Embed Size (px)
DESCRIPTION
es una manual hacerca de la red de comunicacion que existe en los vehiculos y las diferentes redes que existe en los vehiculos.
Citation preview

Red de Cominicación en el Vehículo
Jefe de Taller
Booklet
Red de Cominucación en el Vehículo

M18044.15B
Jefe de taller
CopyrightMaterial desarrollado para General Motors de México. La reproducción de este material no esta permitida sin la autorización de General Motors de México.

Red de Cominicación en el Vehículo
Mayo 2009 i-1
PrefacioEste material de auto-estudio le será útil como un resúmen del ex-tenso programa de Capacitación para jefes de taller, sin embargo, no intenta sustituir a ninguno de los Manuales de Servicio e Instructivos de Uso de Herramienta que usted utiliza normalmente en su trabajo. El rango de especifi caciones y las variaciones en procedimientos de servicio entre los productos de las diferentes divisiones de General Motors, obligan a la consulta del Manual de Servicio correspondiente al vehículo y el año modelo en particular así como los instructivos de uso de cada herramienta o equipo de medición.
Toda la información contenida en este manual está basada en los últimos datos recibidos para la fecha de aprobación de este docu-mento.
General Motors se reserva el derecho de modifi car los manuales o los productos en cualquier momento y sin previo aviso. Ni este manual ni cualquiera de sus partes pueden ser reproducidos sin la autorización previa y por escrito de General Motors de México, S.de R. L de C.V.
Intr
oduc
ción
i

M18044.15B
Jefe de taller
La Estrategia Básica de Diagnóstico (EBD)El objetivo de la Estrategia Básica de Diagnóstico es proporcionarle una guía para que usted cree y siga un plan de acción especifi co para cada situación de diagnóstico. Siguiendo un plan similar para cada situación de diagnóstico, usted logrará una máxima efi ciencia cuando diagnostique y repare vehículos. Si bien cada uno de los pasos de la Estrategia Básica de Diagnóstico está numerado, algunos problemas no requerirán que usted realice alguno o algunos de ellos, lo cual no impedirá que diagnostique con éxito la queja del cliente. El primer paso de su proceso de diagnóstico siempre deberá ser Comprobar la existencia de la Queja del Cliente y el paso fi nal de su proceso de diagnóstico siempre deberá ser Verifi car la Reparación de la Falla. Refi érase a la siguiente carta para analizar los pasos de la Estrategia Básica de Diagnóstico.
i-2

Red de Cominicación en el Vehículo
Ejemplo de diagnóstico usando la EBD
Siempre que un cliente presente un vehículo en el que sea probable la necesidad de diagnosticar usando un manómetro, antes de realizar cualquier medición con el mismo, debemos seguir los pasos de la EBD:
Comprenda y verifi que la condición del cliente1. : La primera parte de este paso es obtener la mayor información posible del cliente. ¿Hay accesorios de postventa instalados en el vehículo? ¿Cuándo ocurre la condición? ¿Dónde ocurre la condición? ¿Cuánto tiempo dura la condición? ¿Con qué frecuencia ocurre la condición? Para verifi car la queja, el técnico debe estar familiarizado con la operación normal del sistema y consultar el manual de propietario o el manual de servicio para cualquier información que necesite, como las presiones normales a las que opera el sistema. Funcionamiento del vehículo según el diseño2. : Esta condición existe cuando el vehículo se encuentra funcionando normalmente. La condición descrita por el cliente puede ser normal. Compare con otro vehículo similar que funcione normalmente bajo las mismas condiciones descritas por el cliente. Explique sus hallazgos y el funcionamiento del sistema al cliente. Si el cliente no está satisfecho presente un Informe de producto de campo. Verifi caciones preliminare3. s: Realice una inspección visual completa. Repase el historial de reparaciones. Detecte sonidos u olores inusuales. Recolecte información del DTC para encontrar la reparación efectiva. Realice la verifi cación del sistema de diagnóstico publicada4. : Esto llevará al técnico a un método organizado de diagnóstico e identifi car qué categoría de diagnóstico deberá realizar. Revise si hay boletines, cambios al vehículo e información preliminar (PI) relacionada.5. Categorías de diagnóstico: 6. 6.1. DTC actual: Siga el diagnóstico del DTC designado a fi n de realizar una reparación efectiva. 6.2. Síntoma - Sin DTC: Seleccione el diagnóstico de síntoma apropiado. Siga los pasos o sugerencias de diagnóstico para completar la reparación. 6.3. Diagnósticos no publicados: Analice la condición. Desarrolle un plan para el diagnóstico. El esquema del manual de servicio le ayudará a ver los circuitos de salida, entrada, tierra y energía del sistema. También puede identifi car los empalmes y otras áreas en donde se juntan varios circuitos. Busque las ubicaciones de componentes para ver si los componentes, conectores o arneses están expuestos a temperatura extrema, humedad o corrosivos (sal del camino, ácido de batería u otros líquidos). Utilice los diagramas de cableado, la descripción y funcionamiento del sistema y la descripción del circuito del sistema. 6.4. DTC de historial/no continuo: Una condición no continua es una que no ocurre continuamente, puede ser difícil duplicar y únicamente ocurrirá cuando se cumplan determinadas condiciones. Generalmente, una condición no continua es ocasionada por cableado o conexiones eléctricas con falla, componentes con mal funcionamiento, interferencia de radiofrecuencia/electromagnética,
Mayo 2009i-3
M18044.15B
Jefe de taller
condiciones de conducción o equipo de mercado secundario. Los siguientes métodos/herramientas pueden proporcionar un benefi cio para la localización y reparación de un DTC con condición nocontinua o de historial. • Combinando el conocimiento de los técnicos con la información de servicio disponible. • Evalúe los síntomas y condiciones descritas por el cliente en Hojas verifi cación problema cliente . • Siga las sugerencias en Verifi car condiciones no continuas y conexiones defi cientes . • Utilice la herramienta de exploración disponible, el multímetro digital o J 42598 con capacidad de captura de datos. Aisle el origen del problema, luego repare y verifi que la reparación:1. Después de aislar la causa, haga las reparaciones y valide el funcionamiento correcto realizando Verifi cación de reparación de diagnóstico . La verifi cación de que se haya corregido el DTC o el síntoma puede involucrar la prueba en carretera del vehículo. Vuelva a examinar la condición2. : Si un técnico no puede encontrar o aislar el problema, será necesaria una reevaluación. Vuelva a verifi car la condición. La condición será una condición normal o no continua.
Mayo 2009 i-4
Red de Cominicación en el Vehículo
Objetivo General
Requisitos
• TBD
Duración
• 8 Hrs. 1 Día
Analizar los diferentes protocolos de comunicación y confi guraciones de conexión diagnosticando con herramientas electrónicas
Mayo 2009i-5

M18044.15B
Jefe de taller
CopyrightMaterial desarrollado para General Motors de México. La reproducción de este material no esta permitida sin la autorización de General Motors de México.
Mayo 2009 i-6

Red de Cominicación en el Vehículo
Índice
REDES DE COMUNICACIÓN
I. Módulos de ControlII. Protocolos de ComunicaciónIII. Confi guración de Conexiones
Mayo 2009i-7

M18044.15B
Jefe de taller
Mayo 2009

Red de Cominicación en el Vehículo
Mayo 20091-1
ObjetivoAl fi nalizar el curso el alumno será capaz de:
• Realizar un servicio con programación usando un procedimiento de calibración • Realizar un servicio con reajuste usando un procedimiento de ajuste • Diagnosticar con comando de salidas usando la EBD • Probar con comando de salidas usando el procedimiento • Diagnosticar con PMM usando la EBD • Probar con PMM usando el procedimiento
Mód
ulos
de
Con
trol
Mód
ulo
1

M18044.15B
Jefe de tallerBooklet
Mayo 2009 1-2
1. IntroducciónActualmente los vehículos usan varios módulos para controlar los diferentes sistemas, con el fi n de mejorar la economía de combustible, reducir la emisión de gases contaminantes, incrementar la seguridad, comodidad y desempeño.Al integrar la tecnología al auto, se incremento el número de componentes electrónicos, así como el alambrado, lo que le dio mayor peso al vehículo.Para reducir la cantidad de alambrado y peso vehicular, se implementa la Red de Comunicación en el vehículo.

Red de Cominicación en el Vehículo
Señales
Las señales son impulsos eléctricos o electrónicos que viajan por el cableado de los módulos de con-trol del vehículo para comunicarse entre ellos. Estas señales son análogas y digitales que se utilizan como señales de entrada o salida para llevar y entregar la información necesaria para la operación del vehículo en cualquier requerimiento del conductor. Sin embargo, las señales en la RED están expuestas a alteraciones, desvios o perdida por fuentes externas.
Interferencia Electromagnética
En el vehículo existen fuentes que generan campos magnéticos en forma de ondas de alta frecuencia que al aproximarse a un componente electrónico o cableado, se superponen a la señal útil, modifi cando o eliminando dicha señal. Algunos componentes y circuitos eléctricos son sensibles a la interferencia electromagnética (EMI) o a otros tipos de ruido eléctrico.
• Un arnés enrutado incorrectamente que está demasiado cerca a los dispositivos de corriente alta y/o voltaje alto como los componentes de ignición secundaria, motores, generador etc., podrían inducir un ruido eléctrico en un circuito que puede interferir con el funcionamiento normal del circuito.
• Una interferencia del sistema eléctrico ocasionada por un relevador con mal funcionamiento o un solenoide impulsado por el módulo de control o interruptor, pueden ocasionar un cambio eléctrico brusco. Generalmente, el problema ocurrirá cuando el componente en mal estado está funcionando.
• La instalación incorrecta de accesorios adicionales del mercado secundario o que no son de fábrica como luces, radios de 2-vías, amplifi cadores, motores eléctricos, arranques a control remoto, sistemas de alarma, teléfonos celulares, etc., podrían ocasionar una interferencia mientras están en uso.
Introducción
Mayo 20091-3

M18044.15B
Jefe de taller
• Señales de entrada, analógica
Se caracterizan por ser variables continuamente, puede ser cualquier voltaje dentro de un rango determinado. Tiene forma ondulada, son enviadas por los sensores al módulo de control. A estas señales también se les llama de entrada discreta, sirven al módulo para procesar la información que proporcionan para ejecutar una acción de salida.
Entradas análogas y digitales de los sensores
Salidas análogas y digitales a los actuadores
Entradas digitales de red de comunicación
Salidas digitales de red de comunicación
Mayo 2009 1-4
• Señales de entrada, digitales
Su forma es cuadrada y sólo cuenta con dos valores 0 y 1, apagado o encendido, respectivamente.Son generadas por interruptores que informan al módulo sobre una acción de demanda de operación. Hay otras señales digitales de entrada que sirven para que los módulos estén en comunicación a través de la red, al recibir los mensajes que se generen.
MAF
TPSPCM
INTERRUPTOR
EBCMPCM

Red de Cominicación en el Vehículo
Comunicación
La comunicación entre los módulos de control es realizada principalmente a través de los circuitos de datos seriales de alta y baja velocidad GMLAN. Los módulos que necesitan comunicación en tiempo real se conectan a la red GMLAN de velocidad alta. El módulo de control de la carrocería (BCM) es la compuerta de datos seriales entre las redes. El propósito de la compuerta es convertir los mensajes de datos seriales entre el bus de velocidad alta GMLAN y el bus de velocidad baja GMLAN. La red de área de controlador (CAN) es otra red de comunicación de datos seriales utilizada en este vehículo dedicada al subsistema del módulo de control electrónico del freno (EBCM) para estabilización.
GMLAN de baja velocidad
Es una red usada comúnmente para funciones que son controladas por el conductor y los requerimientos de tiempo de respuesta del sistema están en el orden de 100 a 200 ms. Usa el protocolo de comunicación CAN de un cable. Su velocidad de transmisión en el modo normal es de 33.33 kb/s y en el modo de programación es de 83.33 kb/s.
GMLAN de mediana velocidad
Es una red usada en sistemas de información y entretenimiento (infotainment) donde el tiempo de respuesta del sistema demanda que una gran cantidad de información sea transmitida en un periodo de tiempo relativamente corto. Sistemas de navegación, reproductores de DVD’s, radios y otros sistemas de entretenimiento muy sofi sticados. Usa el protocolo de comunicación CAN de doble cable. Su velocidad de transmisión nominal es de aproximadamente 92.5 kb/s
Mayo 20091-5
• Señal de salida, analógica
Una ves procesada la información de entrada, la acción de salida a ejecutarse es una señal análoga hacia un actuador del sistema. Sirve para regular la apertura o cierre del solenoide para el control de la presión.
SOLENOIDEPCM
• Señales de salida, digitales
Su forma es cuadrada y sólo cuenta con dos valores 0 y 1, apagado o encendido, respectivamente.Las señales digitales de salida sirven para modular la apertura o cierre de un actuador como el inyector. Otras señales digitales de salida son los mensajes que se generan en los módulos y que son enviados a través de la red de comunicación.
INYECTOR
BCM
PCM

M18044.15B
Jefe de tallerBooklet
Mayo 2009 1-6
GMLAN de alta velocidad
Es una red usada en los sistemas que intervienen en la seguridad del vehículo y de el conductor, los datos seriales se transmiten en dos cables trenzados que permiten una velocidad hasta de 500 Kb/s. El cable par trenzado termina con dos resistencias de 120 ohmios, una es interna al módulo de control del motor (ECM) y el otro está después del BCM en el módulo de AWD o un ensamble del conector de resistencia separado. Las resistencias se utilizan para reducir el ruido en el bus GMLAN de velocidad alta durante el funcionamiento normal del vehículo. El GMLAN de velocidad alta es un bus diferencial. El bus de datos seriales GMLAN de velocidad alta (+) y los datos seriales GMLAN de velocidad alta (-) son dirigidos a extremos opuestos de un nivel de descanso o inactivo.
Importante: Un DTC de pérdida de datos seriales no representa una falla del módulo en que el código está establecido.
GMLAN de Alta Velocidad
GMLAN de Baja Velocidad

Red de Cominicación en el Vehículo
Mayo 20091-7
Módulos de Control
Conector de enlace de datos (DLC)
Es el conector de enlace de datos (DLC) es un conector de 16 cavidades estandarizado. El estándar de industria ordena el diseño y la ubicación del conector y es necesario que proporcione lo siguiente:
• Terminal 1 GMLAN de baja velocidad • Terminal 2 GMLAN de baja velocidad • Terminal 3 bus (+) de expansión de datos seriales GMLAN alta velocidad • Terminal 4 tierra de potencia de el Tech 2 • Terminal 5 tierra de señal común • Terminal 6 bus (+) de datos seriales GMLAN de alta velocidad • Terminal 7 señal de datos seriales * • Terminal 8 señal de datos seriales * • Terminal 9 • Terminal 10 • Terminal 11 bus (-) de expansión de datos seriales GMLAN de alta velocidad • Terminal 12 señal de datos seriales * • Terminal 13 señal de datos seriales * • Terminal 14 bus (-) de datos seriales GMLAN de alta velocidad • Terminal 15 • Terminal 16 voltaje positivo de batería, energía para el Tech 2
* Usado en algunos vehículos GM para diagnóstico.

M18044.15B
Jefe de taller
Aveo
Las terminales para comunicarse con el módulo de control del motor (ECM), módulo de control electrónico de frenos (EBCM), módulo SIR, módulo inmovilizador y módulo del sistema antirrobo están ubicados en:
• terminal 7 (datos seriales del ECM, TCM, EBCM, Inmovilizador) • terminal 8 (datos seriales sistema antirrobo) • terminal 12 (datos seriales ABS) • terminal 13 (datos seriales SIR
Optra México
• terminal 7 ECM, TCM • terminal 3 dirección hidráulica variable según velocidad • terminal 12 EBCM • terminal 13 datos seriales SIR
El Tech 2 se conecta al DLC para comunicarse con cada módulo que se puede incluir como una opción dentro del vehículo. Si un módulo no está instalado en el vehículo, el Tech 2 visualizará No Comm (sin comunicación) para el módulo de control no localizado. Para evitar malos diagnósticos de no comunicación con un módulo específi co, consulte Referencias de vínculo de datos para obtener una lista de módulos, los buses con los que estos se comunican y los códigos RPO de un módulo específi co.
Otras utilidades que tiene el conector DLC son para diagnosticar el vehículo al que se conecto el Tech 2, hacer programaciones y aprendizajes según se haya reparado o lo indique el manual de servicio.
1 8
9 16

Red de Cominicación en el Vehículo
2. Módulo de ControlEstos componentes electrónicos son los encargados de transformar los fenómenos físicos, mecánicos y las acciones del conductor en señales eléctricas. Es decir, recibe la información de los sensores, procesa los datos recibidos haciendo los calculos necesarios y emite una respuesta en forma de señal o pulso eléctrico, controlando a los actuadores. A los Módulos de Control se les conoce comúnmente como ECM, PCM, VCM, etc.
2.2. Los periféricos
El módulo de control, es un componente capaz de hacer cálculos, pero es incapaz de hacerlo todo por sí mismo. Necesita de algunos componentes adicionales, llamados Periféricos.
• ROM – Read Only Memory (Memoria sólo de lectura)Dentro de esta memoria está guardado, de manera permanente, el programa que el módulo de control debe ejecutar, sigue las instrucciones del programa que le indica de qué manera debe controlar, por ejemplo, una operación en el sistema ABS, en el sistema de inyección electrónica, etc. Como su nombre lo dice, es sólo de lectura, no se puede modifi car ningún valor del programa.
> PROM (Programable una vez).
> EPROM (Borrable usando luz UV).
> EEPROM(Borrable electrónicamente, por byte).
> Flash EPROM (Borrado Total electrónicamente).
• RAM – Random Access Memory (Memoria de acceso aleatorio)A diferencia de la memoria ROM, la cual sólo puede ser leída, la memoria RAM permite lectura y escritura. Es usada por la computadora para almacenar datos temporalmente y usarlos posteriormente.
Una memoria RAM pierde todo su contenido en cuanto se corta el suministro de energía.
Existe un tipo especial de RAM llamadas “Permanentes”, las cuales poseen una pequeña batería que les permite mantener la información a pesar de que no haya más suministro de energía.
En los módulos para automóviles, las memorias que contienen los “códigos de falla” son alimentadas directamente de batería. Pueden mantener la información aunque el interruptor de encendido esté en OFF, pero se borran si la batería se desconecta.
• CAD – Convertidores Análogo DigitalesConsiderando que el ECM sólo entiende informaciones digitales (0 ó 1), es necesaria la presencia de este dispositivo para “traducir” las señales análogas.Gracias a este dispositivo, el ECM puede recibir las señales de los sensores no digitales.

M18044.15B
Jefe de taller
• El Contador (TIMER):Este es un periférico que se encarga del conteo de tiempos. Puede cronometrar acciones, generar temporizaciones y hacer conteos.
• PWM – Pulse Width Modulator (Modulador de ancho de pulso)El Modulador de Ancho de pulso está dedicado a la conversión de impulsos o frecuencias.Por ejemplo, el sensor de RPM del motor, producirá una señal digital representativa de las RPM del motor que pueda comprender el ECM.
SENSOR
INTERRUPTOR
CAD
PROCESADOR
ENTRADAS AL BCM
ANÁLOGA
DIGITALES
DIGITAL
MÓDULO DE
CONTROL
• CAD – Convertidores Análogo DigitalesConsiderando que el ECM sólo entiende informaciones digitales (0 ó 1), es necesaria la presencia de este dispositivo para “traducir” las señales análogas.Gracias a este dispositivo, el ECM puede recibir las señales de los sensores no digitales.
ACTUADORCDA
PROCESADOR
SALIDAS DEL BCM
ANÁLOGA
DIGITALES
DIGITAL
MÓDULO DE
CONTROL
ACTUADOR
• CDA – Convertidores Digital AnálogoRealizan la función opuesta al CAD, transformando una señal digital en una señal análoga.De esta manera, el resultado digital de un cálculo del ECM puede servir para comandar un actuador no digital.
Mayo 2009 1-8

Red de Cominicación en el Vehículo
Mayo 20091-9
2.3. Módulo Maestro de Energía (PMM)
¿Qué es el PMM?
El PMM es un sistema que permite que los módulos de control del vehículo inicien o concluyan su operación, es decir, que estén activos (encendidos) o inactivos (apagados). La energía para muchos de los circuitos de estos vehículos está controlada por el BCM, módulo que está diseñado para ser el maestro del modo de energía (PMM).
¿Para que sirve en el vehículo?
El BCM junto con el interruptor de ignición controlan la energía de la red de comunicación. El PMM determina cuál es el modo de energía (solicitud de apagado, accesorios, funcionamiento, marcha) que se requiere y reporta esta información a los otros módulos a través de los datos seriales. Los módulos que tienen entradas de voltaje conmutadas pueden funcionar en un modo predeterminado si el mensaje de datos seriales del PMM no coincide con lo que el módulo individual puede ver de sus propias conexiones.
El BCM envía el mensaje del estado del interruptor de ignición o Modo de Energía a todos los módulos conectados a la red. Con este mensaje se activan o desactivan los módulos con el fi n de ahorrar energía.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 1-10
Parámetros del modo de energía
del PMMPosición del
interruptor de la ignición
Modo de energía transmitido
enc. Off/Run/Crank (apagado/
en marcha/arranque)
(Circuito de voltaje 1 de ignición de
funcionamiento y marcha)
Funcionamiento/accesorios de la ignición
(Circuito de voltaje de
accesorios)
En funcionamiento/arranque ignición(Circuito de voltaje
de ignición 1)
Llave en apagado fuera
apagado Key Out/ACC (Llave fuera/acce-sorio)
INACTIVO INACTIVO
Llave colocada en apagado
apagado Key In/Off (Llave colocada/apaga-do)
INACTIVO INACTIVO
ACCESSORY (accesorios)
ACCESSORY (accesorios)
Llave afuera/ACC ACTIVO INACTIVO
EN FUNCIONA-MIENTO
EN FUNCIO-NAMIENTO
EN FUNCIONA-MIENTO
ACTIVO ACTIVO
ARRANQUE Solicitud de arranque
ARRANQUE INACTIVO ACTIVO
Tabla de ignición.
¿Qué es?
Es la tabla que indica las diferentes posiciones del interruptor de encendido en modo de energía para identifi car los circuitos que están activados o desactivados.
En la siguiente tabla se muestran las señales que recibe el PMM del interruptor de ignición para identifi car el modo de energía deseado por el conductor, en correspondencia a la posición del interruptor de ignición.

