Embed Size (px)
Citation preview
Omegageeks
Control Analógico
Página 1 de 27
Proyecto Carro inteligente con control Analógico.
Fecha: 04 de Diciembre del 2015
Omegageeks
Control Analógico
Página 2 de 27
Objetivo ....................................................................................................................................................................3
TEORÍA ......................................................................................................................................................................3
Amplificadores operacionales ..............................................................................................................................8
Circuitos básicos con operacionales. ....................................................................................................................9
1.-Amplificador no inversor. .............................................................................................................................9
2.-Amplificador inversor. ............................................................................................................................... 10
3.-Buffer o seguidor de voltaje. ..................................................................................................................... 10
4.-Restador. ................................................................................................................................................... 10
5.-Sumador .................................................................................................................................................... 11
DESARROLLO.......................................................................................................................................................... 12
Obtención de la función de transferencia por el método Experimental........................................................... 12
Diseño del control Proporcional ........................................................................................................................ 14
Diseño del control Derivativo ............................................................................................................................ 16
Diseño control Integral ...................................................................................................................................... 20
Circuito. ......................................................................................................................................................... 22
Acondicionamiento del sensor. ................................................................................................................. 22
Circuito Final .................................................................................................................................................. 26
Bibliografía ............................................................................................................................................................. 25
Omegageeks
Control Analógico
Página 3 de 27
Objetivo: El presente proyecto tiene como objetivo aterrizar los conocimientos adquiridos durante todo el cuatrimestre Septiembre-Diciembre en la clase de Teoría de control, con el fin de implementar un sistema con un control PID.
TEORÍA
Control
Un controlador PID es un mecanismo de control por realimentación ampliamente usado en sistemas
de control industrial. Este calcula la desviación o error entre un valor medido y un valor deseado.
El algoritmo del control PID consiste de tres parámetros distintos: el proporcional, el integral, y el
derivativo. El valor Proporcional depende del error actual. El Integral depende de los errores pasados
y el Derivativo es una predicción de los errores futuros. La suma de estas tres acciones es usada para
ajustar al proceso por medio de un elemento de control como la posición de una válvula de control o
la potencia suministrada a un calentador.
Control Proporcional
La parte proporcional consiste en el producto entre la señal de error y la constante proporcional para
lograr que el error en estado estacionario se aproxime a cero, pero en la mayoría de los casos, estos
valores solo serán óptimos en una determinada porción del rango total de control, siendo distintos los
valores óptimos para cada porción del rango. Sin embargo, existe también un valor límite en la
constante proporcional a partir del cual, en algunos casos, el sistema alcanza valores superiores a los
deseados. Este fenómeno se llama sobreoscilación y, por razones de seguridad, no debe sobrepasar el
30%, aunque es conveniente que la parte proporcional ni siquiera produzca sobreoscilación. Hay una
relación lineal continua entre el valor de la variable controlada y la posición del elemento final de
control (la válvula se mueve al mismo valor por unidad de desviación). La parte proporcional no
considera el tiempo, por lo tanto, la mejor manera de solucionar el error permanente y hacer que el
Omegageeks
Control Analógico
Página 4 de 27
sistema contenga alguna componente que tenga en cuenta la variación respecto al tiempo, es
incluyendo y configurando las acciones integral y derivativa.
Control Integral
El modo de control Integral tiene como propósito disminuir y eliminar el error en estado estacionario,
provocado por el modo proporcional. El control integral actúa cuando hay una desviación entre la
variable y el punto de consigna, integrando esta desviación en el tiempo y sumándola a la acción
proporcional. El error es integrado, lo cual tiene la función de promediarlo o sumarlo por un período
determinado; Luego es multiplicado por una constante Ki. Posteriormente, la respuesta integral es
adicionada al modo Proporcional para formar el control P + I con el propósito de obtener una
respuesta estable del sistema sin error estacionario.
Control Derivativo
La acción derivativa se manifiesta cuando hay un cambio en el valor absoluto del error; (si el error es
constante, solamente actúan los modos proporcional e integral).
El error es la desviación existente entre el punto de medida y el valor consigna, o "Set Point".
La función de la acción derivativa es mantener el error al mínimo corrigiéndolo proporcionalmente
con la misma velocidad que se produce; de esta manera evita que el error se incremente.
Se deriva con respecto al tiempo y se multiplica por una constante D y luego se suma a
las señales anteriores (P+I). Es importante adaptar la respuesta de control a los cambios en el sistema
ya que una mayor derivativa corresponde a un cambio más rápido y el controlador puede responder
acordemente.
Omegageeks
Control Analógico
Página 5 de 27
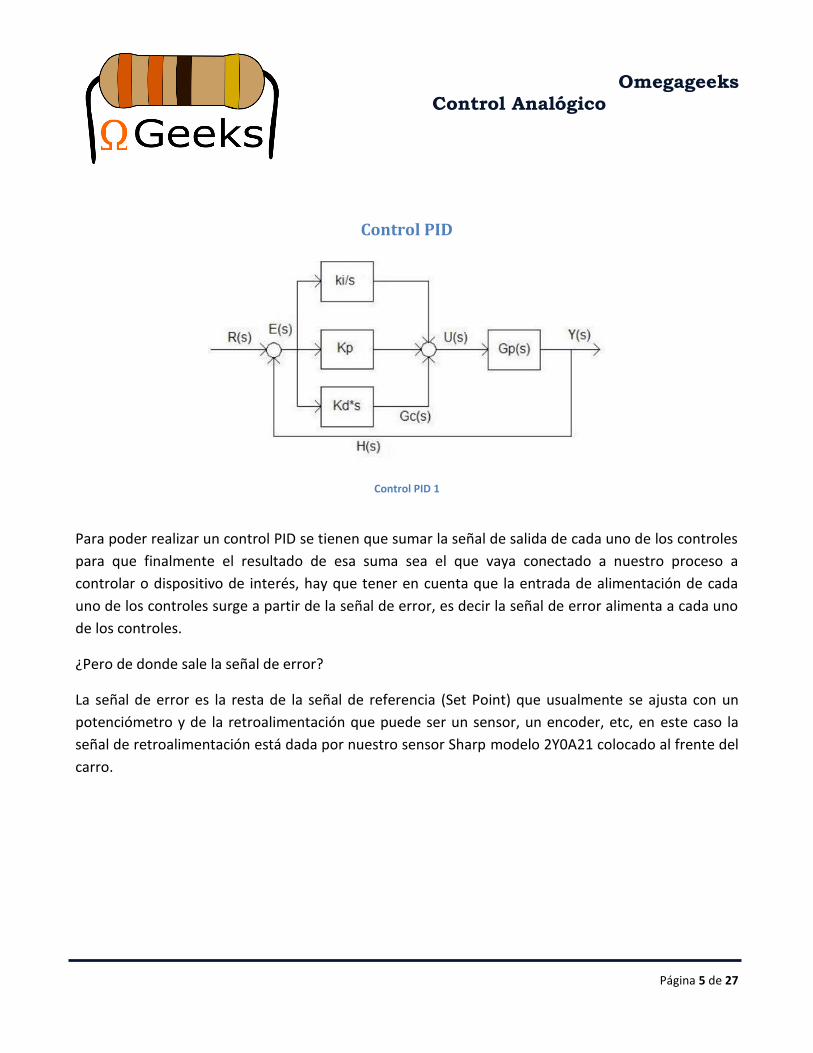
Control PID
Control PID 1
Para poder realizar un control PID se tienen que sumar la señal de salida de cada uno de los controles
para que finalmente el resultado de esa suma sea el que vaya conectado a nuestro proceso a
controlar o dispositivo de interés, hay que tener en cuenta que la entrada de alimentación de cada
uno de los controles surge a partir de la señal de error, es decir la señal de error alimenta a cada uno
de los controles.
¿Pero de donde sale la señal de error?
La señal de error es la resta de la señal de referencia (Set Point) que usualmente se ajusta con un
potenciómetro y de la retroalimentación que puede ser un sensor, un encoder, etc, en este caso la
señal de retroalimentación está dada por nuestro sensor Sharp modelo 2Y0A21 colocado al frente del
carro.
