Embed Size (px)
Citation preview
Operating Systems PrinciplesProcess Management and Coordination
Lecture 5:Process and Thread Scheduling
主講人:虞台文
Content
Organization of Schedulers – Embedded and Autonomous Schedulers – Priority Scheduling
Scheduling Methods – A Framework for Scheduling – Common Scheduling Algorithms – Comparison of Methods
Priority Inversion
Operating Systems PrinciplesProcess Management and Coordination
Lecture 5:Process and Thread Scheduling
Organization of Schedulers
Process Scheduling/Dispatching
Process scheduling– Long term scheduling– Move process to Ready List (“RL”) after
creation (When and in which order?)
Process Dispatching– Short term scheduling– Select process from Ready List to run
We use “scheduling” to refer to both.
Organization of Schedulers
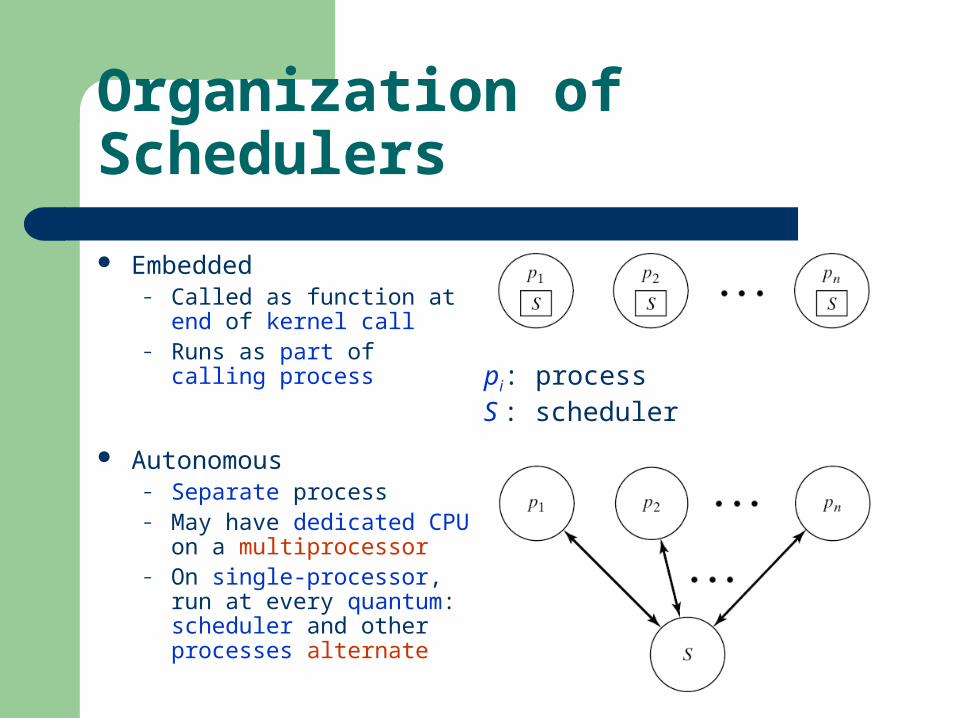
Embedded– Called as function at
end of kernel call– Runs as part of calling
process
Autonomous– Separate process– May have dedicated
CPU on a multiprocessor– On single-processor,
run at every quantum:scheduler and other processes alternate
pi: processS : scheduler
Organization of Schedulers
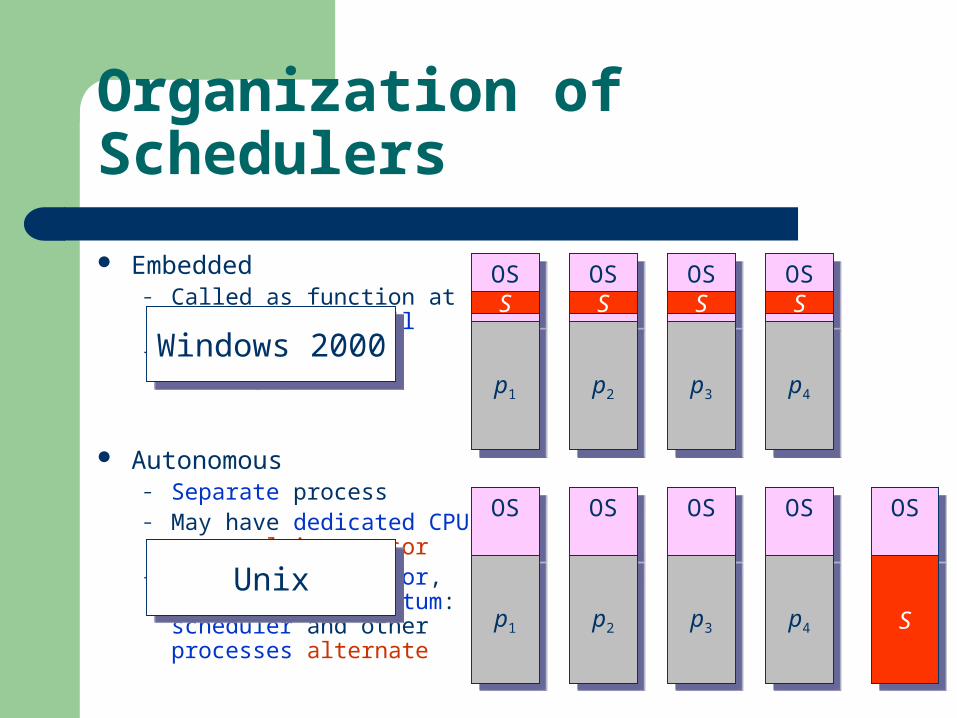
Embedded– Called as function at
end of kernel call– Runs as part of calling
process
Autonomous– Separate process– May have dedicated
CPU on a multiprocessor– On single-processor,
run at every quantum:scheduler and other processes alternate
OSOS
p1p1
SOSOS
p2p2
SOSOS
p3p3
SOSOS
p4p4
S
OSOS
p1p1
OSOS
p2p2
OSOS
p3p3
OSOS
p4p4
OSOS
SSUnixUnix
Windows 2000Windows 2000
Priority Scheduling
Priority function returns numerical value P for process p:
P = Priority(p)
Static priority: unchanged for lifetime of p Dynamic priority: changes at runtime
Who runs next?Based on priority
Priority-Leveled Processes
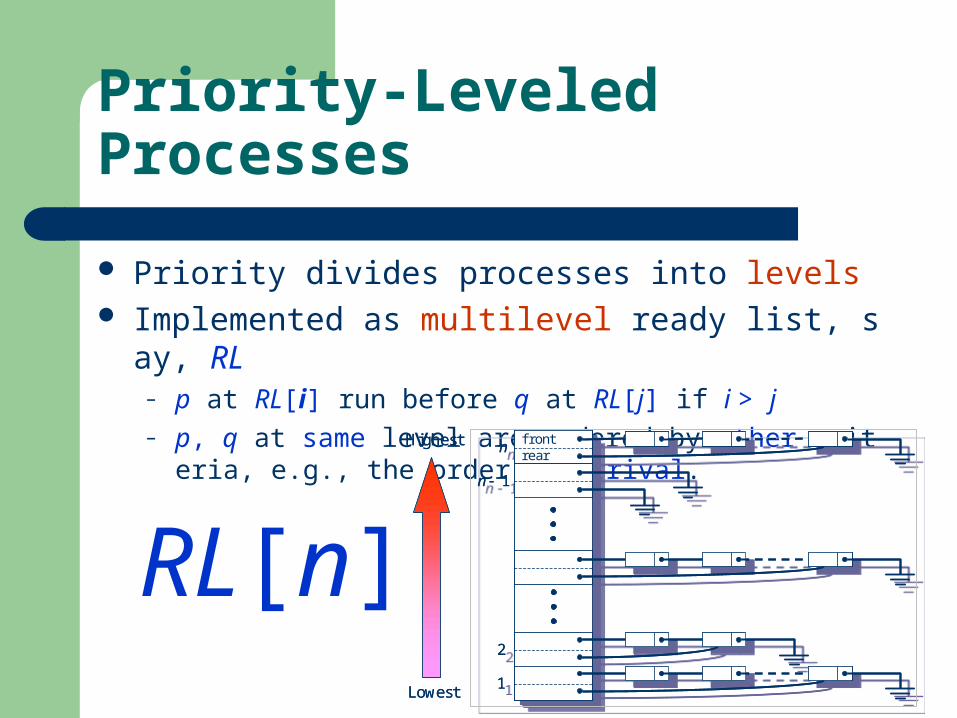
Priority divides processes into levels Implemented as multilevel ready list, say, RL
– p at RL[i] run before q at RL[j] if i > j– p, q at same level are ordered by other criteria, e.g., the o
rder of arrival.
RL[n]1
2
n 1
nf rontrear
1
2
n 1
nf rontrearf rontrearf rontrear
1
2
n 1
nf rontrear
1
2
n 1
nf rontrearf rontrearf rontrear
Lowest
Highest
Lowest
Highest
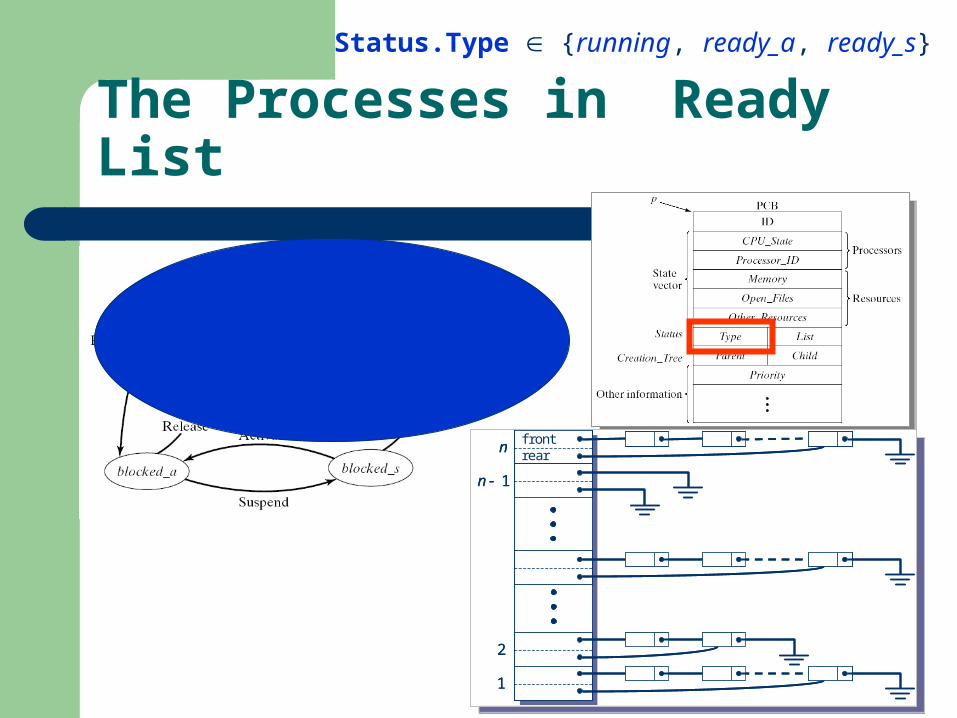
The Processes in Ready List
Status.Type {running, ready_a, ready_s}
1
2
n 1
nf rontrear
1
2
n 1
nf rontrearf rontrearf rontrear
1
2
n 1
nf rontrear
1
2
n 1
nf rontrearf rontrearf rontrear
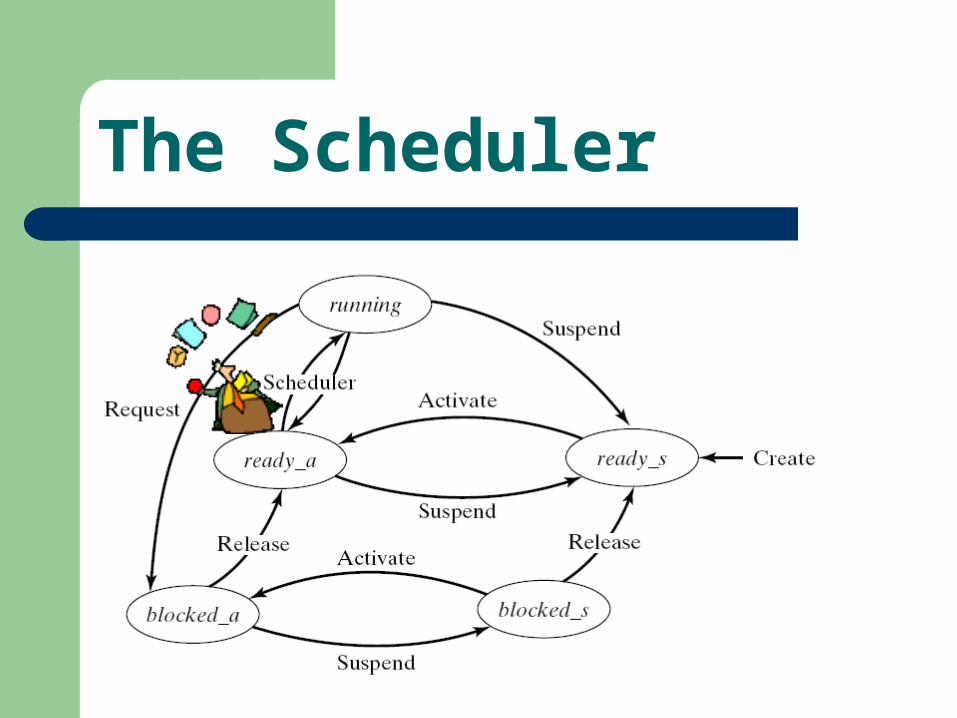
The Scheduler
The Scheduler
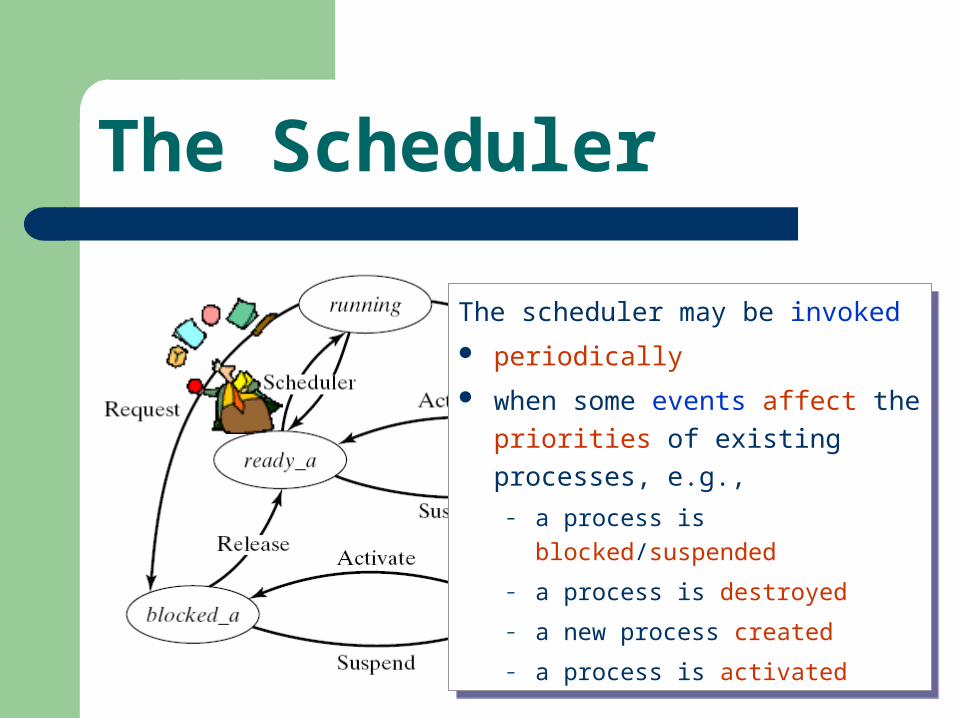
The scheduler may be invoked
periodically
when some events affect the priorities of existing processes, e.g.,
– a process is blocked/suspended
– a process is destroyed
– a new process created
– a process is activated
The scheduler may be invoked
periodically
when some events affect the priorities of existing processes, e.g.,
– a process is blocked/suspended
– a process is destroyed
– a new process created
– a process is activated
The Scheduler
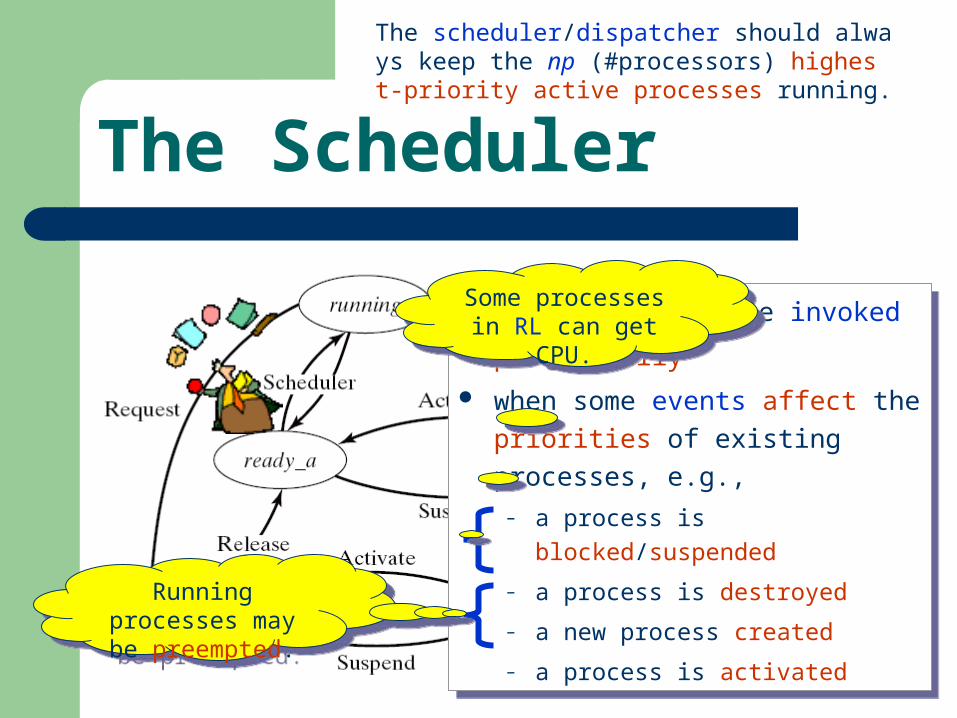
The scheduler may be invoked
periodically
when some events affect the priorities of existing processes, e.g.,
– a process is blocked/suspended
– a process is destroyed
– a new process created
– a process is activated
The scheduler may be invoked
periodically
when some events affect the priorities of existing processes, e.g.,
– a process is blocked/suspended
– a process is destroyed
– a new process created
– a process is activated
Some processes in RL can get
CPU.
