Embed Size (px)
Citation preview

ANÁLISE DE GRANDES DEFORMAÇÕES E PLASTICIDADE
POR MEIO DE ELEMENTOS FINITOS ISOPARAMÉTRICOS
Lu-i.z Landau
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE
PÕS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE
JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO
DO GRAU DE MESTRE EM CIÊNCIAS (M.Sc.)
Aprovada por: ~-r~raí~~ / Nelson Francisco Favilla Ebecken
Presidente
r;::=:=>~ ~4----o ~ Paulo Alcantar~
RIO DE JANEIRO ESTADO DO RIO DE JANEIRO - BRASIL
SETEMBRO DE 1976

A meu~ pa~~ e ~~mão~.

AGRADECIMENTOS
Ao Professor FERNANDO LUIZ LÔBO B. CARNEIRO como co
ordenador do Programa de Engenharia Civil da COPPE/UFRJ.
Ao Professor NELSON FRANCISCO FAVILLA EBECKEN pela
orientação e amizade.
Aos colegas, professores e funcionários da COPPE.
Ao CNPq e ao CEPEL pelo apoio financeiro concedido.

SUMÃRIO
Através do método dos elementos finitos, analisa-se
o comportamento não-linear de problemas de grandes deformações
e plasticidade. Tanto para a formulação Lagrangeana como para
a Euleriana, aproxima-se o contínuo por elementos isoparamétri
cos quadráticos, e a análise de estado plano de tensão e defor
mação, e de sólidos de revolução é efetuada. Para a solução
de problemas de estruturas de superfície, como placas e cascas,
degenerou-se elementos tridimensionais quadráticos obtendo-se
com este procedimento resultados bastantes satisfatórios. As
soluções de vários exemplos são discutidas e comparadas, e alg~
mas conclusões apresentadas.

iv
ABSTRACT
Through the finite element method, the non-linear
behavior of problems involving large deformation and plasticity
is analysed. Both for Lagrangian and Eulerian formulation,
the continuous is approximated by quadratic isoparametric
elements, and the analysis of plane stress, plane strain and
revolution solids is effected. For the solution of surface
structural problems, such as plates and shells, quadratic
tridimensional elements were degenerated and quite satisfactory
results were obtained with this procedure. The solutions to
various examples are discussed and compared, and certain
conclusions are presented.

V
fNVICE
Capítulos: Páginas:
INTRODUÇÃO 1
I FORMULAÇÃO E SOLUÇÃO DAS EQUAÇÕES DE EQUILI
BRIO
1.1
1. 2
1. 3
O Referencial ...................... .
Tensor de Deformação ............... .
Equaç5es de Equilíbrio ............. .
1.4 Tensores de Piola-Kirchhoff, Equaç5es
de Equilíbrio na Descrição Referenci
4
4
5
8
a 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1. 5 Princípio dos Trabalhos Virtuais .... 15
1.6 Discretização e Aproximação do Contí
n uo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 7
1.7 Métodos de Solução .......... .... .... 20
1.8 Algoritmos Implementados ... .. .... ... 21
1.8.1 Solução Inc4emental ............... 22
1.8.2 Solução Ite4ativa - Mêtodo de Newton
-Raphl>on . . . . . . . . . . . . . . . • . . • • . . . . . • 23

Capítulos:
II
III
IV
Vi
Páginas:
1.8.3 Soluçio Mlata .. ...... .. ........ ... 24
1.9 Critérios de Convergência .. .. .. ..... 26
ELEMENTOS FINITOS ISOPARAMÉTRICOS ........ . 32
2.1 Forma Explícita da Formulação Lagra~
geana .............................. . 32
2. 2 Forma Explícita da Formulação Euleri
ana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 O
2. 3 Estado Plano de Tensão e Deformação ,
Formulação Lagrangeana
2.4 Sólido Axissimétrico, Formulação La
grangeana .......................... .
2. 5 Elementos Implementados ............ .
NÃO-LINEARIDADE FÍSICA ................... .
3.1 Elasticidade Linear e Hiperelasticid~
48
50
54
d e • • • • • • • • • • • • • • • • • . • • • • • • • • . • • • • • • • 5 5
3.2 Hipoelasticidade .................... 57
3.2.1 O Modelo Elaato-Plâatl~o .......... 60
3.2.1.1
3.2.1.2
Relações Constitutivas
·cálculo das Tensões Elasto-Plásti
65
cas . .. • • • • . . . .. • . . • . • • .. . . . . • • • . 75
3. 2. 2 OutJtoa Modelo• ................... .
RESULTADOS DE ANÁLISE .................... .
4.1 Casca Esférica ..................... .
82
83
84

Capítulos: Páginas:
4.2 Cilindro Sujeito a Pressão Interna 88
4.3 Casca Esférica com Carregamento Dis
tribuÍdo Uniformemente.............. 95
4.4 Placa Circular . . . . . . . . . . . . . . . . . . . . . . 100
CONCLUSÕES ................................ 109
BIBLIOGRAFIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
SIMBOLOGIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116

1
INTRODUÇÃO
Recentemente, tem-se investido um considerável es
forço nas aplicações do método dos elementos finitos à análise
de problemas não-lineares na mecânica das estruturas. O estudo
da não-linearidade geométrica e física, ou a consideração des
ses efeitos em conjunto, tem sido motivo de diversas aproxima
çoes.
A utilização de elementos finitos isoparamétricos
para grandes deformações e plasticidade, foi primeiramente apr~
sentada por Zienkiewics (2).
Na análise não-linear, a formulação geralmente é de
finida segundo três classes; métodos incrementais que nao con
sideram o desiquilÍbrio, soluções diretas das equações não-line
ares e métodos incrementais que verificam o equilíbrio. Neste
trabalho deu-se preferência aos pertencentes ao Último grupo on
de a principal condição dos métodos de soluções sequenciais ~
e

2
atendida, nao permitindo que os errros sejam acumulativos.
Utilizando-se tanto da formulação Lagrangeana como
da Euleriana, o estudo do contínuo é feito com uso de tensores
de deformação de Green ou Almansi, sem introduzir as aproxim~
ções próprias de teorias de corpos orientados.
Para derivação das leis constitutivas dos problemas
de não-linearidade física valeu-se da teoria clássica de plasti
cidade, onde as relações entre tensão e deformação dependem da
história destas componentes, isto é, o material tem uma memória
associada com o seu comportamento. Devido a dificuldade, po~
tanto, de definir as leis do material para um estado complexo
de tensão, vários critérios de plasticidade foram incorporados.
Tanto na análise de problemas de estado plano de
tensão ou deformação como no de estruturas axissimétricas com
carregamentos de revolução, utilizou-se de elementos finitos i
soparamétricos quadráticos. Para a análise de estruturas de
superfície, tentando não se limitar a problemas de simetria ax1
al, fez-se uso de elementos finitos degenerados de
isoparamétricos tridimensionais.
elementos
tulos.
A apresentação do trabalho é feita em quatro
No primeiro os princípios básicos da mecãnica do
~
cap~
con
tínuo para formulação das equações de equilíbrio são escritos

3
e sua solução por meio de elementos finitos é discutida. Ele
mentes isoparamétricos e sua especialização para a análise nao
-linear geométrica são derivados no Capítulo II. No capítulo
seguinte o problema da não-linearidade física é introduzido e
as relações constitutivas desenvolvidas para o estudo de modelo
elástico e elasto-plástico. Os resultados dos exemplos anali
sados são apresentados e comparados no Último capítulo.
mas conclusões são comentadas.
Alg~
Os procedimentos automáticos de análise foram pr~
gramados em linguagem ALGOL (Sistema B-6700 NCE/UFRJ), para se
rem implementados na linguagem LORANE/NL (19).

CAPÍTULO I
FORMULAÇÃO E SOLUÇÃO DAS EQUAÇÕES DE EQUILÍBRIO
1.1 O REFERENCIAL
Na mecânica do contínuo dois tipos de descrição sao
comumente usados, a descrição referencial e a espacial (1).
Na primeira as variáveis independentes sao a posição
xi de uma partícula numa configuração de referência arbitrária
e o tempo t. Na teoria da elasticidade a configuração de refe
rência escolhida é o estado natural. Quando esta configuração
é a inicial em t = O a descrição passa a ser conhecida porLagran
geana. Alguns autores denominam esta descrição de material e
a variável independente xi como coordenada material.
Na descrição espacial as variáveis independentes sao
a posição presente x ocupada pela partícula no tempo te o pró i -
prio tempo t. Esta descrição é particularmente usada em meca

5
nica dos fluidos e conhecida por Euleriana.
Para definição de grandes deformações, diversas al
ternativas são propostas, seguindo duas classes; definição em
termos da configuração não deformada e da deformada. A intra
dução do sistema de coordenadas é feita na primeira classe com
o uso da descrição referencial na configuração não-reformada (for
mulação Lagrangeana) e na segunda com a descrição espacial na
configuração deformada (Euleriana).
A formulação Lagrangeana é mais adequada para a te~
ria da elasticidade porque nela, usualmente, se assume o estado
de referência não-deformado, ao qual o corpo retorna quando de~
carregado. Entretanto, as equações de equilíbrio devem ser sa
tisfeitas na configuração deformada ou atual e para isso as ten
sões devem ser definidas neste sistema de referência. Para as
relações entre tensões e deformações deve-se ter o tensor de de
formação referenciado à configuração deformada ou o de tensões
à não-deformada, obtendo-se assim os tensores em um mesmo siste
ma de referência.
1.2 TENSOR DE DEFORMAÇÃO
Considerando o sistema de coordenadas cartesianas
fixo da Figura 1.1, ao qual todas as variáveis são definidas,

6
um ponto xi que sofre um deslocamento ui atinge a posição xi da
da por:
X , 2
X, t) 3
I
,,. /
----------------~-.-----+
1
!---,<.---, p
1 x2
..._..,__ •, ----------- "1
1 \ \
' ' '
,,,,.---, / ' ____ .. '"
p' ' \ \
/
\
\ l 1
/
(1.1)
(1. 2)
FIGURA 1.1 Definição das Coordenadas Lagrangeanas
e Eulerianas.
Em função deste deslocamento a expressao geral do
tensor de deformação toma a forma:

1 E:i j =
2
ôu i
(-- + ÔX
j
ôu j
ÔX i
7
ôu ôu k k
+ -- --) (1. 3) ÔX ÔX
i j
Se as derivadas parciais dos deslocamentos com res
peito às coordenadas materiais são pequenas comparadas a unida
de, os quadrados e produtos destas derivadas podem ser desprez~
dos em presença dos termos lineares, obtendo-se as componentes
do tensor para pequenas deformações.
exemplo, é adequada a esta hipótese.
A análise de metais, por
Para materiais vulcaniza
dos e plásticos sintéticos o uso de deformações finitas se faz
necessário. A análise plástica de metais também conduz a gra~
des deformações existindo porém uma considerável parcela
pertence ao contexto da teoria de pequenas deformações.
que
Para a descrição espacial a equaçao (1.1) é reescri
ta sendo agora u função de x i i
= X - U i i
(1.11)
Ui= U (x, X, X t) i 1 2 3
( 1. 5)
ficando o tensor de deformações definido por:

8
1 dU dU dU dU
i j " " e: = (-- + - -- -) ( 1. 6) ij 2 ax ax ax ax
j i i j
Quando os quadrados e produtos das derivadas podem
ser omitidos, estas componentes também se reduzem a forma de p~
quenas deformações, sendo que para pequenos deslocamentos como
na teoria clissica da elasticidade nio hi distinçio entre as du
as definições.
e:1
j é usualmente conhecido por tensor de deformações
Lagrangeanas ou de Green e t1
j por tensor de deformações Euleri
anas ou, também, por tensor de Cauchy para deformações infinite
simais e de Almansi para deformações finitas.
É de ressaltar que as componentes de deformaçio fi
nita envolvem somente termos lineares e quadriticos nas comp.9.
nentes do gradiente de deslocamento. Este tensor é completo e
nio uma simples aproximaçio de segunda ordem.
1.3 EQUAÇÕES DE EQUILÍBRIO
O princípio do "momentum" para um conjunto de parti_
culas estabelece que a variaçio em relaçio ao tempo do "momentum 11

s
9
total é igual a soma vetorial de todas as forças externas que
atuam nas partículas deste conjunto, já que a terceira lei de
Newton, de ação e reação, governa as forças internas. Este pri~
cfpio, estendido ao meio contínuo, constitui um postulado bási
co da mecânica.
Seja uma dada massa m, em deformação, ocupando ins
tantaneamente um volume V limitado pela superfície S sob a açao
de forças de superfície t e forças de volume f como na Figura i i
1. 2.
ds
V
1 a I O
FIGURA 1.2
dP; a t;.ds
n1
V
ds s
'ª'º+LI!
Configuração inicial e sob deformação
de um corpo de massa m.
iij
A variação do "momentum" total desta massa é d a d a
por:

10
d <f dV) ( 1. 7) p vi
dt -V
onde:
dm dxi p = vi =
dV dt
d e dt a derivada em relação ao tempo na descrição referencial.
s
Tem-se então pelo princípio do "momentum":
V
= d f P vi dV dt
V
(1. 8)
Aplicando-se o teorema da divergência e substituin
do ti por ãji • nj em (1.8), chega-se a:
ªº dv
I ji i -(-_- + f - p -) dV = o ax i dt
V j
e para um volume arbitrário, em cada ponto tem-se:
aõ ji
-- +
dv i
dt
( 1. 9)
( 1.10)

11
que sao as equaçoes de movimento de Cauchy.
No caso particular de equilíbrio estático, onde a
aceleração é nula, tem-se em cada ponto:
--+ ax
j
que sao as equaçoes de equilíbrio.
( 1.11)
Estas equações não contém nenhuma variável cinemáti
ca e nao são, geralmente, suficientes para se conhecer o estado
de tensão, pois constituem três equações diferenciais de primei
ra ordem para seis componentes de tensão incógnitas (ÔJ.i = Õ . . ) . . 1J
Equações adicionais são introduzidas através de relações consti
tutivas.
1.4 TENSORES DE PIOLA-KIRCHHOFF, EQUAÇÕES DE EQUILfBRIO NA
DESCRIÇÃO REFERENCIAL
O tensor de tensões de Cauchy, o é definido em i j '
função das coordenadas espaciais x1
e com uma adequada defini
çao de deformação, a formulação Euleriana é desenvolvida em ter
mos da descrição espacial na configuração deformada.

12
Quando o tensor de deformação é definido na descri
çao referencial o de tensões deve ser expresso como função das
coordenadas materiais e as equações de equilíbrio derivadas no
estado de referência. Os tensores de Piola-Kirchhoff aparecem
como alternativa para a representação de tensões neste
de referência. O primeiro é de definição mais simples
estado
condu
zindo a equações de equilíbrio em todo semelhantes, exceto que
a derivação é tomada em relação as coordenadas materiais. O gra~
~
de inconveniente que surge no seu emprego e a sua assimetria. O
segundo tensor é simétrico, assim como o de Cauchy, sendo então
preferido na formulação de grandes deformações, conduzindo a u
ma forma mais complexa das equaçoes de equilíbrio e movimento. O
que se procura, portanto, são expressões de força por
de área indeformada.
unidade
O primeiro tensor, cr* , fornece a força real dP na j i i
superfície dS, por unidade de área indeformada dS, e expressa a
força em função da normal n no ponto x em dS. i i
n ) • dS = dP j i
n ) j
dS
(Figura 1. 2 ) .
(1.12)
O segundo tensor, crji' ao invés da força real dP1
em dS, fornece uma força dP1 relacionada a dP1 da mesma forma
que o vetor dx1 em x 1 esta relacionado pela deformação a um ve
(Figura 1.2).

dP j
assim como
dx j
onde
J ji
=
=
- 1 J ji
ax i
ax j
dP i
dx1
13
( 1.13)
( 1.14)
(1.15)
Os tensores de Piola-Kirchhoff podem ser expressos
em função do tensor de Cauchy.
* - 1
=IJl·Jjk (1.16)
e
T T - 1
(1 : 1 J 1 • Jj D j i ,l.
- 1 1: C1 • (J ) = [J
lk ki jk
- 1 (J )
ki (1.17)
As relações inversas sao:

e
- 1 o = IJ 1 • J ji
- 1
j k
* o ki
llf
o = IJI • J • o • J ji jl lk ki
(1.18)
(1.19)
Pode-se notar, através da equaçao (1.16), que o pri.
meiro tensor geralmente não é simétrico.
A equaçao de equilíbrio na descrição referencial tem
então o seguinte aspecto:
ou
onde
* ªº _!: + f ax
j
d (o
d X j k j
i
f = p • b i i
= o (1.20)
T J )+f =O (1. 21)
ki i
m e p = ( 1. 22)
V

15
1.5 PRINCÍPIO DOS TRABALHOS VIRTUAIS
O trabalho virtual ôW das forças de superfície ti e
da.s de volume f. é dado por: 1
ôW = J crji • nj
s
ÔU dV i
(1.23)
onde ôui é o deslocamento virtual sobre a configuração de equi
lÍbrio. Supõe-se que as funções ôui tenham as primeiras deri
vadas parciais em relação a xi contínuas e que ôu1
= O nos po~
tos da superfície onde os deslocamentos reais ui são prescritos,
satisfazendo as condições de contorno.
~·: Substituindo em (1.23) t
1 dS por t 1 dS e ôui por
óxi pois ui= xi - xi, tem-se:
J ~':
J ôW = C1 n • ÔX • dS + f ôX dV =
ji j i i i s V
J 1:
= a ôJ dV (1. 24) ji ji
V
onde:

16
{: -!; t = cr j i n
i j
dV = /J 1 dV
(1. 25)
f = p b = IJ 1 f i i i
aõx1
ôJ = ji ax
j
Fazendo agora
.24) obtem-se:
= cr JT (equação 1.16) em j k ki
(1.
I JT I - dV ôW = cr j k • n ÔX dS + f ôX = ki j i i i s V
= I cr j k . JT • ôJji dV (1.26)
ki V
Atendendo as transformações da referência (1) pode-
-se escrever:
ôW = f V
(1 •• J1
ÔE ij dV = f crji ôtij dV
V
(1.27)
onde ÔE e ÔE sao as variações de deformação definidas em (1. ij ij
.3) e (1.6). As equações (1.27) e (1.26) (ou 1.24) fornecem

11
as expressoes do trabalho devido ao deslocamento virtual em fun
ção dos tensores de Piola-Kirchhoff sendo a integração sobre a
superfície e o volume indeformados.
1.6 DISCRETIZAÇÃO E APROXIMAÇÃO DO CONT!NUO
Na formulação das equaçoes da mecânica do contínuo,
nao foi introduzida nenhuma restrição, ficando então incluído
todos os efeitos que caracterizam o comportamento não-linear.
A solução em ambas as descrições apresentadas é atingida com e
ficiência pelo método dos elementos finitos (2,3,4,5 e 6).
Assim, aproximando o contínuo elemento por elemento
pela definição de interpolações adequadas, tem-se para um elemen
to genérico
u = N ô (1.28) i ij j
onde ôj e o vetor de deslocamentos nodais do elemento, contendo
todas as componentes relativas aos pontos nodais que conectam
este elemento com os adjacentes. N1 j é a matriz formada pelas
funções de interpolação que definem os deslocamentos u em qual i
quer ponto do elemento em função dos deslocamentos nodais.

18
Na apresentação que se segue a notação matricial se
rã adotada por ser especialmente conveniente em desenvolvimen
tos numéricos voltados à computação e consagrada no âmbito do
método dos elementos finitos. De (1.28) tem-se então:
u = N ô (1. 29)
A partir da equaçao (1.29) e utilizando as relações
entre deformações específicas e deslocamentos, por derivação p~
de-se sempre escrever:
de:= B dô (1. 30)
para o incremento de deformação Euleriana ou
de:= B dô ( 1. 31)
para o Lagrangeano.
Pela substituição em (1.27) de (1.30) e (1.31) ob-
tem-se:
'É = R C1 dV (1.32)
e,

19
cr. dV (1. 33)
que são as equaçoes de equilíbrio em cada configuração.
Pela introdução de forças equivalentes nodais às for
ças externas tem-se respectivamente:
I T f dV I NT (1.34) R = N + t dS
V s e,
f T
f T
R = N f . dV + N J t . dS (1. 35)
V s
Os segundos termos das equaçoes (1.32) e (1.33) p~
dem ser interpretados como forças de reação interna e~ e~ co
mo forças residuais, sendo que a necessidade de equilíbrio no
dal implica em reduzi-las tão próximas de zero quanto possível.
Como !3 e ~ dependem dos parâmetros nodais ~, e as
tensões sao funções não-lineares das deformações, o conjunto de
equações acima é não-linear e, portanto, técnicas especiais de
solução deverão ser usadas.

20
1.7 MÉTODOS DE SOLUÇÃO
Os algoritmos de resolução de sistemas de equaçoes
algébricas não-lineares, de interesse para a aplicação dos méto
dos dos elementos finitos, são os que a partir de uma estimati
va inicial a aproximação da solução é gerada por um conjunto pré
-determinado de operações que deverão convergir para a solução
exata se atenderem certas condições. Tais métodos são conheci
dos por métodos sequênciais (4) e podem ser representados por
uma fórmula de recorrência do tipo:
i+l i i
= X + S (1. 36) X
onde x1 é a aproximação da solução na etapa i e s1 Q1 sua corre
çao, sendo D1 o vetor que determina a direção da correçao e s1
o escalar que define a intensidade. A variação entre cada eta
pa é linear, podendo-se incluir em (1.36) termos que envolvem 1-1 i-2
~ , ~ , etc para se obter extrapolações de ordem superior.
A contestação matemática decorrente dos esquemas n~
méricos para a solução de sistemas de equações algébricas nao
-lineares é bem estabelecida por Oden (4) e Issacson (7). Na
referência (4) dá-se maior ênfase aos métodos de minimização,
de Newton-Raphson, incremental e incremental modificado, de in
tegração numérica e métodos que envolvem minimização através de

21
programaçao matemática. Issacson comenta também a possibilid~
de de se agregar aceleradores de convergência sendo que em Irens
( 8) e Nayak ( 6) algumas alterna tivas s.ão propostas.
Dentro dos métodos sequênciais uma outra classifica
çao pode ser feita para os procedimentos de solução de sistemas
não-lineares. Métodos fundamentalmente incrementais, que nao
necessariamente verificam o equilíbrio em cada etapa e métodos
que consideram as parcelas não-balanceadas para correção da con
figuração real de equilíbrio. No presente trabalho fixou-se a
atenção somente em métodos pertencentes ao Último grupo.
1.8 ALGORITMOS IMPLEMENTADOS
A equação (1.32) ou (1.33) pode ser escrita em fun
çao de um parâmetro de proporcionalidade das cargas À.
1/1 = 1/1(~, À) = Ç(~, À) - F(ô) = O (1.37)
onde [ representa as forças internas que equilibram o carreg~
mente externo Ç, idêntico a R (equações (1.34) e (1.35)) para
À = 1.

