Embed Size (px)
Citation preview
POLITECHNIKA WROCŁAWSKA INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH
PROGRAMOWANIE W ŚRODOWISKU MATLAB ZESTAW INSTRUKCJI DO LABORATORIUM
Opracował: mgr inż. Piotr Derugo
Dokument zawiera listę instrukcji do zajęć laboratoryjnych z przedmiotu Programowanie w środowisku MATLAB ARR023204L Wrocław 2013

Programowanie w
1. Wprowadzenie do programu Matlab.
Wstęp teoretyczny:
Program MATLAB (MATrix LABoratory) jest pakietem pozwalajna łatwe i szybkie wykonywanie złoobliczeń numerycznych, oraz graficzne prezentowanie wyników. Oprogramowanie daje użytkownikowi mokorzystania z wielu wbudowanych funkcji obliczeniowych. Ponadto drozbudowanych bibliotek pozwala na łatwe rozwiązywanie złożonych problemów inżynierskich bez konieczności znajomoszczegółowej wiedzy z zakresu danej dziedziny.
MATLAB jest oprogramowaniem komercyjnym, producentem jest firma „The MathWorks Incorporated” [www.mathworks.com].
Wymagania wstępne:
Student rozpoczynają„Wprowadzenie do programowania Matlab” powinien posiadaćzakresu: -podstaw obsługi komputera PC,
Nowy m-plikBierzący katalog
Programowanie w środowisku MATLAB ARR023204L
Wprowadzenie do programu Matlab.
p teoretyczny:
MATLAB (MATrix LABoratory) jest pakietem pozwalającym na łatwe i szybkie wykonywanie złożonych
oraz graficzne Oprogramowanie
ytkownikowi możliwość korzystania z wielu wbudowanych funkcji
Ponadto dostępność rozbudowanych bibliotek pozwala na łatwe
żonych problemów ści znajomości
szczegółowej wiedzy z zakresu danej
jest oprogramowaniem komercyjnym, producentem jest firma
Works Incorporated”
ępne:
Student rozpoczynający kurs Wprowadzenie do programowania
powinien posiadać wiedzę z
podstaw obsługi komputera PC,
-podstaw programowania,-podstawy opisu obiektów liniowych oranieliniowych, -algebry macierzy.
Wiedza uzyskana w czasie laboratorium
Podczas zajęćstudentowi zostaje przedstawiony regulamin BHP laboratorium planem zajęć laboratoryjnych. pierwszych zajęć laboratoryjnych studentzostaje zapoznany z oknem programu Matlab. Uczy się ręmacierze, wektory i zmienne oraz poznaje zasady składni podstawowych operacji arytmetycznych.
Funkcje używane w czasie laboratorium:
zmienna: a=a1 wektor: A=[a1, a2, a3, a4]; macierz: A=[a11, a12 ; a21, a22]; Operacje arytmetyczne: +; - ; /; *; ^; ./; .*; .^
Okno Poleceń Historia
Przestrzeń robocza
Ścieżka do folderu
Nowy model SimulinkBierzący katalog
rodowisku MATLAB ARR023204L
podstaw programowania, podstawy opisu obiektów liniowych oraz
Wiedza uzyskana w czasie laboratorium
Podczas zajęć wstępnych studentowi zostaje przedstawiony regulamin BHP laboratorium wraz z
laboratoryjnych. W trakcie ęć laboratoryjnych student
z oknem programu ę ręcznie definiować
macierze, wektory i zmienne oraz poznaje zasady składni podstawowych operacji
ywane w czasie laboratorium:
Historia
Przestrzeń robocza

Programowanie w
2. Działania na wektorach i macierzach arytmetyczne.
Wstęp teoretyczny:
Wektory i macierze w można tworzyć ręcznie poprzez podawanie poszczególnych ich wyrazówautomatycznie za pomocąautomatycznych generacji.
Innym sposobem jest tworzenie wektorów i macierzy budująistniejących danych, lub wykorzystujmieszanki powyższych technik.
Wymagania wstępne:
Student rozumie pojęi macierzy. Zna podstawy rachunku macierzowego i rozumie różnice pominimi. Student zna podstawy nawigacji w środowisku MATLAB.
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student poznaje sposoby tworzenia oraz łwektorów i macierzy.
Student poznaje podstawowe działania na macierzach i wektorach, zna warunki jakie musza spełniaćposzczególnych funkcji.
Funkcje używane w czasie laboratorium:
Definiowanie wektora X=[2, 5, 9 ,12] Definiowanie wektora kolumnowegoY=[1; 2; 3; 4] Lub Y=[1 2 3 4]’ Automatyczne tworzenie wektorów:A=start:skok:stop; linspace, logspace; Automatyczne tworzenie macierzy:
Programowanie w środowisku MATLAB ARR023204L
Działania na wektorach i macierzach – podstawowe operacje
p teoretyczny:
Wektory i macierze w MATLABie cznie poprzez podawanie
poszczególnych ich wyrazów, lub automatycznie za pomocą funkcji
Innym sposobem jest tworzenie wektorów i macierzy budując je z już
lub wykorzystując szych technik.
