Embed Size (px)
Citation preview
Oscilações
Prof. Karl Marx
Universidade Federal do Maranhão - Campus Bacabal
31 de Maio de 2012
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Movimento Harmônico Simples
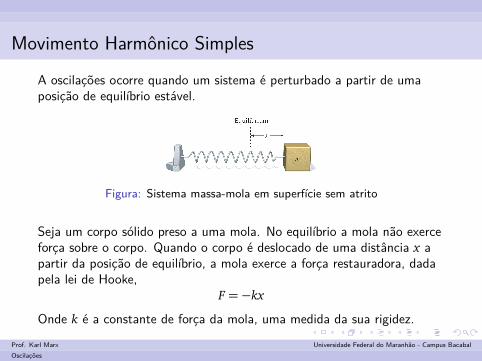
A oscilações ocorre quando um sistema é perturbado a partir de umaposição de equilíbrio estável.
Figura: Sistema massa-mola em superfície sem atrito
Seja um corpo sólido preso a uma mola. No equilíbrio a mola não exerceforça sobre o corpo. Quando o corpo é deslocado de uma distância x apartir da posição de equilíbrio, a mola exerce a força restauradora, dadapela lei de Hooke,
F =−kx
Onde k é a constante de força da mola, uma medida da sua rigidez.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Movimento Harmônico Simples
A oscilações ocorre quando um sistema é perturbado a partir de umaposição de equilíbrio estável.
Figura: Sistema massa-mola em superfície sem atrito
Seja um corpo sólido preso a uma mola. No equilíbrio a mola não exerceforça sobre o corpo. Quando o corpo é deslocado de uma distância x apartir da posição de equilíbrio, a mola exerce a força restauradora, dadapela lei de Hooke,
F =−kx
Onde k é a constante de força da mola, uma medida da sua rigidez.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Através da 2a lei de Newton, temos −kx =max. Então a aceleração
ax =−k
mx
ou
a=−ω2x, onde ω2 = k/m
Assim, a força e a aceleração são proporcionais e opostas aodeslocamento. Esta é uma característica que identifica sistemas queexibem o movimento harmônico simples (MHS).
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Através da 2a lei de Newton, temos −kx =max. Então a aceleração
ax =−k
mx
ou
a=−ω2x, onde ω2 = k/m
Assim, a força e a aceleração são proporcionais e opostas aodeslocamento. Esta é uma característica que identifica sistemas queexibem o movimento harmônico simples (MHS).
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Através da 2a lei de Newton, temos −kx =max. Então a aceleração
ax =−k
mx
ou
a=−ω2x, onde ω2 = k/m
Assim, a força e a aceleração são proporcionais e opostas aodeslocamento. Esta é uma característica que identifica sistemas queexibem o movimento harmônico simples (MHS).
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
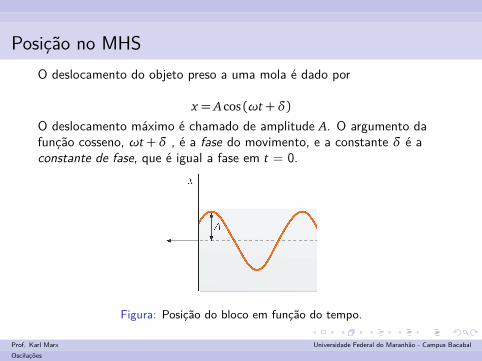
Posição no MHSO deslocamento do objeto preso a uma mola é dado por
x = A cos (ωt+δ)O deslocamento máximo é chamado de amplitude A. O argumento dafunção cosseno, ωt+δ , é a fase do movimento, e a constante δ é aconstante de fase, que é igual a fase em t = 0.
Figura: Posição do bloco em função do tempo.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Sabendo que v= dx/dt. Então, a velocidade no MHS é dada por
vx =−Aω sen (ωt+δ)
Podemos determinar a posição inicial e a velocidade inicial, fazendot= 0, ou seja
x0 = A cos (0+δ) = A cosδ
v0 =−Aω senδ
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Período e Frequência
O tempo que leva para um objeto deslocadoexecutar um ciclo completo de movimentooscilatório, é chamado período T. O inversodo período é a frequência f , que é o númerode ciclos por unidades de tempo:
f =1
T
A unidade de frequência é ciclo por segundo(ciclo/s), chamado de Hertz (Hz).