22
Foram utilizados os seguintes procedimentos para a
solução das equações acima.
1. 8 .1 SOLUÇÃO INCREMENTAL
A equaçao (1.37) é considerada como função de um u
nico parâmetro À e a sua diferenciação conduz a:
= À • dQ
dô
d§ + Q -
dF
dô
dô
Introduzindo as definições
d.9 = - ~À • dô
(1.38)
(1. 39)
onde !À é conhecida como matriz de rigidez de carga inicial nu
la para carregamentos conservativos e
dF = fr . dô (1.40)
- ~ onde ~Te a matriz de rigidez tangente, a equaçao (1.37) tem-se:
23
dô = o (1. 41)
Considerando pequenos incrementas do parâmetro À sua
solução fornece,
- 1
ç . tÀ (1.42)
Assim a partir de condições de equilíbrio iniciais
conhecidas, a soluçâo é obtida tomando-se pequenos incrementas
de À para que garanta uma convergência adequada.
1. 8. 2 SOLUÇÃO ITERATIVA - M~TDDD DE NEWTON-RAPHSDN
O parâmetro de carga À é agora mantido fixo e a so
lução da equação (1.37) é obtida iterativamente, atendendo a u
ma aproximação que se tenha estabelecido.
+ O na equação (1.41) leva a:
A introdução de dÃ+
d~= - (~T) . dó
e se a n-ésima iteração de ó conduz ainda a forças -n
(1.43)
residuais

24
•1• nao nulas, uma nova iteração e feita com !'n
onde:
ô = ô + !:,ô -n+l -n -n
- 1 = - ( K )
-T ij, -n
( 1. 44)
(1. 45)
Para economia do esforço computacional uma alterna
tiva que se apresenta é manter a matriz ~T inalterada em diver
sas iterações sucessivas. Este procedimento é conhecido por
Método de Newton-Raphson modificado.
As condições de existência e unicidade das soluções
obtidas pelos métodos incrementais e iterativos são discutidos
em Oden (4).
1. 8. 3 SDLUÇ/\0 MISTA
Para este tipo de solução o parâmetro de carga À ~
e
incrementado em várias etapas. Em cada uma a primeira aprox!
mação da solução é obtida pelo processo incremental e o valor
da matriz !Sr calculada para a configuração inicial da e ta p a.
Com esta primeira aproximação para os deslocamentos, a força re
25
sidual ~ é calculada e a iteração tem início, podendo ser fei -o
ta em uma das seguintes maneiras:
a) usando as equações (1.43) e (1.45) e atualizando con
tinuamente a matriz ~T;
b) procedendo como em (a) mas mantendo a matriz de ri
gidez com seu valor original ou recalculada para a
primeira iteração, constante no incremento.
Os procedimentos (a) e (b) podem ser generalizados
fornecendo-se como opção a atualização da matriz de rigidez em
qualquer instante que se fizer necessário.
Existe, portanto, diversas alternativas de procedi
mentos para a solução do sistema de equações algébricas não-li
neares e a escolha do algoritmo se faz em função do tipo de pr2
blema a ser analisado ou seja, do grau de não-linearidade envol
vido, da precisão requerida, da facilidade de aplicação, do nu
mero de equações a serem resolvidos e do esforço computacional.
A acumulação sucessiva de erros residuais em solu
çoes incrementais, de problemas acentuadamente não-lineares, P2
de redundar em aproximações grosseiras da solução real. Uma mai
or precisão so é alcançada com incrementas muito pequenos, re
querendo, na maior parte dos casos, maior esforço computacional
do que o método de Newto-Raphson convencional sem contudo atin

26
giro mesmo grau de precisão. Para uma primeira estimativa,ou
dependendo da aproximação que se queira, a solução incremental
pode ser muito eficiente sendo também bastante divulgada na so
lução de problemas de não-linearidade física.
Processos puramente iterativos sao muito simples de
serem aplicados e rápidos, do ponto de vista computacional. A
Única restrição que se faz à sua utilização é que sua convergên
eia só é assegurada para problemas onde a solução não-linear di
fere pouco da linear.
Para problemas altamente não-lineares e para uma boa
precisão dos resultados, o melhor algoritmo é o da solução mis
ta, onde para cada incremento de carga o equilíbrio é atendido
através de iterações sucessivas. O seu grande inconveniente é
o tempo de computação que se torna excessivo pela necessidade
da atualização da matriz de rigidez.
1.9 CRITÉRIOS DE CONVERGtNCIA
Nos processos iterativos ou mistos sao necessários
alguns testes para se assegurar a convergência da solução den
tro de uma precisão estabelecida. Diversas possibilidades o
correm, mas a condição principal que os métodos de solução devem
atender é que os erros não podem ser acumulativos. Para isso,

27
em cada incremento de carga e em todas as iterações, as forças
não-balanceadas (residuais) devem ser computadas.
Os critérios de convergência para problemas não-li
neares sao geralmente classificados em três grupos: critérios
de força, de tensões e de deslocamentos (9). Os primeiros sao
baseados na comparaçao entre as forças residuais e o carregamen
to externo. A norma
111/1 li T
= 1/1 • 1/1 (1.46)
das forças residuais é comparada com uma percentagem da norma
IJ RI I das forças aplicadas. Uma segunda alternativa é a compar~
çao entre o maior termo de 1/1, em valor absoluto, com uma fração
da norma Jl llRJJ do incremento de carga.
O segundo grupo envolve comparaçoes entre as varia
çoes de tensão durante uma iteração com valores pré-estabeleci
dos e, geralmente, são empregados para treliças, cabos e membra
nas sob efeito de grandes deformações.
Critérios relativos a deslocamentos sao, porem, os
mais usuais e três alternativas ocorrem:

n
li y li 1
l = 1 n
i=1
No4ma Eueled~ana mod~6~eada:
li y li = 1
2 n
No4ma miix~ma:
li Y 11 = max 3
n
l i=1
/:iô i
ô i
28
(1.47)
2
(1. 48)
( 1. 49)
onde ô 1 sao os deslocamentos na iteração atual, tiô1
a variação
destes deslocamentos em relação aos da iteração anterior e n o
numero de incógnitas envolvidas. As normas Euclediana e abso-
luta são modificadas pela introdução do termo n dividindo-as,p~
ra que se obtenha quantidades independentes do número total das
componentes de deslocamentos. Em todos os cri tê rios li y li é com
parado com um valor pré-estabelecido ou com uma percentagem da
norma llô1
li dos deslocamentos.

29
Para a análise dos tipos de norma, foram usados os
resultados da referência (9) e na Figura 1.3 estão plotados os
valores de llrll definidos por (1.47), (1.48) e (1.49) em função
do número de iterações na análise de problemas de comportamento
pós-crítico de placa delgada (fortemente não-linear) e casca a
batida (moderadamente não-linear) sendo utilizado para as solu
çoes o método de Newton-Raphson.
23456789
= ><> = < ~ a: o z
10-I
10-2
10-3
10-4
FIGURA 1.3
_____ OORl,IA MÁXIMA ---NORMA EUCLEDIANA -·--NORMA ABSOLUTA
Comparação entre critérios de convergência.
Basicamente as curvas se mantêm paralelas, indican
do ser irrelevante a escolha do tipo de critério de converge~
eia desde que se adote uma tolerância adequada.
O uso de normas que garantem limites médios de pr~
pagaçao de erro está intimamente ligado a dispersão dos valo
res de /ió./ó .. ]. ].
Nos casos de grande dispersão a norma máxima

30
li y li pode ser preferida para fornecer um limite absoluto 3
para
todas as variáveis.
-Uma expressao para o erro total pode ser obtida to
mando-se
"'
li y li di (1. 50)
onde j é a iteração atual.
Pela Figura 1.3 verifica-se que a convergência se
estabiliza rapidamente numa relação linear e como as curvas es
tão plotadas em escala semi-logari tma Ih JI pode ser
por:
ou
li y li a-1\
= e
iog IIY li = a - 13 i
aproximado
( 1. 51)
onde os coeficientes a e 131
sao obtidos através de dois valores
já determinados de li y li .
Substituindo estas equaçoes na (1.50) obtem-se:

E j
1 ~ - e
a- e 1
31
(1.52)
conhecida por norma integrada, sendo sua principal característi
ca a análise quantitativa do erro total obtido nas soluções ite
rativas.
Na análise não-linear física, para métodos de solu
çao mista, um outro tipo de critério pode ser utilizado (6). A
variação do trabalho plástico dW~ durante uma iteração é calcu
lado e comparado com uma parcela do trabalho realizado durante
o incremento de carga.
32
CAPÍTULO II
ELEMENTOS FINITOS ISOPARAMÉTRICOS
Na análise não-linear geométrica, o uso de elementos
isoparamétricos (6) permite a utilização direta do enfoque da
mecânica do contínuo, sendo alguns princípios sumarizados no ca
pÍtulo anterior. Realmente, nenhuma restrição própria de teo
rias de corpos orientados será introduzida neste contexto. De
ve-se acrescentar a este fato a excelente performance deste ti
pode elemento finito na análise linear elástica. Além disso,
as restrições e aproximações decorrentes de especializações de
teorias de vigas, placas ou cascas podem ser introduzidas e a
formulação na essência permanece inalterada.
2.1 FORMA EXPLÍCITA DA FORMULAÇÃO LAGRANGEANA
Nas derivações pertinentes ao método dos elementos
finitos uma apresentação explícita das características de um só

33
lido tridimensional se faz necessário e com este propósito re
porta-se a notação difundida por Zienkiewicz e outros (5 e 6).
O tensor de Green definido em (1.3) e agora reescri
to como:
onde:
o E = E
o ['". ÔV ôw ÔU E = '-,
ax ôy az ôy
~
e o tensor de deformações
eT -X
o
o aT -Y
L E =
1 o o ~
2
eT eT -y -x
o eT -z
ST o -z
ÔV av aw + - ' + -,
ôx az ôy
infinitesimais
o
o e -x
eT • e -z -y
o e -z
eT -Y
eT -x
a contribuição não-linear, com:
( 2. 1)
ôu
··J + - ( 2. 2) az ax
e
1 = A• e ( 2. 3)
2

av
ax
a~l T
axj
34
( 2. 4)
-A partir da expressao (1.29), u = ~ i, e utilizando
as relações entre deformações específicas e deslocamentos, tem-
~ . . - o -se, apos a d1ferenc1açao de~:
o o de: = B dó ( 2. 5)
com:
aN i
o o ax
aN i
o o ay
aN i
o o Bº az
(2.6) = -1 aN aN
i i o
ay ax
aN aN. i 1
o az ay
aN1 aN i
o az ax

35
para um nó i genérico.
A diferenciação de EL conduz a
de:L = A d8
~
sendo que~' definido em (2.4), e escrito agora como:
8 = G
onde:
aN 1
I -3 ax
aN 1
~1 " I -3 ay
aN I 1 -3
az
e I , a matriz identidade 3 x 3. -3
ô 1
( 2. 7)
( 2. 8)
( 2. 9)

36
Substituindo então 9 na equaçao (2.7), tem-se:
L L de: = B dô (2.10)
com
L B = A G (2.11)
Tendo-se em conta que x = x + u, y = y + v e z =
= z + w a matriz~' da equação (1.31), é obtida pela soma dos
termos de Bº com BL:
de: = B dô = ( B o + B L ) dô (2.12)
sendo para um nó i genérico:

xe ze : xe ze xe ze -.-, --.- --. l 1 "t "t Ne Me, ·Ne 11e ·Ne ne
1 + 1 + +
1 z e xe , z e xe z e xe 1
-- • - 1 -- • - -- • 1Ne Me 1 1Ne 11e 1Ne ne 1 1 ----------~------------4-------------
ze Ãe ze Ãe ze Ãe 1 Ne • Me 1 Ne • ~ 1 Ne • ne
+ + + Ãe ze Ãe ze Ãe ze
1Ne • Me 'Ne • 11e 'Ne • ne -----------------------,-------------
1
Ãe xe Ãe xe : Ãe xe - • - -- • - 1
'Ne Me 1Ne 11e ' 'Ne ne 1 1 l-(€1ºl) 1 + + : + = a
xe Ãe xe Ãe : xe Ãe 1 - • - -- • - 1 -- • -l "t 1 "t Ne Me · Ne 11e , · Ne ne
1 1 -----------r-----------,-------------
1 1 ze ze I ze ze I ze ze
1 1 ----, --.-, --.-'Ne Me: 'Ne 11e: 1Ne ne
1 1 -----------~-----------~-------------' 1 Ãe Ãe : Ãe Ãe : Ãe Ãe 1 -- • - 1
i: •i: l"t Ne Me , Ne 11e , · Ne ne 1 l -----------L ___________ J ____________ _ 1 1 1 1 xe xe I xe xe I xe xe 1 1 .-, --.-,
'Ne .1-1e ' 'Ne 11e 1 'Ne ne 1 1
lê
'a

1 ze xe 1 1
ze xe ze xe 1 -- . - -- . -
i: Ne ze 1 i: N e ~e i: N€ xe 1
+ 1 + + 1
.xe ze 1 xe ze xe ze 1 . - 1 -- . - -- . -i: Ne ze 1
i: N e 1 Ãe i: N€ xe - 1 - ------------L------------L-----------
ze Ãe ze Ãe ze Ãe -- . - -- . - -- . -i: N e :. e i: N e ~e i: N e :::e
+ + + Ãe ze À ze À ze
- . - -- . - -- . -i: N e :e 'N e ;;e i: N e xe
-----------L------------L-----------;;e xe ;;e xe ;;e xe -- . - -- . - -- . i: N e ze i: Ne Ãe i: Ne xe
1 i: -
('11"2:) 1 + + + = 8 xe À xe À xe À . - -- . - -- .
i: Ne ze i: N e Ãe i: N e xe -----------L------------L-----------1 1
ze ze 1 ze ze 1 ze ze 1 1 1 -- . - 1
i: N e 1 i: N e 1
i: N e :e 1 ;;e 1 xe 1 1 1 1 -----------r------------T-----------
Ãe Ãe 1 Ãe Ãe 1 Ãe 1 1 À 1 1 -- . - 1 -- . - 1
'N e ze 1 'N e ;;e 1 'N e xe 1 1 1 1
-----------~------------+-----------1 1
xe xe 1 xe xe 1 xe xe 1 1 1 -- . - 1
'N e 1 'N e ~e 1 'N e :e 1 1 xe 1 1
BE

