Embed Size (px)
Citation preview

TRITA-FKT 2002:39 ISSN 1103-470X ISRN KTH/FKT/D--02/39--SE
ON DYNAMIC PROPERTIES OF RUBBER ISOLATORS
Mattias Sjöberg
Department of Vehicle Engineering Stockholm
2002 The Marcus Wallenberg Laboratory for Sound and Vibration Research
Address MWL Dept. Vehicle Engineering, KTH 100 44 Stockholm
Visiting address Teknikringen 8 Stockholm
Telephone +46 8 790 89 27
Fax +46 8 790 61 22
E-mail [email protected]
The Marcus Wallenberg Laboratory for Sound and Vibration Research
On Dynamic Properties of Rubber Isolators
Mattias Sjöberg
Doctoral Thesis
ISSN 1103-470X ISRN KTH/FKT/D--02/39--SE

Preface The work forming this thesis was carried out between October 1999 and December 2002 at the Department of Vehicle Engineering at the Royal Institute of Technology (KTH) in Stockholm and at Scania CV AB in Södertälje, which also provided the gratefully acknowledged financial support. There are a number of persons who have helped me during this time period to whom I would like to express my gratitude. First of all to my supervisor Leif Kari ? thank you for providing excellent guidance in this subject and in the world of research; to Kent Lindgren for his assistance with measurements; to my room mate Urmas Ross for helping out whenever my computer and I disagreed; to Anthony Vinogradoff for language and readability improvement and to my industrial supervisor Boris Thorvald and to Tor Langhed for giving valuable feedback with an industrial touch. I would also like to thank the remainder of my colleagues at the Department of Vehicle Engineering and at the Group of Vehicle Dynamics at Scania for an inspiring environment both professionally and socially. I would also like to thank my parents and my brother with his family for being there, giving me such valuable spare time during all joint projects ? many being in our wilderness in Hälsingland. Finally, I would especially like to express my appreciation to my wife Malin and my children Arvid and Vilma for providing the most important aspects of my life. Mattias Sjöberg Stockholm in December 2002.

Abstract This work aims at enhancing the understanding and to provide improved models of the dynamic behavior of rubber vibration isolators which are widely used in mechanical systems. Initially, a time domain model relating compressions to component forces accounting for preload effects, frequency and dynamic amplitude dependence is presented. The problem of simultaneously modelling the elastic, viscoelastic and friction forces are removed by additively splitting them, where the elastic force response is modelled either by a fully linear or a nonlinear shape factor based approach, displaying results that agree with those of a neo-Hookean hyperelastic isolator under a long term precompression. The viscoelastic force is modelled by a fractional derivative element, while the friction force governs from a generalized friction element displaying a smoothed Coulomb force. This is a versatile one-dimensional component model effectively using a small number of parameters while exhibiting a good resemblance to measured isolator characteristics. Additionally, the nonlinear excitation effects on dynamic stiffness and damping of a filled rubber isolator are investigated through measurements. It is shown that the well-known Payne effect ? where stiffness is high for small excitation amplitudes and low for large amplitudes while damping displays a maximum at intermediate amplitudes ? evaluated at a certain frequency, is to a large extent influenced by the existence of additional frequency components in the signal. Finally, a frequency, temperature and preload dependent dynamic stiffness model is presented covering the ranges from 20 to 20 000 Hz, ?50 to +50 ?C at 0 to 20 % precompression. A nearly incompressible, thermo -rheologically simple material model is adopted displaying viscoelasticity through a time ? strain separable relaxation tensor with a single Mittag? Leffler function embodying its time dependence. This fractional derivative based function successfully fits material properties throughout the whole audible frequency range. An extended neo-Hookean strain energy function, being directly proportional to the temperature and density, is applied for the finite deformation response with component properties solved by a nonlinear finite element procedure. The presented work is thus believed to enlighten working conditions’ impact on the dynamic properties of rubber vibration isolators, while additionally taking some of these most important features into account in the presented models.
KEYWORDS
Rubber isolator, Dynamic stiffness, Nonlinear, Payne effect, Audible frequency, Fractional derivative, Mittag? Leffler function, Thermo -rheologically simple, Neo-Hooke

Dissertation
This thesis consists of an introduction and 5 appended papers. The performed work has been planned jointly by Mattias Sjöberg and Leif Kari, where the latter acted as supervisor. The appended papers are: PAPER A Sjöberg M. Rubber Isolators - Measurements and modelling using fractional derivatives and friction. SAE paper No 2000-01-3518, 2000. The model development, implementation, simulation, experiment, evaluation and writing were essentially performed by Mattias. Mattias has done approximately 95 % of the total work. PAPER B Sjöberg M. Kari L. Nonlinear behavior of a rubber isolator system using fractional derivatives. Vehicle System Dynamics 37(3), 217-236, 2002. The model development, implementation, simulation, experiment, evaluation and writing were essentially performed by Mattias. Mattias has done approximately 95 % of the total work. PAPER C Sjöberg M. Kari L. Nonlinear isolator dynamics at finite deformations: An effective hyperelastic, fractional derivative, generalized friction model. Submitted 2002 for publication in Nonlinear Dynamics. The model implementation and simulation were essentially performed by Mattias. The model development, evaluation and writing was performed jointly by Mattias and Leif. Mattias has done approximately 75 % of the total work. PAPER D Sjöberg M. Kari L. Testing of nonlinear interaction effects of sinusoidal and noise excitation on rubber isolator stiffness. Polymer Testing 22(3), 347-355, 2003. The experiments, evaluation and writing were essentially performed by Mattias. Mattias has done approximately 95 % of the total work. PAPER E Kari L. Sjöberg M. Temperature dependent stiffness of a precompressed rubber isolator in the audible frequency range. Submitted 2002 for publication in International Journal of Solids and Structures. The model development, evaluation and writing were performed jointly by Mattias and Leif. The simulation was performed by Leif. Mattias has done approximately 50 % of the total work

Contents
1 Background 11.1 VIBRATION ISOLATORS . . . . . . . . . . . . . . . . . . . . . 11.2 AIM OF PRESENTED RESEARCH . . . . . . . . . . . . . . . . 2
2 Component properties 32.1 NONLINEAR EFFECTS OF RUBBER COMPONENTS . . . . 3
2.1.1 Dynamic amplitude dependence . . . . . . . . . . . . . . . 32.1.2 Consequence of frequency interaction on the dynamic am-
plitude dependence . . . . . . . . . . . . . . . . . . . . . . 62.2 TEMPERATURE DEPENDENCE . . . . . . . . . . . . . . . . . 82.3 FREQUENCY DEPENDENCE . . . . . . . . . . . . . . . . . . . 82.4 TEMPERATURE – FREQUENCY SHIFTS . . . . . . . . . . . 9
3 Component modelling 123.1 FREQUENCY DEPENDENCE . . . . . . . . . . . . . . . . . . . 12
3.1.1 Fractional derivatives . . . . . . . . . . . . . . . . . . . . 133.2 DYNAMIC AMPLITUDE DEPENDENCE . . . . . . . . . . . . 143.3 FINITE DEFORMATION DEPENDENCE . . . . . . . . . . . . 15
4 Presented models 174.1 MODEL IN PAPER A – C . . . . . . . . . . . . . . . . . . . . . 17
4.1.1 Elastic force model . . . . . . . . . . . . . . . . . . . . . . 174.1.2 Short term viscoelastic force model . . . . . . . . . . . . . 184.1.3 Friction force model . . . . . . . . . . . . . . . . . . . . . 184.1.4 Total force model . . . . . . . . . . . . . . . . . . . . . . . 19
4.2 MODEL IN PAPER E . . . . . . . . . . . . . . . . . . . . . . . . 19
5 Future Research 23
0

Chapter 1
Background
It is believed that rubber was first used by the Mayan people in ancient Mesoamer-ica as long ago as 1600 BC, where sap from the rubber tree was mixed with juicesfrom other plants. This resulted in a durable and elastic material used for mak-ing e.g. rubber balls for ritual games and artwork. The recipe for the moderntype of rubber however, where natural gum is heated after being mixed withsulphur — a process called vulcanization — is accredited to Charles Goodyear.Accidentally he found in 1839 that, due to the vulcanization process, the rub-ber changed drastically producing a material with unique mechanical properties.Ever since, rubber has found an indisputable role in many mechanical applica-tions where tires, seals, hoses and vibration isolators are a few examples.
1.1 VIBRATION ISOLATORS
Associated with vehicle applications, vibrations are normally conceived as un-wanted dynamic motions and great effort is made reducing these motions toimprove comfort for passengers and goods and to increase vehicle componentdurability. The most common way of reducing unwanted vibrations at a receiv-ing structure is, at some point between the source and receiver, to either reflectthe vibration energy by significantly changing the impedance or to dissipate itby inducing additional damping. The former is readily achieved either by in-troducing a much softer component compared to the surrounding structure orby introducing an increase in mass. Structures in vehicles are generally quitestiff and additional mass comes with a penalty in the form of increased fuelconsumption, meaning that in practice the most widely used way of changingthe impedance is by introducing a softer component — a vibration isolator.The properties of rubber — being generally soft while showing large inherentdamping — makes the material a perfect choice for use in vibration isolators. Arepresentative rubber vibration isolator consists of one or more pieces of vulcan-ized rubber bonded to metal parts, facilitating load distribution and installation.
1

