Embed Size (px)
Citation preview

L'accordparfait
Page 1
21e Olympiades de PhysiqueEpreuves Nationales7 et 8 février 2014
CORTET AurianeMAISONNIER ClementineEL MOUTAOUAKKIL Amal
CHARRION AdrienElèves de terminale S
Lycée Rosa ParksNeuville/Saône


Table des matièresRemerciements...................................................................................................................................................21Résumé du projet..............................................................................................................................................32Descriptif de la guitare utilisée dans ce projet..................................................................................................33Rappels succincts sur les modes de vibration d'une corde aux extrémités fixes.............................................4
3.1Les ondes stationnaires ...........................................................................................................................43.2Conséquences sur la vibration de la corde...............................................................................................4
4Les notes émises par les cordes d'une guitare.................................................................................................55La sensibilité fréquentielle de l'oreille humaine- notion de Savart ...................................................................56Généralités sur l'accord d'une corde de guitare................................................................................................5
6.1Principe.....................................................................................................................................................56.2Valeur des tensions des cordes de guitare...............................................................................................6
7Mesures.............................................................................................................................................................67.1Mesures de l'allongement des cordes de nylon en fonction de la tension...............................................67.2Variation de la fréquence propre pour un tour de clef...............................................................................77.3Signal obtenu au niveau du micro. Amortissement des cordes ...............................................................87.4Le signal observé lors de l'excitation de la corde.....................................................................................97.5Evolution du spectre au cours de amortissement de la vibration.............................................................97.6Influence de la façon d'exciter la corde sur le timbre obtenu(v annexe 13 - 6)......................................10
a)Influence de la position des doigts du musicien..................................................................................10b)Influence du doigté du musicien..........................................................................................................10c)Conclusion...........................................................................................................................................10
8Chaîne de régulation de l'accordeur de guitare..............................................................................................108.1Synoptique..............................................................................................................................................108.2Le micro...................................................................................................................................................118.3Le comparateur à deux seuils inverseur................................................................................................118.4La conversion fréquence - tension..........................................................................................................128.5Moteur pas à pas....................................................................................................................................13
a)Pourquoi un moteur pas à pas ?.........................................................................................................13b)Le couple du moteur pas à pas..........................................................................................................13
8.6La carte micro-contrôleur Arduino Uno...................................................................................................148.7La conversion analogique numérique.....................................................................................................148.8Principe du programme chargé dans l'Arduino : ....................................................................................14
9Réalisation pratique ........................................................................................................................................159.1 Réalisation de la pièce de couplage avec les clefs...............................................................................159.2L'alimentation en énergie........................................................................................................................169.3Réalisation des circuits électroniques.....................................................................................................169.4La sélection de la corde à accorder........................................................................................................169.5L'accordeur achevé ................................................................................................................................16
10Essais- Mise au point....................................................................................................................................1711Résultats........................................................................................................................................................17
Méthode d'accord standard .........................................................................................................................1712Conclusion.....................................................................................................................................................1813Annexes.........................................................................................................................................................19
13.1Analyse de Fourier du son émis par la corde 5 depuis l'attaque jusqu'à sa disparition.......................1913.2Courbes donnant la force appliquée en fonction de l’allongement des cordes....................................2113.3Calcul de la variation de fréquence résultant d'une petite variation de tension...................................2213.4Schémas des circuits électronique.......................................................................................................2213.5Carte Arduino Uno.................................................................................................................................2213.6Spectres du son émis par la corde 5 excitée de différentes façons.....................................................2313.7Programme Arduino..............................................................................................................................2413.8Caractéristiques du moteur pas à pas..................................................................................................2513.9Le circuit LM 350...................................................................................................................................2613.10Le câblage du circuit électronique......................................................................................................2613.11Buget...................................................................................................................................................27

Remerci e ments Nous remercions Mme Jacques notre professeure de sciences de l'ingénieur et M Jouve notre professeur de physique pour l'aide qu'ils nous ont apporté pour la réalisation de ce projet. Nous remercions Madame Dugourgeot, proviseure du Lycée Rosa Parks, pour la salle qu'elle met à la disposition de l'atelier scientifique, ce qui a facilité la mise au point de notre appareil.
Nous remercions aussi le comité des Olympiades de Physique pour le financement accordé sans lequel nous n'aurions pas pu mener à son terme ce projet.
Page 2

1 Résumé du projet Nous avons construit un accordeur automatique de guitare sèche classique ou acoustique. Il estcapable de tourner les clefs et d'ajuster la tension des cordes afin d'obtenir les notes correctes. Pourcela un moteur pas à pas, piloté par une carte Arduino Uno, est relié aux clefs de l'instrument par lemusicien. Un dispositif électronique transforme le son émis par une corde en une tension continueproportionnelle à la fréquence. Cette tension est lue par la carte Arduino dans laquelle nous avonstéléversé un programme informatique. Ce programme compare la tension avec une tension deconsigne qui dépend de chaque corde et que nous avons préalablement déterminée. La carte faittourner la clef pour obtenir un accord correct soit dans le sens horaire si la fréquence est trop basse,soit dans le sens antihoraire si la fréquence est trop élevée.
Nous avons dû étudier en détail la vibration d'une corde de guitare, depuis son excitation jusqu'à lafin de son amortissement afin de régler cet accordeur. Finalement il fixe la fréquence de vibration à ±0,5 Hz près.
Nous sommes conscients qu'un musicien averti accordera sûrement mieux sa guitare que notredispositif, mais notre système peut être utile pour un musicien débutant éloigné de son professeur etincapable d'accorder seul sa guitare. .
2 Descriptif d e la guitare utilisée dans ce projet Nous avons utilisé une guitare sèche munie de cordes en nylon.
C'est une guitare en tout point identique à celle de la figure ci-dessous.
Page 3

