Embed Size (px)
Citation preview

Vectores en el
plano cartesiano
TrigonometríaSJL - UNI
Página 2
Introducción
Para describir el desplazamiento de un cuerpo, se requiere de dos números: la magnitud y la dirección del desplazamiento. Para describir la velocidad de un objeto en movimiento, debemos especificar la rapidez y la dirección de viaje. Cantidades como desplazamiento, velocidad, aceleración y fuerza que comprenden magnitud y dirección se denominan cantidades dirigidas. Una forma de representar matemáticamente tales cantidades es por medio del uso de vectores.

TrigonometríaSJL - UNI
Página 3
Vectores en el plano cartesiano.
Ciertas cantidades están determinadas completamente por su magnitud, por ejemplo longitud, masa, volumen, etc. Hablamos de una longitud de 5m o una masa de 3 kg; sólo es necesario un número para describir cada una de estas cantidades llamadas Escalares.
Por otra parte, para describir el desplazamiento de un cuerpo, se requiere de dos números: la magnitud y la dirección del desplazamiento. Para describir la velocidad de un objeto en movimiento, debemos especificar la rapidez y la dirección de viaje. Cantidades como desplazamiento, velocidad, aceleración y fuerza que comprenden magnitud y dirección se denominan Cantidades Dirigidas o cantidades Vectoriales.
Definición
Un vector es un segmento dirigido que tiene un punto inicial y punto final, nos indica una magnitud y una dirección.
AB=���
v
A
B
La longitud del segmento de recta AB recibe el
nombre de modulo o norma denotado por AB���
Cuando el punto de inicio es el origen de
coordenadas al vector AB���
se le llama Vector Posición o Radio Vector.
Un vector se denota analíticamente mediante un par ordenado de la forma:
1 2(v ;v )=v
v
1v
2v
Donde:
1
2
v : Componente horizontal
v : Componente vertical
Módulo y dirección de un vector.
Si un vector es 1 2(v ;v )=v definimos:
El Módulo o norma: Es la medida de longitud del vector o del segmento dirigido
2 21 2(v ) (v )= +v
La Dirección de un vector: Es la medida del ángulo θ formado por el vector y el semieje positivo OX
0 2( )θ π≤ <
v
1v
2v
θ
v
TrigonometríaSJL - UNI
Página 4
Nota:
Un vector tiene una magnitud y una dirección, pero no tiene una ubicación fija en el plano cartesiano, se les dice “vectores libres” es decir pueden ser ubicados en cualquier posición del plano tal como se ve en la siguiente figura:
v
1v
2v
v
1v
2v
v
1v
2v
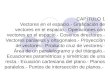
Ejemplo:
Determine el modulo y la dirección de los siguientes vectores:
2 2 3 3 3 3 4( ; ), ( ; ) y ( ; )= = = −u v w
Sol.
Los módulos son:
2 2
2 2
2 2
2 2 2 2 2 2
3 3 3 3 3 3 6
3 4 3 4 5
( ; ) ( ) ( )
( ; ) ( ) ( )
( ; ) ( ) ( )
= → = + =
= → = + =
= − → = − + =
u u
v v
w w
Las direcciones son
22 2 45
2
3 33 3 3 60
34 4
3 43 3
( ; ) : tan
( ; ) : tan
( ; ) : tan arctan( )
α α
β β
θ θ
°
°
= = → =
= = → =
− −= − = → =
u
v
w
Graficamos los vectores:
u
2
2
v
3
3 3
w
3−
4θ
β
α
Obsérvese que los vectores son ubicados en cualquier posición del plano
Operaciones con vectores
Las dos operaciones básicas con vectores son la multiplicación por un escalar y suma de vectores.
Definición
1 2 1 2
1 2
1 1 2 2
Sean (u ;u ) y (v ;v ) vectores y k R
entonces
El multiplo escalar es :
k. (kv ;kv )
El vector suma es :
(u v ;u v )
= = ∈
=
+ = + +
u v
v
u v
Cuando se multiplica un vector por un escalar el vector resultante es paralelo al vector original