39
ax ay Sendo
' etc, as componentes da matriz Jacobiana descrita na
ax ax equação (1.15).
Finalmente, através do incremento da parcela das for
ças internas da equação (1.33), a expressão da matriz de rigidez
definida em (1.40) é obtida.
duz a:
dF = d(J BT
V
cr dV) = f (dB T
V
(J + dcr)dV - K -T
dô
(2.15)
Como B0
nao varia com§, a diferenciação de BT con
dA T (2.16)
Além disso, definindo-se ~T como a matriz tangente
das propriedades físicas do material, pode-se escrever:
da= D -T
(2.17)
e, apos algumas transformações utilizando as propriedades da ma
triz 8 (6), chega-se a:

K = J (G T -r M
V
com
I • C1 I e- 3 X -3
M = I -3
SIM
• C1 xy
• C1 y
40
D -r
I -3
I - 3
I - 3
B)dV (2.18)
C1 xz
• C1 (2.19) yz
C1 z
onde C1 , C1 , C1 , etc sao as componentes do segundo tensor de X y Xy
Piola-Kirchhoff.
2 • 2 FORMA EXPLÍCITA DA FORMULAÇÃO EULERIANA
A transição do sistema de referência Lagrangeano p~
ra o Euleriano é particularmente simples na formulação isopara
métrica e o cálculo da matriz de rigidez se processa de uma ma
neira similar.
Definindo as funções de interpolação ~i em função

l+l
das coordenadas espaciais x, y e z
N = N ex, y, z> -1 -1
(2.20)
pode-se escrever o tensor de Almansi como:
-O -L e:=e: +e: ( 2. 21)
com
-O ~~. élv élw élu élv élv élw élu
'~ E = ---=-' ---=-' + - + - + - (2.22) - ' - ' élx ély él z ély élx él z ély él z élx
e
-L 1 E = A 8
2 -
onde A e 8 têm a mesma forma de (2.3), sendo que a derivação é
feita em relação às coordenadas espaciais.
Para as relações entre deformações específicas e de~
locamentos, a expressão (2.11+) é reescrita trocando-se as variá
veis materiais pelas espaciais, obtendo-se assim a matriz B da
equação (1.30), sendo para um nó genérico i:

42
aN1 o o ax
o aN1 o ay
o o aN1
az ~1 = ( 2 • 2 3 )
aN 1 aN 1 o ay ax
o aN1 aN1
az ay
aN 1 o aN 1
az ax
Procedendo como anteriormente e observando que to
dos os termos sao funções das coordenadas espaciais~ depende~
do, portanto, dos parâmetros nodais 2, a expressão da matriz de
rigidez é obtida, através do incremento da parcela das forças
internas, equaçao (1.32)
dF d(f -T dV) f (dBT - dV -r dÕ dv = B cr = cr + B - -- -
V V
+ -r B cr d< dV » = gT dô ( 2. 24)

43
As relações entre tensão e deformação sao mais com
plexas e dadas por:
dcr = dcr -J
+ dTw cr (2.25)
onde dcr é o incremento do tensor de Jaumann (6) definido como: -J
de: (2.26)
sendo D a matriz tangente das propriedades físicas do material -T
mas referenciada a direções que variam para cada incremento e,
o o o o -- w w y z
o o o w o - -w X z
o o o - - - o w w X y
dT = -w 1 - 1 - 1 - 1 -w w o -- w w o 2 z 2 z 2 y 2 X
1 - 1 - 1 - 1 -o - - w w o - - w w 2 X 2 X 2 z 2 y
1 - 1 - 1 - 1 -w o w w o w 2 y 2 y 2 z 2 X
(2.27)

com
:Sendo
w X
w y
w z
= d(élv él z
= d(aw
élx
= d(au
ély
élw) a -y
a u -=-> a z
a~> élx
dCdVl = Ce + e + e ldV X y Z
a variação do volume dV, onde
e X
e y
e z
= d(av + élw)
az ay
= d ( élw ax
au = d(-
ély
+ a u > a z
é)V + -)
ax
44
(2.28)
( 2. 29)
(2.30)
o incremento dF das forças internas pode ser expresso por:

dF = I V
+
tir de:
d
com
45
-T B dv I [-T
-T B D . dô + dB + B dTw
-r V
<e + e + e z) § TJ ~ dV = <i< + K )dô ( 2. 31) X y -o -G
Finalmente a variação dBT pode ser derivada a par
ô(du) -1
*T - J (2.32)
(2.33)
2. 3 ESTADO PLANO DE TENSÃO E DEFORMAÇÃO, FORMULAÇÃO LAGRANGEANA
Para o estado plano de tensão ou deformação, o ten
sor de Green é dado por:
E ' y ( 2. 34)

com
e
o
dU
ily
av~T + -
dX
o
46
1 e = A • e -x 2 -
e y
O gradiente de deslocamentos,~. é definido como:
e I aN1
-x -2 ax = ô = G ô
e I aN1
y -2 ay
onde
6 = [ªu' avj T -x ax ax
~Y = ~au' av]T [ay ay
(2.35)
(2.36)
(2.37)
(2.38)

47
e I a matriz identidade 2.2. -2
A matriz ~i definida em (2.14), relacionando o in
cremento de deformações ao de deslocamentos, se reduz a:
1 1
ax aN1 1 ay aN1 1 • -- 1 - • ax ax 1 ax ax 1
1 1 -----------r-----------1 1
ax aN1 1 ay aN1 1 • 1 - •
ay ay 1 ay ay 1 1
B 1 ( 2. 39) = -----------r-----------
-1 ax ílN1 ay aN1
• • ax ay ay ax
+ +
ax ílN1 ay aN1 •
ay ax ax ay
e a matriz M de (2.19) a:
I o I o -2 X -2 xy
M = (2.40)
I o I o -2 xy -2 y

48
2.4 SÓLIDO AXISSIMfTRICO, FORMULAÇÃO LAGRANGEANA
Para a análise de estruturas axissimétricas sujeita
a carregamentos de revolução, o tensor de Green, em coordenadas
cilíndricas r, z e o, é escrito como:
onde
e
L 1 E =
2
sendo:
E ' E ' z rz
8T -r
T e -z
T 29 -r
au av + -,
dZ ílr
e -r
e -z
=
e -z
2
(~) r
8T -r
º T
e -z
o
L + E
o
T e -z
T e -r
o
o
o
X
o
u
r
(2.41)
(2.42)
e -r
e -z 1
= A • e 2 -
u
r
(2.43)
49
e = lªu, av]T e
-r Lªr ar e : rau' av]T -z Lªz az
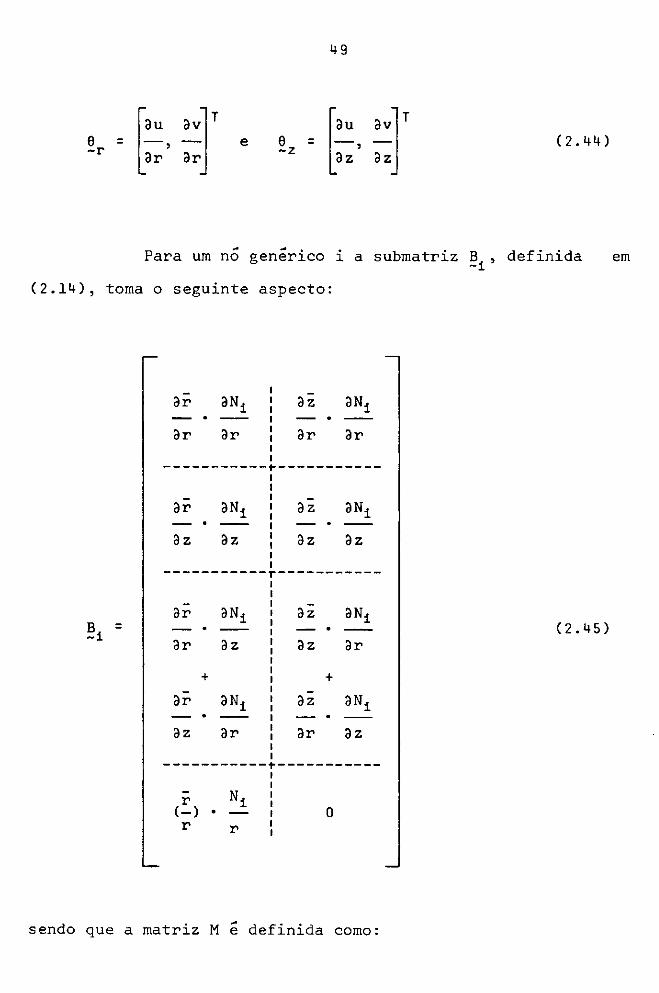
(2.44)
Para um nó genérico ia submatriz B, definida em -1
(2.14), toma o seguinte aspecto:
~1 =
ar
ar
1
aN1 :
ar 1 1 1 1 1
az
ar ar
-----------~-----------ar
az
1 1 1
aN1 :
az 1 1 1 1 1
az
az az
-----------r-----------
ar
ar
ar
az
+
•
az
ar
az
az
az
ar
ar
+
-----------~-----------r
(-) . r
1 1
N1 :
r 1 1 1
o
sendo que a matriz M é definida como:
(2.45)

50
a I a I o r -2 rz -2 -
M = a I a I o (2.46) r.z -2 z -2
o o a e
2.5 ELEMENTOS IMPLEMENTADOS
Tanto para o estudo de estado plano de tensão e de
formação como para a análise de sólidos de revolução, foram uti
lizados os elementos isoparamétricos quadráticos (5) com
pontos nodais, como na Figura 2.1.
FIGURA 2.1 Elemento isoparamétrico quadrático.
oito

51
Para a análise de estruturas de superfície (cascas,
placas) utilizou-se elementos finitos tridimensionais degenera
dos de elementos isoparamétricos tridimensionais
Figura 2. 2.
quadráticos,
O elemento é degenerado pela prescrição de variação
linear de deslocamentos ao longo da espessura e supressão da e
nergia de deformação das tensões normais ao plano da superfície
média.
A geometria do elemento descrita como:
X X 1
l ç
y = N yi + l N V (2.47) 1 1 2 31
z z 1
e o campo de deslocamentos expandido por:
u ui
t ª1 V = l N vi +}:N ç;....!. [v , V J 1 1 2 11 21
1\ w zi
(2.48)

52
..... . ,
~Vii
13 i z(w) ~·'
\L.: x\ul
FIGURA 2.2: a) Elemento degenerado.
b) Elemento tridimensional quadrático.
e) Integração 3 x 3 x 2.

53
Este processo de especializaçio para superf!cies
delgadas e espessas i bastante difundido, e descrito em d eta
lhes nas referências (10, 11).

54
CAPÍTULO III
NÃO-LINEARIDADE FÍSICA
O aspecto básico da solução de problemas de não-li
nearidade física é a determinação das leis constitutivas para
definir as matrizes tensão-deformação na análise pelo método
dos elementos finitos. Discretização com uso de elementos fi
nitos isoparamétricos implicam na necessidade de avaliar estas
matrizes nos pontos de integração do elemento. As propried~
des que descrevem o comportamento de um elemento sao obtidas,
portanto, do estado de tensão de cada ponto de integração indi
vidualmente, permitindo um conhecimento preciso de todo o domí
nio do elemento.
O propósito deste capítulo é discutir a implement~
çao de relações constitutivas específicas. Para tal, os mate
riais são classificados segundo Fung (12), como elástico, hipeE
elásticos e hipoelásticos.

