-
Upravljački prometni sustavi
Predviđanje prometnih parametara
Izv. prof. dr. sc. Niko JelušićDoc. dr. sc. Edouard Ivanjko
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Sadržaj
– Uvod
– Prometni pokazatelji
– Ocjena točnosti
– Parametarski modeli
– Neparametarski modeli
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Zahtjev za proaktivno, a ne reaktivno djelovanje
• Kvalitetno upravljanje često zahtjeva poznavanje jedne ili
više procesnih veličina
– Mjerenje
– Procjena (engl. “estimation”)
– Predviđanje
• Procjena i predviđanje zahtijevaju model
– Analitičko modeliranje
– Učenje modela
• Mjerni podaci ulaznih i izlaznih varijabli
• Ocjena kvalitete
Uvod
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Opisuju prometni tok vozila
– Primjena na različite prometne mreže
– Različiti modovi prometa
• Pod utjecajem prometnih parametara
– Osim prometnih pokazatelja mijenjaju obrasce ponašanja
prometa
• Prometni parametri mjerljivi no izvan utjecaja
– Prometna mreža, meteorološko vrijeme, postotak pojedine vrste
vozila, vrijeme unutar dana, dan ili sezona unutar godine,
karakteristike prometnice
Prometni pokazatelji
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Cestovna prometna mreža
– Protok vozila: q [voz/h]
– Gustoća prometnog toka: g, [voz/km]
– Brzina prometnog toka: v [km/h]
– Vrijeme putovanja vozila u toku: t [s]
– Jedinično vrijeme putovanja vozila u toku [s]
– Vremenski interval slijeđenja vozila u toku: th [s]
– Razmak slijeđenja vozila u toku: s [m]
Prometni pokazatelji
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Model daje procjenu (estimaciju) ili predviđanje
• Izgradnja modela iz mjernog skupa
• Pogreška (reziduom)
• Relativna pogreška
• Standardizirana pogreška
Ocjena točnosti
,i iy x ˆi iy f x
,
ˆ100%
i i
i rel
i
y ye
y
ˆi i ie y y
,
ˆi i
i
y
y ye
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Pojedini iznos pogreške ne daje pravu sliku za cijeli skup
podataka
– Promatra se točnost za cijeli skup podataka
• Varijanca
• Koeficijent varijacije
• Koeficijent determinacije
– Skup vrijednosti [0,1]
Ocjena točnosti
22
ˆ
1
1ˆ
n
y i i
i
y yn
ˆ
ˆ 100y
yVy
2
1
2
1
ˆn
i
i
n
i
i
y y
r
y y
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Predefenirana struktura modela
• Poznat broj parametara
• Cjelokupno znanje o procesu se ugrađuje u model
• Primjer
– Regresija
– Kalmanov filtar
Parametarski modeli
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Regresijski model predstavlja matematičku funkciju kojom se
opisuje zavisnost jedne (zavisne) varijable o jednoj ili više
nezavisnih varijabli
• Podjela
– Linearna -> aproksimacija pravcem
– Nelinearna (svode se na linearnu)
• Eksponencijalna
• Multiplikativna
• Logaritamska
• Recipročna
Parametarski modeli Regresija
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Linearna regresija
– Skup podataka
– Model
– Izračun koeficijenata metodom najmanjih kvadrata
– Analogno proširenje na ovisnost o više varijabli
Parametarski modeli Regresija
,i iy x
0 1ˆ
i i iy b b x e
11
2 2
1
n
i i
i
n
i
i
x y nx y
b
x nx
0 1b y b x
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Nelinearna regresija – eksponencijalna
– Model
– Svođenje na linearnu regresiju
– Izrazi koeficijenata za linearnu regresiju daju logaritme
koeficijenata eksponencijalne regresije
Parametarski modeli Regresija
0 1ˆ ix
i iy b b e
0 1ˆlog log log 'i i iy b b x e
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Nelinearna regresija – logaritamska
– Model
– Svođenje na linearnu regresiju
– Izrazi koeficijenata
Parametarski modeli Regresija
0 1ˆ logi i iy b b x e
' logi ix x
1
2 2
1
n
i i
ii n
i
i
x y nx y
b
x nx
0 1b y b x
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Nelinearna regresija – recipročna
– Model
– Svođenje na linearnu regresiju
– Izrazi koeficijenata
Parametarski modeli Regresija
0 1
1ˆ
i i
i
y eb b x
1'i
i
yy
1
2 2
1
'n
i i
ii n
i
i
x y nxy
b
x nx
0 1b y b x
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Zasniva se na činjenici da kombinacija dvije vrijednosti
određene točnosti iste fizikalne veličine daju vrijednost veće
točnosti
• Primjer
Izmjerene su vrijednosti temperature prometnice
T1 = 19,00 +/- 2,00 oC
T2 = 18,00 +/- 2,50 oC
T3 = 19,00 +/- 1,00 oC
Točna konačna vrijednost?
Točnost konačne vrijednosti?
