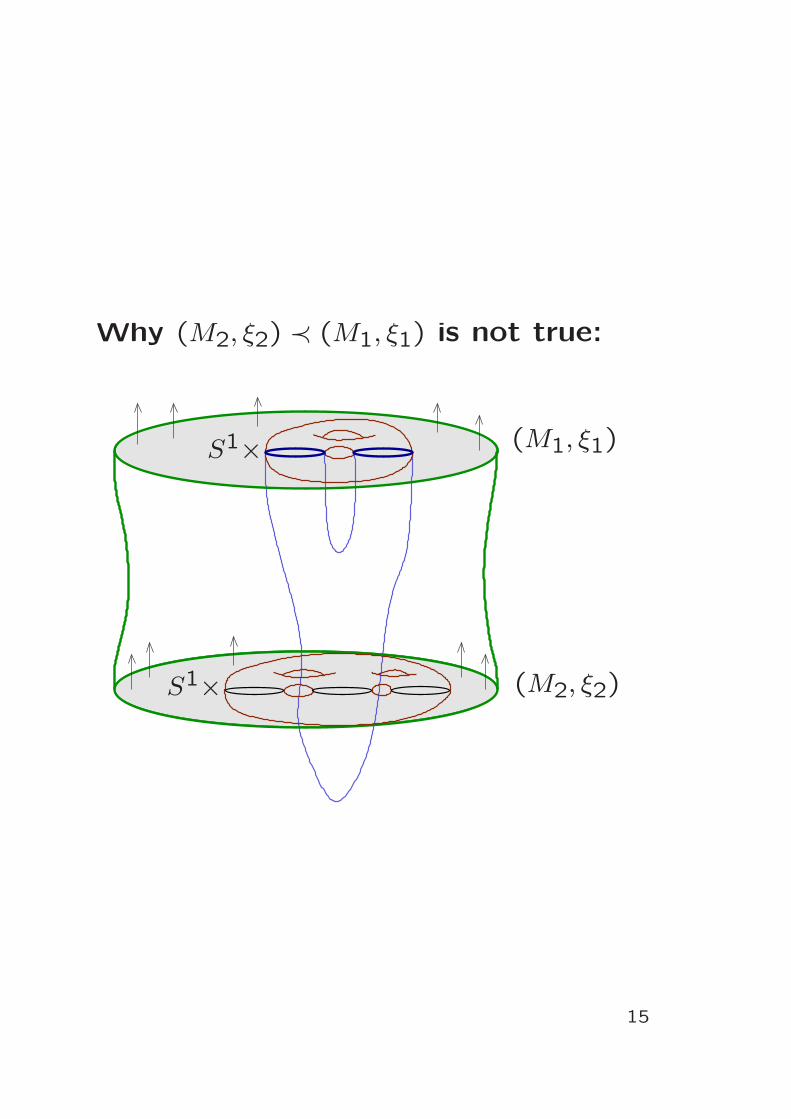
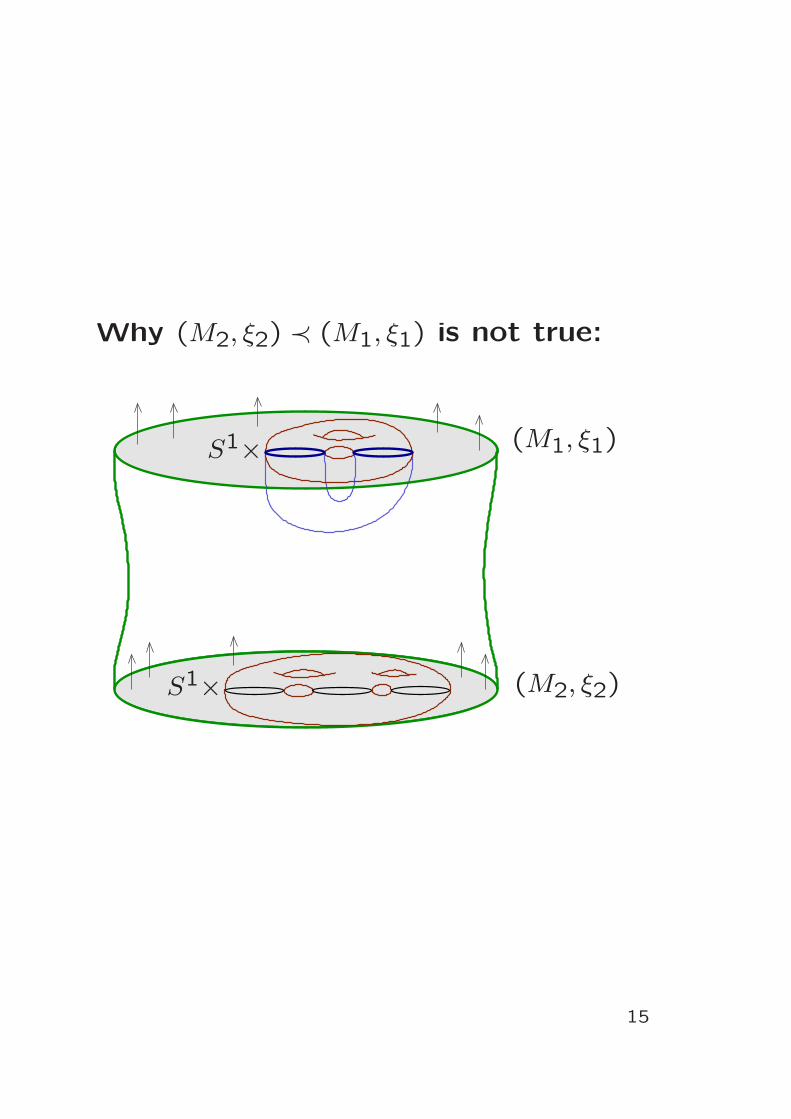
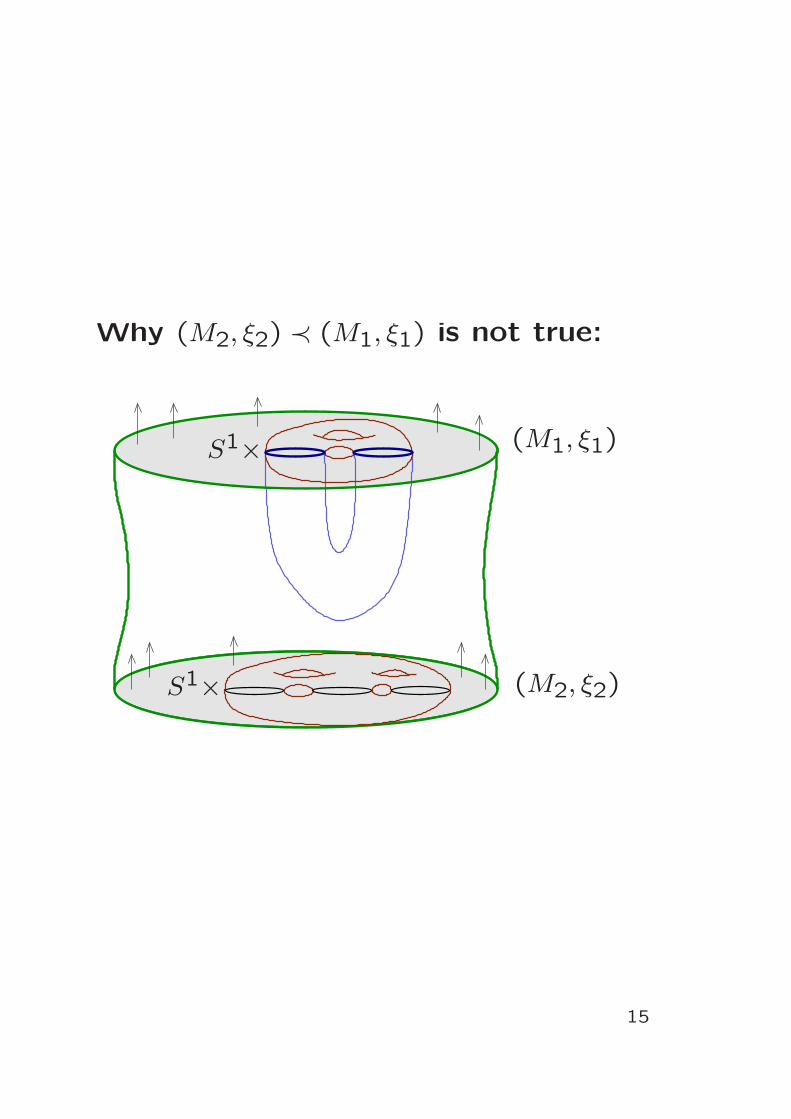