Red de Cominicación en el Vehículo
Mayo 20091-11
Módulos de Control
INT.IGN.ON
DDM
EBCM
SDM
PCM
BCM
TCM
HVACRADIO
DLC
Modo de energía controlado por relevador
Es un modo de energía en el que el BCM utiliza las entradas del interruptor de ignición discretas Voltaje 1 de ignición de funcionamiento/arranque, voltaje de accesorios y voltaje de ignición 1, para distinguir el modo de energía correcto.
Le sirve al BCM, para determinar el modo de energía deseado, activando los relevadores apropiados.
Relevador RUN/CRANK (funcionamiento/arranque)
El circuito de control del relevador Run/Crank está conectado a una tierra constante y es conmutado por el circuito de ignición 1 o el BCM. El BCM, en lugar del interruptor de ignición, activará el relevador Run/Crank durante un evento de arranque remoto. El relevador Run/Crank suministra una señal de energía a los siguientes circuitos, cuando se selecciona el modo de energía Run (funcionamiento) o Crank (arranque):
• Indicador de cambio de la transmisión automática • Transmisión automática (A/T) • La potencia conmutada alimenta al BCM • Módulo de control del freno electrónico (EBCM) • Módulo de ignición electrónica (control de chispa) • Módulo de dirección hidráulica electrónica (EPS) • Inyectores de combustible • Módulo de control del tren de potencia (PCM) • Interruptor de posición neutro de estacionamiento (PNP)

M18044.15B
Jefe de tallerBooklet
Mayo 2009 1-12

Red de Cominicación en el VehículoMódulos de Control
Mayo 20091-13
Descripción y funcionamiento de la energía retenida para accesorios (RAP)
¿Qué es el RAP?
Es un modo de energía en el qué los módulos reciben el mensaje de modo de energía del (BCM) a través de los circuitos de datos seriales, indicando cuando es actual el modo de energía retenida para la alimentación de los accesorios.
¿Para qué sirve?
Cuando el RAP es activado cada uno de los módulos conectados a la red, cuentan con energía para sus respectivos componentes. Dependiendo del vehículo, el RAP opera una determinada cantidad de tiempo dependiendo del Software del módulo y de condiciones en el interruptor de encendido y en el vehículo, para que se active o desactive.
¿Cuando se activa y desactiva?
• El BCM supervisa la posición del interruptor de encendido, el estado de la batería y el estado de la puertas del compartimiento de pasajeros para determinar si se debe iniciar la RAP. Los módulos luego apoyan el funcionamiento de los sistemas bajo su control según lo requiere el funcionamiento en modo de energía RAP. Los componentes y sistemas que están activos en RAP también se activan en cualquier momento en que el interruptor de encendido esté en cualquier posición que no sea APAGADO.
• El BCM envía un mensaje de datos seriales de modo de energía para fi nalizar la función RAP cuando se cumple alguna de las siguientes condiciones: • El BCM recibe una entrada indicando la abertura de cualquier puerta del compartimiento del pasajero después que la llave de ignición está fuera de la ignición. Importante: La única puerta que apagará el radio durante RAP es la puerta del conductor. Esta es una función del radio y todavía se apagará después del límite de tiempo. • El temporizador interno del BCM para el RAP expira después de aproximadamente 10 minutos. • El BCM detecta un decaimiento en la capacidad de la batería menor que el limite indicado.
RAP es controlado con 2 métodos distintos, datos seriales y control del relevador. Algunos módulos reciben un mensaje RAP del módulo de control de la carrocería (BCM) por medio de circuitos de datos seriales.

M18044.15B
Jefe de taller
RAP controlado por relevadores
El BCM mantiene energizado el relevador de RAP durante todos los modos de potencia, excepto Apagado- Activar y Arrancar. El relevador también es energizado durante aproximadamente 10 minutos después de apagar la ignición y al retirar la llave, considerando que la puerta esté abierta.RAP controlado por relevadores se desactivará cuando ocurra una de las siguientes condiciones:
• El BCM recibe una entrada de cualquier interruptor de puerta entreabierta o puerta abierta indicando que cualquier puerta se abrió después de que la llave de ignición se sacó de la ignición. Importante: Si BCM recibe cualquier señal de puerta entreabierta o puerta abierta de esos interruptores cuando la llave de ignición está apagada, RAP no iniciará. • El temporizador interno del BCM para el RAP expira después de aproximadamente 10 minu-tos. • El BCM detecta un decaimiento en la capacidad de la batería menor que el limite indicado.Los sistemas energizados por medio del relevador de accesorios durante el modo de alimentación de accesorios retenida (RAP) son los siguientes: • Ventanas Eléctricas • Quemacocos
RAP controlado por datos seriales
Los sistemas RAP controlados por datos seriales son los siguientes: RadioActivación/desactivación de radio RAP funciona igual que el funcionamiento del relevador con una excepción; el único interruptor de puerta que apagará el radio durante RAP es el interruptor para abrir la puerta del conductor.
Booklet
Mayo 2009 1-14

Red de Cominicación en el Vehículo
Estados del Módulo
Off-asleep (Apagado-desactivado)
Es un estado del módulo de control en el que ha detenido su monitoreo de control activo de todas las funciones del sistema, por lo tanto está inactivo.
Todos lo módulos de control monitorean algunas entradas todo el tiempo, el estado desactivado aplica cuando se cumplen las siguientes condiciones:
• No hay actividad en la línea de datos seriados• No hay salidas comandadas por parte del módulo• No hay contadores de retención activados (timers)• No hay presencia de entradas para iniciar su operación
El BCM entrará en un estado de inactividad cuando todas las condiciones siguientes estén presen-tes: • El interruptor de encendido está apagado. • No hay actividad en la línea de datos seriales. • No se programaron salidas. • No hay temporizadores de retardo activos. • No hay entradas de reactivación.
On-asleep (Encendido-desactivado)
Este estado ocurre cuando las condiciones para iniciar su operación se han encontrado y el control y monitoreo se han iniciado. El módulo se encuentra tomando ejemplos y esperando instrucciones en la línea de datos seriados.
On-awake (Encendido-activado)
Es la operación normal de los módulos de control, para estar en este estado el módulo de control detecta ciertas entradas. Estas son monitoreadas durante el estado desactivado, en el cual los módulos de control pueden cambiar entre un estado y otro.
El BCM ingresará a un estado de activación, si se detecta alguna de las siguientes entradas de activación: • Actividad en la línea de datos seriales • Detección de una condición de desconexión y reconexión de la batería • Los faros están encendidos. • La ignición está encendida. • Interruptor de llave en la ignición • Las luces de estacionamiento están encendidas. • Mensaje RFA
Módulos de Control
Mayo 20091-15

M18044.15B
Jefe de taller
Modo de protección
Operación a prueba de fallas
Debido a que el funcionamiento de los sistemas del vehículo depende el modo de energía, existe un plan a prueba de fallos en caso que el modo maestro de energía (PMM) falle en enviar un mensaje de modo de energía. El plan a prueba de fallos cubre esos módulos utilizando exclusivamente los datos seriales del modo de control de energía, así como esos módulos con entradas discretas de señal de ignición.
Mensajes de datos seriales
Los módulos que dependen exclusivamente de los mensajes de datos seriales de modos de energía, permanece en el estado mandado por el último mensaje PMM válido hasta que puedan revisar el estado del indicador de funcionamiento del motor en los circuitos de datos seriales. Si el PMM falla, los módulos supervisan el circuito de datos seriales del indicador de funcionamiento del motor. Si el dato serial del indicador de funcionamiento del motor es Verdadero, lo que indica que el motor está funcionando, los módulos a prueba de falla se activarán. En este estado, los módulos y sus subsistemas pueden apoyar todos los requerimientos del operador. Si el dato serial del indicador de funcionamiento del motor es Falso, lo que indica que el motor no está funcionando, los módulos a prueba de falla OFF-AWAKE activará la desconexión. En este estado, los módulos están constantemente revisando si hay un mensaje de cambio de estado en los circuitos de datos seriales y pueden responder a entradas locales y a entradas de datos seriales de otros módulos en el vehículo.
Señales de ignición discreta
Los módulos que tienen entradas de señal de ignición discretas también permanecen en el estado mandado por el último mensaje PMM válido que se recibió en los circuitos de datos seriales. Puede entonces verifi car el estado de sus entradas discretas de ignición para determinar el estado válido actual. Si la entrada de la ignición discreta está activa, voltaje positivo de batería, los módulos serán infalibles en el modo RUN (funcionamiento). Si la entrada de la ignición discreta no está activa, abierta o 0 voltios, los módulos se activarán de apagado a prueba de fallos. En este estado, los módulos están constantemente revisando si hay un mensaje de cambio de estado en los circuitos de datos seriales y pueden responder a entradas locales y a entradas de datos seriales de otros módulos en el vehículo.
Booklet
Mayo 2009 1-16

Red de Cominicación en el Vehículo
Programación
Sistema de Programación de Servicio (SPS)
¿Qué es?
El sistema de programación de servicio (SPS) es el medio por el cual se actualizan los archivos de calibración “fl ash” que están almacenados en los módulos de control de abordo del vehículo ( PCM, ABS,TCM). El archivo de calibración está hecho a la medida para cada módulo de vehículo. El archivo de calibración contiene información para aplicaciones y controles específi cos para temas tales como curvas de encendido y control de combustible.
¿Para qué sirve?
Para reestablecer los valores y parámetros de operación de los módulos y así corregir alguna condición de falla relacionada con la queja del cliente.Para poner en un módulo nuevo los valores y parámetros de operación correspondientes al vehículo.
¿Cuando se debe hacer una programación?
• En un reemplazo del motor• En un reemplazo de un módulo de control• En un reemplazo del balanceador dinámico del cigüeñal (damper)• En un reemplazo del cigüeñal• En un reemplazo del sensor CKP• En cualquier reparación del motor que dañe la relación cigüeñal a sensor CKP.• En el cambio del cuerpo de mariposa es necesario hacer el aprendizaje de ralenti• En un reacondicionamiento/servicio en un sistema del vehículo• En cualquier servicio de corrección en el que se cambien componentes que emitan o reciban una señal crítica para el sistema.
Precauciones: • NO programe un módulo de control a menos que así se lo indique un procedimiento de servicio o así lo indica un boletín de servicio de General Motors Corporation. La programación de un módulo de control bajo cualquier otra circunstancia no corregirá en forma permanente la queja de un cliente. • Es esencial que Tech 2, MDI y la terminal TIS estén equipados con el software más reciente antes de realizar programación de servicio. • Debido a los requisitos de tiempo para la programación de un módulo, se recomienda que se utilice una fuente de energía externa para mantener el voltaje del sistema. El voltaje estable de la batería es muy importante durante la programación. Cualquier fl uctuación, picos, sobrevoltaje o pérdida de voltaje, interrumpirá la programación. Para garantizar una programación sin problemas, GM recomienda utilizar una de las siguientes fuentes de energía externas:
Módulos de Control
Mayo 20091-17
M18044.15B
Jefe de taller
- Un cargador Midtronics PSC - Un puente de 12V completamente cargado o paquete de reforzador desconectado del suministro de voltaje AC • Algunos módulos requerirán programación/confi guración adicional de eventos realizados antes o después de la programación. • Algunos vehículos podrían necesitar utilizar un módulo CANDi o MDI para su programación. • Revise la información de servicios adecuada para estos procedimientos. • Los DTC pueden estar establecidos durante la programación. Borre los DTC después de que la programación esté completa. • Borrar los DTC del tren motriz se establecerán los indicadores de estado del sistema de inspección/mantenimiento (I/M) a NO.
Confi guración.
La confi guración de un módulo de control esta orientada a realizar programaciones complementarias en los componentes del sistema en servicio, para que operen dentro de los parámetros programados para el optimo desempeño del vehículo. Estas confi guraciones se llaman aprendizajes .
Aprendizaje
¿Qué es?
Es un modo de establecer y fi jar el parámetro de operación de un componente del sistema relacionado, para que este sincronizado con la operación programada del módulo.
¿Para que sirve?
Para que el vehículo no presente problemas de desempeño durante la conducción, arranque, control remoto, etc.
¿Cuando se hace el aprendizaje?
• En un reemplazo del motor• En un reemplazo de un módulo de control• En un reemplazo del balanceador dinámico del cigüeñal (damper)• En un reemplazo del cigüeñal• En un reemplazo del sensor CKP• En cualquier reparación del motor que dañe la relación cigüeñal a sensor CKP.• En el cambio del cuerpo de mariposa es necesario hacer el aprendizaje de ralenti• En un reacondicionamiento/servicio en un sistema del vehículo• En cualquier servicio de corrección en el que se cambien componentes que emitan o reciban una señal crítica para el sistema.
Precaución:Siga y cumpla todas las indicaciones que aparecen en el manual de servicio, consulte las “ligas” resaltadas en color azul del manual de servicio para comprender la relación y fallas que se pueden presentar al no completar el procedimiento de programación y aprendizaje.
Booklet
Mayo 2009 1-18

Red de Cominicación en el Vehículo
Es necesario consultar todas las tablas que indique el procedimiento del manual de servicio, debido a que son una excelente ayuda en el servicio, diagnóstico y comprobación de los sistemas del vehículo.
Uso del Tech 2
Si bien el Tech 2 es un equipo muy potente, de ninguna manera puede suplantar los conocimientos y la experiencia del técnico. Se recomienda que a la hora de diagnosticar un vehículo, el técnico consulte el manual de servicio al igual que los últimos boletines de servicio.
El Tech 2 puede alimentarse con:• El cable de alimentación de la batería del vehículo• El cable de alimentación del encendedor de cigarrillos• El bloque de alimentación del Tech 2• La conexión DLC (Data Link Connector - conector de enlace para transmisión de datos) en la mayoría de los vehículos.
Precaución:
• El empleo de una versión obsoleta podría dañar los módulos de los vehículos. El Tech 2 debe estar equipado con la última versión del software disponible.
• Asegúrese de que la batería del vehículo está completamente cargada. El voltaje de la batería para realizar SPS deberá estar entre 12 y 14 voltios. Asegúrese que el cargador de baterías esté conectado al vehículo mientras se utiliza la herramienta Tech 2 principalmente para programación.• Asegúrese de que las conexiones del cable son seguras. Un cable desconectado puede causar un fallo en el módulo.• Si se utiliza una PC para la programación mediante transferencia de datos, asegúrese de que la alimentación esté conectada correctamente, ya que si se utiliza una fuente de alimentación de CA y se desconecta el cable de alimentación, se podría interrumpir la programación y provocar daños al módulo de control. Si es una PC portátil qué está usando su propia fuente de energía (batería), asegúrese de que la carga de dicha fuente de alimentación sea sufi ciente como para completar el proceso de SPS.
Módulos de Control
Mayo 20091-19
M18044.15B
Jefe de taller
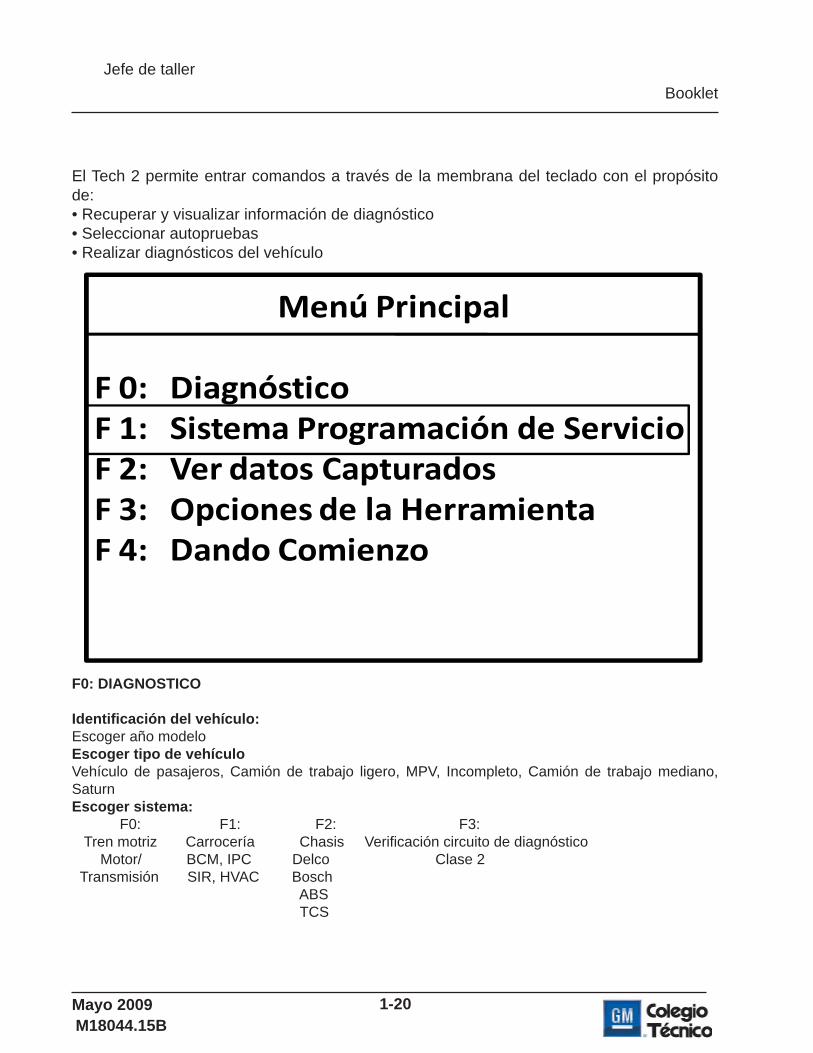
Menú Principal
F 0: DiagnósticoF 1: Sistema Programación de ServicioF 2: Ver datos CapturadosF 3: Opciones de la HerramientaF 4: Dando Comienzo
El Tech 2 permite entrar comandos a través de la membrana del teclado con el propósito de:• Recuperar y visualizar información de diagnóstico• Seleccionar autopruebas• Realizar diagnósticos del vehículo
F0: DIAGNOSTICO
Identifi cación del vehículo:Escoger año modeloEscoger tipo de vehículoVehículo de pasajeros, Camión de trabajo ligero, MPV, Incompleto, Camión de trabajo mediano, SaturnEscoger sistema: F0: F1: F2: F3: Tren motriz Carrocería Chasis Verifi cación circuito de diagnóstico Motor/ BCM, IPC Delco Clase 2 Transmisión SIR, HVAC Bosch ABS TCS
Booklet
Mayo 2009 1-20

Red de Cominicación en el Vehículo
Comando de salidas
Al estar en el menú de diagnóstico, es posible tener acceso a cada uno de los sistemas mencionados con anterioridad. Al seleccionar alguno de ellos y proporcionar los datos solicitados, aparece otro menú de opciones los cuales dan la información de:
Tecla F0 - DTC’s de cada uno de los sietmas,
Tecla F1 - Datos del tren motriz, carroceria y chasis respectivamente y monitorización de mensajes clase 2 para Verifi cación circuito de diagnóstico.
Tecla F2 - Funciones especiales, que es una ayuda adicional al diagnóstico y comprobación de un sistema al proporcionar la función de comando de salidas para:
• Tren motriz - Controles de salidas de motor, Controles de salida de transmisión, Sistema de combustible, Sistema IAC, Aprendizaje del sistema de variación de posición del cigüeñal.• Carroceria - Relevador, Control de salidas, Reprogramación, Medidores• Chasis - Prueba de relevador, Prueba de luces
Tecla F3 - Instantánea (snapshot)
Tecla F4 y F5 sólo para tren motriz
Para asegurar que cada una de las pruebas que se hacen a cada uno de los actuadores de los sistemas del vehículo, hay que comparar el resusltado u operación del componente con las tablas “Parametros de Datos” y “Controles de Salida” de cada sistema y módulo correspondiente.
Módulos de Control
Mayo 20091-21

