Embed Size (px)
Citation preview

Reinforcement Learning
A.1 Introdução
Reinforcement Learning é uma abordagem computacional que estuda o
aprendizado a partir da interação entre agente e ambiente, que se tornou multi-
disciplinar (inteligência artificial, psicologia, engenharia de controle,
neurociência, redes neurais, algoritmos genéticos) nos últimos anos. É uma
subdivisão do paradigma de aprendizado sem mestre (Haykin, 1998). Além disso,
possibilita o aprendizado diretamente a partir da interação com o ambiente sem ter
que considerar qualquer situação que não seja realmente experimentada e sem ter
qualquer habilidade para predizer como o ambiente deve se comportar em
resposta as suas ações.
Existem grandes diferenças entre Reinforcement Learning e sistemas
baseados em aprendizado supervisionado. A diferença mais importante está na
ausência da apresentação de pares de entrada e saída, presentes em sistemas
supervisionados. Em sistemas baseados em reforço, a avaliação do sistema
acontece simultaneamente ao aprendizado e precisa explicitamente explorar seu
ambiente.
Reinforcement Learning é antes de tudo indicado quando se deseja obter a
política ótima nos casos em que não se conhece a priori a função que modela esta
política. O agente deve interagir com seu ambiente diretamente para obter
informações, que serão processadas, através de um algoritmo apropriado, para
produzir uma política ótima.
Reinforcement Learning é o aprendizado do mapeamento de estados em
ações para maximizar um recompensa ou um sinal de reforço. O aprendizado deve
descobrir que ações resultam no maior retorno. O algoritmo de aprendizado é
baseado na teoria da recompensa/punição, ou seja, o conhecimento é formado por
tentativa e erro através da interação com o ambiente e, principalmente, sem ser
necessário especificar como as tarefas devem ser executadas (Kaelbling et.al.,
1996).
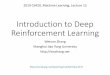
No modelo padrão de Reinforcement Learning, um agente é conectado ao
seu ambiente via sensores e motores (percepções e ações). A cada passo, a partir

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
158
da interação, através dos sensores, o agente recebe a entrada i, que determina o
estado atual s do ambiente; o agente escolhe uma ação a para gerar uma saída, que
é executada pelos atuadores (figura A-1).
Figura A.1 – Agente
Com a execução de uma ou mais ações o agente teve o seu estado alterado e
o estado atual é avaliado e comunicado ao agente através de um valor escalar – o
reforço.
O módulo B, que determina o comportamento do agente, deve escolher
ações que aumentem o valor de reforço.
Dessa forma o modelo consiste em:
• Um conjunto de estados discretos S, onde s ∈ S.
• Um conjunto de ações discretas A, onde a ∈ A
• Os reforços escalares, valores tipicamente entre [0,1].
O trabalho do agente é encontrar a política π, definida como o mapeamento
de estados em ações, que maximize as medidas do reforço. O ambiente é definido
como estacionário, isto é, não é considerada a possibilidade de que uma mesma
Agente
PE R CE P Ç Õ E S
AÇÕES
Sensores Atuadores i
s Ba

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
159
ação aplicada a um estado em duas ocasiões diferentes resulte em dois estados
diferentes. Esta suposição vai contra uma das principais motivações para a
construção de sistemas que apresentam características de aprendizado. No entanto,
alguns algoritmos podem ser efetivos em ambiente não estacionários, cuja
variação é lenta.
A.2 Características do Reinforcement Learning
Em um sistema de Reinforcement Learning existem duas características
fundamentais: o aprendizado por interação e por retorno atrasado. A seguir, são
descritas algumas características do RL:
Aprendizado por interação
Aprendizado por interação é a característica principal que define um
problema de Reinforcement Learning. O agente RL age no ambiente e aguarda
pelo valor de reforço que o ambiente deve lhe retornar em resposta a ação tomada,
guardando este valor para tomar decisões posteriores.
Retorno atrasado
O fato de o ambiente retornar ao agente um valor de reforço máximo não
quer dizer necessariamente que a ação tomada pelo agente foi a melhor. Uma ação
é produto de uma decisão local no ambiente, sendo seu efeito imediato de
natureza local, enquanto que, em um sistema Reinforcement Learning, busca-se
alcançar objetivos globais no ambiente. Assim, as ações tomadas devem
maximizar o retorno total, isto é, a qualidade das ações tomadas é vista pelas
soluções encontradas no longo prazo. Este problema foi tratado na tese de
Watkins (1989), onde ele conclui que, como a única informação que o agente
recebe do ambiente é o reforço imediato, a partir desse valor deve ser gerado
algum outro valor que permita obter uma visão da qualidade das ações efetuadas
em longo prazo.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
160
Orientado ao objetivo
Em Reinforcement Learning, o problema tratado é considerado como um
ambiente que dá respostas em função de ações efetuadas, não sendo necessário
conhecer detalhes da modelagem desse ambiente. Simplesmente, existe um agente
que atua dentro do ambiente desconhecido tentando alcançar um objetivo. O
objetivo é, geralmente, otimizar algum comportamento dentro deste ambiente.
Exploration x Exploitation Um agente RL procura sempre obter o valor máximo de retorno, escolhendo
ações que forneceram bons reforços no passado, através da exploração das boas
ações já descobertas. Todavia, para o agente ter encontrado essas boas ações, em
algum momento teve que escolher ações sem ter o conhecimento prévio da
qualidade dessas ações. Assim, para descobrir melhores ações, o agente não deve
deixar de procurar por alternativas. Este fato constitui o dilema exploration-
exploitation, bem conhecido na área de Algoritmos Genéticos (Goldberg, 1989),
que é o conflito entre tirar proveito das boas informações já descobertas
(cruzamento) e buscar novas informações (mutação) (Holland, 1975).
Existem vários métodos para abordar este problema, que são utilizados
pelos diferentes algoritmos desenvolvidos na área de Reinforcement Learning
(Kaelbling et. al., 1996) .
A.3 Fundamentos Matemáticos do RL
Existem dois conceitos que devem ser conhecidos para facilitar a
modelagem de um sistema baseado em Reinforcement Learning. A seguir,
apresentamos uma breve descrição destes conceitos.
Propriedade de Markov

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
161
Quando a probabilidade de transição de um estado s para um estado s’
depende apenas do estado s e da ação a adotada em s, isso significa que o estado
corrente fornece informação suficiente para o sistema de aprendizado decidir que
ação deve ser tomada. Quando o sistema possui esta característica, diz-se que ele
satisfaz a propriedade de Markov (Bellman, 1957).
No caso mais geral, se a resposta em 1+t (estado seguinte) para uma ação
efetuada em t depende de todo o histórico de ações até o momento atual, a
dinâmica do ambiente é definida pela especificação completa da distribuição de
probabilidades, como mostra a equação abaixo:
{ }0011111 ,,,,,,,,,'Pr asrasrasrrss ttttttt K−−++ == A.1
onde a probabilidade (Pr), do estado 1+ts ser o estado s' e o reforço 1+tr ser
igual a r, é uma função que depende de todos os estados, ações e reforços
passados: ( 00111 ,,,,,,,, asrasras ttttt K−− ).
Propriedade de Markov: Se resposta do ambiente em 1+t depende
apenas dos estados e reforços em t . Assim, a probabilidade da transição para o
estado s’ é dada pela expressão da eq. A.2.
{ }ttttss asrrssap ,,'Pr)( 11', === ++ A.2
A probabilidade de transição do estado s para o estado s’ (Pr) satisfaz às
condições:
1. 0)(', ≥ap ss
2. 1)('
', =∑s
ss ap
A Propriedade de Markov é de fundamental importância no Reinforcement
Learning, uma vez que tanto as decisões como os valores são função apenas do