55
3.1 ELASTICIDADE LINEAR E HIPERELASTICIDADE
Corno no procedimento da análise linear elástica p~
ra deslocamentos infinitesimais as formulações Lagrangeana e Eu
leriana se confundem, considera-se diretamente a análise de gra!:
des deformações.
Para a formulação Lagrangeana tem-se:
= D ijrs
E rs
( 3. 1)
onde cr e E sao o segundo tensor de Piola-Kirchhoff e o ten ij rs
sor de deformações de Green, respectivamente, e D o tensor ij rs
das propriedades físicas do material na configuração indeforma
da.
Na formulação Euleriana tem-se:
= D ijrs
• E rs
( 3. 2)
sendo cr o tensor de tensões de Cauchy, E o tensor de defor ij rs
mações de Almansi e D o tensor das propriedades físicas na ij rs
configuração atual.
Na elasticidade linear, tanto D como ij rs
D ij rs
sao constantes e definidas em termos do módulo de elasticidade

56
e do coeficiente de Poisson, para materiais isotrÓpicos.
Para materiais hiperelásticos as relações entre ten
sao e deformação são derivadas da função energia de deformação,
usualmente definida por unidade de massa do material e
pondente a formulação Lagrangeana.
d 1 w = (J
dt p ij •
Ô E ij
at
corres
( 3. 3)
As relações constitutivas,(3.1) e (3.2), sao us~das
para a avaliação das matrizes de tensão do elemento, isto é, ca~
cula-se as tensões Piola-Kirchhoff ou Cauchy diretamente das de
formações de Green ou Almansi. No cálculo das matrizes de ri
gidez torna-se necessário a cada iteração ou novo incremento a
obtenção dos tensores tangentes das propriedades do material.
Tanto na análise de materiais elásticos como hiper~
lásticos, os resultados numéricos obtidos devem ser idênticos
em ambas as formulações. Portanto, como as constantes do mate
rial independem da história da solução, a precisão depende so
mente da formulação isoparamétrica e do algoritmo de resolução
do sistema de equações, uma vez que iterações são necessárias pa
ra estabelecer o equilíbrio.

57
3.2 HIPOELASTICIDADE
Para materiais hipoelásticos como o modelo elasto
plástico, o modelo de mÔdulo tangente variável e o de descrição
pela curva tensão-deformação do material (3), os tensores cons
titutivos relacionam incrementes de tensão à incrementes de de
formação. Assim, tensores finais não podem ser relacionados
diretamente às deformações porque dependem da história da defor
maçao.
Considera-se inicialmente a análise de problemas de
pequenos deslocamentos com apenas não-linearidade física. Nes
te caso, tem-se:
(3.4) 6cr = D ij ijrs
ôe rs
onde ôcr ij
e ôe rs
sao incrementes de tensão e de deformações in
finitesimais. Neste tipo de análise assume-se que a configur~
ção inicial do corpo permanece inalterada. Assim, incrementes
de tensão e de deformações infinitesimais podem ser simplesme~
te adicionados para se obter as tensões e deformações finais já
que o tensor físico D depende da história da tensão e da de ijrs
formação.
Embora as formulações aqui discutidas sao dirigidas
a condição de grandes deformações, nos problemas práticos resol

58
vidos a lei do material é definida apenas para pequenas deforma
çoes. Um caso importante é o comportamento do modelo elasto-
plástico com uso da teoria clássica da plasticidade que é apli
cada na análise de grandes deslocamentos, porém, com pequenas
deformações. Neste tipo de análise a configuração ou geometria
do corpo é atualizada para cada iteração ou incremento de carga
conforme o método de solução utilizado.
Usando a formulação Lagrangeana, o comportamento de
materiais hipoelásticos pode ser descrito como:
6a = D • 6E ij ijrs rs
( 3. 5)
onde 6a e 6E sao incrementes do segundo tensor de Pi o 1 a -ij rs
-Kirchhoff e do tensor de deformação de Green, respectivamente.
Para a solução aproxima-se 6E por 4e a componente line rs rs
ar do tensor de Green e o cálculo do tensor de Piola-Kir-
chhoff no passo I+l é dado por:
I+l
a ij
ªª ij
I = a ij
I+l
+ 6a ij
Na formulação Euleriana, tem-se:
= :Õ • 6Ê ijrs rs
( 3. 6)
( 3. 7)

59
sendo 6ãij e 6Ers os incrementos do tensor de tensões de Cauchy
~
e do tensor de deformações de Almansi. Assume-se que D ij rs
e
definido pela história das tensões de Cauchy e para a
apromixa-se 6E rs
-por 6e
rs
Tendo calculado 6crij da relação
= D ijrs
6e rs
as tensões de Cauchy no passo I+l são obtidas por:
I + 1
a ij
-I = a
ij
I+l
+ 6a ij
solução
( 3. 8)
( 3. 9)
Em geral, a definição das relações constitutivas a
través da formulação Euleriana é preferida, uma vez que se tra
balha com componentes físicos de tensão para definir as constan
tes do material, equação (3.7), e 6ers pode ser entendido como
o incremento de deformação plástica e elástica, exatamente como
na análise de pequenos deslocamentos.
Com as várias descrições avaliadas para o comport~
mento do material, a dificuldade maior é a escolha de qual deve
ser usada no estado de análise atual. Isto depende naturalmen
te do material específico considerado e da definição escolhida

60
para os parâmetros do material. Por exemplo, na análise elas
to-plástica se a formulação Lagrangeana é usada, a tensão de es
coamento é definida como função do 29 tensor de Piola-Kirchhoff,
enquanto que para a formulação Euleriana o tensor de Cauchy a
define.
3.2.1 O MODELO ELASTD-PLASTICO
O modelo elasto-plástico pode ser ilustrado em uma
hipótética curva tensão-deformação para um estado uni-axial de
tensão, Figura 3.1. Três características devem ser notadas;
trecho elástico seguido por um escoamento e o endurecimento no
regime plástico (''strain-hardening''), no qual as tens5es cres
cem muito menos com as deformaç5es do que no regime elástico e
uma parcela de deformação, E , permanece após o descarregamento. p
G . ,
A
FIGURA 3.1
F
e D
ée
Curva tensão-deformação uniaxial.

61
O limite de proporcionalidade P, onde se tem a Últi
ma tensão do trecho linear, e o limite elástico definido como a
mais alta tensão que se pode obter sem deformações permanentes,
são geralmente assumidas coincidentes na idealização da teoria
da plasticidade. A tensão ªel é denominada tensão de escoamen
to, sendo que em análises práticas, onde se compara o comport~
menta de diversos materiais, esta tensão é usualmente definida
pelo ponto O obtido a partir de uma reta paralela a inclinação
inicial do trecho linear a uma distância E pré-estabelecida. D
Para um estado complexo de tensão as condições que
caracterizam a transição entre o regime elástico e plástico sao
dadas por funções do tipo
F = F (a_, E , K) -p
= f (a_, E ) - K -p
(3.10)
e sao conhecidas como critério de plasticidade, onde~ represe~
ta o estado de tensão atual, E a deformação plástica correspon -p
dente a este estado de tensão e K uma constante do material re
lacionada com a tensão de escoamento. Através de uma interpr~
tação geométrica os critérios de plasticidade definem superf_i
cies de escoamento (''yield surface'') no campo das tensões.
O comportamento apos o escoamento e também caracte
rizado e um fenômeno conhecido como "work-hardening" ou "strain
-hardening" tem lugar, ou seja, uma pequena variação nas tensões

62
implica em grandes variações nas deformações. Além disso, a
curva tensão-deformação característica do descarregamento é di
ferente da do carregamento, seguindo aproximadamente uma reta
paralela a inclinação original do trecho elástico ilustrado p~
las linhas OM e BC da Figura 3.1. Para o descarregamento a
partir do ponto B, se E denota o módulo de elasticidade do mate
rial, a deformação elástica é dado por:
E : e E
representada pelo segmento CD no eixo das deformações, enquanto
que a deformação plástica ou permanente,
AC.
~
E , e p
representado por
Se há um recarregamento a partir do ponto C, a cur
va tensão-deformação CF difere da do descarregamento, pois o ma
terial adquire novas propriedades elásticas, havendo um aumento
do limite elástico ou na tensão de escoamento.
No estado complexo de tensão este fenÕmeno é carac
terizado também por funções do tipo:
F = FC9:, E , k) -p
= f(q, E) - y(k) p
(3.11)
onde y é uma função do parãmetro k de endurecimento do material

63
("strain-hardening·parameter"). Estas funções representam su
perfÍcies de carregamento ("loading surfaces") no campo das ten
sões as quais, para um dado estado de tensão, separa as regiões
de deformações elásticas das plásticas, isto é, na fronteira da
superfície um incremento de carga pode produzir deformações e
lásticas se for um incremento de descarregamento, ou deformações
plásticas se for de carregamento. O critério de plasticidade,
dado pelas superfícies de escoamento, decorrem da equação (3.11),
fazendo-se y(k) = K.
A forma e a posição das superfícies dependem, em ge
ral, nao somente do estado de tensão mas, também, da história
da deformação. Além disso a superfície não é fixa, podendo se
expandir ou deslocar conforme o tipo de endurecimento do materi
al, sendo que dois comportamentos distintos devem ser
dos, isotrÓpico e cinemático.
analisa
O comportamento cinemático assume que durante defor
maçoes plásticas a superfície de carregamento translata como um
corpo rígido no espaço das tensões, mantendo o tamanho, a forma
e a orientação da superfície de escoamento. O primeiro objeti
vo desta teoria é dar condições para que o efeito Bauschinger
seja analisado (13, 14). Este fenômeno é caracterizado pelo
fato de um aumento da tensão de escoamento em uma direção resul
tarem um decréscimo de mesmo valor na direção reversa.
Na Figura 3.2 tem-se o comportamento cinemático
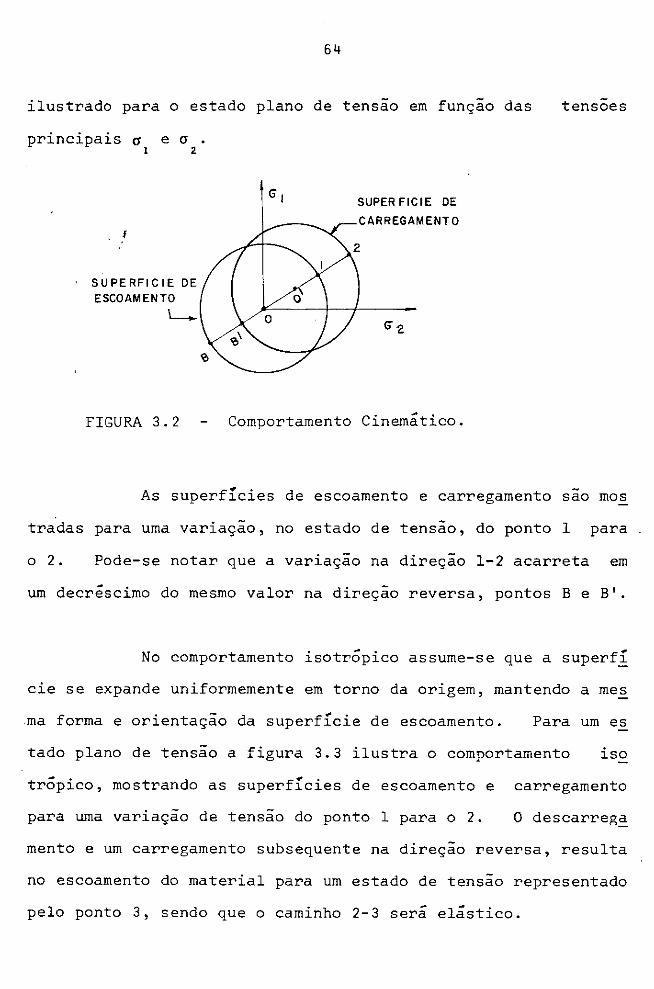
64
ilustrado para o estado plano de tensão em função das
principais a e a. 1 2
I
SUPERFICIE DE ESCOAMENTO
L....
FIGURA 3.2
SUPER FICIE DE
CARREGAMENTO
o o
G" 2 <õ'
Comportamento Cinemático.
tensões
As superfícies de escoamento e carregamento sao mos
tradas para uma variação, no estado de tensão, do ponto 1 para
o 2. Pode-se notar que a variação na direção 1-2 acarreta em
um decréscimo do mesmo valor na direção reversa, pontos B e B'.
No comportamento isotrÓpico assume-se que a superfi
cie se expande uniformemente em torno da origem, mantendo ames
ma forma e orientação da superfície de escoamento. Para um es
tado plano de tensão a figura 3.3 ilustra o comportamento iso
trópico, mostrando as superfícies de escoamento e carregamento
para uma variação de tensão do ponto 1 para o 2. O descarreg~
menta e um carregamento subsequente na direção reversa, resulta
no escoamento do material para um estado de tensão representado
pelo ponto 3, sendo que o caminho 2-3 será elástico.