M18044.15B
Jefe de taller
F1: SISTEMA PROGRAMACION DE SERVICIO(sólo para la programación remota)Solicitar Información.Continuar (tecla soft) con instruccionesIdentifi cación del vehículo:Marca(s)Año(s) del modeloTipo(s) de vehículo(s)Modelo (carrocería, estilo)Continuar (tecla soft) con instruccionesVerifi cación de VIN (S/N)Pantalla de instrucciones de procedimientos
F2: VER DATOS CAPTURADOS
Información Capturada
F0: Información de DTCF1: Condiciones del momento/
registro del fallo
Instantánea
Seleccionar parámetros, Gráfi ca, Seleccionar imagen, Retroceso
automático, Parar, Avance automático, Primera imagen, Imagen de disparo, Ultima imagen, Unidades, Imagen
anterior, Imagen siguiente, DTC, Anterior cambio DTC, Siguiente cambio DTC
F3: OPCIONES DE LA HERRAMIENTA
F0: Puesta en Hora del RelojF1: Ajustar Contraste de PantallaF2: Ajustar unidades (Métrico o Inglés)F3: AutopruebasF4: Ajuste Mod. Centro de Entrenamiento (Instructor o Estudiante)F5: Programación del Tech 2F6: Establecer Modo Desvío de Comunicación.F7: Hacer Duplicado de Tarjeta PCMCIAF8: Establecer idiomaF9: Diagnósticos CANdi
Booklet
Mayo 2009 1-22

Red de Cominicación en el Vehículo
F4: Dando comienzo
La opción Dando Comienzo del Menú Principal del Tech 2 accede al Menú para Dar Comienzo. Dicha opción ofrece una visión general en línea del Tech 2, además de información sobre el funcionamiento de la herramienta. El menú para dar comienzo contiene las siguientes funciones:
F0: Controles de la Herramienta - Seleccionar una opción del Menú de Controles de la Herramientaprovee información sobre las funciones de ayuda del Tech 2, distribución del teclado, control de contraste de la pantalla, y teclas soft.F1: Equipo - El menú de Equipo ofrece información de la pantalla, extracción del módulo VCI, extracción e introducción de la tarjeta PCMCIA, cables/adaptadores y conectores de energía, correas y varilla, y puerto RS-232 y puerto RS-485.F2: Particularidades del Tech 2 - Esta selección despliega una secuencia de entrada de información del vehículo para un vehículo fi cticio.F3: Programando el Tech 2 - Esta opción proporciona instrucciones para descargar información desde un terminal al Tech 2. Debido a una secuencia de sucesos que se ha producido durante la evolución de la herramienta Tech 2, esta opción duplica la función Programando el Tech 2 del menú Opciones de la Herramienta.
Módulos de Control
Mayo 20091-23
Uso del Candi
El módulo CANdi es un módulo de cable en línea que funciona con los componentes de la herramienta Tech 2 existentes que incluyen el VCI, los cables y los adaptadores. Una vez instalado, el módulo CANdi es totalmente compatible con las versiones de software de la herramienta Tech 2 actuales y anteriores.El módulo se conecta de una forma sencilla y clara para el usuario. Esto permite que el software existente de la herramienta Tech 2 pueda utilizarse sin que sea necesario hacer cambio alguno cuando se instale el módulo CANdi. Cuando un vehículo requiera la utilización de un módulo CANdi, la herramienta Tech 2 habilitará las funciones específi cas del módulo.La función principal del módulo CANdi es añadir la función CAN (red de área de controlador) a laherramienta Tech 2. La siguiente lista resume las características básicas del módulo CANdi: • Admite comunicaciones simultáneas en los tres buses CAN. • Ofrece comunicaciones UART de alta velocidad con la herramienta Tech 2.La herramienta Tech 2 controla el funcionamiento del módulo CANdi. Una vez instalado, el módulo CANdi no interferirá con los procedimientos de diagnosis que esté llevando a cabo la herramienta Tech 2.La utilización del módulo no requiere cambios físicos en la herramienta Tech 2, en los cables o en los adaptadores. El módulo funciona de un modo transparente hasta que se activa con la herramienta Tech 2.Una vez activado, el módulo CANdi funciona bajo el control de la herramienta Tech 2. El software de la aplicación Tech 2 cargado en la tarjeta PCMCIA de la herramienta Tech 2 determina todas las funciones.

M18044.15B
Jefe de taller
Las actualizaciones de software del módulo CANdi se almacenan en la tarjeta PCMCIA de 32 me-gabytes.Cuando se conecte al cable de diagnosis del vehículo y se encienda la herramienta Tech 2, el mó-dulo CANdi se actualizará automáticamente. Cuando se actualice un módulo CANdi, aparecerá la pantalla una indicación del progreso de la actualización de software. Si se produce algún problema relacionado con la actualización, éste se mostrará en la herramienta Tech 2. Cuando la actualiza-ción haya fi nalizado correctamente, podrá obtener la versión del software actual del módulo CANdi siguiendo estos pasos: F9: Seleccione Diagnósticos CANdi desde el menú Opciones de la Herramienta F0: Seleccione Resultados POST desde el menú Diagnósticos CANdi
Booklet
Mayo 2009 1-24

Red de Cominicación en el Vehículo
Tech 2 CANDI FLASH
Vehicle Interface ModuleSoftware Update
In Progress
Please Wait…
0% Completed
Módulos de Control
Mayo 20091-25
M18044.15B
Jefe de taller
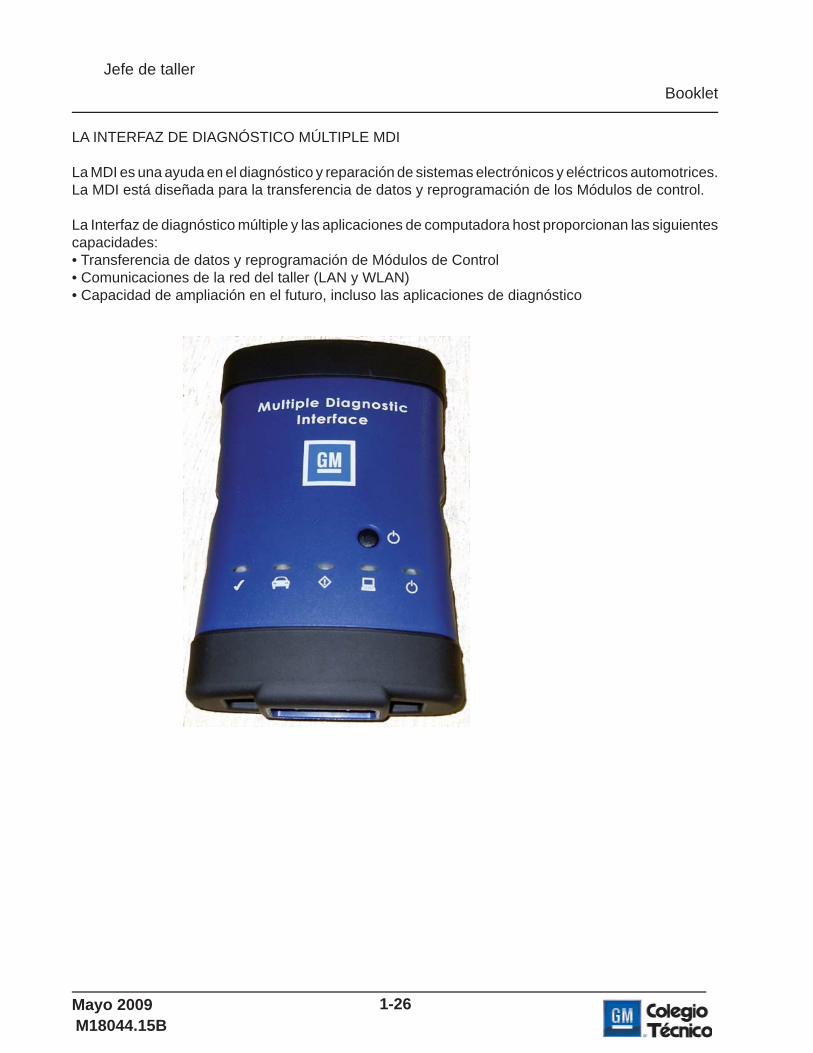
LA INTERFAZ DE DIAGNÓSTICO MÚLTIPLE MDI
La MDI es una ayuda en el diagnóstico y reparación de sistemas electrónicos y eléctricos automotrices. La MDI está diseñada para la transferencia de datos y reprogramación de los Módulos de control.
La Interfaz de diagnóstico múltiple y las aplicaciones de computadora host proporcionan las siguientes capacidades:• Transferencia de datos y reprogramación de Módulos de Control• Comunicaciones de la red del taller (LAN y WLAN)• Capacidad de ampliación en el futuro, incluso las aplicaciones de diagnóstico
Booklet
Mayo 2009 1-26

Red de Cominicación en el Vehículo
Mayo 20091-27
Módulos de Control
Medición y prueba de circuito
Algunas veces, mientras diagnostica un problema específi co del cliente o después de una reparación, los técnicos pueden encontrar varios códigos de falla debido a:
- El vehículo no arranca. - El vehículo arranca pero no se mantiene. - Mensajes y luces de advertencia del sistema de mejora de la estabilidad del vehículo, MIL, ABS - Errores de posición del indicador de velocidad PRNDL. - Luces de advertencia del sistema del monitor de la presión de la llanta (TPM), etc.
La falla no siempre está ubicada en el módulo, sensor o actuador que considere un código de falla, los circuitos tambien intervienen de forma importante en la operación de los sistemas, por lo tanto es necesario hacer las comprobaciones que indique el manual de servicio.
Las pruebas básicas a los circuitos son:
• Medir voltaje• Medir continuidad• Medir frecuencia• Prueba de corto a tierra• Prueba de corto a voltaje
Los multimetros actuales son “autorango” por lo que automáticamente detectan la energía, corriente o resistencia a medir. Para hacer más exacta la medida hay que apretar la tecla “range” (rango) para mover el punto decimal y obtener la lectura real.
Al hacer cualquier tipo de medición utilice siempre la escala mayor (V, A), una ves identifi cada la lectura, seleccione el rango adecuado o mueva la conexión roja a las escalas de milesimas si es el rango a utilizar.
Mediendo voltaje/energía
Conectar los cables de prueba al equipo y la perilla selectora como se muestra:
Para medir voltaje de corriente alterna
Para medir voltaje de corriente directa
Para ambas mediciones los cables de prueba se conectan de la misma manera en el multimetro, lo único que cambia, es la posición de la perilla selectora de medida.

M18044.15B
Jefe de taller
Mayo 2009 1-28
Booklet
Para medir milivolts
Una ves identifi cado el valor de la lectura y este es equivale a milesimas de volt, gire la perilla selectora a la posición mV. En esta posición se pueden leer milivolts de corriente alterna (AC) o corriente directa (DC).
Precaución: No inserte las puntas de prueba del equipo (DMM) en cualquier conector o terminal. El diámetro de las puntas de prueba deformarán la mayoría de las terminales. Una terminal deformada ocasiona una conexión defi ciente, que traduce en falla en el sistema. Siempre utilice el kit de prueba de terminales aprobado por GM- J-35616, para examinar las terminales. No utilice sujetadores de papel u otros sustitutos para las terminales de prueba.
Pruerba de caida de voltaje
Como se muestra en la fi gura anterior, al medir el voltaje en cada una de los componentes del circuito, se hace una conexión en paralelo de las puntas de prueba del miltimetro, la punta roja del lado positivo del circuito y la punta negra del lado negativo del circuito.

Red de Cominicación en el Vehículo
Para hacer prueba de frecuencia en un sensor, por ejemplo, se aprieta el boton de hertz dejandose las puntas de prueba en la misma posición en el equipo.
Mediendo Resistencia y continuidad
Conectar los cables de prueba al equipo y la perilla selectora como se muestra:
Como lo muestra el diagrama de la izquierda, el componente del circuito al que se está midiendo su resistencia esta aislado del circuito, aun así, para evitar que haya energía presente durante la prueba el interruptor está abierto. Las puntas de prueba se colocan en el conponente sin importar su polaridad.
Las puntas estan conectadas en paralelo, la lectura de resistencia se interpreta tomando en cuenta el simbolo que aparece a la derecha de la pantalla, ya sea:mmili-ohmsohmsKKilo-ohmsMMega-ohms
Módulos de Control
Mayo 20091-29

M18044.15B
Jefe de taller
En esta fi gura, el cable del circuito está aislado y el interruptor de energía esta abierto para asegurar que el circuito no tenga energía al estar haciendo la prueba.Las puntas de prueba estan colocadas a cada extremo del cable, no importando la polaridad o dirección del cable.
Al estar midiendo la resistencia como se menciona antes, se comprueba la continuidad del componente o cable del circuito. Si en la pantalla del multimetro aparecen las letras OL (Open Loop-circuito abierto), el componente no sirve por presentar resistencia con valor infi nito, o el cable está roto en algun punto. Si la lectura está próxima a cero o es cero (0.0 ohms), indica que el componente o el cable tienen continuidad en el paso de la energía.
Conponente o cable abierto, lectura OL
Conponente o cable con continuidad, lectura cercana a cero o 0.0
P r e c a u c i ó n : Está prohibido hacer pruebas de resistencia o continuidad en circuitos y conponentes del sistema de bolsas de aire.
Booklet
Mayo 2009 1-30

Red de Cominicación en el Vehículo
Probando diodos
Al hacer una prueba de diodos, primero determinar si es un diodo + o un diodo - .
Si se prueba un diodo positivo (+) la punta de prueba roja debe hacer contacto con el lado positivo del diodo y la punta negra de prueba debe hacer contacto con el lado negativo del diodo. Debe aparecer una lectura en la pantalla del equipo, invertir la conexión de las puntas en el diodo, no debe haber lectura alguna. Esto indica que el diodo esta bien, de igual manera se hace la prueba para el diodo negativo.Si al hacer la prueba en ambos sentidos no hay lectura en el multimetro, quiere decir que el diodo está dañado
Midiendo amperaje/intencidad
Conectar los cables de prueba al equipo y la perilla selectora como se muestra:
Una ves hecho lo anterior, las puntas se conectan en serie, como lo muestra el circuito. Observe que el interruptor de energía esta cerrado, lo que indica que hay paso de energía por el circuito.Al hacer la medición de amperaje, no se deben cortar los cables del circuito.
Módulos de Control
Mayo 20091-31

M18044.15B
Jefe de taller
Para medir un amperaje mayor, el equipo debe contar con un conector específi co al que se conecta la pinza inductiva para medir amperajes mayores a 10Amp., como lo mestra la siguiente fi gura.
La pinza inductiva se usa tambien para medir el amperaje de carga del alternador a la bateria, comprobando su operación
Precaución: En la escala del equipo, está indicado el máximo de amperaje que puede medirse, no intente medir un amperaje mayor al indicado, el amperimetro se puede dañar.
Para medir miliamperes se debe cambiar el cable de prueba de conector en el multimetro, las puntas de prueba se siguen conectando en serie en el circuito a probar.
Prueba de corto a tierra
PELIGRO: Este procedimiento no se debe realizar en circuitos de alto voltaje. Realizar este procedimiento en circuitos de alto voltaje puede provocar lesiones serias o la muerte.
1. Desconecte la energía (batria, fusibles, módulo de control) del circuito a probar. 2. Desconecte el componente eléctrico o electrónico3. Coloque la perilla selectora en la posición de ohm (). 4. Conecte una punta de prueba a un extremo del circuito que se está probando. 5. Conecte la otra punta de prueba a una buena tierra. 6. Si el multimetro NO muestra resistencia infi nita (OL), hay un corto a la tierra del circuito.
Booklet
Mayo 2009 1-32

Red de Cominicación en el Vehículo
Probar un corto a voltaje PELIGRO: Este procedimiento no se debe realizar en circuitos de alto voltaje. Realizar este procedimiento en circuitos de alto voltaje puede provocar lesiones serias o la muerte.
Precaución: Consulte Precaución con el comprobador de prueba en Notas y Precauciones.
El siguiente procedimiento prueba un corto en el voltaje en un circuito.1. Coloque la perilla selectora en la posición V (DC). 2. Conecte la punta de prueba positiva del multimetro a un extremo del circuito a probar. 3. Conecte la punta de prueba negativa del multimetro a una buena tierra. 4. ENCIENDA la ignición y opere todos los accesorios. 5. Si el voltaje que se mide es mayor 1 voltios, hay un corto a voltaje en el circuito.
Prueba continuidad PELIGRO: Este procedimiento no se debe realizar en circuitos de alto voltaje. Realizar este procedimiento en circuitos de alto voltaje puede provocar lesiones serias o la muerte.
Precaución: Consulte Precaución con el comprobador de prueba en Notas y Precauciones.
Los siguientes procedimiento sirven para comprobar una buena continuidad en un circuito.1. Utilice el multimetro digital2. Coloque la perilla selectora en la posición de ohm. 3. Desconecte la energía (batería, fusibles, módulo de control) del circuito a probar. 4. Desconecte el conponente5. Oprima el botón MIN MAX del multimetro, si es autorango, automáticamente da la lectura. 6. Conecte una punta de prueba a un extremo del circuito que está probando. 7. Conecte la otra punta de prueba al otro extremo del circuito. 8. Si el multimetro muestra resistencia baja o cero resistencia, el circuito tiene buena continuidad. 9. Si el multimetro muestra “OL” el cable esta abierto, no hay continuidad.
Medir frecuencia Precaución: Consulte precaución con el comprobador de prueba en Notas y Precauciones.
El siguiente procedimiento determina la frecuencia de una señal.
Nota: Conectar el multimetro al circuito antes de presionar el botón Hz, permitirá al multimetro de autorango colocarse en una gama apropiada.
1. Aplique energía al circuito. 2. Coloque la perilla de selección en la posición V (AC) o en la posición de Hertz (Hz)3. Conecte la punta positiva del multimetro en el circuito que ha de ser probado. 4. Conecte la punta negativa del multimetro a una buena tierra. 5. Presione el botón Hz en el multimetro, si así biene equipado. 6. El multimetro mostrará la frecuencia medida.
Módulos de Control
Mayo 20091-33

M18044.15B
Jefe de taller
NOTAS
______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Booklet
Mayo 2009 1-34

Red de Cominicación en el Vehículo
Mód
ulo
2P
roto
colo
s de
Com
unic
ació
n
Mayo 20092-1
Protocolos de Comunicación
Objetivo:
Al fi nalizar el curso el alumno será capaz de:
• Realizar un servicio a keyword usando el procedimiento • Realizar un servicio a infotainment usando el procedimiento • Realizar un servicio a UART usando el procedimiento • Realizar un servicio a can de 1 cable usando el procedimiento • Realizar un servicio a can de 2 cables usando el procedimiento • Realizar un servicio a GMLAN alta usando el procedimiento • Realizar un servicio a GMLAN media usando el procedimiento • Realizar un servicio a GMLAN baja usando el procedimiento • Realizar un servicio a most usando el procedimiento • Realizar un servicio a clase II usando el procedimiento

M18044.15B
Jefe de taller
2. Protocolos de Comunicación
¿Qué es Multiplex?
Es la transmisión de información múltiple entre varias computadoras del vehículo, a través de uno o dos cables que integran la red de comunicación.
Sirve para disminuir el número de cables en una red, se emplea este método de multiplexión, que permite que en un mismo cable viajen varias señales o mensajes al mismo tiempo. Estos mensajes que viajan a través de la red de comunicación a los módulos, viajan en periodos alternos de tiempo que se conocen como TDM (Time Division Multiplexing), multiplexión en tiempo dividido. Al llegar el mensaje al módulo que necesita la información, lo toma o lo deja pasar al siguiente módulo.
Estos mensajes se dividen en tres partes: • Encabezado – contiene la información que los identifi ca (sensor del que proviene) • Cuerpo – contiene la información (medición de presión, temperatura, por ejemplo) • Final – indica el termino de la información digital.
Datos seriados
Las computadoras del vehículo se comunican entre sí por medio de Datos Seriados que son una serie de “palabras” que dan forma a un mensaje. Cada palabra está compuesta de 8 bits.
UN MENSAJE
UNA PALABRA
8 BITS
UNA PALABRA
8 BITS
UNA PALABRA
8 BITS
LAS PALABRAS DIGITALES SON ENLAZADAS PARA CREAR MENSAJES DE
DATOS SERIADOS
1 11111111110 0000000000 1 1
Mayo 2009 2-2
Booklet
Red de Cominicación en el Vehículo
Mayo 20092-3
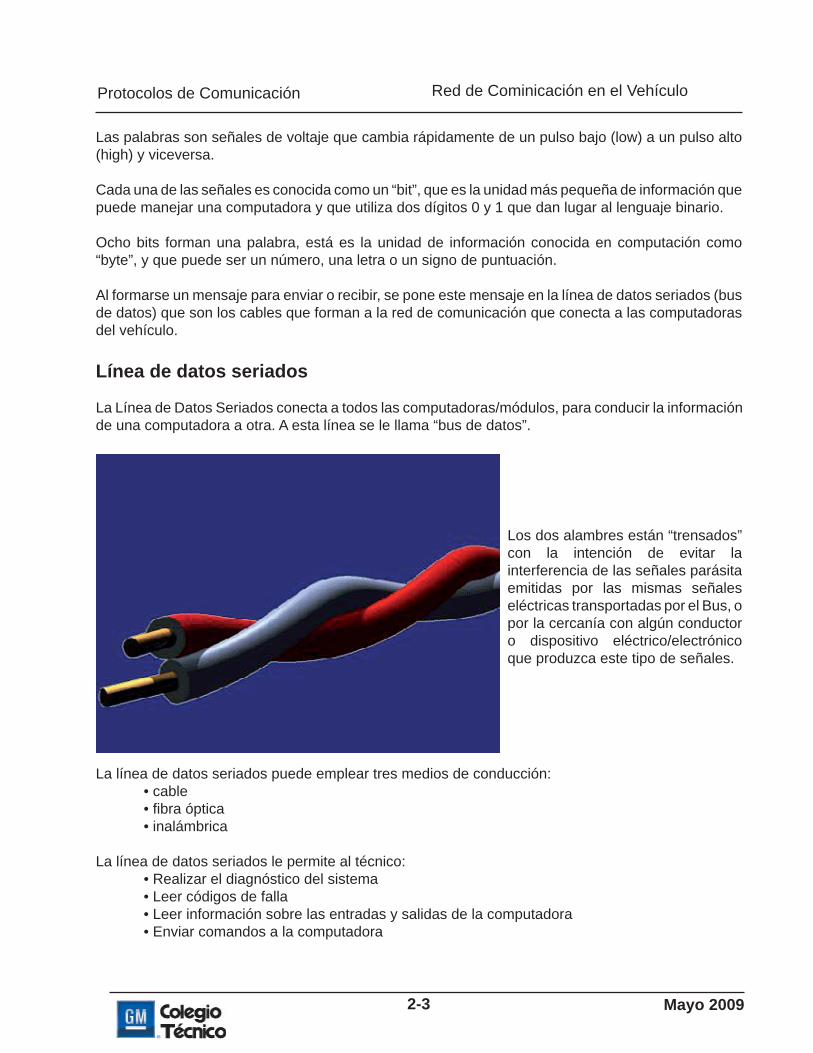
Línea de datos seriados
La Línea de Datos Seriados conecta a todos las computadoras/módulos, para conducir la información de una computadora a otra. A esta línea se le llama “bus de datos”.
Los dos alambres están “trensados” con la intención de evitar la interferencia de las señales parásita emitidas por las mismas señales eléctricas transportadas por el Bus, o por la cercanía con algún conductor o dispositivo eléctrico/electrónico que produzca este tipo de señales.
Las palabras son señales de voltaje que cambia rápidamente de un pulso bajo (low) a un pulso alto (high) y viceversa.
Cada una de las señales es conocida como un “bit”, que es la unidad más pequeña de información que puede manejar una computadora y que utiliza dos dígitos 0 y 1 que dan lugar al lenguaje binario.
Ocho bits forman una palabra, está es la unidad de información conocida en computación como “byte”, y que puede ser un número, una letra o un signo de puntuación.
Al formarse un mensaje para enviar o recibir, se pone este mensaje en la línea de datos seriados (bus de datos) que son los cables que forman a la red de comunicación que conecta a las computadoras del vehículo.
La línea de datos seriados puede emplear tres medios de conducción: • cable • fi bra óptica • inalámbrica
La línea de datos seriados le permite al técnico: • Realizar el diagnóstico del sistema • Leer códigos de falla • Leer información sobre las entradas y salidas de la computadora • Enviar comandos a la computadora
Protocolos de Comunicación