Omegageeks
Control Analógico
Página 6 de 27
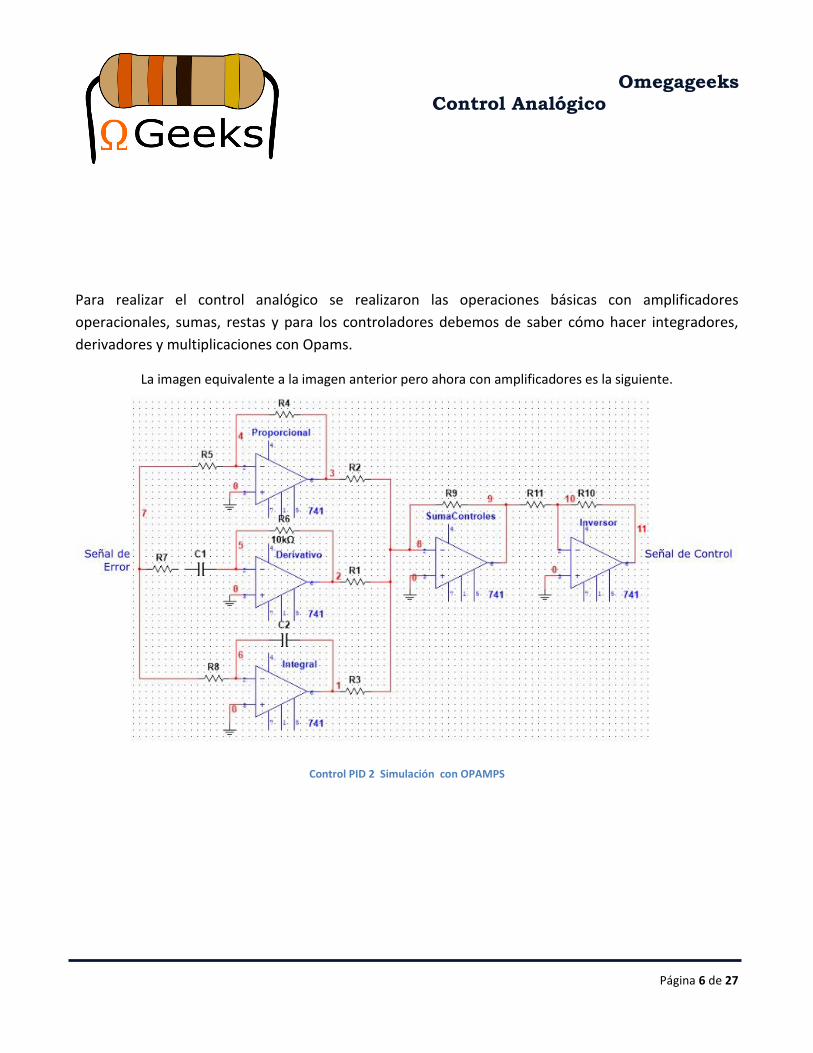
Para realizar el control analógico se realizaron las operaciones básicas con amplificadores
operacionales, sumas, restas y para los controladores debemos de saber cómo hacer integradores,
derivadores y multiplicaciones con Opams.
La imagen equivalente a la imagen anterior pero ahora con amplificadores es la siguiente.
Control PID 2 Simulación con OPAMPS
Omegageeks
Control Analógico
Página 7 de 27
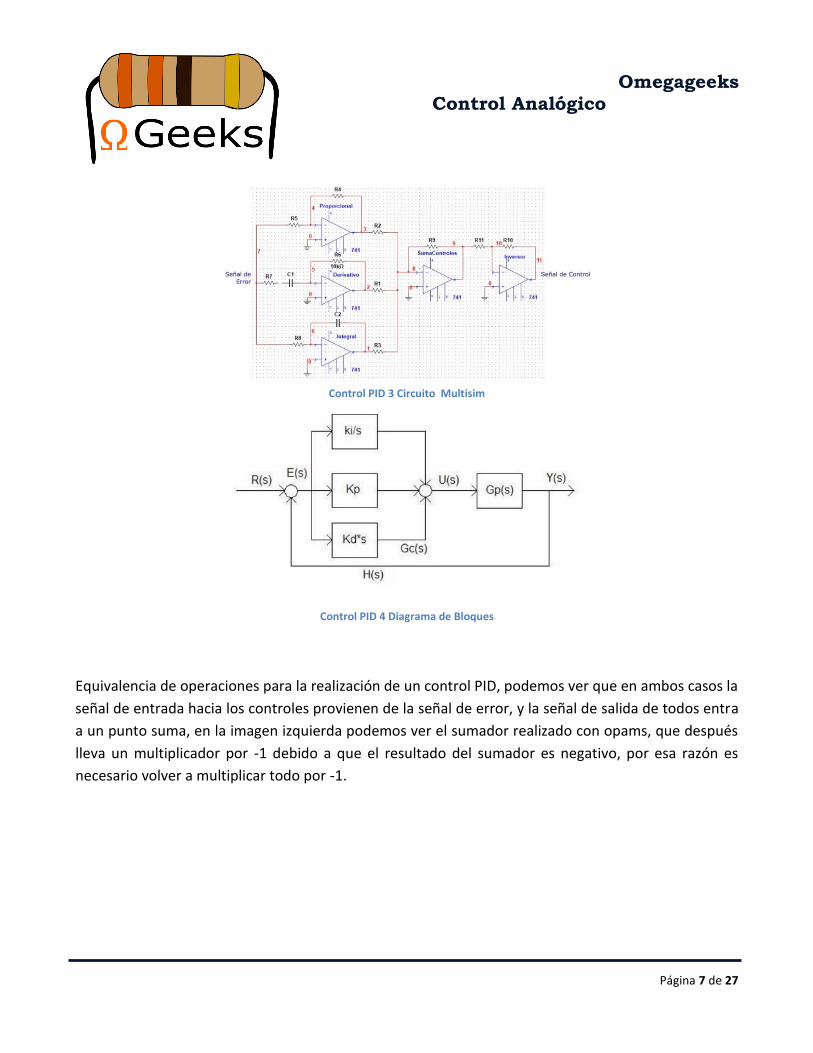
Control PID 3 Circuito Multisim
Control PID 4 Diagrama de Bloques
Equivalencia de operaciones para la realización de un control PID, podemos ver que en ambos casos la
señal de entrada hacia los controles provienen de la señal de error, y la señal de salida de todos entra
a un punto suma, en la imagen izquierda podemos ver el sumador realizado con opams, que después
lleva un multiplicador por -1 debido a que el resultado del sumador es negativo, por esa razón es
necesario volver a multiplicar todo por -1.
Omegageeks
Control Analógico
Página 8 de 27
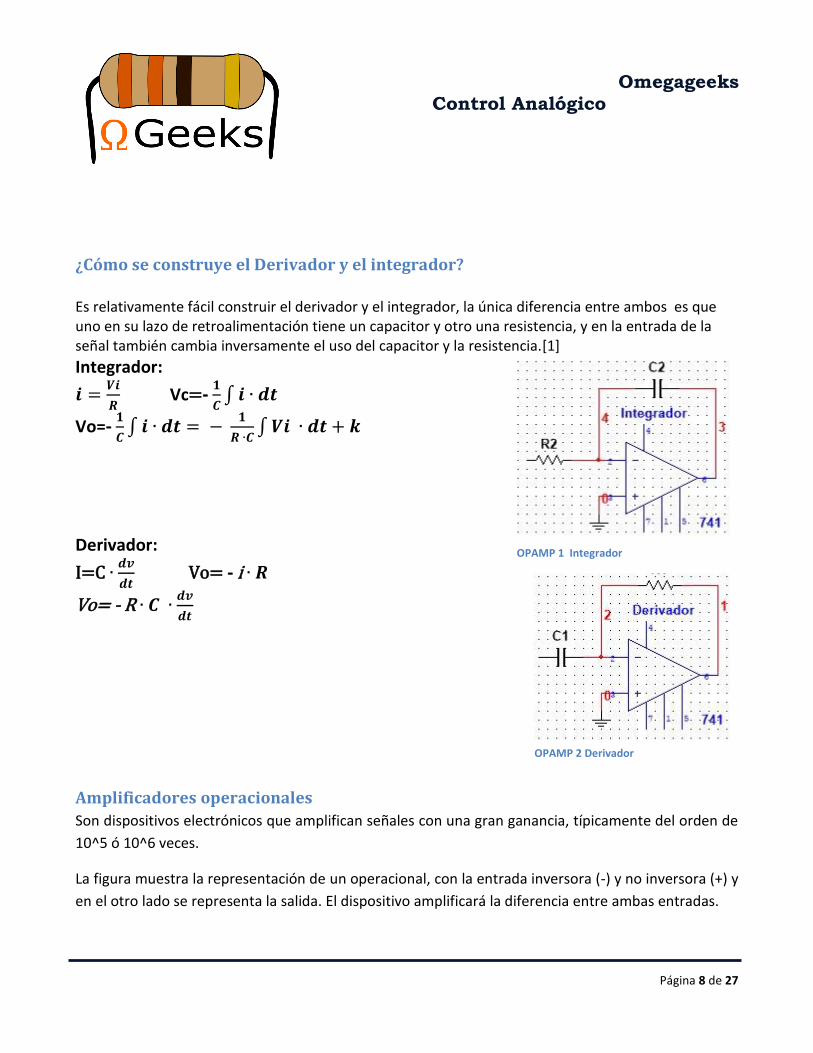
¿Cómo se construye el Derivador y el integrador?