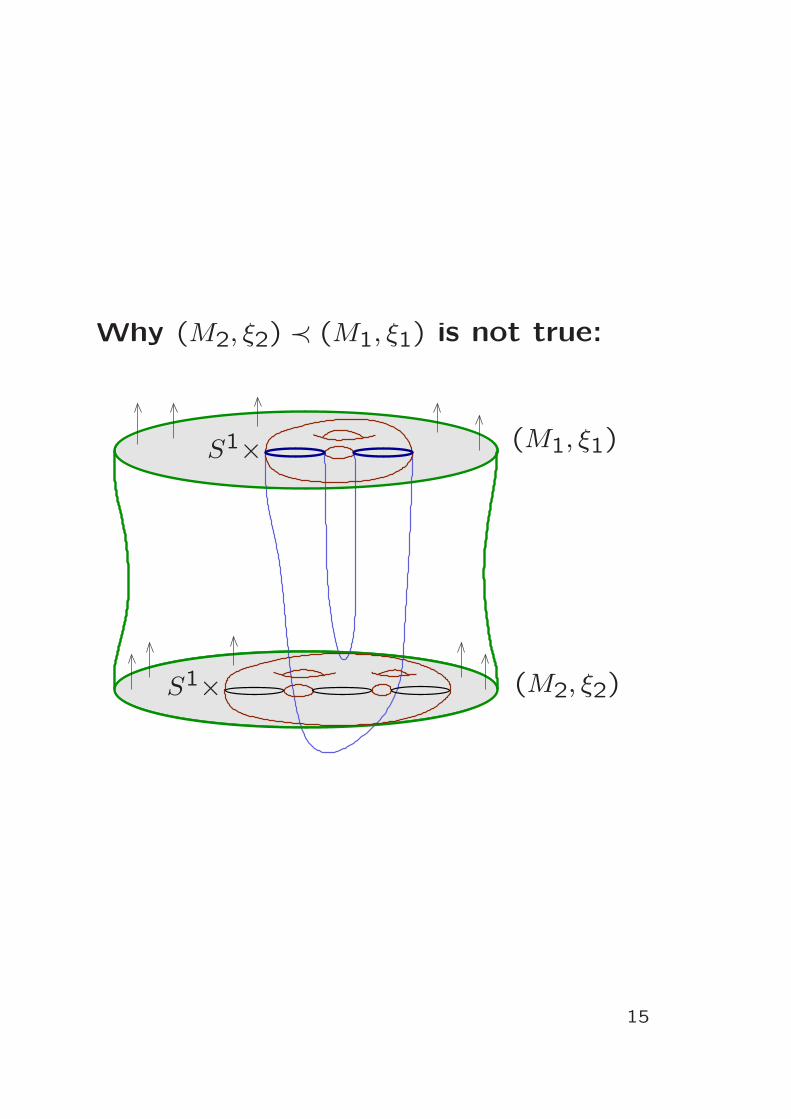
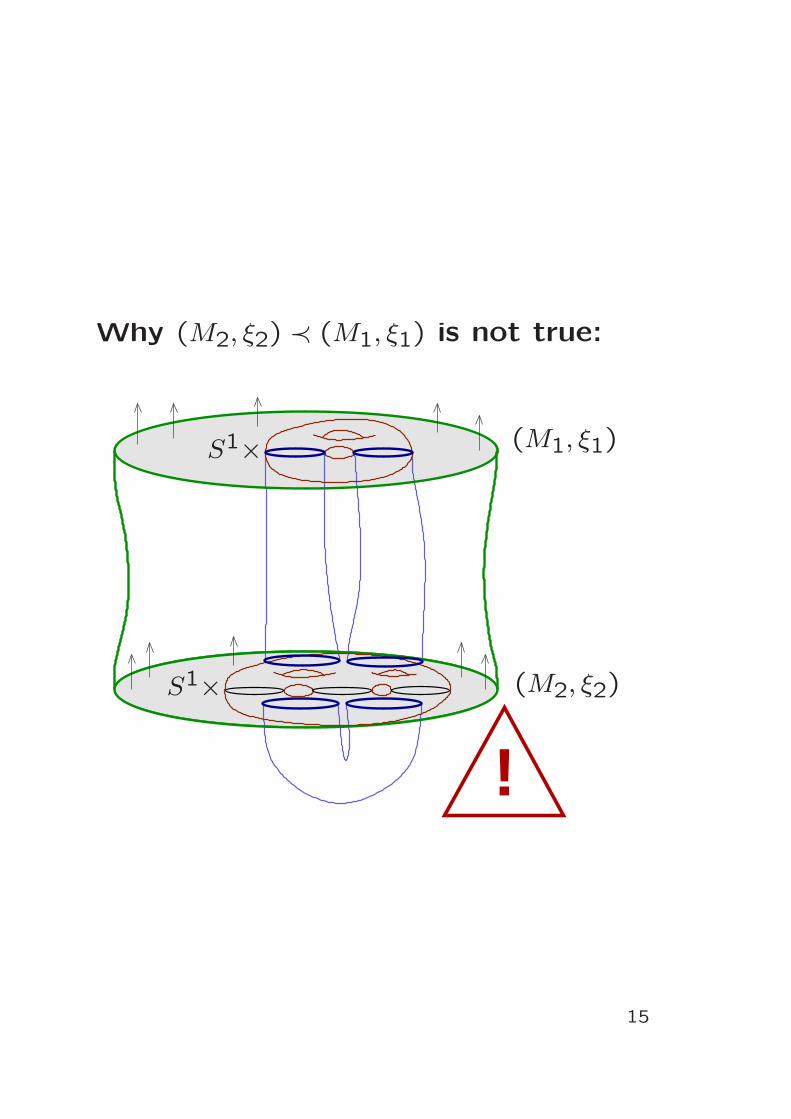
