Embed Size (px)
Citation preview

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 2 &
Aperçu du fonctionnement d’une approche cadencée par le temps
Illustration de la programmation & exemple applicatifs
Extension pour adresser d’autres domaines applicatifs (contrôle moteur)
Cadencé par des évènements extérieurs temporellement maîtrisés
Aperçu d’une extension au distribué (topologie bus)
Plan

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 3 &
Modèle de programmation : YC Expression du parallélisme (définition des agents)
Expression de contraintes temporelles
Expression des communications
Modèle d’exécution (multitâche communiquant) Cadencé par le temps réel, multi-échelle
Cadencements déduits d’après les contraintes de temps exprimées et les communications
Outils support permettant … … la génération de code et l’implantation sur cible
… l’aide à l’analyse et la validation (simulation POSIX)
Noyau orienté sûreté de fonctionnement et performance Simple cœur (e.g. 68K, IA32, ARM), multicoeur hétérogène (e.g. S12XE), multicoeur SMP (e.g. IA32), architecture distribuée
Méthode de conception

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 4 &
Le système est cadencé par le temps réel (Time-Triggered) tous les traitements prennent place entre deux instants du système
les exécutions sont asynchrones mais sont synchronisées (synchronisme) au début et à la fin des traitements : isochronisme réel indépendant du matériel
Cela définit une action élémentaire (AE)
tous les transferts de données entre « tâches » ont lieu à la transition entre deux traitements
Multi-échelle de temps
AE
Td Tf
temps physique
Intervalle de temps spécifié
Durée d’exécution effective
… …
Date de début au plus tôt Date de fin au plus tard
Modèle d’exécution

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 5 &
H 1
H 2
p 2
t 0 X( t
0 )=X( déb )
déb fin
H 1
H 2
X p1
p 2
t X( t )=X( )
principe d’observabilité strict
mise à jour implicite et automatique aux rythmes définis
dimensionnement automatique et protection des tampons, optimaux et sûrs
Modèle d’exécution
Cohérence temporelle des échanges encapsulation des données et des traitements (donnée protégée et un seul producteur)
les valeurs des données sur lesquelles travaille une AE sont figées à un instant temporel donné (date de début de l’AE)
Consommation et production de nouvelles données uniquement aux TSPs

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 6 & 6
Determinism property
Data values are independent From the effective execution duration From the scheduling policies (including job preemptions)
Determinism property Dynamic behavior of the system predictable and unvarying (reproducibility) Implementations have identical results (except for the sizing) Test scenarios are predictable and their results reproducible
Fetched
inputs
Tb Te
real time
Same observed
behaviour
outputs
availability
Tb Te
real time
For the same processing
- scheduled differently -Fetched
inputs
Tb Te
real time
Same observed
behaviour
outputs
availability
Tb Te
real time
For the same processing
- scheduled differently -Same observed
behavior
Fetched
inputs
Tb Te
real time
Same observed
behaviour
outputs
availability
Tb Te
real time
For the same processing
- scheduled differently -Fetched
inputs
Tb Te
real time
Same observed
behaviour
outputs
availability
Tb Te
real time
For the same processing
- scheduled differently -Same observed
behavior

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 7 &
Un agent avance dans le temps par sauts successifs le long d’une échelle de temps (horloge de base de la tâche) définie par le concepteur pour chaque agent
Les sauts peuvent être de longueurs différentes (comme ci-dessous 1-3-1-1-3-1-1-…)
Hw
…
clock HBASE= gtc1(0, 1); /* 1 ms */
application demo(inittime= 99) with
HBASE;
agent ag1tst(starttime= 1) with HBASE
{
body start
{
/* proc 1 */ advance(1);
/* proc 2 */ advance(3);
/* proc 3 */ advance(1);
}
}
temps
Initialisation TT :
– La valeur initiale du temps TT de
l’application est elle aussi prédéfinie
par le concepteur
– Chaque tâche démarre à partir d’un
instant spécifié de son horloge de
base après le démarrage TT de
l’application
Graphe de contrôle et d’exécution de
la tâche utilisé par le noyau Chaîne de compilation et de
génération de code
Exemple d’écriture d’un cadencement simple