ępne:
udent rozumie pojęcie wektora macierzy. Zna podstawy rachunku
żnice pomiędzy nimi. Student zna podstawy nawigacji w
Wiedza uzyskana w czasie laboratorium
torium student poznaje sposoby tworzenia oraz łączenia
Student poznaje podstawowe macierzach i wektorach, zna
warunki jakie musza spełniać argumenty
ywane w czasie laboratorium:
Definiowanie wektora kolumnowego
Automatyczne tworzenie wektorów:
tworzenie macierzy:
ones, zeros, eye, magic, hilb, pascalrandn, Odczytywanie wartości z macierzy:A(w,k) ; A(:,k); A(w,:) A(w,k1:k2); A(w1:w2; k1:k2)A; A(:,:) disp(A) Inne funkcje: length, size; diag, inv, rot90
Zadania do samodzielnego wykonania
Sprawdź działanie poleceńt=0:0.01:2*pi; sin(t); plot(t,sin(t)); Wygeneruj: a)Macierz jednostkową rzęb)Macierz losową rzędu 4c)Wektor 20 znaków od 0 do 2pomocą polecenia linspaced)Wektor kolumnowy wartopowyższej macierzy Stwórz macierz której pierwsza kolumna jest pierwszym wierszem macierzy a),druga kolumna jest 3. kolumnb), trzecia kolumna jest pierwszymi 4. wyrazami wektora c), 4ostatnimi wyrazami kolumny d). W celu utrwalenia wiedzy sprawddziałanie wszystkich działaarytmetycznych z poprzednich zaj +; - ; /; *; ^; ./; .*; .^
rodowisku MATLAB ARR023204L
podstawowe operacje
ones, zeros, eye, magic, hilb, pascal, rand,
ści z macierzy:
A(w,k1:k2); A(w1:w2; k1:k2)
size; diag, inv, rot90, plot
Zadania do samodzielnego wykonania
działanie poleceń
ą rzędu 4 ą ędu 4
c)Wektor 20 znaków od 0 do 2π za linspace
d)Wektor kolumnowy wartości sinus
Stwórz macierz której pierwsza kolumna jest pierwszym wierszem macierzy a), druga kolumna jest 3. kolumną macierzy b), trzecia kolumna jest pierwszymi 4. wyrazami wektora c), 4. kolumna jest 4. ostatnimi wyrazami kolumny d).
W celu utrwalenia wiedzy sprawdź działanie wszystkich działań arytmetycznych z poprzednich zajęć

Programowanie w
3. Rozwiązywanie równa
Wstęp teoretyczny:
Środowisko MATLABwiele funkcji wspomagajużytkownika w rozwiązywaniu problemów algebraicznych związanych z macierzami i rozwiązywaniem układów liniowych.
Wymagania wstępne:
Przed zajęciami student powinien posiadać wiedzę z zakresu algebry macierzy oraz rozwiązywania układów równań liniowych. Student musi rozumiemacierzowy zapis układu równań
Wiedza uzyskana w czasie laboratorium
W trakcie zajęć student zapoznaje się z metodami rozwiązywania równaliniowych w środowisku Nabywa praktyczne umiejętnośkonstruowania zapisu macierzowego układów równań. Poznaje funkcje działana wielomianach.
Funkcje używane w czasie laboratorium:
det(a) – oblicza wyznacznik macierzyrank(a) – oblicza rząd macierzy eig(a) – oblicza wartości własne macierzyinv(a) – wyznacza macierz odwrotnfzero – miejsca zerowe funkcjifminbnd – minimum funkcji na przedzialefminsearch – minimum funkcju przy określonycm punkcie startu a=poly(r) – wektor współczynników wielomianu p=polyval(a, x0) – wartość wielomianu w punkcie x0
r=roots(a) – pierwiastki wielomianu
Programowanie w środowisku MATLAB ARR023204L
ązywanie równań liniowych.
p teoretyczny:
MATLAB oferuje wspomagających
ązywaniu problemów ązanych z macierzami
zywaniem układów liniowych.
ępne:
ciami student powinien z zakresu algebry
ązywania układów Student musi rozumieć
macierzowy zapis układu równań.
laboratorium
ęć student zapoznaje ązywania równań
rodowisku MATLAB. ętności z zakresu
konstruowania zapisu macierzowego . Poznaje funkcje działań
ywane w czasie laboratorium:
oblicza wyznacznik macierzy d macierzy ści własne macierzy
wyznacza macierz odwrotną miejsca zerowe funkcji
minimum funkcji na przedziale minimum funkcju przy
wektor współczynników
ść wielomianu w
pierwiastki wielomianu
Zadania do samodzielnego wykonania
Rozwiąż układ równawynik:
� 4�� � 2�� �3�� � 5�� ��� � 2��
Oblicz miejsca zerowe, oraz minimum i maksimum lokalne na przedziale � 4 � 12.5� � 2���� � ��.
Wyznacz pierwiastki ���� � �� � 5 Oblicz wartość wielomianu y w
miejscu x0=7.5 dla funkcji zdefiniza pomocą wektora wielomianu jako a=[1 -
DLA AMBITNYCH Opracuj skrypt wyznaczaj
miejsca zerowe metodą Newtona.
rodowisku MATLAB ARR023204L
Zadania do samodzielnego wykonania
ąż układ równań i wyświetl
� �� � 1� 3�� � 2� � 3 �
Oblicz miejsca zerowe, oraz minimum i maksimum lokalne na 5 � dla funkcji
Wyznacz pierwiastki wielomianu 5�� � � � 1
ść wielomianu y w dla funkcji zdefiniowanej
wektora współczynników 2 0.5 4 0]
DLA AMBITNYCH
Opracuj skrypt wyznaczający ą Newtona.
Programowanie w
4. Różniczkowanie i całkowanie numeryczne. równań różniczkowych.
Wstęp teoretyczny:
Całkowanie oraz różniczkowanie spodstawowymi operacjami matematycznymi którymi posługuje siinżynier w swojej codziennej pracy.
