-
7/29/2019 Prob 23gdldd
1/14
4.8 EXAMPLES
PROBLEMA 1
Sever al ex amples of multiple- degree- of- frecdom systems,
(heir schematics, and equa
tions of motion are presented in this section. The art" in
vibration analysis and de
sign is often related to choosing an appropriate mathematical
model to describe agiven structure or machine. The follow ing ex
amples arc intended to provide additional 'practice in modeling and
analysis.
F.xumplc 4.8.1
A drive shaft for a holt- driven machine such as a lathe is
illustrated in Figure 4.21 (a). Thevibration model of this system
is indicated in Figure 4.21(b), along with a frce- body
diagram of the machine. Write the equations of motion in matrix
form and solve for the
= ^2~ ~ 10 kg m2/rad.A:i = k 2 m 1 0 ' N* m/rad. c = 2 N m s/rad
for zeroinitial conditions and where the applied moment M ( t ) is
a unit impulse function.
c(&2 - *,)
M03- 0j)
c(8j - 6 2 )
(h)
Figure 4.21 (a) Schematic of the moving pans of a lathe. The
bcannp that support
the routing shaft axe modeled as providing viscous damping while
tin. shaft* p
vide stiffness and the belt drive provides an applied unque
-
7/29/2019 Prob 23gdldd
2/14
S olution In Figure 4.21 (a) the bearings and shaft lubricant
arc modeled as lumped vis
cous damping, and the s hafts are modeled as torsional springs
.T he pulley and machine
disks are modeled as rotational inertias. T he motor is modeled
s imply as supplying a
moment to the pulley. Figure 4.21 (b) illustrates a free- body
diagram for each of the three
disks, where the damping is assumed to act in proportion to the
relative motion of
the masses and of the same value at each coordinate (other
damping models may bemore appropriate, but this choice yields an
easy form to solve).
Ex amining the free- body diagram of Figure 4.21(b) and summing
the moments on
each of the disks yields
= 9i) + 81)
J#i = * , ( , - e; ) + c(43- e ,) - * ,( e , - ,) - c(; -
6,)
3 " 9j) c(03 0;) + M ( l )
where 0 ,, 02, and 6, are the rotational coordinates as
indicated in Figure 4.21. T he unitfor B is radians* Rearranging
these equations yields
7j0i + c6| + /ct0, - c02 kxQ2 0
j 2ot + 2fe2 - cfl, - c03 + (*, + *2)o2 - AfjO, - *2, o
7,0, + C0J - c02 - k,0j + AtjBt = M(/)
In matnx form this becomes
y , o o
o j 2 o
o /, j
c - c 0I
1jt*
o
________________
0+ -c 2c -c 0 - f * , + * 2 - k2 0 0
0 c c- ^ ^2 _ - * ( ' L
where 0(/) - [ 0j(/) 02(f) )]r. Using the values for the
coefficientsously, this becomes given previ-
1 0 / 0 + 2
1 - 1
-
7/29/2019 Prob 23gdldd
3/14
Note that one of the eigenvalues is /ero.T hiis the matrix k is
singular. The physicalmeaning of this is interpreted in this ex
ample.T he normalized eigenvectors of K yield
0.5774 0.7071 0.4082 0.5774 0.5774 0.5774 p = 0.5774 0 - 0.8165
P T = 0.7071 0 - 0.7071
_ 0.5774 - 0.7071 0.4082 _ _ 0.4082 - 0.8165 0.4082
Further computation yields
P TC P = diag[ 0 0.2 0.6]
P r K P * diag[ 0 100 300]
P tM 1/2F(/) =
0.1826
- 0.2236
0.12918(/)
T he dec oupled modal equations are
? ,(/) 0.18265(f)
r2(l) + 0.2r , (f ) + 100r2(f) - - 0.22368(0
rs(/) +0.6r3(f) +300r}(f) - 0.12916(f)
Obviously,u>j *O.w* * 10 rad/s. and = 17.3205 rad,
*.Comparing coefficients of r, with 2C*>, yields the three modal
damping ratios
0.2
2( 10) "
0.6
0.01
0.017322(17.3205)
so that the second two modes arc underdamped. Hence the two
damped natural fre
quencies become
W(/2 = 2 V l ~ C ! * 9.9995 rad/s
= >v T ~ = 17.3179 rad/s
-
7/29/2019 Prob 23gdldd
4/14
-
7/29/2019 Prob 23gdldd
5/14
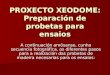
Figure 4.23 Res ponse of each of the disk* o f Figure 4.21 to an
impulse at 0, with
out the rigid- body mode, illustrating the v ibration that
occurs in each disk.
%T he three solutions 6 t(f ). e 2(/),a nd tt3(r) arc plotted in
Figure 4.22. Figure 4.23 plots the
three solutions without the rigid- body term. T his represents
the vibrations ex perienced
by each disk as it rotatct
-
7/29/2019 Prob 23gdldd
6/14
PROBLEMA 2
-
7/29/2019 Prob 23gdldd
7/14
since the springkxexperiences a displacementx - /,0 and
k2experiences a displacementjf + /jO. S imilaily. the velocity ex
perienced by the damper c, isx - /t0 and that of c2 isx 4- /20.