Figura: Posição, velocidade eaceleração no MHS
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Período e Frequência
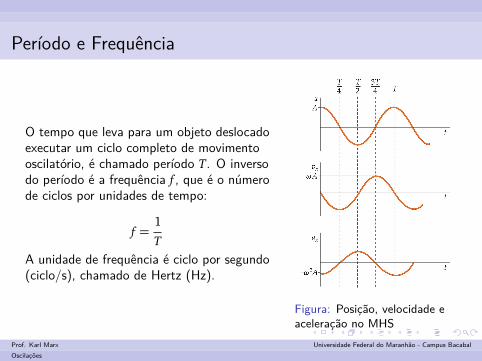
O tempo que leva para um objeto deslocadoexecutar um ciclo completo de movimentooscilatório, é chamado período T. O inversodo período é a frequência f , que é o númerode ciclos por unidades de tempo:
f =1
TA unidade de frequência é ciclo por segundo(ciclo/s), chamado de Hertz (Hz).
Figura: Posição, velocidade eaceleração no MHS
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
O período T é o menor intervalo de tempo que satisfaz a relação
x(t) = x(t+ T)
para todo t.
Substituindo x = A cos (ωt+δ) nesta relação, teremos
A cos (ωt+δ) = A cos [ω(t+ T) +δ]= A cos [ωt+δ+ωT]
Mas sabendo que cos(x) = cos(x+ 2π), então
ωT = 2π,
ω=2π
TA constante ω é chamada de frequência angular. Possui unidade derad/s.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações

O período T é o menor intervalo de tempo que satisfaz a relação
x(t) = x(t+ T)
para todo t. Substituindo x = A cos (ωt+δ) nesta relação, teremos
A cos (ωt+δ) = A cos [ω(t+ T) +δ]= A cos [ωt+δ+ωT]
Mas sabendo que cos(x) = cos(x+ 2π), então
ωT = 2π,
ω=2π
TA constante ω é chamada de frequência angular. Possui unidade derad/s.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações

O período T é o menor intervalo de tempo que satisfaz a relação
x(t) = x(t+ T)
para todo t. Substituindo x = A cos (ωt+δ) nesta relação, teremos
A cos (ωt+δ) = A cos [ω(t+ T) +δ]= A cos [ωt+δ+ωT]
Mas sabendo que cos(x) = cos(x+ 2π), então
ωT = 2π,
ω=2π
TA constante ω é chamada de frequência angular. Possui unidade derad/s.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações

A frequência é relacionada por
ω= 2πf
como ω=Æ
km, a frequência e o período de um corpo preso a uma mola
se relacionam com a constante de força k e a massa m, da seguinteforma:
f =1
T=ω
2πlogo,
f =1
2π
r
k
m
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Exemplo 1
Um corpo está preso a uma mola que tem uma constante de força k =400 N/m. (a) Determine a frequência e o período do movimento docorpo quando ele é deslocado do equilíbrio e largado.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações

Exemplo 2
Você está sentado numa prancha de surfe, que sobe e desce ao flutuarsobre algumas ondas. O deslocamento vertical da prancha y é dado por
y = (1,2m) cos�
1
2,0st+π
6
�
(a) Determine a amplitude, a frequência angular, a constante de fase, afrequência e o período do movimento. (b) Onde está a prancha em t =1,0 s? (c) Determine a velocidade e aceleração como funções do tempot. (d) Determine os valores iniciais da posição, da velocidade e daaceleração da prancha.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Exemplo 3
Um bloco de 2,0 kg está preso a uma mola. A constante de força damola é k= 196 N/m. O bloco é afastado 5,0 cm de sua posição deequilíbrio e liberado em t = 0. (a) Determine a frequência angular ω, afrequência f e o perído T. (b) Escreva x como função do tempo.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Energia no MHSSeja um corpo preso a uma mola que executa um MHS, sabendo que aforça restauradora que age no corpo é −kx. Então a energia potencialelástica é
U =1
2kx2
Sabendo que x = A cos (ωt+δ), substituindo teremos
U =1
2kA2 cos2 (ωt+δ)
Enquanto a energia cinética do sistema é K = 12mv2, ,substituindo a
velocidade:
K =1
2mω2A2 sen2 (ωt+δ)
