Embed Size (px)
Citation preview

JUNI 2014
KØBENHAVNS KOMMUNE
OPI ITS TEAM 6
DYNAMISK
BUSPRIORITERING RAPPORT


JUNI 2014
KØBENHAVNS KOMMUNE
OPI ITS
DYNAMISK
BUSPRIORITERING RAPPORT
ADRESSE COWI A/S
Parallelvej 2
2800 Kongens Lyngby
TLF +45 56 40 00 00
FAX +45 56 40 99 99
WWW cowi.dk
PROJEKTNR. A046275
DOKUMENTNR. 2
VERSION 3.0
UDGIVELSESDATO 20. juni 2014
UDARBEJDET JTH
KONTROLLERET CANG
GODKENDT JTH


OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
5
INDHOLD
1 Baggrund 7
1.1 KBH 2025 Klimaplan 7
1.2 Trafikledelsesplan for KBH 7
1.3 OPI ITS-samarbejdet 8
2 Sammenfatning 9
3 Busprioritering i trafiksignalanlæg 10
3.1 Bedre kollektiv fremkommelighed 10
3.2 1980'ernes teknik 11
3.3 1990'ernes teknik 12
3.4 2000'ernes teknik 13
3.5 Seneste teknik i københavnsområdet 13
4 Innovationsprojektet 15
4.1 Konceptet 15
4.2 Proof of concept 17
5 Hvad bør der gøres ? 19
5.1 Politiske beslutninger 19
5.2 Aktion hos Københavns Kommune 19
5.3 Aktion hos Movia 20
Bilag 1: Proof of concept 21
Simulering 21
Fysisk implementering i et trafiksignalanlæg 26


OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
7
1 Baggrund
1.1 KBH 2025 Klimaplan
'KBH 2025 Klimaplan' er Københavns Kommunes plan for, hvordan byen skal bli-
ve CO2-neutral i 2025. Som et led heri er igangsat en række indsatser for at videre-
udvikle cykeltrafikken, benytte nye drivmidler i transportsektoren, udvikle den kol-
lektive transport og implementere intelligent trafikstyring og trafikinformation.
En af disse indsatser handler om, hvordan trafikledelse og Intelligente Transport
Systemer (ITS) kan sikre en mere glidende trafikafvikling og fremme brugen af
busser og cykler. Som grundlag for indsatsen har Teknik- og Miljøforvaltningen
igangsat dels udarbejdelse af en trafikledelsesplan og dels et Offentligt Privat In-
novationssamarbejde om udvikling af nye intelligente transportsystemer.
1.2 Trafikledelsesplan for KBH
Trafikledelsesplanen for Københavns Kommune er under udarbejdelse og forven-
tes ud fra en helhedsbetragtning at skulle udstikke retningslinjer for udformning af
trafikarealer og brug af ITS, herunder trafiksignaler, for byens enkelte vejstræknin-
ger under hensyn til eksempelvis:
› ruter for kollektiv trafik
› cykelruter
› skoleveje
› gangruter med stor tilgængelighed for alle
› fordelingsveje prioriteret for biltrafik
› ruter for parkeringssøgende
› ruter for varedistribution og -aflevering
› ruter for tung trafik
› udrykningsruter.
Trafikledelsesplanen forventes at dække byens indfalds- og fordelingsveje samt
strøggaderne. Målsætningerne formuleres i trafikledelsesplanen, hvor der for de
enkelte vejstrækninger redegøres for de lokale mål og for, hvordan vejstrækninger-
ne skal indrettes for at afvikle henholdsvis bil-, bus- og cykeltrafik, og for hvilke

8 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
trafikledelsessystemer, der skal tages i brug blandt andet til at prioritere mellem
transportformerne i knudepunkter.
Trafikledelsesplanen ventes fremover benyttet i forbindelse med kommunens trafi-
kale investeringer, så investeringerne foretages til størst mulig samlet nytte. Der er
således tale om et vigtigt planelement i forbindelse med kommunens kommende
arbejde med trafikplanlægning og ITS.
1.3 OPI ITS-samarbejdet
Københavns Kommune har i perioden nov. 2013 – apr. 2014 gennemført et Offent-
ligt Privat Innovationssamarbejde (OPI) om udvikling af nye intelligente transport-
systemer (ITS). Virksomheder og videninstitutioner var inviteret til at deltage i
samarbejdet, der havde fokus på følgende to hovedspørgsmål:
1. Hvordan kan vi via ITS opnå en mere intelligent udnyttelse af de eksisterende
gaderum?
2. Hvordan kan et samlet trafikledelsessystem sikre en effektiv og grøn mobilitet?
Der blev lagt vægt på koncepter, der er gennemtænkt både i forhold til implemente-
ring, dataopsamling, vedligehold og service, udbygningsmuligheder, etc. Der blev
derfor lagt vægt på, at der dannedes udviklingskonsortier med deltagelse af flere
forskellige fagligheder.
I alt otte teams gennemførte forløbet, heriblandt 'Team 6' med deltagelse af Imtech
Traffic & Infra A/S, Infrateam og COWI A/S. Team 6 samarbejdede med repræ-
sentanter fra henholdsvis Teknik- og Miljøforvaltningen og Økonomiforvaltningen
om 'dynamisk busprioritering' som beskrevet i det følgende.