M18044.15B
Jefe de tallerBooklet
Mayo 2009 2-4
Por ejemplo, el panel de instrumentos reúne información de varias partes del vehículo. Si alguna computadora registra un código de falla (DTC) durante el primer ciclo de ignición, la computadora almacena en la memoria “marco de datos congelados” (Freeze Frame) las condiciones de operación y enciende la luz MIL (Malfunction Indicator Lamp) en el panel de instrumentos, registrandose un código tipo A.
Un código tipo B se registra hasta el segundo ciclo de ignición y la información se guarda en la memoria “registro de falla” (Failure Record) de la computadora, que también prende la luz MIL en el panel. Siempre se da prioridad a los códigos relacionados con las altas emisiones del vehículo.
Como se menciono al principio de este tema, el BUS de datos transmite en intervalos de tiempo breves, uno o más mensajes a través de un protocolo (trama) de enlace de datos entre las unidades de control.El protocolo está compuesto por siete secciones.
Inicio – marca el comienzo del protocolo de enlace de los datos. En el cable CAN-High se transmite un bit con aprox. 5 voltios (en función del sistema) y en el cable CAN-Low se transmite un bit con aprox. 0 voltios.
Identifi cador – se defi ne la prioridad del protocolo. Si p. ej. hay dos unidades de control que intentan transmitir simultáneamente su protocolo de datos, se concede la preferencia al protocolo de prioridad alta.
Campo de control – Se especifi ca la cantidad de información que está contenida en el campo de datos. De esa forma, cada receptor puede revisar si ha recibido la información completa.
Información – se transmite la información para las demás unidades de control.
Campo de verifi cación – sirve para detectar fallos en la transmisión.
Acuse de recibido – los módulos receptores avisan al transmisor, que han recibido correctamente el protocolo de enlace de datos. Si detectan cualquier fallo, informan de inmediato al transmisor. A raíz de ello, el transmisor repite el mensaje.
Fin del mensaje – fi naliza el protocolo de datos.
Inicio IdentificadorCampo de
controlInformación
Campo de verificación
Acuse de recibido
Fin del mensaje
Encabezado Cuerpo Final

Red de Cominicación en el Vehículo
Mayo 20092-5
TCM
ABS
ECM
BUS
Si varias unidades de control pretenden transmitir simultáneamente su protocolo de datos, es preciso decidir cuál de ellos se transmite primero.
Arbitraje
• Es el método para resolver confl ictos causados por múltiples mensajes simultaneos en la red.• La transmisión simultanea es detectada y solucionada de inmediato.• Los mensajes de alta prioridad continúan, mientras que los de menor prioridad esperan hasta que el mensaje de alta prioridad concluye.
Los rangos de prioridad de los mensajes se encuentra en los primeros 3 bits de información, por lo tanto el código binario establece:
Valor del dígito 8 4 2 1 0 0 0 0 = 0 (Sistema de seguridad) alta prioridad 0 0 0 1 = 1 0 0 1 0 = 2 0 0 1 1 = 3 0 1 0 0 = 4 0 1 0 1 = 5 0 1 1 0 = 6 0 1 1 1 = 7
El protocolo con alta prioridad se transmite primero.
Así p. ej., el mensaje de datos del módulo de control para ABS es, por motivos de seguridad, más importante que el mensaje del módulo de control de la transmisión automática, si los motivos están referidos al control de emisiones del motor. Por lo tanto:
1. En el siguiente grafi co hay 3 módulos que envían un mensaje cada uno al mismo tiempo, el identifi cador analiza los mensajes para dejar continuar al de alta prioridad y posteriormente a los otros dos, según su nivel de prioridad, de acuerdo a la tabla anterior.
Ident.
Protocolos de Comunicación
Inicio 0001 0001 1111
Inicio 0001 0000 0000
Inicio 0001 0000 0101
Inicio 0001 0000 0000

M18044.15B
Jefe de tallerBooklet
Mayo 2009 2-6
BUS
BUS
TCM
TCM
ABS
ABS
ECM
ECM
Ident.
Ident.
2. En el siguiente grafi co, el identifi cador detiene el avance del mensaje del módulo TCM por ser de baja prioridad, ver tabla anterior. Los mensajes de los módulos ABS y ECM continúan avanzando.
3. Ahora el identifi cador detiene el avance del mensaje del módulo ECM por ser de mediana prioridad comparado con el mensaje del módulo ABS que es de alta prioridad, por lo que el mensaje del módulo ABS, es el que toma la delantera en el Bus de datos. El mensaje continua por las partes restantes de la “trama” hasta completar todo el proceso en la transmisión de datos a los demás módulos.
Inicio 0001 0001 1111
Inicio 0001 0000 0000
Inicio 0001 0000 0101
Inicio 0001 0000 0000
Inicio 0001 0001 1111
Inicio 0001 0000 0000
Inicio 0001 0000 0101
Inicio 0001 0000 0000

Red de Cominicación en el Vehículo
Mayo 20092-7
Protocolos
General Motors usa diferentes líneas de datos seriados o protocolos de comunicación como:
• UART (Receptor y Transmisor Asíncrono Universal)• Entretenimiento & Confort• Keyword 82• Keyword 2000• Interface Simple de Bus(SBI)• Interface Periférica Serial (SPI)• Clase 2• CAN de un Cable (Aérea de Comunicación en Red)• CAN doble Cable• MOST (Sistema Media de Transferencia Orientada)
UART. Usa anchos de pulso iguales en cada Bit
• Se usa en las confi guraciones de red Maestro/Esclavo y Punto a Punto• La velocidad de transmisión es de 8192 b/s• Se aplica para las funciones de Diagnóstico y Control• Su medio de transmisión es de Un Cable• El número máximo de computadoras conectadas es de 10• La longitud máxima de la Línea es de 20 metros
Entretenimiento & Confort
• Se usa en las confi guraciones de red Maestro/Esclavo y Punto a Punto• La velocidad de transmisión es de 1000 b/s• Se aplica para las funciones de Diagnóstico y Control• Su medio de transmisión es de Un Cable• El número máximo de computadoras conectadas es de 10• La longitud máxima de la Línea es de 20 metros• Comunica a ECM, componentes del sistema de audio, ventilación y calefacción aut.
Keyword 82
• Se usa en las confi guraciones de red Maestro/Esclavo y Punto a Punto• La velocidad de transmisión es de 8192 b/s• Se aplica para las funciones de Diagnóstico• Su medio de transmisión es de Un Cable• El número máximo de computadoras conectadas es de 10• La longitud máxima de la Línea es de 20 metros• Se comunica con SDM, Módulo de dirección, Módulo de control de calefacción y A/AC, EBCM, Módulo de control de crucero, Módulo de control de nivel automático.
Protocolos de Comunicación

M18044.15B
Jefe de tallerBooklet
Mayo 2009 2-8
Keyword 2000 Ancho de pulso fi jo.
• Se usa en las confi guraciones de red Maestro/Esclavo y Punto a Punto• La velocidad de transmisión es de 10400 b/s• Se aplica para las funciones de Diagnóstico• Su medio de transmisión es de Un Cable• El número máximo de computadoras conectadas es de 10• La longitud máxima de la Línea es de 20 metros• Comunica a Computadoras del motor, Computadoras de la transmisión.
Interface Simple de Línea o Bus (SBI)
• Se usa en las confi guraciones de red Maestro/Esclavo y Punto a Punto• La velocidad de transmisión es de 6670 bits/seg• Se aplica para las funciones de Diagnóstico y Control• Su medio de transmisión es de Un Cable• El número máximo de computadoras conectadas es de 32• La longitud máxima de la Línea es de 8 metros• Para comunicación entre Módulos de puertas e interruptores de puertas.
Interface Periférica en Serie (SPI)
• Se usa en las confi guraciones de red Maestro/Esclavo• La velocidad de transmisión es Menor a 4.2 Mb/s• Se aplica para las funciones de Flujo de Información• Su medio de transmisión es de Tres Cables• El número máximo de computadoras conectadas No está especifi cado• La longitud máxima de la Línea es Menor a 10 metros• Para comunicación entre los Módulos de control de la carrocería y el panel de instrumentos.
Clase 2
• Se usa en las confi guraciones de red Anillo, Estrella o una combinación de ambas• La velocidad de transmisión es de 10.4 Kbits/seg• Se aplica para las funciones de Diagnóstico y Control• Su medio de transmisión es de Un Cable• El número máximo de computadoras conectadas es de 32• La longitud máxima de la Línea es de 35 metros

Red de Cominicación en el Vehículo
Mayo 20092-9
CAN de Un Cable o Baja Velocidad
• Se usa en las confi guraciones de red Anillo, Estrella o una combinación de ambas• La velocidad de transmisión es de 20.8 Kb/s a 125 Kb/s• Se aplica para las funciones de Diagnóstico y Control• Su medio de transmisión es de Un Cable• El número máximo de computadoras conectadas es de 32• La longitud máxima de la Línea es de 60 metros
NOTA: CAN de Un Cable también se llama de baja velocidad, comparada con CAN de doble Cable
CAN Doble Cable
• Se usa en las confi guraciones de red Lineal, Daisy Chain o una combinación de ambas• La velocidad de transmisión es de 500 Kb/s a 1 Mb/s• Se aplica para las funciones de Diagnóstico y Control• Su medio de transmisión es de Dos Cables• El número máximo de computadoras conectadas es de 16• La longitud máxima de la Línea es de 30 metros
MOST
• Se usa en las confi guraciones de red de Anillo• La velocidad de transmisión es de 25 Mb/s• Se aplica para las funciones de Flujo de Información y Control• Su medio de transmisión es de Fibra Óptica• El número máximo de computadoras conectadas es de 24• La longitud máxima de la Línea es Infi nita
Protocolos de Comunicación

M18044.15B
Jefe de tallerBooklet
Mayo 2009 2-10
Fibra óptica
Los conductores de fi bra óptica son fi lamentos de vidrio fl exible, del espesor de un cabello. Llevan mensajes en forma de haces de luz que realmente pasan a través de ellos de un extremo a otro, donde quiera que el fi lamento vaya, aún en curvas o esquinas, sin interrupción. La mayoría de las fi bras ópticas se hacen de arena o silice, materia prima abundante en comparación con el cobre. Con un kilogramo de vidrio pueden fabricarse aproximadamente 43 kilometros de fi bra óptica.
Ventajas de la fi bra óptica
• Insensibilidad a la interferencia electromagnética• La fi bra no pierde luz, por lo que la transmisión de datos es segura• Liviano y reducido tamaño del cable capaz de llevar un gran número de señales• Grandes velocidades en la transmisión de datos

Red de Cominicación en el VehículoConfi guraciones de conexión
Mayo 20093-1
Mód
ulo
3C
onfi g
urac
ione
s de
con
exió
nObjetivo:
Al fi nalizar el curso el alumno será capaz de:
• Realizar un servicio a confi guraciones usando el procedimiento • Diagnosticar la confi guración lineal usando la EBD • Diagnosticar la confi guración estrella usando la EBD • Diagnosticar la confi guración anillo usando la EBD • Diagnosticar la confi guración daisy chain usando la EBD • Diagnosticar la confi guración punto a punto usando la EBD • Diagnosticar la confi guración maestro-esclavo usando la EBD
M18044.15B
Jefe de taller
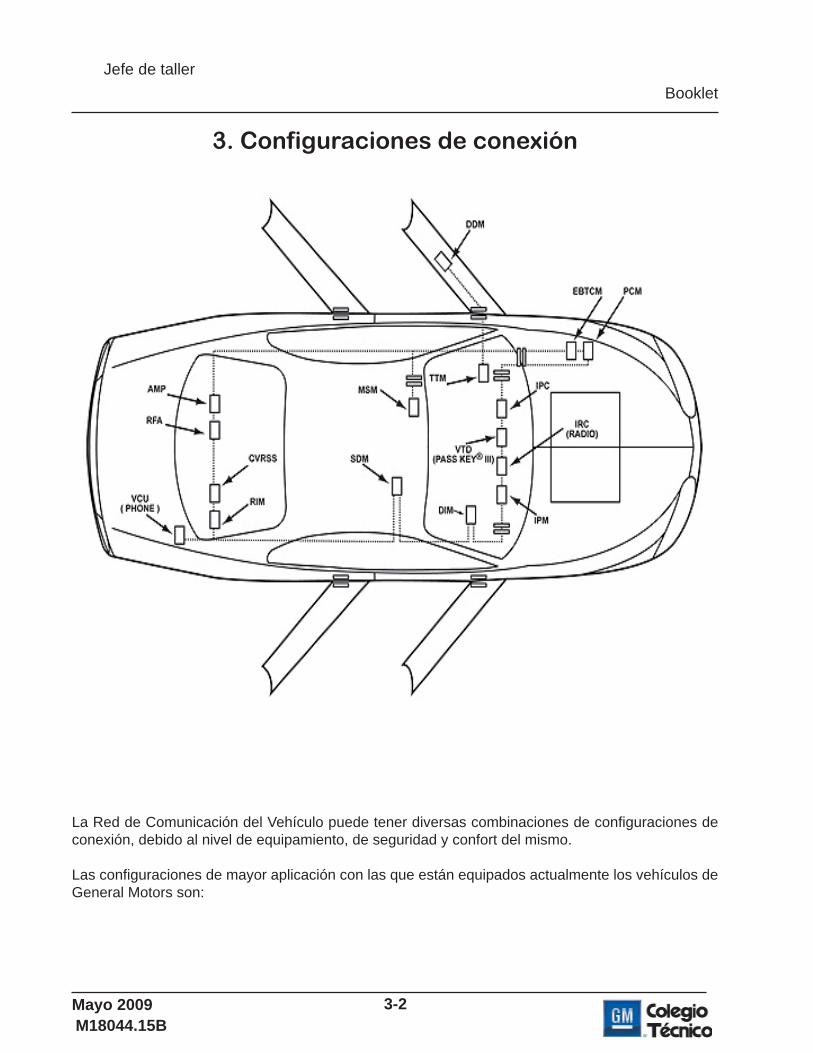
3. Configuraciones de conexión
La Red de Comunicación del Vehículo puede tener diversas combinaciones de confi guraciones de conexión, debido al nivel de equipamiento, de seguridad y confort del mismo.
Las confi guraciones de mayor aplicación con las que están equipados actualmente los vehículos de General Motors son:
Mayo 2009 3-2
Booklet

Red de Cominicación en el Vehículo
Mayo 20093-3
Punto a Punto
Confi guraciones de conexión
Punto a punto.Usa los protocolos:
• UART
• E&C
• KW 82
• KW 2000
• SBI.
Se aplica para las funciones de Diagnóstico y control.Benefi cios - Es un sistema sencillo en donde no hay puntos de conexión o interconexión.Desventajas - Si la línea se abre, el sistema se cae.Medio usado - Es de un cable o dos cables trenzados

M18044.15B
Jefe de tallerBooklet
Mayo 2009 3-4
AnilloAnilloUsa los protocolos:
• Clase 2
• CAN de un cable
• MOST
Benefi cios - Redundancia, si la línea se abre el mensaje puede viajar en la otra dirección, en fi bra óptica no lo puede hacer.Desventajas - Dos conexiones por nodo, más cableado y mayor difi cultad para la ruta del arnes en el vehículo.Medio usado - Un sólo cable, fi bra óptica.

Red de Cominicación en el Vehículo
Mayo 20093-5
Lineal
Confi guraciones de conexión
Lineal.Usa el protocolo:
• CAN doble cable
Se aplica para las funciones de Diagnóstico y control.
Benefi cios - Es bastante sencillo con un mínimo de conexiones e interconexiones. Es muy sencillo establecer la ruta del alambrado en el vehículo. No implica un orden de conexión de los módulos.Desventajas - Una ruptura en la línea puede dejar varios módulos fuera de comunicación.Medio usado - Un sólo cable/2 cables trenzados

M18044.15B
Jefe de tallerBooklet
Mayo 2009 3-6
Estrella
EstrellaUsa los protocolos:
• Clase 2
• CAN de un cable
Benefi cios - Estructura centralizada, la ruptura en una línea deja fuera de comunicación a un sólo móduloDesventajas - Implica el uso de un empalme “maestro” , todos los mensajes pasan por el empalme, mucho cableado.Medio usado - Un sólo cable.

Red de Cominicación en el Vehículo
Mayo 20093-7
Daisy Chain
Confi guraciones de conexión
CadenaUsa los protocolos:
• CAN de doble cable
Benefi cios - Bastante sencilla, menos cableado, un mínimo de conexiones e interconexiones, Desventajas - Una ruptura en una línea puede dejar varios módulos fuera de comunicación, la desconexión de un determinado módulo puede interrumpir toda la comunicación.Medio usado - 2 cablesVelocidad de transmisión - de 500 Kb/s a 1Mb/s

M18044.15B
Jefe de tallerBooklet
Mayo 2009 3-8
Maestro/esclavo
Usa los protocolos:
• UART
• E&C
• KW 82
• KW 2000
• SBI.
• SPI
Se aplica para las funciones de Diagnóstico, control y fl ujo de información.Benefi cios - Es un sistema sencillo en donde no hay puntos de conexión o interconexión.Desventajas - Si la línea se abre, el sistema se cae.Medio usado - Es de un cable, dos cables trenzados o tres cables (SPI).