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1×
(M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
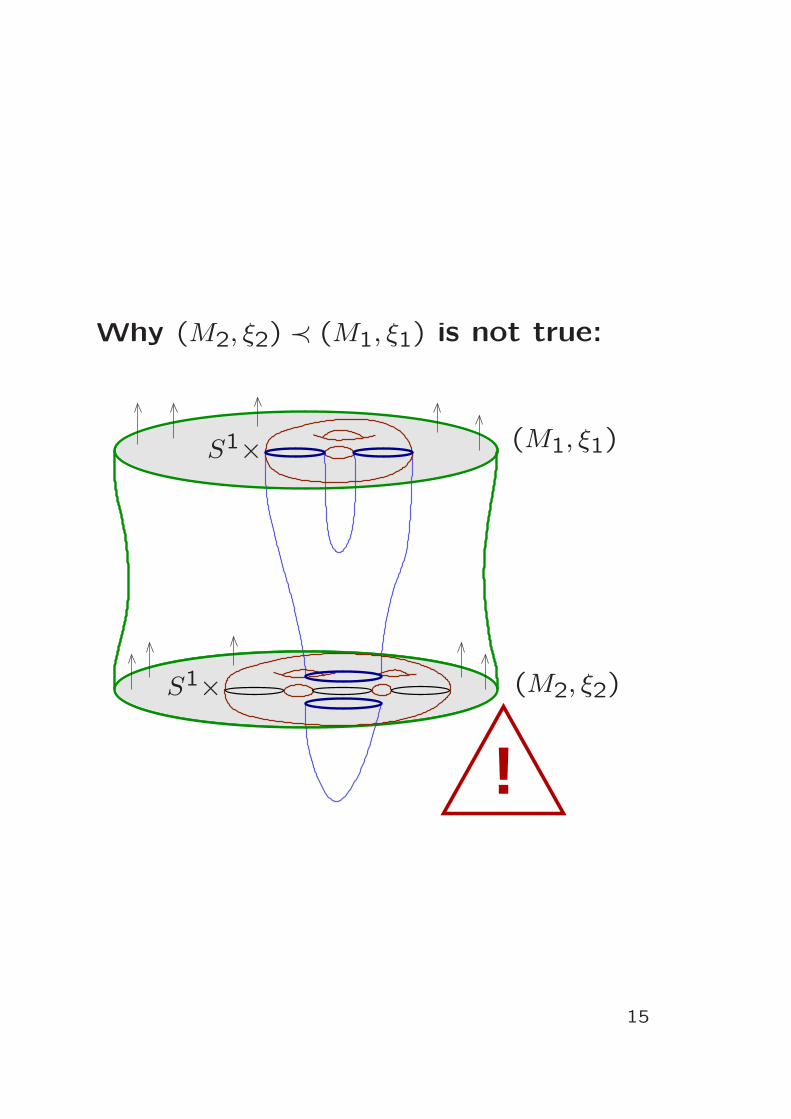
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
!