2 M. SJOBERG
The large difference in material bulk and shear modulus enables the design ofa wide range of component properties by adjusting its geometry.
Material as well as component properties are discussed in the subsequenttext and they are related in that a rubber component exhibits the same basiccharacteristics concerning stiffness and loss angle as the material does in termsof shear modulus magnitude and loss factor. Exceptions to this rule of thumbare e.g. when the geometry of the component introduces additional nonlineareffects, such as a progressive stiffness (discussed in Paper C), or when the eval-uated frequency range is extended, resulting in component internal resonanceswhich influence its dynamic properties (discussed in Paper E).
1.2 AIM OF PRESENTED RESEARCH
As various mechanical systems utilize rubber isolators for dynamic improve-ment, there is a great need to understand and properly predict the behavior ofthese rubber components. However, as the field of interest often varies; fromlow frequency–large amplitude dynamics to structure borne sound transmission,while prediction of system dynamics is performed with a variety of tools; e.g.multi body system (MBS) programs, finite element (FE) programs and linearfrequency domain transfer function predictions, it is difficult to implement amodel considering all applications. Furthermore, a model accounting for toowide ranges of working conditions would probably not be of practical use sincethe computational effort would be quite cumbersome. Using simplified rubbercomponent models, which adequately span the working conditions in questionwhile omitting less important properties, is therefore often desirable. However,the need to correctly adjust simple model parameters often demand extensiveinvestigations. The aim of this work is thus to enhance understanding of howcomponent properties are influenced by certain working conditions while alsoproviding some accurate descriptive models. Those presented can be used incomplete system investigations and as a means of finding model parameters forsimpler approaches.
Chapter 2
Component properties
2.1 NONLINEAR EFFECTS OF RUBBER COMPONENTS
Component nonlinearities due to amplitude dependence are often present asdiscussed by Harris and Stevenson [37]. These effects can be due both to thegeometrical design of the component as well as to intrinsic material behavior asdiscussed by e.g. Treloir [88] or Freakly and Payne [31]. These references presentmaterial nonlinear stress–strain relations for finite strain ranging approximatelyfrom 20 to 500 %. Components also exhibit nonlinear properties for small tointermediate amplitudes — ranging approximately up to 5 % component strain— due to material behavior where small cyclic deformation results in increasedstiffness compared to that of large cyclic deformation [31].
An example of how the finite amplitude material or geometrical propertiesmight influence a component force–displacement curve, is given in Figure 2.1 asthe precompression of a cylindrical component (with a diameter of 10 mm anda height of 2.5 mm) results in a progressive preload curve (shown by the dottedline). Dynamic steady state motion of different amplitudes superimposed on theprecompression, in this case 0.8 mm, reveals that stiffness (indicated by the slopefrom the minimum to the maximum point of the oscillating motion) is reducedas amplitude increases. This behavior is known as the Payne effect [79] alsodenoted as dynamic amplitude dependence, although the effects are in fact rateindependent. Despite this attempt to distinguish between reasons for componentnonlinearities by means of different amplitudes it is not always possible to makea clear distinction as e.g. large amplitude oscillations are influenced not only bythe Payne effect but also through material and geometrical finite deformationdependencies as discussed in Paper C.
2.1.1 Dynamic amplitude dependence
There are two well-known amplitude effects occurring in filled vulcanized rubbermaterial; the Mullin’s effect and the Payne effect. An example of the formereffect is when previously unstrained rubber is subjected to strain cycles at con-
3

4 M. SJOBERG
0 0.25 0.5 0.75 1 0
250
500
750
1000
Displacement [mm]
Forc
e [N
]
For
ce [N
]
Displacement [mm]
(a) Dotted line; Nonlinear force-displacement curve due to precompres-sion.
0.75 0.8 0.85560
600
640
680
720
760
Displacement [mm]
Forc
e [N
]
(b) Solid line; Dynamic nonlinear-ity due to small amplitude motion.(Zoomed at the working point)
Figure 2.1: Schematic component behavior when exposed to a precompressionwith superimposed small amplitude dynamic motion.
stant peak value and the first few oscillations result in reducing peak stressvalues as discussed by Mullins [69], Mullins et al. [68]. This effect is also shownby Sjoberg [85] through component measurements. To eliminate the record-ing of this effect while performing measurements of dynamic characteristics, itis useful to conduct mechanical conditioning, namely subjecting the test ob-ject to a few large deformation cycles to rearrange molecular networks prior tomeasurements.
The latter effect — often becoming more pronounced as fillers, such as carbonblack, are added to the rubber compound — is displayed as a decreased shearmodulus magnitude with increased amplitude. Component measurements andmodels showing this phenomena are presented in Paper A – D. Interaggregateinteractions breaking as motion increases, but which are almost fully recoveredwithin each cycle, is believed to be the main reason for this effect [66]. An intactfiller structure displays a large shear modulus magnitude for small amplitudesbut as the amplitude increases the structure breaks resulting in a modulus de-crease. The breaking of filler structure, described as frictional behavior, howeverincreases the loss factor and as the amplitude increases further the frictional be-havior is released resulting in a low shear modulus magnitude due mainly to theremaining polymer chains and rubber-filler hydrodynamic effects [66, 79]. Theenergy dissipation mechanism is also decreased in importance resulting in lowvalues of loss factor [65]. An example of the Payne effect is shown in Figure 2.2as dynamic stiffness and loss angle of a filled vibration isolator is evaluated forvarious amplitudes. A thorough discussion is given in reference [79], showingexamples of a strong amplitude dependence of the shear modulus and loss fac-tor of butyl rubber with various filler concentrations. In addition, Medalia [66]

On dynamic properties of rubber isolators. 5
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
5
10
15
S
tiffn
ess
[kN
/mm
]
Amplitude [mm]0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
5
10
15
20
L
oss
angl
e [
o ]
Figure 2.2: Measurements of stiffness and loss angle of a filled rubber isolatorshowing a strong amplitude dependence, denoted the Payne effect [Paper D].
gives a good review of amplitude, frequency and temperature effects on me-chanical rubber characteristics. Other work focusing on the influence of fillerson dynamic properties is performed by e.g. Dean et al. [21], Jurado et al. [44],Sommer and Meyer [86] and Wang [93], where the two latter articles, besidesthe Payne effect, also discuss temperature influences on the filler effects. Wanget al. [92] point to additional stress reducing phenomena due to repeated strainsweeps.
The effects discussed here result not only in nonlinear amplitude effects asindicated in Figure 2.2 but also in a frequency split. A single frequency harmonicdisplacement excitation, x = asin(ω0t) of a rubber vibration isolator, results ina force response of the fundamental frequency, or first harmonic ω0, as well asof a number of physical overtones
F = F0sin(ω0t + δ0) +∑
Fnsin(ωnt + δn), (2.1)
where the first equals the third harmonic, the second equals the fifth harmonicetc, as shown in Paper D. Tariq et al. [87] as well as Onogi and Matsumoto [74]quantify the degree of nonlinearity by evaluating the overtones. As discussedin Paper C, the existence of additional harmonics is possible if the componentexhibits e.g. nonlinear finite force–displacement relations which is the case inFigure 2.1.

