Embed Size (px)
DESCRIPTION
STUFF
Citation preview
PROIECTAREA COMPUTERIZATĂ A TRANSMISIILOR PLANETARE PRECESIONALE
BOSTAN Ion, DULGHERU Valeriu, SOCHIREAN Anatol
Universitatea Tehnică a Moldovei Rezumat: Conceptul de organizare a producerii prin integrarea calculatorului (CIM – Computer Integrated Manufacturing) a fost motivat de doi factori principali: creşterea productivităţii, pe de o parte, şi optimizarea capacităţii sistemului de a produce o gamă mai largă de tipuri de produse industriale, pe de altă parte. Pentru realizarea producerii asistate de calculator, în procesul de proiectare a transmisiei planetare precesionale a fost utilizată funcţia CAD cu produse software de nivel mediu Autodesk Inventor şi Solid Works, care se integrează în funcţiile nominalizate mai sus. 1. Generalit ăţi
Întreprinderile moderne utilizează tot mai frecvent conceptul de organizare a producerii prin integrarea calculatorului (CIM – Computer Integrated Manufacturing). Acest concept a fost motivat de doi factori principali: creşterea productivităţii, pe de o parte, şi optimizarea capacităţii sistemului de a produce o gamă mai largă de tipuri de produse industriale, pe de altă parte. Aceste două motivaţii cu timpul au generat, însă, unele tendinţe cu impact negativ, impunându-se soluţionarea corectă a situaţiei: atunci când creşte flexibilitatea, scade productivitatea. De aceea, concilierea între cele două tendinţe din punct de vedere economic a devenit o preocupare permanentă a specialiştilor din domeniu.
Una dintre funcţiile conceptului CIM este proiectarea constructivă asistată de calculator (CAD – Computer Aided Design), care îmbină posibilitatea de elaborare a modelelor virtuale 3D ale pieselor cu posibilitatea de parametrizare a lor. Parametrizarea pieselor constă în atribuirea modelului a unor proprietăţi, cum ar fi: forma geometrică definită a piesei, volumul şi masa piesei, coordonatele centrului maselor, caracteristicile inerţiale, proprietăţile fizico-mecanice ale materialului utilizat etc.
O altă funcţie a conceptului CIM constă în proiectarea tehnologică asistată de calculator (CAE – Computer Aided Engineering), prin care pot fi utilizate modelele CAD ale mecanismelor cu aplicarea calculelor inginereşti (cinetostatice, de rezistenţă etc.), cu posibilitatea optimizării rapide a construcţiilor mecanismelor, luând în consideraţie factorii reali de influenţă.
În spectrul larg al posibilităţilor proiectării CAD, conceptul CIM conţine şi funcţia de fabricaţie asistată de calculator (CAM – Computer Aided Manufacturing), care asigură ajustarea proceselor tehnologice şi a programelor de prelucrare mecanică pe maşini unelte cu comandă numerică CNC.
În şirul posibilităţilor se înscrie şi funcţia de asigurare a calităţii asistate de calculator (CAQ – Computer Aided Quality) a produselor fabricate, care permite controlul asistat de calculator pe maşini de măsurat în coordonate prin compararea modelului real al produsului cu modelul lui matematic. Pentru realizarea producerii asistate de calculator, în procesul de proiectare a transmisiei planetare precesionale a fost utilizată funcţia CAD cu produse software de nivel mediu Autodesk Inventor şi Solid Works, care se integrează în funcţiile nominalizate mai sus. 2. Particularit ăţile constructiv-cinematice ale transmisiei planetar e precesionale reflectate în modelul CAD
La proiectarea asistată de calculator a transmisiilor planetare precesionale trebuiesc luate în calcul
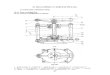
particularităţile constructiv-cinematice care le deosebesc de cele clasice. Pentru transmisia precesională 2K–H, prezentată în fig. 1, menţionăm următoarele particularităţi:
1. Angrenajul precesional este constituit din satelitul 2 cu două coroane laterale de bolţuri conice 6 şi 7, care efectuează mişcare sfero-spaţială cu un punct fix între două roţi centrale – imobilă 3 şi mobilă 4.
2. Satelitul 2 este instalat pe porţiunea înclinată a arborelui manivelă 1, sub unghiul de nutaţie θ. 3. Prelungirile generatoarelor bolţurilor conice 6 şi 7 şi a dinţilor roţilor centrale 3 şi 4 se intersectează
într-un punct (centrul de precesie) plasat pe axa porţiunii înclinate a arborelui-manivelă 1. 4. Axele bolţurilor conice ale fiecărei coroane 6 şi 7 ale satelitului 2 sunt plasate pe suprafaţa unei
axoide conice cu unghiul la vârf de 2δ, iar vârfurile acestora se suprapun în centrul de precesie.
5. Profilul dinţilor roţilor centrale este convex-concav, descris prin ecuaţiile parametrice prezentate în [1], şi variabil, dependent de parametrii geometrici ai angrenajului θ, δ, β, de numărul de dinţi ai roţii centrale Z3(4) şi coraportul dintre numărul de dinţi ai roţilor conjugate 3( 4 ) 6( 7 )Z Z 1= ± .