Taking moments about the ccnter of gravity yields
ye - c ,/,(i - /,8) - c ,/j( i + /;0 ) + - (, ) - k, lx + /;8)
(4.153)
where J mr. Here r is the radius of gyration of the vehicle
(recall Example 1.4.6).
liquations (4.152) and (4.153) can be rewritten as
mi + (c, + c2)jr + (/jCj - lxci)8 + (fc, + k3)x + (l2k2- Z,*,) *
0
/ wr e + (c2/2 c, / t )x + (f| c2 + / f cj e + (ft2/2 - Ac,/,X-v
+ (/f/c, + o (4. 154)
In matrix form, these two coupled equations become
/mT 1 ] * r c* + Cj ^ c2 ~ * -t i * * + ki ^ \ 01.0 L/zCj - t\C{
/f o + f f a j L M l - M l *1*1 + /!* ? _]
(4.155)
where the vector x is defined by
r * ( o
Led)]Reasonable values for a truck arc
r 0.64 irr m - 4000 kg c, = c 2 - 2000 N s/m
A, * k2* 20,000 N/m /, = 0.9 m l2 - 1.4 ra
With these values, equation (4.155) becomes
f 4000 0 1 _ . f-WXH) 1000~1 . f 40,000 10,000*] r o l
I. 0 2560J * + [_1000 5540 J ' + | _10,000 55,400 J * | _0J
(*
Nole that C =*(O.t )A',so that the damping is proportional. If a
momentM{t)is appliedto the angular coordinate 0(f) the equations of
motion become
I 4000 O ' ] , [*4000 10001 . ^ f 40,000 10,000 I = f 0 1 ,
L 0 2560 J X ^ |_1000 5540J * * [_ 10,000 55.400J X L m o Jv , ,
_
Following the usual procedures of modal analysis, calculation
ofM 1/1yields
M l/2
Thus
T 0.0158 0
0 0.0198 J
' (* 1.0000 0.31251 r = r 10000 3.1250*]
' L- 3125 2.1641 J am 13.1250 21.6406J
-
7/29/2019 Prob 23gdldd
8/14
Solving the eigenvalue problem for K yields
0.9698 0.24391 / '= ( "09698 "- 2439l0.2439 0.9698 J an
L0:24390.9698J
with e igenvalues = 9.2141 and \ 2 = 22.4265, so that the
natural frequencies arc
u>i 3.0355 rad/s and w2 = 4.7357 rad/s
Thus
P r /e/> =diag[9,2141 22.4265] and PrCI> * diag[ 0.9214
2.2426]
Comparing the elements ofF rC P to u>i and w2yields the modal
damping ratios
- S r 0 1 5 1 8 -
Usingthe formula from Window 4.7 for damped natural frequencies
yields
(*,, 3.0003 rad/s and 4.6009 rad/s. T he modal forces are
calculated from
rw i/r 0 1 r 0.0153 - 4 .S8 (0 ]r 0 ] r -4 .8 6( ,n
L()J L0.0039 19.2 8(1) JLM')J L*9.2 8(f) J
The decoupled modal equations become
r ,(/) + (0.9 21 4)r ,(f) + (9.2141 )r ,(f) = - 0.00488 (f)
r 2(/) + (2.2436 )/2(/) + (22.4265)r2(/) * 0.01 92 8(0
From equation (3.6) these have solutions
r , ) = " i A e - w S in = 7T T7, (3 .0 00 3/)/(ujr, (1 >(
3.0003)
= - 1.6066 e- * 7' sin (3.0003/)
r2(f) = sin (4.6(X>y,)
= 4 .1 6 5 9 ^'12* sin (4.6009/)
The solution in physical coordinates is obtained from
[ * ( 0
Led)
which yields
* (/) = - 2.41 X 10"V
-
7/29/2019 Prob 23gdldd
9/14
7
6
5
4
3
2
1
0
1
2
3
lime (s)
Figure 4.26 Plot of the bounce and pitch vibrations of the
vchicle of Figure 4.24 os
the result of the engine being shut off (in meter* versus
seconds).
fhese coordinates arc plotted in Figure 4.26.
-
7/29/2019 Prob 23gdldd
10/14
PROBLEMA 3
Fxamplc 4.8.3
T he punch press of Figure 4.27 can be modeled for vibration
analysis in the x direction
as indicated by the three- degrce- of- frecdom system of Figure
4.28. Discuss the solutionfor the response due to an impact at w,
using modal analysis.