Całka oznaczona, to powierzchni pomiędzy wykresem funkcjia osią x, na obszarze całkowania.sumuje się ze znakiem plus dla dodatnich wartości funkcji i minus dla ujemnych
� �����
��
Pochodna, zwana teżmówi natomiast o szybkości zmian funkcji względem zmian badanego argumentu.
� ��� � lim∆%→'���' � ∆��∆�
W praktyce inższczególnie elektryka, często spotyka siZasaniem rozwiązywania układów równaróżniczkowych, dzięki śMATLAB, istnieje możliwośćobliczania takich problemów.
Wymagania wstępne:
Student zna i rozumie pojoraz pochodnej. Rozumie związane z ich obliczeniami.
Wiedza uzyskana w czasie laboratorium
Podczas laboratorium student zapoznaje się z metodami rozwirównań różniczkowych pierwszego rzz warunkami początkowymi oraz układami takich równań.
Student zapoznaje sie takz metodami całkowania numerycznego.
Funkcje używane w czasie laboratorium:
inline('cos(x.^3)') – funkcji symbolicznych przy braku symbolic toolbox
Programowanie w środowisku MATLAB ARR023204L
niczkowanie i całkowanie numeryczne. Rozwiązywanie układów ń żniczkowych.
p teoretyczny:
żniczkowanie są podstawowymi operacjami matematycznymi którymi posługuje się
ynier w swojej codziennej pracy. Całka oznaczona, to pole
kresem funkcji, na obszarze całkowania. Pole to
ze znakiem plus dla dodatnich ci funkcji i minus dla wartości
Pochodna, zwana też różniczką ści zmian funkcji
argumentu. � � ���'�
W praktyce inżynierskiej, ęsto spotyka się z
zywania układów równań ę środowisku żliwość łatwego ępne:
zna i rozumie pojęcia całki oraz pochodnej. Rozumie zagadnienia
Wiedza uzyskana w czasie laboratorium
Podczas laboratorium student z metodami rozwiązywania
niczkowych pierwszego rzędu oraz układami
Student zapoznaje sie także metodami całkowania numerycznego.
ywane w czasie laboratorium:
definiowanie symbolicznych przy braku
syms x – definiowanie zmiennej symbolicznej z wykorzystaniem symbolic toolbox.
quad, quadl, dblquad,ode113 i inne z grup
tic, toc
Zadania do samodzielnego wykonania
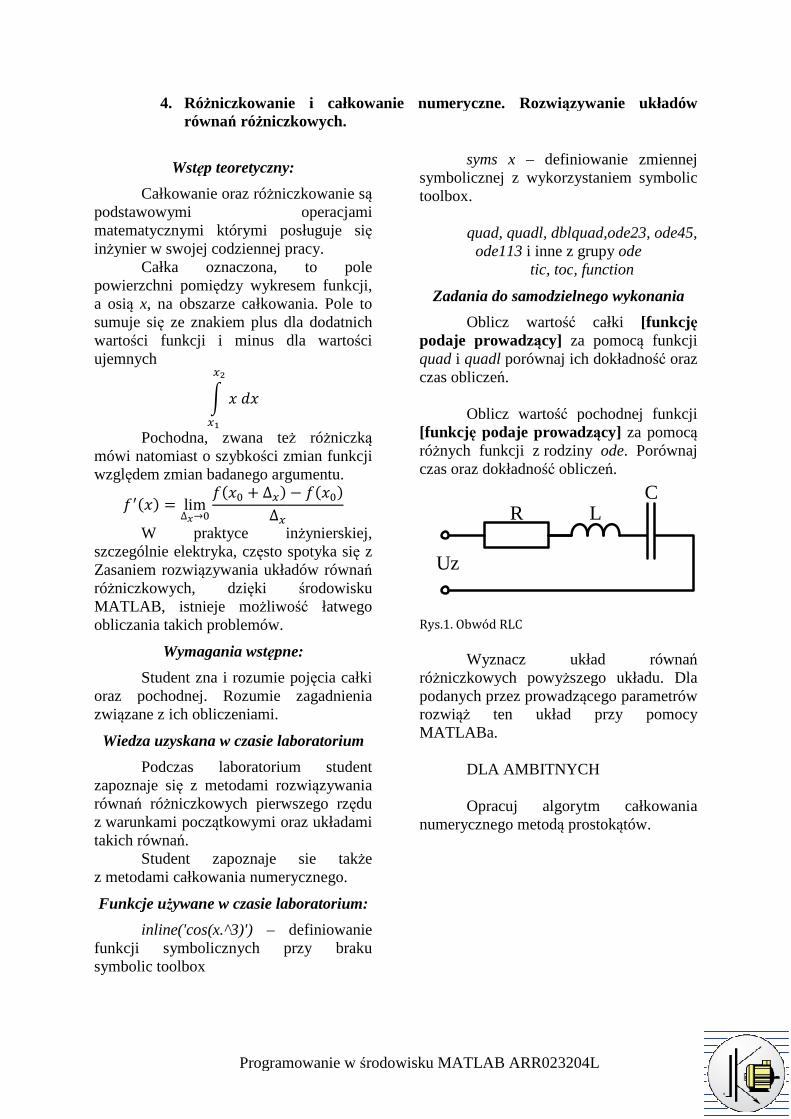
Oblicz wartośćpodaje prowadzący] za pomocquad i quadl porównaj ich dokładnoczas obliczeń.