S1×
S1×
(M1, ξ1)
(M2, ξ2)
D D
15
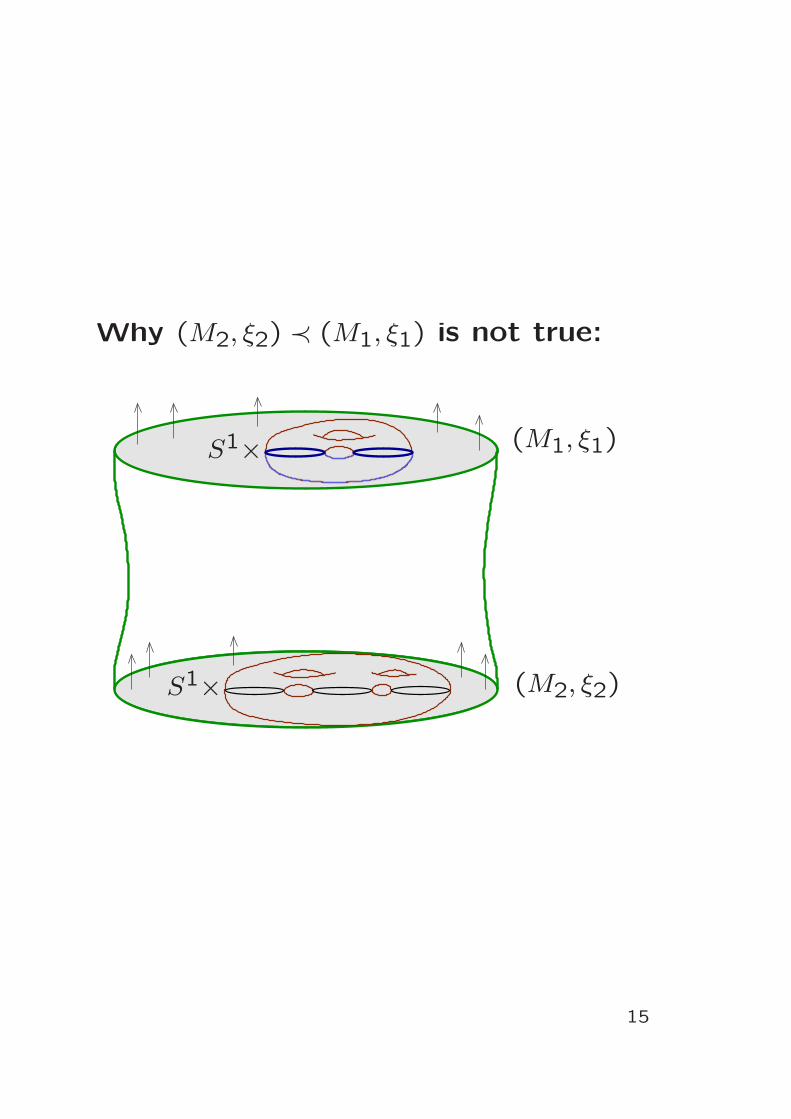
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
S1×
S1× (M1, ξ1)
(M2, ξ2)
D D
15
Why (M2, ξ2) ≺ (M1, ξ1) is not true:
!
S1×
S1×
(M1, ξ1)
(M2, ξ2)
D D
15
Some open questions and partial answers
1. What geometric conditions correspond to
AT(M, ξ) = k?� Overtwistedness, Giroux torsion, planar torsion:C. Wendl, A hierar hy of lo al �lling obstru tions for onta t 3-manifolds, Preprint 2010, arXiv:1009.2746.2. Interesting examples beyond dimension 3?� Higher-dimensional overtwisted disks:K. Niederkr�uger, The plastikstufe|a generalization ofthe overtwisted disk to higher dimensions, Algebr. Geom.Topol. 6 (2006), 2473-2508.F. Bourgeois, K. Niederkr�uger, PS-overtwisted onta tmanifolds are algebrai ally overtwisted, in preparation.� Higher-dimensional Giroux torsion:P. Massot, K. Niederkr�uger and C. Wendl, Weak andstrong �llability of higher dimensional onta t mani-folds, to appear in Invent. Math., Preprint 2011,arXiv:1111.6008.3. Can onta t stru tures with AT(M; �) �k be lassi�ed???� Overtwisted onta t stru tures are exible:Y. Eliashberg, Classi� ation of overtwisted onta t stru -tures on 3-manifolds, Invent. Math. 98 (1989), 623-637.� Coarse lassi� ation|�nitely many have AT(M; �) � 2:V. Colin, E. Giroux and K. Honda, Finitude homo-topique et isotopique des stru tures de onta t ten-dues, Publ. Math. Inst. Hautes �Etudes S i. 109 (2009),no. 1, 245-293.16

Some open questions and partial answers
1. What geometric conditions correspond to
AT(M, ξ) = k?