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
162
estado atual, abrindo a possibilidade de métodos de soluções incrementais, onde
pode-se obter soluções a partir do estado atual e para cada um dos sucessivos
estados futuros, como é feito no método de Programação Dinâmica.
Processos de Decisão de Markov (PDM)
Um Processo de Decisão de Markov PDM (Markovian Decision Process)
(Bellman, 1957) é definido como um conjunto de estados Ss∈ , ações )(sAa∈ ,
um conjunto de transições entre estados associadas com as ações e um conjunto de
probabilidades P sobre o conjunto S que representa uma modelagem das
transições entre os estados. Assim, dado um par de estado e ação (s,a), a
probabilidade do estado s passar a um estado 's é:
{ }aassssP ttta
ss ==== + ,'Pr 1' A.3
onde Pr é o operador de probabilidade; neste caso representa-se a probabilidade
do estado 1+ts ser s', sempre que o estado ts tenha sido s e a ação tomada no
tempo t seja a ação a . Desta forma, a dependência que o seguinte estado 1+ts seja
o estado 's está relacionada a tomar a ação a no tempo t .
De forma análoga, dados um estado e ação atuais e um estado seguinte 's , o
valor esperado do retorno é:
{ }',, 11' ssaassrER tttt
ass ==== ++ A.4
onde { }E é o valor esperado do retorno 1+tr , sempre que o estado ts no tempo t
passe ao estado s' no tempo 1+t .
Os valores de probabilidade assP ' e retorno esperado a
ssR ' determinam os
aspectos mais importantes da dinâmica de um PDM finito. O processo de decisão
de Markov finito e discreto no tempo pode ser caracterizado da seguinte forma:

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
163
• ambiente evolui probabilisticamente baseado num conjunto finito e
discreto de estados;
• para cada estado do ambiente, existe um conjunto finito de ações
possíveis, onde a mais adequada pode ser aprendida pelo sistema
ao longo do processo;
• a cada passo que o sistema de aprendizado executar uma ação, a
mesma é avaliada, ou seja, é verificado um custo positivo ou
negativo para o ambiente em relação à ação;
• estados são observados, ações são executadas e reforços são
relacionados.
Assim, para quase todos os problemas de Reinforcement Learning é suposto
que o ambiente tenha a forma de um Processo de Decisão de Markov, desde que
seja satisfeita a Propriedade de Markov no ambiente. Nem todos os algoritmos de
RL necessitam uma modelagem PDM inteira do ambiente, mas é necessário ter-se
pelo menos a visão do ambiente como um conjunto de estados e ações (Sutton &
Barto, 1998).
A.4 Elementos do Reinforcement Learning
Um sistema típico de Reinforcement Learning constitui-se basicamente de um
agente interagindo em um ambiente (
Figura A.2). O agente percebe as situações dadas no ambiente e, baseado nessas
sensações, seleciona uma ação a tomar no ambiente. A ação tomada muda de
alguma forma o ambiente, e as mudanças são comunicadas ao agente através de
um sinal de reforço. Existem quatro partes fundamentais no problema do RL: a
interface agente-ambiente, a política, o reforço e função de reforço e a função de
valor.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
164
AGENTE
AMBIENTE 1+ts1+tr
taAção
EstadoReforço ts
tr
Função de valorPolítica
Figura A.2 - Diagrama de um sistema básico de Reinforcement Learning.
Interface Agente - Ambiente
Qualquer sistema RL aprende a fazer um mapeamento de situações e ações
por meio da interação com um ambiente dinâmico. O ambiente deve ser
percebido, ao menos parcialmente, pelo sistema de aprendizado. A informação
pode ser do tipo leitura de sensores, descrições simbólicas, ou até mesmo
situações mentais. As ações tomadas podem ser de baixo nível, como valores de
tensão, ou de alto nível, como uma situação mental. Se o agente pode observar
toda a informação relevante do ambiente, então também pode fazer a seleção de
ações baseando-se em estados do ambiente. Este caso ideal é a melhor base
possível para RL. De fato, é uma condição necessária para grande parte da teoria
do RL.
A política
Uma política, expressa pelo termo π , representa o comportamento que o
sistema RL segue para alcançar o objetivo. Utilizando termos de RL, uma política
π é um mapeamento de estados s em ações a , tomadas naquele estado, em um
valor ),( asπ que representa a probabilidade de tomar a ação a quando se está no
estado s . Assim, se um agente RL muda a sua política, então as probabilidades de
seleção de ações sofrem mudanças e, conseqüentemente, o comportamento do
sistema apresenta variações. Portanto, o processo de aprendizado no sistema RL
pode ser expresso em termos da convergência até uma política ótima que conduza

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
165
à solução do problema de forma ótima. Uma política ótima é denotada como
),(* asπ .
Corresponde em termos psicológicos ao conjunto de estímulos- respostas ou
associações. Em alguns casos a política pode ser uma função extensiva ou uma
tabela. Em outros, pode exigir processos computacionais mais extensos como os
algoritmos de busca. A política é o cerne do RL.
Reforço e Retorno
O Reforço é um sinal do tipo escalar representado por 1+tr que é devolvido
pelo ambiente ao agente assim que uma ação tenha sido efetuada e uma transição
de estado 1+→ tt ss tenha ocorrido. Existem diferentes formas de definir o reforço
para cada estado no ambiente, gerando-se funções de reforço que,
intrinsecamente, expressam o objetivo que o sistema RL deve alcançar. O agente
deve maximizar a quantidade total de reforços recebidos, o que nem sempre
significa maximizar o reforço imediato a receber, mas o reforço acumulado
durante a execução total.
O uso de um sinal de reforço é uma das características que distinguem os
métodos de Reinforcement Learning. Embora o aprendizado baseado em um
reforço pareça limitado, foi verificado na prática que o uso de reforços é bem
aplicável, obtendo-se bons resultados.
O retorno está relacionado ao valor geral esperado em longo prazo, definido
formalmente como um somatório dos reforços obtidos até um tempo t. De modo
geral, o sistema RL busca maximizar o valor esperado de retorno, onde o retorno é
definido como uma função da seqüência de valores de reforço até um tempo T
final. No caso mais simples é um somatório, como aparece na equação seguinte:
TtttT rrrrR ++++= +++ L321 . A.5
Em muitos casos a interação entre agente e ambiente não termina
naturalmente em um episódio, mas continua sem limite, por exemplo, como em

