Embed Size (px)
Citation preview

REBOBINADOR DE FIOS
Cauan Duarte
Fernando Escaleira Calza
Leonardo Fernandes Anelli
Leonardo Nicolau de Lima
Manoel Cahú
Marcelo Galhardo Franco
Victor Pirinausky
Vinicius Diniz Coe
Yuri Fontanelli D`Ângelo
Professores Orientadores:
Nubas Custódio
Eduardo
São Caetano do Sul / SP
2012
TRABALHO DE CONCLUSÃO DO CURSO TÉCNICO EM MECATRÔNICA
Centro Estadual de Educação Tecnológica Paula Souza
GOVERNO DO ESTADO DE SÃO PAULO
Etec “JORGE STREET”

REBOBINADOR DE FIOS
Trabalho de Conclusão de Curso
apresentado como pré-requisito para
obtenção do Diploma de Técnico em
Mecatrônica.
São Caetano do Sul / SP
2012

REBOBINADOR DE FIOS
Trabalho de Conclusão de Curso
apresentado como pré-requisito para
obtenção do Diploma de Técnico em
Mecatrônica.
Professor(es) Orientador(es):
Nubas Custódio
Eduardo
Avaliação:______________________
Nome e Assinatura do(s) professor(es) responsável(is):
São Caetano do Sul / SP
2012

AGRADECIMENTOS
Nós queríamos agradecer primeiramente aos nossos pais, irmãos, amigos e
colegas, pela cumplicidade e apoio durante a realização do nosso projeto, e pela
força que sempre nos deram durante todas as etapas do nosso curso. Queríamos
agradecer também a todos os professores que nos passaram um enorme
conhecimento durante estes três anos, tanto os professores do ensino médio quanto
os do ensino técnico, e principalmente aos professores Eduardo e Nubas, pois foram
os nossos professores orientadores durante o nosso projeto e sem a ajuda deles o
nosso projeto não teria sido realizado.

RESUMO
Primeiramente nós fomos a algumas empresas para conseguirmos ter
ideias para o nosso projeto, em uma das empresas, a eletrotécnica SACCH,
eles nos deram a ideia de fazer o "Rebobinador de fios", foi a partir deste
momento que percebemos o quanto nosso projeto seria importante para várias
empresas, pois nestas empresas que trabalham com fio de cobre é necessário
o uso de carretéis de fio de cobre pequenos, mas os carretéis de fio de cobre
que são comercializados são grandes e com o REBOBINADOR DE FIOS a
empresa pode passar o fio de cobre do carretel grande que foi comprado para
um carretel pequeno, o que permitirá um uso melhor do fio de cobre pela
empresa. Fomos informados de que por falta de uma máquina como esta o
enrolamento do fio de cobre era feito manualmente por algum funcionário, e
isto foi outro motivo para que projetemos esta máquina, pois manualmente a
empresa perderia tempo e dinheiro e também pode causar alguns riscos para o
funcionário.
Palavras-chave: fio; segurança; automatização.

LISTA DE FIGURAS
FIGURA 1- SUPORTE DA POLIA DO CARRO GUIA 11 FIGURA 2 - ESQUEMA DO SUPORTE DA POLIA DO CARRO GUIA 12 FIGURA 3 – POLIA SEM CANAL 12 FIGURA 4 – ESQUEMA DA POLIA SEM CANAL 13 FIGURA 5 – POLIA COM CANAL 13 FIGURA 6 – ESQUEMA DA POLIA COM CANAL 14 FIGURA 7 – SUPORTE FIXO 14 FIGURA 8 – ESQUEMA DO SUPORTE FIXO 15 FIGURA 9 – TRILHO DO SUPORTE FIXO 15 FIGURA 10 – ESQUEMA DO TRILHO DO SUPORTE FIXO 16 FIGURA 11 – SUPORTE DO MOTOR DO CARRO GUIA 16 FIGURA 12 – ESQUEMA DO SUPORTE DO MOTOR DO CARRO GUIA 17 FIGURA 13 – MÃO FRANCESA 17 FIGURA 14 – ESQUEMA DA MÃO FRANCESA 18 FIGURA 15 – SUPORTE DO SENSOR 18 FIGURA 16 – ESQUEMA DO SUPORTE DO SENSOR 19 FIGURA 17 – SUPORTE DA PORCA 19 FIGURA 18 - ESQUEMA DO SUPORTE DA PORCA 20 FIGURA 19 – PLACA CONTROLADORA 20 FIGURA 20 – SISTEMA ELÉTRICO DA PLACA CONTROLADORA 21 FIGURA 21 – PLACA DO DRIVER DO STEP MOTOR 21 FIGURA 22 – SISTEMA ELÉTRICO DA PLACA DO DRIVER DO STEP MOTOR 22 FIGURA 23 – PLACA DOS SENSORES ÓPTICOS 22 FIGURA 24 – PLACA DOS SENSORES ÓPTICOS E OS DOIS SENSORES ÓPTICOS 23 FIGURA 25 – SENSOR ÓPTICO DA POSIÇÃO ZERO DA MÁQUINA 23 FIGURA 26 – SENSOR ÓPTICO DO NÚMERO DE VOLTAS 24 FIGURA 27 – SISTEMA ELÉTRICA DA PLACA DOS SENSORES ÓPTICOS 24 FIGURA 28 – DISCO DO FREIO DE FOUCAULT 25 FIGURA 29 – IMÃS DO FREIO DE FOUCAULT 25 FIGURA 30 – POLIAS SENDO SERRADAS POR NÓS NA SERRA DE FITA 26