Solution The mass and stiffness of the various components can be
easily approximated
using the static methods suggested in Chapter 1. However, it is
very difficult to estimate
values for the damping coefficients. Hence an educated guess is
made for the modaldamping ratios. Such guesses arc often made based
on experience or from measure
ments such as the logarithmic decrement. In this case the values
of various masses and
stiffness coefficients arc [ in mks units and /( f ) =
10006(f)]
mj 400 kg m2 * 2000 kg = 8000 kg
Arj = 300,000 N /m k} = 80,000 N/m * , = 800,000 N/m
X
Figure 4.27 Schematic of a purvch-press
machine.
bas*Isolation mounting pa
-
7/29/2019 Prob 23gdldd
11/14
Figure 4.28 Vibration model of the punch
press of Figure 4.27.
fr om frec- body diagrams of each mass, the s umming of forces
in thex direction yieldsthe three coupled equations
- - * ,( * ! - * 2) + / ( ' )
= ^ 3(^1 * 2) k x 2 * * j)
m3*3 - - * 3x* + k ^X i - at,)
Rewriting this set of coupled equations in matrix form
yields
-
7/29/2019 Prob 23gdldd
12/14
where x * ( * i ( f ) x2(t) Aj ( f )] r. Substituting the
numerical values for m, and k, yields
'0.4 0 0
(10) 0 2 0 x + (104)
0 0 8_
30 - 301
10006(f)
30 38 - 8 * = 0
0 - 8 88 1 0
Following the modal analysis procedure for an undamped system
yields
"20 0 0 0.0500 0 0
Mxn - 0 44.7214 0 M'K = 0 0.0224 0
_ 0 0 89.4427 _ L o 0 0.0112
and
K
750
- 335.4102
0
- 335.4102
190
- 20
Solving the eigenvalue problem for K yields
- 0.4116 - 0.1021 0.9056" '- 0 .41 16 - 0.8848 - 0.2185'
P - - 0.8848 0.1935 - 0.4239 PT - - 0.1021 - 0.1935 0.9758
.- 0.2185 0.9758 0.0106 _ 0.9056 - 0.4239 0.0106 _
and
X, = 29.0223
\2 = 113.9665
X3 = 907.0112
The modal force vector becomes
, - 5.3872
j = 10.6755
u3 - 30.1166
~ 10005(f)" "- 20.5805"
0 SB - 5.1026
0 45.2814 _
5(f)
Hcncc, ihc undamped modal equations arc
r,(f ) + 29.0223r,(f) = - 20.58058(f)F2(f) + 113.9665r2(/) - -
5.10265(f)
r ,(f ) 4- 907.0112r*(f) = 45.28145(f)
-
7/29/2019 Prob 23gdldd
13/14
To model the damping, note that each mode shape is dominated by
one element. From
examining the first column of the matrix P, the second element
is larger than the othertwo elements Hence if the system were
vibrating only in the first mode, the motion of
jr?(0 would dominate. T his element corresponds to the platform
mass, which receives
high damping from the rubber support. Hence it is given a large
damping ratio ofi, - 0.1(rubber provides a lot of damping).
Similarly, the second mode is dominated by its third
element, corresponding to the motion of s a predominantly metal
part, so itis given a low damping ratio of fc - 0.01. The third
mode shape is dominated by the
first element, which corresponds to the mounting pad. Hence it
is given a medium damp
ing ratio of = 0.05. Recalling that the velocity coefficient in
modal coordinates hasthe form 2& w,, the damped modal
coordinates bccome 2:to, = 2(0.1 )(5.387 2),
2 ^ 2 = 2(0.01)(10.6755), and 2fcw3 2(0.05)(30.116 6).T here
fore, the damped modal
equations become
r,(/) + 1.0774?,(I) + 29.0223r,(r) = - 20.58055(f)
r2(f ) + 0.2135r->(f) + U3.9665/- 2(r) - - 5.102 68 (f)
r3(/) + 3.0117r,(/) + 907.0112r(/) = 45.28148(f)
These have solutions given by equation (3.6) as
r,(f) = - 3X3956- *** sin (5.3602/)
r2(f) = - 0.4780e'alt**' sin ( 10.6750r)
r ,( f) = 1.5054e-1sos' sin (30.0789:)
Using the transformation x (/) = M' - zPr(i) yields
A,( f) * 0.0790e~05587' sin (53602/) + 0.0024e'aM* s' sin (
I0.6750f) + 0.0682
-
7/29/2019 Prob 23gdldd
14/14
*l(')
0.10
0.05
0.00
-0.05
*}(')
Figure 4.29 Numerical s imulation of the vibration of the punch
press of figures 4 2 7
and 4.28 as the result of the machine tool impacting the tool
base.
I his ex ample illustrates a method of ass igning modal damping
to an analytical
mode l.T his is a somewhat arbitrary proc edure that falls in
the category of an educated
guess. A more s ophisticated method is to measure the modal
damping.T his is discussedin Chapter 7. Note that the floor,
.t3(/), vibrates much longer than the machine parts do.
T his is something to consider in des igning how and where the
machine is mounted to thefloor of a buildinc.