3 Rappels succincts sur les modes de vibration d'une corde aux extrémités fixes
3.1 Les ondes stationnaires
Lorsqu'on excite avec un vibreur un corde tendue avec ses deux extrémités fixes on constate l'apparition d'ondes stationnaires pour certaines fréquences bien déterminées. L'aspect de la corde est alors particulier et on observe des fuseaux et des nœuds fixes dans l'espace.
Pour la plus petite fréquence f1 la corde présente un seul fuseau, le milieude la corde est animé d'une vibration ayant une amplitude bien plus grandeque celle du vibreur excitateur.
Ce mode de vibration est le mode fondamental.
Pour une fréquence double de f1 on observe deux fuseaux avec un nœudde vibration au milieu, pour la fréquence triple on observe trois fuseaux .etc .
Le phénomène a lieu si la longeur de la corde est un mulitple entier de lademi- longueur d'onde de l'onde qui se propage sur la corde.
3.2 Conséquences sur la vibration de la corde
Lorsqu'on excite une corde de guitare, tous les modes de vibration peuvent avoir lieu en même temps, ce qui a pour conséquence l'obtention d'un signal complexe.
Nous avons enregistré le signal émis par les cordes et réalisé une analyse spectrale de Fourier avec le logiciel Latis Pro.
Nous obtenons par exemple le résultat suivant pour la corde n°2.
Ce qui donne l'analyse de Fourier suivante .
Nous constatons que la fréquence fondamentale qui définit la note jouée a une amplitude à peu prèségale à celle de l'harmonique 2, ce qui donne un signal présentant des extremums secondairesmarqués qui vont rendre délicate la mise au point de l'accordeur.
Page 4
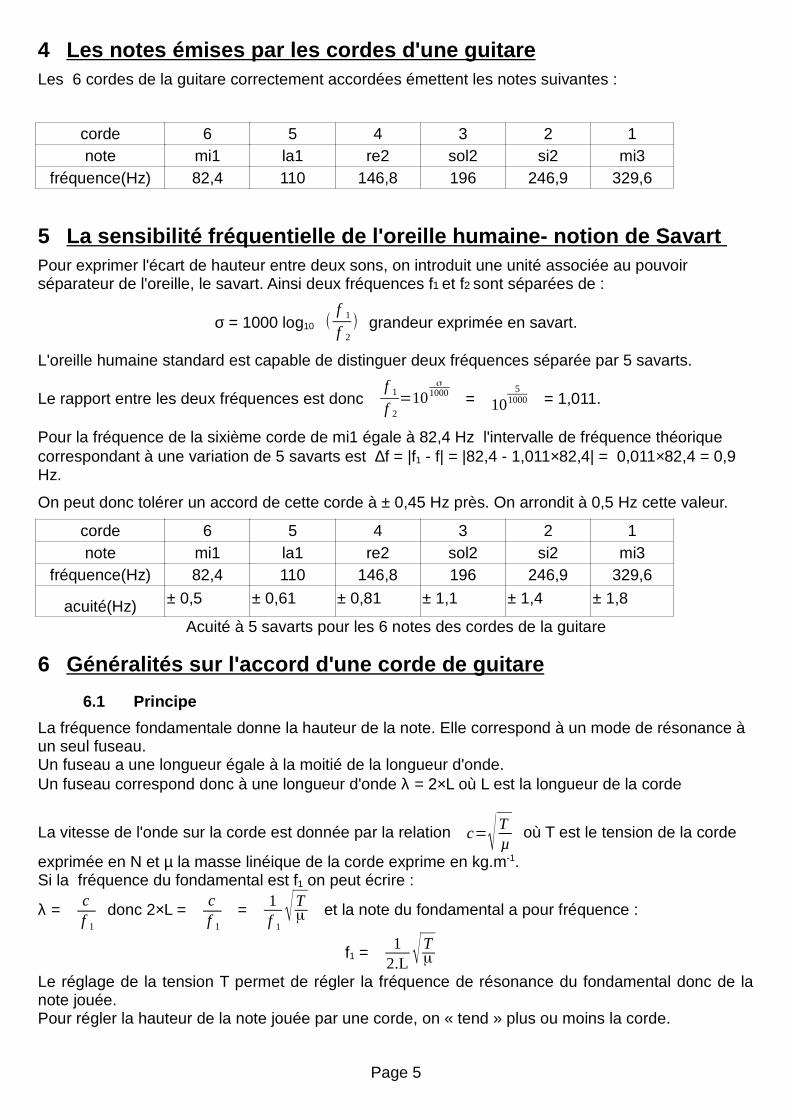
4 Les notes émises par les cordes d'une guitare Les 6 cordes de la guitare correctement accordées émettent les notes suivantes :
corde 6 5 4 3 2 1note mi1 la1 re2 sol2 si2 mi3
fréquence(Hz) 82,4 110 146,8 196 246,9 329,6
5 La sensibilité fréquentielle de l'oreille humaine- notion de Savart Pour exprimer l'écart de hauteur entre deux sons, on introduit une unité associée au pouvoir séparateur de l'oreille, le savart. Ainsi deux fréquences f1 et f2 sont séparées de :
σ = 1000 log10 (f 1
f 2
) grandeur exprimée en savart.
L'oreille humaine standard est capable de distinguer deux fréquences séparée par 5 savarts.
Le rapport entre les deux fréquences est donc f 1
f 2
=10σ
1000 = 105
1000 = 1,011.
Pour la fréquence de la sixième corde de mi1 égale à 82,4 Hz l'intervalle de fréquence théorique correspondant à une variation de 5 savarts est ∆f = |f1 - f| = |82,4 - 1,011×82,4| = 0,011×82,4 = 0,9 Hz.
On peut donc tolérer un accord de cette corde à ± 0,45 Hz près. On arrondit à 0,5 Hz cette valeur.
corde 6 5 4 3 2 1note mi1 la1 re2 sol2 si2 mi3
fréquence(Hz) 82,4 110 146,8 196 246,9 329,6
acuité(Hz) ± 0,5 ± 0,61 ± 0,81 ± 1,1 ± 1,4 ± 1,8
Acuité à 5 savarts pour les 6 notes des cordes de la guitare
6 Généralités sur l'accord d'une corde de guitare
6.1 Principe
La fréquence fondamentale donne la hauteur de la note. Elle correspond à un mode de résonance à un seul fuseau.Un fuseau a une longueur égale à la moitié de la longueur d'onde.Un fuseau correspond donc à une longueur d'onde λ = 2×L où L est la longueur de la corde