SUMÁRIO
INTRODUÇÃO .................................................................................................................................................. 8 1 - OBJETIVOS GERAIS ...................................................................................................................................... 8
1.1- Objetivos Específicos .................................................................................................................................... 9 2- SITUAÇÃO PROBLEMA ................................................................................................................................. 9 3 - JUSTIFICATIVAS .......................................................................................................................................... 10
3.1- Economia .................................................................................................................................................... 10 4 - METODOLOGIA .......................................................................................................................................... 10
4.1- Pesquisa Bibliográfica ................................................................................................................................. 10 5 - REBOBINADOR DE FIOS .............................................................................................................................. 10 6 - DESCRIÇÃO GERAL DO FUNCIONAMENTO ................................................................................................. 11 7 – IMAGENS DO PROJETO .............................................................................................................................. 11 8 – FREIO DE FOUCAULT.................................................................................................................................. 25 9 – DIAGRAMA EM BLOCOS ............................................................................................................................ 27 10 – FLUXOGRAMA ......................................................................................................................................... 28 11 – PROGRAMAS ........................................................................................................................................... 33
11.1 - Programa 1 ............................................................................................................................................... 33 11.2 – Programa 2 .............................................................................................................................................. 34 11.3 – Programa 3 .............................................................................................................................................. 42
11.4 – Programa 4 .............................................................................................................................................. 43 11.5 – Programa 5 .............................................................................................................................................. 44 12 – TABELA DE CUSTOS ................................................................................................................................. 46 13 – CRONOGRAMA DE TAREFAS .................................................................................................................... 47 14 –FMEA.....................................................................................................................................................48 15 - CONCLUSÃO ............................................................................................................................................. 49

8
INTRODUÇÃO
Quando as pessoas encontram algum problema em alguma atividade do seu
dia-a-dia elas querem achar alguma solução para este problema, e desta vontade de
achar uma solução é que surgem os grandes inventos que nos permite solucionar
estes problemas e melhorar nossa qualidade de vida. As pessoas de hoje estão
querendo cada vez mais modernidade, mais conforto, mais praticidade e
entretenimento, e isso fez com que em todos os lugares que nós vamos tenham
aparelhos eletrônicos e eletrodomésticos, para o funcionamento destes aparelhos é
necessário também a ligação elétrica, para tudo isso é necessário o uso do fio de
cobre que é usado para a transmissão da energia.
Com essa evolução da tecnologia e da necessidade das pessoas de
possuírem estes aparelhos eletrônicos surgem também cada vez mais empresas
que trabalhem com a parte elétrica. Estas empresas usam e muito fios de cobre,
muitas dessas empresas usam o fio de cobre em menor escala e precisariam de um
carretel de fio um pouco menor, porém é comercializado apenas carretéis grandes o
que dificulta um pouco o trabalho nessas empresas.
Pensando no lucro e na comodidade das empresas para trabalharem com o
fio de cobre da melhor maneira é que nosso grupo de pesquisa desenvolveu o
REBOBINADOR DE FIOS.
Esta máquina tem como função solucionar o problema das empresas que
trabalham no ramo da elétrica evitando uma perda de tempo e dinheiro, e também
gerando mais conforto para a empresa e seus trabalhadores.
O equipamento é simples e prático, funciona com o auxílio de um Motor
Elétrico 24VCC, capaz de girar o carretel, a cada giro do carretel o motor de passo é
acionado e da um passo. Com os movimentos cooperados, a máquina e capaz de
enrolar o fio sem deixar espaços vazios.
1 - OBJETIVOS GERAIS
O Trabalho de Pesquisa em grupo, que será apresentado aqui para obtenção
do Diploma de Técnico, tem como objetivo a aplicação dos conhecimentos
multidisciplinares adquiridos no decorrer dos três anos do Curso de MECATRÔNICA
da ETEC Jorge Street em São Caetano do Sul. Assim, neste projeto, nosso grupo