Es relativamente fácil construir el derivador y el integrador, la única diferencia entre ambos es que uno en su lazo de retroalimentación tiene un capacitor y otro una resistencia, y en la entrada de la señal también cambia inversamente el uso del capacitor y la resistencia.[1]
Integrador:
𝒊 =𝑽𝒊
𝑹 Vc=-
𝟏
𝑪∫ 𝒊 ∙ 𝒅𝒕
Vo=- 𝟏
𝑪∫ 𝒊 ∙ 𝒅𝒕 = −
𝟏
𝑹 ∙𝑪∫ 𝑽𝒊 ∙ 𝒅𝒕 + 𝒌
Derivador:
I=C ∙𝒅𝒗
𝒅𝒕 Vo= - i ∙ 𝑹
Vo= - R ∙ 𝑪 ∙𝒅𝒗
𝒅𝒕
Amplificadores operacionales
Son dispositivos electrónicos que amplifican señales con una gran ganancia, típicamente del orden de
10^5 ó 10^6 veces.
La figura muestra la representación de un operacional, con la entrada inversora (-) y no inversora (+) y
en el otro lado se representa la salida. El dispositivo amplificará la diferencia entre ambas entradas.
OPAMP 1 Integrador
OPAMP 2 Derivador
Omegageeks
Control Analógico
Página 9 de 27
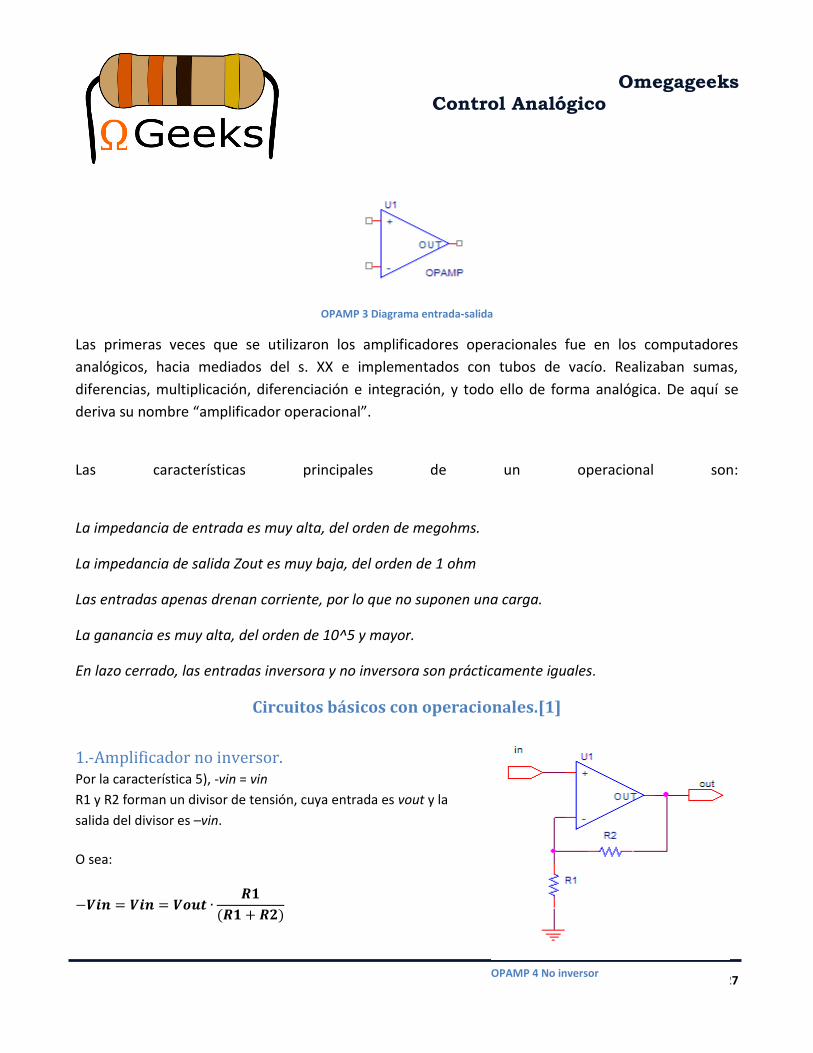
OPAMP 3 Diagrama entrada-salida
Las primeras veces que se utilizaron los amplificadores operacionales fue en los computadores
analógicos, hacia mediados del s. XX e implementados con tubos de vacío. Realizaban sumas,
diferencias, multiplicación, diferenciación e integración, y todo ello de forma analógica. De aquí se
deriva su nombre “amplificador operacional”.
Las características principales de un operacional son:
La impedancia de entrada es muy alta, del orden de megohms.
La impedancia de salida Zout es muy baja, del orden de 1 ohm
Las entradas apenas drenan corriente, por lo que no suponen una carga.
La ganancia es muy alta, del orden de 10^5 y mayor.
En lazo cerrado, las entradas inversora y no inversora son prácticamente iguales.
Circuitos básicos con operacionales.[1]
1.-Amplificador no inversor. Por la característica 5), -vin = vin
R1 y R2 forman un divisor de tensión, cuya entrada es vout y la
salida del divisor es –vin.
O sea:
−𝑽𝒊𝒏 = 𝑽𝒊𝒏 = 𝑽𝒐𝒖𝒕 ∙𝑹𝟏
(𝑹𝟏 + 𝑹𝟐)
OPAMP 4 No inversor
Omegageeks
Control Analógico
Página 10 de 27
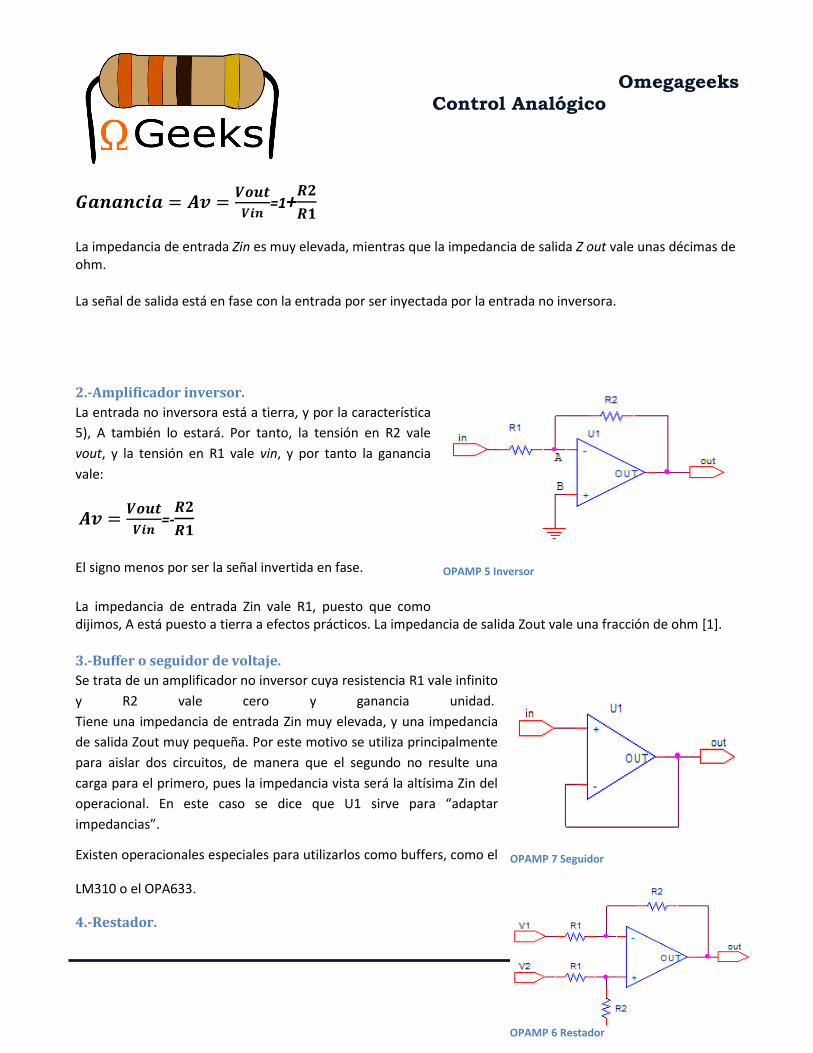
𝑮𝒂𝒏𝒂𝒏𝒄𝒊𝒂 = 𝑨𝒗 =𝑽𝒐𝒖𝒕
𝑽𝒊𝒏=1+
𝑹𝟐
𝑹𝟏
La impedancia de entrada Zin es muy elevada, mientras que la impedancia de salida Z out vale unas décimas de ohm.