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
9
2 Sammenfatning
Københavns Kommunes teknik- og miljøudvalg ventes i aug. 2014 at tage stilling
den kommende trafikledelsesplan og forventes dermed at give svar på, hvor og
hvor stærkt busserne skal prioriteres i forhold til den øvrige trafik.
Det er således et politisk spørgsmål:
› Hvor stærk prioriteringen af busser må være på bekostning af anden trafik.
Det er desuden et politisk spørgsmål:
› Hvor let det skal være at etablere og drive prioritering af busser gennem tra-
fiksignalanlæg, der kræver beslutning hos både trafikselskab og vejbestyrelse.
I OPI-projektet har Team 6 foreslået et koncept for dynamisk busprioritering, der
giver nye muligheder for prioritering eksempelvis ved forsinkelse. Konceptet er
baseret på et alment anvendeligt prioriteringssystem, der er opdelt i henholdsvis
køretøjssystemer og signalsystemer, der kommunikerer via en fælles grænseflade.
Prioriteringssystemet kan håndtere uafhængige køretøjssystemer for eksempelvis
Movias busser, letbaner, redningskorps, politi og evt. andre autoriserede køretøjs-
systemer omfattende eksempelvis cykler eller lastvogne, der er udstyret med det
fornødne udstyr. Prioriteringssystemet kan desuden håndtere uafhængige signalsy-
stemer hos vejbestyrelserne. Konceptet er baseret på, at det nu er muligt at gen-
nemføre trådløs kommunikation mellem køretøjer og signalanlæg via centralenhe-
der med en tilstrækkelig hastighed som følge af 3G- og 4G-mobilteknologi.
I OPI-projektet er påvist, at dynamisk busprioritering har åbenlyse fordele i forhold
til at opnå bedre fremkommelighed og større regularitet for den kollektive trafik på
vejene. Desuden vurderes konceptet at kunne lette etablering af prioriteringssyste-
mer ikke bare i Movia-området, men i hele landet.
Dynamisk busprioritering er et tidssvarende værktøj, der er velegnet til at give bus-
ser prioritet afhængig af anvisningerne i trafikledelsesplanen. OPI-projektets Team
6 anbefaler derfor, at der søges politisk beslutning om i hvilket omfang, der skal
afsættes ressourcer til at opbygge og implementere dynamisk busprioritering.

10 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
3 Busprioritering i trafiksignalanlæg
3.1 Bedre kollektiv fremkommelighed
Gennem de seneste årtier er der i københavnsområdet anvendt en række forskellige
tiltag for at opnå en bedre fremkommelighed for den kollektive bustrafik. Tiltagene
består eksempelvis af etablering af busbaner, optimal placering af busstoppesteder i
forhold til kryds samt prioritering af busser i trafiksignalanlæg.
3.1.1 Prioriteringens styrke
Prioritering af busser i signalanlæg kan gives på forskellig vis og afhænger af bus-
sens position og hastighed samt af, hvornår i signalomløbet behovet for prioritering
registreres. Prioriteringen kan ske i form af:
› forlængelse af grønt i kørselsretningen
› fremskyndelse af grønt i kørselsretningen ved hurtig afslutning af grønt i tvær-
retningen
› aktivering af bussignaler ved busbaner
Hvor stærk prioriteringen må være og må ske på bekostning af den øvrige
trafik, er et politisk spørgsmål.
Københavns Kommunes kommende trafikledelsesplan forventes at give svar på,
hvor og hvor stærkt busserne skal prioriteres på bekostning af den øvrige trafik.
Mulighederne for at prioritere busserne kan eksempelvis variere mht.:
› varigheden af forlængelse og fremskyndelse af grønt
› lokaliteten og dermed hensyn til andre transportformer
› tiden på døgnet
› buslinjens vigtighed
› antallet af passagerer i bussen eller ved kommende stoppesteder
› bussens rettidighed i forhold til køreplanen
› bussens position i forhold til forankørende eller bagvedkørende busser