SUPERFICIE DE
ESCOAMENTO
FIGURA 3.3
65
QiõQ'
SUPERFICIE DE
CARREGAMENTO
Comportamento IsotrÓpico.
Para a representação isotrÓpica o efeito Bauschinger
nao pode ser analisado. De fato, esta teoria surge da conside
ração de que no processo de endurecimento do material, trecho
OBF da Figura 3.1, qualquer aumento na tensão de escoamento re
sulta em um aumento do mesmo valor na direção reversa.
3.2.1.1 Relações Constitutivas
Se a condição de plasticidade é atingida, isto é,
!; ' p
k) = o (3.12)
deformações plásticas ocorrem e o incremento de deformação a
tua! é 'dado por:

66
Para as deformações elásticas tem-se:
- l = D .- • dcr
onde D é a matriz das constantes elásticas do material.
(3.13)
(3.14)
Para as deformações plásticas as relações constitu
tivas são baseadas no trabalho plástico máximo,
(3.15)
onde dE representa as componentes do incremento de deformações -p
plásticas resultante do estado de tensão q na superfície de es
coamento subsequente, e q 0 o estado de tensão na superfície an
terior ( 15). Para garantir a condição de convexidade na supe~
fÍcie de carregamento, a inequação leva à condição de normalida
de associada ao incremento de deformações plásticas.
incremento é dado por:
dE -p
= dà • ar
Assim o
(3.16)
ar~ onde e o vetor definido para cada estado de tensão, enquanto
ªº

67
dà e uma constante a ser determinada.
No regime plástico, F = O e, portanto,
dF da +
Definindo-se:
a = ar
ªª e A = 1
dÀ
a equaçao (3.17) pode ser escrita como:
aT • da - A• dà = O
e o incremento de deformação:
- 1 de: = D da + dÀ • a
= o
• d e: ) -p
(3.17)
(3.18)
(3.19)
(3.20)
Após a eliminação de da através da equaçao (3.19) e ,..
da pré-multiplicação em ambos os lados da equação (3.20)
T a • D chega-se a:
por

68
D D a
obtendo-se, consequentemente, a constante dÀ:
1 T dÀ = a D
A + a T • D • a - - -
que substituída em (3.20) leva finalmente a:
onde:
da = ( D - D ) de: p
1 D = -p T
A + a • D - -D a a T D
. a
(3.21)
(3.22)
(3.23)
( 3. 24)
É conveniente expressar as superfícies de escoamen
to como função de três invariantes de tensões dadas por:
(1 = ~ 1 = ( (1 + a + a ) m 3 3 X y z
1/2
= ! [e s 2 s' S2) 2 2 2 J l /2 (1 = J + + + a + a + a (3.25) 2 2 X y z Xy yz xz
para 1 1 - -,r,e; $-<e; -,r
6 6

onde
J = s 3 X
- s X
e
s = (J X X
s = (J -y y
s = (J -z z
s y
(J m
(J
m
(J
m
69
S + 2 cr z xy
(J
yz
2 2 (J - s (J - s
yz Y xz z
(J
xz
2 (J
xy
As superfícies de escoamento para os vários
rios de plasticidade podem ser dados como:
1. TRESCA
F = 2 . cr. cos~ - y(k) = O
2. HUBER-MISES
F = /3. ã - y(k) = O
( 3. 26)
crité
(3.27)
( 3 . 2 8 )

3. MOHR-COULOMB
r = cr . sena+ cr cos$ -m
4. DRUCKER-PRAGER
70
r = 3 a'. cr + cr - S = O m
sendo
2 sena a = e
h . ( 3 - sena)
-(J
sen$ • sena - c. cose= o
(3.29)
(3. 30)
6c cose a = ( 3. 31)
h . ( 3 - sena)
As superfícies definidas em 1 e 2 sao geralmente a
plicadas na análise de metais sendo que para solos, concreto e
outros, o critério de Mohr-Coulomb e sua aproximação dada por
Drucker e Prager são frequentemente usados onde C e a sao a coe
sao e o ângulo de atrito, respectivamente.
Desta forma vetor gradiente ar ~
escrito: o e
ªº ar ar ao ar ªª ar 3$ m
= -- + - + (3.32) d(J ªª ªª m
acr a cr 3$ d(J

=
71
Além disso da equaçao (3.25) pode-se obter:
2 cos 3<j>
1
-' 3 (J
aJ 3 J
ªª 3 3
-4 (J
aõ-•
e expressar o vetor gradiente por:
d<J aã J ar m 3
= e • -- + e • - + e
ªª d<J 2
ªª 3
ªª - -
onde
1
1
ªª 1 1 m =
ªª 3 o
o
o
s X
s y
ªª 1 s
z = •
ªª 2 (J 2 (J
yz
2 0 xz
2 ºxy
(3.33)
( 3. 34)
(3.35)
(3.36)

72
e,
2 s s - (J 1
z y yz
2 s s - (J 1
X z xz
2 s s - (J 1 aJ X y xy 1 3 -2 = + (J (3.37)
ªª 2 ( (J (J - s (1 ) 3 o
xz xy X yz
2 ( C1 (J - s (J ) o xy yz y xz
2 ( (J (J - s (1 ) o yz xz z xy
As constantes C, C e C para os quatro critérios 1 2 3
sao dados na Tabela (3.1).
Na presente análise somente o comportamento isotró
pico foi incorporado, sendo que o cinemático poderia sê-lo com
as recomendações da referência (6, 16).

TABELA 3.1 Constantes C, C , C. 1 2 3
CRITfRIOS DE e e PLASTICIDADE 1 2
TRESCA o 2 coscj>(l + tg cp . tg 3 cp)
HUBER-MISES o /3
MOHR-COULOMB sena cos cp [1 + tg .,. . tg 3 .p +
+ sena . (tg 3cp - tgcp)J 13
DRUCKER-PRAGER 3a 1.0
e 3
/3 sen.p - . -2 cos3cp (]
o
/3[3 - sen.p + /3" coscp
- 2 6 rJ • cos3cj)
o
sena]
_, w

74
Para o comportamento isotrÓpico, onde se assume uma
expansao uniforme da superfície de escoamento, as
subsequentes são escritas:
F = f(cr) - y(k) = O
superfícies
(3. 38)
no qual k depende da história das deformações plásticas e é de
finido como:
dk = crT de: p
Assim, da equaçao (3.18), tem-se:
1 (~ dk)
1 dy 1 A = = . dk = . H
dÀ ak dÀ dk dÀ
e 3. 39)
de:p u . . dk
dk
(3.40)
onde H é a inclinação da curva que relaciona a tensão uniaxial
y a sua deformação correspondente e:P. u
Tem-se, portanto, através das equações (3.39) e (3 .
. 16), para uma lei associativa:
dk =V. de:p u
= cr T
de: -p
= de: -p
T cr
T a cr (3.41)

75
Usando o teorema de Euler, aplicável a todas as fun
ções homogêneas f(cr) de primeira ordem, pode-se escrever:
f(cr) = y (3.42)
e, por substituição nas equaçoes (3.41) e (3.42), tem-se final
mente:
p = de:
u
3.2.1.2
e A = H (3.43)
Cálculo das Tensões Elasto-Plásticas
Durante uma iteração ou incremento de carga, quando
um ponto de integração atinge a condição de plasticidade, isto
e, F{cr) ~ O, passando, portanto, do regime elástico para o plá~
tico um fator r que separa a parcela elástica da plástica deve
ser avaliado.
Se cr denota as condições elásticas iniciais, â_e: e -o
o incremento de deformação correspondente a variação das tensões
elásticas ,

76
(3.44)
e o estudo das funções de escoamento nos leva a:
F(cr) = F < O (3.45) -o o
e
F(cr + ócr) = F > O (3.45) -o -e 1
se o ponto de integração se plastifica durante este incremento
ou iteração.
Deve-se calcular então um fator r tal que:
F(cr + r. ócr) = O -o -e
Por uma interpolação linear uma primeira
çao, r pode ser obtida: 1
r = 1
F o
F - F 1 O
(3.46)
aproxim~
(3.47)
Entretanto, devido a não-linearidade das funções F
teremos:
77
F(a + r tia ) = F f. O -o 1 -e 2
Uma melhor estimativa pode ser obtida se
que para uma posição instantânea da superfície de
isto é, para E e k constantes, podemos escrever, da -p
(3.17)
T dF = a da
Considerando
da= /ir 1
tia -e
e para pequenas variações.
dF = - F
tem-se então:
F 2
= - a
2
T tia /ir -e 1
e uma melhor aproximação parar e obtida de
r = r 1 T
a tia -e
(3.49)
notarmos
escoamento,
-e q u a ç ao
(3.50)
( 3. 51)
(3.52)
(3. 53)
( 3. 54)

78
As tensões elásticas podem ser calculadas a partir
de:
rAE
Acr = f -e D dê.= D. r. AE
o
e a parcela elasto-plástica por:
Acr -p
AE
= f rAE
D -p
(3.55)
(3.56)
Uma simples aproximação da equaçao (3.56) pode ser
obtida escrevendo:
Acr = (1-r) . D (3.57) -p -p
Para melhor avaliação da parcela elasto-plástica o
incremento de deformação ~
(1-r).AE, e dividido em n pequenos in
tervalos sendo que em cada um deles a equaçao (3.57) é aplicada
e a matriz D calculada para cada intervalo. -p O parâmetro n e
calculado relacionando o primeiro valor da função de escoamento
F , com uma parcela (5 a 10%) da tensão de escoamento y(k). 1
A solução aproximada, através da equaçao (3.57), da

79
expressao exata para o cálculo da tensão elasto-plástica
conduz geralmente a valores de tensões ~1
tais que:
fl (J p
F(cr) = F(cr + /lcr) = F ~ O -1 -o 3
(3.58)
Para evitar este pequeno erro e que ele se acumule,
uma correção atualizando as tensões para a superfície de escoa
menta correta deverá ser feita.
~
Se a parcela de correçao e dada por:
ôcr =a. p
onde p e um escalar e como
dF =
tem-se:
F = a 3
T ôcr = a
F 3
ôcr = - a <---) aT a
T a . p
( 3. 59)
(3.60)
(3.61)
O cálculo das tensões se faz então, através do se
guinte algoritmo:

80
Cálculo ds 6E a partir do
incremento de deslocamen
tos 66:
6E = 8 66
Cálculo do incremento de
tensão:
6cr = 0 flE
Estado de tensão:
cr' cr + llcr -o
Avaliação da função de es
coamento:
F = F (cr' l 1
< o
Não atingiu a cond!
çao ds plasticidade
a = a' -1
Cálculo der e n
FIM

81
+ Subtração da parcela elas
ta-plástica da estada atu
al de tensão:
q i = cr ' - C 1 - r l l!.cr
Divisão da incrementa de
deformação em n intervalas:
d~i = [c1-r)/n J . l!.f;
Solução aproximada
da equaçaa (3.56):
i = 1 , n
Correção das tensões:
(J = (J • Ô(J -i -i

82
3. 2. 2 OUTROS MODELOS
O modelo de módulo tangente variável é desenvolvido
para a análise de materiais geológicos e é apresentado na refe
rência (3). O modelo descreve uma lei isotrÓpica para o mate
rial hipoelástico nos quais os módulos de elasticidade transver
sal e longitudinal são funções das invariantes de tensão e de
formação.
O modelo de descrição pela curva tensão-deformação
uniaxial define incrementalmente a curva característica do mate
rial ( 3). O modelo define os módulos de elasticidade longit~
dinal e transversal instantâneos como uma função linear por tre
chos da deformação volumétrica atual.
Os.procedimentos para a solução em ambos os modelos
são essencialmente idênticos. A diferença entre eles está na
definição dos módulos de elasticidade e nos critérios de carre
gamento e descarregamento.

