Embed Size (px)
Citation preview
PRINCIPIOS SOBRE SEMÁFOROS
VÍCTOR GABRIEL VALENCIA ALAIX
UNIVERSIDAD NACIONAL DE COLOMBIA
SEDE MEDELLÍN
FACULTAD NACIONAL DE MINAS
Medellín, 2000.

ii
PRINCIPIOS SOBRE SEMÁFOROS
VÍCTOR GABRIEL VALENCIA ALAIX
Trabajo presentado como requisito parcial para aspirar a la categoría de profesor asociado.
UNIVERSIDAD NACIONAL DE COLOMBIA
SEDE MEDELLÍN
FACULTAD NACIONAL DE MINAS
Medellín, 2000.
iii
DEDICATORIA A mi madre quien me enseñó su cariño por la docencia y a mi padre de quien aprendí la honestidad en la vida, ingredientes que me acompañaron al hacer este trabajo. En segunda instancia dedico este documento a los usuarios, respetuosos y no, de los semáforos.
iv
TABLA DE CONTENIDO Página LISTA DE TABLAS xii LISTA DE FIGURAS xiii 1. INTRODUCCIÓN 1-1 1.1 DEFINICIÓN 1-1 1.2 FUNCIÓN 1-2 1.3 OBJETIVOS 1-2 1.4 NORMALIZACIÓN 1-2 1.5 AUTORIDAD LEGAL 1-3 1.6 DEFINICIONES SOBRE LOS SEMÁFOROS 1-4 1.7 CLASIFICACIÓN 1-8 2. REQUISITOS BASICOS PARA LA INSTALACIÓN DE
SEMÁFOROS 2-1
2.1 DATOS DE INGENIERÍA DE TRÁNSITO PRELIMINARES 2-1 2.2 REQUISITOS BÁSICOS PARA LA INSTALACIÓN DE
SEMÁFOROS 2-3
2.2.1 Requisito 1. Volumen mínimo de vehículos 2-4 2.2.2 Requisito 2. Interrupción del tránsito continuo 2-4 2.2.3 Requisito 3. Volumen mínimo de peatones 2-5 2.2.4 Requisito 4. Movimiento progresivo 2-5 2.2.5 Requisito 5. Accidentes 2-6 2.2.6 Requisito 6. Combinación de requisitos 2-6 2.2.7 Consideraciones especiales 2-6 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA EL
CONTROL DEL TRÁNSITO DE LOS VEHÍCULOS 3-1
3.1 ASPECTOS GENERALES 3-1 3.2 DISEÑO CON MIRAS AL FUTURO 3-1 3.3 VENTAJAS Y DESVENTAJAS DE LOS SEMÁFOROS 3-1 3.4 NÚMERO DE LENTES POR CARA DE SEMÁFORO 3-2 3.5 COLOR Y POSICIÓN DE LAS LENTES. 3-3 3.6 DISTRIBUCIÓN DE LAS LENTES EN LAS CARAS DE LOS
SEMÁFOROS 3-4
3.7 SIGNIFICADO DE LOS COLORES Y LAS FLECHAS 3-6 3.7.1 Con LUZ VERDE (exclusivamente). "SIGA". 3-6 3.7.2 Con luz AMARILLA FIJA. "TRANSICION". 3-7 3.7.3 Con luz ROJA (exclusivamente). "PARE". 3-7 3.7.4 Con luz en FLECHA VERDE de frente (exclusivamente). 3-8

v
3.7.5 Con luz en FLECHA VERDE de giro a la izquierda o a la derecha, sola o con luz en la lente verde, amarilla, roja fija o flecha de frente
3-8
3.7.6 Con luz ROJA intermitente (PARE obligatorio). 3-9 3.7.7 Con luz AMARILLA intermitente (precaución). 3-10 3.8 APLICACIÓN DE LOS COLORES Y FLECHAS 3-10 3.8.1 Rojo fijo 3-10 3.8.2 Amarillo fijo 3-10 3.8.3 Verde fijo 3-10 3.8.4 Las flechas VERDE, AMARILLA y ROJA fijas 3-10 3.8.5 Uso de las indicaciones de las flechas fijas 3-11 3.8.6 Combinaciones inadmisibles en las caras de los
semáforos 3-11
3.8.7 Operación intermitente 3-12 3.9 DISEÑO Y TAMAÑO DE LAS LENTES 3-12 3.10 LEYENDAS SOBRE LAS LENTES 3-13 3.11 ILUMINACIÓN DE LAS LENTES 3-13 3.12 VISIBILIDAD Y PROTECCIÓN DE LAS LENTES 3-14 3.13 UBICACIÓN Y NÚMERO DE CARAS DE LOS
SEMÁFOROS 3-14
3.14 SEÑALES AUXILIARES 3-21 3.15 ALTURA DE LAS CARAS DE LOS SEMÁFOROS
VEHICULARES 3-21
3.16 UBICACIÓN TRANSVERSAL DE LOS SOPORTES DE LOS SEMÁFOROS
3-23
3.17 LÍMITE DEL ÁREA REGULADA POR SEMÁFOROS 3-24 3.18 ELIMINACIÓN DE ANUNCIOS LUMINOSOS QUE
CONFUNDAN 3-24
3.19 EFICIENCIA Y CONTINUIDAD DE OPERACIÓN 3-24 3.20 CONFLICTOS INESPERADOS DURANTE INTERVALOS
DE LUZ VERDE 3-25
3.21 PINTURA 3-25 4. INDICADORES DE EFECTIVIDAD 4-1 5. SEMÁFOROS DE TIEMPO FIJO 5-1 5.1 DEFINICIÓN 5-1 5.2 VENTAJAS DE LOS SEMÁFOROS DE TIEMPOS FIJOS 5-1 5.3 PARÁMETROS BÁSICOS DE CONTROL 5-1 5.4 SELECCIÓN DEL MECANISMO DE CONTROL 5-2 5.5 FUNDAMENTOS TEÓRICOS 5-3 5.5.1 Intervalo vehicular 5-3 5.5.2 Intervalo de descarga 5-3 5.5.3 Flujo de saturación 5-7 5.5.3.1 Medición del flujo de saturación 5-11 5.5.3.2 Capacidad de un movimiento 5-21
vi
5.5.4 Entreverde (I) 5-22 5.5.4.1 Amarillo (AM) 5-23 5.5.4.2 Todo-rojo (RR) 5-24 5.5.5 Verde mínimo 5-25 6. COORDINACIÓN DE SEMÁFOROS 6-1 6.1 SISTEMAS SIN COMPUTADOR 6-2 6.1.1 Sistemas con planes fijos 6-1 6.1.2 Sistemas semiflexibles 6-2 6.2 SISTEMAS CONTROLADOS POR UN COMPUTADOR 6-2 6.3 PLANES FIJOS Y PLANES DINÁMICOS 6-4 6.4 CÁLCULO DE PLANES 6-4 6.4.1 Sistemas sencillos. Método manual 6-4 6.4.1.1 Procedimiento manual o por “tanteo” 6-5 6.4.2 Sistemas progresivos 6-11 6.4.3 Sistemas de redes 6-11 6.5 REQUISITOS PARA LA INSTALACIÓN DE SISTEMAS
COORDINADOS 6-12
6.5.1 Requisitos generales 6-12 6.5.2 Requisitos básicos 6-13 6.5.2.1 Sistemas que utilizan computador central 6-13 6.5.2.2 Sistemas más sencillos (sin computador, sin cables) 6-14 6.6 CONSIDERACIONES PRÁCTICAS 6-14 6.6.1 Costo 6-14 6.6.2 Normas 6-15 6.6.3 Sistemas sin cable 6-15 7 SEMÁFOROS PEATONALES 7-1 7.1 DEFINICIÓN 7-1 7.2 REQUISITOS PARA SU INSTALACIÓN. 7-1 7.3 TIPO DE REGULACIÓN. 7-2 7.4 REQUISITOS GENERALES DE DISEÑO. 7-2 7.5 SIGNIFICADO DE LAS INDICACIONES 7-3 7.6 UBICACIÓN 7-3 7.7 FUNCIONAMIENTO 7-4 7.8 ESTUDIOS DE INGENIERÍA DE TRÁNSITO. 7-5 7.9 DETECTORES 7-5 BIBLIOGRAFÍA

vii
LISTA DE ANEXOS Página A. MÉTODO DE WEBSTER PARA PROGRAMAR
SEMÁFOROS DE TIEMPO FIJO A-1
A.1 RESUMEN A-1 A.1.1 Efectos de la anchura del acceso A-1 A.1.2 Efecto de la pendiente longitudinal A-3 A.1.3 Efecto de la composición del tránsito A-3 A.1.4 Efecto del giro a izquierda A-4 A.1.5 Efecto del giro a derecha A-5 A.1.6 Efecto de la presencia de peatones A-5 A.1.7 Efecto del vehículo estacionado A-5 A.1.8 Efecto de las características del lugar A-6 A.1.9 Tiempo perdido por fase A-6 A.1.10 Demora A-8 A.1.11 Tiempo de ciclo A-8 A.1.12 Reparto del verde A-9 A.1.13 Procedimiento general del método de diseño A-10 A.2 CAPACIDAD A-10 A.3 FLUJO DE SATURACIÓN A-10 A.4 EJEMPLO A-11 A.4.1 Características generales A-11 A.4.2 Solución A-13 A.4.2.1 Fases A-13 A.4.2.2 Estimación del flujo de saturación (s) y del volumen (q) A-13 A.4.2.3 Determinación del factor de carga (Y) A-16 A.4.2.4 Estimación del tiempo perdido total (L) A-16 A.4.2.5 Cálculo del ciclo óptimo (Co) A-20 A.4.2.6 Reparto del ciclo A-21 A.4.2.7 Verde del semáforo (vφ) A-21 B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE
SEMÁFOROS DE TIEMPO FIJO B-1
B.1 DATOS B-1 B.2 IDENTIFICACION DE MOVIMIENTOS CRITICOS B-2 B.3 CALCULOS PARA LA CAPACIDAD Y PROGRAMACION DE
TIEMPOS DEL SEMAFORO B-2
B.4 REVISION Y EVALUACION DE LA PROGRAMACION. B-2 B.5 RELACIONES FUNDAMENTALES B-3 B.5.1 Capacidad y grado de saturación B-5 B.6 EJEMPLO B-7 B.6.1 Datos B-7 B.6.1.1 Esquema de la intersección B-7
viii
B.6.1.2 Entreverde de los movimientos B-9 B.6.1.3 Verdes mínimos de los movimientos B-11 B.6.1.4 Datos sobre flujo de llegada B-12 B.6.1.5 Estimación de la tasa de flujo de saturación B-12 B.6.1.6 Tiempos perdidos de los movimientos B-12 B.6.1.7 Matriz de fases, verde efectivo mínimo y grado de
saturación práctico B-13
B.6.2 Identificación de los movimientos críticos B-13 B.6.2.1 Determinación de los tiempos necesarios de los
movimientos B-13
B.6.2.2 Diagrama de búsqueda de movimientos críticos B-14 B.6.2.3 Movimientos no-traslapados B-14 B.6.2.4 Movimientos traslapados B-15 B.6.3 Cálculos para la capacidad y programación de tiempos
del semáforo B-15
B.6.3.1 Obtención de parámetros de la intersección tiempo perdido total (L), factor de carga total (Y) y razón de verde efectivo total. (U)
B-15
B.6.3.2 Cálculo del tiempo de ciclo (Co y Cp) B-15 B.6.3.3 Selección de la duración de ciclo (c): B-17 B.6.4 Revisión y evaluación de la programación B-18 B.6.4.1 Revisión con la duración de ciclo escogida B-18 B.6.4.2 Cálculo de los tiempos de verde del semáforo B-22 B.6.4.3 Grados de saturación resultantes de los movimientos B-22 B.7 PLANO Y CUADRO DE CANTIDAD DE OBRA B-22 C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO C-1 C.1 REGULARIDAD DEL VOLUMEN DE TRÁNSITO EN
ARTERIAS C-1
C.1.1 Variabilidad inherente a la demanda de tránsito C-2 C.1.2 Reflexiones C-4 C.2 CONTROL ACCIONADO C-4 C.2.1 Equipo informático disponible C-5 C.2.2 El concepto y la programación de tiempos del controlador
semiaccionado C-5
C.2.2.1 Concepto y beneficios C-6 C.2.2.2 Terminología y principios de programación de tiempo C-8 C.2.2.3 Ubicación del detector C-10 C.2.2.4 Detectores de presencia versus de paso C-11 C.2.2.5 Problemas debido a la alta demanda en la calle
secundaria C-12
C.2.2.6 Ejemplo ilustrativo C-13 C.2.3 Algunos criterios para la localización del detector puntual C-15 C.2.4 El controlador totalmente accionado C-16 C.2.4.1 Conceptos y beneficios C-17 C.2.4.2 Terminología y principios sobre la programación de C-17

ix
tiempos C.2.4.3 Programación de tiempos del controlador accionado. C-18 C.2.5 El control de densidad C-18 C.2.6 Características especiales del controlador accionado C-19 C.2.7 Control de una intersección crítica C-20 D PROGRAMA TRANSYT D-1 D.1 INTRODUCCIÓN D-1 D.2 OPERACIÓN DEL TRANSYT-7F D-3 D.2.1 Generalidades D-3 D.2.2 Convención para la numeración de nodos y arcos D-4 D.2.3 Utilización del paquete McT7F D-4 D.3 APLICACIONES DEL TRANSYT-7F D-6 D.3.1 Generalidades D-6 D.3.2 Simulación del flujo de tránsito D-6 D.3.3 Representación de la red D-7 D.3.4 Modelo de flujo vehicular D-7 D.3.5 Indices de efectividad D-10 D.3.6 Programación de semáforos D-10 D.3.6.1 Duración de ciclo D-10 D.3.6.2 Secuencia de fases D-11 D.3.6.3 Intervalos y duraciones de fase (reparto). D-11 D.3.6.4 Desfases. D-12 D.3.7 Optimización de semáforos D-12 D.3.7.1 Índice de servicio D-12 D.3.7.2 Aplicaciones especiales D-15 D.4 EL MODELO TRANSYT-7F D-17 D.4.1 Generalidades D-17 D.4.2 Descripción funcional D-17 D.4.2.1 Preprocesador D-18 D.4.2.2 Submodelos D-18 D.4.2.3 Postprocesador D-19 D.4.3 Algoritmos computacionales D-19 D.4.3.1 Flujo de tránsito D-19 D.4.3.2 Movimientos permitidos D-24 D.4.3.3 Dispersión del pelotón D-24 D.4.3.4 Indicadores de efectividad (IE) D-29 D.5 DATOS DE ENTRADA NECESARIOS D-37 D.5.1 Datos de la red D-37 D.5.2 Parámetros de programación de semáforos D-37 D.5.3 Datos geométricos y de tránsito D-37 D.5.4 Datos de control D-37 D.5.5 Toma de datos D-37 D.5.5.1 Datos de la red D-37 D.5.5.2 Datos del semáforo D-38 D.5.5.3 Datos de flujos de saturación, tiempo perdido en el D-38

x
arranque y prolongación del tiempo de verde efectivo. D.5.5.4 Datos de velocidad y tiempo de recorrido D-39 D.5.5.5 Datos de volumen de tránsito D-40 D.5.6 Estructura del archivo de datos del TRANSYT-7F D-41 D.6 INTERPRETACION DE RESULTADOS D-43 D.6.1 Salidas del programa D-43 D.6.1.1 Informe de datos de entrada. D-43 D.6.1.2 Tabla de parámetros del tránsito D-43 D.6.1.3 Programación de los controladores D-43 D.6.1.4 Diagramas de perfil de flujo en líneas de detención D-43 D.6.1.5 Diagramas espacio-tiempo. D-43 D.6.1.6 Resumen de evaluación de duración de ciclo. D-44 D.6.2 Interpretación de los índices de efectividad D-44 D.6.3 Interpretación de la programación de los controladores D-44 D.6.4 Interpretación de gráficos D-44 D.6.4.1 Gráfico de perfil de flujo en la línea de detención D-44 D.6.4.2 Diagramas espacio-tiempo. D-44 D.7 EJEMPLO D-45 D.7.1 Presentación del programa TRANSYT-7F D-50 D.7.2 Informe de datos de entrada D-51 D.7.3 Tabla resumen de indicadores por ciclo D-52 D.7.4 Tabla de indicadores de desempeño para el mejor ciclo D-53 D.7.5 Tabla de los indicadores de operación de tránsito
considerando el conjunto de nodos D-54
D.7.6 Histogramas de flujo D-55 D.8 OTRAS VERSIONES DE TRANSYT D-57
LISTA DE TABLAS Página 1. Volumen vehicular mínimo (Capacidad) 2-4 2. Volumen vehicular mínimo (Interrupción tránsito) 2-5 3. Distancia de visibilidad mínima en metros 3-19 4. Valores de Ji cuadrado 4-4 5. Intervalos de entrada a una intersección semaforizada 5-8 6. Intervalos de descarga de colas de vehículos 5-8 7. Flujo de saturación, tiempo perdido en el arranque y
prolongación del verde efectivo 5-19
8. Flujo de saturación, tiempo perdido en el arranque y ganado en el amarillo
5-20
9. Flujos de saturación (s), tiempo perdido al inicio del verde λ1 y ganado en el amarillo λ2 en Medellín
5-21
A.1. Flujos de saturación para ancho de acceso entre 3,05 y 5,2
m A-2
xi
A.2. Factores de equivalencia vehicular según Webster A-3 A.3. Factores de equivalencia vehicular según Cañas y Carmona
(1993). A-4
A.4. Factor por tipo de lugar A-5 A.5. Datos preliminares de la intersección A-12 A.6. Datos sobre el percentil 85 de la velocidad A-13 A.7. Estimación de los flujos de saturación de los movimientos A-13 A.8. Factores de carga de los movimientos y de la intersección A-16 A.9. Entreverde y tiempo perdido de las fases A-20 B.1 Entreverdes y verdes mínimos de los movimientos B-12 B.2 Flujos de llegada y flujos de saturación de los movimientos B-12 B.3 Tiempo perdido en cada movimiento B-13 B.4 Matríz de fases, verde efectivo mínimo y grado de
saturación práctico B-13
B.5 Tiempos necesarios de los movimientos B-14 B.6 Revisión de la programación con ciclo de 60 segundos B-18 B.7 Revisión de la programación con ciclo de 75 segundos B-19 B.8 Revisión de la programación con ciclo de 65 segundos B-20 B.9 Grados de saturación resultantes de los movimientos B-22 B.10 Cuadro de postes B-23 B.11 Cuadro de cantidades de obra B-23 D.1 Requerimientos mínimos de equipo de computación D-3 D.2 Opciones del menú principal D-4 D.3 Estructura del archivo de datos del TRANSYT-7F D-41 D.4 Relación de nodos modelados en la Transversal Inferior D-45 D.5 Datos de entrada al TRANSYT-7F D-50 D.6 Presentación del programa TRANSYT-7F D-51 D.7 Informe de los datos de entrada D-51 D.8 Resumen de los indicadores por ciclo D-53 D.9 Indicadores de desempeño para el mejor ciclo D-54 D.10 Indicadores de la operación del tránsito de la red D-54
LISTA DE FIGURAS Página 1. Cara de semáforo abierta. 1-4 2. Unidad óptica de un semáforo con el sistema para evitar el
efecto “fantasma” ocasionado por los rayos del sol. 1-4
3. Unidad de control o controlador 1-5 4. Esquema de la intersección (Avenida El Poblado con calle 1
Sur). 1-6
5. Diagrama de fases del semáforo. 1-6 6. Diagrama de programación de tiempos del semáforo y 1-7
xii
Diagrama del ciclo del semáforo. 7. Diagrama condición - colisión Av. Circunvalar con calle 70
(Santafé de Bogotá, D. C.). 2-2
8 Ilustración de la definición de intervalo vehicular y brecha. 2-3 9. Ilustración de la definición de demora uniforme que adopta
TRANSYT-7F 2-3
10. Posición de lentes en un semáforo vertical de cinco lentes. 3-3 11. Ilustración de los intervalos de una fase del semáforo 3-3 12. Disposiciones usuales de las lentes en las caras de un
semáforo. 3-4
13. Flecha direccional en lente de 20 cm. 3-9 14. Flecha direccional en lente de 30 cm. 3-9 15. Placas de contraste 3-14 16. Ubicación de semáforos y número mínimo de caras 3-15 17. Ubicación de semáforos y número recomendado de caras. 3-16 18. Campo visual (Hobbs y Richardson, 1967) 3-17 19. Campo de visión desde el interior del vehículo 3-17 20. Ubicación de postes y ménsulas 3-18 21. Cono de visibilidad 3-20 22. Semáforo montado en poste con ménsula corta 3-22 23. Semáforo colgante 3-22 24. Semáforo suspendido en ménsula. 3-23 25. Hoja de Campo para el Estudio de Demora en Intersecciones. 4-2 26. Un ejemplo para ilustrar el concepto de cola excedente 4-7 27. Condiciones en tránsito interrumpido 5-4 28. Tasa de flujo de saturación y tiempo perdido 5-4 29. Comparación de varios resultados de investigación de los
intervalos de descarga de una cola. 5-5
30. Intervalos de descarga, Transversal Inferior con calle 1 sur acceso W.
5-6
31. Intervalos de descarga Transversal inferior con calle 16A sur acceso Norte
5-7
32. Modelo básico del flujo de saturación y definiciones 5-9 33. Hoja de campo – Flujo de saturación. 5-12 34. Formato para la toma de datos y análisis de flujo de
saturación. TRANSYT-7F. 5-16
35. Hoja de datos y de análisis para tiempo perdido en el arranque y extensión del verde efectivo.
5-18
36. Ilustración del verde y rojo efectivos y capacidad del movimiento.
5-22
37. Ilustración del entreverde. 5-22 38. Variabilidad del amarillo 5-24 39. Ilustración del todo-rojo. 5-25 40. Ilustración del verde mínimo vehicular y peatonal 5-26 41. Componentes del hardware de un sistema de control de
tránsito. 6-3

xiii
42. Sistema de control descentralizado de semáforos 6-3 43. Diagrama tiempo-espacio de la Avenida San Juan entre
carrera 79AA y carrera 65 para el periodo pico de la mañana (Entrada al centro de la ciudad).
6-6
44. Diagrama tiempo-espacio de la Avenida San Juan entre carrera 79AA y carrera 65 para el periodo pico de la tarde (Salida del centro de la ciudad)
6-9
45. Coordinación de un sistema de semáforos en una vía de doble sentido
6-10
46. Diagrama tiempo-espacio de la Avenida Colombia con ciclo de 90 segundos entregado por TRANSYT-7F.
6-13
47. Diseño de semáforos peatonales. 7-1 A.1. Flujo de saturación según anchura del acceso. A-2 A.2. Flujo de saturación A-6 A.3. Ilustración del tiempo perdido por fase A-7 A.4. Demora promedio por vehículo. A-9 A.5. Intersección de la carrera 30 con calle 5 A-12 A.6. Fases del semáforo para el cruce de la carrera 30 con calle
5 A-13
A.7. Distribución de volúmenes en el acceso sur – norte. A-14 A.8. Distribución de volúmenes en el acceso este – oeste. A-14 A.9. Distribución de volúmenes en el acceso norte – sur. A-15 A.10. Distribución de volúmenes en el acceso oeste– este. A-15 A.11. Trayectorias de los movimientos conflictivos para el cálculo
del todo-rojo en la fase A. A-18
A.12. Trayectorias de los movimientos conflictivos para el cálculo del todo-rojo en la fase B.
A-18
A.13. Trayectorias de los movimientos conflictivos para el cálculo del todo-rojo en la fase C.
A-19
A.14. Trayectorias de los movimientos conflictivos para el cálculo del todo-rojo en la fase D.
A-19
A.15. Esquema de la programación de tiempos del semáforo. A-21 B.1. Esquema de la intersección ejemplo B-8 B.2. Movimientos de la intersección B-8 B.3. Fases del semáforo B-8 B.4. Todo-rojo del movimiento 5 B-9 B.5. Todo-rojo del movimiento 2 B-10 B.6. Todo-rojo del movimiento 4 B-10 B.7. Diagrama de búsqueda de movimientos críticos B-14 B.8. Diagrama reducido de movimientos críticos B-15 B.9. Demora promedio por vehículo B-17 B.10. Diagrama de programación de tiempos del semáforo B-22 B.11. Ubicación del equipo B-23
xiv
C.1. Patrones de tránsito promedio en un sitio, por día de semana.
C-2
C.2. Variabilidad del aforo en un sitio, por período de tiempo. C-3 C.3. Instantes en los cuales se alcanzan los niveles de tránsito
especificados. C-4
C.4. Calle secundaria con detectores para el uso en el control semiaccionado
C-6
C.5. Una recomendación para determinar el tipo de control. C-8 C.6. Ilustración de una fase accionada por la llegada de
vehículos. C-10
C.7. Ejemplo de ubicación del detector en una vía secundaria. C-13 C.8. Ejemplo, ilustración de la fase accionada. C-15 D.1. Representación simplificada del flujo vehicular que parte de
una cola detenida ante una línea de detención. D-8
D.2. Caso simple de dispersión de un pelotón de vehículos D-9 D.3. Dispersión de pelotones múltiples. D-9 D.4. Representación de los parámetros de programación de un
semáforo. D-10
D.5. Perfiles de flujo de tránsito D-22 D.6. Dispersión del pelotón en TRANSYT D-25 D.7. Factor de dispersión del pelotón como función del tiempo de
viaje D-26
D.8 Perfiles de flujo de partidas antes y después de un cambio en la programación del semáforo del nodo de atrás
D-28
D.9. Medición típica de las demoras D-29 D.10 Ilustración de la definición de demora uniforme que adopta
TRANSYT-7F D-30
D.11. Obtención de la demora uniforme D-31 D.12. Estimación de demoras empleada por TRANSYT-7F D-33 D.13. Estimación de las detenciones D-34 D.14. Relación entre el porcentaje de detenciones y duración de la
demora D-35
D.15. Ajuste al modelo de detenciones totales D-35 D.16. Plano de la zona de influencia de la Transversal Inferior D-46 D.17. Esquema vial de la Transversal Inferior D-47 D.18. Modelación de la Transversal Inferior para TRANSYT-7F D-48 D.19. Convenciones para modelar la red D-49
CAPÍTULO 1. INTRODUCCIÓN
1-1
1 INTRODUCCION Debido a la ausencia de una publicación que reuniese los aspectos más relevantes sobre semáforos y en el marco académico sobre ingeniería de tránsito de los cursos de pregrado y posgrado en Vías y Transporte de la Universidad Nacional de Colombia - Sede Medellín, se ha preparado este documento como guía introductoria a dicho tema.
En su preparación se han recogido los tópicos principales de varias publicaciones internacionales y nacionales, además, su desarrollo ha considerado la experiencia del autor lograda en algunos trabajos de diseño de planes de programación, asesoría en el suministro e instalación de equipos para semáforos.
En la preparación de este texto se ha considerado el capítulo 9 de la tesis de grado, "Adiciones y mejoras al Manual de Dispositivos para la Regulación del Tránsito en Calles y Carreteras de Colombia" (Soporte técnico) para optar al título de Magister en Ingeniería de Tránsito y Transporte de los Ingenieros Juan Amado Lizarazo y Mauricio Pineda Rivera en la Universidad del Cauca de 1988.
La información que se presenta en este documento no tiene propósitos normativos, únicamente de referencia; ésto no descarta la posibilidad de ser considerado como un primer paso para reglamentar las actividades que tienen relación con el área de los semáforos en Colombia.
En un principio se dan algunas generalidades, requisitos para la instalación de semáforos y sus características generales. Posteriormente se tratan los indicadores de efectividad, semáforos de tiempo fijo, accionados por el tránsito, sistemas coordinados y los semáforos peatonales. Se hace referencia al diseño de ellos y preparación de planos. En los anexos se profundiza sobre algunos procedimientos de diseño y su aplicación a través de ejemplos.
1.1 DEFINICIÓN
Se denominan semáforos a todos los aparatos reguladores del tránsito en las calles accionados por corriente eléctrica que utilizan lentes iluminadas para exhibir sus indicaciones. Las instrucciones del semáforo se pueden complementar mediante el uso de señales y demarcaciones.
Según el Código Nacional de Tránsito, SECRETARIA DE TRÁNSITO Y TRANSPORTE DE SANTAFÉ DE BOGOTÁ, D. C., 1996, Semáforo:

CAPÍTULO 1. INTRODUCCIÓN
1-2
Dispositivo electromecánico o electrónico para regular el tránsito de peatones y/o vehículos mediante el uso de señales luminosas.”
1.2 FUNCIÓN
La función principal de un semáforo en el control de una intersección es dar el paso alternativamente a los distintos grupos de vehículos y/o peatones, de tal manera que éstos pasen a través de la intersección con un mínimo de problemas, riesgos y demoras.
1.3 OBJETIVOS
Los objetivos del diseño de una intersección controlada por semáforos se resume así:
• Reducir y prevenir cierto tipo de accidentes en la intersección y en las intersecciones aledañas.
• Reducir las demoras que experimentan los peatones y vehículos al intentar cruzar la intersección, y al mismo tiempo evitar la obstrucción de las intersecciones más cercanas causado por colas largas.
• Reducir el consumo de combustible de los vehículos en la intersección.
• Reducir la emisión de contaminantes del aire de automotores y otros factores que empeoran el medio ambiente.
Los dos primeros objetivos reciben generalmente la más alta prioridad en una intersección, y como es natural, interesa satisfacerlos con un mínimo de costo de instalación del sistema de semáforos.
1.4 NORMALIZACIÓN
Debido al aumento en el número de semáforos que impone el crecimiento en la circulación del tránsito en nuestro país es de importancia capital que exista una normalización a escala nacional de estos dispositivos y de todos aquellos que tienen incidencia en el comportamiento del público con relación al movimiento del tránsito. Como el diseño, aplicación, ubicación y modo de operar de un semáforo se prestan para una normalización, se han incorporado en este documento los protocolos correspondeintes.
El usuario de una vía debe poder ver claramente las luces de un semáforo y responder en forma rápida y correcta a sus indicaciones. La normalización de la ubicación y secuencia operacional es fundamental para lograr este fin. Los semáforos deben situarse en lugares que el conductor (o peatón) espere encontrarlos y no pueda evitar verlos. Las indicaciones y su posición deben

CAPÍTULO 1. INTRODUCCIÓN
1-3
seguir normas universales de tal manera que el mensaje del semáforo sea reconocido y atendido inmediatamente.
El Código Nacional de Tránsito, SECRETARIA DE TRÁNSITO Y TRANSPORTE DE SANTAFÉ DE BOGOTÁ, D. C., 1996, reglamenta los semáforos mediante los siguientes artículos:
TÍTULO III. NORMAS DE COMPORTAMIENTO EN EL TRÁNSITO.
CAPÍTULO IV. Regulación del tránsito.
Artículo 118. Los semáforos se dividen en:
Semáforos para el control de vehículos (pare y siga).
Semáforos para peatones.
Semáforos especiales.
Semáforos de aproximación a cruces de tren y guardarrieles.
Artículo 119. Las señales luminosas para ordenar la circulación son las siguientes:
Roja: Indica el deber de detenerse sin pasar la raya inicial de la zona de peatones.
Amarilla: Indica “atención” para un cambio de luces o señales y para que el cruce sea desalojado por los vehículos que se encuentran en él. Está prohibido iniciar la marcha en luz amarilla.
Verde: Significa “vía libre”.
1.5 AUTORIDAD LEGAL
Los semáforos que regulan el tránsito deben estar instalados y operados solamente por una autoridad competente. La instalación de señales u otros dispositivos que obstaculicen o interfieran con la función de los semáforos debe ser prohibida. Es imperativo que las indicaciones de los semáforos sean estrictamente observadas por el público.
1.6 DEFINICIONES SOBRE LOS SEMÁFOROS
• Cara: es la parte del semáforo que regula uno o más movimientos de la circulación para vehículos provenientes de un solo sentido. Ver Figura 1.
• Unidad óptica: Conjunto formado por la lente, reflector, bombillo, portabombillo y puerta. Da una sola indicación luminosa. Ver Figura 2.

CAPÍTULO 1. INTRODUCCIÓN
1-4
FIGURA 1. Cara de semáforo abierta.
FIGURA 2. Unidad óptica de un semáforo con el sistema para evitar el
efecto “fantasma” ocasionado por los rayos del sol. FUENTE: Modificado de ASCON. Verkehrssysteme. (1990). Boletín informativo de Ascom Zeag AG. Berna. Suiza.
• Cabeza: es el conjunto de una o más caras del semáforo.
• Lente: es la parte de la unidad óptica, que por su refracción dirige la luz proveniente del bombillo y su reflector, hacia el conductor o peatón.
CAPÍTULO 1. INTRODUCCIÓN
1-5
• Indicación del semáforo: es la iluminación de la lente o lentes del semáforo. Puede ser: roja, amarilla o verde. En países como Alemania y Suiza se utilizan otros colores como el azul y el blanco.
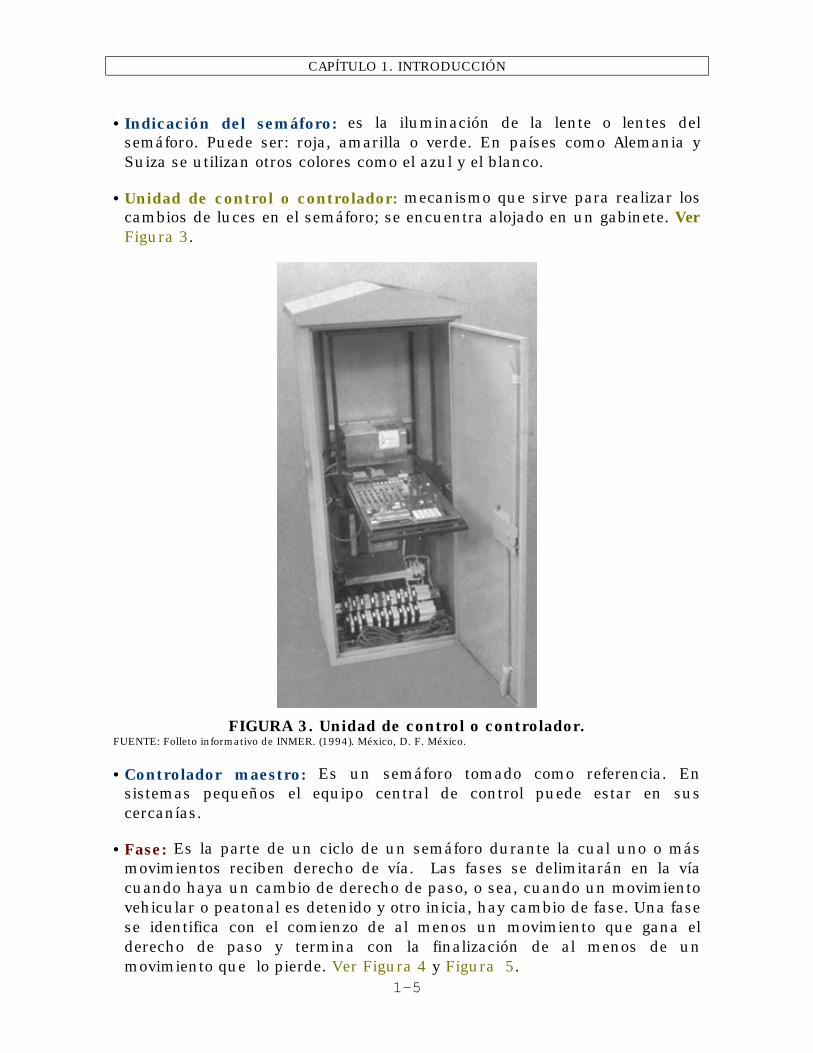
• Unidad de control o controlador: mecanismo que sirve para realizar los cambios de luces en el semáforo; se encuentra alojado en un gabinete. Ver Figura 3.
FIGURA 3. Unidad de control o controlador.
FUENTE: Folleto informativo de INMER. (1994). México, D. F. México.
• Controlador maestro: Es un semáforo tomado como referencia. En sistemas pequeños el equipo central de control puede estar en sus cercanías.
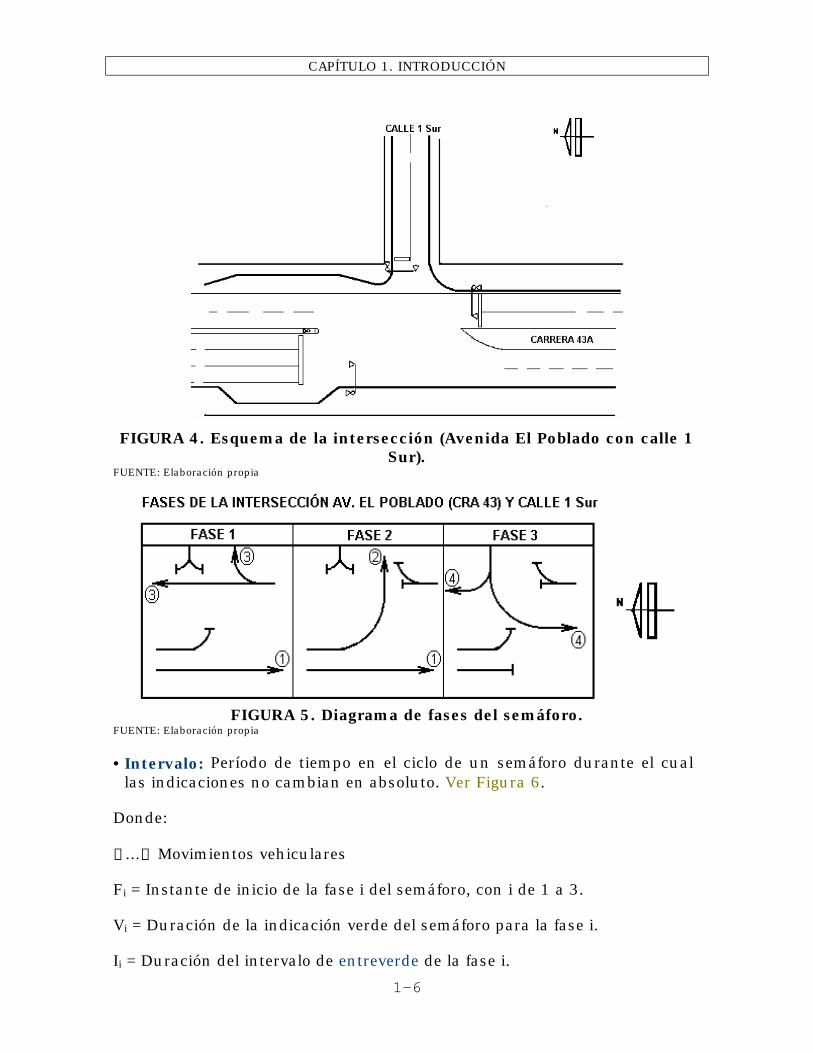
• Fase: Es la parte de un ciclo de un semáforo durante la cual uno o más movimientos reciben derecho de vía. Las fases se delimitarán en la vía cuando haya un cambio de derecho de paso, o sea, cuando un movimiento vehicular o peatonal es detenido y otro inicia, hay cambio de fase. Una fase se identifica con el comienzo de al menos un movimiento que gana el derecho de paso y termina con la finalización de al menos de un movimiento que lo pierde. Ver Figura 4 y Figura 5.
CAPÍTULO 1. INTRODUCCIÓN
1-6
FIGURA 4. Esquema de la intersección (Avenida El Poblado con calle 1
Sur). FUENTE: Elaboración propia
FIGURA 5. Diagrama de fases del semáforo.
FUENTE: Elaboración propia
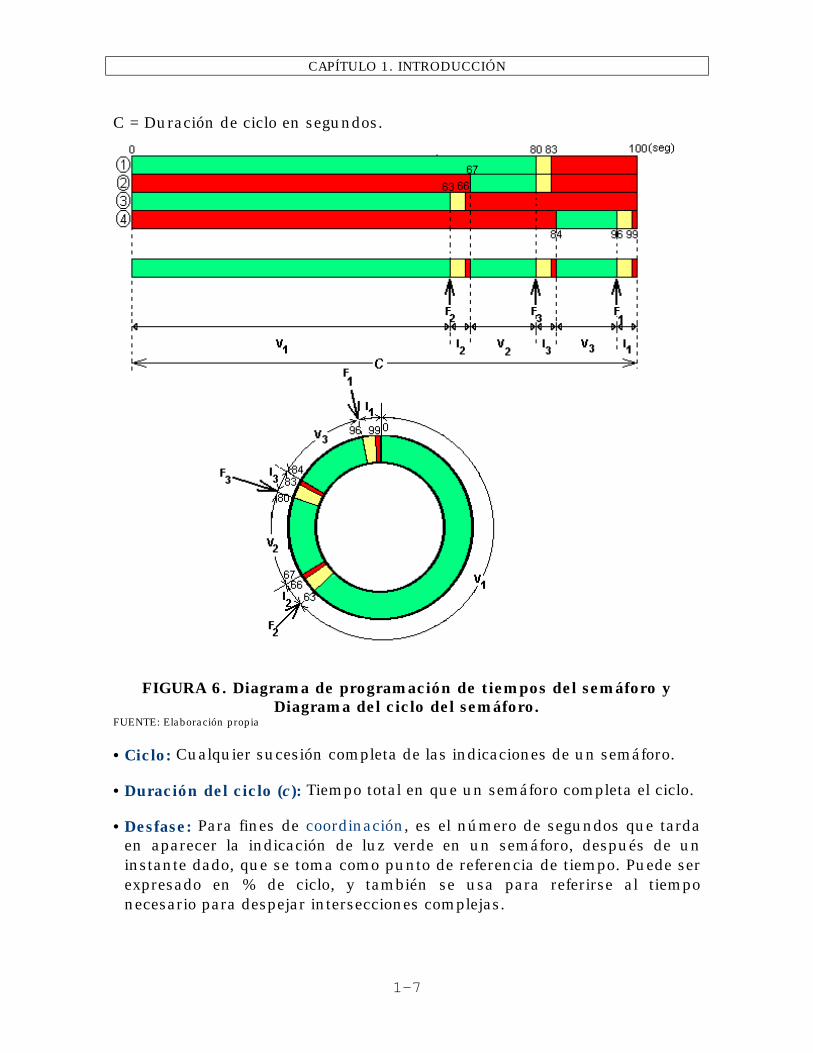
• Intervalo: Período de tiempo en el ciclo de un semáforo durante el cual las indicaciones no cambian en absoluto. Ver Figura 6.
Donde:
① ...④ Movimientos vehiculares
Fi = Instante de inicio de la fase i del semáforo, con i de 1 a 3.
Vi = Duración de la indicación verde del semáforo para la fase i.
Ii = Duración del intervalo de entreverde de la fase i.
CAPÍTULO 1. INTRODUCCIÓN
1-7
C = Duración de ciclo en segundos.
FIGURA 6. Diagrama de programación de tiempos del semáforo y
Diagrama del ciclo del semáforo. FUENTE: Elaboración propia
• Ciclo: Cualquier sucesión completa de las indicaciones de un semáforo.
• Duración del ciclo (c): Tiempo total en que un semáforo completa el ciclo.
• Desfase: Para fines de coordinación, es el número de segundos que tarda en aparecer la indicación de luz verde en un semáforo, después de un instante dado, que se toma como punto de referencia de tiempo. Puede ser expresado en % de ciclo, y también se usa para referirse al tiempo necesario para despejar intersecciones complejas.
CAPÍTULO 1. INTRODUCCIÓN
1-8
1.7 CLASIFICACIÓN
Las principales clases de semáforos que regulan el tránsito en zonas urbanas y rurales son las siguientes:
• Semáforos de tiempos fijos: En el cual el ciclo, la duración y secuencia de intervalos son invariables y están definidos por un programa establecido con anticipación. Un semáforo puede tener varios programas, con el objeto de activarlos a diferentes horas del día para satisfacer mejor la demanda del tránsito.
• Semáforos totalmente accionados por el tránsito: En los cuales la duración de cada fase y a veces su orden depende del tránsito que usa la intersección. Esta demanda es identificada mediante detectores (neumáticos, lazos de inducción, infrarojos, etc.). Disponen de medios para ser accionados en todos los accesos de la intersección.
• Semáforos semiaccionados por el tránsito: Disponen de medios para ser accionados en uno o más accesos. Estos semáforos son aplicables a las intersecciones de vías con alto volumen y altas velocidades, con calles secundarias de tránsito relativamente liviano. La indicación normalmente es verde en la calle principal, cambiando a la calle secundaria solamente como resultado de la acción de vehículos o peatones detectados en ella.
• Semáforos controlados por computador: Este tipo de semáforos no sólo se encarga de enviar indicaciones de fase a los controladores locales, si no que proporciona otras funciones como:
• Planes para vehículos de emergencia (ambulancias, bomberos, policía) de manera que éstos cuenten con una banda verde especial.
• Leyendas variables, que indiquen por ejemplo el cambio de sentido de una vía o la calidad de la circulación.
• Información sobre la disponibilidad de estacionamiento.
• Conteo automático de tránsito.
• Comprobación del buen funcionamiento de los controladores locales.
• Combinaciones de estos tipos: Por ejemplo sistemas coordinados que también pueden responder a la demanda instantánea.

CAPÍTULO 2. REQUISITOS BÁSICOS PARA LA INSTALACIÓN DE SEMÁFOROS
2-1
2 REQUISITOS BÁSICOS PARA LA INSTALACION DE SEMÁFOROS
2.1 DATOS DE INGENIERÍA DE TRÁNSITO PRELIMINARES Según el Manual Interamericano, se requiere una investigación intensiva de las condiciones de tránsito y de las características físicas de la intersección para determinar la necesidad de una instalación de semáforos y para suministrar los datos necesarios para su diseño y la operación apropiada. Esta investigación debe considerar:
1. El número de vehículos por hora que entran en la intersección desde cada vía de acceso durante 16 horas consecutivas de un día representativo. Las 16 horas seleccionadas deben contener el mayor porcentaje del tránsito durante 24 horas. [El propósito es el de determinar el comportamiento de la demanda durante el día y definir los períodos de diseño pico y valle].
2. Los volúmenes de vehículos para cada movimiento desde cada vía de acceso, clasificados por tipo de vehículo (automóviles, buses, camiones y otros), en períodos de 15 minutos[(en intersecciones donde la demanda es muy variable, períodos de 5 minutos)], durante dos horas de la mañana y dos horas de la tarde, en las que el tránsito que entra a la intersección es mayor[(es decir, en períodos pico detectados con la información del paso anterior)].
3. Los aforos de volúmenes de los peatones en cada cruce, durante el mismo período mencionado para los vehículos en el párrafo anterior (2), y también durante las horas de mayor volumen de peatones. Cuando los niños y personas de edad avanzada necesitan consideraciones especiales, se clasificará a los peatones por observación general y se registrarán por grupos de edad así:
a) Menores de 13 años.
b) De 13 a 60 años.
c) Mayores de 60 años.
4. El percentil 85 de la velocidad [de medidas tomadas en verde sin obstrucciones] de todos los vehículos en todos los accesos no controlados por la intersección.
5. Un diagrama que muestre las características físicas y operacionales de la intersección como estado del pavimento, geometría de la intersección y que incluya canalizaciones, pendientes, y restricciones a la distancia de visibilidad, paradas y rutas de buses, condiciones de

CAPÍTULO 2. REQUISITOS BÁSICOS PARA LA INSTALACIÓN DE SEMÁFOROS
2-2
estacionamientos en los accesos, marcas en el pavimento, iluminación de las calles y calzadas, situación de los cruces de ferrocarril próximos, distancia a los semáforos más cercanos, postes utilizables como posibles elementos de sujeción y los usos del suelo.
6. Un inventario de diagramas de colisión y condición de los accidentes, de por lo menos un año, preferiblemente en el último, clasificándolo por tipo, ubicación, dirección de los movimientos, severidad, hora, fecha, y día de la semana. Ver Figura 7.
FIGURA 7. Diagrama condición - colisión Av. Circunvalar con calle 70 (Santafé de Bogotá, D. C.).
FUENTE: FASECOLDA. MORENO C., Luis E., VALENCIA A., Víctor G. Y CARO F., Miguel A. Identificación y solución de sitios críticos de accidentalidad en vías urbanas (1990) Bogotá, D.C.
7. Para entender mejor cómo circula el tránsito en la intersección, también es conveniente que se obtengan los siguientes datos, durante los períodos especificados en el párrafo 2. Ver Figura 8.
a) Las demoras en vehículos-segundos para cada acceso. Demora es la diferencia de tiempo que tarda un vehículo en atravesar una intersección sin la presencia de otros vehículos, sin detenerse, y el tiempo que tarda en atravesarla en operación normal. En el capítulo cuarto se da su definición y se explica el procedimiento para medirla.

CAPÍTULO 2. REQUISITOS BÁSICOS PARA LA INSTALACIÓN DE SEMÁFOROS
2-3
Figura 8 Ilustración de la definición de intervalo vehicular y brecha.
FUENTE: RADELAT E., Guido. (1991) Curso sobre capacidad vial. Universidad Nacional de Colombia – Sede Medellín.
b) El número y distribución de las brechas en el tránsito de los vehículos en la vía principal, cuando el tránsito de la vía secundaria utilice la intersección con seguridad.
c) El tiempo de demora de los peatones, de por lo menos dos períodos de 30 minutos de máxima demanda, en un día representativo de la semana. Ver Figura 9.
FIGURA 9. Ilustración de la definición de demora uniforme que adopta
TRANSYT-7F FUENTE: GOMEZ, Dorian, VALENCIA A., Víctor G. y VILLÁN R., Fernando. (1988) Aplicación del programa TRANSYT-7F para la optimización de semáforos en Colombia. Tesis de Maestría en Ingeniería e Tránsito y Transporte. Universidad del Cauca. Popayán. COLOMBIA.

CAPÍTULO 2. REQUISITOS BÁSICOS PARA LA INSTALACIÓN DE SEMÁFOROS
2-4
2.2 REQUISITOS BÁSICOS PARA LA INSTALACIÓN DE SEMÁFOROS De acuerdo a las recomendaciones que plantea la U.S. BUREAU OF PUBLIC ROADS, 1988, no deben instalarse semáforos en una intersección a menos que satisfagan dos o más de los requisitos que se mencionan a continuación:
a) Si se iguala o sobrepasa el volumen mínimo de vehículos.
b) Cuando es necesaria la interrupción de tránsito continuo.
c) Si se iguala o sobrepasa el volumen mínimo de peatones.
d) Para facilitar el movimiento progresivo de los vehículos.
e) Si existen antecedentes sobre accidentes.
f) Por la combinación de requisitos anteriores.
2.2.1 Requisito 1. Volumen mínimo de vehículos. Este requisito se basa en los volúmenes vehiculares que usa la intersección y supone que es posible identificar una vía principal y una secundaria. Los volúmenes se miden en vehículos por hora (y no automóviles equivalentes).
Tabla 1. Volumen vehicular mínimo N° de carriles por cada acceso Volumen mínimo veh/h Vía Principal Vía Secundaria Vía Principal en ambos
accesos Vía Secundaria en acceso
de mayor ingreso 100% 80% 100% 80% 1 1 500 400 150 120
2 o más 1 600 480 150 120 2 o más 2 o más 600 480 200 160
1 2 o más 600 480 200 160
Los volúmenes de la tabla anterior se deben identificar en cada una de las 8 horas de mayor demanda de un día promedio. Para el día promedio se deben tener en cuenta los días feriados o sus contiguos, días en períodos de vacaciones escolares u otros que se aparten de lo normal. Si existen razones para estimar que interesan las condiciones en otros días críticos (por ejemplo: sábados en calles comerciales), también deben tomarse aforos en esos períodos.
2.2.2 Requisito 2. Interrupción del tránsito continuo. Este requisito se aplica cuando las condiciones de circulación en la vía principal sean tales que el tránsito de la vía secundaria sufra demoras inusitadamente largas al entrar en la vía principal o al cruzarla. Este requisito se satisface cuando durante en cada una de cualquiera de las 8 horas de un día promedio, en
CAPÍTULO 2. REQUISITOS BÁSICOS PARA LA INSTALACIÓN DE SEMÁFOROS
2-5
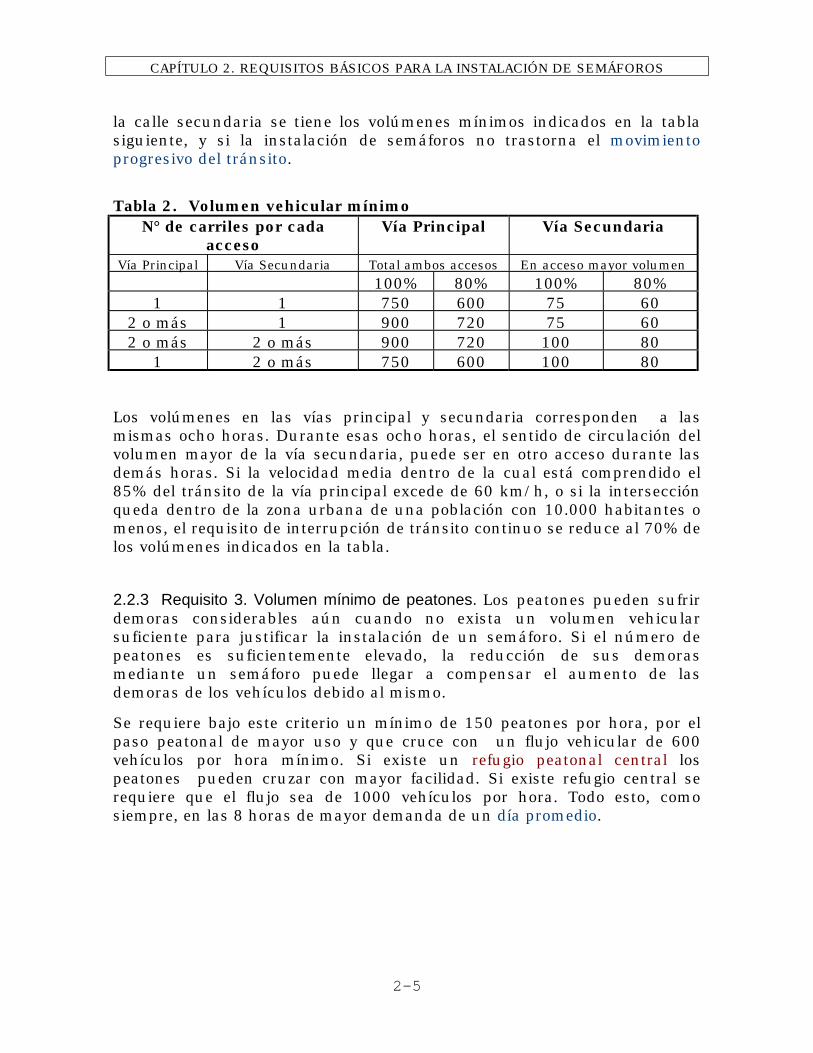
la calle secundaria se tiene los volúmenes mínimos indicados en la tabla siguiente, y si la instalación de semáforos no trastorna el movimiento progresivo del tránsito.
Tabla 2. Volumen vehicular mínimo N° de carriles por cada
acceso Vía Principal Vía Secundaria
Vía Principal Vía Secundaria Total ambos accesos En acceso mayor volumen 100% 80% 100% 80% 1 1 750 600 75 60
2 o más 1 900 720 75 60 2 o más 2 o más 900 720 100 80
1 2 o más 750 600 100 80
Los volúmenes en las vías principal y secundaria corresponden a las mismas ocho horas. Durante esas ocho horas, el sentido de circulación del volumen mayor de la vía secundaria, puede ser en otro acceso durante las demás horas. Si la velocidad media dentro de la cual está comprendido el 85% del tránsito de la vía principal excede de 60 km/h, o si la intersección queda dentro de la zona urbana de una población con 10.000 habitantes o menos, el requisito de interrupción de tránsito continuo se reduce al 70% de los volúmenes indicados en la tabla.
2.2.3 Requisito 3. Volumen mínimo de peatones. Los peatones pueden sufrir demoras considerables aún cuando no exista un volumen vehicular suficiente para justificar la instalación de un semáforo. Si el número de peatones es suficientemente elevado, la reducción de sus demoras mediante un semáforo puede llegar a compensar el aumento de las demoras de los vehículos debido al mismo.
Se requiere bajo este criterio un mínimo de 150 peatones por hora, por el paso peatonal de mayor uso y que cruce con un flujo vehicular de 600 vehículos por hora mínimo. Si existe un refugio peatonal central los peatones pueden cruzar con mayor facilidad. Si existe refugio central se requiere que el flujo sea de 1000 vehículos por hora. Todo esto, como siempre, en las 8 horas de mayor demanda de un día promedio.
CAPÍTULO 2. REQUISITOS BÁSICOS PARA LA INSTALACIÓN DE SEMÁFOROS
2-6
2.2.4 Requisito 4. Movimiento progresivo. Para favorecer el movimiento progresivo de los vehículos, a veces hay que instalar semáforos en intersecciones que en otras condiciones no serían necesarios. Esto depende de la necesidad de regular eficientemente las velocidades de los grupos compactos de vehículos. Se satisface el requisito correspondiente en los siguientes casos:
a) En intersecciones aisladas de vías con circulación en un sentido, o en vías en las que prevalece la circulación en un solo sentido, y en las que los semáforos inmediatos están demasiado distantes para conservar el agrupamiento compacto y las velocidades de los vehículos.
b) Si los semáforos inmediatos en una vía con doble circulación no permiten el grado necesario de control.
2.2.5 Requisito 5. Accidentes. La opinión común del público en general de que los semáforos reducen materialmente el número de accidentes raras veces es sustentada por la experiencia. Con frecuencia ocurre que se producen más accidentes cuando se instalan semáforos que cuando no existían. Los semáforos no deben instalarse con base en un solo accidente espectacular ni a demandas irrazonables o predicciones de accidentes que puedan ocurrir. El requisito de accidentes se satisface cuando:
a) No se ha reducido la frecuencia de accidentes después de realizar mejoras geométricas y aplicar una señalización que se haya experimentado satisfactoriamente en otros casos.
b) Se han producido en los últimos doce meses, cinco o más accidentes, susceptibles de evitarse con semáforos, en los que hubo heridos o daños a la propiedad.
c) Cuando exista un volumen de tránsito de vehículos y peatones no menor del 80% de los especificados en el requisito de volumen mínimo de vehículos (Tabla 1), en la interrupción del tránsito continuo, o en el requisito del volumen mínimo de peatones.
d) La instalación no interrumpa considerablemente el movimiento progresivo del tránsito.
2.2.6 Requisito 6. Combinación de requisitos. Los semáforos pueden justificarse a veces cuando ningún requisito es satisfecho, pero dos o más se cumplen en un 80% o más de los valores indicados. Estos casos excepcionales deben ser decididos con base en un análisis exhaustivo de los factores pertinentes.
Una prueba adecuada de otras medidas correctivas que causen menos demoras e inconvenientes al tránsito que el semáforo debe preceder a la instalación de semáforos bajo este requisito.