La vitesse de l'onde sur la corde est donnée par la relation c=√Tµ
où T est le tension de la corde
exprimée en N et µ la masse linéique de la corde exprime en kg.m-1.Si la fréquence du fondamental est f1 on peut écrire :
λ = cf 1
donc 2×L = cf 1
= 1f 1
√Tµ et la note du fondamental a pour fréquence :
f1 = 12.L √T
µ
Le réglage de la tension T permet de régler la fréquence de résonance du fondamental donc de lanote jouée.Pour régler la hauteur de la note jouée par une corde, on « tend » plus ou moins la corde.
Page 5
Pour cela, on tourne la clef ce qui a pour effet d'appliquer une force d'intensité plus ou moins grandesur la corde.
On modifie donc la célérité de l'onde mécanique sur la corde.
La longueur utile de la corde ne change pas car la distance entre le sillet de tête et le chevalet ne change pas et reste égale à 63 cm.Il se peut que cette longueur soit très légèrement modifiée puisque la corde fixée sur la table d'harmonie via le chevalet peut déformer légèrement le manche.
Le fait de tirer sur la corde avec une tension réglable modifie aussi la longueur totale de la corde et par conséquent, également sa masse linéique.
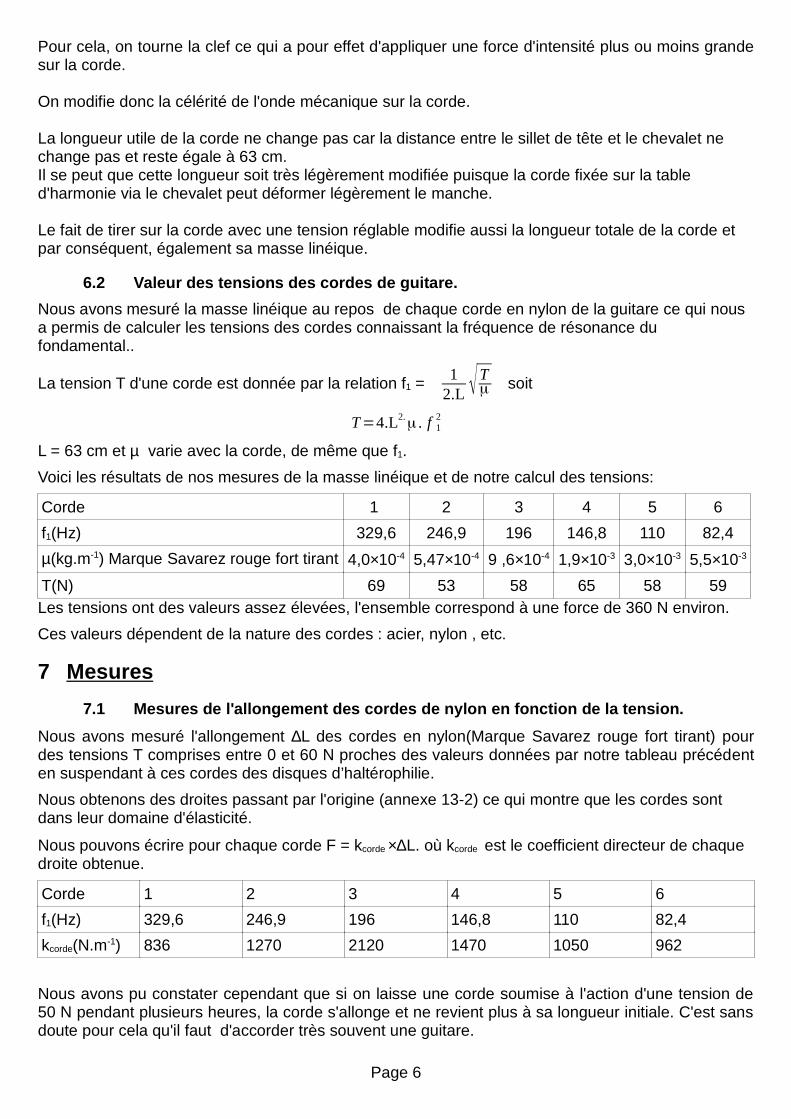
6.2 Valeur des tensions des cordes de guitare.
Nous avons mesuré la masse linéique au repos de chaque corde en nylon de la guitare ce qui nous a permis de calculer les tensions des cordes connaissant la fréquence de résonance du fondamental..
La tension T d'une corde est donnée par la relation f1 = 12.L √T
µ soit
T=4.L2.µ . f 12
L = 63 cm et µ varie avec la corde, de même que f1.
Voici les résultats de nos mesures de la masse linéique et de notre calcul des tensions:
Corde 1 2 3 4 5 6
f1(Hz) 329,6 246,9 196 146,8 110 82,4
µ(kg.m-1) Marque Savarez rouge fort tirant 4,0×10-4 5,47×10-4 9 ,6×10-4 1,9×10-3 3,0×10-3 5,5×10-3
T(N) 69 53 58 65 58 59Les tensions ont des valeurs assez élevées, l'ensemble correspond à une force de 360 N environ.
Ces valeurs dépendent de la nature des cordes : acier, nylon , etc.
7 Mesures
7.1 Mesures de l'allongement des cordes de nylon en fonction de la tension.
Nous avons mesuré l'allongement ∆L des cordes en nylon(Marque Savarez rouge fort tirant) pourdes tensions T comprises entre 0 et 60 N proches des valeurs données par notre tableau précédenten suspendant à ces cordes des disques d’haltérophilie.
Nous obtenons des droites passant par l'origine (annexe 13-2) ce qui montre que les cordes sont dans leur domaine d'élasticité.
Nous pouvons écrire pour chaque corde F = kcorde ×∆L. où kcorde est le coefficient directeur de chaque droite obtenue.
Corde 1 2 3 4 5 6
f1(Hz) 329,6 246,9 196 146,8 110 82,4
kcorde(N.m-1) 836 1270 2120 1470 1050 962
Nous avons pu constater cependant que si on laisse une corde soumise à l'action d'une tension de50 N pendant plusieurs heures, la corde s'allonge et ne revient plus à sa longueur initiale. C'est sansdoute pour cela qu'il faut d'accorder très souvent une guitare.
Page 6