6 M. SJOBERG
2.1.2 Consequence of frequency interaction on the dynamic ampli-tude dependence
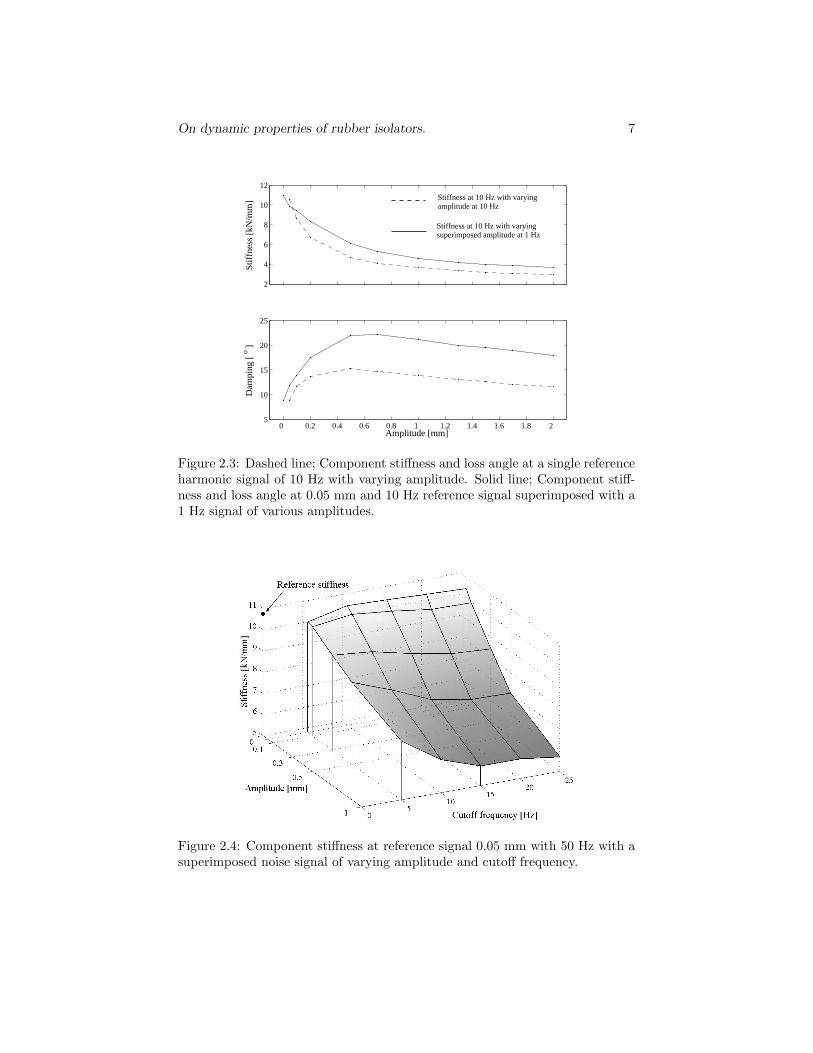
Vibration isolators are rarely exposed to single tone excitation — which howeveris the usual measurement condition for evaluating component properties. Anexample of an isolator’s use clearly violating this simplified case, is an ordinaryrubber engine mount reducing transmission of high frequency engine vibrationsto the chassis, while simultaneously being driven over rough road surfaces in-ducing large movements of the engine. Influence of these effects have to somedegree been investigated by Harris [36] while presenting elastomer response dur-ing non-sinusoidal excitation, a subject also addressed by Turner et al. [89] andGregory [35]. Coveney et al. [20] present simulations of a model exposed todual-sine excitation and compare these to the measurements in reference [36],whereas Kooijman and Verheij [53], having railway sleeper rubber pads in mind,show measurements pointing to a softening effect on high frequency low ampli-tude stiffness due to simultaneous large amplitude step loading. Paper D ofthis thesis experimentally investigates the influence of multiple excitation onthe dynamic amplitude dependence as component stiffness and loss angle for ahigh frequency signal is evaluated while being superimposed with large ampli-tude low frequency signals, as shown in Figure 2.3. Here it can be concludedthat stiffness at a certain frequency is not governed by the amplitude at thatfrequency but rather by the largest amplitude present in the signal and that su-perimposing large amplitude motion, also increases the loss angle. Additionallypresented in Paper D is the high frequency component stiffness while beingexposed to low frequency noise, thus being a novel extension of the previouswork in reference [36]. In accordance with the previous case a high frequencystiffness reduction is found due to the large amplitude noise. Further, the lowfrequency noise influence is increased as its amplitude increases and as its cut-offfrequency approaches that of the high frequency signal, as shown in Figure 2.4.
On dynamic properties of rubber isolators. 7
2
4
6
8
10
12
Stif
fnes
s [k
N/m
m]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 5
10
15
20
25
Dam
ping
[ o ]
Amplitude [mm]
Stiffness at 10 Hz with varying amplitude at 10 Hz
Stiffness at 10 Hz with varying superimposed amplitude at 1 Hz
Figure 2.3: Dashed line; Component stiffness and loss angle at a single referenceharmonic signal of 10 Hz with varying amplitude. Solid line; Component stiff-ness and loss angle at 0.05 mm and 10 Hz reference signal superimposed with a1 Hz signal of various amplitudes.
Figure 2.4: Component stiffness at reference signal 0.05 mm with 50 Hz with asuperimposed noise signal of varying amplitude and cutoff frequency.
8 M. SJOBERG
2.2 TEMPERATURE DEPENDENCE
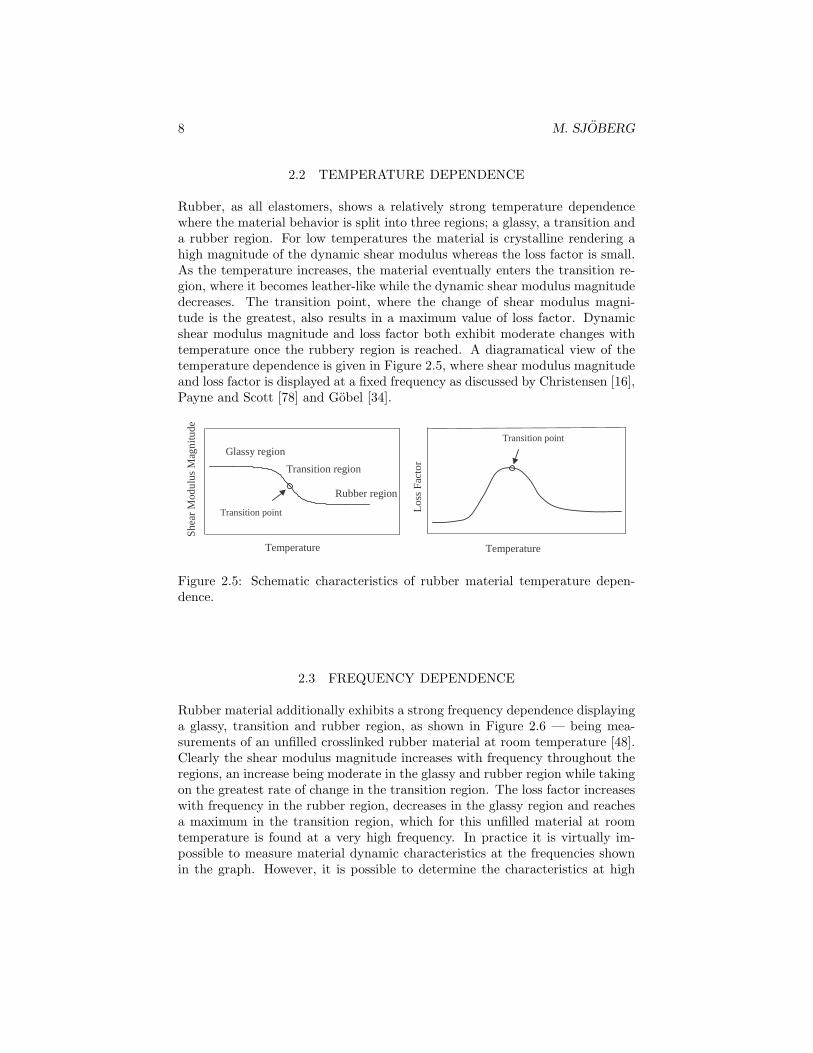
Rubber, as all elastomers, shows a relatively strong temperature dependencewhere the material behavior is split into three regions; a glassy, a transition anda rubber region. For low temperatures the material is crystalline rendering ahigh magnitude of the dynamic shear modulus whereas the loss factor is small.As the temperature increases, the material eventually enters the transition re-gion, where it becomes leather-like while the dynamic shear modulus magnitudedecreases. The transition point, where the change of shear modulus magni-tude is the greatest, also results in a maximum value of loss factor. Dynamicshear modulus magnitude and loss factor both exhibit moderate changes withtemperature once the rubbery region is reached. A diagramatical view of thetemperature dependence is given in Figure 2.5, where shear modulus magnitudeand loss factor is displayed at a fixed frequency as discussed by Christensen [16],Payne and Scott [78] and Gobel [34].
Temperature
She
ar M
odul
us M
agni
tude
Los
s F
acto
r
Glassy region
Temperature
Transition region
Rubber region
Transition point
Transition point
Figure 2.5: Schematic characteristics of rubber material temperature depen-dence.
2.3 FREQUENCY DEPENDENCE
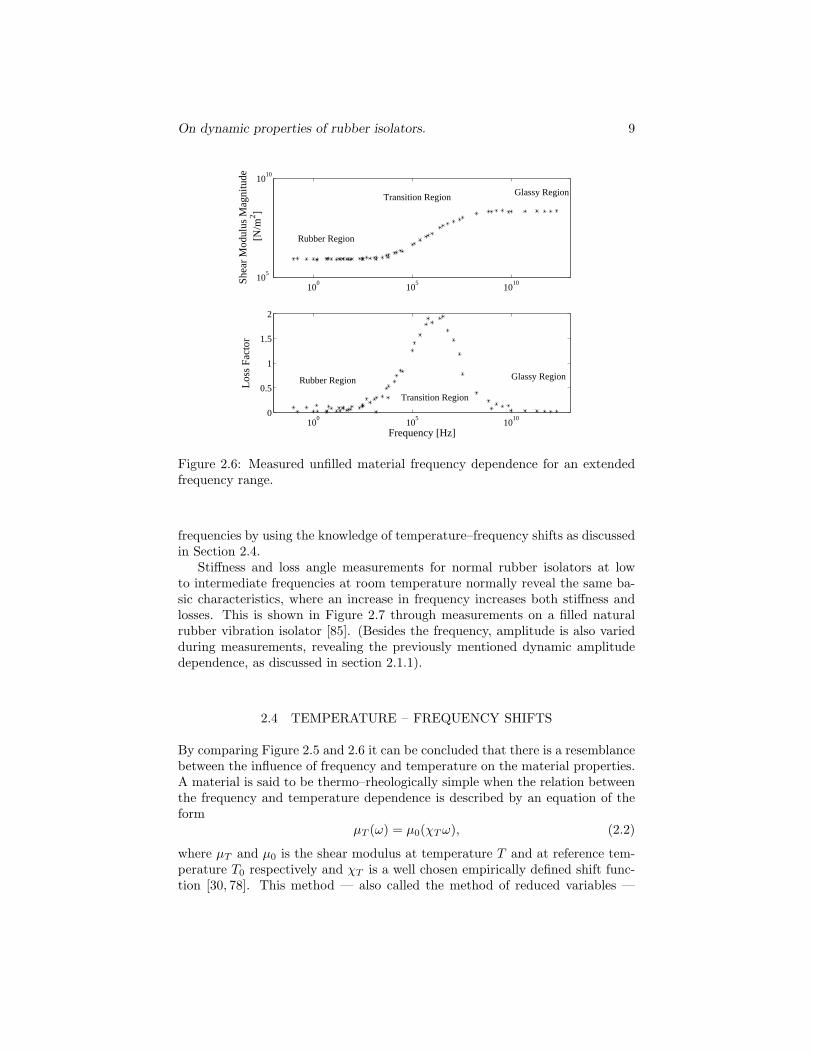
Rubber material additionally exhibits a strong frequency dependence displayinga glassy, transition and rubber region, as shown in Figure 2.6 — being mea-surements of an unfilled crosslinked rubber material at room temperature [48].Clearly the shear modulus magnitude increases with frequency throughout theregions, an increase being moderate in the glassy and rubber region while takingon the greatest rate of change in the transition region. The loss factor increaseswith frequency in the rubber region, decreases in the glassy region and reachesa maximum in the transition region, which for this unfilled material at roomtemperature is found at a very high frequency. In practice it is virtually im-possible to measure material dynamic characteristics at the frequencies shownin the graph. However, it is possible to determine the characteristics at high
On dynamic properties of rubber isolators. 9
100
105
1010
105
1010
Shea
r M
odul
us M
agni
tude
[N
/m2 ]
100
105
1010
0
0.5
1
1.5
2
Frequency [Hz]
Los
s Fa
ctor
Rubber Region
Glassy Region Transition Region
Transition Region
Rubber Region Glassy Region
Figure 2.6: Measured unfilled material frequency dependence for an extendedfrequency range.
frequencies by using the knowledge of temperature–frequency shifts as discussedin Section 2.4.
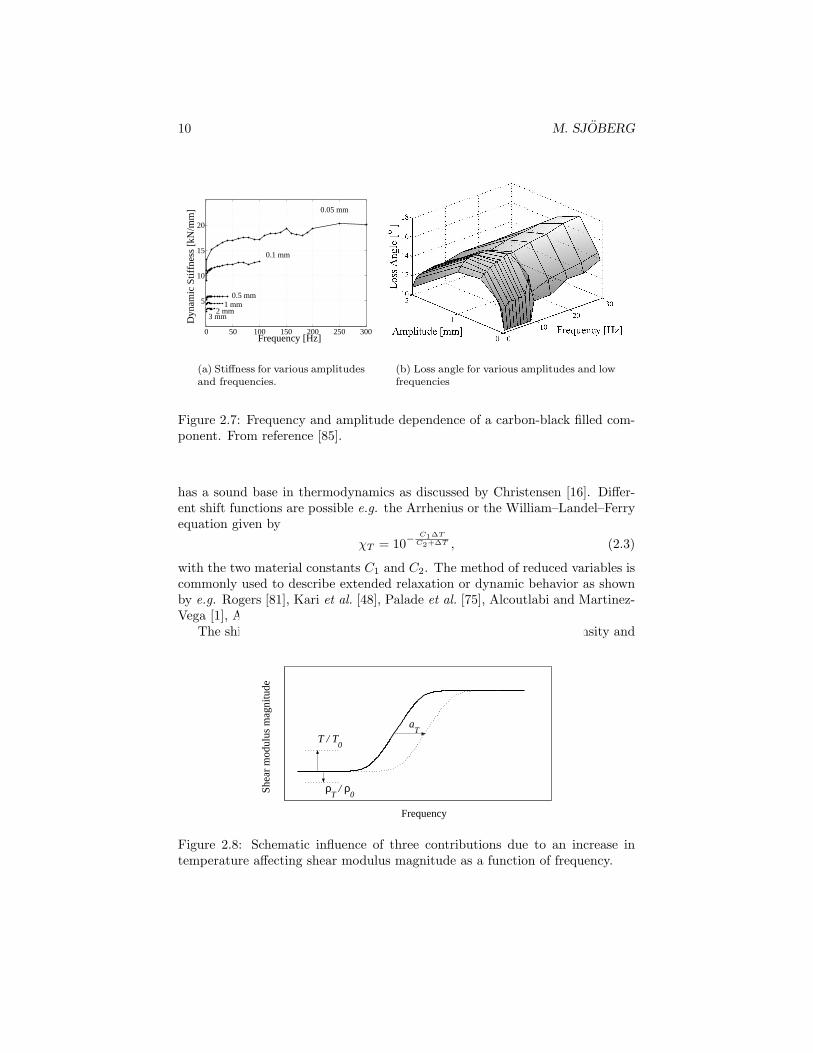
Stiffness and loss angle measurements for normal rubber isolators at lowto intermediate frequencies at room temperature normally reveal the same ba-sic characteristics, where an increase in frequency increases both stiffness andlosses. This is shown in Figure 2.7 through measurements on a filled naturalrubber vibration isolator [85]. (Besides the frequency, amplitude is also variedduring measurements, revealing the previously mentioned dynamic amplitudedependence, as discussed in section 2.1.1).
2.4 TEMPERATURE – FREQUENCY SHIFTS
By comparing Figure 2.5 and 2.6 it can be concluded that there is a resemblancebetween the influence of frequency and temperature on the material properties.A material is said to be thermo–rheologically simple when the relation betweenthe frequency and temperature dependence is described by an equation of theform
µT (ω) = µ0(χT ω), (2.2)
where µT and µ0 is the shear modulus at temperature T and at reference tem-perature T0 respectively and χT is a well chosen empirically defined shift func-tion [30, 78]. This method — also called the method of reduced variables —
10 M. SJOBERG
0 50 100 150 200 250 300
5
10
15
20
Frequency [Hz]
Dyn
amic
Stif
fnes
s [k
N/m
m] 0.05 mm
0.1 mm
0.5 mm 1 mm
2 mm 3 mm
(a) Stiffness for various amplitudesand frequencies.
(b) Loss angle for various amplitudes and lowfrequencies
Figure 2.7: Frequency and amplitude dependence of a carbon-black filled com-ponent. From reference [85].
has a sound base in thermodynamics as discussed by Christensen [16]. Differ-ent shift functions are possible e.g. the Arrhenius or the William–Landel–Ferryequation given by
χT = 10−C1∆T
C2+∆T , (2.3)
with the two material constants C1 and C2. The method of reduced variables iscommonly used to describe extended relaxation or dynamic behavior as shownby e.g. Rogers [81], Kari et al. [48], Palade et al. [75], Alcoutlabi and Martinez-Vega [1], Aprile et al. [2] and Bossemeyer [13].
The shift equation is frequently expanded to include changes of density and
Shea
r m
odul
us m
agni
tude
Frequency
T / T0
ρT / ρ
0
aT
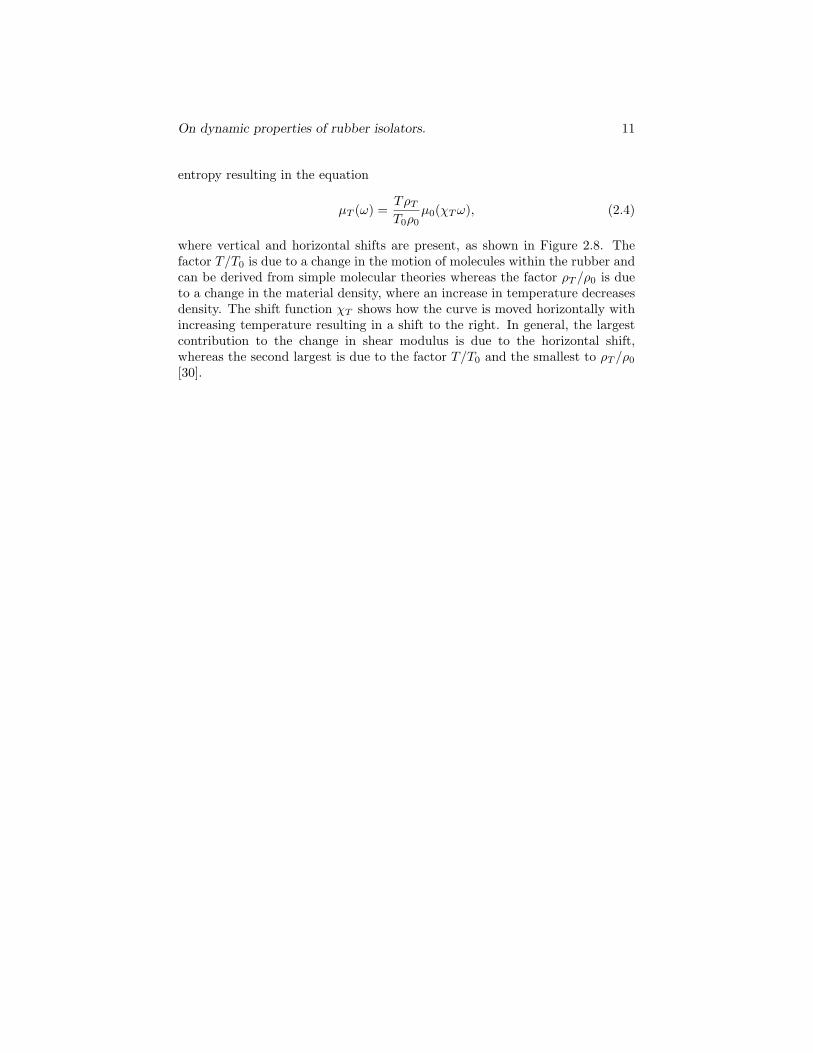
Figure 2.8: Schematic influence of three contributions due to an increase intemperature affecting shear modulus magnitude as a function of frequency.
On dynamic properties of rubber isolators. 11
entropy resulting in the equation
µT (ω) =TρT
T0ρ0µ0(χT ω), (2.4)
where vertical and horizontal shifts are present, as shown in Figure 2.8. Thefactor T/T0 is due to a change in the motion of molecules within the rubber andcan be derived from simple molecular theories whereas the factor ρT /ρ0 is dueto a change in the material density, where an increase in temperature decreasesdensity. The shift function χT shows how the curve is moved horizontally withincreasing temperature resulting in a shift to the right. In general, the largestcontribution to the change in shear modulus is due to the horizontal shift,whereas the second largest is due to the factor T/T0 and the smallest to ρT /ρ0
[30].
Chapter 3
Component modelling
As indicated by previous discussions, modelling dynamic properties of rubbercomponents is a rather complex task as numerous factors e.g. frequency, ampli-tude, ambient temperature and applied preload are likely to have major effectson the properties in question.
3.1 FREQUENCY DEPENDENCE
The simplest model of a rubber isolator accounting for both elastic and viscouseffects is the Kelvin-Voigt model where a linear elastic frequency independentstiffness is coupled in parallel with a viscous dashpot — where force is pro-portional to a first order time derivative of the displacement. As discussed byKnothe and Grassie [51] in their review on the modelling of railway tracks,this is the most widely encountered rubber material or component model. It isa fully linear representation omitting all amplitude dependent effects and dueto the viscous dashpot, it also strongly overestimates rubber high frequencylosses, a property which in fact shows a relatively weak frequency dependence,as discussed by Enelund and Olsson [26] and Fenander [29]. Additionally, itrepresents an infinite force response to a step displacement loading. Replacingthe dashpot with a Maxwell element, being a spring in series with the dashpot,normally results in better high frequency description of stiffness (thus remedyingthe step displacement force overestimation) but in a poor loss factor description.The resulting model, which is known as a three-parameter Maxwell model orthe standard linear solid, can be expanded through incorporating the general-ized Maxwell model, also known as the Wiechert model, obtaining improvedbroad band description. Although this technique’s popularity is shown throughits wide use [4, 12, 61, 73, 77] it nevertheless inevitably increases the number ofparameters to clearly describe elastomer dynamic behavior.
Other models employed to describe polymer viscoelastic behavior are themini-oscillator model [64], the Augmented Hooke’s law [22] and the anelastic
12