6. Multiplicitatea angrenajului este de ε=100% perechi de dinţi conjugaţi, dar poate fi şi ε<100%. 7. Coroanele satelitului, de asemenea, pot fi în formă de danturi cu profilul dinţilor în arc de cerc. Transmisia planetară precesională în configuraţia prezentată în fig. 3.1 asigură rapoarte de
transmitere de la ±10 până la ±3600 într-o treaptă, iar cu structuri cinematice speciale – până la 14 mln. Din perspectiva proiectării computerizate este important de menţionat că una şi aceeaşi configuraţie constructivă a transmisiei planetare precesionale asigură un diapazon foarte larg al rapoartelor de transmitere eventual solicitate de consumatori, fapt ce facilitează atât procesul de proiectare, cât şi procesele de fabricare şi control dimensional al acestora. Transmisia planetară precesională 2K–H după posibilităţile sale cinematice nu are analogi printre transmisiile cunoscute în lume. În transmisiile clasice cu rapoarte de transmitere mari, în angrenaje apar sarcini mărite pe dinţi, în transmisia planetară precesională, însă, datorită multiplicităţii absolute (ε=100%) a angrenării, sarcina se distribuie între un număr mare de perechi de dinţi. În transmisia planetară precesională 2K–H (fig. 1) arborele-manivelă 1 cu partea înclinată transformă mişcarea de rotaţie în mişcare sfero-spaţială a blocului-satelit 2 care, prin coroanele danturate cu role, interacţionează cu roata dinţată fixă 3 şi, respectiv, cu roata dinţată mobilă 4. La transmiterea mişcării şi sarcinii, sensul rotirii arborelui condus 5 poate coincide sau poate să nu coincidă cu direcţia arborelui de intrare sau nu. Raportul de transmitere al
transmisiei planetare precesionale se calculează conform relaţiei:
6 4
3 7 6 4
Z Zi ,
Z Z Z Z= −
− (1)
unde: Z6, Z7 sunt numerele de dinţi ale coroanelor satelitului; Z3, Z4 reprezintă numărul de dinţi ai roţilor dinţate centrale. Realizarea rapoartelor de transmitere mari conduce la sporirea sarcinilor statice în practic toate cuplele cinematice şi sprijinele, cu excepţia angrenajului multipar (în contactul dinţilor concomitent angrenaţi). Totodată, mişcarea sfero-spaţială a satelitului suplimentează sarcina în cuplele
cinematice cu componenta dinamică apreciată în calculele de rezistenţă a angrenajului cu coeficientul KHV. 3. Elaborarea modelului 3D al transmisiei planetare precesionale Proiectarea computerizată a transmisiilor planetare precesionale a fost efectuată cu produsul software Autodesk Inventor. La elaborarea modelului 3D al transmisiei planetare precesionale s-a ţinut cont de particularităţile constructiv-cinematice şi funcţionale ale acesteia. Luând în calcul specificul constructiv şi al transformării mişcării şi sarcinii în transmisia planetară precesională, precum şi particularităţile angrenajului cu profiluri nestandarde ale dinţilor, pentru fabricarea cărora sunt necesare tehnologii principial noi de generare, au fost identificate obiectivele de bază ale utilizării modelului 3D în cercetare – proiectare – fabricare – control dimensional, printre care: 1. Proiectarea CAD a transmisiilor:
a) elaborarea documentaţiei tehnice cu desene de ansamblu şi de execuţie a modelelor 3D, însoţite de analiza lanţurilor dimensionale; b) Utilizarea produselor PDM (Product Data Management) în scopul organizării proiectării în echipă cu separarea funcţiilor fiecărui proiectant.
În proiectare au fost utilizate produsele software: Autodesk Inventor, Solid Works, CATIA, NX (Unigraphics), Autodesk Vault, Solid Works Entreprise PDM etc. 2. Analiza cinetostatică cu studiul şi aprecierea următoarelor efecte din angrenajul precesional:
a) multiplicitatea angrenării dinţilor, vitezele, acceleraţiile, forţele de alunecare şi rostogolire a profilurilor; b) presiunea de contact şi neuniformitatea repartizării sarcinii între dinţi şi pe lungimea lor; c) studiul şi determinarea reacţiunilor sumare (statice şi dinamice) în sprijine (rulmenţi), în contactul dinţilor concomitent angrenaţi şi în alte cuple cinematice; d) determinarea coeficienţilor dinamicităţii sarcinii Khv şi neuniformităţii repartizării sarcinii pe lungimea dinţilor Khp, utilizaţi în calculul de rezistenţă al angrenajului la presiunea de contact.
Fig. 1. Schema constructivă a transmisiei planetare
precesionale 2K–H.
În aceste scopuri au fost utilizate programele: Adams, MSC Visual Nastran, Motion Inventor, Cosmos Motion, Cosmos Works, ANSYS etc.
3. Elaborarea în baza teoriei de generare a danturilor cu sculă cu mişcare sfero-spaţială (descrisă în [1]) a următoarelor tehnologii:
a) tehnologia de generare a danturilor cu profil convex-concav şi variabil al dinţilor cu sculă în formă de trunchi de con; b) tehnologia de creare a danturilor cu profil în arc de cerc (inclusiv a profilurilor-oglindă) cu sculă în formă de trunchi de con; c) tehnologia de generare a danturilor cu profil convex-concav şi variabil cu sculă în formă de disc; d) tehnologia de generare a danturilor cu profil convex-concav şi variabil cu sculă în formă de cilindru pe maşini-unelte cu 3 grade de mobilitate; e) tehnologia de generare a danturilor cu profiluri convex-concave şi cicloidal variabile pe maşini-unelte cu 5 grade de mobilitate.
