Embed Size (px)
DESCRIPTION
control de temperatura usando un PID programado en PLC y electrónica de control por modulador de ancho de pulso
Citation preview
PROYECTO FINAL:
PID para control de temperatura de un horno eléctrico
OBJETIVO
Con un PID del programa RSLogix500 vamos a controlar la temperatura de un horno eléctrico , utilizando para esto un modulador de ancho de pulso para controlar un ventilador que será nuestro sistema de enfriado.
REPORTE
ANÁLISIS
Primero debemos de ajustar nuestra señal de entrada al PLC, ya que nuestro sensor nos da una señal en mV. Ya teniendo esta señal la metemos al PLC donde elegimos la entrada de 0 a 5 V y una salida de 0 a 5 V, el PID controlará nuestra salida de voltaje para producir una variación en la corriente del ventilador por medio de una modulador de ancho de pulso lo que provocará una variación en la velocidad del mismo para controlar el flujo de aire frío que entra a nuestro sistema.
DISEÑO
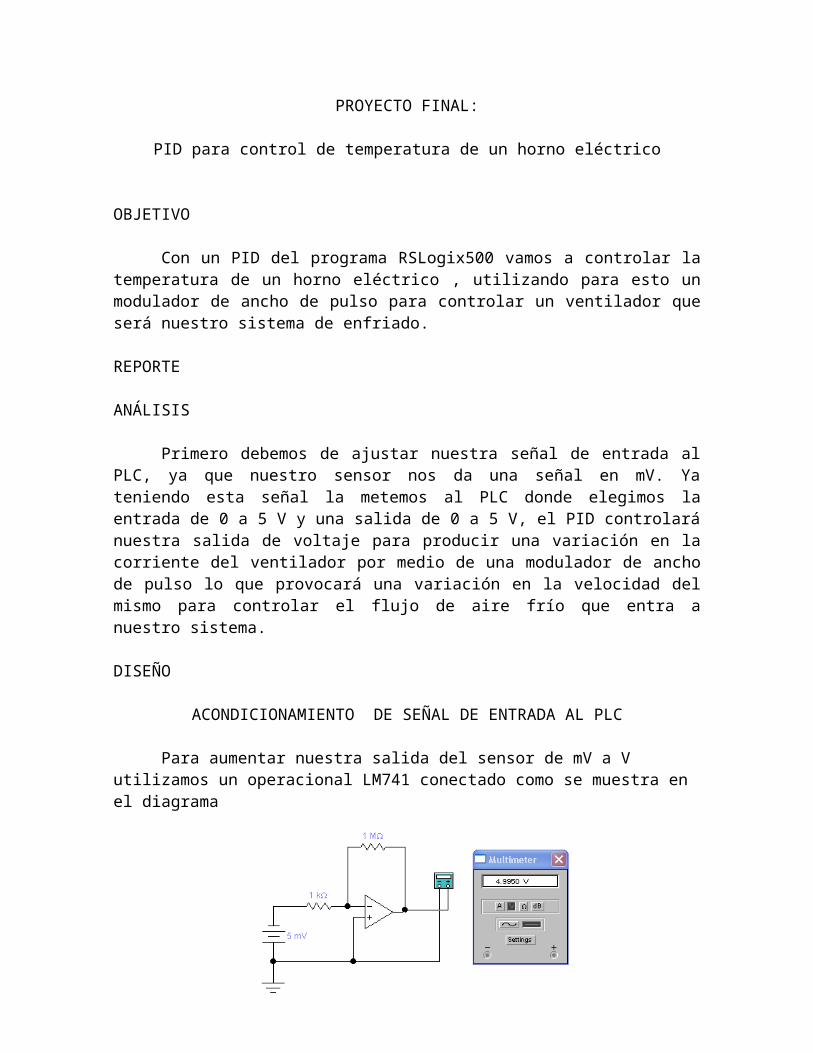
ACONDICIONAMIENTO DE SEÑAL DE ENTRADA AL PLC
Para aumentar nuestra salida del sensor de mV a V utilizamos un operacional LM741 conectado como se muestra en el diagrama
CONTROL DEL SISTEMA DE ENFRIADO CON LA SEÑAL DE SALIDA DEL PID
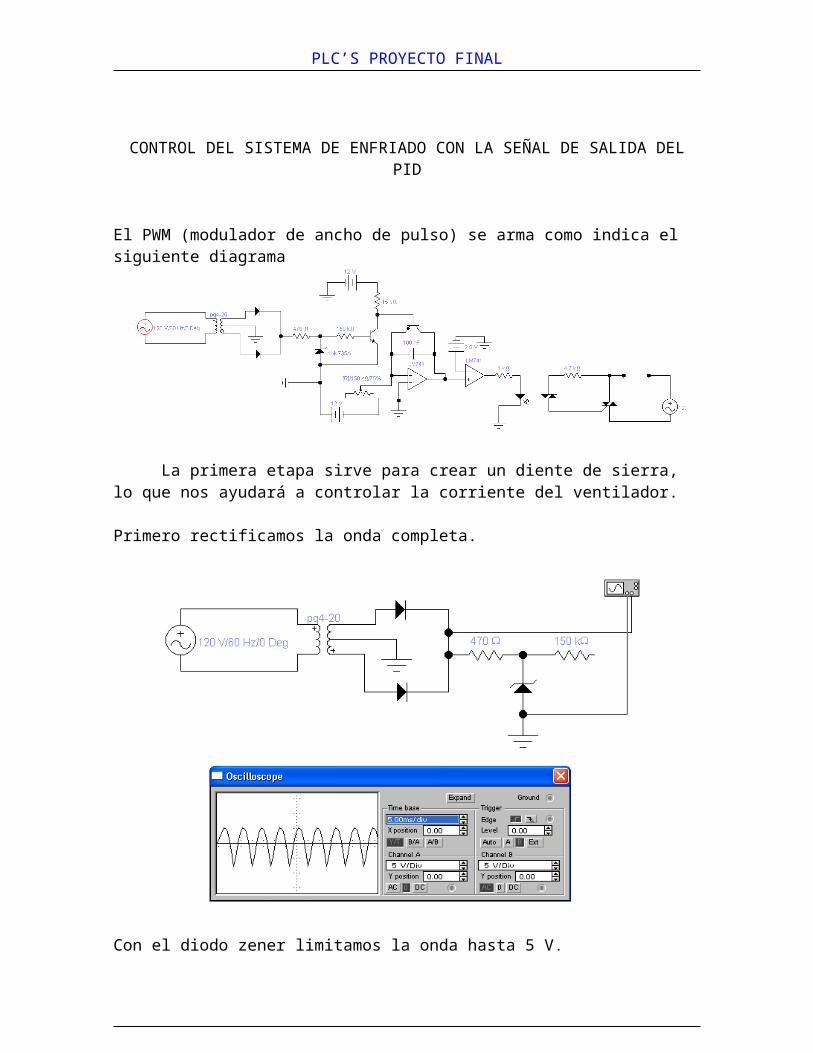
El PWM (modulador de ancho de pulso) se arma como indica el siguiente diagrama
PLC’S PROYECTO FINAL
La primera etapa sirve para crear un diente de sierra, lo que nos ayudará a controlar la corriente del ventilador.
Primero rectificamos la onda completa.
Con el diodo zener limitamos la onda hasta 5 V.