7.2 Variation de la fréquence propre pour un tour de clef
Pour la mise au point de notre appareil il est important d'avoir un ordre de grandeur de la variation defréquence de la fréquence f1 lorsqu'on fait tourner la clef d'un tour.
Étude expérimentale
Nous enregistrons le signal correspondant au son émis par une des cordes de la guitare accordée correctement, puis nous tournons d'un tour la clef en détendant la corde ou en la tendant plus.
Voici les résultats :
Corde 1 2 3 4 5 6
f1(Hz) 329,6 246,9 196 146,8 110 82,4
T(N) 50,1 56,4 62,1 68,4 43,9 40
∆f1(Hz) pour 1 tour sens horaire
+ 32 +30 +26 10 +6 +6
∆f1(Hz) pour 1 tour sens anti horaire
-30 -17 -34 -15 -5 -10
Nous constatons que la variation de fréquence augmente avec la fréquence de résonance de la corde.
Elle est du même ordre de grandeur si on tend ou détend la corde.
Page 7

7.3 Signal obtenu au niveau du micro. Amortissement des cordes
Nous avons enregistré le signal obtenu à la sortie de notre micro et observé l'amortissement de chaque corde depuis l'excitation. l'enregistrement est effectué à l'aide du logiciel Latis Pro et l'interface Sysam. la durée de l'acquisition est de 5 s et le nombre de points d’échantillonnage est de 20 000.
corde 1
corde 2
Corde 3
corde 4
Corde 5
corde 6
L’amortissement rapide du signal (moins de 5 s)rend la mise au point de l'accordeur délicate.
Les signaux sont saturés entre 0 et 500 ms car nous avons placé le micro dans la caisse de résonance afin de mieux évaluer la durée de l'extinction du son. Ceci provient de la forte amplification du micro.
La corde 6 de mi1 plus lourde s’amortit beaucoup plus lentement que la corde 1 de mi3 plus légère.
Cela aura un effet important pour le réglage de l'accordeur.
Page 8

7.4 Le signal observé lors de l'excitation de la cor de
Lors de la mise au point de notre appareil, nous avons rencontré des difficultés lorsque nous tenions compte de l'attaque. Pour essayer de comprendre l'origine de ces difficultés, nous avons enregistré le signal lorsque le musicien excite la corde en la grattant.
Par exemple pour la corde 5(110 Hz) nous obtenons l'enregistrement suivant, il concerne les 400 premières millisecondes.
.
Spectre de Fourier du son obtenu lors de l'attaque. La zone bleue indique l'intervalle de temps surlequel est calculé le spectre de Fourier.
Lors de l'attaque, le spectre est confus et il faudra donc que l'accordeur n'en tienne pas compte comme nous l'avons constaté intuitivement.
7.5 Evolution du spectre au cours de amortissement d e la vibration
Nous constatons que, lors de l'excitation de la corde, l'amplitude du signal augmente et possède de nombreux harmoniques , ensuite, la fréquence correcte est jouée , mais se superposent des harmoniques et plus particulièrement l'harmonique 2, comme nous le montre l'analyse spectrale effectuée sur différents intervalles de temps lors de l'enregistrement :( v annexe 13-1)
Il apparaît que les harmoniques de rang 2 et 3 s'atténuent assez rapidement. L'harmonique 2, d'amplitude plus importante que le fondamental pour des instants compris entre 0 et 300 ms s'amortitet son amplitude devient inférieure à celle du fondamental pour des instant supérieurs. Le son émis par la guitare s'appauvrit en harmoniques au cours du temps lors de son amortissement. Au bout
Page 9

d'une seconde, pour la corde 5, le son se rapproche d'un son sinusoïdal, seul le fondamental a une amplitude importante dans l'analyse de Fourier. Cet appauvrissement en harmonique du signal au cours de son amortissement peut expliquer que le son d'une guitare est agréable surtout juste après l'excitation de la corde. Par contre cela sera plutôt un avantage pour la mise au point de notre accordeur car la mesure de la fréquence est plus simple.
7.6 Influence de la façon d'exciter la corde sur le timbre obtenu(v annexe 13 - 6)
Nous avons constaté que notre accordeur fonctionne plus ou moins bien selon la manière dont on excite la corde. Aussi avons nous essayé de comprendre pourquoi.
a) Influence de la position des doigts du musicien
Nous avons étudié le spectre du son émis par la corde 5 pendant 500 ms après l'attaque. pour des lieux d'excitation situés à des distances différentes du chevalet.
Les distances choisies sont 5 cm, 10cm, 15 cm et 20 cm.
La distance de 15 cm correspond à un lieu d'excitation situé sur la rosace.
On constate que c'est ce lieu qui donne le spectre le plus riche en harmoniques.
b) Influence du doigté du musicien
Nous avons examiné le spectre du son émi par la corde 5 lorsque le musicien l'excite en un lieu situé sur la rosace mais soit en la pinçant franchement et en la tirant vers le haut soit en la « frottant » transversalement et délicatement.
Nous obtenons deux spectres différents.
c) Conclusion
Nous confirmons avec l'analyse spectrale que le timbre du son est différent selon la manière dont on excite la corde, mais cela n'explique pas vraiment pourquoi l'accordeur est plus efficace pour une corde frottée délicatement. Il est possible que notre dispositif de conversion fréquence -tension ne détecte pas la bonne fréquence pour certaines combinaisons d'harmoniques occasionnant des extremums secondaires très marqués.
8 Chaîne de régulation de l'accordeur de guitare
8.1 Synoptique
Page 10
Micro amplificateur Comparateur à deux seuils
Convertisseur fréquence tension
Carte ArduinoModule de
commande du moteur
Moteur pas à pasConsigne : corde accordée

8.2 Le micro
Le micro est un micro à électret possédant un amplificateur intégré. Il doitêtre alimenté sous 5 V, tension disponible sur la carte Arduino
Il nous permet d'obtenir des tensions d'une amplitude de l’ordre de 2 volts àpartir des sons émis par les différentes cordes lorsque le micro est placédans la caisse de résonance de la guitare.
8.3 Le comparateur à deux seuils inverseur
Le convertisseur fréquence tension fonctionne correctement si le signal quil'attaque est un signal rectangulaire. On doit donc transformer le signal sonore en un signal rectangulaire.
Un comparateur à deux seuils est indispensable à cause de la forme du signal complexe délivrée parune corde de guitare.
Les deux seuils doivent être assez éloignés afin de ne détecter que le maximum ou le minium du signal, non pas les extrêmums secondaires.
Pour un tel comparateur les deux tensions de seuils inverseur sont données par les relations :
VBH=Uref
R2
R1+R2
+Vsat
R1
R1+R2
et VBB=Uref
R2
R1+R2
La tension de référence Uref est de 4 V et les deux résistors de réaction sont constituées par un potentiomètre 10 tours de 25 kΩ. On peut ainsi régler les deux tensions de seuil. La tension Vsat = 6,8V environ pour notre montage alimenté sous 8 V.
Entre le micro et le comparateur, un amplificateur dont le gain est différent selon la corde à accorder permet d'ajuster la tension maximale afin qu'elle soit adapté au seuil haut du comparateur à hystérésis.
Les deux montages sont réalisés à l'aide d'un circuit intégré possédant 4 amplificateurs opérationnelsle LM324.
Il ne nécessite pas d'alimentation symétrique. Nous l'alimentons sous 8V
Voici les signaux obtenus avec la corde 2
.
La courbe bleue est le signal issu du micro(sans amplification), la courbe rouge est le signal issu du comparateur à hystérésis.
Page 11