La señal de salida está en fase con la entrada por ser inyectada por la entrada no inversora.
2.-Amplificador inversor.
La entrada no inversora está a tierra, y por la característica
5), A también lo estará. Por tanto, la tensión en R2 vale
vout, y la tensión en R1 vale vin, y por tanto la ganancia
vale:
𝑨𝒗 =𝑽𝒐𝒖𝒕
𝑽𝒊𝒏=-
𝑹𝟐
𝑹𝟏
El signo menos por ser la señal invertida en fase.
La impedancia de entrada Zin vale R1, puesto que como dijimos, A está puesto a tierra a efectos prácticos. La impedancia de salida Zout vale una fracción de ohm [1].
3.-Buffer o seguidor de voltaje.
Se trata de un amplificador no inversor cuya resistencia R1 vale infinito
y R2 vale cero y ganancia unidad.
Tiene una impedancia de entrada Zin muy elevada, y una impedancia
de salida Zout muy pequeña. Por este motivo se utiliza principalmente
para aislar dos circuitos, de manera que el segundo no resulte una
carga para el primero, pues la impedancia vista será la altísima Zin del
operacional. En este caso se dice que U1 sirve para “adaptar
impedancias”.
Existen operacionales especiales para utilizarlos como buffers, como el
LM310 o el OPA633.
4.-Restador.
OPAMP 5 Inversor
OPAMP 7 Seguidor
OPAMP 6 Restador
Omegageeks
Control Analógico
Página 11 de 27
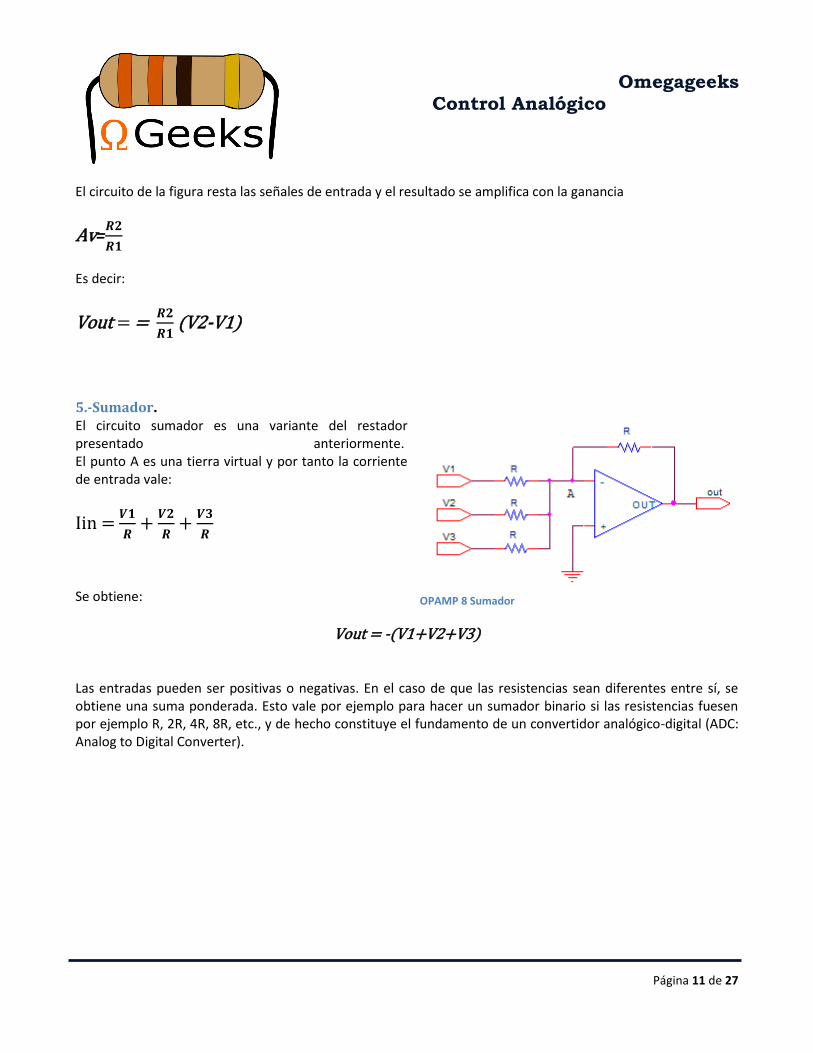
El circuito de la figura resta las señales de entrada y el resultado se amplifica con la ganancia
Av=𝑹𝟐
𝑹𝟏
Es decir:
Vout = = 𝑹𝟐
𝑹𝟏 (V2-V1)
5.-Sumador. El circuito sumador es una variante del restador presentado anteriormente. El punto A es una tierra virtual y por tanto la corriente de entrada vale:
Iin = 𝑽𝟏
𝑹+
𝑽𝟐
𝑹+
𝑽𝟑
𝑹
Se obtiene:
Vout = -(V1+V2+V3)
Las entradas pueden ser positivas o negativas. En el caso de que las resistencias sean diferentes entre sí, se obtiene una suma ponderada. Esto vale por ejemplo para hacer un sumador binario si las resistencias fuesen por ejemplo R, 2R, 4R, 8R, etc., y de hecho constituye el fundamento de un convertidor analógico-digital (ADC: Analog to Digital Converter).
OPAMP 8 Sumador
Omegageeks
Control Analógico
Página 12 de 27
DESARROLLO Para poder desarrollar el cálculo de los diversos controladores se necesita conocer el comportamiento natural del sistema, es decir conocer su función de transferencia, una vez obteniéndola es posible calcular cada uno de los controladores, cabe señalar que se pueden calcular controladores PI, PD PID, pero nunca un controlador DI, es decir, se necesita siempre un controlador proporcional. Veamos el caso en el que solamente coloquemos un controlador derivativo, nuestro sistema no funcionaria, pues sin el controlador proporcional antes, el derivativo tendería a 0 debido a que la señal que estaría derivando siempre sería la misma y recordemos que la derivada de una constante es cero.
Obtención de la función de transferencia por el método Experimental
Se colocó la punta del osciloscopio a nuestra señal de retroalimentación, en este caso el sensor Sharp, y graficar la señal con un impulso escalón de tensión. ¿Cómo realizamos un impulso escalón?
Se explicará cómo se realizó un impulso escalón para el sistema
Omegageeks
Control Analógico
Página 13 de 27
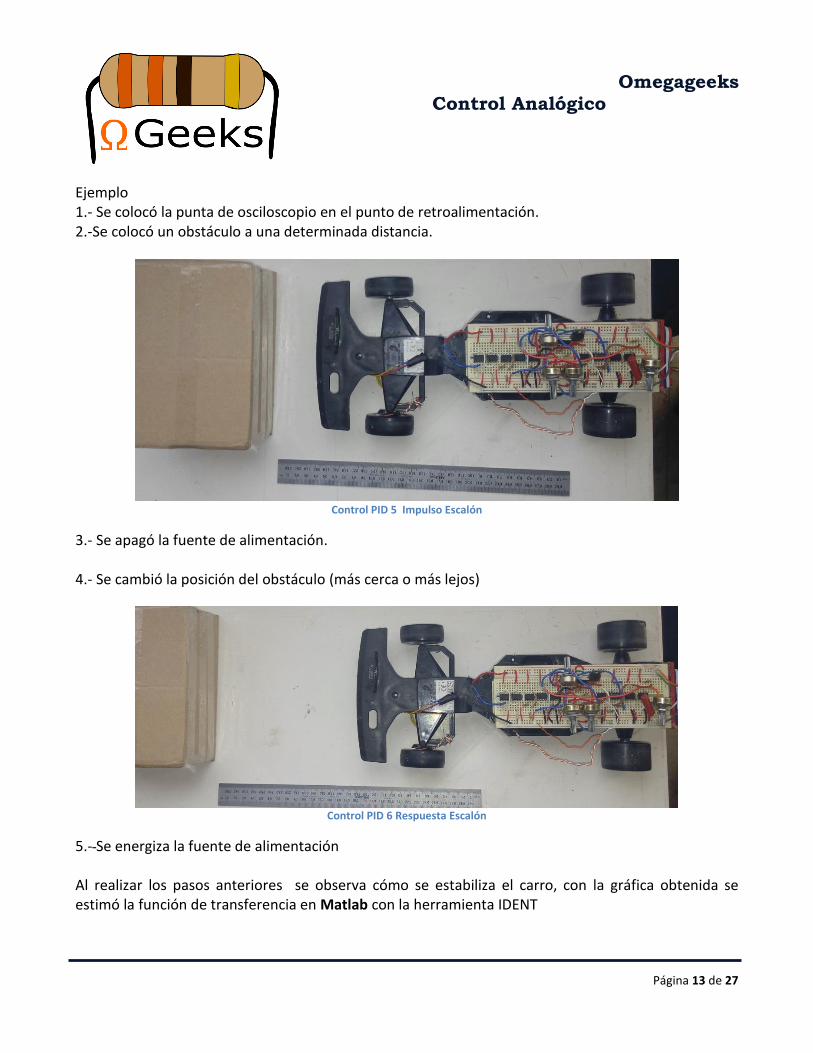
Ejemplo 1.- Se colocó la punta de osciloscopio en el punto de retroalimentación. 2.-Se colocó un obstáculo a una determinada distancia.