TrigonometríaSJL - UNI
Página 5
v
2.v
−v1
.2v
Paralelismo de vectores:
Definición
Dos vectores yu v son paralelos si uno de ellos
es múltiplo real del otro.
si y solo si k. ; k R= ∈�u v u v
Para obtener el vector suma +u v
geométricamente trasladamos los vectores yu v
de forma paralela hasta formar un paralelogramo o un triángulo, siendo la diagonal el vector suma.
v
u
v
u
+u v
Resta de vectores:
Sean y vectores entonces
El vector resta es :
( )
Re sulta ser la suma del vector con
el vector
− = + −
−
u v
u v u v
u
v
v
u
v
u −u v
Nota:
Si un vector está representado por el punto inicial A y punto terminal B, entonces el vector puede ser descrito en base a los radios vectores de la siguiente forma.
AB=���
v
A
B
OA OB
A B
AB B A
+ =+ =
∴ = = −
��� ���
���
v
v
v
También es posible escribir de la siguiente forma:
B A
B A
= −→ = +v
v
TrigonometríaSJL - UNI
Página 6
Teoremas:
0
0
Sean , y vectores y k R entonces
( ) ( )
( )
k.( ) k . k .
k . k .
∈+ = ++ + = + +
+ =+ − =
+ = +=
u v w
u v v u
u v w u v w
u u
u u
u v u v
v v
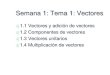
Ejemplo:
Determine la suma vectorial de
2 8 4 2 2 4( ; ), ( ; ) y ( ; )= = = −u v w
Sol.
2 8
4 2
2 4
2 8 4 2 2 4
2 4 2 8 2 4
8 6
( ; )
( ; )
( ; )
Entonces
( ; ) ( ; ) ( ; )
( ; )
( ; )
=== −
+ + = + + −+ + = + + + −+ + =
u
v
w
u v w
u v w
u v w
Geométricamente el vector suma es un vector resultante
u
2
8
v
4
2
w 4−
2
= + +r u v w
Ejemplo:
Demuestre que el punto medio de un segmento AB está determinado por
2
+= A BM
AM
B
Sol.
A
M
B
De la figura si M es punto medio entonces:
2
2
2 2
2
2
AB AM
( )
=− = −− = −+ =
+∴ =
��� ����
B A M A
B A M A
A B M
A BM

TrigonometríaSJL - UNI
Página 7
Ejemplo:
Demuestre que las coordenadas del baricentro de un triángulo ABC está determinado por
3
+ += A B CG
A
B
C
Sol.
A
B
C
M
G2a
a
De la figura, trazamos la mediana AM , donde G es el baricentro del triángulo ABC
3 2
2 3
2 3
2 3
2 32
3
AM AG
a a
AM AG
( ) ( )
( )
=
=− = −
+ =+ + =
+ +∴ =
���� ����
���� ����
M A G A
M A G
B CA G
A B CG
TrigonometríaSJL - UNI
Página 8
Vectores unitarios
Un vector u es unitario si su longitud es igual a 1,
es decir 1=u
1 2
1 22 2
Sea el vector unitario del vector entonces
(v ;v )
(v ) (v )= =
+
u v
vu
v
v
u
Obsérvese que el vector unitario u es paralelo al vector v
Un vector unitario u se representa en función del ángulo de inclinación o ángulo de dirección θ según:
u
1u
2u
θ
1=u
u
1u
2uθ
1(cos ;sen );θ θ= =u u
De lo anterior se sigue que todo vector 0; ≠v v
se puede representar
( )
(cos ; sen )θ θ
=
= =
vv v
v
v v u v
Nota:
Los vectores unitarios paralelos a los ejes coordenados son ,i j
1 0
0 1
( ; )
( ; )
==i
j
(0;1)=j
1 0( ; )=i
Estos vectores unitarios se utilizan para representar cualquier vector como una combinación lineal de la siguiente forma:
1 2
1 2
1 2
1 0 0 1
(v ;v )
v ( , ) v ( , )
v . v .
== += +
v
v
v i j
Ejemplo:
Determine los vectores unitarios de los siguientes vectores:
3 4 2 2 3( ; ), ( ; )= − =A B
Sol.
2 2
2 2
3 4 3 4 5
3 4
5
2 2 3 2 2 3 4
2 2 3
4
A
B
( ; ) ( ) ( )
( ; )
( ; ) ( ) ( )
( ; )
= − → = − + =−→ = =
= → = + =
→ = =
A A
Au
A
B B
Bu
B