9
tentou atender as necessidades das empresar e obter o grau necessário para a
conclusão do curso. Para isso, os integrantes precisaram interagir com pessoas,
mas principalmente com a empresa interessada. Esta interação facilitou para nós
alunos e ainda fez com que nós obtivéssemos informações além do que
esperávamos.
A pesquisa também nos deu detalhes que despertaram em nós participantes,
a curiosidade, que também é muito importante no ensino. Detalhes como: a
necessidade de ouvir diversas opiniões para se chegar a uma conclusão acertada;
aprender a trabalhar em grupo; e outros. Uma pesquisa só pode ser concluída após
a superação de tentativas e erros.
Na fase de elaboração da monografia, também houve a necessidade de
pesquisas na área de Língua Portuguesa.
Portanto, o grupo espera que, ao final dessa apresentação, estes objetivos
tenham sido plenamente atingidos, para que possamos obter o nosso diploma com
muito merecimento.
1.1- Objetivos Específicos
Projetar uma máquina que automatize o processo de transporte de fio de cobre
de um carretel maior para um carretel menor proporcionando comodidade a
funcionários e mais rapidez no processo das empresas, e, identificar e ressaltar a
importância desta máquina para muitas empresas.
2- SITUAÇÃO PROBLEMA
De acordo com a empresa ELETROTÉCNICA SACCH, no transporte do fio de
um carretel para o outro, era utilizado um motor. Porém o usuário era obrigado a
conduzir o fio manualmente. A empresa também pensou na parte econômica, já que
caso haja a compra do carretel maior, o fio pode não ser todo utilizado, o que
acarretaria numa perda de material, e logo de lucro.

10
3 - JUSTIFICATIVAS
A construção desse projeto justifica-se plenamente na necessidade de
segurança para os operadores da máquina. Além da segurança, o operador não terá
a necessidade de ficar na frente da máquina, esperando o carretel ser preenchido.
Isto acarretará na melhora da velocidade do processo de produção, já que o
operador poderá efetuar outras atividades.
3.1- Economia
Haverá economia de tempo e dinheiro.
Tempo: o funcionário poderá exercer outras atividades durante o processo, já que o
sensor ira reconhecer quando o carretel estiver cheio, e os motores farão o
processo.
Dinheiro: muitas vezes a quantidade de fio no carretel maior não é toda utilizada,
logo o carretel pequeno se faz necessário para não haver desperdício.
4 - METODOLOGIA
Para desenvolver este projeto foi utilizado o método de engenharia,
fundamentado em BRAINSTORM.
4.1- Pesquisa Bibliográfica
A Pesquisa Bibliográfica foi feita diretamente aos Livros e algumas pesquisas
foram feitas na internet em alguns sites relacionados a engenharia.
5 - O REBOBINADOR DE FIOS
O REBOBINADOR DE FIOS é um dispositivo eletromecânico desenvolvido para
ser aplicado na Indústria de Cabos e terceiros. Está relacionado a área de
Automação e sua finalidade é minimizar os transtornos e maximizar o lucro..