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
166
tarefas de controle contínuo. São chamadas de tarefas contínuas. Para estas tarefas
a formulação do retorno é um problema pois T = ∞ , e o retorno que se deseja
maximizar também detenderá ao infinito.
Para estes problemas foi criada a taxa de desconto γ, que torna o cálculo do
retorno mais complexo conceitualmente, mas simplifica matematicamente.
A taxa de desconto γ determina o grau de influência que têm os valores
futuros sobre o reforço total, denotada pelo símbolo 10 ≤≤ γ . Assim, a expressão
do retorno aplicando taxa de desconto é expressa pela seguinte equação:
∑∞
=+++++ =+++=
013
221
kkt
ktttt rrrrR γγγ L A.6
onde se 0→γ , o agente tem uma visão míope dos reforços, maximizando apenas
os reforços imediatos, e se 1→γ , o agente abrange todos os estados futuros.
Um sistema de RL faz um mapeamento de estados em ações baseado nos
reforços recebidos. Assim, o objetivo do Reinforcement Learning é definido
usando-se o conceito de função de reforço, a qual é uma função dos reforços
futuros que o agente procura maximizar. Ao maximizar a função de reforço, o
objetivo será alcançado de forma ótima.
A função de reforço define quais são os bons e maus eventos para os
agentes. Em sistemas biológicos não seria inapropriado identificá-los com prazer e
dor.
Funções de Reforço
As funções de reforço podem ter diferentes graus de complexidade, mas
existem algumas formas básicas de defini-las: reforço só no estado final, tempo
mínimo até o objetivo, minimizar reforços e reforço imediato.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
167
a. Reforço só no estado final
Neste tipo de função de reforço, os valores de reforço são zero para todos os
estados, exceto no estado terminal em que o valor é 1. Adicionalmente, há
reforços para estados que devem ser evitados. Assim, o sinal do valor de reforço
indica se o estado é desejado ou deve ser evitado. Este tipo de definição de
função de reforço foi utilizada por Tesauro no jogo do Gamão (Backgammon)
(Tesauro, 1995), no qual o conjunto de posições no tabuleiro do jogo representa
os estados; o conjunto de movimentações permitidas, a partir de uma posição no
tabuleiro, define as ações disponíveis para esse estado; e a função de reforço é
definida como segue:
⎪⎩
⎪⎨
⎧+= +
+
+
casooutroqualquer 0jogooperderfazse1-jogooganharfazse1
11 t
1t
t ss
r
b.Tempo mínimo até o objetivo
As funções de reforço deste tipo fazem com que o agente execute ações que
forneçam os caminhos mais curtos ou os mais rápidos até um objetivo desejado.
c. Minimizar reforços
Nos dois casos anteriores é suposto que o agente tenta maximizar a função
de retorno. O agente, no entanto, também pode minimizá-la. Este é um caso onde
o reforço é obtido em função de recursos limitados no ambiente , e o agente deve
aprender a conservar esses recursos.
d. Reforço Imediato
Quando as ações do agente não influenciam a transição de estados, então o
ideal é escolher uma ação que maximize o retorno como uma função do estado
corrente do agente. A classe de problemas descritos dessa forma são chamados de
Reinforcement Learning Associativo.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
168
e. Função de Valor
Uma questão existente no Reinforcement Learning é saber com certeza se o
agente está aprendendo a escolher boas ações, ou seja, ter uma maneira de medir a
utilidade de uma ação a tomar. Define-se uma função de valor como o
mapeamento do estado ou par estado-ação em um valor que é obtido a partir do
reforço atual e dos reforços futuros.
Se a função de valor considera só o estado s ela é representada por )(sV .
Se ela considera o par estado-ação ),( as , então a mesma é representada por
),( asQ .
Uma vez que os reforços futuros mantêm dependência das ações futuras, as
funções de valor dependem também da política π que o agente RL segue. Em um
Processo de Decisão de Markov se define uma função de valor )(sV π dependente
da política π como a equação A.7:
{ }⎭⎬⎫
⎩⎨⎧
==== ∑∞
=++
01)(
ktkt
ktt ssrEssREsV γππ
π A.7
onde a função de valor )(sV π é o valor esperado de retorno para o estado sst =
(estado atual), isto é, o somatório dos reforços aplicando-se a taxa de desconto γ .
Se consideramos o par estado-ação, a equação para a função de valor ),( asQπ
será a seguinte:
{ }⎭⎬⎫
⎩⎨⎧
====== ∑∞
=++
01 ,,),(
kttkt
kttt aassrEaassREasQ γππ
π A.8
que é semelhante à eq. A.7, só que considerando o reforço esperado para um
estado associado a uma ação (estado sst = e ação aat = ).
As equações A.7 e A.8 representam funções de valor )(sV π e ),( asQπ que
dependem exatamente dos valores de reforço, o que implica no conhecimento
completo da dinâmica do ambiente como um PDM. Desse modo, não é necessário
obter os valores exatos, podendo as funções de valor ser aproximadas usando se
qualquer tipo de aproximador de função. Neste ponto podem ser aplicadas redes

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
169
neurais (Haykin, 1998), ou algoritmos de predição a fim de obter-se uma
estimativa da função de valor.
A.5 Métodos do Reinforcement Learning
Para solucionar o problema de Reinforcement Learning, existem três classes
de métodos fundamentais: A Programação Dinâmica, Métodos de Monte Carlo e
Métodos de Diferenças Temporais.
Cada um destes métodos apresentam vantagens e desvantagens:
Programação Dinâmica (Bellman, 1957) possui um bom desenvolvimento
matemático, mas exige uma modelagem bem precisa do ambiente como um
Processo de Decisão de Markov. Os métodos de Monte Carlo (Rubinstein, 1981)
não precisam da modelagem do ambiente e se apresentam de forma simples em
termos conceituais. Entretanto, não são viáveis quando a solução do problema é
possível apenas de forma incremental (utilizando somente o estado atual e os
estados imediatos), porque para se atualizar os métodos de Monte Carlo exigem
que o estado final seja alcançado no processo. Os métodos de Diferenças
Temporais não exigem um modelo exato do sistema e permitem ser incrementais,
mas são complexos de se analisar. Nas subseções seguintes cada um dos métodos
será analisado separadamente.
Programação Dinâmica (DP)
Programação Dinâmica (Bellman, 1957) é uma coleção de algoritmos que
podem obter políticas ótimas sempre que existir uma modelagem perfeita do
ambiente como um Processo de Decisão de Markov (PDM), isto é, como um
conjunto de estados, ações, retornos e probabilidades de transição em todos os
estados. Os algoritmos clássicos de DP são usados de forma limitada no

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
170
Reinforcement Learning, uma vez que a modelagem perfeita do ambiente como
PDM inclui um grande custo computacional. Porém, a Programação Dinâmica
fornece um bom fundamento para o conhecimento dos outros métodos usados na
solução do problema de RL.
Partindo do pressuposto de que o ambiente é completamente modelado
como um Processo de Decisão de Markov, isto é, como um conjunto de estados
S , ações )(sA , onde Ss∈ , as dinâmicas do sistema são dadas por um conjunto
de probabilidades de transição de estado, { }aassssP ttta
ss ==== + ,'Pr 1' , e por
um conjunto de reforços imediatos esperados, { }',,E 11' ssssaarR ttttass ==== ++ ,
para todo Sss ∈', , )(sAa∈ .
A Programação Dinâmica organiza e estrutura a busca de boas políticas a
partir das funções de valor. Deste modo, políticas ótimas são obtidas sempre que
funções de valor ótimas são obtidas. Usualmente, as funções de valor ótimas são
denotadas por )(* sV ou ),(* asQ , as quais satisfazem às equações de otimização
de Bellman (19l57), como é expresso nas eq. A.9 e eq. A.10, respectivamente:
{ }
[ ],)'(max
,)(max)(
'
*''
1*
1*
∑ +=
==+= ++
s
ass
assa
tttta
sVRP
aasssVrEsV
γ
γ A.9
{ }
[ ]∑ +=
=== ++
'
*
'''
1*
'1*
)','(max
,)',(max,),(
s a
ass
ass
tttat
asQRP
aassasQrEasQ
γ
γ A.10
Na eq. A.9 a função de valor ótimo )(* sV é encontrada como o máximo das
funções de valor esperadas segundo a ação selecionada, a .
Atualização da função de valor e da política