8.4 La conversion fréquence - tension
Le convertisseur fréquence tension est un montage construit autour du circuit intégré LM331. Le schéma est indiqué ci-dessous :
Nous avons tracé la courbe d'étalonnage de ce convertisseur. Nous obtenons les tensions U suivantes et la droite suivante ;
cordes f(Hz) U(V)mi1 82,4 Hz 82,4 0,601la1 110,0 Hz 110 0,809ré2 146,8 Hz 146,8 1,069sol2 196,0 Hz 196 1,43si2 246,9 Hz 246,9 1,8mi3 329,6 Hz 329,6 2,39
f (Hz)50 100 150 200 250 300
U (V)
0,5
1
1,5
2
Nous obtenons une fonction linéaire d'équation U = af×f où af = 7,28×10-3 V.Hz-1 avec 0,48 % d'écart relatif.
Page 12

8.5 Moteur pas à pas
a) Pourquoi un moteur pas à pas ?
L'accord doit être précis, aussi un moteur pas à pas est adapté à cette utilisation car l'angle derotation du moteur est programmable et donc prévisible ce que ne permet pas un moteur à courantcontinu à balais.
On trouve dans le commerce des moteurs pas à pas à moto-réducteur qui tourne de 0,9° par pas.
Vérifions que cette valeur de l'angle de rotation d'un pas convient à notre accordeur.
Le moteur pas à pas tourne au minimum de θ = 0,9°.
Les mesures de variation de fréquence pour un tour de clef du paragraphe 7.2 permettent de déterminer la variation de fréquence attendue pour une rotation de 0,9° = 2,5×10-3 tour en supposant une variation proportionnelle de la fréquence pour une petite variation de tension de la corde comme le suggère l'étude théorique de l'annexe 13-3
Corde 1 2 3 4 5 6
∆f1(Hz) pour 1 tour de clef horaire + 32 +30 +26 10 +6 +6
∆f1(Hz) pour 0,9 ° horaire 0,08 0,075 0,065 0,025 0,015 0,015
On constate que cette variation est très inférieure à la valeur de l’acuité fréquentielle d'un auditeur moyen. Le pas de 0,9° est donc adapté.
b) Le couple du moteur pas à pas
Nous avons mesuré le couple que l'on doit appliquer sur les clefs pour qu'elles tournent.
Pour cela nous avons réalisé le montage suivant :
Une tige de longueur L = 1 m est fixée en l'une de ses extrémités à la clef et son autre extrémité est fixée à un dynamomètre à ressort.
On mesure la force F qui est nécessaire à la mise en rotation de la clef.
Nous avons trouvé l'ordre de grandeur du couple : C = L×F = 0,5 N.m
Le moteur pas à pas choisi doit pouvoir fournir ce couple. C'est le cas puisque le constructeur annonce un couple maximum 1,6 N.m.(v annexe 13-8)
Page 13
cleftige
dynamomètreF
L

8.6 La carte micro-contrôleur Arduino Uno
Les cartes micro-contrôleur Arduino sont des cartes libres de droit « Open-sources » qui peuvent être réalisées par quiconque. De ce fait, elles sont peu onéreuses
Nous utilisons une carte Arduino Uno sur laquelle on fixe une carte Arduinode commande du moteur ; cette dernière permet de fournir la puissancenécessaire au moteur pas à pas.
La carte Arduino Uno a une capacité mémoire de 34 ko qui permet demémoriser des programmes assez complets. Par exemple, notre programmen'occupe que 4,7 ko.
8.7 La conversion analogique numérique
Le convertisseur analogique numérique(CAN) de la carte Arduino est unconvertisseur 10 bits dont on peut choisir la tension de pleine échelle UPE.
Le pas de ce convertisseur est donc ∆Uconv = UPE
210
Le convertisseur fréquence tension délivre une tension Uf qui varie de 4,7×10-3 V par Hz.
On veut que l'accord soit effectué à 0, 5 Hz près, valeur égale à l'ordre de grandeur de l'accuité fréquentielle de l'oreille humaine. La variation de tension Uf est donc de environ de 4,7 /2 = 2,5 mV
Pour que le CAN soit sensible à cette variation, il faut que son pas soit inférieur à 2,5 mV
Donc ∆Uconv = UPE
210 < 2,5×10-3 donc UPE < 1024×2,5×10-3 = 2,56 V
Nous avons en fait utilisé une tension pleine échelle de 2,8 V que nous règlons sur la carte Arduino.
8.8 Principe du programme chargé dans l'Arduino :
(v annexe 13-7)
Le programme, une fois téléversé dans la carte, tourne en boucle tant que la carte est sous tension.
Cette boucle contient les étapes qui suivent.
On lit sur l'entrée analogique A2 la tension délivrée par le convertisseur fréquence tension .
Si cette tension est suffisamment élevée, ce qui indique que ce n'est pas un bruit fortuit, le processus d'accordage est lancé 100 ms après l'attaque afin d'éliminer celle ci.
La carte convertit cette valeur en une valeur binaire codée sur 10 bits que l'on appelle Ucorde, comprise entre 0 et 1024 pour une pleine échelle de 2,8 V
Le programme lit sur l'entrée analogique A3 une tension qui indique quelle corde est accordée tout en calculant la valeur moyenne de Ucorde sur 300 valeurs. La rapidité de la carte le permet et cela ne ralentit pas le processus d'accordage.
Un tableau codé en valeur binaire indique quelle valeur de Ucorde correspond à un accord correct pour la corde choisie, c'est la tension de consigne Uconsigne.
Si Ucorde < Uconsigne,, la fréquence est trop basse, alors le moteur doit tourner dans le sens horaire et tendre de plus en plus la corde.
Si Ucorde>Uconsigne , la fréquence est trop élevée, alors le moteur doit tourner dans le sens antihoraire et détendre la corde.
Des pauses de quelques centaines de millisecondes sont prévues pour éviter que les bruits
Page 14