11
Para desenvolvê-lo, nós fomos diretamente à empresa ELETROTECNICA
SACCH. Eles apresentaram quais pontos do processo já utilizado nos devíamos
melhorar.
Tendo como base inicial a necessidade de proteger os funcionários e
automatizar o processo.
6 - DESCRIÇÃO GERAL DO FUNCIONAMENTO
O REBOBINADOR DE FIOS será utilizado em empresas onde é necessário o
uso de fios para a produção de carretéis em pequena e larga escala. Ele consiste
em um equipamento que transfere o fio de um carretel para outro, através de um
sistema de polias e correia, sensores, motores e um carro guia que delimitara o
caminho do fio.
Ao ser acionado, o sensor indutivo de proximidade desligará o motor
terminando o processo de transferência do fio.
7 –IMAGENS DO PROJETO
FIGURA 1 – SUPORTE DA POLIA DO CARRO GUIA

12
FIGURA 2 – ESQUEMA DO SUPORTE DA POLIA DO CARRO GUIA
Este suporte tem a função de sustentar a polia, pela a qual o fio será guiado. Material: AÇO 1020, o qual tem 0,20% de carbono. É de fácil usinabilidade e baixa dureza, é utilizado na peça por ter baixo custo.
FIGURA 3 - POLIA SEM CANAL

13
FIGURA 4 – ESQUEMA DA POLIA SEM CANAL
Essa polia tem a função de dar suporte ao carretel.
Material: Madeira. Escala: 1:1,5
FIGURA 5 – POLIA COM CANAL

14
FIGURA 6 – ESQUEMA DA POLIA COM CANAL
Esta polia tem a função de dar suporte e tracionar o carretel. Material: Madeira. Escala: 1:1,5
FIGURA 7 – SUPORTE FIXO

15
FIGURA 8 – ESQUEMA DO SUPORTE FIXO
Tem como função dar suporte para a polia, que dá suporte ao carretel. Nele é acoplado a capa do rolamento. Material: AÇO 1020, o qual tem 0,20% de carbono. Escala: 1:2
FIGURA 9 – TRILHO DO SUPORTE FIXO

16
FIGURA 10 – ESQUEMA DO TRILHO DO SUPORTE FIXO
O trilho serve para conseguir adaptar a distância do suporte fixo, de acordo com o tamanho do carretel. Material: AÇO 1020, o qual tem 0,20% de carbono. Escala: 1:1
FIGURA 11 – SUPORTE DO MOTOR DO CARRO GUIA

17
FIGURA 12 – ESQUEMA DO SUPORTE DO MOTOR DO CARRO GUIA
Tem como função fixar o motor que tracionara o eixo do carro guia. Material: AÇO 1020, o qual tem 0,20% de carbono. Escala: 1:1
FIGURA 13 – MÃO FRANCESA
18
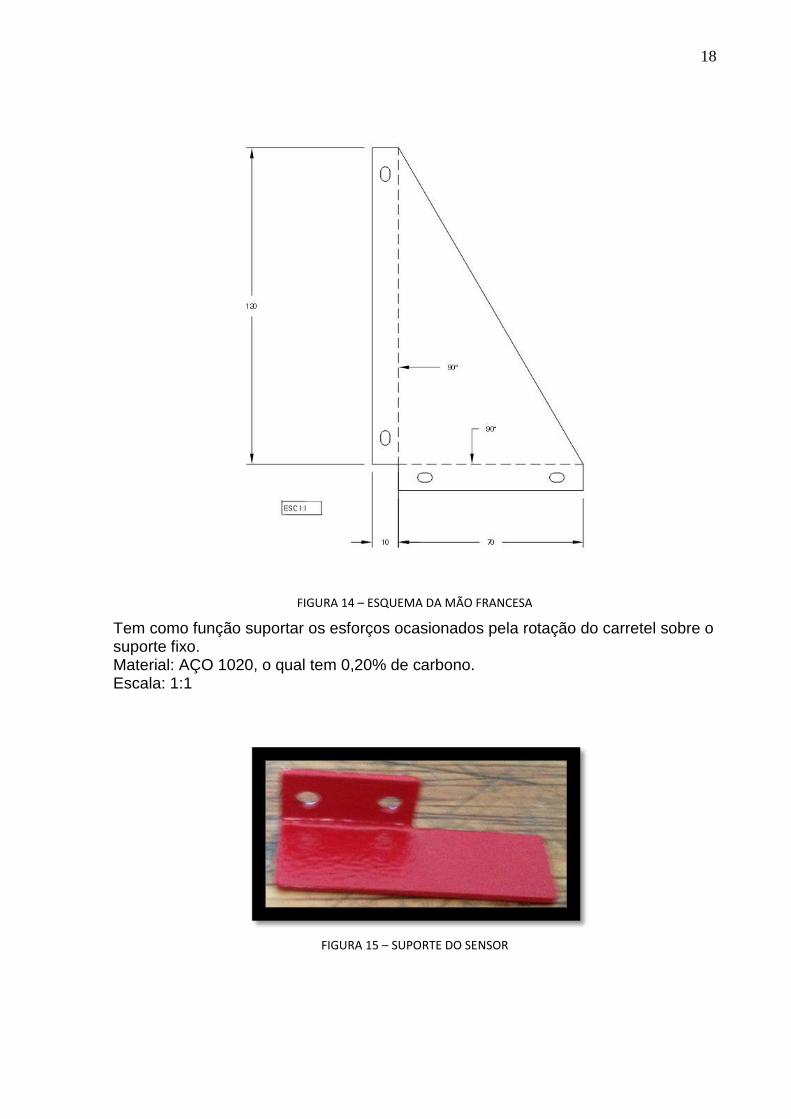
FIGURA 14 – ESQUEMA DA MÃO FRANCESA
Tem como função suportar os esforços ocasionados pela rotação do carretel sobre o suporte fixo. Material: AÇO 1020, o qual tem 0,20% de carbono. Escala: 1:1
FIGURA 15 – SUPORTE DO SENSOR