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
171
Para atualizar as funções de valor com a finalidade de melhorar a política,
utiliza-se a iteração de valores (Sutton & Barto, 1998). A função de valor )(1 sVk+
do estado s para o passo 1+k de avaliação é dada pela eq. A.11:
{ }aasssVrEsV tttktak ==+= +++ ,)(max)( 111 γ A.11
onde o valor atualizado )(1 sVk+ é encontrado a partir dos valores armazenados no
passo k da seqüência de iterações, aplicando a equação de otimização de Bellman
(eq. A.9). Esta seqüência de iterações deve alcançar no ponto final a política ótima
)(* sV (Bertsekas, 1987).
O método de procura da política ótima da Programação Dinâmica exige a
varredura de todos os estados no espaço de estados do modelo PDM, tendo grande
custo computacional para modelagens complexas, o que torna o método
desvantajoso em muitos casos.
Métodos de Monte Carlo (MC)
Os métodos de Monte Carlo são uma forma de resolver o problema de
Reinforcement Learning, baseando-se no cálculo da média de uma amostra de
reforços. Para se assegurar que exista um valor de retornos bem definido, os
métodos de Monte Carlo são utilizados apenas para tarefas episódicas, isto é, se
assume que a experiência é dividida em episódios que de algum modo alcançam o
estado final sem depender das ações que foram selecionadas. Desta forma,
somente depois da conclusão de um episódio o valor de retorno é obtido e as
políticas são atualizadas.
Uma vantagem dos métodos de Monte Carlo é que necessitam apenas das
amostras da experiência como seqüências de dados, ações e reforços a partir de
uma interação real ou simulada com o ambiente.
O aprendizado a partir de experiência real é notável, dado que não exige o
conhecimento a priori das dinâmicas do ambiente e, ainda, pode levar a um
comportamento ótimo. Embora seja requerida uma modelagem, esta requer apenas

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
172
que algumas transições de estados sejam geradas, sem precisar de todo o conjunto
de distribuições de probabilidade para todas as possíveis transições, como é
exigido para um modelo que aplica Programação Dinâmica.
Avaliação da política
Supondo-se que o método de Monte Carlo é considerado para obter uma
função de valor sob uma dada política, que é representada pelo retorno esperado,
isto é, a acumulação descontada dos futuros reforços desde o estado s até o estado
desejado, uma forma de se aproximar do valor de retorno esperado a partir da
experiência é calcular a média dos retornos após visitar esse estado. Na medida
em que mais retornos são observados, a média deve se aproximar do valor real
esperado, sendo esta conseqüência uma idéia própria dos métodos de Monte
Carlo.
Suponha )(sV π a função de valor sob a política π . Dado um conjunto de
episódios obtidos sob a mesma política π passando pelo estado s, existem duas
variantes do método de Monte Carlo: a primeira obtém a média dos retornos após
todas as visitas ao estado s, enquanto a segunda variante os obtém desde a
primeira vez que o estado s é visitado.
De qualquer forma, se o número de visitas for infinito, ambas as variantes
do MC convergem ao valor )(sV π .
Atualização da política
A fim de melhorar a política é necessário fazer com que esta seja mais
ambiciosa para a função de valor )(sV π atual. Neste caso é conveniente assumir
como valor de retorno a função de valor do par estado-ação ),( asQπ . Assim, uma
política ambiciosa para uma função de valor ),( asQ é aquela que, para um estado
s , toma a ação que maximiza o valor Q como na equação A.12
),(maxarg)( asQsa
=π A.12

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
173
Desta forma, uma melhora na política pode ser obtida fazendo-se a política
1+kπ ser ambiciosa em respeito à função de valor kQπ , logo após a avaliação da
função de valor Q, como se vê na Figura A.3:
**110
10 QQQQ AMk
MAAMA k ⎯→⎯⎯→⎯⎯→⎯⎯→⎯⎯→⎯⎯→⎯⎯→⎯ + ππππ πππ LL
Figura A.3 - Seqüências de avaliação da função e melhora da política.
Aqui o processo começa com uma política aleatória 0π , obtendo uma
função de valor inicial 0πQ . O símbolo ⎯→⎯A representa a avaliação da política,
enquanto o símbolo ⎯→⎯M representa a melhora na política. Segundo este
processo, se o número de episódios é muito grande, a função de valor se
aproximará à função de valor ótima *Q .
Métodos de Diferenças Temporais
O método de Diferenças Temporais (TD) resulta da combinação das idéias
do método de Monte Carlo com as idéias da Programação Dinâmica. O
aprendizado é feito diretamente a partir da experiência, sem a necessidade de uma
modelagem PDM completa do ambiente, como característica do método de Monte
Carlo, e atualizar suas estimativas com base em outras estimativas já aprendidas
em estados sucessivos, nem necessitar alcançar o estado final de um episódio
antes da atualização, como é característico em DP.
Neste caso, a avaliação de uma política é abordada como um problema de
predição, isto é, de estimar a função de valor πV sob a política π .
Predição TD
Tanto TD como MC utilizam a experiência para resolver o problema da
predição. Dada certa experiência sob a política π , se um estado intermediário ts
é visitado ambos os métodos atualizam suas estimativas )( tsV baseando-se no

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
174
acontecido depois de visitado o estado, sendo que o método de Monte Carlo
espera até que o retorno total seja conhecido. Dessa forma, esse retorno é pré-
requisito para a atualização de )( tsV , como aparece na equação A.13.
[ ])()()( tttt sVRsVsV −+← α A.13
onde tR representa o retorno real no tempo t , e o símbolo α é uma constante de
atualização. Para obter o valor de retorno tR é necessário alcançar o estado final
do episódio para logo depois, atualizar o valor )( tsV .
Os métodos de Diferenças Temporais não precisam alcançar o estado final
de um episódio, mas o estado seguinte no tempo 1+t . Em TD são utilizados o
valor de reforço imediato 1+tr e a função de valor estimada )( 1+tsV ao invés do
valor real de retorno tR do Método de Monte Carlo. Com estas condições, no
método de Diferenças Temporais a eq. A.13 converte-se na eq. A.14.
[ ])()()()( 11 ttttt sVsVrsVsV −++← ++ γα A.14
onde o objetivo para atualização é o valor )()( 11 ttt sVsVr −+ ++ γ que define
precisamente a diferença no tempo t e 1+t , característica esta que neste método
toma o nome de Diferenças Temporais. Como a atualização é feita somente a
partir do estado seguinte, os métodos TD são conhecidos como métodos single-
step.
Vantagens dos métodos de predição TD
Os métodos de TD apresentam vantagens sobre os métodos de Programação
Dinâmica e métodos de Monte Carlo.
A vantagem mais notável do método TD é a relacionada com o método de
Programação Dinâmica: TD não necessita uma modelagem PDM do ambiente, de
seus retornos e das distribuições de probabilidade das transições dos seus estados.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
175
A vantagem seguinte diz respeito ao método de Monte Carlo, visto que TD
pode ser implementado de forma totalmente incremental para aplicações On-Line;
os métodos de Monte Carlo devem aguardar até o final de um episódio para obter
o retorno verdadeiro, enquanto TD só necessita aguardar até o estado seguinte.
Em aplicações em que os ambientes são definidos como sendo contínuo, o
conceito de episódio não é aplicável com facilidade.
Embora as atualizações das funções de valor não sejam feitas a partir de
retornos reais, mas de valores supostos, é garantida a convergência até a resposta
correta. Tanto em TD como em MC a convergência às predições corretas tem
forma assintótica. Dentre os dois métodos, algum deles deve convergir mais
rápido; a resposta ainda não é dada formalmente, uma vez que até agora não existe
uma demonstração matemática de qual dos métodos é o mais rápido. Mesmo
assim, é demonstrado experimentalmente que os métodos TD são mais rápidos
para tarefas estocásticas (Tsitsiklis, 1994).
Q-Learning
Um dos mais importantes avanços na área de Reinforcement Learning foi o
desenvolvimento de um algoritmo baseado em Diferenças Temporais que
dispensa a política, (off-policy methods) conhecido como Q-Learning (Watkins,
1989). A versão mais simples, One-step Q-Learning, é definida pela seguinte
expressão:
)]a,s(Q)a,s(Qmaxr[)a,s(Q)a,s(Q tt1ta
1ttttt −++← ++ γα A.15
onde a função de valor do estado atual ),( tt asQ é atualizada a partir do seu valor
atual, do reforço imediato 1+tr , e da diferença entre a máxima função de valor no
estado seguinte (encontrando e selecionando a ação do estado seguinte que a
maximize) e o valor de função do estado atual no tempo atual. O fato de
selecionar a ação que maximize a função de valor seguinte permite achar de uma
forma simples a função de valor estimada.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
176
Uma característica do Q-Learning é que a função de valor Q aprendida
aproxima-se diretamente da função de valor ótimo *Q sem depender da política
que está sendo utilizada. Este fato simplifica bastante a análise do algoritmo e
permite fazer testes iniciais de convergência. A política ainda mantém algum
efeito ao determinar qual dos pares estado-ação deve-se visitar e atualizar. A
convergência exige que todos os pares estado-ação sejam visitados, fazendo com
que Q-Learning seja um método off-policy (Tsitsiklis, 1994).
O algoritmo Q-Learning é mostrado de forma seqüencial na figura seguinte:
Figura A.4 - Algoritmo Q-Learning
Q-learning foi o primeiro método RL a possuir fortes provas de
convergência (Jaakkola et. al., 1994). É uma técnica muito simples que calcula
diretamente as ações sem avaliações intermediárias e sem uso de modelo.
Dados os valores Q, existe uma política definida pela execução da ação a,
quando o agente está em um estado s, que maximiza o valor Q(s,a). Watkins
(1989) mostrou que se cada par estado-ação for experimentado um número
suficientemente grande de vezes e α decrescer apropriadamente, as funções de
valores-Q irão convergir com probabilidade um para Q* e a política irá convergir
para uma política ótima.
Inicializar ),( asQ em forma arbitrária
Repete (para cada episódio):
Inicializar s
Repete (para cada passo do episódio):
Escolher a para s usando política obtida dado Q
(p.e, ε -greedy)
Tomar a ação a , observar r , 's
⎥⎦⎤
⎢⎣⎡ −++← ++ ),(),(max),(),( 11 ttt
attttt asQasQrasQasQ γα
'ss ←
até s ser o estado final