indésirables ne soient pas pris en compte.
De plus pour les cordes 1,2,3,4 l'accordage ne démarre que si la fréquence est suffisement élevée.
En outre on utilise éventuellement le port série USB pour lire les valeurs de Ucorde,, de la consigne, du numéro de la corde accordée afin de contrôler le bon fonctionnement du processus. C'est ce qui nous a permis de constater la nécessité du calcul de la valeur moyenne de Ucorde.
9 Réalisation pratique
9.1 Réalisation de la pièce de couplage avec les cl efs
Grâce au logiciel « SolidWorks », nous avons conçu une pièce de couplage permettant detransmettre la rotation du moteur pas à pas à la clef de la guitare.
Nous l'avons réalisée ensuite avec l'imprimante 3D disponible au laboratoire de sciences l'ingénieur.
Une première pièce qui s’emboîtait parfaitement dans les clefs de notre guitare ne donna passatisfaction car le bruit du moteur pas à pas se transmettait directement à la guitare et la caisse derésonance l'amplifiait. Ce son parasite empêchait le bon fonctionnement de notre accordeur car safréquence de 100 Hz très voisine de la fréquence de résonance de la caisse de la guitare, et desfréquences des cordes que nous voulions accorder ne pouvait être filtrée facilement.
Nous avons donc conçu ensuite une nouvelle pièce en forme de U assez large qui permet de collerdes patins en feutre sur les parois. Ce sont ces patins en feutre qui sont en contact avec la clef. Ilsabsorbent suffisamment le son du moteur pour que l'accordeur ne soit pas trop perturbé.
Première version de la pièce de couplage Pièce de couplage définitive
Imprimante 3D disponible au laboratoire de SI.
Page 15

9.2 L'alimentation en énergie
L'accordeur est alimenté par un transformateur du commerce 8 V 5 A.
La commande du moteur est assurée par un circuit intégré RIT LM 350 de puissance et délivrant unetension de sortie ajustable. Il abaisse la tension de 8 V à la tension de 3 V valeur maximale admise par le moteur pas à pas. L'intensité maximale qu'il peutdélivrée est de 3 A, valeur inférieure à l'intensité de 0,9 Aconsommée par les bobines du moteur pas à pas . Il estmonté sur un radiateur car il doit dissiper environ 5 W.
9.3 Réalisation des circuits électroniques
Nous avons réalisé les circuits électroniques sur desplaques d'essais à bandes de cuivre prédécoupées.
9.4 La sélection de la corde à accorder
Un commutateur rotatif à six position est relié à l'entrée A3 de la carte Arduino. Chacune des six positions est reliée au point milieu d'un pont diviseur qui permet d'obtenir unetension comprise entre 0 et 8,2 V indiquant qui est le choix de la corde selon letableau suivant .
Corde 1 2 3 4 5 6
Tension(V 0 0,5 1 1,5 2 2,5
Ce commutateur à six positions possède deux circuits, le second circuit permetde choisir six gains différents pour l'amplificateur qui précède le comparateur àdeux seuils inverseur.
9.5 L'accordeur achevé
Voici la photo de l'accordeur terminé :et de sa mise en place sur l'une des clefs.
Page 16

10 Essais- Mise au point
On place le micro dans la caisse de résonance de la guitare.
Le premier essai d'accord sur la corde 1 fut un échec car le programme Arduino était trop simple : ilne prenait pas compte l'amortissement rapide de la corde et la lecture de la fréquence était alorserronée. De même, la phase d'excitation n'était pas écartée et le moteur tournait alors dans lemauvais sens. De plus la rotation était souvent hasardeuse. En examinant, grâce au moniteur sériedu logiciel Arduino, les valeurs mesurées de Ucorde, nous avons pu constaté que ces valeurs variaientpériodiquement autour d'une valeur moyenne, essentiellement parce que la tension délivrée par leconvertisseur fréquence tension n'est pas rigoureusement constant. Il est le siège d'une ondulationrésiduelle.
Nous avons corrigé ces défauts en introduisant des pauses de durées adaptées aux cordes , en réglant le gain de l'amplification différemment pour chaque corde afin que le signal soit compatible avec les seuils du comparateur à hystérésis, et en calculant la valeur moyenne du signal délivré par le convertisseur fréquence -tenson avant de la comparer à la consigne.
De cette façon le moteur ne tourne que quelques centaines de millisecondes après l'attaque de lanote, lorsque la corde vibre normalement et que l'amplitude de vibration est suffisante pour que leson du moteur soit négligeable devant celui émis par la caisse de résonance. Cette rotation durequelques dizaines de cycles du programme Arduino, le nombre ayant été ajusté en fonction de lacorde accordée en réalisant des essais. L'ensemble de ces opérations correspond à une secondeenviron.
Ensuite le programme attend trois secondes avant de réaliser une nouvelle mesure afin de ne pasprendre en compte les bruits parasites.
Le moteur tourne ainsi toutes les 4 secondes jusqu'à ce que la note obtenue soit correcte.
La durée d'un accordage peut être assez longue.
Lorsque la corde est accordée, le moteur ne tourne plus ou a tendance à osciller légèrement. Pour éviter ces oscillations, le programme défini un intervalle étroit centré sur la bonne valeur dans lequel on considère que la fréquence est correcte.
Cet intervalle est en valeur binaire de ± 1 soit un intervalle de tension ∆Uf = ± 2,7×10-3 V et donc un
intervalle de fréquence ∆f = ∆Uf
af= ± 2,7×10-3/7,24.10-3 = ± 0,4 Hz. qui est dans la limite d’acuité de
l'oreille moyenne.
11 Résultats
Méthode d'accord standard
Pour vérifier le bon accord de la guitare, nous avons désaccordé successivement toutes les cordes en les détendant ou en les tendant trop.
Nous enregistrons le signal correspondant à chaque corde après l'accordage à l'aide de l'interface Sysam et le logiciel Latis Pro.
Nous mesurons la période et en déduisons la fréquence de la note ainsi jouée.
Nous trouvons des différences 0,5 Hz environ entre la valeur attendue et notre valeur mesurée.
Nous utilisons aussi une application pour Smartphone qui permet d'accorder les guitares. Elle nous indique effectivement que l'accord obtenu est de bonne qualité.
Page 17
12 Conclusion La mise au point de cet accordeur nous a permis de mieux connaître la manière dont une corde de guitare vibre.
Sans l'aide du micro-contrôleurArduino, il aurait été impossible de réaliser ce dispositif.
Notre accordeur donne un bon résultat puisque la fréquence d'accord est obtenue à 0,5 Hz près, mais nous sommes conscients qu'un musicien confirmé accordera sa guitare plus rapidement et plusfacilement. Notre appareil peut cependant aider un débutant éloigné de toute personne capable de l'aider pour accorder sa guitare.même si des applications smartphones accordeur de guitare sont disponibles gratuitement.
Nous sommes très contents de cette participation au concours des Olympiades de Physique qui nous aide à approfondir nos connaissances en physique et à progresser dans notre aisance à l'oral.
Page 18