CAPÍTULO 2. REQUISITOS BÁSICOS PARA LA INSTALACIÓN DE SEMÁFOROS
2-7
2.2.7 Consideraciones especiales. Es importante tener en cuenta que en ciertas ocasiones la instalación de un semáforo puede ser innecesaria, aún cuando alguno de los requisitos anteriores se cumpla. Esto puede darse en alguno de los siguientes casos:
a) La presencia de semáforos en intersecciones cercanas causa interrupciones en el tránsito que permiten el cruce de los vehículos en la vía secundaria.
b) Vehículos lentos pueden producir también interrupciones en el tránsito prioritario.
c) Un alto porcentaje de giros a la izquierda puede ser atendido mejor si se instala una glorieta de diámetro pequeño, una isla o bahías para giro, siempre que el terreno disponible lo permita.
En cualquiera de estos casos parece más conveniente no instalar semáforos, sino mejorar la intersección utilizando otros medios. La preocupación primordial debe ser reducir demoras y accidentes.
CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-1
3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA EL CONTROL DEL TRÁNSITO DE VEHÍCULOS
3.1 Aspectos generales Las características de los semáforos que interesan tanto a los conductores como a los peatones, o sea, su ubicación, diseño, indicaciones y significados legales de los mismos son idénticos tanto para los de tiempo fijo como para los accionados por el tránsito, la diferencia consiste en el mecanismo que los rige. La normalización de estos factores de diseño que afectan el tránsito que debe controlarse es sumamente importante. Las secciones que siguen contienen todas las normas y requerimientos de esta naturaleza y que son aplicables para estos tipos de semáforos.
3.2 DISEÑO CON MIRAS AL FUTURO Un equipo para el control del tránsito siempre debe adquirirse con miras a que su uso en el futuro pueda ser amplio y flexible. Sus posibilidades de modificación (su flexibilidad) que para el momento parezcan innecesarias pueden ser en un futuro deseables a fin de hacer más económica su adaptación a nuevas condiciones.
Un equipo que tenga una vida útil larga siempre será más económico aunque su costo inicial pueda ser más elevado que el de algún tipo de calidad inferior. Debe procurarse evitar la adquisición de los equipos denominados “cajas negras” cuyo uso es seriamente dependiente de quien lo suministra evitando aprovechar en los momentos necesarios las funciones que ofrezca pues la atención posventa es demorada o sujeta a ampliación de contratos de servicio con cláusulas desfavorables al comprador.
3.3 VENTAJAS Y DESVENTAJAS DE LOS SEMÁFOROS Los semáforos son dispositivos valiosos para la regulación del tránsito de vehículos y peatones. Sin embargo, debido a que asignan el derecho de vía a los movimientos del tránsito en forma alternada, ejercen una gran influencia en el flujo vehicular.
Los semáforos si se instalan y funcionan correctamente, aportarán una o más de las siguientes ventajas:
a) Evitar conflictos entre vehículos o entre éstos y los peatones interrumpiendo periódicamente el tránsito en una vía, y permitiendo el paso libre de vehículos y peatones en la otra.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-2
b) Ordenar el tránsito en un sentido determinado y, en ciertos casos, aumentar la capacidad de los carriles de circulación.
c) Disminuir la frecuencia de accidentes, especialmente colisiones en ángulo recto.
d) Bajo condiciones favorables, pueden ser coordinados para favorecer una circulación continua a una velocidad determinada, en un sentido dado.
Cuando las instalaciones de semáforos se justifican pero están mal proyectadas o, por el contrario, no se justifican y se instalan, ocasionan las siguientes desventajas:
a) Demoras excesivas en el tránsito.
b) Fomentan la desobediencia a las indicaciones de los semáforos.
c) Inducen a usar rutas menos convenientes, para evitar dichos dispositivos.
d) Incrementan significativamente la frecuencia de ciertos accidentes (especialmente las colisiones por atrás).
Es oportuno comentar la práctica en nuestro medio de colocar semáforos “políticos” cuya justificación no es técnica sino promovida por personajes políticos o influyentes sobre los encargados de las decisiones de su instalación generando los problemas que trata el párrafo anterior.
3.4 Número de lentes por cara de semáforo De acuerdo a las recomendaciones del Departamento del Distrito Federal de México, 1987, las caras de un semáforo, excepto las de semáforos para peatones, deben tener por lo menos tres lentes: rojo, amarillo y verde. Pero no más de cinco (Ver Figura 10) en el caso de que se agreguen lentes con flechas direccionales con el fin de dar indicaciones para la circulación de frente, de giro a la derecha o a izquierda.
El intervalo amarillo sirve para las siguientes funciones importantes de regulación del tránsito, que con un semáforo que solo tenga rojo y verde no podría cumplirse satisfactoriamente (Ver Figura 11).
a) Actúa como un indicador de transición al final del intervalo de verde y alerta al tránsito en el sentido contrario del cambio de fase. En Colombia y Cuba, por ejemplo, se utiliza un intervalo con las indicaciones roja y amarilla simultáneas antes de un verde (Denominado intervalo rojo-amarillo o R/A) para alertar a los conductores que se aproximan a la indicación verde reduciendo el tiempo perdido en el arranque o λ1.
b) Sirve como período de despeje del tránsito dentro de la intersección y de aquellos vehículos tan próximos a la misma que sería peligroso forzarlos a detenerse. El diseño de la duración de la indicación amarilla se trata en el aparte 5.5.4.1 Amarillo (AM) más adelante.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-3
c) El amarillo intermitente es importante como señal de advertencia cuando esta luz no indica transición entre intervalos de "PARE" y "SIGA".
En ningún caso debe usarse una luz amarilla intermitente en todos los accesos a una intersección. La luz intermitente debe indicar amarillo para la vía principal y rojo para todas las demás vías secundarias, o rojo intermitente para todos los sentidos.
FIGURA 10. Posición de lentes en un semáforo vertical de cinco lentes.
FIGURA 11. Ilustración de los intervalos de una fase del semáforo
Fuente: Elaboración propia.
CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-4
3.5 COLOR Y POSICIÓN DE LAS LENTES De acuerdo al Departamento del Distrito Federal de México, 1987. Es aconsejable que el soporte de la cara de los semáforos sea vertical y las lentes colocadas de arriba a abajo, en el siguiente orden: primero la roja, en el centro la amarilla y abajo la verde.
Cuando se use disposición horizontal, se seguirá la misma secuencia de colores de izquierda a derecha.
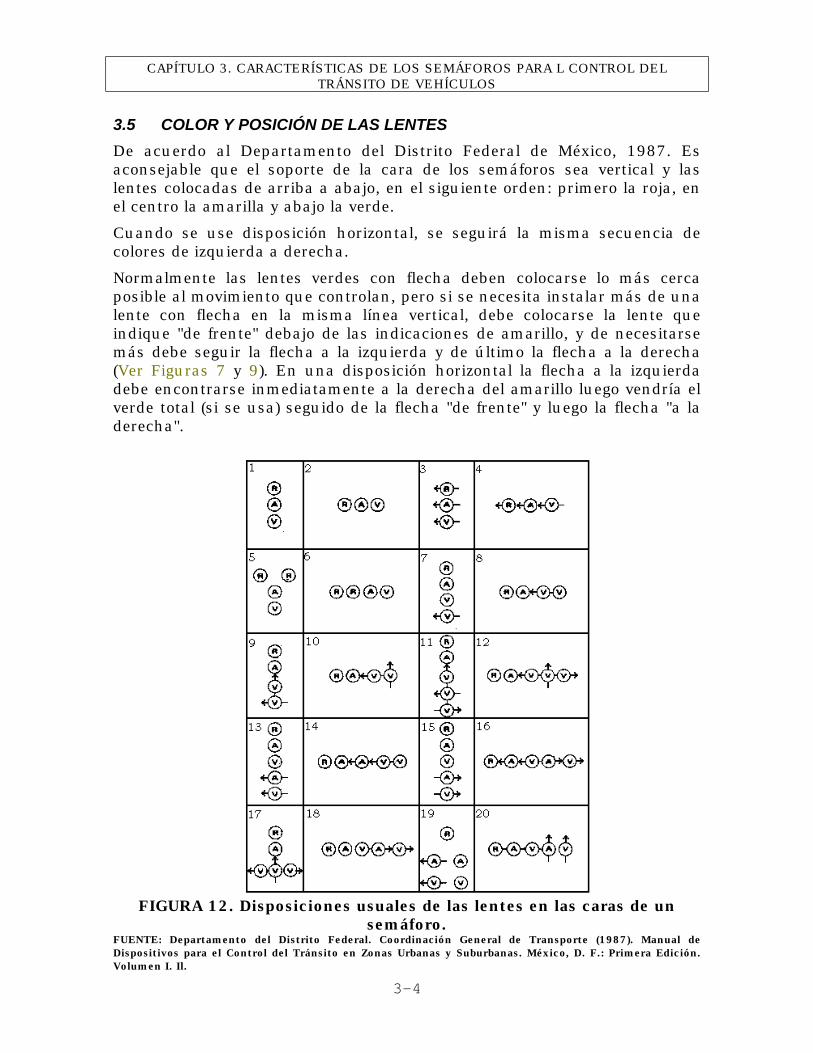
Normalmente las lentes verdes con flecha deben colocarse lo más cerca posible al movimiento que controlan, pero si se necesita instalar más de una lente con flecha en la misma línea vertical, debe colocarse la lente que indique "de frente" debajo de las indicaciones de amarillo, y de necesitarse más debe seguir la flecha a la izquierda y de último la flecha a la derecha (Ver Figuras 7 y 9). En una disposición horizontal la flecha a la izquierda debe encontrarse inmediatamente a la derecha del amarillo luego vendría el verde total (si se usa) seguido de la flecha "de frente" y luego la flecha "a la derecha".
FIGURA 12. Disposiciones usuales de las lentes en las caras de un
semáforo. FUENTE: Departamento del Distrito Federal. Coordinación General de Transporte (1987). Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. México, D. F.: Primera Edición. Volumen I. Il.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-5
3.6 DISTRIBUCIÓN DE LAS LENTES EN LAS CARAS DE LOS SEMÁFOROS Las lentes en la cara de un semáforo se distribuyen linealmente en forma vertical u horizontal. Si están distribuidas verticalmente, todas las lentes rojas y con flecha deberán colocarse en la parte superior. En los semáforos horizontales las lentes rojas se encontrarán a la izquierda de todas las lentes amarillas. (Ver Figura 12)
En las caras de los semáforos dispuestos verticalmente, la lente amarilla deberá encontrarse entre la lente o lentes rojas y todas las demás lentes verdes (Ver Figura 12, casos 1, 5 y 9). La lente verde irá debajo. Cuando haya lentes con flechas direccionales, se deberán colocar en el siguiente orden descendente: flecha de frente, flecha hacia la izquierda y, por último, flecha a la derecha. En caso de existir las tres flechas se suprimirá la lente verde. (Ver Figura 12, caso 11).
Cada lente con FLECHA AMARILLA deberá colocarse inmediatamente arriba de la lente con FLECHA VERDE, a la cual se aplica (Ver Figura 12, caso 13, 15 y19). Cuando se utilice una lente con flechas de indicación variable (que pueda mostrar una flecha verde o una amarilla), las lentes deberán encontrarse en la misma posición con respecto a las otras lentes, tal como está la de FLECHA VERDE en la cara de un semáforo dispuesto verticalmente (Ver Figura 12, caso 19).
En semáforos dispuestos horizontalmente, las lentes con FLECHA AMARILLA deberán encontrarse inmediatamente a la izquierda de las de FLECHA VERDE (Ver Figura 12, casos 14, 16, 18 y 20).
Cuando se utilice una lente con flecha de indicación variable (una flecha verde y una amarilla), en lente con FLECHA DE GIRO A LA IZQUIERDA deberá encontrarse inmediatamente a la derecha de la lente AMARILLA (Ver Figura 12, casos 16 y 20). La lente con FLECHA PARA SEGUIR DE FRENTE deberá encontrarse inmediatamente a la derecha de la lente con FLECHA DE GIRO A LA IZQUIERDA, y la lente de FLECHA DE GIRO A LA DERECHA deberá encontrarse a la derecha de todas las demás lentes (Ver Figura 12, caso 20).
Las posiciones más comunes de las lentes en la cara del semáforo serán como sigue:
1) Semáforo con distribución vertical. En la cara de un semáforo con distribución vertical de arriba hacia abajo: • ROJA. • FLECHA ROJA de giro a la izquierda. • FLECHA ROJA de giro a la derecha. • AMARILLA • VERDE • FLECHA AMARILLA de frente
CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-6
• FLECHA VERDE de frente • FLECHA AMARILLA de giro a la izquierda • FLECHA VERDE de giro a la izquierda • FLECHA AMARILLA de giro a la derecha • FLECHA VERDE de giro a la derecha
2) Semáforo con distribución horizontal. En la cara de un semáforo con distribución horizontal de izquierda a derecha: • ROJA • FLECHA ROJA de giro a la izquierda • AMARILLA • FLECHA AMARILLA de giro a la izquierda • FLECHA VERDE de giro a la izquierda • VERDE • FLECHA AMARILLA de frente • FLECHA VERDE de frente • FLECHA AMARILLA de giro a la derecha • FLECHA VERDE de giro a la derecha Ver Figura 12.
3) Grupos de semáforos. En un grupo de semáforos de una intersección, las caras de los semáforos instalados para controlar una misma vía, deben tener indicaciones idénticas ya sea que las caras estén distribuidas vertical u horizontalmente. Si las indicaciones adyacentes de un grupo no son idénticas, su distribución deberá ajustarse a lo establecido en los párrafos anteriores.
Pueden utilizarse las caras con las indicaciones básicas horizontales y verticales en el mismo acceso, siempre y cuando estén separados para satisfacer los requerimientos de espaciamiento lateral, indicados en el numeral 3.13. de este capítulo.
3.7 Significado de los colores y LAS flechas 3.7.1 Con LUZ VERDE (exclusivamente). "SIGA". Los vehículos que avancen hacia el semáforo, podrán seguir de frente o girar a la derecha o a la izquierda, a menos que alguna señal prohiba dichos movimientos. Los vehículos con derecho de vía, lo cederán a los vehículos y peatones que aún permanezcan en la intersección. Los transeúntes que avancen hacia el semáforo podrán cruzar, a menos que un semáforo especial para peatones indique lo contrario.
3.7.2 Con luz AMARILLA FIJA. "TRANSICIÓN". Advierte a los conductores de los vehículos que está a punto de aparecer la luz roja de "PARE", y que deben empezar a detenerse. Advierte a los peatones, excepto cuando haya lente para peatones que indique lo contrario, que no disponen de tiempo

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-7
suficiente para cruzar. Debe usarse un intervalo amarillo que siga a cada intervalo verde normal y si es posible a cada intervalo de verde con flecha para despejar la intersección.
Sirve para dar tiempo a que se despeje el tránsito en una intersección, y evitar frenadas bruscas de los automóviles. Algunas circunstancias especiales, tales como topografía, dimensiones del cruce, altas velocidades de aproximación, pendientes fuertes o tránsito intenso de camiones pesados, demandarán un tiempo mayor que el normal para despejar la intersección; en tal caso, se empleará el intervalo normal de luz amarilla fija, seguido de luz roja en todas las direcciones (“Todo rojo” o RR) durante otro tiempo adicional, para que pueda despejarse totalmente la intersección. Ver Figura 11.
Los intervalos amarillos deberán tener como mínimo 3 segundos. Se recomienda que el máximo sea de cinco segundos. Aunque intervalos mayores de cinco segundos ocasionalmente pueden ser necesarios en intersecciones muy anchas, estos causan impaciencia en los conductores que esperan el cambio, los que comienzan a circular antes que aparezca el verde. Bajo estas condiciones se recomienda suplir el intervalo amarillo con un intervalo "de todo rojo" después del intervalo amarillo, con lo cual se logra el despeje de toda la intersección antes que comience a fluir el tránsito cruzado.
En ningún caso se cambiará de luz verde a luz roja fija, sin que antes aparezca el amarillo fijo durante el tiempo necesario para despejar el cruce. En semáforos peatonales esta indicación es equivalente al verde intermitente.
Coloquialmente podría decirse que el amarillo fijo significa: deténgase si puede hacer esta maniobra con seguridad, en caso contrario, continúe su recorrido sin acelerar. En los apartes 5.5.4.1 y 5.5.4.2 se explica el diseño de estos intervalos.
3.7.3 Con luz ROJA (exclusivamente). "PARE". El tránsito que avance hacia el semáforo, se detendrá en la línea de detención o frente al semáforo, en la línea de los paramentos transversales más próximos, si aquella no existe. Los peatones que avancen hacia el semáforo, no cruzarán la vía a menos que puedan hacerlo sin riesgo y sin estorbar el tránsito de vehículos o cuando un semáforo especial o lente les permita el paso. El control del tránsito con semáforos se complementa o confirma con señales que pueden incluir alguna que establezca la prioridad de circulación peatonal la cual deberá atenderse.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-8
3.7.4 Con luz en FLECHA VERDE de frente (exclusivamente). Los vehículos que avancen hacia el semáforo podrán seguir de frente, pero no deberán dar vuelta a la derecha ni a la izquierda, y deben ceder el paso a otros vehículos o peatones que aún estén dentro del cruce.
Los peatones que caminen de frente al semáforo podrán cruzar, salvo que un semáforo especial lo prohiba.
3.7.5 Con luz en FLECHA VERDE de giro a la izquierda o a la derecha, sola o con luz en la lente verde, amarilla, roja fija o flecha de frente. El tránsito que avance hacia el semáforo, obedecerá la indicación de la lente verde, amarilla, roja o flecha de frente, como si esta indicación estuviera sola, con la salvedad de que el tránsito, para seguir la circulación indicada, entrará a la intersección con todo cuidado.
Los peatones que caminen de frente al semáforo, obedecerán la indicación de luz verde, amarilla, roja o de flecha de frente, como si ésta fuera la única señal, a menos que las lentes para peatones den otra indicación.
No es conveniente permitir a los vehículos dar vuelta a la izquierda o a la derecha, mientras esté encendida la luz roja, sin que exista una flecha direccional o una señal con indicaciones al respecto. Si las flechas se iluminan al tiempo que se detiene la circulación de frente, dichas flechas aparecerán conjuntamente con la luz roja. Si aparecen solas (excepto en intersecciones en T, en donde no es posible seguir de frente o en carriles especiales para giros de circulación continua), ocasionan dudas sobre si están o no permitidas otras circulaciones durante el mismo intervalo. Además, los conductores que se aproximan a la flecha la pueden confundir con luz verde fija.
La eficiencia de las flechas se aumenta considerablemente si existen carriles especiales para giros, los cuales deberán tener siempre marcas en el pavimento.
Cuando se desee permitir al tránsito dar determinado giro y se prohiba a los demás seguir de frente, la luz roja para el tránsito de frente se iluminará simultáneamente con la luz verde de giro. Cuando se autorice al tránsito seguir de frente y se le prohiba dar determinado giro, se iluminará junto con la luz verde una flecha verde, indicando la circulación permitida, apagándose la luz roja.
La flecha será la única parte iluminada de la lente, con las dimensiones y formas que indican las Figuras 13 y 14.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-9
FIGURA 13. Flecha direccional en lente de 20 cm.
FUENTE: Departamento del Distrito Federal. Coordinación General de Transporte (1987). Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. México, D. F.: Primera Edición. Volumen I. Il.
FIGURA 14. Flecha direccional en lente de 30 cm.
FUENTE: Departamento del Distrito Federal. Coordinación General de Transporte (1987). Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. México, D. F.: Primera Edición. Volumen I. Il.
En los casos en que la circulación deba detenerse para los giros continuando el paso de frente, se controlará el tránsito con caras independientes en la cabeza de los semáforos, equipadas con flechas direccionales roja, amarilla y verde.
Cuando se vaya a detener la circulación que gira, habrá un intervalo de luz amarilla para despejar el cruce, seguido por otro de luz roja. El objeto de las indicaciones de la citada cara del semáforo, deberá aclararse tanto por su ubicación como por medio de señales complementarias.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-10
3.7.6 Con luz ROJA intermitente (PARE obligatorio). Cuando se ilumine una luz roja con destellos intermitentes los vehículos se detendrán en la línea antes de entrar a la intersección, y el derecho de vía quedará sujeto a las normas aplicables para indicaciones de PARE. No se usarán señales de PARE simultáneamente con semáforos de destello rojo.
3.7.7 Con luz AMARILLA intermitente (precaución). El semáforo de destello amarillo es importante como señal de precaución. En ningún caso se instalarán semáforos de destello amarillo en todas las vías que converjan en una intersección. El destello amarillo se debe emplear en la vía que tenga la preferencia y el destello rojo en los demás accesos. Cuando esté iluminada una lente amarilla con destello intermitente, los conductores de vehículos podrán continuar con precauciones especiales. La luz amarilla fija no deberá utilizarse como señal de PRECAUCION.
3.8 APLICACIÓN DE LOS COLORES Y FLECHAS Las indicaciones básicas utilizadas en la operación de los semáforos y sus aplicaciones son las siguientes:
3.8.1 Rojo fijo. Deberá aparecer cuando se desee prohibir el tránsito, salvo el de peatones dirigido por una señal establecida para tal efecto, entre la intersección o en alguna otra zona controlada.
3.8.2 Amarillo fijo. Deberá aparecer inmediatamente después del VERDE en la misma cara del semáforo, salvo cuando esta cara controle un carril exclusivo para giro a la izquierda, donde el VERDE sigue una FLECHA VERDE. Una alternativa es que una FLECHA AMARILLA siga a una FLECHA VERDE en una cara distinta del semáforo utilizada exclusivamente para controlar un movimiento en un solo sentido.
3.8.3 Verde fijo. Se usará únicamente para permitir que el tránsito avance en cualquier sentido.
3.8.4 Las flechas VERDE, AMARILLA y ROJA fijas, pueden utilizarse en lugar de las luces correspondientes, en los siguientes casos: a) En un acceso que se intercepta con una calle de un solo sentido.
b) En un acceso donde estén prohibidos algunos movimientos.
c) En un acceso a una intersección que tenga carril exclusivo para giro.
CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-11
d) Donde los movimientos en el acceso no empiecen o terminen al mismo tiempo, y sea posible que el tránsito perciba claramente las indicaciones sobre el giro y otros movimientos permitidos.
3.8.5 Uso de las indicaciones de las flechas fijas a) La FLECHA ROJA fija, únicamente en una cara distinta, siempre que el
semáforo también contenga una FLECHA AMARILLA y una FLECHA VERDE fijas. Se utilizará para controlar exclusivamente un solo movimiento de la circulación.
b) La FLECHA AMARILLA fija después de una FLECHA VERDE que haya aparecido al mismo tiempo que la lente ROJA en la misma cara del semáforo, salvo en el siguiente caso: cuando aparezca la FLECHA VERDE para girar a la derecha, (o una flecha para dar giro a la izquierda), para el tránsito en un sólo sentido, seguida inmediatamente solo por el VERDE, ya que durante ese tiempo no hay prohibición alguna para el giro indicado, y no es conveniente que aparezca la FLECHA AMARILLA.
c) La FLECHA AMARILLA fija, deberá seguir a la FLECHA VERDE en la cara del semáforo que se utiliza exclusivamente para controlar el movimiento en un solo sentido.
d) Puede utilizarse la FLECHA AMARILLA fija, para indicar el intervalo que se dispone después de la terminación de la FLECHA VERDE que haya aparecido simultáneamente al VERDE, en la misma cara del semáforo.
e) La FLECHA VERDE fija, deberá utilizarse únicamente para permitir movimientos vehiculares que estén completamente protegidos contra conflictos de los vehículos que estén avanzando durante la luz verde o con peatones cruzando, de acuerdo con la indicación de VERDE PEATONAL o una de VERDE INTERMITENTE PEATONAL o de “NO PASE”.
f) La FLECHA VERDE fija izquierda, se utilizará como la luz verde de una cara del semáforo, controlando el carril para girar exclusivamente a la izquierda, si ese movimiento está protegido por la secuencia de la señal.
3.8.6 Combinaciones inadmisibles en las caras de los semáforos. a) VERDE CON AMARILLO.
b) FLECHA VERDE para seguir de frente con ROJO
c) ROJO CON AMARILLO. Aunque en algunas ciudades de Colombia (O Cuba) se utiliza, antes del verde, para disminuir el tiempo perdido en el arranque de los vehículos en el verde.
d) VERDE CON ROJO

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-12
e) VERDE CON FLECHA ROJA
Las anteriores combinaciones, no deberán aparecer en las distintas caras de los semáforos, en ningún acceso, a menos que una de las caras sea una señal de giro que controle únicamente el carril exclusivo para dar giro, y que las indicaciones sean basándose en flechas.
3.8.7 Operación intermitente. Cuando un semáforo para el control del tránsito sea puesto en operación intermitente, normalmente deberá utilizarse el color amarillo para la vía principal y el rojo para los demás accesos. Serán pertinentes las siguientes aplicaciones, siempre que las señales se coloquen en operación intermitente: a) Deberá aparecer el color amarillo intermitente en lugar de la FLECHA
AMARILLA, la cual puede incluirse en la cara del semáforo.
b) Ningún VERDE, FLECHA VERDE o intermitentes, deberán terminar y seguir inmediatamente al rojo fijo o rojo intermitente, sin que aparezca antes la indicación amarilla fija que señala el cambio; sin embargo, puede hacerse la transición directamente del VERDE o FLECHA VERDE a destellos amarillos.
Todas las caras del semáforo colocado en un acceso, deberán tener una luz intermitente del mismo color salvo las indicaciones de la señal de giro a la izquierda, que puede ser ROJA intermitente, siempre que estén protegidas o colocadas adecuadamente dichas indicaciones, de tal manera que los conductores que se acerquen al acceso no estén expuestos a una confusión visual importante, a causa de las señales de giro a la izquierda.
3.9 Diseño y tamaño de las lentes La unidad óptica de un semáforo consiste de una lente, un reflector paraboloide, bombilla y portabombilla. La lente es aquella parte de la unidad que dirige la luz del bombillo y su reflector hacia el lugar deseado.
Todas las lentes de los semáforos vehiculares deben ser circulares excepto los verdes con flecha que pueden ser rectangulares. Existen dos tamaños típicos para las lentes circulares: 20 centímetros y 30 centímetros de diámetro nominal. (Ver figuras 13 y 14).
La lente de diámetro nominal de 20 centímetros y un diámetro total de no menos de 21.5 centímetros. En tiempos pasados esta medida había sido la única normalizada y por tanto es todavía la de mayor uso.
La lente de diámetro nominal de 30 centímetros debe tener una parte visible no menor de 29 centímetros y un diámetro total no menos de 30.5 centímetros. La experiencia con este tamaño de lente hasta ahora ha sido relativamente limitada, pero ha tenido suficiente éxito para justificar su aceptación, al menos para sitios donde es necesario que el semáforo sea
CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-13
más llamativo. La lente roja de 30 centímetros tiene bastante uso en conjunto con las lentes más pequeñas en amarillo y verde para recalcar la necesidad de "PARE". Sin embargo pueden usarse las tres lentes del tamaño más grande. La lente de 30 centímetros resulta más perceptible que las más pequeñas en lugares donde el semáforo puede ser pasado por alto. Algunos casos donde han sido instalados semáforos con lentes de 30 centímetros son:
a) Intersecciones rurales o en aquellas con velocidades de aproximación muy altas.
b) Intersecciones aisladas o en aquellos sitios donde no es de esperarse que exista un semáforo, tales como el primer semáforo después de una salida de una vía rápida.
c) Sitios con problemas especiales como interferencias o conflictos con anuncios luminosos, etc.
d) Intersecciones donde los conductores observan a la vez semáforos ordinarios y los que regulan los carriles reversibles.
Para dirigir el tránsito vehicular las flechas verdes deben indicar el sentido del movimiento permitido. La flecha debe indicar verticalmente hacia arriba para el movimiento de frente, en dirección horizontal para indicar un giro aproximado a la derecha u oblicua en subida, aproximadamente igual al ángulo si este es lo bastante diferente de un ángulo recto. Es esencial que los conductores que se aproximen puedan reconocer la dirección de la flecha verde desde una distancia por lo menos de 60 metros antes de llegar al semáforo.
Cada flecha con lente debe contener solo una flecha direccional. No se aceptan flechas de dos puntas. La flecha debe ser la única parte iluminada de la lente. Ella debe ser reproducida en la lente con las dimensiones y configuración apropiadas tanto para las lentes de 20 como de 30 centímetros tal como se ilustra en las figuras 13 y 14.
3.10 LEYENDAS SOBRE LAS LENTES. En ningún caso deben usarse leyendas sobre lentes para semáforos vehiculares. La práctica de incrustar palabra tales como "PARE" y "SIGA" en lentes de semáforos vehiculares reduce su efectividad y ya no se recomienda en las normas para estos semáforos.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-14
3.11 ILUMINACIÓN DE LAS LENTES. Cada lente debe ser iluminada independientemente. Esto es esencial para obtener uniformidad en la posición de ellas, para darles claridad apropiada, y para proporcionar la flexibilidad necesaria en las indicaciones requeridas. La intensidad de iluminación de las lentes será tal que puedan distinguirse claramente desde una distancia mínima de 400 metros, en condiciones atmosféricas normales.
3.12 VISIBILIDAD Y PROTECCIÓN DE LAS LENTES. Cada cara de semáforo debe ajustarse de tal manera que sus focos sean de máxima efectividad hacia el tránsito que se aproxime en el sentido para el cual está previsto. Viseras, celosías, túneles, rebordes oscuros muchas veces mejoran la efectividad de un semáforo. (Ver Figura 15).
FIGURA 15. Placas de contraste
El diseño irregular de algunas calles frecuentemente necesita situar semáforos para diferentes calles de manera tal que algunas veces las caras solo forman un ángulo relativamente pequeño para las diferentes direcciones. En estos casos cada cara debe ser protegida en lo posible por medio de viseras, túneles o celosías de modo que las indicaciones solas puedan ser vistas por el conductor para el cual están dirigidas.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-15
3.13 UBICACIÓN Y NÚMERO DE CARAS DE LOS SEMÁFOROS Como mínimo, habrá dos caras para cada acceso, y en su caso, se complementaran con lentes para peatones ubicados en los extremos de cada paso peatonal. La doble cara del semáforo permite ver la indicación, aunque una de ellas esté tapada momentáneamente por camiones o autobuses, y representa un factor de seguridad en casos de luz excesiva de anuncios luminosos, de resplandor del sol o cuando se funda algún bombillo. Ver Figura 16. En dicha figura los semáforos están colocados después de la intersección pero la práctica colombiana es ubicarlos antes de ella lo cual trae inconvenientes que se comentarán más adelante planteando alternativas de solución.
FIGURA 16. Ubicación de semáforos y número mínimo de caras
FUENTE: Departamento del Distrito Federal. Coordinación General de Transporte (1987). Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. México, D. F.: Primera Edición. Volumen I. Il.
La necesidad de instalar más de dos caras de semáforo por acceso, dependerá de las condiciones locales especiales, tales como número de carriles, las indicaciones direccionales si las hay, la geometría de la intersección, etc. (Ver Figura 17).

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-16
El factor más importante para la colocación de las caras del semáforo deberá ser su visibilidad ante el conductor. En la Figura 18 se muestra el campo total visual humano definido por un cono que abarca un ángulo horizontal de 160° y vertical de 115°, dentro de él se especifica una zona más pequeña en la cual los objetos pueden percibirse indirectamente y dentro de ella hay un área limitada horizontalmente por un ángulo de 6° y verticalmente por otro de 4° dentro de la cual se tiene agudeza visual suficiente para la lectura. Este campo visual experimenta obstáculos cuando el conductor viaja dentro del vehículo ya que hacia delante solo tiene libre el espacio del parabrisas; la visión hacia atrás del vehículo se realiza mediante la ayuda de los espejos retrovisores (derecho, izquierdo e interno). En la Figura 19 se indica la cobertura reducida como consecuencia de los obstáculos a la visión impuestos por el interior del vehículo dada en términos de ángulos horizontales y verticales.
FIGURA 17. Ubicación de semáforos y número recomendado de caras.
FUENTE: Departamento del Distrito Federal. Coordinación General de Transporte (1987). Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. México, D. F.: Primera Edición. Volumen I. Il.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-17
FIGURA 18. Campo visual (Hobbs y Richardson, 1967)
Fuente: Mencionado en: CORRÊA DA ROCHA, Luiz Paulo y ALVES BORGES, Comba Maria. Efeitos do posicionamiento dos semáforos no tráfego. (1988) COPPE - Universidade Federal do Rio de Janeiro. Rio de Janeiro, Brasil. En: Memorias del IV Congreso Panamericano de Ingeniería de Tránsito y Transporte. Mayaguez, Puerto Rico.
FIGURA 19. Campo de visión desde el interior del vehículo
Fuente: Mencionado en: CORRÊA DA ROCHA, Luiz Paulo y ALVES BORGES, Comba Maria. Efeitos do posicionamiento dos semáforos no tráfego. (1988) COPPE - Universidade Federal do Rio de Janeiro. Rio de Janeiro, Brasil. En: Memorias del IV Congreso Panamericano de Ingeniería de Tránsito y Transporte. Mayaguez, Puerto Rico.
En la Figura 20 se presentan dos propuestas de CORRÊA DA ROCHA, L. P. y ALVES B., C. M., 1988, de sitios para colocar estos elementos basados en la condición de visibilidad interna al vehículo y la posibilidad de no tener o tener una cara de semáforo en el poste repetidora de las indicaciones de la

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-18
cara que va en la ménsula y reservando espacio para el cruce peatonal. Estas propuestas se plantean para el caso de necesitarse colocar los semáforos antes de la intersección como es el caso colombiano. Los conductores que se aproximan a una intersección o a zonas provistas de semáforos, como en el caso de un cruce peatonal a la mitad de una cuadra, deben disponer de una indicación clara e inequívoca de la asignación del derecho de paso que les corresponda.
FIGURA 20. Ubicación de postes y ménsulas
Fuente: CORRÊA DA ROCHA, Luiz Paulo y ALVES BORGES, Comba Maria. Efeitos do posicionamiento dos semáforos no tráfego. (1988) COPPE - Universidade Federal do Rio de Janeiro. Rio de Janeiro, Brasil. En: Memorias del IV Congreso Panamericano de Ingeniería de Tránsito y Transporte. Mayaguez, Puerto Rico.
Los elementos críticos son los ángulos laterales y la vertical de la visual hacia la cara del semáforo, determinados por la visión del conductor, el vehículo de proyecto y la posición vertical, longitudinal y lateral de la cara del semáforo. Deberá analizarse la geometría de cada intersección, donde se pretenda instalar semáforos, incluyendo la pendiente y las curvas horizontales, para ubicar la cara del semáforo.
La visibilidad, ubicación y número de caras del semáforo para cada acceso a la intersección o cruce para peatones a mitad de la cuadra, deberá realizarse como se indica a continuación:
a) Los semáforos deberán ser visibles continuamente, por lo menos desde un punto situado en las distancias indicadas en la tabla siguiente, antes de la línea de detención, a menos que exista una obstrucción física de su visibilidad.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-19
TABLA 3. Distancia de visibilidad mínima en metros.
85% de la velocidad (km/h) Distancia de visibilidad mínima en metros
30 30 40 55 50 75 55 100 65 120 70 145 80 170 90 190 95 215
En el acceso a una intersección en T (donde no hay tránsito de frente), deberá indicarse, por lo menos, sobre los movimientos para girar, de conformidad con los requerimientos recién mencionados.
b) Deberá utilizarse caras de semáforos diferentes cuando los movimientos para girar estén controlados exclusivamente por FLECHAS VERDES.
c) Cuando las condiciones físicas impidan que los conductores puedan tener a la vista por lo menos dos indicaciones del semáforo, como se ha especificado, deberá colocarse una señal apropiada para prevenir el tránsito que se está aproximando. El semáforo utilizado en esta forma, puede estar interconectado con el control de semáforos de tránsito, de tal manera que aparezca una luz amarilla intermitente durante el período en que los conductores pasen por él, a la velocidad permitida en la calzada, y se encuentren la luz roja a su llegada al semáforo.
d) Se deberá usar un semáforo con una sola cara, para el control del carril exclusivo para girar. Dicha cara deberá ser adicional al mínimo de las caras del semáforo para el tránsito de frente. Las indicaciones de la cara o caras de semáforos separados que controlen solamente el carril exclusivo para girar, deberán ser visibles también al tránsito con otros movimientos permitidos, por lo que deberá colocarse una señal de GIRO A LA IZQUIERDA (o A LA DERECHA), adyacente a cada cara de dicho semáforo.
e) Cuando la cara consista en su totalidad de indicaciones basado en flechas, no se requiere dicha señal.
f) Excepto cuando el ancho de la calle que se intercepta u otras condiciones lo hagan físicamente impráctico, por lo menos una o de preferencia las dos caras del semáforo requeridas por el apartado
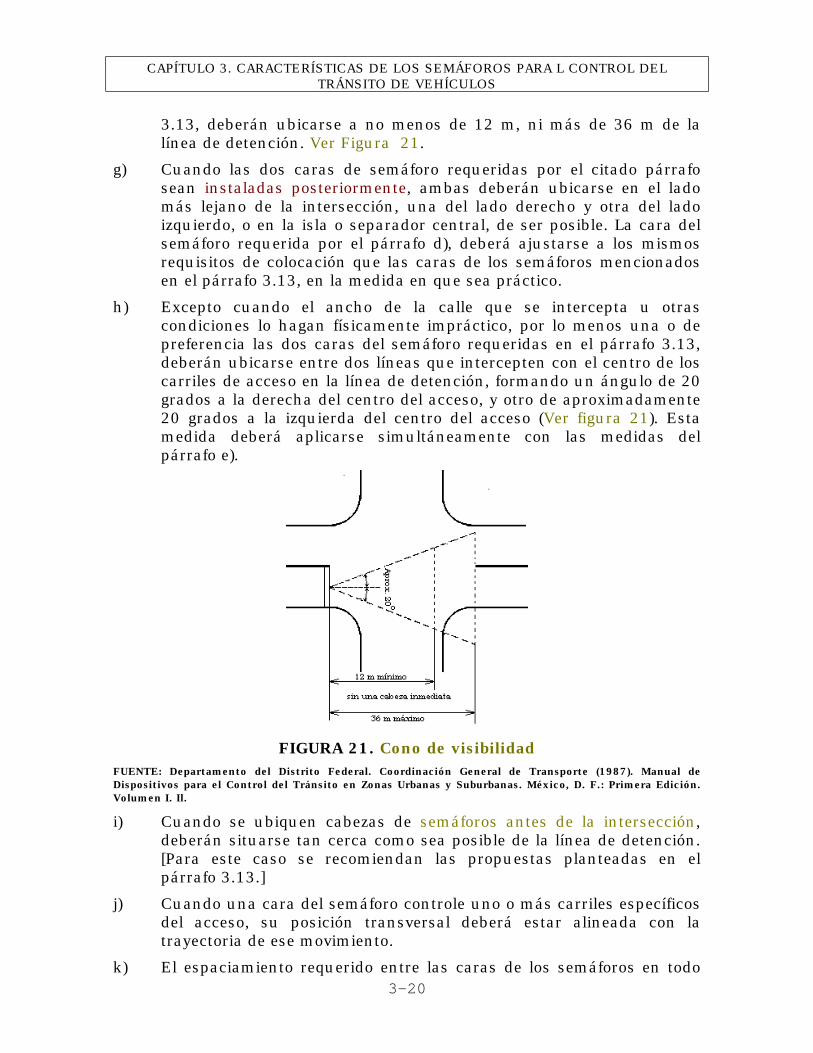
CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-20
3.13, deberán ubicarse a no menos de 12 m, ni más de 36 m de la línea de detención. Ver Figura 21.
g) Cuando las dos caras de semáforo requeridas por el citado párrafo sean instaladas posteriormente, ambas deberán ubicarse en el lado más lejano de la intersección, una del lado derecho y otra del lado izquierdo, o en la isla o separador central, de ser posible. La cara del semáforo requerida por el párrafo d), deberá ajustarse a los mismos requisitos de colocación que las caras de los semáforos mencionados en el párrafo 3.13, en la medida en que sea práctico.
h) Excepto cuando el ancho de la calle que se intercepta u otras condiciones lo hagan físicamente impráctico, por lo menos una o de preferencia las dos caras del semáforo requeridas en el párrafo 3.13, deberán ubicarse entre dos líneas que intercepten con el centro de los carriles de acceso en la línea de detención, formando un ángulo de 20 grados a la derecha del centro del acceso, y otro de aproximadamente 20 grados a la izquierda del centro del acceso (Ver figura 21). Esta medida deberá aplicarse simultáneamente con las medidas del párrafo e).
FIGURA 21. Cono de visibilidad
FUENTE: Departamento del Distrito Federal. Coordinación General de Transporte (1987). Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. México, D. F.: Primera Edición. Volumen I. Il.
i) Cuando se ubiquen cabezas de semáforos antes de la intersección, deberán situarse tan cerca como sea posible de la línea de detención. [Para este caso se recomiendan las propuestas planteadas en el párrafo 3.13.]
j) Cuando una cara del semáforo controle uno o más carriles específicos del acceso, su posición transversal deberá estar alineada con la trayectoria de ese movimiento.
k) El espaciamiento requerido entre las caras de los semáforos en todo

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-21
acceso, sea como mínimo de 2.50 m, medidos horizontalmente entre los centros de dichas caras.
l) Cuando la cara más próxima necesite estar a más de 36 metros de la línea de detención, deberá colocarse un semáforo adicional antes de la intersección.
m) Si la cabeza del semáforo está suspendida por cables o por ménsula, deberá ubicarse tan cerca como sea posible de la visual normal del conductor.
n) Se usarán caras adicionales en los semáforos, cuando un estudio de ingeniería de tránsito justifique que son necesarias para obtener la visibilidad anticipada e inmediata a la intersección. Cuando esto suceda, se colocarán de tal manera que se logre la visibilidad óptima para realizar el movimiento que controlan. Se establecen las siguientes limitaciones:
• No deberán utilizarse flechas para girar a la izquierda en caras del lado derecho.
• No deberán utilizarse flechas para girar a la derecha en caras del lado izquierdo.
Un semáforo instalado sobre el separador central, se considerará como un semáforo para el giro a izquierda. En los cruces con semáforos a mitad de cuadra, deberá haber por lo menos una cara del semáforo en cada acceso a lo largo de la calzada recorrida. Por otra parte, un semáforo para el control del tránsito a mitad de cuadra, deberá satisfacer los requerimientos establecidos a continuación:
• Cuando la cara transversal del semáforo se encuentre instalada en la parte superior de un poste o en una ménsula corta se ajustará a lo indicado en el numeral 3.15.
• Las lentes adicionales para peatones, se utilizarán únicamente cuando se justifiquen de acuerdo a lo estipulado en la sección correspondiente.
3.14 SEÑALES AUXILIARES. Cuando se necesiten señales auxiliares éstas deben ser reflectivas o preferiblemente iluminadas y estarán adheridas en un sitio adyacente a un poste del semáforo. Las caras del semáforo y las señales auxiliares serán montadas en tal forma que conformen una unidad.
Donde se usen conjuntamente con semáforos leyendas iluminadas, éstas deben ser diseñadas y montadas de tal manera que se eviten reflejos o encandilamiento a consecuencia de esta combinación. Al semáforo debe dársele la posición predominante.
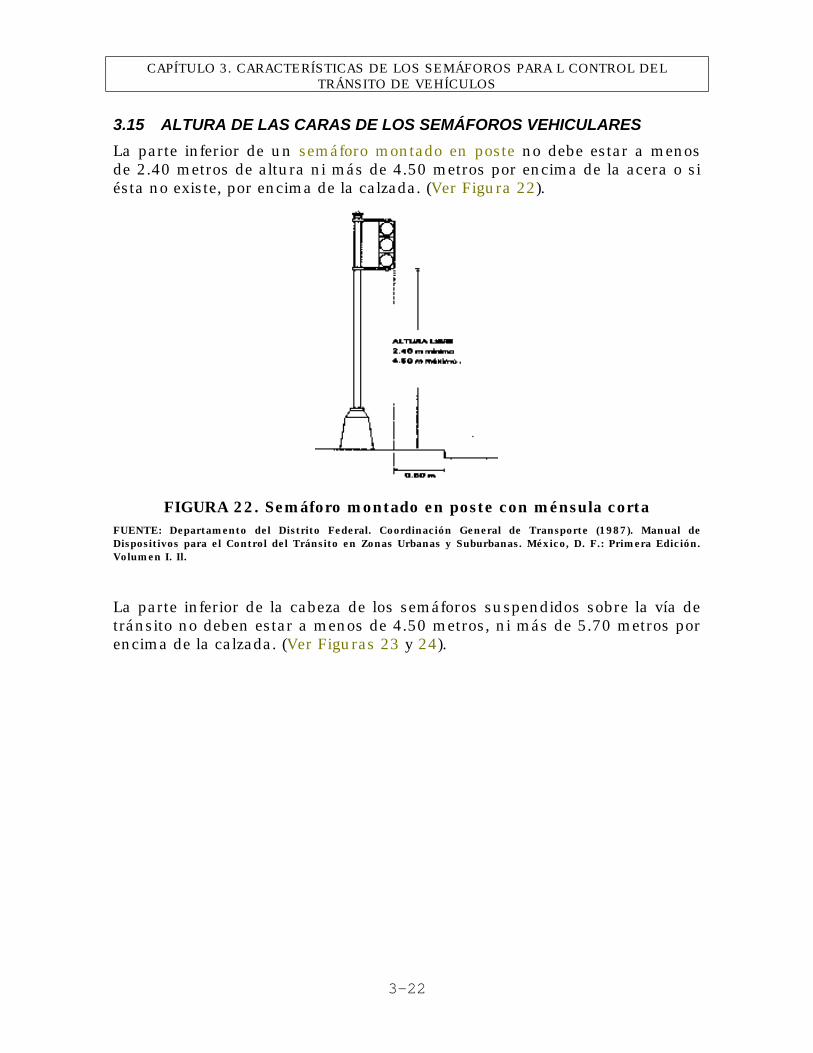
CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-22
3.15 ALTURA DE LAS CARAS DE LOS SEMÁFOROS VEHICULARES La parte inferior de un semáforo montado en poste no debe estar a menos de 2.40 metros de altura ni más de 4.50 metros por encima de la acera o si ésta no existe, por encima de la calzada. (Ver Figura 22).
FIGURA 22. Semáforo montado en poste con ménsula corta
FUENTE: Departamento del Distrito Federal. Coordinación General de Transporte (1987). Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. México, D. F.: Primera Edición. Volumen I. Il.
La parte inferior de la cabeza de los semáforos suspendidos sobre la vía de tránsito no deben estar a menos de 4.50 metros, ni más de 5.70 metros por encima de la calzada. (Ver Figuras 23 y 24).
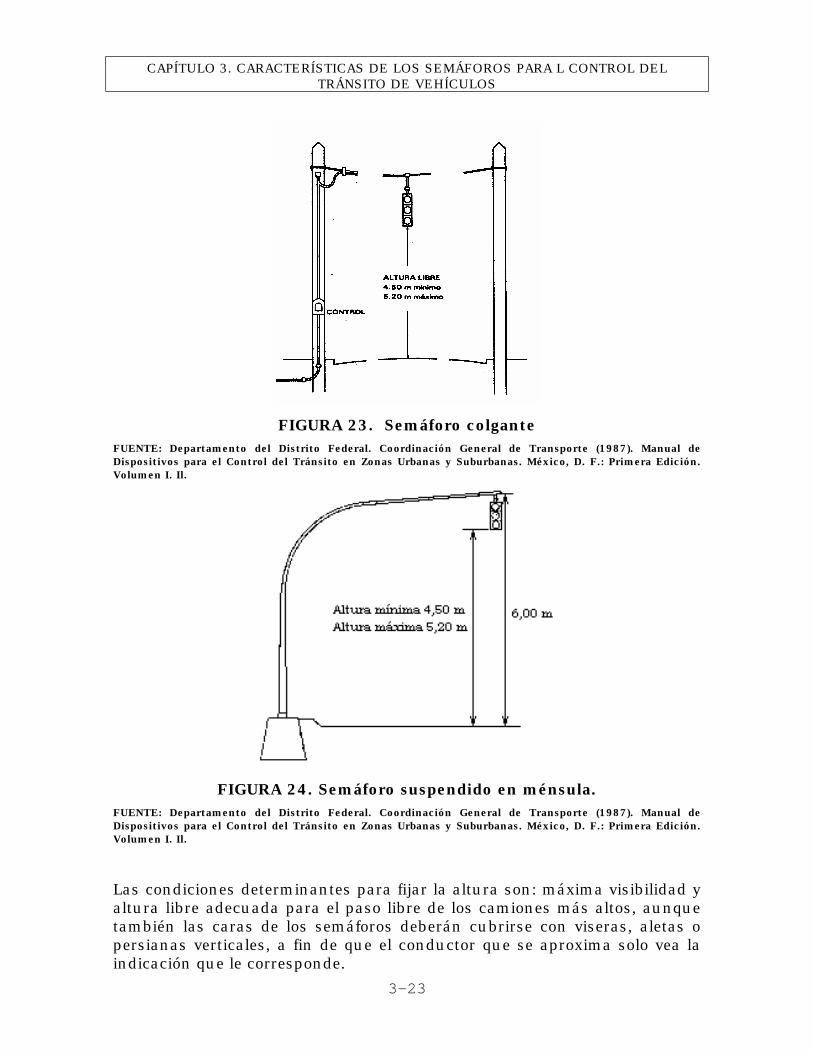
CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-23
FIGURA 23. Semáforo colgante
FUENTE: Departamento del Distrito Federal. Coordinación General de Transporte (1987). Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. México, D. F.: Primera Edición. Volumen I. Il.
FIGURA 24. Semáforo suspendido en ménsula.
FUENTE: Departamento del Distrito Federal. Coordinación General de Transporte (1987). Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. México, D. F.: Primera Edición. Volumen I. Il.
Las condiciones determinantes para fijar la altura son: máxima visibilidad y altura libre adecuada para el paso libre de los camiones más altos, aunque también las caras de los semáforos deberán cubrirse con viseras, aletas o persianas verticales, a fin de que el conductor que se aproxima solo vea la indicación que le corresponde.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-24
3.16 UBICACIÓN TRANSVERSAL DE LOS SOPORTES DE LOS SEMÁFOROS Existen los siguientes tipos de soportes para cabezas de semáforos:
1. Ubicadas a un lado de la vía.
• Postes.
• Ménsulas cortas.
2. Suspendidas sobre la vía.
• Ménsulas largas en postes laterales.
• Suspensión de cables.
• Postes o pedestales en isletas.
Los soportes de las cabezas de los semáforos, permitirán ajustes angulares, verticales y horizontales.
La ubicación transversal de los soportes debe ser lo más cercana posible al borde de la acera o del alineamiento de la vía a una distancia no menor de 60 centímetros del borde de la acera. También deben situarse lo más cerca posible a la línea de detención. Un semáforo o su soporte no debe obstruir la acera.
Donde no hay acera el semáforo situado al lado de la vía no debe instalarse a más de 3 metros fuera del borde de la calzada, siempre que no obstruya el uso de la berma.
Una cabeza de semáforo montada en ménsulas o suspendida por cables, es un dispositivo importante y por lo menos debe ser instalado de tal manera que quede dentro de la visual del conductor. Para ofrecer visibilidad, se instalará lateralmente otra cabeza de semáforo auxiliar. Cuando la cabeza colgante regule uno o varios carriles especiales, la cara correspondiente quedará directamente sobre la circulación vehicular que regula, para evitar dudas.
3.17 LÍMITE DEL ÁREA REGULADA POR SEMÁFOROS Un semáforo debe regular exclusivamente la intersección donde está instalado. No es aconsejable usar semáforos distantes para regir cruces intermedios, ya que ésto podría ser peligroso, al obligar a entrar en el cruce peatonal para poder ver el semáforo siguiente.
CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-25
3.18 ELIMINACIÓN DE ANUNCIOS LUMINOSOS QUE CONFUNDAN Se prohibe la instalación de cualquier señal, demarcación o aviso sin autorización y que interfiera la efectividad de cualquier dispositivo de regulación del tránsito oficial. La promulgación de esta previsión es muy importante. Si se puede hacer cumplir se logrará entre otras cosas reducir la seria confusión causada por anuncios y luces similares a las de control del tránsito en lugares de interferencia.
3.19 EFICIENCIA Y CONTINUIDAD DE OPERACIÓN La utilidad de los semáforos depende de que se encuentre funcionando todo el tiempo de acuerdo a las necesidades del tránsito en el momento. El mal funcionamiento de los semáforos produce inconvenientes como desobediencia, arbitrariedades, peligros innecesarios que son difíciles de corregir después. Las normas operacionales contenidas en este manual dan por resultado semáforos que funcionan en forma eficaz en intersecciones importantes.
Es de suponer que cualquier persona que se acerque a un semáforo piense que está funcionando correctamente, por lo tanto es indispensable que todos los semáforos existentes funcionen y funcionen bien. En caso de que un semáforo no funcione bien, deberá ponerse en operación intermitente.
Antes de poner en funcionamiento una instalación nueva o cuando por otra razón no estén funcionando los semáforos, estos deberán ser tapados o eliminados para que nadie pueda creer que está fundido algún bombillo.
3.20 CONFLICTOS INESPERADOS DURANTE INTERVALOS DE LUZ VERDE. No se permitirán movimientos que impliquen cambios inesperados de carril, durante intervalos verdes. Únicamente se permitirán cuando:
a) Los riesgos que implican dichos movimientos sean mínimos.
b) Los movimientos sirvan para reducir considerablemente serias demoras de circulación.
c) Los conductores y peatones cuyos movimientos se puedan interferir, estén debidamente advertidos que esos movimientos están permitidos.

CAPÍTULO 3. CARACTERÍSTICAS DE LOS SEMÁFOROS PARA L CONTROL DEL TRÁNSITO DE VEHÍCULOS
3-26
3.21 PINTURA. Todo el equipo que constituye el sistema de semaforización debe ser pintado por lo menos cada dos años o con más frecuencia, si ello fuere necesario, para evitar corrosión y mantener la buena apariencia del mismo.
La frecuencia con que se pinta variará según la pintura, la condición en que se encuentre la superficie de los aparatos, y las condiciones atmosféricas del lugar.
Las piezas internas de visores, celosías, etc. que se usan alrededor de las lentes deben pintarse de negro mate para reducir reflejos de luz hacia afuera.
Los colores utilizados en Colombia para postes y ménsulas son de fondo amarillo o blanco con franjas negras de 30 cm intercaladas hasta una altura de 1,8 metros y el resto del elemento continúa con el color de fondo.

CAPITULO 4. INDICADORES DE EFECTIVIDAD
4-1
4. INDICADORES DE EFECTIVIDAD Al diseñar una intersección controlada por semáforos interesa obtener algunos indicadores o medidas de la efectividad para conocer el grado de satisfacción de los objetivos planteados para su operación. De esa manera puede establecerse el diseño más adecuado o efectivo, desde un punto de vista particular. Se ha tratado ya en la sección 1.3. los distintos objetivos generales que pueden perseguirse en el diseño de una intersección. En esta sección se presentan los indicadores de efectividad más importantes a emplearse en la evaluación de tales diseños.
La medida que se emplea más comúnmente en el diseño de semáforos es la demora (Ver Figura 9) provocada a vehículos y usuarios de los mismos. Esta demora corresponde a la diferencia entre el tiempo que tomaría un vehículo atravesar la intersección en ausencia de otros vehículos (sin detenerse) y el tiempo que toma atravesarla cuando se encuentra en operación. En esta forma las demoras incluyen el efecto del frenado y aceleración de los vehículos además del tiempo durante el cual éste se encuentra detenido. En algunos casos un vehículo puede disminuir la velocidad y luego aumentarla sin haberse detenido en forma completa. Esta demora se llama demora parcial. De lo contrario, el vehículo deberá sufrir una detención completa. El número de detenciones completas se encuentra generalmente asociado al consumo de combustible y a la emisión de contaminantes (ruidos, gases). En condiciones cercanas a la saturación y sobre ella hay otro tipo de demora que toma relevancia y es la denominada demora por sobre saturación de la cual no se tratará en este texto.
En una intersección semaforizada en operación puede medirse la demora utilizando el formato de la Figura 25. Dicho formato tiene un encabezamiento para anotar la información general como identificación de la intersección, el acceso que se observa y el movimiento particular que se estudia, además, la fecha, condiciones atmosféricas, el número del estudio, observador y el nombre de la persona que realiza los cálculos. En un cuadro contiguo se incluyen las operaciones que se recomienda realizar para que se obtenga el indicador en mención. Las columnas del formato se deben llenar así:
HORA (MINUTO INICIAL): Aquí se indica el minuto en que se observa la demora, el cuadro dispone de 16 renglones para igual número de minutos de estudio continuos o discontinuos que en caso de ser necesarios más, obedeciendo a un mayor tamaño muestral, se prepararía un formato con
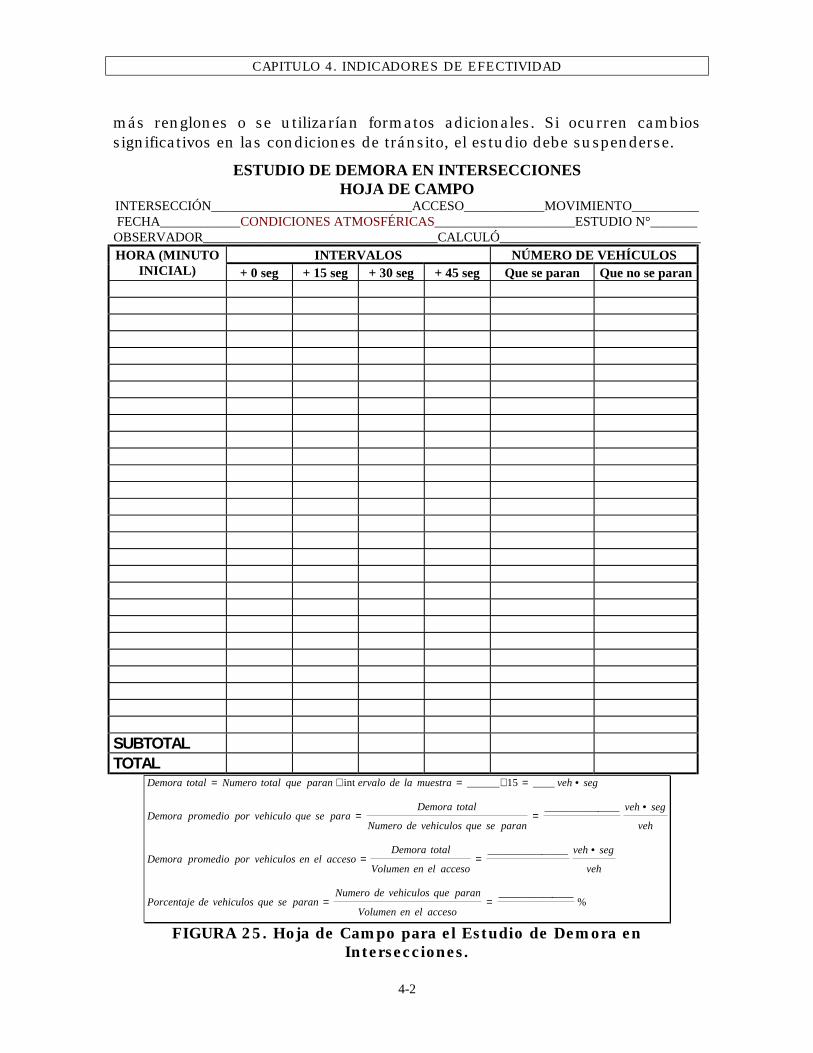
CAPITULO 4. INDICADORES DE EFECTIVIDAD
4-2
más renglones o se utilizarían formatos adicionales. Si ocurren cambios significativos en las condiciones de tránsito, el estudio debe suspenderse.
ESTUDIO DE DEMORA EN INTERSECCIONES HOJA DE CAMPO
INTERSECCIÓN______________________________ACCESO____________MOVIMIENTO__________ FECHA____________CONDICIONES ATMOSFÉRICAS_____________________ESTUDIO N°_______
OBSERVADOR___________________________________CALCULÓ______________________________ INTERVALOS NÚMERO DE VEHÍCULOS HORA (MINUTO
INICIAL) + 0 seg + 15 seg + 30 seg + 45 seg Que se paran Que no se paran SUBTOTAL
TOTAL
%______________
_______________
______________
____15______int
==
•==
•==
•=∗=∗=
accesoelenVolumen
paranquevehiculosdeNumeroparansequevehiculosdePorcentaje
veh
segveh
accesoelenVolumen
totalDemoraaccesoelenvehiculosporpromedioDemora
veh
segveh
paransequevehiculosdeNumero
totalDemoraparasequevehiculoporpromedioDemora
segvehmuestraladeervaloparanquetotalNumerototalDemora
FIGURA 25. Hoja de Campo para el Estudio de Demora en Intersecciones.

CAPITULO 4. INDICADORES DE EFECTIVIDAD
4-3
FUENTE: MORENO C., Luis E., VALENCIA A., Víctor G, y CARO F., Miguel A. (1990) Identificación y solución de sitios críticos de accidentalidad. Vías Urbanas. FASECOLDA. ACCION VIAL PREVENTIVA. Santafé de Bogotá, D. C. Colombia.
INTERVALOS: Esta segunda columna está dividida en otras cuyo número depende de la magnitud de cada intervalo que compone cada minuto, en este ejemplo, aparecen cuatro sub-columnas debido a que cada intervalo dura 15 segundos. Se recomienda que la duración del intervalo no divida en forma exacta la duración del ciclo, para evitar que el aforo repetitivo de vehículos detenidos ocurra en la misma parte del ciclo. En cada sub-columna se anota el número de vehículos del movimiento que se estudia que permanece detenidos en el intervalo de tiempo correspondiente (un vehículo debe contarse dentro de cada uno de los intervalos durante los cuales permanezca detenido en el acceso de la intersección).
NÚMERO DE VEHÍCULOS: En esta tercera columna, dividida en dos, se registra en aquella encabezada con el título “que se paran” el total de vehículos de los intervalos de cada minuto que se detuvieron y en la columna encabezada con el título “que no se paran” se anota el número de vehículos que no se detuvieron en los intervalos de cada minuto. El número de vehículos que se paran es siempre igual o menor que el número total de vehículos que se detiene en el acceso durante un intervalo específico, porque hay vehículos que pueden demorarse más de un período.
El penúltimo renglón del cuadro se titula SUBTOTAL, en él y al final de las columnas “que se paran” y “que no se paran” se registra la sumatoria de tales columnas.
El último renglón llamado TOTAL se anota bajo las columnas “NÚMERO DE VEHÍCULOS”.
Con esta información recopilada y las fórmulas contenidas en el recuadro inferior del formato se calculan los siguientes indicadores relacionados con la demora:
• Demora total: Es el tiempo total que consumieron los vehículos en el período de estudio (en este caso de 16 minutos), en condición de detenidos. Sus unidades son veh*seg.
• Demora promedio por vehículo detenido: Es el promedio de demora que le corresponde a cada vehículo detenido en el período de estudio. Sus unidades son veh*seg/veh o simplemente segundos pero sobrentendiéndose su significado.
• Demora promedio por vehículo en el acceso: Es el promedio de la demora que le corresponde a cada vehículo que pasó por el acceso en el período
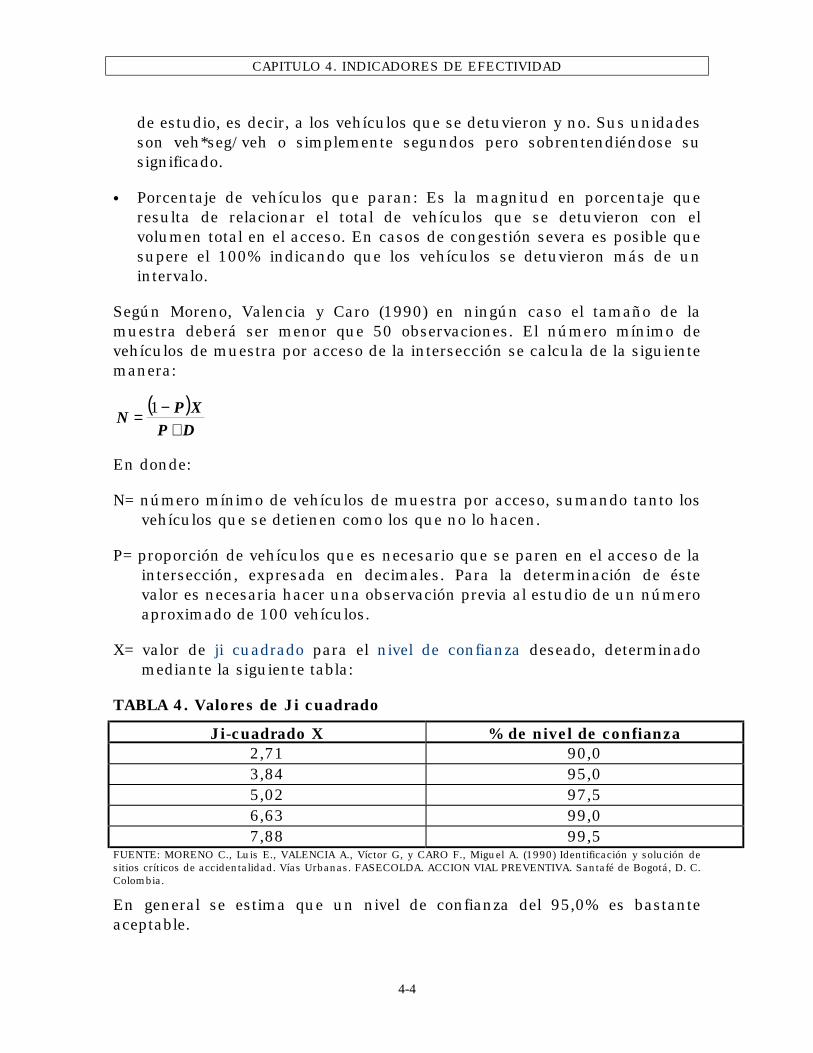
CAPITULO 4. INDICADORES DE EFECTIVIDAD
4-4
de estudio, es decir, a los vehículos que se detuvieron y no. Sus unidades son veh*seg/veh o simplemente segundos pero sobrentendiéndose su significado.
• Porcentaje de vehículos que paran: Es la magnitud en porcentaje que resulta de relacionar el total de vehículos que se detuvieron con el volumen total en el acceso. En casos de congestión severa es posible que supere el 100% indicando que los vehículos se detuvieron más de un intervalo.
Según Moreno, Valencia y Caro (1990) en ningún caso el tamaño de la muestra deberá ser menor que 50 observaciones. El número mínimo de vehículos de muestra por acceso de la intersección se calcula de la siguiente manera:
( )DP
XPN∗
−= 1
En donde:
N= número mínimo de vehículos de muestra por acceso, sumando tanto los vehículos que se detienen como los que no lo hacen.
P= proporción de vehículos que es necesario que se paren en el acceso de la intersección, expresada en decimales. Para la determinación de éste valor es necesaria hacer una observación previa al estudio de un número aproximado de 100 vehículos.
X= valor de ji cuadrado para el nivel de confianza deseado, determinado mediante la siguiente tabla:
TABLA 4. Valores de Ji cuadrado
Ji-cuadrado X % de nivel de confianza 2,71 90,0 3,84 95,0 5,02 97,5 6,63 99,0 7,88 99,5
FUENTE: MORENO C., Luis E., VALENCIA A., Víctor G, y CARO F., Miguel A. (1990) Identificación y solución de sitios críticos de accidentalidad. Vías Urbanas. FASECOLDA. ACCION VIAL PREVENTIVA. Santafé de Bogotá, D. C. Colombia.
En general se estima que un nivel de confianza del 95,0% es bastante aceptable.