19
FIGURA 16 – ESQUEMA DO SUPORTE DO SENSOR
Este suporte sem a função de fixar o sensor, o qual será o fim de curso do carro guia. Material: AÇO 1020, o qual tem 0,20% de carbono. Escala: 1:0,6
FIGURA 17 – SUPORTE DA PORCA

20
FIGURA 18 – ESQUEMA DO SUPORTE PORCA
Esse suporte segura à rosca, esta permite a movimentação do carro guia pelo eixo. Material: AÇO 1020, o qual tem 0,20% de carbono. Escala: 1:1
FIGURA 19 – PLACA CONTROLADORA

21
A Placa Controladora faz o controle de todos os processos que ocorrem no nosso programa, desde os sensores ópticos até o motor do carro guia. O nosso motor conta 200 passos por volta, cada volta são 6,6 milímetros, e cada passo é igual a 0,033 milímetros.
FIGURA 20 – SISTEMA ELÉTRICO DA PLACA CONTROLADORA
FIGURA 21 – PLACA DO DRIVER DO STEP MOTOR

22
A função dessa placa é acionar o motor de passo que dará movimento ao carro guia que guiará o fio durante todo o processo.
FIGURA 22 – SISTEMA ELÉTRICO DA PLACA DO DRIVER DO STEP MOTOR
FIGURA 23 – PLACA DOS SENSORES ÓPTICOS

23
Um dos sensores ópticos tem como função contar as voltas e manter a velocidade do carretel constante, o outro tem como função mostrar a posição inicial do carro guia.
FIGURA 24 – PLACA DOS SENSORES ÓPTICOS E OS DOIS SENSORES ÓPTICOS
FIGURA 25 – SENSOR ÓPTICO DA POSIÇÃO ZERO DA MÁQUINA