mas ω2 = k/m , então
K =1
2kA2 sen2 (ωt+δ)
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Energia no MHSSeja um corpo preso a uma mola que executa um MHS, sabendo que aforça restauradora que age no corpo é −kx. Então a energia potencialelástica é
U =1
2kx2
Sabendo que x = A cos (ωt+δ), substituindo teremos
U =1
2kA2 cos2 (ωt+δ)
Enquanto a energia cinética do sistema é K = 12mv2, ,substituindo a
velocidade:
K =1
2mω2A2 sen2 (ωt+δ)
mas ω2 = k/m , então
K =1
2kA2 sen2 (ωt+δ)
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Pela definição de energia mecânica total, temos que E = U+K, então
E =1
2kA2 cos2 (ωt+δ) +
1
2kA2 sen2 (ωt+δ)
mas sen2α+ cos2α= 1, logo
E =1
2kA2
Assim a energia total no MHS é conservativa, e proporcional ao quadradoda amplitude da oscilação.Para um corpo em seu deslocamento máximo, a energia potencial émáxima. Enquanto a energia cinética é zero. Na posição de equilíbrio, aenergia potencial é zero e a energia cinética é máxima.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
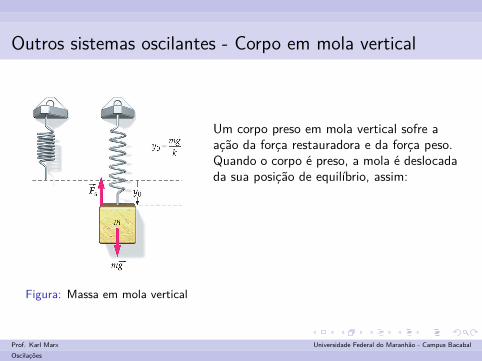
Outros sistemas oscilantes - Corpo em mola vertical
Figura: Massa em mola vertical
Um corpo preso em mola vertical sofre aação da força restauradora e da força peso.Quando o corpo é preso, a mola é deslocadada sua posição de equilíbrio, assim:
ky0 =mg
y0 =mg
k
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
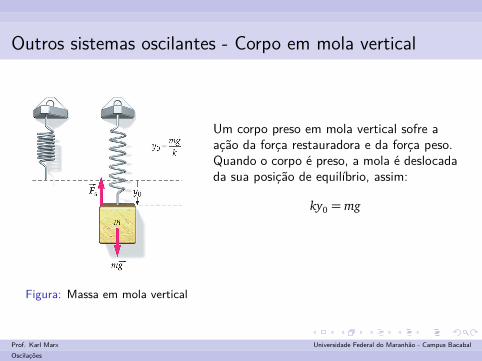
Outros sistemas oscilantes - Corpo em mola vertical
Figura: Massa em mola vertical
Um corpo preso em mola vertical sofre aação da força restauradora e da força peso.Quando o corpo é preso, a mola é deslocadada sua posição de equilíbrio, assim:
ky0 =mg
y0 =mg
k
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
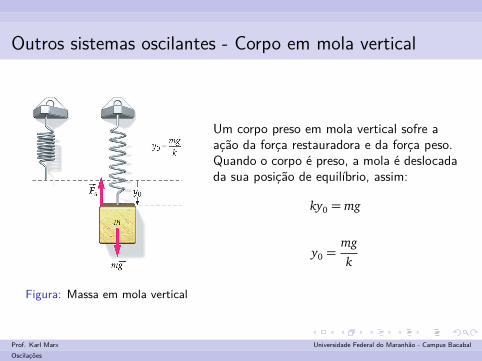
Outros sistemas oscilantes - Corpo em mola vertical
Figura: Massa em mola vertical
Um corpo preso em mola vertical sofre aação da força restauradora e da força peso.Quando o corpo é preso, a mola é deslocadada sua posição de equilíbrio, assim:
ky0 =mg
y0 =mg
k
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Como y0 é a nova posição de equilíbrio então a força restauradora será
Fy =−k(y− y0)
ouFy =−ky′
Portanto as equações de movimento serão em função de y′:
y′ = A cos (ωt+δ)
onde ω=p
k/m
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
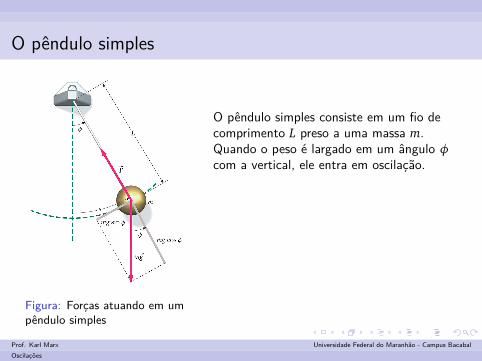
O pêndulo simples
Figura: Forças atuando em umpêndulo simples
O pêndulo simples consiste em um fio decomprimento L preso a uma massa m.Quando o peso é largado em um ângulo φcom a vertical, ele entra em oscilação.
As forças que atuam sobre o corpo são aforça peso e a tensão do fio T. A umângulo φ com a vertical, o peso temcomponente mg senφ, tangente ao arco,Usando a 2a lei, temos:
−mg senφ =mat
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações

O pêndulo simples
Figura: Forças atuando em umpêndulo simples
O pêndulo simples consiste em um fio decomprimento L preso a uma massa m.Quando o peso é largado em um ângulo φcom a vertical, ele entra em oscilação.As forças que atuam sobre o corpo são aforça peso e a tensão do fio T. A umângulo φ com a vertical, o peso temcomponente mg senφ, tangente ao arco,Usando a 2a lei, temos:
−mg senφ =mat
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
A aceleração tangencial está relacionada com a aceleração angular α,at = Lα. Então,
−g senφ = Lα,
α=−g senφ
L.