Control PID 5 Impulso Escalón
3.- Se apagó la fuente de alimentación. 4.- Se cambió la posición del obstáculo (más cerca o más lejos)
Control PID 6 Respuesta Escalón
5.- Se energiza la fuente de alimentación Al realizar los pasos anteriores se observa cómo se estabiliza el carro, con la gráfica obtenida se estimó la función de transferencia en Matlab con la herramienta IDENT
Omegageeks
Control Analógico
Página 14 de 27
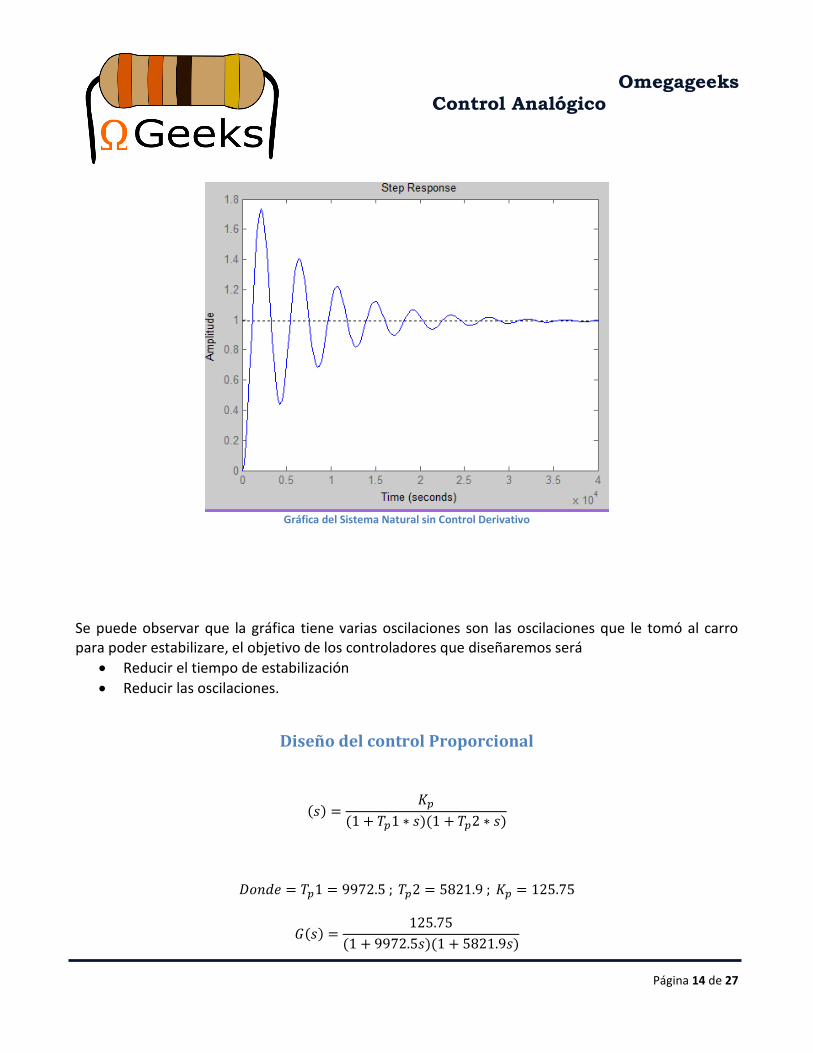
Gráfica del Sistema Natural sin Control Derivativo
Se puede observar que la gráfica tiene varias oscilaciones son las oscilaciones que le tomó al carro para poder estabilizare, el objetivo de los controladores que diseñaremos será
Reducir el tiempo de estabilización
Reducir las oscilaciones.
Diseño del control Proporcional
(𝑠) =𝐾𝑝
(1 + 𝑇𝑝1 ∗ 𝑠)(1 + 𝑇𝑝2 ∗ 𝑠)
𝐷𝑜𝑛𝑑𝑒 = 𝑇𝑝1 = 9972.5 ; 𝑇𝑝2 = 5821.9 ; 𝐾𝑝 = 125.75
𝐺(𝑠) =125.75
(1 + 9972.5𝑠)(1 + 5821.9𝑠)

Omegageeks
Control Analógico
Página 15 de 27
𝐺(𝑠) =125.75
(1 + 15794.4𝑠 + 58.0589𝑥106)
Una vez obtenida la funcion de transferencia, deducimos que el sistema es tipo 0 y orden 2
Antes de empezar a calcular el control proporcional, vamos calcular el error en estado estacionario.
𝑒𝑠𝑠 =1
1 + 𝐾
𝐾 = lim𝑠=0
125.75
(1 + 15794.4𝑠 + 58.0589𝑥106)= 125.75
𝑒𝑠𝑠 =1
1 + 125.75= 0.0078 = 0.78%
𝐶𝑎𝑙𝑐𝑢𝑙𝑎𝑟𝑒𝑚𝑜𝑠 𝑢𝑛 𝑐𝑜𝑛𝑡𝑟𝑜𝑙 𝑝𝑟𝑜𝑝𝑜𝑟𝑐𝑖𝑜𝑛𝑎𝑙 𝑝𝑎𝑟𝑎 𝑟𝑒𝑑𝑢𝑐𝑖𝑟 𝑒𝑙 𝑒𝑟𝑟𝑜𝑟 𝑒𝑛 𝑒𝑠𝑡𝑑𝑜 𝑒𝑠𝑡𝑎𝑐𝑜𝑛𝑎𝑟𝑖𝑜 𝑑𝑒𝑙 10%
𝐾𝑝 =1
𝑒𝑠𝑠− 1 = 9
9 = lim𝑠=0
125.75 𝐾
(1 + 1594.4𝑠 + 58.0589𝑥106)
𝐾𝑝 = 9
125.75= 0.07157
Concluimos que la ganancia del control proporcional es baja, y para nuestro sistema que es un carro
controlador con un PID, es más que suficiente, ya que nuestra respuesta es demasiado rápida, y para
ciertos sistemas que tienen impulsos rápidos, la ganancia del controlador si es menor a 1, ayuda al
sistema a responder más lento, y viceversa a esa hipótesis.