CAPITULO 4. INDICADORES DE EFECTIVIDAD
4-5
D= error permitido en la proporción estimada de vehículos que se detienen. Este término puede variar entre 0,01 a 0,10, dependiendo del propósito del estudio. Entre más pequeño sea su valor, mayor precisión se irá a tener.
El consumo de combustible y la emisión de contaminantes son dos indicadores secundarios de la efectividad de la regulación de una intersección por medio de semáforos.
Otro indicador importante (primario) es la longitud media de las colas vehiculares generadas en las calzadas. Este indicador es importante al menos en dos sentidos:
a) Es un indicador de fácil verificación y da una idea visual del nivel de servicio ofrecido por un diseño particular.
b) En casos de alta congestión es necesario verificar que las colas que se formen en las calles no crezcan tanto que obstaculicen la circulación en la intersección de atrás.
La Figura 26 es una gráfica tiempo vs distancia en la que se muestra, en forma horizontal, la línea de detención de un acceso en la intersección semaforizada, los períodos rojo y verde efectivos de 95 y 25 segundos de duración respectivamente resultando un ciclo de 120 segundos.
Para el primer ciclo del semáforo el volumen es de 360 veh/h, es decir, llega un vehículo cada 10 segundos en promedio, 12 en el ciclo y que se han representado por las rectas inclinadas enumeradas del 1 al 12. El primer vehículo llega a la línea de detención sin ningún auto delante de él al principio del rojo, por lo tanto, debe detenerse y esperar hasta el inicio del verde para continuar su trayectoria. El tramo horizontal de la sucesión de rectas representa el tiempo de espera de este primer vehículo y la pendiente de los tramos inclinados la velocidad que lleva en su desplazamiento.
El segundo vehículo que llega 10 segundos después del primero lo hace a una velocidad igual y debe detenerse detrás de él pues arriba durante el rojo; en forma similar que el primero debe esperar detenido un tiempo menor hasta que aparezca el verde para continuar su desplazamiento después que el vehículo que le precede le dé vía.
El comportamiento del segundo vehículo lo experimentan los sucesivos restantes hasta el 12° pero cada uno espera menos tiempo detenido que su antecesor.
La cola de vehículos está representada por la distancia vertical entre la línea de detención y el último vehículo detenido y se puede expresar tanto en
CAPITULO 4. INDICADORES DE EFECTIVIDAD
4-6
metros como en número de vehículos, en la gráfica, esta cola correspondiente al primer ciclo es de 12 vehículos.
Cuando aparece el verde, la cola se descarga lentamente al principio y luego aumenta su tasa hasta estabilizarse haciéndolo con un intervalo de descarga llamado de saturación que para este ejemplo y con propósitos prácticos se considera de 2,5 segundos/vehículo, por lo tanto, durante los 25 segundos de verde solo pueden pasar 10 de los 12 vehículos en cola, los dos vehículos que no lo hacen se denomina cola excedente que avanzaría desde sus posiciones 11° y 12° en la cola del primer ciclo para ocupar las posiciones 1° y 2° de la cola del segundo ciclo.
Para el segundo ciclo ilustrado, el volumen de llegada se ha reducido hasta 180 veh/h, es decir, llega un vehículo cada 20 segundos, 6 autos que corresponden a los vehículos 13° al 18°.
El 13° llega a una velocidad que se ha supuesto igual a la de los demás vehículos pero lo hace durante el rojo del segundo ciclo del semáforo obligándolo a detenerse detrás de los dos vehículos de la cola excedente del ciclo anterior, lo mismo ocurre con los demás vehículos que lo siguen hasta el 17°. Cuando aparece el verde, la cola que se está almacenando se descarga a flujo de saturación correspondiente a una tasa de descarga mayor que la de llegada de vehículos de manera que la cola acumulada se despeja antes de acabar el verde lo cual permite al vehículo 18° llegar y pasar por la línea de detención a la velocidad que trae sin parar. En este caso no se produce cola excedente.
También en esta gráfica pueden identificarse dos comportamientos de los vehículos: el primero, de acumulación en la cola y el segundo, de liberación o desalojo de la misma que se traducen en dos ondas, la densificante y la de liberación; ambas se desplazan hacia atrás de la cola (aguas arriba) pero la primera lo hace más lentamente siendo alcanzada por la segunda en los vértices s1 y s2 de los triángulos dibujados dando como resultado la eliminación de la cola. La primera onda (la densificante) se manifiesta como deceleración de los vehículos de la velocidad que traen hasta cero al detenerse en la cola y la segunda (la liberadora) como la aceleración de ellos desde velocidad cero en la cola hasta alcanzar su velocidad deseada.
En conjunto los dos ciclos ilustrados tienen un volumen de llegada (Demanda) de 270 veh/h y una capacidad (Oferta) de 10 vehículos en 120 segundos, o sea, 300 veh/h. La relación de ambos, es decir, el grado de saturación es de 0,8 que corresponde a condiciones debajo de la saturación.
Por último existen algunos indicadores que forman parte del cálculo de los tiempos de un semáforo y que proporcionan una idea básica del nivel de
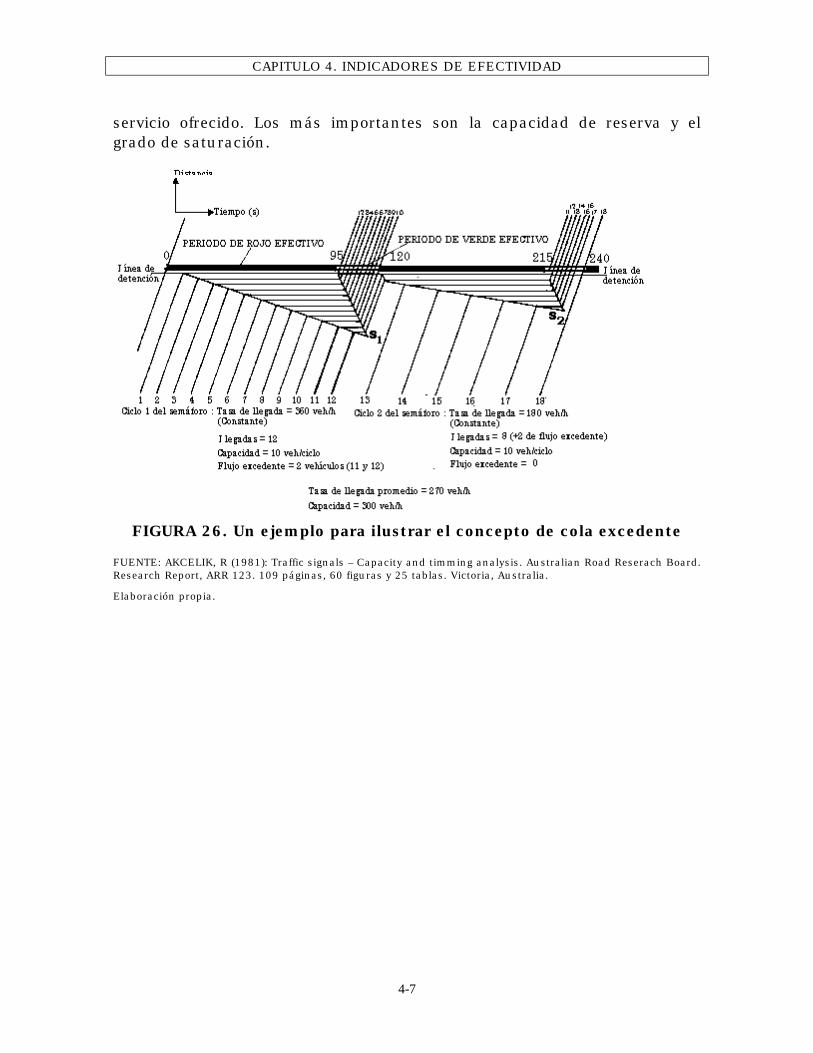
CAPITULO 4. INDICADORES DE EFECTIVIDAD
4-7
servicio ofrecido. Los más importantes son la capacidad de reserva y el grado de saturación.
FIGURA 26. Un ejemplo para ilustrar el concepto de cola excedente
FUENTE: AKCELIK, R (1981): Traffic signals – Capacity and timming analysis. Australian Road Reserach Board. Research Report, ARR 123. 109 páginas, 60 figuras y 25 tablas. Victoria, Australia.
Elaboración propia.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-1
5. SEMÁFOROS DE TIEMPO FIJO
5.1 DEFINICIÓN
Son los que regulan el tránsito de acuerdo con uno o más programas de tiempos determinados previamente y que permanecen invariables. Las características de diseño de estos semáforos, permiten ajustarlos a las variaciones de los volúmenes de los vehículos en períodos de diseño particulares (Pico, valle, otro).
5.2 VENTAJAS DE LOS SEMÁFOROS DE TIEMPOS FIJOS
En las intersecciones donde los volúmenes de tránsito tienen una variación constante, las ventajas del uso de estos semáforos son las siguientes:
a) Facilitan la coordinación combinado con algunos semáforos accionados por el tránsito, especialmente cuando es necesario coordinar los semáforos de varias intersecciones o de un sistema en red. Esta coordinación, puede permitir una circulación progresiva y cierto control de velocidades, por medio de una serie de semáforos debidamente espaciados.
b) Los controladores de semáforos de tiempos fijos no dependen de la circulación de vehículos que pasan por detectores; por lo que su funcionamiento no se afecta desfavorablemente debido a condiciones especiales que impidan la circulación normal frente a un detector, como en el caso de vehículos detenidos o de obras en construcción dentro de la zona de influencia del detector.
c) El control de tiempos fijos puede ser más aceptable que el accionado por el tránsito, en zonas donde exista tránsito peatonal intenso y constante, y en las que pudiera provocar confusión el manejo de semáforos accionados manualmente por peatones.
d) En general, el costo del equipo de tiempos fijos es menor que el del equipo accionado por el tránsito, y su conservación es más sencilla.
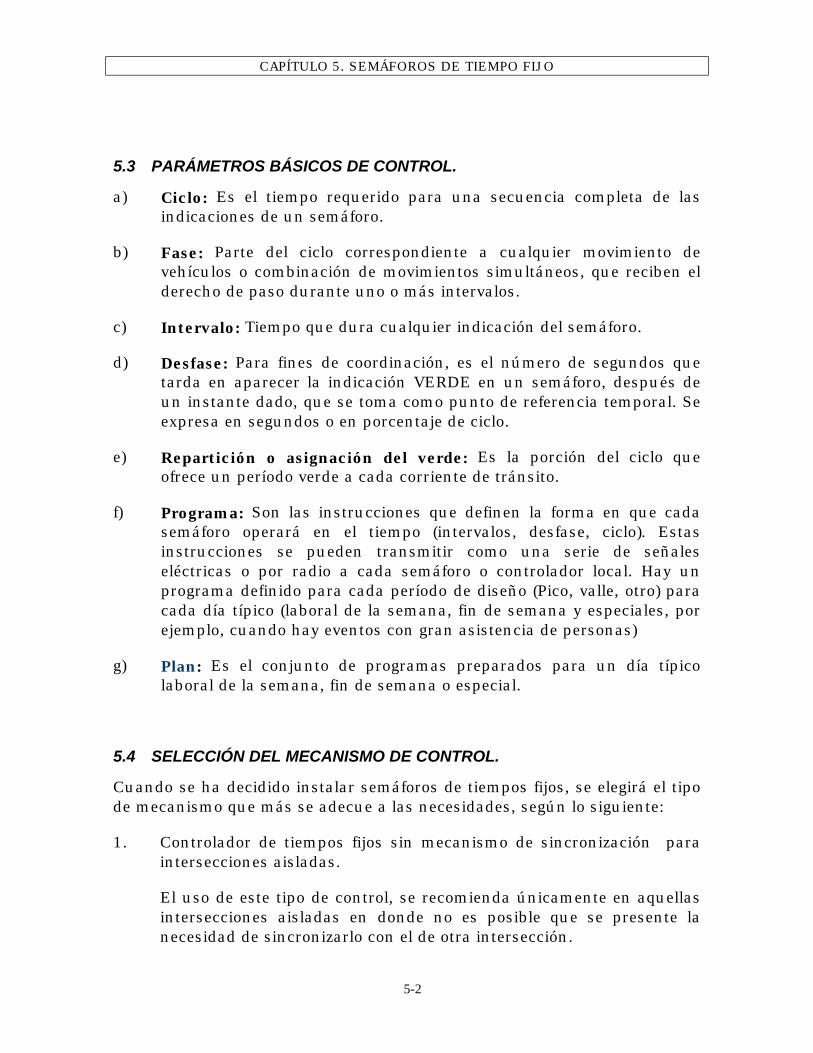
CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-2
5.3 PARÁMETROS BÁSICOS DE CONTROL.
a) Ciclo: Es el tiempo requerido para una secuencia completa de las indicaciones de un semáforo.
b) Fase: Parte del ciclo correspondiente a cualquier movimiento de vehículos o combinación de movimientos simultáneos, que reciben el derecho de paso durante uno o más intervalos.
c) Intervalo: Tiempo que dura cualquier indicación del semáforo.
d) Desfase: Para fines de coordinación, es el número de segundos que tarda en aparecer la indicación VERDE en un semáforo, después de un instante dado, que se toma como punto de referencia temporal. Se expresa en segundos o en porcentaje de ciclo.
e) Repartición o asignación del verde: Es la porción del ciclo que ofrece un período verde a cada corriente de tránsito.
f) Programa: Son las instrucciones que definen la forma en que cada semáforo operará en el tiempo (intervalos, desfase, ciclo). Estas instrucciones se pueden transmitir como una serie de señales eléctricas o por radio a cada semáforo o controlador local. Hay un programa definido para cada período de diseño (Pico, valle, otro) para cada día típico (laboral de la semana, fin de semana y especiales, por ejemplo, cuando hay eventos con gran asistencia de personas)
g) Plan: Es el conjunto de programas preparados para un día típico laboral de la semana, fin de semana o especial.
5.4 SELECCIÓN DEL MECANISMO DE CONTROL.
Cuando se ha decidido instalar semáforos de tiempos fijos, se elegirá el tipo de mecanismo que más se adecue a las necesidades, según lo siguiente:
1. Controlador de tiempos fijos sin mecanismo de sincronización para intersecciones aisladas.
El uso de este tipo de control, se recomienda únicamente en aquellas intersecciones aisladas en donde no es posible que se presente la necesidad de sincronizarlo con el de otra intersección.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-3
2. Controlador de tiempos fijos con mecanismo de sincronización, para intersecciones aisladas.
Este tipo de control tiene un dispositivo o función de sincronización, para intersecciones aisladas, cuando:
a) En el futuro, se necesite la coordinación del semáforo con otros, o el semáforo sea supervisado por un control maestro.
b) Sean aceptables las duraciones fijas de ciclos y de intervalos, todo el tiempo que dure la operación de control de tránsito.
En algunos casos, se puede emplear un control de varias opciones de especificar planes, para permitir programas de tiempo y dar flexibilidad al control para adaptarse a las variaciones de los patrones de tránsito durante el día. La elección de programas, puede efectuarse mediante el empleo de dispositivos especiales.
3. Control que permite coordinación para intersecciones sucesivas o una red.
En general, los semáforos de tiempos fijos deben coordinarse si se encuentran a distancias menores de 400 metros, y aún a distancias mayores su coordinación puede resultar conveniente.
En la operación aislada de semáforos de tiempos fijos, en intersecciones adyacentes, pueden resultar graves demoras e inconvenientes gran parte de las cuales se puede evitar por medio de una coordinación bien planeada. Sin embargo, en ciertas condiciones adversas que pudieran afectar la eficacia de la coordinación, se pueden obtener mejores resultados por medio de semáforos accionados por el tránsito vehicular, ya sea independientemente o en forma coordinada.
5.5 FUNDAMENTOS TEÓRICOS
Para comprender adecuadamente la operación del tránsito discontinuo propio en intersecciones reguladas con semáforos y también unificar conceptos y definiciones, se presenta a continuación algunos fundamentos teóricos.
5.5.1 Intervalo vehicular. De acuerdo a la Figura 8 se tiene que el intervalo vehicular es el tiempo que media entre parachoques traseros de dos vehículos consecutivos en una corriente. El intervalo es la suma del paso y la brecha, el primero es el tiempo necesario para que un vehículo recorra

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-4
su propia longitud y la segunda es el tiempo que hay entre el parachoques trasero del vehículo delantero y el parachoques delantero del que lo sigue.
5.5.2 Intervalo de descarga. Si se tiene una fila de vehículos en un acceso a una intersección semaforizada detenidos por la indicación roja del semáforo como se ilustra en la Figura 27 y aparece el verde, el primer vehículo toma un tiempo para arrancar y acelerar hasta la velocidad de operación que se mide como el que tarda en pasar su parachoques trasero por una línea tomada como referencia obteniéndose el intervalo de descarga que es igual a h+t1, el segundo vehículo ya ha tenido oportunidad de arrancar y alcanzar mayor velocidad que el primero al pasar por la línea de referencia en la cual se mide su intervalo de descarga cuando pase el parachoques trasero por ella el cual será h+t2, menor que el anterior y así sucesivamente con los siguientes vehículos hasta que este intervalo de descarga se vuelve constante y representa el menor intervalo de descarga posible bajo las condiciones particulares del lugar, este intervalo se denomina intervalo de saturación, se representa por la letra h y se da en segundos.
En las Figuras 27 y 28 se representan los intervalos de descarga correspondientes a los vehículos en la cola, se puede observar como decrece su valor cuando aumenta el orden de la posición del vehículo en la cola.
FIGURA 27. Condiciones en tránsito interrumpido

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-5
FIGURA 28. Tasa de flujo de saturación y tiempo perdido FUENTE: Mencionado por: RADELAT E., G. Curso sobre capacidad vial. Facultad de Minas, Universidad Nacional de Colombia – Sede Medellín, Unidad de vías y transporte, apuntes del curso, 16 al 20 de diciembre, 1991.
Los valores ti, que son los tiempos que supera el valor del intervalo de descarga al de saturación h en los primeros vehículos, al ser sumados resulta el tiempo perdido total en el arranque del verde como se indica a continuación:
λ ==∑ tii
N
1
Donde:
λ= Tiempo perdido total en el arranque del verde [s]
ti = Tiempo perdido en el arranque del vehículo i [s]
N = Último vehículo en cola con intervalo de descarga mayor que el de saturación.
El comportamiento de la tasa de descarga ha sido estudiado por varios autores y sus resultados se han dibujado en la Figura 29.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-6
FIGURA 29. Comparación de varios resultados de investigación de los intervalos de descarga de una cola.
FUENTE: Mencionado por: RADELAT E., G. Curso sobre capacidad vial. Facultad de Minas, Universidad Nacional de Colombia – Sede Medellín, Unidad de vías y transporte, apuntes del curso, 16 al 20 de diciembre, 1991.
En la ciudad de Medellín (MARTÍNEZ, 1999) se ha hecho un estudio de este intervalo de descarga en carriles de intersecciones controladas con semáforos accionados por el tránsito considerando los primeros 10 vehículos de la cola en condiciones geométricas diferentes de pendiente, ancho de carril, tipo de maniobra y ubicación del carril en la calzada. De estos resultados se ilustra lo que corresponde al acceso occidental del cruce entre la Transversal Inferior con la calle 1 sur que tiene una pendiente ascendente del 15,2%, 3% de vehículos pesados y carril de 3,5 metros y del acceso Norte de la intersección de la Transversal Inferior con la calle 16A sur con pendiente del 4,4%, 10,4% de vehículos pesados, carril de 4,2 m. Ver Figuras 30 y 31. Las líneas externas representan los límites del intervalo de valores separados del promedio en una desviación estándar, consecuentemente la línea interna corresponde al promedio de los valores. Según estos resultados se tienen para dichas condiciones intervalos de saturación de 2,48 s/veh y 2,06 s/veh respectivamente, que son valores razonables para dichas condiciones y similares a los representados en la Figura 29. Otros resultados de dicho estudios se presentan en la Tabla 6.
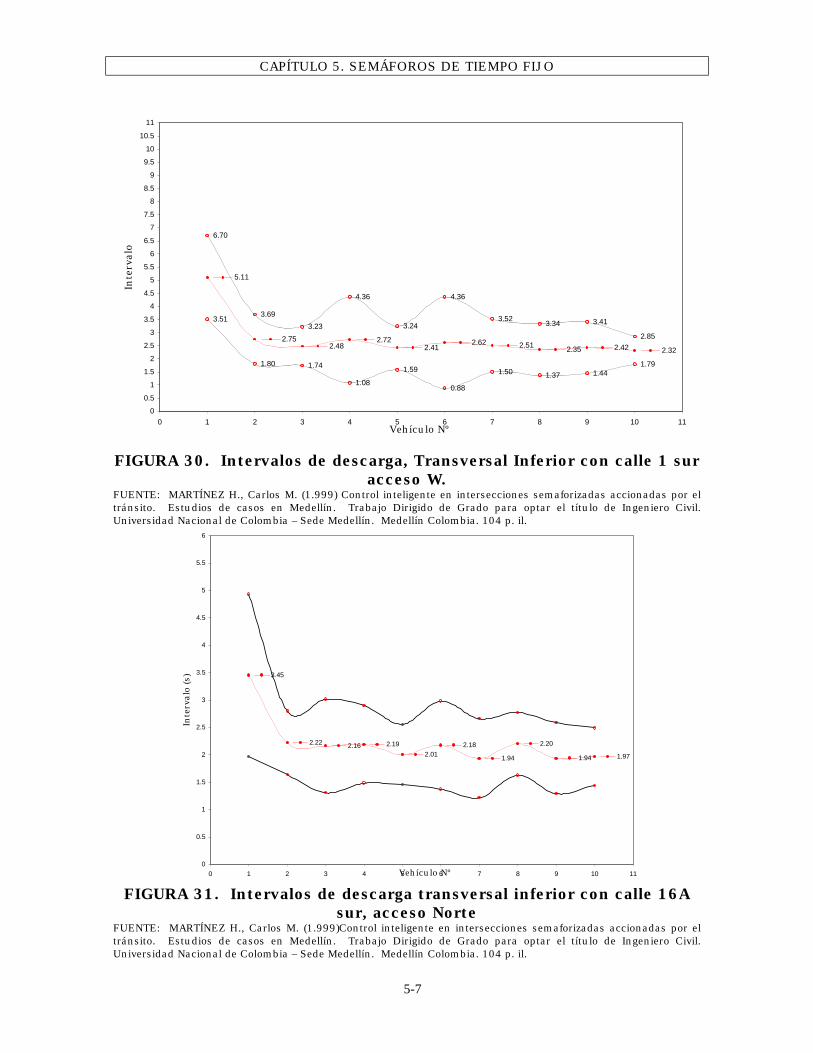
CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-7
5.11
2.752.48
2.722.41
2.62 2.51 2.35 2.42 2.32
3.51
1.80 1.74
1.08
1.59
0.88
1.50 1.37 1.441.79
6.70
3.693.23
4.36
3.24
4.36
3.52 3.34 3.41
2.85
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
8
8.5
9
9.5
10
10.5
11
0 1 2 3 4 5 6 7 8 9 10 11Vehículo Nº
Inte
rval
o
FIGURA 30. Intervalos de descarga, Transversal Inferior con calle 1 sur
acceso W. FUENTE: MARTÍNEZ H., Carlos M. (1.999) Control inteligente en intersecciones semaforizadas accionadas por el tránsito. Estudios de casos en Medellín. Trabajo Dirigido de Grado para optar el título de Ingeniero Civil. Universidad Nacional de Colombia – Sede Medellín. Medellín Colombia. 104 p. il.
3.45
2.22 2.16 2.192.01
2.18
1.94
2.20
1.94 1.97
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
0 1 2 3 4 5 6 7 8 9 10 11Vehículo Nº
Inte
rval
o (s
)
FIGURA 31. Intervalos de descarga transversal inferior con calle 16A
sur, acceso Norte FUENTE: MARTÍNEZ H., Carlos M. (1.999)Control inteligente en intersecciones semaforizadas accionadas por el tránsito. Estudios de casos en Medellín. Trabajo Dirigido de Grado para optar el título de Ingeniero Civil. Universidad Nacional de Colombia – Sede Medellín. Medellín Colombia. 104 p. il.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-8
5.5.3 Flujo de saturación. Al inverso del intervalo de saturación se le denomina tasa de descarga a saturación o flujo de saturación y se expresa en vehículos mixtos o equivalentes por hora de verde por carril.
Si se consideran los valores encontrados por Greenshields como aparece en la Tabla 5 se puede calcular el flujo de saturación por carril, así:
hveh
vehseg
hseg
saturaciondeIntervaloh
segsaturaciondeFlujo 1714
1,2
36003600===
En la Tabla 6 se muestran los resultados del estudio de Martínez (1999) en la cual aparece para 8 carriles la tasa de descarga de los primeros diez vehículos en cola de intersecciones semaforizadas accionadas por el tránsito. Como es natural los intervalos de descarga disminuyen desde el primer vehículo hasta el último y puede decirse que a partir del cuarto vehículo se estabiliza, por lo tanto, se ha calculado el intervalo de descarga a saturación a partir de este vehículo y consecuentemente el flujo de saturación. Al respecto puede concluirse cierta relación inversa entre el flujo de saturación y la pendiente longitudinal de la vía que debería ser complementada con el análisis de los demás aspectos como la composición vehicular, anchura de carril y tipo de maniobra ejecutada. TABLA 5. Intervalos de entrada a una intersección semaforizada Vehículos en cola Intervalo de entrada Greenshields
1 h+t1 3,8s 2 h+t2 3,1s 3 h+t3 2,7s . . . . . . N h+tN 2,2s
N+1 H 2,1s N+2 H 2,1s
. . .
. . . N H 2,1s
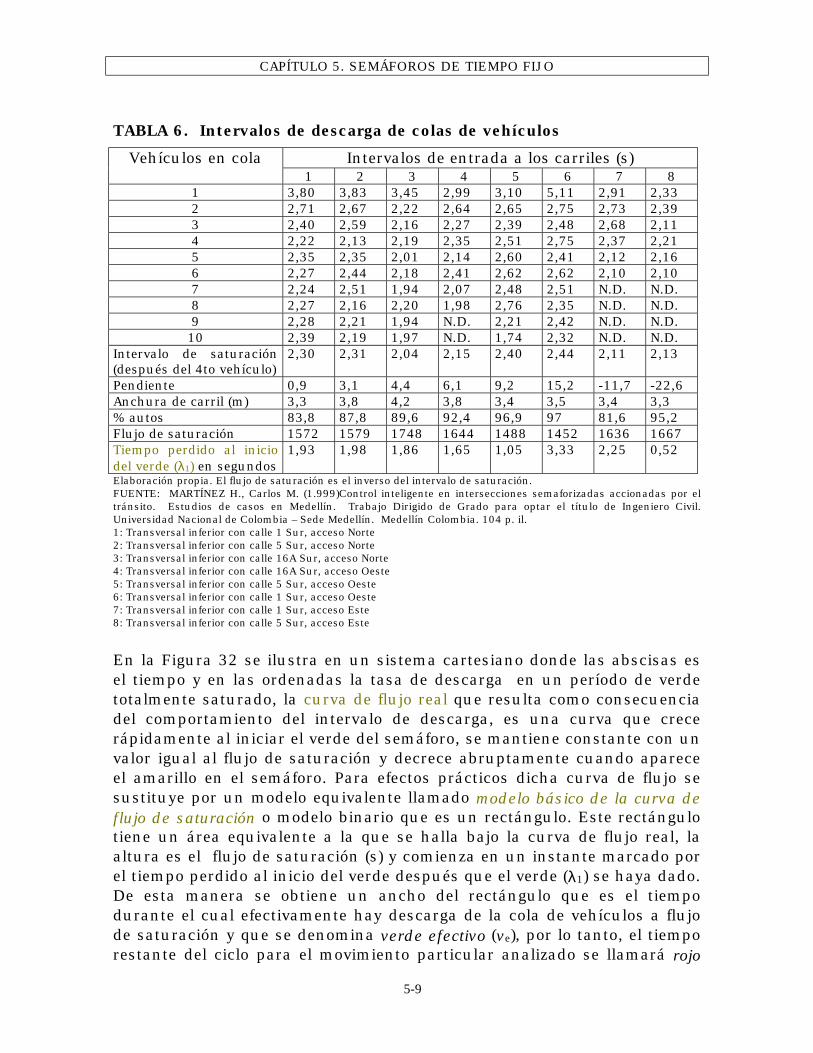
CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-9
TABLA 6. Intervalos de descarga de colas de vehículos Intervalos de entrada a los carriles (s) Vehículos en cola
1 2 3 4 5 6 7 8 1 3,80 3,83 3,45 2,99 3,10 5,11 2,91 2,33 2 2,71 2,67 2,22 2,64 2,65 2,75 2,73 2,39 3 2,40 2,59 2,16 2,27 2,39 2,48 2,68 2,11 4 2,22 2,13 2,19 2,35 2,51 2,75 2,37 2,21 5 2,35 2,35 2,01 2,14 2,60 2,41 2,12 2,16 6 2,27 2,44 2,18 2,41 2,62 2,62 2,10 2,10 7 2,24 2,51 1,94 2,07 2,48 2,51 N.D. N.D. 8 2,27 2,16 2,20 1,98 2,76 2,35 N.D. N.D. 9 2,28 2,21 1,94 N.D. 2,21 2,42 N.D. N.D. 10 2,39 2,19 1,97 N.D. 1,74 2,32 N.D. N.D.
Intervalo de saturación (después del 4to vehículo)
2,30 2,31 2,04 2,15 2,40 2,44 2,11 2,13
Pendiente 0,9 3,1 4,4 6,1 9,2 15,2 -11,7 -22,6 Anchura de carril (m) 3,3 3,8 4,2 3,8 3,4 3,5 3,4 3,3 % autos 83,8 87,8 89,6 92,4 96,9 97 81,6 95,2 Flujo de saturación 1572 1579 1748 1644 1488 1452 1636 1667 Tiempo perdido al inicio del verde ( λ1) en segundos
1,93 1,98 1,86 1,65 1,05 3,33 2,25 0,52
Elaboración propia. El flujo de saturación es el inverso del intervalo de saturación. FUENTE: MARTÍNEZ H., Carlos M. (1.999)Control inteligente en intersecciones semaforizadas accionadas por el tránsito. Estudios de casos en Medellín. Trabajo Dirigido de Grado para optar el título de Ingeniero Civil. Universidad Nacional de Colombia – Sede Medellín. Medellín Colombia. 104 p. il. 1: Transversal inferior con calle 1 Sur, acceso Norte 2: Transversal inferior con calle 5 Sur, acceso Norte 3: Transversal inferior con calle 16A Sur, acceso Norte 4: Transversal inferior con calle 16A Sur, acceso Oeste 5: Transversal inferior con calle 5 Sur, acceso Oeste 6: Transversal inferior con calle 1 Sur, acceso Oeste 7: Transversal inferior con calle 1 Sur, acceso Este 8: Transversal inferior con calle 5 Sur, acceso Este
En la Figura 32 se ilustra en un sistema cartesiano donde las abscisas es el tiempo y en las ordenadas la tasa de descarga en un período de verde totalmente saturado, la curva de flujo real que resulta como consecuencia del comportamiento del intervalo de descarga, es una curva que crece rápidamente al iniciar el verde del semáforo, se mantiene constante con un valor igual al flujo de saturación y decrece abruptamente cuando aparece el amarillo en el semáforo. Para efectos prácticos dicha curva de flujo se sustituye por un modelo equivalente llamado modelo básico de la curva de flujo de saturación o modelo binario que es un rectángulo. Este rectángulo tiene un área equivalente a la que se halla bajo la curva de flujo real, la altura es el flujo de saturación (s) y comienza en un instante marcado por el tiempo perdido al inicio del verde después que el verde (λ1) se haya dado. De esta manera se obtiene un ancho del rectángulo que es el tiempo durante el cual efectivamente hay descarga de la cola de vehículos a flujo de saturación y que se denomina verde efectivo (ve), por lo tanto, el tiempo restante del ciclo para el movimiento particular analizado se llamará rojo

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-10
efectivo (re)pues en ese tiempo no hay circulación vehicular. Por lo tanto, el verde efectivo (ve) inicia un lapso después de iniciado el verde del semáforo al cual se le denomina tiempo perdido al inicio o tiempo perdido en el arranque del verde (λ1) y finaliza un momento después de terminado el verde del semáforo y se llama tiempo ganado al final del verde o tiempo ganado en el amarillo (λ2).
FIGURA 32. Modelo básico del flujo de saturación y definiciones
En la parte inferior de la Figura 32 se muestran los intervalos de rojo, verde y amarillo de los movimientos conflictivos en los que se define el inicio y terminación de la fase que se representa a mayor escala en la Figura 11; en esta figura se indican otros términos como el Entreverde (I) comprendido entre el final y el inicio de verdes del semáforo de dos movimientos en fases consecutivas y el tiempo perdido en la fase ( ? φ) que es el tiempo durante la fase en el cual no se experimenta la circulación vehicular, de dicha figura se deducen algunas igualdades:
V = ve + λ1 - λ2
?= I + λ1 - λ2

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-11
I = ? - λ1 + λ2
V + I = ve + ? ⇒ V = ve + ? - I
( ) ( ) CIVm
e
m
=+=+ ∑∑== 11 φ
φφ
φ ?v
Se puede observar esto en la Figura 6.
Donde:
V = verde del semáforo [s]
ve = verde efectivo [s]
λ1 = tiempo perdido en el arranque del verde [s]
λ2 = tiempo ganado en el amarillo [s] o prolongación del verde efectivo
?φ = tiempo perdido en la fase φ [s]
I = entreverde [s]
φ = fase del semáforo
m = número de fases en el ciclo
c =duración del ciclo [s]
5.5.3.1 Medición del flujo de saturación
Se presentarán dos métodos, el de Branston y Van Zuylen – Gibson y el de TRANSYT- 7F.
a) Método de Branston y Van Zuylen modificado por Gibson. Para obtener un estimador del flujo de saturación básico ( bS ), tiempo perdido en el arranque (λ1) y tiempo ganado en el amarillo (λ2) se presenta un procedimiento con mediciones en el campo que se basa en BRANSTON y VAN ZUYLEN, 1978, modificado por GIBSON, 1988 llenando el formato de la Figura 33.
El formato tiene un encabezamiento en el que se registra la información general del sitio de observación como son: ciudad donde se realiza el estudio, nombre del anotador en el formato, el número de páginas consecutivas y respecto al total (Hoja__de__), el nombre de la intersección, el
CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-12
período del día (pico de la mañana, valle de la tarde, etc.), el acceso de la intersección (Norte, sur, etc.) y del carril particular (enumerar en orden ascendente desde el separador central a la izquierda hasta el anden a la derecha como 1, 2, 3,... etc.), la programación del semáforo (anotar las duraciones de verde, amarillo y rojo de la fase en cuestión), la fecha, día y hora del estudio, las condiciones climáticas que se presentaron durante el trabajo de campo y por último las observaciones que se estime necesarias para aclarar cualquier duda como la ocurrencia de accidentes, intervención de agentes de tránsito, realización de obras, manifestaciones públicas, etc.
A continuación del encabezamiento aparece una tabla compuesta por cinco columnas principales algunas de ellas están subdivididas:
CICLO N°: Corresponde al número de orden del ciclo observado; para que sea estadísticamente confiable se recomienda que se observen por lo menos treinta ciclos completos con datos en los tres períodos.
II PERIODO: La tercera columna está dividida en 10 y cada una de ellas en dos renglones lo que da un total de 20 casillas dispuestas para anotar el tipo de vehículo y maniobra que realizan los vehículos quinto hasta el último que pasó por la línea de referencia durante el verde y que estuvo en cola (No aquellos que se unieron a la cola mientras se descargaba y se movían).
III PERIODO: La cuarta columna está compuesta por cuatro sub-columnas provistas para registrar en ellas el tipo de vehículo y maniobra que realizan los vehículos que pasan por la línea de referencia desde el inicio del amarillo hasta el último que estuvo haciendo parte de la cola. Puede darse el caso que pasen en parte de la indicación roja del semáforo.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-13
CIUDAD__________________ANOTADOR_______________________________HOJA_____DE____ INTERSECCIÓN___________________________________ PERIODO DEL DIA_________________ ACCESO______CARRIL N°______ARCO N°____PROGRAMACIÓN DEL SEMÁFORO_________ FECHA__________DIA________HORA_______CONDICIONES CLIMÁTICAS_________________ OBSERVACIONES_____________________________________________________________________ _______________________________________________________________________________________
Vehículos salidos de la cola, según tipo y movimiento. Ciclo
N° I período II período III período Tiempo del 1ER período
Tiempo de saturación
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Total
FIGURA 33. Hoja de campo – Flujo de saturación.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-14
TIEMPO DEL 1ER PERIODO (t1): Es el tiempo que media entre el inicio del verde del semáforo para el movimiento en observación y el paso del parachoques trasero del cuarto vehículo por la línea de referencia.
TIEMPO DE SATURACIÓN (ts): Es el tiempo que transcurre desde el inicio del verde hasta el paso del parachoques trasero del último vehículo que estuvo en cola por la línea de referencia.
En resumen, en cada ciclo se registra para cada período: el tipo de vehículo, maniobra realizada, t1 y ts. Es necesario la participación de dos observadores para tomar la información en el formato, el primero se encarga de registrar el tipo de vehículo y maniobra que realiza el vehículo en cada uno de los tres períodos; su compañero con el cronómetro en mano registra t1 y ts y le indica el inicio del segundo y tercer período.
Una vez terminada la labor de campo y registrada la información en el formato como se ha indicado se procede a realizar los cálculos del flujo de saturación característico del movimiento registrado, el tiempo perdido en el arranque del verde y el ganado en el amarillo.
Con base en las mediciones de campo las duraciones de los tres períodos se definen así:
Primer período (t1): Como se indicó al principio.
Segundo período (t2): Desde el final del primer período hasta el instante en que pasa el parachoques trasero del ultimo vehículo que estuvo en cola por la línea de referencia o cuando el semáforo cambia su indicación de verde a amarilla (Lo que ocurra primero).
Tercer período (t3): Desde el inicio del amarillo hasta el instante en que el parachoques trasero del último vehículo que estuvo en cola pase por la línea de referencia (Aún si lo hace en rojo). No habrá tercer período, si la cola se descarga antes de aparecer el amarillo. Si j es el número de ciclos, se tiene:
>−
≤=
vtsivtvtsi
tsjsj
sjj ,
,03
y
>>−
≤≤=−=
vtdecirestsitvvttdecirestsitt
tsjjj
sjjjjsjj ,,,
,,,0
0
31
1312

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-15
El estimador del flujo de saturación ( bS ) [ADE/s] es:
[ ]
( )∑
∑∑
=
= =
−
+=
2
2
11
1 132
N
jjsj
N
j
m
iijiji
b
tt
nnfS
Consiste en dividir el número de vehículos que se descargaron a tasa de saturación convertidos a Automóviles Directos Equivalentes (ADE) entre el tiempo que gastaron en descargarse, es decir, el promedio de la tasa de descarga a saturación. Aunque la expresión incluye en la sumatoria a N2, el hecho de también considerar a n3ijj hace necesario considerar aquellos ciclos con datos en el tercer período. Se debe multiplicar el resultado por 3600 para obtener ADE/hora de verde.
Donde :
j = 1,2, .... N2 = ciclos observados con datos en el segundo período.
N2 = Número de ciclos que tienen datos del II período.
i = 1,2,..... m = tipos de vehículo.
fi = Factor de equivalencia por tipo de vehículo (no por maniobra, ni pendiente, etc.) [ADE/veh ó veh lig/veh].
n2ij = Número de vehículos tipo i en el 2º período del ciclo j.
n3ij = Número de vehículos tipo i en el 3º período del ciclo j.
tsj = tiempo de saturación (desde inicio del verde hasta último vehículo en cola) en el ciclo j [segundos].
t1j = duración del 1er período para el ciclo j [segundos].
Estimador del tiempo perdido al inicio o en el arranque del verde ( λ 1 ) [segundos]:
S * N
] n * f [
N
t=
b1
1iji
m
1=i
N
1=j
1
1j
N
1=j1
11
-ˆ
ˆ∑∑∑
λ

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-16
Donde :
λ 1 = Es el tiempo promedio adicional que gastan los cuatro primeros vehículos en descargarse de la cola con respecto al tiempo que utilizarían si se descargasen, convertidos en ADE, a tasa de saturación o de flujo de saturación básico.
j = 1,2,... N1 = ciclos observados con datos en el primer período.
N1 = Número de ciclos que tienen datos del 1er período.
n1ij = Número de vehículos tipo i en el 1er período del ciclo j
Estimador del tiempo ganado al final del verde o en el amarillo ó extensión del verde efectivo. ( λ 2 ) [segundos]:
N
t=
3
3j
N
1=j2
3
∑λ
Donde:
λ 2 = es el tiempo promedio del tercer período, o sea, el tiempo promedio que consumen en descargarse los últimos vehículos después de terminar el verde del semáforo (en amarillo y rojo).
j = 1,2,....N3 = ciclos observados con datos en el tercer período.
N3 = Número de ciclos que tienen datos del 3er período.
t3j = duración del 3er período para el ciclo j [segundos].
b) Método de TRANSYT-7F. De acuerdo al estudio de GOMEZ Y OTROS, 1988, en el Manual del programa computacional TRANSYT-7F se proponen procedimientos separados para obtener a partir de observaciones en el campo valores estimados del flujo de saturación (S) y del tiempo perdido en el verde (L) y ganado en el amarillo o extensión del verde efectivo (E) que aplicaron en Medellín y que se describe a continuación:
Flujo de saturación. (S). Este estudio de campo considera la Figura 34. En la columna de Tiempos requeridos, se registra la cantidad de segundos que necesitan del tercer vehículo hasta el último en cola (si ésta varía entre 4 y 12 vehículos) para que pasen por la línea de referencia sus parachoques trasero. Cada observación se separa de la siguiente para no confundirlas.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-17
En la columna Nº de observaciones se totaliza, para cada longitud de cola, el número de observaciones de tiempos requeridos registrados en la columna precedente.
TRANSYT-7F
FORMATO PARA LA TOMA DE DATOS Y ANALISIS DE FLUJO DE SATURACIÓN
CIUDAD________________PERIODO DE ESTUDIO____________ HORA_________ INTERSECCIÓN_____________________________ ACCESO_______ CARRIL______ OBSERVADOR____________________ HORA_________ CLIMA__________________
Intervalos y flujos de saturación (Vehículo 3 a vehículo A) Total de
vehículos en cola
Tiempos requeridos (Entre el 3er y el último vehículo)
Nº de observaciones
Tiempo total
Producto
A A-3 T B C=ΣT D=(A-3)*B 4 5 6 7 8 9 10 11 12
Totales E= F= G= Intervalo: H=F/G= Flujo de saturación: S=3600/H=
FIGURA 34. Formato para la toma de datos y análisis de flujo de saturación con el TRANSYT-7F.
FUENTE: Manual del usuario del programa TRANSYT-7F. Mencionado en: GOMEZ, Dorian, VALENCIA A., Víctor G. y VILLÁN R., Fernando. (1988) Aplicación del programa TRANSYT-7F para la optimización de semáforos en Colombia. Tesis de maestría. Universidad del Cauca. Instituto de posgrado en vías e ingeniería civil. Popayán. Colombia.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-18
Tiempo total, es la sumatoria de los tiempos requeridos en cada longitud de cola.
Producto, D= Columna (A-3) por columna B.
Totales:
E= Sumatoria del número de observaciones consignadas en el formato.
F= Sumatoria del tiempo total.
G= sumatoria del producto, es decir, el número de vehículos observados.
Intervalo de saturación promedio del movimiento. H= F/G en segundos por vehículo.
Flujo de saturación: S= 3600/H en vehículos mixtos por hora de verde.
Tiempo perdido en el arranque del verde (L). Este estudio se realiza diligenciando el formato que aparece en la Figura 35.
El registro de los datos en las columnas se describe a continuación:
Observaciones (B): Se indica en esta columna con marcas los tiempos gastados en pasar el parachoques trasero del primer vehículo por la línea de referencia según los tiempos predefinidos en la columna anterior (A).
N° de observaciones (C): Total de marcas de la columna anterior para cada tiempo predefinido.
A*C (D): Producto de los valores de cada renglón de las columnas TIEMPO EN SEGUNDOS por Nº DE OBSERVACIONES.
Totales: N= Sumatoria del Nº DE OBSERVACIONES.
T= Sumatoria de la columna A*C.
Tiempo perdido en el arranque: L= T/N en segundos.
Extensión del verde efectivo (E). En el mismo formato anterior y en el segundo conjunto de tres columnas se registra para cada movimiento y carril la información considerando el último vehículo en cola en forma similar que para el tiempo perdido en el arranque.
c) Resultados de estudios de flujos de saturación en Medellín. En la Tabla 7 se presentan los resultados correspondientes a intersecciones de la ciudad de Medellín obtenidos por GÓMEZ, VALENCIA y VILLÁN, 1988.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-19
TRANSYT-7F
HOJA DE DATOS Y ANALISIS PARA TIEMPO PERDIDO EN EL ARRANQUE Y EXTENSIÓN DEL VERDE EFECTIVO.
CIUDAD_______________UBICACIÓN_______________________________________ ARCO______________FECHA___________________ HORA_____________________ OBSERVADOR_______________________CONDICIONES_____________________ Tiempo en segundos
Tiempo perdido en el arranque (Primer vehículo)
Extensión del verde efectivo (Ultimo vehículo)
Observaciones Nº de observaciones
A*C Observaciones Nº de observaciones
A*C
A B C D B C D <1,0
1,2 1,4 1,6 1,8 2,0 2,2 2,4 2,6 2,8 3,0 3,2 3,4 3,6 3,8 4,0 4,2 4,4 4,6 4,8 5,0
>5,0 TOTALES N= T= N= T= TIEMPO PERDIDO EN EL ARRANQUE (L): L=T/N=
EXTENSIÓN MEDIA DEL VERDE EFECTIVO (E): E=T/N=
FIGURA 35. Hoja de datos y de análisis para tiempo perdido en el arranque y extensión del verde efectivo.
FUENTE: Manual del usuario del programa TRANSYT-7F. Mencionado en: GOMEZ, Dorian, VALENCIA A., Víctor G. y VILLÁN R., Fernando. (1988) Aplicación del programa TRANSYT-7F para la optimización de semáforos en Colombia. Tesis de maestría. Universidad del Cauca. Instituto de posgrado en vías e ingeniería civil. Popayán. Colombia.
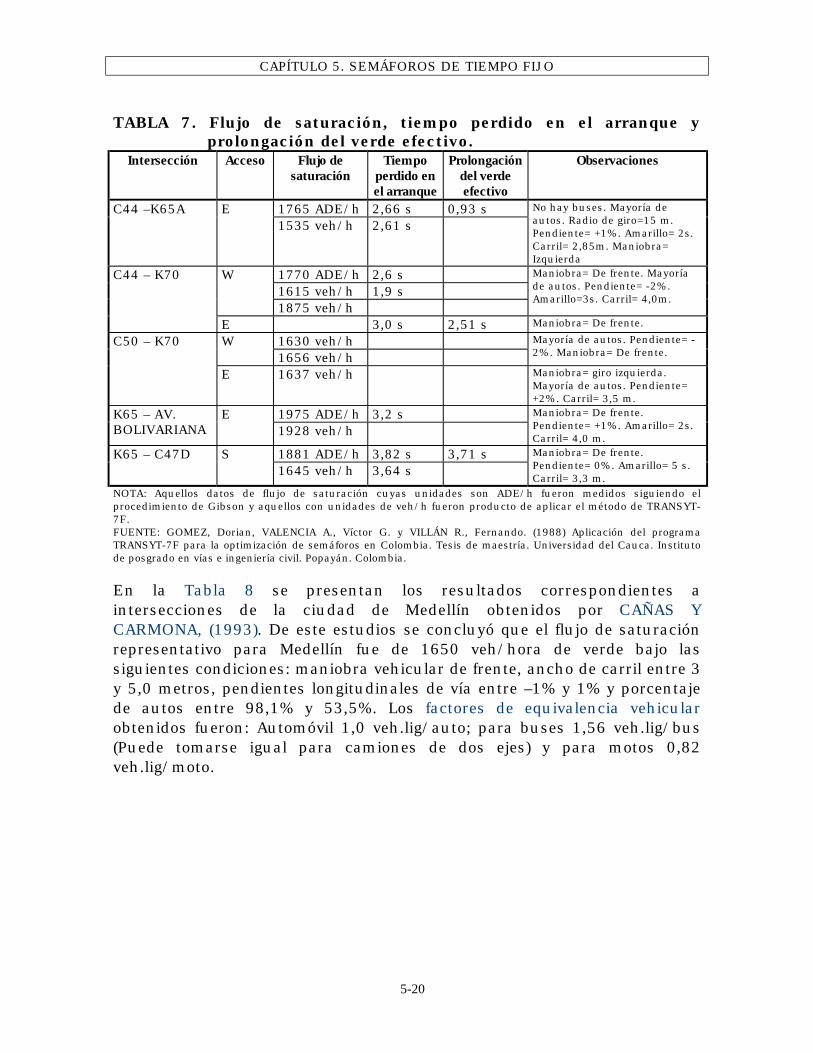
CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-20
TABLA 7. Flujo de saturación, tiempo perdido en el arranque y prolongación del verde efectivo.
Intersección Acceso Flujo de saturación
Tiempo perdido en el arranque
Prolongación del verde efectivo
Observaciones
1765 ADE/h 2,66 s 0,93 s C44 –K65A E 1535 veh/h 2,61 s
No hay buses. Mayoría de autos. Radio de giro=15 m. Pendiente= +1%. Amarillo= 2s. Carril= 2,85m. Maniobra= Izquierda
1770 ADE/h 2,6 s 1615 veh/h 1,9 s
W
1875 veh/h
Maniobra= De frente. Mayoría de autos. Pendiente= -2%. Amarillo=3s. Carril= 4,0m.
C44 – K70
E 3,0 s 2,51 s Maniobra= De frente.
1630 veh/h W 1656 veh/h
Mayoría de autos. Pendiente= -2%. Maniobra= De frente.
C50 – K70
E 1637 veh/h Maniobra= giro izquierda. Mayoría de autos. Pendiente= +2%. Carril= 3,5 m.
1975 ADE/h 3,2 s K65 – AV. BOLIVARIANA
E 1928 veh/h
Maniobra= De frente. Pendiente= +1%. Amarillo= 2s. Carril= 4,0 m.
1881 ADE/h 3,82 s 3,71 s K65 – C47D S 1645 veh/h 3,64 s
Maniobra= De frente. Pendiente= 0%. Amarillo= 5 s. Carril= 3,3 m.
NOTA: Aquellos datos de flujo de saturación cuyas unidades son ADE/h fueron medidos siguiendo el procedimiento de Gibson y aquellos con unidades de veh/h fueron producto de aplicar el método de TRANSYT-7F. FUENTE: GOMEZ, Dorian, VALENCIA A., Víctor G. y VILLÁN R., Fernando. (1988) Aplicación del programa TRANSYT-7F para la optimización de semáforos en Colombia. Tesis de maestría. Universidad del Cauca. Instituto de posgrado en vías e ingeniería civil. Popayán. Colombia.
En la Tabla 8 se presentan los resultados correspondientes a intersecciones de la ciudad de Medellín obtenidos por CAÑAS Y CARMONA, (1993). De este estudios se concluyó que el flujo de saturación representativo para Medellín fue de 1650 veh/hora de verde bajo las siguientes condiciones: maniobra vehicular de frente, ancho de carril entre 3 y 5,0 metros, pendientes longitudinales de vía entre –1% y 1% y porcentaje de autos entre 98,1% y 53,5%. Los factores de equivalencia vehicular obtenidos fueron: Automóvil 1,0 veh.lig/auto; para buses 1,56 veh.lig/bus (Puede tomarse igual para camiones de dos ejes) y para motos 0,82 veh.lig/moto.
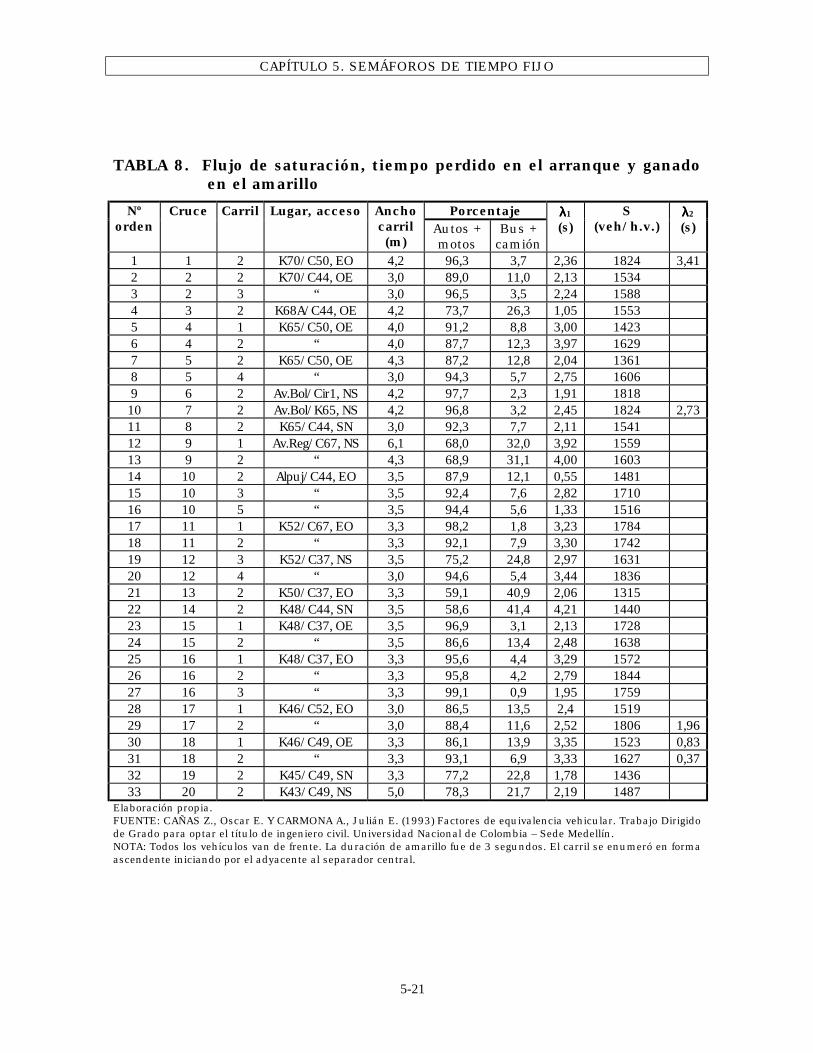
CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-21
TABLA 8. Flujo de saturación, tiempo perdido en el arranque y ganado en el amarillo
Porcentaje Nº orden
Cruce Carril Lugar, acceso Ancho carril (m)
Autos + motos
Bus + camión
λλλλ1 (s)
S (veh/h.v.)
λλλλ2 (s)
1 1 2 K70/C50, EO 4,2 96,3 3,7 2,36 1824 3,41 2 2 2 K70/C44, OE 3,0 89,0 11,0 2,13 1534 3 2 3 “ 3,0 96,5 3,5 2,24 1588 4 3 2 K68A/C44, OE 4,2 73,7 26,3 1,05 1553 5 4 1 K65/C50, OE 4,0 91,2 8,8 3,00 1423 6 4 2 “ 4,0 87,7 12,3 3,97 1629 7 5 2 K65/C50, OE 4,3 87,2 12,8 2,04 1361 8 5 4 “ 3,0 94,3 5,7 2,75 1606 9 6 2 Av.Bol/Cir1, NS 4,2 97,7 2,3 1,91 1818 10 7 2 Av.Bol/K65, NS 4,2 96,8 3,2 2,45 1824 2,73 11 8 2 K65/C44, SN 3,0 92,3 7,7 2,11 1541 12 9 1 Av.Reg/C67, NS 6,1 68,0 32,0 3,92 1559 13 9 2 “ 4,3 68,9 31,1 4,00 1603 14 10 2 Alpuj/C44, EO 3,5 87,9 12,1 0,55 1481 15 10 3 “ 3,5 92,4 7,6 2,82 1710 16 10 5 “ 3,5 94,4 5,6 1,33 1516 17 11 1 K52/C67, EO 3,3 98,2 1,8 3,23 1784 18 11 2 “ 3,3 92,1 7,9 3,30 1742 19 12 3 K52/C37, NS 3,5 75,2 24,8 2,97 1631 20 12 4 “ 3,0 94,6 5,4 3,44 1836 21 13 2 K50/C37, EO 3,3 59,1 40,9 2,06 1315 22 14 2 K48/C44, SN 3,5 58,6 41,4 4,21 1440 23 15 1 K48/C37, OE 3,5 96,9 3,1 2,13 1728 24 15 2 “ 3,5 86,6 13,4 2,48 1638 25 16 1 K48/C37, EO 3,3 95,6 4,4 3,29 1572 26 16 2 “ 3,3 95,8 4,2 2,79 1844 27 16 3 “ 3,3 99,1 0,9 1,95 1759 28 17 1 K46/C52, EO 3,0 86,5 13,5 2,4 1519 29 17 2 “ 3,0 88,4 11,6 2,52 1806 1,96 30 18 1 K46/C49, OE 3,3 86,1 13,9 3,35 1523 0,83 31 18 2 “ 3,3 93,1 6,9 3,33 1627 0,37 32 19 2 K45/C49, SN 3,3 77,2 22,8 1,78 1436 33 20 2 K43/C49, NS 5,0 78,3 21,7 2,19 1487
Elaboración propia. FUENTE: CAÑAS Z., Oscar E. Y CARMONA A., Julián E. (1993) Factores de equivalencia vehicular. Trabajo Dirigido de Grado para optar el título de ingeniero civil. Universidad Nacional de Colombia – Sede Medellín. NOTA: Todos los vehículos van de frente. La duración de amarillo fue de 3 segundos. El carril se enumeró en forma ascendente iniciando por el adyacente al separador central.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-22
Según el estudio de FORERO (1999) los flujos de saturación obtenidos en la ciudad de Medellín se presentan en la Tabla 9.
TABLA 9. Flujos de saturación, s, tiempo perdido al inicio del verde λλλλ1 y ganado en el amarillo λλλλ2 en Medellín
Intersección
Maniobra
Flujo de saturación (ADE/h.v.)
λλλλ1 (s)
λλλλ2 (s)
Cra 43A / calle 1 sur Giro izquierda 1610 0,68 2,1 Cra 43A / calle 10 Frente sin pendiente 1864 1,9 2,86 Calle 10/cra 43A Frente con
pendiente 1800 1,68 2,10
FUENTE: FORERO M., José I. (1999) Estimación de parámetros para el modelo TRANSYT-7F en la ciudad de Medellín. Trabajo dirigido de grado para optar el título de ingeniero civil. Universidad Nacional de Colombia – Sede Medellín. Facultad Nacional de Minas. Medellín. Colombia.
5.5.3.2 Capacidad de un movimiento. En la Figura 36 se presenta en el eje de las abscisas de un sistema de ejes cartesianos del tiempo los intervalos rojo, verde y amarillo del semáforo, λ1, λ2, entreverde, tiempo perdido en la fase, inicio y terminación de la fase, duración del ciclo, el verde y el rojo efectivos. En el eje de las ordenadas se indica el flujo de saturación de dicho movimiento. El movimiento durante el ciclo consume el tiempo en dos períodos: el verde efectivo (ve) en el cual se supone que la cola de vehículos se descarga a flujo de saturación y el rojo efectivo (re) en el cual está detenida la cola y acumulándose los vehículos en ella. Se puede concluir que la capacidad (Q) del movimiento particular está dada por el área del rectángulo dibujado, que es una porción de toda la capacidad en el ciclo dada por la siguiente expresión:
cv
sQ e=
Donde:
Q= Capacidad del movimiento en veh/h
S= flujo de saturación en veh/h.v.
ve= Duración del verde efectivo [s]
c= Duración del ciclo [s]

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-23
FUENTE: Elaboración propia.
FIGURA 36. Ilustración del verde y rojo efectivos y capacidad del movimiento.
5.5.4 Entreverde (I). Según GIBSON, 1988, es el tiempo que media entre dos verdes del semáforo sucesivos. Está constituido por la suma del amarillo (AM) y el todo-rojo (RR) y en algunos casos, como en Colombia y Cuba, se incluye el rojo-amarillo (R/A). Ver Figura 37. El tiempo de rojo-amarillo se utiliza para reducir el tiempo perdido al inicio del verde (λ1) y no debería utilizarse simultáneamente con el todo-rojo porque tienen funciones opuestas. Es importante tener en cuenta que el entreverde está constituido por el amarillo y todo-rojo obtenidos del movimiento que pierde el derecho de paso pero el entreverde es asignado al movimiento que lo seguirá, es decir, el que gana el derecho de paso.
FUENTE: Elaboración propia.
FIGURA 37. Ilustración del entreverde.