La elaborarea tehnologiilor de generare au fost utilizate programele: Solid CAM, MasterCAM, DelCAM, EdgeCAM etc.
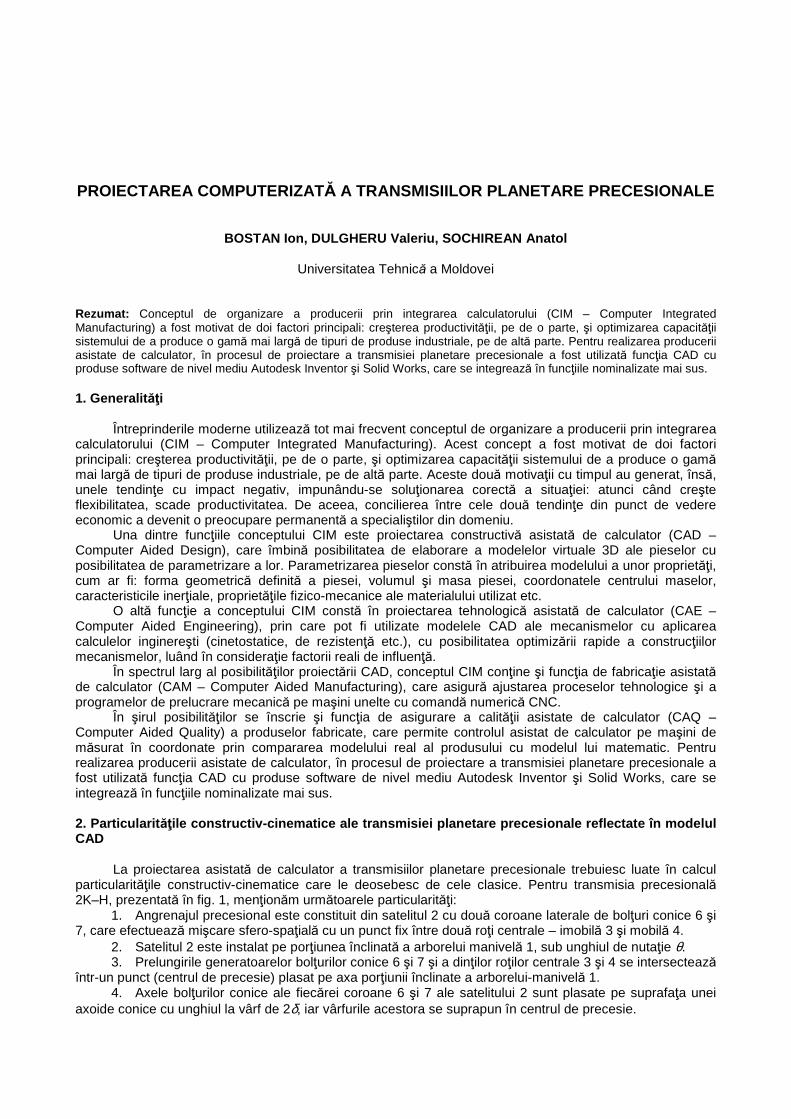
4. Determinarea erorilor de execuţie a pieselor fabricate cu utilizarea maşinilor de măsurat în coordonate prin compararea modelelor lor fizice cu cele matematice. Au fost utilizate programele: FARO, Geomagic etc. Ţinând cont de specificul şi complexitatea geometriei angrenajului precesional cu mişcare sfero-spaţială a satelitului în jurul unui punct fix, iniţial a fost elaborată schema parametrizată 2D a transmisiei 2K–
H (fig. 2), ţinând cont de particularităţile constructi-ve ale transmisiilor planetare precesionale descrise mai sus. La elaborarea schemei parametrizate 2D a TPP trebuie respectată în special coincidenţa cu centrul de precesie O, plasat pe axa manivelei arborelui de intrare 1 (fig. 2), a punctului de intersecţie a vârfului axoidei conice de plasare a rolelor 3 şi 7, a prelungirilor generatoarelor rolelor conice 3, 7 şi generatoarelor profilurilor dinţilor roţilor centrale 3 şi 4. Scopul primei etape de elaborare a schemei parametrizate 2D este de a asigura posibilitatea modificării rapide a