Red de Cominicación en el Vehículo
Mayo 20093-9
Confi guraciones de conexión
Most
Compuerta
Compuerta
MOST
LINEAL
Anillo

M18044.15B
Jefe de taller
Diagnóstico de red basado en la EBD
El objetivo de aplicar el Diagnóstico basado en la EBD es proporcionar la guía de acción para cada red de comunicación. Al seguir un plan similar para cada red a diagnosticar, logrará una máxima efi ciencia al reparar los vehículos. Aunque cada uno de los cuadros de Diagnóstico con base en estrategia está enumerado, no se le requiere que complete cada cuadro a fi n de diagnosticar con éxito una queja del cliente. En el primer paso de su proceso de diagnóstico siempre debe obtener la mayor información posible del cliente. El paso fi nal de su proceso de diagnóstico debe ser Reparar y verifi car la Solución. Consulte la EBD al principio de este manual.
Aplicando la EBD.
1. Conprenda y verifi que la queja del cliente o el sintoma que presenta el vehículo.• Obtenga la mayor cantidad de información del cliente, si a él le sucedio la falla o síntoma• Si la falla se presento al concluir una reparación, mantenimiento o servicio, pregunte al personal involucrado para obtener la mayor cantidad de información posible.
2. Funcionamiento del vehículo según diseño.• Si el vehículo arranca y se desplaza, haga una prueba de camino.• Si el vehículo no arranca, continue con el paso 3.
3. Verifi caciones preliminares.• Haga la inspección visual y verifi que el funcionamiento del vehículo• Asegúrese de que la batería esté totalmente cargada. Consulte Inspec/prueba batería . • Asegúrese de que los cables de la batería estén limpios y apretados. • Inspeccione si hay fusibles abiertos. Consulte Esquema Distribución Potencia y Vistas ident centro eléctrico . • Asegúrese de que las conexiones a tierra estén limpias, apretadas y en la ubicación correcta. Consulte Esquema Distribución a Tierra y Vistas rot arnés . • Inspeccione los sistemas de acceso fácil o los componentes visibles del sistema para ver si hay daño obvio o problemas que puedan ocasionar el problema. Esto incluirá la verifi cación para asegurarse que todas las conexiones/conectores estén asegurados y asentados completamente. • Inspeccione los dispositivos de mercado secundario que pudieran afectar el funcionamiento del sistema. Consulte Rev acces posterior venta . • Busque boletines de servicio que apliquen. • Motor no se mueve (no gíra)• Motor no arranca• Motor arranca pero no se mantiene en funcionamiento• Tech 2 no enciende (no energiza) • Tech 2 no se comunica con dispositivo GMLAN de alta velocidad • Tech 2 no se comunica con dispositivo GMLAN de baja velocidad• DTC actual o presente• Síntoma sin DTC• Diagnósticos no publicados• DTC intermitente/histórico> Si las pruebas/inspecciones anteriores resuelven el problema, diríjase a Verifi cación de reparación de diagnóstico.
Booklet
Mayo 2009 3-10

Red de Cominicación en el Vehículo
Ane
xoM
DI,
Tech
2
Mayo 2009A-1
Confi guraciones de conexión

M18044.15B
Jefe de taller
Sistema de programación de servicio (SPS)
El sistema de programación de servicio (SPS) actualiza los archivos de calibración fl ash que se almacenan en un módulo exterior del vehículo (por ej. PCM, ABS, VTD). El archivo de calibración personaliza un módulo para determinado vehículo.
El archivo de calibración contiene datos como las curvas de chispa y control de combustible. Cuando solucione un problema de maniobrabilidad, es posible que el diagnóstico indique la reprogramación del controlador con la información de calibración más reciente para corregir la condición reportada por el cliente.
La Interfaz de diagnóstico múltiple (MDI) es su conexión entre su computadora y el conector DLC J1962 del vehículo para la programación Pass-Thru (Directa) de la ECU del vehículo.
El controlador del ECM/PCM generalmente puede utilizar cuatro tipos de comunicaciones seriales: • UART (Recepción y transmisión asíncrona universal) • Clase 2 • Palabra clave • GM LAN
Selección de la calibración correcta
Al volver a programar un vehículo, seleccionar la calibración correcta es indispensable. Sólo verá las calibraciones que son válidas para el VIN ingresado. Asegúrese de revisar el historial de cada calibración. El historial enumera una explicación del archivo de calibración, que indica a qué programa corresponde la calibración y si reemplaza a otras calibraciones. Es útil leer los boletines más recientes para estar actualizado sobre por qué se han liberado determinadas calibraciones. Los números de boletines relacionados, algunas veces se enumeran junto con los archivos de calibración.
Con base en el historial de calibración y boletines, seleccione el archivo de calibración apropiado.
Para muchos vehículos, también necesitará completar varias selecciones de fi cha. Cada fi cha es para un archivo de calibración distinto. Una casilla no marcada en una fi cha del sistema indica que no se ha hecho la selección adecuada.
Si necesita un número de VCI, comuníquese con su Centro de asistencia al cliente de su localidad. Una vez que tenga el número de VCI, deberá ingresarlo en la pantalla de registro cuando así lo solicite el SPS.
La MDI utiliza la programación Pass-Thru (Directa) (consulte Realizar la programación a través de pasos en la Figura VIIC-12).
Mayo 2009 A-2
Booklet

Red de Cominicación en el Vehículo
Mayo 2009A-3
Módulos de Control
Sin importar el vehículo participante, el proceso general de tres partes para la programación del SPS es el siguiente:
1. Revise el módulo de control del vehículo para determinar si hay alguno, en el archivo de calibración que está almacenado actualmente.
2. Determine si se requiere una actualización.
3. Transfi era los datos seleccionados al módulo de control del vehículo.
AVISO
Antes de utilizar el SPS, es importante observar las siguientes precauciones:
• Si utiliza una versión no actualizada, se podrían dañar los módulos del vehículo. La terminal y la Interfaz de diagnóstico múltiple deben contar con el software más reciente.
• Asegúrese de que la batería del vehículo esté totalmente cargada. El voltaje de la batería para el SPS debe estar entre 12 y 14 voltios. Sin embargo, un cargador de batería no debe estar conectado al vehículo al utilizar la MDI.
• Asegúrese de que las conexiones del cable estén fi jas. Un cable desconectado PUEDE ocasionar una falla en el controlador.
• Cuando utilice una computadora portátil u otro dispositivo de visualización (PDA, etc.) para la programación Pass-thru (Directa), asegúrese de que el suministro de energía esté debidamente conectado. Si se enciende por AC y el cordón eléctrico se desconecta, se podría interrumpir la programación y ocasionar daños al módulo de control. Si la computadora portátil funciona con la fuente de energía interna (baterías), entonces asegúrese de que esté debidamente cargada para completar el proceso del SPS.
• El módulo que se programará se debe instalar en el vehículo antes de iniciar este proceso. Asegúrese de que la batería del vehículo esté totalmente cargada.

M18044.15B
Jefe de taller
Realización de la programación Pass-Thru (Directa)
La programación Pass-thru (Directa) requiere que la MDI permanezca conectada a la terminal y al vehículo durante todo el proceso de programación. El vehículo debe estar muy cerca de la terminal al utilizar la programación Pass-thru (Directa) (consulte la Figura VIIC-10).
IMPORTANTE:TIS 2 Web sólo es compatible con la Programación Pass-Thru (Directa) con la MDI.
Procedimiento de programación Pass-Thru (Directa)
1. Inicie TIS 2 Web.
2. Desde la pantalla principal de TIS 2 Web (Figura VIIC-11), seleccione el icono del Sistema de programación de servicio.
3. Conecte la MDI al vehículo y al dispositivo de visualización (por ej. PDA, pantalla de PC) (Figura VIIC-12):
• Encienda la MDI con el botón ON/OFF (encendido/apagado) (Figura VIIC-2).
• Con la llave en encendido y batería totalmente cargada.
• Seleccione “Start SPS” Iniciar el SPS (Figura VIIC-13).
• La versión del software del SPS aparecerá en la pantalla. (Figura VIIC-14). Si la pantalla del hardware no aparece, revise las conexiones del software. Este proceso podría demorar algún tiempo dependiendo de su conexión de Internet.
• Seleccione “Start SPS” Iniciar el SPS (Figura VIIC-15).
• Seleccione la Herramienta de diagnóstico (Figura VIIC-16) J2534 de MDI de GM.
• Seleccione el proceso de programación (Figura VIIC-17).
4. Seleccione “Next” (Siguiente) en la pantalla “Sales Make” (Marca de venta) (Figura VIIC-18).
Complete todos los datos dirigidos de la terminal hasta que aparezca resaltado Next (Siguiente) (los datos del vehículo variarán). Seleccione Next (Siguiente). Asegúrese de que aparezca el VIN correcto. Si el VIN es incorrecto o hace falta, ingrese el VIN correcto (Figura VIIC-19).
Booklet
Mayo 2009 A-4
Red de Cominicación en el Vehículo
Mayo 2009A-5
Módulos de Control
IMPORTANTEPara reducir la pérdida de señal potencial. La MDI se debe confi gurar en la opción de comunicación más estable de su ubicación. Puede escoger entre USB, Ethernet o Ethernet inalámbrica.
5. En la pantalla “Supported Controllers” (Controladores compatibles) (Figura VIIC-20):
• Seleccione el módulo de control adecuado en “Select Controller” (Seleccionar controlador) por ej. PCM / módulo de control del VCM, etc.
• Seleccione el tipo de programación adecuado (Figura VIIC-21) (Normal, VCI, o reconfi gurar).
• Seleccione Next (Siguiente). Para VCI o Reconfi gurar se deberá comunicar con su Centro de asistencia al cliente local.
IMPORTANTE
Al seleccionar el tipo de programación del índice de confi guración del vehículo (VCI), deberá ingresar un número válido de VCI para el vehículo. Este número se puede obtener a través del Centro de asistencia al cliente de Techline.
El tamaño de la llanta y la relación del eje correctos deben estar resaltados y debe ingresar un número válido de VCI, si selecciona la reconfi guración para su tipo de programación.
Seleccione Cancel (Cancelar) si recibe un mensaje que indica que la calibración seleccionada es la calibración actual del módulo de control y no se recomienda hacer una reprogramación con la misma descarga.
6. Durante la comunicación, aparecerá una pantalla para “validate /select vehicle data” (validar /seleccionar los datos del vehículo) (Figura VIIC-22)
7. En la pantalla Calibration Selection (Selección de calibración):
• Seleccione las calibraciones adecuadas (Figura VIIC-23).
• Asegúrese de que todas las fi chas de las carpetas tengan una marca de verifi cación verde.
• Seleccione Next (Siguiente).
8. En la pantalla Summary (Resumen): (Figura VIIC-24)
• Verifi que las calibraciones actuales con las calibraciones seleccionadas.
• Seleccione Next (Siguiente).

M18044.15B
Jefe de taller
• En la pantalla Summary (Resumen), se muestra la calibración actual junto con las nuevas calibraciones disponibles para el vehículo seleccionado. Las mejoras del diagnóstico se enumeran para varios DTC. Puede haber pantallas múltiples disponibles. Los datos de calibración se pueden imprimir desde estas pantallas.
• La pantalla Transfer Data (Transferencia de datos) aparece al iniciar la reprogramación y termina cuando la barra del porcentaje llega al 100 por ciento. El tiempo puede variar dependiendo de la calibración. (Figura VIIC-25). El tiempo de programación restante calculado aparecerá en la pantalla.
IMPORTANTEEn algunos vehículos será necesario realizar los procedimientos de Aprendizaje de ralentí, aprendizaje de TP, volver a aprender el sistema antirrobo o aprendizaje de variación del cigüeñal después de la programación. Consulte la información de servicio adecuada para estos procedimientos.
09. Aparece la pantalla “Programación completa” del controlador del programa (Figura VIIC-26).
10. Seleccione Cancel (Cancelar). Utilice “clear DTC’s” (Borrar los DTC) para borrar los datos históricos. El programa regresará a la pantalla principal de TIS 2 Web. Asegúrese de verifi car que la reprogramación tenga éxito. Consulte la Verifi cación de reprogramación en (página VI-8).
• Aparecerá un código de reclamo por garantía, si aplica.
• Se deberá hacer un reemplazo del módulo de calibración en el vehículo para que aparezca el código de reclamo.
Éstas pueden ser instrucciones específi cas del controlador o “Posteriores a la programación”, después que la programación fi nalice.
• En la pantalla Summary (Resumen), se muestra la calibración actual junto con las nuevas calibraciones disponibles para el vehículo seleccionado. Las mejoras del diagnóstico se enumeran para varios DTC. Puede haber pantallas múltiples disponibles. Los datos de calibración se pueden imprimir desde estas pantallas.
11. Apague la MDI al presionar el botón ON/OFF (encendido/apagado). Consulte la (Figura VIIC-2).
12. Desconecte la MDI del vehículo (Figura VIIC-10) para la desconexión.
Después de cualquier tipo de programación del módulo de control, verifi que que la programación haya tenido éxito:
Apague la ignición, espere por lo menos 30 segundos, luego arranque el vehículo para confi rmar que la reprogramación haya tenido éxito. Si el vehículo no repite el procedimiento del SPS.
Booklet
Mayo 2009 A-6

Red de Cominicación en el Vehículo
Mayo 2009A-7
Módulos de Control
La Interfaz de diagnóstico múltiple (MDI) es un dispositivo J2534 que se conecta entre su computadora y el conector DLC J1962 del vehículo para la programación Pass-thru (Directa) de la ECU del vehículo. La aplicación de confi guración J2534 se instala en su PC al mismo tiempo que el software del administrador de MDI, permitiéndole controlar cómo la aplicación TIS 2 Web se conectará a una MDI. Además, esta aplicación proporciona controles de supervisión API para ayudar a investigar los problemas encontrados mientras se utiliza cualquier dispositivo J2534 (incluyendo la MDI).
Para iniciar la Aplicación de confi guración J2534 desde el SPS, presione el botón “confi guration” (confi guración) en la pantalla Confi guraciones de diagnóstico.
La aplicación de confi guración J2534
CONFIGURACIÓN DEL DISPOSITIVO
Los controles de Confi guración del dispositivo le permiten defi nir una MDI predeterminada y una secuencia de conexión que su aplicación TIS 2 Web seguirá para conectarse a sus MDI.
Existen dos controles en esta área: el control del Dispositivo predeterminado y el control Orden de conexión automática.
Control del dispositivo predeterminado
El cuadro de texto Dispositivo predeterminado le permite escribir el número de serie de la MDI que desea defi nir como su dispositivo predeterminado.
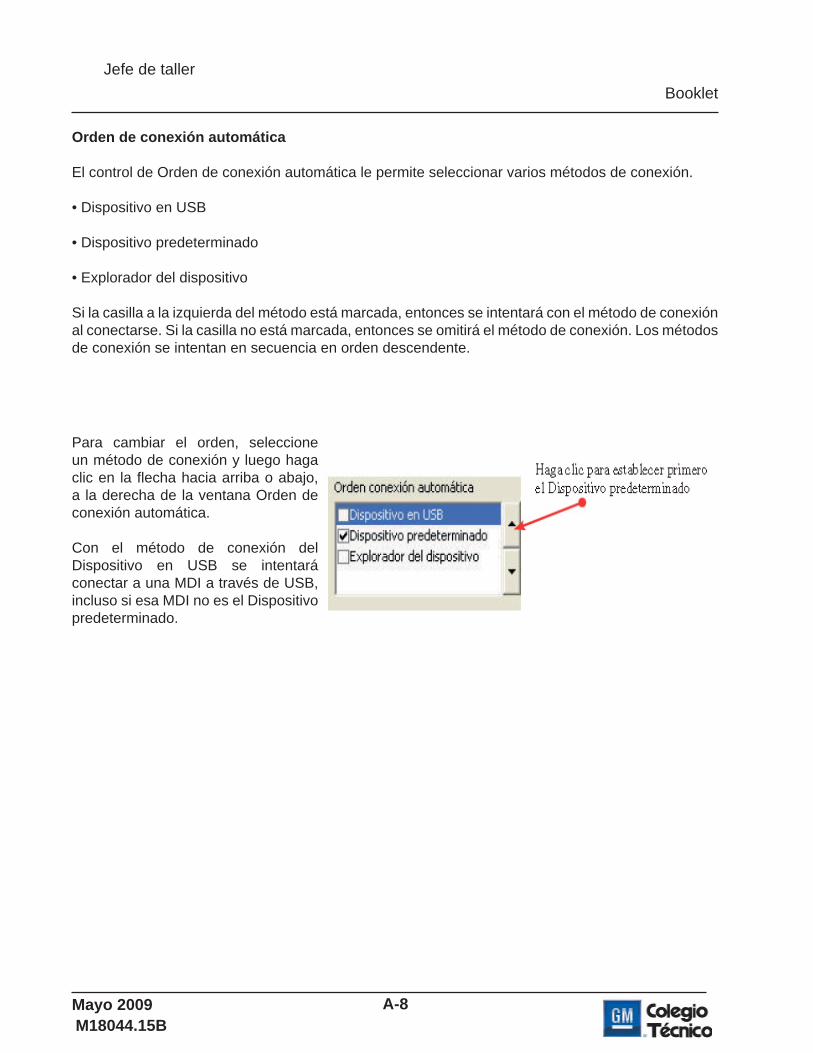
M18044.15B
Jefe de taller
Orden de conexión automática
El control de Orden de conexión automática le permite seleccionar varios métodos de conexión.
• Dispositivo en USB
• Dispositivo predeterminado
• Explorador del dispositivo
Si la casilla a la izquierda del método está marcada, entonces se intentará con el método de conexión al conectarse. Si la casilla no está marcada, entonces se omitirá el método de conexión. Los métodos de conexión se intentan en secuencia en orden descendente.
Para cambiar el orden, seleccione un método de conexión y luego haga clic en la fl echa hacia arriba o abajo, a la derecha de la ventana Orden de conexión automática.
Con el método de conexión del Dispositivo en USB se intentará conectar a una MDI a través de USB, incluso si esa MDI no es el Dispositivo predeterminado.
Booklet
Mayo 2009 A-8

Red de Cominicación en el Vehículo
Mayo 2009A-9
Módulos de Control
Con el método de conexión del Dispositivo predeterminado se intentará conectar a un Dispositivo predeterminado (MDI) por medio de las primeras conexiones disponibles en el orden siguiente: USB, Ethernet con cable y luego inalámbrica.
El método de conexión del Explorador del dispositivo abre el cuadro de diálogo que se muestra a continuación, si se detectan las MDI.
Las MDI que no están disponibles, estarán marcadas con una X roja y no se podrán seleccionar. Las MDI que están disponibles, se pueden seleccionar de distintas maneras.
• Puede dar clic con el botón secundario en una MDI y hacer su selección de las conexiones disponibles (USB, Ethernet con cable o inalámbrica).
• Puede seleccionar una MDI y presionar el botón Connect (Conectar).La estrategia de conexión automática se conectará utilizando las primeras conexiones disponibles en el orden siguiente: USB, Ethernet con cable y luego inalámbrica.
• Puede dar clic con el botón secundario en una MDI y hacer su selección de las conexiones disponibles.
• También puede dar clic con el botón secundario en una MDI y establecerla como el Dispositivo predeterminado.
El botón Cancel (Cancelar) cerrará el cuadro de diálogo sin hacer una conexión.

M18044.15B
Jefe de taller
Conexión a una MDI desde las aplicaciones TIS 2 Web
Con la estrategia de conexión automática se intentará conectar utilizando el primer método disponible en el orden de conexión automática: Si una MDI no está disponible al utilizar ese método, la estrategia de conexión automática pasará al siguiente método en el orden de conexión automática: Si ninguno de los métodos de conexión encuentra una MDI disponible, la aplicación TIS 2 Web mostrará un mensaje de error.
Uso de múltiples MDI desde las aplicaciones TIS 2 Web
Sólo se puede conectar a una MDI única al mismo tiempo, pero posiblemente desee conectar varias MDI en sucesión.
Cuando termine de utilizar una MDI, inicie la Aplicación de confi guración J2534 (generalmente puede hacer esto, estando dentro de su aplicación TIS 2 Web).
Verifi que que el orden de conexión automática le permita seleccionar una MDI diferente; una manera de hacer esto es seleccionar sólo el Explorador del dispositivo, como se mostró anteriormente.
Después haga clic en Apply (Aplicar).
Ahora puede regresar a su aplicación TIS 2 Web y seleccionar cualquier MDI en el cuadro de diálogo Device Explorer (Explorador del dispositivo).
Booklet
Mayo 2009 A-10
Red de Cominicación en el Vehículo
Mayo 2009A-11
Módulos de Control
Si tiene algún problema
Esta sección pretende ayudarlo a continuar trabajando, si la MDI parece funcionar anormalmente.
Además, se establece la causa más probable de la condición así como otras posibles causas y recomendaciones sobre cómo aislar o eliminar el problema. Si el problema no se aísla o elimina al utilizar estas instrucciones, consulte la Información general de asistencia al cliente.
LA MDI NO PASA LA AUTOPRUEBA (POST)
Causa más probable
• Problema interno en la MDI.
Recomendaciones
• Conecte la MDI a una PC con USB y lleve a cabo el procedimiento de recuperación del software.
Consulte la Recuperación de software del comprobador de MDI.
• Comuníquese con el Centro de asistencia al cliente.
EL DIODO FOTOEMISOR DE ERROR DE MDI SE ENCIENDE DESPUÉS QUE ENCIENDE LA UNIDAD
Esto indica que se ha detectado un problema durante el encendido.
Recomendaciones
• Apague la MDI y verifi que que ocurra el mismo problema al volver a encenderla.
• Conecte la MDI a una PC con USB y lleve a cabo el procedimiento de recuperación del software.
Consulte la Recuperación de software del comprobador de MDI.
• Comuníquese con el Centro de asistencia al cliente.