• Overtwistedness, Giroux torsion, planar torsion:C. Wendl, A hierarchy of local filling obstructions forcontact 3-manifolds, Preprint 2010, arXiv:1009.2746.2. Interesting examples beyond dimension 3?� Higher-dimensional overtwisted disks:K. Niederkr�uger, The plastikstufe|a generalization ofthe overtwisted disk to higher dimensions, Algebr. Geom.Topol. 6 (2006), 2473-2508.F. Bourgeois, K. Niederkr�uger, PS-overtwisted onta tmanifolds are algebrai ally overtwisted, in preparation.� Higher-dimensional Giroux torsion:P. Massot, K. Niederkr�uger and C. Wendl, Weak andstrong �llability of higher dimensional onta t mani-folds, to appear in Invent. Math., Preprint 2011,arXiv:1111.6008.3. Can onta t stru tures with AT(M; �) �k be lassi�ed???� Overtwisted onta t stru tures are exible:Y. Eliashberg, Classi� ation of overtwisted onta t stru -tures on 3-manifolds, Invent. Math. 98 (1989), 623-637.� Coarse lassi� ation|�nitely many have AT(M; �) � 2:V. Colin, E. Giroux and K. Honda, Finitude homo-topique et isotopique des stru tures de onta t ten-dues, Publ. Math. Inst. Hautes �Etudes S i. 109 (2009),no. 1, 245-293.
16
Some open questions and partial answers
1. What geometric conditions correspond to
AT(M, ξ) = k?
• Overtwistedness, Giroux torsion, planar torsion:C. Wendl, A hierarchy of local filling obstructions forcontact 3-manifolds, Preprint 2010, arXiv:1009.2746.
2. Interesting examples beyond dimension 3?� Higher-dimensional overtwisted disks:K. Niederkr�uger, The plastikstufe|a generalization ofthe overtwisted disk to higher dimensions, Algebr. Geom.Topol. 6 (2006), 2473-2508.F. Bourgeois, K. Niederkr�uger, PS-overtwisted onta tmanifolds are algebrai ally overtwisted, in preparation.� Higher-dimensional Giroux torsion:P. Massot, K. Niederkr�uger and C. Wendl, Weak andstrong �llability of higher dimensional onta t mani-folds, to appear in Invent. Math., Preprint 2011,arXiv:1111.6008.3. Can onta t stru tures with AT(M; �) �k be lassi�ed???� Overtwisted onta t stru tures are exible:Y. Eliashberg, Classi� ation of overtwisted onta t stru -tures on 3-manifolds, Invent. Math. 98 (1989), 623-637.� Coarse lassi� ation|�nitely many have AT(M; �) � 2:V. Colin, E. Giroux and K. Honda, Finitude homo-topique et isotopique des stru tures de onta t ten-dues, Publ. Math. Inst. Hautes �Etudes S i. 109 (2009),no. 1, 245-293.16
Some open questions and partial answers
1. What geometric conditions correspond to
AT(M, ξ) = k?
• Overtwistedness, Giroux torsion, planar torsion:C. Wendl, A hierarchy of local filling obstructions forcontact 3-manifolds, Preprint 2010, arXiv:1009.2746.
2. Interesting examples beyond dimension 3?
• Higher-dimensional overtwisted disks:K. Niederkruger, The plastikstufe—a generalization ofthe overtwisted disk to higher dimensions, Algebr. Geom.Topol. 6 (2006), 2473-2508.F. Bourgeois, K. Niederkr�uger, PS-overtwisted onta tmanifolds are algebrai ally overtwisted, in preparation.� Higher-dimensional Giroux torsion:P. Massot, K. Niederkr�uger and C. Wendl, Weak andstrong �llability of higher dimensional onta t mani-folds, to appear in Invent. Math., Preprint 2011,arXiv:1111.6008.3. Can onta t stru tures with AT(M; �) �k be lassi�ed???� Overtwisted onta t stru tures are exible:Y. Eliashberg, Classi� ation of overtwisted onta t stru -tures on 3-manifolds, Invent. Math. 98 (1989), 623-637.� Coarse lassi� ation|�nitely many have AT(M; �) � 2:V. Colin, E. Giroux and K. Honda, Finitude homo-topique et isotopique des stru tures de onta t ten-dues, Publ. Math. Inst. Hautes �Etudes S i. 109 (2009),no. 1, 245-293.