Some processes in RL can get
CPU.
Running processes may be
preempted.
Running processes may be
preempted.
The scheduler/dispatcher should always keep the np (#processors) highest-priority active processes running.
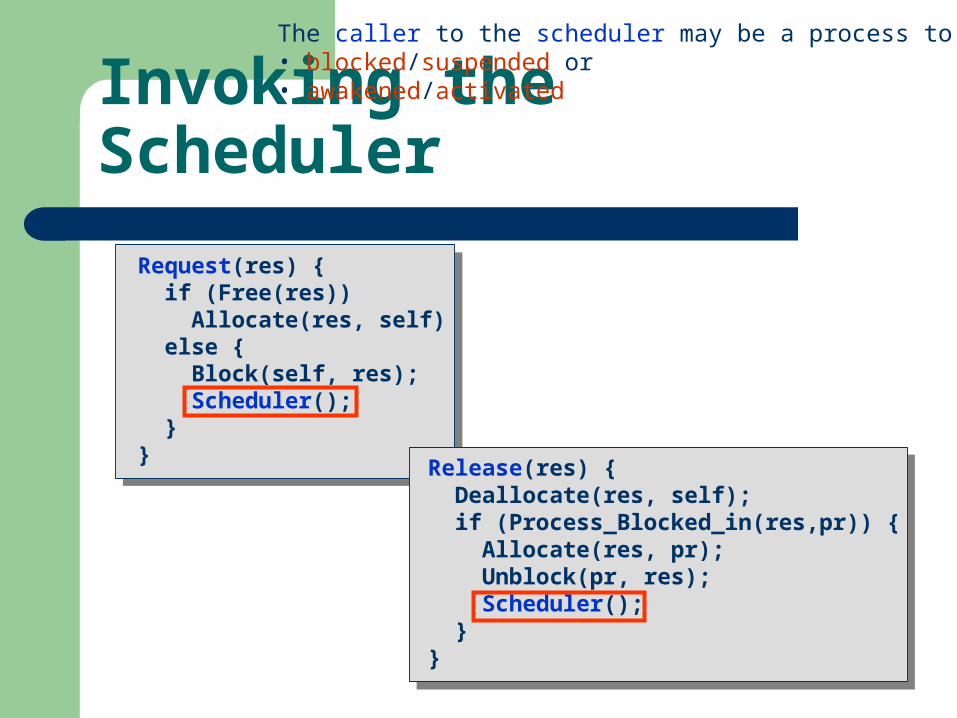
Invoking the Scheduler
Request(res) {if (Free(res))Allocate(res, self)
else {Block(self, res);Scheduler();
}}
Release(res) {Deallocate(res, self);if (Process_Blocked_in(res,pr)) {Allocate(res, pr);Unblock(pr, res);Scheduler();
}}
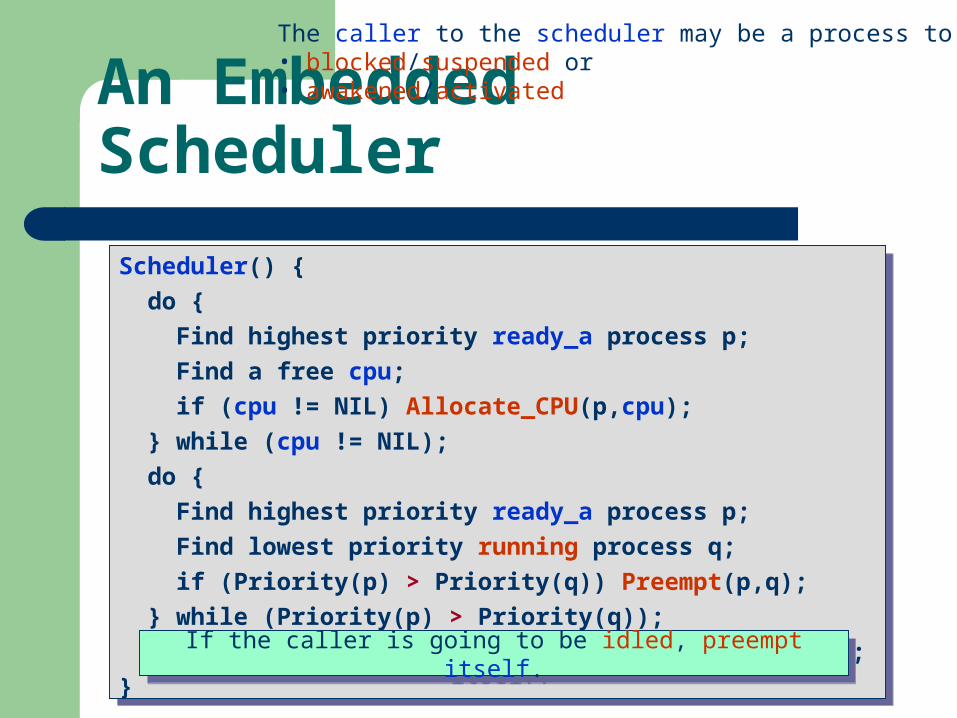
The caller to the scheduler may be a process to be• blocked/suspended or• awakened/activated
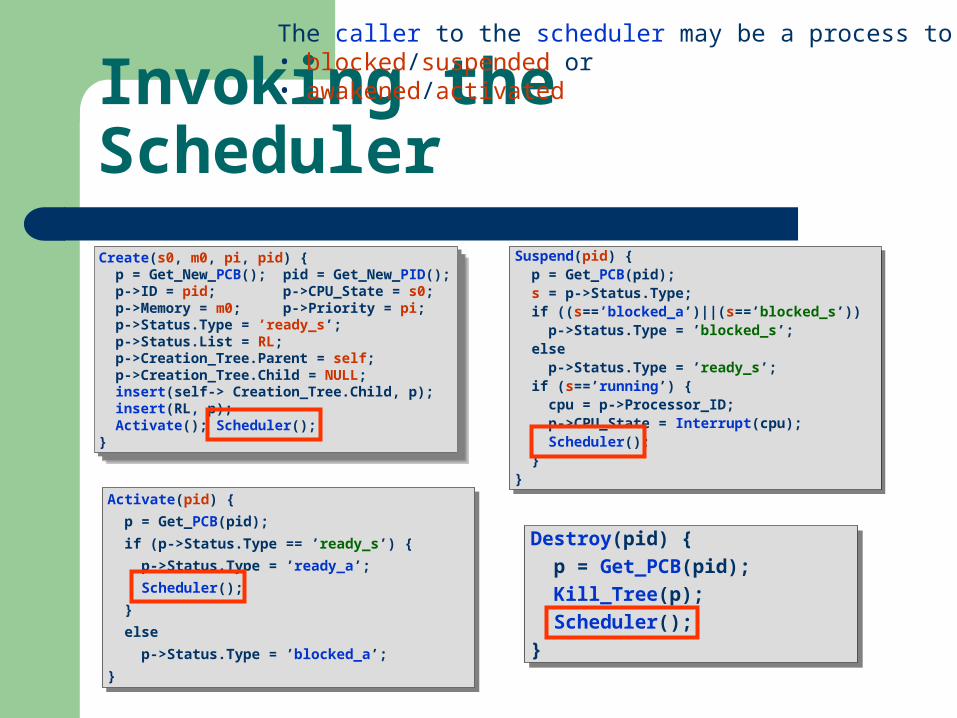
Invoking the Scheduler
Create(s0, m0, pi, pid) { p = Get_New_PCB(); pid = Get_New_PID(); p->ID = pid; p->CPU_State = s0; p->Memory = m0; p->Priority = pi; p->Status.Type = ’ready_s’; p->Status.List = RL; p->Creation_Tree.Parent = self; p->Creation_Tree.Child = NULL; insert(self-> Creation_Tree.Child, p); insert(RL, p);Activate(); Scheduler();
}
Create(s0, m0, pi, pid) { p = Get_New_PCB(); pid = Get_New_PID(); p->ID = pid; p->CPU_State = s0; p->Memory = m0; p->Priority = pi; p->Status.Type = ’ready_s’; p->Status.List = RL; p->Creation_Tree.Parent = self; p->Creation_Tree.Child = NULL; insert(self-> Creation_Tree.Child, p); insert(RL, p);Activate(); Scheduler();
}
Suspend(pid) { p = Get_PCB(pid); s = p->Status.Type; if ((s==’blocked_a’)||(s==’blocked_s’))p->Status.Type = ’blocked_s’;
elsep->Status.Type = ’ready_s’;
if (s==’running’) {cpu = p->Processor_ID; p->CPU_State = Interrupt(cpu);Scheduler();
} }
Suspend(pid) { p = Get_PCB(pid); s = p->Status.Type; if ((s==’blocked_a’)||(s==’blocked_s’))p->Status.Type = ’blocked_s’;
elsep->Status.Type = ’ready_s’;
if (s==’running’) {cpu = p->Processor_ID; p->CPU_State = Interrupt(cpu);Scheduler();
} }
Activate(pid) {
p = Get_PCB(pid);
if (p->Status.Type == ’ready_s’) {
p->Status.Type = ’ready_a’;
Scheduler();
}
else
p->Status.Type = ’blocked_a’;
}
Activate(pid) {
p = Get_PCB(pid);
if (p->Status.Type == ’ready_s’) {
p->Status.Type = ’ready_a’;
Scheduler();
}
else
p->Status.Type = ’blocked_a’;
}
Destroy(pid) {
p = Get_PCB(pid);
Kill_Tree(p);
Scheduler();
}
Destroy(pid) {
p = Get_PCB(pid);
Kill_Tree(p);
Scheduler();
}
The caller to the scheduler may be a process to be• blocked/suspended or• awakened/activated
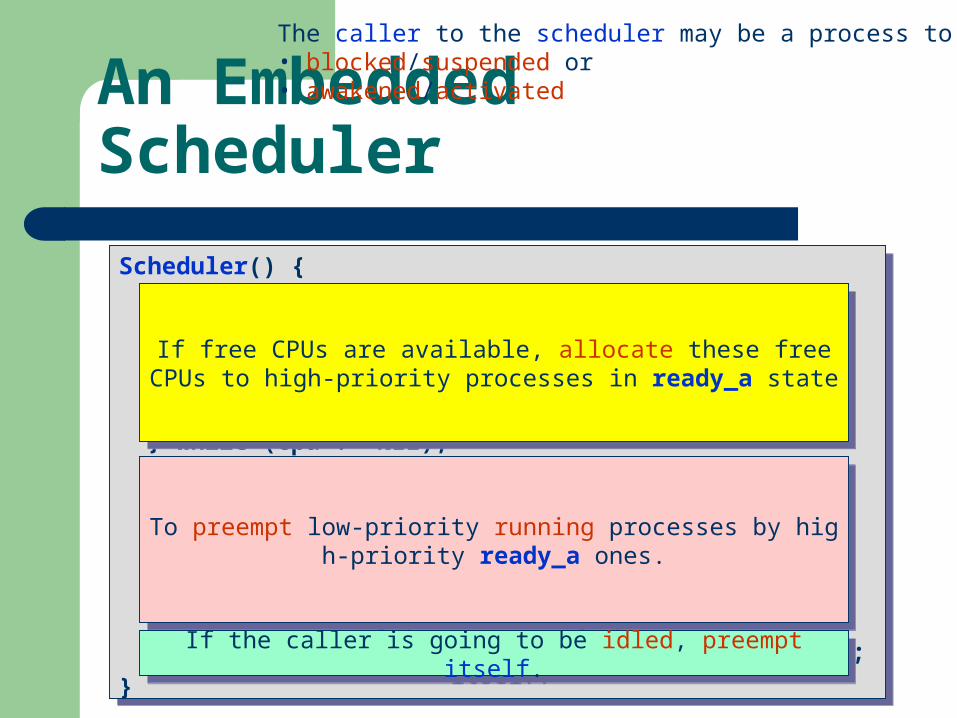
An Embedded Scheduler
Scheduler() {
do {
Find highest priority ready_a process p;
Find a free cpu;
if (cpu != NIL) Allocate_CPU(p,cpu);
} while (cpu != NIL);
do {
Find highest priority ready_a process p;
Find lowest priority running process q;
if (Priority(p) > Priority(q)) Preempt(p,q);
} while (Priority(p) > Priority(q));
if (self->Status.Type!=’running’) Preempt(p,self);
}
The caller to the scheduler may be a process to be• blocked/suspended or• awakened/activated
If free CPUs are available, allocate these free CPUs to high-priority processes in ready_a state
If free CPUs are available, allocate these free CPUs to high-priority processes in ready_a state
To preempt low-priority running processes by high-priority ready_a ones.