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
177
Alguns autores definem Q-learning como a fusão dos dois módulos do
método AHC (Kaelbling et. al., 1996), sendo por isso mais fácil de implementar
do que a arquitetura AHC.
A convergência do algoritmo Q-learning não depende do método de
exploração usado. Um agente pode explorar suas ações a qualquer momento – não
existem requisitos para a execução de ações estimadas como as melhores. No
entanto, para melhorar o desempenho do sistema é necessária, durante o
aprendizado, a busca das ações que maximizam o retorno.
Existem duas classes principais de algoritmos TD: on-policy e off-policy.
Métodos on-policy avaliam ou melhoram a política que está sendo usada para
tomar decisões, enquanto métodos off-policy avaliam ou melhoram uma política
diferente daquela que está sendo seguida. No aprendizado off-policy, a política
usada para selecionar as ações é chamada política de comportamento (behavior
policy) e a política que está sendo melhorada é chamada de política de estimação
(estimation policy). Em aprendizados on-policy existe uma única política que é
usada para escolher as ações durante o período em que está sendo aprimorada. Os
dois tipos de política usam métodos estocásticos para escolher ações, como por
exemplo a política ∈-greedy.
A política ∈-greedy é definida no algoritmo pela escolha da ação que possui
o maior valor esperado, com probabilidade definida por (1-∈), e de ação aleatória,
com probabilidade ∈ . Este processo permite que o algoritmo explore o espaço de
estados e esta é uma das condições necessárias para garantir que algoritmos RL
encontrem a ação ótima.
Resumidamente, pode-se enumerar os mais importantes aspectos do algoritmo
Q-Learning:
• O objetivo do uso do algoritmo Q-Learning é achar uma regra de
controle que maximize cada ciclo de controle.
• O uso do reforço imediato é indicado sempre que possível e necessário,
desde que ele contenha informação suficiente que ajude o algoritmo a
achar a melhor solução.
• Q-Learning é adotado quando o número de estados e ações a serem
selecionadas é finito e pequeno.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
178
SARSA - on-policy
O algoritmo TD mais simples considerando a política (on-policy) derivado
do método Q-learning chama-se SARSA (Sutton & Barto, 1998; Rummery &
Niranjan, 1994). Este nome tem origem em State, Action, Reward, State, Action,
que vêm a ser os elementos <st,at,rt+1,st+1,at+1> considerados na atualização do
valor Qs(s,a), como mostra a eq. A-16 abaixo:
)],(),(),([),(),( 11 ttttttttttt asQasQasrasQasQ −++= ++γα A.16
Figura A.5 - Algoritmo SARSA
SARSA converge com probabilidade 1 para a política ótima e para uma
função de valor da ação se cada par (estado-ação) for visitado um número infinito
de vezes e o valor da probabilidade ∈ for reduzido ao longo do aprendizado.
Sutton & Barto (1998) mostraram que sob as mesmas condições de ∈-greedy o
algoritmo SARSA apresenta desempenho on-line melhor do que o algoritmo Q-
learning. Se o parâmetro ∈ for reduzido gradualmente ambos os algoritmos (Q-
learning e SARSA) convergem assintoticamente para a política ótima.
Inicialize Q(s,a) de forma arbitrária
Repita para cada ciclo
Inicialize s
Repita para cada passo no ciclo
Escolha a ação a no estado s usando uma política derivada de Q (ex. e-greedy)
Execute a ação a, observe o retorno r e o estado s´
Escolha a ação a´em s´ usando uma política derivada de Q (ex. e-greedy) )],(´)´,([),(),( asQasQrasQasQ −++= γα
s ← s´ e a ← a´ até s seja o estado final ou objetivo