PLC’S PROYECTO FINAL
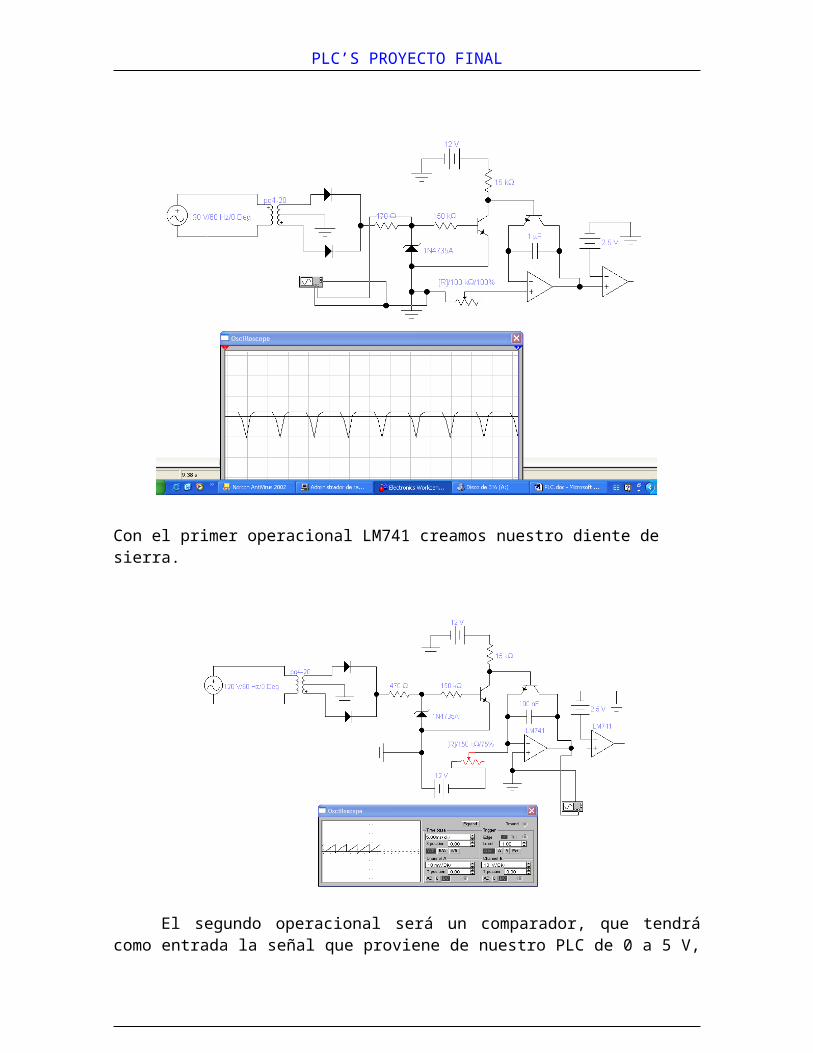
Con el primer operacional LM741 creamos nuestro diente de sierra.
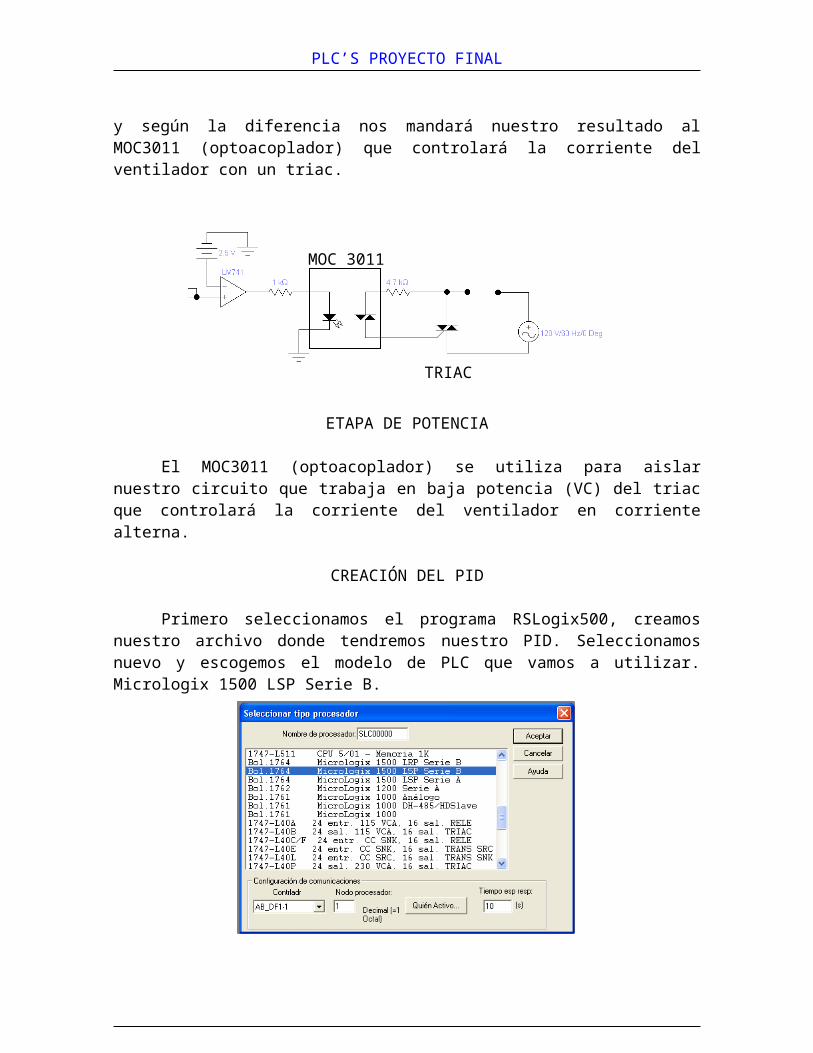
El segundo operacional será un comparador, que tendrá como entrada la señal que proviene de nuestro PLC de 0 a 5 V, y según la diferencia nos mandará nuestro resultado al MOC3011 (optoacoplador) que controlará la corriente del ventilador con un triac.