To preempt low-priority running processes by high-priority ready_a ones.
If the caller is going to be idled, preempt itself.If the caller is going to be idled, preempt itself.
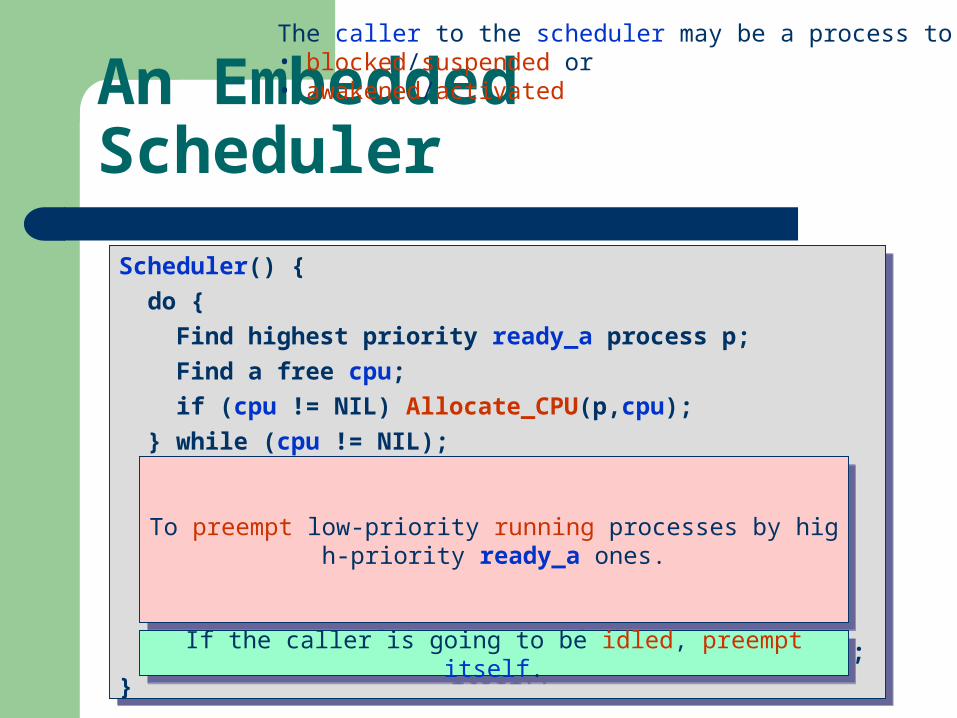
An Embedded Scheduler
Scheduler() {
do {
Find highest priority ready_a process p;
Find a free cpu;
if (cpu != NIL) Allocate_CPU(p,cpu);
} while (cpu != NIL);
do {
Find highest priority ready_a process p;
Find lowest priority running process q;
if (Priority(p) > Priority(q)) Preempt(p,q);
} while (Priority(p) > Priority(q));
if (self->Status.Type!=’running’) Preempt(p,self);
}
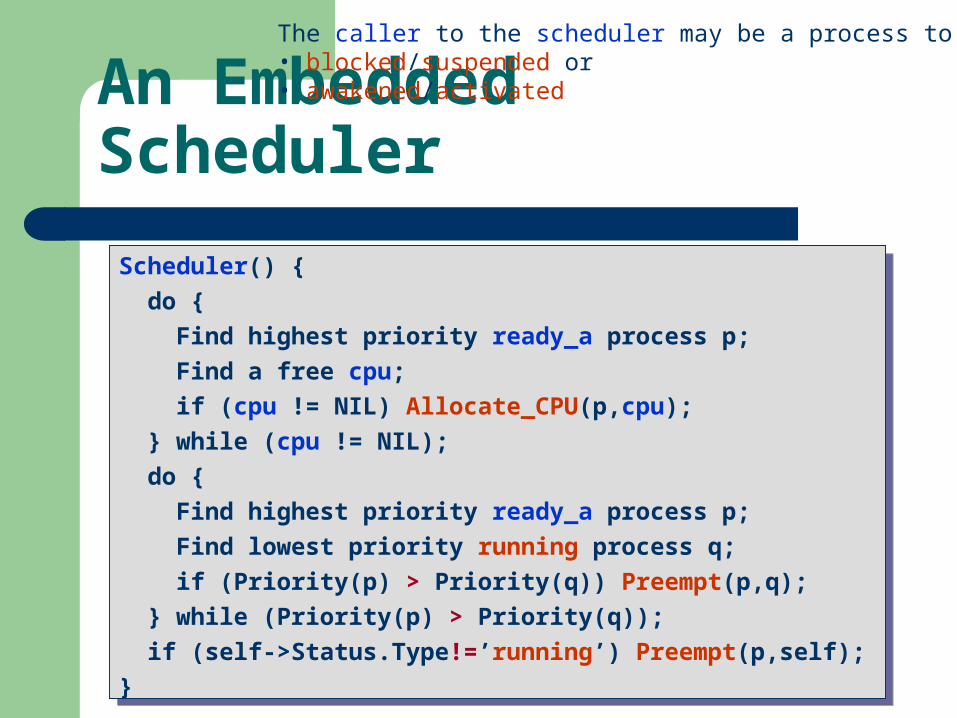
The caller to the scheduler may be a process to be• blocked/suspended or• awakened/activated
To preempt low-priority running processes by high-priority ready_a ones.
To preempt low-priority running processes by high-priority ready_a ones.
If the caller is going to be idled, preempt itself.If the caller is going to be idled, preempt itself.
An Embedded Scheduler
Scheduler() {
do {
Find highest priority ready_a process p;
Find a free cpu;
if (cpu != NIL) Allocate_CPU(p,cpu);
} while (cpu != NIL);
do {
Find highest priority ready_a process p;
Find lowest priority running process q;
if (Priority(p) > Priority(q)) Preempt(p,q);
} while (Priority(p) > Priority(q));
if (self->Status.Type!=’running’) Preempt(p,self);
}
The caller to the scheduler may be a process to be• blocked/suspended or• awakened/activated
If the caller is going to be idled, preempt itself.If the caller is going to be idled, preempt itself.
An Embedded Scheduler
Scheduler() {
do {
Find highest priority ready_a process p;
Find a free cpu;
if (cpu != NIL) Allocate_CPU(p,cpu);
} while (cpu != NIL);
do {
Find highest priority ready_a process p;
Find lowest priority running process q;
if (Priority(p) > Priority(q)) Preempt(p,q);
} while (Priority(p) > Priority(q));
if (self->Status.Type!=’running’) Preempt(p,self);
}
The caller to the scheduler may be a process to be• blocked/suspended or• awakened/activated
An Embedded Scheduler
Scheduler() {
do {
Find highest priority ready_a process p;
Find a free cpu;
if (cpu != NIL) Allocate_CPU(p,cpu);
} while (cpu != NIL);
do {
Find highest priority ready_a process p;
Find lowest priority running process q;
if (Priority(p) > Priority(q)) Preempt(p,q);
} while (Priority(p) > Priority(q));
if (self->Status.Type!=’running’) Preempt(p,self);
}
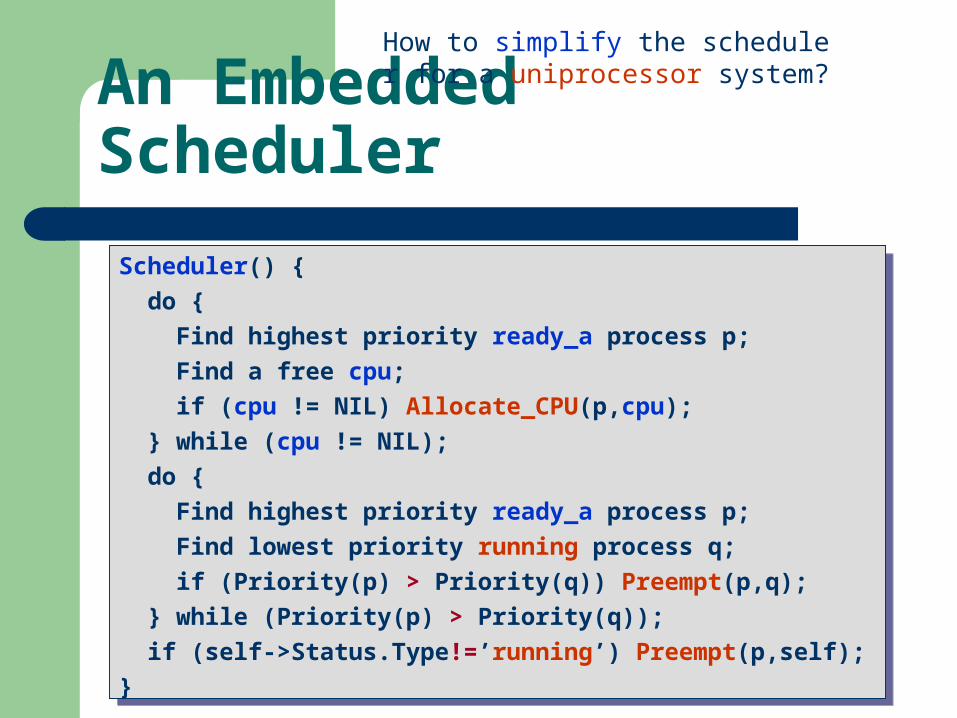
How to simplify the scheduler for a uniprocessor system?
Operating Systems PrinciplesProcess Management and Coordination
Lecture 5:Process and Thread Scheduling
Scheduling Methods
Scheduling Policy
Scheduling based on certain criteria.