Oblicz wartość pochodnej funkcji
[funkcj ę podaje prowadzróżnych funkcji z rodziczas oraz dokładność ob
R
Uz
Rys.1. Obwód RLC
Wyznacz układ równa
różniczkowych powyższego układu. podanych przez prowadząrozwiąż ten układ przy pomocy MATLABa.
DLA AMBITNYCH Opracuj algorytm całkowania
numerycznego metodą prostok
rodowisku MATLAB ARR023204L
Rozwiązywanie układów
niowanie zmiennej symbolicznej z wykorzystaniem symbolic
quad, quadl, dblquad,ode23, ode45, i inne z grupy ode tic, toc, function
Zadania do samodzielnego wykonania
ść całki [funkcj ę za pomocą funkcji
porównaj ich dokładność oraz
ść pochodnej funkcji podaje prowadzący] za pomocą
iny ode. Porównaj bliczeń.
LC
Wyznacz układ równań ższego układu. Dla
podanych przez prowadzącego parametrów ten układ przy pomocy
DLA AMBITNYCH
Opracuj algorytm całkowania prostokątów.

Programowanie w
5. Programowanie przy pomocy Mfunkcyjnych.
Wstęp teoretyczny:
Środowisko MATLABprogramowanie w trybie wsadowym, możliwe jest to dzięki m-skryptomfunkcjom. Kody obu typów pzapisywane są za pomocą mtypy pozwalają na budowanie rozbudowanych zestawów funkcji wykonywanych dokładnie tak jak by były kolejno programowane bezpoz konsoli.
Wymagania wstępne:
Student zna funkcje warunkowe oraz podstawowe operacje arytmetyczne występujące w MATLABietworzyć grafiki.
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student poznaje zasady tworzenia funkcyjnych oraz skryptowych. zasady ich tworzenia. Wie kiedy uposzczególnych typów.
Funkcje używane w czasie laboratorium:function, return, end, % (komentarz),
...(kontynuuj linie), disp, input, nargin, global
Programowanie w środowisku MATLAB ARR023204L
Programowanie przy pomocy M-plików skryptowych i M
p teoretyczny:
MATLAB umożliwia programowanie w trybie wsadowym,
skryptom oraz m-. Kody obu typów programów
m-plików. Oba na budowanie
rozbudowanych zestawów funkcji wykonywanych dokładnie tak jak by były
jno programowane bezpośrednio
ępne:
Student zna funkcje warunkowe oraz podstawowe operacje arytmetyczne
MATLABie . Potrafi
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student poznaje zasady tworzenia m-plików funkcyjnych oraz skryptowych. Rozumie zasady ich tworzenia. Wie kiedy używać
ywane w czasie laboratorium: % (komentarz),
...(kontynuuj linie), disp, input, nargin,
Zadania do samodzielnego wykonania
Napisz skryptpierwiastki równania kwadrZmienne a, b, c mają byćużytkownika (input), wywyświetlane przez program w formie tekstowej.
Stwórz funkcj ę
od ilości argumentów wejoblicza: dla 1 argumentu –dla 2 argumentów dla 3 argumentów dla 4+ argumentów
Stwórz funkcj ęzmienne globalne. Zmienna globalna zostaje zdefiniowana w obszarze roboczym. Funkcja w zaleparametru [1/2] oblicza i rysuje przebieg sin(t) lub cos(t).
rodowisku MATLAB ARR023204L
plików skryptowych i M -plików
Zadania do samodzielnego wykonania
skrypt obliczający pierwiastki równania kwadratowego.
ą być podawane przez ), wyniki mają być
przez program w formie
która w zależności i argumentów wejściowych
– jego kwadrat dla 2 argumentów – ich iloczyn
umentów – ich sumę dla 4+ argumentów – zwraca błąd.
funkcj ę wykorzystującą zmienne globalne. Zmienna globalna t zostaje zdefiniowana w obszarze roboczym. Funkcja w zależności od parametru [1/2] oblicza i rysuje przebieg

Programowanie w
6. Badanie układów regulacji opisanych transmitancjami. Wykrefunkcji.
Wstęp teoretyczny:
Transmitancja operatorowa stosunek transformaty Laplace'a sygnału wyjściowego do transformaty Laplace'a sygnału wejściowego układu przy zerowych warunkach poczOkreśla ona własności stacjonarnego układu liniowego.
Znajomość transmitancji układu regulacji automatycznej pozwala na łatwe badanie jego stabilności, która jest z kolei niezbędnym warunkiem pracy takiego układu.
Wymagania wstępne:
Student zna i rozumie pojtransmitancji operatorowej. Rozumipojęcia odpowiedzi skokowej i impulsowej. Rozumie pojęi biegunów transmitancji. kryteria stosuje się dla układów otwartych, a jakie dla zamkniętych.
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student poznaje praktyczne aspekty badaopisanych transmitancjami w śMatlab.
Programowanie w środowisku MATLAB ARR023204L
Badanie układów regulacji opisanych transmitancjami. Wykre
p teoretyczny:
Transmitancja operatorowa jest to stosunek transformaty Laplace'a sygnału
ciowego do transformaty Laplace'a go układu przy
zerowych warunkach początkowych. ści stacjonarnego
transmitancji układu ozwala na łatwe
ści, która jest z kolei dnym warunkiem pracy takiego
ępne:
Student zna i rozumie pojęcie transmitancji operatorowej. Rozumie
cia odpowiedzi skokowej pulsowej. Rozumie pojęcie zer
Wie, jakie dla układów otwartych,
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student poznaje praktyczne aspekty badań układów opisanych transmitancjami w środowisku
Funkcje używane w czasie laboratorium:
impulse, step, pzmap,
Zadania do samodzielnego wykonan
(�)� � )* �(�)� � +,)* �
(�)� � +-)+.). � +/)Gdzie in to i-ta cyfra indeksu.