ETAPA DE POTENCIA
El MOC3011 (optoacoplador) se utiliza para aislar nuestro circuito que trabaja en baja potencia (VC) del triac que controlará la corriente del ventilador en corriente alterna.
CREACIÓN DEL PID
Primero seleccionamos el programa RSLogix500, creamos nuestro archivo donde tendremos nuestro PID. Seleccionamos nuevo y escogemos el modelo de PLC que vamos a utilizar. Micrologix 1500 LSP Serie B.
MOC 3011
TRIAC
PLC’S PROYECTO FINAL
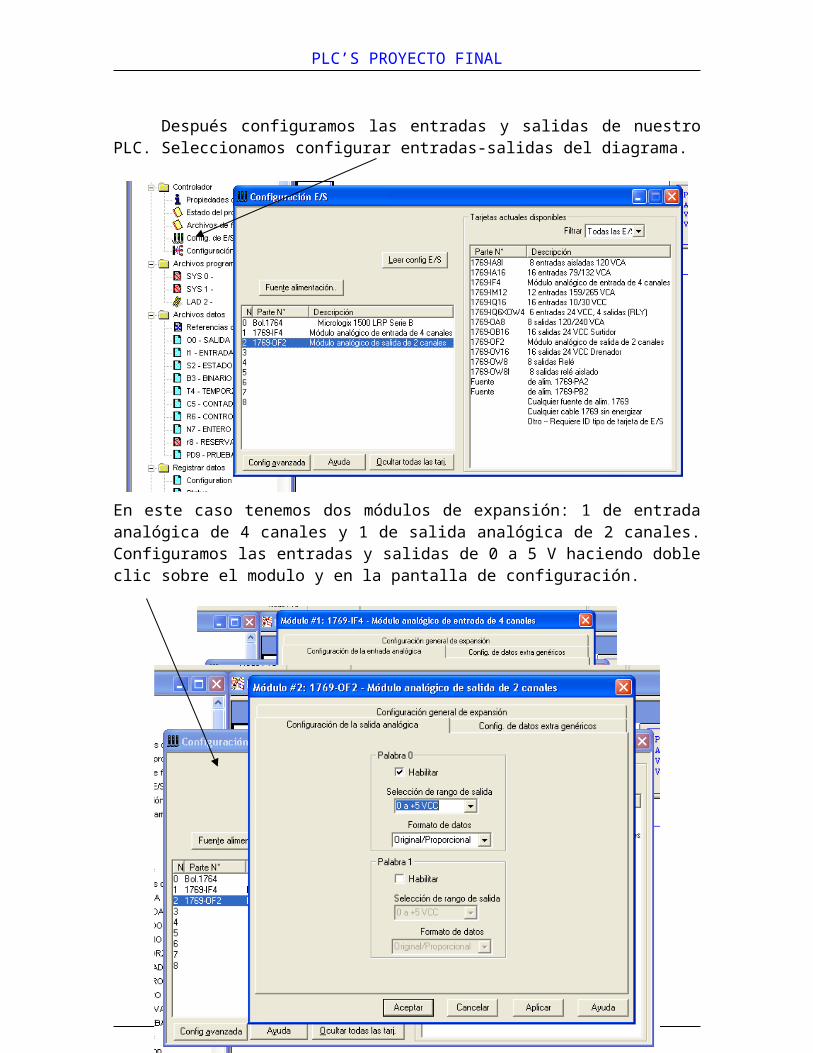
Después configuramos las entradas y salidas de nuestro PLC. Seleccionamos configurar entradas-salidas del diagrama.
En este caso tenemos dos módulos de expansión: 1 de entrada analógica de 4 canales y 1 de salida analógica de 2 canales. Configuramos las entradas y salidas de 0 a 5 V haciendo doble clic sobre el modulo y en la pantalla de configuración.