83
CAPÍTULO IV
RESULTADOS DE ANÁLISE
Neste capítulo procura-se estabelecer algumas comp~
raçoes dos resultados obtidos através da implementação dos pr~
cedimentos discutidos anteriormente.
Na análise dos dois primeiros problemas, algumas so
luções sao comparadas com as obtidas de outras formulações. No
terceiro, os resultados da análise de uma casca esférica atra
vês de elementos tridimensionais são confrontados com os de ele
mentos isoparamétricos de sólidos de revolução, utilizados uni
camente para suprir a falta de soluções do tipo de estrutura que
se propõe estudar. No Último problema, algumas das soluções
são comparadas com resultados experimentais disponíveis.
84
4.1 CASCA ESFfRICA
Como primeira aplicação, analisou-se o comportame~
to nao linear geométrico de uma casca esférica engastada, subm~
tida a açao de uma carga concentrada axial. A análise foi efe
tuada com uso de 10 elementos isoparamétricos quadráticos de s~
lidos de revolução com integração 2 x 2. A solução do sistema
de equações seguiu o método incremental iterativo, com increme~
tos de 5 lbs. O critério de convergência utilizado foi o de
deslocamentos com uso da norma absoluta(~ 0,01%).
Detalhes geométricos e as propriedades físicas do
material encontram-se na Figura 4.1. A curva carga por defle
xao central comparada com as soluções obtidas por Zienkiewics
(2) e Haisler (17) é apresentada na Figura 4.2, onde se pode n~
taro alto grau de não-linearidade do problema e o comportamento
estável da solução. Uma comparação entre as tensões Piola-Kir
chhoff e as reais na seção central da casca é feita na
4.1.
As soluções lineares e não-lineares sao
Tabela
confronta
das para P = 100 lbs através dos diagramas das deflexões e dos
momentos Mx ao longo do raio nas Figuras 4.3 e 4.4, respectiv~
mente.

1 0,0 859"
i \ \
\ \
\
gQ"
\ \
\ \
\ \
\ y
\ \
\
85
I I
I
I I
I / R: 4.758"
/ E:I07 Psl
/ \) , o,3
X
FIGURA 4.1 Características físicas e geométricas.
TABELA 4.1 Tensões Piola-Kirchhoff e Real
PIOLA-KIRCHHOFF REAL 10 5 psi 10 5 psi
sup. 1,741 1,942
a med. 1,501 1,768 X
inf. 8,575 9,535
sup. 2,902 2,95
a med. -1,239 -1,197 y
inf. 1,883 1,732

P ( 1 bs)
100
75
50
25
86
+- SOLUÇÃO LINEAR
+
+
0,05 0,1
/ /
/ /
.y
/ I
I I
I
I I
I
I 1 I 1 I I
/ /
I /
>tX XX TESE
REFERENCIA ( 2)
REFERENCIA ( 18)
0,15
FIGURA 4.2 Curva carga por deflexão central.
S (ln)

./ /
/ /
/ /
~( in)
FIGURA 4.3
/
/ /
/
87
----------~•
Solução Linear
Deflexões ao longo do raio para
P = 100 lbs
----./" - --.._
/
I / 1 I 1 1 I
M x ( lb. in/in)
/ /
/ /
FIGURA 4.4
- ----· -
S o·I uça-o Linear
Solução Não -Linear
Diagrama de Momentos Mx para P = 100 lbs
88
4.2 CILINDRO SUJEITO A PRESSÃO INTERNA
Para a análise não-linear física estudou-se inicial
mente um cilindro sujeito a pressão interna. O modelo elasto-
plástico foi considerado perfeito, sendo a tensão de escoamento
ou limite igual a 10.000 psi. # • - • As caracteristicas geometricas,
a discretização e as propriedades físicas do material encontram
-se na Figura(4.5). O comportamento elasto-plástico foi anali
sado com uso de três elementos isoparamétricos de sólidos de re
volução com integração 2 x 2 e 5 x 5, não existindo porem diferen
ça significativa entre as duas análises.
Primeiramente comparou-se os resultados obtidos com
os apresentados por Zienkiewics e Nayak nas referências (2) e
( 6 ) . O algoritmo de solução do sistema de equações seguiu o
modelo incremental-iterativo com incrementas de 1.000 psi. Pa
ra o estudo da convergência utilizou-se do critério de desloca
mentas, através da norma absoluta (~ 0,01%). Na Figura(4.6) a
curva carga por deslocamento dos pontos externos do cilindro e
apresentada. A análise é feita segundo dois critérios de pla~
ticidade, o de Huber-Mises e o de Tresca. Nas Figuras (4.7a),
(4.7b) e (4.7c), compara-se os valores das tensões ªe• cr , cr r z
para os dois critérios de plasticidade. Finalmente na Figura
(4.8), tem-se os pontos de integração plastificados segundo es
tes dois critérios.

89
A segunda parte da análise tem como objetivo a com
paração .entre os vários critérios de plasticidade implementados.
Para isto utilizou-se de um modelo incremental, com incrementas
de 1. 000 psi e integração 2 x 2. Na Figura (4.9) a curva carga
~
por deslocamento dos pontos externos e apresentada. As tensões
cr8
, cr , cr para uma razao P/Y = 0,65 são plotadas nas Figuras r z
(4.10a), (4.10b) e (4.10c).
y
b= li
E: IOx 106 psi
V: 0.33
Y: IOx103 psi
" 'I; !/ :
p~
FIGURA 4.5
--------- ~~~ ---- I Características físicas e geométricas,
e discretização.

P/y
o.e
0.7 K
0.6
O. 5
0.4
0.3
0,2
0.1
3
FIGURA 4.6
-
90
-----o--
X < <
o o o
6
referência
referencia
3 elementos
3 elementos
(2) - HUBER-MISES
( 2) TRESCA
- HUBER -MISES
- TRESCA
9
Curva carga por deslocamentos externos.
Modelo incremental-iterativo.

91
(VON MISES)
PLAS TICO 'E LASTICO ( TRESCA) 1,0 ---- · - --t -- - --
0,9
o,a
0,7
0,6
0,5
0,4
0,3
O, 2
o, 1
/~
;°/ o~
/ a)
o/
/
/ / re lerencía ( 2)
d -- - - referencia ( 2)
3 elementos
o o o 3 elementos
1,0 1,5 2,0 r/a
VON M ISES
TRES C A
VON MISES
T RE S CA
P/Y=0,76
P/Y = O, 65
FIGURA 4.7a Distribuição das tensões cr8

1,0
-O, 1
- o, 2
- O, 3
-O, 4
-0,5 I I
-o.~ ri
-0,7
FIGURA 4. 7b
G 'fy
0,25
0,20
0,15
0,10
0,05
-º·º 5 X
- o, 1 O
FIGURA 4.7c
o /
I o/
/
1,5
,/, /
/ /
/
92
,1/
2,0
/,P /
/ b)
Distribuição das tensões
/1 f
o
X /
/ /o
X X X
º- -9 _ _ 2.. /
15
C)
2,0 r; a
a r
Distribuição das tensões a z

P/y
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
O, 1
93
1 : : 1 1
a) Von Mi ses
1: :\: 1
b) Treaca
FIGURA 4.8 Pontos de integração plastificados.
V
/ /
/ /
/
-------
'/ VON MISES e DRUCKER- PRAGER.
TRESCA e MOHR - COULOMB
3 6 9 u ( b) 1.03
in
FIGURA 4.9 Curva carga por deslocamentos externos.
Modelo incremental.

ire /y PLASTICO
94
E LASTICO
O __ PLASTICO -+ELAS~~
,9
0,8
0,7
0,6 / /
/" // "
/ " / "
/ " / "-
/ 0,5 /
/ /
/ 0,4
0,3
0,2
0,1
1,0
FIGURA 4.10a
- O, 1
-0,2
-0,3
-0,4
-0,5
-.Q,6
- G" FY. y
1,0
/ /
! y
FIGURA 4.lOb
/ /
a)
1,5 2,0
Distribuição das tensões cr, p/Y = 0,65 e
-1,5
/ /
/
/
/ /
/
?' /
/
o 'la
/ b) /
Distribuição das tensões cr , p/Y = 0,65 r

G '!y
0,20
0,15
0,10
0,05 I /
10
I I
-o,o 5 I
-0,10
FIGURA 4.10c
/ I
I I
95
,,.,,,..-----/
/
I
e)
1,5 2 O rfa
Distribuição das tensões cr, p/Y = 0,65 z
4.3 CASCA ESFÉRICA COM CARREGAMENTO DISTRIBUÍDO UNIFORMEMENTE
O comportamento não-linear físico de uma casca esfé
rica engastada sob a ação de carga uniformemente distribuída ra
dial é analisada utilizando-se elementos finitos degenerados es
pecializados para estruturas de superfície. Na tentat~va de
avaliar.o comportamento deste elemento, a análise foi efetuada
também com uso de elementos finitos isoparamétricos de sólidos
de revolução, permitindo assim uma comparação apurada dos resul
tados obtidos.

96
As caracter!sticas geométricas estão descritas na
Figura (4.11) e os diagramas caracterfsticos das propriedades
ffsicas do material encontram-se na Figura (4.12), onde conside
rou-se o comportamento elasto-plástico perfeito (A= O) e c o m
"strain hardening" (A=O. lE). Utilizando-se da solução incre
mental, a carga distribu!da foi aplicada em incrementes de 2,5
psi até atingir 57,5 psi. O critério de plasticidade conside
rado foi o de Huber-Mises.
As curvas de deflexões máximas para o material ela~
to-plástico perfeito e com "hardening" se encontram na Figura
(4.13), onde se pode notar a boa concordância entre os resulta
dos obtidos pelas duas análises.
Através de diagramas de deformada, Figura (4.14),
compara-se as soluções elástica e elasto-plástica perfeita para
os dois tipos de análise com p = 57,5 psi.
Por fim, uma esquematização dos pontos de integr~
çao plastificados é mostrada na Figura (4.15) para p = 57,5 psi.

1, \ \
\
9011
p
\ R • 4.758" \
\ \
\ \ ~
FIGURA 4.11
(t p SI
y
FIGURA 4.12
97
y
Características geométricas.
H • 0,1 E
i/ • 0,33
Y • 10 X 1 0 3 p Si
Propriedades físicas, curvas
tensão-deformação.
X
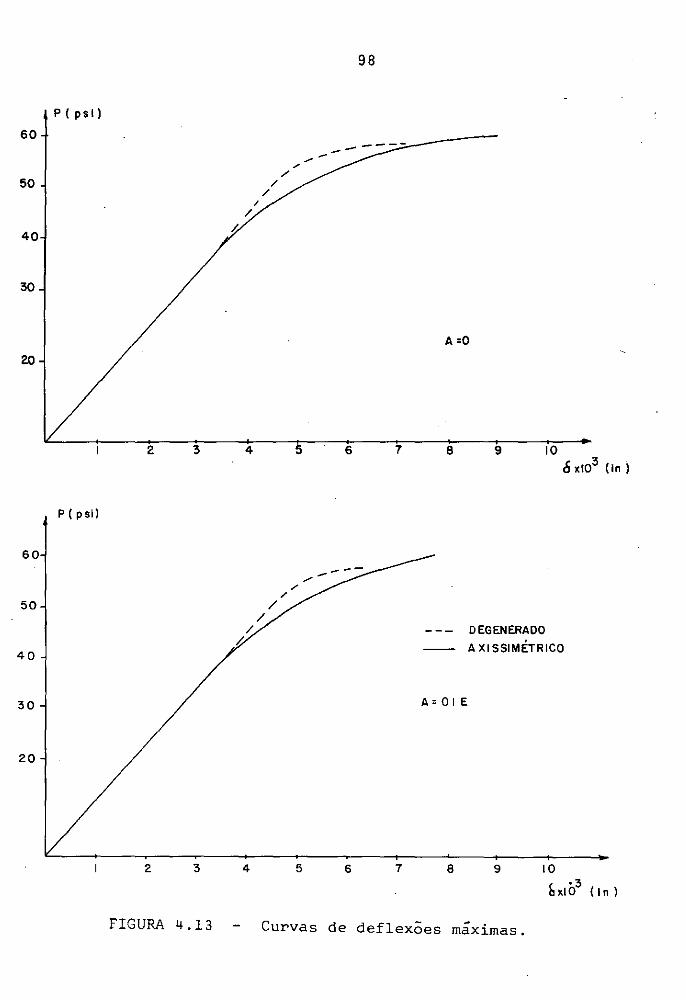
P ( ps 1)
60
50
40
30
20
2 3
P ( psi l
60
50
40
30
20
2 3
FIGURA 4.13
I /
/,
4
/ /
/
/
/ /
/ /,
4
/
5
/ /
5
6
6
98
A =O
7 8 9 10
c5 x'I03 ( in )
DEGENERADO
A XI SSIMÉTRICO
7 8 9 10
~.ici3 (ln)
Curvas de deflexões máximas.