For examples:– batch jobs vs. interactive users– System processes vs. user processes– I/O bound processes vs. CPU bound
processes
The General Framework
When to schedule?– Preemptive– Nonpreemptive
Who to schedule?– Priority evaluation– Arbitration to break ties
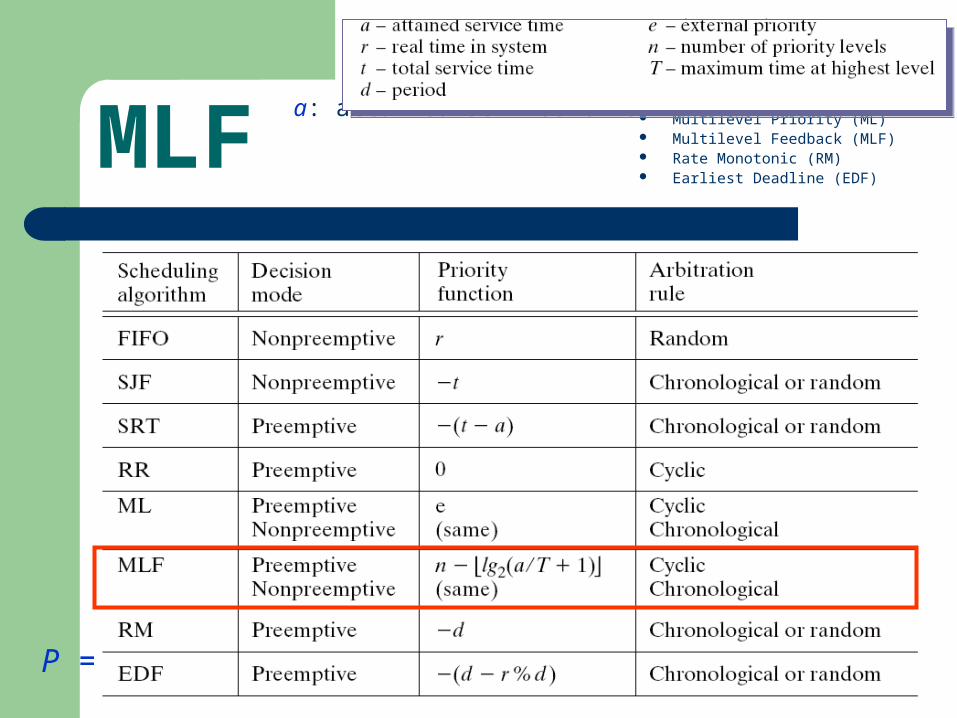
Decision Mode
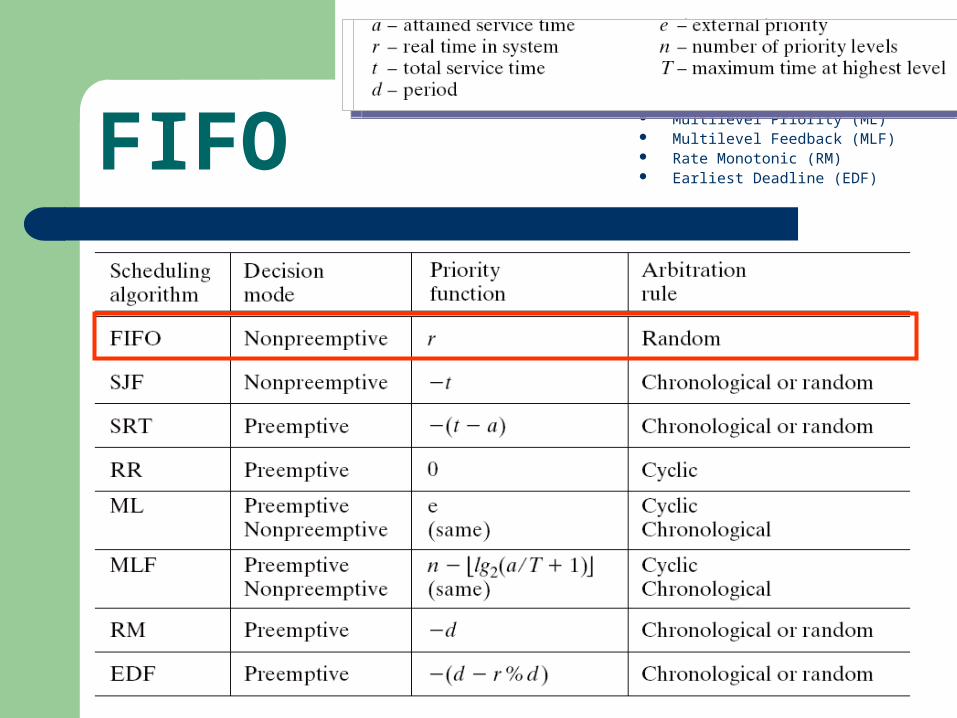
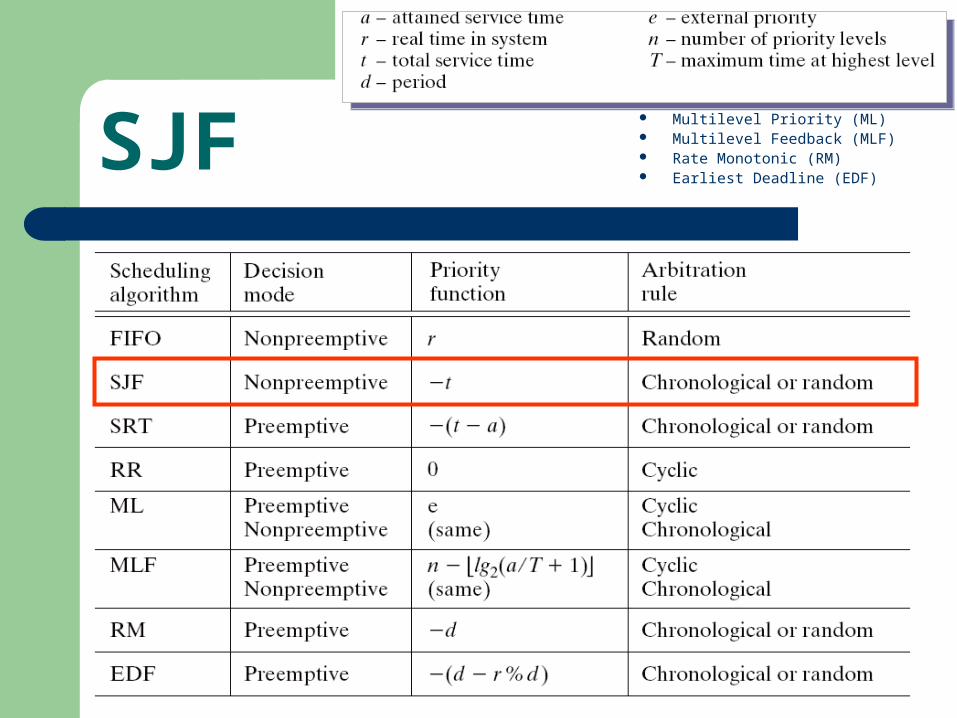
• Decision mode• Priority function• Arbitration Rule
A scheduling policy is determined by:
The Decision Modes
Preemptive: scheduler called– periodically (quantum-oriented) or – when system state changes
More costly
Nonpreemptive: scheduler called– when process terminates or blocks
Not adequate in real-time or time-shared systems
• Decision mode• Priority function• Arbitration Rule
A scheduling policy is determined by:
The Priority Function
• Decision mode• Priority function• Arbitration Rule
A scheduling policy is determined by:
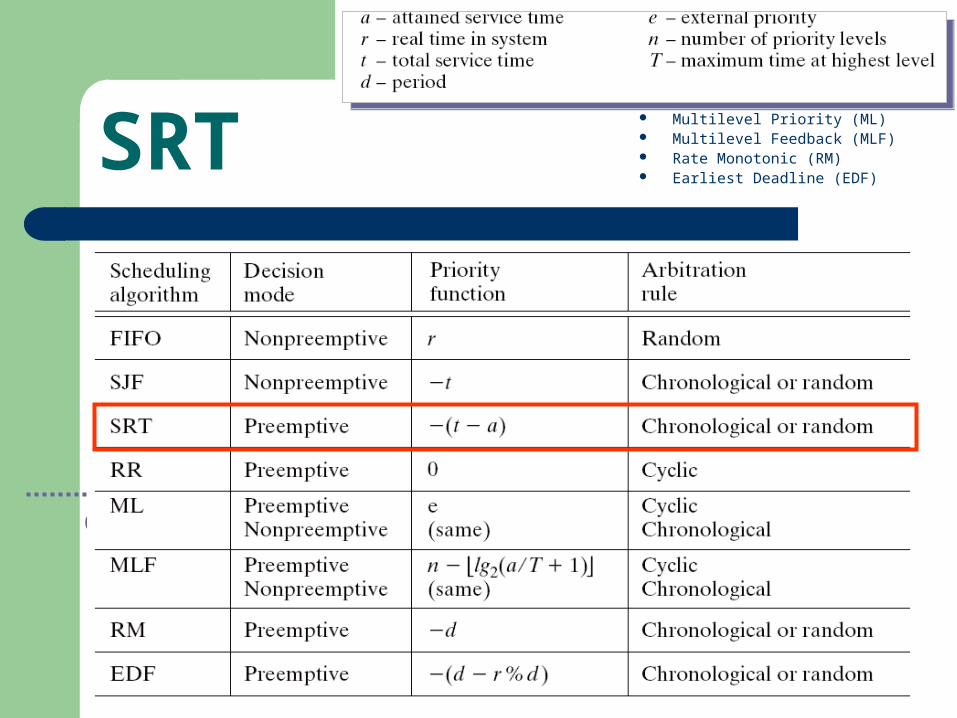
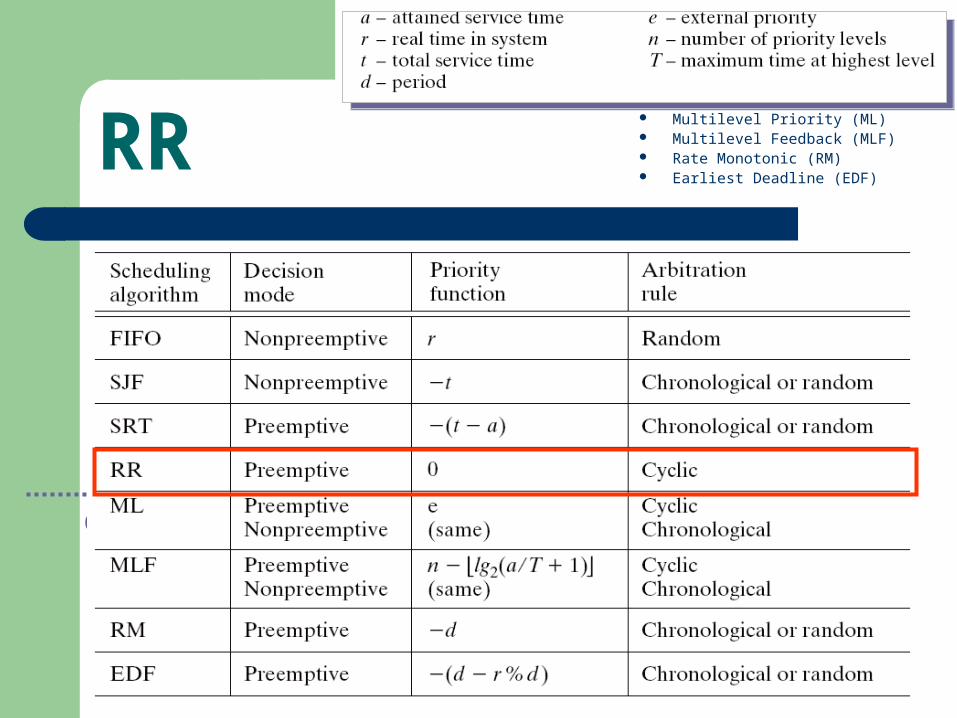
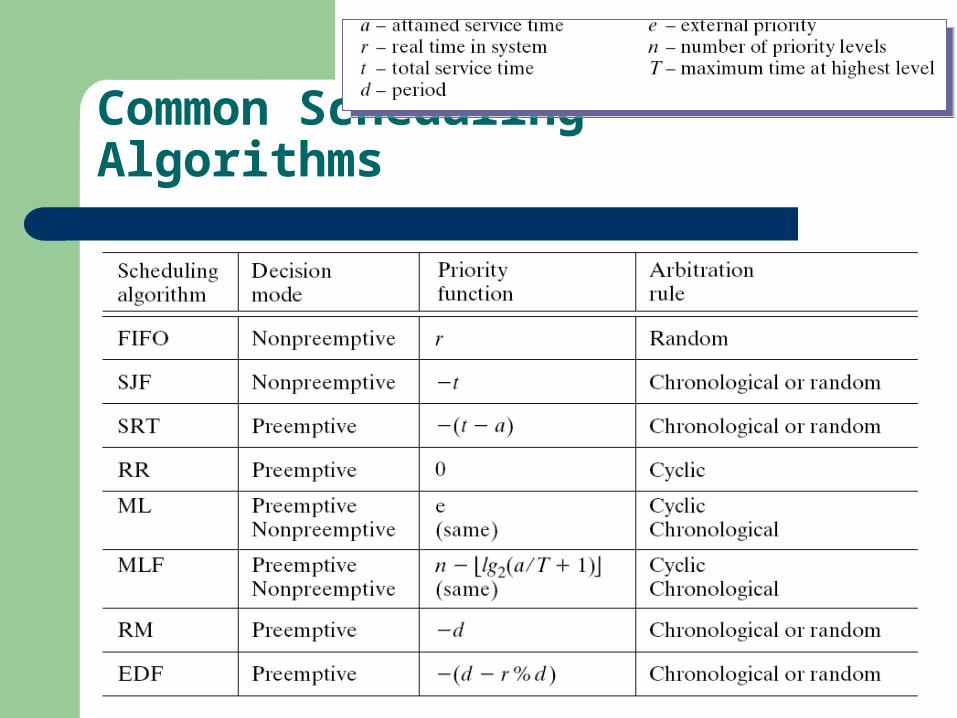
Possible parameters:– Attained service time (a)– Real time in system (r)– Total service time (t)– Period (d)– Deadline (explicit or implied by period)– External priority (e)– Memory requirements (mostly for batch)– System load (not process-specific)
The Arbitration Rules
• Decision mode• Priority function• Arbitration Rule
A scheduling policy is determined by:
Break ties among processes of the same priority– Random– Chronological (First In First Out = FIFO)– Cyclic (Round Robin = RR)
Common Scheduling Algorithms
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
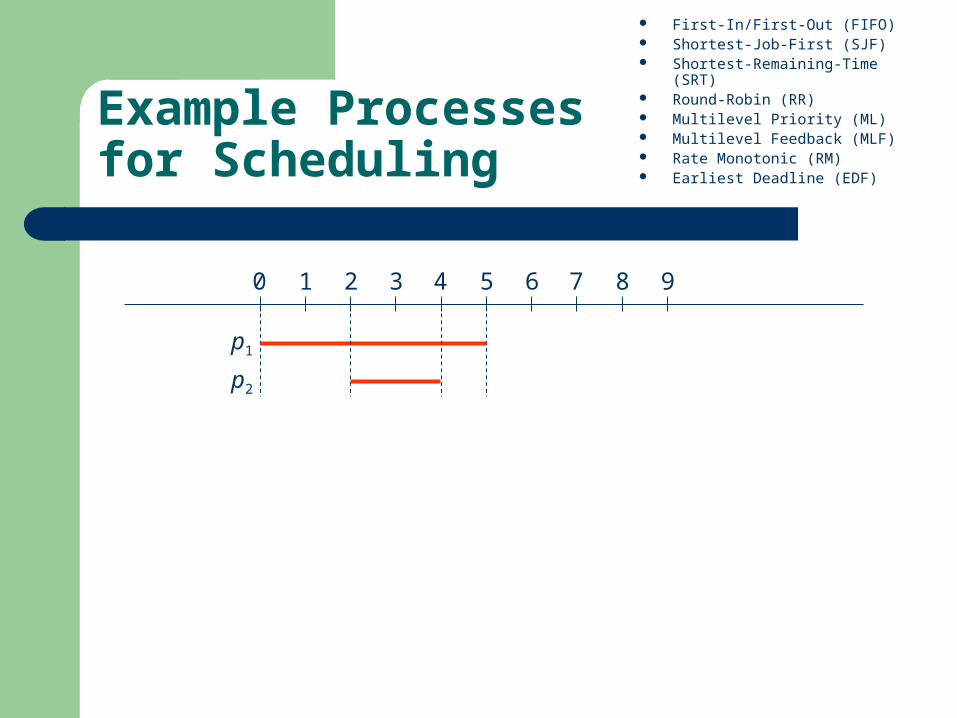
Example Processesfor Scheduling
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