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-24
( )[ ]I AM RR o RA= +
Donde :
I = Entreverde del movimiento que gana el derecho de paso [s]
AM = Duración del intervalo de amarillo del movimiento que pierde el derecho de paso. [s].
RR = Duración del intervalo de todo-rojo del movimiento que pierde el derecho de paso. [s].
R/A = Duración del intervalo de rojo-amarillo = 2 s
5.5.4.1 Amarillo (AM). Es la indicación del semáforo que se utiliza para prevenir la aparición del rojo y se diseña teniendo en cuenta el tiempo necesario para reaccionar ante la indicación amarilla y realizar la maniobra de frenado antes de la línea de detención en condiciones seguras. Ver Figura 37. Su duración generalmente está entre 3 y 5 segundos y está definida por la siguiente expresión:
[ ]gidTRAM
22 ++= υ
Donde:
TR = Tiempo de reacción del conductor [s] ≈ 1 s
v = Velocidad a la que se circulan los vehículos por la vía sin influencia del semáforo [m/s]
g = Aceleración de la gravedad = 9,8 m/s2
i = Pendiente longitudinal de la vía [%]. Signo negativo si es descendente y viceversa.
d = tasa de deceleración o frenado = 2,5 m/s2
En la Figura 38 se ilustran los valores que toma por la expresión mencionada para los intervalos de velocidad indicados y las pendientes longitudinales desde 5% hasta –5%. Si se sigue la recomendación de utilizar amarillo con duración entre 3 y 5 segundos correspondería a velocidades entre 28 km/h y 86 km/h para las pendientes mencionadas. Se recomienda que para duraciones de amarillo superiores a 5 segundos (velocidades

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-25
mayores a 58 km/h y pendientes menores a –5%) se asuma el excedente dentro de la duración del todo-rojo.
1020304050
60708090
100
1 2 3 4 5 6 7
AMARILLO (segundos)
VE
LOC
IDA
D (k
m/h
)
543210-1-2-3-4-5
FUENTE: Elaboración propia.
FIGURA 38. Variabilidad del amarillo
5.5.4.2 Todo-rojo (RR). Es el tiempo que requiere el vehículo que pierde su derecho de paso en la intersección semaforizada para que una vez dentro de ella no sea colisionado por el vehículo que gana el derecho de paso. Cuando la duración el amarillo resulta muy larga (mas de 5 segundos), de manera que pueda generar riesgos de ser irrespetada, se puede sustituir el tiempo adicional por este tiempo de todo-rojo. Figura 39. Se calcula con la siguiente expresión:
1
1
+
+−+=i
i
i
ii
vd
vldRR
Donde :
di = Distancia desde la línea de detención del movimiento que pierde el derecho de paso y el punto de conflicto con el movimiento que gana el derecho de paso [m]
li = Longitud del vehículo que pierde el derecho de paso [m].
vi = Velocidad de aproximación del vehículo que pierde el derecho de paso [m/s]

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-26
di+1 = Distancia desde la línea de detención del movimiento que gana el derecho de paso hasta el punto de conflicto con el movimiento que pierde el derecho de paso.
vi+1 = Velocidad de aproximación del vehículo que gana el derecho de paso [m/s]
FUENTE: Elaboración propia.
FIGURA 39. Ilustración del todo-rojo.
5.5.5 Verde mínimo. La duración del verde vehicular tiene por lo general un valor mínimo entre 6 y 10 segundos (vmin). El verde peatonal está compuesto por la duración del verde peatonal propiamente dicho (vp) y el intermitente (vi). El primero esta dado por el máximo entre 5 segundos y el tiempo necesario para cruzar la mitad del ancho del acceso o cruce peatonal a velocidad normal; y el segundo, se obtiene del tiempo necesario para cruzar todo el acceso o cruce peatonal a velocidad normal. A continuación se indica el cálculo de tales valores y del verde mínimo peatonal [vmin (peatonal)]. Ver la Figura 40.
( ) [ ]( )
( )
+=
∗=
=
+==
aamaxpeatonalv
amaxvp
avi
vivppeatonalvvehicularv
min
min
min
1141
5
4125
41
106
,,,
,,
,
,

CAPÍTULO 5. SEMÁFOROS DE TIEMPO FIJO
5-27
FUENTE: Elaboración propia.
FIGURA 40. Ilustración del verde mínimo vehicular y peatonal

CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-1
6 COORDINACION DE SEMÁFOROS. Según el manual de Dispositivos de Control del Tránsito de Chile y el Manual del programa TRANSYT-7F, 1991, la coordinación de semáforos es una de las formas más eficientes de reducir demoras, consumo de combustible, contaminación y accidentes. La coordinación de semáforos consiste en la sincronización de los programas de tiempo de los semáforos con el propósito de favorecer la progresión del tránsito, es decir, que los grupos de vehículos (pelotones) avancen a lo largo de la vía o rutas (sucesión de vías) manteniendo una velocidad compatible con las características geométricas de la vía que recorre y el nivel de servicio del tránsito, experimentando el mínimo de demoras y detenciones. La coordinación exige que todas las intersecciones tengan la misma duración de ciclo. Como puede deducirse la coordinación se puede analizar y calcular para una sola vía arteria o para una red, pero sólo en la primera se puede realizar manualmente con relativa facilidad; para ambos casos puede recurrirse al uso de programas computacionales especialmente creados para tal propósito como son el SIGOP, MAXBAD, PASSER, INTEGRATION o TRANSYT, a este último se dedicará un anexo especial. En principio se coordinan semáforos a lo largo de un corredor. Esquemas sencillos como ese pueden diseñarse a veces mediante técnicas gráficas (Banda u ola verde). Si el corredor tiene tránsito en dos sentidos y semáforos irregularmente espaciados, puede ser difícil, o incluso imposible ofrecer una "banda u ola verde" sin interrupciones que satisfaga la demanda. Estos planes son generalmente fijos y calculados sobre la base de datos históricos de flujos y velocidades. Los progresos en el diseño y manufactura de los computadores han permitido su uso en la operación de sistemas coordinados. Cuando se usa un computador no solo se puede cubrir un área geográfica más grande, sino que también el control puede hacerse más elaborado y es posible agregar otros tipos de servicios complementarios, como por ejemplo la detección de fallas. 6.1 SISTEMAS SIN COMPUTADOR. 6.1.1 Sistemas con planes fijos. Es aquí donde nace el concepto de controlador maestro. Los planes se calculan exteriormente y se implementan en cada controlador local. Estos sistemas utilizan señales eléctricas para indicar los cambios de fase. Pueden basarse en cronómetros que funcionan
CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-2
con la frecuencia del servicio eléctrico (subestación común para que no se pierda el sincronismo), o cronómetros de gran precisión. En este caso no se requieren cables, pero la coordinación se comenzará a perder a partir de cierto tiempo, lo que requiere observación y volver a coordinar. Las señales para el cambio pueden provenir del controlador maestro a través de cables nuevos o existentes. Se pueden implementar planes para distintas horas del día a fin de responder adecuadamente a la demanda. Hay sistemas coordinados que utilizan señales de radio para transmitir las instrucciones de control lo cual evita la construcción de canalizaciones, colocación de ductos y cables eléctricos evitando los consecuentes costos, demoras y molestias a la ciudadanía pero su utilización puede verse restringida a aquellos lugares donde el ruido electrónico no interfiera las señales. 6.1.2 Sistemas semiflexibles. En este caso, los semáforos funcionan con un ciclo común el cual se divide en una parte fija y una no controlada. La parte fija es la que se encarga de mantener la progresión o la coordinación en la arteria principal. Si hay demanda en alguna de las calles secundarias, esta se satisface durante la parte no controlada del ciclo. Esta parte no controlada funciona entonces como un semáforo accionado por el tránsito. 6.2 SISTEMAS CONTROLADOS POR UN COMPUTADOR En general, en los sistemas controlados por computador, ver Figuras 41 y Figura 42, éste no sólo se encarga de enviar indicaciones de cambio de fase a los controladores locales, sino que efectúa otras acciones como las siguientes:
a) Facilita el movimiento de vehículos de emergencia (ambulancias, bomberos, policía) ofreciéndoles una banda de verde especial.
b) Proporciona leyendas variables, que indiquen por ejemplo el cambio de sentido de una calzada o carril.
c) Ofrece información sobre el estacionamiento disponible.
d) Realiza aforos automáticos.
e) Comprueba el buen funcionamiento de los controladores locales incluso hasta el nivel de funcionamiento de los bombillos si es necesario.
Generalmente estos sistemas se complementan con el uso de televisión de circuito cerrado para ayudar a descubrir y resolver problemas locales de tránsito.
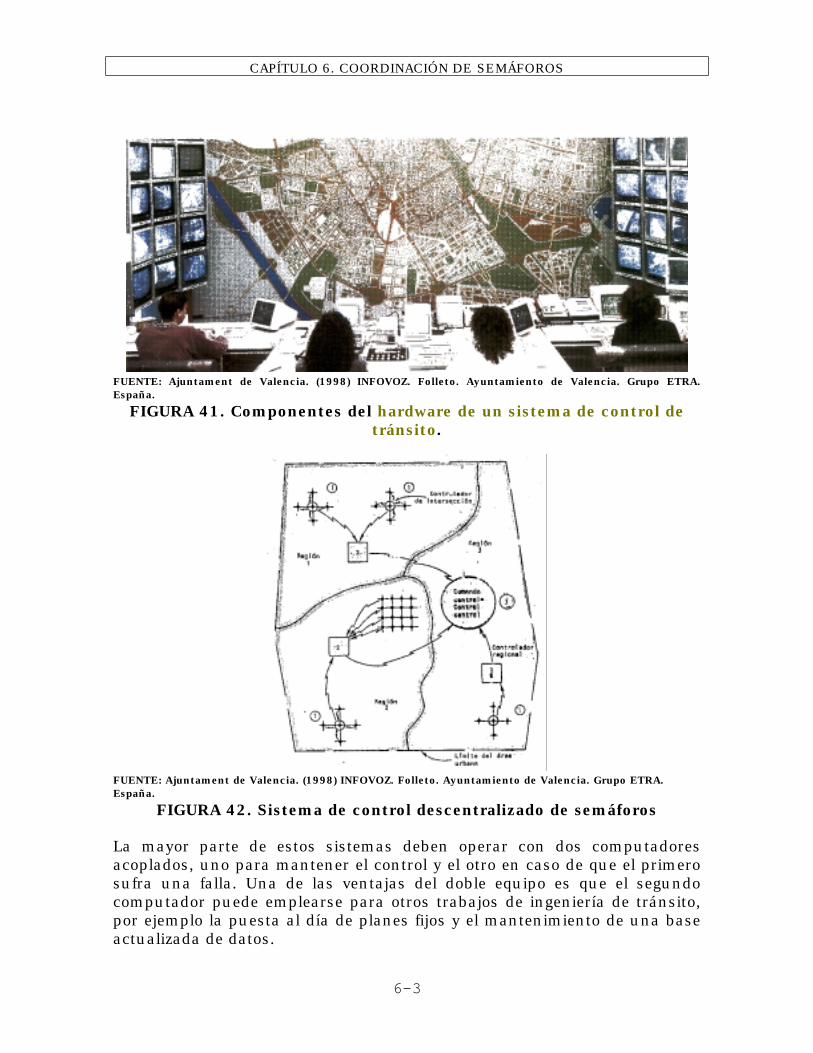
CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-3
FUENTE: Ajuntament de Valencia. (1998) INFOVOZ. Folleto. Ayuntamiento de Valencia. Grupo ETRA. España.
FIGURA 41. Componentes del hardware de un sistema de control de tránsito.
FUENTE: Ajuntament de Valencia. (1998) INFOVOZ. Folleto. Ayuntamiento de Valencia. Grupo ETRA. España.
FIGURA 42. Sistema de control descentralizado de semáforos La mayor parte de estos sistemas deben operar con dos computadores acoplados, uno para mantener el control y el otro en caso de que el primero sufra una falla. Una de las ventajas del doble equipo es que el segundo computador puede emplearse para otros trabajos de ingeniería de tránsito, por ejemplo la puesta al día de planes fijos y el mantenimiento de una base actualizada de datos.
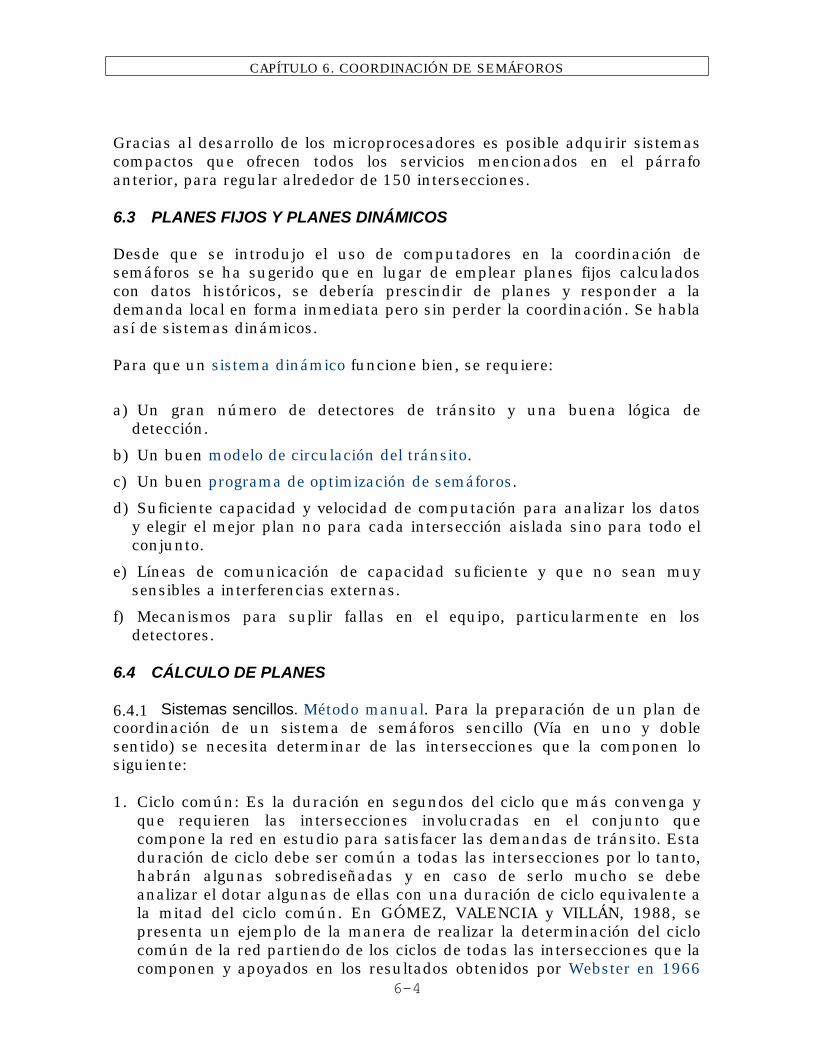
CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-4
Gracias al desarrollo de los microprocesadores es posible adquirir sistemas compactos que ofrecen todos los servicios mencionados en el párrafo anterior, para regular alrededor de 150 intersecciones. 6.3 PLANES FIJOS Y PLANES DINÁMICOS Desde que se introdujo el uso de computadores en la coordinación de semáforos se ha sugerido que en lugar de emplear planes fijos calculados con datos históricos, se debería prescindir de planes y responder a la demanda local en forma inmediata pero sin perder la coordinación. Se habla así de sistemas dinámicos. Para que un sistema dinámico funcione bien, se requiere:
a) Un gran número de detectores de tránsito y una buena lógica de detección.
b) Un buen modelo de circulación del tránsito.
c) Un buen programa de optimización de semáforos.
d) Suficiente capacidad y velocidad de computación para analizar los datos y elegir el mejor plan no para cada intersección aislada sino para todo el conjunto.
e) Líneas de comunicación de capacidad suficiente y que no sean muy sensibles a interferencias externas.
f) Mecanismos para suplir fallas en el equipo, particularmente en los detectores.
6.4 CÁLCULO DE PLANES 6.4.1 Sistemas sencillos. Método manual. Para la preparación de un plan de coordinación de un sistema de semáforos sencillo (Vía en uno y doble sentido) se necesita determinar de las intersecciones que la componen lo siguiente: 1. Ciclo común: Es la duración en segundos del ciclo que más convenga y
que requieren las intersecciones involucradas en el conjunto que compone la red en estudio para satisfacer las demandas de tránsito. Esta duración de ciclo debe ser común a todas las intersecciones por lo tanto, habrán algunas sobrediseñadas y en caso de serlo mucho se debe analizar el dotar algunas de ellas con una duración de ciclo equivalente a la mitad del ciclo común. En GÓMEZ, VALENCIA y VILLÁN, 1988, se presenta un ejemplo de la manera de realizar la determinación del ciclo común de la red partiendo de los ciclos de todas las intersecciones que la componen y apoyados en los resultados obtenidos por Webster en 1966

CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-5
sobre la insensibilidad relativa de la demora vehicular dentro del intervalo de ciclos entre 0,67 y 15 veces el ciclo óptimo.
2. Reparto del ciclo: Es la distribución de la duración del ciclo común para
proporcionar el tiempo de verde del semáforo a cada movimiento de cada intersección. Esta distribución debe satisfacer las demandas del tránsito de cada intersección en los periodos de diseño determinados para la red. Puede aplicarse cualquiera de los métodos que existen en la literatura para semáforos de tiempo fijo y que sea apropiado para las condiciones locales (En los anexos se presentan dos ejemplos aplicando los métodos de AKCELIK, 1981 y WEBSTER, 1966) y tendiendo en cuenta que el ciclo debe ser el común a todas las intersecciones.
3. Desfases : Es el número de segundos que tarda en aparecer la indicación
de luz verde en un semáforo cualquiera, después de un instante dado, que se toma como punto de referencia. Se obtiene luego de realizar un proceso de "tanteo" (manual) para establecer la coordinación más adecuada o mediante la aplicación de programas computacionales especializados. Estos desfasamientos dependen de las condiciones existentes y de las corrientes vehiculares a favorecer.
6.4.1.1 Procedimiento manual o por "tanteo". Antes de todo debe haberse definido el ciclo común de la red y el reparto del ciclo en cada intersección semaforizada como se ha dicho. Para facilitar la determinación de los desfasamientos se usa el diagrama tiempo-espacio, el cual es un sistema de coordenadas cartesianas en donde el eje de las ordenadas representa las distancia en metros medidas a lo largo de la vía a coordinar y el eje de las abscisas los tiempos en segundos o porcentaje del ciclo contados partir de cierto instante tomado como referencia. La Figura 43 presenta un diagrama tiempo-espacio y sirve de orientación a lo expuesto. En el eje del tiempo se hacen marcas igualmente espaciadas que representan la duración de ciclo común. Por líneas paralelas al eje del tiempo y trazadas por la ordenada que representa la ubicación de cada intersección se dibuja el reparto del ciclo de cada una indicando con franjas rojas el rojo efectivo (re = c - ve) y con franjas en negro el verde efectivo (ve = v - λ1 + λ2, donde: λ1 = tiempo perdido al inicio del verde y λ2= tiempo ganado en el amarillo) ó de manera aproximada el verde más amarillo. Este reparto de tiempo se debe iniciar con la intersección que servirá de referencia, o mejor, con el movimiento cuyo inicio define el instante de referencia de los desfases con las demás intersecciones y sus movimientos a lo largo de la vía a coordinar pues con respecto a tal instante se asociará la operación del controlador de la red coordinadora. En la Figura 43 se representa la coordinación de los semáforos a lo largo de la calle 44 (San Juan) de la ciudad de Medellín en la cual la carrera 79AA

CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-6
marca el instante de desfase cero.
Elaboración propia.
FIGURA 43. Diagrama tiempo-espacio de la Avenida San Juan entre carrera 79AA y carrera 65 para el periodo pico de la mañana (Entrada al
centro de la ciudad). En la Figura 43 se observan las bandas de verde que son franjas inclinadas, limitadas por líneas paralelas, ubicadas sobre los verdes efectivos consecutivos de las intersecciones. El ancho de banda es la separación en segundos entre las líneas que la limitan y medido en el sentido de las abscisas, representa el intervalo en segundos entre el primer y último vehículo del mayor grupo que puede pasar por todos los semáforos sin detenerse; la eficiencia de la banda se mide relacionando su ancho y la duración del ciclo en segundos y expresada en porcentaje. La velocidad del movimiento del grupo de vehículos que circula a lo largo de la banda (ola verde) es:

CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-7
3,6* [s] anteriores puntos losde abscisas lasentre Diferencia
[m]banda la de tivosrepresenta puntos dosde ordenadas lasentre Diferencia= ]h
km[ V
6.4.1.1.1 Coordinación de las vías en sentido único: Para este propósito se tienen dos alternativas para definir los desfasamientos, una de ellas es obtener el desfasamiento (D) entre semáforos consecutivos escogiendo previamente la velocidad de progresión del tránsito de acuerdo a las condiciones de circulación de la vía, mediante la siguiente expresión:
]h
km[ oestablecid progresivo movimiento del Velocidad
3,6* [m] semaforosentre Distancia = [s] D
La segunda alternativa es obtener el desfasamiento del gráfico siguiendo el siguiente procedimiento general para la construcción del plan de coordinación: 1. Trace líneas paralelas al eje de las ordenadas y por marcas hechas en el
eje de las abscisas (Tiempo) espaciadas por la duración del ciclo común. De similar forma trazar líneas paralelas al eje de las abscisas y por los puntos que representan las ubicaciones de las intersecciones en el eje de las ordenadas (Espacio).
2. Determine la velocidad de progresión del tránsito: El valor que se tome
debe representar la velocidad media a la que circularían los vehículos bajo las condiciones propias de la vía y sin la influencia del semáforo, es decir, como si estuviese en verde. No puede representar una velocidad muy baja ni muy alta, porque la banda diseñada no sería utilizada eficientemente por los grupos de vehículos que circulan, pues, los más rápidos llegarían prematuramente a la intersección de adelante y experimentarían demoras y detenciones excesivas y aquellos más lentos llegarían muy tarde al verde del semáforo de adelante desaprovechando tal tiempo para circular.
3. Trazar una línea inclinada a través del diagrama coincidiendo con el
inicio del verde efectivo de la primera intersección, que se toma como referencia para los desfases (El controlador se asocia a este movimiento) y con la pendiente que represente la velocidad predefinida en el paso anterior.
CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-8
4. El punto de corte de esta línea y la paralela al eje del tiempo que pasa
por cada intersección es el inicio del verde efectivo correspondiente. 5. El desfasamiento entre intersecciones sucesivas puede ser verificado
leyendo directamente de la gráfica resultante y se expresa en segundos reduciendo su valor, en caso de ser mayor que la duración del ciclo, el número de segundos del ciclo hasta que sea menor que este.
El ancho de la banda si todos los semáforos tienen igual ciclo y reparto será igual al verde efectivo, en caso contrario, estaría restringido por el verde efectivo más corto. En la Figura 43 se pueden observar los desfasamientos en segundos desde el punto de referencia (Inicio del verde del movimiento en la carrera 79AA) y el inicio de cada verde efectivo en cada intersección, además, la velocidad de progresión en el sentido favorecido de 40 km/h, su ancho de banda de 53 segundos que arroja una eficiencia del 53%; para el sentido no favorecido ha resultado una velocidad de 40,5 km/h que es muy buena lo cual no siempre se da pues lo que interesa en este periodo es dar prioridad a las condiciones exigentes del tránsito que entra a la ciudad y un ancho de banda de 12 segundos que si es estrecho pero compatible con la importancia dada a los sentidos de circulación en este período de diseño. El ancho de banda del sentido favorecido es de 53 segundos, la calzada de la Avenida San Juan que entra al centro de la ciudad tiene dos carriles continuos y por trayectos tiene tres y cuatro, pero considerando un criterio conservador sólo se tienen en cuenta dos, puesto que los carriles adicionales en dichos trayectos son utilizados para el estacionamiento de vehículos particulares y paradero de buses inhabilitándolos para la progresión del tránsito. Si se supone un intervalo vehicular de 2 segundos, ancho de banda de 53 segundos y dos carriles de circulación podría pasar un pelotón de vehículos de 53 en cada ciclo de 100 segundos que en la hora resultaría en 1908 vehículos para el sentido favorecido viajando a 40 km/h. Para que este plan de coordinación funcione adecuadamente debe mantenerse la velocidad de progresión, por ejemplo, colocando mensajes en pasacalles indicando la recomendación de conservar la velocidad de progresión utilizada y evitar el uso indebido de los semáforos como obstrucción del área común de las intersecciones, cruce en el amarillo o en rojo, exceso de maniobras de estacionamiento de vehículos particulares y parada de buses (o su reglamentación). En el sentido desfavorecido se puede hacer un análisis equivalente.
CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-9
6.4.1.1.2 Coordinación en vías con circulación en ambos sentidos.
Para este caso se pueden obtener tres planes de coordinación que favorezca la circulación:
a. En un sentido.
b. En el sentido contrario.
c. En ambos sentidos. En los dos primeros planes se procede igual que en vías de sentido único. Sin embargo, en la mayoría de los casos se debe hacer pequeños ajustes en los desfases para no entorpecer demasiado la circulación del tránsito que viene en sentido contrario al preferido; en tal caso, la demanda de tránsito es menor y al permitir velocidades mayores, éstas son compatibles con los anchos de banda angostos y velocidades altas que podrían resultar. Mediante el ajuste individual de semáforos, será posible obtener alguna mejora en la progresión para la dirección no preferida. En la Figura 44 se ilustra el correspondiente al otro sentido mostrado en la Figura 43, estas dos figuras sirven de ejemplo para los casos a) y b).

CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-10
Elaboración propia.
FIGURA 44. Diagrama tiempo-espacio de la Avenida San Juan entre carrera 79AA y carrera 65 para el periodo pico de la tarde (Salida del
centro de la ciudad) Para el caso c. el problema es más difícil de resolver y muchas veces no tiene solución única. En este caso debe haber cierta simetría en el diagrama tiempo-espacio (anchos de bandas y velocidades iguales). Para determinar los desfasamientos es preciso efectuar varios tanteos (variando velocidades) y hacer varios arreglos para llegar a la solución más favorable, por ejemplo: establecer diferentes velocidades para el movimiento progresivo en distintos tramos de la vía. (Ver Figura 45).
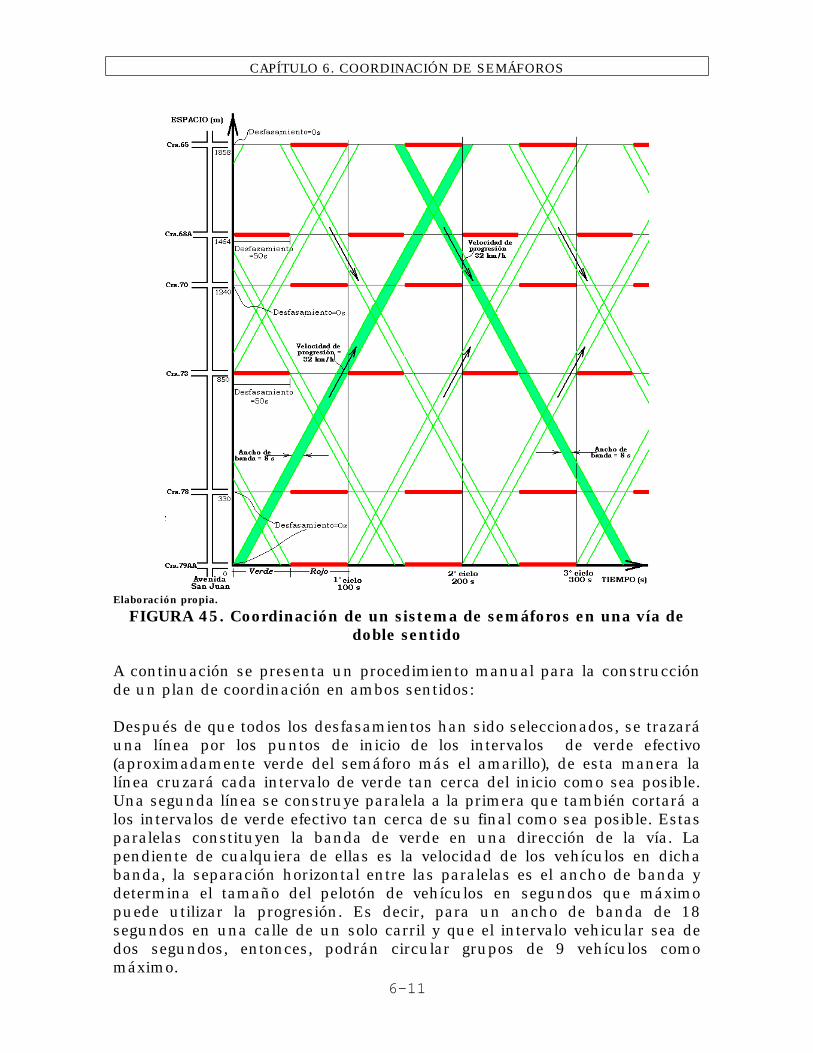
CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-11
Elaboración propia.
FIGURA 45. Coordinación de un sistema de semáforos en una vía de doble sentido
A continuación se presenta un procedimiento manual para la construcción de un plan de coordinación en ambos sentidos: Después de que todos los desfasamientos han sido seleccionados, se trazará una línea por los puntos de inicio de los intervalos de verde efectivo (aproximadamente verde del semáforo más el amarillo), de esta manera la línea cruzará cada intervalo de verde tan cerca del inicio como sea posible. Una segunda línea se construye paralela a la primera que también cortará a los intervalos de verde efectivo tan cerca de su final como sea posible. Estas paralelas constituyen la banda de verde en una dirección de la vía. La pendiente de cualquiera de ellas es la velocidad de los vehículos en dicha banda, la separación horizontal entre las paralelas es el ancho de banda y determina el tamaño del pelotón de vehículos en segundos que máximo puede utilizar la progresión. Es decir, para un ancho de banda de 18 segundos en una calle de un solo carril y que el intervalo vehicular sea de dos segundos, entonces, podrán circular grupos de 9 vehículos como máximo.
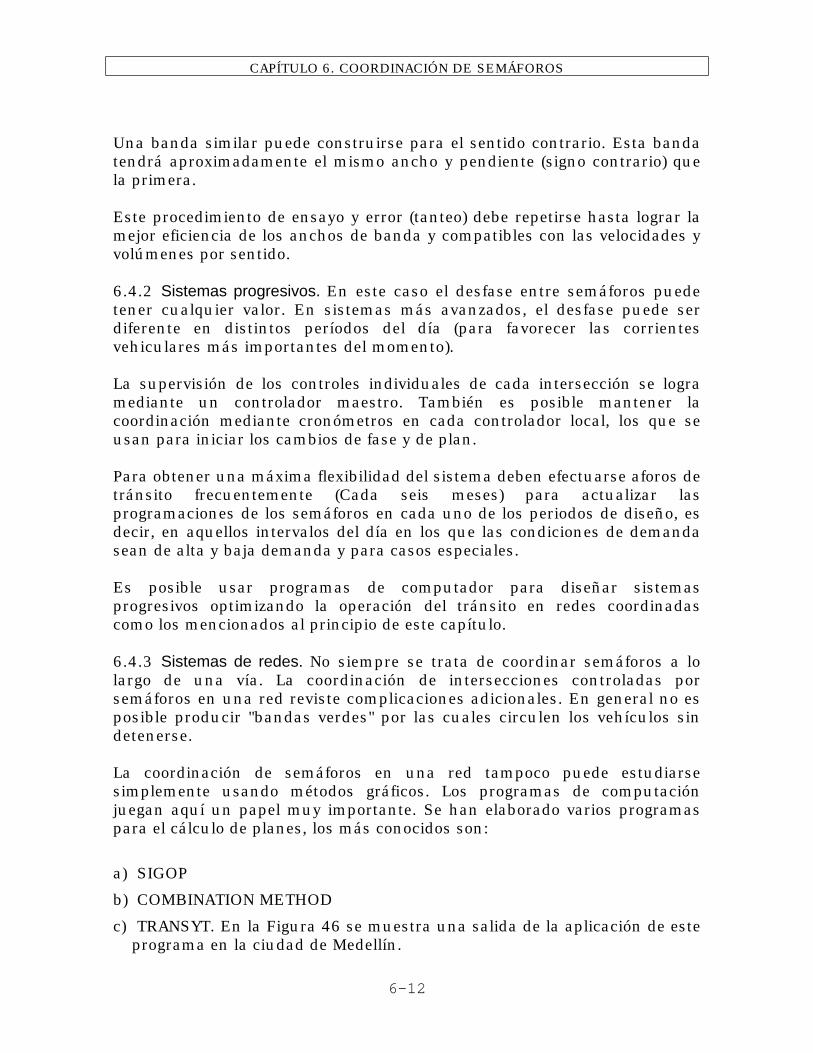
CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-12
Una banda similar puede construirse para el sentido contrario. Esta banda tendrá aproximadamente el mismo ancho y pendiente (signo contrario) que la primera. Este procedimiento de ensayo y error (tanteo) debe repetirse hasta lograr la mejor eficiencia de los anchos de banda y compatibles con las velocidades y volúmenes por sentido. 6.4.2 Sistemas progresivos. En este caso el desfase entre semáforos puede tener cualquier valor. En sistemas más avanzados, el desfase puede ser diferente en distintos períodos del día (para favorecer las corrientes vehiculares más importantes del momento). La supervisión de los controles individuales de cada intersección se logra mediante un controlador maestro. También es posible mantener la coordinación mediante cronómetros en cada controlador local, los que se usan para iniciar los cambios de fase y de plan. Para obtener una máxima flexibilidad del sistema deben efectuarse aforos de tránsito frecuentemente (Cada seis meses) para actualizar las programaciones de los semáforos en cada uno de los periodos de diseño, es decir, en aquellos intervalos del día en los que las condiciones de demanda sean de alta y baja demanda y para casos especiales. Es posible usar programas de computador para diseñar sistemas progresivos optimizando la operación del tránsito en redes coordinadas como los mencionados al principio de este capítulo. 6.4.3 Sistemas de redes. No siempre se trata de coordinar semáforos a lo largo de una vía. La coordinación de intersecciones controladas por semáforos en una red reviste complicaciones adicionales. En general no es posible producir "bandas verdes" por las cuales circulen los vehículos sin detenerse. La coordinación de semáforos en una red tampoco puede estudiarse simplemente usando métodos gráficos. Los programas de computación juegan aquí un papel muy importante. Se han elaborado varios programas para el cálculo de planes, los más conocidos son:
a) SIGOP
b) COMBINATION METHOD
c) TRANSYT. En la Figura 46 se muestra una salida de la aplicación de este programa en la ciudad de Medellín.

CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-13
d) PASSER
e) MAXBAND Los programas suelen producir mejores resultados que las coordinaciones realizadas en forma manual. Según GÓMEZ, VALENCIA Y VILLÁN, 1988, recomienda el programa TRANSYT en la preparación de planes fijos de coordinación de semáforos. 6.5 REQUISITOS PARA LA INSTALACIÓN DE SISTEMAS COORDINADOS. 6.5.1 Requisitos generales. Al igual que existen requisitos para la instalación de semáforos también es necesario adoptarlos para la instalación de sistemas coordinados. La adopción de un sistema coordinado implica varios costos en términos de:
a) Nuevo equipo de control central.
b) Modificación de intersecciones (Geométricas, obras de arte, ductos)
c) Equipo de comunicaciones (Radio, detectores, sensores, sistemas de televisión, cableado, modems, controladores adecuados).
d) Estudios (aforos, preparación de planes, etc.).
e) Instrucción de personal (Especialistas en ingeniería de tránsito, ingenieros electrónicos y de sistemas, auxiliares, mecánicos)
f) Mantenimiento de equipo (Talleres, repuestos, equipos, transporte especial)
g) Puesta al día de planes (Software apropiado, vehículos supervisores y de actualización de la coordinación).
Si se instala un sistema coordinado donde los beneficios (Ahorros en tiempo de viaje, costos de operación vehicular, reducción en consumo de combustible y contaminación ambiental debido a la reducción de demoras y detenciones por la coordinación) no logran superar los costos mencionados se estará haciendo una inversión sin rentabilidad financiera y/o económica. Es posible emplear un programa de computación como TRANSYT para estimar los beneficios que se producirán con la instalación de un sistema coordinado siempre que sea calibrado para las condiciones de cada ciudad, respecto a esto FORERO, 1999, hizo para la ciudad de Medellín un estudio. Sin embargo, estos beneficios son solo una estimación y a menudo, al menos parte de estos, podrían obtenerse con solo poner al día los programas de los semáforos existentes. Por ello, algunos países han adoptado requisitos básicos para la instalación de estos sistemas.
CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-14
FUENTE: GOMEZ, Dorian; VALENCIA A., Víctor G. Y VILLAN R., Fernando. (1988). Aplicación del programa TRANSYT para la optimización de semáforos en Colombia. Tesis de Maestría en Ingeniería de Tránsito y Transporte. Instituto de Vías. Popayán, COLOMBIA.
FIGURA 46. Diagrama tiempo-espacio de la Avenida Colombia con ciclo de 90 segundos entregado por TRANSYT-7F.
6.5.2 Requisitos básicos. 6.5.2.1 Sistemas que utilizan computador central. Estos pueden adoptarse en sistemas viales en los que hay por lo menos 4 intersecciones controladas por semáforos por kilómetro cuadrado o alternativamente al menos 4 semáforos por kilómetro de vía.
CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-15
Se requiere además que el sistema total tenga al menos 50 intersecciones controladas por semáforo. No hay límite superior. Cada uno de los semáforos mencionados aquí debe encontrarse plenamente justificado por al menos uno de los criterios mencionados en el Capítulo 2, excepto el criterio de mantenimiento de una progresión adecuada. En otras palabras, no basta con demostrar que el número o densidad de intersecciones controladas por semáforos es suficiente. Es necesario probar también que todos los semáforos mencionados se justifican por otro requisito. 6.5.2.2 Sistemas más sencillos (sin computador, sin cables). Son recomendables en el caso de una vía con flujo homogéneo y con poca o nula interferencia de calles laterales, se requiere que existan por lo menos 5 intersecciones controladas por semáforos separadas cada una por no más de 1000 metros. En el caso de calles normales se requiere el mismo criterio pero la separación máxima se reduce a 250 metros, debido a que los volúmenes de las calles laterales introducen perturbaciones en la progresión. Cada uno de estos semáforos debe estar justificado independientemente de acuerdo con los criterios mencionados en el punto anterior. 6.6 Consideraciones prácticas. 6.6.1 Costo. El tamaño físico y costo de los computadores ha bajado mucho y por otro lado las capacidades y funciones han aumentado rápidamente. El costo por intersección incluye equipo de transmisión de datos, obras civiles y modificaciones. Sin embargo, los beneficios de estos sistemas (si se encuentran justificados por los requisitos anteriores) son sustanciales y en general se estima que se recuperan los costos de instalación en el primer año de operaciones (en términos de tiempo ahorrado). Según GÓMEZ, VALENCIA y VILLÁN (1988) la coordinación de una red semaforizada en Medellín aumentó la velocidad promedio de los vehículos en un 10%. Cabe señalar que los beneficios dependen del cálculo de planes adecuados y de la calidad de los datos suministrados. Esto requiere un esfuerzo permanente de recolección de datos y puesta al día de planes. Los errores son más graves en un sistema centralizado que en uno independiente o jerarquizado. Generalmente al instalar un sistema coordinado se aprovecha para reemplazar equipo anticuado y en algunos casos mejorar la geometría de algunas intersecciones. Los costos en obras civiles, más el tendido de los

CAPÍTULO 6. COORDINACIÓN DE SEMÁFOROS
6-16
cables puede ser considerable. En algunos casos es posible arrendar líneas telefónicas para conectar controladores locales con el controlador central. Si bien esto reduce costos de inversión, puede resultar en altos costos de operación. La conexión por radio tiene atractivos pero también limitaciones impuestas por las interferencias de las señales numerosas en las ciudades grandes. 6.6.2 Normas. Es importante tener en cuenta que es muy probable que cualquier sistema de coordinación que se instale deba ser ampliado en el futuro. Es posible que, si se trata de un sistema vial, este llegue a formar parte de una red mayor en el futuro. Por ello, es necesario adoptar de antemano normas de comunicación y control. De este modo podrán instalarse equipos de diferentes fabricantes (que satisfagan esas normas) interconectados en un mismo sistema. Esto es de gran importancia para evitar que una ciudad no quede atada a un solo fabricante generando una dependencia que puede ser contraproducente. 6.6.3 Sistemas sin cable. Los sistemas sin cable utilizan la frecuencia de la red eléctrica para mantener la sincronización de cronómetros en cada controlador local. Esto requiere que todo el sistema este conectado a la misma subestación alimentadora para que el sincronismo no se pierda. Se requiere además de contar con un cronómetro (normalmente de cuarzo) de reserva para el caso de falla en el suministro de energía eléctrica y así aplicar el programa adecuado al restituirse la alimentación eléctrica. La imprecisión requerida es del orden de por lo menos 2 segundos al año. Un mantenimiento periódico una vez al año debe encargarse de actualizar planes y programas de tiempos. El empleo de microprocesadores electrónicos de bajo costo permite usar varios planes para distintos días y horas. Existe la posibilidad de reforzar el sincronismo de cronómetros mediante señales de radio.

CAPÍTULO 7. SEMÁFOROS PEATONALES
7-1
7 SEMÁFOROS PEATONALES¡Error! Marcador no definido.
7.1 DEFINICIÓN
Los semáforos para peatones son dispositivos especiales provistos de señales luminosas, instaladas con el propósito exclusivo de controlar el tránsito de personas en los cruces. Estas señales consisten en elementos luminosos con leyendas de CRUCE (PASE) y NO CRUCE (ALTO) o símbolos luminosos de una persona que está caminando (que simboliza CRUCE) y una persona que está parada (que simboliza NO CRUCE) Figura 47.
FIGURA 47. Diseño de semáforos peatonales.
7.2 REQUISITOS PARA SU INSTALACIÓN
Los semáforos para peatones se instalarán en combinación con las de los semáforos vehiculares que hayan satisfecho uno o más de los requisitos establecidos anteriormente para semáforos de tiempos fijos o accionados por el tránsito, bajo cualquiera de las siguientes circunstancias:
CAPÍTULO 7. SEMÁFOROS PEATONALES
7-2
a) Cuando se instala un semáforo vehicular justificado por el volumen de peatones.
b) Cuando los peatones y vehículos circulan durante la misma fase y se necesitan intervalos de despeje de peatones debidamente ajustados para reducir al mínimo la interferencia de vehículos y peatones.
c) Cuando se proporciona una fase exclusiva para el movimiento de peatones en una o más direcciones, deteniéndose todos los vehículos.
d) Cuando los movimientos de giro de un alto volumen de tránsito exigen una fase semiexclusiva de peatones para brindarles protección a conveniencia.
e) Cuando el movimiento de peatones es permitido en un lado de una intersección mientras que se detiene el tránsito continuo para proteger los movimientos de giro de otros vehículos en el otro lado de la intersección.
f) Cuando una intersección es tan amplia o complicada, o una calle tan ancha que los semáforos para los vehículos no servirán adecuadamente a los peatones.
g) Cuando la sincronización de las fases de los semáforos tienden a confundir a los peatones, si éstos se guían solamente por las indicaciones de los vehículos.
h) Cuando los peatones cruzan solamente parte de una calle, hasta una isla o desde una isla, durante una fase particular.
7.3 TIPO DE REGULACIÓN
La regulación de las indicaciones de los semáforos para peatones puede lograrse con el mecanismo de programación normalmente empleado en los semáforos ordinarios, en cuyo caso la fase o indicación para el peatón se da en un punto predeterminado durante cada ciclo; o bien la regulación puede hacerse de tal forma que permita el uso de botones (Detectores) para introducir la fase o indicación del peatón, según las necesidades del tránsito de peatones.

CAPÍTULO 7. SEMÁFOROS PEATONALES
7-3
Como regla general, debe evitarse la instalación de semáforos para peatones en sitios que no sean intersecciones. Sin embargo, cuando se precisa de tales debe emplearse el tipo de control accionado por el peatón, coordinado con las señales adyacentes.
7.4 REQUISITOS GENERALES DE DISEÑO
Los requerimientos de diseño para los semáforos peatonales incluyen los siguientes aspectos:
a) Las indicaciones peatonales deberán llamar la atención del peatón, siendo al mismo tiempo legibles de día y de noche, a cualquier distancia desde 3 metros hasta el ancho total a cruzar.
b) Todas las indicaciones peatonales deberán ser de forma rectangular o circular, y deberán llevar mensajes escritos o símbolos de CRUCE (PASE) o NO CRUCE (ALTO).
7.5 SIGNIFICADO DE LAS INDICACIONES
La interpretación para los semáforos para peatones es la siguiente:
a) La indicación NO CRUCE (ALTO) iluminada en color rojo en forma constante, quiere decir que un peatón no deberá atravesar la calle en dirección a la señal, mientras esté encendida.
b) La indicación intermitente de CRUCE (PASE o verde), significa que la luz del semáforo va a cambiar a la indicación de NO CRUCE (ALTO o rojo); por lo que los peatones no deberán iniciar el cruce de la calle en la dirección de la señal. Cualquier peatón que este cruzando en ese momento, deberá acelerar la marcha y seguir hasta la acera o hasta un separador de seguridad.
c) Una indicación de CRUCE (PASE) iluminada en verde fija, significa que los peatones que se encuentren frente al semáforo pueden cruzar la calle en la dirección del mismo.
CAPÍTULO 7. SEMÁFOROS PEATONALES
7-4
7.6 UBICACIÓN
Los semáforos peatonales se instalarán con su parte inferior a una altura no menor de 2.00 metros, ni mayor de 3.00 metros sobre el nivel de la acera, de tal manera que la indicación quede en la visual del peatón que tiene que ser guiado por dicha señal.
La indicación de NO CRUCE (ALTO) deberá estar montada directamente arriba de la indicación de CRUCE (PASE), o integrada en la parte alta de la misma señal.
Cada semáforo peatonal puede montarse separadamente, o en el mismo soporte con otras señales; si se monta junto con otros semáforos, deberá dejarse una separación entre ellos.
Los semáforos instalados en los cruces que no sean intersecciones deberán ajustarse a las normas usuales de ubicación que rigen para las caras de peatones y de tránsito vehicular.
7.7 FUNCIONAMIENTO
Las indicaciones para peatones serán de luz fija, excepto durante el intervalo de despeje, en el cual la indicación de CRUCE (PASE) será intermitente.
Cuando los semáforos de vehículos en la intersección estén operando intermitentemente, los semáforos para peatones permanecerán apagados.
Existen varias formas en las que se pueden combinar y operar las fases de los semáforos peatonales con las fases de los semáforos para vehículos. A continuación se describen cuatro combinaciones básicas:
a) Fase combinada para peatones y vehículos.
Es la disposición mediante la cual los transeúntes pueden avanzar por ciertos pasos de peatones paralelos a la circulación de los vehículos, permitiéndose a estos girar cruzando dichos pasos.
b) Fase semiexclusiva para peatones y vehículos.
Es la disposición de fases de los semáforos, según la cual los transeúntes pueden proceder a usar ciertos pasos de peatones, simultáneamente con circulaciones paralelas de vehículos o con otras circulaciones, en las que a los vehículos no se les permite cruzar los pasos peatonales.
CAPÍTULO 7. SEMÁFOROS PEATONALES
7-5
c) Fase con prioridad para peatones.
Es la disposición de fases en la cual se tiene una fase exclusiva para los peatones que cruzan la calle principal, antes de la fase para circulación de vehículos en la calle secundaria.
d) Fase exclusiva para peatones.
Es la disposición de fases que permite a los peatones cruzar la intersección en cualquier dirección, durante una fase exclusiva en la que todos los vehículos quedan detenidos.
En condiciones normales, el intervalo mínimo de CRUCE (PASE) no deberá ser menor de 7 segundos, para que los peatones tengan oportunidad de completar el cruce antes que aparezca el intervalo de despeje. Sin embargo, no es necesario que el intervalo CRUCE (PASE) sea igual o que exceda al tiempo total calculado para cruzar el ancho total de la calle, ya que muchos peatones podrán terminar de pasar durante el intervalo de despeje. La duración deberá ser suficiente para permitir al peatón bajarse de la acera y llegar hasta el centro del carril más lejano, antes que los vehículos que interfieren con su paso reciban la indicación de luz verde (la velocidad normal de marcha a pie se calcula a razón de 1.2 metros por segundo). Ver aparte sobre el verde mínimo en el capítulo de semáforos de tiempo fijo.
En calles con islas centrales de por lo menos 1.20 metros de ancho, sólo se necesita dejar tiempo suficiente para despeje de peatones en una fase, de manera que puedan cruzar desde el sardinel hasta la isla. En este caso, si el semáforo es accionado por los peatones, se necesita un detector adicional en la isla.
El semáforo para peatones deberá estar ubicado y regulado de manera que proporcione la máxima visibilidad en todo el cruce controlado.
7.8 ESTUDIOS DE INGENIERÍA DE TRÁNSITO
Se debe efectuar previamente una investigación total de las condiciones del tránsito y de las características de la intersección, para determinar si se justifica la instalación del semáforo, y obtener los datos necesarios para el proyecto y el plan de funcionamiento.
Dichos datos son:
a) Los aforos de peatones de cada cruce durante los mismos períodos de los vehículos y, además, durante las horas de mayor intensidad de circulación de peatones.

CAPÍTULO 7. SEMÁFOROS PEATONALES
7-6
Cuando se deba prestar a los niños y a las personas de edad una consideración especial, puede hacer la siguiente clasificación por grupos:
• Menores de 13 años.
• De 13 a 60 años.
• Mayores de 60 años.
b) Un diagrama que contenga detalles físicos, tales como características geométricas y canalizaciones.
7.9 DETECTORES
Los detectores en los semáforos peatonales (normalmente botones pulsadores), deberán quedar cerca del paso peatonal, cuando sea necesaria su operación por parte de los transeúntes. Para el uso general, la altura conveniente es de 1.00 metros a 1.25 metros medida desde arriba de la acera. Las señales de tipo permanente, deberán estar montadas arriba o junto con los detectores, explicando su propósito y uso. En ciertas partes, puede ser conveniente complementar esta señal con una más grande, suspendida sobre la acera, para llamar la atención hacia el botón pulsador en separadores en los que el peatón puede quedar sin protección.
Los botones pulsadores que tienen función especial, deberán incluir una caja que pueda ser cerrada para evitar su mal uso por parte del público en general.
Alternativamente a los botones pulsadores o acompañándolos se disponen los detectores infrarrojos los cuales registran automáticamente la presencia de peatones cuando ocupan el área adyacente al cruce peatonal, esta opción es apropiada para lugares donde se haya observado a usuarios invidentes pero deben ser acompañada las señales luminosas de SIGA, SIGA intermitente y ALTO con señales auditivas características previstas para dichos usuarios.
ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-1
A MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
Este anexo presenta un resumen de las definiciones, conceptos y criterios propuestos por Webster, 1966 para determinar los tiempos en semáforos de tiempo fijo que controlan el tránsito en intersecciones aisladas. Los temas que se tratarán son el flujo de saturación, tiempo perdido, demoras, ciclo óptimo y reparto del ciclo.
Posteriormente se aplica este procedimiento a través de un ejemplo y se hacen comentarios sobre su adaptabilidad al medio colombiano especialmente en Medellín.
A.1 RESUMEN
El método de Webster se fundamenta en el estudio de 100 intersecciones en la ciudad de Londres cuyo análisis permitió concluir sobre las influencias que ejerce sobre el tránsito o el flujo de saturación algunos aspectos como: Anchura del acceso, pendiente longitudinal de la vía, composición del tránsito vehicular, tránsito de giro a izquierda, tránsito de giro a derecha, circulación de peatones, presencia de vehículos estacionados sobre la vía y características generales del entorno a la intersección en diseño.
A continuación se presenta sucintamente la consideración de los efectos enumerados.
A.1.1 Efectos de la anchura del acceso. La anchura del acceso permite calcular el flujo de saturación en vehículos ligeros/hora de verde según el intervalo de anchuras del acceso, así:
Si las anchuras consideradas varían entre 5,5 y 18,3 metros, el flujo de saturación se obtiene aplicando la siguiente formula:
ws 525=
Donde:
w = anchura del acceso en metros
s = Flujo de saturación [veh. ligeros/hora de verde]
Si las anchuras consideradas varían entre 3,0 y 5,2 metros, el flujo de saturación se obtiene de la Tabla A.1.

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-2
TABLA A.1. Flujos de saturación para ancho de acceso entre 3,05 m y 5,2 m
s (v.l/h.v.) 1850 1875 1900 1950 2075 2250 2475 2700 w (m) 3,05 3,35 3,7 4,0 4,3 4,6 4,9 5,2
En períodos valle los valores antes estipulados para flujo de saturación resultan ser 6% menores. Este comportamiento se ve en la Figura A.1.
FUENTE: WEBSTER. (1966) Traffic Signals. Road Research Technical Paper Núm. 56. Road Research Laboratory, London. Traducción al español por: Ing. Luis Domínguez Pommerencke.
FIGURA A.1. Flujo de saturación según anchura del acceso.
Debido a que el flujo de saturación es una característica particular de cada movimiento vehicular en cada intersección ya que contempla la influencia de diferentes factores como la anchura del acceso, pendiente longitudinal de la vía, maniobra que se realice, composición vehicular, condiciones de la superficie de rodadura, etc., entonces, los valores propuestos por Webster son reflejo de las condiciones en Londres en dicha época cuando los vehículos tenían relaciones peso/potencia diferentes a los actuales así como los demás factores. Por lo anterior su aplicabilidad a nuestro medio es discutible en razón de las diferencias de condiciones pero pueden sustituirse sus valores por resultados provenientes de mediciones en el campo teniendo en cuenta que ellos solo deben tener involucrado los

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-3
efectos de movimientos de frente, la anchura del acceso o carril y solo automóviles porque los demás efectos que influyen el flujo de saturación serán considerados con los factores correspondientes, si esto no se tienen en cuenta se estaría repitiendo el efecto. En el capítulo de semáforos de tiempo fijo se presentan algunos valores para Medellín que solo consideran el efecto de automóviles circulando en pendientes suaves resultado del estudio de Cañas y Carmona (1993) que concluyen con un flujo de saturación representativo de 1650 veh/h.v.c. para anchura de carril entre 3 y 5 metros, pendientes menores a ±1% y automóviles en la corriente vehicular entre 53% y 98%.
A.1.2 Efecto de la pendiente longitudinal. La inclinación de la vía influye inversamente en la magnitud del flujo de saturación, es decir, aumentándolo el 3% por cada 1% de pendiente descendente y viceversa. Aquí la pendiente se obtiene correspondiente al desnivel de dos puntos, uno de ellos en la línea de detención y el otro a 60 metros atrás. Los estudios cubren pendientes entre +10% y –5%.
El intervalo de valores que cubre el efecto no es suficiente para algunos casos de intersecciones en vías del sector del Poblado en Medellín donde se han medido pendientes longitudinales del 15% pero en las que MARTINEZ, 1999 ha hecho mediciones de flujo de saturación que pueden utilizarse para considerar el efecto de estas cuestas pronunciadas y que aparecen en el capítulo de semáforos de tiempo fijo.
A.1.3 Efecto de la composición del tránsito. La presencia en el tránsito de los diversos tipos de vehículos se considera en la variación del volumen mediante los factores de equivalencia vehicular que se presenta en la Tabla A.2.
TABLA A.2. Factores de equivalencia vehicular según Webster.
Tipo de vehículo Factores de equivalencia vehicular (Vehículos ligeros/tipo de vehículo)
Vehículo pesado mediano 1,75 Bus 2,25
Camión + remolque 2,5 Automóvil 1
Moto 0,33 Bicicleta 0,2
Del estudio de Cañas y Carmona (1993) se obtuvieron algunos factores de equivalencia vehicular en intersecciones semaforizadas partiendo de mediciones de flujo de saturación en carriles con solo movimiento de frente según la Tabla A.3.

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-4
TABLA A.3. Factores de equivalencia vehicular según Cañas y Carmona (1993).
Tipo de vehículo Factores de equivalencia vehicular (Vehículos ligeros/tipo de vehículo)
Vehículo pesado mediano 1,56 Bus 1,56
Camión + remolque Automóvil 1
Moto 0,82 Bicicleta
FUENTE: CAÑAS y CARMONA (1993) Factores de equivalencia vehicular. Trabajo dirigido de Grado para optar el título de ingeniero civil. Universidad Nacional de Colombia – Sede Medellín. Medellín. Colombia.
A.1.4 Efecto del giro a izquierda. La maniobra de giro a izquierda que hacen los vehículos se tiene en cuenta calculando el flujo de saturación correspondiente según el caso que se trate, sin embargo, de los que considera este método solo tres se presentan en Colombia:
i) Sin tránsito opuesto y sin carriles exclusivos.
El flujo de saturación se obtiene como se ha mencionado en el primer numeral del resumen.
ii) Sin tránsito opuesto y con carriles exclusivos.
El flujo de saturación se obtiene con las siguientes formulas:
r
s531
1
1800,+
= Para un carril de giro exclusivo.
r
s531
1
3000,+
= Para dos carriles de giro o dos colas exclusivas.
Donde:
s = flujo de saturación [veh/h.v.]
r= Radio de giro en metros.
iii) Con tránsito opuesto y sin carriles exclusivos
Dentro de esta clasificación se pueden considerar cuatro situaciones:
ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-5
a) Debido al tránsito opuesto, los que giran a izquierda sufren demoras y ocasionan demoras a los que van de frente.
b) La presencia de los que giran a izquierda inhibe el uso del tal carril por los que van de frente.
Para estas dos primeras situaciones el efecto de giro a izquierda se tiene en cuenta considerando que un vehículo que realiza esta maniobra equivale a 1,75 vehículos que circulan de frente.
c) La presencia de vehículos que giran a izquierda al final del período de verde puede demorar la corriente transversal. La solución a este caso se puede observar con detalle en el aparte completo correspondiente.
d) El tránsito opuesto tiene carriles exclusivos entonces, no sufren demora el tránsito que circula de frente.
A.1.5 Efecto del giro a derecha. El efecto de esta maniobra se considera calculando el flujo de saturación en función del radio de giro y el flujo peatonal, según dos casos:
Si los vehículos que giran a derecha representan menos del 10% de todos los vehículos que usan el carril en cuestión, entonces, el flujo de saturación calculado inicialmente no sufre modificación alguna pues tal efecto ya está involucrado.
Si los vehículos que giran a derecha representan más del 10% de todos los vehículos que usan el carril en cuestión, entonces, el efecto se recoge considerando que para el exceso del 10% de los vehículos que giran a derecha cada vehículo equivale a 1,25 vehículos que van de frente.
A.1.6 Efecto de la presencia de peatones. Según las condiciones del lugar el efecto se considera afectando el flujo de saturación por un factor consignado en la Tabla A.4
TABLA A.4. Factor por tipo de lugar.
Tipo de lugar Factor sobre s Bueno 1,20
Promedio 1,0 Pobre 0,85
A.1.7 Efecto del vehículo estacionado. La presencia de un vehículo estacionado en el acceso se experimenta como una pérdida de la anchura efectiva en el acceso en la línea de detención.

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-6
( )k
zanchuradeefectivaPérdidaP 62790681 ,,, −−==
Donde:
z= distancia entre la línea de detención y el parachoques delantero del vehículo estacionado en la vía.
k= tiempo de verde [s]
≥<
=627
607607,,
,,,zsiz
mzsiz
≤
=casootroenP
ndevehsinoautoesnovehículoelsiPPsi
P,
gra,,,51
00
A.1.8 Efecto de las características del lugar. Este aspecto se trata igual que el de peatones.
A.1.9 Tiempo perdido por fase. Está dado por la expresión siguiente:
l = l1 + l2 ≈ 2 segundos por fase pero varía entre 0 y 7 segundos en Londres.
En la Figura A.2 se ilustra el tiempo perdido considerado por Webster y que se asocian a las definiciones de λ1 y λ2 de la Figura A.3.
FUENTE: WEBSTER. (1966) Traffic Signals. Road Research Technical Paper Núm. 56. Road Research Laboratory, London. Traducción al español por: Ing. Luis Domínguez Pommerencke.
FIGURA A.2. Flujo de saturación
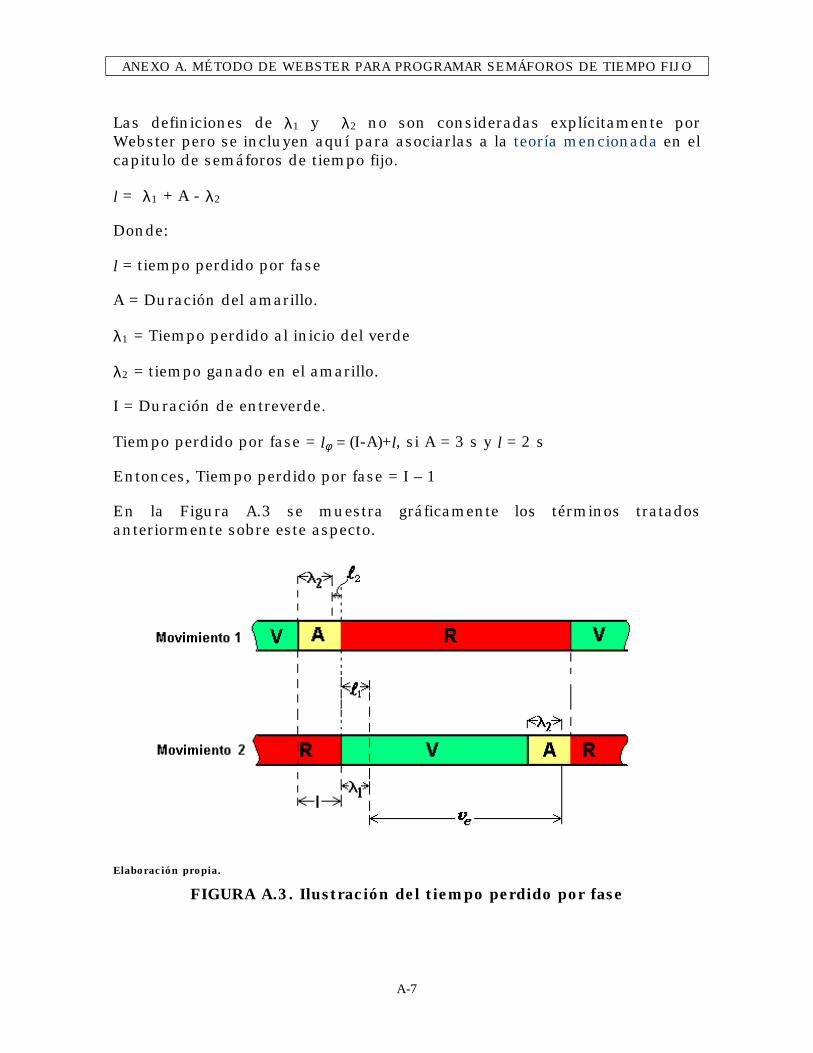
ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-7
Las definiciones de λ1 y λ2 no son consideradas explícitamente por Webster pero se incluyen aquí para asociarlas a la teoría mencionada en el capitulo de semáforos de tiempo fijo.
l = λ1 + A - λ2
Donde:
l = tiempo perdido por fase
A = Duración del amarillo.
λ1 = Tiempo perdido al inicio del verde
λ2 = tiempo ganado en el amarillo.
I = Duración de entreverde.
Tiempo perdido por fase = lφ = (I-A)+l, si A = 3 s y l = 2 s
Entonces, Tiempo perdido por fase = I – 1
En la Figura A.3 se muestra gráficamente los términos tratados anteriormente sobre este aspecto.
Elaboración propia.
FIGURA A.3. Ilustración del tiempo perdido por fase

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-8
A.1.10 Demora. La demora promedio por vehículo en cualquier acceso simple de una intersección semaforizada está dada por la siguiente expresión:
( )( ) ( )
−+
−−=
xq
x
x
cd
12121
109 22
λλ
Donde:
c= duración del ciclo del semáforo [s]
λ= g/c = razón de verde efectivo
g= duración del verde efectivo [s]
q= flujo del acceso [veh/h]
s= flujo de saturación [veh. lig./h.v.] = 525w
x= grado de saturación = q/λs
D = demora total para cada acceso = dq
También:
( )( ) ( )
( ) ( )
( )
cicloporarribandovehículosdepromedionúmeroc
qM
MxforiginalFuenteTablacorrecciónC
xforiginalFuenteTablax
xB
xforiginalFuenteTablax
A
cq
BcAd
==
=−
=
−−=
−+=
,,)(4
)(312
,)(212
1
2
2
λ
λλ
λ
A.1.11 Tiempo de ciclo. Se obtiene la duración de ciclo con base en la del ciclo óptimo que minimiza, entre otras, la demora de todos los vehículos que utilizan la intersección (Cuando k vale 1,5).
demoraMinimizaY
LC
Y
kLC
o
o
−+=
−+=
1
5511
5
,
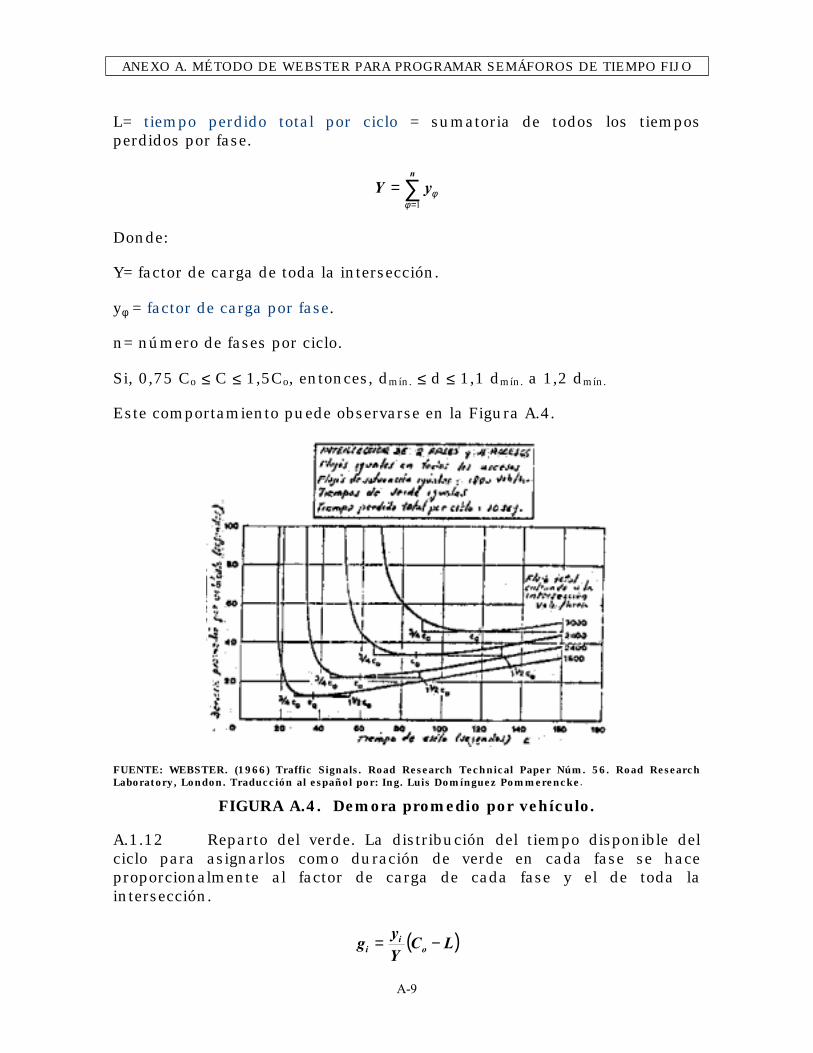
ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-9
L= tiempo perdido total por ciclo = sumatoria de todos los tiempos perdidos por fase.
∑=
=n
yY1φ
φ
Donde:
Y= factor de carga de toda la intersección.
yφ = factor de carga por fase.
n= número de fases por ciclo.
Si, 0,75 Co ≤ C ≤ 1,5Co, entonces, dmín. ≤ d ≤ 1,1 dmín. a 1,2 dmín.
Este comportamiento puede observarse en la Figura A.4.
FUENTE: WEBSTER. (1966) Traffic Signals. Road Research Technical Paper Núm. 56. Road Research Laboratory, London. Traducción al español por: Ing. Luis Domínguez Pommerencke.
FIGURA A.4. Demora promedio por vehículo.
A.1.12 Reparto del verde. La distribución del tiempo disponible del ciclo para asignarlos como duración de verde en cada fase se hace proporcionalmente al factor de carga de cada fase y el de toda la intersección.
( )LCY
yg o
ii −=
ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-10
Donde:
gi= Duración del verde efectivo de la fase i
yi = factor de carga de la fase i.
Y= factor de carga de toda la intersección.
Co= Ciclo óptimo
L= tiempo perdido total de la intersección.
A.1.13 Procedimiento general del método de diseño:
♦ Estimar qi y si
♦ Determinar yi= qi / si
♦ Calcular Y= Σ yi
♦ Estimar R = tiempo perdido por el todo rojo, por peatones, fases complementarias, despeje de intersección, etc.
♦ Calcular el ciclo óptimo donde L= n l + R
♦ Repartir el verde efectivo
♦ Calcular el tiempo de verde del semáforo con la expresión:
vi = gi + li – A
A.2 CAPACIDAD
Según Webster, 1966, la cantidad de tránsito que puede pasar a través de una intersección controlada con semáforos, desde un acceso dado, depende del tiempo de verde disponible para el tránsito y del máximo flujo de vehículos que pasan la línea de parada durante el período de verde.
A.3 FLUJO DE SATURACIÓN
Cuando el período de verde comienza, les toma cierto tiempo a los vehículos arrancar y acelerar a la velocidad de marcha normal, sin embargo, después de algunos segundos la cola es desalojada a un ritmo más o menos constante, llamado flujo de saturación se ilustra en la Figura A.2. Este concepto también se trató en el capítulo sobre semáforos de tiempo fijo.

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-11
El flujo de saturación es aquel flujo que se obtendría si hubiera una cola de vehículos constante y se diera el 100% de tiempo verde. Se expresa generalmente en vehículos por hora de luz verde. Se puede ver en la Figura A.2. que el flujo promedio es menor durante los primeros segundos (cuando los vehículos están acelerando para alcanzar la velocidad normal) y durante el período de ámbar (dado que algunos vehículos deciden parar y otros seguir adelante). Es conveniente remplazar los períodos de verde y ámbar por un período de “verde efectivo” en el que se supone que el flujo se mueve al ritmo de saturación, y un tiempo “perdido” durante el cual no hay flujo. Ese es un concepto útil porque la capacidad es entonces directamente proporcional al tiempo efectivo de verde. En términos gráficos esto significa sustituir la curva de la figura mencionada por un rectángulo de área igual, donde la altura del rectángulo es igual al flujo de saturación promedio. A la base del rectángulo se le llama tiempo efectivo de verde y la diferencia entre este y los tiempos de verde y ámbar combinados es el tiempo perdido.
Si:
G = período de verde y ámbar combinados (segundos)
g = tiempo efectivo de verde (segundos).
c = tiempo de ciclo (segundos)
λ = tiempo perdido (segundos)
s = flujo de saturación (vehículos por hora)
segundosGg
horaporvehiculosscgCapacidad
λ−=
=
El flujo de saturación y el tiempo perdido pueden medirse directamente en el camino.
A.4 EJEMPLO
Diseñar la programación de tiempos del control del tránsito con semáforos correspondiente a la intersección de la carrera 30 con calle 5 que se muestra en la Figura A.5.
A.4.1 Características generales. El sitio alrededor de la intersección es de condiciones promedias.
Los volúmenes horarios de diseño calculados con base en los aforos de tránsito y las proyecciones adecuadas se indican en la Tabla A.5.