Se φ é pequeno, então senφ ≈ φ. Assim, a aceleração angular torna-se
α=−gφ
L
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
A aceleração tangencial está relacionada com a aceleração angular α,at = Lα. Então,
−g senφ = Lα,
α=−g senφ
L.
Se φ é pequeno, então senφ ≈ φ. Assim, a aceleração angular torna-se
α=−gφ
L
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
A aceleração tangencial está relacionada com a aceleração angular α,at = Lα. Então,
−g senφ = Lα,
α=−g senφ
L.
Se φ é pequeno, então senφ ≈ φ. Assim, a aceleração angular torna-se
α=−gφ
L
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Comparando com a aceleração de um corpo preso a uma mola:
α=−g
Lφ ; a=−ω2x
Então temos que no caso do pêndulo simples, o movimento oscilatórioserá feito em φ:
φ = φ0 cos (ωt+δ),
onde ω=Æ
gL, e φ0 é deslocamento angular máximo.
Quanto maior o comprimento do pêndulo, maior será o período deoscilação.
T = 2π
r
L
g
Vale lembrar que estas expressões são válidas apenas para pequenosvalores de φ.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Comparando com a aceleração de um corpo preso a uma mola:
α=−g
Lφ ; a=−ω2x
Então temos que no caso do pêndulo simples, o movimento oscilatórioserá feito em φ:
φ = φ0 cos (ωt+δ),
onde ω=Æ
gL, e φ0 é deslocamento angular máximo.
Quanto maior o comprimento do pêndulo, maior será o período deoscilação.
T = 2π
r
L
g
Vale lembrar que estas expressões são válidas apenas para pequenosvalores de φ.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Comparando com a aceleração de um corpo preso a uma mola:
α=−g
Lφ ; a=−ω2x
Então temos que no caso do pêndulo simples, o movimento oscilatórioserá feito em φ:
φ = φ0 cos (ωt+δ),
onde ω=Æ
gL, e φ0 é deslocamento angular máximo.
Quanto maior o comprimento do pêndulo, maior será o período deoscilação.
T = 2π
r
L
g
Vale lembrar que estas expressões são válidas apenas para pequenosvalores de φ.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
Exemplo 3
Determine o período de um pêndulo simples de 1,0 m de comprimentoque executa pequenas oscilações.
Prof. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
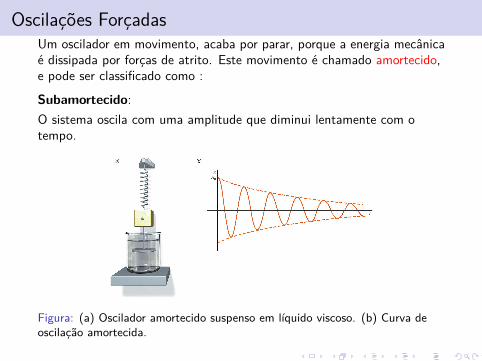
Oscilações ForçadasUm oscilador em movimento, acaba por parar, porque a energia mecânicaé dissipada por forças de atrito. Este movimento é chamado amortecido,e pode ser classificado como :
Subamortecido:O sistema oscila com uma amplitude que diminui lentamente com otempo.
Figura: (a) Oscilador amortecido suspenso em líquido viscoso. (b) Curva deoscilação amortecida.
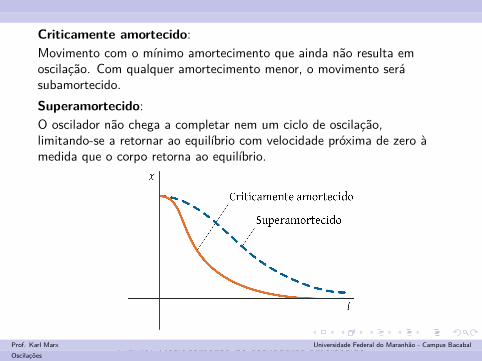
Criticamente amortecido:Movimento com o mínimo amortecimento que ainda não resulta emoscilação. Com qualquer amortecimento menor, o movimento serásubamortecido.Superamortecido:O oscilador não chega a completar nem um ciclo de oscilação,limitando-se a retornar ao equilíbrio com velocidade próxima de zero àmedida que o corpo retorna ao equilíbrio.
Figura: Deslocamento de osciladores amortecidoProf. Karl Marx Universidade Federal do Maranhão - Campus BacabalOscilações
