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
11
3.1.2 Prioriteringens lethed
Prioritering af busser i trafiksignalanlæg kræver beslutning, planlægning og tekno-
logi, der kan modsvare den ønskede grad af prioritering. Gennem de seneste årtier
har trafikselskaber og vejbestyrelser derfor eksperimenteret med forskellige tekno-
logier til lokalisering af busser og kommunikation mellem køretøjer og trafiksig-
nalanlæg.
Løsninger kræver forskellig grad af koordinering mellem trafikselskaber og vejbe-
styrelser og stiller forskellige krav til udstyr i busser, centraludstyr og signalanlæg,
hvilket begrænser hvor let det er at etablere og drive forskellige typer af buspriori-
tering.
I københavnsområdet gives i dag kun mulighed for at prioritere busserne mht.:
› varigheden af forlængelse og fremskyndelse af grønt
› lokaliteten
› tiden på døgnet
Hvor let det skal være at etablere og drive prioritering af busser gennem tra-
fiksignalanlæg er et politisk spørgsmål, der kræver beslutning hos både tra-
fikselskab og vejbestyrelse.
I det følgende karakteriseres de teknologier, der er anvendt gennem de seneste årti-
er som udgangspunkt for at vurdere det forslag til 'dynamisk busprioritering', som
er beskrevet i Københavns Kommunes OPI-projekt af team 6.
3.2 1980'ernes teknik
Figur 3-1 Induktionsspoler i kørebanen og lokal styring
Siden 1980'erne har det været almindeligt at anvende induktionsspoler til at detek-
tere, hvornår en bus passerer givne punkter i forhold et signalanlæg. Induktionsspo-
ler nedlægges i kørebanen og kan der registrere, at en metalmasse af en given ud-
strækning passerer. Spolerne placeres i en afstand fra stoplinjen, der afhænger af
den forventede kørehastighed mellem spolen og stoplinjen. Spolerne placeres, så
signalanlægget får:
› et forvarsel, der kan anvendes til at give rødt for tværgående trafik
› en bekræftelse på, at bussen snart passerer, så grønt fortsat kan opretholdes
indenfor givne rammer
› en afmelding, når bussen har passeret krydset
12 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
Fordelen er:
› At busser kan prioriteres:
Ulemperne er:
› Prioriteringen gives til alle busser og efter "Først til mølle"-princippet, uanset
om bussen har behov for prioriteringen, hvilket kan bevirke at forsinkede bus-
ser ikke får prioritering
› At andre store køretøjer detekteres, hvor busprioriteringen anvendes for busser
i blandet trafik
› Detektorer skal nedlægges og vedligeholdes i kørebane. Dette er så omkost-
ningstungt, at Københavns Kommune har valgt at se bort fra denne mulighed i
nye projekter.
3.3 1990'ernes teknik
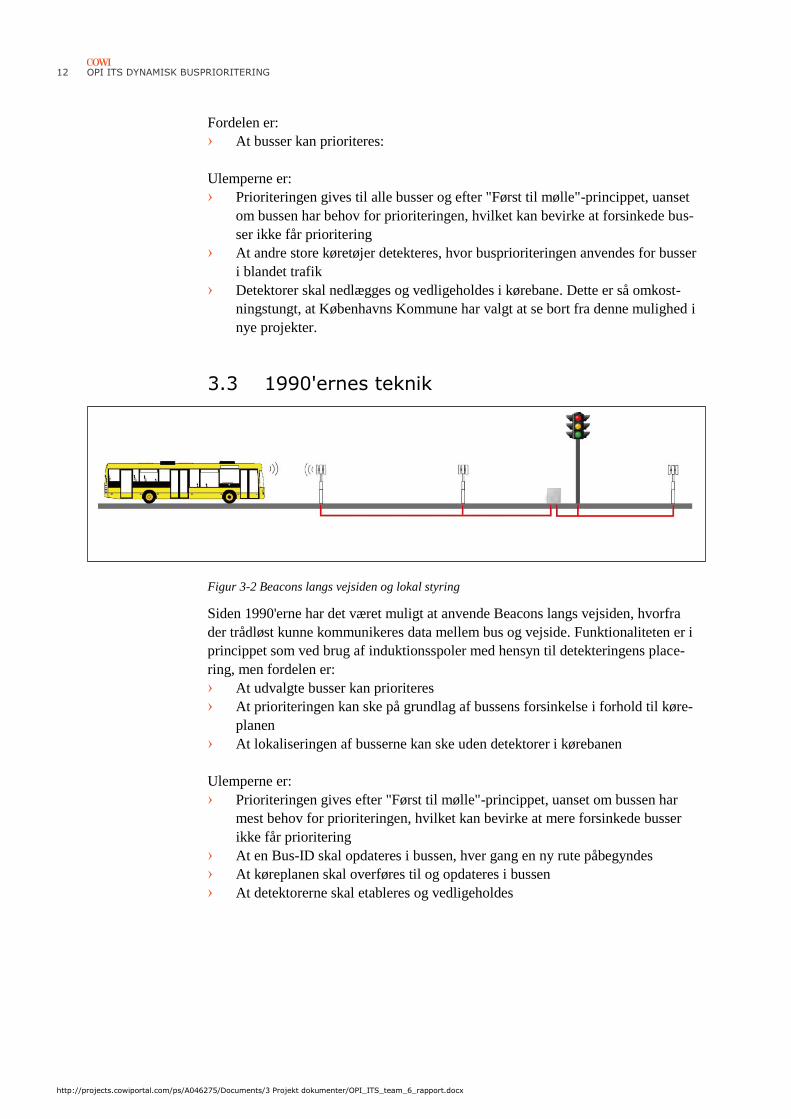
Figur 3-2 Beacons langs vejsiden og lokal styring
Siden 1990'erne har det været muligt at anvende Beacons langs vejsiden, hvorfra
der trådløst kunne kommunikeres data mellem bus og vejside. Funktionaliteten er i
princippet som ved brug af induktionsspoler med hensyn til detekteringens place-
ring, men fordelen er:
› At udvalgte busser kan prioriteres
› At prioriteringen kan ske på grundlag af bussens forsinkelse i forhold til køre-
planen
› At lokaliseringen af busserne kan ske uden detektorer i kørebanen
Ulemperne er:
› Prioriteringen gives efter "Først til mølle"-princippet, uanset om bussen har
mest behov for prioriteringen, hvilket kan bevirke at mere forsinkede busser
ikke får prioritering
› At en Bus-ID skal opdateres i bussen, hver gang en ny rute påbegyndes
› At køreplanen skal overføres til og opdateres i bussen
› At detektorerne skal etableres og vedligeholdes

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
13
3.4 2000'ernes teknik
Figur 3-3 GPS-detektering og lokal styring
Siden udgangen af 1990'erne har det været muligt at anvende GPS til at lokalisere
busser med stadig øget præcision og at kommunikeres data mellem bus og det lo-
kale styreapparat. Funktionaliteten er i princippet som ved brug af induktionsspoler
med hensyn til placering af detektorpunkter, men fordelen er:
› At udvalgte busser kan prioriteres
› At prioriteringen kan ske på grundlag af bussens forsinkelse i forhold til køre-
planen
› At lokaliseringen af busserne kan ske uden detektorer i kørebanen
Ulemperne er:
› Prioriteringen gives efter "Først til mølle"-princippet, uanset om bussen har
mest behov for prioriteringen, hvilket kan bevirke at mere forsinkede busser
ikke får prioritering
› At en Bus-ID skal opdateres i bussen, hver gang en ny rute påbegyndes
› At køreplanen skal overføres til og opdateres i bussen
› At detektorpunkter skal overføres til bus (vejbestyrelse <-> trafikselskab)
› At information om prioriterede ruter skal udveksles(vejbestyrelse<-
>trafikselskab)
3.5 Seneste teknik i københavnsområdet
Figur 3-4 GPS-detektering og lokal styring i københavnsområdet

14 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
I de seneste år har det i københavnsområdet været muligt at anvende GPS til at lo-
kalisere busser med stadig øget præcision og at kommunikeres data fra busserne
via en centralenhed hos Movia til de lokale styreapparater. Med hensyn til place-
ring af detekteringspunkter er funktionaliteten i princippet som ved brug af induk-
tionsspoler.
Fordelene er:
› At busser kan prioriteres
› At lokaliseringen af busserne kan ske uden detektorer i kørebanen
Ulemperne er:
› At prioriteringen gives til alle busser og efter "Først til mølle"-princippet, uan-
set om bussen har behov for prioriteringen, hvilket kan bevirke at forsinkede
busser ikke får prioritering
Senest er det i forbindelse med innovationsprojektet blevet muligt at kommunike-
res data fra busserne via en centralenhed hos Movia og videre via en centralenhed
hos Københavns Kommune til det lokale styreapparat, hvor den fulde styring fort-
sat foregår. Herved er der imidlertid taget skridt til at indføre en central styring af
busprioriteringen som beskrevet i det følgende koncept for OPI-projektet.