Omegageeks
Control Analógico
Página 16 de 27
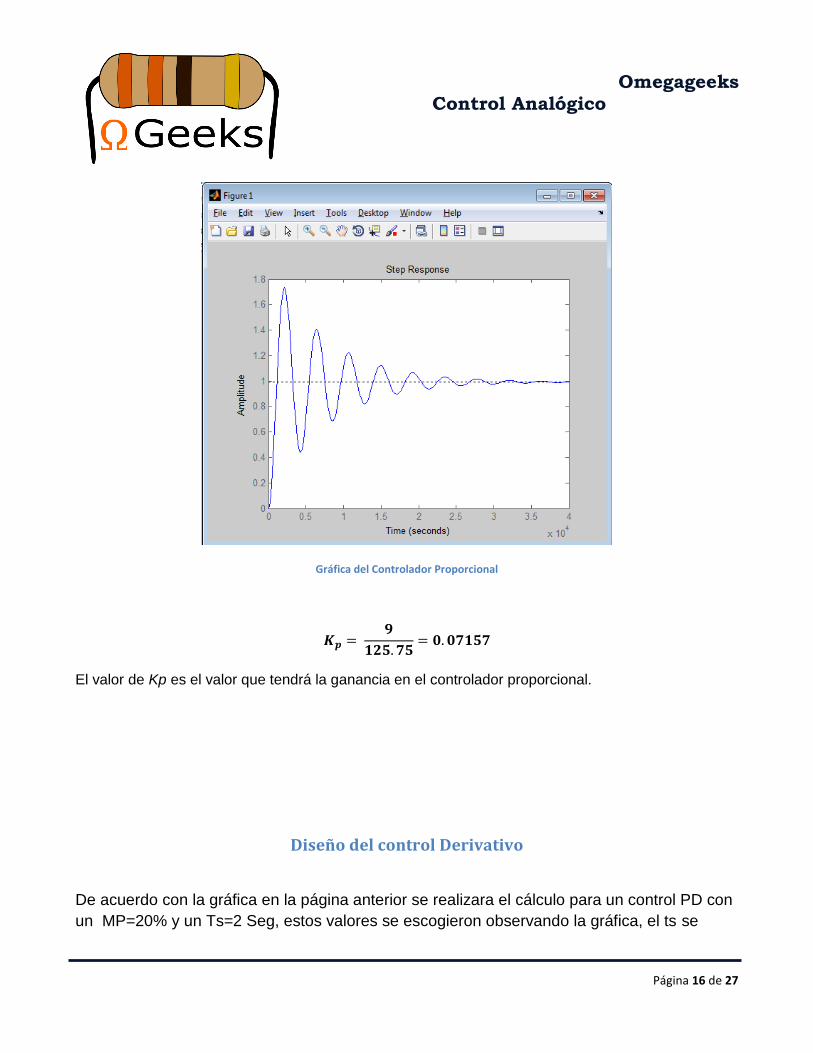
Gráfica del Controlador Proporcional
𝑲𝒑 = 𝟗
𝟏𝟐𝟓. 𝟕𝟓= 𝟎. 𝟎𝟕𝟏𝟓𝟕
El valor de Kp es el valor que tendrá la ganancia en el controlador proporcional.
Diseño del control Derivativo
De acuerdo con la gráfica en la página anterior se realizara el cálculo para un control PD con
un MP=20% y un Ts=2 Seg, estos valores se escogieron observando la gráfica, el ts se
Omegageeks
Control Analógico
Página 17 de 27
escogió para hacer que se estabilice en menos tiempo mientras que el Mp para reducir las
oscilaciones hasta un 20%
G(s)=125.8
5.805𝑥107+1.579𝑥104+1=
125.8
(1+9972.5+1)(1+5821.9)
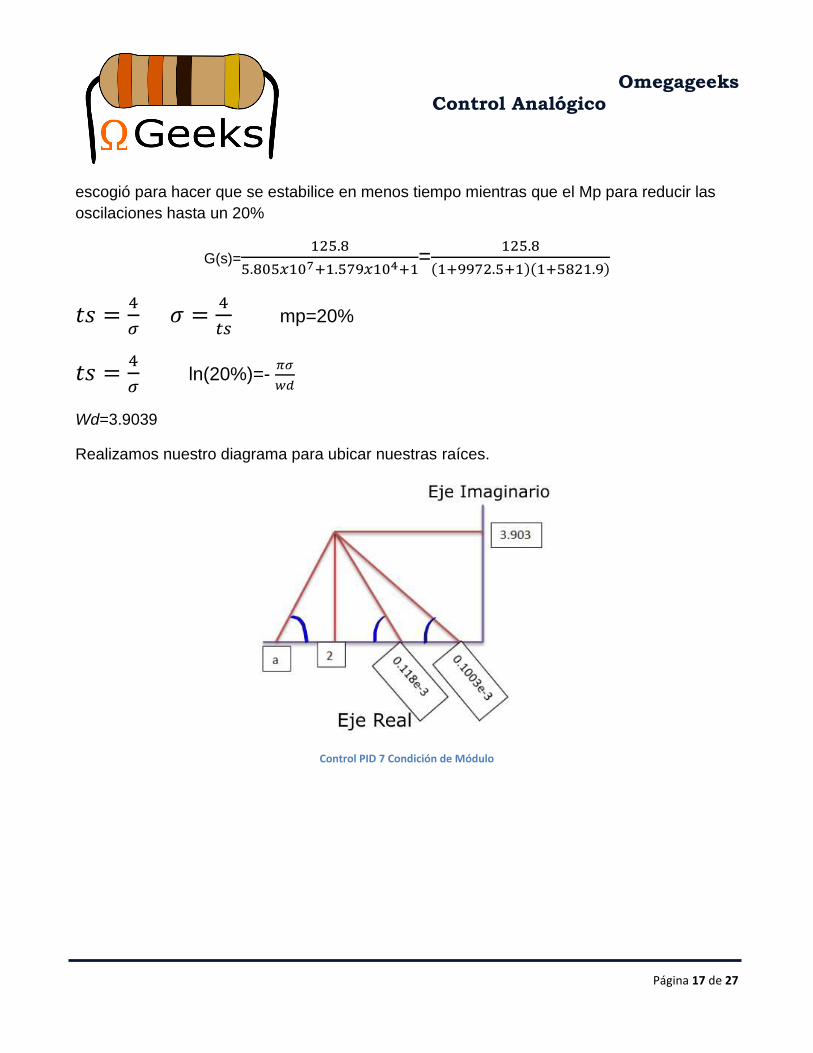
𝑡𝑠 =4
𝜎 𝜎 =
4
𝑡𝑠 mp=20%
𝑡𝑠 =4
𝜎 ln(20%)=-
𝜋𝜎
𝑤𝑑
Wd=3.9039
Realizamos nuestro diagrama para ubicar nuestras raíces.
Control PID 7 Condición de Módulo
Omegageeks
Control Analógico
Página 18 de 27
Aplicamos la condición de ángulo.
Ө1=180-arctg(3.9090
2−0.118𝑥10−3)=117.12443
Ө2=180-arctg(3.9090
2−0.118𝑥10−3)=117.12526
Ө3=arctg(3.9090
𝑎−2)=414.2496
a=4.81
∑ Ө2 + Ө1 + 180 = Өa
Aplicamos la condición de Modulo
𝑘𝑑(125.8) ∗√3.90392+(4.81007−2)2
√3.90392+(2−0.1178𝑥10−3)2∗√3.90392+(2−0.1178𝑥10−3)2=1
Kd=0.031795 Ganancia de nuestro controlador derivativo
Gc(s)=kd(s+a)
Gc(s)G(s)=125.8(0.0317956+0.1579)
5.0805𝑥107+1.59𝑥104+1=
3.9988+19.239
5.0805𝑥107+1.59𝑥104+1
3.999 𝑠 + 19.24
5.805𝑒07 𝑠^2 + 1.58𝑒04 𝑠 + 20.24
Omegageeks
Control Analógico
Página 19 de 27
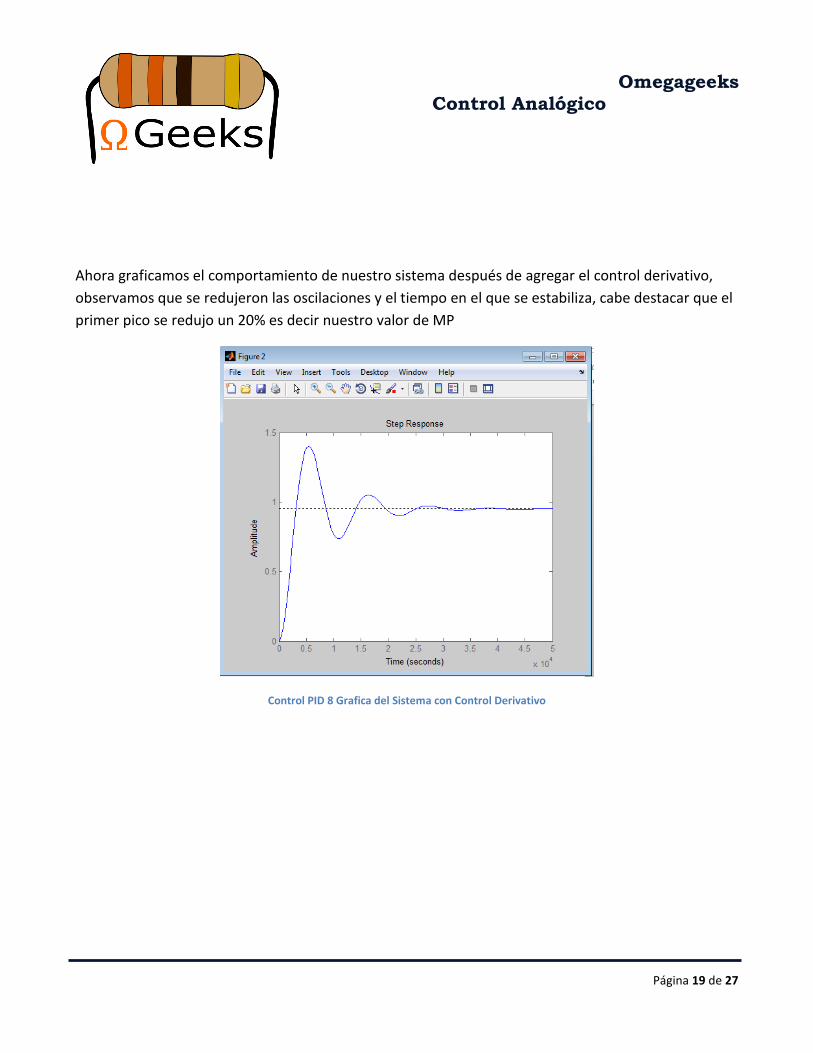
Ahora graficamos el comportamiento de nuestro sistema después de agregar el control derivativo,
observamos que se redujeron las oscilaciones y el tiempo en el que se estabiliza, cabe destacar que el
primer pico se redujo un 20% es decir nuestro valor de MP
Control PID 8 Grafica del Sistema con Control Derivativo
Omegageeks
Control Analógico
Página 20 de 27
Diseño control Integral
Conociendo el valor de a en el control derivativo podemos empezar a calcular los valores de la resistencia y
capacitor.