TrigonometríaSJL - UNI
Página 9
Ejemplo:
Determine el vector unitario de la suma de los siguientes vectores
2 4
7 8
= − += +
A i j
B i j
Sol.
2 2
2 4
3 8
2 4 3 8
5 12
5 12 13
5 12
13A B
Sumamos :
( ) ( )
Entonces :
( ; )+
= − += − +
+ = − + − ++ = − +
+ = − + =
+ −= =+
A i j
B i j
A B i j i j
A B i j
A B
A Bu
A B
TrigonometríaSJL - UNI
Página 10
Producto escalar o producto punto
entre vectores
1 2 1 2Sean (u ;u ) y (v ;v ) vectores
entonces definimos el producto punto :
= =u v
1 1 2 2u v u v= +u.v
Teoremas:
2
2 2 22
Sean , y vectores y k R entonces
( )
k( ) ( k ). (k )
.
∈=+ = +
= =
=
± = ± +
≤
+ ≤ +
u v w
u.v v.u
u. v w u.v u.w
u.v u v u. v
v.v v
u v u u.v v
u.v u v
u v u v
Ejemplo:
Demuestre que
2 2 22± = ± +u v u u.v v
Sol.
2
2
2 222
( ).( )
. .
.
+ = + +
+ = + + +
+ = + +
u v u v u v
u v u.u u v v u v.v
u v u u v v
Ángulo entre dos vectores
v
uθ
Sea el ángulo entre dos vectores y
entonces :
θ u v
cosθ = u.v
u v
senθ⊥
= u .vu v
u
v
θu
v
θ
u
v
θu
v
02
0 1cos
πθ
θ
< <
< <2
0cos
πθ
θ
=
=
21 0cos
π θ π
θ
< <
− < <
0
1cos
θθ
==

TrigonometríaSJL - UNI
Página 11
Ejemplo:
Demuestre que el ángulo entre dos vectores ,u v
se determina con
cosθ = u.v
u v
Sol.
v
u
θ
−v u
De la figura, mediante el teorema de cosenos tenemos:
2
2
2
2
2 2
2 2
2
2
2
2
2 2
2 2
cos ....( I )
También
. ............( II )
De (I ) y ( II ) :
. cos
. cos
Entonces :
cos
θ
θθ
θ
− = + −
− = − +
− + = + −
− = −
=
v u v u v u
v u v u v u
v u v u v u v u
u v v u
u.v
u v
TrigonometríaSJL - UNI
Página 12
Ortogonalidad de dos vectores:
Definición:
Dos vectores yu v son ortogonales o
perpendiculares si se verifica:
+ = −u v u v
Teorema:
0
Dos vectores y son Ortogonales
si y solo si⊥ =u v
u v u.v~
Vector Ortogonal:
Sea el vector 1 2(v ;v )=v definimos el vector
ortogonal 2 1( v ;v )⊥ = −v
Entre ambos vectores se verifica que
1 2 2 1
1 2 2 1 0
0
(v ;v ).( v ;v )
v v v v
⊥
⊥
⊥
= −
= − + =
∴ =
v.v
v.v
v.v
Geométricamente el vector ⊥v se representa
mediante una rotación de 90° en sentido antihorario con respecto al vector original
v
1v
2v
2v−
1v
⊥v
Teoremas:
Sean y vectores entonces
( )
.
)
.
⊥ ⊥ ⊥
⊥ ⊥
⊥ ⊥
⊥ ⊥
⊥
+ = += −= −
=
=
u v
u v u v
u.v u v
(v v
u .v u v
v v
Ejemplo:
Del gráfico mostrado determine las coordenadas de los puntos B y C
2 0A( ; )−
B
C
37°
10
5
Sol.
Consideramos el vector unitario u paralelo al
segmento AB
u
2 0A( ; )−
B
C
37°
10
5
⊥u