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
15
4 Innovationsprojektet
4.1 Konceptet
Figur 4-1 Dynamisk busprioritering baseret på GPS og central styring uden faste detekteringspunkter
Innovationsprojektets koncept for dynamisk busprioritering er baseret på et alment
anvendeligt prioriteringssystem, der er opdelt i henholdsvis køretøjssystemer og
signalsystemer, der kommunikerer mellem aktørernes centralenheder via en fælles
grænseflade, som vist i Figur 4-2.
Prioriteringssystemet kan håndtere uafhængige køretøjssystemer for eksempelvis
Movias busser, letbaner, redningskorps, politi og evt. andre autoriserede køretøjs-
systemer omfattende eksempelvis cykler eller lastvogne, der er udstyret med det
fornødne udstyr.
Prioriteringssystemet kan desuden håndtere uafhængige signalsystemer hos vejbe-
styrelserne.
Konceptet er desuden baseret på:
› at hver part har ansvar for funktionalitet og drift af egne centralenhederat det
nu er muligt at gennemføre trådløs kommunikation mellem køretøjer og sig-
nalanlæg via centralenheder med en tilstrækkelig hastighed som følge af 3G-
og 4G-mobilteknologi.
16 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
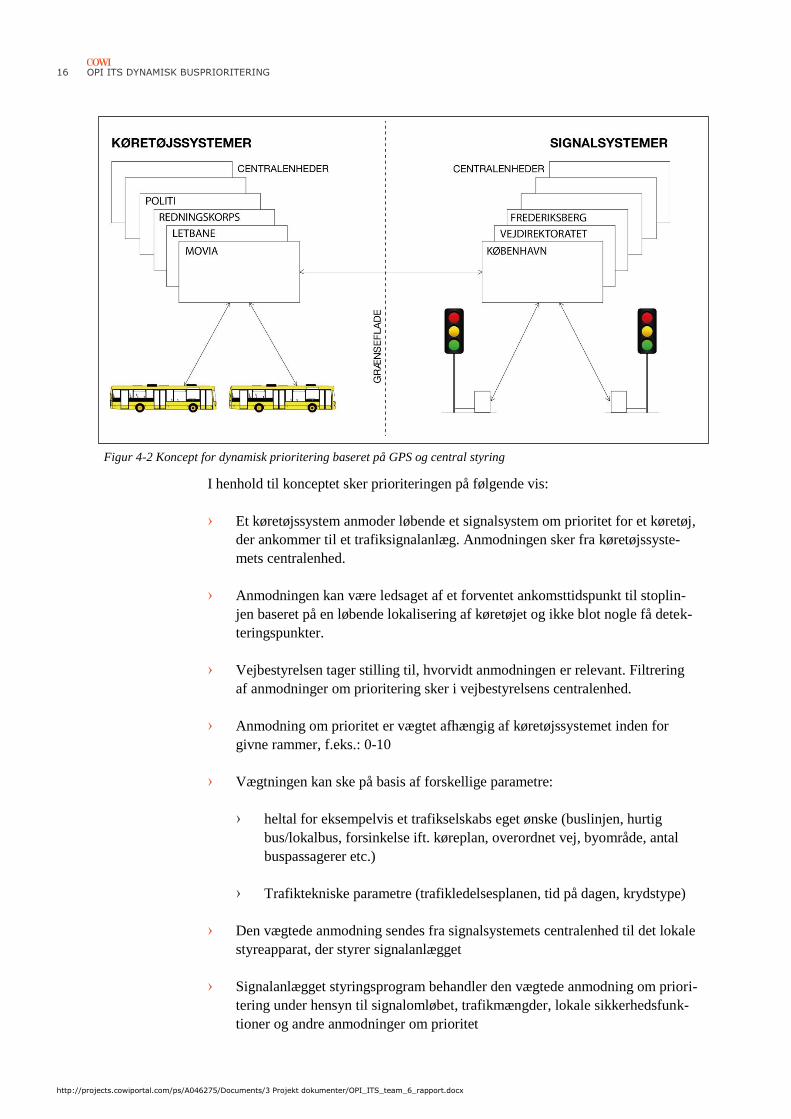
Figur 4-2 Koncept for dynamisk prioritering baseret på GPS og central styring
I henhold til konceptet sker prioriteringen på følgende vis:
› Et køretøjssystem anmoder løbende et signalsystem om prioritet for et køretøj,
der ankommer til et trafiksignalanlæg. Anmodningen sker fra køretøjssyste-
mets centralenhed.
› Anmodningen kan være ledsaget af et forventet ankomsttidspunkt til stoplin-
jen baseret på en løbende lokalisering af køretøjet og ikke blot nogle få detek-
teringspunkter.
› Vejbestyrelsen tager stilling til, hvorvidt anmodningen er relevant. Filtrering
af anmodninger om prioritering sker i vejbestyrelsens centralenhed.
› Anmodning om prioritet er vægtet afhængig af køretøjssystemet inden for
givne rammer, f.eks.: 0-10
› Vægtningen kan ske på basis af forskellige parametre:
› heltal for eksempelvis et trafikselskabs eget ønske (buslinjen, hurtig
bus/lokalbus, forsinkelse ift. køreplan, overordnet vej, byområde, antal
buspassagerer etc.)
› Trafiktekniske parametre (trafikledelsesplanen, tid på dagen, krydstype)
› Den vægtede anmodning sendes fra signalsystemets centralenhed til det lokale
styreapparat, der styrer signalanlægget
› Signalanlægget styringsprogram behandler den vægtede anmodning om priori-
tering under hensyn til signalomløbet, trafikmængder, lokale sikkerhedsfunk-
tioner og andre anmodninger om prioritet