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-12
TABLA A.5. Datos preliminares de la intersección. Acceso Sentido Ancho de
calzada (m)
Pendiente (%)
A (%)
B (%)
C (%)
Giro a derecha (veh/h)
Vehículos de frente (veh/h)
Giro a izquierda (veh/h)
Cra 30 Oeste-Este 7,2 0 98 2 0 60 450 130 Este-Oeste 3,6 0 98 2 0 120 180 27
Calle 5 Sur–Norte 10,80 +1 88 10 2 90 795 180 Norte-Sur 10,80 -1 88 10 2 179 900 113
A = automóviles. B = buses. C = camiones.
El percentil 85 de las velocidades a flujo libre sin obstrucciones se presentan en la Tabla A.6.
Elaboración propia.
FIGURA A.5. Intersección de la carrera 30 con calle 5
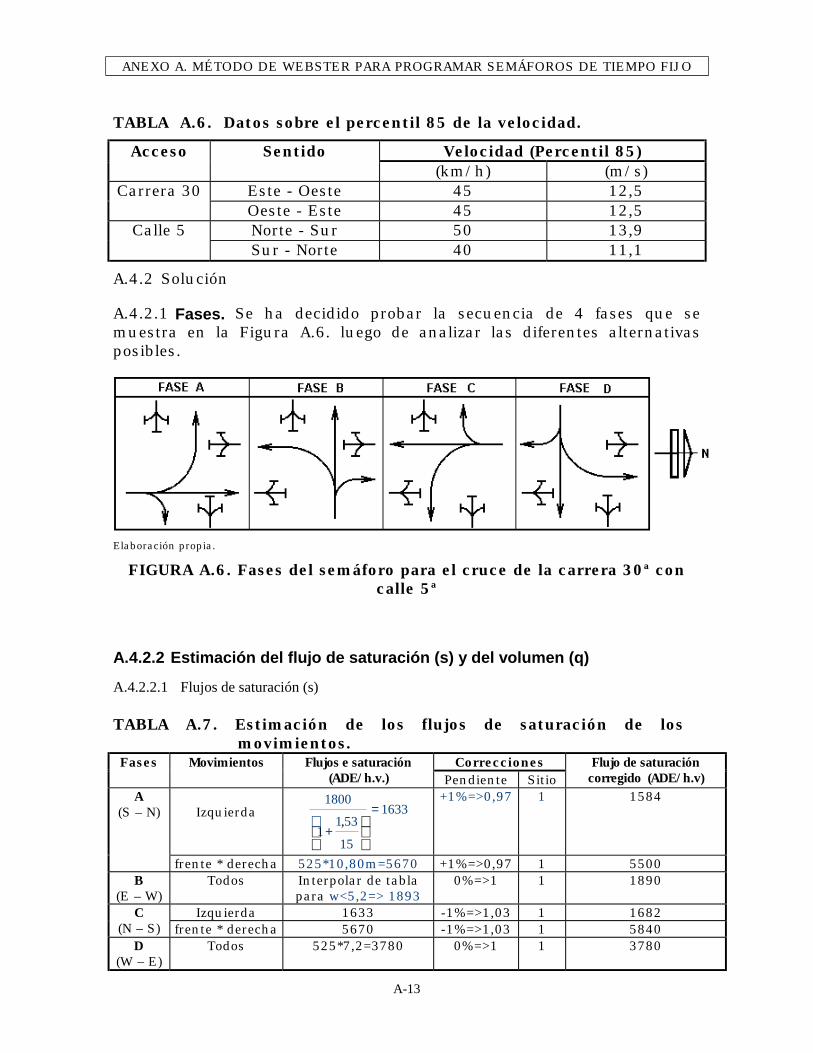
ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-13
TABLA A.6. Datos sobre el percentil 85 de la velocidad.
Velocidad (Percentil 85) Acceso Sentido (km/h) (m/s)
Este - Oeste 45 12,5 Carrera 30 Oeste - Este 45 12,5 Norte - Sur 50 13,9 Calle 5 Sur - Norte 40 11,1
A.4.2 Solución
A.4.2.1 Fases. Se ha decidido probar la secuencia de 4 fases que se muestra en la Figura A.6. luego de analizar las diferentes alternativas posibles.
Elaboración propia.
FIGURA A.6. Fases del semáforo para el cruce de la carrera 30ª con calle 5ª
A.4.2.2 Estimación del flujo de saturación (s) y del volumen (q)
A.4.2.2.1 Flujos de saturación (s) TABLA A.7. Estimación de los flujos de saturación de los
movimientos. Correcciones Fases Movimientos Flujos e saturación
(ADE/h.v.) Pendiente Sitio Flujo de saturación corregido (ADE/h.v)
Izquierda 1633
15
53,11
1800=
+
+1%=>0,97 1 1584 A (S – N)
frente * derecha 525*10,80m=5670 +1%=>0,97 1 5500 B
(E – W) Todos Interpolar de tabla
para w<5,2=> 1893 0%=>1 1 1890
Izquierda 1633 -1%=>1,03 1 1682 C (N – S) frente * derecha 5670 -1%=>1,03 1 5840
D (W – E)
Todos 525*7,2=3780 0%=>1 1 3780

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-14
ADE/hv = Automóviles directos equivalentes /hora de verde
A.4.2.2.2 Determinación de flujos (q). Para cada volumen en cada fase se consideran los efectos por el giro a derecha, la composición vehicular en ellos y en el giro a izquierda.
ACCESO SUR-NORTE
FIGURA A.7. Distribución de volúmenes en el acceso sur – norte.
Á Corrección por giros a derecha:
295 + 295 + 205 + [ 90 – (0,10 * 295) ] * 1,25 + (0,10 * 295) = 900,13 veh/h
Á Corrección por composición vehicular:
900,13 veh/h (0,88 * 1,0 + 0,10 * 2,25 v.l./bus + 0,02 * 2,5 v.l./camión) = 1039,65 ADE/h
Á Corrección por composición vehicular en el giro a izquierda:
180 veh/h * ( 0,88*1,0v.l./v.l.+0,10*2,25vl/bus+0,02*2,5vl/camión) = 207,9 ADE/h
ACCESO ESTE – OESTE
FIGURA A.8. Distribución de volúmenes en el acceso este – oeste.

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-15
Á Corrección por giros a derecha:
180 + 27 + [ 120 – (0,10 * 327)] * 1,25 + (0,10 * 327) = 349 veh/h
Á Corrección por composición vehicular en todos los movimientos:
349 veh/h (0,98 * 1,0vl/vl + 0,02 * 2,25 v.l./bus + 0 * 2,5 v.l./camión) = 357,73 ADE/h
ACCESO NORTE – SUR
FIGURA A.9. Distribución de volúmenes en el acceso norte – sur.
Á Corrección por giros a derecha:
360 + 359 + 181 + [ 179 – (0,10 * 360) ] * 1,25 + (0,10 * 360) = 1115 veh/h
Á Corrección por composición vehicular en movimientos a derecha y de frente:
1115 veh/h (0,88 + 0,225 + 0,05) = 1287,8 ADE/h
Á Corrección por composición vehicular en el giro a izquierda:
113veh/h ( 0,88 + 0,225 + 0,05)= 130,5 ADE/h
ACESO OESTE – ESTE
FIGURA A.10. Distribución de volúmenes en el acceso oeste– este.

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-16
Á Corrección por giros a derecha:
190 + 130 + 260 + [ 60 – (0,10 * 320)] * 1,25 + (0,10 * 320) = 647 veh/h
Á Corrección por composición vehicular en todos los movimientos:
647 veh/h (0,98 * 1,0 vl/vl + 0,02 * 2,25 v.l./bus + 0 * 2,5 v.l./camión) = 663,2 ADE/h
A.4.2.3 Determinación del factor de carga (Y) TABLA A.8. Factores de carga de los movimientos y de la intersección.
Fases Movimientos q (ADE/h) s (ADE/hv) y Izquierda 208 1584 0,13 A
(S – N) Frente * derecha 1040 5500 0,19 B
(E – W) Todos 358 1890 0,19
Izquierda 131 1682 0,08 C (N – S) Frente * derecha 1288 5840 0,22
D (W – E)
Todos 663 3780 0,18
Factor de carga de la intersección Y=0,78
A.4.2.4 Estimación del tiempo perdido total (L). Este aparte se tratará diferente a lo que propone Webster para considerar algunas nuevas definiciones como el tiempo perdido al inicio del verde y ganado en el amarillo, así como el cálculo del amarillo y del todo rojo.
( )∑∑==
−+==4
121
4
1 φφ
φφ λλIL λ
Donde:
L = tiempo perdido de toda la intersección
amarilloelenganadotiempoverdedelarranqueelenperdidotiempo
fasecadaenperdidotiempo
==
=
2
1
λλ
φφλ
I = AM + RR
Donde:

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-17
I = entreverde de cada fase
AM = duración del amarillo
RR = duración del todo rojo.
1
1
22
+
+−+
=
++=
i
i
i
ii
vd
vld
RR
gpdvTRAM
Donde:
TR = Tiempo de reacción = 1 s
v = velocidad de la corriente vehicular que usaría el amarillo en m/s
d = deceleración de los vehículos al frenar en condiciones cómodas = 2,5 m/s2
g = aceleración de la gravedad = 9,8 m/s2
p = pendiente longitudinal del acceso en tanto por uno
di = Distancia desde la línea de detención del movimiento que pierde el derecho de paso (i) hasta el punto de conflicto con el movimiento que gana el derecho de paso (i+1).
li = longitud del vehículo del movimiento que pierde el derecho de paso (i).
vi = velocidad de la corriente vehicular del movimiento que pierde el derecho de paso (i).
di+1 = Distancia desde la línea de detención del movimiento que gana el derecho de paso (i+1) hasta el punto de conflicto con el movimiento que pierde el derecho de paso (i).
vi+1 = velocidad de la corriente vehicular del movimiento que gana el derecho de paso (i+1).
A.4.2.4.1 Fase A: Acceso Sur – Norte
( )sRR
sAM
03,15,12
8,11,1149
1,301,0*8,9*25,2*2
1,111
=−+=
=+
+=
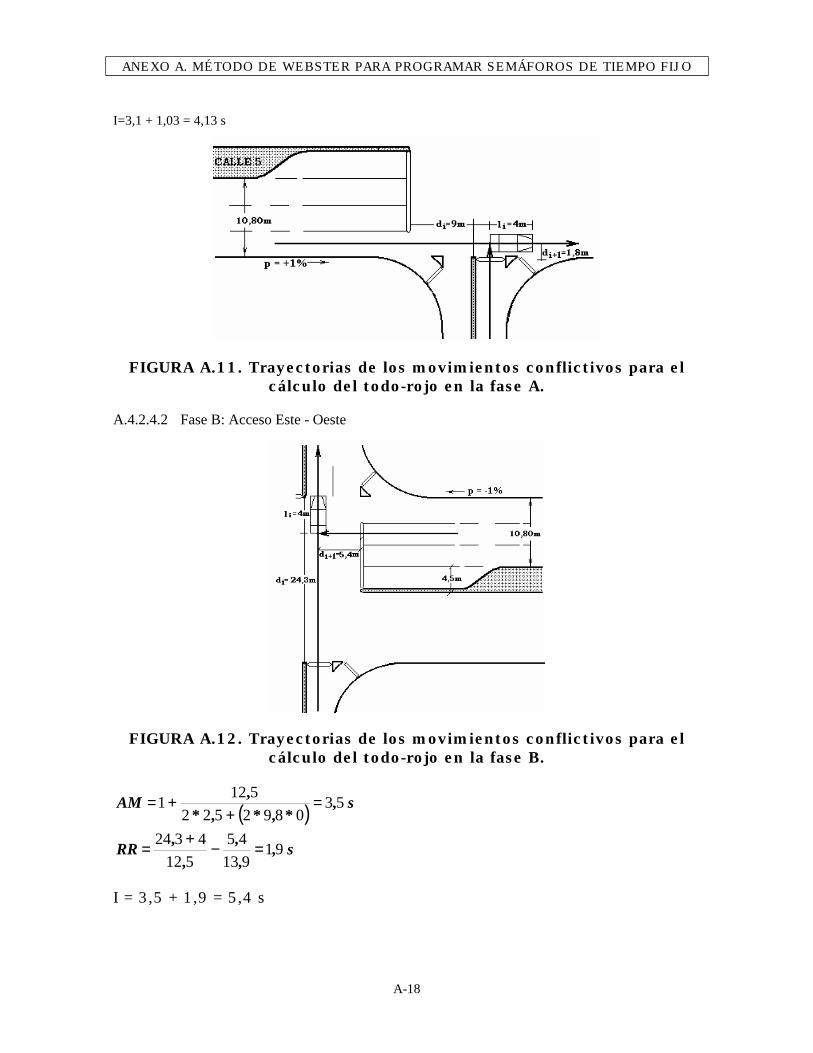
ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-18
I=3,1 + 1,03 = 4,13 s
FIGURA A.11. Trayectorias de los movimientos conflictivos para el cálculo del todo-rojo en la fase A.
A.4.2.4.2 Fase B: Acceso Este - Oeste
FIGURA A.12. Trayectorias de los movimientos conflictivos para el cálculo del todo-rojo en la fase B.
( )sRR
sAM
9191345
5124324
530892522
5121
,,,
,,
,*,*,*
,
=−+=
=+
+=
I = 3,5 + 1,9 = 5,4 s

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-19
A.4.2.4.3 Fase C: Acceso Norte - Sur
FIGURA A.13. Trayectorias de los movimientos conflictivos para el cálculo del todo-rojo en la fase C.
( )[ ]sRR
sAM
11512
81913
4813
93010892522
9131
,,
,,
,
,,*,*,*
,
=−+=
=−+
+=
I = 3,9 + 1,1 = 5 s
A.4.2.4.4 Fase D: Acceso Oeste - Este
FIGURA A.14. Trayectorias de los movimientos conflictivos para el cálculo del todo-rojo en la fase D.

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-20
[ ]sRR
sAM
8111145
5124324
530892522
5121
,,
,,
,
,*,*,*
,
=−+=
=+
+=
I = 3,5 + 1,8 = 5,3 s
TABLA A.9. Entreverde y tiempo perdido de las fases.
AM RR I λλλλ1 λλλλ2 λλλλφφφφ = I+λλλλ1-λλλλ2 (s) FASE (s) (s) (s) (s) (s) Final Aproximado
A 3,1 1,03 4 3,2 1,93 5,4 5 B 3,5 1,9 6 3,6 1,71 7,6 8 C 3,9 1,1 5 2,6 1,93 5,7 6 D 3,5 1,8 6 3,6 1,71 7,5 8
L = 27
A.4.2.5 Cálculo del ciclo óptimo (Co)
sY
LCo 82067801
527511
551 ,,
*,*, =−
+=−
+=
El intervalo de duración del ciclo en el cual las demoras no se incrementan más del 10% respecto a la correspondiente al ciclo óptimo es de 0,75 Co hasta 1,5 Co, es decir:
[0,75*206,8; 1,5*206,8] = [155; 311]
La duración del ciclo óptimo supera el máximo permitido de 120 segundos. Deben hacerse mejoramientos en la intersección de distinta índole para reducirlo, o sea, modificaciones geométricas como en el ancho de la calzada, radios de giro, pendientes longitudinales, etc. o cambios en la demanda de tránsito como desviación del mismo por rutas alternas de menor grado de ocupación, desestimular el uso del automóvil y/o promover el de transporte público.
Con el propósito de continuar con el ejercicio académico se asumirá como duración de ciclo 120 segundos, conscientes que en esta condición se presentará en algunos movimientos la cola excedente.

ANEXO A. MÉTODO DE WEBSTER PARA PROGRAMAR SEMÁFOROS DE TIEMPO FIJO
A-21
A.4.2.6 Reparto del ciclo
( )
sg
sg
sg
sg
L)(CYy
g
D
C
B
A
o
2193780180
2693780220
2393780190
2327120780190
==
==
==
=−=
−=
,,,,,,,,
φφ
A.4.2.7 Verde del semáforo (vφφφφ)
v = g + λ - I
vA = 23 + 5 –4 =24 s
vB = 23 + 8 – 6 = 25 s
vC = 26 + 6 – 5 = 27 s
vD = 21 + 8 – 6 = 23 s
FIGURA A. 15. Esquema de la programación de tiempos del semáforo.

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-1
B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
Este método para programar semáforos de tiempo fijo está basado en el documento Traffic Signals: Capacity and Timing Analysis cuyo autor es R. Akcelik de la Australian Road Research Board publicado en 1981, además, se han hecho algunas adaptaciones principalmente en el procedimiento de definición de los flujos de saturación, cálculo de la duración de amarillo, estimación del tiempo perdido al inicio del verde o al arranque (λ1) y tiempo ganado al final del verde o en el amarillo (λ2). Además, se ha querido hacer comentarios y aportes que consideran las condiciones locales que pueden ser de aplicación nacional.
El método es muy flexible ya que al analizar los movimientos vehículares y peatonales en forma individual permite programar los tiempos del semáforo considerando grupos de ellos o aisladamente dando la posibilidad de cubrir una gran variedad de tipos de intersecciones, desde las más sencillas hasta las más complejas pero en consecuencia debe analizarse el equipo necesario para poder ser implementados los resultados del diseño. De esta manera se puede solucionar un problema que se presenta al diseñar las fases de las intersecciones de manera rígida al no considerar dentro de sí los movimientos traslapados ya sea por falta de capacidad de los controladores o por limitantes en las metodologías de programación de semáforos de tiempo fijo.
El procedimiento resumido del método se presenta a continuación y posteriormente se desarrollará un ejemplo en el cual se podrá conocer la aplicación del mismo mencionando las partes que han sido adaptadas o modificadas que se alejan del método original pero que tratan de ser equivalentes técnicamente y compatibles con las condiciones locales.
B.1 DATOS La información con la que hay que contar para desarrollar el procedimiento es la siguiente:
a) Determinar los movimientos vehiculares y peatonales que se permiten en la intersección con base en el esquema correspondiente, estudios de tránsito, observaciones de campo, diseño o planificación de la intersección. Determinar las fases y la secuencia apropiada.
b) Diseño del tiempo de entreverde (I [segundos]), con base en el cálculo del amarillo (AM), todo-rojo(RR) o rojo-amarillo (RA), si es el caso.

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-2
c) Especificación de la duración del verde mínimo (vmín [segundos]) vehicular y peatonal de cada movimiento.
d) Determinar la tasa de flujo de llegada o volumen horario de diseño (q[veh/h])
e) Estimación de la tasa de flujo de saturación (s[veh/h.v.]).
f) Cálculo del tiempo perdido de los movimientos (l[segundos]).
g) Obtención del tiempo de verde efectivo mínimo (ve.mín[segundos]).
h) Especificación de los grados de saturación práctico para los movimientos (xp) y de la intersección (Xp).
B.2 IDENTIFICACIÓN DE MOVIMIENTOS CRÍTICOS De acuerdo a la consideración que se haya hecho sobre los movimientos y las fases, se halla mediante los siguientes pasos los movimientos que resultan ser los que controlan o determinan la necesidad de tiempos en cada fase.
a) Determinación de los tiempos necesarios de los movimientos (t). Uso de la tabla para la búsqueda de movimientos críticos.
b) Preparación de un diagrama de búsqueda de movimientos críticos.
c) Consideración de los movimientos no-traslapados: Determinar los movimientos representativos y reducir el diagrama de búsqueda de movimientos críticos.
d) Consideración de los movimientos traslapados: calcular el tiempo total necesario de los movimientos (T), para cada combinación posible de movimientos que recorran todas las fases (ruta). Los movimientos críticos son aquellos que arrojan el mayor valor de T.
B.3 CÁLCULOS PARA LA CAPACIDAD Y PROGRAMACIÓN DE TIEMPOS DEL SEMÁFORO a) Cálculo para toda la intersección del tiempo perdido, factor de carga y
razón de verde efectivo (L, Y, U) como la sumatoria de los parámetros correspondientes de los movimientos críticos seleccionados (l, y, u).
b) Cálculo de las duraciones de ciclo práctico y óptimo (Cp, Co).
c) Selección de una duración de ciclo (C) entre Cp y Co (que sea C ≤ Cmáx, donde Cmáx es la duración de ciclo máximo especificado).
ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-3
B.4 REVISIÓN Y EVALUACIÓN DE LA PROGRAMACIÓN
a) Revisión con la duración de ciclo escogida la validez de los movimientos críticos.
b) Cálculo de los tiempos de verde del semáforo (v). Diagramas de programación de tiempos de semáforos.
c) Cálculo de los grados de saturación resultante de los movimientos (x), y revisar que x ≤ xp para todos los movimientos.
B.5 RELACIONES FUNDAMENTALES
De acuerdo a GIBSON, 1988 y a como se describió en el Capítulo 5.
• Flujo de saturación = s[veh/h.v.] = 1 / h
Donde:
h = intervalo de saturación [segundos/vehículo]
• verde efectivo = ve [segundos] = v - λ1 + λ2,
Donde:
λ1 = tiempo perdido al inicio del verde [segundos].
λ2= tiempo ganado al final del verde o en el amarillo [segundos].
• rojo efectivo = re[segundos] = c - ve
Donde:
c = duración del ciclo [segundos].
• Tiempo perdido de un movimiento = ! [segundos] = I + λ1 - λ2
• v + I = ve + !"
) + v(= )I + (v= c e
m
1=
m
1=φ
φφ
φ
!∑∑
Donde:
c = duración del ciclo [segundos].
ø = 1, 2, 3,.....m = fases del semáforo.
v = duración del verde del movimiento [segundos].
I = duración del entreverde [segundos]. ! = tiempo perdido del movimiento[segundos].
Según AKCELIC, 1981.
• Flujo de saturación = s[veh/h.v.] = sb[ADE/h.v.] * fk

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-4
Donde: fk = fa * fp / fc = factor de equivalencia por todo tipo de correcciones.
fa = factor por ancho de carril.
fp = factor por pendiente longitudinal del carril.
fc = factor por composición del tránsito y tipo de maniobra.
En el Capítulo 5 se trató con mas detalle lo planteado por BRANSTON y VAN SUYLEN, 1978, sugerido por GIBSON, 1988 sobre el flujo de saturación y que a continuación se repasa.
• Estimador del flujo de saturación básico ( bs ) [ADE/h.v.]
( )
( )∑
∑∑
=
= =
−
+=
2
2
11
1 132
ˆ N
jjsj
N
j
m
iijiji
b
tt
nnf
s
Donde :
j = 1,2,....N2 = ciclos observados
N2 = Número de ciclos que tienen datos del 2º período.
i = 1,2,.....m = tipos de vehículo.
fi = Factor de equivalencia por tipo de vehículo (no por maniobra, ni pendiente, etc.) [ADE/s]
n2ij = Número de vehículos tipo i en el 2º período del ciclo j.
n3ij = Número de vehículos tipo i en el 3º período del ciclo j.
tsj = tiempo de saturación (desde inicio del verde hasta último vehículo en cola) en el ciclo j [segundos].
t1j = duración del 1er período para el ciclo j [segundos].
• Estimador del tiempo perdido al inicio del verde (λ1)[segundos]
S * N
] n * f [
N
t
= b1
1iji
m
1=i
N
1=j
1
1j
N
1=j1
11
-ˆ
ˆ∑∑∑
λ
Donde:
j = 1,2,....N1 = ciclos observados
N1 = Número de ciclos que tienen datos del 1er período.
n1ij = Número de vehículos tipo i en el 1er período del ciclo j
t3j = duración del 3er período para el ciclo j [segundos].

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-5
• Estimador del tiempo ganado al final del verde o en el amarillo (λ2) [segundos].
N
t=
3
3j
N
1=j2
3
∑λ
Donde:
j = 1,2,....N3 = ciclos observados
N3 = Número de ciclos que tienen datos del 3er período.
Capacidad y grado de saturación. Según AKCELIC, 1981. La capacidad de un movimiento vehicular (Q) esta dada con base en su valor del flujo de saturación (S) expresada en términos de cada ciclo del semáforo así:
cv
sQ e= [ADE/h.v.] en cada ciclo.
donde :
efectivoverdederazóncv
u e=
El grado de saturación de un movimiento vehicular (x), relaciona la demanda de tránsito solicitada y la oferta de capacidad entregada en el acceso o carril del movimiento considerado, es decir, el flujo de llegada (q [veh/h]) y la capacidad de tránsito (Q [veh/h]).
efectivoverde de razóncarga de factor =
uy = x
flujo de razón o carga de factor =y = sq
: dondecvsq
vc*
sq =
cv* s
q = Qq = x
eee=
Para proveer capacidad adecuada a un movimiento, o sea, que la demanda sea satisfecha se deben cumplir alguna de las siguientes condiciones:
• q < Q, es decir, que x < 1
Esta desigualdad es mayor cuando se aumenta la capacidad (Q) lo cual se logra suministrando más razón de verde efectivo y se obtendría un

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-6
grado de saturación menor. Pero esta condición se logra a expensas del desfavorecimiento de los movimientos que no tienen derecho de pasodurante esta misma fase. También es posible aumentar la desigualdad disminuyendo el flujo de llegada (q) desviando o eliminando parte del tránsito antes de llegar al movimiento en cuestión aplicando medidas de regulación de la demanda.
• y < u, es decir, s ve > q c
Por otro lado, se puede establecer con anterioridad al diseño el grado de saturación de cada movimiento para adjudicarle su calidad de funcionamiento obteniendo en consecuencia un verde adecuado; el grado de saturación seleccionado de esta manera se denomina práctico (xp).
pp x
yu
xyu
uyx
=
=⇒=
donde:
up = razón de verde efectivo práctico obtenido en función de un grado de saturación práctico preestablecido (xp).
λλ +=+=
∗=⇒=
cuvfasepormovimientodelnecesarioTiempo
cuvcv
u
pe
pee
p
La condición en la cual se logre satisfacer para todos los movimientos de la intersección que la oferta sea mayor que la demanda, es la condición de "capacidad de la intersección". Tales movimientos representativos de cada fase son los críticos para los cuales se lograría mantener que:
Donde:
∑=cos.crítimovuU = razón de tiempo de verde efectivo de la intersección obtenida
de los movimientos críticos.
∑=cos.crítimovyY = factor de carga de la intersección obtenida de los movimientos
críticos.
Por otro lado:
∑=cos.crítimov
L λ = Tiempo perdido de la intersección, obtenido de los
movimientos
y>u osmov.críticosmov.crític
∑∑

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-7
Entonces, el grado de saturación de la intersección (X) será:
L - cc* Y =
UY = X
En el método secuencial donde el grado de saturación de cada movimiento (x) es diferente, se toma como grado de saturación de la intersección (X) el mayor grado de los movimientos.
B.6 EJEMPLO Se tiene la intersección de la Figura B.1 que representa un cruce en T con las dimensiones en metros, pendientes, distribución de carriles vehiculares y cruces peatonales correspondientes que requiere la programación de tiempos para el control del tránsito con semáforos de tiempo fijo y funcionamiento aislados de las demás intersecciones.
B.6.1 Datos B.6.1.1 Esquema de la intersección. La configuración física de la intersección que se trata en este ejemplo está ilustrada en la Figura B.1. Teniendo en consideración las posibilidades geométricas de la intersección (número de carriles y maniobras posibles de realizar), las necesidades de giros para satisfacer la demanda de viajes de la zona de influencia de la intersección, las posibilidades de control del tránsito mediante los semáforos, restricciones económicas en la adquisición de equipo (caras, postes, ménsulas, controladores, detectores, etc.) se determinan los movimientos (Vehiculares y peatonales) que se permitirán circular en la intersección. Para este caso se presentan los movimientos posibles en la Figura B.2 y en la Figura B.3 se muestran los mismos movimientos que por restricción de adquisición de caras de semáforos se han decidido que el movimiento vehicular número 3 y 4 tendrán derecho de paso simultáneamente.
c
v=
cL c -=
cicloóninterseccila de verde de tiempo=U
eosmov.crÍtic
∑

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-8
Elaboración propia.
FIGURA B.1. Esquema de la intersección ejemplo
Elaboración propia.
FIGURA B.2. Movimientos de la intersección
Elaboración propia.
FIGURA B.3. Fases del semáforo
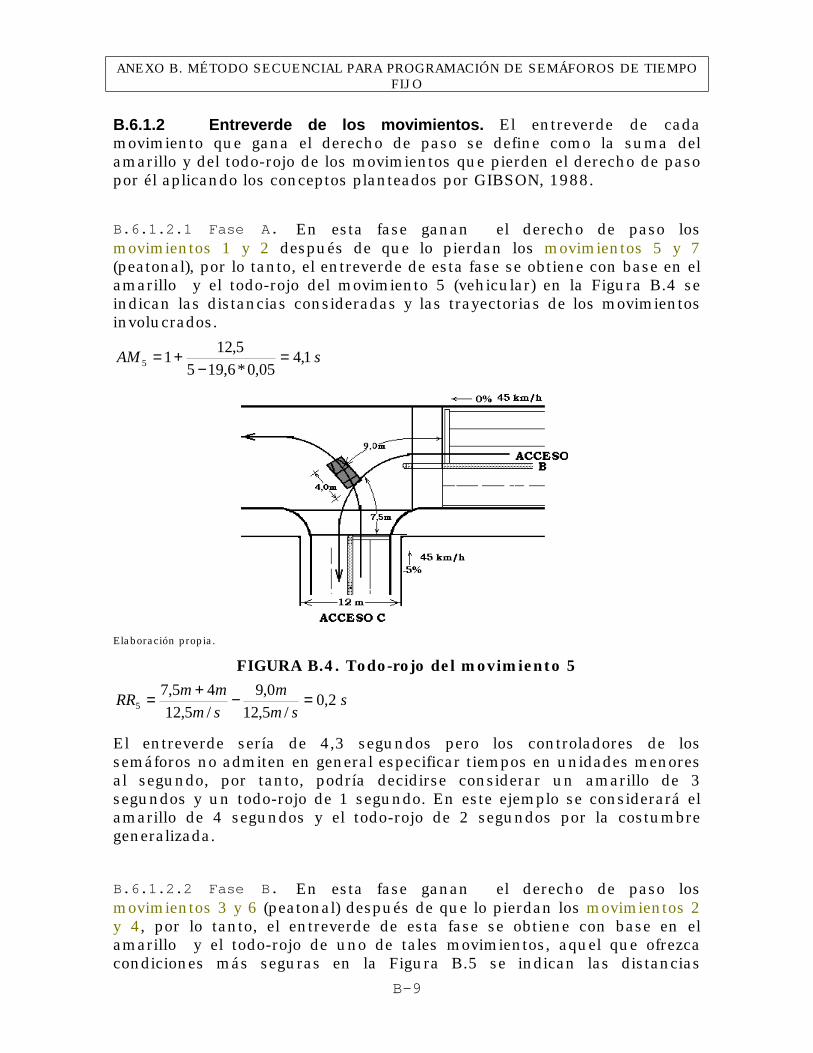
ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-9
B.6.1.2 Entreverde de los movimientos. El entreverde de cada movimiento que gana el derecho de paso se define como la suma del amarillo y del todo-rojo de los movimientos que pierden el derecho de paso por él aplicando los conceptos planteados por GIBSON, 1988.
B.6.1.2.1 Fase A. En esta fase ganan el derecho de paso los movimientos 1 y 2 después de que lo pierdan los movimientos 5 y 7 (peatonal), por lo tanto, el entreverde de esta fase se obtiene con base en el amarillo y el todo-rojo del movimiento 5 (vehicular) en la Figura B.4 se indican las distancias consideradas y las trayectorias de los movimientos involucrados.
sAM 1,405,0*6,195
5,1215 =−
+=
Elaboración propia.
FIGURA B.4. Todo-rojo del movimiento 5
ssm
msmmmRR 2,0
/5,120,9
/5,1245,7
5 =−+=
El entreverde sería de 4,3 segundos pero los controladores de los semáforos no admiten en general especificar tiempos en unidades menores al segundo, por tanto, podría decidirse considerar un amarillo de 3 segundos y un todo-rojo de 1 segundo. En este ejemplo se considerará el amarillo de 4 segundos y el todo-rojo de 2 segundos por la costumbre generalizada.
B.6.1.2.2 Fase B. En esta fase ganan el derecho de paso los movimientos 3 y 6 (peatonal) después de que lo pierdan los movimientos 2 y 4, por lo tanto, el entreverde de esta fase se obtiene con base en el amarillo y el todo-rojo de uno de tales movimientos, aquel que ofrezca condiciones más seguras en la Figura B.5 se indican las distancias

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-10
consideradas y las trayectorias de los movimientos involucrados.
Amarillo y todo –rojo del movimiento 2:
sAM 5,3055,1212 =
++=
Elaboración propia.
FIGURA B.5. Todo-rojo del movimiento 2
ssm
msmmmRR 56,0
/5,125,4
/5,1245,7
2 =−+=
Amarillo y todo-rojo del movimiento 4:
En la Figura B.6 se indican las distancias consideradas y las trayectorias de los movimientos involucrados.
sAM 1,405,0*6,195
5,1214 =−
+=
Elaboración propia.
FIGURA B.6. Todo-rojo del movimiento 4

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-11
ssm
msmmmRR 44,0
/5,1214
/5,1245,4
4 −=−+=
El entreverde sería de 4,06 o 3,66 segundos pero los controladores de los semáforos no admiten generalmente especificar tiempos en unidades menores al segundo, por tanto, podría decidirse considerar un amarillo de 4 ó 3 segundos y un todo-rojo de 1 ó 2 segundos. En este ejemplo se considerará el amarillo de 3 segundos y el todo-rojo de 2 segundos para el movimiento 3 y de 4 segundos de amarillo y 2 de todo-rojo para el movimiento peatonal 6.
B.6.1.2.3 Fase C. En esta fase ganan el derecho de paso los movimientos 5 y 7 (peatonal) después de que lo pierdan los movimientos 1 y 3, por lo tanto, el entreverde de esta fase se obtiene con base en el amarillo y el todo-rojo de uno de tales movimientos, aquel que ofrezca condiciones más seguras, así:
sRR
sRR
sAM ó
56,05,125,4
5,1245,7
08,05,12
125,1249
5,3055,121
3
1
31
=−+=
=−+=
=+
+=
El entreverde sería de 3,58 ó 4,06 segundos, por tanto, podría decidirse considerar un amarillo de 4 segundos y un todo-rojo de 1 segundo. En este ejemplo se considerará el amarillo de 3 segundos y el todo-rojo de 2 segundos.
B.6.1.3 Verdes mínimos de los movimientos. De acuerdo a lo visto en el Capítulo 5 sobre semáforos de tiempo fijo y planteado por GIBSON, 1988, el verde mínimo para los movimientos vehiculares 1 a 5 es de 8 segundos y para los movimientos peatonales se calcula de la siguiente manera: Para el movimiento 6:
Á 1,1*w=1,1*12=13,2 m
Á 5+w/1,4=13,6 m
Entonces, el verde mínimo para el movimiento 6 es el máximo de los resultados anteriores, es decir, 14 segundos.
Para el movimiento 7:
Á 1,1*w=1,1*15=16,5 m

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-12
Á 5+w/1,4=15,7 m
Entonces, el verde mínimo para el movimiento 7 es el máximo de los resultados anteriores, es decir, 17 segundos.
En la Tabla B.1 Entreverdes y verdes mínimos de los movimientos se resume los resultados correspondientes al entreverde y verde mínimo de cada movimiento.
TABLA B.1. Entreverdes y verdes mínimos de los movimientos Movimiento que gana
el derecho de paso Fase Movimiento que pierde
el derecho de paso AMp RRp Ig Vmín
1 A 5 4 2 6 8 2 A 5 4 2 6 8 3 B 2,4 3 2 5 8 4 C 1,3 3 2 5 8 5 C 1,3 3 2 5 8 6 B 2,4 4 2 6 14 7 C 1,3 3 2 5 17
vmin = Duración del verde del semáforo mínimo. AMp = Duración de amarillo correspondiente al movimiento que pierde el derecho de paso. RRp = Duración del todo rojo correspondiente al movimiento que pierde el derecho de paso. Ig = Duración del entreverde del movimiento que gana el derecho de paso.
B.6.1.4 Datos sobre flujo de llegada. En la Tabla B.2 se presenta el flujo de vehículos por hora de cada movimiento obtenido de aforos y convenientemente proyectados para el año horizonte o de vida útil de funcionamiento de la intersección. B.6.1.5 Estimación de la tasa de flujo de saturación. Se definen los flujos de saturación apropiados provenientes de mediciones en el sitio si éste existe o de intersecciones compatibles con la del ejemplo. Aunque hay peatones en la intersección, se presume que estos tienen suficiente capacidad en el cruce peatonal correspondiente. Pueden tenerse en consideración los resultados de estudios hechos por GOMEZ Y OTROS, 1988, CAÑAS Y CARMONA, 1993, FORERO, 1999 y MARTÍNEZ, 1999, presentados todos en el Capítulo 5.
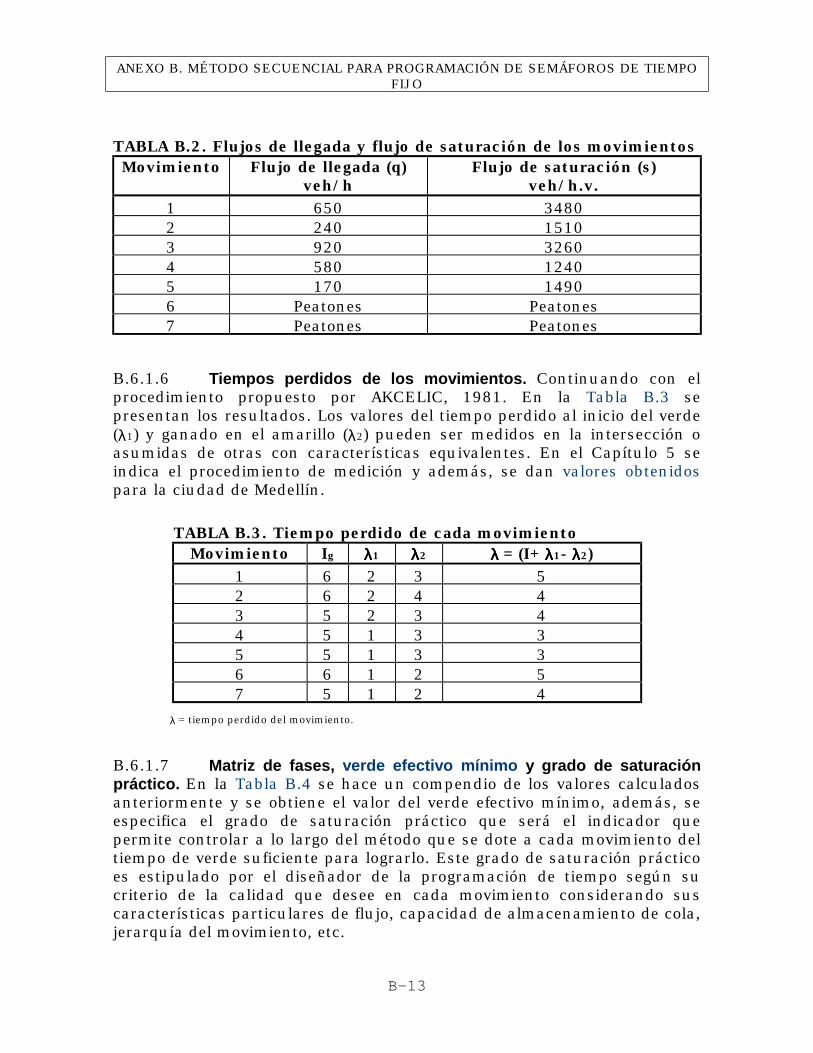
ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-13
TABLA B.2. Flujos de llegada y flujo de saturación de los movimientos Movimiento Flujo de llegada (q)
veh/h Flujo de saturación (s)
veh/h.v. 1 650 3480 2 240 1510 3 920 3260 4 580 1240 5 170 1490 6 Peatones Peatones 7 Peatones Peatones
B.6.1.6 Tiempos perdidos de los movimientos. Continuando con el procedimiento propuesto por AKCELIC, 1981. En la Tabla B.3 se presentan los resultados. Los valores del tiempo perdido al inicio del verde (λ1) y ganado en el amarillo (λ2) pueden ser medidos en la intersección o asumidas de otras con características equivalentes. En el Capítulo 5 se indica el procedimiento de medición y además, se dan valores obtenidos para la ciudad de Medellín.
TABLA B.3. Tiempo perdido de cada movimiento Movimiento Ig λλλλ1 λλλλ2 λ λ λ λ = (I+ λλλλ1- λλλλ2)
1 6 2 3 5 2 6 2 4 4 3 5 2 3 4 4 5 1 3 3 5 5 1 3 3 6 6 1 2 5 7 5 1 2 4
λ = tiempo perdido del movimiento.
B.6.1.7 Matriz de fases, verde efectivo mínimo y grado de saturación práctico. En la Tabla B.4 se hace un compendio de los valores calculados anteriormente y se obtiene el valor del verde efectivo mínimo, además, se especifica el grado de saturación práctico que será el indicador que permite controlar a lo largo del método que se dote a cada movimiento del tiempo de verde suficiente para lograrlo. Este grado de saturación práctico es estipulado por el diseñador de la programación de tiempo según su criterio de la calidad que desee en cada movimiento considerando sus características particulares de flujo, capacidad de almacenamiento de cola, jerarquía del movimiento, etc.
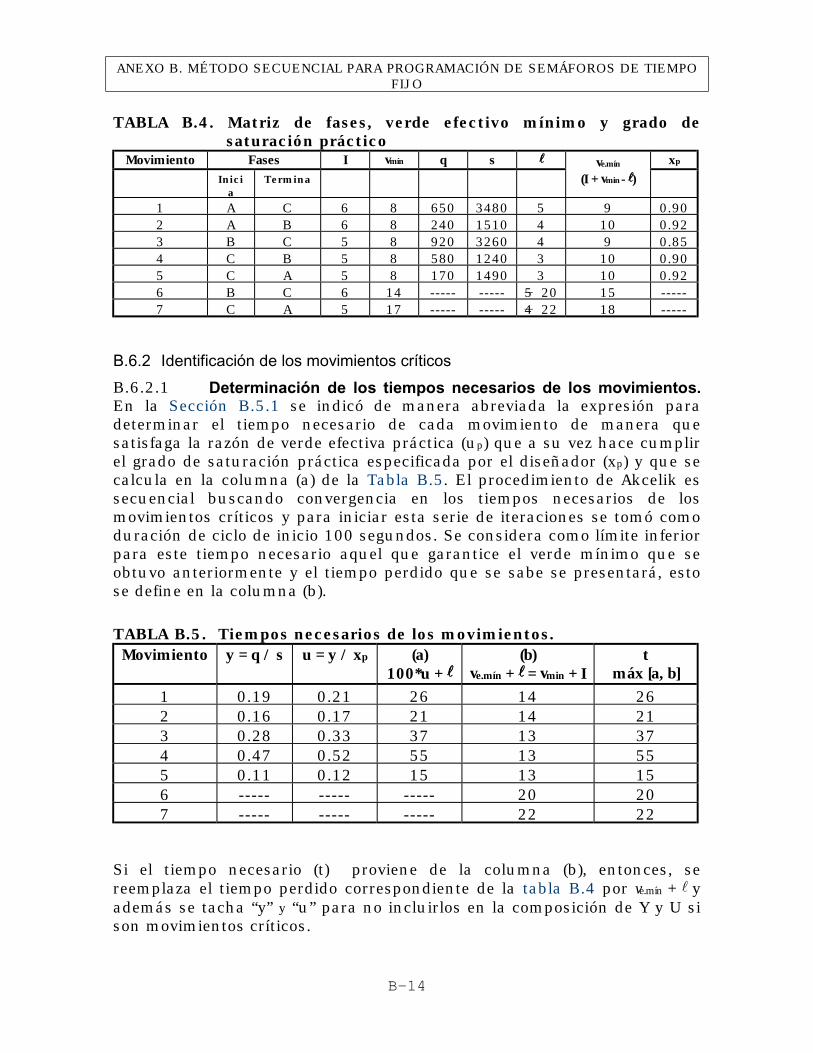
ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-14
TABLA B.4. Matriz de fases, verde efectivo mínimo y grado de saturación práctico
Movimiento Fases I vmín q s !!!!"""" xp Inici
a Termina
ve.mín (I + vmin - !!!!)
1 A C 6 8 650 3480 5 9 0.90 2 A B 6 8 240 1510 4 10 0.92 3 B C 5 8 920 3260 4 9 0.85 4 C B 5 8 580 1240 3 10 0.90 5 C A 5 8 170 1490 3 10 0.92 6 B C 6 14 ----- ----- 5 20 15 ----- 7 C A 5 17 ----- ----- 4 22 18 -----
B.6.2 Identificación de los movimientos críticos
B.6.2.1 Determinación de los tiempos necesarios de los movimientos. En la Sección B.5.1 se indicó de manera abreviada la expresión para determinar el tiempo necesario de cada movimiento de manera que satisfaga la razón de verde efectiva práctica (up) que a su vez hace cumplir el grado de saturación práctica especificada por el diseñador (xp) y que se calcula en la columna (a) de la Tabla B.5. El procedimiento de Akcelik es secuencial buscando convergencia en los tiempos necesarios de los movimientos críticos y para iniciar esta serie de iteraciones se tomó como duración de ciclo de inicio 100 segundos. Se considera como límite inferior para este tiempo necesario aquel que garantice el verde mínimo que se obtuvo anteriormente y el tiempo perdido que se sabe se presentará, esto se define en la columna (b).
TABLA B.5. Tiempos necesarios de los movimientos. Movimiento y = q / s u = y / xp (a)
100*u + !!!! (b)
ve.mín + !!!! = vmin + I t
máx [a, b] 1 0.19 0.21 26 14 26 2 0.16 0.17 21 14 21 3 0.28 0.33 37 13 37 4 0.47 0.52 55 13 55 5 0.11 0.12 15 13 15 6 ----- ----- ----- 20 20 7 ----- ----- ----- 22 22
Si el tiempo necesario (t) proviene de la columna (b), entonces, se reemplaza el tiempo perdido correspondiente de la tabla B.4 por ve.mín + ! y además se tacha “y” y “u” para no incluirlos en la composición de Y y U si son movimientos críticos.
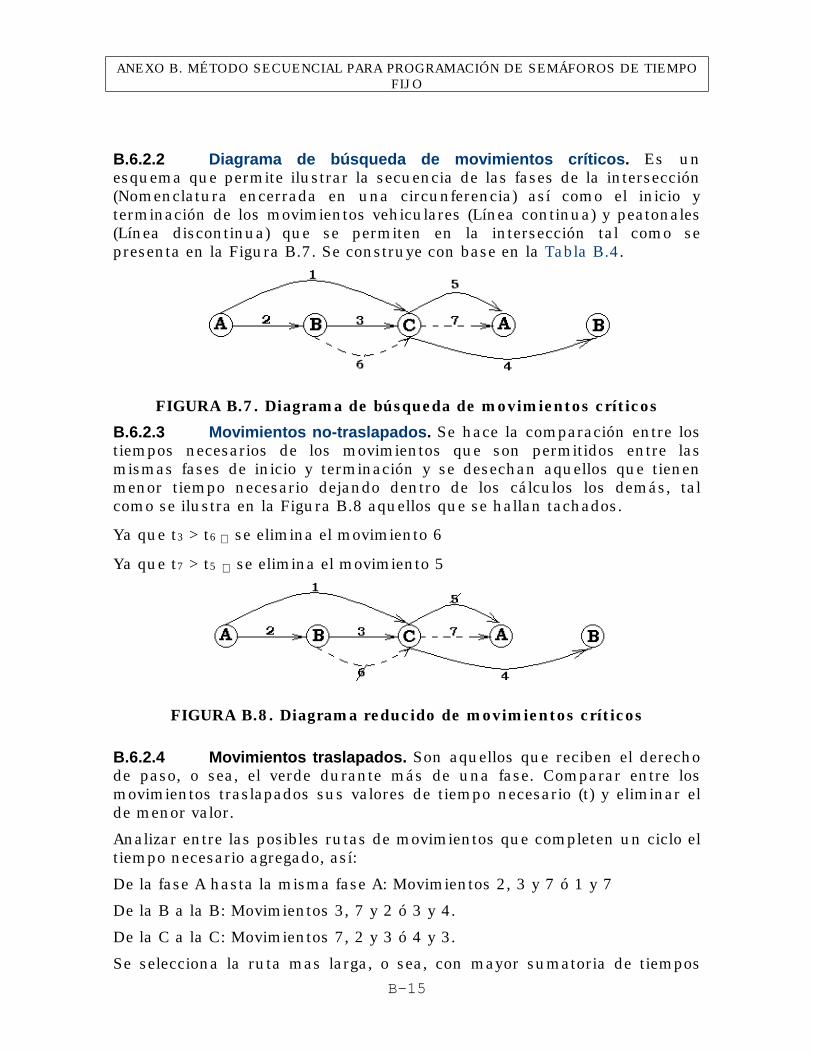
ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-15
B.6.2.2 Diagrama de búsqueda de movimientos críticos. Es un esquema que permite ilustrar la secuencia de las fases de la intersección (Nomenclatura encerrada en una circunferencia) así como el inicio y terminación de los movimientos vehiculares (Línea continua) y peatonales (Línea discontinua) que se permiten en la intersección tal como se presenta en la Figura B.7. Se construye con base en la Tabla B.4.
FIGURA B.7. Diagrama de búsqueda de movimientos críticos
B.6.2.3 Movimientos no-traslapados. Se hace la comparación entre los tiempos necesarios de los movimientos que son permitidos entre las mismas fases de inicio y terminación y se desechan aquellos que tienen menor tiempo necesario dejando dentro de los cálculos los demás, tal como se ilustra en la Figura B.8 aquellos que se hallan tachados. Ya que t3 > t6 ⇒ se elimina el movimiento 6
Ya que t7 > t5 ⇒ se elimina el movimiento 5
FIGURA B.8. Diagrama reducido de movimientos críticos
B.6.2.4 Movimientos traslapados. Son aquellos que reciben el derecho de paso, o sea, el verde durante más de una fase. Comparar entre los movimientos traslapados sus valores de tiempo necesario (t) y eliminar el de menor valor. Analizar entre las posibles rutas de movimientos que completen un ciclo el tiempo necesario agregado, así:
De la fase A hasta la misma fase A: Movimientos 2, 3 y 7 ó 1 y 7
De la B a la B: Movimientos 3, 7 y 2 ó 3 y 4.
De la C a la C: Movimientos 7, 2 y 3 ó 4 y 3.
Se selecciona la ruta mas larga, o sea, con mayor sumatoria de tiempos
ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-16
necesarios de los movimientos (T).
T1, 7 = t1 + t7 = 26 + 22 = 48 segundos
T2, 3,7 = 80 s
T3, 4 = 92 s
Por lo anterior, los movimientos críticos serán 3 y 4.
B.6.3 Cálculos para la capacidad y programación de tiempos del semáforo. B.6.3.1 Obtención de parámetros de la intersección tiempo perdido total (L), factor de carga total (Y) y razón de verde efectivo total. (U) L= λλλλ3 + λλλλ4 = 4 + 3 = 7 segundos
Y = y3 + y4 = 0,75
U= u3 + u4 = 0,85
B.6.3.2 Cálculo del tiempo de ciclo (Co y Cp). La duración del ciclo se obtiene seleccionándolo de intervalos de valor obtenidos con criterios de optimizar algún parámetro como la demora vehicular, detenciones, longitudes de cola, capacidades o combinación de estos (Co) y de un valor correspondiente al ciclo que satisface los grados de saturación práctico asumidos desde un principio por el diseñador llamado ciclo práctico (Cp).
CICLO ÓPTIMO:
P = Medida de desempeño = D + K H “De los movimientos críticos”
Donde:
D = Demora total
K = Penalización por detención
H = Número de detenciones
YLKCo −
++=1
641 ),(
Co = Duración del ciclo óptimo que minimiza P (s)
L = Tiempo perdido de la intersección (s)
Y = Factor de carga de la intersección
k = Parámetro de penalización por detención = K/100
k = 0,4 Para minimizar consumo de combustible (intersección con bajo flujo y velocidad alta)
k = 0,3 Para minimizar en forma aproximada: ∑críticomovim
colalong.
. (Para las

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-17
intersecciones críticas en período pico y con almacenamiento de colas escaso).
k = 0,2 Para minimizar costos (incluyendo valor del tiempo por demora)
k = 0,0 Para minimizar la demora vehicular.
Co : No tiene en cuenta smin. Es aproximada por lo anterior
Según un estudio realizado por WEBSTER (1966) la demora vehicular tiene una característica de poca variación de su valor cuanto la duración del ciclo oscila entre ¾ y 1½ del ciclo óptimo. En la Figura B.9 puede apreciarse este comportamiento.
No es válida para semáforos coordinados solo para semáforos aislados.
CICLO PRÁCTICO:
ULC p −
=1
Cp : Mínima duración de ciclo que asegura que todos los movimientos críticos tienen grado de saturación más bajos que los grados de saturación prácticos (Xp).
Cp : sirve para semáforos coordinados
FUENTE: WEBSTER. (1966). Traffic Signals. Road Research Technical Paper Núm. 56. Road Research Laboratory, London. Traducción al español por: Ing. Luis Dominguez Pommerencke. UNAM.
FIGURA B.9. Demora promedio por vehículo

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-18
B.6.3.3 Selección de la duración de ciclo (c). Para elegir el valor del ciclo se escoge uno que cumpla con todas las siguientes condiciones: Á cp < c < co
Á c < cmax = 120 segundos
Á 40 segundos = cmin < c
Á ¾co < c < 1½ co. Según el criterio de Webster ilustrado en la Figura B.9.
Para el ejemplo los valores del ciclo óptimo y práctico son:
sCo 2,6375,01
67*4,1 =−
+= Optimizar demora
sCo 8,6825,0
67*6,1 =+= Optimizar costos
sCo 4,7425,0
67*8,1 =+= Optimizar combustible
sCo 8,5425,0
67*1,1 =+= Optimizar colas
Se considerará el criterio que minimiza los costos, por lo tanto, el valor del ciclo óptimo será de 69 segundos.
sU
LC p 477,4685,01
71
≈=−
=−
=
Se escoge la duración de ciclo de manera que:
Á c< 120 s
Á c> 40 s
Á cp < c < co 47 s < c < 69 s
Á ¾co < c < 1½ co 52 s < c < 103,5 s
El valor de la duración de ciclo escogido es de 60 segundos.
B.6.4 Revisión y evaluación de la programación. B.6.4.1 Revisión con la duración de ciclo escogida. La secuencia del procedimiento se dio inicio con una duración de ciclo de 100 s, ahora se procede de manera similar con la duración de ciclo de 60 segundos escogida de los valores calculados para calcular los tiempos necesarios de los movimientos y posteriormente la ruta crítica. Lo anterior está contenido en la Tabla B.6.

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-19
TABLA B.6. Revisión de la programación con ciclo de 60 segundos. Movimientos 60*u + λλλλ vmin+ I t
1 18 14 18 2 14 14 14 3 24 13 24 4 34 13 34 5 10 13 13 6 20 20 7 22 22
T1, 7 = 18 + 22 = 40 s
T2, 3,7 = 60 s
T3, 4 = 58 s
La ruta seguida por los movimientos 3 y 4 ya no es la crítica, cambia a la ruta de los movimientos 2, 3 y 7 entonces se realiza otra iteración siguiendo el procedimiento a partir del paso que calcula los parámetros de la intersección (L, Y y U) para la nueva ruta crítica.
Parámetros de la intersección L = λ2 + λ 3 + λ 7 = 4 + 4 + 22 = 30 s
Y = 0,16 + 0,28 + 0 = 0,44
U = 0,17 + 0,33 + 0 = 0,50
Cálculo de Co y Cp
sCo 9644,01
630*6,1 ≈−
+=
sC p 6050,01
30 =−
=
Se escoge C:
60 s = cp < c < co = 96 s
72 s = ¾co < c < 1½co = 144 s
Entonces: 72 s < c < 96 s. El nuevo valor del ciclo para esta segunda iteración es de 75 segundos.

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-20
Revisión de movimientos críticos
TABLA B.7. Revisión de la programación con ciclo de 75 segundos. Movimientos 75*u + λλλλ vmin+ I t
1 21 14 21 2 17 14 17 3 29 13 29 4 42 13 42 5 12 13 13 6 20 20 7 22 22
Revisión de la ruta crítica: T1, 7 = 43
T2, 3,7 = 68
T3, 4 = 71
La ruta seguida por los movimientos 2, 3 y 7 ya no es la crítica, cambia a la ruta de los movimientos 3 y 4 entonces se realiza una nueva iteración siguiendo el procedimiento a partir del paso que calcula los parámetros de la intersección (L, Y y U) para la nueva ruta crítica.
Parámetros de la intersección L = λ 3 + λ4 = 7
Y3, 4 = 0,75
U3, 4 = 0,85
Cálculo de Co y Cp
sco 6975,01
67*6,1 =−
+=
scp 478501
7 =−
=,
cp = 47 s < c < co = 69 s
¾co < c < 1½ co 52 s < c < 103,5 s
El valor de C se selecciona del intervalo: 52 s < c < 69 s. Se toma c = 65 segundos.

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-21
Revisión movimientos críticos:
TABLA B.8. Revisión de la programación con ciclo de 65 segundos. Movimientos 65*u + λλλλ vmin+ I t
1 19 14 19 2 15 14 15 3 25 13 25 4 37 13 37 5 11 13 13 6 20 20 7 22 22
Revisión de la ruta crítica: T1, 7 = 41 s
T2, 3,7 = 62 s
T3, 4 = 62 s
La ruta crítica sigue siendo la seguida por los movimientos 3 y 4, por lo tanto, se conserva el valor de c = 65 s
B.6.4.2 Cálculo de los tiempos de verde del semáforo Tiempos de verde efectivo (Reparto del ciclo). Se inicia el reparto del tiempo disponible para el verde efectivo con los movimientos críticos 3 y 4 y entre ellos el que tenga ve min (si existe)
Movimiento 3: ve 3 = (c – L) u3/u = (65 – 7) 0,33/0,85 = 23 s
Movimiento 4: ve 4 = (c – L) u4/u = (65 – 7) 0,52/0,85 = 35 s
Se hace la verificación de que el reparto entre los movimientos de la ruta crítica se haya hecho completamente de la siguiente manera:
c – L = 65 – 7 = 58 s
ve 3 + ve 4 = 23 + 35 = 58 s, entonces, está bien hecho.
Reparto en los movimientos no-críticos: 1, 2, 5, 6 y 7:
Se inicia el reparto de verde para los movimientos no-críticos que comparten la misma fase que el movimiento crítico (3).
Ve 6 = (ve 3 + λ3) - λ6 = ( 23 + 4) – 5 = 22 s
El reparto de los demás movimientos no-críticos es más complicado, puede observarse que el movimiento crítico 4 se traslapa con los movimientos 7 y 2. Su tiempo deberá ser tratado como un subciclo donde:
c* = ve4 + λ4 = 35 + 3 = 38 s y luego distribuir este subciclo entre los movimientos que comparte fase, es decir, los movimientos 7 y 2.
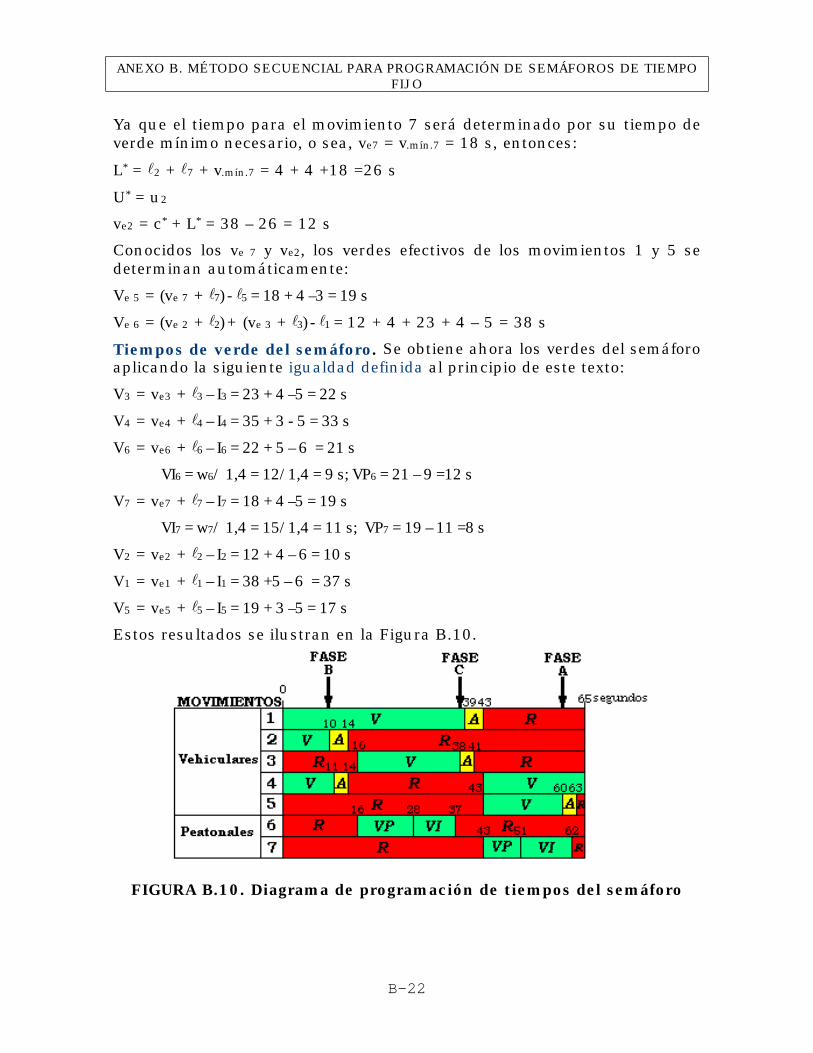
ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-22
Ya que el tiempo para el movimiento 7 será determinado por su tiempo de verde mínimo necesario, o sea, ve7 = v.mín.7 = 18 s, entonces:
L* = !2 + !7 + v.mín.7 = 4 + 4 +18 =26 s
U* = u2
ve2 = c* + L* = 38 – 26 = 12 s
Conocidos los ve 7 y ve2, los verdes efectivos de los movimientos 1 y 5 se determinan automáticamente:
Ve 5 = (ve 7 + !7) - !5 = 18 + 4 –3 = 19 s
Ve 6 = (ve 2 + !2) + (ve 3 + !3) - !1 = 12 + 4 + 23 + 4 – 5 = 38 s
Tiempos de verde del semáforo. Se obtiene ahora los verdes del semáforo aplicando la siguiente igualdad definida al principio de este texto:
V3 = ve3 + !3 – I3 = 23 + 4 –5 = 22 s
V4 = ve4 + !4 – I4 = 35 + 3 - 5 = 33 s
V6 = ve6 + !6 – I6 = 22 + 5 – 6 = 21 s
VI6 = w6/ 1,4 = 12/1,4 = 9 s; VP6 = 21 – 9 =12 s
V7 = ve7 + !7 – I7 = 18 + 4 –5 = 19 s
VI7 = w7/ 1,4 = 15/1,4 = 11 s; VP7 = 19 – 11 =8 s
V2 = ve2 + !2 – I2 = 12 + 4 – 6 = 10 s
V1 = ve1 + !1 – I1 = 38 +5 – 6 = 37 s
V5 = ve5 + !5 – I5 = 19 + 3 –5 = 17 s
Estos resultados se ilustran en la Figura B.10.
FIGURA B.10. Diagrama de programación de tiempos del semáforo

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-23
B.6.4.3 Grados de saturación resultantes de los movimientos TABLA B.9. Grados de saturación resultantes de los movimientos.
Movimiento Y ve x = y * c / ve xp 1 0.19 38 0.33 0.90 2 0.16 12 0.87 0.92 3 0.28 23 0.79 0.85 4 0.47 35 0.87 0.90 5 0.11 17 0.42 0.92 6 ----- 22 ----- ----- 7 ----- 18 ----- -----
B.7 PLANO Y CUADRO DE CANTIDAD DE OBRA La implementación del diseño de tiempo de semáforos implica definir la necesidad de equipo, ubicación y tipo del mismo. En la Figura B.11 se muestra los sitios en los que se colocarán los postes, ménsulas, cajas de inspección y cableado necesarios para la intersección del ejemplo y que en la Tabla B.10 y en la Tabla B.11 se presenta la relación de necesidades.
Elaboración propia.
FIGURA B.11. Ubicación del equipo

ANEXO B. MÉTODO SECUENCIAL PARA PROGRAMACIÓN DE SEMÁFOROS DE TIEMPO FIJO
B-24
TABLA B.10. Cuadro de postes
Cuadro de postes Semáforos tipo Ménsulas Poste Intersección
Nº Poste
Nº Peatonal
Frente Izquierda Derecha 4,5m Recto 1 2 1 2 1 1 3 1 1 4 1 1 1 5 1 1 6 1 1
1
7 1 2 1
TABLA B.11. Cuadro de cantidades de obra Cuadro de cantidades de obra
Intersecciones Semáforos nuevos Postes nuevos Bases de concreto Controlador local
Vehicular Ménsula
Cable de interconexión
Cámaras de
inspección
Nº
Nombre Peatonal
Frente Izq. Der
Recto
3,5 4,5 A B 0,4*0,4
Columna recta
Ménsula
5V,2P
1 Acceso A con acceso
B
4
4
2
1
5
2
328
115
7
5
2
1

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-1
C SEMÁFOROS ACCIONADOS POR EL TRÁNSITO Este documento es una traducción del Capítulo 23 Semáforos accionados y detección del libro Ingeniería de Tránsito de William R McShane y Roger B Roess, 1990.
Este documento presenta una introducción al uso de semáforos de tránsito que están accionados por la llegada de vehículos individuales en uno o más accesos. La programación de tiempo de tales semáforos esta controlado por la demanda de tránsito, medida mediante dispositivos de detección ubicados en uno o más accesos de la intersección. Entonces, en una instalación de semáforos accionados, las duraciones de ciclo y de tiempo de verde pueden variar de un ciclo a otro dependiendo de la secuencia y número de accionamientos detectados.
Se debe hacer una clara distinción entre planes de control del tránsito hechos en forma preplanificada sin información de las condiciones actuales, planes de control de tránsito con respuesta a todos los cambios generales al patrón de la demanda de tránsito, y respuesta al accionamiento local en intersecciones individuales por llegadas de vehículos individuales.
Este capítulo está orientado hacia: el accionamiento local en la semaforización de intersecciones individuales. Ya que los detectores son esenciales para la operación de un controlador accionado, su uso y localización serán tratados en éste capítulo.
No debería asumirse que el suministro de una mayor sensibilidad, en términos del sistema o accionamiento local es siempre la opción preferida ante el control prefijado. En muchos casos, el patrón de la demanda de tránsito es muy regular, y los beneficios adicionales del accionamiento local son mínimos o quizá no exista. En otros casos, el accionamiento local puede ser de beneficio aún dentro de un sistema altamente regular y coordinado, si se usa de tal manera que no interfiera con la operación del sistema. Es interesante, por lo tanto, considerar cuan regular pueden ser los patrones de demanda del tránsito.
C.1 REGULARIDAD DEL VOLUMEN DE TRÁNSITO EN ARTERIAS.
En la mayoría de los casos, a los ingenieros de tránsito les puede interesar establecer la operación de semáforos de manera que atienda la demanda de un período pico (Por ejemplo, el período pico de la mañana), cuestionándose que tan bien se satisface la demanda de tránsito o si la estimación de ella es la correcta. Es muy posible que un camión volcado u otro incidente inesperado pudiese distorsionar el patrón de tránsito. Pero el interés fundamental es responder la pregunta si de un modo o de otro