PLC’S PROYECTO FINAL
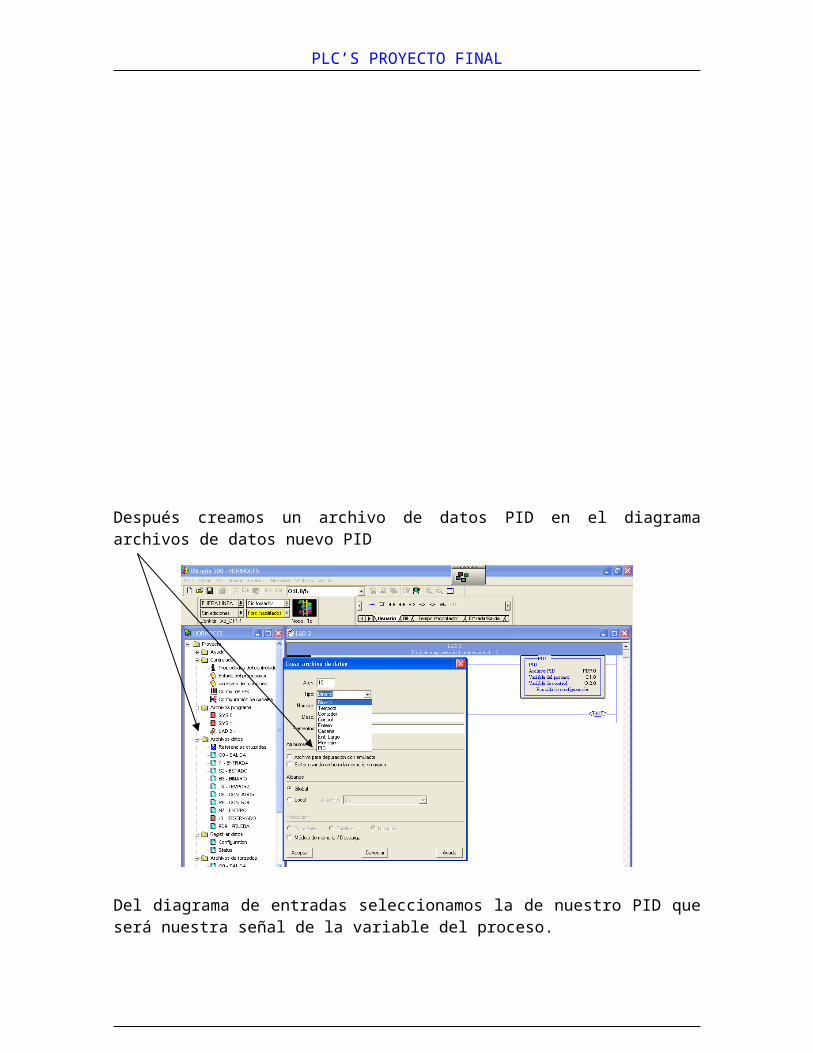
Después creamos un archivo de datos PID en el diagrama archivos de datos nuevo PID
Del diagrama de entradas seleccionamos la de nuestro PID que será nuestra señal de la variable del proceso.