On dynamic properties of rubber isolators. 13
displacement fields [55]. All of these methods involve the concept of hiddenvariables.
3.1.1 Fractional derivatives
An efficient alternative in reducing the required number of model parameterswhile still obtaining a good description of viscoelastic materials’ or components’frequency dependence is by incorporating constitutive relations including frac-tional calculus, as discussed by Gaul [32]. Instead of integer order time deriva-tives, as in the case of the ordinary dashpot, those of non-integer order, known asfractional derivatives, are employed, although a formulation involving fractionalintegration is sometimes preferable, as it simplifies the handling of initial condi-tions [25]. Rossikhin and Shitikova [82] as well as Shimizu and Zhang [84] givethorough reviews of the use of fractional derivatives in the dynamic modellingof viscoelasticity.
Although the history of the mathematical concept of fractional calculus datesback to the seventeenth century, as described in a historical survey by Oldhamand Spanier [72], utilizing the tool for the description of viscoelasticity is morerecent. In the early nineteen eighties Bagley and Torvik [6] applied the toolfor describing material constitutive relations while solving equations of motion.Koeller [52] discusses fractional derivative components also known as spring-pots, which replace ordinary dashpots in viscoelastic models. Replacing theKelvin-Voigt’s dash-pot by a spring-pot results in a fractional Kelvin-Voigt,which is applied by Cosson and Michon [17] and Horr and Schmidt [41]. Itstime domain solutions are investigated by Yuan and Agrawal [94], Hwang andHsu [42] and Eldred et al. [24], the latter investigating numerical time-domainsolutions mentioning the aspects of history term truncation due to the nonlocal-ity of the fractional derivative operator. A time domain solution of the fractionalKelvin-Voigt is presented in Paper A – C, using the Grunwald definition whilealso including the dynamic amplitude dependence. The fractional standard lin-ear solid is used in references [6,17,32,67,76] and by Kari et al. [48] applying themodel to fit rubber dynamic material data of an extended frequency range sub-sequently calculating isolator behavior. Also in references [1,13,75,81] extendedfrequency material behavior using the method of reduced variables are combinedwith fractional representations while Aprile et al. [2] expand the theories to athermo-coupled problem while investigating structural dampers.
Time domain solutions of the fractional standard linear solid are investi-gated by Atanackovic [3], Schmidt and Gaul [83], Fenander [29], Enelund andOlsson [26] and Enelund et al. [27]. Enelund and Lesiuetre [28] also extendthe previously mentioned theory of anelastic displacement fields [55] to includefractional order equations for the anelastic strain. Extensions of the fractionaldifferential concept are discussed by Kari [46], Bagley [5] and Ingman and Suz-dalnitsky [43], while assuming the order of the derivative to be continuouslydistributed, temperature and time dependent, respectively. Fractional deriva-tive models in connection with thermodynamics are discussed by Lion [57].
14 M. SJOBERG
Displacement
Forc
e
Initial stiffness
Fully developed stiffness
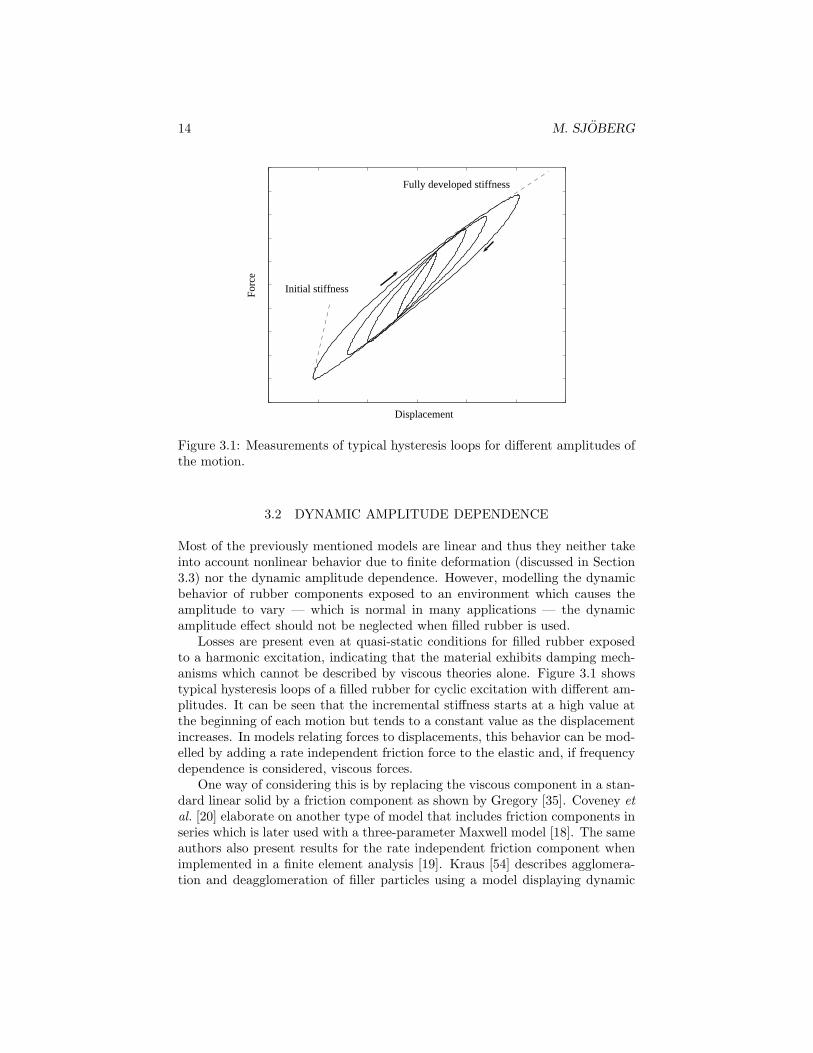
Figure 3.1: Measurements of typical hysteresis loops for different amplitudes ofthe motion.
3.2 DYNAMIC AMPLITUDE DEPENDENCE
Most of the previously mentioned models are linear and thus they neither takeinto account nonlinear behavior due to finite deformation (discussed in Section3.3) nor the dynamic amplitude dependence. However, modelling the dynamicbehavior of rubber components exposed to an environment which causes theamplitude to vary — which is normal in many applications — the dynamicamplitude effect should not be neglected when filled rubber is used.
Losses are present even at quasi-static conditions for filled rubber exposedto a harmonic excitation, indicating that the material exhibits damping mech-anisms which cannot be described by viscous theories alone. Figure 3.1 showstypical hysteresis loops of a filled rubber for cyclic excitation with different am-plitudes. It can be seen that the incremental stiffness starts at a high value atthe beginning of each motion but tends to a constant value as the displacementincreases. In models relating forces to displacements, this behavior can be mod-elled by adding a rate independent friction force to the elastic and, if frequencydependence is considered, viscous forces.
One way of considering this is by replacing the viscous component in a stan-dard linear solid by a friction component as shown by Gregory [35]. Coveney etal. [20] elaborate on another type of model that includes friction components inseries which is later used with a three-parameter Maxwell model [18]. The sameauthors also present results for the rate independent friction component whenimplemented in a finite element analysis [19]. Kraus [54] describes agglomera-tion and deagglomeration of filler particles using a model displaying dynamic
On dynamic properties of rubber isolators. 15
viscoelastic behavior based on the van der Waals potential. This model is laterused by Ulmer [90] and Vieweg et al. [91]. Kaliske and Rothert [45] describea friction model based on numerous Coulumb dampers in series with elasticsprings, a model expanded by Bruni and Collina [15], Austrell et al. [4] andBrackbill et al. [14] to include frequency dependence, giving good representa-tion of measured properties. A method to fit the often numerous parametersof the generalized Couloumb friction model is presented by Olsson and Aus-trell [73]. Dynamic amplitude dependence is modelled by Mallik et al. [63]through separating the restoring and damping forces, making both nonlinear,needing a total of eight parameters. Also the complex Bouc-Wen model, beinga nonlinear differential equation model, has been used to describe hystereticeffects [71]. Another model also taking into account the amplitude and a fre-quency dependence is presented by Barber [7] which however needs extensivemeasurements to properly adjust the numerous model parameters.
The rate independent friction component included in the model presentedin Paper A and further used in Paper B – C, shows a smooth behavior usingonly two parameters. This model, which is similar to the one presented byBerg [9–11], gives a good description of the measured characteristics.
3.3 FINITE DEFORMATION DEPENDENCE
Including long-term nonlinear behavior in the description of vibration isolatorsare performed by numerous references e.g. Ravindra and Mallik [80] or Natsiavasand Tratskas [70], where elastic restoring forces of the nonlinear Duffing-type areinvestigated. Focus of these works is on the analytical solution of the dynamicproblem, while the isolator properties are not necessarily obtained from realcomponents.
A suitable and straightforward approach, when focus is shifted to modelagreement with specific experimental observations of component properties, isto find an equation describing the preload–precompression curve, to be includedin the elastic modelling. This methodology is performed by Gjika et al. [33] whileinvestigating the response of a structure on rubber vibration isolators. A re-cent and comprehensive review of analytical elastic force models is presentedin reference [39]. In particular, nonlinear shape-factor based models, where theincreased shape factor, due to decreased isolator thickness during compressionis accounted for, showing improved representation [49, 56]. The former of themodels is a refinement of the latter displaying results for cylindrical isolatorsthat surprisingly well agree with those of a time consuming finite element com-putation using a Neo-Hookean hyperelasticity. Paper C utilizes the nonlinearmodel from reference [49] for describing finite elasticity thus resulting in anextension of the model in Paper A – B.
However, a convenient technique to include the preload dependence in con-stitutive relations sought for e.g. FE-implementation, is to assume hyper-elasticmaterial behavior using a strain energy function, while properly accounting for