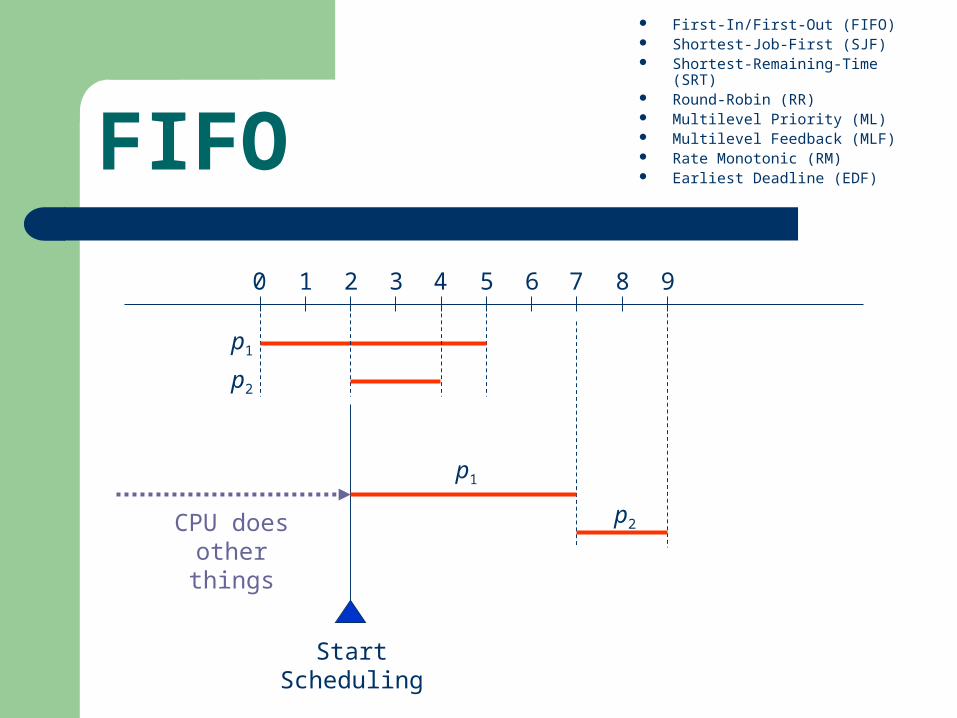
FIFO
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
CPU does other things
StartScheduling
p1
p2
FIFO
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
CPU does other things
StartScheduling
p1
p2
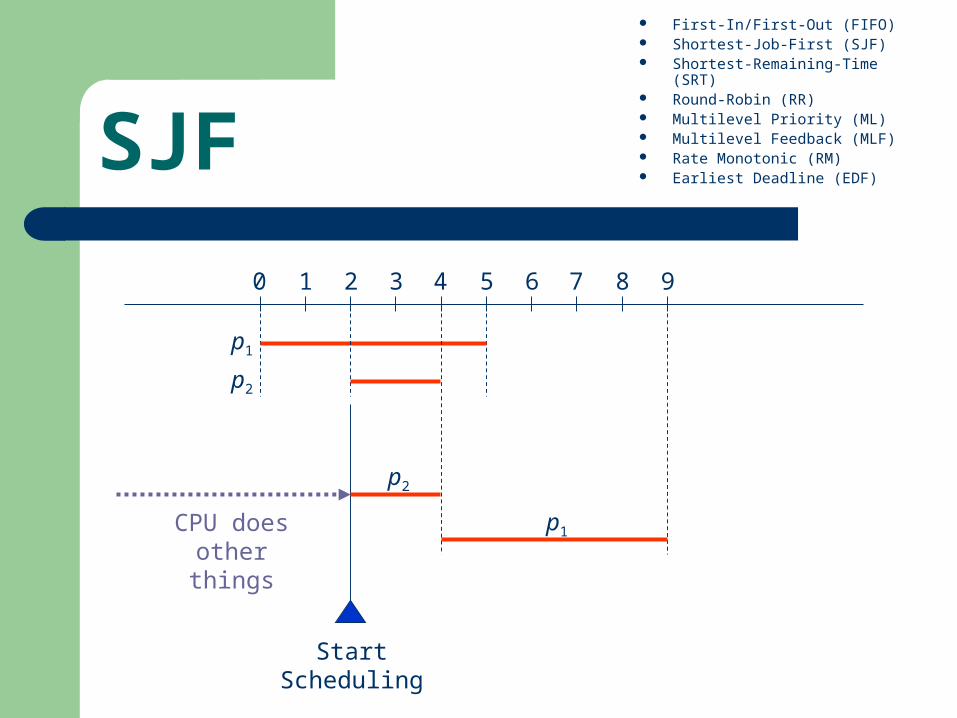
SJF
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
CPU does other things
StartScheduling
p1
p2
SJF
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
CPU does other things
StartScheduling
p1
p2
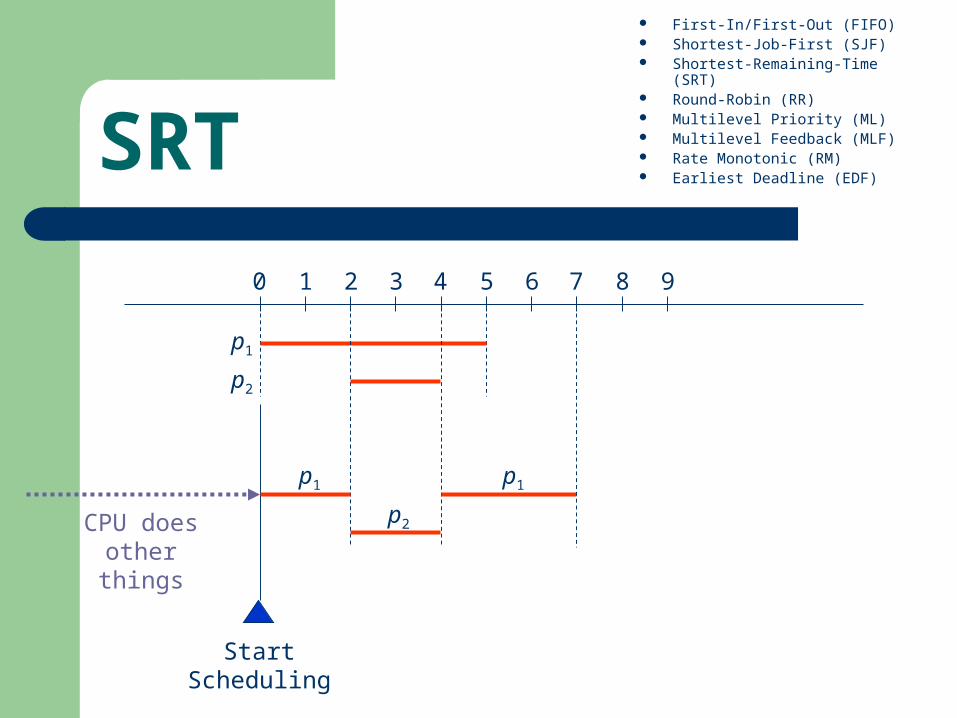
SRT
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
CPU does other things
StartScheduling
p1
p2
p1
SRT
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
CPU does other things
StartScheduling
p1
p2
p1
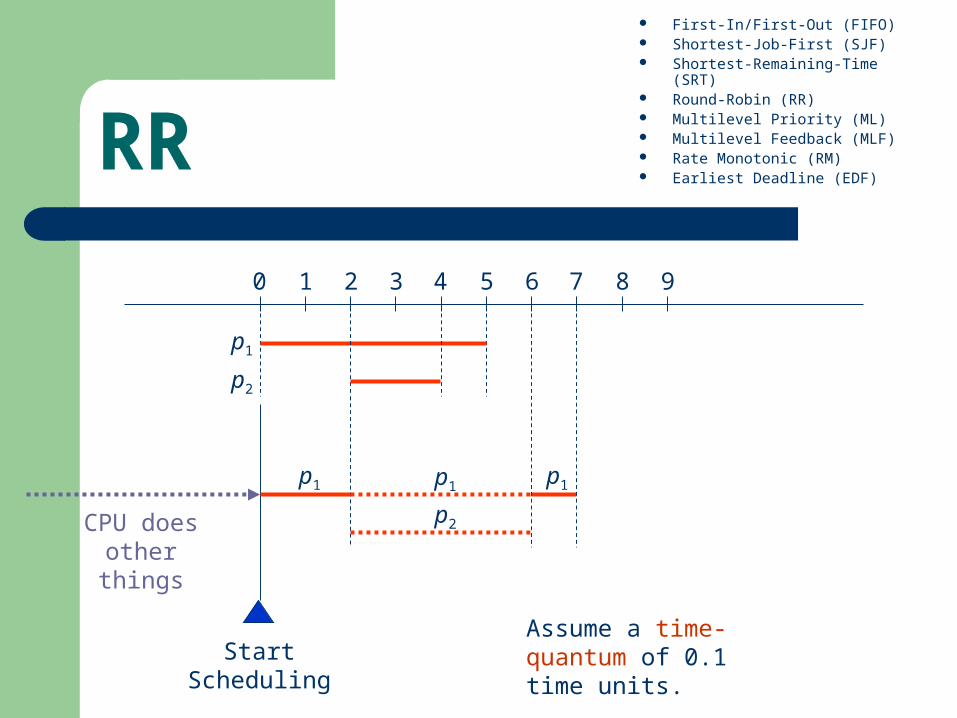
RR
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
CPU does other things
StartScheduling
p1 p1
Assume a time-quantum of 0.1 time units.
p2
p1
RR
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
CPU does other things
StartScheduling
p1 p1
Assume a time-quantum of 0.1 time units.
p2
p1
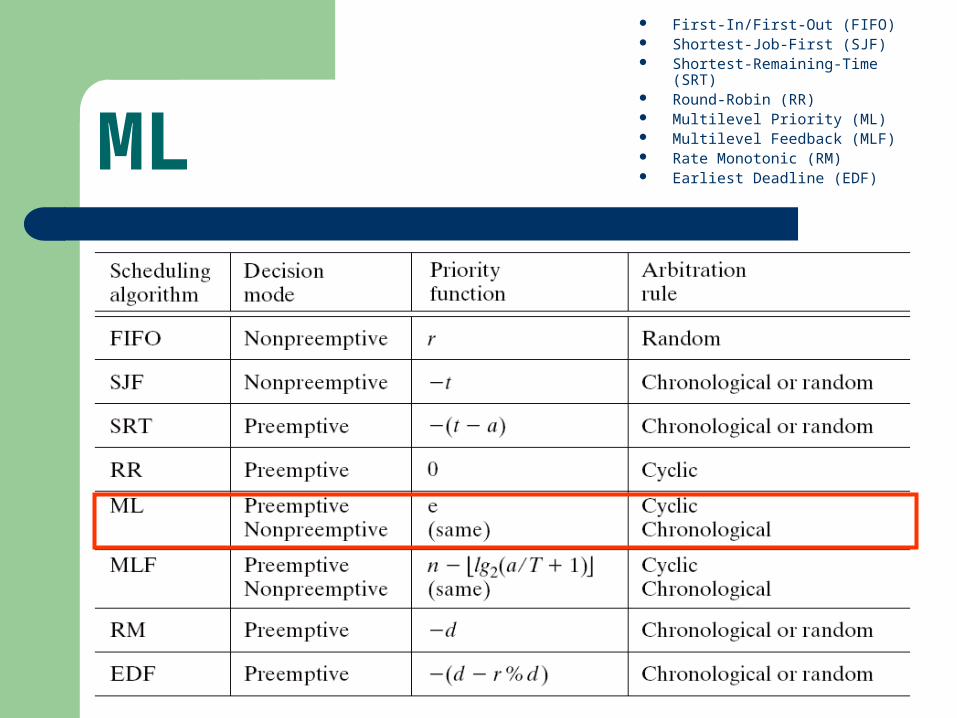
ML
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
1
2
n 1
n frontrear
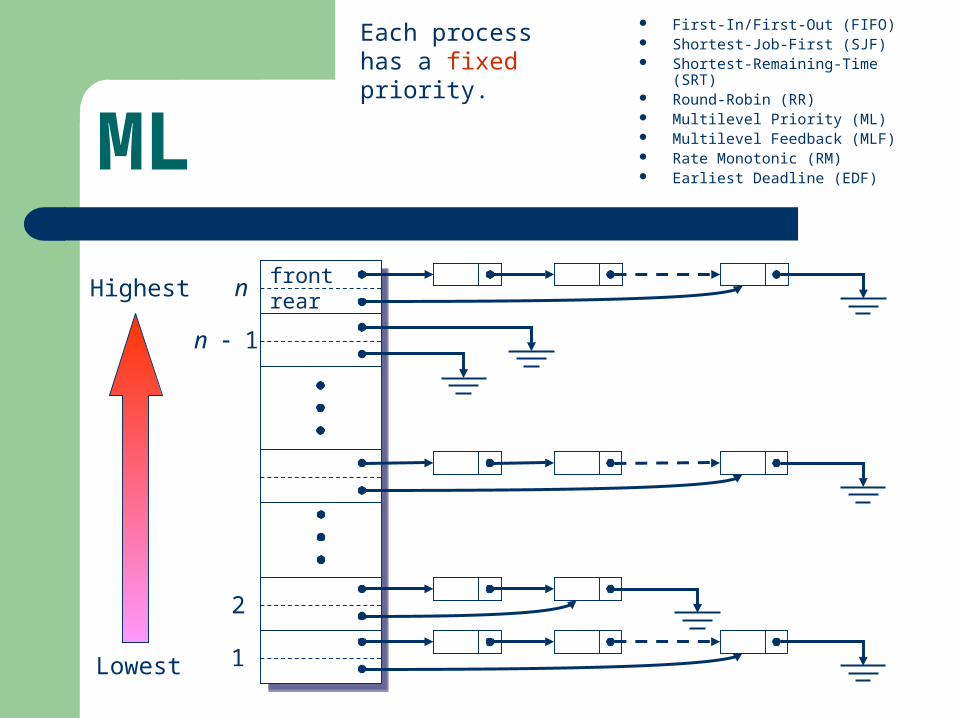
ML
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
Lowest
Highest
Each process has a fixed priority.
1
2
n 1
n frontrear
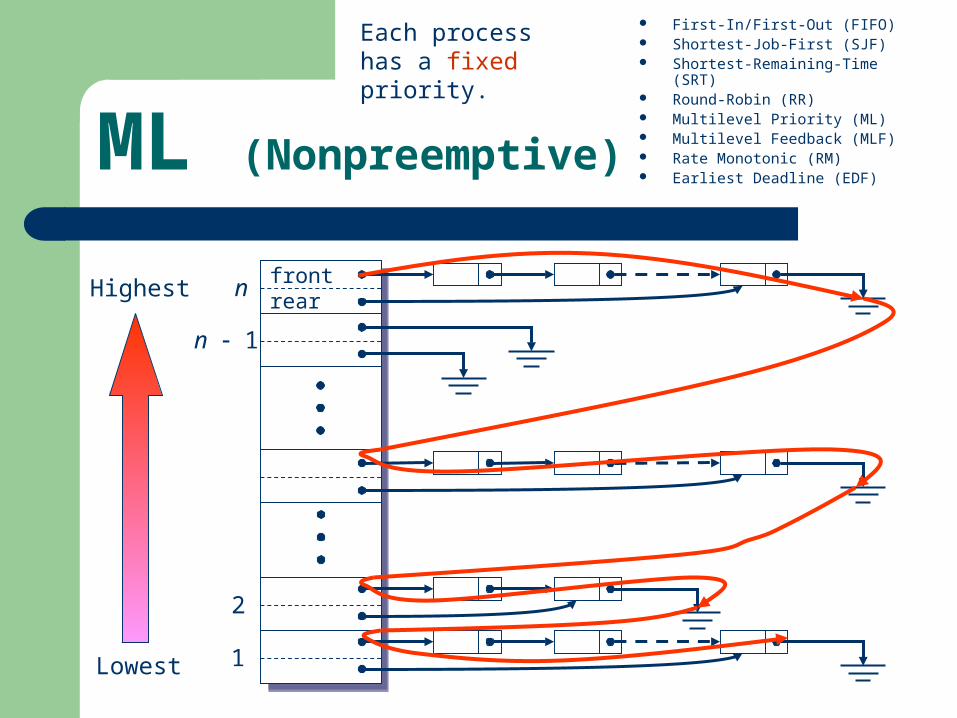
ML (Nonpreemptive)
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
Lowest
Highest
Each process has a fixed priority.
1
2
n 1
n frontrear
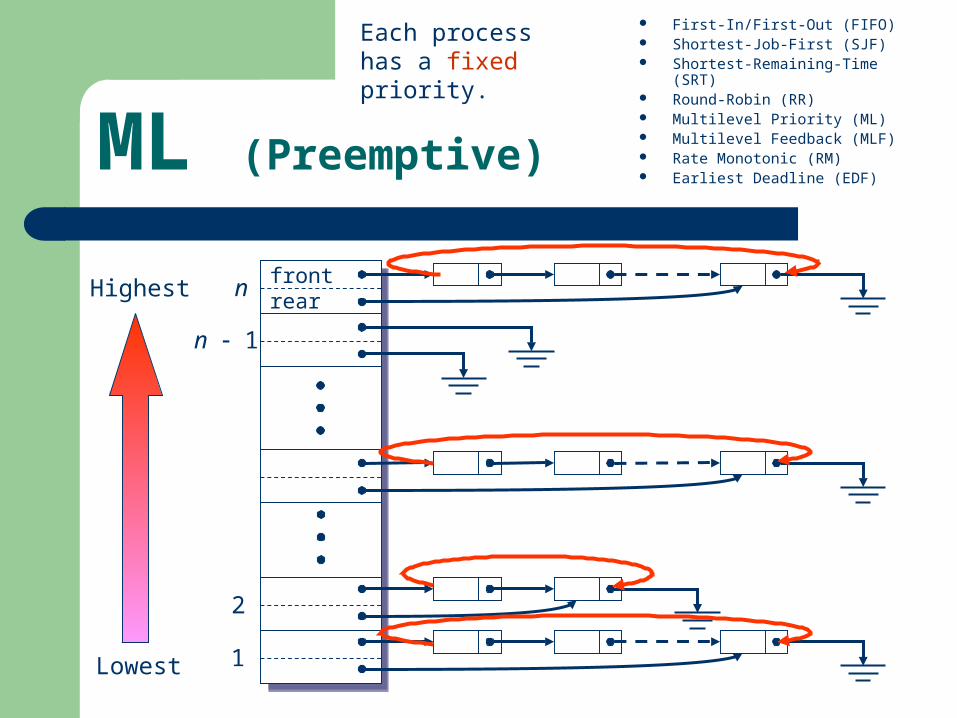
ML (Preemptive)
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
Lowest
Highest
Each process has a fixed priority.