24
FIGURA 26 – SENSOR ÓPTICO DO NÚMERO DE VOLTAS
FIGURA 27 – SISTEMA ELÉTRICO DA PLACA DOS SENSORES ÓPTICOS

25
8 - FREIO DE FOUCAULT
FIGURA 28 – DISCO DO FREIO DE FOUCAULT
FIGURA 29 – IMÃS DO FREIO DE FOUCAULT

26
O Freio de Foucault tem como função fazer com que o carretel que estiver passando o fio não ultrapasse a velocidade determinada pelo operador. Conforme o carretel cheio for ficando mais leve ele pode aumentar sua velocidade e o freio de foucault manterá a velocidade dele. Os imãs formam no disco de alumínio um campo magnético gerando uma atração entre o imã e o disco fazendo com que o carretel não ultrapasse a velocidade pré-estabelecida.
FIGURA 30 – POLIAS SENDO SERRADAS POR NÓS NA SERRA DE FITA.
27
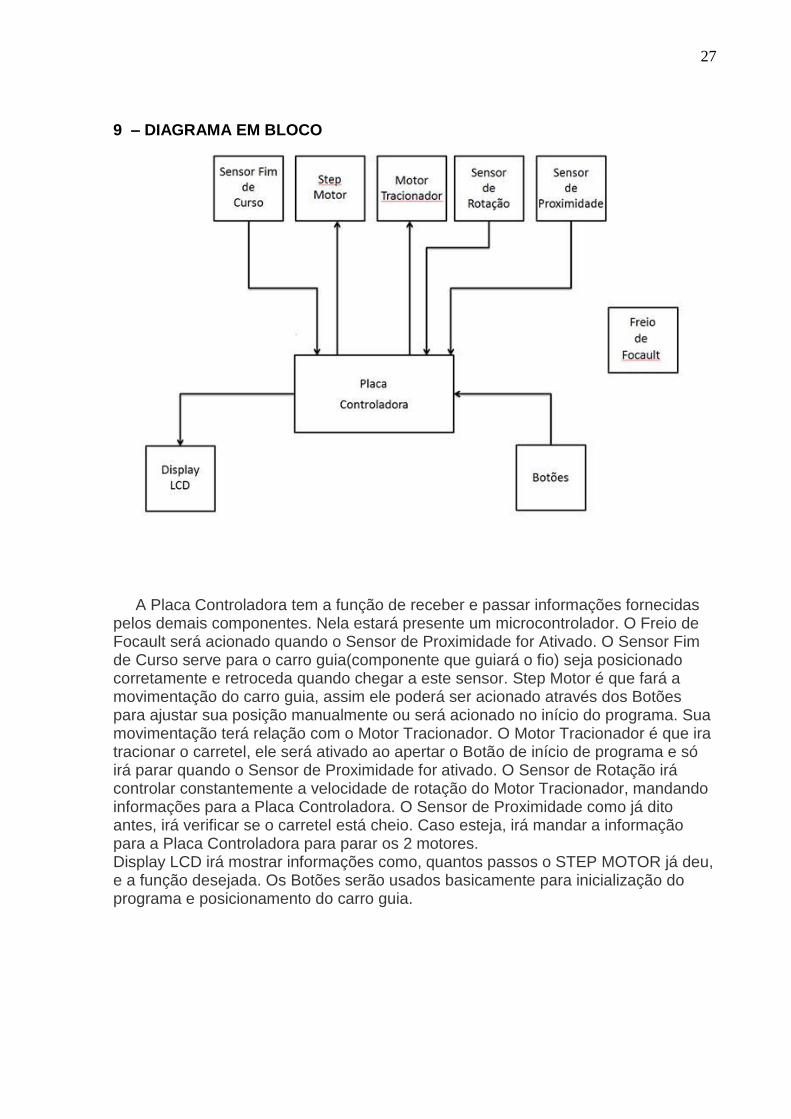
9 – DIAGRAMA EM BLOCO
A Placa Controladora tem a função de receber e passar informações fornecidas pelos demais componentes. Nela estará presente um microcontrolador. O Freio de Focault será acionado quando o Sensor de Proximidade for Ativado. O Sensor Fim de Curso serve para o carro guia(componente que guiará o fio) seja posicionado corretamente e retroceda quando chegar a este sensor. Step Motor é que fará a movimentação do carro guia, assim ele poderá ser acionado através dos Botões para ajustar sua posição manualmente ou será acionado no início do programa. Sua movimentação terá relação com o Motor Tracionador. O Motor Tracionador é que ira tracionar o carretel, ele será ativado ao apertar o Botão de início de programa e só irá parar quando o Sensor de Proximidade for ativado. O Sensor de Rotação irá controlar constantemente a velocidade de rotação do Motor Tracionador, mandando informações para a Placa Controladora. O Sensor de Proximidade como já dito antes, irá verificar se o carretel está cheio. Caso esteja, irá mandar a informação para a Placa Controladora para parar os 2 motores. Display LCD irá mostrar informações como, quantos passos o STEP MOTOR já deu, e a função desejada. Os Botões serão usados basicamente para inicialização do programa e posicionamento do carro guia.

28
10 – FLUXOGRAMA

29

30

31
Em paralelo ao fluxograma vem a interrupção:

32
O fluxograma apresentado acima é um fluxograma básico apenas para o
entendimento e explicação do que fazer para iniciar o funcionamento da máquina.
O primeiro passo é apertar o botão vermelho do painel que iniciará o
equipamento, e ao ser ligado o carro guia será levado até a posição zero da
máquina.
O próximo passo é marcar e salvar na máquina a posição inicial e a posição final
do carretel de acordo com o tamanho do carretel que será utilizado.
Depois disso basta apenas regular a velocidade em RPM do carretel e dar inicio
ao processo.
Quando o carretel estiver cheio o sensor de proximidade(indutivo) será acionado e
isso fará com que o processo seja interrompido imediatamente e seu carretel estará
pronto para o uso.