16 M. SJOBERG
finite strain. Numerous variations of phenomenological strain energy functionsare found in the literature [8, 40] where Arruda–Boyce, Blatz–Ko, Mooney–Saunders, Mooney–Rivlin, Neo-Hooke, Yeoh and Ogden are a few examples.Zdunek and Bercovier [95] employ the Mooney–Rivlin model in the analysis ofa rubber bushing and a conical spring presenting results of load–compressioncurves. Investigating oscillatory motion superimposed on a finite deformationdue to preload, being a key issue, when modelling vibration isolators, is sim-plified by the assumption that time and prestrain effects are multiplicativelyseparable. Zdunek [96] uses this simplification with an equation relating thetime dependent relaxation function to the materials shear relaxation modulus,while solving the stiffness problem for vibration isolators. Kari [47] as well asKim and Youn [50] apply the concept of this time – prestrain separability wherethe latter draw conclusion that this is valid for unfilled materials and the for-mer applies distributed fractional representations of the short-term response.A different approach to an additive separability of the rate independent stressand a rate dependent overstress — modelled by a classical viscous dampingmodel — is found in [58, 59] where instead, a temperature dependence is in-cluded through a multiplicative split of the deformation gradient as proposedby Lu and Pister [62]. Later Lion expands the model by adding the dynamicamplitude dependence [60]. The frequency dependence is further modelled bya fractional standard linear solid in conjunction with hyperelastic models inreferences [38, 76] also being the description applied in Paper E, while addi-tionally accounting for the influence of temperature on component properties inthe complete audible frequency range.
Chapter 4
Presented models
4.1 MODEL IN PAPER A – C
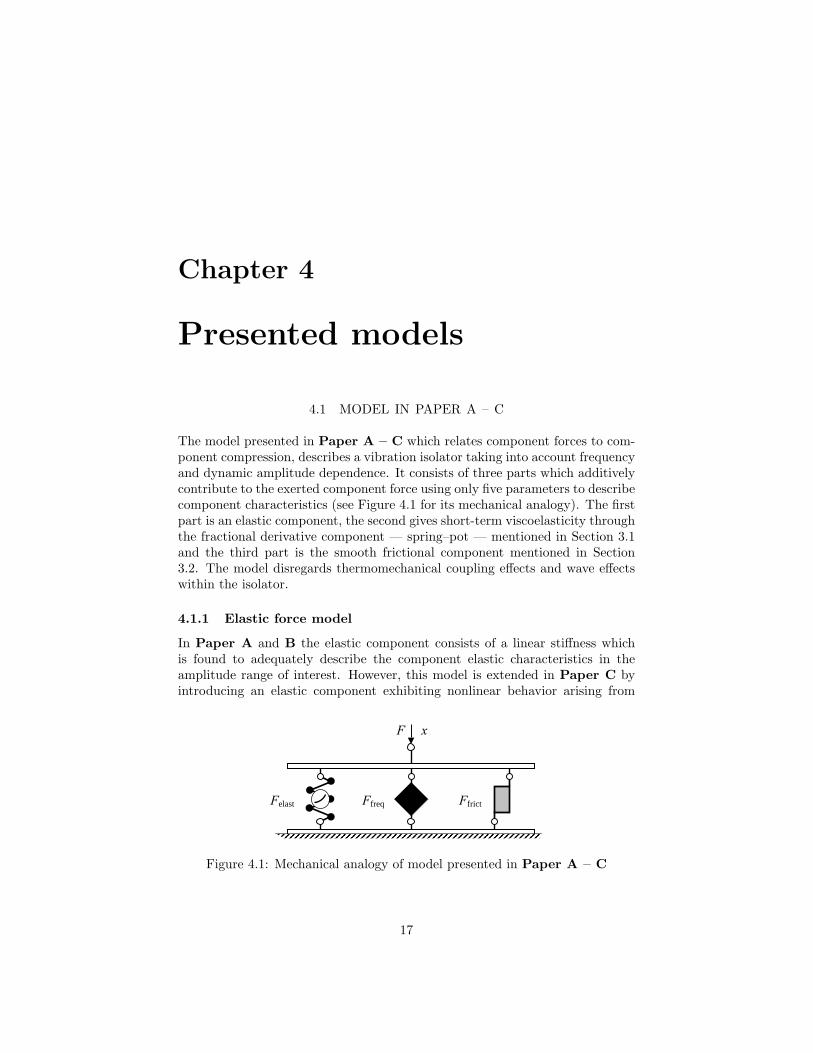
The model presented in Paper A – C which relates component forces to com-ponent compression, describes a vibration isolator taking into account frequencyand dynamic amplitude dependence. It consists of three parts which additivelycontribute to the exerted component force using only five parameters to describecomponent characteristics (see Figure 4.1 for its mechanical analogy). The firstpart is an elastic component, the second gives short-term viscoelasticity throughthe fractional derivative component — spring–pot — mentioned in Section 3.1and the third part is the smooth frictional component mentioned in Section3.2. The model disregards thermomechanical coupling effects and wave effectswithin the isolator.
4.1.1 Elastic force model
In Paper A and B the elastic component consists of a linear stiffness whichis found to adequately describe the component elastic characteristics in theamplitude range of interest. However, this model is extended in Paper C byintroducing an elastic component exhibiting nonlinear behavior arising from
)�����[
)elast )freq )frict
Figure 4.1: Mechanical analogy of model presented in Paper A – C
17

