Embed Size (px)
Citation preview

RAZLOMLJENO LINEARNO
PROGRAMIRANJE
(31.5.2017.)
Doc. dr. sc. Tunjo Perić
9.5.2017 1

Problem razlomljeno linearnog programanja izgleda ovako:
p.o.
Pri tome su C i D vektori koeficijenata iz linearne funkcije cilja u
brojniku i nazivniku, a X je vektor varijabli, svi formata (n, 1), tj. s
n redaka i jednim stupcem.
A je matrica tehničkih koeficijenata formata (m, n), b je vektor
slobodnih članova formata (m, 1), dok su c0 i d0 skalari (realni
brojevi).
Očito je skup mogućih rješenja jednak kao u problemu linearnog
programiranja.
T
0
T
0
maxC X c
zD X d
AX b
0X
(1)
(2)
(3)
9.5.2017 2

Razlomljeno linearno programiranje je pogodno za otptimizaciju
odnosa između različitih ekonomskih veličina. Posebno je
interesantna primjena s ciljem maksimizacije produktivnosti,
ekonomičnosti i rentabilnosti.
Osnovni teorijski rezultati na kojima se zasniva razlomljeno
linearno programiranje:
(a) Skup mogućih rješenja S = {X: AX b, X 0} je neprazan i
ograničen. Skup S je konveksan, a budući da je ograničen on je i
konveksni poliedar.
Dakle, skup mogućih rješanja ima konačan broj ekstremnih točaka,
i svaka točka iz S može se izraziti kao konveksna kombinacija
njegovih ekstremnih točaka.
(b) Nazivnik fukcije cilja je pozitivan, tj. funkcija cilja je
kontinuirana (nazivnik nikad nije jednak nuli). Dakle imamo:
T
00, .D X d X S
9.5.2017 3

Teorem 1. Problem (1) – (3) uz uvjete (a) i (b) ima maksimum u
nekoj ekstremnoj točki skupa S.
Dokaz:
S je konveksni poliedar pa ima konačan broj ekstremnih točaka.
Neka su L1, L2, ... , Lk sve ekstremne točke skupa S. Neka je V
S bilo koje moguće rješenje, tj. bilo koja točka skupa S. Ta se točka
može prikazati kao konveksna kombinacija ekstremnih točaka
skupa S, tj. vrijedi:
Označimo nadalje funkciju cilja na sljedeći način:
Neka je Lh ona ekstremna točka skupa S u kojoj funkcija z poprima
najveću vrijednost.
1 1 2 2
1 1
V L L ... L L , 1, 0.k k
k k i i i i
i i
T 1
0
T 2
0
( ).
( )
C X c z Xz
D X d z X
9.5.2017 4

Prema tome, vrijedi
Treba dokazati da je točka Lh ujedno i rješenje za cijeli problem
RLP, tj. da je “bolja” od svih ostalih točaka skupa S, odnosno da
vrijedi:
Imamo:
Budući da je z2 > 0 za , pa i za Li, množenje s nazivnikom
neće promijeniti orijentaciju nejednakosti, te imamo:
Pomnožimo li tu relaciju redom s i sve te relacije
zbrojimo dobivamo:
(L ) (L ), 1,2,..., .h i
z z i k
(L ) (V), V S.h
z z
1 1
2 2
(L ) (L )(L ) (V) .
(L ) (L )
h i
h
h i
z zz z
z z
V S
1 2 1 2(L ) (L ) (L ) (L ).
h i i hz z z z
1 2, , ...,
k
2 2 1
1
1 1
(L ) (L ) (L ) (L )k k
h i i h i i
i i
z z z z
(*)9.5.2017 5

Sume u toj formuli možemo izračunati posebno, pa imamo:
Analogno je
Uvrstimo li to u relaciju (*), dobivamo:
iz čega, budući da su nazivnici funkcija cilja (DTV + d0) i z2(Lh)
pozitivni, slijedi:
odnosno
što je i trebalo dokazati.
2 T T T
0 0 0
1 1 1 1
(L ) ( L ) L Vk k k k
i i i i i i i
i i i i
z D d D d D d
1 T
0
1
(L ) V .k
i i
i
z C c
1 2
0 0(L ) ( V ) (L ) ( V ),
T T
h hz D d z C c
1
0
2
0
(L ) V,
(L ) V
T
h
T
h
z C c
z D d
( ) (V), V ,h
z L z S
9.5.2017 6