13 Annexes
13.1 Analyse de Fourier du son émis par la corde 5 d epuis l'attaque jusqu'à sa disparition.
La zone bleue indique l'intervalle de temps sur lequel est calculée la transformée de Fourier.
Spectre obtenue 120 ms après l'excitation
Spectre obtenue entre 120 ms et 200 ms après l'excitation
Page 19

Spectre obtenue entre 200 ms et 300 ms après l'excitation
Spectre obtenue entre 300 ms et 400 ms après l'excitation
Page 20

Spectre obtenue 800 ms après l'excitation
13.2 Courbes donnant la force appliquée en fonction de l’allongement des cordes
Modèles linéaires F = k×∆L
corde 1 2 3 4 5 6
écart relatif %
3,7 % 6,3 % 3,8 % 6,4 % 15 % 7,1 %
k en N/m 831 1,27×103 2,12×103 1,47×103 1,05×103 962
Page 21

13.3 Calcul de la variation de fréquence résultant d 'une petite variation de tension
Une petite variation de tension ∆Τ correspond à une variation ∆f1 de fréquence d'accord :
Dérivons la relation f1 = 12.L √T
µ par rapport à T
df 1
dF=
12Lõ
12√T
(1)
D'après les courbes donnant l'allongement de la corde en fonction de la tension appliquée, une variation de tension est donnée par ∆Τ = kcorde×∆L
Une variation de tension ∆Τ correspond à une variation ∆f1 de fréquence d'accord :
Considérons que T est la tension de la corde au voisinage de l'accord correct de la corde,
La relation permet d'écrire : ∆f1 = 1
2L√µ∆T
2√T=
12Lõ
k ∆ L2√T
13.4 Schémas des circuits électronique
13.5 Carte Arduino Uno
Carte Arduinio UNO Contrôleur de moteur 2A L298 (Shield) pour Arduino
Page 22
25 K15 k
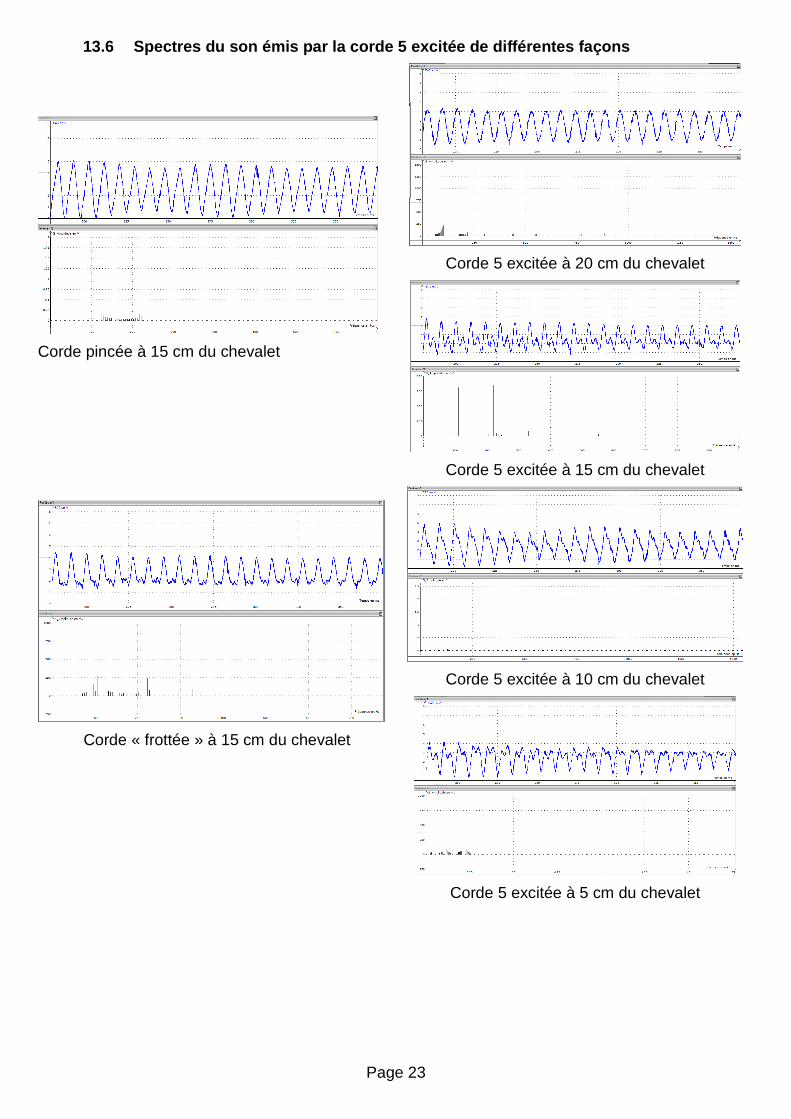
13.6 Spectres du son émis par la corde 5 excitée de différentes façons
Corde pincée à 15 cm du chevalet
Corde « frottée » à 15 cm du chevalet
Corde 5 excitée à 20 cm du chevalet
Corde 5 excitée à 15 cm du chevalet
Corde 5 excitée à 10 cm du chevalet
Corde 5 excitée à 5 cm du chevalet
Page 23