𝑇𝑖 =1
𝑏
𝑇𝑖 =1
0.1= 10
El valor de Kp es el calculado en el control integral
𝐾𝑖 =𝐾𝑝
𝑇𝑖
𝐾𝑖 =0.078
10
𝐾𝑖 = 7.8𝑥10−3
Conociendo el valor de Ki ahora ya podemos calcular el valor de la resistencia y capacitor del control integral.
𝐾𝑖 =1
𝑅𝑥𝐶
Se supone un valor de capacitancia comercial de 2000nf, es decir bastaría con poner en paralelo nos
capacitores de 1000nf
𝐾𝑖 =1
𝑅𝑥1000𝑛𝑓
7.8𝑥10−3 =1
𝑅𝑥2000𝑛𝑓
𝑅 =1
𝑐 𝑘𝑖
Omegageeks
Control Analógico
Página 21 de 27
𝑅 =1
2000𝑛𝑓𝑥7.8𝑥10−3
𝑅 = 64.10Ω
𝑎 =1
𝑇𝑑
𝑎 = 4.8105
𝑇𝑑 = 𝑅𝑥𝐶
4.8105 =1
𝑇𝑑
𝑇𝑑 =1
4.8105= 0.2078785
Obteniendo el valor de Td podemos empezar a calcular el valor de la resistencia y del capacitor.
0.2078785 = 𝐶𝑥𝑅
Se supone un valor de capacitor comercial de 100nf
𝑅 =0.2078785
1000𝑛𝑓= 207.8𝑘Ω
3.999 s + 19.24
--------------------------------
5.805e07 s^2 + 1.58e04 s + 20.24
Omegageeks
Control Analógico
Página 22 de 27
Circuito.
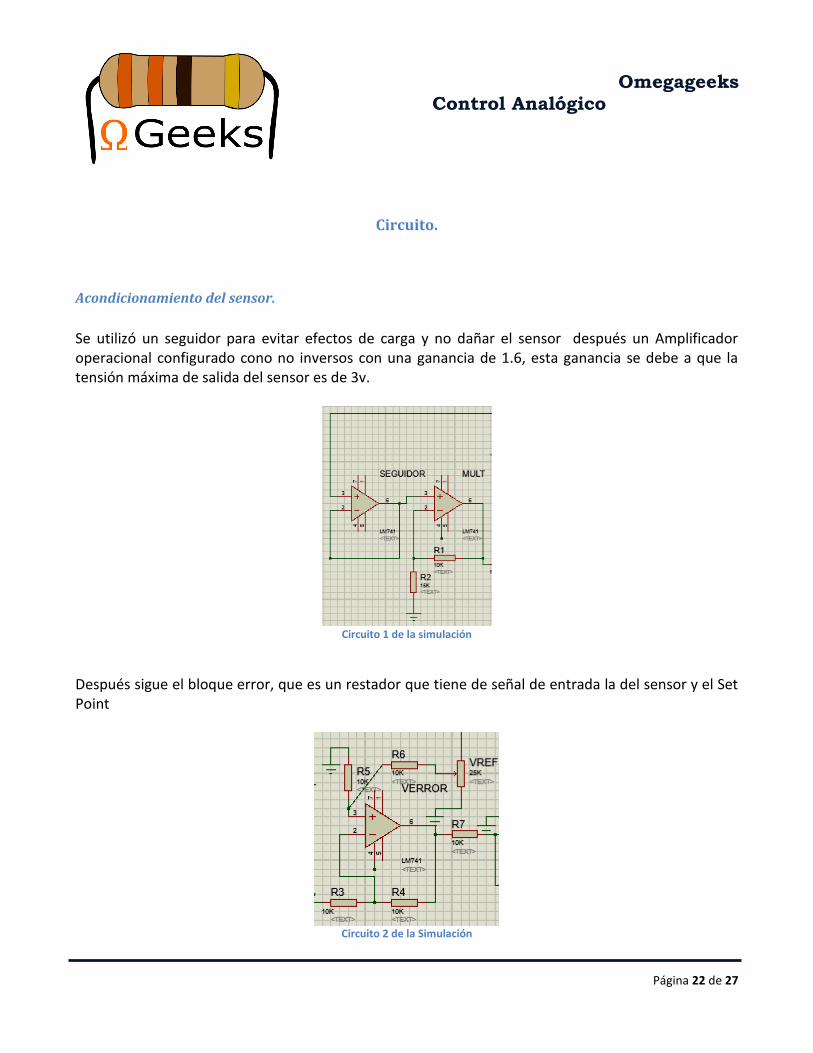
Acondicionamiento del sensor.
Se utilizó un seguidor para evitar efectos de carga y no dañar el sensor después un Amplificador operacional configurado cono no inversos con una ganancia de 1.6, esta ganancia se debe a que la tensión máxima de salida del sensor es de 3v.
Circuito 1 de la simulación
Después sigue el bloque error, que es un restador que tiene de señal de entrada la del sensor y el Set Point
Circuito 2 de la Simulación
Omegageeks
Control Analógico
Página 23 de 27
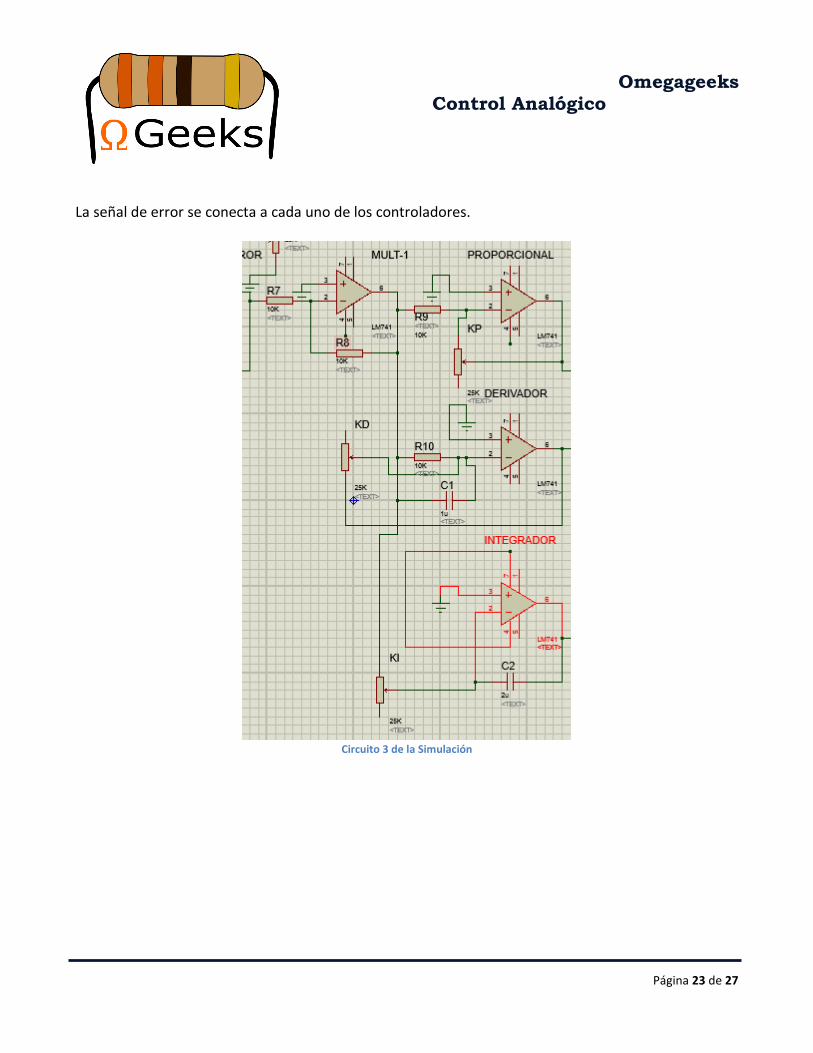
La señal de error se conecta a cada uno de los controladores.