99
l
2 / /
/
/ /
/
/
;,"' /
3 ELAST1co ____ _
4
-5 ---
FIGURA 4.14
-.___ ELASTO - PLASTICO
AXISSI MÉTRICO
DEGENERADO
Deflexões ao longo do raio para
p = 57,5 psi

100
SUPERIOR INFERIOR
FIGURA 4.15 Pontos de integração plastificados.
4.4 PLACA CIRCULAR
Procurando comparar alguns resultados práticos com
os obtidos teoricamente, analisou-se o comportamento elasto
-plástico de uma placa circular de alumínio 6061-T6 cujas cara~
terísticas geométricas e do carregamento são descritas esquema
ticamente na Figura 4.16. O modelo estrutural aproximado, id~
alizado por Witmer (18) e utilizado nesta análise tem sua geom~
tria representada na Figura 4.17a. Em sua análise Witmer fez
uso de elementos finitos de casca de revolução sendo que o car

101
regamente foi aproximado por uma série de Fourier com nove har
mônicos.
Por não se tratar de um carregamento axissimétrico
o modelo foi analisado com uso de elementos finitos degenerados
cuja discretização segue o da Figura 4.17b. As propriedades fi
sicas características da liga estão definidas no diagrama tensão
deformação da Figura 4.18. O critério de plasticidade consid~
rado foi o de Huber-Mises e utilizando-se do método incremental
para solução do sistema de equações o carregamento solicitante
foi aplicado em incrementas de 1.000 lbs.
As deflexões centrais para todos os valores de car
ga analisados comparadas com os resultados experimentais e os
obtidos por Witmer foram plotados na Figura 4.19. Uma compar~
çao entre o comportamento elástico e o elasto-plástico, através
dos diagramas de deflexões ao longo do raio para e= oº e e=
= 90° é ilustrada na Figura 4.20. O efeito da redistribuição
de tensões devido a não-linearidade é caracterizado pelos d ia
gramas de momentos M segundo 9 = oº para a solução elástica X
e elasto-plástica, Figura 4.21. Finalmente a indicação dos
pontos de integração plastificados para P = 9.000 lbs é feita
através da Figura 4.22.

FIGURA 4.16
102
9 011
5 oº
Características geométricas do modelo
analisado em laboratório.

0,2 ~· ~ 1!1 -k-A-=
~· 1,d'
FIGURA 4.17
10 3
l l ! 2,511 AÁ
y ............ 0,34'
b)
a)
Características geométricas do modelo
aproximado e sua discretização.

104
TI I o o o C psi l 50
40
30
20
10
.EXIOOO
o 2 4 6 B 10 12 14
FIGURA 4.18 Diagrama tensão-deformação do material.

105
P(lbs)
IC:000
8000
EXPERIMENTAL
6000 WIT MER
ELEMENTO DEGENERADO
4000
2000
2 4 6 8 10 12
FIGURA 4.19 Curva carga por deflexões centrais.

0,10
O,OB
0,06
· 0,04
0,02
b [in)
' ELASTO- PLASTICO
' '
'
....
' '
ELASTICO
0,5
' ' ' '
FIGURA 4.20
'\ \
\
\
IP
\ \ ~
106
8 , Oº
8 , 90°
P, 9000 lbs
Deflexões ao longo do raio.
2,5 x,y

M(lbs. pol/pol)
-800
-600
-400
-200
200
. 400
6 00
800
107
Elosto- ptÔstico\
FIGURA 4.21 Diagrama de momentos M segundo X
e = oº

108
• •
FIGURA 4.22 Pontos de integração plastificados.

109
' CONCLUSÕES
O uso de elementos finitos isoparamétricos é uma e
ficiente aproximação de problemas não-lineares. Utilizando-se
dos tensores de deformações de Green ou Almansi para o estudo do
contínuo, as propriedades dos elementos isoparamétricos são di
retamente derivadas da teoria tridimensional, não sendo, porta~
to, a análise de grande deformações restrita a uma simples apr~
ximação de segunda ordem. Além da facilidade de discretização
de geometrias arbitrárias e da simplicidade de sua formulação,
vale ressaltar a conveniência destes elementos na análise elas
to-plástica. As propriedades que descrevem o comportamento de
um elemento são obtidas do estagp de tensão de cada ponto de in
tegração individualmente, permitindo um conhecimento preciso de
todo o domínio.
Para a resolução dos sistemas de equações não-linea
res diversas alternativas ocorrem e a escolha do algoritmo de
solução é feita em função do tipo de problema a ser analisado.

110
Na análise não-linear física o método incremental se -mostrou
bastante eficiente, sendo que para problemas de grandes deform~
çoes o melhor algoritmo é o de solução mista. Entretanto, qual
quer que seja o método de resolução utilizado, em cada incremen
to e em todas as iterações as forças não-balanceadas devem ser
computadas para evitar uma acumulação sucessiva de erros.
Embora nao seja usual a hipótese de estrutura atin
giro regime plástico, a necessidade de se implementar esquemas
numéricos adequados ao comportamento não-linear existe. A ava
liação de cargas de rutura de condições realísticas fornece uma
significativa e consistente estimativa de fatores de segurança.
O conhecimento da redistribuição de tensões resultantes do com
portamento não-linear é de extrema valia para o projeto de uma
eficiente, segura e bem proporcionada estrutura.
A degeneração de elementos isoparamétricos tridimen
sional se mostrou eficiente para a análise elasto-plástica de
estruturas de superfície, possibilitando que se estude cascas e
placas, delgadas ou espessas, com geometria e solicitações quai~
quer, nao se limitando portanto a problemas de simetria axial.
A solução da placa circular confrontada com os resultados exp~
rimentais é bastante significativa. Além disso, os resultados
da análise da casca esférica indicaram boa concordância com o
elemento isoparamétrico de sólido de revolução, apesar de se tra
tarem de duas aproximações distintas.

111
BIBLIOGRAFIA
1. MALVERN, L. E. : "Introduction to the Mechanics of a Conti
nuous Medium", Frentice-Hall Inc., 1969.
2. ZIENKIEWICS, O.C.; NAYAK, G.C.: "General Approach to Pro-
3.
blems of Large Deformation and Plasticity using Isopara-
metric Elements'', Wright-Patterson Air Force Base, 1971.
BATHE, K. L. ; WILSON, E. L. ; IDING, R. H. : "NONSAP A
Structural Analysis Program for Static and Dinamic Response
of Nonlinear Systems", Report UCSESM 711-3, Berkeley 19711.
11. ODEN, J. T. : "Fini te Elements of Nonlinear Continua",
McGraw-Hill, 1972.
5. ZIENKIEWICS, O. C. : "The Fini te Elements Method in Engineer
ing Science", McGraw-Hill, 1971.

6.
112
NAYAK, G.C.; ZIENKIEWICS, o.e.: "Elasto-Plastic Stress
Analysis. A Generalization for Various Constitutive Re
lations Incluing Strain Softening", International Journal
for Numerical Methods in Engineering, Vol. 5, 1972.
7. ISAACSON, E.: "Analysis of Numerical Methods", John Wiley
& Sons Inc., 1966.
8.
9.
10.
IRONS, B.M.; TUCK, R.C.: ''A version of the Aitken Acce-
lerator for Computer Iteration", International Journal for
Numerical Methods in Engineering, Vol. 1, 1969.
BERGAN, P.G.; CLOUGH, R.W.: "Convergence Criteria
Itera tive Processes", AIAA Journal, Vol. 10, n9 8.
for
ZIENKIEWICS, o.e.; TAYLOR, R.L.; TOO, J.M.: "Reduced In-
tegration Technique in General Analysis of Plates and
Shells", International Journal for Numerical Methods in
Engineering, Vol. 3, 1971.
11. HALBRITTER, A. L. : "Analisis de Cascaras Gruesas y Finas
con Elementos Tridimensionales", Tese de M.Sc., COPPE/UFRJ,
1974.
12. FUNG, Y. C. : "Foundations of Solid Mechanics", Prentice-
-Hall, N.J., 1965.

113
13. ARMEN, H.; LEVINE, N.S.; PIFKO, A.B.: ''Plasticity-Theory
and Finite Element Applications'', Nonlinear Analysis.
14. PRAGER, W.: "The Theory of Plastici ty: A Survey of Recent
Achievements", Proc. Instn. Medr., Engrs., Vol. 169, 1955.
15. DRUCKER, D.C.: "Plasticity, Structural Mechanics", Pro-
ceedings First Symposium on Naval Structural Mechanics,
Pergamon Press, 1960.
16. ZIENKIEWICS, o.e., NAYAK, G.C.; OWEN, D.R.J.: "Composite
and Overlay Models in Numerical Analysis of Elasto-Plastic
Continua", International Symposium on Foundation of Plas
ticity, Warsaw, 1972.
17. HAISLER, W.E.; STRICKLIN, J.A.; STEBBINS, F.J.: "Deve~,
lopment and Evaluation of Solution Procedures for Geometri
cally Nonlinear Structural Analysis by the Direct Stiffness
Method", AIAA/ASME, Structures, Dinamics and Materials Con
ference - Anahein, California, 1971.
18. WITMER, E.A.; KOTAUCHIK, J.J.: ''Progress Report on Dis
crete Element Elastic and Elastic-Plastic Analyses of
Shells of Revolution Subjected to Axisymmetric and Asymme
tric Loading", M.I.T., 1968.
19. LORANE: "Uma Linguagem Orientada para Análise Estrutural",
U.F.R.G.S., 1973.

114
20. HILL, R.: "The Mathematical Theory of Plasticity", Oxford
1950.
21. ODEN, J.T.: "Computation Methods 1.n Nonlinear Mechanics",
Ticon 1974.
22. BREBIA, C.A.; FERRANTE, A.J.: "The Finite Element Tech
nique'', U.F.R.G.S., 1975.
23. COOK, R.D.: ''Concepts and Application of Finite
Analysis", John Wiley, 1974.
Element
24. YAMADA, Y.; YOSHIMURA, N.; SAKURAI, T.: "Plastic Stress
Strain Matrix an its Application for the Solution of Elas
tic-Plastic Problems by the Finite Element Method", Inter
national Journal of Mechanics Sciences, Vol. 10, 1968.
2 5. POPOV, E. P. ; KHOJASTEN-BAKHT, S. : "Analysis of Elastic
Plastic Circular Plates", ASCE, Vol. 93, EM6, 1967.
26. VENANCIO, F.: "Análise Matricial de Estruturas", Almeida
Neves, 1975.
2 7. ODEN, J. T. : "Numerical Formulation of Nonlinear Continua",
ASCE 93, ST3, 1967.
28. BREBBIA, C.; CONNOR, J.J.: ''Fundamentals of Finite Ele
ment Technique", Butterworths, 1973.

29.
115
LANDAU, L.; EBECKEN, N.F.F.: ''Análise Nio-Linear de Es
truturas de Superfície por Meio de Elementos Finitos Tridi
mensionais Degenerados", Jornadas Sul-Americanas de Enge
nharia Civil, Caracas, Venezuela, 1975.
30. LANDAU, L.; WROBEL, L.C.; EBECKEN, N.F.F.: "Análise Ela~
to-Plástica de Estruturas de Superfície", Colóquio Franco-
Brasileiro sobre Métodos Numéricos em Engenharia,
UFRJ, 1976.
COPPE/

cr ij
u i
X i
X i
N
ô
116
SIMBOLOGIA
tensor de deformações Lagrangeanas, tensor de Green.
tensor de deformações Eulerianas, tensor de Almansi.
tensor de tensões de Cauchy.
19 tensor de tensões Piola-Kirchhoff.
29 tensor de tensões Piola-Kirchhoff.
deslocamentos em um ponto do elemento.
coordenadas materiais.
coordenadas espaciais.
matriz Jacobiana.
matriz das funções de interpolação.
deslocamentos nodais.

B, B
~' R -
t, 1/J
KT
IIY li
~' D -Ç! j
n, 1; '
ªe.e.'
I;
y
117
matriz que relacione as deformações específicas com
os deslocamentos nodais, formulação Lagrangeana e
Euleriana.
forças equivalentes nodais.
forças residuais.
matriz de rigidez tangente.
norma de deslocamentos.
matriz das propriedades físicas do material.
tensor de deformações de Jaumann.
coordenadas naturais.
tensão de escoamento.