33
11 – PROGRAMAS 11.1 – Programa 1 = BEEP

34
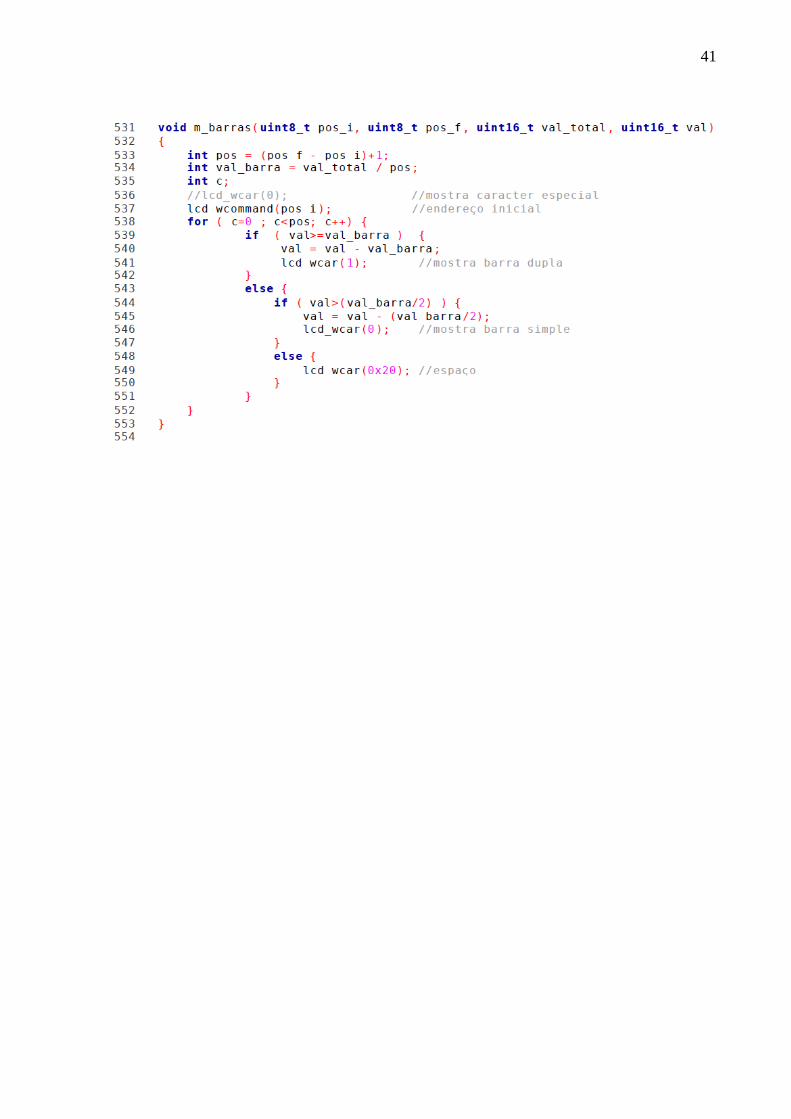
11.2 – Programa 2 = Inicializa LCD

35

36

37

38

39

40
41

42
11.3 – Programa 3 = Mensagens

43
11.4 – Programa 4 = Programa
Principal
44
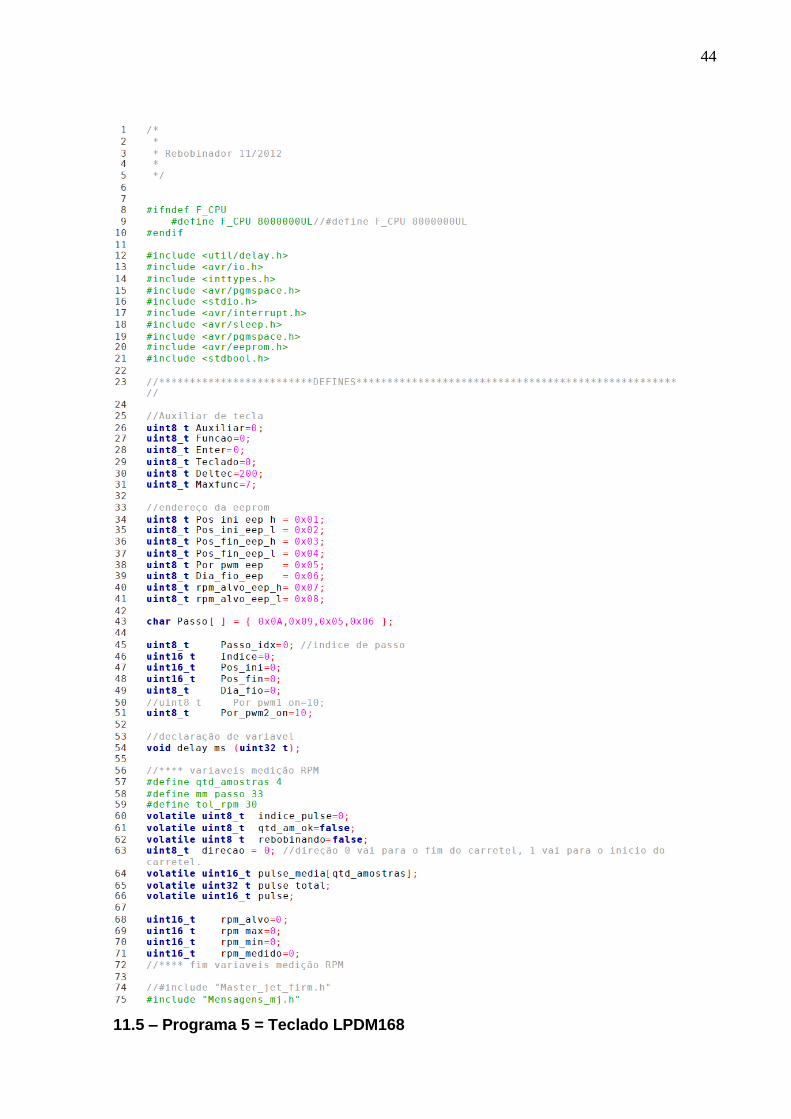
11.5 – Programa 5 = Teclado LPDM168

45

46

47
12 – TABELA DE CUSTOS

48
13 – CRONOGRAMA DE TAREFAS
Atividade Responsável Local Jun. Jul. Ago. Set. Out. Nov.
Desenhar
Escopo/Croqui
Manoel/Marcelo Laboratório de
informática e
sala de aula
Dimensionamento
da estrutura de
madeira
Leonardo A./
Leonardo
Nicolau
Empresa
SACCH
Definição da
parte mecânica
Vinicius/
Leonardo A.
Empresa
SACCH
Montagem parte
mecânica
Yuri/Fernando Empresa
SACCH
Dimensionamento
do circuito
elétrico
Cauan/Victor Empresa
SACCH
Montagem do
circuito elétrico
Yuri/Victor Empresa
SACCH
Apresentação Fernando/Victor Laboratórios/sala
de aula/casa
Pesquisa de
Materiais
Yuri/ Vinicius Empresa
SACCH/ casa
Banner Fernando/Victor Empresa
SACCH/ casa
Monografia Fernando/Victor/
Yuri/Vinicius/
Leonardo A.
Empresa
SACCH/ sala de
aula/ casa
Analise de falhas Manoel/ Marcelo/
Cauan/ Leonardo
Nicolau
Empresa
SACCH
Programação Leonardo
Nicolau/
Victor/Vinicius/
Yuri
Executado em tempo programado
Atraso na execução da tarefa

49
14 – FMEA

50
15– CONCLUSÃO
Ao concluir este Projeto, o grupo espera ter atingido os objetivos propostos no
início do ano e no início da realização do projeto. As ações empregadas para o
desenvolvimento deste projeto foram as mais diversas possíveis: conversar,
organizar, coordenar, pesquisar, comprar, escrever, digitar, telefonar, testar, pensar,
repensar, montar, remontar, apresentar, errar e acertar... Usamos também os
ensinamentos e a experiência dos professores, dos pais, dos colegas de grupo e
muitos outros. Enfim, o Trabalho chegou ao fim e o projeto torna-se um invento, que
poderá ser aproveitado por inúmeras empresas para melhorar seu desempenho e
seu lucro. Dentre os erros e os acertos, o projeto foi concluído, a monografia saiu e o
curso terminou.
Torcemos também para que muitas empresas necessitem do nosso projeto e
que nós possamos ganhar dinheiro com ele, assim teremos a certeza que nosso
trabalho realmente será útil.
Portanto, os inúmeros ensinamentos adquiridos através deste processo de
aprendizado seguirão, em parte, com integrantes da equipe, mas também estarão
registrados nesta monografia sob o título “Rebobinador de Fios”.





