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-2
hay una variabilidad inherente a la demanda de la mañana que pueda ir en contra del patrón de tránsito planificado previamente.
C.1.1 Variabilidad inherente a la demanda de tránsito. En Toronto, Canadá (McShane y Crowley, 1976) fue contratado un estudio sobre la estabilidad y/o la variabilidad de la demanda de tránsito. Los datos se obtuvieron por cortesía del Departamento Metropolitano de Carreteras y Tránsito de Toronto en cuatro lugares durante 77 días en una dirección por lugar. Los aforos fueron tomados y grabados en períodos de 5 minutos lo cual sumaron 13291 muestras sobre todos los días y lugares.
La Figura C.1 utiliza los promedios de un sitio para ilustrar lo que es obvio, primero, que los picos de tránsito se incrementan en la mañana de los días de semana y luego caen a un nivel significativo y segundo, los patrones de tránsito en sábados y domingos son diferentes a los de día de semana. Ya que los datos fueron obtenidos en una dirección solamente, no debe asumirse que el patrón en el flujo contrario es similar. Esta figura también muestra que el patrón no varía significativamente en viernes y lunes del promedio.
FIGURA C.1. Patrones de tránsito promedio en un sitio, por día de semana.
FUENTE: W. McSHANE y K. CROWLEY. Regularity of Signal Detectors – Observed Arterial Traffic Volume Characteristics, Transportation Research Record 596, Transportation Research Board, Washington, D. C. , 1976. Citado en: McSHANE, W.R., y ROESS, R. P. Traffic Engineering, 1ª ed., Englewood Cliffs, New Jersey. Prentice Hall, 1990. 660 p.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-3
La Figura C.2 muestra la variabilidad en un día de semana del aforo para el mismo lugar, en la cual la zona sombreada indica el área dentro de la cual caen el 95% de las observaciones. Este no es el límite de confianza de la estimación de un promedio; el límite de confianza es mucho más estrecho, pues éste resulta después de dividir por la raíz cuadrada del número de muestras dentro de los períodos de 5 minutos dados. En otras palabras, éste es el rango dentro del cual hay un 95% de posibilidades que el nivel actual de aforo caerá.
FIGURA C.2. Variabilidad del aforo en un sitio, por período de tiempo. FUENTE: W. McSHANE y K. CROWLEY. Regularity of Signal Detectors – Observed Arterial Traffic Volume Characteristics, Transportation Research Record 596, Transportation Research Board, Washington, D. C. , 1976. Citado en: McSHANE, W. R., y ROESS, R. P. Traffic Engineering, 1ª ed., Englewood Cliffs, New Jersey. Prentice Hall, 1990. 660 p.
La variabilidad aparenta ser grande. En efecto es más o menos 120 veh/h-carril, o casi 10 veh/carril en un período de 5 minutos. Esto sucede cuando el aforo promedio es alrededor de 40 veh/carril en un período de 5 minutos, de manera que la predicción podría ser más o menos del 25%, lo cual no es una cantidad despreciable. ¿Es posible actuar como si los niveles de tránsito fuesen predecibles de un día para otro con el propósito de establecer el plan de semáforos?
La Figura C.3 muestra una óptica diferente de los mismos datos: pues no están asociados con la variabilidad de los aforos dentro de un período fijo, en cambio sí con la variabilidad del tiempo en el cual un nivel de volumen específico es alcanzado. Si se establecen los semáforos para un nivel de 720 veh/h-carril para las 6:45 de la mañana, ¿Cuál es la probabilidad que este nivel inicie a las 6 de la mañana o a las 7:15 de la mañana, y se tenga un desajuste total en las programaciones de los semáforos y en los niveles de tránsito?
Esta Figura muestra la regularidad para alcanzar el inicio de niveles de tránsito específicos. Por ejemplo, el nivel de 720 veh/h-carril es casi siempre alcanzado entre las 6:50 y las 7:10 de la mañana.
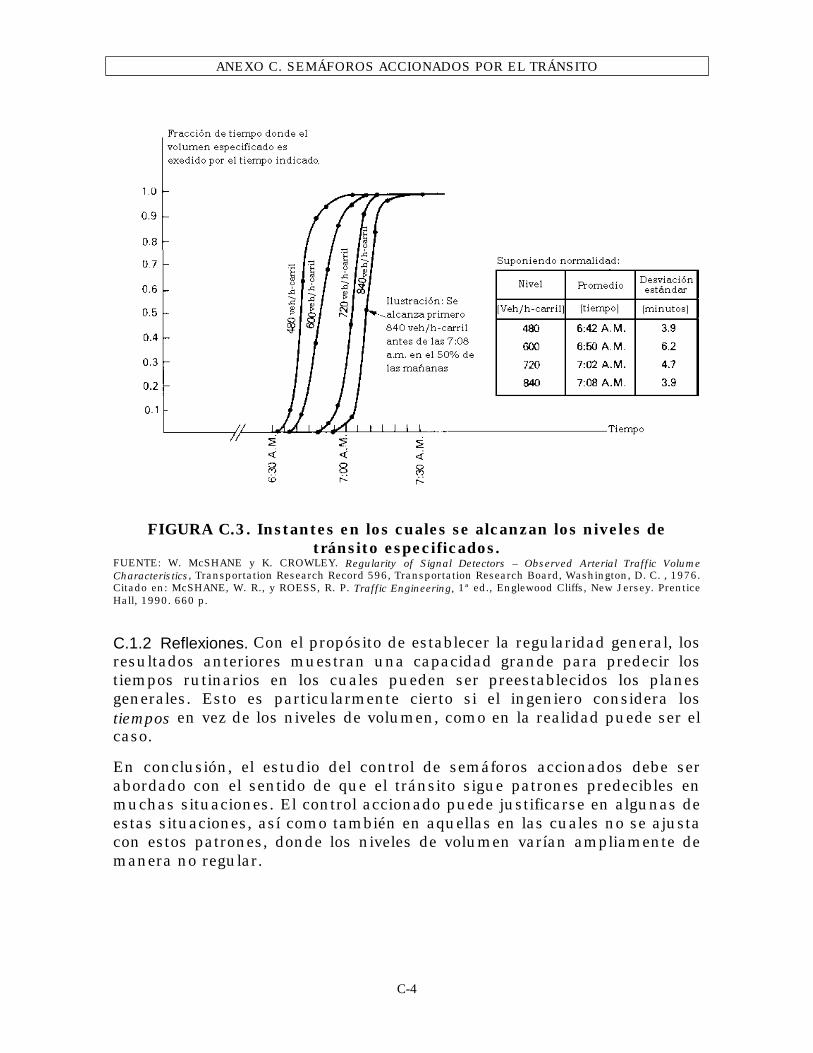
ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-4
FIGURA C.3. Instantes en los cuales se alcanzan los niveles de
tránsito especificados. FUENTE: W. McSHANE y K. CROWLEY. Regularity of Signal Detectors – Observed Arterial Traffic Volume Characteristics, Transportation Research Record 596, Transportation Research Board, Washington, D. C. , 1976. Citado en: McSHANE, W. R., y ROESS, R. P. Traffic Engineering, 1ª ed., Englewood Cliffs, New Jersey. Prentice Hall, 1990. 660 p.
C.1.2 Reflexiones. Con el propósito de establecer la regularidad general, los resultados anteriores muestran una capacidad grande para predecir los tiempos rutinarios en los cuales pueden ser preestablecidos los planes generales. Esto es particularmente cierto si el ingeniero considera los tiempos en vez de los niveles de volumen, como en la realidad puede ser el caso.
En conclusión, el estudio del control de semáforos accionados debe ser abordado con el sentido de que el tránsito sigue patrones predecibles en muchas situaciones. El control accionado puede justificarse en algunas de estas situaciones, así como también en aquellas en las cuales no se ajusta con estos patrones, donde los niveles de volumen varían ampliamente de manera no regular.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-5
C.2 CONTROL ACCIONADO
Antes que los controladores estuviesen basados en microprocesadores y en la electrónica digital moderna, las características especiales de los controladores accionados habían sido construidas dentro del equipo de informática, de manera que los diferentes grados de sensibilidad suponían diferentes clases de equipo para el controlador, generalmente clasificado en tres tipos:
• Semiaccionado
• Accionado
• De volumen-densidad.
Los controladores modernos son llamados simplemente como controladores accionados, con posibilidad de establecer en el controlador y en el detector correspondiente el nivel y tipo de respuesta específica.
Este capítulo está organizado por funciones comenzando por el control semiaccionado. Sin embargo, el lector debe tener en cuenta que el tipo de respuesta de control y el equipo informático a implementar son ahora productos más o menos distintos. La mayoría de los controladores accionados son hoy capaces de implementar cualquiera de los tipos de control accionado mencionados.
C.2.1 Equipo informático disponible. Para todos los propósitos prácticos hay dos tipos de equipos informáticos para el control accionado: aquellos designados por las especificaciones NEMA y los controladores tipo 170/179.
La Asociación Nacional de Fabricantes Eléctricos de los Estados Unidos de América (NEMA) ha desarrollado normas que consideran los controladores accionados, detectores, monitores de conflicto, interruptores de potencia, intermitentes y requerimientos generales para los gabinetes. El propósito de estas normas es suministrar uniformidad en el equipo adquirido. Los fabricantes de controladores han encontrado la relación expectativa/necesidades del mercado útil para adecuarse a estas normas.
Algunas agencias utilizan el controlador tipo 170, desarrollado conjuntamente por los estados de Nueva York y California. Este controlador utiliza un microprocesador de propósito general, donde el tipo de control es implementado por el software. El tipo 179 es un modelo posterior.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-6
Ya que las normas de NEMA son especificaciones funcionales, las apariencias del equipo de informática pueden diferir, pero las funciones de control implementadas son similares.
C.2.2 El concepto y la programación de tiempos del controlador semiaccionado. La premisa principal en el control semiaccionado es que hay una “calle principal” que debería tener el verde tanto como fuese posible y una “calle secundaria” que debería tener verde solamente el suficiente para atender la relativamente baja y de algún modo impredecible demanda que ocurre en ella. La calle secundaria pudiera ser una calle local y en algunos casos un acceso a un centro comercial.
En tales lugares, los detectores son colocados solamente en los accesos de la calle secundaria. La Figura C.4 ilustra la ubicación de los detectores en la calle secundaria.
FIGURA C.4. Calle secundaria con detectores para el uso en el control semiaccionado.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-7
C.2.2.1 Concepto y beneficios. El concepto básico de un controlador semiaccionado es el siguiente. Se utiliza un detector en la calle secundaria para identificar la llegada de un vehículo; el controlador recibe este aviso; si la calle principal ha tenido “suficiente” verde, la calle secundaria recibe el verde por un tiempo suficiente para garantizar que sus vehículos sean atendidos (a menos que hayan tantos, que en cierto instante su verde será suspendido para serle devuelto después que la calle principal haya tenido otro período de verde apropiado).
Hay algunas suposiciones implícitas en esta operación: 1. El tránsito en la calle secundaria es siempre el flujo menor; 2. Probablemente todos los vehículos de la calle secundaria serán detenidos; 3 No hay una estructura de llegadas en la calle secundaria que pueda ser servida de mejor manera con períodos de verde programados regularmente.
Las situaciones en las que es ventajoso el uso del control semiaccionado son:
1. La calle principal es una arteria y la demanda del período valle en la calle secundaria es baja y casi aleatoria, de manera que la calle principal realmente debe tener el verde siempre que sea posible. Un ejemplo es una calle residencial que tiene demanda baja y aleatoria durante las horas del período valle.
2. La calle principal es una arteria y la demanda en la calle secundaria tiene picos en períodos pequeños debido a un generador de tránsito local, en tal caso la calle secundaria requerirá un tiempo de verde importante solo en intervalos aislados. Ejemplos de tal situación son los establecimientos de comidas rápidas, iglesias, colegios, fábricas y otros negocios en los cuales el tránsito se descarga en oleadas discretas.
3. Cuando es necesario un semáforo pero éste podría desbaratar el movimiento progresivo en cada ciclo si se instala como un semáforo de tiempo fijo. Instalado como un semáforo semiaccionado con una función de “suspensión” para mantenerla aleatoriamente interrumpiendo la calle principal en los momentos peores posibles, él podría desorganizar la progresión solamente cuando la demanda fuese esa y únicamente en los pocos momentos posibles.
4. Cuando un semáforo se instale en respuesta a una justificación que no está relacionada con el volumen vehicular, tal es el caso de una justificación peatonal, por accidentes, o como parte de un programa de protección del cruce en escuelas, y en casos semejantes.
No hay una regla absoluta para establecer cuando debe usarse un control de tiempo fijo o accionado para lograr los mejores efectos. La Figura C.5 muestra una recomendación para hacer tal determinación, producto de un

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-8
estudio de la NCHRP (TARNOFF y PARSONSON, 1981). Está basado en la comparación entre los volúmenes del carril crítico en una calle principal y en una secundaria y recomienda el tipo de control fundamentado solamente en estos factores. Si bien es una guía informativa, generalmente no aceptada en la práctica, e ignora otros factores que podrían influenciar la selección del tipo de control.
FIGURA C.5. Una recomendación para determinar el tipo de control. FUENTE: TARNOFF y PARSONSON, “Selecting Traffic Signal Control at Individual Intersections,” NCHRP Report 233, Transportation Research Board, Washington, D. C., junio, 1981. Citado en: McSHANE, W. R., y ROESS, R. P. Traffic Engineering, 1ª ed., Englewood Cliffs, New Jersey. Prentice Hall, 1990. 660 p.
C.2.2.2 Terminología y principios de programación de tiempo. Siempre es necesario establecer el intervalo de verde peatonal y el intervalo de verde intermitente peatonal, cada uno de los cuales será definido y usado solo si se necesita accionamiento peatonal. También es necesario establecer el intervalo de amarillo y el de todo rojo de despeje para cada fase.
Para una operación semiaccionada es esencial establecer el verde mínimo para la vía principal y un intervalo inicial, un intervalo vehicular y un intervalo máximo para la calle secundaria (es decir, para la fase accionada).
ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-9
Para propósito de éste texto se considerará primero un detector puntual (es un detector que observa el tránsito en un punto de la vía en vez de un área de ella, es decir, un lazo normalizado de 6 pies por 6 pies ó 1,80 m por 1,80 m).
El intervalo inicial es diseñado para permitir que el espacio entre el detector y la línea de detención sea despejado por los vehículos.
El intervalo vehicular también llamado el “intervalo de extensión” o el “intervalo unidad” es el tiempo que el verde es extendido por cada llegada al detector desde el instante de llegada al detector.
Para evitar que los vehículos sean atrapados entre el detector y la línea de detención, es necesario que el intervalo vehicular sea al menos el “tiempo de paso” de un vehículo desde el detector hasta la línea de detención.
Intervalo máximo o período máximo es simplemente el tiempo total permitido para la fase. En éste momento si aún permanecen vehículos por ser procesados, la “llamada” o accionamiento es postergado de manera que la calle secundaria recibirá de nuevo el verde después que la calle principal sea servida por su mínimo preestablecido.
La Figura C.6 ilustra la operación de la fase accionada bajo una demanda significativa. Previo al inicio de éste diagrama, se ha hecho una “llamada” al verde por parte de la llegada de un vehículo en la calle secundaria. Una vez que la calle principal ha completado su mínimo, su tiempo de amarillo y el tiempo de todo rojo de despeje. Entonces a la calle secundaria se le da el intervalo inicial más una extensión por la llegada. Si ocurre una llegada adicional como verdaderamente sucede en esta ilustración, la nueva unidad de extensión es iniciada desde el instante de llegada del vehículo (No adicionada sencillamente al tiempo planificado). Tal como se sugiere por las áreas rayadas, una porción de la extensión unidad vieja es desechada y remplazada. Si se alcanza el período máximo, entonces la última llamada es postergada, y el proceso comenzará de nuevo después que la calle principal sea servida. Observe que el tiempo total suplementario solicitado por los vehículos adicionales se ha denominado como el período de extensión..
Si el tránsito fuese menos intenso, el período de extensión podría no alcanzar el máximo; en cualquier momento cuando un intervalo vehicular se agote sin la llegada de un nuevo vehículo (Indicada por un asterisco, *), el verde podría retornar a la calle principal después del amarillo de la calle secundaria y del todo rojo de despeje.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-10
FIGURA C.6. Ilustración de una fase accionada por la llegada de vehículos.
FUENTE: Federal Highway Administration. Traffic Control Devices Handbook, Part IV – Signals, 1983. Citado en: McSHANE, W. R., y ROESS, R. P. Traffic Engineering, 1ª ed., Englewood Cliffs, New Jersey. Prentice Hall, 1990. 660 p.
C.2.2.3 Ubicación del detector. La localización del detector tiene gran importancia: el “intervalo inicial” debe ser suficientemente largo para despejar la cola de vehículos entre el detector y la línea de detención, y la unidad de extensión [o intervalo de extensión o intervalo vehicular] debe ser lo suficientemente larga para permitir el paso de un vehículo que llega al detector hasta la línea de detención.
El tiempo para despejar una cola está basado en los intervalos de descarga (Incluyendo el tiempo de arranque). Una estimación razonable es la siguiente:
Intervalo inicial = 4 + 2 Entero [distancia/20] (Fórmula 1)
Intervalo inicial = 4 + 2 Entero [distancia/6,10]1
En la primera expresión la distancia se especifica en pies y en la segunda en metros para que el resultado sea en segundos.
1 1 pie = 0,3048 metros.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-11
Donde “Entero” es una función que se aplica a lo que esté en corchetes y se debe interpretar como el “próximo entero mayor” a la distancia en pies. Entonces un detector colocado a 40 pies (12,2 metros) de la línea de detención (setback) podría requerir un intervalo inicial de 8 segundos y un detector colocado a 100 pies (30,5 metros) uno de 14 segundos. Un detector colocado a 105 pies (32 metros) podría necesitar:
Intervalo inicial = 4 + 2 Entero [5,25] = 4 + 2*6 = 16 segundos en vez de 14 segundos que es un poco conservador.
Suponiendo que los vehículos viajan a 25 millas/hora2 (39,5 km/h) cuando se acercan al verde de la vía secundaria (A 36 pies/s o 10,97 m/s) un detector colocado a 100 pies (30,5 metros) podría necesitar 100/36= 2,78 (30,5/10,97 = 2,78), o sea 2,8 segundos de intervalo vehicular, debido al tiempo de paso del mismo.
Esta ubicación podría presentar algunas dificultades: El verde mínimo relativamente largo (16 + 2,8 = 18,8 segundos para un detector a 100 pies, o 30,5 metros, de la línea de detención) podría generar mucho verde desperdiciado para solamente un vehículo en la calle secundaria y dar la impresión que la operación no es “elegante” y apropiada a las necesidades del tránsito; imagínese la impresión de los conductores en la calle principal sentados y sorprendidos preguntándose por qué el verde está siendo desperdiciado.
Y más aún, localizaciones de detectores más retiradas ocasionarían el problema de los vehículos que no están siendo detectados: aquellos estacionados entre la entrada o boca calle y la línea de detención o aquellas entradas que existen en dicha área. Claramente, los detectores no pueden ser colocados hasta el encuentro de estos problemas (deben usarse detectores adicionales).
C.2.2.4 Detectores de presencia versus de paso. La exposición anterior está relacionada con los detectores “puntuales” los cuales incluyen los lazos normalizados de 6 pies por 6 pies o de 1,80 por 1,80 metros (los detectores puntuales son a menudo llamados detectores de “área pequeña”).
Son utilizados como detectores de movimiento o de paso, cuando un vehículo pasa a través o por encima de la zona del detector. Para esta operación, el controlador se habilita para la detección en la posición “L” o “Asegurado”, indicando que la memoria del vehículo es almacenada en el controlador hasta que sea usada.
2 1 milla = 1580 metros; 1 milla = 5184 pies

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-12
Ahora están en mayor uso los detectores de área, bien sea lazos largos sencillos o una serie de lazos pequeños conectados juntos como uno más largo. Estos se utilizan para detección de presencia, con el controlador establecido en la posición “NL” o “No asegurado” en el cual sólo se registra la presencia de los vehículos en la zona del detector.
Dichos detectores tienen ventajas en ciertas aplicaciones tales como en calles secundarias con el giro a derecha en rojo (de manera que no se dan los verdes innecesarios a la calle secundaria) y en bahías de giro a izquierda (de manera que la bahía es vaciada a pesar de algunos arranques lentos que pueden ser más grandes que la unidad de extensión).
Cuando se utilizan los detectores de área, es común establecer el intervalo inicial en cero (o tan bajo como el equipo lo permita) y la zona del detector debe extenderse hasta la línea de detención.
C.2.2.5 Problemas debido a la alta demanda en la calle secundaria. A pesar del supuesto de demanda relativamente baja en la calle secundaria es posible que efectivamente se experimente una demanda muy alta o al menos sea percibida: la demanda real puede existir por la descarga desde una fábrica o debido a reasignación del tránsito a causa de un incidente; la demanda falsa puede existir simplemente por que un detector falla y continuamente hace llamadas al controlador.
En tales casos, el verde mínimo de la calle principal y el verde máximo de la secundaria (con el amarillo y todo rojo apropiados) podría constituirse en una operación de tiempos prefijados. El reparto puede ser desventajoso para la calle principal, a menos que éste se encuentre explícitamente considerado en la programación original. Dada la premisa que fue la prioridad de la calle principal la que justificó una operación semiaccionada, esto resultará aún más frustrante.
Considere las siguientes condiciones:
• El mínimo de la calle principal es de 40 segundos.
• El intervalo inicial de la calle secundaria es de 8 segundos.
• El intervalo vehicular es de 2 segundos
• El amarillo más el todo rojo es de 4 segundos por fase. (Entreverde)
Se tienen dos fases. ¿Cuál es el verde máximo de la calle secundaria para asegurar que el reparto sea siempre al menos de 60/40 favoreciendo a la calle principal? ¿Cuál es la duración del ciclo (para el peor caso) si la demanda en la calle secundaria es muy alta?
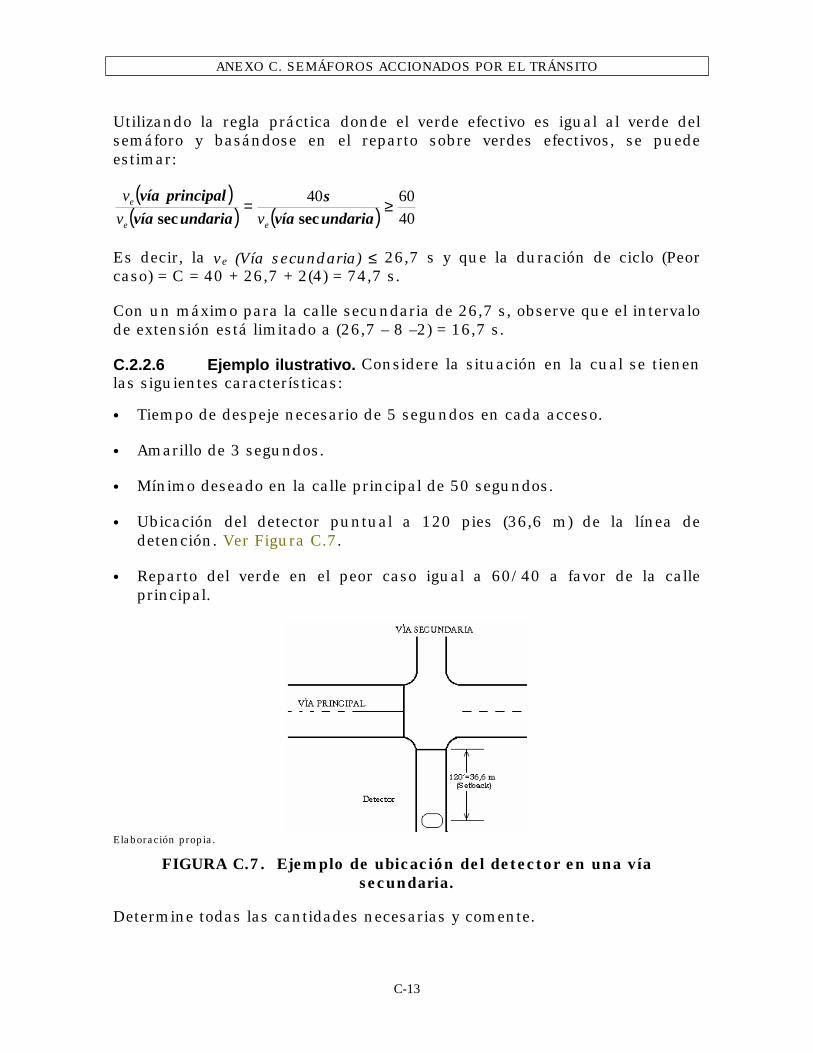
ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-13
Utilizando la regla práctica donde el verde efectivo es igual al verde del semáforo y basándose en el reparto sobre verdes efectivos, se puede estimar:
( )( ) ( ) 40
6040 ≥=undariavías
undariavíaprincipalvía
secsec ee
e
vvv
Es decir, la ve (Vía secundaria) ≤ 26,7 s y que la duración de ciclo (Peor caso) = C = 40 + 26,7 + 2(4) = 74,7 s.
Con un máximo para la calle secundaria de 26,7 s, observe que el intervalo de extensión está limitado a (26,7 – 8 –2) = 16,7 s.
C.2.2.6 Ejemplo ilustrativo. Considere la situación en la cual se tienen las siguientes características:
• Tiempo de despeje necesario de 5 segundos en cada acceso.
• Amarillo de 3 segundos.
• Mínimo deseado en la calle principal de 50 segundos.
• Ubicación del detector puntual a 120 pies (36,6 m) de la línea de detención. Ver Figura C.7.
• Reparto del verde en el peor caso igual a 60/40 a favor de la calle principal.
Elaboración propia.
FIGURA C.7. Ejemplo de ubicación del detector en una vía secundaria.
Determine todas las cantidades necesarias y comente.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-14
1. Es fácil notar que habrá 3 segundos de amarillo, 2 segundos de todo rojo y 50 segundos especificados como mínimo en la calle principal.
2. De la ecuación (1) el intervalo inicial en la calle secundaria será: 4 + 2 Entero(120 pies/20) = 16,0 s ó 4+2 Entero(36,6/6,1)=16s.
3. Suponiendo una velocidad de aproximación de 20 millas/hora (31,6 km/h u 8,8 m/s), en la calle secundaria la extensión vehicular (o intervalo de extensión) debería ser: 120/29,4 pies/s (36,6 m/8,8 m/s =4,2 s) lo que es igual a 4,08 o sea 4,1 segundos. (Este valor no se suministra pero es necesario de manera que hay que hacer una suposición explícita razonable).
4. Este resultado arroja 16 + 4,1 = 20,1 segundos como verde mínimo en la calle secundaria.
5. Además, utilizando la lógica de la subsección precedente el verde máximo de la calle secundaria debería ser de 33,3 segundos para permitir, en el peor caso, un reparto de 60/40 (Incidentalmente, duración del ciclo correspondiente de 50 + 33,3 + 2(5)= 93,3 segundos).
( )( ) ( ) ( ) ssundariavía
undariavías
undariavíaprincipalvía
333604050
406050 ,sec
secsec==⇒≥= e
ee
e vvv
v
6. Observe que el período de extensión máximo en la calle secundaria podría ser (33,3 – 20,1) = 13,2 segundos más de tres intervalos vehiculares (Aunque podrían servirse más debido a los traslapes posibles, ver la Figura C.8 Ejemplo y Figura C.6).
7. Para evaluar y comentar simplemente considérese usted mismo en la calle principal detenido debido a la “demanda” en la calle secundaria: Si está presente un vehículo es procesado entre 4 y 5 segundos como máximo pero el semáforo se mantiene en verde a causa de “ellos” por 20,1 segundos; la “sensibilidad” (variación de la fase) de la calle secundaria oscila entre 20,1 hasta 33,3 segundos; cualquier intento por incrementar esta sensibilidad aumentando el máximo de la calle secundaria resultaría en un riesgo de ocurrir un “caso peor” el cual podría arrojar desventajas para la calle principal.
En general, parece que la operación actual sería un poco pobre y ciertamente nada elegante, teniendo mucho cuidado en los vehículos ocasionales de la calle secundaria y volviendo al objetivo principal el cual es servir a la calle principal.
El mayor problema es la ubicación del detector; un factor contribuyente es la especificación del mínimo [verde] en la calle principal.
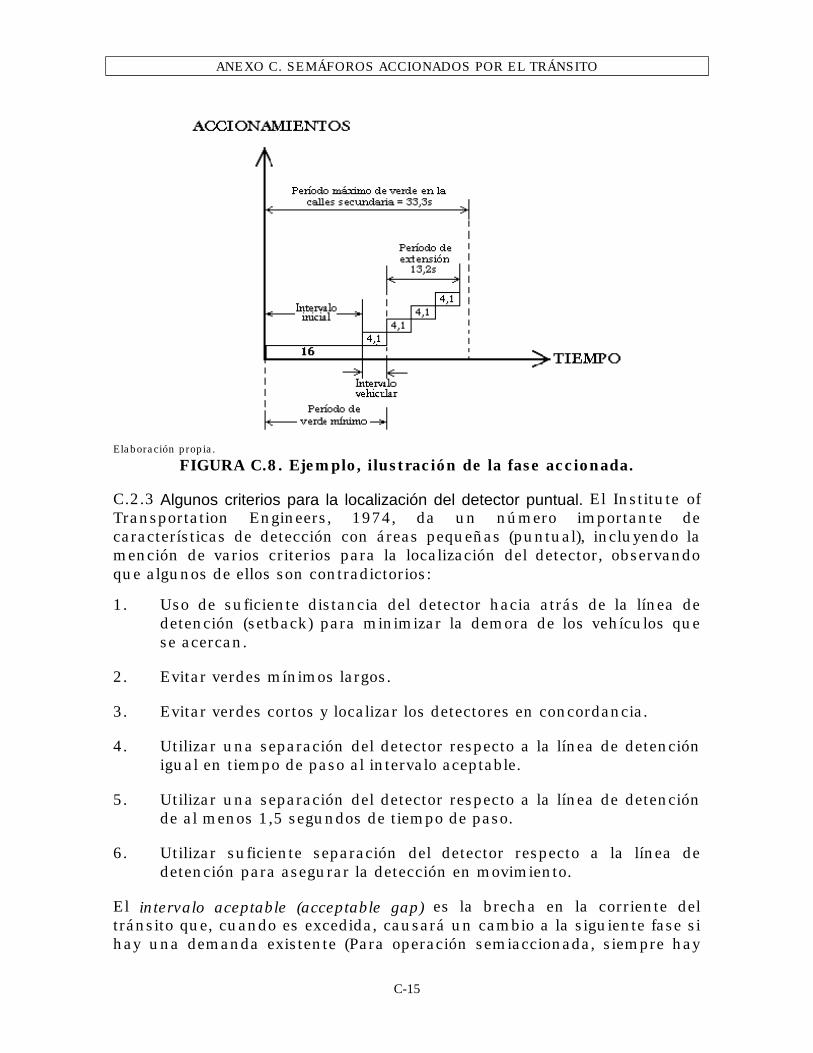
ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-15
Elaboración propia.
FIGURA C.8. Ejemplo, ilustración de la fase accionada.
C.2.3 Algunos criterios para la localización del detector puntual. El Institute of Transportation Engineers, 1974, da un número importante de características de detección con áreas pequeñas (puntual), incluyendo la mención de varios criterios para la localización del detector, observando que algunos de ellos son contradictorios:
1. Uso de suficiente distancia del detector hacia atrás de la línea de detención (setback) para minimizar la demora de los vehículos que se acercan.
2. Evitar verdes mínimos largos.
3. Evitar verdes cortos y localizar los detectores en concordancia.
4. Utilizar una separación del detector respecto a la línea de detención igual en tiempo de paso al intervalo aceptable.
5. Utilizar una separación del detector respecto a la línea de detención de al menos 1,5 segundos de tiempo de paso.
6. Utilizar suficiente separación del detector respecto a la línea de detención para asegurar la detección en movimiento.
El intervalo aceptable (acceptable gap) es la brecha en la corriente del tránsito que, cuando es excedida, causará un cambio a la siguiente fase si hay una demanda existente (Para operación semiaccionada, siempre hay
ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-16
una demanda para retornar a la calle principal). El intervalo aceptable es a menudo igual al intervalo vehicular [intervalo de extensión].
Los primeros cuatro elementos citados se dan como criterios principales. Algunos de los criterios no se aplican a operación semiaccionada pero si en algo para la totalmente accionada.
Para asegurar que los vehículos que se acercan no se detengan, el detector debe estar tan atrás como para que (a) detecte la llegada de un vehículo y (b) permita suficiente tiempo para acabar la otra fase si la primera ha terminado su mínimo, aún permitiendo a los vehículos que se aproximan ver de 2 a 3 segundos de verde. Para un amarillo más todo rojo de 4 segundos, esto implicaría una separación del detector respecto a la línea de detención correspondiente a 6 o 7 segundos. En un acceso cuya velocidad de aproximación es de 40 millas/hora [63,2 km/h], esto representa entre 350 hasta 410 pies (107-125 m). Claramente el mismo detector no podría ser usado para esta función y para despejar la cola entre éste detector y la línea de detención; podrían ser necesarios dos detectores distintos.
Observe que un detector sencillo tan retirado podría implicar un tiempo de paso igual a 6 o 7 segundos. Si fuese usado como el “intervalo aceptable”, podría permitirse brechas muy largas en los patrones de llegada en detrimento de la operación del tránsito. Entonces podrían ser esencial diferentes programaciones de “tiempo de paso” e “intervalo aceptable”.
El criterio de “evitar verdes cortos” colocaría un límite más bajo en la separación de los detectores hasta la línea de detención. Para mantener un verde mínimo de 10 segundos con intervalo vehicular de 2 segundos, el intervalo inicial debería ser de 10 – 2 = 8 segundos, lo cual implica mínimo 40 pies (12,2 m) como separación entre el detector y la línea de detención [Proviene de la formula 1].
El criterio de “al menos 1,5 segundos” como tiempo de paso esta basado en la observación de que los vehículos más cercanos (en tiempo) a la línea de detención la atraviesan en cualquier caso; si el detector estuviese más cercano, el vehículo podría hacer ambas cosas atravesar y generar una llamada.
El criterio de “asegurar la detección en movimiento” esta basado en el hecho que los detectores requieren una velocidad mínima en los vehículos para causar una señal.
C.2.4 El controlador totalmente accionado. Un controlador accionado se dice que opera en modo totalmente accionado cuando todas las fases y accesos tienen detectores y operan en el modo accionado. Un controlador moderno suministra cualquiera de los dos modos, semiaccionado o totalmente
ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-17
accionado simplemente con el uso de interruptores de retorno en las fases individuales. En una operación de dos fases, el controlador funciona en el modo semiaccionado mediante la colocación del interruptor de retorno de la calle principal en la posición “on” (“encendido”); esto hace que el verde vuelva en sustitución del verde mínimo. Un controlador se establece como operación prefijada mediante la colocación de los dos interruptores de retorno en “on” (“encendido”). Cuando ambos interruptores de retorno son apagados (posición “off”)se ha seleccionado el modo de operación totalmente accionado.
Los equipos más viejos fueron diseñados para funciones específicas; entonces, hubo (Y todavía hay en algunas instalaciones) piezas del equipo informático que pueden hacer solamente la función de semiaccionada.
C.2.4.1 Conceptos y beneficios. El concepto fundamental de una operación totalmente accionada es que las demandas competitivas son igualmente importantes, y que no hay una estructura de patrones de arribo en algún acceso que pudiese tomar ventaja.
El accionamiento total es muy apropiado en intersecciones aisladas en las cuales los niveles de demanda varían significativamente, y/o, la dirección principal varía de una fase a la otra (No varía de una dirección a la otra en la misma fase como sucede en los períodos pico de la mañana y de la tarde).
También es fundamental en una operación totalmente accionada igualar el deseo (Al menos en volúmenes bajos) de evitar la detención de vehículos innecesariamente. El debate sobre la localización del detector en la sección precedente se relaciona directamente con esto.
C.2.4.2 Terminología y principios sobre la programación de tiempos. La terminología y los principios para la programación de tiempos son esencialmente las mismas que para semiaccionada, con todas las fases operando en modo accionado. La diferencia es que, de acuerdo con las especificaciones de NEMA, el tiempo de verde máximo no comienza a ser programado hasta que haya una llamada desde la fase o fases conflictivas. En el caso de una operación semiaccionada, esto es como si el equipo viese la llamada hecha en la calle principal en el instante en que recibe primero el verde en la calle secundaria.
En una operación totalmente accionada, es posible que la “llamada” en la otra fase pueda recibir inmediatamente el verde, si no hay demanda en el acceso que tiene verde en ese momento. Si la demanda en el acceso que tiene verde es alta, también es posible que la “llamada” de la otra fase conflictiva pueda esperar que termine el verde máximo antes de obtener su verde.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-18
Un intervalo vehicular típico (Extensión o intervalo unidad) es de 3,5 segundos; esto conduce a un intervalo aceptable útil y una operación relativamente elegante.
A pesar del debate anterior sobre la localización del detector, es común con controladores accionados “básicos“ colocar el detector no más de 120 pies (36,6 m) hacia atrás de la línea de detención. Colocarlo más atrás podría implicar intervalos iniciales muy largos para una operación elegante. Entonces, para equipo informático accionado básico, el criterio de eliminar la detención en el vehículo que llega no podría lograrse para velocidades de aproximación más altas.
Para velocidades de 35 millas/h (56,3 km/h) o más, la solución podría corresponder al uso de controladores accionados “avanzados” que tienen un intervalo inicial variable. Esto se discute más adelante.
C.2.4.3 Programación de tiempos del controlador accionado. La programación de tiempos de una operación totalmente accionada sigue la misma lógica que para una fase accionada de una operación semiaccionada, sujeto a las observaciones ya hechas. Debe ser considerado el problema potencial de una demanda real o falsa induciendo una operación totalmente accionada, de manera que algunas posiciones equitativas entre las fases estarían asegurando éste “peor caso”.
C.2.5 El control de densidad. Una forma avanzada común de controlador accionado es conocida como el controlador de densidad ya que tiene características adicionales. Históricamente, ha habido una pieza del equipo informático conocida como el controlador volumen-densidad, el cual se construyó dentro del equipo para dotarlo de ciertas características como (a) conservar el rastro del número de llegadas y (b) reducir el intervalo aceptable de acuerdo a varias reglas, como los vehículos descubiertos o el tiempo avanzado. Aunque fueron sensibles a los patrones de brechas y no a la densidad directamente, el nombre fue utilizado debido a la relación entre las brechas y la densidad. Los anteriores controladores volumen-densidad utilizaron tubos al vacío electrónicos que permitieron la sensibilidad de la brecha.
Las especificaciones NEMA permiten la reducción de la brecha basada solo en el tiempo de espera en el rojo. Por esto, el controlador moderno es conocido como controlador de densidad modificada o densidad.
Los controladores mejorados tales como los de densidad tienen un intervalo inicial variable. Una programación del controlador permite al ingeniero fijar los segundos por accionamiento, los cuales son utilizados para construir un valor “inicial agregado” basado en el accionamiento en la fase durante su período de no verde.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-19
El verde mínimo vehicular actual utilizado por el controlador es el más grande de los tres siguientes:
• Verde mínimo, como se estableció.
• Inicial agregado, ya sumado.
• Período de caminar (verde peatonal) mas el de despeje peatonal (Verde intermitente) cuando se solicitó.
El intervalo inicial variable permite al controlador mantener una memoria de cuantos vehículos se descubrieron y entonces permite un verde mínimo variable, no limitado por la localización del detector.
La característica de reducción de la brecha comienza con la llamada hecha desde un movimiento conflictivo. Hay entonces tres aspectos importantes: (a) el tiempo antes de la reducción, el cual no empieza a contar hasta la llamada conflictiva, (b) el tiempo de reducción, el cual determina la tasa a la cual toma lugar la reducción de la brecha y (c) el intervalo mínimo (minimumm gap) el cual establece el valor de la brecha más bajo a ser buscado. La tasa de reducción de la brecha esta determinada por:
reduccióndetiempoimoervalopasodeTiemporeduccióndeTasa mínint−=
Con los controladores de densidad, la ubicación típica del detector hasta la línea de detención es de 400 pies (192 m). Se usa un detector de llamadas durante las porciones de no verde de la fase para grabar las llegadas más cercanas a la línea de detención pero no juega papel alguno en la extensión del verde.
C.2.6 Características especiales del controlador accionado. Las normas de NEMA son bastante claras y detalladas respecto a las funciones. Algunas de ellas no se usan en todos los casos. Este documento introduce a los conceptos básicos y funciones, de manera que el ingeniero puede entender el propósito y los principios de operación de un control accionado.
Esta sección resaltará algunos otros aspectos, opciones, y consideraciones relacionadas con el control accionado. Puede obtenerse información adicional según la FEDERAL HIGHWAY ADMINISTRATION, 1983, KELL y FULLERTON, 1982 y PARRIS, 1986. Otras publicaciones citan aspectos específicos tales como la colocación del detector, por ejemplo, Sackman et al, 1977.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-20
El uso de “lazos largos” o detectores de área en carriles de giro a izquierda es de especial interés. Tal detección de área está combinada con la detección de memoria no fija (NL) (también llamada como “memoria desconectada”).
Hay un número de funciones de control especiales de NEMA, la mayoría de las cuales son autoexplicatorias:
1. Supresión de fase
2. Supresión de peatones.
3. Mantenimiento.
4. Retorno
5. Retorno vehicular mínimo
6. Retorno vehicular al máximo.
Estas son citadas con más detalle en FEDERAL HIGHWAY ADMINISTRATION, 1983, y PARRIS, 1986. Para los propósitos presentes, es suficiente notar que las opciones en los equipos modernos normalizados permiten que el control sea confeccionado a las necesidades del lugar específico.
Hay un número de aplicaciones especiales para control accionado, algunas de las cuales requiere equipo especial o capacidades de comunicación. Estas incluye:
1. Derechos de prioridad a vehículos de emergencia como cerca de una estación de bomberos.
2. Control de prioridad a buses de transporte público.
Estos están citados en FEDERAL HIGHWAY ADMINISTRATION, 1983 y en la otra literatura.

ANEXO C. SEMÁFOROS ACCIONADOS POR EL TRÁNSITO
C-21
C.2.7 Control de una intersección crítica. El control de una intersección crítica (CIC) es un término que aparece en la literatura para el conjunto de políticas de control que específicamente cita el control de una intersección individual mediante políticas especiales y algoritmos ajustados para niveles de flujo saturados o congestionados. Se ha pensado como un control “extraordinario”, confeccionado para este problema especial y usualmente ocurre en medio de una red congestionada.
Varias políticas CIC han sido formuladas, informadas e implementadas. Algunas están basadas en la demora total minimizada para patrones de demanda conocidos (Por ejemplo en GAZIS y POTTS, 1965) otros en el “control de régimen de cola” (Por ejemplo LONGLEY, 1968) basados en las observaciones del detector.
El propósito de citar las políticas CIC es simplemente para dar a conocer que muchas de ellas son formas avanzadas de control accionado local para un problema especial agudo que a menudo requiere configuraciones y localizaciones de detectores especiales.

ANEXO D. PROGRAMA TRANSYT-7F
D-1
D PROGRAMA TRANSYT
Este anexo se preparó considerando básicamente el escrito que se halla en el Manual de planeación y diseño para la administración del tránsito y el transporte en Santafé de Bogotá, SECRETARIA DE TRANSPORTE Y TRÁNSITO DE SANTAFÉ DE BOGOTÁ, D. C. Y OTROS, 1998, complemantándola con la tesis de GÓMEZ, VALENCIA Y VILLÁN, 1987, y prácticas sobre este tema hechas en Medellín por el autor.
D.1 INTRODUCCIÓN
TRANSYT-7F es un acrónimo de TRAffic Network StudY Tool, versión 7F. El modelo TRANSYT original fue desarrollado en el Reino Unido por el señor Dennis I. Robertson en 1967 y luego con el Transport and Road Research Laboratory (TRRL). La versión 7 del TRRL fue adaptada a los Estados Unidos de América por la Federal Highway Administration (FHWA), por ello se llama 7F.
Esta guía es una referencia general del TRANSYT-7F dirigida a: ingenieros de tránsito que deseen optimizar sistemas de semáforos coordinados con el propósito de aumentar la progresión del tránsito, reducir demoras, detenciones y consumo de combustible; y también para analistas del transporte y planificadores que necesiten realizar estudios operacionales detallados. Este documento contiene la introducción a la teoría del tránsito y semáforos; descripción del programa TRANSYT-7F; aplicaciones; necesidades de datos e información, su codificación, interpretación de resultados y una ejemplificación.
Algunas empresas que desarrollan paquetes computacionales incluyen el TRANSYT-7F y posibilidades de interactuar con otros programas a elección del usuario. Este modelo puede ejecutarse en la mayoría de los computadores compatibles con IBM PC/MC-DOS.
La versión 7F ha sufrido varias revisiones y en este documento se utilizará para el ejemplo la correspondiente a la 7 la cual incluye:
• Un nuevo menú ejecutor del TRANSYT-7F y un programa de procesamiento de archivos para la versión de microcomputadores, llamada T7FEX.
• Optimización explícita de las oportunidades de progresión (PROS).

ANEXO D. PROGRAMA TRANSYT-7F
D-2
• Un algoritmo nuevo para la partición del ciclo basado en grados de saturación.
• Un manejo explícito de fases traslapadas.
• Reemplazo de la estimación de demoras aleatorias por la del Manual de Capacidad de Carreteras de los Estados Unidos de América (HCM).
• Se ha adicionado una familia de modelos de movimientos permitidos seleccionables por parte del usuario y se ha cambiado el modelo por omisión por uno desarrollado en Australia.
• Se han revisado los algoritmos de detenciones para una mejor precisión cerca y en condiciones de saturación.
• Se usa un archivo “de perforación” para capturar los planes intermedios con mejor programación de tiempos de los semáforos durante una ejecución de evaluación de duración de ciclo.
• Se permite la optimización de nodos específicos más de una vez en cada paso.
• Se permite la codificación de desfasamientos iniciales mientras se espera la respuesta del cálculo de la repartición inicial del ciclo por parte del TRANSYT-7F.
• El tamaño de la red se ha incrementado hasta 100 nodos y 600 arcos.
• Se admiten números de nodos y de arcos hasta de cinco dígitos.
• Se ofrecen los esquemas de numeración de arcos NEMA o el estándar definido por el usuario.
• Mejoramientos en los informes de resultados.
• Otras mejoras misceláneas.

ANEXO D. PROGRAMA TRANSYT-7F
D-3
Necesidades de equipo de computación
En la Tabla D.1 se indican los requerimientos mínimos de equipo de computación para ejecutar el TRANSYT-7F.
TABLA D.1. Requerimientos mínimos de equipo de computación.
Componente Requisito mínimo Opcional Procesador 8088 (PC o XT) 80286 (AT), 36 o 486 Coprocesador 640 kb 640 kb más la memoria extendida y
la unidad de manejo de memoria. Al menos 1,6 Mb de RAM.
Unidades de disco
Dos de 3,5” o 5,25” con al menos 720 kb o una unidad de disco duro.
Capacidad de RAM en disco o de cache. Los discos duros grandes permitirán el uso con otros programas.
Sistema de operación de disco (DOS)
Compatible con IBM PC DOS o MS-DOS 3.0
IBM PC/MS-DOS 4.+ o DOS compatible. Puede ejecutarse bajo OS/2 si el DOS es compatible.
Monitor Adaptador de gráficos en color (CGA) pero se acepta el monitor monocromático en aplicaciones pequeñas.
Las presentaciones pueden darse en CGA, EGA o VGA.
Impresora Impresora de texto, de matriz de puntos o letra fija.
Se recomienda mucho la impresora de gráficos y se necesita para la impresión de los Diagramas de Progresión del Pelotón.
Teclado Cualquier teclado estándar de PC.
Teclado mejorado (AT). En el ejecutor del TRANSYT-7F se usa el ratón.
Programas soporte.
Ninguno Pueden ser útiles los programas multitareas para acceder a otros programas mientras se ejecutan optimizaciones muy lentas.
FUENTE: Universidad de Florida. Transportation Research Center. Federal Highway Administration. (1991). Guía del usuario del TRANSYT-7F. Gainesville. Florida. Estados Unidos de América.

ANEXO D. PROGRAMA TRANSYT-7F
D-4
D.2 OPERACIÓN DEL TRANSYT-7F
D.2.1 Generalidades. En el mercado de programas computacionales especializados se hallan paquetes que integra al TRANSYT-7F con otros a gusto del usuario (Por ejemplo el McT7F) pero es posible ejecutarlo solo.
El McT7F tiene tres partes principales: El ejecutor del TRANSYT-7F (T7FEX) el cual controla la operación del programa, el TRANSYT-7F y los pre y post-procesadores.
El T7FEX es un programa menú alrededor del cual pueden operar y ejecutarse otros programas como el TRANSYT-7F (T7F.EXE), procesadores de datos de entrada y de salida.
Los programas procesadores de datos de entrada ayudan en la conformación de los archivos de datos de entrada al TRANSYT-7F. Hace algunos años se creó un manipulador de datos de entrada al TRANSYT-7F (T7FDIM) desarrollado por el Centro de Investigaciones de la Universidad de Florida (TRC) que no es muy cómodo de manejar pero se pueden encontrar en el mercado otros con diferentes alcances (EZ-TRANSYT, PRE-TRANSYT y QUICK-7F). Los procesadores de datos de salida permiten análisis más profundos, el Diagrama de Progresión del Pelotón (PPD) traza gráficos que relacionan los diagramas tradicionales de espacio-tiempo y el diagrama de perfil de flujo del TRANSYT-7F.
D.2.2 Convención para la numeración de arcos y nodos. El TRANSYT-7F se relaciona con todos los datos a través de un esquema de numeración de arcos y nodos conformando un esqueleto que representa la red vial a simular. En realidad se acepta cualquier tipo de nomenclatura pero podría no ser posible utilizar algunas funciones del TRANSYT-7F. Hay dos tipos de esquemas de numeración: la estándar que ha sido utilizada por años y la nomenclatura NEMA (National Electrical Manufacturers Association).
D.2.3 Utilización del paquete McT7F. Tal como se mencionó el McT7F es un programa que integra al ejecutor de programas T7FEX, el TRANSYT-7F y otros programas, de ellos el eje alrededor del cual giran los demás es el primero y a continuación se presentan las funciones y opciones de ejecución.
El menú principal utiliza el popular concepto de menús y submenús. En la Tabla D.2 se muestra un resumen de las diferentes opciones.
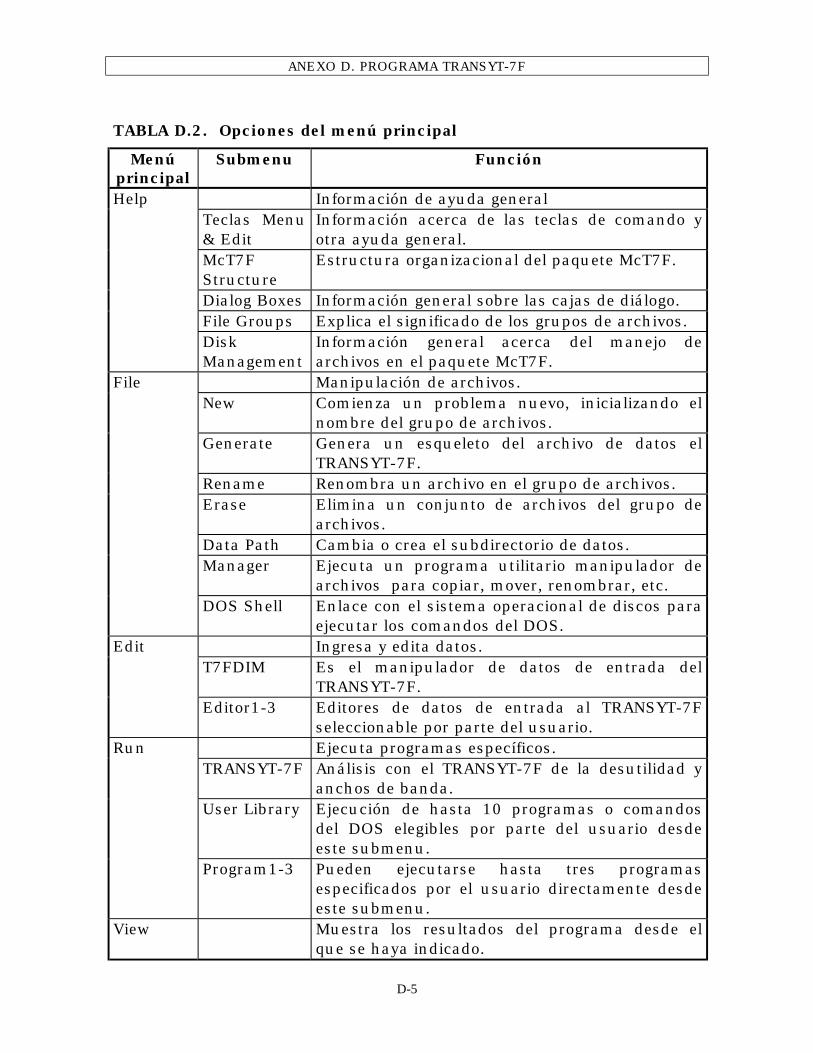
ANEXO D. PROGRAMA TRANSYT-7F
D-5
TABLA D.2. Opciones del menú principal
Menú principal
Submenu Función
Información de ayuda general Teclas Menu & Edit
Información acerca de las teclas de comando y otra ayuda general.
McT7F Structure
Estructura organizacional del paquete McT7F.
Dialog Boxes Información general sobre las cajas de diálogo. File Groups Explica el significado de los grupos de archivos.
Help
Disk Management
Información general acerca del manejo de archivos en el paquete McT7F.
Manipulación de archivos. New Comienza un problema nuevo, inicializando el
nombre del grupo de archivos. Generate Genera un esqueleto del archivo de datos el
TRANSYT-7F. Rename Renombra un archivo en el grupo de archivos. Erase Elimina un conjunto de archivos del grupo de
archivos. Data Path Cambia o crea el subdirectorio de datos. Manager Ejecuta un programa utilitario manipulador de
archivos para copiar, mover, renombrar, etc.
File
DOS Shell Enlace con el sistema operacional de discos para ejecutar los comandos del DOS.
Ingresa y edita datos. T7FDIM Es el manipulador de datos de entrada del
TRANSYT-7F.
Edit
Editor1-3 Editores de datos de entrada al TRANSYT-7F seleccionable por parte del usuario.
Ejecuta programas específicos. TRANSYT-7F Análisis con el TRANSYT-7F de la desutilidad y
anchos de banda. User Library Ejecución de hasta 10 programas o comandos
del DOS elegibles por parte del usuario desde este submenu.
Run
Program1-3 Pueden ejecutarse hasta tres programas especificados por el usuario directamente desde este submenu.
View Muestra los resultados del programa desde el que se haya indicado.

ANEXO D. PROGRAMA TRANSYT-7F
D-6
TRANSYT-7F Output
Se puede observar el informe de resultados.
TRANSYT-7F Input
Utiliza un programa para observar y editar el cual permite hacer cambios rápidos al archivo de entrada.
File List Muestra una lista de archivos existentes en el directorio de datos utilizado.
Permite la edición y almacenamiento de proyectos específicos, del informe de Bitácora de Ejecución y anotaciones.
Project
Report Observación y edición del Informe del Proyecto. Run Log Observación y edición de la Bitácora de
Ejecución. Notes Observación y edición de las Anotaciones en
tiempo real. Save Guarda el Informe del Proyecto con portada y
opcionalmente la Bitácora de Ejecución.
Reset Elimina el Informe, la Bitácora de Ejecución y/o las Anotaciones.
Imprime los resultados del programa desde el que se haya indicado.
TRANSYT-7F Output
Imprime el informe de resultados del programa.
PPD Ejecuta el programa de Diagrama de Progresión del Pelotón.
Report Imprime el Informe del Proyecto.
Notes Imprime el archivo de Anotaciones. Permite la edición de los parámetros del McT7F. System Establece las rutas específicas del sistema y los
valores por omisión.
Options
Printer Establece los controles de la impresora. Quit Sale del sistema McT7F. FUENTE: Universidad de Florida. Transportation Research Center. Federal Highway Administration. (1991). Guía del usuario del TRANSYT-7F. Gainesville. Florida. Estados Unidos de América.
D.3 APLICACIONES DEL TRANSYT-7F
D.3.1 Generalidades. Este capítulo tiene dos propósitos: introducir a los antecedentes de teoría de flujo de tránsito del TRANSYT-7F y su aplicación a la programación de tiempos de los semáforos, además, relacionar el flujo de tránsito y la programación de semáforos a los procesos utilizados por TRANSYT-7F. Las dos principales funciones del modelo TRANSYT-7F son
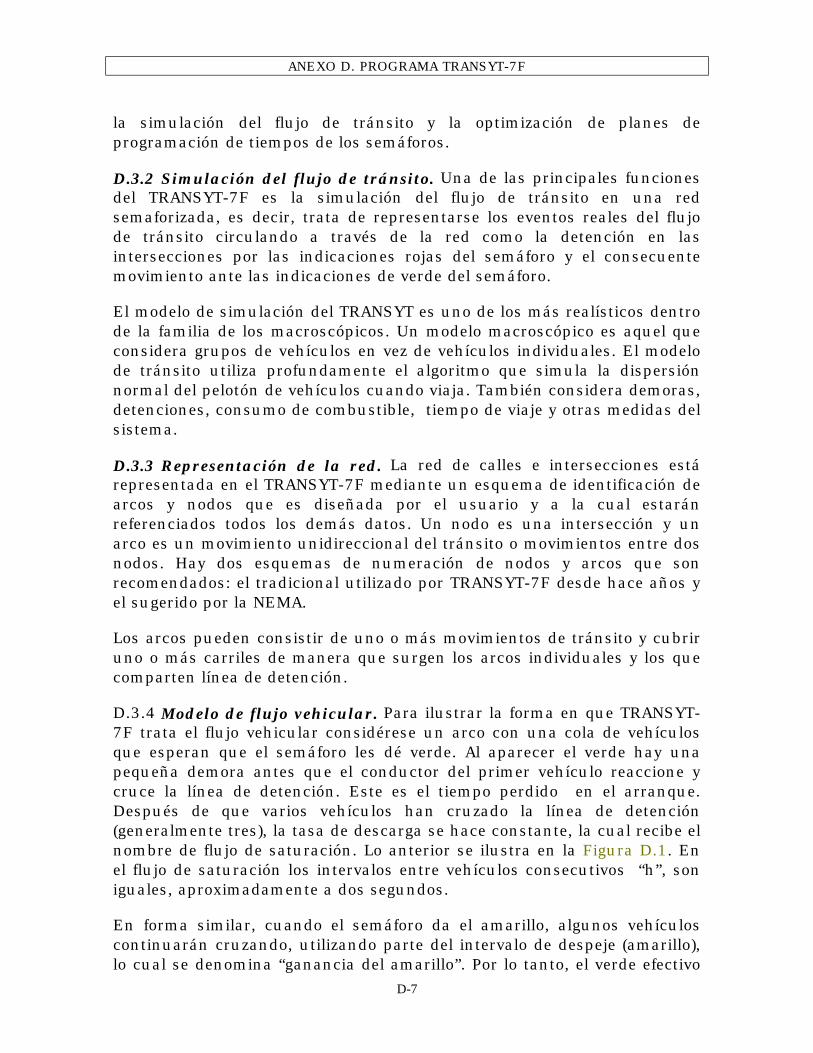
ANEXO D. PROGRAMA TRANSYT-7F
D-7
la simulación del flujo de tránsito y la optimización de planes de programación de tiempos de los semáforos.
D.3.2 Simulación del flujo de tránsito. Una de las principales funciones del TRANSYT-7F es la simulación del flujo de tránsito en una red semaforizada, es decir, trata de representarse los eventos reales del flujo de tránsito circulando a través de la red como la detención en las intersecciones por las indicaciones rojas del semáforo y el consecuente movimiento ante las indicaciones de verde del semáforo.
El modelo de simulación del TRANSYT es uno de los más realísticos dentro de la familia de los macroscópicos. Un modelo macroscópico es aquel que considera grupos de vehículos en vez de vehículos individuales. El modelo de tránsito utiliza profundamente el algoritmo que simula la dispersión normal del pelotón de vehículos cuando viaja. También considera demoras, detenciones, consumo de combustible, tiempo de viaje y otras medidas del sistema.
D.3.3 Representación de la red. La red de calles e intersecciones está representada en el TRANSYT-7F mediante un esquema de identificación de arcos y nodos que es diseñada por el usuario y a la cual estarán referenciados todos los demás datos. Un nodo es una intersección y un arco es un movimiento unidireccional del tránsito o movimientos entre dos nodos. Hay dos esquemas de numeración de nodos y arcos que son recomendados: el tradicional utilizado por TRANSYT-7F desde hace años y el sugerido por la NEMA.
Los arcos pueden consistir de uno o más movimientos de tránsito y cubrir uno o más carriles de manera que surgen los arcos individuales y los que comparten línea de detención.
D.3.4 Modelo de flujo vehicular. Para ilustrar la forma en que TRANSYT-7F trata el flujo vehicular considérese un arco con una cola de vehículos que esperan que el semáforo les dé verde. Al aparecer el verde hay una pequeña demora antes que el conductor del primer vehículo reaccione y cruce la línea de detención. Este es el tiempo perdido en el arranque. Después de que varios vehículos han cruzado la línea de detención (generalmente tres), la tasa de descarga se hace constante, la cual recibe el nombre de flujo de saturación. Lo anterior se ilustra en la Figura D.1. En el flujo de saturación los intervalos entre vehículos consecutivos “h”, son iguales, aproximadamente a dos segundos.
En forma similar, cuando el semáforo da el amarillo, algunos vehículos continuarán cruzando, utilizando parte del intervalo de despeje (amarillo), lo cual se denomina “ganancia del amarillo”. Por lo tanto, el verde efectivo

ANEXO D. PROGRAMA TRANSYT-7F
D-8
es igual al verde del semáforo menos el tiempo perdido en el arranque más la ganancia del amarillo, como se observa en la Figura D.1.
Dividiendo el verde efectivo en intervalos iguales y pequeños de tiempo, denominados “pasos”, el flujo vehicular se puede expresar en vehículos/paso, y se puede graficar en forma de histograma (Figura D.1, parte inferior), en este caso el histograma de partidas. Convirtiendo a vehículos/hora se obtiene el flujo de saturación (S), el cual indica el número de vehículos que puede cruzar la línea de detención en una hora si el acceso tuviera 100% de tiempo verde.
Debido a que el acceso tiene períodos de tiempo rojo, o que hay tiempos perdidos, y a que generalmente la demanda es menor que la capacidad, el número de vehículos que cruzan la línea de detención, será mucho menor que lo dado por el flujo de saturación. La capacidad es el máximo volumen, en veh/h, que puede cruzar, considerando el tiempo de rojo y/o tiempos perdidos; es diferente del flujo de saturación y comúnmente no se usa en TRANSYT-7F.
La cola que sale del arco se convierte en un pelotón en movimiento, que tiende a dispersarse a medida que avanza. La dispersión refleja la tendencia natural de los conductores a mantener brechas o espaciamientos de seguridad entre ellos. En la Figura D.2 se ilustra lo anterior.
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia.
FIGURA D.1. Representación simplificada del flujo vehicular que parte de una cola detenida ante una línea de detención.