13.7 Programme Arduino/*Pilotage moteur pas à pas bipolaire phase 1 : fils noir et vrt phase 2 : fils rouge et bleu Tableau de commande du module DUal DC Motor shield Inputs EnA(B) Input 1(3) Input 2(4) M1+ (M2+) and M1- (M2-) output 1 1 1 HIGH state for both output (motor stopped) 1 0 0 LOW state for both uotput (motor stopped) 1 1 0 Current flows from M1+ to M1- (direction 1) 1 0 1 Current floes from M1- to M1+ (direction 2) 0 X X High impedance (motor is in free running */int corde;int frequence,EA3;int sortie_boucle;int note[] = 858,642,505,382, 286,212 ;//valeur binaire calculée à partir des tensions en V de chaque note//int note[] = 779,585,459,346, 259,192 ;// valeur binaires empiriques données par la valeur moyenne calculée par le programme losque les cordes sont accordéesint temps_mesure_notes[] = 20,80,60,60,60,80;//Valeur du nombre de cycles de laboucle d'accord en ternant compte de l'amortissementint M[10];
void setup() //initialize serial communication at 9600 bits per second Serial.begin(9600);analogReference(EXTERNAL);//tension pleine échelle 3,3 Vfor (int n=0;n<5;n++) //inialise les valeurs du calcul de la moyenne à 0 M[n]=0; /*initialise les pin de commande du moteur Arduino pin Function Arduino pin Function Channel A | Channel B 9 Input 1 | 2 Input 3 10 Input 2 | 6 Input 4 3 EnA (PWM) | 5 EnB (PWM) A0 Current sense| A1 Current sense pin digitale 3 : commande PWM moteur A. Sens moteur A pin 9 et 10 capteur du courant moteur A pin A0 pin digitale 5 : commande PWM moteur B. Sens moteur B pin 2 et 6 capteur du courant moteur B pin A1 */
//défintions des bornes phase A pinMode(9,OUTPUT); pinMode(10,OUTPUT); pinMode(3,OUTPUT); analogWrite(3,255); //Défintion des bornes phase B pinMode(2,OUTPUT); pinMode(6,OUTPUT); pinMode(5,OUTPUT); analogWrite(5,255); //Mise à zà©ro des deux phases digitalWrite(9,LOW); digitalWrite(10,LOW); digitalWrite(2,LOW); digitalWrite(6,LOW); // Variables utilisà©es int corde = 1;//initialise la corde à accorder à la corde 1 la plus aigue /* Tension délivrée par le convertisseur f-U et fréquence jouées par chaque corde corde 1 : 2,39 V : 330 Hz corde 2 : 1,80 V : 247 Hz corde 3 : 1,430 V : 196 Hz corde 4 : 1,069 V : 146 Hz corde 5 : 0,809 V : 110 Hz corde 6 : 0,601 V : 82 Hz */
void loop() /* Choix de la corde à accorder tensions appliquées sur l'entrée EA3 selon la position du commutateur rotatif 0 V soit EA3 = 0 en binaire : corde la plus grave n °6 0,5 V soit EA3 = 178 en binaire : corde n °5 1 V soit EA3 = 359 en binaire : corde n °4 1,5 V soit EA3 = 538 en binaire : corde n °3 2 V soit EA3 = 717 en binaire : corde n °2 2,5 V soit EA3 = 896 en binaire : corde n °1 */ //corde = 1;//par défaut l'accordeur est sensé accorder la corde n°1 EA3 = analogRead(3);// Choix de la corde à accorder
if (EA3<80) corde =6; if ((EA3>100)&&(EA3<250)) corde=5; if ((EA3>270)&&(EA3<430)) corde=4; if ((EA3>470)&&(EA3<610)) corde=3; if ((EA3>650)&&(EA3<790)) corde=2; if ((EA3>820)&&(EA3<960)) corde=1;
//Boucle d'accordage de la corde sortie_boucle= 0;
frequence = analogRead(2); Serial.print(frequence); Serial.print(':'); Serial.print(EA3); Serial.print(':'); Serial.print(corde); Serial.print(':'); Serial.println(note[corde-1]);
if (frequence>150) switch (corde) case 6 : delay(150); case 5 : delay(10); case 4 : delay(10); case 3 : delay(10); case 2 : delay(250); case 1 : delay(10);
while (sortie_boucle<temps_mesure_notes[corde-1]) frequence = analogRead(2); if (frequence>150) long moyenne =0; for(int n=0;n<300;n++) frequence = analogRead(2); moyenne =moyenne+frequence; frequence = int(moyenne/300); Serial.println(frequence);
Page 24

if (corde== 6) rotation_moteur(); if (corde== 5) rotation_moteur(); if (corde== 4) if ((frequence>250)&&(frequence<450)) rotation_moteur(); if (corde==3) if ((frequence>400)&&(frequence<550)) rotation_moteur(); if (corde==2) if ((frequence>500)&&(frequence<660)) rotation_moteur(); if (corde==1) if ((frequence>700)&&(frequence<950)) rotation_moteur();
sortie_boucle++; delay(25); arret_moteur(); if (corde==1) delay(500); if (corde==2) delay(500); if (corde==3) delay(500); if (corde==4) delay(1000); if (corde==5) delay(2000); if (corde==6) delay(2000); else digitalWrite(10,LOW); digitalWrite(9,LOW);
digitalWrite(2,LOW); digitalWrite(6,LOW); void rotation_moteur()
if (frequence<note[corde-1]-1) sens_horaire(); if (frequence>note[corde-1]+1) sens_antihoraire(); if ((frequence<=note[corde-1]+1)&&(frequence>=note[corde-1]-1)) arret_moteur();
void sens_horaire() digitalWrite(9,HIGH); digitalWrite(10,LOW); delay(10); digitalWrite(2,LOW); digitalWrite(6,HIGH); delay(10); digitalWrite(9,LOW); digitalWrite(10,HIGH); delay(10); digitalWrite(2,HIGH); digitalWrite(6,LOW); delay(10);
void sens_antihoraire() digitalWrite(10,HIGH); digitalWrite(9,LOW); delay(10); digitalWrite(2,LOW); digitalWrite(6,HIGH); delay(10); digitalWrite(10,LOW); digitalWrite(9,HIGH); delay(10); digitalWrite(2,HIGH); digitalWrite(6,LOW); delay(10);
void arret_moteur() digitalWrite(10,LOW); digitalWrite(9,LOW);
digitalWrite(2,LOW); digitalWrite(6,LOW);
13.8 Caractéristiques du moteur pas à pas
Page 25

13.9 Le circuit LM 350
13.10 Le câblage du circuit électronique
Page 26

13.11 Buget
Libellé Recettes Dépenses
Subvention Olympiades Physique 250 €
Alimentation à découpage 44,9 €
Moteur pas à pas 47,9 €
Composants électroniques 85,78 €
Microphone amplifié 9,86 €
Cordon USB 4,5 €
Platine Arduino 25,9 €
Coffret en plastique 15,9 €
Cordes guitare 15 €
frais port 14 €
250 € 263,74 €
Page 27