16

Some open questions and partial answers
1. What geometric conditions correspond to
AT(M, ξ) = k?
• Overtwistedness, Giroux torsion, planar torsion:C. Wendl, A hierarchy of local filling obstructions forcontact 3-manifolds, Preprint 2010, arXiv:1009.2746.
2. Interesting examples beyond dimension 3?
• Higher-dimensional overtwisted disks:K. Niederkruger, The plastikstufe—a generalization ofthe overtwisted disk to higher dimensions, Algebr. Geom.Topol. 6 (2006), 2473-2508.F. Bourgeois, K. Niederkruger, PS-overtwisted contactmanifolds are algebraically overtwisted, in preparation.� Higher-dimensional Giroux torsion:P. Massot, K. Niederkr�uger and C. Wendl, Weak andstrong �llability of higher dimensional onta t mani-folds, to appear in Invent. Math., Preprint 2011,arXiv:1111.6008.3. Can onta t stru tures with AT(M; �) �k be lassi�ed???� Overtwisted onta t stru tures are exible:Y. Eliashberg, Classi� ation of overtwisted onta t stru -tures on 3-manifolds, Invent. Math. 98 (1989), 623-637.� Coarse lassi� ation|�nitely many have AT(M; �) � 2:V. Colin, E. Giroux and K. Honda, Finitude homo-topique et isotopique des stru tures de onta t ten-dues, Publ. Math. Inst. Hautes �Etudes S i. 109 (2009),no. 1, 245-293.
16

Some open questions and partial answers
1. What geometric conditions correspond to
AT(M, ξ) = k?
• Overtwistedness, Giroux torsion, planar torsion:C. Wendl, A hierarchy of local filling obstructions forcontact 3-manifolds, Preprint 2010, arXiv:1009.2746.
2. Interesting examples beyond dimension 3?
• Higher-dimensional overtwisted disks:K. Niederkruger, The plastikstufe—a generalization ofthe overtwisted disk to higher dimensions, Algebr. Geom.Topol. 6 (2006), 2473-2508.F. Bourgeois, K. Niederkruger, PS-overtwisted contactmanifolds are algebraically overtwisted, in preparation.
• Higher-dimensional Giroux torsion:P. Massot, K. Niederkruger and C. Wendl, Weak andstrong fillability of higher dimensional contact mani-folds, to appear in Invent. Math., Preprint 2011,arXiv:1111.6008.3. Can onta t stru tures with AT(M; �) �k be lassi�ed???� Overtwisted onta t stru tures are exible:Y. Eliashberg, Classi� ation of overtwisted onta t stru -tures on 3-manifolds, Invent. Math. 98 (1989), 623-637.� Coarse lassi� ation|�nitely many have AT(M; �) � 2:V. Colin, E. Giroux and K. Honda, Finitude homo-topique et isotopique des stru tures de onta t ten-dues, Publ. Math. Inst. Hautes �Etudes S i. 109 (2009),no. 1, 245-293.
16
Some open questions and partial answers
1. What geometric conditions correspond to
AT(M, ξ) = k?
• Overtwistedness, Giroux torsion, planar torsion:C. Wendl, A hierarchy of local filling obstructions forcontact 3-manifolds, Preprint 2010, arXiv:1009.2746.
2. Interesting examples beyond dimension 3?
• Higher-dimensional overtwisted disks:K. Niederkruger, The plastikstufe—a generalization ofthe overtwisted disk to higher dimensions, Algebr. Geom.Topol. 6 (2006), 2473-2508.F. Bourgeois, K. Niederkruger, PS-overtwisted contactmanifolds are algebraically overtwisted, in preparation.
• Higher-dimensional Giroux torsion:P. Massot, K. Niederkruger and C. Wendl, Weak andstrong fillability of higher dimensional contact mani-folds, to appear in Invent. Math., Preprint 2011,arXiv:1111.6008.