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
17
Fordelene er bl.a.:
› At udvalgte køretøjer kan prioriteres
› At køretøjer kan følges hele vejen frem til og igennem signalanlægget uanset,
at der opstår uventede forsinkelser undervejs.
› At der gives forbedret mulighed for at understøtte den kommende trafikledel-
sesplan afhængig af buslinjens vigtighed, bussens forsinkelse, antal passagerer
etc.
› At regulariteten af bussers ankomst til stoppesteder kan forbedres ved primært
at prioritere busser med en vis forsinkelse
› At mulighed for teknisk etablering af busprioritering i København og resten af
Movia-området gøres lettere, når centralenhederne er etableret
› At der kan anvendes separate køretøjssystemer for forskellige 'flådeejere' (bus,
letbane, udrykning etc.)
› At der kan anvendes separate signalsystemer for forskellige vejbestyrelser
› At prioritering kan implementeres og ændres centralt, når centralenheder og
styreapparater er forberedt for det.
› At opdatering af data kan ske centralt hos og under ansvar af den relevante
myndighed, hvorved ansvar for fejl og nedbrud bliver lettere at placere
› At systemet ikke kræver andet udstyr i køretøjer end udstyr til at kommunike-
re med en centralenhed om, hvor køretøjet befinder sig.
› At information om prioriterede ruter gennem signalanlæg kan udveksles mel-
lem signalsystem og køretøjssystem
Ulemperne er:
› At systemet kræver en politisk beslutning mellem samarbejdspartnere om at
igangsætte udvikling og implementering af systemer på egen side af den fæl-
les grænseflade.
› At den løbende drift kan kræve flere ressourcer, end der anvendes i dag, hvil-
ket ikke er undersøgt nærmere.
4.2 Proof of concept
Som led i OPI-projektet vedrørende dynamisk busprioritering er gennemført et
'proof-of-concept', der gennem test skal vise, at konceptet er teknisk gennemførligt
og kan give værdi for brugerne.

18 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
Hensigten med testen har været gennem simulering at vise eksempler på:
1 Hvordan regulariteten for busser kan forbedres ved at sikre mest prioritet til
forsinkede busser
2 Hvordan forskellige niveauer af prioritet kan etableres afhængig af lokalitet,
trafikmængder og vigtigheden af buslinjen
Københavns Kommune ønsker endvidere efter OPI-projektet at teste:
3 Hvordan løsningen kan implementeres fysisk i et enkelt signalanlæg
'Proof of concept' findes som Bilag 1 til denne rapport

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
19
5 Hvad bør der gøres ?
5.1 Politiske beslutninger
Københavns Kommunes teknik- og miljøudvalg ventes i maj 2014 at tage stilling
den kommende trafikledelsesplan og forventes dermed at give svar på, hvor og
hvor stærkt busserne skal prioriteres i forhold til den øvrige trafik.
Dynamisk busprioritering er et tidssvarende værktøj, der er velegnet til at give bus-
ser prioritet afhængig af prioriteringerne i trafikledelsesplanen. OPI-projektets
Team 6 anbefaler derfor, at der søges en politisk beslutning om i hvilket omfang,
der skal afsættes ressourcer til at kunne opbygge og implementere dynamisk
busprioritering.
5.2 Aktion hos Københavns Kommune
Opbygning og implementering af dynamisk busprioritering kan eksempelvis omfat-
te følgende indledende aktioner hos Københavns Kommune:
› Gennemførelse af en testimplementering i et trafiksignalanlæg som beskrevet i
Bilag 1: Proof of concept med assistance fra Imtech og Infrateam
› Stillingtagen til, hvorvidt det er ønskeligt at implementere og drive dynamisk
busprioritering
Og i givet fald:
› Undersøgelse af, hvorvidt Movia er interesseret i at implementere og drive den
udbyggede funktionalitet i køretøjssystemets centralenhed
› Kravspecifikation for centralenheden hos CFT
› Stillingtagen til, hvordan signalsystemets dynamiske busprioritering skal op-
bygges, implementeres og drives

20 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
5.3 Aktion hos Movia
Opbygning og implementering af dynamisk busprioritering kan eksempelvis omfat-
te følgende indledende aktioner hos Movia:
› Stillingtagen til, hvordan Movia mest hensigtsmæssigt kan udbygge og drive
centralenheden i køretøjssystemet
› Kravspecifikation for køretøjssystemets centralenhed, herunder stillingtagen
til:
› Den videre udbygning af funktionalitet og kriterier ift. dynamisk busprio-
ritering
› Evt. funktionalitet af internt værktøj til at opretholde afstand mellem bus-
ser
› Dialog med busoperatører om levering af data med henblik på evt. kontraktli-
ge tilretninger

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
21
Bilag 1: Proof of concept
Som led i OPI-projektet vedrørende dynamisk busprioritering er gennemført et
'proof-of-concept', der gennem test skal vise, at konceptet er teknisk gennemførligt
og kan give værdi for brugerne.
Hensigten med testen har været gennem simulering at vise eksempler på:
1 Hvordan regulariteten for busser kan forbedres ved at sikre mest prioritet til
forsinkede busser
2 Hvordan forskellige niveauer af prioritet kan etableres afhængig af lokalitet,
trafikmængder og vigtigheden af buslinjen, eksempelvis ved at fjerne kødan-
nelser i god tid, inden bussen ankommer til signalanlægget.
Københavns Kommune ønsker endvidere efter OPI-projektet at teste:
3 Hvordan løsningen kan implementeres fysisk i et enkelt signalanlæg
Simulering
Københavns Kommune har stillet forskellige simuleringsmodeller til rådighed for
testen, herunder modeller for henholdsvis:
› Valby-området
› COMPASS 4D-modellen for strækningen mellem Hovedbanegården via Kon-
gens Nytorv til Lille Trianglen
› H. C. Andersens Boulevard
› Østerbrogade på strækningen mellem Lille Trianglen og Svanemøllen
Fordele og ulemper ved de enkelte modeller er gennemgået i samråd med Køben-
havns Kommune. Det endelige valg faldt på Østerbrogade-modellen, der på det
givne tidspunkt, var den mest komplette og bedst egnede til kommunens evt. videre
afprøvning af busprioriteringstiltag, uanset at dele af Østerbrogade er karakteriseret
ved relativt lave trafikmængder.