modelelor pieselor componente ale transmisiei în procesul de proiectare. Spre exemplu, la modificarea dimensiunii unui rulment urmează automat modificarea dimensiunilor modelelor pieselor cuplate cu rulmentul respectiv (bloc-satelit, arbore-manivelă), fără intervenţii suplimentare de modificare al acestora. Acest fapt contribuie la reducerea erorilor în cotele de dimensionare a pieselor şi la asamblarea corectă a pieselor reale. Utilizând cotele de referinţă din schema parametrizată 2D, mai întâi sunt elaborate (în baza funcţiei Derived component) modelele tuturor pieselor participante la transformarea şi transmiterea mişcării de rotaţie şi a sarcinii, şi anume:
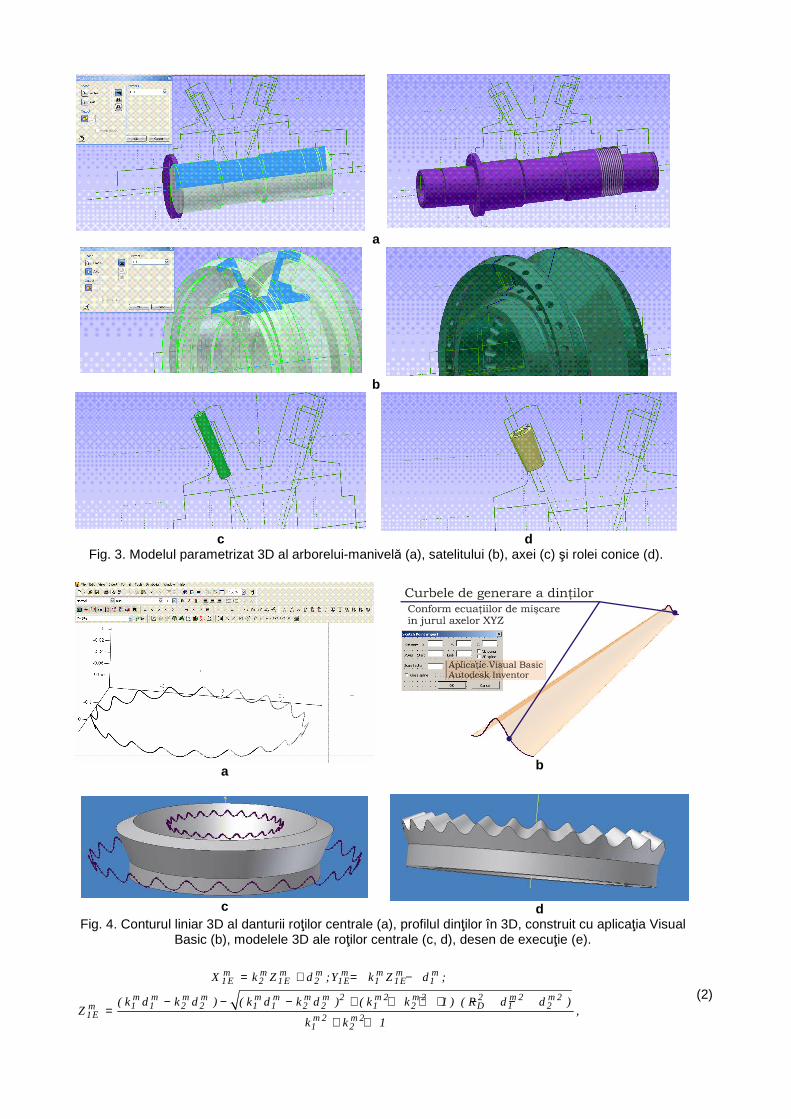
- al arborelui-manivelă (fig. 3 a); - al blocului-satelit (fig. 3 b); - al cuplelor cinematice ax–rolă conică (fig. 3 c, d); - al danturii roţilor centrale cu profil convex-concav al dinţilor (fig. 4 a - e).
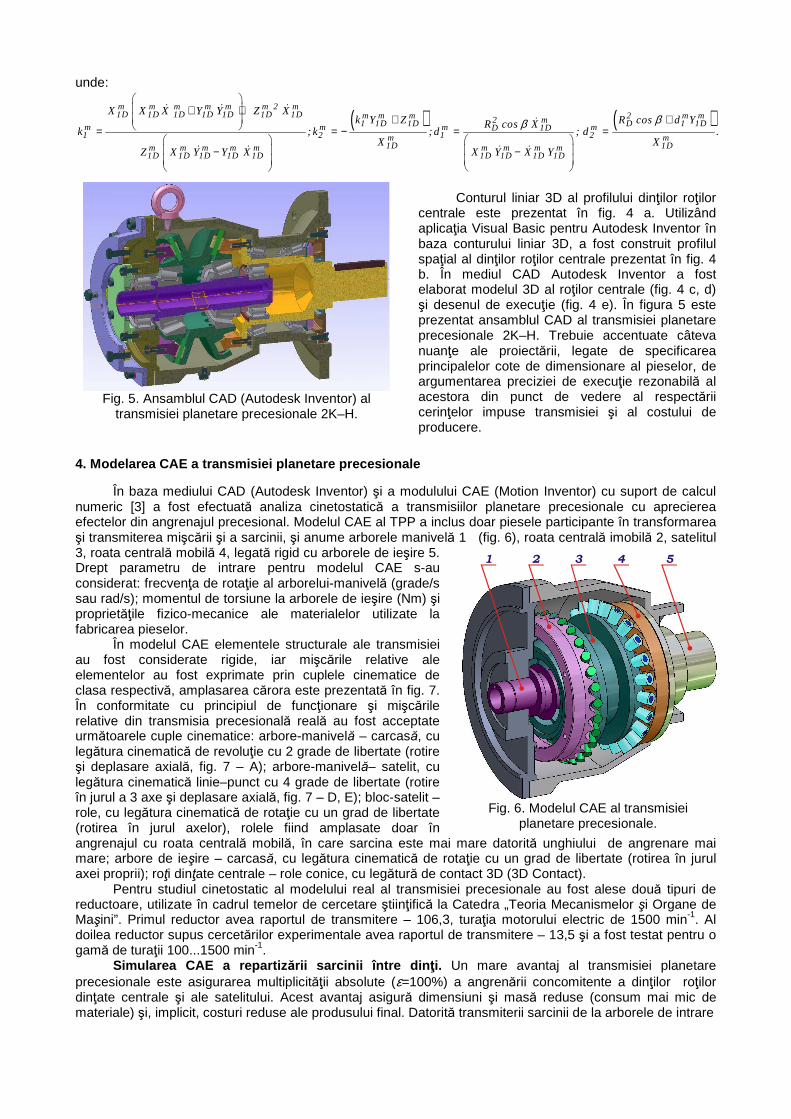
Modelul 3D al roţilor centrale din transmisia planetară precesională este mult mai complicat prin importanţa lor funcţională şi complexitatea constructivă a acestora. Modelul parametrizat 3D a roţilor centrale include atât configuraţia corpului roţii, cât şi forma geometrică a danturii cu dinţi cu profil convex-concav, descrişi cu ecuaţiile parametrice prezentate în [1].