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 8 &
Les horloges : bases de temps
Hbase (ms)
Hpair
Himpair
clock Hbase = gtc1 (0,1) ;
ou clock Hbase = gtc2 (0,1,0) ;
ou clock Hbase = gtc3 (0,1,0,0) ;
clock Hpair = 2*Hbase ;
clock Himpair = 2*Hbase + 1 ;
0 1 2 3 4 5 6 7 8 9 …
0 1 2 3 4 5 …
1 2 3 4 5 …

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 9 &
Les horloges : démarrage
Hbase (ms)
Hpair
Himpai
r
application monAppli ( inittime = 4 ) with Hbase ;
inittime starttime
(agC)
starttime (agB, agA)
agent agB ( starttime = 4 with Hpair ) with Hbase
{ ... }
agent agC ( starttime = 3 with Himpair ) with Hbase
{ ... }
agent agA ( starttime = 8 ) with Hbase
{ ... /* ensemble de blocs */ ... }
t=4 9 12
0 1 2 3 4

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 10 &
Fenêtres temporelles : advance
agC
starttime (agC)
(rmq : code de l’agent agC exécuté après son démarrage)
body start
{
/* traitement f_a */
advance (1) ;
/* traitement f_b */
advance (4) with Himpair ;
}
t=9
f_a f_b
Hbase (ms)
Himpair
17
…

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 11 &
Fenêtres temporelles : before
Hbase (ms)
agC
starttime (agC)
Code de l’agent agC exécuté après son démarrage : {
/* traitement f_a */
advance (1) ;
/* traitement f_b */
before (2) ;
/* traitement f_c */
advance (4) with Himpair ;
}
t=9
Himpair
f_a f_b f_a f_b
…
…
17

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 12 &
Variables temporelles : définition et droits
/* Blocs chez le propriétaire (agA) */
temporal
{
unsigned long 1$varT=0 ; }
display
{
varT : agB ; }
Hbase (ms)
varT (Hbase)
agA
t=12 15 18 22 23 27
/* Bloc chez un consultant (agB) */ consult
{
agA : 1$varT ; }

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 13 &
Variables temporelles : accès aux valeurs passées (1/2)
/* Code chez le propriétaire (agA) */
{ varT=1; affiche(`0$varT);
advance(3);
++varT; affiche(`0$varT);
advance(2) with Hpair;
++varT; affiche(`0$varT);
advance(2) with Hpair;
++varT; affiche(`0$varT); advance(1);
++varT; affiche(`0$varT);
advance(4); /* ... */ }
Q : dessinez chronogramme
avec ‘temporal with Hpair’ et
le même code YC
Hbase (ms)
agA t=12 15 18 22 23 27
0 0 1 0$varT 2 2 3 4 4 5
‘0’ ‘1’ ‘2’ ‘3’ ‘4’ ‘5’
0 1 1 2 2 4 4 5

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 14 &
Variables temporelles : accès aux valeurs passées (2/2)
/* Code chez le consultant (agB) */
{ affiche(agA`0$varT);
advance(1) with Hpair ;
}
Q : redessinez ce chronogramme
lorsque agB consulte les deux
dernières valeurs passées de
varT
agB t=12 14
‘0’ ‘0’ ‘1
’
‘2’ ‘2’ ‘3’ ‘4’ ‘4’
Hbase (ms)
0 0 1 0$varT 2 2 3 4 4 5 0 1 1 2 2 4 4 5

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 15 &
Variables temporelles : réponse
/* Code chez le propriétaire (agA) */
{ varT=1; affiche(`0$varT);
advance(3);
++varT; affiche(`0$varT);
advance(2) with Hpair;
++varT; affiche(`0$varT);
advance(2) with Hpair;
++varT; affiche(`0$varT); advance(1);
++varT; affiche(`0$varT);
advance(4); /* ... */ }
Hbase (ms)
varT (Hpair)
agA t=12 15 18 22 23 27
0 0 1 0$varT 2 2 3 4 4 5
‘0’ ‘0’ ‘2’ ‘3’ ‘3’ ‘4’