22 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
Modellen er anvendt til at teste niveauet af forsinkelse for busser og anden trafik
ved eksempler på forskellige typer af busprioritering og med forskellig styrke som
beskrevet i det følgende.
Forsinkelse er her defineret som den tid signalanlæg og afvikling af den øvrige tra-
fik forsinker et køretøj i forhold til en situation med uhindret kørsel på den givne
strækning.
Resultaterne er eksempler for den givne strækning og kan variere fra lokalitet til
lokalitet og på forskellige tidspunkter af døgnet.
Forlængelse af grønt
I Figur 0-1 og Tabel 0-1 er vist resultatet af simuleringer af forsinkelse ved forskel-
lige styrker af busprioritering baseret på forskellig forlængelse af grønt og maksi-
mal afkortning af grønt for sideretningen. Simuleringerne er gennemført for en
strækning på Østerbrogade, der omfatter de tre signalregulerede kryds ved hhv.
Nøjsomhedsvej, Jagtvej og Nygårdsvej. Ved simuleringerne er det antaget, at 50 %
af busserne er forsinkede, når de ankommer til den pågældende strækning. Der er
foretaget simuleringer for følgende situationer:
› Uden Busprioritering
› Med den eksisterende busprioritering med mulighed for 8 sek. forlængelse i
hovedretningen ad Østerbrogade og 6 sek. i sideretningen ad Jagtvej
› Med busprioritering med mulighed for 15 sek. forlængelse i hovedretningen
ad Østerbrogade og 6 sek. i sideretningen ad Jagtvej
› Med busprioritering med mulighed for 15 sek. forlængelse kun for forsinkede
busser i hovedretningen ad Østerbrogade og 6 sek. i sideretningen ad Jagtvej
› Med busprioritering med mulighed for 30 sek. forlængelse kun for forsinkede
busser i hovedretningen ad Østerbrogade og 6 sek. i sideretningen ad Jagtvej.
I Figur 0-1 og Tabel 0-1 er vist resultatet for hhv.:
› Rettidige busser ad Østerbrogade
› Forsinkede busser ad Østerbrogade
› Busser ad Jagtvej, der skærer Østerbrogade
› Øvrig biltrafik ad Østerbrogade
› Øvrig biltrafik ad Jagtvej
› Cykeltrafik ad Østerbrogade
› Cykeltrafik ad Jagtvej

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
23
Figur 0-1 Eksempel på forsinkelse med forskellige grader af busprioritering ved forlængelse af
grønt
Index for forsinkelse Ud
en b
usp
rio
teri
ng
Bu
spri
ori
teri
ng
med
mu
ligh
ed f
or
8 s
eku
nd
ers
forl
æn
gels
e i h
ove
dre
tnin
gen
og
6 s
eku
nd
er i
sid
eret
nin
gen
(ek
sist
eren
de
bu
spri
ori
teri
ng)
Bu
spri
ori
teri
ng
med
mu
ligh
ed f
or
8 s
eku
nd
ers
forl
æn
gels
e fo
r re
ttid
ige
bu
sser
og
30
sek
un
-
der
fo
rlæ
nge
lse
for
fors
inke
de
bu
sser
i h
ove
d-
retn
ing,
sam
t 6
sek
un
der
i si
der
etn
inge
n
Bu
spri
ori
teri
ng
med
mu
ligh
ed f
or
15
sek
un
-d
ers
forl
æn
gels
e i h
ove
dre
tnin
gen
og
6 s
e-
kun
der
i si
der
etn
inge
r
Bu
spri
ori
teri
ng
med
mu
ligh
ed f
or
15
sek
un
-
der
s fo
rlæ
nge
lse
i ho
ved
retn
inge
n (
kun
fo
r fo
rsin
ked
e b
uss
er)
og
6 s
eku
nd
er i
sid
eret
nin
-ge
r
Bu
spri
ori
teri
ng
med
mu
ligh
ed f
or
30
sek
un
-
der
s fo
rlæ
nge
lse
i ho
ved
retn
inge
n (
kun
fo
r fo
rsin
ked
e b
uss
er)
og
6 s
eku
nd
er i
sid
eret
nin
-ge
r
Bus (rettidige) - Hovedretning 100 90 105 86 111 111
Bus (forsinkede) - Hovedretning 100 90 74 86 83 73
Bus - Sideretning 100 101 101 101 90 103
Bil - Hovedretning 100 95 93 92 96 94
Bil - Sideretning 100 111 117 114 106 113
Cykel - Hovedretning 100 100 96 99 99 96
Cykel - Sideretning 100 111 119 117 106 114
Tabel 0-1 Eksempel på forsinkelse med forskellige grader af busprioritering ved forlængelse af
grønt (Index for forsinkelse)
0
20
40
60
80
100
120
140
Bus (rettidige) -Hovedretning
Bus (forsinkede) -Hovedretning
Bus - Sideretning Bil - Hovedretning Bil - Sideretning Cykel - Hovedretning Cykel - Sideretning
Uden buspriotering
Busprioritering med mulighed for 8 sekundersforlængelse i hovedretningen og 6 sekunder isideretningen (eksisterende busprioritering)
Busprioritering med mulighed for 15 sekundersforlængelse i hovedretningen og 6 sekunder isideretninger
Busprioritering med mulighed for 15 sekundersforlængelse i hovedretningen (kun forforsinkede busser) og 6 sekunder i sideretninger
Busprioritering med mulighed for 8 sekundersforlængelse for rettidige busser og 30 sekunderforlængelse for forsinkede busser ihovedretning, samt 6 sekunder i sideretningen
Busprioritering med mulighed for 30 sekundersforlængelse i hovedretningen (kun forforsinkede busser) og 6 sekunder i sideretninger
Index for forsinkelse
50% af busserne i hovedretningen er forudsat at være forsinket