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
179
Exploration/Exploitation
A busca de novas soluções alternativas pode representar um risco ao
desempenho desejado, mas a permanência em uma mesma política pode não levar
ao desempenho ótimo.
Métodos RL normalmente incluem um processo estocástico de seleção de
ações que permite exploração do espaço de estados (Sutton & Barto, 1998).
Pode-se distinguir duas formas básicas de exploração. Na primeira, os
sistemas exploram sem memória, ou seja, sem manter o conhecimento já
adquirido (exploration), não existindo tentativa de se usar o que foi aprendido
para melhorar a performance – o objetivo é aprender os valores de Q. Na segunda
forma, os sistemas exploram com memória, ou seja, usam o conhecimento já
adquirido (exploitive). Como ambas as formas trazem, em momentos específicos,
benefícios à solução dos problemas, uma boa estratégia é mesclar exploration e
exploitation. Sendo assim, um agente deve escolher suas melhores ações com
probabilidade px (exploitive) e escolher qualquer outra ação usando métodos que
visam exploration com probabilidade 1-px. O valor da probabilidade de
exploitation px deve aumentar lentamente ao longo do aprendizado.
O valor da probabilidade px pode ser definido de diversas forma. A forma
mais utilizada é a que usa a distribuição de probabilidade de Boltzmann. Nela, o
valor esperado para a ação a no estado s é usado para escolher probabilisticamente
a ação de acordo com a equação de distribuição de probabilidades (Boltzmann)
(eq. A-17):
∑ =
= nb
bstQ
astQ
eeasP
1/),(
/),(),(
τ
τ
A.17
O parâmetro τ pode decrescer ao longo do aprendizado de forma que a
exploração também decresça. O parâmetrou n representa o número total de ações
associadas ao estado s. Este método não é indicado quando os valores das ações
são muito próximos. Também pode acarretar uma convergência mais lenta, a
menos que τ seja modificado adequadamente ao longo do aprendizado.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
180
O processo de aprendizado do agente deve tentar equilibrar as alternativas
exploration/exploitation (Kaelbling et. al., 1996).
O algoritmo Q-learning utiliza uma tabela para mapear estados/ações.
Quando o espaço de estados é muito grande e/ou contínuo, o método torna-se
inviável. Este problema é denominado na literatura como curse of dimensionality.
Método AHC (Adaptive Heuristic Critic)
O método AHC (Adaptive Heuristic Critic) é um método baseado em
Diferença Temporal (Temporal Difference- TD) e possui dois componentes, o
crítico (Adaptive Critic Element) e o ator (Associative Search Element). Este
método usa uma estrutura separada para representar explicitamente a política,
independentemente da função de valor. O módulo da política é o ator, porque ele
seleciona as ações; o módulo do crítico é responsável pela estimação da função
do valor, e a sua função é criticar as ações realizadas pelo ator. O aprendizado é
do tipo on-policy, onde o crítico deve aprender a política e criticar se ela está ou
não sendo seguida pelo ator. A crítica é um sinal escalar conhecido na saída do
módulo do crítico (Sutton & Barto, 1998).
A figura A-6, mostra o diagrama da arquitetura AHC. Nela, o crítico,
representa uma função de avaliação mais elaborada do que a função de retorno (r)
dada pelo ambiente. O módulo do ator visa maximizar o valor heurístico v, que é
computado pelo módulo crítico. O crítico usa o sinal de reforço externo para
aprender a mapear estados em valores esperados dados pela política que está
sendo executada no componente ator (Kaelbling et. al., 1996). Sob a ótica da
teoria de Programação Dinâmica, esta função de valor tem a intenção de ser uma
função de valor ótima, ou seja, deseja-se que a função de valor do estado seja
associada a uma política ótima.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
181
Figura A.6 - Algoritmo Q-Learning
Com o objetivo de reduzir os efeitos do temporal credit-asssignment
problem (Sutton, 1994), o sinal de reforço usado pelo ator não é o reforço dado
pelo ambiente e sim um sinal de reforço interno gerado pelo módulo crítico,
reduzindo as incertezas no aprendizado do ator. O aprendizado no módulo ator
visa a seleção de ações que levem a avaliações ótimas do módulo crítico, e que,
assim, uma política ótima seja encontrada (Jouffe, 1998). Durante o aprendizado,
ambos os módulos, da função de valor (crítico) e da política (ator), são ajustados
(Ribeiro, 1999).
O módulo da função de valor pode atualizar seus valores segundo o
algoritmo TD(0) usando a eq. A-18 (Kaelbling et. al., 1996) ou usar a eq. A-16
seguindo o algoritmo SARSA:
))'(()()1( sVrsV ππ γαα ++− A.18
Quando o estado s é visitado pelo agente, seu valor estimado é atualizado
para tornar-se o mais próximo de )'(sVr πγ+ , onde r é o retorno instantâneo
recebido do ambiente, )'(sVπ é o valor estimado para a função de valor do
próximo estado, α é a taxa de aprendizado, variando entre (0 ≤ α ≤ 1) e o fator de
desconto γ define a influência do valor associado ao estado s´ no valor atual
Ambiente
Função de valor
Política
estado
ator
crítico
TD-erro
recompens
ação

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
182
estimado. Se o valor do parâmetro α decrescer lentamente durante o aprendizado,
TD(0) irá convergir Vπ para o valor ótimo associado a cada estado, quando uma
política π for aplicada e cada estado for amostrado um número suficiente de
vezes.
As ações a que causam a transição do estado s para o estado s’ não são
determinadas a partir da comparação dos resultados com os valores obtidos
através da execução de outras ações off-line, e sim computadas on-line como saída
do módulo da política. Os parâmetros do módulo da política são atualizados de
acordo com um método que encoraja ou não a ação atual.
O módulo da política é atualizado por um método que recompensará ou
punirá a ação tomada, se o valor V´(s) atualizado é menor ou maior que V(s).
O sucesso do método AHC está fortemente atrelado à escolha de boas
funções de avaliação usadas no módulo crítico.
Métodos que incluem eligibility traces
Eligibility traces (Singh & Sutton, 1996) é um dos mecanismos básicos no
Reinforcement Learning, podendo ser abordado de duas formas.
A partir de uma visão mais teórica, eligibility traces podem ser definidos
como intermediários entre os métodos de Diferenças Temporais e o método de
Monte Carlo, isto é, este método exige mais do que estados imediatos (para o caso
de TD) e exige menos quando não prescinde que o sistema alcance o estado final
(caso Monte Carlo). Assim, quando são inseridos em um método TD qualquer, é
produzida uma família de métodos que varrem um espectro no qual um dos
extremos é o método de Monte Carlo, e o outro, os métodos de Diferenças
Temporais one-step.
Os métodos intermediários resultantes entre aqueles dois, com visões
intermediárias dos estados, são quase sempre mais eficientes do que os métodos
extremos. Neste sentido, a utilização de eligibility traces unifica os métodos de
Monte Carlo e Diferenças Temporais, de uma forma valiosa e interessante
(Sutton, 1998).

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
183
Numa visão mais prática, eligibility traces são registros temporários da
ocorrência de algum evento, como a visita de um estado ou a seleção de uma ação.
Assim, este parâmetro gera um valor de memória associado com os eventos
elegíveis para as mudanças posteriores do aprendizado.
TD(λ)
Em princípio TD(λ) resulta da combinação do método de diferenças
temporais TD, que por conveniência será representado como TD(0), com
eligibility traces, obtendo características intermediárias entre o método TD e o
método de Monte Carlo. Como já foi explicado, o método de Monte Carlo faz
suas atualizações a partir do reforço real obtido quando, em um episódio, se
alcança o estado final. No entanto, TD faz a atualização apenas com o reforço
obtido com o estado seguinte. Então em um dado tipo de método intermediário, a
atualização é dada por um número intermediário de reforços.
Tudo isto é precisamente a função do TD(λ), para 10 << λ . Diferentemente
dos métodos single step, como o TD(0) ou Q-Learning, o TD(λ) obtém a
atualização das funções de valor a partir de uma ponderação exponencial dos
valores nos estados futuros. O parâmetro λ, que é o grau de uso de eligibility
traces, corresponde à taxa de ponderação exponencial. Assim, se 0=λ , o
algoritmo resultante, TD(0), é exatamente o algoritmo incremental one-step TD.
Se 1=λ , o algoritmo resultante TD(1) obtém a atualização do valor de um estado
somente a partir dos valores do estado final, como no método de Monte Carlo.
Para entender melhor como valores de estados sucessivos influem na
atualização das funções de valor, existem duas visões do processo: uma visão para
frente e uma visão para trás.
Visão para Frente
Na visão para frente, sendo a mais teórica, o retorno pode ser obtido como
uma média ponderada de retornos de n-passos futuros chamada λtR (Watkins,
1989), que contém todos os retornos )(ntR de um passo, dois passos, até n-passos,
sendo seus pesos proporcionais ao fator 1−nλ , onde 10 ≤≤ λ . A inserção do fator