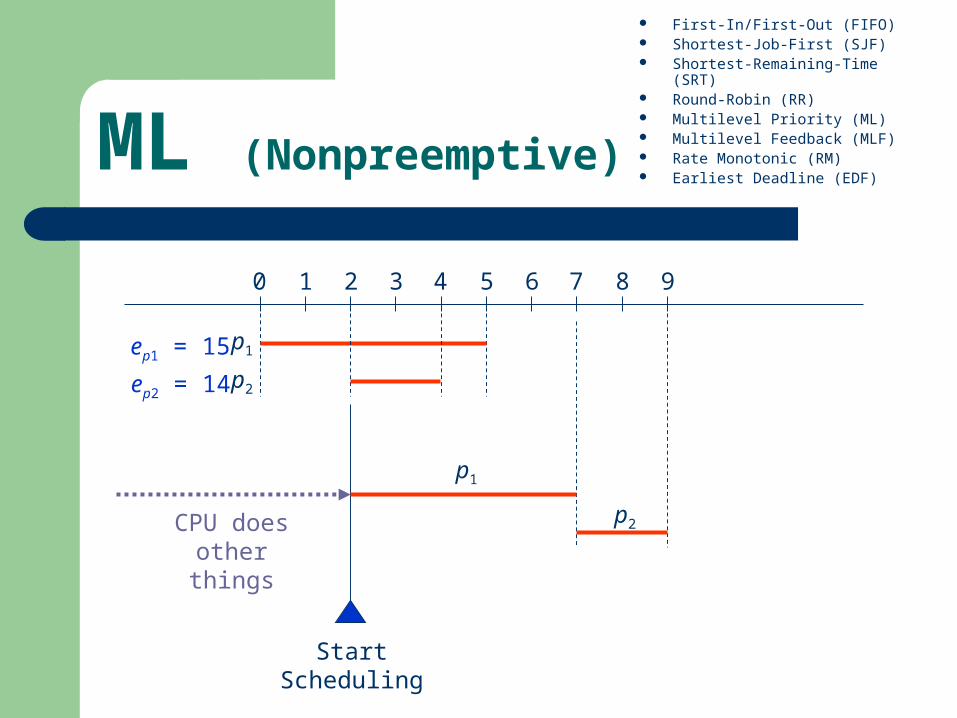
ML (Nonpreemptive)
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
0 1 2 3 4 5 6 7 8 9
p1
p2
ep1 = 15
ep2 = 14
CPU does other things
StartScheduling
p1
p2
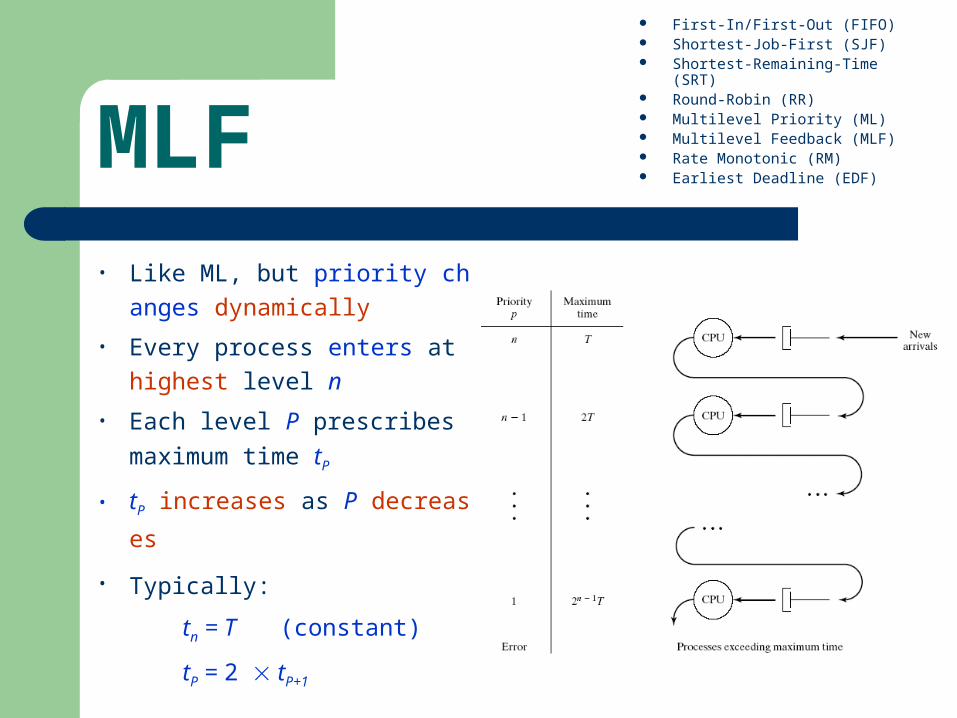
MLF• Like ML, but priority chang
es dynamically• Every process enters at hig
hest level n• Each level P prescribes ma
ximum time tP
• tP increases as P decreases
• Typically: tn = T (constant)
tP = 2 tP+1
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
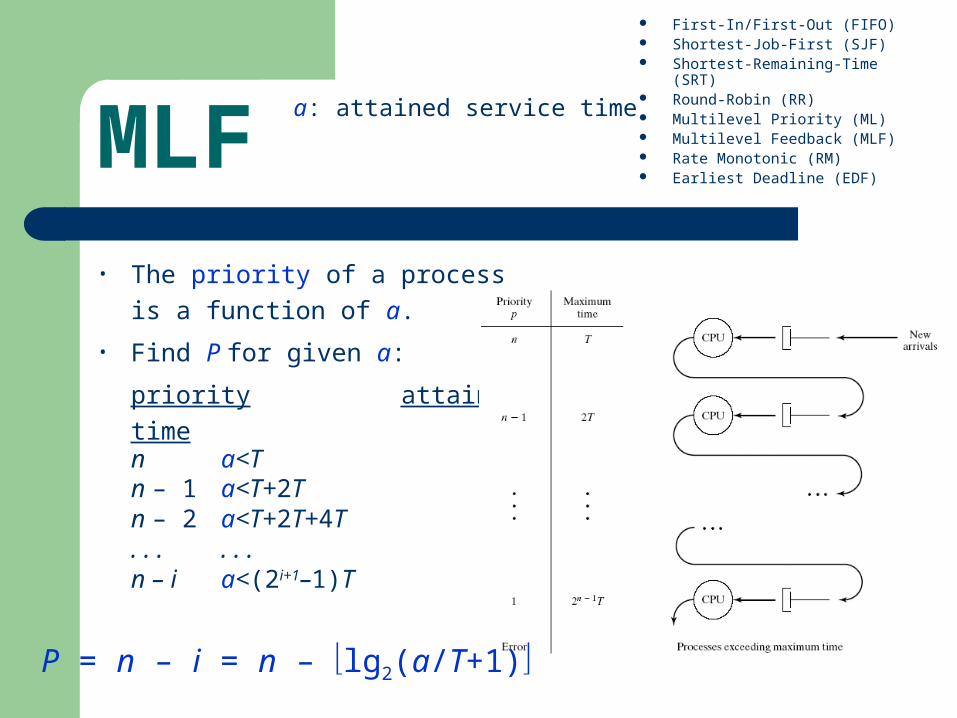
MLF• The priority of a process is a
function of a.
• Find P for given a:
priority attained timen a<Tn – 1 a<T+2Tn – 2 a<T+2T+4T. . . . . .n – i a<(2i+1–1)T
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
a: attained service time
P = n – i = n – lg2(a/T+1)
MLF• The priority of a process is a
function of a.
• Find P for given a:
priority attained timen a<Tn – 1 a<T+2Tn – 2 a<T+2T+4T. . . . . .n – i a<(2i+1–1)T
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
a: attained service time
P = n – i = n – lg2(a/T+1)
RM & EDF
First-In/First-Out (FIFO) Shortest-Job-First (SJF) Shortest-Remaining-Time (SRT) Round-Robin (RR) Multilevel Priority (ML) Multilevel Feedback (MLF) Rate Monotonic (RM) Earliest Deadline (EDF)
RM– Intended for periodic (real-time) processes– Preemptive – Highest priority: shortest period: P = –d
EDF– Intended for periodic (real-time) processes– Preemptive – Highest priority: shortest time to next deadline
r d number of completed periods
r % d time in current period
d – r % d time remaining in current period
P = –(d – r % d)
Common Scheduling Algorithms
Comparison of Methods
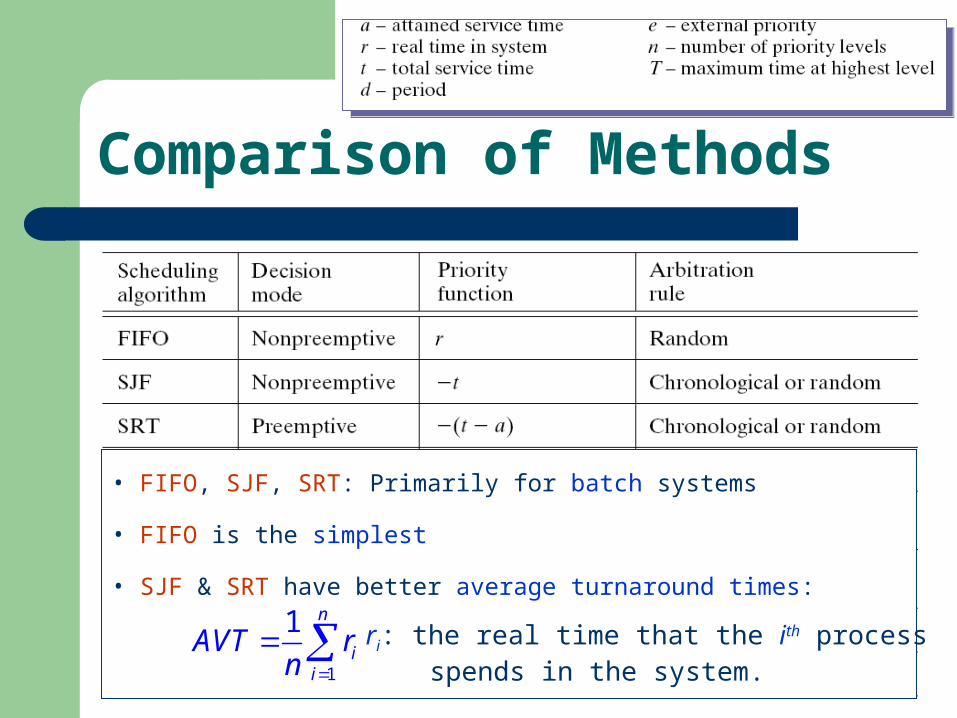
• FIFO, SJF, SRT: Primarily for batch systems
• FIFO is the simplest
• SJF & SRT have better average turnaround times:
1
1 n
ii
AVT rn
ri: the real time that the ith process spends in the system.