Dakle, vrijednost funkcije cilja za “najbolju” ekstremnu točku veća
je nego vrijednost funkcije cilja za bilo koje moguće rješenje
problema RLP (V S), pa je točka Lh optimalno rješenje problema
(1) – (3).
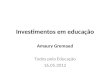
Primjer 1: Naći optimalno rješenje problema
p.o.
Zahvaljujući teoremu 1 možemo riješiti ovaj primjer, budući da sve
njegove ekstremne točke možemo pronaći prikažemo li skup
mogućih rješenja grafički (slika 1).
1 2
1 2
2 2 1max
2 3
x xz
x x
1 2
1 2
1 2
3 4 24
2 5
, 0.
x x
x x
x x
9.5.2017 7

x1
x2
D(0, 6)
C(4, 3)
B(5/2, 0)A(0, 0)
S
9.5.2017 8

Ekstremne točke tog skupa su: A(0, 0), B(5/2, 0), C(4, 3) i D(0, 6),
pa vijednosti funkcije cilja u tim točkama su z(0, 0) = - , z(5/2, 0)
= , z(4, 3) = 1, z(0, 6) = .
Maksimalna vrijednost funkcije cilja postiže se u točki C = (4, 3) i
njezina vrijednost je 1. Dakle, imamo: x1* = 4, x2* = 3 i z* = 1.
Martoseva metoda
Prethodni teorem omogućio je mađarskom matematičaru Beli
Martosu da modifikacijom simpleks algoritma dođe do optimalnog
rješenja problema rezlomljeno linearnog programiranja.
Ova metoda ide od jedne do druge ekstremne točke skupa mogućih
rješenja uz uvjet da vrijednost funkcije cilja iz koraka u korak bude
sve veća, naravno ako se radi o problemu maksimuma.
Ovdje je potrebno samo odrediti kriterij za izbor vektora koji ulazi
u novu bazu, prilagođen za problem RLP.
1
38
11
11
15
9.5.2017 9

Definirajmo izraze
pri čemu su tij i ti0 koeficijenti razvoja vektora Aj i b u tekućoj bazi,
kao i u simpleks metodi.
Vrijednost predstavlja vrijednost funkcije cilja za tekuće
bazično rješenje.
Budući da su brojnik i nazivnik razlomljene funkcije cilja ponovo
linearne funkcije, vrijedi da se ulaskom novog vektora Aj u bazu
vrijednosti izraza z1 i z2 mijenjaju, tj.
1
1
m
j ij i
i
z t c
2
1
m
j ij i
i
z t d
1
0 0
1
m
i i
i
z t c c
2
0 0
1
m
i i
i
z t d d
(4)(5)
(6)(7)
1
2
z
z
9.5.2017 10

i1 1 1 1 1( ) ( )
j j j jz z c z z z c
2 2 2 2 2( ) ( ),
j j j jz z d z z z d
gdje je
Pretpostavimo da je početno bazično rješenje nedegenerirano, tj. ti0
> 0, za svako i, pa je > 0.
Da bi se ulaskom vektora Aj u bazu vrijednost funkcije cilja
povećala, mora vrijediti:
iz čega slijedi
0min , 0.i
iji
ij
tt
t
1 1 1
2 2 2
( ),
( )
j j
j j
z z c z
z z d z
9.5.2017 11

1 2 2 1
2 2 2
( ) ( )0.
( )
j j j j
j j
z z d z z c
z z z d
U nazivniku lijeve strane te nejednadžbe su vrijednosti nazivnika
funkcije cilja (prije i poslije ulaska vektora Aj u bazu), koji su
pozitivni za sva moguća rješenja. Budući da je, pored toga, > 0,
da bi vrijedila gornja nejednadžba, dovoljno je da bude ispunjeno:
Odnosno u obliku determinante
Prema tome, da bi se povećala vrijednost razlomljene funkcije cilja
uvođenjem vektora Aj u bazu potrebno je izabrati takav vektor za
kojega je determinanta pozitivna. To je kriterij za izbor vektora
koji ulazi u bazu.
1 2 2 1( ) ( ) 0
j j j jz z d z z c (8)
1 1
2 20
j j
j
j j
z z c
z z d
(9)
j
9.5.2017 12

Prema tome, za optimalnost rješenja kod problema maksimuma
dovoljan uvjet je
Dakle, u svakoj tablici Martoseve metode imat ćemo tri retka zj – cj,
tj. , i redak za . Pored toga uz vektore Aj potrebno
je napisati koeficijente funkcije cilja i iz brojnika (cj) i iz nazivnika
(dj).
Riješimo primjer 1 Martosevom metodom.
Problem je potrebno najprije prevesti u kanonski oblik, tj. dodati
dvije dopunske varijable (x3, x4), te on izgleda ovako:
p.o.
0,j
j
1
j jz c 2
j jz d j
1 2 3 4
1 2 3 4
2 2 0 0 1max
2 0 0 3
x x x xz
x x x x
1 2 3
1 2 4
1 2 3 4
3 4 24
2 5
, , , 0.
x x x
x x x
x x x x
9.5.2017 13