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 16 &
Variables temporelles : réponse
/* Code chez le consultant (agB) */
{ affiche(agA`0$varT);
advance(1) with Hpair ;
}
Hbase (ms)
varT (Hpair)
agB t=12 14
0 0 1 agA`0$varT 2 2 3 4 4 5
‘0’ ‘0’ ‘1
’
‘2’ ‘2’ ‘3’ ‘4’ ‘4’

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 17 &
Construction simple d’une « synchronisation multi-échelle »
AgDemo
(MS)
Horloge HB=5*MS
Inittime
1000s Lecture des données d’un coupleur toutes les 5 ms
AgDemo
(MS)
Horloge HB=5*MS
Inittime
1000s Lecture des données d’un coupleur toutes les 5 ms
Déclaration de plusieurs
horloges (échelles de temps) :
1ms et 5 ms
Contrainte temporelle d’un tick
de l’horloge à 1ms Resynchronisation au prochain tick de l’horloge à
5ms quelque soit le nombre de tours de boucle

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 18 &
Affichage d’un tiret toute les secondes avec une maîtrise de la gigue Par construction le cadencement temporel implémenté garantit une gigue entre deux occurrences d’affichage de [750;1250ms] (si système ordonnançable)
HSEC
HJIT
Agent test
JIT_in_ms
#define SEC_in_ms 1000
#define JIT_in_ms 250
clock MS= gtc1(0,1); /* 1ms */
clock HSEC= SEC_in_ms*MS;
clock HJIT= SEC_in_ms*MS + JIT_in_ms;
application dash(inittime= 10) with HSEC;
agent test(starttime= 1) with HSEC {
body start {
edit("-"); advance(1) with HJIT;
advance(1);
}
}
Paramètre du
comportement temporel
Déclaration des horloges
Maîtrise de la gigue
Gigue min Gigue max
Exemple simple de gestion de la gigue

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 19 &
Un système contient toujours des défauts résiduels
Principe de déterminisme fort dans OASIS
Confiner les anomalies et maîtriser leurs conséquences pour conserver la propriété de déterminisme même en cas d’anomalies
il faut détecter à l’exécution toutes les tentatives de violation de la séparation des tâches
contrôler le dimensionnement des ressources d’exécution (tampons, quotas CPU, etc.)
contrôler l’enchaînement séquentiel des actions, etc.
Partitionnement spatial et temporel au sein d’OASIS
Unité d’exécution et de confinement d’anomalie : l’agent
Isolation spatiale (illustré sur le transparent suivant) entre les différents agents
entre les différentes parties du noyau
entre le noyau et les agents
Isolation temporelle Surveillance des budgets (WCET) associés aux actions élémentaires (AE) : ségrégation de la
défaillance au sein de la tâche et maintien de disponibilité du système Impact limité à l’agent, possibilité de définir une stratégie d’exécution en mode dégradé
Surveillance des échéances des AE : détection d’une erreur de dimensionnement
Anomalies, déterminisme et modularité

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 20 &
Pré-requis : disponibilité de timers Pour représenter l’évolution du temps, l’échéance de la tâche en cours et son budget temps
Plusieurs variantes d’implémentation possibles (2/3 timers, valeur de comparaison par rapport à la valeur du compteur, etc.)
Granularité d’un timer peut être abitraire et dépend du nombre de bits du compteur (16, 32 ou 64 bits)
Impact sur la précision
Implémentation du modèle TT
job Td
Tf
Temps
Budget de temps (WCET)
Préambule (système)
Consultation des données visibles
Production des données visibles
Postambule (système)
Interruption timer
Scheduler (micronoyau)
Uniquement si la tâche dépasse son WCET

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 21 &
Organisation défensive des programmes exécutables
trap
move sr
horloge
Mode d’exécution
utilisateur
Mode d’exécution
privilégié
Code et données
d’une tâche
Code et données
d’une tâche
Prolongement du
contexte d’une
tâche dans la
couche système
Prolongement du
contexte d’une
tâche dans la
couche système
Code de la couche système
Données et code du micro-noyau (gestion de l’allocation du processeur aux tâches et gestion du temps)
Code générique
(Noyau)
Codes et données
applicatifs
…
Données relatives
d’une application
(runtime)
contextes d’exécution distincts hors de CS et différents internes à CS, contexte mN indépendant segmentation particulière des exécutables et des données
conception orienté sûreté et exploitation spécifique des mécanismes de protection liés au H/W contrôle de conformité de l’exécution de chaque tâche contrôle toutes les hypothèses de dimensionnement (quotas, tampons, etc.) les préemptions de tâches sont toutes contrôlées par le mNoyau atomique CS 100% préemptible