18 M. SJOBERG
geometrical and material nonlinearities associated with finite deformations. Ashape factor based theory is used to achieve an appropriately simplified modeltransforming the complex geometry of a preloaded cylindrical component intoa globally equivalent configuration [49]. The incremental elastic stiffness atcompression 0 ≤ x ¿ L is given by
Kelast =3πµ
4D2L
(L− x)2(1 +
D2
8L(L− x)
), (4.1)
resulting in the elastic compression force
Felast =3π
4µD2x
L− x
(1 +
D2(2L− x)16L2(L− x)
), (4.2)
for an isolator with original height L and diameter D made of a rubber materialusing a static shear modulus µ. This nonlinear behavior has been shown toagree surprisingly well with a time consuming finite element analysis [49].
4.1.2 Short term viscoelastic force model
The frequency dependence is described by a spring–pot where force is propor-tional to a non-integer time derivative Dα of the displacement
Ffreq = bDαx (4.3)
where 0 < α < 1 and b > 0 are model constants. The main advantage of themodel being the minimum parameter number required for a broad frequencyband fit to rubber component measurements. The short-term viscoelastic forceat time tn = n∆t is obtained through the Grunwald definition as
Ffreq(tn) = bDαxn ≈ b4t−α
Γ(−α)
n−1∑
j=0
Γ(j − α)Γ(j + 1)
xn−j , (4.4)
where Γ denotes the Gamma function. Apparently the fractional derivativeoperator is a nonlocal operator in temporal sense for 0 < α < 1; that is, thefractional derivative depends on the displacement history — not only on thecurrent value — in line with components made of materials with memory e.g.rubber isolators.
4.1.3 Friction force model
The model describing friction in this work displays the smooth characteristicsfound through measurements as shown in Paper A and B hereby enablinga good fit to force–deflection curves. The friction force develops gradually,following the equation
Ffrict = Ffs +x− xs
x2(1− µ) + (x− xs)(Ffmax − Ffs), (4.5)

On dynamic properties of rubber isolators. 19
for a motion in increasing x-direction and
Ffrict = Ffs +x− xs
x2(1 + µ)− (x− xs)(Ffmax + Ffs), (4.6)
for a motion in decreasing x-direction. The two parameters defined by the userare the maximum friction force Ffmax and a displacement parameter x2 givingthe rate of friction force development.
The parameters Ffs and xs are updated each time the displacement changesdirection at x = 0 as Ffs ← Ffrict|x=0 and xs ← x|x=0. Clearly, the friction forceis independent of compression displacement rate magnitude while developingnonlinearly and gradually with compression displacement.
4.1.4 Total force model
A straightforward evaluation of exerted component force using Equation 4.2 –4.6, resulting in a total force
Ftot(tn) = Ffreq
(x(tn)
)+ Felast
(x(tn)
)+ Ffrict
(x(tn)
), (4.7)
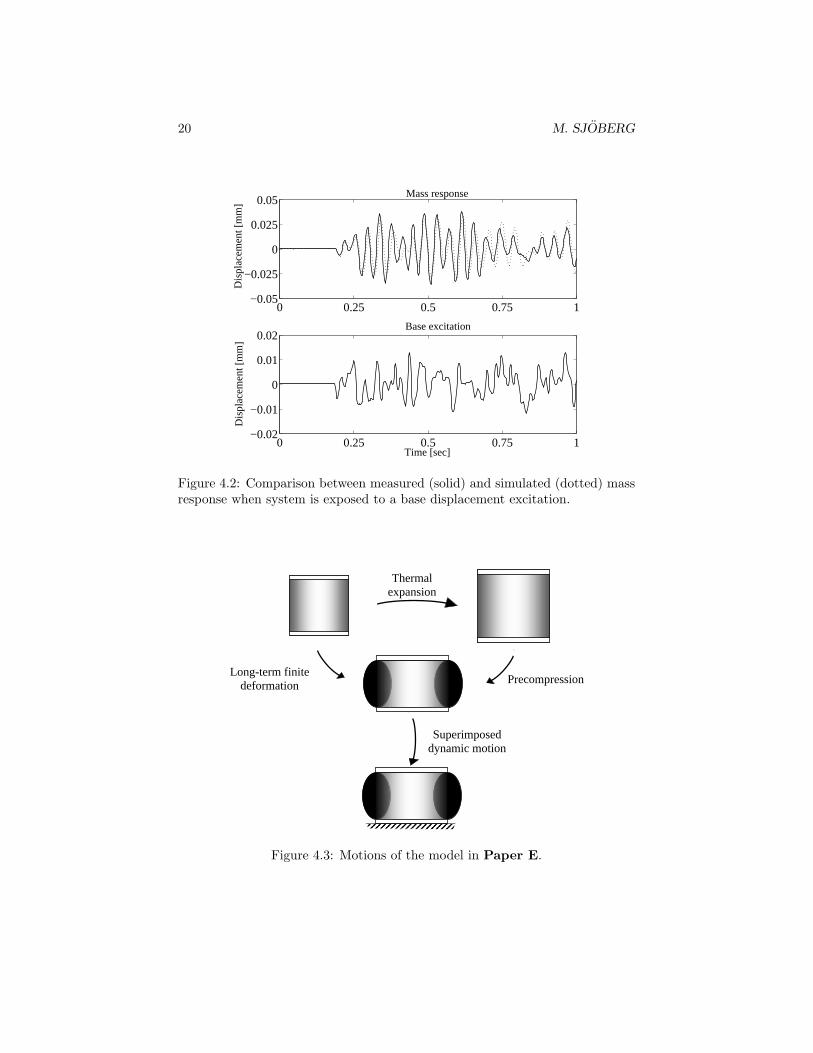
is possible when the model is excited by prescribed displacements. However, aNewmark algorithm is used to calculate resulting displacements from the equa-tions of motion when the model is included in a dynamic system with externalexcitation, as described in Paper A. Paper B brings the model verificationone step further as the response of a one degree of freedom system (with a rub-ber isolator acting as a resilient component between a mass and a displacementexcited base) is experimentally investigated and compared to simulations. InFigure 4.2 a time sequence of measured base excitation and corresponding massresponse is shown together with those of simulations.
By using the smooth friction description from Equation 4.5 - 4.6 this modelshows an improved dynamic amplitude description compared to the models inreferences [4,45,73] while it simultaneously reduces the number of model parame-ters. The novel solution of including a fractional Kelvin-Voigt for the descriptionof viscoelastic behavior in conjunction with the smooth friction model, extendsthe applicable frequency range normally seen for this type of model, [4, 9, 10].Additionally, an even more versatile model for description of vibration isolatorsis obtained through extending the model to include nonlinear finite compressionbehavior, as shown in Paper C.
4.2 MODEL IN PAPER E
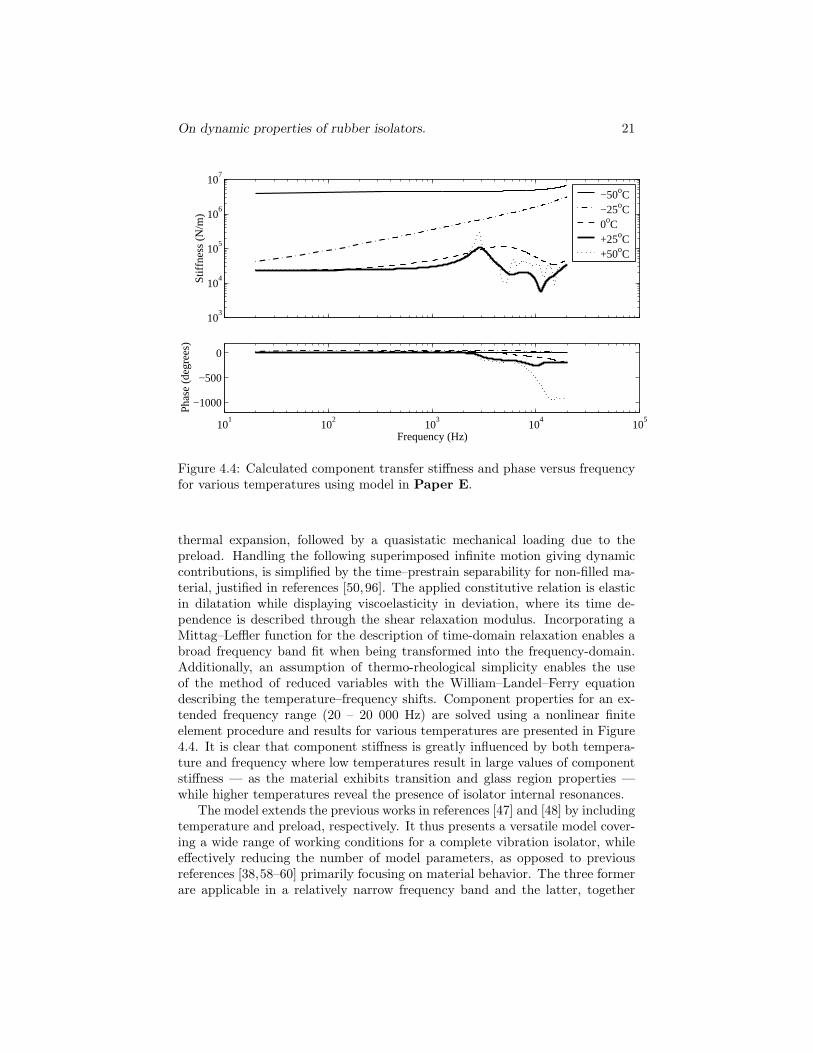
The model presented in Paper E takes into account a frequency, precompres-sion and temperature dependence of a vibration isolator while being confined toisothermal conditions. Applied for the long-term finite deformation response isan extended neo-Hookean strain energy function, being directly proportional tothe temperature and density. This motion is decomposed into a homogeneous
20 M. SJOBERG
0 0.25 0.5 0.75 1−0.05
−0.025
0
0.025
0.05
Dis
plac
emen
t [m
m]
0 0.25 0.5 0.75 1−0.02
−0.01
0
0.01
0.02
Time [sec]
Dis
plac
emen
t [m
m]
Mass response
Base excitation
Figure 4.2: Comparison between measured (solid) and simulated (dotted) massresponse when system is exposed to a base displacement excitation.
T
T0
Thermalexpansion
Precompression
Superimposeddynamic motion
Long-term finitedeformation
Figure 4.3: Motions of the model in Paper E.
On dynamic properties of rubber isolators. 21
103
104
105
106
107
Stif
fnes
s (N
/m)
−50oC−25oC0oC +25oC+50oC
101
102
103
104
105
−1000
−500
0
Pha
se (
degr
ees)
Frequency (Hz)
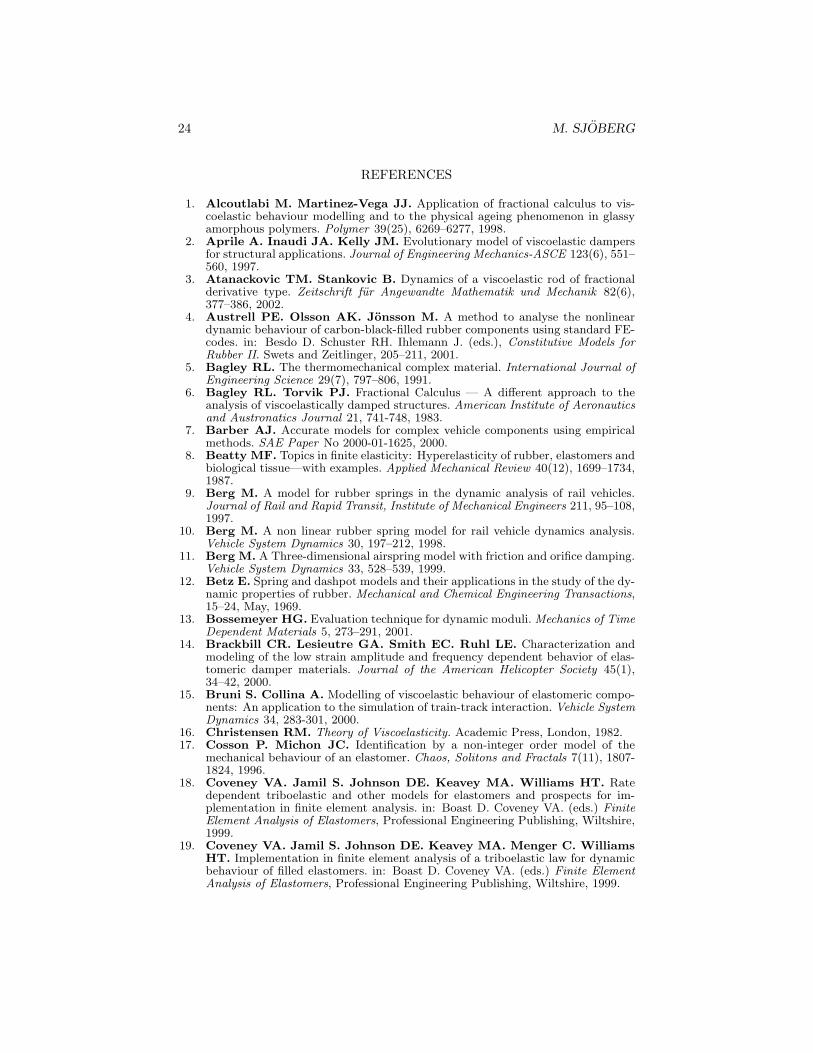
Figure 4.4: Calculated component transfer stiffness and phase versus frequencyfor various temperatures using model in Paper E.
thermal expansion, followed by a quasistatic mechanical loading due to thepreload. Handling the following superimposed infinite motion giving dynamiccontributions, is simplified by the time–prestrain separability for non-filled ma-terial, justified in references [50,96]. The applied constitutive relation is elasticin dilatation while displaying viscoelasticity in deviation, where its time de-pendence is described through the shear relaxation modulus. Incorporating aMittag–Leffler function for the description of time-domain relaxation enables abroad frequency band fit when being transformed into the frequency-domain.Additionally, an assumption of thermo-rheological simplicity enables the useof the method of reduced variables with the William–Landel–Ferry equationdescribing the temperature–frequency shifts. Component properties for an ex-tended frequency range (20 – 20 000 Hz) are solved using a nonlinear finiteelement procedure and results for various temperatures are presented in Figure4.4. It is clear that component stiffness is greatly influenced by both tempera-ture and frequency where low temperatures result in large values of componentstiffness — as the material exhibits transition and glass region properties —while higher temperatures reveal the presence of isolator internal resonances.
The model extends the previous works in references [47] and [48] by includingtemperature and preload, respectively. It thus presents a versatile model cover-ing a wide range of working conditions for a complete vibration isolator, whileeffectively reducing the number of model parameters, as opposed to previousreferences [38,58–60] primarily focusing on material behavior. The three formerare applicable in a relatively narrow frequency band and the latter, together