PLC’S PROYECTO FINAL
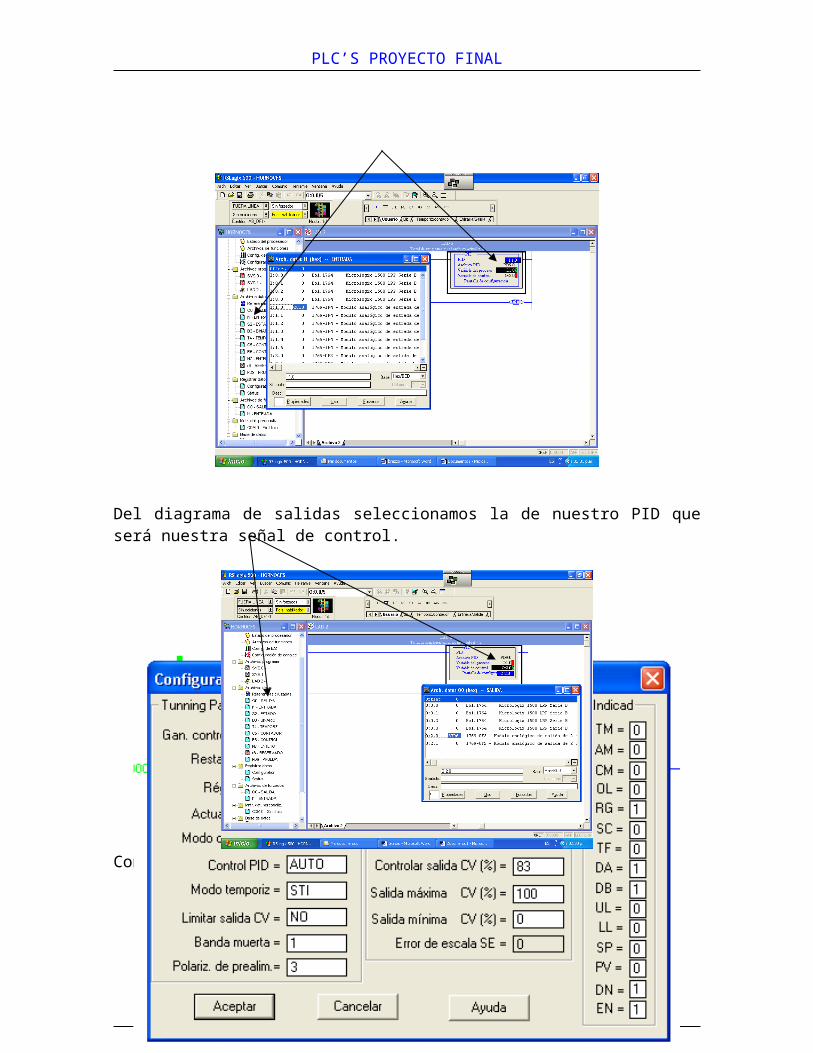
Del diagrama de salidas seleccionamos la de nuestro PID que será nuestra señal de control.
Como último paso ajustamos los parámetros de nuestro PID.
PLC’S PROYECTO FINAL
El punto de ajuste mínimo es en 0 V de nuestro sensor que empieza a funcionar a los 60°C y el máximo hasta 5 V a 130 °C.
El modo de control es sp-pv que es el punto de ajuste menos la variable para que al ser cero la diferencia envíe 5 V y viceversa. A nuestro comparador del PWM.
El control Ti lleva más rápido nuestra señal a la de referencia y el Td elimina las oscilaciones.
EXPLICACIÓN DEL FUNCIONAMIENTO DEL SISTEMA
Utilizamos un termopar que nos entrega una salida variable dependiendo de la temperatura de 0 a 5 MV. Esta salida la convertimos a V con un operacional. Lo que nos da nuestra entrada al PID.
Armamos un PWM para controlar la velocidad del ventilador que será nuestro sistema de enfriamiento. Se puede controlar la corriente del horno, pero el cambio en la temperatura sería mas lento.
Creamos un PID en nuestro programa que controlará nuestro sistema de acuerdo a sus parámetros, cambiando el punto de ajuste de nuestra pantalla de configuración del PID este lo llevará a nuestra salida deseada automáticamente.
MATERIAL Y EQUIPO UTILIZADO RESISTENCIAS
1 - 470 1 - 150 k1 - 15 k1 – POTENCIOMETRO 100 k2 - 1 k
PLC’S PROYECTO FINAL
1 - 1 M1 - 4.7 M
2 DIODOS1 DIODO ZENER 5 V2 TRANSISTORES 2N22221 OPTOACOPLADOR MOC 30117 OPERACIONALES LM741
CONCLUSIONES
Con este proyecto vemos una aplicación real del programa RSLogix500 y del uso del PLC, el modelo real del sistema se controlaba perfectamente y mantenía el error entre –2°C y +1°C del punto de referencia que queríamos, con lo que podemos controlar la temperatura automáticamente desde la computadora.
A lo largo del proyecto nos encontramos con diversos problemas que tuvimos que resolver, todo esto en la práctica, con lo que unimos la teoría y lo real en un control creado por nosotros. Lo que nos ayuda para resolver problemas que podemos encontrar realmente en la planta, a partir de este proyecto se pueden controlar diversas variables como iluminación, velocidad, etc. Sólo dependiendo de elegir los sensores y actuadores adecuados para tal propósito.





