24 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
Resultaterne viser for den prioriterede bustrafik:
› Ca. 10 % reduceret forsinkelse ved den eksisterende busprioritering, hvor der
tillades 8 sek. forlængelse af grønt
› Ca. 15 % reduceret forsinkelse ved at styrke busprioriteringen for alle busser
ad Østerbrogade, så der tillades 15. sek. forlængelse
› Næsten 20 % reduceret forsinkelse for forsinkede busser, når den eksisterende
busprioritering tillades for rettidige busser på Østerbrogade, mens forsinkede
busser kan forlænge grønt i op til 15 sek.
› Godt 25 % reduceret forsinkelse for forsinkede busser, når forsinkede busser
på Østerbrogade kan forlænge grønt i op til 30 sek.
› At det er muligt at prioritere busserne stærkere i hovedretningen uden, at det
er gået ud over busserne fra sideretningen.
Den forøgede busprioritering i forhold til i dag har effekter på den øvrige trafik
som vist i Tabel 0-1:
› Bil- og cykeltrafikken i hovedretningen får en reduceret forsinkelse i størrel-
sesordenen hhv. 5-8 % og 1-4 %.
› Bil- og cykeltrafikken i sideretningen får en øget forsinkelse i størrelsesorde-
nen hhv. 6-17 % og 6-19 %.
Afvikling af kø før ankomst af bus
I Figur 0-2 og Tabel 0-2 er vist resultatet af simuleringer af forsinkelse ved forskel-
lige styrker af busprioritering baseret på en tidlig anmeldelse af ankommende bus-
ser og med mulighed for at rømning af kryds for kødannelser, inden bussen når
frem. Simuleringerne er gennemført for prioritering ad Jagtvej, hvor den krydser
Østerbrogade. Ved simuleringerne er det antaget, at 50 % af busserne er forsinke-
de, når de anmelder sig inden det pågældende kryds. Der er foretaget simuleringer
for følgende situationer.
› Med den eksisterende busprioritering med mulighed for 8 sek. forlængelse i
hovedretningen ad Østerbrogade og 6 sek. i sideretningen ad Jagtvej
› Med busprioritering med mulighed for køafvikling for alle busser fra vest ad
Jagtvej.
› Med busprioritering med mulighed for køafvikling kun for forsinkede busser
fra vest ad Jagtvej.

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
25
I Figur 0-2 og Tabel 0-2 er vist resultatet for hhv.:
› Rettidige busser ad Jagtvej
› Forsinkede busser ad Jagtvej
› Busser ad Østerbrogade, der passerer Jagtvej
› Øvrig biltrafik ad Jagtvej
› Øvrig biltrafik ad Østerbrogade
› Cykeltrafik ad Jagtvej
› Cykeltrafik ad Østerbrogade
Figur 0-2 Eksempel på forsinkelse med busprioritering ved forlængelse af grønt og afvikling af
kø før ankomst af bus
Busprioritering med mulighed for 8 se-kunders forlængelse i hovedretningen og 6 sekunder i sideret-ningen (eksisterende busprioritering)
Busprioritering med mulighed for køafvik-ling i hovedretningen fra vest samt eksiste-rende busprioritering (alle busser kan akti-vere/prioriteres)
Busprioritering med mulighed for køaf-vikling i hovedret-ningen fra vest (for-sinkede busser kan aktivere) samt eksi-sterende buspriori-tering (alle busser kan prioriteres)
Bus (rettidige) - Hovedretning fra vest 100 74 79
Bus (forsinkede) - Hovedretning fra vest 100 74 56
Bus - Sideretning 100 130 125
Bil - Hovedretning 100 92 96
Bil – Sideretning 100 125 123
Cykel - Hovedretning 100 72 71
Cykel – Sideretning 100 131 127
Tabel 0-2 Eksempel på forsinkelse med busprioritering ved forlængelse af grønt og afvikling af
kø før ankomst af bus (Index for forsinkelse)
0
20
40
60
80
100
120
140
Bus (rettidige) -Hovedretning fra vest
Bus (forsinkede) -Hovedretning fra vest
Bus - Sideretning Bil - Hovedretning Bil - Sideretning Cykel - Hovedretning Cykel - Sideretning
Busprioritering med mulighed for 8 sekundersforlængelse i hovedretningen og 6 sekunder isideretningen (eksisterende busprioritering)
Busprioritering med mulighed for køafvikling ihovedretningen fra vest samt eksisterendebusprioritering (alle busser kanaktivere/prioriteres)
Busprioritering med mulighed for køafvikling ihovedretningen fra vest (forsinkede busser kanaktivere) samt eksisterende busprioritering (allebusser kan prioriteres)
Index for forsinkelse
50% af busserne i hovedretningen er forudsat at være forsinket