M18044.15B
Jefe de taller
LA MDI NO SE ENCIENDE
La MDI se debe encender tan pronto como la energía externa se aplica. Si la MDI no se enciende, primero revise el contacto o las conexiones del cable eléctrico. Intente suministrar energía a la MDI desde dos fuentes de energía diferentes, el conector DLC del vehículo y el adaptador de 12 voltios de AC.
Recomendaciones
• Revise que los cables estén debidamente conectados a la MDI y que las clavijas del conector estén limpias.
• Si hace la conexión con el conector DLC del vehículo, intente encender la unidad desde el adaptador de 12 voltios de AC.
• Si hace la conexión con el adaptador de 12 voltios de AC, intente encender la unidad desde el conector DLC del vehículo.
• Verifi que la energía en el conector DLC y adaptador de 12 voltios de AC.
Si la MDI todavía no se enciende, es probable que la MDI tenga un problema. Comuníquese con el Centro de asistencia local.
LA MDI SE APAGA DE INMEDIATO AL DESCONECTARLA DEL VEHÍCULO
La MDI debe permanecer encendida durante un período establecido desde la fábrica (con las baterías instaladas) después que se desconecte de la energía (DLC del vehículo o adaptador de 12 voltios de AC) a menos que presione el botón power (encendido).
Recomendaciones
• Apague la MDI y verifi que que ocurra el mismo problema al volver a apagarla.
• Reemplace las baterías y asegúrese de instalarlas correctamente.
Si la MDI todavía no se enciende como es debido, es probable que la MDI tenga un problema. Comuníquese con el Centro de asistencia al cliente.
Booklet
Mayo 2009 A-12

Red de Cominicación en el Vehículo
Mayo 2009A-13
Módulos de Control
TIS 2 WEB MUESTRA UN MENSAJE QUE INDICA QUE LA MDI NO SE COMUNICA CON EL VEHÍCULO
• Consulte la documentación de TIS 2 WEB para obtener una guía de solución de problemas.
TIS 2 WEB NO RECONOCE MI MDI
• Asegúrese de que el software del administrador de MDI esté instalado en la PC y que la MDI tenga la versión de software más reciente.
• Si el software del administrador de MDI se está ejecutando, asegúrese de que no esté conectado a la MDI.• Revise la conexión de su MDI al utilizar la funcionalidad de ‘Conexión de prueba’ del SPS.• Utilice el software del administrador de MDI para asegurarse de que su MDI se muestre en la fi cha del Explorador de MDI. Verifi que si se puede conectar a su MDI con éxito.a. Asegúrese de que intenta conectarse a la MDI correcta al verifi car que el número de serie, que se muestra en la fi cha del Explorador de MDI, es el correcto para su MDI.b. Asegúrese de que la MDI todavía no esté conectada a otra PC.• Utilice la Aplicación de confi guración J2534 para establecer el Orden de conexión automática en solamente Explorador del dispositivo, con el fi n de seleccionar su MDI. Consulte Uso de múltiples MDI desde las aplicaciones TIS 2 Web.
EL SOFTWARE DEL ADMINISTRADOR DE MDI EN LA PC NO SE PUEDE COMUNICAR CON LA MDI
El software del administrador de MDI se debe instalar en la PC y la MDI se debe encender antes de que se comunique por medio de la conexión USB. La MDI también se debe confi gurar para utilizarla con Ethernet con cable o inalámbrica, antes de que se comunique con cualquiera de las dos. La MDI se conectará primero con USB, si está disponible; si USB no está disponible, la MDI se conectará con la Ethernet con cable; si USB y la Ethernet con cable no están disponibles, la MDI se conectará con la Ethernet inalámbrica.

M18044.15B
Jefe de taller
El siguiente procedimiento muestra cómo acceder a la funcionalidad de “Conexión de prueba” del SPS.
1. Desde la pantalla SPS principal, seleccione el botón ‘Settings’ (Confi guraciones) para mostrar la ventana de confi guraciones.
La siguiente pantalla aparece, si el SPS no se puedecomunicar con la MDI
2. Desde la pantalla ‘Settings’ (Confi guraciones), seleccione la fi cha ‘Diagnóstico’.
3. Desde el menú desplegable, seleccione ‘MDI J2534’ y luego presione el botón ‘Test Connection’ (Conexión de prueba).
La siguiente pantalla aparece, si el SPS no se puedecomunicar con la MDI
Booklet
Mayo 2009 A-14

Red de Cominicación en el Vehículo
Mayo 2009A-15
Módulos de Control
Recomendaciones
• Revise que los cables estén fi rmemente conectados a la MDI. La MDI ha completado su secuencia de encendido, las clavijas del conector están limpias y el software del administrador de MDI está funcionado.
• Si se conecta con USB, revise que Windows detecte la conexión USB de MDI.
a. Conecte la MDI al puerto USB de PC, luego encienda la MDI.b. Desde el Panel de control de Windows, abra la ventana de Conexiones de marcado y de red.c. Revise que el nombre del dispositivo sea Dispositivo de red NDIS remoto de USB ETAS. Si no funciona, entonces la unidad USB no se ha cargado en la PC o la MDI no está encendida ni conectada a USB. Revise todos los puertos USB de la PC y verifi que que la MDI esté encendida.
• Si se conecta por medio de Ethernet inalámbrica, asegúrese de que la comunicación inalámbrica esté activada y que la confi guración de IP esté bien establecida con el software del administrador de MDI.
a. Verifi que que el cable USB no esté conectado. La conexión USB antecede a la inalámbrica.b. Revise que la MDI no se utilice con la Ethernet con cable. La conexión Ethernet con cable antecede a la inalámbrica.c. Verifi que que la tarjeta inalámbrica esté debidamente colocada en la MDI.d. Comuníquese con el departamento IT y revise que su PC detecte el punto de acceso inalámbrico y que las confi guraciones de seguridad correctas se hayan confi gurado para la MDI.
• Si se conecta con la Ethernet con cable, asegúrese de que la comunicación de Ethernet con cable esté activada y confi gurada para utilizar el software del administrador de MDI.
a. Verifi que que el cable USB no esté conectado. La conexión USB antecede a la de Ethernet con cable.b. Revise que el dispositivo de MDI detecte la actividad de Ethernet con cable al observar las luces que se encienden intermitentemente en el puerto de Ethernet con cable de la MDI.c. Comuníquese con el departamento IT y revise que la MDI y la PC no estén en la misma subred.
• Comuníquese con el departamento IT para corregir la confi guración de MDI de GM.
• Comuníquese con su centro de asistencia al cliente local.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-16

Red de Cominicación en el Vehículo
Mayo 2009A-17
Módulos de Control

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-18
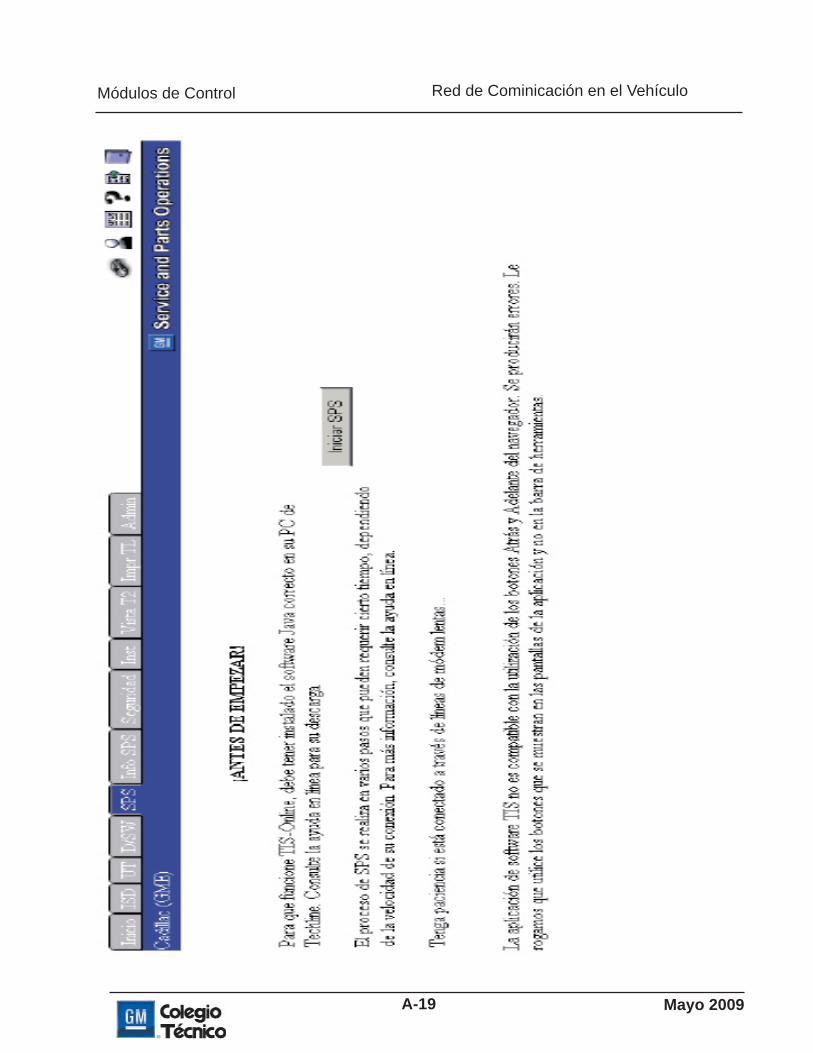
Red de Cominicación en el Vehículo
Mayo 2009A-19
Módulos de Control

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-20
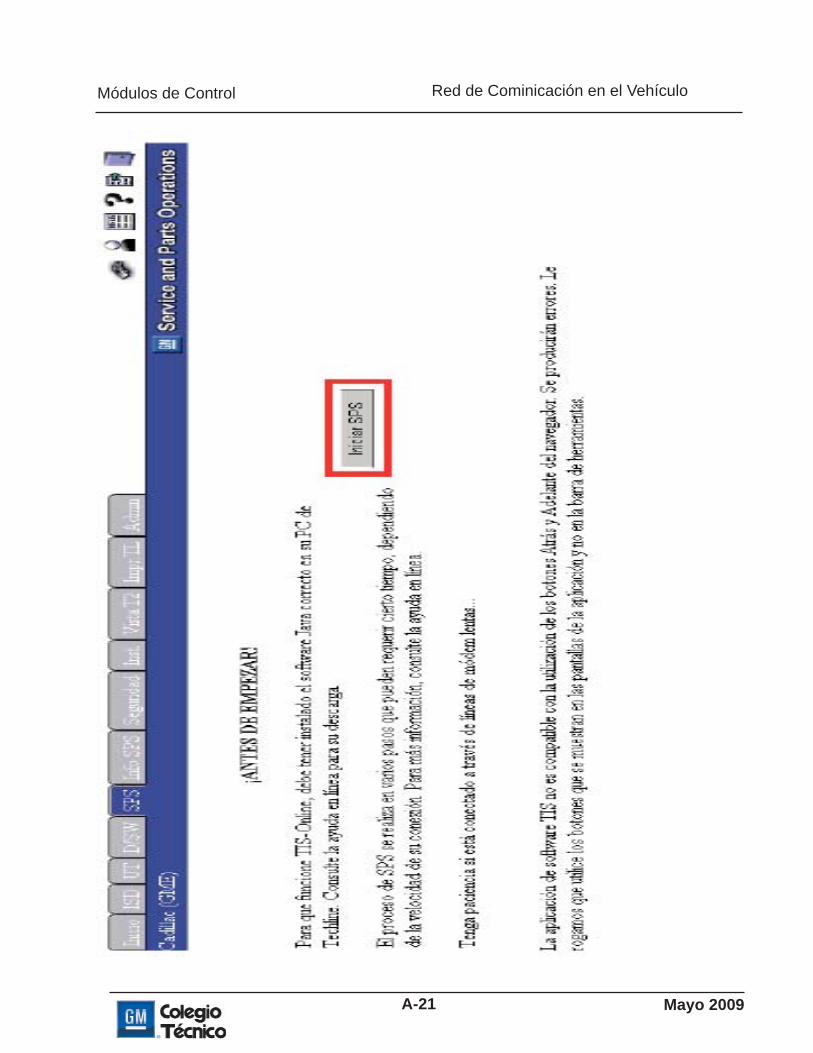
Red de Cominicación en el Vehículo
Mayo 2009A-21
Módulos de Control

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-22

Red de Cominicación en el Vehículo
Mayo 2009A-23
Módulos de Control

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-24
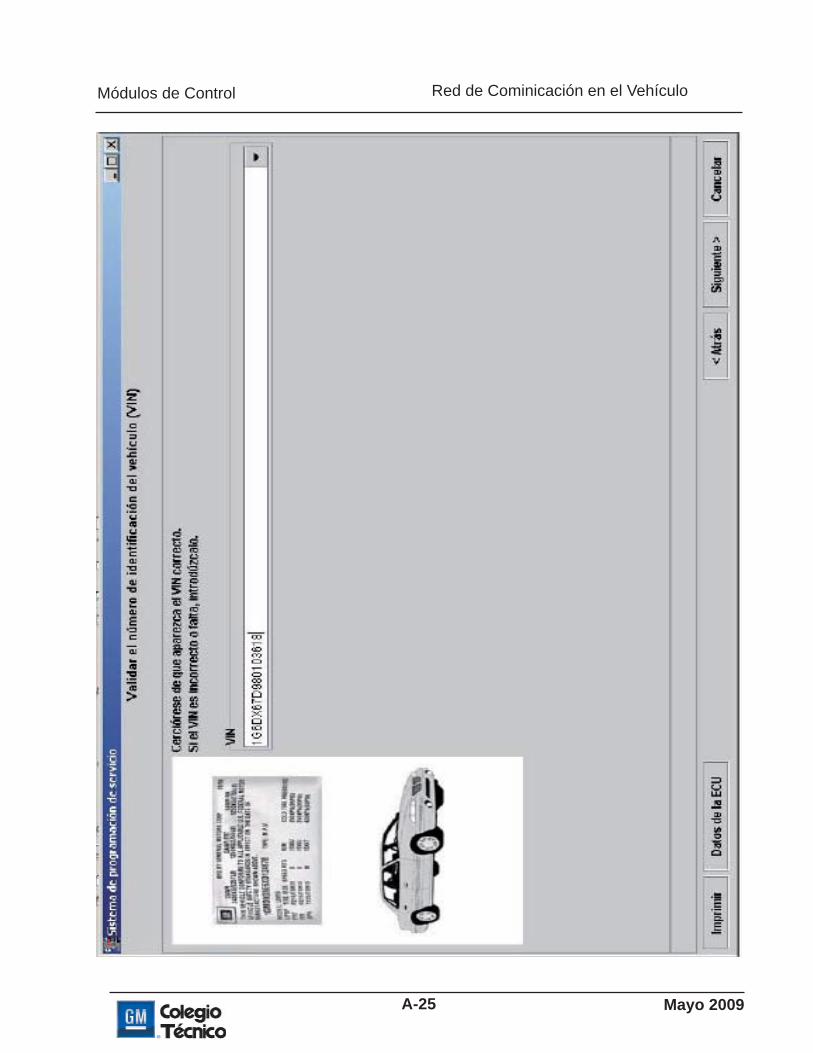
Red de Cominicación en el Vehículo
Mayo 2009A-25
Módulos de Control

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-26

Red de Cominicación en el Vehículo
Mayo 2009A-27
Módulos de Control

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-28

Red de Cominicación en el Vehículo
Mayo 2009A-29
Módulos de Control
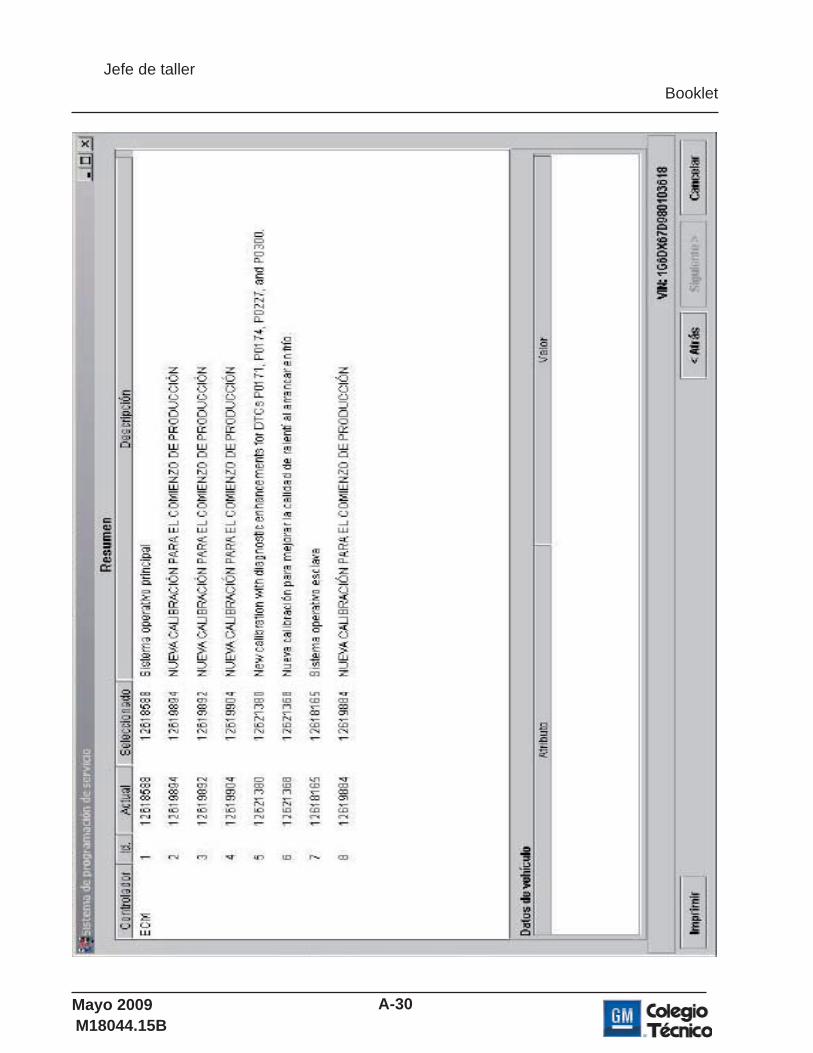
M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-30

Red de Cominicación en el Vehículo
Mayo 2009A-31
Módulos de Control

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-32

Red de Cominicación en el Vehículo
Mayo 2009A-33
Módulos de Control
Sistema de programación de servicio (SPS) Tech 2
El sistema de programación de servicio (SPS) actualiza los archivos de calibración “fl ash” que están almacenados en el controlador de abordo del vehículo (por ej. PCM, ABS, VTD). El archivo de calibración está hecho a la medida para cada módulo de vehículo. El archivo de calibración contiene información para temas tales como curvas de encendido y control de combustible. Cuando se trata de resolver una condición de conducción, el diagnóstico del vehículo puede indicar que se debería de reprogramar el controlador con una información de calibración más actual para así corregir la queja que reporta el cliente.
El controlador del módulo de control del motor de la cadena cinemática puede utilizarse para cuatro tipos de datos en serie:
• UART (transmisor y receptor asíncrono universal)
• Clase 2
• Palabra clave
• CAN – GM LAN (aplicación de comunicaciones reciente disponible sólo para aplicaciones limitadas)

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-34
Número VCI (índice de confi guración del vehículo)
El índice de confi guración del vehículo (VCI) es un número que representa una combinación válida de piezas y sistemas de un vehículo, incluido el equipamiento opcional. La división GM Service and Parts Operations utiliza los números VCI para identifi car una calibración específi ca o un grupo de calibraciones específi co.
Necesitará un número VCI para acceder a las calibraciones del vehículo cuando vuelva a ejecutar la programación siempre que el número de identifi cación del vehículo (VIN) no sea parte de los datos del sistema TIS, según el tipo de vehículo, si se ha confi gurado según las especifi caciones originales.
Tenga en cuenta que las calibraciones para volver a confi gurar vehículos (añadir/modifi car opciones, como, por ejemplo, luces antiniebla) se pueden seleccionar en el sistema TIS y no se necesita ningún número VCI.
Si el número VIN no forma parte de los datos del sistema TIS que se estén cargando, aparecerá un mensaje de error del sistema TIS que indica que el número VIN no es correcto o que es necesario suministrar un número VCI. En este caso, asegúrese que se haya cargado la versión de software adecuada en el terminal.
Para comprobar qué versión de sistema TIS se está utilizando, seleccione el menú de ayuda, seleccione la ayuda principal del sistema TIS y, a continuación, seleccione la opción de Acerca de TIS. Aparecerá la versión actual de los datos junto con la versión de punto de bloqueo para operaciones realizadas en América del Norte (fi gura VIIC-1).
El número VCI también le permite programar un vehículo que se haya vuelto a confi gurar a partir de su confi guración original. Esto incluye modifi caciones en los tamaños de los neumáticos y en las relaciones de los ejes. Cuando seleccione Reconfi gure (Reconfi gurar) desde la pantalla “Supported Controllers” (Controladores admitidos) en el sistema TIS, se mostrarán sólo como información las calibraciones que admitan varias confi guraciones. Para acceder a dichas calibraciones, necesitará un número VCI.
Dicho número VCI le permite acceder a todas las últimas calibraciones disponibles para el vehículo basándose en su número VIN correspondiente.
El número VCI no le permite acceder a las calibraciones diseñadas como “Not Selectable” (No seleccionable). Es importante asegurarse de que dispone del número VCI correcto para acceder a las calibraciones antes de volver a efectuar las programaciones.