TrigonometríaSJL - UNI
Página 13
4 337 37
5 53 4
37 375 5
10
4 32 0 10 6 6
5 5
5
3 46 6 5 3 10
5 5
(cos ;sen ) ( ; )
( sen ;cos ) ( ; )
El punto B es :
.
( ; ) .( ; ) ( ; )
El punto C es :
.
( ; ) .( ; ) ( ; )
° °
⊥ ° °
⊥
= =
= − = −
= +
= − + =
= +
= + − =
u
u
B A u
B
C B u
C
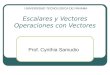
Ejemplo:
Del gráfico mostrado ABCD es un rectángulo de
lados 3 10 2 10; determine las coordenadas de
los puntos B y D
A
B
C
D
3 1( ; )
Sol.
A
B
C
D
3 1( ; )
u⊥u
2 10
3 10
Consideramos el vector unitario u paralelo al
segmento DC
2 2
3 1 3 1
103 1
1 3
10
3 10
3 10 0 3 10
100 0 9 3 9 3
2 10
1 30 0 2 10
100 0 2 6 2 6
( ; ) ( ; )
( ) ( )
( ; )
El punto B es :
( ; )( ; ) .
( ; ) ( ; ) ( ; )
El punto D es :
.
( ; )( ; ) .
( ; ) ( ; ) ( ; )
⊥
⊥
= =+
−=
= +
= +
= + =
= +−= +
= + − = −
u
u
B A .u
B
B
D A u
D
D
Ejemplo:
Dado un vector 3 4( ; )=a determine un vector b
tal que 20y⊥ =a b, b
Sol.
3 4 4 3
20
20
5 20 4
4 4 3
16 12
Del dato :
( ; ) ( ; )
Como entonces :
k .
k .
k
k( ) k
Entonces :
k . ( ; )
( ; )
⊥
⊥
⊥
⊥
⊥
= → = −⊥
=
= =
= =
= → =
= = −∴ = −
a a
a b
b a
b a
b a
b a
b
TrigonometríaSJL - UNI
Página 14
Proyección ortogonal de un vector
sobre otro
Un vector v se puede expresar mediante una
combinación lineal de los vectores y ⊥u u
s. r . ; r ,s R⊥= + ∈v u u
v
u .s u
.r ⊥u
El vector s.u recibe el nombre proyección
ortogonal de v sobre u y se denota: Proyu v
2
2
2
2
0
0
De : s. r . ; r ,s R
Calculamos r y s :
. s. r . .
. s. r .( )
.s
De forma similar
s. r .
s. r .
r .
.r
⊥
⊥
⊥
⊥ ⊥ ⊥ ⊥
⊥ ⊥
⊥
⊥
= + ∈
= +
= +
→ =
= += +
= +
→ =
v u u
v u u.u u u
v u u
v u
u
v u u
v.u u.u u u
v.u u
v u
u
La proyección ortogonal de sobrev u es
2
Proy s.
.Proy ( ).
=
=
u
u
v u
v uv u
u
Si hacemos
.Proy ( ).=u
v u uv
u u
El factor que acompaña al vector unitario se conoce con el nombre de componente de v en u o también componente de v en la dirección de u que nos indica la longitud del vector proyección
.Comp ( )=u
v uv
u
La proyección ortogonal de sobre ⊥v u es
2
Proy r .
.Proy ( ).
⊥
⊥
⊥
⊥
⊥
=
=
u
u
v u
v uv u
u
Nota:
Otra forma de obtener las componentes horizontal y vertical de la proyección de un vector sobre otro es utilizando el ángulo que forma ambos vectores según:
v
u cosθv
⊥u
θ
senθv
De la figura:

TrigonometríaSJL - UNI
Página 15
Comp cos
Comp ( )
Comp ( )
También :
Comp sen
Comp ( )
Comp ( )
θ
θ⊥
⊥
⊥
⊥
⊥
=
=
→ =
=
=
→ =
u
u
u
u
u
u
v v
u.vv v
u v
u.vv
u
v v
u .vv v
u v
u .vv
u
Área de una región triangular con
vectores
Sea los vectores yu v entonces el área de la
región triangular es :
v
u
.r ⊥u
2
2
2
1
21 1
2 2
1
2
1 1
2 2
A (base )(altura )
A ( )( r ) ( )( r )
.A ( )( )
A . .
⊥
⊥
⊥
⊥ ⊥
=
= =
=
∴ = =
u u u
v uu
u
v u v u
TrigonometríaSJL - UNI
Página 16
Ecuación vectorial de la recta
Sea u un vector que es paralelo a la recta L
0P
u
L
P
⊥u
La ecuación de la recta en forma vectorial es:
0P P t.= + u
Donde:
0
1 2
P : Puntode paso de la recta
t R
(u ;u ) : vector direccional
∈=u
Ejemplo:
Determine la ecuación vectorial de una recta si pasa por los puntos 1 3 2 7A( ; ) y B( ; )
Sol.
Consideramos un punto de paso
0 1 3P A( ; )=
El vector direccional es:
0
2 7 1 3 1 4
1 3 1 4
AB B A
( ; ) ( ; ) ( ; )
Entonces :
P P t.
P ( ; ) t .( ; )
= = −= − =
= +∴ = +
���u
u
u
Ecuación general de una recta
La ecuación general de una recta es deducida en base al vector normal o perpendicular a la recta.
0P
u
L
P
⊥u
Si 0P y P pertenecen a la recta L entonces
0
0
0
0
0
0
0
(P P ).
P. P .
P. P .
Sea (a;b ) entonces
( x; y ).(a;b ) P .
ax by c
ax by c
⊥
⊥ ⊥
⊥ ⊥
⊥
⊥
− =
− =
=
==
+ = −∴ + + =
u
u u
u u
u
u
De esta última ecuación notamos que si tenemos la ecuación general de la recta inmediatamente podemos conocer el vector normal a la recta.
Ejemplo:
Determine la ecuación vectorial de una recta si su ecuación general es:
3 4 12 0x y+ − =
Sol.
De los coeficientes de la ecuación general deducimos el vector normal o perpendicular a la recta

TrigonometríaSJL - UNI
Página 17
3 4 12 0
3 4 4 3
L : x y ......( I )
El vector normal es :
( ; ) ( ; )⊥
+ − =
= → = −u u
Obtenemos un punto de paso de la recta tabulando un valor arbitrario en la ecuación (I)
0
0 3
0 3
Si x y
P ( ; )
= → ==
La ecuación vectorial de la recta es:
0
0 3 4 3
P P t.
P ( ; ) t .( ; )
= +∴ = + −
u
0P
u
L
P ⊥u
Distancia de un punto a una recta
Consideremos el vector u y su respectivo vector
ortogonal ⊥u
0P
u
L
1 1Q( x ; y )
⊥ud
s
0
0
0
1 1 0
1 1
2 2
Ladistancia d es :
d Comp (P Q )
P Q.d
Q. P .d
( x ; y ).(a,b ) P .d
ax by cd
a b
⊥
⊥
⊥
⊥ ⊥
⊥
⊥
⊥
=
=
−=
−=
+ +=+
����
����u
u
u
u u
u
u
u