Embed Size (px)
Citation preview

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 1/12
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL
FACULTAD DE INGENIERIA EN ELECTRICIDAD Y COMPUTACION
LABORATORIO DE CONTROL
PRE-PRÁCTICA
TÍTULO:
CONTROL DEL NIVEL DE UN TANQUE
ESTUDIANTE:
LUIS MALUSIN
FECHA:
17-08-2015

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 2/12
Control de Nivel de un Tanque
Para el modelo matemático de un tanque representado con las siguientes ecuaciones:
= 250 100
400 ℎ =
= 40√ℎ
Donde:
es el caudal de entrada al tanque en [3/s]
es el caudal de salida del tanque en [3/s]
es el voltaje de control del variador de frecuencia [V]
H es el nivel del agua en el tanque [cm]
a)
Calcular el punto de operación de las variables del sistema sabiendo que el nivel de
agua de operación es de 16[cm].
= 40 ℎ
= 40√ 16 = 160
0 =
= = 160
= 250 100
= 1.04
b) Linealice el sistema alrededor del punto de operación anterior
Sabemos que la ecuación tendrá una forma similar a:
ℎ ̇ = ℎ
Para obtener
derivamos
̇
:

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 3/12
ℎ ̇ = 250
400 = = 58
Para obtener derivamos ̇ :
ℎ ̇ℎ = (ℎ)−
10(2) = = 0.0125
Por ultimo mi ecuación lineal queda de la siguiente forma:
ℎ = 0.625 0.0125 ℎ
c) Obtenga la función de transferencia del sistema donde la salida es el nivel del
agua del tanque
Nuestra función de transferencia seria:
ℎ
= 5080 + 1
d)
Construya un modelo en Simulink que represente el sistema no lineal tomando en
cuenta los valores minimos que pueden tomar las variables del sistema y
e)
Simule la función de transferencia obtenida al aplicarle una entrada escalon de
magnitud 0.05.

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 4/12
Se grafican función no lineal y la lineal atravez de un mux que va a un solo scope.
f) Compare las repuestas del sistema linealizado con la del sistema no lineal alrededor
del punto de operación.

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 5/12
Las graficas empiezan con un retardo de 800s y se comportan como una grafica de primer
orden
g) Usando la herramienta sisotool desarrolle un controlador PI para la función de
transferencia encontrada:

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 6/12
Para los valores de dados de sobrenivel porcentual y tiempo de estabilización se crea
la grafica de raíz.

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 7/12
h) Simule el comportamiento del controlador obtenido en el literal en simulink usando el
modelo no lineal.
Con el aumento del controlador ahora poseemos un lazo cerrado para el cual
colocamos el punto de operación de h en la entrada además de agregar el punto de
operación del voltaje antes de la planta para asi dicha variable actue alrededor de su
punto de operacion
7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 8/12
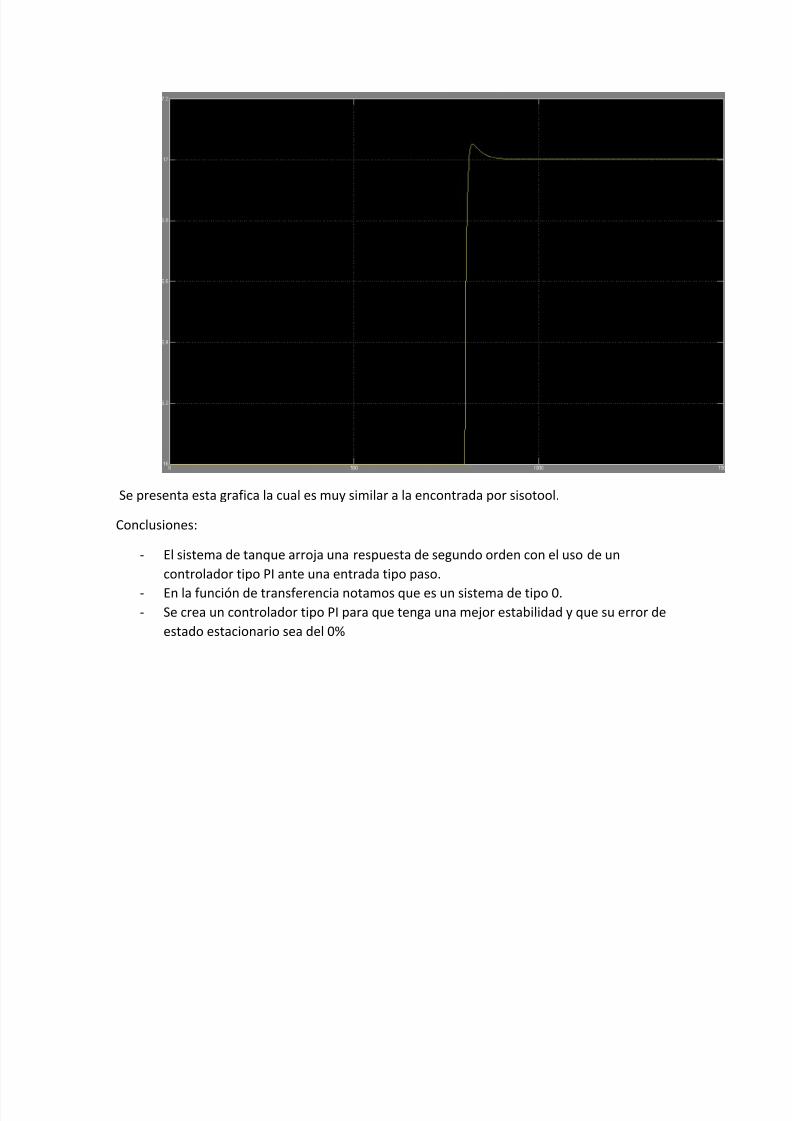
Se presenta esta grafica la cual es muy similar a la encontrada por sisotool.
Conclusiones:
-
El sistema de tanque arroja una respuesta de segundo orden con el uso de un
controlador tipo PI ante una entrada tipo paso.
-
En la función de transferencia notamos que es un sistema de tipo 0.
-
Se crea un controlador tipo PI para que tenga una mejor estabilidad y que su error de
estado estacionario sea del 0%