22 M. SJOBERG
with [76], extend the frequency applicability, however omitting temperature de-pendence.

Chapter 5
Future Research
The presented work is believed to enlighten the working conditions impact onthe dynamic properties of rubber vibration isolators while additionally takingsome of these most important features into account in the presented models.Nevertheless there are possible extensions to the presented work which include
• Linearizing the model in Paper A – C, (i.e linearizing the friction forcemodel,) for various working conditions. This would simplify stiffness andloss angle evaluation e.g. for extraction of parameters for alternative rub-ber component models.
• Including a temperature dependence and a thermodynamic coupling effectto the model in Paper A – C. This would mean that monitoring theeffects of changes to the dynamic properties due to internal dissipationcould be investigated.
• Investigating the reasons for the loss angle behavior for dual signal exci-tation in Paper D.
• Including the dynamic amplitude dependence to the model in Paper Ehereby improving the model versatility.
23
24 M. SJOBERG
REFERENCES
1. Alcoutlabi M. Martinez-Vega JJ. Application of fractional calculus to vis-coelastic behaviour modelling and to the physical ageing phenomenon in glassyamorphous polymers. Polymer 39(25), 6269–6277, 1998.
2. Aprile A. Inaudi JA. Kelly JM. Evolutionary model of viscoelastic dampersfor structural applications. Journal of Engineering Mechanics-ASCE 123(6), 551–560, 1997.
3. Atanackovic TM. Stankovic B. Dynamics of a viscoelastic rod of fractionalderivative type. Zeitschrift fur Angewandte Mathematik und Mechanik 82(6),377–386, 2002.
4. Austrell PE. Olsson AK. Jonsson M. A method to analyse the nonlineardynamic behaviour of carbon-black-filled rubber components using standard FE-codes. in: Besdo D. Schuster RH. Ihlemann J. (eds.), Constitutive Models forRubber II. Swets and Zeitlinger, 205–211, 2001.
5. Bagley RL. The thermomechanical complex material. International Journal ofEngineering Science 29(7), 797–806, 1991.
6. Bagley RL. Torvik PJ. Fractional Calculus — A different approach to theanalysis of viscoelastically damped structures. American Institute of Aeronauticsand Austronatics Journal 21, 741-748, 1983.
7. Barber AJ. Accurate models for complex vehicle components using empiricalmethods. SAE Paper No 2000-01-1625, 2000.
8. Beatty MF. Topics in finite elasticity: Hyperelasticity of rubber, elastomers andbiological tissue—with examples. Applied Mechanical Review 40(12), 1699–1734,1987.
9. Berg M. A model for rubber springs in the dynamic analysis of rail vehicles.Journal of Rail and Rapid Transit, Institute of Mechanical Engineers 211, 95–108,1997.
10. Berg M. A non linear rubber spring model for rail vehicle dynamics analysis.Vehicle System Dynamics 30, 197–212, 1998.
11. Berg M. A Three-dimensional airspring model with friction and orifice damping.Vehicle System Dynamics 33, 528–539, 1999.
12. Betz E. Spring and dashpot models and their applications in the study of the dy-namic properties of rubber. Mechanical and Chemical Engineering Transactions,15–24, May, 1969.
13. Bossemeyer HG. Evaluation technique for dynamic moduli. Mechanics of TimeDependent Materials 5, 273–291, 2001.
14. Brackbill CR. Lesieutre GA. Smith EC. Ruhl LE. Characterization andmodeling of the low strain amplitude and frequency dependent behavior of elas-tomeric damper materials. Journal of the American Helicopter Society 45(1),34–42, 2000.
15. Bruni S. Collina A. Modelling of viscoelastic behaviour of elastomeric compo-nents: An application to the simulation of train-track interaction. Vehicle SystemDynamics 34, 283-301, 2000.
16. Christensen RM. Theory of Viscoelasticity. Academic Press, London, 1982.17. Cosson P. Michon JC. Identification by a non-integer order model of the
mechanical behaviour of an elastomer. Chaos, Solitons and Fractals 7(11), 1807-1824, 1996.
18. Coveney VA. Jamil S. Johnson DE. Keavey MA. Williams HT. Ratedependent triboelastic and other models for elastomers and prospects for im-plementation in finite element analysis. in: Boast D. Coveney VA. (eds.) FiniteElement Analysis of Elastomers, Professional Engineering Publishing, Wiltshire,1999.
19. Coveney VA. Jamil S. Johnson DE. Keavey MA. Menger C. WilliamsHT. Implementation in finite element analysis of a triboelastic law for dynamicbehaviour of filled elastomers. in: Boast D. Coveney VA. (eds.) Finite ElementAnalysis of Elastomers, Professional Engineering Publishing, Wiltshire, 1999.
On dynamic properties of rubber isolators. 25
20. Coveney VA. Johnson DE. Turner DM. A triboelastic model for the cyclicmechanical behaviour of filled vulcanizates. Rubber Chemistry and Technology68, 660–670, 1995.
21. Dean GD. Duncan JC. Johnson AF. Determination of nonlinear dynamicproperties of carbon-filled rubbers. Polymer Testing 4(2-4), 225–249, 1984.
22. Dovstam K. Augmented Hookes law in the frequency domain. A three dimen-sional material damping formulation. International Journal of Solids and Struc-tures 32(19), 2835–2852, 1995.
23. Drozdov AD. Fractional differential models in finite viscoelasticity. Acta Me-chanica 124, 155–180, 1997.
24. Eldred LB. Baker WP. Palazotto AN. Numerical application of fractionalderivative model Constitutive Relations for Viscoelastic Materials. Computersand Structures 60(6), 875–882, 1996.
25. Enelund M. Fenander A. Olsson P. Fractional integral formulation of con-stitutive equations of viscoelasticity. American Institute of Aeronautics and As-tronautics Journal 35(8), 1356–1362, 1997.
26. Enelund M. Olsson P. Damping described by fading memory — analysis andapplication to fractional derivative models. International Journal of Solids andStructures 36, 939–970, 1999.
27. Enelund M. Mahler L. Runesson K. Josefson BL. Formulation and inte-gration of the standard linear viscoelastic solid with fractional order rate laws.International Journal of Solids and Structures 36, 2417–2442, 1999.
28. Enelund M. Lesieutre GA. Time domain modeling of damping using anelasticdisplacement fields and fractional calculus. International Journal of Solids andStructures 36, 4447–4472, 1999.
29. Fenander A. Modal synthesis when modelling damping by use of fractionalderivatives. American Institute of Aeronautics and Astronautics Journal 34(5),1051–1058, 1996.
30. Ferry JD. Viscoelastic Properties of Polymers. John Wiley and Sons, New York,1980.
31. Freakly PK. Payne AR. Theory and Practice of Engineering with Rubber.Applied Science Publishers LTD, London, 1978.
32. Gaul L. The influence of damping on waves and vibrations. Mechanical Systemsand Signal Processing 13, 1–30, 1999.
33. Gjika K. Dufour R. Ferraris G. Transient response of structures on viscoelas-tic or elastoplastic mounts: prediction and experiments. Journal of Sound andVibration 198(3), 361–278, 1996.
34. Gobel EF. Rubber Springs Design, Newnes-Butterworths, London, 1974.35. Gregory MJ. Dynamic properties of rubber in automotive engineering. Elas-
tomerics 117(11), 19–24, 1985.36. Harris JA. Dynamic testing under nonsinusiodal conditions and the conse-
quences of nonlinearity for service performance. Rubber Chemistry and Tech-nology 60(5), 870–887, 1987.
37. Harris J. Stevenson A. On the role of nonlinearity in the dynamic behaviourof rubber components. Rubber Chemistry and Technology 59(5), 740–764, 1986.
38. Haupt P. Lion A. Bachaus E. On the dynamic behaviour of polymers underfinite strains: constitutive modelling and identification of parameters. Interna-tional Journal of Solids and Structures 37, 3633–3646, 2000.
39. Hill JM. A review of partial solutions of finite elasticity and their applications.International Journal of Nonlinear Mechanics 36, 447–463, 2001.
40. Holzapfel GA. Nonlinear Solid Mechanics. John Wiley and Sons, England,2000.
41. Horr AM. Schmidt LC. A fractional–spectral method for vibration of dampedspace structures. Engineering Structures 18(12), 947–956, 1996.
42. Hwang JS. Hsu TY. A fractional derivative model to include effect of ambienttemperature on HDR bearings. Engineering Structures 23, 484-490, 2001.
43. Ingman D. Suzdalnitsky J. Iteration method for equation of viscoelastic mo-