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 22 &
Partitionnement spatial
MICRO-NOYAU
COUCHE SYSTEME
AGENT ACTIF AUTRES AGENTS
Droits d’accès mémoire RAM
Lecture/écriture
Lecture uniquement
Aucun droit
Contexte tâche
applicatif
MICRO-NOYAU
COUCHE SYSTEME
AGENT ACTIF
AUTRES AGENTS
Micro-noyau
Td
Interruption timer
MICRO-NOYAU
COUCHE SYSTEME
AGENT AUTRES AGENTS
Couche système
Tâche
Préambule
Job
Postambule
Contexte couche
système
Contexte
micro-noyau
…
Tf

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 23 &
Bénéfices
Portabilité Composabilité
Déterminisme Différence avec les pratiques
courantes

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 24 &
OASIS and the QDS plaform
Industrial success in the nuclear industry with AREVA NP (2003-2006)
The Qualified Display System platform (compliant to requirements of safety classified system of category A, IEC 61513 & 60880) Part of 1E safety-classified I&C system of the EPR (European pressurized reactor) Single processor IA32 architecture
QDS: display equipment with high dependability level for safety classified application
Based on the OASIS system software and off the shelf hardware components
Application: post-accident monitoring & control / supervision of the NPP starting phase and monitoring when operational
full control of a graphical HMI (10 images per second, 1024x768x16bpp)
data storage (24h) and calculations for 20 million measure points
network communication management (about 50000 data per second)
application downloading and monitoring
all hardware component configurations performed & checked
self-tests in regular time

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 25 &
netSUAg
updAg
appliNAg
selfTestAg
netAg
HMIdisAgHMImkAg
statMemAg
ALLDATA
DATAtoTXS
NET_SELFTEST
DATAfromTXS
ACTION
DISPLAYDATA COMMAND
MO_POSITION
ECHOES HMItouchAg
STRESULTS
MK_SELFTEST TS_SELFTEST
SM_SELFTEST
SU_REQ
SU_BUF
HC_BLOCK
static
memory
mouse
keyboard touchscreen
TXS
network
SU
network
graphic
card LFB
OASIS
Safety-oriented
Kernel
ST_STORAGE
MT_STORAGE
STATUS
TS_POSITION
ECHO

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 26 &
QDS: example of Real-Time behaviors
n e tS U A g
H M Ito u c h A g
s e lfT e s tA g
u p d A g
H M Id is A g
a p p li1 A g
1 0 m s
1 0 m s
1 s
2 0 m s
1 0 0 m s
2 0 m s
n e tA g
1 0 m s
H M Im k A g
5 m s
s ta tM e m A g
1 s
n e tS U A g
H M Ito u c h A g
s e lfT e s tA g
u p d A g
H M Id is A g
a p p li1 A g
1 0 m s
1 0 m s
1 s
2 0 m s
1 0 0 m s
2 0 m s
n e tA g
1 0 m s
H M Im k A g
5 m s
s ta tM e m A g
1 s

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 27 &
Medium voltage protection relays Safety-function of the software part of protection relays
Detects and isolates fault in the electrical network Sepam line of products within Schneider Electric
Requirements for SIL2 or higher certification (IEC 61508)
Demonstration of the fulfillment of the detection delay (tdetection) End-to-end temporal constraint between the detection of power
faults and asking the tripping of circuit breakers tdetection <= 26,640 ms
Current practice: costly phase of tests and high margins are taken on the temporal behaviour of the software part of protection relays
Circuit breaker closed
Default
Circuit breaker opened
Sensor
Sensor: transmits information
current/voltage
Relay: digitalizes the information and
takes decisions according to user
settings