Red de Cominicación en el Vehículo
Mayo 2009A-35
Módulos de Control
Selección de la calibración adecuada
Cuando vuelva a programar un vehículo, la selección de la calibración adecuada es crucial. Sólo podrá ver las calibraciones válidas para el número VIN que se haya introducido. Asegúrese de consultar el historial de cada una de las calibraciones. El historial muestra una explicación del archivo de calibración. Asimismo, ofrece información de para qué sirve la calibración y si prevalece sobre otras calibraciones. Puede resultar de gran utilidad leer los últimos boletines de información. De esta forma, dispondrá de información actualizada sobre la razón de las últimas versiones de las calibraciones. A veces, los números de los boletines relacionados se suministran con los archivos de calibración.
Según el historial de calibración y los boletines, seleccione el archivo de calibración más adecuado.
Para muchos de los vehículos equipados con módulos de control del vehículo (VCM), también necesitará completar varias selecciones de fi cha. Cada fi cha corresponde a un archivo de calibración contenido en el VCM. Si aparece una casilla de verifi cación no seleccionada en la fi cha del sistema, indicará que no se ha realizado ninguna selección necesaria.
Si necesita un número VCI, póngase en contacto con el Centro de atención al cliente Techline (TCSC).
Cuando disponga del número VCI, deberá introducirlo en la pantalla de introducción de datos cuando lo solicite el sistema de programación de servicio (SPS).
Los cuatro métodos principales de SPS son:
• Programación remota
• Programación pass-thru
• Programación remota off-board (fuera del vehículo)
• Programación pass-thru off-board (fuera del vehículo)
Para obtener una representación completa de las pantallas de la interfaz de la herramienta Tech 2 mientras utilice el sistema de programación de servicio de forma remota, consulte el apartado de funciones y pantallas de la interfaz de usuario del sistema SPS de la herramienta Tech 2.
Independientemente del vehículo, el procedimiento de programación SPS general consta de tres partes. Dicho proceso consiste en los siguientes pasos:
1. Comprobación del módulo de control del vehículo. De esta forma podrá determinar qué archivo de calibración tiene almacenado actualmente, si es que existe alguno.
2. Determinación de si es necesaria una actualización.
3. Transferencia de los datos seleccionados al módulo de control del vehículo.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-36
ATENCIONAntes de llevar a cabo el procedimiento SPS, es importante tener en cuenta las siguientes precauciones:• La utilización de una versión obsoleta podría dañar los módulos de los vehículos. La herramienta Tech 2 y el terminal utilizados deben estar equipados con la última versión del software disponible.• Asegúrese de que la batería del vehículo está completamente cargada. El voltaje de la batería para realizar SPS deberá estar entre 12 y 14 voltios. Asegúrese de que ningún cargador de batería esté conectado al vehículo mientras se utiliza la herramienta Tech 2.• Asegúrese de que las conexiones del cable son seguras. Un cable desconectado puede causar un fallo en el módulo.• Si se utiliza un ordenador portátil para la programación mediante transferencia de datos, asegúrese de que la alimentación esté conectada correctamente, ya que si se utiliza una fuente de alimentación de CA y se desconecta el cable de alimentación, se podría interrumpir la programación y provocar, por tanto, daños al módulo de control. Si el ordenador portátil se está utilizando con su propia fuente de energía (batería), asegúrese de que la carga de dicha fuente de alimentación sea sufi ciente como para completar el proceso de SPS.
Programación remota SPS
El método de programación remota es un proceso de tres pasos que requiere:1. Conectar la herramienta de exploración Tech 2 al vehículo para obtener información del módulo.2. Transferir los datos del módulo al Tech 2. 3. Reconectar la herramienta Tech 2 al vehículo y cargar en el módulo nuevo el archivo de calibración.
IMPORTANTE:El sistema TIS sólo admite la programación de servicio con el Tech 2.
Programación fuera del vehículo
La programación fuera del vehículo se utiliza cuando es necesario programar un módulo de control reprogramable fuera del vehículo. Este método requiere la utilización de un adaptador de programación fuera del vehículo (OBPA), J-41207-C.

Red de Cominicación en el Vehículo
Mayo 2009A-37
Módulos de Control
Realizando SPS remota
ATENCIONAntes de iniciar el proceso, la unidad de control electrónico (ECU) debe estar instalada en el vehículo. Asegúrese que la batería esté cargada.
Para realizar SPS remota utilizando TIS siga los pasos que se indican a continuación:
PASO 1: Obtenga la información del vehículo (Solicitar Info.) de la nueva ECU o de la ECU que se vaya a reprogramar.
1.1 Con el Tech 2 y el vehículo apagados, conecte el Tech 2 al DLC del vehículo (fi gura III-23).
1.2 Encienda el Tech 2. Cuando aparezca la pantalla de título del Tech 2 presione la tecla ENTER.
1.3 Gire la ignición del vehículo a la posición “on” con el motor apagado.
1.4 En la pantalla del menú principal del Tech 2, seleccione Sistema Programación de Servicio (fi gura VIIC-13).
1.5 Seleccione “Solicitar Información” en el Tech 2 (fi gura VIIC-14).
IMPORTANTESi se ha almacenado un número VIN (número de identifi cación del vehículo - NIV) en la herramienta Tech 2, pulse la tecla Solicite Nueva Información y siga las instrucciones que aparezcan en la pantalla.
1.6 Siga las instrucciones que aparezcan en la pantalla. Una vez introducida la descripción del vehículo, desconecte todos los dispositivos que estén conectados a la alimentación y pulse la tecla Continuar.
1.7 La herramienta Tech 2 leerá el número VIN y, a continuación, lo mostrará junto con las calibraciones correspondientes. El Tech 2 preguntará “¿Es correcto el VIN?” Seleccione Sí. (Si la respuesta es No, anote el número VIN.)
1.8 Cuando haya acabado, presione [EXIT], apague el Tech 2 y desconéctelo del vehículo. Gire la ignición del vehículo a la posición “off.”

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-38
PASO 2: Transferencia de datos del terminal al Tech 2
2.1 Conecte el Tech 2 al terminal tal como se indica en la fi gura VIIB-4.
2.2 En el terminal, dé comienzo a la aplicación TIS.
2.3 Desde la pantalla principal de TIS (fi gura VIIB-2), seleccione el icono Sistema de programación de servicio.
2.4 En la pantalla Seleccionar herramienta de diagnosis y proceso de programación (fi gura VIIIC-2), realice la selección apropiada para su procedimiento:
• Bajo “Seleccionar herramienta de diagnosis,” seleccione Tech 2.[Para obtener las calibraciones de un vehículo concreto sin utilizar la herramienta Tech 2 o para obtener los datos PROM de vehículos que no se puedan programar, tendrá que solicitar la opción Information Only/PROM data (Sólo información/Datos PROM). Seleccione la opción Pass-Thru (Transferencia de datos) para llevar a cabo la programación SPS sin que sea necesario desconectar el equipo del vehículo o del terminal.]
• En “Select Programming Process” (Seleccionar proceso de programación) seleccione Reprogram ECU (Reprogramar ECU) o Replace and Program ECU (Sustituir y programar ECU), según si desea volver a programar un módulo ya existente o si desea sustituir un módulo completo.
• En “Select ECU Location” (Seleccionar ubicación de ECU), seleccione la opción Vehicle o la opción Off Board Programming Adapter (OBPA) (Adaptador de programación fuera del vehículo, OBPA) dependiendo de si ejecuta una programación en el vehículo o fuera del vehículo.
2.5 Tras realizar las selecciones seleccione Siguiente.
2.6 Confi rme las conexiones y seleccione Siguiente en la pantalla Preparando para la comunicación (fi gura VIIC-3).
IMPORTANTESi contestó NO al VIN en paso 1.7, es posible que aparezca un cuadro con el mensaje “La ECU podría ser ECU de servicio.” Haga clic en Aceptar

Red de Cominicación en el Vehículo
Mayo 2009A-39
Módulos de Control
2.7 Aparecerá la pantalla Validate VIN (Validar VIN) (fi gura VIIC-4). Asegúrese que el VIN es igual al del vehículo, sino introduzca el VIN correcto y seleccione Siguiente.
2.8 Una pantalla de Controladores incluidos (fi gura VIIC-5) aparecerá, pidiéndole que identifi que el tipo de controlador a programar. Puede que algunos vehículos tengan más de un controlador programable — ejemplos incluyen PCM, BCM, IPC. Seleccione el controlador apropiado para el vehículo al cual está dando servicio.
Tras seleccionar el tipo de controlador a programar, identifi que el tipo de programación a realizar.
• Normal se utilizará para actualizar una calibración existente o para programar un nuevo controlador.
• Para vehículos más nuevos cuyos VINs no se encuentran todavía en la base de datos, VCI (índice de confi guración del vehículo) se utilizará para actualizar un controlador existente o para programar un nuevo controlador. Para estos vehículos deberá ponerse en contacto con el centro de asistencia técnica (TAC).
• Reconfi gurar se utilizará para reconfi gurar vehículos, tales como camiones, para cambios en el tamaño de llanta o relación de eje.
2.9 Tras realizar las selecciones seleccione Siguiente.
IMPORTANTECuando los boletines aparezcan junto con los archivos de calibración, consulte los boletines de servicio antes de llevar a cabo la programación de servicio.
IMPORTANTESeleccione Cancelar si obtiene un mensaje indicando que la calibración seleccionada es la calibración actual del módulo de control y que no es posible llevar a cabo la reprogramación con las mismas calibraciones de software.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-40
2.10 Una pantalla de selección de calibración aparecerá mostrando la historia de los archivos de calibración para el vehículo o controlador al cual se está dando servicio. La pantalla muestra una descripción de cada archivo de calibración. Seleccione el archivo apropiado en base a estas descripciones.• Vehículos con PCMs desplegarán una pantalla similar a la que se encuentra en la fi gura VIIC-6.
Tiene una sola “lengüeta” que resume todos los archivos de calibración para el vehículo.• Vehículos con VCMs desplegarán una pantalla similar a la que se encuentra en la fi gura VIIC-7.
Contiene múltiples “lengüetas” — una para cada calibración distinta contenida en el VCM. Para estos vehículos hay que hacer una selección para cada lengüeta. De lo contrario, el sistema desplegará el mensaje que se muestra en la fi gura VIIC-8 indicando que no se han realizado todas las selecciones. (Note los recuadros sin marcas en las lengüetas “motor” y “hvac.”)
Los siguientes iconos aparecen en la pantalla de selección de calibración:
• Un círculo con una barra cruzada (O) indica que un archivo no es seleccionable.• Un recuadro sin ninguna marca ( ) indica que el archivo es seleccionable.• Un recuadro con una marca en su interior ( ) indica que se ha seleccionado un fi chero u opción válido.• En caso que se enlisten boletines de servicio junto con archivos de calibración, se debe de hacerreferencia a los boletines antes de realizar la programación de servicio.
A continuación seleccione Siguiente.
2.11 Tras realizar las selecciones necesarias, aparecerá una pantalla resumen (fi gura VIIC-9) que le permitirá confi rmar su selección. Para continuar seleccione Siguiente.Nota: Si las calibraciones son las mismas, aparecerá un cuadro de control NAODRUI (fi gura VIIC-10) indicando que la calibración seleccionada es la calibración actual del módulo de control. Haga clic en Aceptar y salga, o haga clic en Cancelar en la pantalla de Resumen.
2.12 La aplicación iniciará la descarga del nuevo archivo de calibración a la herramienta Tech 2 de forma automática y aparecerá la pantalla Transferir datos (fi gura VIIC-11) indicando el progreso de la descarga.
2.13 Una vez la descarga del archivo ha terminado, aparecerá una pantalla de Controlador de programa (fi gura VIIC-12) con instrucciones para conectar el Tech 2 al vehículo para completar la programación.Cierre la aplicación para volver a la pantalla de selección de aplicación de TIS, a continuación apague y desconecte el Tech 2 del terminal.Instrucciones especiales del aparato de mando.Si “El procedimiento de reaprendizaje de variación de posición del cigüeñal” aparece bajo“Instrucciones especiales del aparato de mando,” es necesario llevar a cabo el procedimiento.Diríjase al DTC P1336 o P315CKP en el Manual de servicio (Sistema de variación no aprendido)para este procedimiento.

Red de Cominicación en el Vehículo
Mayo 2009A-41
Módulos de Control
PASO 3: Transferencia de datos del Tech 2 al módulo de control
3.1 Con el Tech 2 y el vehículo apagados, conecte el Tech 2 al DLC del vehículo (fi gura III-23).
3.2 Encienda el Tech 2. Cuando aparezca la pantalla de título del Tech 2 presione la tecla ENTER.
3.3 Gire la ignición del vehículo a la posición “on” (motor apagado).
3.4 En la pantalla del menú principal del Tech 2, seleccione Sistema Programación de Servicio (fi gura VIIC-13).
3.5 Seleccione “F1: Programación del vehículo” en el Tech 2 (fi gura VIIC-22). El Tech 2 desplegará los datos de nueva programación — el VIN y los números del software (fi gura VIIC-23). Verifi que los números y pulse la tecla de función Continuar. El Tech 2 desplegará la pantalla “Programación en Proceso - Descargando archivo de calibración” (fi gura VIIC-24).
3.6 Cuando se ha completado la transferencia, el Tech 2 desplegará el mensaje “Programación Satisfactoria”
Pulse la tecla de función Continuar para abandonar el programa. A continuación gire la ignición del vehículo a la posición “off,” apague el Tech 2 y desconéctelo del DLC del vehículo.
Asegúrese de comprobar que la reprogramación se ha llevado a cabo con éxito. Consulte las recomendaciones que se incluyen en la página siguiente.
Verifi cando reprogramación
Tras la programación de cualquier módulo de control, verifi que que la programación ha sido satisfactoria:
Gire la ignición en la posición “off,” espere al menos 30 segundos y entonces encienda el vehículo para confi rmar que la reprogramación ha sido satisfactoria. Si el vehículo no se enciende o se enciende pero funciona un poco bruscamente, repita el proceso SPS.
IMPORTANTEAlgunos vehículos requieren que los procedimientos de aprendizaje del ralentí, aprendizaje del TP, reaprendizaje del antirrobo y aprendizaje de la variación del cigüeñal se realicen tras realizar la programación. Consulte la información en el manual de servicio apropiado para más informaciónsobre estos procedimientos.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-42
Funciones y pantallas de la interfaz de usuario SPS de Tech 2Descripción general
Esta sección es una representación de la aplicación de la pantalla de interfaz de usuario Sistema de programación de servicio (SPS) de Tech 2. A continuación se muestran las pantallas de la interfaz de usuario que pueden aparecer durante la ejecución de la SPS remota en la herramienta Tech 2.
La pantalla de información del Tech 2 se compone de dos secciones: Solicitud de información yProgramación. Siga los pasos necesarios para llevar a cabo la SPS remota con la herramienta dediagnosis Tech 2 y el software del sistema TIS.
Solicitud de información
1. En la pantalla de título del Tech 2, seleccione [ENTER]. Para ejecutar la aplicación SPS, pulse la tecla F1 en la herramienta Tech 2 o resalte la opción Sistema Programación de Servicio en la pantalla del menú principal (fi gura VIIC-13). A continuación, pulse [ENTER].
2. En la pantalla Solicitar información (fi gura VIIC-14), pulse F0 o [ENTER].Nota: La ECU que se va a programar debe instalarse antes de solicitar información.
3. En la pantalla Marcas de venta (fi gura VIIC-15), resalte una de las marcas de venta y pulse [ENTER].
Nota: La información que no se introduzca correctamente puede dar lugar a errores de programación.
4. En la pantalla Año(s) del modelo (fi gura VIIC-16), resalte el año correcto y, a continuación, pulse [ENTER].
5. En la pantalla Tipo(s) de vehículo(s) (fi gura VIIC-17), resalte el tipo de vehículo y, a continuación,pulse [ENTER].
6. En la pantalla Identifi cación del vehículo (fi gura VIIC-18), resalte el tipo de vehículo y, a continuación, pulse [ENTER]. Nota: Algunos modelos de vehículos pueden tener más opciones de pantallas.
7. La fi gura VIIC-19 muestra una pantalla de procedimiento del Tech 2. Siga las instrucciones queaparezcan en la pantalla. De lo contrario, pueden producirse errores de programación. Después deseguir dichas instrucciones, pulse la tecla de función Continuar.
8. La pantalla Datos existentes del vehículo (fi gura VIIC-20) muestra un número VIN y un número onúmeros de calibración de software. También pregunta si el VIN es correcto. Seleccione Sí o No con las teclas del Tech 2. En este ejemplo se selecciona Sí. Nota: Si selecciona No, siga todas las instrucciones de la pantalla. Después de ir al PC, siga con el paso 10.
9. La fi gura VIIC-21 muestra otra pantalla de Tech 2 de Datos existentes del vehículo. Siga los pasos que se indican en la pantalla: Desconecte el encendido. Desconecte el Tech 2 del vehículo y conéctelo al PC.

Red de Cominicación en el Vehículo
Mayo 2009A-43
Módulos de Control
Programación
10. Después de descargar la información del PC al Tech 2, regrese al vehículo. En la pantalla de título del Tech 2, seleccione [ENTER]. Para ejecutar la aplicación SPS, pulse F1 en el teclado del Tech 2 o resalte Sistema Programación de Servicio en la pantalla del Menú Principal (fi gura VIIC-13) y, acontinuación, pulse [ENTER]. Seleccione F1 o resalte Programación del Vehículo y pulse [ENTER](fi gura VIIC-22).
11. La pantalla Datos Nueva Programación que aparece a continuación (fi gura VIIC-23) contiene los números VIN y los números de calibración de software. Verifi que que el VIN es correcto y pulse latecla de función Continuar.
12. En la próxima pantalla de SPS del Tech 2 (fi gura VIIIC-19), siga las instrucciones que aparecen:Apague todos los dispositivos consumiendo corriente. Coloque la ignición en On con el motorapagado. Asegúrese que la batería esté cargada. A continuación pulse la tecla de función Continuar.
13. Es posible que aparezca el mensaje “Por favor, espere” brevemente a medida que comienza laprogramación. Una barra de porcentaje marcará el progreso de la descarga (fi gura VIIC-24).
14. Una vez completada la programación, en la pantalla aparece “Programación Satisfactoria”(fi gura VIIC-25). Desconecte la llave de contacto y pulse la tecla de función Continuar.
Realizando programación pass-thru
La programación mediante transferencia de datos permite a la herramienta de diagnosis permanecer conectada al terminal y al vehículo durante el proceso de programación. El vehículo debe estar cerca del terminal durante la programación mediante transferencia de datos (consulte la fi gura VIIC-28).
IMPORTANTE: El sistema TIS sólo admite la programación de servicio con el Tech 2.
Procedimiento de programación pass-thru
1. Inicie TIS.2. Desde la pantalla principal de TIS (fi gura VIIB-2), seleccione el icono Sistema de programación de servicio.3. En la pantalla de seleccionar herramienta de diagnosis y proceso de programación (fi gura VIIC-29):• Bajo “Seleccionar herramienta de diagnosis,” seleccione Pass-Thru.• En “Seleccionar proceso de programación,” seleccione Reprogramar la ECU o Reemplazar y programar la ECU, según si desea volver a programar un módulo ya existente o si desea sustituir un módulo completo.• En “Seleccionar ubicación de ECU,” seleccione Vehículo o Adaptador de programación fuera de borda (OBPA), dependiendo de si ejecuta una programación en el vehículo o fuera del vehículo.• Seleccione Siguiente.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-44
4. En la pantalla Preparando para la comunicación, determinación del vehículo (fi gura VIIC-30), complete todos los datos dirigidos por el terminal hasta que aparezca resaltada la opción Siguiente (los datos del vehículo variarán). Seleccione Siguiente.
IMPORTANTEPara reducir la posible pérdida de señal, se recomienda que la longitud del cable RS-232 no supere los 25 pies (7.62 Mts.).5. Siga las instrucciones que aparecen en la pantalla Preparación para la comunicación (fi gura VIIC-31) y, a continuación, seleccione la opción Siguiente.6. Compruebe el VIN en la pantalla Validate Vehicle Identifi cation Number (VIN) (Validar número de identifi cación del vehículo, VIN) (fi gura VIIC-4). Seleccione Siguiente.Cuando aparezca la pantalla de opciones: Introduzca toda la información necesaria y, a continuación, seleccione Siguiente.
IMPORTANTEEn caso de que el número de identifi cación del vehículo (VIN) no aparezca correctamente, deberá introducir el número VIN correcto.
7. En la pantalla Controladores incluidos (fi gura VIIC-5):• Seleccione el módulo de control adecuado en “Seleccionar controlador,” como, por ejemplo, PCM/VCM - Módulo de control del vehículo/tren motriz. Las opciones disponibles en el cuadro Seleccionar controlador variarán según el número VIN introducido en la pantalla anterior.• Seleccione el tipo de programación adecuado (Normal, VCI o Reconfi gurar).• Seleccione Siguiente.
IMPORTANTECuando seleccione el tipo de programación por índice de confi guración del vehículo (VCI), deberá introducir un número VCI válido para el vehículo. Puede obtener este número a través del Centro de atención al cliente Techline.Debe resaltar el tamaño de los neumáticos y la relación del eje correctos y deberá introducir un número VCI válido si selecciona el tipo de programación de Reconfi gurar.Seleccione Cancelar si obtiene un mensaje indicando que la calibración seleccionada es la calibración actual del módulo de control y que no es posible llevar a cabo la reprogramación con la misma descarga.• Si selecciona el tipo de programación mediante VCI, aparecerá el cuadro de introducción de número VCI (fi gura VIIC-32). Introduzca un número VCI válido para el vehículo (suministrado por el Centro de atención al cliente) y seleccione Aceptar.• Si selecciona el tipo de programación mediante Reconfi gurar, aparecerá el cuadro de introducción de reconfi guración (fi gura VIIC-33). Seleccione el tamaño de neumáticos y la relación de eje correctos y, a continuación, seleccione Aceptar. Aparecerá el cuadro de introducción del número VCI (fi gura VIIC-32).Introduzca un número VCI válido para este vehículo y selecciona Aceptar.