Suprafaţa de lucru a danturii roţii centrale se descrie cu următoarele ecuaţii parametrice:
Fig. 2. Schema parametrizată 2D a transmisiei planetare precesionale 2K–H.
a
b
c d
Fig. 3. Modelul parametrizat 3D al arborelui-manivelă (a), satelitului (b), axei (c) şi rolei conice (d).
a
b
c
d
Fig. 4. Conturul liniar 3D al danturii roţilor centrale (a), profilul dinţilor în 3D, construit cu aplicaţia Visual Basic (b), modelele 3D ale roţilor centrale (c, d), desen de execuţie (e).
m m m m m m m m1 E 2 1 E 2 1E 1 1E 1
m m m m m m m m 2 m 2 m 2 2 m 2 m 21 1 2 2 1 1 2 2 1 2 D 1 2m
1E m 2 m 21 2
X k Z d ;Y k Z d ;
( k d k d ) ( k d k d ) ( k k 1 ) ( R d d )Z ,
k k 1
= + = −
− − − + + + ⋅ − −=
+ +
(2)
unde:
( ) ( )
m m m m m m 2 m 1D 1D 1D 1D 1D 1D 1D m m m 2 m m2 m1 1D 1D D 1 1Dm m m mD 1D1 2 1 2m m
1D 1Dm m m m m m m m m1D 1D 1D 1D 1D 1D 1D 1D 1D
X X X Y Y Z Xk Y Z R cos d YR cos X
k ; k ; d ; d .X X
Z X Y Y X X Y X Y
ββ
+ + + + = = − = =
− −
& & &
&
& & & &
Conturul liniar 3D al profilului dinţilor roţilor
centrale este prezentat în fig. 4 a. Utilizând aplicaţia Visual Basic pentru Autodesk Inventor în baza conturului liniar 3D, a fost construit profilul spaţial al dinţilor roţilor centrale prezentat în fig. 4 b. În mediul CAD Autodesk Inventor a fost elaborat modelul 3D al roţilor centrale (fig. 4 c, d) şi desenul de execuţie (fig. 4 e). În figura 5 este prezentat ansamblul CAD al transmisiei planetare precesionale 2K–H. Trebuie accentuate câteva nuanţe ale proiectării, legate de specificarea principalelor cote de dimensionare al pieselor, de argumentarea preciziei de execuţie rezonabilă al acestora din punct de vedere al respectării cerinţelor impuse transmisiei şi al costului de producere.
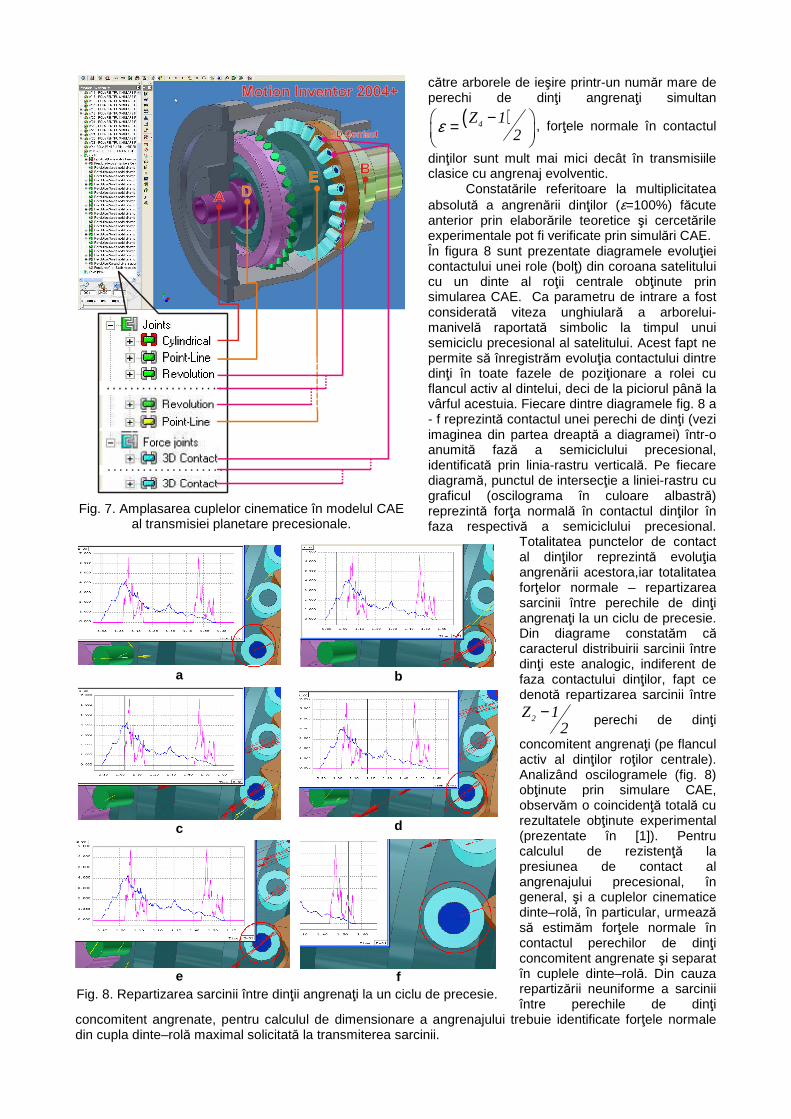
4. Modelarea CAE a transmisiei planetare precesionale În baza mediului CAD (Autodesk Inventor) şi a modulului CAE (Motion Inventor) cu suport de calcul numeric [3] a fost efectuată analiza cinetostatică a transmisiilor planetare precesionale cu aprecierea efectelor din angrenajul precesional. Modelul CAE al TPP a inclus doar piesele participante în transformarea şi transmiterea mişcării şi a sarcinii, şi anume arborele manivelă 1 (fig. 6), roata centrală imobilă 2, satelitul 3, roata centrală mobilă 4, legată rigid cu arborele de ieşire 5. Drept parametru de intrare pentru modelul CAE s-au considerat: frecvenţa de rotaţie al arborelui-manivelă (grade/s sau rad/s); momentul de torsiune la