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 9/12
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL
FACULTAD DE INGENIERIA EN ELECTRICIDAD Y COMPUTACION
LABORATORIO DE CONTROL
PRE-PRÁCTICA
TÍTULO:
CONTROL DEL NIVEL DE UN TANQUE
ESTUDIANTE:
LUIS MALUSIN
FECHA:
17-08-2015

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 10/12
Motor
Usando sisotool diseñe un PID para la función:
Variamos las constantes del controlador para asi obtener la grafica deseada para las condicions
dadas por el problema.
7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 11/12
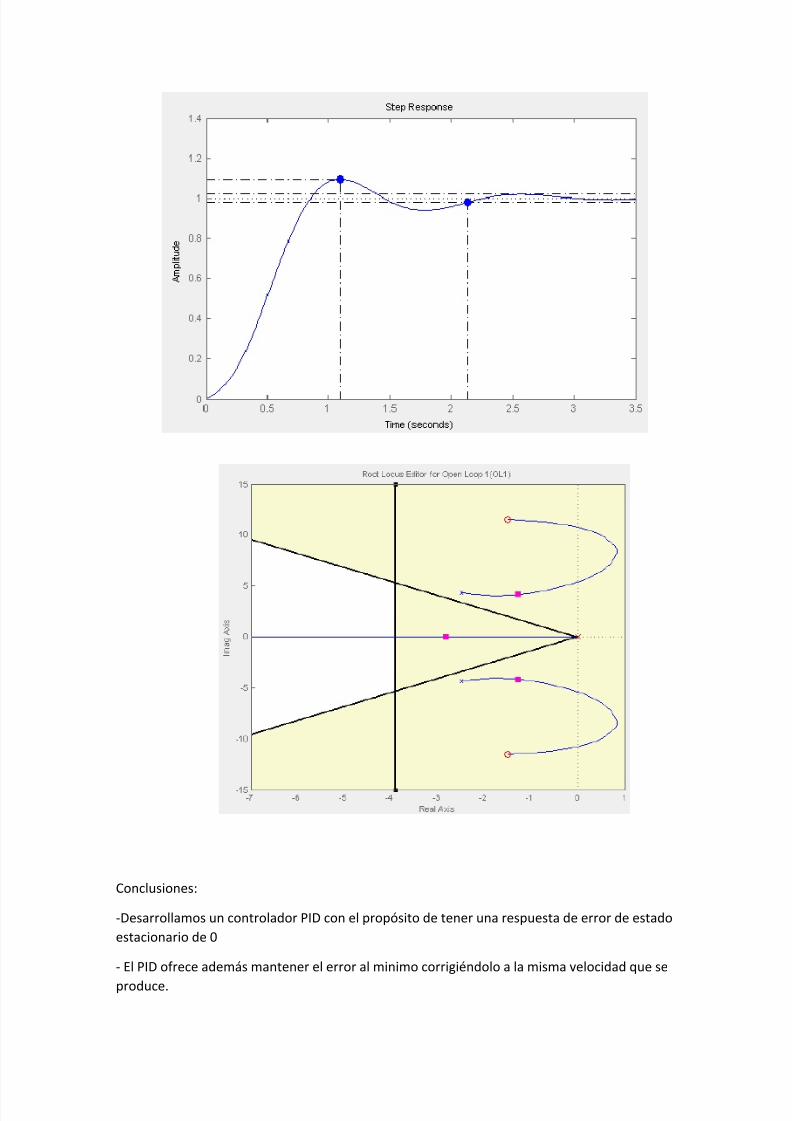
Conclusiones:
-Desarrollamos un controlador PID con el propósito de tener una respuesta de error de estado
estacionario de 0
- El PID ofrece además mantener el error al minimo corrigiéndolo a la misma velocidad que se
produce.

7/25/2019 Prepractica Control Tanque
http://slidepdf.com/reader/full/prepractica-control-tanque 12/12
- En la grafica de respuesta de entrada paso se ve la estabilidad de la función.
- En la grafica de raíces se ve el cruce por el eje imaginario y el hecho que la función posee
polos complejos.