Zbadaj powyższe transmitancje za pomocą wcześniej wspominanych funkcji.Badając powyższe oraz inne indywidualnie stworzone transmitancje okrejakie łączą położenie zer i biegunów na płaszczyźnie ze stabilnoregulacji automatycznej DLA AMBITNYCH
Opracuj m-funkcjokreślić stabilność zadaneKryterium stabilności do wyboru studenta.
rodowisku MATLAB ARR023204L
Badanie układów regulacji opisanych transmitancjami. Wykreślanie
ywane w czasie laboratorium:
impulse, step, pzmap,
Zadania do samodzielnego wykonania
-� *) � -
-� +/) � +*
) � +*)* � +0) � +,
cyfra indeksu.
ższe transmitancje za śniej wspominanych funkcji. ższe oraz inne indywidualnie
stworzone transmitancje określ zależności żenie zer i biegunów na
nie ze stabilnością układu
funkcję pozwalającą ść zadanej transmitancji. ści do wyboru studenta.

Programowanie w
7. Badanie stabilnoczęstotliwościowych.
Wstęp teoretyczny:
Charakterystyki częstotliwoukładu są jednym z metod opisu układów regulacji automatycznej. Pozwalajokreślić różne parametry układu, w tym stabilność.
W praktyce uzyskujemy je mierzsygnał wyjściowy układu przy zadanym wymuszeniu wejściowym o zmiennej pulsacji.
Wymagania wstępne:
Student zna pojęcia charakterystyk częstotliwościowych układu regulacji automatycznej. Zna pojęcie układu otwartego oraz zamkniętego.
Wiedza uzyskana w czasie laboratorium
Student poznaje możliwośMatlab w zakresie badania stabilnoukładów regulacji automatycznej. Potrafi tworzyć oraz czytać najczęściej stosowane charakterystyki częstotliwościowe.
Programowanie w środowisku MATLAB ARR023204L
Badanie stabilności układów regulacji. Analiza charakterystyk ściowych.
p teoretyczny:
ęstotliwościowe jednym z metod opisu układów
regulacji automatycznej. Pozwalają one ne parametry układu, w tym
W praktyce uzyskujemy je mierząc ciowy układu przy zadanym
ciowym o zmiennej
ępne:
ęcia charakterystyk ciowych układu regulacji
automatycznej. Zna pojęcie układu
Wiedza uzyskana w czasie laboratorium
żliwości pakiety Matlab w zakresie badania stabilności
regulacji automatycznej. Potrafi ęściej stosowane ściowe.
Funkcje używane w czasie laboratorium:
nyquist, bode, nichols, ord2
Zadania do samodzielnego wykonania
Stwórz m-skrypt który prosi użytkownika o podanie wektorów licznika oraz mianownika transmitancji.
Następnie skrypt ten ma sprawdzastabilność układu. charakterystyki Nyquista, bodego oraz Nicholsa.
Dla transmitancji podanych przez prowadzącego wykreśl ich charakterystyki częstotliwościowe oraz przeprowadanalizę porównawczą.
rodowisku MATLAB ARR023204L
ci układów regulacji. Analiza charakterystyk
ywane w czasie laboratorium:
, ord2, cloop Zadania do samodzielnego wykonania
skrypt który prosi ika o podanie wektorów licznika
oraz mianownika transmitancji. pnie skrypt ten ma sprawdzać
Wykreślać jego yquista, bodego oraz
Dla transmitancji podanych przez śl ich charakterystyki
ciowe oraz przeprowadź ich

Programowanie w
8. Wprowadzenie do Simulinka. Generowanie przebiegów. Wykreodpowiedzi układów opisanych transmitancjami na zdalne wymuszenia.
Wstęp teoretyczny:
MATLAB charakteryzuje sibudową modułową. Użytkownikzgodnie z własnymi wymaganiami dodawać odpowiednie biblioteki (Toolboxy). Wśród tych modułówsię rozszerzenie o nazwie Simulink. Posiada ono własny oddzielny interfejs graficzny, wykorzystując jednoczesilnik obliczeniowy oferowany przez samego MATLABa. Simulink pozwala na szeroko pojętą analizę systemów dynamicznych.
Wymagania wstępne:
Student posiada wiedzętransmitancji układów automatyki. Potrafi określić spodziewany przebieg odpna standardowe pobudzenia.
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student zapoznaje się z interfejsem śSimulink. Potrafi odnaleźć odpowiednie bloki w bibliotece. Potrafi generowaprzebiegi w Simulinku i eksportowaobszaru roboczego MATLABapodstawy konfiguracji parametrów symulacji.
Rys.1. Okno biblioteki Simulink
Programowanie w środowisku MATLAB ARR023204L
Wprowadzenie do Simulinka. Generowanie przebiegów. Wykreodpowiedzi układów opisanych transmitancjami na zdalne wymuszenia.
teoretyczny:
charakteryzuje się żytkownik może
zgodnie z własnymi wymaganiami odpowiednie biblioteki
modułów znajduje rozszerzenie o nazwie Simulink.