ANEXO D. PROGRAMA TRANSYT-7F
D-9
En la Figura D.3 se muestran dos movimientos que salen del nodo 1, cada uno con un histograma de partidas aleatorias. El pelotón A se dispersa y mezcla con el B. El histograma superior del nodo 2 es el patrón de llegadas. El histograma inferior del nodo 2 es el patrón de partidas sobre el arco de salida de este nodo.
Considerando llegadas y partidas en el nodo 2, es evidente que la cola crece hasta que se da el verde al arco de llegada. La cola se descarga a flujo de saturación hasta que se disipa completamente. Para el tiempo verde efectivo que resta, el histograma de partidas es igual al de llegadas.
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia.
FIGURA D.2. Caso simple de dispersión de un pelotón de vehículos.
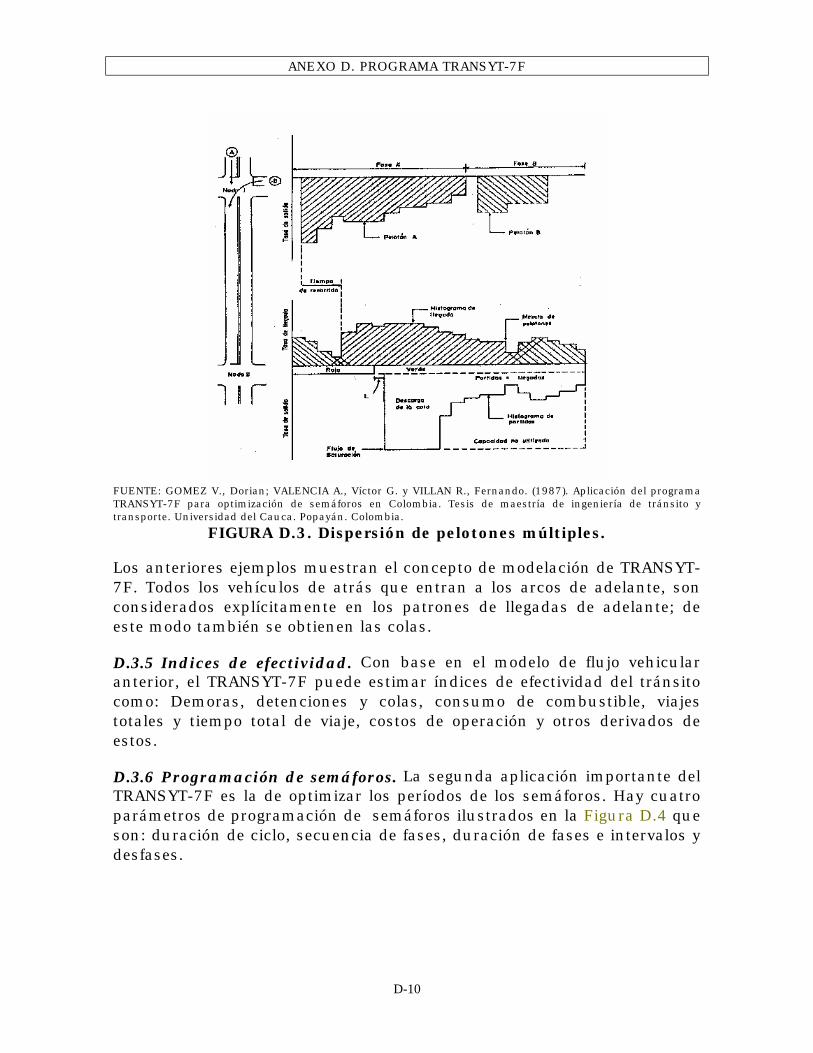
ANEXO D. PROGRAMA TRANSYT-7F
D-10
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia.
FIGURA D.3. Dispersión de pelotones múltiples.
Los anteriores ejemplos muestran el concepto de modelación de TRANSYT-7F. Todos los vehículos de atrás que entran a los arcos de adelante, son considerados explícitamente en los patrones de llegadas de adelante; de este modo también se obtienen las colas.
D.3.5 Indices de efectividad. Con base en el modelo de flujo vehicular anterior, el TRANSYT-7F puede estimar índices de efectividad del tránsito como: Demoras, detenciones y colas, consumo de combustible, viajes totales y tiempo total de viaje, costos de operación y otros derivados de estos.
D.3.6 Programación de semáforos. La segunda aplicación importante del TRANSYT-7F es la de optimizar los períodos de los semáforos. Hay cuatro parámetros de programación de semáforos ilustrados en la Figura D.4 que son: duración de ciclo, secuencia de fases, duración de fases e intervalos y desfases.
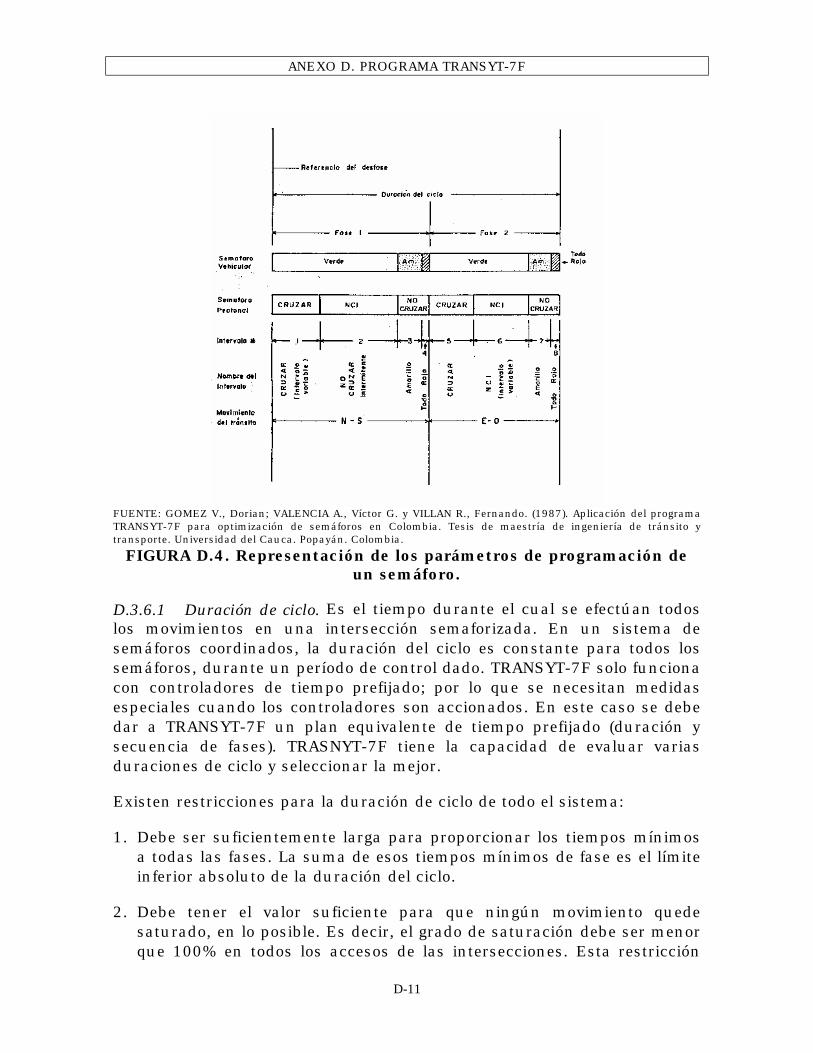
ANEXO D. PROGRAMA TRANSYT-7F
D-11
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia.
FIGURA D.4. Representación de los parámetros de programación de un semáforo.
D.3.6.1 Duración de ciclo. Es el tiempo durante el cual se efectúan todos los movimientos en una intersección semaforizada. En un sistema de semáforos coordinados, la duración del ciclo es constante para todos los semáforos, durante un período de control dado. TRANSYT-7F solo funciona con controladores de tiempo prefijado; por lo que se necesitan medidas especiales cuando los controladores son accionados. En este caso se debe dar a TRANSYT-7F un plan equivalente de tiempo prefijado (duración y secuencia de fases). TRASNYT-7F tiene la capacidad de evaluar varias duraciones de ciclo y seleccionar la mejor.
Existen restricciones para la duración de ciclo de todo el sistema:
1. Debe ser suficientemente larga para proporcionar los tiempos mínimos a todas las fases. La suma de esos tiempos mínimos de fase es el límite inferior absoluto de la duración del ciclo.
2. Debe tener el valor suficiente para que ningún movimiento quede saturado, en lo posible. Es decir, el grado de saturación debe ser menor que 100% en todos los accesos de las intersecciones. Esta restricción

ANEXO D. PROGRAMA TRANSYT-7F
D-12
conduce a duraciones de ciclo mayores que las dadas en la primera restricción.
3. No debe ser tan larga que cause demoras inaceptables.
4. Debe escogerse de manera que facilite la progresión del tránsito, en sistemas progresivos.
TRANSYT-7F también admite semáforos de doble ciclo, es decir, aquellos que operan con un ciclo igual a la mitad del ciclo del sistema.
D.3.6.2 Secuencia de fases. El ciclo puede componerse de 2 a 7 fases, dependiendo de los movimientos que requieran protección durante sus respectivos períodos verdes. Puede haber un máximo de seis fases para movimientos vehiculares, más una fase opcional exclusiva para peatones, lo cual no debe confundirse con el intervalo de rojo de despeje. La secuencia de fases puede consistir de una combinación de movimientos protegidos y no protegidos. El ingeniero de tránsito debe aplicar su juicio personal para definir las más prácticas y apropiadas para los semáforos en cuestión. TRANSYT-7F no selecciona la secuencia de fases; este es un dato de entrada.
D.3.6.3 Intervalos y duraciones de fase (reparto). La cantidad de tiempo otorgado a cada fase se llama duración de fase (reparto). Una fase se compone de dos o más intervalos. La distinción entre ambos términos es la siguiente:
1. Intervalo es el segmento de ciclo durante el cual las indicaciones del semáforo, tanto vehiculares como peatonales, no cambian.
2. Fase es la combinación de intervalos verde y amarillo durante la cual los movimientos con derecho a vía permanecen con dicho derecho. Si varios intervalos dan derecho a vía para peatones solamente, ésta también es una fase.
Así pues, una fase consiste en dos o más intervalos y se expresa generalmente en segundos o como porcentaje de la duración de ciclo. Las duraciones de fase (en vez de la duración de intervalos individuales) son optimizadas por TRANSYT, a pesar de esto, TRANSYT-7F da todas las duraciones de intervalos.
ANEXO D. PROGRAMA TRANSYT-7F
D-13
D.3.6.4 Desfases. Los desfases son el tiempo transcurrido entre un punto de referencia temporal y el inicio del ciclo en cada intersección del sistema. Generalmente se busca que los desfases permitan que el flujo vehicular circule con el menor número de paradas.
En TRANSYT-7F, un punto de cesión, en vez de desfase, se puede hacer referencia al inicio de cualquier intervalo distinto al primer intervalo del ciclo. Esto se hace con el fin de facilitar la representación de controladores semiaccionados. Los desfases (o los puntos de cesión) son optimizados por TRANSYT-7F.
D.3.7 Optimización de semáforos. TRANSYT-7F optimiza explícitamente las duraciones de fase y los desfases para una determinada duración de ciclo. Puede determinarse la mejor duración de ciclo mediante una evaluación sobre un rango de valores especificado por el usuario. Si se desea examinar secuencias de fases alternativas se necesita una serie de ejecuciones. TRANSYT-7F ha demostrado dar programaciones de tiempos de semáforos confiables.
D.3.7.1 Índice de servicio. Cuando se esta optimizando, TRANSYT-7F minimiza (o maximiza según la selección) una función objetivo denominada el índice de servicio (IS). El IS puede ser, o bien, una combinación lineal de demoras y detenciones, consumo de combustible y (opcionalmente) obstrucción máxima de cola por atrás; o exceso de costo de operación (también opcionalmente ponderado por obstrucción máxima de cola por atrás). Este índice de servicio es una “desutilidad” que es minimizada y que a menudo es referida como el “desempeño de la optimización”.
Otra opción es considerar las “oportunidades de progresión hacia adelante” (PROS), o bien, sola o en combinación con la función de desutilidad mencionada. Este índice de servicio es maximizado para incrementar la calidad de la progresión percibida. Los componentes del IS se definen adelante identificando las opciones.
D.3.7.1.1 Indice de desutilidad normalizado del TRANSYT-7F (ID). Este índice es una combinación lineal de demoras y detenciones así:
ID = [ Demora (veh/h) en un arco * un factor ponderador de demora específico del arco] + [ “penalización por detenciones” para todo el sistema * detenciones (veh/s) * factor de ponderación por detenciones específico del arco].
(1)
La “penalización por detenciones” establece la importancia relativa entre demoras y detenciones y es seleccionada por el usuario. Esta formulación
ANEXO D. PROGRAMA TRANSYT-7F
D-14
también puede especificarse de manera que los factores de ponderación sean iguales que aquellos del modelo de consumo de combustible. Esto resultará en un ID que explícitamente da el exceso de consumo de combustible.
D.3.7.1.2 Exceso de costos de operación. TRANSYT-7F puede estimar explícitamente el exceso de costo de operación (aunque el costo de operación total es entregado como un índice de efectividad). La formulación es algo similar a la de ID anterior pero se incorporan más factores y los coeficientes son diferentes.
D.3.7.1.3 Oportunidades de progresión. (PROS). La oportunidad de progresión hacia adelante se define como la habilidad mostrada en un punto dado en el tiempo para ingresar a una intersección en verde (incluyendo el periodo de cambio) y tener la expectativa de viajar a la velocidad de progresión deseada a través de la próxima intersección sin detenerse, independiente del otro tránsito.
Cada una de dichas oportunidades disponibles durante un periodo de tiempo dado (por ejemplo un “paso” en TRANSYT-7F) se agrega en tablas como una oportunidad de progresión. Las oportunidades múltiples, en tiempo y espacio, se acumulan como “PROS”.
El número de “PROS” en una dirección dada y para un periodo de tiempo dado (o paso) es el número de semáforos en verde sucesivos que podrían encontrarse a la velocidad de diseño sin detenerse. Las “PROS” agregadas se hallan mediante la suma de las PROS durante todos los periodos en ambas direcciones.
Un subconjunto del concepto de PROS es considerar solamente las PROS en cada dirección. La optimización de este subconjunto podría tener el efecto de una optimización del ancho de banda máximo.
D.3.7.1.4 Optimización de la función objetivo. La función objetivo en TRANSYT-7F puede ser definida por el usuario en varias formas. Una de las partes más importantes de la función objetivo es el ID definido mediante la ecuación (1). El ID puede especificarse de varias maneras, así:
[ ] [ ]coladeonPenalizaciprogresionconarendobleConteooperaciondetodeExceso
ecombustibldeconsumodeExcesoencionesyDemoras
ID ++
= cos
cos
det
Donde:

ANEXO D. PROGRAMA TRANSYT-7F
D-15
ID = uno de los indicadores de desutilidad definidos previamente. Si se necesita, uno de los tres dentro del primer corchete y opcionalmente los otros dos corchetes.
El IS puede ser definido como:
=
IDPROSIDyPROSPROSlasSolo
desutildaddeindiceelSolo
IS
/
Para las formulaciones, las PROS pueden ser ponderadas con respecto a cualquiera de los siguientes aspectos:
• PROS en arterias individuales y/o dirección, y
• PROS vs ID.
Como resultado de estas opciones se dispone un gran poder de definición del IS del TRANSYT-7F y se puede favorecer la desutilidad, la progresión, o una combinación de ambas.
D.3.7.1.5 Desfases y duraciones de fase. El TRANSYT-7F puede optimizar de manera explícita desfases y duraciones de fase para un ciclo dado. Debe indicarse si los desfases o las duraciones de fase o ambas serán optimizados en una ejecución particular. La metodología utilizada para la optimización se basa en la técnica de búsqueda gradiente.
La optimización de desfases y duraciones de fase puede restringirse para que una solución de ancho de banda inicial no pueda ser violada, con un ancho de banda directo dado en cada dirección sobre cada calle intersecada (limitada a cuatro accesos, en dos direcciones).
Por ejemplo si se usa un programa para el ancho de banda como el PASSER II o MAXBAND con el fin de obtener los desfases que maximicen la progresión hacia adelante percibida, las “coordenadas” de banda pueden ser ingresadas en el TRANSYT-7T y la optimización tratará de mejorar la operación de la red sin disminuir los anchos de banda hacia adelante prescritos.
El algoritmo denominado “restricción de ancho de banda” fue desarrollado por la FHWA. Ya que las coordenadas explícitas de la banda (es decir, los “desfases” en el principio y final de las bandas, asociadas a la base de referencia temporal del sistema general) deben ingresarse en este
ANEXO D. PROGRAMA TRANSYT-7F
D-16
procedimiento, solo puede usarse en una ejecución de optimización de ciclo único.
La Sección 4.5.5. puede ser consultada para conocer en detalle el procedimiento de optimización con restricción de ancho de banda.
D.3.7.1.6 Duración de ciclo. TRANSYT-7F evaluará un conjunto de duraciones de ciclo, ejecutando automáticamente una serie de corridas “rápidas” de optimización. La mejor duración de ciclo es la que produce el mejor IS (O sea el más bajo ID o el más alto PROS relacionado con el IS).
La función de evaluación de rango de ciclo no debería usarse para seleccionar la duración de ciclo del sistema en una sola ejecución. A cambio, úsela solamente para determinar un rango más estrecho de duraciones de ciclo para examinar con más detalle.
D.3.7.1.7 Secuencia de fases. Este es un dato de entrada al TRANSYT-7F. Para determinar la “mejor” secuencia de fases el usuario debe realizar varias corridas y seleccionar por si mismo la secuencia que produzca el menor IS.
D.3.7.2 Aplicaciones especiales. El TRANSYT-7F es un modelo extremadamente flexible. Se puede modelar una gran variedad de condiciones de tránsito y de modos de transporte no comunes.
D.3.7.2.1 Operación de buses. Los buses se modelan asignando los arcos especiales. Dichos arcos de buses pueden ser totalmente independientes o pueden compartir líneas de detención con arcos de autos a fin de simular el tránsito mezclado. También es posible tener en cuenta el tiempo habitual en las paradas de buses. Se puede dar prioridad a los buses aplicando elevados ponderadores individuales de arco para las demoras y/o detenciones (en semáforos, no en paraderos). TRANSYT-7F no puede modelar tratamientos de prioridad dinámicos de buses.
D.3.7.2.2 Carpules. Los carpules con carriles separados pueden modelarse en forma similar a los buses.
D.3.7.2.3 Flujos provenientes de media cuadra. Fuentes de tránsito como estacionamientos, centros comerciales, etc., pueden modelarse como flujos de entrada uniformes. El valor a usar debe ser el volumen total de salida de la fuente. TRANSYT toma en cuenta automáticamente las pérdidas de flujo que entran a tales sitios. Los flujos provenientes de media cuadra se deben modelar si contribuyen con un 10% o más al volumen total del arco.

ANEXO D. PROGRAMA TRANSYT-7F
D-17
D.3.7.2.4 Embotellamientos. Restricciones a media cuadra, tales como puentes, estacionamiento en la vía, etc. reducen la capacidad por debajo del flujo de saturación de los arcos de adelante. Estos embotellamientos se modelan como nodos ficticios o virtuales (es decir, no se les asigna número), y a los arcos correspondientes se les pone un 100% de tiempo verde. El flujo de saturación en los arcos afectados es especificado de manera apropiada, usualmente la capacidad del cuello de botella.
D.3.7.2.5 Control accionado. El TRANSYT-7F puede tratar directamente el control accionado. Ya que el modelo solo simula un ciclo de semáforo único, las duraciones de fase siempre son modeladas como “prefijado equivalentes”. Sin embargo, el cálculo de la duración promedio de las fases accionadas (si se solicitan) es ahora más realístico que en versiones anteriores.
D.3.7.2.6 Giros a izquierda permitidos. Se pueden modelar explícitamente los tratamientos de giros a izquierda permitidos (y permitidos más protegidos) y los “colados”.
D.3.7.2.7 Giros a derecha en rojo (RTOR). Estos movimientos se pueden modelar como los giros a izquierda permitidos mas protegidos. Las únicas diferencias prácticas son las codificaciones.
D.3.7.2.8 Operación de carril compartido. Siempre que un carril sea compartido por dos movimientos (es decir, izquierda y de frente o derecha y de frente), las dinámicas son muy complicadas. El TRANSYT-7F tiene un algoritmo que entrega una aproximación de las operaciones de carril compartido. También determina automáticamente cuando el carril compartido es probable de operar como un carril “de hecho” para giro a izquierda, según el Manual de Capacidad de Carreteras de los Estados Unidos de América.
D.3.7.2.9 Peatones y bicicletas. Pueden modelarse con arcos especiales, pero es más común no modelarlos por separado. Es mejor, cuando ellos requieran fases especiales, que se les asigne una fase exclusiva para los peatones sin movimientos vehiculares.
D.3.7.2.10 Nodos agrupados. Si dos o más intersecciones operan juntas y se desea mantener la relación del desfase entre ellas, los nodos se pueden agrupar. Sus aplicaciones más comunes son:
• Intersecciones a desnivel tipo diamante, por ejemplo con tiempos asignados por el PASSER II;

ANEXO D. PROGRAMA TRANSYT-7F
D-18
• Dos intersecciones muy cercanas, particularmente si están gobernadas por un solo controlador; o
• Varias intersecciones con tiempos asignados mediante otro método que se requiere que no interfiera TRANSYT-7F.
Se debe proveer la programación de tiempos (al menos los desfases) de los nodos agrupados y TRANSYT-7F los tratará así:
1. Sus diferencias de desfases se mantendrán fijas, aunque el desfase del grupo puede ser optimizado con el sistema.
2. Sus repartos de ciclo pueden ser optimizados, u opcionalmente mantenerse fijos.
D.3.7.2.11 Intersecciones reguladas por señales. Las intersecciones controladas con señales de “PARE” o “CEDA EL PASO” se pueden modelar como nodos con fases simples. La intersección se modela con todos los movimientos en la fase 1. En los arcos con señales, el flujo de saturación debe reducirse por debajo de lo normal si se ha observado en el campo que el tránsito de los arcos con señales afecta realmente los arcos sin señales (lo que puede afectar por ende las velocidades promedio crucero). Los flujos de saturación en los arcos con señales deben determinarse con medidas de campo o con otras estimaciones de capacidad.
D.4 EL MODELO TRANSYT-7F
D.4.1 Generalidades. El TRANSYT-7F es un modelo de optimización y simulación determinístico macroscópico. Este capítulo suministra detalles de los aspectos de modelación del programa, específicamente los submodelos de simulación y de optimización.
D.4.2 Descripción funcional. El programa FORTRAN del TRANSYT-7F tiene una construcción modular, con cada subprograma sirve una función específica. La estructura es la siguiente:
TRANSYT-7F Rutina principal
TRANSYT-7F Submodelos
Postprocesador de salidas
Preprocesador de datos
Submodelo de simulación
Submodelo de optimización
ANEXO D. PROGRAMA TRANSYT-7F
D-19
D.4.2.1 Preprocesador. La función principal es leer los datos de entrada, excepto las tarjetas de Resumen de Rutas y de Terminación, que son leídas por el postprocesador. Las entradas son procesadas tarjeta por tarjeta, luego por nodo y finalmente para todo el sistema como uno solo.
La segunda función principal del preprocesador es la de generar una serie de arcos tipo “árbol” que determinan el orden en el cual se simulan los arcos.
La tercera función principal es la de generar duraciones de fase del semáforo iniciales si no son suministrados en los datos. Un algoritmo genera estas duraciones de fase para el control prefijado basado en el equilibrio de los grados de saturación de los arcos críticos en conflicto. El segundo algoritmo calcula duraciones de fase “promedio” para controladores accionados, el cual reconoce la operación típica de una fase accionada; es decir, alcanzando un grado de saturación consistente. Ambos están sujetos a restricciones de duraciones de fase mínimas.
D.4.2.2 Submodelos. Esta sección del programa contiene el submodelo de simulación del tránsito y el de optimización.
La secuencia de eventos para una ejecución de optimización es generalmente como sigue:
1. El usuario codifica un plan de programación de tiempos del semáforo inicial, o el programa puede generar, si se necesita, desfases y duraciones de fase iniciales.
2. El modelo de tránsito simula el flujo de tránsito y calcula el índice de servicio (IS) para el plan de programación de tiempos del semáforo inicial.
3. El submodelo de optimización varía el desfase en el primer semáforo y llama al modelo de tránsito para recalcular el índice de servicio, IS. Continuará variando el desfase en este semáforo a medida que el IS se mejora.
4. El modelo procede secuencialmente a través de todos los semáforos para todas las variaciones de desfases y duraciones de fase ingresadas, intentando alcanzar un IS óptimo.

ANEXO D. PROGRAMA TRANSYT-7F
D-20
D.4.2.3 Postprocesador. La principal función del postprocesador es escribir los resultados. Adicionalmente, lee las tarjetas de Resumen de Ruta para permitir resúmenes de rutas y/o diagramas a ser impresos.
La salidas impresas son:
• Tabla de desempeño. Tiene todas los índices de efectividad (IEs).
• Programación del Controlador del Semáforo. El plan de programación de tiempos.
• Diagramas de Perfil de Flujo. Los perfiles de flujo de TRANSYT.
• Diagramas Tiempo-Espacio y Diagramas Tiempo-Localización,
• Informe Resumen de Ruta. Los IEs para los arcos seleccionados sobre una ruta.
El postprocesador también escribe un “archivo de datos gráficos” (o GDF) a petición del usuario conteniendo lo siguiente:
• Datos de flujo para el programa del Diagrama de Progresión de Pelotón (PPD).
• Datos de programación de tiempos que pueden ser usados por los programas AAP2NEMA y otros; y
• IEs de todo el sistema que son leídos por el programa T7FEX (así como el AAP) para la bitácora de ejecución.
D.4.3 Algoritmos computacionales. Esta sección detalla con mayor profundidad las metodologías computacionales introducidas en forma funcional en el Capítulo 3.
D.4.3.1 Flujo de tránsito. El TRANSYT simula el flujo de tránsito en forma macroscópica pero de manera progresiva. Como se dijo en el Capítulo 3, el ciclo está dividido en incrementos de igual tiempo denominados pasos. El paso típicamente va de 1 a 3 segundos, aunque la relación entre pasos y segundos no necesita ser una conversión entera. Sin embargo, la duración del paso será la resolución más fina con que será representada la programación de tiempos de los semáforos en el modelo de simulación. Entre más pequeño sea el tamaño del paso más fina será la resolución y los resultados serán más precisos.
Cada fase del semáforo esta identificada por sus tiempos de inicio y de terminación que serán modificados por el tiempo perdido en el arranque y
ANEXO D. PROGRAMA TRANSYT-7F
D-21
la extensión del verde para calcular el tiempo de “verde efectivo”. Ya que se conocen cuales arcos se pueden mover durante cada fase, es una manera simple (al menos para movimientos sin oposición) de construir los patrones de flujo de tránsito que se ilustraron en el Capítulo 3.
La condición sin oposición se explicará primero, luego la condición de movimiento con tránsito opuesto. Hay tres patrones de flujo de tránsito: el “IN” (Llegadas), “GO” (Salidas) y “OUT” (partidas). Antes de discutir estos en detalle se debería explicar el balance de flujo que hace TRANSYT.
D.4.3.1.1 Balance de flujo de tránsito. Cada arco puede ser alimentado hasta por cuatro arcos desde atrás. Típicamente serán tres pero el programa permite cuatro para casos especiales. Ya que los datos no se recogen simultáneamente en todas las intersecciones, la toma de datos por su naturaleza no es precisa y que el tránsito deja e ingresa a los arcos a mitad de cuadra, no es razonable esperar que los volúmenes de tránsito hacia adelante se equilibren exactamente con los de atrás. El TRANSYT-7F permite desviaciones en estos aforos aunque pueden identificarse grandes diferencias.
Es importante aclarar qué hace TRANSYT-7F respecto a estas diferencias. Considere el siguiente ejemplo numérico, donde los números son los datos codificados (el 50 es una fuente a mitad de cuadra):
➥ 200
➛ 500 ➦ 50 ➛ 1050
➦ 100
Claramente la sumatoria de las entradas desde atrás (200+500+100+50 = 850) no es la misma que el valor codificado hacia adelante (1050). TRANSYT-7F ajustará los flujos de esta manera:
1. El flujo corriente abajo (1050) y el flujo a mitad de cuadra (50) son considerados precisos. El flujo a mitad de cuadra se dedujo del flujo total (quedando 1000 vph).
2. Los flujos hacia atrás son ajustados proporcionalmente para igualar el flujo total corriente abajo, o:
200*(1000/800) = 250
500*(1000/800) = 625
100*(1000/800) = 125.
ANEXO D. PROGRAMA TRANSYT-7F
D-22
Lo que suma 1000 vph.
Estos volúmenes ajustados son los valores usados internamente por el programa. En algunos casos esto resulta en flujos de entrada que exceden el flujo de saturación codificado.
El programa revisa la magnitud del ajuste (bien sea por encima o por debajo) y si el ajuste es más grande que ciertos umbrales, se presenta o bien un error o una advertencia. Los volúmenes muy pequeños no son revisados, debido al requisito de volumen de tránsito mínimo de 10 vph.
Algunos preprocesadores, tal como el AAP, hacen flujos de arco a arco y su balance.
D.4.3.1.2 Patrón de llegadas del flujo. El patrón IN es el de llegadas, que son las llegadas a la línea de detención como si el tránsito no fuese impedido por el semáforo de adelante y se expresa matemáticamente como:
( )IN F P OUTit ij ij jtj
n
= •∑
Donde:
INit = el patrón IN en el arco i para el paso t;
Fij = proceso de suavización del flujo del arco i desde el arco j, el cual se discute con mayor detalle en la Subsección 4.3.3;
Pij = proporción del OUTjt que alimenta al arco i;
OUTjt = el patrón del arco j para el paso t, que se define abajo; y
n = el número de arcos (j) que alimenta al arco i.
El valor de INit, se calcula para cada paso, t, en el ciclo formando así un patrón o perfil como el que se muestra en la Figura D.5.
El patrón IN para los arcos externos (entrada a la red) o de entrada de flujos a mitad de cuadra siempre es una distribución uniforme. O sea, que las llegadas aleatorias tienden a “even out” sobre un periodo de tiempo. Para los arcos internos, el patrón IN está afectado por la dispersión del pelotón, tal como se trata en la Subsección sobre dispersión del pelotón.

ANEXO D. PROGRAMA TRANSYT-7F
D-23
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia.
FIGURA D.5. Perfiles de flujo de tránsito
D.4.3.1.3 El patrón de flujo de saturación. El patrón GO es la tasa de flujo en cada paso que podría dejar la línea de detención si hubiese suficiente tránsito para saturar el verde (ver Figura D.5). Esta tasa de flujo de saturación es una entrada dada por el usuario. Es importante saber que en TRANSYT, la cola se supone almacenada o apilada verticalmente en la línea de detención, o sea, que no se extiende hacia el nodo de atrás. Sin embargo, el modelo agrega realísticamente nuevas llegadas al final de la cola, aunque se este descargando.
Para los movimientos opuestos permitidos el patrón GO se calcula en forma diferente. Ver la Subsección sobre movimientos permitidos para los detalles.
Con anterioridad se ha hecho la distinción entre la tasa de flujo de saturación y la capacidad. La Figura D.5 ilustra esta diferencia. La tasa de flujo de saturación, expresada en vehículos por hora de verde (vphv) es la máxima tasa periódica posible, como se muestra en las dos versiones de la figura. La capacidad, al menos para arcos sin oposición es el producto

ANEXO D. PROGRAMA TRANSYT-7F
D-24
entre la tasa de flujo de saturación y el tiempo de verde efectivo, en vehículos por hora, y es el área completa dentro del rectángulo formado por el patrón GO y el verde efectivo. En la Figura D.5.A es el rectángulo debajo de la línea del tiempo. Este valor es un parámetro de salida de TRANSYT-7F.
Para los movimientos permitidos la capacidad se integra paso a paso para la duración del verde efectivo basado en la tasa de flujo periódica máxima que se dispone como función de tránsito en oposición e incluyendo los vehículos colados.
D.4.3.1.4 El patrón de partidas. El patrón OUT (partidas) es el perfil de tránsito real que abandona la línea de detención. Usualmente es igual al patrón GO (salidas) siempre que haya cola. Después que se disipa la cola, es igual al patrón IN (Llegadas) durante el verde efectivo. Los movimientos opuestos permitidos difieren un poco.
Para determinar el patrón OUT, la cola (o el número de vehículos que se mantiene en la línea de detención durante cualquier intervalo de tiempo, t) debe ser determinada primero por:
( ) ( )[ ]m max m q st t t t= + −−1 0,
Donde:
mt = número de vehículos en la cola en el intervalo de tiempo t en un arco dado (y en forma similar para mt-1);
qt = número de vehículos llegando en el intervalo t, dado por el patrón IN; y
st = número de vehículos permitidos a abandonar en el intervalo t, dado por el patrón GO.
Ya que TRANSYT simula el tránsito para un solo ciclo, la longitud de cola calculada representa solamente aquella que pudiese ocurrir debido al tránsito que llega durante el ciclo. Las colas no se construyen a lo largo del tiempo.
Entonces, el patrón OUT esta dado para el arco i durante el intervalo de tiempo t por la expresión:
OUT m q mit i t it it= + −−, 1

ANEXO D. PROGRAMA TRANSYT-7F
D-25
Donde todos los términos han sido definidos previamente (con el arco i para complementar).
D.4.3.1.5 Integración de patrones. Los tres patrones de flujo de tránsito se muestran en la Figura D.5, la parte superior de la figura muestra los perfiles separados para más fácil comprensión, mientras que en la parte inferior de la Figura muestra los perfiles en un cuadrante tal como son mostrados por el TRANSYT-7F. Se utilizan símbolos para graficar los patrones en la salida del TRANSYT-7F tal como se describe en el ejemplo.
D.4.3.2 Movimientos permitidos. El TRANSYT-7F tiene varias posibilidades de modelación de los movimientos permitidos [o sea, permitidos, o no protegidos, giros a izquierda, giros a derecha en rojo (RTOR); control con señales; etc.]. Los algoritmos son:
• Modelos de movimientos permitidos: ARRB, FHWA/TRC, Texas A & M, Minnesota, Ohio State y HCM.
• Colados.
• Control con señales.
• Modelación de carriles compartidos izquierda/directos.
D.4.3.3 Dispersión del pelotón. La operación que inicia y detiene los semáforos tiende a crear pelotones de vehículos que viajan a través del arco. TRANSYT modela la dispersión de estos pelotones a medida que ellos viajan a lo largo del arco. En el Aparte D.3 se ha tratado esto. La Figura D.6 se repite convenientemente la Figura D.2, con ciertos cambios para ilustrar más detalladamente los algoritmos de más adelante.
Para cada intervalo de tiempo (paso), t, el flujo que llega a la línea de detención de adelante (ignorando la presencia de una cola) se halla mediante la siguiente ecuación recurrente:
( )[ ]v F v F vt T t t T( ) ( )+′
+ −′= • + − •β β1 1
Donde:
v t T( )+′
β = Tasa de flujo predicha (en el intervalo de tiempo t+βT del pelotón predicho).
Vt = tasa de flujo del pelotón inicial durante el paso t;
β = un factor empírico, generalmente 0,8;
T = el tiempo de viaje crucero en el arco; y
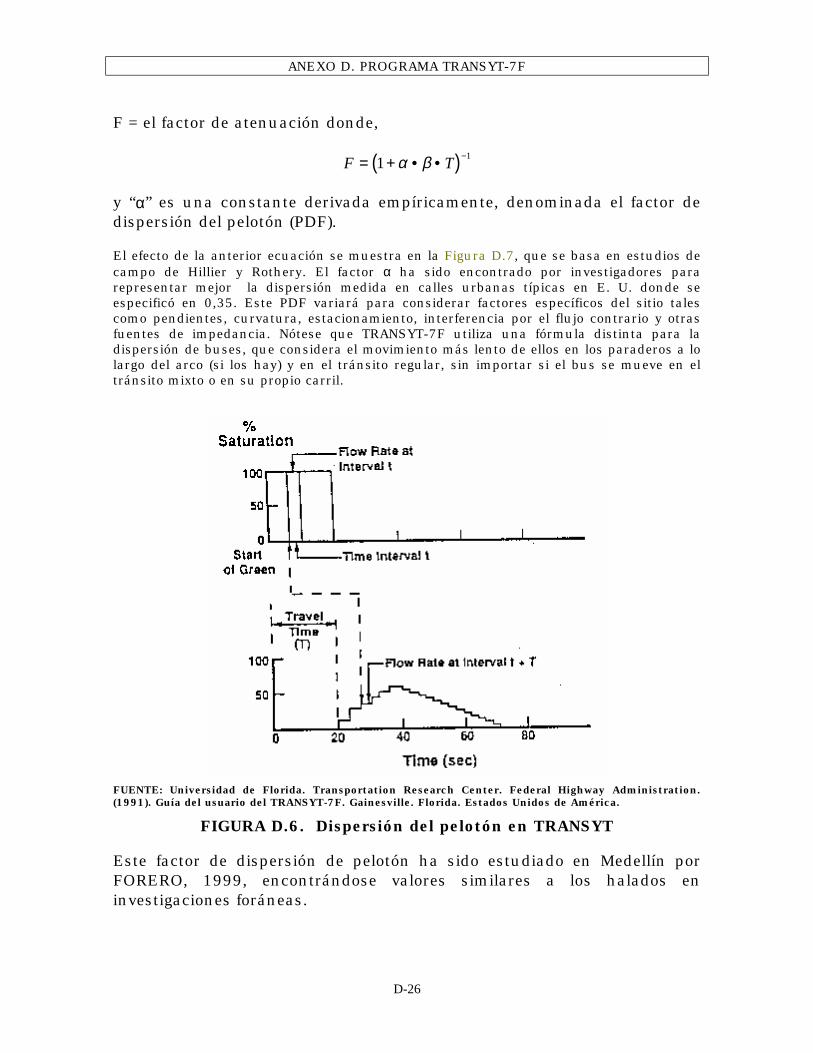
ANEXO D. PROGRAMA TRANSYT-7F
D-26
F = el factor de atenuación donde,
( )F T= + • • −1 1α β
y “α” es una constante derivada empíricamente, denominada el factor de dispersión del pelotón (PDF).
El efecto de la anterior ecuación se muestra en la Figura D.7, que se basa en estudios de campo de Hillier y Rothery. El factor α ha sido encontrado por investigadores para representar mejor la dispersión medida en calles urbanas típicas en E. U. donde se especificó en 0,35. Este PDF variará para considerar factores específicos del sitio tales como pendientes, curvatura, estacionamiento, interferencia por el flujo contrario y otras fuentes de impedancia. Nótese que TRANSYT-7F utiliza una fórmula distinta para la dispersión de buses, que considera el movimiento más lento de ellos en los paraderos a lo largo del arco (si los hay) y en el tránsito regular, sin importar si el bus se mueve en el tránsito mixto o en su propio carril.
FUENTE: Universidad de Florida. Transportation Research Center. Federal Highway Administration. (1991). Guía del usuario del TRANSYT-7F. Gainesville. Florida. Estados Unidos de América.
FIGURA D.6. Dispersión del pelotón en TRANSYT
Este factor de dispersión de pelotón ha sido estudiado en Medellín por FORERO, 1999, encontrándose valores similares a los halados en investigaciones foráneas.

ANEXO D. PROGRAMA TRANSYT-7F
D-27
FUENTE: Universidad de Florida. Transportation Research Center. Federal Highway Administration. (1991). Guía del usuario del TRANSYT-7F. Gainesville. Florida. Estados Unidos de América.
FIGURA D.7. Factor de dispersión del pelotón como función del tiempo de viaje
D.4.3.3.1 Indice de agrupamiento del pelotón. Hay varios otros aspectos de los perfiles de flujo que son de interés. El primero es el índice de agrupamiento del pelotón definido así:
Indice de agrupamiento del pelotonv v
C v
t
C
=−
•
∑
Donde:
Índice de agrupamiento del pelotón = es una medida de la desviación de la tasa de flujo periódica respecto a la tasa de flujo promedio en todo el ciclo;
vt= tasa de flujo en el paso t;
v = tasa de flujo promedio para el ciclo; y
C = duración del ciclo en pasos.
El índice de agrupamiento del pelotón es una salida del programa. Es un valor entre 0,0 y 2,0. Un flujo perfectamente uniforme podría tener un índice de cero, ya que no hay variación. Un valor alto del índice de agrupamiento del pelotón indica que el tránsito viaja en racimos y sugiere que tales arcos se beneficiarán por la coordinación. Los arcos con valores del índice de agrupamiento del pelotón bajos pueden ser adecuados para localizar secciones de frontera, si es necesario dividir la red.
D.4.3.3.2 Porcentaje de vehículos que llegan en verde. Una medida importante utilizada en el análisis de capacidad, incluyendo al HCM, es el porcentaje

ANEXO D. PROGRAMA TRANSYT-7F
D-28
de vehículos que llegan en verde (PVG). Tal como se definió en la ecuación (9-4) del Manual de Capacidad de Carreteras de los Estados Unidos de América (TRANSPORTATION RESEARCH BOARD, 1985), el PVG es el “porcentaje de todos los vehículos en el movimiento (en este caso un arco) que llegan en la fase verde”. El TRANSYT-7F relaciona las llegadas en verde y rojo, utiliza la siguiente relación en lugar del verde efectivo a duración de ciclo:
PTGPVGR p = . Ecuación (9.4) del HCM.
Donde:
Rp = Razón de pelotón
PTG = Porcentaje del ciclo que esta en verde para el movimiento particular; PTG = (g/c)*100.
g = Duración de verde para el movimiento (segundos)
c = duración del ciclo (segundos)
PVG = vg/v
Donde:
vg= volumen que llega durante el verde efectivo, medido a través de perfil de flujo, y
v = volumen total.
El PVG se informa junto al índice de agrupamiento del pelotón en los Diagramas de Perfil de Flujo.
D.4.3.3.3 Parámetros de sensibilidad. Ya que el TRANSYT-7F se basa en el TRANSYT/7, ofrece una mejora significante sobre las versiones anteriores del TRANSYT en términos de tiempo de ejecución en computador. Esto se debe a la adición del parámetro de sensibilidad. Este afecta la “distancia” a lo largo de la cual los cambios en los perfiles de flujo de los arcos de atrás serán propagados hacia los de adelante.
Cada vez que se cambie el desfase de un semáforo o la duración de fase, el cambio afecta los patrones OUT y por ende los patrones de llegada a las intersecciones de adelante. En las versiones anteriores del TRANSYT (antes del TRANSYT/7) este efecto se propagó a lo largo de la red en cada iteración. Claramente, el efecto propagado por un cambio en un solo nodo

ANEXO D. PROGRAMA TRANSYT-7F
D-29
no necesariamente puede extenderse más allá de tal nodo, quizá tan lejos como uno o dos nodos más.
Para cada arco el patrón OUT se almacena como una tasa de flujo para cada incremento de tiempo (paso), t. Esto puede representarse por xt. En forma similar el patrón OUT puede calcularse después de un cambio de la programación de tiempos mediante x´t. Estos perfiles se muestran en el ejemplo de la Figura D.8. El cambio en los perfiles entre la programación de tiempos anterior (xt) y la revisada (x´t) se halla con:
dx x
xxt t
tt
=− ′
∑
FUENTE: Universidad de Florida. Transportation Research Center. Federal Highway Administration. (1991). Guía del usuario del TRANSYT-7F. Gainesville. Florida. Estados Unidos de América. FIGURA D.8 Perfiles de flujo de partidas antes y después de un cambio
en la programación del semáforo del nodo de atrás
Se debe comparar el valor calculado, dx, que representa el grado de cambio en los perfiles (expresado en porcentaje), con el parámetro de sensitividad. Cuando dx es más grande que el parámetro de sensitividad en cuestión, se calculan perfiles nuevos para el arco próximo de adelante. Si es más pequeño, el cambio en el perfil se considera despreciable y la propagación a lo largo de esta ramificación del arco se termina.
Los parámetros de sensitividad pueden, o bien, ser codificados o el TRANSYT-7F puede suministrarlos internamente.

ANEXO D. PROGRAMA TRANSYT-7F
D-30
D.4.3.4 Indicadores de efectividad (IE). A continuación se describe cómo el TRANSYT-7F estima estos indicadores de efectividad.
D.4.3.4.1 Demoras. Uno de los indicadores de efectividad (IE) más importantes son las demoras de los vehículos en el sistema. Estas indican los costos indirectos por tiempos perdidos y los costos directos por consumo inoficioso de combustible. Las demoras excesivas reflejan la ineficiencia de la programación de semáforos. La Figura D.9 muestra que la demora es la cantidad de vehículos en cola por el periodo de tiempo en cola de cada uno.
TRANSYT-7F puede aproximar uno de tales histogramas (perfil de flujo) y solo uno. Se conoce que existen variaciones en las llegadas de un ciclo a otro, de manera que se toma en cuenta algo de aleatoriedad, particularmente cerca o en la saturación, donde el efecto es mucho más severo.
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia.
FIGURA D.9. Medición típica de las demoras
El TRANSYT utiliza una estimación de demoras que combina estos principios. Considere la Figura D.10 la cual muestra las trayectorias de tres vehículos a través de una serie de intersecciones. El vehículo 1 no experimenta demora, y los vehículos 2 y 3 tienen igual demora, a pesar de que experimentan un número diferente de detenciones. De este modo, para una misma cantidad de demora pueden existir diferentes números de paradas. Esta particularidad es importante cuando se estima la cantidad de combustible. La Figura D.10 también muestra que: es la cantidad de tiempo total perdido por no circular a la velocidad libre prevaleciente. Como se dijo, TRANSYT no obtiene las trayectorias de vehículos individuales, pero puede estimar las demoras macroscópicamente a partir de los histogramas de flujo.
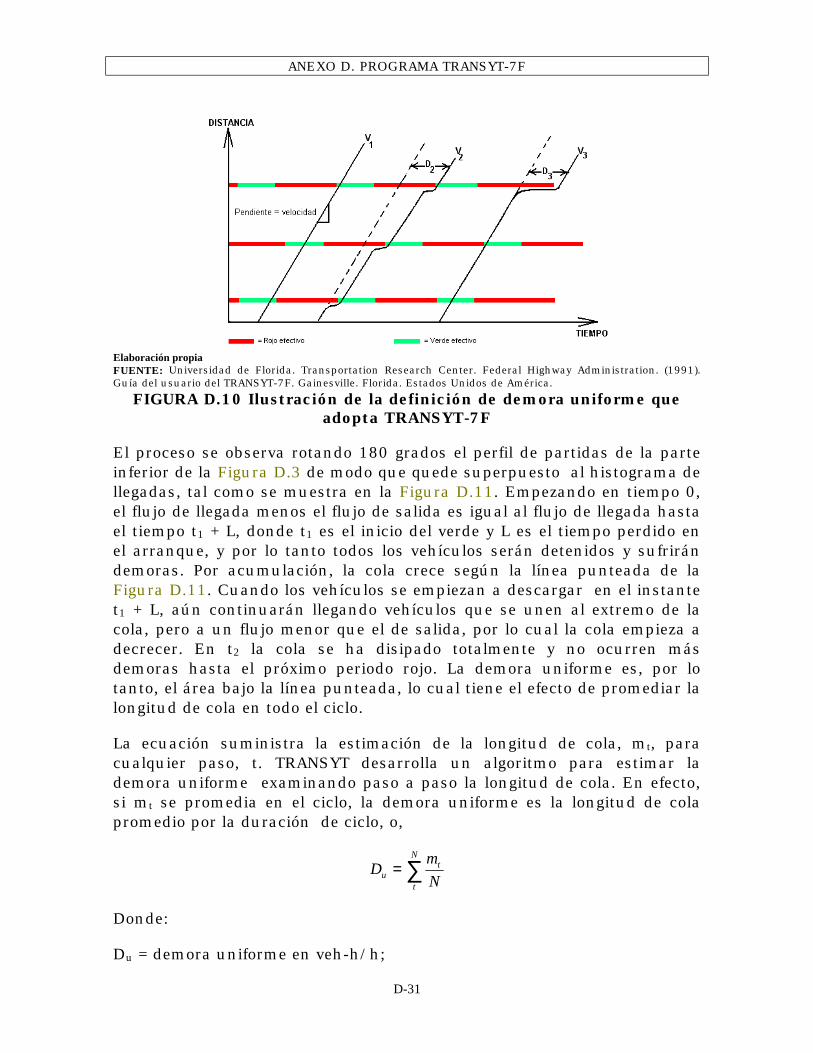
ANEXO D. PROGRAMA TRANSYT-7F
D-31
Elaboración propia FUENTE: Universidad de Florida. Transportation Research Center. Federal Highway Administration. (1991). Guía del usuario del TRANSYT-7F. Gainesville. Florida. Estados Unidos de América.
FIGURA D.10 Ilustración de la definición de demora uniforme que adopta TRANSYT-7F
El proceso se observa rotando 180 grados el perfil de partidas de la parte inferior de la Figura D.3 de modo que quede superpuesto al histograma de llegadas, tal como se muestra en la Figura D.11. Empezando en tiempo 0, el flujo de llegada menos el flujo de salida es igual al flujo de llegada hasta el tiempo t1 + L, donde t1 es el inicio del verde y L es el tiempo perdido en el arranque, y por lo tanto todos los vehículos serán detenidos y sufrirán demoras. Por acumulación, la cola crece según la línea punteada de la Figura D.11. Cuando los vehículos se empiezan a descargar en el instante t1 + L, aún continuarán llegando vehículos que se unen al extremo de la cola, pero a un flujo menor que el de salida, por lo cual la cola empieza a decrecer. En t2 la cola se ha disipado totalmente y no ocurren más demoras hasta el próximo periodo rojo. La demora uniforme es, por lo tanto, el área bajo la línea punteada, lo cual tiene el efecto de promediar la longitud de cola en todo el ciclo.
La ecuación suministra la estimación de la longitud de cola, mt, para cualquier paso, t. TRANSYT desarrolla un algoritmo para estimar la demora uniforme examinando paso a paso la longitud de cola. En efecto, si mt se promedia en el ciclo, la demora uniforme es la longitud de cola promedio por la duración de ciclo, o,
D mNu
t
t
N
= ∑
Donde:
Du = demora uniforme en veh-h/h;
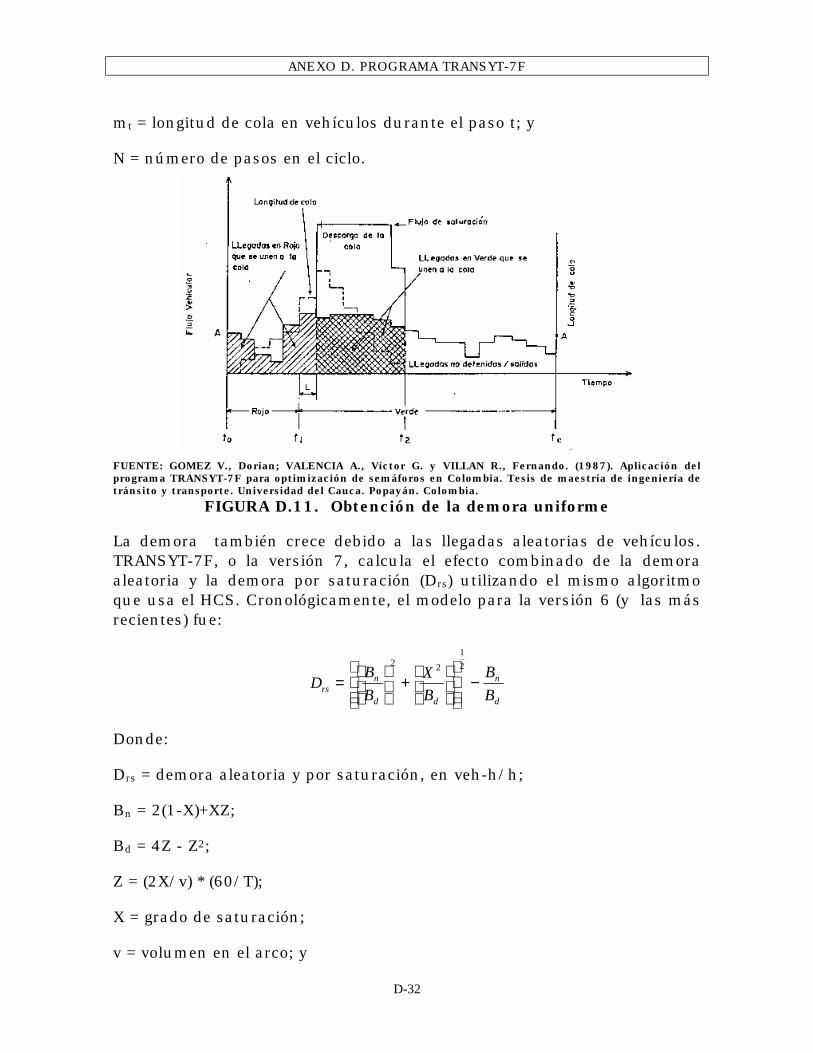
ANEXO D. PROGRAMA TRANSYT-7F
D-32
mt = longitud de cola en vehículos durante el paso t; y
N = número de pasos en el ciclo.
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia.
FIGURA D.11. Obtención de la demora uniforme
La demora también crece debido a las llegadas aleatorias de vehículos. TRANSYT-7F, o la versión 7, calcula el efecto combinado de la demora aleatoria y la demora por saturación (Drs) utilizando el mismo algoritmo que usa el HCS. Cronológicamente, el modelo para la versión 6 (y las más recientes) fue:
DBB
XB
BBrs
n
d d
n
d
=
+
−2 2
12
Donde:
Drs = demora aleatoria y por saturación, en veh-h/h;
Bn = 2(1-X)+XZ;
Bd = 4Z - Z2;
Z = (2X/v) * (60/T);
X = grado de saturación;
v = volumen en el arco; y

ANEXO D. PROGRAMA TRANSYT-7F
D-33
T = duración del periodo, normalmente 60 minutos para condiciones no saturadas.
Un modelo funcionalmente similar originario de Australia adoptado por el HCM (y entonces por el HCS) es el siguiente:
( ) ( )D TX X X XcT vrs = − + − +
•
900 1 1 4 36002 2
12
Donde:
c = capacidad en veh/h, o c = sg/C.
Todos los demás términos se han definido anteriormente.
Este es el modelo de demoras aleatorias y por saturación considerado por omisión en el TRANSYT-7F (versión 7), aunque la versión más vieja todavía puede aplicarse si se desea.
La demora total en veh-h/h, D, se calcula:
D D Du rs= +
Cuando las demoras uniforme y aleatoria con la de saturación se trazan, resulta la curva de la Figura D.12. Como puede observarse, la demora total se incrementa rápidamente cuando se satura un arco, y esta condición influirá fuertemente a los IE estimados, incluyendo el consumo de combustible. Tales demoras altas deberían ser vistas como estimaciones burdas en las mejores circunstancias.
Es importante reiterar que TRANSYT simula solamente un ciclo de semáforo. Entonces el modelo supone que el control prefijado se repite y los resultados de IE deberían considerarse como promedios en el periodo de análisis. El control accionado se trata como control prefijado equivalente, pero, con el cálculo de duraciones de fase (“repartos”) mejorado para reflejar el control accionado mejor que las versiones anteriores a la versión 6 del TRANSYT-7F.
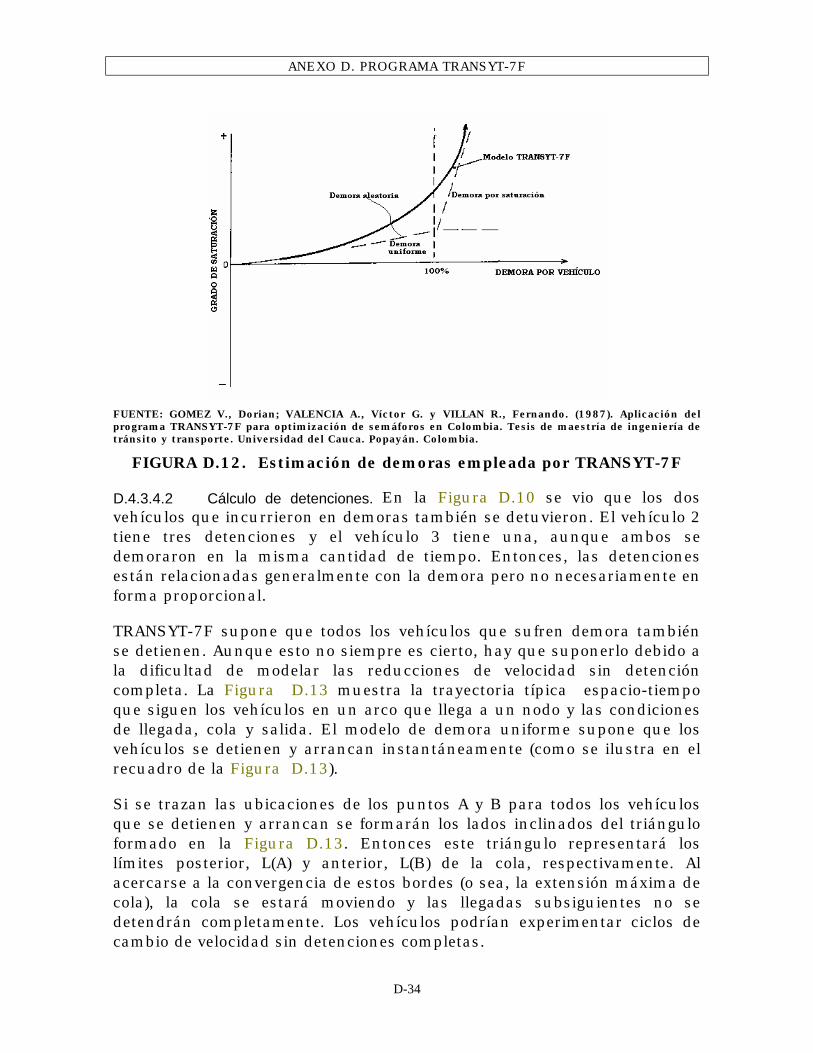
ANEXO D. PROGRAMA TRANSYT-7F
D-34
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia.
FIGURA D.12. Estimación de demoras empleada por TRANSYT-7F
D.4.3.4.2 Cálculo de detenciones. En la Figura D.10 se vio que los dos vehículos que incurrieron en demoras también se detuvieron. El vehículo 2 tiene tres detenciones y el vehículo 3 tiene una, aunque ambos se demoraron en la misma cantidad de tiempo. Entonces, las detenciones están relacionadas generalmente con la demora pero no necesariamente en forma proporcional.
TRANSYT-7F supone que todos los vehículos que sufren demora también se detienen. Aunque esto no siempre es cierto, hay que suponerlo debido a la dificultad de modelar las reducciones de velocidad sin detención completa. La Figura D.13 muestra la trayectoria típica espacio-tiempo que siguen los vehículos en un arco que llega a un nodo y las condiciones de llegada, cola y salida. El modelo de demora uniforme supone que los vehículos se detienen y arrancan instantáneamente (como se ilustra en el recuadro de la Figura D.13).
Si se trazan las ubicaciones de los puntos A y B para todos los vehículos que se detienen y arrancan se formarán los lados inclinados del triángulo formado en la Figura D.13. Entonces este triángulo representará los límites posterior, L(A) y anterior, L(B) de la cola, respectivamente. Al acercarse a la convergencia de estos bordes (o sea, la extensión máxima de cola), la cola se estará moviendo y las llegadas subsiguientes no se detendrán completamente. Los vehículos podrían experimentar ciclos de cambio de velocidad sin detenciones completas.
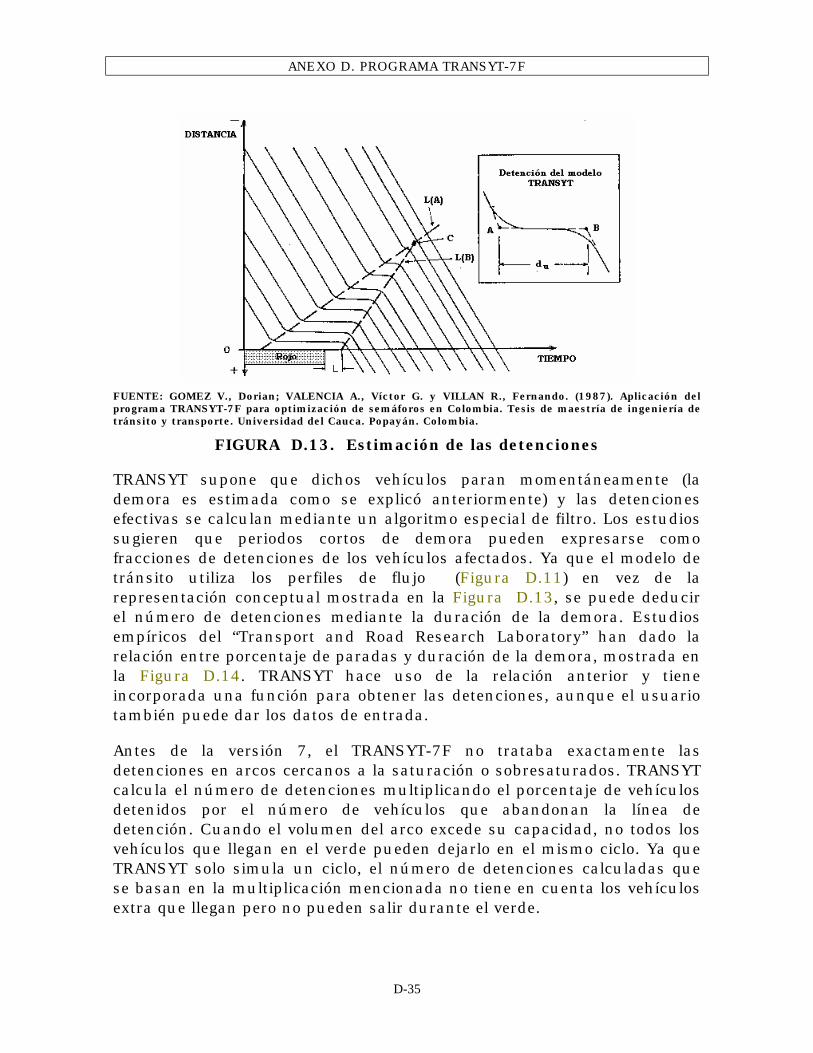
ANEXO D. PROGRAMA TRANSYT-7F
D-35
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia.
FIGURA D.13. Estimación de las detenciones
TRANSYT supone que dichos vehículos paran momentáneamente (la demora es estimada como se explicó anteriormente) y las detenciones efectivas se calculan mediante un algoritmo especial de filtro. Los estudios sugieren que periodos cortos de demora pueden expresarse como fracciones de detenciones de los vehículos afectados. Ya que el modelo de tránsito utiliza los perfiles de flujo (Figura D.11) en vez de la representación conceptual mostrada en la Figura D.13, se puede deducir el número de detenciones mediante la duración de la demora. Estudios empíricos del “Transport and Road Research Laboratory” han dado la relación entre porcentaje de paradas y duración de la demora, mostrada en la Figura D.14. TRANSYT hace uso de la relación anterior y tiene incorporada una función para obtener las detenciones, aunque el usuario también puede dar los datos de entrada.
Antes de la versión 7, el TRANSYT-7F no trataba exactamente las detenciones en arcos cercanos a la saturación o sobresaturados. TRANSYT calcula el número de detenciones multiplicando el porcentaje de vehículos detenidos por el número de vehículos que abandonan la línea de detención. Cuando el volumen del arco excede su capacidad, no todos los vehículos que llegan en el verde pueden dejarlo en el mismo ciclo. Ya que TRANSYT solo simula un ciclo, el número de detenciones calculadas que se basan en la multiplicación mencionada no tiene en cuenta los vehículos extra que llegan pero no pueden salir durante el verde.
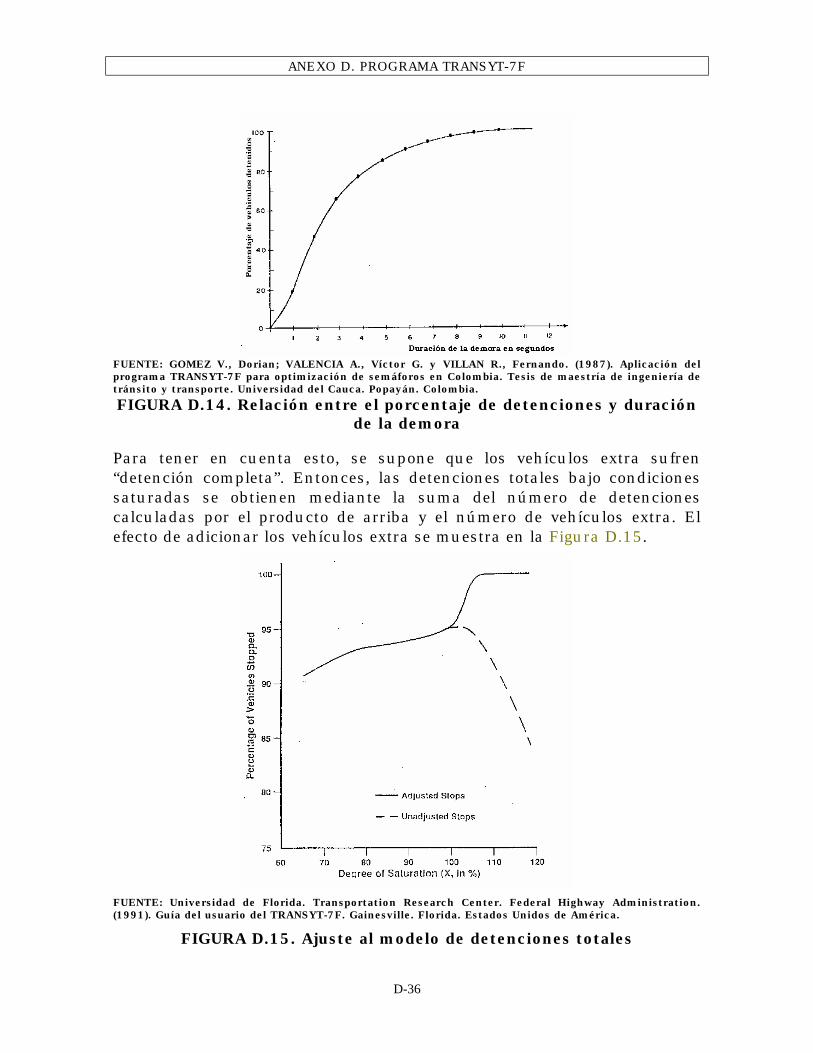
ANEXO D. PROGRAMA TRANSYT-7F
D-36
FUENTE: GOMEZ V., Dorian; VALENCIA A., Víctor G. y VILLAN R., Fernando. (1987). Aplicación del programa TRANSYT-7F para optimización de semáforos en Colombia. Tesis de maestría de ingeniería de tránsito y transporte. Universidad del Cauca. Popayán. Colombia. FIGURA D.14. Relación entre el porcentaje de detenciones y duración
de la demora
Para tener en cuenta esto, se supone que los vehículos extra sufren “detención completa”. Entonces, las detenciones totales bajo condiciones saturadas se obtienen mediante la suma del número de detenciones calculadas por el producto de arriba y el número de vehículos extra. El efecto de adicionar los vehículos extra se muestra en la Figura D.15.
FUENTE: Universidad de Florida. Transportation Research Center. Federal Highway Administration. (1991). Guía del usuario del TRANSYT-7F. Gainesville. Florida. Estados Unidos de América.
FIGURA D.15. Ajuste al modelo de detenciones totales
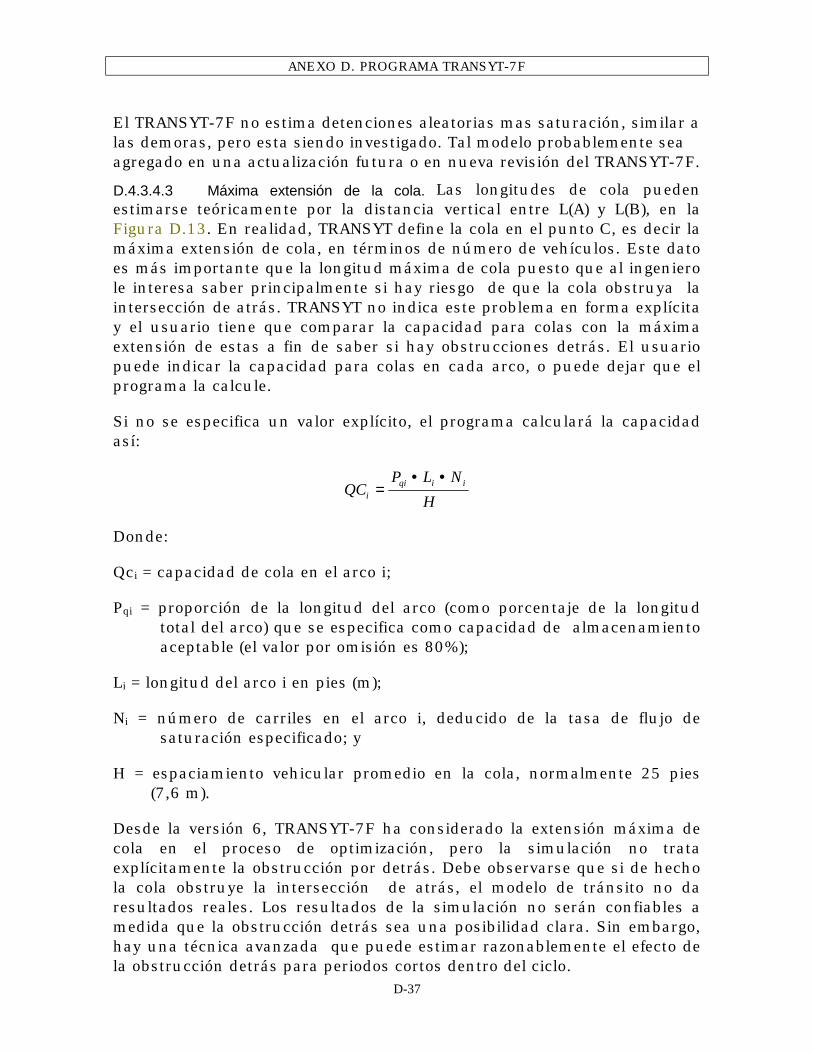
ANEXO D. PROGRAMA TRANSYT-7F
D-37
El TRANSYT-7F no estima detenciones aleatorias mas saturación, similar a las demoras, pero esta siendo investigado. Tal modelo probablemente sea agregado en una actualización futura o en nueva revisión del TRANSYT-7F.
D.4.3.4.3 Máxima extensión de la cola. Las longitudes de cola pueden estimarse teóricamente por la distancia vertical entre L(A) y L(B), en la Figura D.13. En realidad, TRANSYT define la cola en el punto C, es decir la máxima extensión de cola, en términos de número de vehículos. Este dato es más importante que la longitud máxima de cola puesto que al ingeniero le interesa saber principalmente si hay riesgo de que la cola obstruya la intersección de atrás. TRANSYT no indica este problema en forma explícita y el usuario tiene que comparar la capacidad para colas con la máxima extensión de estas a fin de saber si hay obstrucciones detrás. El usuario puede indicar la capacidad para colas en cada arco, o puede dejar que el programa la calcule.
Si no se especifica un valor explícito, el programa calculará la capacidad así:
QCP L N
Hiqi i i=
• •
Donde:
Qci = capacidad de cola en el arco i;
Pqi = proporción de la longitud del arco (como porcentaje de la longitud total del arco) que se especifica como capacidad de almacenamiento aceptable (el valor por omisión es 80%);
Li = longitud del arco i en pies (m);
Ni = número de carriles en el arco i, deducido de la tasa de flujo de saturación especificado; y
H = espaciamiento vehicular promedio en la cola, normalmente 25 pies (7,6 m).
Desde la versión 6, TRANSYT-7F ha considerado la extensión máxima de cola en el proceso de optimización, pero la simulación no trata explícitamente la obstrucción por detrás. Debe observarse que si de hecho la cola obstruye la intersección de atrás, el modelo de tránsito no da resultados reales. Los resultados de la simulación no serán confiables a medida que la obstrucción detrás sea una posibilidad clara. Sin embargo, hay una técnica avanzada que puede estimar razonablemente el efecto de la obstrucción detrás para periodos cortos dentro del ciclo.