arborele de ieşire (Nm) şi proprietăţile fizico-mecanice ale materialelor utilizate la fabricarea pieselor. În modelul CAE elementele structurale ale transmisiei au fost considerate rigide, iar mişcările relative ale elementelor au fost exprimate prin cuplele cinematice de clasa respectivă, amplasarea cărora este prezentată în fig. 7. În conformitate cu principiul de funcţionare şi mişcările relative din transmisia precesională reală au fost acceptate următoarele cuple cinematice: arbore-manivelă – carcasă, cu legătura cinematică de revoluţie cu 2 grade de libertate (rotire şi deplasare axială, fig. 7 – A); arbore-manivelă– satelit, cu legătura cinematică linie–punct cu 4 grade de libertate (rotire în jurul a 3 axe şi deplasare axială, fig. 7 – D, E); bloc-satelit – role, cu legătura cinematică de rotaţie cu un grad de libertate (rotirea în jurul axelor), rolele fiind amplasate doar în angrenajul cu roata centrală mobilă, în care sarcina este mai mare datorită unghiului de angrenare mai mare; arbore de ieşire – carcasă, cu legătura cinematică de rotaţie cu un grad de libertate (rotirea în jurul axei proprii); roţi dinţate centrale – role conice, cu legătură de contact 3D (3D Contact). Pentru studiul cinetostatic al modelului real al transmisiei precesionale au fost alese două tipuri de reductoare, utilizate în cadrul temelor de cercetare ştiinţifică la Catedra „Teoria Mecanismelor şi Organe de Maşini”. Primul reductor avea raportul de transmitere – 106,3, turaţia motorului electric de 1500 min-1. Al doilea reductor supus cercetărilor experimentale avea raportul de transmitere – 13,5 şi a fost testat pentru o gamă de turaţii 100...1500 min-1. Simularea CAE a repartiz ării sarcinii între din ţi. Un mare avantaj al transmisiei planetare precesionale este asigurarea multiplicităţii absolute (ε=100%) a angrenării concomitente a dinţilor roţilor dinţate centrale şi ale satelitului. Acest avantaj asigură dimensiuni şi masă reduse (consum mai mic de materiale) şi, implicit, costuri reduse ale produsului final. Datorită transmiterii sarcinii de la arborele de intrare
Fig. 5. Ansamblul CAD (Autodesk Inventor) al
transmisiei planetare precesionale 2K–H.
Fig. 6. Modelul CAE al transmisiei
planetare precesionale.
către arborele de ieşire printr-un număr mare de perechi de dinţi angrenaţi simultan
( )4Z 12ε − =
, forţele normale în contactul
dinţilor sunt mult mai mici decât în transmisiile clasice cu angrenaj evolventic.