Posiada ono własny oddzielny interfejs ąc jednocześnie
silnik obliczeniowy oferowany przez Simulink pozwala na
ę systemów
ępne:
Student posiada wiedzę na temat transmitancji układów automatyki. Potrafi
iewany przebieg odpowiedzi
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student z interfejsem środowiska
źć odpowiednie bloki w bibliotece. Potrafi generować
inku i eksportować je do MATLABa. Zna
podstawy konfiguracji parametrów
Rys.2. Okno programu Simulink
Rys.3. Okno konfiguracji symulacji
Zadania do samodzielnego wykonania
Zamodelować w Simulink transmitancjeprowadzącego. Przykładowe transmitancje:
(�)� � �)(�)� � �)* �
(�)� � �/)* � .) zadać na ich wejście odpowiedZadać wymuszenia sinusoidalne, prostokątne trójkątne.
Wyplotować przebiegizmiennych z poziomu MATLABA
rodowisku MATLAB ARR023204L
Wprowadzenie do Simulinka. Generowanie przebiegów. Wykreślanie odpowiedzi układów opisanych transmitancjami na zdalne wymuszenia.
Okno programu Simulink
Rys.3. Okno konfiguracji symulacji
Zadania do samodzielnego wykonania
ć w środowisku imulink transmitancje podane przez
cego. Przykładowe transmitancje: -) � *� -� *) � .� -.)* � *) � -� ście odpowiedź skokową.
wymuszenia sinusoidalne,
ć przebiegi tych MATLABA .

Programowanie w
9. Badanie właściwodoboru nastaw regulatorów i ich wpływ na przebieg odpowiedzi na zadane wymuszenia.
Wstęp teoretyczny:
We współczesnej powszechnie wykorzystywane srodzaju regulatory. W trakcie zajzapoznaje się z możliwością symulowania układów regulacji w środowisku Simulink w celu uproszenia procesu projektowania takich układów.
Wymagania wstępne:
Student posiada wiedzęregulatorów typu P, PI, PD. Zna ich modele matematyczne oraz kryteria doboru nastaw tych regulatorów (np. ZiegleraNicholsa).
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student nabywa praktyczną wiedze na temat modelowania układów regulacji dla zadanych transmitancji. Potrafi dobieranastawy regulatorów przy pomocy odpowiednich kryteriów. Rozumie konieczność stosowania regulatorów w układach automatyki.
Programowanie w środowisku MATLAB ARR023204L
ściwości regulatorów liniowych P, PI ,PID. Wybrane kryteria doboru nastaw regulatorów i ich wpływ na przebieg odpowiedzi na zadane
p teoretyczny:
automatyce powszechnie wykorzystywane są różnego rodzaju regulatory. W trakcie zajęć student
ż ś ą symulowania środowisku Simulink
w celu uproszenia procesu projektowania
ępne:
posiada wiedzę na temat regulatorów typu P, PI, PD. Zna ich modele matematyczne oraz kryteria doboru nastaw tych regulatorów (np. Zieglera-
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student ą wiedze na temat
delowania układów regulacji dla . Potrafi dobierać
nastawy regulatorów przy pomocy odpowiednich kryteriów. Rozumie
stosowania regulatorów w
Użyte funkcje
[kgr,x,fosc,y]=margin(L,M);
Zadania do samodzielnego wykonania
Zamodelować regulatory P, PI, PID w środowisku Simulink, przebadaprzeanalizować ich odpowiedzi skokowe.
Zbadać wpływ nastaw regulatorów
na ich odpowiedz skokową Korzystając z metody Zieglera
Nicholsa obliczyć nastawy poszczególnych regulatorów dla układu o transmitancjipodanej przez prowadzącego, np.:
(�)� � �-). � *)zamodelować takie regulatory oraz
porównać wyniki skokowego.
rodowisku MATLAB ARR023204L
ci regulatorów liniowych P, PI ,PID. Wybrane kryteria doboru nastaw regulatorów i ich wpływ na przebieg odpowiedzi na zadane
yte funkcje
[kgr,x,fosc,y]=margin(L,M);
lnego wykonania
ć regulatory P, PI, PID rodowisku Simulink, przebadać i
ć ich odpowiedzi skokowe.
wpływ nastaw regulatorów na ich odpowiedz skokową.
ąc z metody Zieglera-ć nastawy poszczególnych
regulatorów dla układu o transmitancji przez prowadzącego, np.: -*)* � .) � /�
ć takie regulatory oraz dla pobudzenia

Programowanie w
10. Modelowanie prostych układów regulacji
11. Modelowanie prostych układów regulacji automatycznej. cz.2
Wstęp teoretyczny:
W świecie każdy proces rzeczywisty daje się opisaćrodzaju równaniami. Opisy takie pozwalajna symulacje, które z kolei pozwalajbadanie zjawisk które w normalnych warunkach ze względu na chociatempo, bardzo szybkie lub bardzo wolne, są niemożliwe do badania.
Wymagania wstępne:
Student zna podstawy obsługi środowiska Simulink. Rozumie opis procesu za pomocą równaróżniczkowych. Zna podstawowe układu regulatorów i potrafi je modelowa
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student zapoznaje się z budowmodelowaniem środowisku Simulink modeli matematycznych procesów deterministycznych zmiennych w
Zadania do samodzielnego wykonania
Dany jest opis matematyczny dziurawego wiadra. Do wiadra z kranu wlewana jest ciecz, w wiadrze jest dziura przez którą ciecz się wylewa. Tempo wylewania się wody jest wprost proporcjonalne do wysokości słupa ciecWiadro ma kształt walca o średnicy 20cm.
h
Wlew
Wylew
Programowanie w środowisku MATLAB ARR023204L
Modelowanie prostych układów regulacji automatycznej. cz.1+
Modelowanie prostych układów regulacji automatycznej. cz.2
p teoretyczny:
wiecie każdy proces ę opisać różnego
rodzaju równaniami. Opisy takie pozwalają na symulacje, które z kolei pozwalają na badanie zjawisk które w normalnych
ędu na chociażby na tempo, bardzo szybkie lub bardzo wolne,
ępne:
Student zna podstawy obsługi imulink. Rozumie opis
procesu za pomocą równań Zna podstawowe układu
regulatorów i potrafi je modelować.