ANEXO D. PROGRAMA TRANSYT-7F
D-38
D.5 DATOS DE ENTRADA NECESARIOS
Según GOMEZ Y OTROS, 1987, los datos requeridos por TRANSYT-7F se agrupan en cuatro categorías generales:
D.5.1 Datos de la red. Estos datos describen la red en términos de intersecciones (nodos) y calles (arcos). El usuario debe definir la red entera como un sistema de nodos y arcos.
D.5.2 Parámetros de programación de semáforos. Los parámetros de programación de semáforos de tránsito son duración de ciclo, duración de intervalos de cada fase, secuencias de fases, duraciones mínimas de fases y desfases.
D.5.3 Datos geométricos y de tránsito. Estos datos comprenden longitudes de arcos, flujos de saturación, velocidades medias de crucero, demoras por parada de bus en paraderos y volúmenes de tránsito (incluyendo los flujos de arco a arco).
D.5.4 Datos de control. Los datos de control indican aquellas operaciones que los usuarios desean que el programa haga (por ejemplo, simulación u optimización, leer unidades inglesas o métricas, etc.). Además, hay una variedad de parámetros que afectan la simulación u optimización. Finalmente las rutinas de diagramas de perfil de flujo y diagramas espacio-tiempo requieren información sobre los aros que van a ser incluidos en ellos.
D.5.5 Toma de datos. Los estudios de campo requeridos son estudios de ingeniería de tránsito convencionales ejecutados habitualmente por la mayoría de los ingenieros. Los datos que necesita TRANSYT-7F comprenden información que pueden tomarse en tablas preparadas por ingenieros de tránsito o de datos tomados en el campo.
Se necesitan datos sobre características del tránsito para cada período en que se aplique un plan diferente a un sistema de semáforos. En un sistema típico de tres períodos, con semáforos de tiempos prefijados, dos de ellos suelen ser para los periodos picos de la mañana y de la tarde y el otro para periodos no pico. Si el sistema tiene capacidad suficiente para planes adicionales, se necesitarán datos de tránsito para estos otros periodos.
D.5.5.1 Datos de la red. Cinco tipos de datos son necesarios para la red: un sistema de identificación para las intersecciones, un sistema de identificación para los accesos y, en algunos casos especiales, para

ANEXO D. PROGRAMA TRANSYT-7F
D-39
movimientos individuales, distancias entre intersecciones, las restricciones de estacionamiento, tiempo de estacionamiento, y rutas de buses.
La red se debe representar con un sistema de nodos y arcos, identificados mediante números. Los nodos son, físicamente, las intersecciones de la red que pueden ser semaforizadas o reguladas por señal de “PARE” o “CEDA EL PASO”. Un nodo también puede representar una estrangulación (“Embotellamientos”).
Los arcos por su parte, representan un segmento unidireccional de vía que conecta dos nodos y deben tener un volumen horario mínimo de 10 vehículos. Para la modelación se asigna un arco a cada corriente vehicular homogénea existente en el tramo; con ello es posible representar en forma separada los automóviles y los buses, y también asignar arcos separados a los movimientos con fase o carril exclusivo.
Adicionalmente, se debe definir las líneas de detención en cada nodo, entendiendo como línea de detención la línea en que se detiene un conjunto de movimientos vehiculares que forman una cola de propiedades homogéneas. Así, para distinguir dos líneas de detención en un acceso de una intersección se requiere que se formen dos colas diferentes, como por ejemplo, una cola para el movimiento de giro a izquierda y otra para el movimiento de frente. Cada línea de detención debe tener asociado por lo menos un arco y debe tener un flujo de saturación determinado.
D.5.5.2 Datos del semáforo. Los tiempos de semáforos actuales son necesarios para el proceso de calibración de TRANSYT-7F a la red. Después de este proceso el funcionamiento de los planes actuales puede ser simulado con objeto de evaluarlo.
Para el plan actual son necesarios los datos siguientes: duración del ciclo, desfases, secuencia de fases, duración de intervalos y duración mínima de fases.
Los datos de planes existentes pueden adquirirse en las oficinas de ingeniería de tránsito o mantenimiento. Si no se consigue el plan de un semáforo de tiempo fijo, o si el semáforo es accionado se impone la toma de datos de campo.
D.5.5.3 Datos de flujos de saturación, tiempo perdido en el arranque y prolongación del tiempo de verde efectivo. Estos datos se consideran conjuntamente por estar interrelacionados.
El flujo de saturación es la base de la capacidad que tiene una intersección semaforizada para un movimiento, entendiendo como capacidad el máximo
ANEXO D. PROGRAMA TRANSYT-7F
D-40
número de vehículos que tienen posibilidad razonable de pasar por un punto o tramo uniforme de una vía en tiempo determinado bajo las condiciones prevalecientes. El flujo de saturación se estima suponiendo que el movimiento tiene verde durante una hora completa, y se expresa en vehículos por hora de verde (veh/hv).
El intervalo entre vehículos, en segundos, que corresponde al flujo de saturación se llama intervalo de saturación.
TRANSYT-7F requiere el flujo de saturación como una entrada. Varios estudios han sugerido flujos promedios de 1500 a 1700 veh/hv/ca (vehículos por hora de verde por carril). Cuando el tránsito avanza en pelotones densos un flujo de 1800 veh/hv/ca puede ser posible. Los flujos de saturación para movimientos de giro son normalmente más pequeños que éstos.
El tiempo perdido en el arranque se expresa en segundos y representa el tiempo adicional al intervalo de saturación que consumen los primeros vehículos de una cola que se pone en marcha en una intersección semaforizada, debido a la demora en responder a la indicación verde y en acelerar para alcanzar la velocidad en marcha normal. Generalmente este valor oscila entre 2 y 4 segundos.
Por su parte, la prolongación del tiempo de verde efectivo también se expresa en segundos y se define como la porción del intervalo amarillo durante el cual los vehículos siguen cruzando la línea de detención. Este tiempo es generalmente un poco menor que la duración del intervalo de despeje amarillo.
Es importante enfatizar que lo ideal es obtener estos datos a través de investigaciones de campo, por que ellas reflejan las características propias de la ciudad en estudio, en lo referente a tipos de vehículos, comportamiento de conductores y peatones. Existen varios métodos para hacer los estudios de campo.
D.5.5.4 Datos de velocidad y tiempo de recorrido. Una de las variables que controla el algoritmo de dispersión de pelotón en TRANSYT-7F es el tiempo de recorrido de los vehículos en los arcos. El tiempo de recorrido en un arco es el tiempo que emplea un vehículo en trasladarse desde la línea de detención del nodo anterior hasta la línea de detención del arco estudiado en el nodo siguiente. Este tiempo corresponde a una velocidad de crucero (lo que significa que el vehículo tiene una velocidad promedio sostenida bajo las condiciones prevalecientes del tránsito), considerando que los semáforos están en verde y no existen colas, es decir, que no afectan al vehículo.
ANEXO D. PROGRAMA TRANSYT-7F
D-41
La información de velocidad que necesita TRANSYT-7F es la velocidad promedio de crucero en el arco de las corrientes vehiculares que circulan por este; la cual es la velocidad promedio sostenida a lo largo del arco bajo las condiciones prevalecientes de tránsito. También puede usarse el tiempo de recorrido según el tipo de datos tomados.
Probablemente el método más sencillo para tomar datos de velocidad sea mediante observaciones desde un vehículo flotante. En arcos donde las velocidades son variables, esta técnica da una buena aproximación de la velocidad promedio en el arco. En un arco donde la velocidad es relativamente constante, es aceptable una muestra de velocidad a media cuadra con un estudio de velocidad de punto.
Los tiempos habituales de parada de los buses pueden tomarse de estadísticas de las empresas de buses, pero si no existen se pueden obtener fácilmente de medidas de campo.
D.5.5.5 Datos de volumen de tránsito. Los datos de entrada de volumen requeridos para cada arco incluyen el flujo total promedio que llega al nodo delantero, los flujos promedios que contribuyen al arco, provenientes del nodo de atrás y el flujo promedio uniforme de estacionamiento a media cuadra o de otra fuente no controlada. Los flujos totales en un arco se determinan mediante aforos de movimientos de giro en el nodo delantero, mientras que los volúmenes de entrada se determinan a partir de los aforos de giros en el nodo de atrás.
Los volúmenes de tránsito requeridos son aforos de volúmenes totales, flujo total por arco y por movimiento, flujos originados a media cuadra (p.e. estacionamientos), flujos que entran desde los arcos de atrás y clasificación del tránsito. Obsérvese que no se requiere aforos peatonales, pero se deben especificar tiempos mínimos en las fases para que los peatones puedan cruzar las calles en forma segura.
Los aforos de volúmenes totales se registran a lo largo de todo el día y permiten definir los distintos periodos representativos que ocurren durante el día (períodos pico de entrada, períodos pico de salida, períodos no pico, etc.)
Los datos de volúmenes de tránsito deben tomarse en el campo a menos que existan datos recientes al nivel de detalle exigido. Aforos de tránsito existentes no se deben usar si tienen más de seis meses de tomados, a menos que sean cuidadosamente corregidos mediante factores que representen las condiciones del momento del estudio.

ANEXO D. PROGRAMA TRANSYT-7F
D-42
D.5.6 Estructura del archivo de datos del TRANSYT-7F. En la Tabla D.3 se hace un resumen de los registros que considera el archivo de datos para ejecutar el TRANSYT-7F en términos de tarjetas.
TABLA D.3. Estructura del archivo de datos del TRANSYT-7F
Sección y tipo de tarjeta
Nombre de la tarjeta Comentario
CONTROLES DE LA RED Deben ir primero y en orden numérico ascendente
Título de ejecución
Tarjeta del título de la ejecución.
Debe ser la primer tarjeta
0 Opciones especiales Opcional 1 Tarjeta de control Se necesita solo una 21 Lista de nodos Se necesita para la
optimización 3 Tarjeta de numeración de
movimientos Opcional
4 Tamaños de paso de optimización
Opcional
5 No se utiliza Reservada para uso futuro 6 Parámetros de
sensibilidad Opcional
71 Línea de detención compartida
Opcional.
81 Parámetros del modelo Opcional 9 No se utiliza Reservada para uso futuro 10 Parámetros de operación Opcional DATOS ESPECIFICOS DE NODOS
Deben seguir a los Controles de la Red y conformar paquetes por intersección. Ordenadas ascendentemente excepto la tarjeta 29 que debe seguir a la 28.
1X Períodos del semáforo Se necesita uno por nodo 18 Períodos del semáforo
(Continuación) Opcional
2Y Programación de fases Se necesita una por fase 2Z1 Programación de fases
(Continuación) Opcional
28 Datos para el arco Se necesita una por arco 29 Datos para el arco Opcional

ANEXO D. PROGRAMA TRANSYT-7F
D-43
(Continuación) DATOS ESPECIFICOS DE NODOS
Se repiten las tarjetas 1X hasta la 28/29 para todos los nodos siguientes.
1X-28/29 Datos del nodo Se necesita un paquete por nodo, no se requiere un orden entre paquetes
EMBOTELLAMIENTOS
Debe seguir a todos los datos normales de nodo
-28 Datos del arco con embotellamiento
Se necesita una por arco
-29 Datos del arco con embotellamiento (Continuación)
Opcional
TARJETAS DE MODIFICACIÓN Y DE PESOS Deben estar en orden ascendente
311 Pesos del flujo de arco a arco
Opcional
341 Parámetros de penalización por extensión de cola
Opcional
351 Multiplicador de velocidad Opcional 361 Multiplicador de volumen Opcional 371 Modificador de pesos para
demoras Opcional
381 Modificadores por perjuicio de parada
Opcional
391 Modificación de dispersión de pelotón
Opcional
TARJETAS DE DIAGRAMAS Y ARTERIAS Deben estar en orden ascendente
401 Diagrama de perfil de flujo Opcional 411 Coordinación de ancho de
banda Opcional
421 Definición de arteria Opcional 431 Multiplicadores de pesos
en arterias Opcional
ESPECIFICACIONES DE RUTA Y EJECUCIÓN Deben estar en orden ascendente
5X Parámetros de ejecución Se necesita 60 Parámetros tiempo-
espacio Opcional, pero si se incluye, estas tres tarjetas
ANEXO D. PROGRAMA TRANSYT-7F
D-44
deben estar en orden Título tiempo-espacio
Tarjeta de título tiempo-espacio
611 Lista de arcos para tiempo-espacio
9X Terminación Se necesita una por ejecución
COMENTARIOS Opcional Comentario1 Tarjetas de comentario Puede aparecer en
cualquier parte excepto antes de la tarjeta 0 o 1.
Blanco1 Tarjetas en blanco Delinean archivo de datos 1 Se admiten múltiples tarjetas de este tipo (o de continuación) en esta localización.
D.6 INTERPRETACION DE RESULTADOS
D.6.1 Salidas del programa. TRANSYT-7F proporciona seis tipos de salidas: informe de datos de entrada, tabla de parámetros del tránsito, programación de los controladores, diagramas de perfil de flujo en líneas de detención, diagramas espacio-tiempo y resumen de evaluación de duración de ciclo.
D.6.1.1 Informe de datos de entrada. Este informe imprime los datos de entrada tal como fueron entrados, pero con títulos apropiados para identificarlos. Además, señala los errores detectados.
D.6.1.2 Tabla de parámetros del tránsito. Se imprime una tabla con todos los Indices de Efectividad (IE) para cada arco, subtotalizados por intersección e integrados para toda la red.
D.6.1.3 Programación de los controladores. Una tabla de programación de los controladores se da para cada controlador. El formato de la tabla permite su implantación directa en el campo.
D.6.1.4 Diagramas de perfil de flujo en líneas de detención. Para los arcos que se indiquen, se imprimen los perfiles de flujo de descarga y de llegada (histogramas). Estos diagramas son útiles para evaluar la efectividad de la coordinación de semáforos programada.
D.6.1.5 Diagramas espacio-tiempo. Se imprimen los diagramas espacio-tiempo para cualquier número de rutas que se desee en la red. Con estos diagramas se puede evaluar la efectividad de la coordinación de semáforos para el avance del tránsito en las rutas señaladas.
ANEXO D. PROGRAMA TRANSYT-7F
D-45
D.6.1.6 Resumen de evaluación de duración de ciclo. Si se especifica más de una duración de ciclo, se imprime una tabla resumen con el Índice de Servicio (IS) para cada duración de ciclo evaluada.
D.6.2 Interpretación de los índices de efectividad. TRANSYT-7F produce un conjunto de Indices de Efectividad (IE) que el ingeniero puede usar para evaluar los planes de programación de los semáforos. Los IE más importantes son impresos en la tabla de parámetros del tránsito de los arcos. Estos son: grado de saturación, viajes totales, tiempo de viajes totales, demoras, paradas uniformes, máxima longitud de cola y capacidad de cola, consumo de combustible e Índice de Servicio (IS).
Los valores IE producidos por el programa reflejan el plan de programación de los semáforos elaborado para los datos de entrada. Los valores IE están relacionados con los efectos del plan de semáforos sobre el funcionamiento del tránsito en cada arco de la red.
D.6.3 Interpretación de la programación de los controladores. Las programaciones que entrega TRANSYT-7F han sido diseñadas en principio para controladores de semáforos de tiempo fijo. La duración de intervalos fijos (o sea intervalos de despeje) es idéntica a los valores de entrada para dichos intervalos. La duración de los intervalos designados como variables y los desfases son encontrados por el programa mediante el proceso de optimización. Las unidades usadas son segundos y porcentaje de ciclo; por lo tanto, esta Tabla puede ser usada directamente para la instalación de campo.
D.6.4 Interpretación de gráficos. TRANSYT-7F produce dos tipos de gráficos: el del perfil de flujo en las líneas de detención (histograma de flujo) y el diagrama espacio-tiempo.
D.6.4.1 Gráfico de perfil de flujo en la línea de detención. En estos gráficos, la escala horizontal representa la duración de ciclo; cada carácter de esta escala equivale a una determinada cantidad de tiempo. La escala vertical representa el flujo en el arco. El máximo valor generalmente representa el flujo de saturación.
D.6.4.2 Diagramas espacio-tiempo. TRANSYT-7F también produce el tradicional diagrama espacio-tiempo para cualquier conjunto de arcos contiguos. Los desfases mostrados en el diagrama son con respecto al controlador maestro, si este fue indicado en la tarjeta tipo 10. Los diagramas espacio-tiempo de una optimización de TRANSYT-7F pueden no tener bandas de progresión completas que sean tan anchas como aquellas producidas manualmente o con un modelo de optimización de máximo ancho de banda. Esto se debe a que TRANSYT-7F considera

ANEXO D. PROGRAMA TRANSYT-7F
D-46
demoras y detenciones de todo el tránsito en toda la red, incluyendo calles que cruzan arterias. Las arterias reciben atenciones proporcionales a sus volúmenes de tránsito.
D.7 EJEMPLO
Con el propósito de ilustrar la aplicación del programa TRANSYT-7F se presenta a continuación un ejemplo en el cual se destacan las funciones fundamentales del programa.
Se ha aplicado TRANSYT-7F en un corredor constituido por una vía urbana de dos carriles, uno por sentido, y el cruce con 7 calles. De las siete intersecciones dos se han modelado como controladas con señal de PARE, las demás son controladas con semáforos prefijados o de tiempo fijo, es decir, no accionados por el tránsito aunque esta condición es posible de ser simulada por el programa.
En la Figura D.16 se muestra a escala la configuración de la vía en cuestión y las que son adyacentes y en la Figura D.17 se indica esquemáticamente el tramo de vía y su intersección con las calles 10, 7, 1 Sur, 5 Sur, 9 Sur y 16A Sur. La Transversal Inferior tiene pendientes suaves mientras que las calles son escarpadas. Los cruces con la calle 7 se han considerado controladas con señales de PARE o CEDA EL PASO ya que se trata de una intersección a desnivel y la entrada y salida de ella se comportan así. El tránsito esta compuesto mayoritariamente por automóviles y hay algunas rutas de buses con paradas cortas.
En la Figura D.18 se muestra el modelo de las intersecciones de la Transversal Inferior con todas las calles según la relación de La Tabla D.4.
TABLA D.4. Relación de nodos modelados en la Transversal Inferior
Nodo Intersección Tipo de control del tránsito 1 Calle 10 Semaforizada 2 Calle 7. Loma del Tesoro. CEDA EL PASO 3 Calle 7. Loma del Tesoro. CEDA EL PASO 4 Calle 1Sur Semaforizada 5 Calle 5Sur. Loma de Los González. Semaforizada 6 Calle 9Sur. Loma de Los Balsos. Semaforizada 7 Calle 16Asur. Loma del Campestre. Semaforizada
Elaboración propia.
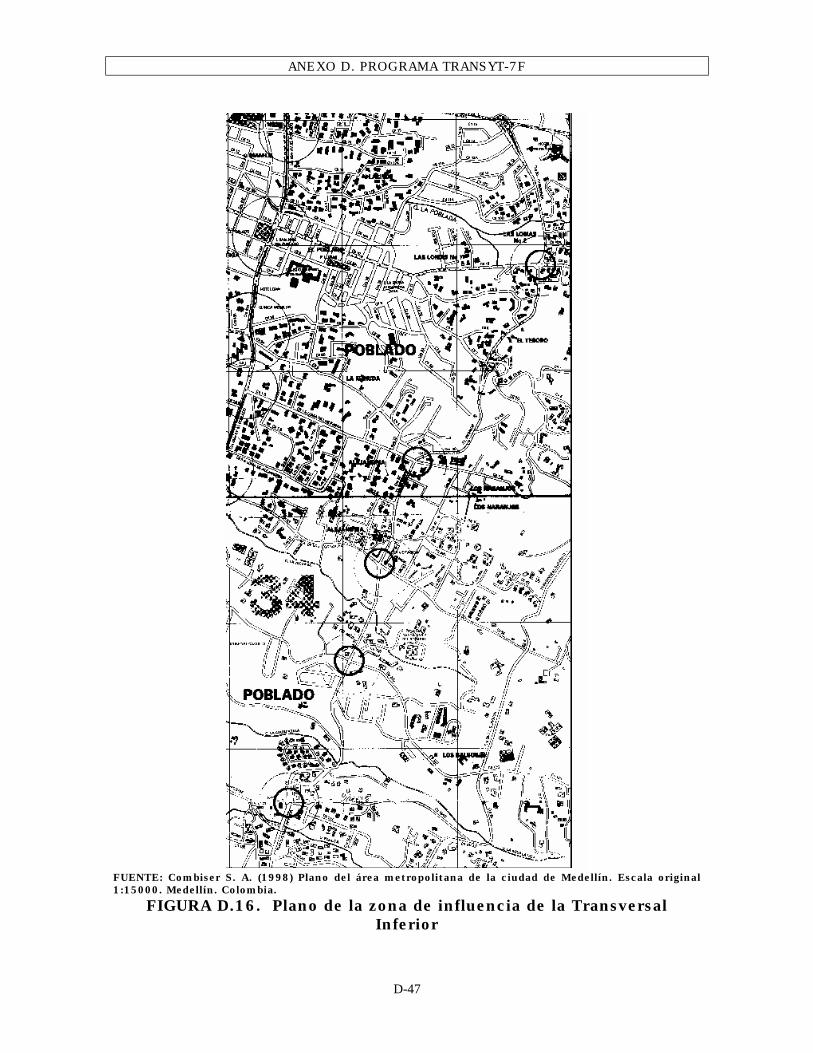
ANEXO D. PROGRAMA TRANSYT-7F
D-47
FUENTE: Combiser S. A. (1998) Plano del área metropolitana de la ciudad de Medellín. Escala original 1:15000. Medellín. Colombia.
FIGURA D.16. Plano de la zona de influencia de la Transversal Inferior

ANEXO D. PROGRAMA TRANSYT-7F
D-48
FUENTE: Elaboración propia.
FIGURA D.17. Esquema vial de la Transversal Inferior

ANEXO D. PROGRAMA TRANSYT-7F
D-49
FUENTE: Elaboración propia. FIGURA D.18. Modelación de la Transversal Inferior para TRANSYT-7F

ANEXO D. PROGRAMA TRANSYT-7F
D-50
El modelo de la vía completa consta de 7 nodos y 83 arcos. Los arcos de línea continua son de automóviles y las demás son de buses. El número encerrado en un rectángulo es el número del arco, a su lado aparece el volumen horario que conduce dicho arco por hora y el flujo de saturación se indica para cada línea de detención en vehículos por hora de verde (vphv). Lo anterior puede apreciarse en la Figura D.19.
FUENTE: Elaboración propia.
FIGURA D.19. Convenciones para modelar la red
La información que requiere TRANSYT-7F para ser ejecutado se introdujo utilizando el editor T7FDIM siguiendo las indicaciones del manual de operación y que se ha resumido en el capítulo correspondiente de este documento. En la Tabla D.5 se muestra parcialmente los datos de entrada entregados, cada línea representa una tarjeta o registro del archivo de entrada. Los primeros renglones corresponden a datos de entrada generales de toda la red, posteriormente se presentan los datos para los nodos 1 (A partir del valor 13 de la columna 1) y 2 (A partir del valor 11 de la columna 1) y los arcos asociados a ellos.
La ejecución realizada corresponde a una evaluación de duración de ciclo entre 80 y 120 segundos cuyo resultado indica que el correspondiente a 95 segundos es el mejor de todos, basándose en la optimización de la función objetivo (PERFORMANCE INDEX) que se expresa en términos de demoras y detenciones. Los resultados de la ejecución se muestran en el informe de salida que se presenta parcialmente conservando el formato original y que se compone de las siguientes partes:
• Presentación del programa TRANSYT-7F
• Informe de los datos de entrada

ANEXO D. PROGRAMA TRANSYT-7F
D-51
• Tabla resumen de indicadores por ciclo
• Tabla de indicadores de desempeño para el mejor ciclo
• Tabla de los indicadores de operación de tránsito considerando el conjunto de nodos
• Histogramas de flujo
TABLA D.5. Datos de entrada al TRANSYT-7F *EVALUACION DE DURACION DE CICLO DE LA TRANSVERSAL INFERIOR ENTRE CALLES 10 Y *6A SUR. 0 1 0 0 4 7 8 0 50 0 0 30 -1 80 120 5 1 1 2 2 -1 0 2 60 0 0 1 1 2 1 2 3 4 5 6 7 0 0 0 0 0 0 0 0 7 101 102 109 114 0 103 104 110 0 0 105 111 123 0 0 7 107 112 119 0 0 401 402 413 0 0 0 0 0 0 0 7 403 404 410 415 416 406 411 0 0 0 407 412 420 424 0 7 501 502 509 513 0 503 504 510 515 522 505 506 511 0 0 7 507 508 512 0 0 601 602 609 0 0 603 604 610 615 0 7 605 606 611 0 0 607 608 612 624 0 701 702 709 714 0 7 703 710 715 0 0 705 706 711 723 0 707 708 0 0 0 10 1 3 1 1600 30 50 100 60 0 85 50 40 130 2 120 13 1 0 0 22 3 1 22 3 1 24 3 1 0 0 0 21 1 1 1 2 3 12 103 104 110 0 0 0 0 0 22 1 4 4 5 6 12 105 111 123 107 112 119 0 0 0 23 1 7 7 8 9 12 101 102 109 114 0 0 0 0 0 28 101 180 1700 388 0 201 554 32 206 13 25 0 0 0 30 28 102 180 0 18 0 201 25 32 206 10 25 0 0 0 30 28 109 180 0 41 0 201 59 32 206 10 25 0 0 0 30 28 114 180 0 18 0 213 29 2630 0 0 0 0 0 0 15 28 103 400 1720 355 0 0 0 40 0 0 0 0 0 0 67 28 104 400 0 30 0 0 0 40 0 0 0 0 0 0 67 28 110 400 0 21 0 0 0 40 0 0 0 0 0 0 67 28 105 400 1500 122 0 0 0 25 0 0 0 0 0 0 67 28 111 400 0 49 0 0 0 25 0 0 0 0 0 0 67 28 123 400 0 28 0 0 0 2030 0 0 0 0 0 0 33 28 107 200 1520 218 0 0 0 25 0 0 0 0 0 0 33 28 112 200 0 68 0 0 0 25 0 0 0 0 0 0 33 28 119 200 0 10 0 0 0 2030 0 0 0 0 0 0 17 11 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 21 2 0 0 0 0 0 201 213 203 210 215 -206 -211 0 0 28 201 50 1700 638 0 312 10 25 301 638 35 0 0 0 8 28 213 50 1700 29 0 313 29 2830 0 0 0 0 0 0 4 28 203 180 1720 343 0 103 253 40 0 0 0 0 0 0 30 28 210 180 1720 48 0 103 102 40 111 14 25 0 0 0 30 28 215 180 1720 33 0 123 28 2030 0 0 0 0 0 0 15 28 206 80 0 15 0 0 0 25 0 0 0 0 0 0 13 29 206 0 0 0 0 0 0 0 201 0 213 0 203 0 0 28 211 80 0 10 0 0 0 25 0 0 0 0 0 0 13 29 211 0 0 0 0 0 0 0 203 0 215 0 0 0
D.7.1 Presentación del programa TRANSYT-7F. En la Tabla D.6 se muestra el encabezamiento del informe y se hace la presentación del programa, versión, entidad patrocinadora, que lo desarrolló y la de servicios de mantenimiento. Además, la fecha y hora de ejecución de la corrida y el nombre del archivo de entrada.

ANEXO D. PROGRAMA TRANSYT-7F
D-52
TABLA D.6. Presentación del programa TRANSYT-7F ****************************************************************************** * * * Release 7.2 (TRANSYT-7F) February 1994 * * * * TRAFFIC SIGNAL SYSTEM OPTIMIZATION * * * * PROGRAM * * * * Sponsored by: Developed by: * * * * U.S. Department of Transportation University of Florida * * Federal Highway Administration Transportation Research Center * * * * Software Maintenance and User Support Furnished by: * * Center for Microcomputers in Transportation (McTrans) * * Transportation Research Center, University of Florida * * 512 Weil Hall, Gainesville, FL 32611-6585 USA * * (904) 392-0378 * * * * TRANSYT/7 (C) British Crown Copyright. * * TRANSYT-7F Copyright 1980-1994, University of Florida. * * All Rights Reserved. * * * ****************************************************************************** Date of Run: 6/24/98 Start Time of Run: 17:41:53 Data File: trvinf1.TIN
D.7.2 Informe de datos de entrada. La Tabla D.7 se presentan los datos de entrada organizados en los 16 campos y adicionándoles notas y advertencias. En principio se muestran los datos de control general y luego los datos de entrada correspondiente a cada una de las intersecciones indicados con un encabezamiento. En este caso solo aparecen los correspondientes a las intersecciones 1 y 2.
TABLA D.7. Informe de los datos de entrada ------------------------------------------------------ I N P U T D A T A R E P O R T F O R R U N 1 ------------------------------------------------------ FIELDS: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 --- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- *EVALUACION DE DURACION DE CICLO DE LA TRANSVERSAL INFERIOR ENTRE CALLES 10 Y 16A SUR 0 1 0 0 4 7 8 0 50 0 0 30 0 0 0 0 --- 1 --- NOTE - + THE NARROW (SCREEN) FORMAT HAS BEEN REQUESTED. THE INPUT DATA REPORT AND PERFORMANCE TABLES, WILL BE PRINTED IN 80 COLUMNS FORMAT. 1 80 120 5 1 1 2 2 -1 0 2 60 0 0 1 1 >>> 106 +++ WARNING + + THE SEC/STEPS FACTOR IN FIELD 5 IS TOO SMALL FOR CYCLE LENGTHS ABOVE 60 SECONDS. IT WILL BE INCREASED TO ALLOW A MAXIMUM OF 60 STEPS/CYCLE. 1TRANSYT-7F: PAGE 2 *EVALUACION DE DURACION DE CICLO DE LA TRANSVERSAL INFERIOR ENTRE CALLES 10 Y 16A SUR FIELDS: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 --- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- >>> 106 +++ WARNING +

ANEXO D. PROGRAMA TRANSYT-7F
D-53
+ THE SEC/STEPS FACTOR IN FIELD 6 IS TOO SMALL FOR CYCLE LENGTHS ABOVE 60 SECONDS. IT WILL BE INCREASED TO ALLOW A MAXIMUM OF 60 STEPS/CYCLE. --- 7 --- NOTE - + A STOP PENALTY OF '-1' WILL RESULT IN AUTOMATIC CALCULATION OF THE PI TO MINIMIZE FUEL CONSUMPTION. LINK SPECIFIC DELAY OR STOP WEIGHTS ON CARD TYPE 37 & 38 WILL STILL BE APPLIED, HOWEVER. --- 12 --- NOTE - + A VALUE OF '1' IN FIELD 16 CAUSES A DATA FILE WITH THE OPTIMIZED TIMING PLAN TO BE WRITTEN. 2 1 2 3 4 5 6 7 0 0 0 0 0 0 0 0 7 101 102 109 114 0 103 104 110 0 0 105 111 123 0 0 7 107 112 119 0 0 401 402 413 0 0 0 0 0 0 0 7 403 404 410 415 416 406 411 0 0 0 407 412 420 424 0 7 501 502 509 513 0 503 504 510 515 522 505 506 511 0 0 7 507 508 512 0 0 601 602 609 0 0 603 604 610 615 0 7 605 606 611 0 0 607 608 612 624 0 701 702 709 714 0 7 703 710 715 0 0 705 706 711 723 0 707 708 0 0 0 10 1 3 1 1600 30 50 100 60 0 85 50 40 130 2 120 1TRANSYT-7F: PAGE 3 *EVALUACION DE DURACION DE CICLO DE LA TRANSVERSAL INFERIOR ENTRE CALLES 10 Y 16A SUR FIELDS: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 --- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- --- 15 --- NOTE - + INPUT UNITS WERE SPECIFIED AS FOLLOWS: * ENGLISH/METRIC UNITS IN METRIC ------------------ INTERSECTION 1 ------------------ 13 1 0 0 22 3 1 22 3 1 24 3 1 0 0 0 21 1 1 1 2 3 12 103 104 110 0 0 0 0 0 0 22 1 4 4 5 6 12 105 111 123 107 112 119 0 0 0 23 1 7 7 8 9 12 101 102 109 114 0 0 0 0 0 28 101 180 1700 388 0 201 554 32 206 13 25 0 0 0 30 28 102 180 0 18 0 201 25 32 206 10 25 0 0 0 30 28 109 180 0 41 0 201 59 32 206 10 25 0 0 0 30 28 114 180 0 18 0 213 29 2630 0 0 0 0 0 0 15 28 103 400 1720 355 0 0 0 40 0 0 0 0 0 0 67 28 104 400 0 30 0 0 0 40 0 0 0 0 0 0 67 28 110 400 0 21 0 0 0 40 0 0 0 0 0 0 67 28 105 400 1500 122 0 0 0 25 0 0 0 0 0 0 67 28 111 400 0 49 0 0 0 25 0 0 0 0 0 0 67 28 123 400 0 28 0 0 0 2030 0 0 0 0 0 0 33 28 107 200 1520 218 0 0 0 25 0 0 0 0 0 0 33 28 112 200 0 68 0 0 0 25 0 0 0 0 0 0 33 28 119 200 0 10 0 0 0 2030 0 0 0 0 0 0 17 ------------------ INTERSECTION 2 ------------------ 11 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 --- 31 --- NOTE - + NODE NO. 2 HAS ONE PHASE SPECIFIED (I.E., NO SIGNAL, CONTROL). ALL LINKS MUST BE LISTED ON CARD TYPE 21. 21 2 0 0 0 0 0 201 213 203 210 215 -206 -211 0 0 28 201 50 1700 638 0 312 10 25 301 638 35 0 0 0 8 28 213 50 1700 29 0 313 29 2830 0 0 0 0 0 0 4 28 203 180 1720 343 0 103 253 40 0 0 0 0 0 0 30 28 210 180 1720 48 0 103 102 40 111 14 25 0 0 0 30 28 215 180 1720 33 0 123 28 2030 0 0 0 0 0 0 15 28 206 80 0 15 0 0 0 25 0 0 0 0 0 0 13 29 206 0 0 0 0 0 0 0 201 0 213 0 203 0 0 28 211 80 0 10 0 0 0 25 0 0 0 0 0 0 13 29 211 0 0 0 0 0 0 0 203 0 215 0 0 0 0 1TRANSYT-7F: PAGE 4
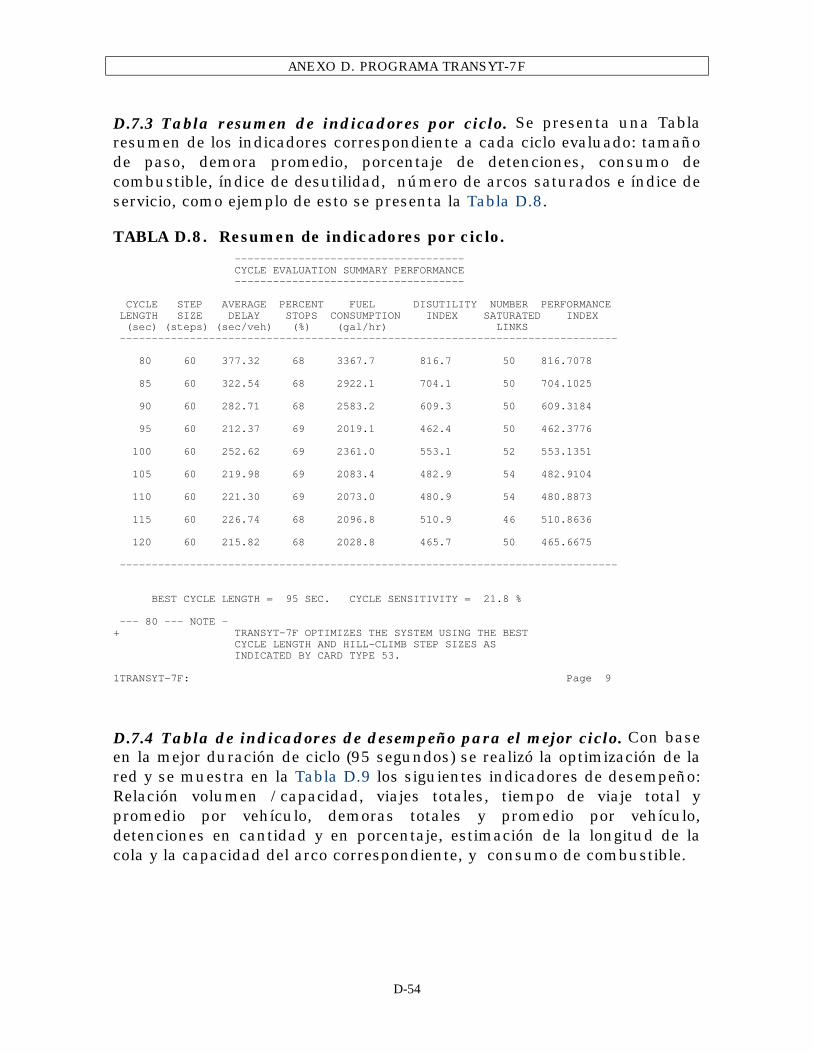
ANEXO D. PROGRAMA TRANSYT-7F
D-54
D.7.3 Tabla resumen de indicadores por ciclo. Se presenta una Tabla resumen de los indicadores correspondiente a cada ciclo evaluado: tamaño de paso, demora promedio, porcentaje de detenciones, consumo de combustible, índice de desutilidad, número de arcos saturados e índice de servicio, como ejemplo de esto se presenta la Tabla D.8.
TABLA D.8. Resumen de indicadores por ciclo. ------------------------------------ CYCLE EVALUATION SUMMARY PERFORMANCE ------------------------------------ CYCLE STEP AVERAGE PERCENT FUEL DISUTILITY NUMBER PERFORMANCE LENGTH SIZE DELAY STOPS CONSUMPTION INDEX SATURATED INDEX (sec) (steps) (sec/veh) (%) (gal/hr) LINKS ------------------------------------------------------------------------------ 80 60 377.32 68 3367.7 816.7 50 816.7078 85 60 322.54 68 2922.1 704.1 50 704.1025 90 60 282.71 68 2583.2 609.3 50 609.3184 95 60 212.37 69 2019.1 462.4 50 462.3776 100 60 252.62 69 2361.0 553.1 52 553.1351 105 60 219.98 69 2083.4 482.9 54 482.9104 110 60 221.30 69 2073.0 480.9 54 480.8873 115 60 226.74 68 2096.8 510.9 46 510.8636 120 60 215.82 68 2028.8 465.7 50 465.6675 ------------------------------------------------------------------------------ BEST CYCLE LENGTH = 95 SEC. CYCLE SENSITIVITY = 21.8 % --- 80 --- NOTE - + TRANSYT-7F OPTIMIZES THE SYSTEM USING THE BEST CYCLE LENGTH AND HILL-CLIMB STEP SIZES AS INDICATED BY CARD TYPE 53. 1TRANSYT-7F: Page 9
D.7.4 Tabla de indicadores de desempeño para el mejor ciclo. Con base en la mejor duración de ciclo (95 segundos) se realizó la optimización de la red y se muestra en la Tabla D.9 los siguientes indicadores de desempeño: Relación volumen /capacidad, viajes totales, tiempo de viaje total y promedio por vehículo, demoras totales y promedio por vehículo, detenciones en cantidad y en porcentaje, estimación de la longitud de la cola y la capacidad del arco correspondiente, y consumo de combustible.

ANEXO D. PROGRAMA TRANSYT-7F
D-55
TABLA D.9. Indicadores de desempeño para el mejor ciclo *EVALUACION DE DURACION DE CICLO DE LA TRANSVERSAL INFERIOR ENTRE CALLES 10 Y 16A SUR CYCLE: 95 Seconds, 60 Steps <PERFORMANCE WITH OPTIMAL SETTINGS> MOVEMENT/ TOTAL TRAVEL TIME TOTAL AVG. UNIFORM MAX BACK FUEL NODE NOS. V/C TRAVEL TOTAL AVG. DELAY DELAY STOPS OF QUEUE CONS. (%) (v-km) (v-hr)(sec/v) (v-hr) (sec/v) NO. (%) EST.CAP. (lit) ----------------------------------------------------------------------------- 101 P: 82 69.84 4.94 45.9 2.75 25.5 215.( 55) 8 30 17.7 102 S: 82 3.24 .25 49.9 .14 28.1 11.( 61) 101 101S .9 103 P: 75 142.00 6.87 69.6 3.32 33.6 299.( 84) 9 67 28.5 104 S: 75 12.00 .58 69.6 .28 33.6 25.( 84) 103 103S 2.4 105 P: 55 48.80 3.05 90.1 1.10 32.5 101.( 83) 4 67 9.8 107 P: 80 43.60 4.50 74.2 2.75 45.4 194.( 89) 7 33 14.3 109 S: 82 7.38 .54 47.6 .30 26.5 24.( 58) 101 101S 1.9 110 S: 75 8.40 .41 69.6 .20 33.6 18.( 84) 103 103S 1.7 111 S: 55 19.60 1.23 90.1 .44 32.5 41.( 83) 105 105S 4.0 112 S: 80 13.60 1.40 74.2 .86 45.4 61.( 89) 107 107S 4.5 114 B S: 82 3.24 .42 84.5 .15 30.7 12.( 68) 101 101S 2.5 119 B S: 80 2.00 .29 106.1 .13 45.4 9.( 89) 107 107S 1.8 123 B S: 55 11.20 1.00 129.2 .25 32.5 23.( 83) 105 105S 6.4 NODE 1: 82 384.90 25.49 12.67 33.4 1032.( 76) 96.44 201 : 38 31.90 .92 5.2 .00 .0 0.( 0) 0 8 3.6 203 : 20 61.74 1.54 16.2 .00 .0 0.( 0) 0 30 6.5 206 : 4 1.20 .05 11.5 .00 .0 15.(100) 0 13 .3 210 : 3 8.64 .23 17.4 .00 .0 0.( 0) 0 30 .9 211 : 2 .80 .03 11.5 .00 .0 10.(100) 0 13 .2 213 B : 2 1.45 .36 44.6 .00 .0 0.( 0) 0 4 .7 215 B : 2 5.94 .52 57.1 .00 .0 0.( 0) 0 15 2.4 NODE 2: 38D 111.67 3.65 .00 .0 25.( 2) 14.75 ----------------------------------------------------------------------------- 1TRANSYT-7F: Page 10
C.7.5 Tabla de los indicadores de operación de tránsito considerando el conjunto de nodos. Con base en la mejor duración de ciclo (95 segundos) se realizó la optimización de la red y se muestra en la Tabla D.10 para el conjunto de nodos que la constituye los siguientes indicadores de desempeño: viajes totales, tiempo de viaje total, demoras uniforme total, demora aleatoria total, demora total, demora promedio, demora de los pasajeros, detenciones en veh/h y en porcentaje, velocidad del sistema, consumo de combustible, costo de operación e índice de servicio.
TABLA D.10. Indicadores de operación del tránsito de la red *EVALUACION DE DURACION DE CICLO DE LA TRANSVERSAL INFERIOR ENTRE CALLES 10 Y 16A SUR CYCLE: 95 Seconds, 60 Steps SYSTEM-WIDE PERFORMANCE: ALL NODES ---------------------------------- SYSTEM PERFORMANCE MEASURES UNITS BUSES OTHER TOTALS -------------------------------------------------------------- Total Travel veh-km/hr 79 2055 2133 Total Travel Time veh-hr/hr 29 728 757 Total Uniform Delay veh-hr/hr 2 66 69 Total Random Delay veh-hr/hr 20 594 614

ANEXO D. PROGRAMA TRANSYT-7F
D-56
Total Delay veh-hr/hr 22 660 682 Average Delay sec/veh 223.6 250.7 249.7 Passenger Delay pax-hr/hr 27 792 819 Stops: Total veh/hr 211 6442 6652 Percentage % 59 68 68 System Speed km/hr 2.7 2.8 2.8 Fuel Consumption lit/hr 200 2125 2325 Operating Cost $/hr 61 1588 1649 Performance Index DI 548.5 -------------------------------------------------------------- Performance Index (PI): Disutility Index (DI): Disutility Index Excess Fuel Consumption No. of Simulations = 118, Links = 4262 Elapsed Time = 117.4 sec. 1TRANSYT-7F: Page 14
D.7.6 Histogramas de flujo. Diagramas de histogramas de flujo correspondiente a la ruta de los movimientos de frente desde el nodo 1 hasta el 7. En este ejemplo sólo aparece los histogramas del arco 103 y del 203. La interpretación debe hacerse considerando las convenciones de los símbolos utilizados en la gráfica y los conceptos mencionados a lo largo de este texto. *EVALUACION DE DURACION DE CICLO DE LA TRANSVERSAL INFERIOR ENTRE CALLES 10 Y 16A SUR CYCLE: 95 Seconds, 60 Steps < T R A N S Y T - 7 F F L O W P R O F I L E D I A G R A M S > SYMBOL KEYS: Headings: Link : The link number plotted. Max Flow : Highest flow rate achieved on the link. Plt. index : Platooning index. PVG : Percentage of arrivals on effective green. Flow Profile Symbols (vertical axis is in vph): I : Arrivals which queue, normally on red on unopposed links or during periods of heavy opposing flow on opposed links during. the permitted phase(s) S : Departures from queue, normally at the saturation flow rate for "protected" links, or maximum flow rate for permitted, opposed links. O : Arrivals and departures on green, when below S's or I's, these arrivals join the back of the queue. Time Scale (horizontal axis): (BLANK) : Protected or unopposed green, yellow and all-red intervals. . : Permitted, opposed green, yellow and all-red intervals. * : Red intervals. :: : The beginning (1st) and end (2nd) of the thru band. N : The numbers across the bottom are a time scale in steps. Notes concering FPDs: 1. To convert TRANSYT-7F's timing units of "steps" to seconds, count the steps, then multiply as follows: SECONDS = STEPS * 1.58. 2. The flow profile diagram shows actual green plus yellow and all red. Offsets are adjusted to master controller if any. 3. In the 80-column output format, the "downbound" links are plotted

ANEXO D. PROGRAMA TRANSYT-7F
D-57
continuously first, then the "upbound" links are plotted continuously. 1TRANSYT-7F: Page 15 *EVALUACION DE DURACION DE CICLO DE LA TRANSVERSAL INFERIOR ENTRE CALLES 10 Y 16A SUR CYCLE: 95 Seconds, 60 Steps LINK 103 MAX FLOW 1504 VPH PLT. INDEX .00 PVG 31% 2000+ : : : : : 1500+SSSSSSSSSSSS :SSSSSSSSSSSS :SSSSSSSSSSSS :SSSSSSSSSSSS :SSSSSSSSSSSS :SSSSSSSSSSSS 1000+SSSSSSSSSSSS :SSSSSSSSSSSS :SSSSSSSSSSSS S :SSSSSSSSSSSS S :SSSSSSSSSSSS S :SSSSSSSSSSSS S 500+SSSSSSSSSSSS S :SSSSSSSSSSSS S :OOOOOOOOOOOOOOOOOOOIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIO :OOOOOOOOOOOOOOOOOOOIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIO :OOOOOOOOOOOOOOOOOOOIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIO :OOOOOOOOOOOOOOOOOOOIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIO *************************************** 123456789012345678901234567890123456789012345678901234567890 LINK 203 MAX FLOW 1357 VPH PLT. INDEX 1.14 PVG100% 2000+ : : : : : 1500+ : : OOO : OOOOO : OOOOOOO : OOOOOOOO 1000+ OOOOOOOOOO : OOOOOOOOOOO : OOOOOOOOOOOO : OOOOOOOOOOOOOO : OOOOOOOOOOOOOOO : OOOOOOOOOOOOOOOOOO 500+ OOOOOOOOOOOOOOOOOO : OOOOOOOOOOOOOOOOOOOO : OOOOOOOOOOOOOOOOOOOOO : OOOOOOOOOOOOOOOOOOOOOOO : OOOOOOOOOOOOOOOOOOOOOOOOOO : OOOOOOOOOOOOOOOOOOOOOOOOOOOOOOO 123456789012345678901234567890123456789012345678901234567890 1TRANSYT-7F: Page 16
Aunque la interpretación de los indicadores no se puede hacer de manera directa pues no son los que intuitivamente se acostumbra a usar sino deben analizarse según la definición considerada por TRANSYT pero si se analizan superficialmente los resultados puede concluirse que el esquema de operación modelado no arroja buenos resultados pues dichos indicadores como son las velocidades, detenciones y demoras promedio por

ANEXO D. PROGRAMA TRANSYT-7F
D-58
vehículo resultan de baja calidad, por lo tanto, el ingeniero planificador o diseñador debe simular nuevas alternativas en las que se equilibre la oferta de capacidad en la red vial y la demanda de tránsito existente, por ejemplo, aumentando capacidad en las intersecciones o vías, o disminuyendo los volúmenes de tránsito con diferentes opciones como la desviación del mismo por rutas alternas, promoviendo el uso del transporte público, nuevos esquemas de fases en las intersecciones semaforizadas o la filosofía del tránsito moderado (Traffic calming) o llamado también la movilidad sostenible.
D.8 OTRAS VERSIONES DE TRANSYT
El Laboratorio de Investigaciones en Transporte de Inglaterra (Transportation Research Laboratory) ha desarrollado el TRANSYT y ha incorporado revisiones que se materializan en nuevas versiones del programa. Una de ellas es el TRANSYT/10 del cual se mencionan algunas características. Ampliación de esta información puede consultarse en la página web http://www.trl.co.uk.
El TRANSYT/10 es la más reciente versión del programa de Coordinación de Semáforos del reconocido mundialmente TRL. Es un programa de computador “off-line” (DOS) para la determinación y estudio óptimo de semáforos de tiempo fijo coordinados, de sus programaciones de tiempo y en cualquier red de calles para la cual se conoce los flujos de tránsito promedio. Otras particularidades son:
• El modelo de tránsito de la red vial calcula el Índice de Servicio en términos monetarios. Una de sus rutinas de optimización busca la programación de tiempos de los semáforos que minimiza el Índice de Servicio, sujeto a una duración de verde mínima o a otras restricciones.
• El modelo también suministra la posibilidad de control por prioridad de paso, incluyendo la modelación del tránsito de giro a derecha con oposición (sistema de circulación inglés por la izquierda) en intersecciones semaforizadas.
• El programa también puede utilizarse para producir programaciones de tiempos de los semáforos que dan prioridad de paso a los buses o vehículos de emergencia, sin la necesidad de detectar individualmente vehículos especiales dentro de la corriente de tránsito mezclada.
• Pueden modelarse glorietas semaforizadas y su demora minimizada mediante el cálculo de programaciones de tiempos que reducen la obstrucción de otros vehículos por atrás manteniendo la circulación con flujo continuo.

ANEXO D. PROGRAMA TRANSYT-7F
D-59
• El TRANSYT/10 incluye una nueva función que permite la modelación precisa de accesos en forma de campana. Esto es particularmente importante en la modelación de accesos a glorietas semaforizadas donde el ensanchamiento de la entrada es común.
• Esta basado en el sistema DOS, requiere un mínimo de aproximadamente 510 kbytes disponibles de RAM, se dispone de versiones para ejecuciones con archivos muy grandes que necesitan un ambiente DPMI.

BIBLIOGRAFÍA
BIBLIOGRAFÍA
1. AKCELIK, Rhami. Traffic signals – Capacity and timming analysis. Victoria, Australia, Australian Road Reserach Board. Research Report, ARR 123, 1981, 109 páginas, 60 figuras y 25 tablas.
2. ALCALDÍA MAYOR DE SANTAFÉ DE BOGOTÁ, D. C. SECRETARÍA DE TRANSPORTE Y TRÁNSITO DE SANTAFÉ DE BOGOTÁ, D. C. THE WORLD BANK Y CAL Y MAYOR Y ASOCIADOS, S. C. Manual de planeación y diseño para la administración del tránsito y transporte en Santafé de Bogotá. Cal Y Mayor y Asociados, S. C. Santafé de Bogotá, D. C. 6 tomos. Ilustrados. 1998.
3. BRANSTON David M. y VAN ZUYLEN, Henk J. “The estimation of saturation flow efective green time and passenger car equivalents at traffic signals by multiple linear regression”. Transportation Research Vol 12 pp. 47-53. Pergamon Press. 1978.
4. CAÑAS Z., Oscar E. Y CARMONA A., Julián E. Factores de equivalencia vehicular. Trabajo Dirigido de Grado para optar el título de ingeniero civil. Universidad Nacional de Colombia – Sede Medellín. 1993.
5. CORRÊA DA ROCHA, Luiz Paulo y ALVES BORGES, Comba Maria. COPPE - Universidade Federal do Rio de Janeiro. “Efeitos do posicionamiento dos semáforos no tráfego”. Memorias del IV Congreso Panamericano de Ingeniería de Tránsito y Transporte, Mayaguéz, Puerto Rico, Jul., 1988.
6. DEPARTAMENTO DEL DISTRITO FEDERAL. COORDINACIÓN GENERAL DE TRANSPORTE Manual de Dispositivos para el Control del Tránsito en Zonas Urbanas y Suburbanas. Volumen I. Il, Primera Edición, México, D. F, 1987.
7. FASECOLDA. MORENO C., L. E., VALENCIA A., V. G. y CARO F., M. A. Identificación y solución de sitios críticos de accidentalidad en vías urbanas Bogotá, D.C. FASECOLDA. 1990. 140 pp.
8. Federal Highway Administration. Traffic Control Devices Handbook, Part IV – Signals, 1983.
9. FORERO M, José I. Estimación de parámetros para el modelo TRANSYT-7F en la ciudad de Medellín. Trabajo dirigido de grado para optar el título de ingeniero civil. Universidad Nacional de Colombia –
BIBLIOGRAFÍA
Sede Medellín. Facultad Nacional de Minas. Medellín. Colombia, 1999.
10. GAZIS y POTTS. “The Oversatured Intersection”, Proceedings of the Second International Symposium on the Theory of Traffic Flow, London, 1963, OECD, París, 1965.
11. GIBSON Jaime. Curso de Ingeniería de Tránsito, Popayán, Colombia, Universidad del Cauca, Maestría en Ingeniería de Tránsito y Transporte, Anotaciones del curso, 1988.
12. GOMEZ, D.; VALENCIA A., V. G. Y VILLAN R., F. Aplicación del programa TRANSYT para la optimización de semáforos en Colombia. Tesis de Maestría en Ingeniería de Tránsito y Transporte. Instituto e Vías. Popayán, COLOMBIA. 1988.
13. INMER. Folleto promocional de productos. México, D. F: 1994.
14. Institute of Transportation Engineers, “Small Area Detection at Intersection Approaches”, Traffic Engineering, Washington, D. C., 1974.
15. KELL, J. Y FULLERTON. Manual of Traffic Signal Design, Institute of Transportation Engineers, Prentice Hall, Englewodd Cliffs, NJ, 1982.
16. LONGLEY, “A Control Strategy for a Congested Computer-Controled Traffic Network”, Transportation Research, Pergamon Press, London, Noviembre, 1968.
17. Manual Interamericano sobre Dispositivos de Control del Tránsito. 1988.
18. MARTÍNEZ H., Carlos M. Control inteligente en intersecciones semaforizadas accionadas por el tránsito. Estudios de casos en Medellín. Trabajo Dirigido de Grado para optar el título de Ingeniero Civil. Universidad Nacional de Colombia – Sede Medellín. Medellín Colombia. 104 p. il. 1.999.
19. McSHANE, W.R., y ROESS, R. P. Traffic Engineering, 1ª ed., Englewood Cliffs, New Jersey. Prentice Hall, 1990. 660 p.
20. MORENO C., L. E., VALENCIA A., V. G., y CARO F., M A. Identificación y solución de sitios críticos de accidentalidad. Vías Urbanas. Primera edición, Santafé de Bogotá, D. C. Colombia. FASECOLDA. ACCION VIAL PREVENTIVA, 1990, 140 pp.
21. PARRIS. “NEMA and Traffic Control”, ITE Journal, Institute of Transportation Engineers, Washington, D. C., Agosto, 1986.
BIBLIOGRAFÍA
22. RADELAT E., G. Manual de ingeniería de tránsito. Gráficos Mundial, S. R. L.: Buenos Aires, 1964. xv + 526 pp.
23. RADELAT E., G. Curso sobre capacidad vial. Facultad de Minas, Universidad Nacional de Colombia – Sede Medellín, Unidad de vías y
s del curso, 16 al 20 de diciembre, 1991.
“Vehicle Detector Placement for High-Speed, ctuated Intersection Control”, Manual of Theory , Federal Highway Administration, Mayo, 1977.
TRÁNSITO Y TRANSPORTE DE SANTAFÉ DE CALDÍA MAYOR DE SANTAFÉ DE BOGOTÁ, D.C. ional de Tránsito. STT. Santafé de Bogotá, D. C.
transporte, apunte
24. SACKMAN et al.Isolated, Traffic-Aand Practice, Vol. 2
25. SECRETARÍA DEBOGOTÁ, D. C. AL(1996) Código NacColombia.
26. Tarnoff y Parsonson, Selecting Traffic Signal Control at Individual Intersections, NCHRP Report 233, Transportation Research Board, Washington, D. C. Junio, 1981.
27. TRANSPORTATION RESEARCH BOARD. Highway Capacity Manual. Special Report 209. National Research Council, Washington, D. C. 1985.
28. UNIVERSIDAD DE FLORIDA. Guía del usuario del TRANSYT-7F. Transportation Research Center. Federal Highway Administration. Gainesville. Florida. Estados Unidos de América. 1991.
29. U.S. BUREAU OF PUBLIC ROADS. Manual on Uniform Control Devices for Streets and Highways. Washington. U.S. Government Printing Office, 1988.
30. WEBSTER. (1966). Traffic Signals. Road research technical paper N° 56. Road Research Laboratory, London. Traducido al español por Ing. Luis Domínguez Pommerencke. Universidad Nacional Autónoma de México.
31. W. McShane y K. Crowley. Regularity of signal detectors – Observed arterial traffic volume characteristics, Transportation Research Record 596, Transportation Research Board, Washington, D. C. , 1976.
VÍCTOR GABRIEL VALENCIA ALAIX • Ingeniero civil. Universidad del Cauca. Popayán. 1985. • Magister en ingeniería de tránsito y transporte. Instituto de Postgrado en Vías
e Ingeniería Civil. Universidad del Cauca. Popayán. 1988. Tesis : Aplicación del programa computacional TRANSYT-7F para la optimización de semáforos en Colombia.
• Especialista en Optimización y Explotación de Sistemas de Transporte.
Universidad Politécnica de Valencia (España). Valencia. 1998. Tesina : Estudio de rampas en carreteras convencionales para la optimización del alineamiento y sus efectos operacionales, económicos y ambientales.
• Candidato a Ph. D. en Optimización y Explotación de Sistemas de Transporte.
Universidad Politécnica de Valencia (España)- Universidad Pedagógica y Tecnológica de Colombia. 2000.
• Profesor asociado. Departamento de ingeniería civil. Facultad de Minas.
Universidad Nacional de Colombia – Sede Medellín. Dirección: Calle 65 N° 78-28. Bloque M1. Oficina 224. Facultad de Minas. Universidad Nacional de Colombia - Sede Medellín. Teléfono: 57(4)4220022 (Extensión 5231ó 5227). Fax: 57(4)2341002 e-mail: [email protected] ó [email protected]