Circuito 3 de la Simulación
Omegageeks
Control Analógico
Página 24 de 27
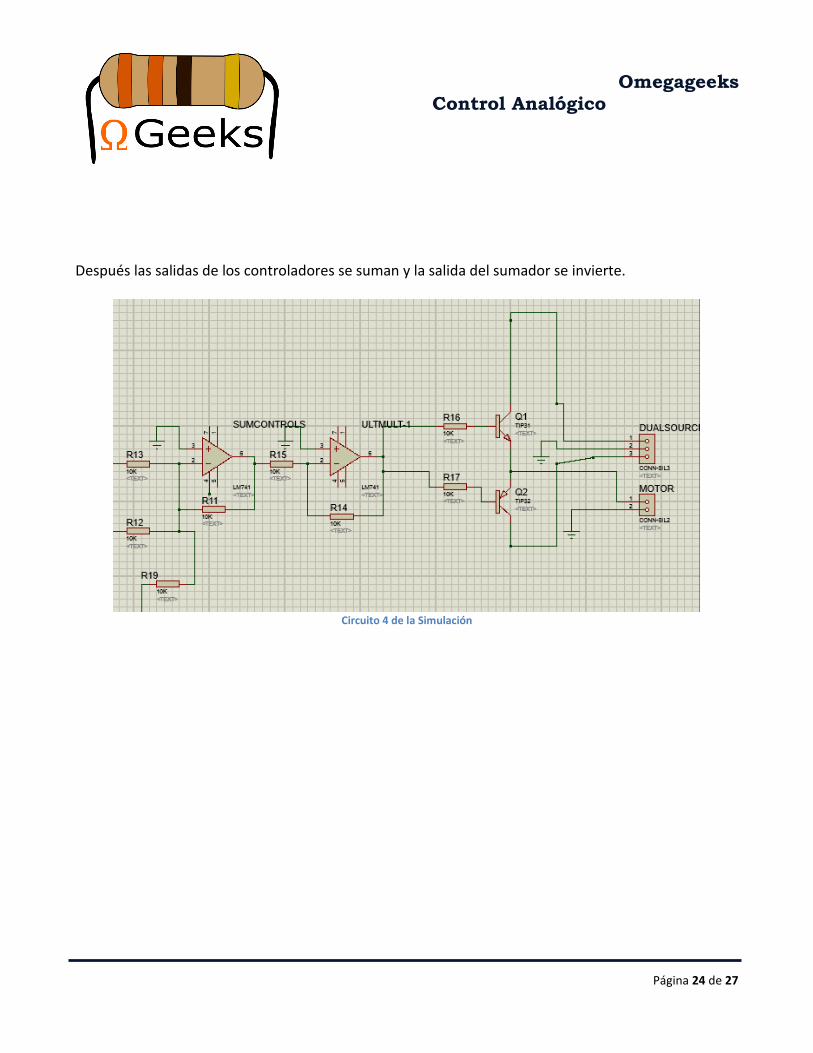
Después las salidas de los controladores se suman y la salida del sumador se invierte.
Circuito 4 de la Simulación
Omegageeks
Control Analógico
Página 25 de 27
Conclusiones. Se diseñó un control PID en un vehículo para evitar impactos y mantener una distancia ajustable
con respecto del frente del vehículo. De acuerdo a las características de la función de transferencia
se notó que era un sistema que a una impulso escalón dado por una distancia de 15 cm daba un
alrededor de siete oscilaciones, con el diseño del control derivativo se redujeron tanto en amplitud
como en el número de sobre impulsos. El diseño se llevó para una reducción del 20% observando el
comportamiento del sistema se observó que es consistente respecto a los criterios de diseño.
Con los resultados obtenidos en esta práctica se concluye lo siguiente: - Se reafirmaron los conocimientos del uso de amplificadores para realizar controladores. - El entender el funcionamiento de la teoría y de la aplicación del control analógico - El dispositivo funciona mejor con un control PD que con un PID debido a la naturaleza dinámica
del sistema.
Bibliografía
*Areny, R. P. (2000). Sensores y Acondicionadores de Señal. Colombia: marcombo. [2]
*Robert F. Coughlin, F. F. (2004). Amplificadores operacionales y circuitos integrados lineales. (Quinta edición.
ed.). Pearson, Prentice Hall.[1]
Omegageeks
Control Analógico
Página 26 de 27
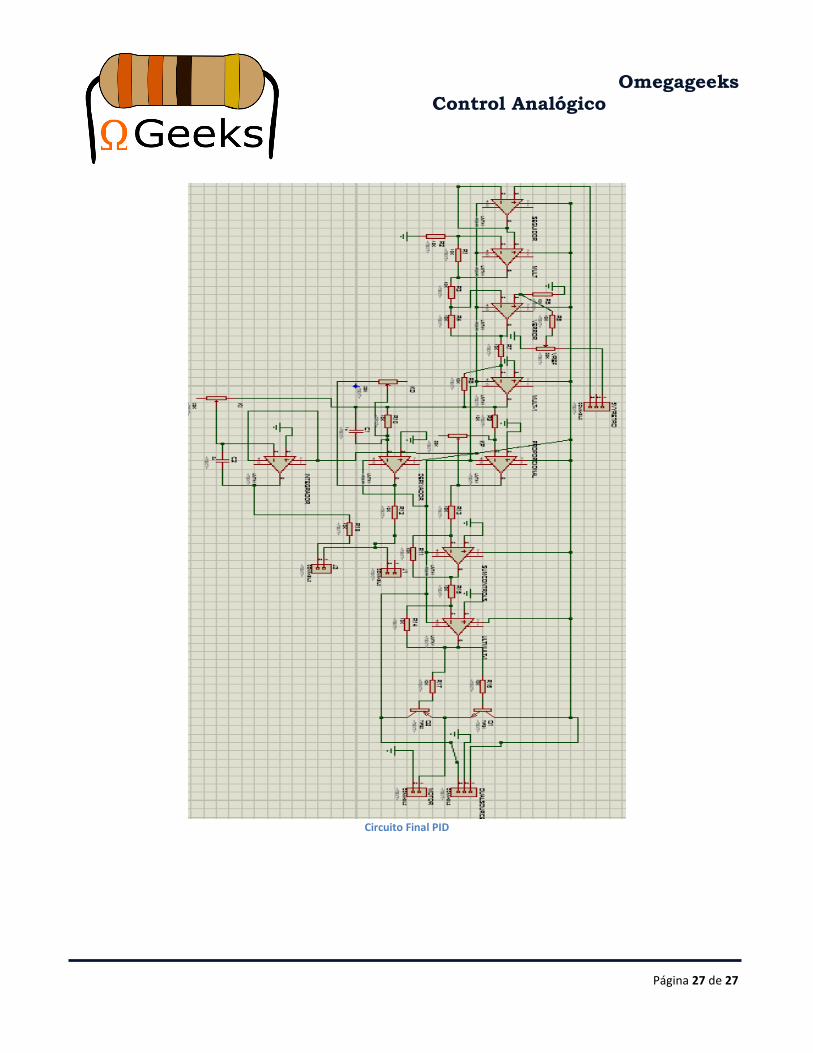
Anexo Circuito Final
Omegageeks
Control Analógico
Página 27 de 27
Circuito Final PID