26 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
Resultaterne viser for den prioriterede bustrafik:
› Godt 25 % reduceret forsinkelse, når alle busser på Jagtvej, kan anmelde og få
afviklet en kø inden ankomst til et kryds
› Godt 45 % reduceret forsinkelse, når forsinkede busser på Jagtvej, kan anmel-
de og få afviklet en kø inden ankomst til et kryds
Den forøgede busprioritering i forhold til i dag har effekter på den øvrige trafik
som vist i Tabel 0-2:
› Bil- og cykeltrafikken i hovedretningen får en reduceret forsinkelse i størrel-
sesordenen hhv. 4-8 % og knap 30 %.
› Bil- og cykeltrafikken i sideretningen får en øget forsinkelse i størrelsesorde-
nen hhv. ca. 25 % og ca. 30 %.
Fysisk implementering i et trafiksignalanlæg
Københavns Kommune ønsker efter OPI-projektet at teste, hvordan løsningen kan
implementeres fysisk i et enkelt trafiksignalanlæg.
Udgangspunktet for implementeringen
Imtech Traffic & Infra A/S og Infrateam er efter OPI-projektet klar til at gå i gang
med denne del af forløbet. Infrateam udvikler infrastruktursystemer, herunder bl.a.
trafiksystemer. Imtech Traffic & Infra A/S er i forvejen ved at genoprette, udskifte
og vedligeholde Københavns Kommunes trafiksignaler på en kontrakt, der gælder
frem til 2019 med mulighed for forlængelse frem til 2021. Når fornyelsen er gen-
nemført i 2014, råder Københavns Kommune over:
› En ny ”state of the art” server til trafikovervågning og trafikledelse
› Nye eller opgraderede styreapparater på alle de vigtigste indfaldsveje, på de
vigtigste A og S buslinjer og de vigtigste cykelruter
› Internetbaserede kommunikationsforbindelser mellem de enkelte kryds og en
central server
› Et mere driftssikkert system (færre fejl og mere effektiv fejlfinding)
Implementeringen forventes at ske i to trin:
› Testserveren udvikles og forbindes til et styreapparat, der forbindes til en si-
muleringsmodel (VISSIM) for test
› Dernæst implementeres test-løsningen på gadeniveau.

OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
27
Funktionalitet af testimplementering
Testimplementeringens opbygning og funktionalitet vil afhænge af, hvorvidt det er
muligt at koordinere tiltaget med Movias centrale flådeovervågningssystem.
I dag anvendes i samarbejde mellem Movia, Center for trafik (CFT) og Imtech et
interface mellem Movia’s flådeovervågningssystem og CFT’s trafik management
platform.
Dette interface tillader, at et signal sendes fra Movia, når en bus nærmer sig et sig-
nalreguleret kryds, til en dedikeret tjeneste hos CFT. Herfra sendes et ønske om
grønt til det berørte trafiksignalanlæg.
Ved at udvide dette interface til en egentlig protokol, med en række standardisere-
de og dokumentrede angivelser og forespørgsler, kan det anvendes til generelt at
informere om trafik og dennes ønsker om prioritet fra flere parter.
Denne protokol kan således leveres til åben anvendelse af alle ønskede parter, men
naturligvis kun gennem sikrede kommunikationskanaler.
Protokollen skal indeholde data om lokalitet, retning, identitet, og prioritet vægt.
Denne vægt adskiller sig fra tidligere simpelt ønske om prioritet, til at angive hvor
vigtigt denne prioritet er for den afsendende part.
Eksempelvis:
Det eksisterende system angiver et koordinatsæt med en retning, hvor en bus be-
finder sig, hvilket tolkes som en anmodning til et trafiksignalanlæg om at give
grønt, hvis det er muligt.
I testsystemet indeholder en anmodning om prioritering fortsat et koordinatsæt med
en retning, hvor en bus befinder sig, men suppleret af eksempelvis:
› vægten 0, hvilket tolkes som en anmodning til et trafiksignalanlæg om at give
grønt, hvis det er muligt.
› vægten 10, hvilket tolkes som en anmodning til et trafiksignalanlæg om at gi-
ve grønt til en forsinket bus, hvis det er muligt.
› vægten -10 hvilket tolkes som en anmodning til et trafiksignalanlæg om at
give rødt til en for tidlig bus, hvis det er muligt.
Hos Center for trafik omprogrammeres den dedikerede tjeneste til et egentligt prio-
riteringssystem med mange ind- og udgange af prioriteter. Her implementeres et
uafhængig filtrering og egenvægtning af de modtagne anmodninger om prioritet,
som modtages.
Filtreringen og egenvægtning kan anvendes til mange formål herunder vigtigst føl-
gende:

28 OPI ITS DYNAMISK BUSPRIORITERING
http://projects.cowiportal.com/ps/A046275/Documents/3 Projekt dokumenter/OPI_ITS_team_6_rapport.docx
› Filtrering af prioritetsønsker, hvor prioritering ikke ønskes videresendt til tra-
fiksignalanlæg af praktiske eller politiske årsager.
› Egenvægtning af prioritetsønsker, hvor prioritering ønskes ændret inden vide-
resendelse til signalanlæg af praktiske eller politiske årsager.
Eksempler er følgende:
› Testsystemet sender et prioritetsønske med vægt 10 for en forsinket bus i et
kryds, hvor der er vejarbejde. Dette kan filtreres fra, således at anmodningen
ikke fremsendes.
› Testsystemet sender et prioritetsønske med vægt 10 for en forsinket bus i et
kryds, hvor der er ofte er kø på den tværgående retning, hvilket kan egenvæg-
tes, således at anmodningen fremsendes med vægten 0.
Således åbner denne test-implementering mulighed for fremtidig udvikling af en
mere avanceret anvendelse af prioritering og filtrering i samarbejde med relevante
parter i trafikken.
For testimplementeringen fokuseres på vægtningsprotokollen til håndtering af Mo-
via busser, hvor implementering af vægtning på Movia’s side kan udføres som en
simpel sammenholdning mellem GPS koordinat og tidsplan, med automatisk efter-
følgende vægt. Teoretisk set kan tidsplansammenligningen for testimplementerin-
gen gennemføres på CFT side, men det vil ikke være ønskeligt og vanskeligt at
drive i produktion i fuld skala.


















![Algoritmer og Datastrukturer 2 Dynamisk Programmering [CLRS 15]](https://img.pdfslide.tips/doc/110x75/56816211550346895dd23c65/algoritmer-og-datastrukturer-2-dynamisk-programmering-clrs-15.jpg)