26 M. SJOBERG
tion with fractional differential operator of damping. Computer Methods in Ap-plied Mechanics and Engineering 190, 5027–5036, 2001.
44. Jurado FJ. Mateo A. Gil-Negrete N. Vinolas J. Kari L. Testing and FEmodelling of the dynamic properties of carbon black filled rubber. In: Proceedingsof EAEC 99, Barcelona, 1999.
45. Kaliske M. Rothert H. Constitutive approach to rate-independent propertiesof filled elastomers. International Journal of Solids and Structures 35(17), 2057–2071, 1998.
46. Kari L. On the waveguide modelling of dynamic stiffness of cylindrical vibrationisolators. Part 1: The model solution and experimental comparison. Journal ofSound and Vibration 244(2), 211–233, 2001.
47. Kari L. Modelling the audible stiffness of preloaded vibration isolators. in: BesdoD. Schuster RH. Ihlemann J. (eds.), Constitutive Models for Rubber II. Swets andZeitlinger, 285–295, 2001.
48. Kari L. Eriksson P. Stenberg B. Dynamic stiffness of natural rubber cylindersin the audible frequency range using wave guides. Kautschuk Gummi Kunststoffe54(3), 106–113, 2001.
49. Kari L. The nonlinear temperature dependent stiffness of precompressed rubbercylinders. Kautschuk Gummi Kunststoffe 55(3), 76–81, 2002.
50. Kim BK. Youn SK. A viscoelastic constitutive model of rubber under smalloscillatory load superimposed on large static deformation. Archive of AppliedMechanics 71, 748–763, 2001.
51. Knothe KL. Grassie SL. Modelling of railway track and vehicle/track inter-action at high frequencies. Vehicle System Dynamics 22, 209–262, 1993.
52. Koeller RC. Applications of fractional calculus to the theory of viscoelasticity.Journal of Applied Mechanics 51, 299-307, 1984.
53. Kooijman P. Verheij J. Dynamic stiffness and damping variation in elastic railpads during wheel passages and its influence on track noise. In: Proceedings of the6th International Conference of Sound and Vibration, Copenhagen, 2653–2660,1999.
54. Kraus G. Mechanical losses in carbon-black-filled rubbers. Journal of AppliedPolymer Science: Applied Polymer Symposium 39, 75–92, 1984.
55. Lesieutre G. Bianchini E. Time domain modeling of linear viscoelasticityusing anelastic displacement fields. ASME Journal of Vibration and Acoustics117, 424–430, 1995.
56. Lindley PB. Load-compression relationships of rubber units. Journal of StrainAnalysis 1, 190–195, 1966.
57. Lion A. On the thermodynamics of fractional damping elements. ContinuumMechanics and Thermodynamics 9, 83–96, 1997.
58. Lion A. On the large deformation behaviour of reinforced rubber at differenttemperatures. Journal of Mechanical Physics and Solids 45(11/12), 1805–1834,1997.
59. Lion A. A physically based method to represent the thermo-mechanical be-haviour of elastomers. Acta Mechanica 123(1-4), 1–25, 1997.
60. Lion A. Thixotropic behaviour of rubber under dynamic loading histories: ex-periments and theory. Journal of Mechanical Physics and Solids 46(5), 895–930,1998.
61. Lodhia BB. Esat II. Vibration simulation of systems incorporating linear vis-coelastic mounts using prony series formulation. In: Proceedings of EngineeringSystems Design and Analysis Conference, ASME 81(9), 171–176, 1996.
62. Lu SCH. Pister KD. Decomposiotion of deformation and representation of thefree energy function for isotropic thermoelastic solids. International Journal ofSolids and Structures 11, 927–934, 1975.
63. Mallik AK. Kher V. Puri M. Hatwal H. On the modelling of nonlinearelastomeric vibration isolators. Journal of Sound and Vibration 219(2), 239–253,1999.
64. McTavish DJ. Hughes PC. Modeling of linear viscoelastic space structures.

On dynamic properties of rubber isolators. 27
Journal of Vibration and Acoustics 115, 2110–2119, 1993.65. Medalia AI. Kraus G. Reinforcement of elastomers by particulate fillers. In:
Mark JE. Erman B. Eirich FR. (eds.), Science and Technology of Rubber Aca-demic Press, San Diego, 387–418, 1994.
66. Medalia AI. Effects of carbon black on dynamic properties of rubber. RubberChemistry and Technology 51, 437-523, 1978.
67. Moreau X. Ramus–Serment C. Oustaloup A. Fractional differentiation inpassive vibration control. Nonlinear Dynamics 29, 343–362, 2002.
68. Mullins L. Mechanical behaviour of polymers — Accomplishments and prob-lems. in: Hepburn C. Reynolds RJW. (eds.), Criteria for Engineering Design,Applied Science Publishers, 1–18, 1979.
69. Mullins L. Softening of rubber by deformation. Rubber Chemistry and Technol-ogy 42, 339–362, 1969.
70. Natsiavas S. Tratskas P. On vibration isolation of mechanical systems withnonlinear foundations. Journal of Sound and Vibration 194(2), 173–185, 1996.
71. Ni YQ. Ko JM. Wong CW. Identification of nonlinear hysteretic isolatorsfrom periodic vibration tests. Journal of Sound and Vibration 217(4), 737–756,1998.
72. Oldham KB. Spanier J. The Fractional Calculus. Academic press, New Yorkand London, 1974.
73. Olsson AK. Austrell PE. A fitting procedure for a viscoelastic-elastoplasticmaterial model. in: Besdo D. Schuster RH. Ihlemann J. (eds.), Constitutive Mod-els for Rubber II. Swets and Zeitlinger, 205–211, 2001.
74. Onogi S. Matsumoto T. Rheological properties of polymer solutions and meltscontaining suspended particles. Polymer Engineering Reviews, 1, 45–87, 1981.
75. Palade LI. Verney V. Attane P. A modified fractional model to describethe entire viscoelastic behaviour of polybutadienes from flow to glassy regime.Rheologica Acta 35, 265–273, 1996.
76. Papoulia KD. Kelly JM. Visco-hyperelastic model for filled rubbers used in vi-bration isolation. Journal of Enginnering Materials and Technology 119(3), 292–297, 1997.
77. Park SW. Analytical modeling of viscoelastic dampers for structural and vibra-tion control. International Journal of Solids and Structures 36, 939–970, 2001.
78. Payne AR. Scott JR. Engineering Design with Rubber. Maclaren and Sons,LTD, New York, 1960.
79. Payne AR. Whittaker RE. Low strain dynamic properties of filled rubbers.Rubber Chemistry and Technology 44, 440–478, 1971.
80. Ravindra B. Mallik AK. Hard Duffing-type vibration isolator with combinedCoulomb and viscous damping. International Journal of Nonlinear Mechanics28, 427–440, 1993.
81. Rogers L. Operators and fractional derivaties for viscoelastic constitutive equa-tions. Journal of Rheology 27(4), 351–372, 1983.
82. Rossikhin YA. Shitikova MV. Applications of fractional calculus to dynamicproblems of linear and nonlinear hereditary mechanics of solids. Applied Mechan-ical Review 50(1), 1997.
83. Schmidt A. Gaul L. Finite element formulation of viscoelastic constitutiveequations using fractional time derivatives. Nonlinear Dynamics 29, 37–55, 2002.
84. Shimizu N. Zhang W. Fractional calculus approach to dynamic problems ofviscoelastic materials. Japaneese Society of Mechanical Engineers C, 42, No 4,1999.
85. Sjoberg M. Dynamic behaviour of a rubber component in the low frequencyrange — Measurements and modelling. In: Proceedings of the 7th InternationalConference of Sound and Vibration, Garmisch-Partenkirchen, (5), 2955–2962,2000.
86. Sommer JG. Meyer DA. Factors controlling the dynamic properties of elas-tomeric products. SAE Paper No 730267, 1973.
87. Tariq S. Giacomin AJ. Gunasekaran S. Nonlinear viscoelasticity of cheese.

28 M. SJOBERG
Biorheology 35(3), 171–191, 1998.88. Treloir LRG. The Physics of Rubber Elasticity. Clarendon Press, Oxford 1975.89. Turner DM. Boast D. Marfell M. Changes in the behaviour of rubber com-
ponents as a consequence of real road conditions. In: C577/019/2000, IMechEConference Transactions — Vehicle Noise and Vibration 33–41, 2000.
90. Ulmer JD. Strain dependence of dynamic mechanical properties of carbon blackfilled rubber compounds. Rubber Chemistry and Technology 69, 15–47, 1995.
91. Vieweg S. Unger R. Schroter K. Donth E. Frequency and temperaturedependence of the small strain behaviour of carbon black filled vulcanizates.Polymer Networks Blends 5(4) 199–204, 1995.
92. Wang MJ. Patterson WJ. Ouyang GB. Dynamic stress-softening of filledvulcanizates. Kautschuk Gummi Kunststoffe 51(2),106–121, 1998.
93. Wang MJ. Effect of polymer–filler and filler–filler interactions on dynamic prop-erties of filled vulcanizates. Rubber Chemistry and Technology 71(3), 520–589,1998.
94. Yuan L. Agrawal OP. A numerical scheme for dynamic systems containingfractional derivatives. Journal of Vibration and Acoustics 124, 321–324, 2002.
95. Zdunek AB. Bercovier M. Numerical evaluation of finite element methodsfor rubber parts. SAE Paper No 860817, 1986.
96. Zdunek AB. Theory and computation of the steady state harmonic responseof viscoelastic rubber parts. Computer Methods in Applied Mechanics and Engi-neering 105(1), 63–92, 1993.