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 28 &
Software architecture of OASISepam: a simplified Sepam 10 protection relay
AgMoy AgARGA
Simulated
electrical network
AgTRS
AgCrete
Ag50
Ag51
Activate
protections
1$
3$
1$
1$
1$
555usec
(1 samping)
3 samplings (1665µsec)
1 sampling
Acquisition Measurement Protections
12 samplings 12 samplings
12 samplings
12$
1$
Database of
tests
AgCumulRMS AgRMS
1800 samplings
1 sampling
1$

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 29 &
Mastered temporal behavior within OASISepam
Worst-case tdetection = 26,64 ms
Failure observed at AgMoy level (tAgMoy_taken): 3 * 0,555 ms
Failure observed at AgTRS level (tAgTRS_taken): + 6,66 * 3 ms
Failure observed at Protection level (tProtections_taken): + 6,66 - 3*0,555 ms
…
…
Ag_TRS
Protections
Cycle 1 Cycle 2
tdeb
tfailure = tdeb + ε
Power failure detection time: tdetect_failure
tAg_TRS_taken
tProtections_taken
… Ag_Moy
… Ag_ARGA
555µsec
3 * 555µsec tAg_ARGA_taken
tAg_Moy_taken
3 * 555µsec
6,66ms

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 30 &
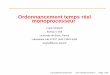
Domain field: automotive powertrain
Move from single core to multi-core architectures in order to be compliant with next « euro » emission norms
Upcoming safety standard (ISO 26262) requires an increase in the confidence of the temporal behavior
Advanced features of PharOS: context

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 31 &
Powertrain Usecase
31
0
30
60
90
TDC
90°
45°
180°
135°
0°
Injection cycle
Pulses before optional
Pulses after optional
Pulses around mandatory
Injection pulse management
Pulse HW configuration
Execution window
Start of
physical injection
Static angle
Dynamic angle
SW processing

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 32 &
Classical Time-Triggered (TT) paradigm [Giotto, etc.]
Specify task activation and deadlines using physical time
Abstract the underlying architecture
BUT inappropriate for interacting with the external world
Inefficiency of the looping approach
Express timing constraints in another temporal reference than physical time
Advanced features of PharOS: problems

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 33 &
• Address sporadic interactions
– Specify job release/deadline independently of the exact timing occurrence of events
– Min. and max. inter-arrival time for: 1) system liveness and 2) schedulability demonstration
• Specificy timing constraints using an application specific temporal reference
– Given for a set of range of values of an application-level variable
– For example: [1000 – 3000 rpm] and [3000 – 5000 rpm]
Generalized TT paradigm: eXternal-Triggered (xT)
Job Temporal
reference
…
Tick #0 Tick #3
Expected inter-arrival interval

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 34 &
Executed at each occurrence of an xT tick
To implement a specific protocol (receive/send)
To give a semantic to xT ticks
What is the number of a tick ?
Should the tick be filtered?
Initialization sequence (identification of the tooth number)
Intermediate event for communicating through a peripheral
Application-level filtering function

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 35 &
Extension à des bus de communication
Continuité et intégration avec le modèle OASIS intègre déjà de manière réaliste les contraintes temporelles
délais de communication jamais estimés comme nuls
diffusion avant l’échéance, approvisionnement après l’échéance
couches systèmes et matérielles transparentes pour le développeur
application conçue indépendamment de l’architecture
Interface TDMA avec Ethernet standard (physical layer) aucune collision par construction (une collision devient une erreur)
garantir par construction la ponctualité des communications
dimensionnement et ordonnancement statique du réseau
pour vérifier et valider le réseau hors-ligne
pour détecter un comportement fautif
=> Cadencement global des communications connu de tous

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 36 &
Concept de l’extension du modèle d’exécution
Network window
Agent 1
Agent 2
Pilot
Network
r
Network deadline
s
Pilot
t
L'échéance réseau
Prise en compte des délais de transmission
Surcontraindre l’échéance d’un traitement
Libération d’une fenêtre de transmission des données

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 37 &
Exemple de conception d’un agent de contrôle-commande
Syntaxe YC
Annexe A

Cliquez pour modifier le style du titre
DACLE Division| Sept. 2015 © CEA. All rights reserved | 38 &
Agent communicant & avec plusieurs échelles de temps
MS …
MS … T1
T2
communications communications
Q : écrivez le code YC d’un agent qui
structurerait ce comportement temporel