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student dową oraz
rodowisku Simulink modeli matematycznych procesów deterministycznych zmiennych w czasie.
Zadania do samodzielnego wykonania
Dany jest opis matematyczny dziurawego wiadra. Do wiadra z kranu wlewana jest ciecz, w wiadrze jest dziura
ę wylewa. Tempo wody jest wprost
ści słupa cieczy. średnicy 20cm.
h
Wlew
Model procesu daje si
równaniem: 112 � 34∗ �6�
Gdzie: 34∗ �6�A-powierzchnia dna wiadra
Na jakim poziomie i po jaczasie ustali się poziom cieczy. Dane dotyczące przepływu podaje prowadz
Dany jest model dynamiczny
procesu wymiany ciepła pomia otoczeniem. �7�8 � 18 �7 � 7
Po ilu godzinach i na jakim poziomie ustali się temperatura wewndomu. 7' � �10; 7�6 � 0; � 2.8= � 5; 3 � 3 ∗ =pieca)
Do pieca dodano moduł regulacji (załącz / wyłącz). Zamodeluj regulator odpowiedniego typu. Temperaturpodaje prowadzący.
Dla układu regulacji automatycznej pieca jak na poprzednim zamodeluj układ regulacji ci
Uwzględnij dobowe zmiany temperatury otoczenia.
rodowisku MATLAB ARR023204L
automatycznej. cz.1
Modelowanie prostych układów regulacji automatycznej. cz.2
Model procesu daje się opisać � � � >∗ ∙ @�6� � � � ABC , >∗ � D
C;
powierzchnia dna wiadra Na jakim poziomie i po jakim
ę poziom cieczy. Dane ce przepływu podaje prowadzący.
Dany jest model dynamiczny procesu wymiany ciepła pomiędzy domem
� 7'� � ;3
Po ilu godzinach i na jakim ę temperatura wewnątrz
0� � 15; 8 � 5;= � 5 (wydajność
Do pieca dodano moduł regulacji . Zamodeluj regulator
odpowiedniego typu. Temperaturę zadaną
Dla układu regulacji automatycznej pieca jak na poprzednim ćwiczeniu zamodeluj układ regulacji ciągłej (Q-var)
ędnij dobowe zmiany

Programowanie w
12. Modelowanie nieliniowych układów regulacji.
Wstęp teoretyczny:
W świecie rzeczywistym wszystkie obiekty są obiektami nieliniowymi. Wynika to z bardzo ostrych ograniczedotyczących obiektów liniowych, miinnymi nieograniczoności wszelkich parametrów.
Układem nieliniowym nazywamy obiekt opisany nieliniowym równaniem różniczkowym, różnicowym, całkowym lub algebraicznym. Analiza takich układów nie należy do najprostszych i zazwyczaj jest analizą przybliżoną. Częuproszczenia tego zadania dokonuje sijego linearyzacji.
Programowanie w środowisku MATLAB ARR023204L
Modelowanie nieliniowych układów regulacji.
p teoretyczny:
wiecie rzeczywistym wszystkie obiektami nieliniowymi.
Wynika to z bardzo ostrych ograniczeń cych obiektów liniowych, między
ści wszelkich
Układem nieliniowym nazywamy obiekt opisany nieliniowym równaniem
nicowym, całkowym algebraicznym. Analiza takich układów
y do najprostszych i zazwyczaj ż ą. Często w celu
uproszczenia tego zadania dokonuje się
Wymagania wst
Student rozumie pojnieliniowego, zna przykłady prfunkcji nieliniowych.
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student poznaje metody modelowania nieliniowych układów regulacji.
Zadania do samodzielnego wykonania
Należy zamodelowasterowania dla obiektu podanego przez prowadzącego.
rodowisku MATLAB ARR023204L
Wymagania wstępne:
Student rozumie pojęcie układu nieliniowego, zna przykłady prostych
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student poznaje metody modelowania nieliniowych układów regulacji.
Zadania do samodzielnego wykonania
y zamodelować układ sterowania dla obiektu podanego przez

Programowanie w
13. Modelowanie obiektu opisanego za pomoctransmitancji operatorowych (np. silnika pr
Wstęp teoretyczny:
Jednym z często stosowanych w przemyśle siników, jest silnik bocznikowy prądu stałego. Fakt ten wynika z łatwokształtowania jego charakterystyk mechanicznych. W praktyce wykorzystywany jest między innymi w robotyce, napędach obrabiarek czy napędach wyciągowych.
Silnik bocznikowy prądaje się opisać poniższymi równaniami różniczkowymi:
7E �FG�6 � �FG � ;G�HG �7I �JK�6 � LMFM � N
Gdzie: ;G � OPQRPQ∙SPQ - współczynnik wzmocnienia
obwodu twornika silnika pradu stałego7E � TPSP - stała elektromagnetyczna obwodu
twornika
Wymagania wstępne:
Student powinien śsymulacyjne Simulink. Student powinien rozumieć opis obiektu za pomocróżniczkowych.