Parametarski modeli Kalmanov filtar
3
21
3
21
18,891
i
i oi
i i
T
T C
3
21
10,84
1
o
i i
C
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
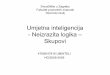
• Dva koraka rada uz učenje u matrici kovarijanci pogreške
Parametarski modeli Kalmanov filtar
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Nelinearni procesi -> linearizacija
Parametarski modeli Kalmanov filtar
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Struktura i broj parametara modela nepoznat
– Proces učenja na osnovu mjernih podataka
• Dobro modeliranje dinamičkih i nestacionarnih procesa
• Primjer
– Bayes-ove mreže
– Neizrazita logika
– Neuronske mreže
Neparametarski modeli
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Osnova Bayes-ovo pravilo
– Uvjetna vjerojatnost da se desio događaj A ukoliko se desio
događaj B
• Pravila zaključivanja o hipotezi H uz činjenice E
– p(H) prethodna vjerojatnost da je H istinito
– p(E|H) vjerojatnost pronalaženja E kada je H istinito
– p(¬H) prethodna vjerojatnost da je H neistinito
– p(E| ¬H) vjerojatnost pronalaženja E i kada je Hneistinito
Neparametarski modeli Bayes-ove mreže
( | ) ( )( | )
( )
p B A p Ap A B
p B
)()|()()|(
)()|()|(
HpHEpHpHEp
HpHEpEHp
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Graf uzroka i posljedice
– T -> vrijeme
– H -> dan praznik
– V -> vidljivost
– R -> radovi
– C -> zagušenje
• Učenje tablica uvjetnih vjerojatnosti iterativno
Neparametarski modeli Bayes-ove mreže
, , , ,| , , ,
, , ,
p c t h v rp c t h v r
p t h v r
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Uvođenje neodređenosti, pristrane prosudbe
• Značenje -> Dolazim za pet minuta!
– Vrijeme čekanje 5 [min] tj. 300 [s]
– Vrijeme čekanja iz skupa vrijednosti oko 5 [min]
• Neizrazita varijabla
– Opisna vrijednost
– Numeričko područje
– Stupanj (funkcija) pripadnosti skupu
• Može pripadati više skupova
Neparametarski modeli Neizrazita logika
1,0: AxA
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
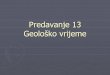
• Definira se neizrazita aritmetika
• Definicija pravila odlučivanja
Neparametarski modeli Neizrazita logika
2
1
0
6 10
oko 5
x4 80
oko 2 oko 3
Zbrajanje: “oko 2” + “oko 3”
x
AKO x je A I y je B ONDA z je C
pretpostavke, premise zaključak
x, y, z - neizrazite varijable
A, B, C - neizraziti skupovi, brojevi, izrazi
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Pravila odlučivanja i oblici funkcija pripadnosti
predstavljaju znanje o modelu
– Broj pravila velik
• Broj ulaznih varijabli
• Broj izlaznih varijabli
• Opisna vrijednost pojedine ulazne i izlazne varijable
– Konačna vrijednost doprinos više aktiviranih pravila
• Presjek (minimum) i unija (maksimum) pravila
– Općenito nisu potrebne sve kombinacije pravila
Neparametarski modeli Neizrazita logika
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Imitacija funkcija ljudskog mozga
• Umjetne neuronske mreže
– Učenje usporedbom sa točnim vrijednostima
– Podešavanje veza između neurona
– Univerzalni aproksimator
– Prilagodba promjenama
• Znanje spremljeno
– Struktura neuronske mreže
– Parametri neurona
Neparametarski modeli Neuronske mreže
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Matematički model neurona
Neparametarski modeli Neuronske mreže
n
i
iijj xwI1
)( jj Iy
Aktivacijska
funkcija j
Zbroj
opterećenih
ulaza Ij
JEZGRA
NEURON j
yj
x1
x2
xi
wij
SINAPSE -
TEŽINE
w1j
w2j
xn
wnjDENDRITI
AKSON
ULAZNI
SIGNALI
IZLAZNI
SIGNAL
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
• Struktura umjetne neuronske mreže
Neparametarski modeli Neuronske mreže
x1 xh xm
y1 yq yr
Izlazni sloj
Unutarnji
(skriveni)
sloj
Ulazni
(diobeni)
sloj
k-ti sloj
j-ti sloj
i-ti sloj
-
Upravljački prometni sustavi :: Predviđanje prometnih parametara
© 2017 Ivanjko, Jelušić
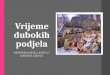
• Predviđanje toka vozila
– Ponovljiva veličina
• Radni dan, praznik, dan prije i dan poslije praznika
– Ulaz neuronske mreže
• Vrijeme unutar dana
• Vrsta dana
– Korelacija > 0,9
• Ovisi o kvaliteti
podataka za učenje
Neparametarski modeli Neuronske mreže
Gregurić, M., Ivanjko, E., Mandžuka, S., A
neuro-fuzzy based approach to cooperative
ramp metering, Proceedings of 2015 IEEE
18th International Conference on Intelligent
Transportation Systems, Canary Islands,
Spain 15 - 18 September 2015., pp. 54-59