Red de Cominicación en el Vehículo
Mayo 2009A-45
Módulos de Control
Realizando SPS remota con el adaptador de programación off-board (OBPA)
El OBPA se utiliza en situaciones en las cuales se debe de programar un módulo sin tener el vehículo presente. Esto puede ser necesario, por ejemplo, cuando el departamento de repuestos venda un módulo de control a un cliente de postventa o de comercialización al por menor. Para realizar SPS en esta situación se requiere el uso de un adaptador de programación off-board. El adaptador permite que el módulo se encienda y que se comunique con la herramienta de exploración. El número de parte para el equipo OBPA es J-41207-C.
ATENCIONAntes de llevar a cabo el procedimiento SPS, es importante tener en cuenta la siguiente precaución.Asegúrese de que la herramienta Tech 2 y el terminal estén equipados con la última versión del software.
Procedimiento de programación remota off-board
1. Obtenga el VIN del vehículo al que pertenece el módulo que se va a programar.2. Inicie TIS. Seleccione el icono de Sistema de programación de servicio en la pantalla principal de TIS.3. En la pantalla Seleccionar herramienta de diagnosis y proceso de programación (fi gura VIIC-2), haga la selección apropiada para su procedimiento:• Bajo “Seleccionar herramienta de diagnosis,” seleccione Tech 2.• En “Seleccionar proceso de programación” identifi que si el módulo se va volver a programar o si se va a sustituir.• Bajo “Seleccionar ubicación de ECU,” seleccione Adaptador de programación fuera de borda (OBPA).• Seleccione Siguiente.4. Siga las instrucciones en la pantalla Preparando para la comunicación (fi gura VIIC-35) para conectar el módulo de control, OBPA y Tech 2. Asegúrese de que utiliza el conector correcto para el módulo de control.5. Estando en la pantalla de conexión del terminal, diríjase al Tech 2 y seleccione la función de solicitar información en programación de servicio. Siga las instrucciones de la herramienta Tech 2 para obtener la información de seguridad y de los datos del módulo.6. Una vez el Tech 2 ha recibido los datos del módulo, salga del modo de solicitud de información y desconecte el Tech 2 del OBPA. A continuación apague el Tech 2.7. Conecte el Tech 2 al terminal (fi gura VIIB-4). Encienda el Tech 2.8. Cuando aparezca la pantalla de inicio del Tech 2, seleccione Siguiente en el PC.9. En el terminal, introduzca el VIN del vehículo que va a recibir el módulo de control. Seleccione Siguiente.10. El terminal desplegará el mensaje “conectándose a la base de datos.”

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-46
11. En la pantalla Controladores incluidos (fi gure VIIC-5), seleccione el tipo de programación que desea llevar a cabo de entre las siguientes categorías:• Normal: se utiliza para actualizar una calibración existente o para la programación de un controlador nuevo.• VCI (índice de confi guración del vehículo): se utiliza para actualizar un controlador existente o para programar un nuevo controlador para vehículos recientes cuyos números VIN no estén incluidos en la base de datos.• Reconfi gurar: se utiliza para volver a confi gurar un vehículo para hacer cambios en el tamaño de ruedas y en la relación de ejes.• Seleccione Siguiente.12. Una pantalla de Selección de calibración aparecerá mostrando la calibración a utilizar (fi gura VIIC-7). Si es necesario realice la selección de calibración. Cuando se hayan seleccionado todas las calibraciones, aparecerá una marca de verifi cación de color verde en cada fi cha de carpeta. Seleccione Siguiente.13. Aparecerá una pantalla de Resumen que mostrará las calibraciones actuales y seleccionadas del módulo de control (fi gura VIIC-9). Confi rme sus selecciones y seleccione Siguiente.Nota: Si las calibraciones son las mismas, aparecerá un cuadro de control NAODRUI (fi gura VIIC-10) indicando que la calibración seleccionada es la calibración actual del módulo de control.Haga clic en Aceptar.14. Aparecerá una pantalla de Transferir datos (fi gura VIIC-11). El terminal cargará automáticamente la nueva calibración.15. Una vez completada la descarga, aparecerá la pantalla “Controlador del programa” (fi gura VIIC-36). Siga las instrucciones que aparezcan en la pantalla y, a continuación, seleccione Cerrar, desconecte la alimentación y desconecte la herramienta Tech 2 del PC.Nota: En la mayoría de los vehículos GM será necesario llevar a cabo el Procedimiento de reaprendizaje de variación de posición del cigüeñal.16. Reconecte el Tech 2 a la OBPA. Seleccione la función “Programación de Servicio” del Tech 2 y descargue la calibración al módulo al seleccionar la función Programación del Vehículo (F1). En la pantalla Datos Nueva Programación (fi gura VIIC-23), presione la tecla soft Continuar. Siga las instrucciones en la pantalla, y entonces presione la tecla soft Continuar.17. Cuando la programación se haya acabado, presione [EXIT] en el Tech 2, apague el OBPA y apague el Tech 2.
IMPORTANTEEspere 30 segundos tras la desconexión de OBPA antes de desconectar el módulo de control. De esta forma el controlador se restablecerá.

Red de Cominicación en el Vehículo
Mayo 2009A-47
Módulos de Control
SPS con adaptador de programación fuera del vehículo (OBPA) mediantetransferencia de datos
El OBPA se utiliza en situaciones en las cuales se debe de programar un módulo sin tener el vehículo presente. Esto puede ser necesario, por ejemplo, cuando el departamento de repuestos venda un módulo de control a un cliente de postventa o de comercialización al por menor. Para realizar SPS en esta situación se requiere el uso de un adaptador de programación off-board. El adaptador permite que el módulo se encienda y que se comunique con la herramienta de exploración. El número de parte para el equipo OBPA es J-41207-C.
ATENCION• Antes de llevar a cabo la programación SPS, asegúrese de que la herramienta de diagnosis y de que el terminal están equipados con la última versión de software.• Para evitar posibles fallos en el controlador, asegúrese de que todas las conexiones de cables están fi jas.Procedimiento de programación fuera del vehículo mediante transferencia de datos
1. Conecte el dispositivo OBPA a la herramienta Tech 2 y al PC.2. Inicie TIS. Haga clic en el icono de sistema de programación de servicio en la pantalla principal del sistema TIS (fi gura VIIB-2).3. En la pantalla Seleccionar herramienta de diagnosis y proceso de programación (fi gura VIIC-39), seleccione Pass-Thru (transferencia de datos), Reprogramar la ECU y Adaptador de programación fuera de borda (OBPA) como ubicación de la ECU. Seleccione Siguiente.4. En la pantalla Preparando para la comunicación, determinación del vehículo (fi gura VIIC-30), complete todos los datos dirigidos por el terminal hasta que aparezca resaltada la opción Siguiente (los datos del vehículo variarán) y, a continuación, seleccione Siguiente.5. Siga todas las instrucciones que aparecen en la pantalla para el módulo de control, OBPA y la herramienta de diagnosis (consulte la fi gura VIIC-35). Seleccione Siguiente.6. La ventana “Pass-Thru” (Transferencia de datos) mostrará el número VIN (fi gura VIIC-4) almacenado en el módulo de control. Cuando programe un nuevo módulo de control, introduzca el número VIN correcto del vehículo que vaya a programar. Seleccione Siguiente.7. Si aparece la pantalla Opciones (fi gura VIIC-40), seleccione las opciones correspondientes. Seleccione Siguiente, y seleccione las opciones subsecuentes que se aplican.8. El PC mostrará una pantalla solicitándole la selección del tipo de programación que desee llevar a cabo, es decir, normal o VCI (fi gura VIIC-5). Seleccione Normal. Si selecciona el modo VCI, aparecerán un conjunto de pantallas que le guiarán a través del proceso. Seleccione Siguiente.9. Aparecerá la pantalla Selección de calibración (fi gura VIIC-7) indicando la calibración que se va a utilizar. Si es necesario realice la selección de calibración. Cuando se hayan seleccionado todas las calibraciones, aparecerá una marca de verifi cación de color verde en cada fi cha de carpeta. Seleccione Siguiente.10. Aparecerá una pantalla de Resumen (fi gura VIIC-9) de las calibraciones del módulo de control seleccionadas. Confi rme sus selecciones y seleccione Siguiente.Nota: Si las calibraciones son iguales, aparecerá el cuadro NAODRUI Control (fi gura VIIC-10). Seleccione Aceptar.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-48
Nota: Para controladores de vehículos del año 96 y posteriores, aparecerá un cuadro de reprogramación de a variación de la posición del cigüeñal en la pantalla Program Controller (Controlador de programa) (fi gura VIIC-36). Seleccione Cerrar.11. Aparecerá una pantalla de Transferir datos (fi gura VIIC-11). El PC cargará automáticamente la calibración en el módulo de control.12. Una vez completada la programación, aparecerá la pantalla “Programación concluida” del controlador de programa. Siga las instrucciones que aparezcan en la pantalla (si aparecen algunas) y, a continuación, seleccione Cerrar.13. Apague el OBPA y apague la herramienta de diagnosis (espere 30 segundos tras desconectar el dispositivo OBPA antes de desconectar el módulo de control para que éste se reinicie).14. Desconecte el dispositivo OBPA de la herramienta Tech 2 y el módulo de control. (Consulte las fi guras VIIC-37 y VIIC-38.)
Adaptador de programación individual del módulo de control (J-45211) para Cadillac
El adaptador de programación individual del módulo de control J-45211 (fi gura VIIIC-41), también denominado mazo de cables del adaptador de programación del módulo de control de la cadena cinemática (PCM), se utiliza para conectar la herramienta Tech 2 al PCM de un vehículo y para llevar a cabo funciones de SPS para vehículos Cadillac del año 2000 o posteriores DeVille, Seville y Eldorado. El adaptador J-45211 aísla el PCM del sistema eléctrico del vehículo para que la actividad de otros ordenadores de a bordo no interrumpa la comunicación entre la herramienta Tech 2 y el PCM.
ATENCIONSi no se mantienen las conexiones del adaptador J-45211 (PCM, Tech 2, alimentación y masa) durante todo el procedimiento de programación, podrían producirse interrupciones que, a su vez, podrían provocar DAÑOS IRREVERSIBLES EN EL PCM.
Procedimiento de utilización de la herramienta J-45211:
1. Asegúrese de que el terminal Techline y de que la herramienta Tech 2 disponga de la última versión de software disponible.2. Desconecte el encendido del vehículo y extraiga la llave del bombín de encendido. Desconecte todos los accesorios eléctricos.3. Abra el capó y mida la tensión de la batería directamente en los bornes positivo y negativo de la batería con el multímetro digital J-39200. En caso de que no pueda acceder al borne negativo de la batería o en caso de que la batería no esté situada debajo del capó, compruebe la tensión entre el bloque motor y la conexión positiva de la caja de empalmes situada en el compartimiento motor.4. Si la tensión de la batería no es de 12 voltios o superior, cargue la batería antes de continuar. Cuando haya cargado la batería, desconecte el cargador de la batería antes de proceder a la programación del módulo de control de la cadena cinemática (PCM).

Red de Cominicación en el Vehículo
Mayo 2009A-49
Módulos de Control
5. Localice el PCM y desenchufe los conectores del mazo de cables del vehículo del PCM.6. Enchufe los conectores del mazo de cables de la herramienta J-45211 al PCM.7. Conecte los elementos de alimentación de la herramienta J-45211 directamente a los bornes de la batería del vehículo. En caso de que no pueda acceder a los bornes de la batería o en caso de que la batería no esté situada debajo del capó, conecte la herramienta al bloque motor (masa) y al polo positivo de la batería de 12 voltios situado en el compartimiento motor.8. Observe el indicador luminoso de color rojo de la batería en la herramienta J-45211. El indicador rojo deberá permanecer encendido cuando se conecte la herramienta J-45211 a la tensión de la batería. Cuando el indicador rojo no se ilumine, compruebe el fusible de cinco amperios de la herramienta. Si el fusible está en buen estado y el indicador rojo sigue sin iluminarse, póngase en contacto con asistencia técnica.9. Conecte el interruptor de encendido de la herramienta J-45211 para aplicar tensión de encendido al PCM.10. Los indicadores luminosos de color amarillo y verde deberán iluminarse cuando el interruptor de encendido esté conectado. El indicador amarillo controla la tensión de encendido aplicada al módulo de control. Los indicadores de color verde son una señal de retroalimentación del módulo de control que indican que los circuitos internos de los módulos están en funcionamiento.11. Conecte la herramienta Tech 2 al dispositivo J-45211 y acceda al sistema de programación de servicio.12. Seleccione y ejecute Request Information (Solicitar información).13. Cuando la herramienta Tech 2 haya completado la información necesaria, desconecte el interruptor de encendido de la herramienta J-45211.14. Apague el Tech 2 y desconéctelo del J-45211.15. Conecte la herramienta Tech 2 al terminal Techline. Descargue la nueva calibración del PCM a la herramienta Tech 2 mediante el terminal Techline y el software del sistema TIS. Una vez completada la descarga a la herramienta Tech 2, desconecte la herramienta Tech 2 del terminal Techline.16. Vuelva a conectar el Tech 2 al J-45211 y conecte el interruptor de encendido de la herramienta.17. Acceda al sistema de programación de servicio. A continuación seleccione y ejecute la opción Programar.18. Una vez completada la programación, desconecte el interruptor del dispositivo J-45211 y espere a que los indicadores de color verde se apaguen antes de continuar o de desenchufar cualquier conector.19. Apague el Tech 2 y desconéctelo del J-45211.20. Desconecte el dispositivo J-45211 del PCM.21. Desconecte los elementos de alimentación de los bornes de la batería.22. Vuelva a enchufar los conectores del mazo de cables del vehículo al PCM y vuelva a montarlo.23. Conecte la herramienta Tech 2 al conector de diagnosis situado debajo del panel de instrumentos y arranque el motor.24. Conecte la herramienta Tech 2, “localice” el vehículo y seleccione Verifi cación Circuito Diagnóstico y, a continuación, borre todos los códigos de avería.Nota: Ésto borrará los códigos de avería de todos los módulos de control de forma simultánea.25. Si se vuelve a iluminar el indicador de reparación del motor tras borrar todos los códigos de avería, puede que exista otro problema o que sea necesario llevar a cabo el procedimiento de programación de variación del sistema de posición del cigüeñal. Siga las instrucciones descritas en el manual de servicio.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-50
Herramienta de comprobación de conexión de datos serie (J-42236-A) para Corvette
La herramienta de comprobación de conexión de datos serie J-42236-A (fi gura VIIIC-42) se utiliza para llevar a cabo funciones de SPS para versiones desde el año 1997 hasta la última versión del Chevrolet Corvette.
Consulte el manual de servicio para obtener instrucciones detalladas sobre cómo utilizar este dispositivo para llevar a cabo la programación.
ATENCIONSi no se siguen dichos procedimientos podrán provocarse DAÑOS IRREVERSIBLES en el PCM.
Procedimiento de conexión de la herramienta J-42236-A al PCM del vehículo:
1. Asegúrese de que la batería está totalmente cargada y de que la conexión del conector de diagnosis es correcta.
2. Desconecte el encendido.
3. Extraiga el panel de acceso del piso del lado del acompañante. (Consulte el manual de servicio para obtener información más detallada.)
4. Extraiga los puentes de las cajas de cableado (conectores de estrella). Puede que sea necesario extraer las cajas de cableado de los correspondientes soportes.
5. Monte el cable de la caja de cableado (conector de estrella) #1 de la herramienta de comprobación de conexiones de datos serie J-42236-A en la caja conexiones de 12 pines. Éste es el conector con unos ocho o 10 cables.
6. Monte el cable de la caja de cableado (conector de estrella) #2 de la herramienta de comprobación de conexiones de datos serie J-42236-A en la caja conexiones de 12 pines. Éste es el conector con cuatro cables.
7. Seleccione el cable de la caja de cableado (conector de estrella) #1 del interruptor de la herramienta J-42236-A.
8. Seleccione la posición B en la herramienta J-42236-A. Continúe con los procedimientos de programación normales.

Red de Cominicación en el Vehículo
Mayo 2009A-51
Módulos de Control
Módulo CANdi
Esta sección sólo se aplica a vehículos GM equipados con GM LAN/CAN (red de área local/red deárea de controlador de GM). Ignore esta sección si su proveedor no dispone de ningún vehículo que admita esta aplicación.
Ignore esta sección si su proveedor no dispone de ningún vehículo que admita esta aplicación.
Los vehículos GM utilizan sistemas de baja velocidad (10,4 K de velocidad de transmisión de datos) de clase 2. Sólo un número limitado de plataformas (Saturn Ion, Cadillac XLR) están equipadas con este nuevos sistema LAN/CAN de GM. Estas versiones disponen de un bus CAN de un único cable para los controles de la carrocería, un bus CAN para la información y entretenimiento y un bus CAN de alta velocidad para la cadena cinemática (módulos que cumplen con OBD II). Con el objetivo de satisfacer estas necesidades se ha desarrollado una nueva interfaz de diagnosis: la interfaz de diagnosis de red de área local (CANdi). El módulo CANdi (fi gura VIID-1, fi gura VIID-2) es una mejora de la herramienta Tech 2 y completa la interfaz necesaria para comunicarse con sistemas de ordenadores de a bordo de futuros modelos.
Funcionamiento básico
El módulo CANdi es un módulo de cable en línea que funciona con los componentes de la herramienta Tech 2 existentes que incluyen el VCI, los cables y los adaptadores. Una vez instalado, el módulo CANdi es totalmente compatible con las versiones de software de la herramienta Tech 2 actuales y anteriores.
El módulo se conecta de una forma sencilla y clara para el usuario. Esto permite que el software existente de la herramienta Tech 2 pueda utilizarse sin que sea necesario hacer cambio alguno cuando se instale el módulo CANdi. Cuando un vehículo requiera la utilización de un módulo CANdi, la herramienta Tech 2 habilitará las funciones específi cas del módulo.
La función principal del módulo CANdi es añadir la función CAN (red de área de controlador) a laherramienta Tech 2. La siguiente lista resume las características básicas del módulo CANdi:• Admite comunicaciones simultáneas en los tres buses CAN.• Ofrece comunicaciones UART de alta velocidad con la herramienta Tech 2.
La herramienta Tech 2 controla el funcionamiento del módulo CANdi. Una vez instalado, el módulo CANdi no interferirá con los procedimientos de diagnosis que esté llevando a cabo la herramienta Tech 2.
La utilización del módulo no requiere cambios físicos en la herramienta the Tech 2, en los cables o en los adaptadores. El módulo funciona de un modo transparente hasta que se activa con la herramienta Tech 2.
Una vez activado, el módulo CANdi funciona bajo el control de la herramienta Tech 2. El software de la aplicación Tech 2 cargado en la tarjeta PCMCIA de la herramienta Tech 2 determina todas las funciones.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-52
IMPORTANTECuando funcione correctamente, el indicador luminoso del módulo CANdi parpadeará. Si se produce algún problema, el indicador luminoso se encenderá. Si la luz del módulo está fi ja, consulte la sección de resolución de problemas del manual.
Conexión del módulo CANdi a la herramienta Tech 2
El módulo CANdi se conecta a la herramienta Tech 2 a través del conector de diagnosis Burndy. Laconexión lateral del vehículo seguirá siendo la misma, ya que utilizará el adaptador de la interfaz entre el cable de diagnosis y el adaptador SAE J-1962, tal y como se indica en la fi gura VIID-3.
Prueba del sistema cable / Tech 2 / VCI
Antes de utilizar el módulo CANdi, compruebe la herramienta Tech 2, el VCI y el cable según se describe en el apéndice 1 para comprobar la integridad del sistema. Consulte la fi gura V-5 para ver el extremo del conector del adaptador de prueba de diagnosis.

Red de Cominicación en el Vehículo
Mayo 2009A-53
Módulos de Control
Actualizaciones de software del módulo CANdi
Las actualizaciones de software del módulo CANdi se almacenan en la tarjeta PCMCIA de 32 megabytes.
Cuando se conecte al cable de diagnosis del vehículo y se encienda la herramienta Tech 2, el módulo CANdi se actualizará automáticamente. Cuando se actualice un módulo CANdi, aparecerá la pantalla mostrada en la fi gura VI-25. En la pantalla de la herramienta Tech 2 aparecerá un indicador del progreso de la actualización de software. Si se produce algún problema relacionado con la actualización, éste se mostrará en la herramienta Tech 2. (Consulte la sección VI – resolución de problemas.)
Cuando la actualización haya fi nalizado correctamente, podrá obtener la versión del software actual del módulo CANdi siguiendo estos pasos:
F9: Seleccione Diagnósticos CANdi desde el menú Opciones de la Herramienta (fi gura VI-29)
F0: Seleccione Resultados POST desde el menú Diagnósticos CANdi (fi gura VI-30)
La pantalla Resultados CANdi POST (fi gura VI-31) también puede utilizarse para determinar si el módulo ha tenido algún problema durante la actualización del software o en la secuencia de inicio.
El servicio de soporte técnico también puede utilizar la información de la pantalla Resultados CANdi POST si el usuario detecta algún problema durante una actualización.
En el software del sistema TIS se incluye la última versión del software del módulo CANdi. Esta versión se descargará automáticamente a la tarjeta PCMCIA en la actualización del software. Asegúrese de que dispone de la última versión del software TIS en su terminal.

M18044.15B
Jefe de tallerBooklet
Mayo 2009 A-54
NOTAS
______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________

Red de Cominicación en el Vehículo