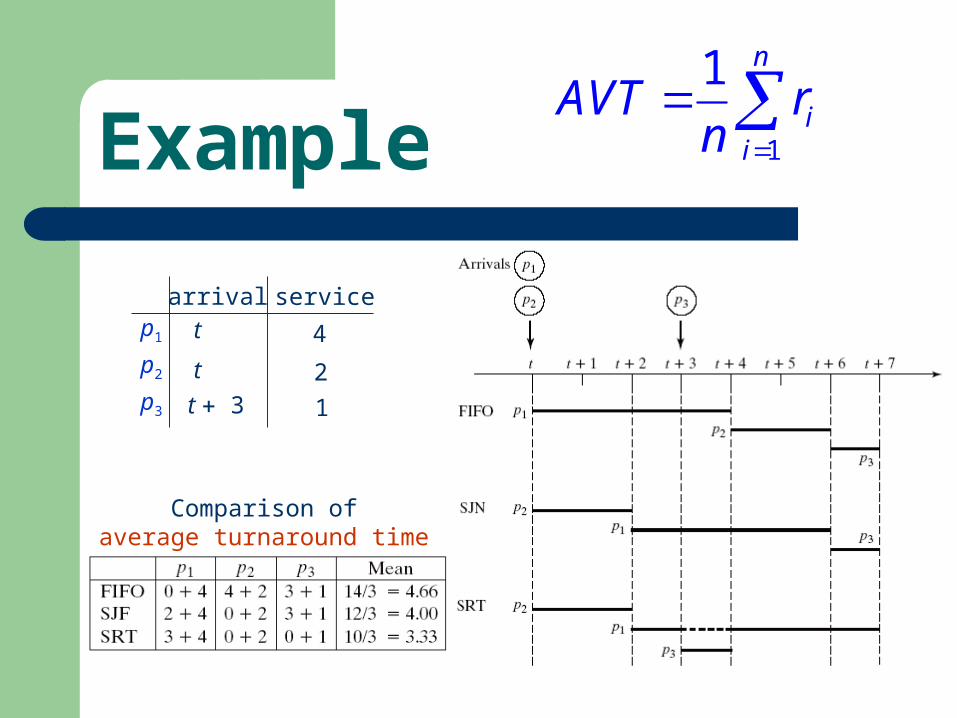
Example 1
1 n
ii
AVT rn
arrival servicep1
p2
p3
t
t
t 3
4
2
1
Comparison ofaverage turnaround time
Comparison of Methods
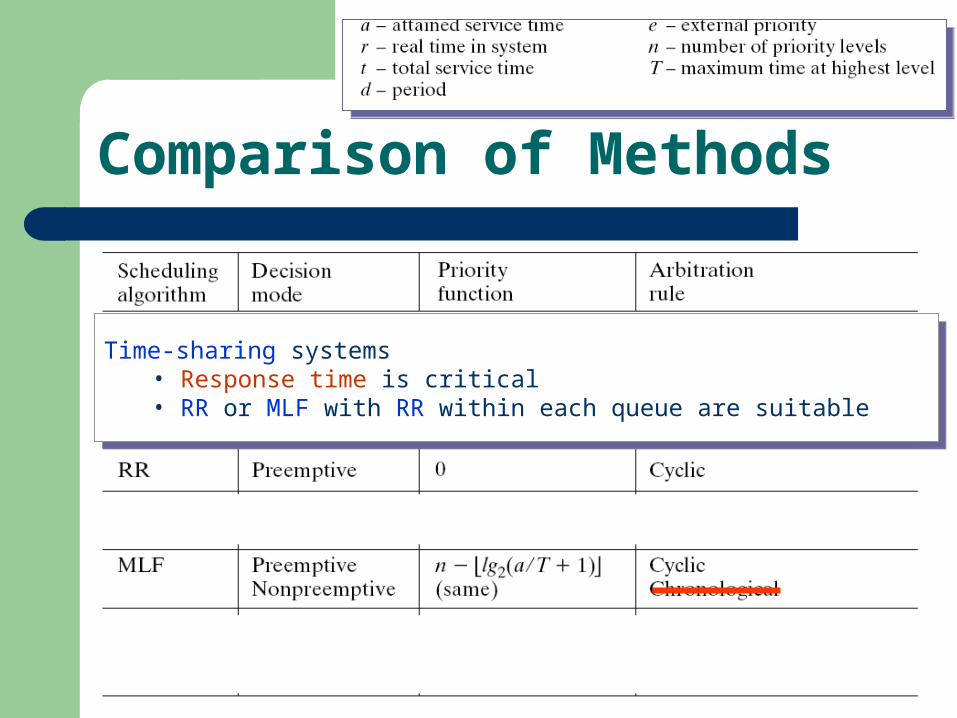
Time-sharing systems• Response time is critical• RR or MLF with RR within each queue are suitable
Time-sharing systems• Response time is critical• RR or MLF with RR within each queue are suitable
Comparison of Methods
Time-sharing systems– Response time is critical– RR or MLF with RR within each queue are suitable
Choice of quantum determines overhead– When q , RR approaches FIFO– When q 0, context switch overhead 100%– When q >> context switch overhead,
n processes run concurrently at 1/n CPU speed
Interactive Systems
1
2
n 1
nf rontrear
1
2
n 1
nf rontrearf rontrearf rontrear
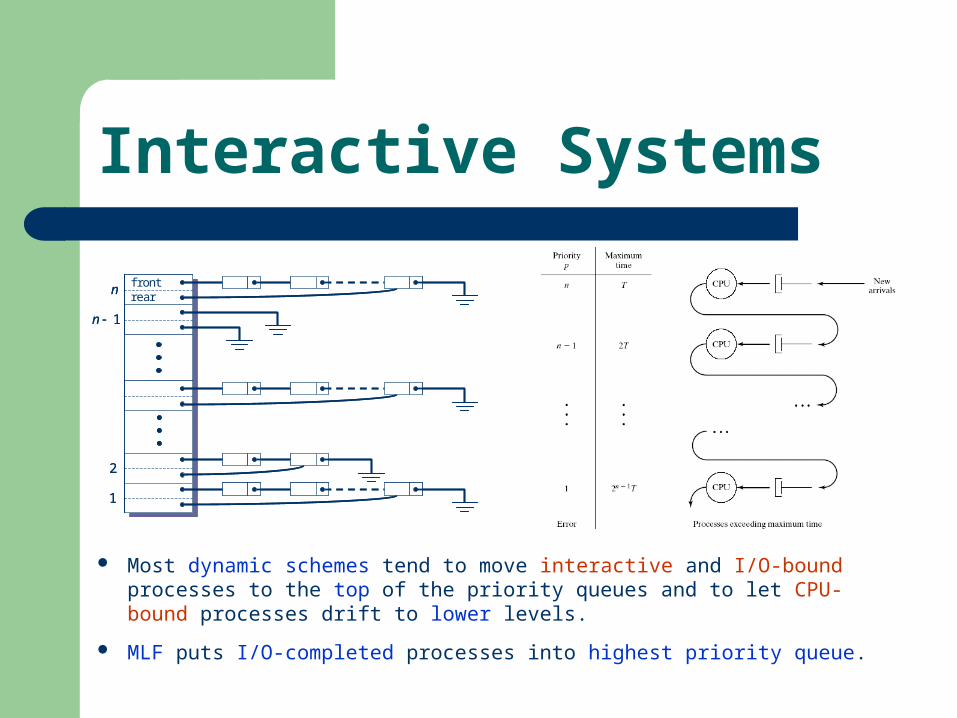
Most dynamic schemes tend to move interactive and I/O-bound processes to the top of the priority queues and to let CPU-bound processes drift to lower levels.
MLF puts I/O-completed processes into highest priority queue.
Comparison of Methods
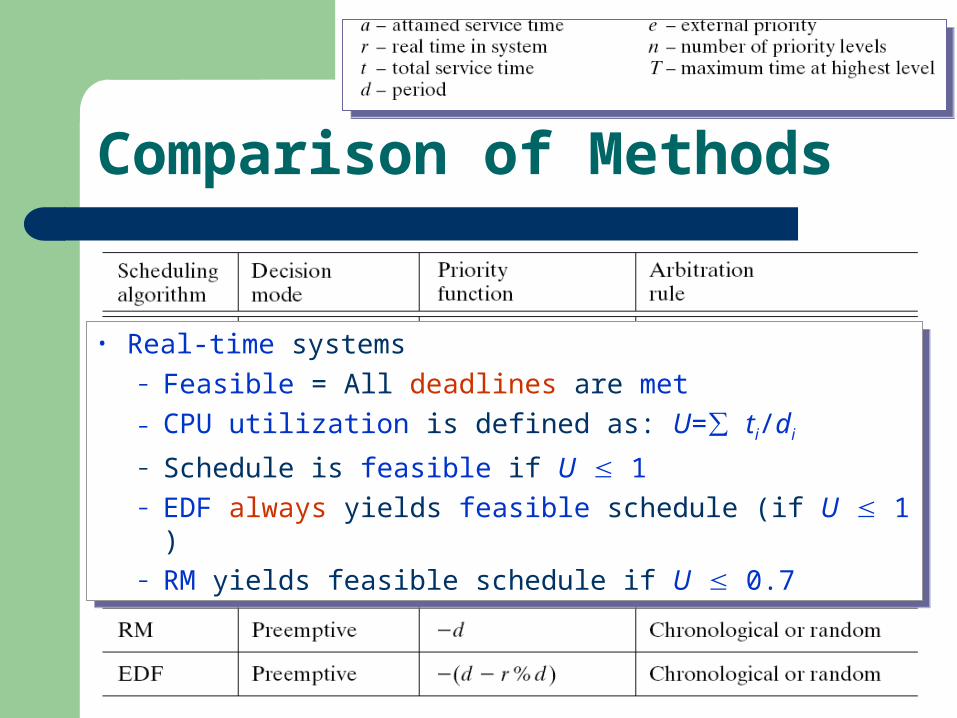
• Real-time systems– Feasible = All deadlines are met– CPU utilization is defined as: U=∑ ti/di
– Schedule is feasible if U 1– EDF always yields feasible schedule (if U 1)– RM yields feasible schedule if U 0.7
• Real-time systems– Feasible = All deadlines are met– CPU utilization is defined as: U=∑ ti/di
– Schedule is feasible if U 1– EDF always yields feasible schedule (if U 1)– RM yields feasible schedule if U 0.7
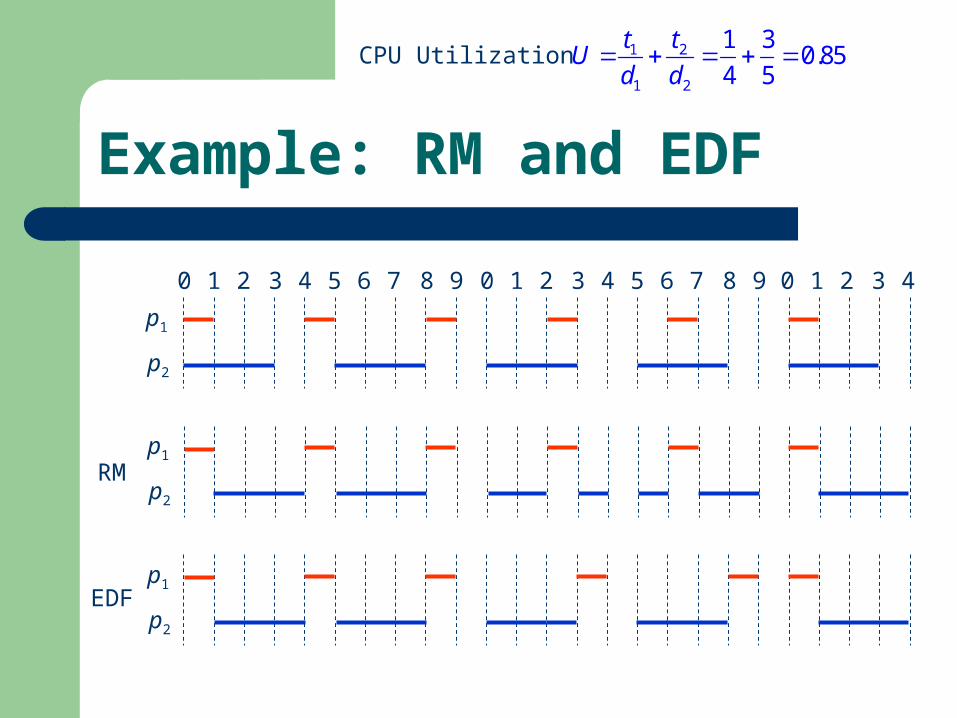
Example: RM and EDF
0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4
1 2
1 2
1 30.85
4 5
t tU
d d
p1
p2
CPU Utilization
p1
p2
RM
p1
p2
EDF
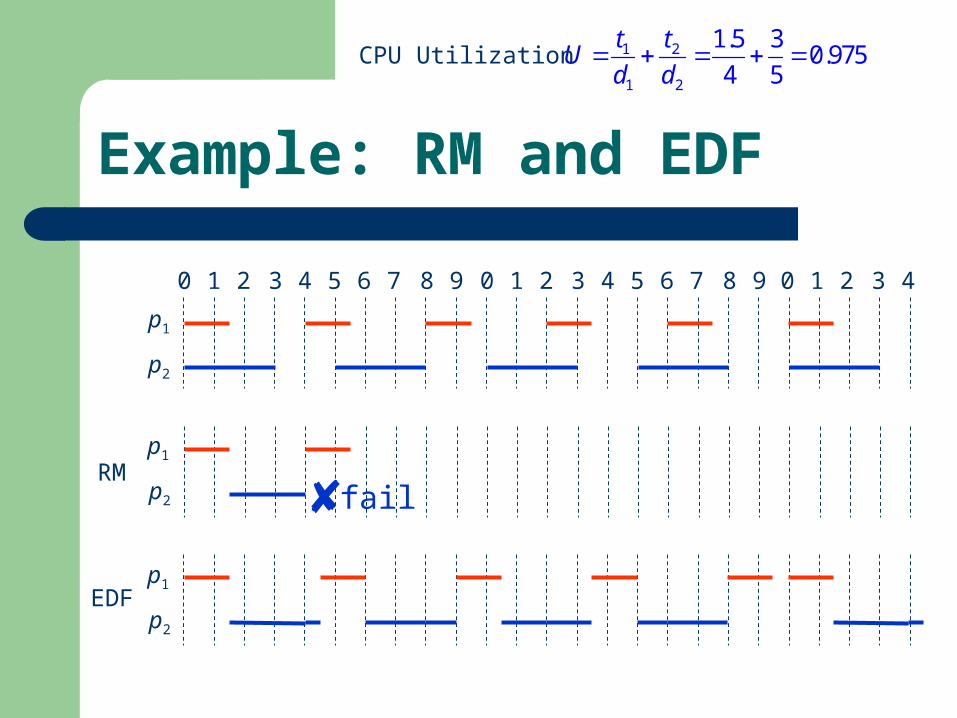
Example: RM and EDF
0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4
1 2
1 2
1.5 30.975
4 5
t tU
d d
p2
CPU Utilization
p1
p2
RM
p1
p2
EDF
p1
fail
Operating Systems PrinciplesProcess Management and Coordination
Lecture 5:Process and Thread Scheduling
Priority Inversion
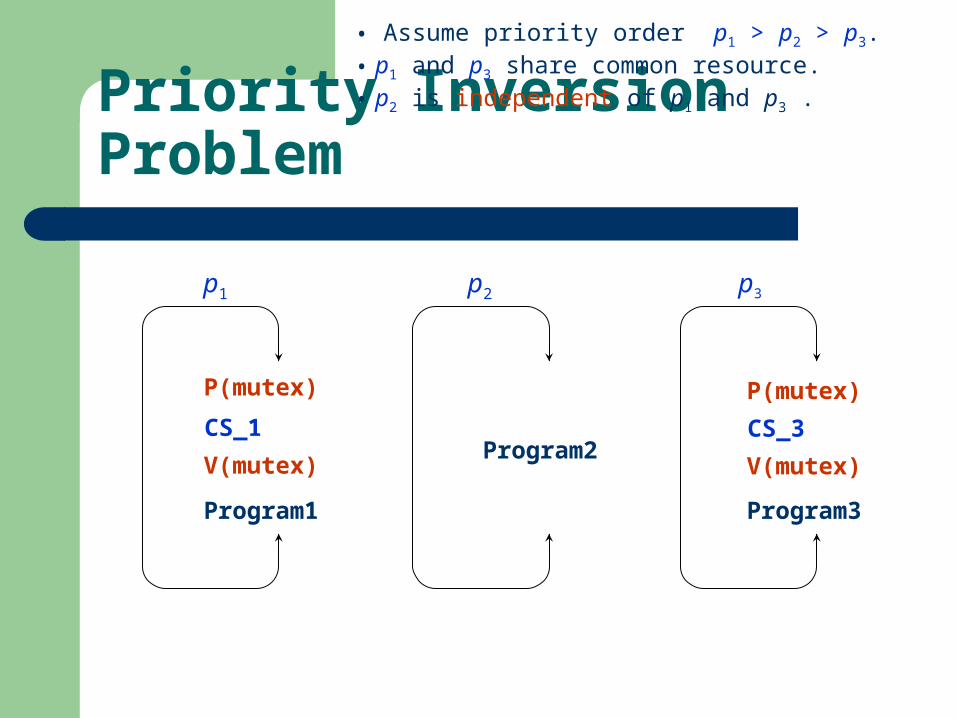
Priority Inversion Problem
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
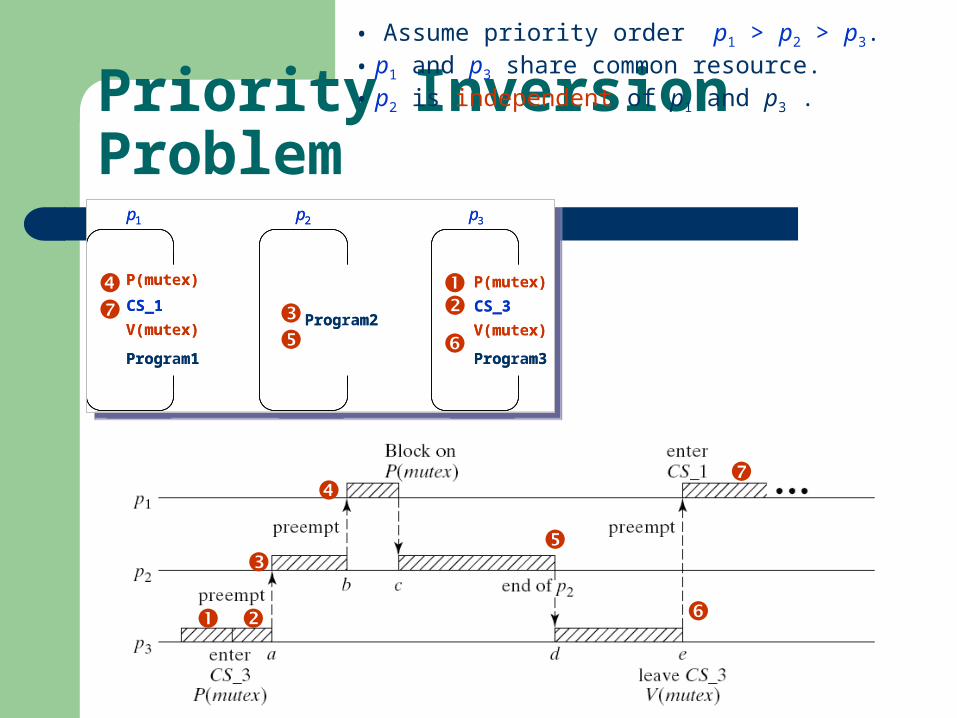
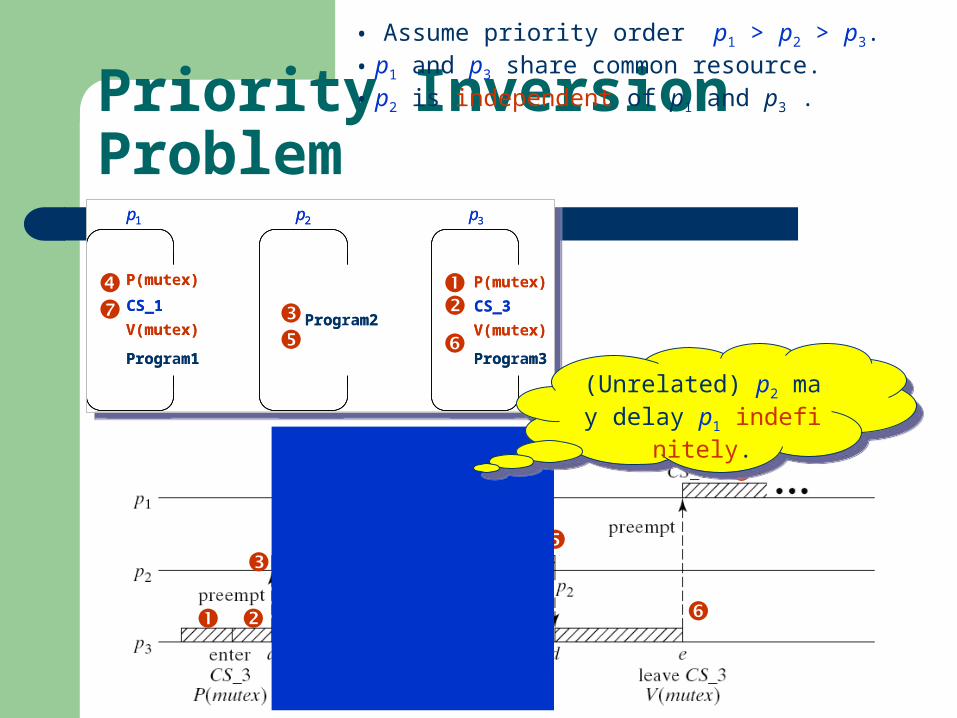
• Assume priority order p1 > p2 > p3.• p1 and p3 share common resource.• p2 is independent of p1 and p3 .