Programowanie w środowisku MATLAB ARR023204L
Modelowanie obiektu opisanego za pomocą równań różtransmitancji operatorowych (np. silnika prądu stałego SPS).
p teoretyczny:
ęsto stosowanych w siników, jest silnik bocznikowy
du stałego. Fakt ten wynika z łatwości kształtowania jego charakterystyk mechanicznych. W praktyce
ędzy innymi w dach obrabiarek czy
Silnik bocznikowy prądu stałego ższymi równaniami
LMJK� NU
współczynnik wzmocnienia
obwodu twornika silnika pradu stałego
tyczna obwodu
ępne:
Student powinien środowisko symulacyjne Simulink. Student powinien
opis obiektu za pomocą równań
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student nabywa praktyczną wiedzmodelowania obiektów opisanych równaniami różniczkowymi oraz za pomocą transmitancji operatorowych.
Zadania do samodzielnego wykonania
W trakcie laboratorium nalezamodelować schemat blokowy silnika obcowzbudnego prądu stałego w środowisku Simulink oraz przebadaodpowiedź na zadane wymuszenie skokowe. Parametry silnika podaje prowadzący ćwiczenia.
rodowisku MATLAB ARR023204L
ń różniczkowych oraz du stałego SPS).
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student ą wiedzę na temat
modelowania obiektów opisanych żniczkowymi oraz za
transmitancji operatorowych.
Zadania do samodzielnego wykonania
W trakcie laboratorium należy schemat blokowy silnika
obcowzbudnego prądu stałego w link oraz przebadać jego
na zadane wymuszenie skokowe. Parametry silnika podaje

Programowanie w
14. Badanie dynamiki układu regulacji automatycznej.
Wstęp teoretyczny:
Obiekty takie jak napelektryczne, aby rzeczywiśprzydatne w przemyśle oraz innych zastosowaniach, muszą być regulowane za pomocą różnego rodzaju układów regulacji automatycznej. Koniecznym jest jednocześnie aby układy te były optymalne pod względem różnych kryteriów, stkonieczność badania takich układów.
Wymagania wstępne:
Student posiada gotowy model napędu elektrycznego, na przykład silnika obcowzbudnego prądu stałego;. Student potrafi budować w środowisku układy regulacji automatycznej.
Programowanie w środowisku MATLAB ARR023204L
Badanie dynamiki układu regulacji automatycznej.
p teoretyczny:
Obiekty takie jak napędy elektryczne, aby rzeczywiście były
śle oraz innych ą ć regulowane za
nego rodzaju układów regulacji automatycznej. Koniecznym jest
nie aby układy te były optymalne nych kryteriów, stąd też
badania takich układów.
ępne:
Student posiada gotowy model elektrycznego, na przykład silnika
ądu stałego;. Student środowisku Simulink matycznej.
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student poznaje praktyczne aspekty działania układów regulacji automatycznej napelektrycznego.
Zadania do samodzielnego wykonania
W trakcie laboratorium nalezamodelować, a następnie przebadaregulacji automatycznej napelektrycznego.
rodowisku MATLAB ARR023204L
Wiedza uzyskana w czasie laboratorium
W trakcie laboratorium student poznaje praktyczne aspekty działania układów regulacji automatycznej napędu
Zadania do samodzielnego wykonania
W trakcie laboratorium należy pnie przebadać układ
regulacji automatycznej napędu

Programowanie w
Literatura
Literatura podstawowa
[1] Mrozek B., Mrozek Z., MATLAB
uniwersalne środowisko do obliczeń naukowo-technicznych, Wydawnictwo PLJ, Warszawa 1996
[2] Zalewski A., Cegieła R., MATLAB- obliczenia numeryczne ich zastosowanie, Nakom, Poznań1996
[3] Osowski S., Modelowanie układów dynamicznych z zastosowaniem języka SIMULINK, Oficyna Wydawnicza Politechniki Warszawskiej 1997
[4] Brzózka J., Ćwiczenia z automw matlabie i simulinku, Nikom 1997
Literatura uzupełniają
[1] Saadat H., Computational aids in
control systems using MATLAB, McGraw-Hill, Inc., New York 1993
[2] Ogata K., Solving control engineering problems with MATLAB, PRENTICE HALL, New Jersey 1993
Programowanie w środowisku MATLAB ARR023204L
Literatura podstawowa
Mrozek B., Mrozek Z., MATLAB środowisko do
technicznych, Wydawnictwo PLJ, Warszawa
Zalewski A., Cegieła R., obliczenia numeryczne
ich zastosowanie, Nakom,
Osowski S., Modelowanie układów dynamicznych z zastosowaniem
zyka SIMULINK, Oficyna Wydawnicza Politechniki
wiczenia z automatyki
w matlabie i simulinku, Nikom
Literatura uzupełniająca
Saadat H., Computational aids in control systems using MATLAB,
Hill, Inc., New York 1993
Ogata K., Solving control engineering problems with MATLAB, PRENTICE HALL,
rodowisku MATLAB ARR023204L




![środowisku języka strukturalnego 312[01].Z2.01 Poradnik ... · Programowanie w środowisku języka strukturalnego zawartego w modułowym programie nauczania dla zawodu technik informatyk](https://img.pdfslide.tips/doc/110x75/5f0bc5307e708231d432214b/rodowisku-jzyka-strukturalnego-31201z201-poradnik-programowanie-w-rodowisku.jpg)
