3. Can contact structures with AT(M, ξ) ≥k be classified???� Overtwisted onta t stru tures are exible:Y. Eliashberg, Classi� ation of overtwisted onta t stru -tures on 3-manifolds, Invent. Math. 98 (1989), 623-637.� Coarse lassi� ation|�nitely many have AT(M; �) � 2:V. Colin, E. Giroux and K. Honda, Finitude homo-topique et isotopique des stru tures de onta t ten-dues, Publ. Math. Inst. Hautes �Etudes S i. 109 (2009),no. 1, 245-293.
16
Some open questions and partial answers
1. What geometric conditions correspond to
AT(M, ξ) = k?
• Overtwistedness, Giroux torsion, planar torsion:C. Wendl, A hierarchy of local filling obstructions forcontact 3-manifolds, Preprint 2010, arXiv:1009.2746.
2. Interesting examples beyond dimension 3?
• Higher-dimensional overtwisted disks:K. Niederkruger, The plastikstufe—a generalization ofthe overtwisted disk to higher dimensions, Algebr. Geom.Topol. 6 (2006), 2473-2508.F. Bourgeois, K. Niederkruger, PS-overtwisted contactmanifolds are algebraically overtwisted, in preparation.
• Higher-dimensional Giroux torsion:P. Massot, K. Niederkruger and C. Wendl, Weak andstrong fillability of higher dimensional contact mani-folds, to appear in Invent. Math., Preprint 2011,arXiv:1111.6008.
3. Can contact structures with AT(M, ξ) ≥k be classified???
• Overtwisted contact structures are flexible:Y. Eliashberg, Classification of overtwisted contact struc-tures on 3-manifolds, Invent. Math. 98 (1989), 623-637.� Coarse lassi� ation|�nitely many have AT(M; �) � 2:V. Colin, E. Giroux and K. Honda, Finitude homo-topique et isotopique des stru tures de onta t ten-dues, Publ. Math. Inst. Hautes �Etudes S i. 109 (2009),no. 1, 245-293.
16
Some open questions and partial answers
1. What geometric conditions correspond to
AT(M, ξ) = k?
• Overtwistedness, Giroux torsion, planar torsion:C. Wendl, A hierarchy of local filling obstructions forcontact 3-manifolds, Preprint 2010, arXiv:1009.2746.
2. Interesting examples beyond dimension 3?
• Higher-dimensional overtwisted disks:K. Niederkruger, The plastikstufe—a generalization ofthe overtwisted disk to higher dimensions, Algebr. Geom.Topol. 6 (2006), 2473-2508.F. Bourgeois, K. Niederkruger, PS-overtwisted contactmanifolds are algebraically overtwisted, in preparation.
• Higher-dimensional Giroux torsion:P. Massot, K. Niederkruger and C. Wendl, Weak andstrong fillability of higher dimensional contact mani-folds, to appear in Invent. Math., Preprint 2011,arXiv:1111.6008.
3. Can contact structures with AT(M, ξ) ≥k be classified???
• Overtwisted contact structures are flexible:Y. Eliashberg, Classification of overtwisted contact struc-tures on 3-manifolds, Invent. Math. 98 (1989), 623-637.
• Coarse classification—finitely many have AT(M, ξ) ≥ 2:V. Colin, E. Giroux and K. Honda, Finitude homo-topique et isotopique des structures de contact ten-dues, Publ. Math. Inst. Hautes Etudes Sci. 109 (2009),no. 1, 245-293.
16
Main reference
• Janko Latschev and Chris Wendl, Algebraic tor-sion in contact manifolds, Geom. Funct. Anal.21 (2011), no. 5, 1144-1195, with an appendixby Michael Hutchings.
Acknowledgment
Contact structure illustrations by Patrick Massot:
http://www.math.u-psud.fr/~pmassot/
-dimensional
These slides are available at:
http://www.homepages.ucl.ac.uk/~ucahcwe/publications.html#talks
17











![CAREER: Symplectic Duality 1 Introduction › njp › CAREER08.pdfWebster [PW] have used the arithmetic of symplectic varieties over nite elds to draw conclusions about the topology](https://img.pdfslide.tips/doc/110x75/5f039dc57e708231d409ee6e/career-symplectic-duality-1-introduction-a-njp-a-career08pdf-webster-pw.jpg)