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
184
)1( λ− permite normalizar o resultado para que o somatório dos pesos seja 1.
Assim, o retorno λtR pode ser expresso da seguinte forma:
∑∞
=
−−=1
)(1)1(n
nt
nt RR λλλ A.19
e, considerando o estado final, se este é alcançado, o retorno λtR tem a seguinte
expressão:
∑−−
=
−−− +−=1
1
1)(1)1(tT
nt
tTnt
nt RRR λλλλ A.20
Se 0=λ , a equação reduz-se ao reforço do estado seguinte, como TD(0),
mas se 1=λ , o retorno resultante é apenas o retorno normal de estado final,
utilizado no método de Monte Carlo.
Então, a partir da equação A.16 de retorno, pode aplicar-se uma equação de
atualização com o formato da função de valor A.13 para o novo valor de retorno
mostrado na equação A.17,
[ ])()()( tttttt sVRsVsV −+= λα A.21
que é semelhante à equação de atualização de Monte Carlo, sendo a única
diferença o retorno utilizado.
A visão à frente é fácil de entender, uma vez que a base matemática
associada é fornecida pelos métodos de Monte Carlo e Diferenças Temporais sem
maiores variações, mas existe o problema de determinar o valor do retorno λtR
que depende de reforços futuros.
Visão para Trás
Na visão para trás, é aplicado um fator de memorização de estados passados,
que são eligibility traces, representados por )(set (que é um tipo escalar, como

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
185
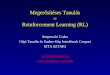
explicado no inicio desta seção). Em cada passo, os estados )(set decaem com a
taxa λγ e, para o estado visitado, o valor de )(set é incrementado em 1, ou pode
também fazer-se 1)( =set , como na expressão a seguir,
⎩⎨⎧
=+≠=
−
−
tt
ttt ssifse
ssifsese 1)()()(
1
1γλγλ A.22
Figura A.7 - Eligibility traces acumulados
a qual é aplicável para todos os estados não terminais, onde γ é a taxa de
desconto e λ é o mesmo parâmetro na visão à frente. A cada momento, eligibility
traces armazenam os estados que foram visitados recentemente, onde o grau de
tempo é expresso pelo fator γλ . Assim, eligibility traces permitem indicar o grau
de influência de cada estado nas mudanças associadas quando é recebido um
reforço.
Nesta visão, o erro da diferença temporal mantém a atualização
proporcional com os estados mais recentes da seguinte forma:
)()( sesV ttt αδ=∆ A.23
onde tδ é a própria diferença temporal expressa na Equação A.24 a seguir,
)()( 11 tttttt sVsVr −+= ++ γδ A.24
eligibility traces acumulados número de visitas a um estado

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
186
onde os incrementos são feitos a cada passo do algoritmo podendo ser de tipo
incremental para algoritmos on-line, ou de tipo episódico para algoritmos off-line.
A figura A.8, a seguir, mostra o algoritmo do TD(λ).
Inicializar )(sV aleatório, 0)( =se , para todo S∈s
Repetir (por episódio):
Inicializar s
Repetir (por episódio):
←a ação tomada sob π para s
Tomar a ação a , observar o reforço r e o estado seguinte, 's
1)()()()'(
+←−+←
sesesVsVr γδ
Para todo s :
)()()()()(
sesesesVsV
γλαδ
←+←
'ss ←
até s ser o estado terminal
Figura A.8 - Algoritmo TD(λ) on-line para a estimação de πV
Na segunda abordagem o TD(λ) está orientado a checar em cada passo o
erro TD do passo anterior, e atribuir este erro a cada estado prévio segundo o
valor do eligibility trace associado ao estado nesse momento.
SARSA (λ)
A idéia em geral é aplicar a predição do TD(λ) para pares estado-ação ao
invés de estados apenas. Supondo ),( aset como o e-trace para o par ( as, ), então,
a inserção de eligibility traces na equação de atualização do SARSA (eq. A.16),
é feita como indicado na eq. A.25 a seguir e, o algoritmo é exibido na figura A-9.

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
187
),(),(),(),(),(
casos outros),( e Se1),(
),(
1
111
1
1
aseasQasQasQasQr
aseaassase
ase
tttt
tttttttt
t
tttt
αδγδ
γλγλ
+=−+=
⎩⎨⎧ ==+
=
+
+++
−
−
A.25
Q(λ)
Figura A.9 - Algoritmo SARSA(λ)
Pode-se ver no algoritmo SARSA(λ) que a atualização é similar à do
algoritmo TD, com a diferença que são usadas as funções de valor ),( asQ para o
par (estado, ação) ao invés da função de valor )(sV para o estado apenas.
Q(λ)
Para combinar eligibility traces com o algoritmo Q-Learning foram
propostos três métodos: o Watkins Q(λ), proposto pelo próprio Watkins (1989),
que desenvolveu o algoritmo Q-Learning; e o Peng Q(λ) desenvolvido por Peng
final estado o seja que Até ;
a)e(s, λ γ),( a)e(s, δ α),(),(
: todoPara 1
),(),( greedy)-(e de derivada política a usando em Escolha
, observe , ação a Execute :episódio) do passo cada (para Repita
, Inicialize :episódio) cada (para Repita
, todopara ,0, e mentearbitraria , Inicialize
saass
aseasQasQ
s,ae(s,a)e(s,a)
asQasQrQsa
sra
as
asa)e(sa)Q(s
′←′←←
+←
+←−′′+←
′′′
=
γδ

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
188
& Williams (1994) e Naïve Q(λ). A idéia em geral, também como no método
SARSA, é inserir eligibility traces equação de atualização do Q-Learning (eq.
A.15). No entanto, este algoritmo é off-policy, ou seja, a política aprendida não é
necessariamente a mesma que é usada para selecionar as ações. O Q-Learning
aprende através de uma política greedy, enquanto segue uma política que envolve
exploração de ações. Devido a isto, um cuidado especial deve ser tomado quando
o eligibility traces é introduzido.
O método de Watkins torna zero o valor do e-trace depois de ações non-
greedy são escolhidas, de forma a não usar infomações non-greedy no
aprendizado de ações envolvidas com políticas greedy. A equação A-26 é
utilizada para atualização das funções de valores das ações e a figura A. mostra o
algoritmo Q-Watkins(λ).
A.26
),(),(max),(),(),(
casos outros),(max),( if
),(max),(,, if
),(0
),(1),(
11
1
11
11
1
1
tttttatt
tttt
ttattt
ttattttt
t
t
t
asQasQraseasQasQ
asQasQasQasQaass
ase
asease
−′+=
+=
⎪⎩
⎪⎨
⎧≠
===+=
+′+
+
−−
−−
−
−
γδαδ
γλ
γλ
final estado o seja que Até ;
0),( contrário Caso ),(),( Então , Se
),(),(),( : todoPara
1 ),(),(
) then max, ' (se ),(maxarg
greedy)-(e de derivada política usando em Escolha , observe , ação a Execute
:episódio) do passo cada (para Repita , Inicialize
:episódio) cada (para Repita, todopara ,0, e mentearbitraria , Inicialize
*
**
saass
aseaseaseaa
aseasQasQs,a
e(s,a)e(s,a)asQasQr
aaéabsQa
Qsasra
as
asa)e(sa)Q(s
b
′←′←←
←=′
+←
+←−′′+←
′←′←
′′′
=
γλ
αδ
γδ