ci -1 2 2 0 0
di 3 1 2 0 0
Baza b A1 A2 A3 A4
0 0 A3 24 3 4 1 0
0 0 A4 5 2 -1 0 1
-1 -2 -2 0 0
3 -1 -2 0 0
-1/3 7 8 0 0
1
j jz c
2
j jz d
j
Tablica 1
9.5.2017 14

ci -1 2 2 0 0
di 3 1 2 0 0
Baza b A1 A2 A3 A4
2 2 A2 6 ¾ 1 ¼ 0
0 0 A4 11 11/4 0 ¼ 1
11 -1/2 0 ½ 0
15 ½ 0 ½ 0
11/15 13 0 -2 0
1
j jz c
2
j jz d
j
Tablica 2
9.5.2017 15

ci -1 2 2 0 0
di 3 1 2 0 0
Baza b A1 A2 A3 A4
2 2 A2 3 0 1 2/11 -3/11
2 1 A1 4 1 0 1/11 4/11
13 0 0 6/11 2/11
13 0 0 5/11 -2/11
1 0 0 -13/11 -52/11
1
j jz c
2
j jz d
j
Tablica 3
Budući da su svi , dobiveno je optimalno rješenje problema
RLP: x1* = 4, x2* = 3, x3* = x4* = 0 i z* = 1.
0j
9.5.2017 16

Problem RLP (1) – (3) može se transformacijom Y = t X svesti na
problem linearnog probramiranja. Po pretpostavci je nazivnik
funkcije cilja pozitivan za sva moguća rješenja, tj. DTX + d0 > 0,
X S.
Uvedimo supstituciju Y = t X, odnosno . Time problem
RLP (1) – (3) prelazi u
p.o.
odnosno
1X Y
t
T
0
T
0
1
max '1
C Y ctz
D Y dt
1
10,
A Y bt
Yt
9.5.2017 17
Charnes – Cooper-ova metoda

p.o.
Postavimo li uvjet da nazivnik nove funkcije cilja bude jednak 1, tj.
tražimo li novu varijablu t takvu da vrijedi DTY + d0t = 1,
dobivamo problem linearnog programiranja koji ima jednu novu
varijablu t i jedno dodatno ograničenje.
Problem linearnog programiranja, koji korespondira problemu RLP
(1) – (3), ima sljedeći oblik:
T
0
T
0
max 'C Y c t
zD Y d t
0
, 0.
AY bt
Y t
9.5.2017 18

0max ' ( )
Tz C Y c t
p.o. 0AY bt
T
01D Y d t
, 0Y t
Ako je Y*, t* optimalno rješenje tog problema, tada je
Optimalno rješenje problema RLP.
Primjer 2. Poduzeće proizvodi dva proizvoda, označimo ih s “A” i
“B”. Proizvodnja se odvija na dva stroja, stroj 1 i stroj 2. Za
proizvodnju proizvoda “A” potrebno je 1 sat rada stroja 1 i 2 sata
rada stroja 2. Za proizvodnju proizvoda “B” potrebno je 2.5 sati
rada stroja 1 i 1 sat rada stroja 2. Ukupno raspoloživo vrijeme rada
strojeva je 8 sati.
*
1* *X Y
t (15)
(11)
(12)
(13)
(14)
9.5.2017 19

Varijabilni troškovi za proizvodnju proizvoda “A” i “B” iznose 28 i
20 dolara, respektivno. Ukupni dnevni fiksni troškovi iznose 1000
dolara.
Odrediti optimalni plan dnevne proizvodnje, kao cilj koristiti
maksimizaciju produktivnosti rada radnika (omjer ukupnog obujma
proizvodnje i ukupnih troškova).
Rješenje: Pretpostavimo da postoji kontinuirana djeljivost proizvoda
“A” i “B”.
x1 = obujam dnevne proizvodnje proizvoda “A”
x2 = obujam dnevne proizvodnje proizvoda “B”
p.o.
1 2
1 2
max28 20 1000
x xz
x x
1 2
1 2
1 2
2.5 8
2 8
, 0
x x
x x
x x
9.5.2017 20

Uvođenjem supstitucije Y = tX, Charnes – Cooperova linearizacija
izgleda ovako:
p.o.
y1, y2, t 0
Simpleks metodom dobiveno je optimalno rješenje problema: y1 =
0.027, y2 = 0.0018 i t = 0.0009. Budući da smo uveli supstituciju Y =
tX, imamo
1 2max 'z y y
1 2
1 2
1 2
2.5 8 0
2 8 0
28 20 1000 1
y y t
y y t
y y t
* 1
1
* 2
2
0.00273
0.0009
0.00182.
0.0009
yx
t
yx
t
9.5.2017 21
* 3 2 50.004448.
28 3 20 2 1000 1124z