Constatările referitoare la multiplicitatea absolută a angrenării dinţilor (ε=100%) făcute anterior prin elaborările teoretice şi cercetările experimentale pot fi verificate prin simulări CAE. În figura 8 sunt prezentate diagramele evoluţiei contactului unei role (bolţ) din coroana satelitului cu un dinte al roţii centrale obţinute prin simularea CAE. Ca parametru de intrare a fost considerată viteza unghiulară a arborelui-manivelă raportată simbolic la timpul unui semiciclu precesional al satelitului. Acest fapt ne permite să înregistrăm evoluţia contactului dintre dinţi în toate fazele de poziţionare a rolei cu flancul activ al dintelui, deci de la piciorul până la vârful acestuia. Fiecare dintre diagramele fig. 8 a - f reprezintă contactul unei perechi de dinţi (vezi imaginea din partea dreaptă a diagramei) într-o anumită fază a semiciclului precesional, identificată prin linia-rastru verticală. Pe fiecare diagramă, punctul de intersecţie a liniei-rastru cu graficul (oscilograma în culoare albastră) reprezintă forţa normală în contactul dinţilor în faza respectivă a semiciclului precesional.
Totalitatea punctelor de contact al dinţilor reprezintă evoluţia angrenării acestora,iar totalitatea forţelor normale – repartizarea sarcinii între perechile de dinţi angrenaţi la un ciclu de precesie. Din diagrame constatăm că caracterul distribuirii sarcinii între dinţi este analogic, indiferent de faza contactului dinţilor, fapt ce denotă repartizarea sarcinii între
2Z 12
− perechi de dinţi
concomitent angrenaţi (pe flancul activ al dinţilor roţilor centrale). Analizând oscilogramele (fig. 8) obţinute prin simulare CAE, observăm o coincidenţă totală cu rezultatele obţinute experimental (prezentate în [1]). Pentru calculul de rezistenţă la presiunea de contact al angrenajului precesional, în general, şi a cuplelor cinematice dinte–rolă, în particular, urmează să estimăm forţele normale în contactul perechilor de dinţi concomitent angrenate şi separat în cuplele dinte–rolă. Din cauza repartizării neuniforme a sarcinii între perechile de dinţi
concomitent angrenate, pentru calculul de dimensionare a angrenajului trebuie identificate forţele normale din cupla dinte–rolă maximal solicitată la transmiterea sarcinii.
Fig. 7. Amplasarea cuplelor cinematice în modelul CAE al transmisiei planetare precesionale.