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
189
Figura A.9 – Algoritmo Q-Watkins(λ)
O método de Peng apresenta alternativas para as desvantagens do método de
Watkins: no início do aprendizado, freqüentemente e(s,a)=0. Peng sugere um
método híbrido entre o usado por Watkins e o método SARSA de forma a nunca
interromper o trace. No entanto apresenta uma implementação bastante complexa
para uma descrição mais detalhada ver (Peng & Williams, 1994 e 1996).
NAÏVE(λ)
O método naïve é semelhante ao Q-Watkins(λ) exceto porque os e-traces
não são inicializados quando ações exploratórias são escolhidas. Este método tem
algumas vantagens do método de Peng, porém sem a complexidade da sua
implementação. Existem dúvidas se este método é realmente naïve.
Para nenhum desses métodos que utilizam eligibility traces existe prova de
convergência.
Eligibility Traces para AHC
O módulo crítico usa TD(λ) como o SARSA(λ) e o ator agrega o valor do
eligibility traces para cada par estado-ação para atualizar a política.
A equação de atualização da política passa a ser:
Replacing Traces
A.27),(),(),(1 aseaspasp tttt αδ+=+

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
190
Estados que são freqüentemente visitados podem ter e-traces maiores que 1,
o que eventualmente pode ser problema para o processo de convergência.
Replacing traces: torna e-trace=1 toda vez que o estado é visitado. A figura A.10
mostra um gráfico do valor e-trace associado a um estado ao longo de um
determinado período de tempo.
Figura A.10 – Algoritmo Q-Watkins(λ)
Conclusões para o uso de eligibility traces:
• Forma incremental de combinar TD e MC • Inclui as vantagens de MC (pouca propriedade Markov) • Inclui as vantagens de TD (usando erro TD, bootstrapping) • Pode acelerar o aprendizado • Aumenta custo computacional
Curse of Dimensionality
Como em MDP, os métodos baseados em DP Adaptativa lidam com
espaços de entrada discretos e a representação dos estados freqüentemente usa
tabelas (lookup table).
Quando os agentes são introduzidos em problemas do mundo real, um
grande conjunto de estados e ações são encontrados. Este problema de dimensão
torna o uso de tabelas (lookup table) inviável. Baseando-se na premissa de que
estados vizinhos apresentam funções de valor similares, um processo denominado
Número de vezes que o estado é visitado Accumulating traces Replacing traces

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
191
de generalização permite a modificação não apenas dos estados diretamente
relacionados a cada iteração, como também de outros estados afins. As
aproximações de funções representam a compactação dos estados para os quais a
generalização é uma propriedade emergente (Ribeiro, 1999).
Baseado nesta premissa, várias aproximações de funções têm sido usadas
em conjunto com Programação Dinâmica. As aproximações de funções
freqüentemente encontradas são CMAC (Watkins, 1989; Sutton, 1996; Singh &
Sutton, 1996), Redes Neurais (Berenji & Khedkar, 1992; Mitchell & Thrun, 1993;
Tesauro, 1992; Lin, 1992; Jouffe & Glorennec, 1996) e Lógica Fuzzy (Lee, 1991;
Berenji & Khedkar, 1992; Glorennec, 1994; Jouffe, 1998; Bonarini, 1996a;
Bonarini, 1996b).
Generalização
Segundo Ribeiro (1999), a generalização pode ocorrer em dois contextos
distintos. O primeiro é quando o uso de lookup table é possível, mas o
desempenho desejado é difícil de ser obtido. Este pode ser o caso quando o agente
está submetido a restrições de tempo durante o processo de aprendizado. Dessa
forma, mecanismos que generalizam as conseqüências de ações experimentadas
podem ser úteis.
O segundo contexto ocorre quando o agente está em um ambiente com um
espaço de estados muito grande, o que torna o uso de lookup table impossível.
Assim, as generalizações são necessárias e são implementadas como
aproximações de funções.
Em geral, a aproximação de funções associa estados ou características dos
estados com valores das ações. Nesses casos, a generalização é uma propriedade
emergente dessas funções. Uma dificuldade para se realizar a generalização está
em se identificar características similares em cada estado cujas métricas sejam
semelhantes. Isso motivou o uso de métodos de clustering ou splitting dos
estados.
A generalização em RL pode ser vista como um problema de structural-
credit assignment. Isso significa propagar parcialmente os valores através de

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
192
estados similares – enquanto o problema definido por temporal-credit assignment
(usado em algoritmos RL padrão) implicam em propagação temporal dos valores.
A generalização é um processo complexo porque não existem algoritmos de
aprendizado do tipo Diferença Espacial (“Spatial Difference”) (Ribeiro, 1999)
que possuam funções de valores conhecidas previamente.
Para solucionar o problema de memória decorrente de grandes espaços de
estados, foram feitas várias tentativas empregando Redes Neurais e algumas
obtiveram notável sucesso como, por exemplo, o jogo de damas de Samuels
(1959), o jogo de gamão (backgammon) de Tesauro (1990) e navegação do robô
de Lin (1992). No entanto, a combinação de RL com aproximação de função
também pode ser instável. Boyan e Moore (1995) listaram uma série de situações
empregando aproximações de função tais como regressão polinomial,
backpropagation e regressão local de pesos, onde a convergência podem falhar.
Gordon (1995), Thrun & Schwartz (1993) e Sabes (1993) enumeraram os motivos
para estas falhas ocorrerem (Pyatt & Howe, 1998).
Uma das razões destas falhas é que, para garantir a convergência, as
mudanças na aproximação de função devem estar localizadas no estado corrente
(Thrun & Schwartz, 1993; Singh & Ye, 1994; Sabes, 1993).
As falhas ocasionadas quando se usam Redes Neurais com algoritmo
backpropagation, ocorrem porque este tipo de aproximação de função não se
limita a mudanças locais, mas as mudanças na rede afetam outros estados, cujo
comportamento não está relacionado (Boyan & Moore, 1995; Baird, 1995). A
modificação da função para um conjunto de entradas pode ter grandes efeitos em
outros conjuntos de entrada. O aprendizado do valor de um estado ou de um par
estado-ação específico pode alterar o valor aprendido de algum outro estado,
causando falhas na convergência (Pyatt & Howe, 1998).
Kaelbling et. al. (1996) afirma que algumas pesquisas recentes (Gordon,
1995; Tsitsiklis & Roy, 1996) mostram que, com a escolha apropriada da
aproximação de função, pode-se garantir a convergência do modelo, não
necessariamente para valores ótimos. A técnica de gradiente residual usada por
Baird (1995) garantiu a convergência a soluções locais. Sutton (1996) mostra

Reinforcement Learning – Curso Tópicos Avançados
ICA/DEE-PUC-Rio Karla Figueiredo
193
como modificações na versão proposta por Boyan e Moore (Boyan & Moore,
1995) podem convergir com sucesso.
Na prática os experimentos têm produzido bons resultados, mas exigem
sensibilidade e habilidade ao associar aproximação de funções e RL (Gordon,
1995).
Uma questão ainda aberta é a que diz respeito às condições necessárias para
se garantir que a aproximação de função será bem sucedida. A teoria tem sido
escassa principalmente devido à dificuldade de se raciocinar sobre a aproximação
de função que generaliza sobre os dados observados (Gordon, 1995).
Sutton (1996) sugere alguns pontos a serem observados que podem ajudar a
combinar aproximação de funções e RL (Kaelbling et.al., 1996):
• Alterações pequenas nas especificações variáveis ao longo do
aprendizado;
• Aproximação de funções que tenha fraca generalização;
• O uso do algoritmo SARSA;
• Diferentes métodos de amostragem no processo de aprendizado.
Alguns pesquisadores (McCallum, 1995; Sutton, 1996; Kaelbling et. al.,
1996) sugerem que o uso de algum tipo de método baseado em árvores
estruturadas pode ser um bom caminho para a definição de uma boa aproximação
de função.