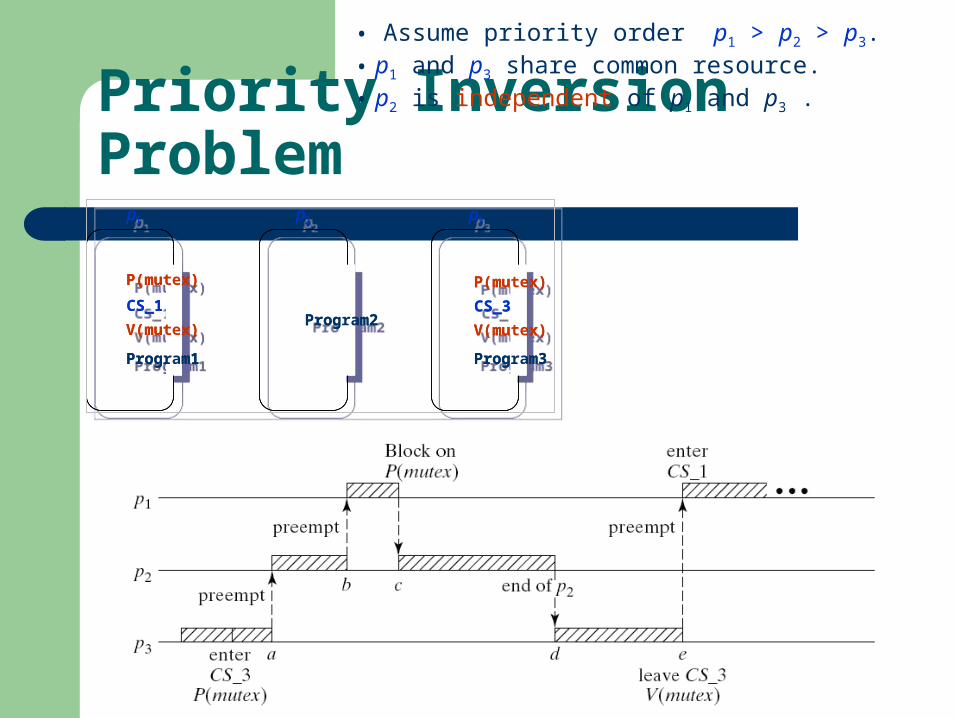
Priority Inversion Problem
• Assume priority order p1 > p2 > p3.• p1 and p3 share common resource.• p2 is independent of p1 and p3 .
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
Priority Inversion Problem
• Assume priority order p1 > p2 > p3.• p1 and p3 share common resource.• p2 is independent of p1 and p3 .
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
Priority Inversion Problem
• Assume priority order p1 > p2 > p3.• p1 and p3 share common resource.• p2 is independent of p1 and p3 .
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
(Unrelated) p2 may delay p1 indefinitely.
(Unrelated) p2 may delay p1 indefinitely.
Solutions
1. Make CSs nonpreemptable Practical is CSs are short and few Unsatisfactory if high-priority process often found themselves
waiting for lower-priority process, especially unrelated ones.
2. Naïve “solution”: Always run CS at priority of highest process that shares the CS
Problem: p1 cannot preempt lower-priority process inside CS, even when it does not try to enter CS -- a different form of priority inversion.
3. Dynamic Priority Inheritance See Next
Dynamic Priority Inheritance
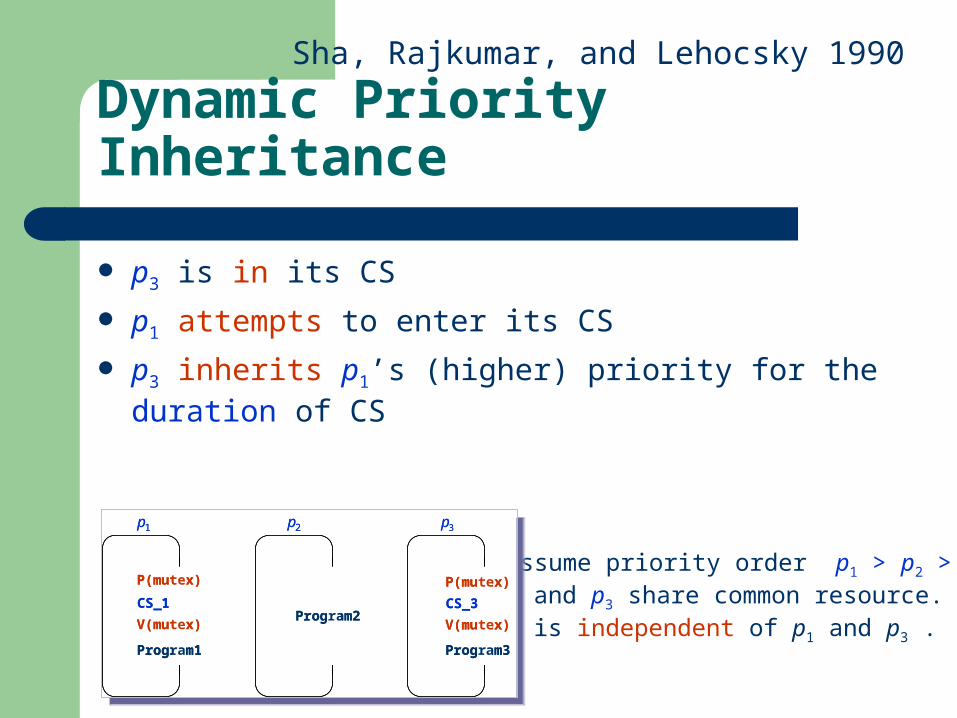
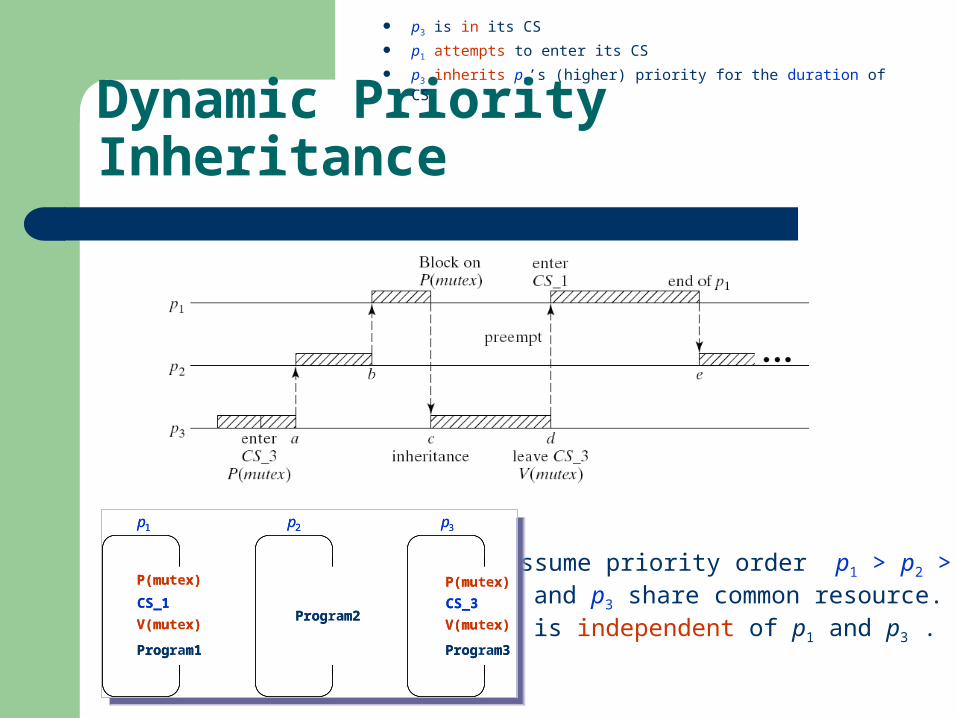
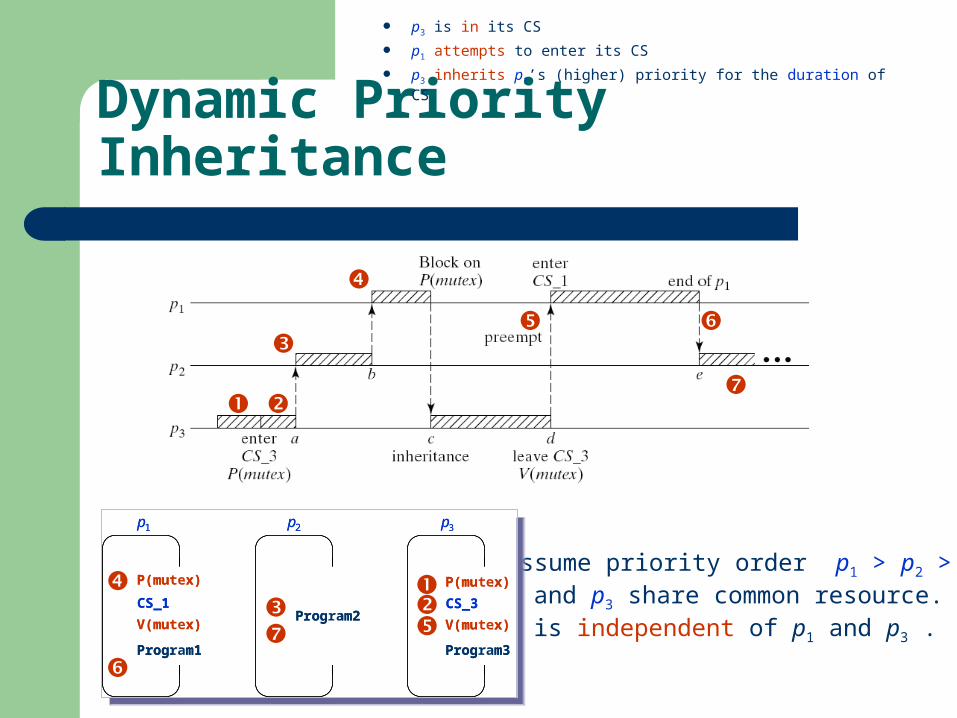
p3 is in its CS
p1 attempts to enter its CS
p3 inherits p1’s (higher) priority for the duration of CS
Sha, Rajkumar, and Lehocsky 1990
• Assume priority order p1 > p2 > p3.• p1 and p3 share common resource.• p2 is independent of p1 and p3 .
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
Dynamic Priority Inheritance
p3 is in its CS
p1 attempts to enter its CS
p3 inherits p1’s (higher) priority for the duration of CS
• Assume priority order p1 > p2 > p3.• p1 and p3 share common resource.• p2 is independent of p1 and p3 .
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
Dynamic Priority Inheritance
p3 is in its CS
p1 attempts to enter its CS
p3 inherits p1’s (higher) priority for the duration of CS
• Assume priority order p1 > p2 > p3.• p1 and p3 share common resource.• p2 is independent of p1 and p3 .
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
p1
P(mutex)
CS_1
V(mutex)
Program1
p1
P(mutex)
CS_1
V(mutex)
Program1
p2
Program2
p2
Program2
p3
P(mutex)
CS_3
V(mutex)
Program3
p3
P(mutex)
CS_3
V(mutex)
Program3
References Rensselaer Polytechnic Institute
http://www.cs.rpi.edu/academics/courses/fall04/os/c8/ University of east London Inside the Windows NT Scheduler, Part 1 Inside the Windows NT Scheduler, Part 2





