a
b
c
d
e
f
Fig. 8. Repartizarea sarcinii între dinţii angrenaţi la un ciclu de precesie.
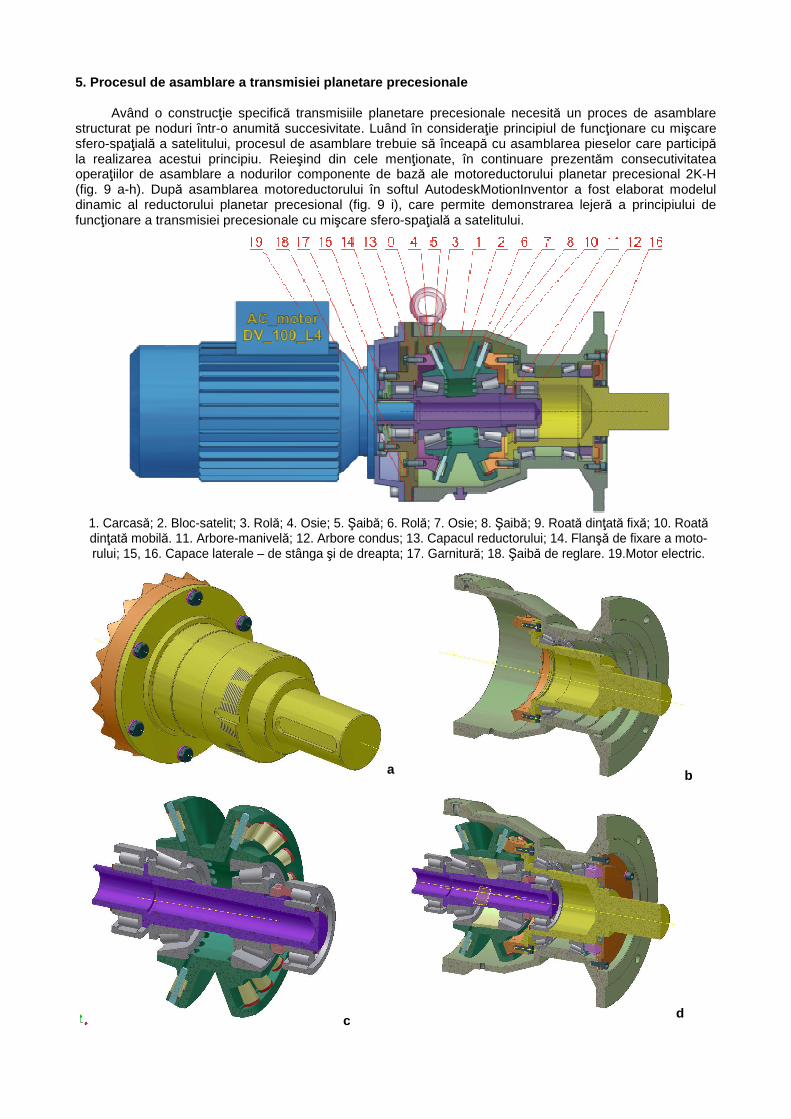
5. Procesul de asamblare a transmisiei planetare pr ecesionale
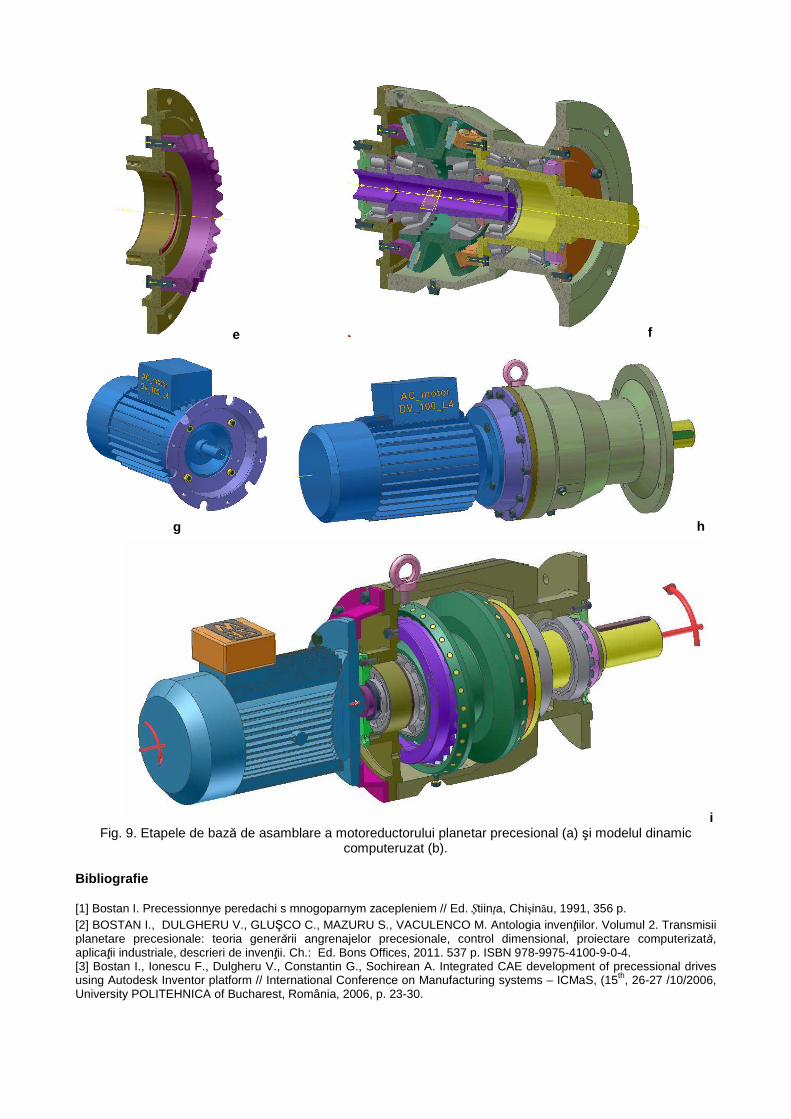
Având o construcţie specifică transmisiile planetare precesionale necesită un proces de asamblare structurat pe noduri într-o anumită succesivitate. Luând în consideraţie principiul de funcţionare cu mişcare sfero-spaţială a satelitului, procesul de asamblare trebuie să înceapă cu asamblarea pieselor care participă la realizarea acestui principiu. Reieşind din cele menţionate, în continuare prezentăm consecutivitatea operaţiilor de asamblare a nodurilor componente de bază ale motoreductorului planetar precesional 2K-H (fig. 9 a-h). După asamblarea motoreductorului în softul AutodeskMotionInventor a fost elaborat modelul dinamic al reductorului planetar precesional (fig. 9 i), care permite demonstrarea lejeră a principiului de funcţionare a transmisiei precesionale cu mişcare sfero-spaţială a satelitului.
1. Carcasă; 2. Bloc-satelit; 3. Rolă; 4. Osie; 5. �aibă; 6. Rolă; 7. Osie; 8. �aibă; 9. Roată dinţată fixă; 10. Roată dinţată mobilă. 11. Arbore-manivelă; 12. Arbore condus; 13. Capacul reductorului; 14. Flanşă de fixare a moto-rului; 15, 16. Capace laterale – de stânga şi de dreapta; 17. Garnitură; 18. �aibă de reglare. 19.Motor electric.
a b
c d
e f
g h
i Fig. 9. Etapele de bază de asamblare a motoreductorului planetar precesional (a) şi modelul dinamic
computeruzat (b). Bibliografie [1] Bostan I. Precessionnye peredachi s mnogoparnym zacepleniem // Ed. Ştiinţa, Chişinău, 1991, 356 p. [2] BOSTAN I., DULGHERU V., GLU�CO C., MAZURU S., VACULENCO M. Antologia invenţiilor. Volumul 2. Transmisii planetare precesionale: teoria generării angrenajelor precesionale, control dimensional, proiectare computerizată, aplicaţii industriale, descrieri de invenţii. Ch.: Ed. Bons Offices, 2011. 537 p. ISBN 978-9975-4100-9-0-4. [3] Bostan I., Ionescu F., Dulgheru V., Constantin G., Sochirean A. Integrated CAE development of precessional drives using Autodesk Inventor platform // International Conference on Manufacturing systems – ICMaS, (15th, 26-27 /10/2006, University POLITEHNICA of Bucharest, România, 2006, p. 23-30.