Embed Size (px)
Citation preview
1
RESPONSE OF A RECTANGULAR PLATE TO BASE EXCITATION
Revision E
By Tom Irvine
Email: [email protected]
April 10, 2013
Variables
mnA amplitude coefficient
a length
b width
D plate stiffness factor
E elastic modulus
h plate thickness
km wavenumber
M plate mass
xM bending moment
m, n, u, v mode number indices
Poisson's ratio
mass per volume
z relative displacement,
out-of-plane
mnZ normalized mode shape
nm participation factor
excitation frequency
mn natural frequency
mn modal damping
z relative displacement,
out-of-plane
w(t) base input acceleration
W() Fourier transform of
base input acceleration
),y,x(Z Relative displacement
),y,x(U Absolute Acceleration
2
Introduction
Consider the rectangular plate in Figure 1. Assume that it is simply-supported along each
edge.
Figure 1.
Normal Modes Analysis
Note that the plate stiffness factor D is given by
2
3
112
EhD
(1)
The governing equation of motion is
02t
z2h
4y
z4
2y2x
z42
4x
z4D
(2)
Assume a harmonic response.
)tjexp()y,x(Z)t,y,x(z (3)
a
b
Y
X 0

3
0)tjexp(Z2h)tjexp(4y
Z4
2y2x
Z42
4x
Z4D
(4)
0Z2h4y
Z4
2y2x
Z42
4x
Z4D
(5)
The boundary conditions are
0)y,x(xM,0)y,x(Z for x = 0, a (6)
0)y,x(yM,0)y,x(Z for y = 0, b (7)
Assume the following displacement function which satisfies the boundary conditions,
where c is an amplitude coefficient and m an n are integers.
b
ynsin
a
xmsinmnA)y,x(mnZ (8)
The partial derivates are
b
ynsin
a
xmcosmnA
a
mmnZ
x (9)
b
ynsin
a
xmsinmnA
2
a
mmnZ
2x
2 (10)
b
ynsin
a
xmcosmnA
3
a
mmnZ
3x
3 (11)
4
b
ynsin
a
xmsinmnA
4
a
mmnZ
4x
4 (12)
Similarly,
b
ynsin
a
xmsinmnA
4
n
nmnZ
4y
4 (13)
Also,
b
ynsin
a
xmsinmnA
2
a
n2
a
mmnZ
2y2x
2 (14)
0b
ynsin
a
xmsinmnA2h
b
ynsin
a
xmsinmnA
4
b
n2
b
n2
a
m2
4
a
mD
(15)
02h
4
b
n2
b
n2
a
m2
4
a
mD
(16)
4
b
n2
b
n2
a
m2
4
a
m
h
D2 (17)
4
b
n2
b
n2
a
m2
4
a
m
h
D (18)
5
2
b
n2
a
m
h
D (19)
Note that the wave numbers are
a/mmk (20)
b/nnk (21)
Normalized Mode Shapes
The mode shapes are normalized such that
1b
0
a
0dydx2)y,x(mnZh (22)
b
ynsin
a
xmsinmnAmnZ (23)
1b
0
a
0dydx
2
b
ynsin
a
xmsinmnAh
(24)
1b
0
a
0dydx
2
b
ynsin
a
xmsin2
mnAh
(25)
1b
0
a
0dydx
b
yn2cos1
a
xm2cos12
mnA4
h
(26)

6
1dyb
0
a
0a
xm2sin
xm2
ax
b
yn2cos12
mnA4
h
(27)
1dyb
0 b
yn2cos12
mnA4
ah
(28)
1
b
0b
yn2sin
yn2
by2
mnA4
ah
(29)
12mnA
4
abh
(30)
abh
42mnA
(31)
abh
4mnA
(32)
abh
2mnA
(33)
abhM (34)
M
2mnA (35)
Note that mnA is considered to be dimensionless, although the units must be consistent
within the analysis.

7
Participation Factors
The mass density is constant. Thus
b
0
a
0dydx)y,x(mnZhnm (36)
b
0
a
0dydx
b
ynsin
a
xmsinmnAhnm (37)
b
0
a
0dydx
b
ynsin
a
xmsinhmnAnm (38)
b
0
a
0dydx
b
ynsin
a
xmsin
M
h2nm (39)
b
0dy
a
0b
ynsin
a
xmcos
m
a
M
h2nm (40)
b
0dy
b
ynsin1mcos
m
a
M
h2nm (41)
b
0b
xncos
n
b1mcos
m
a
M
h2nm
(42)
1ncos1mcos2nm
ab
M
h2nm
(43)
8
1ncos1mcos2nm
1
M
M2nm
(44)
1ncos1mcos2nm
1M2nm
(45)
Effective Modal Mass
b
0
a
02dydx)y,x(mnZh
2b
0
a
0dydx)y,x(mnZh
mn,effm (46)
The modes shapes are normalized such that
1b
0
a
02dydx)y,x(mnZh (47)
Thus
2b
0
a
0dydx)y,x(mnZhmn,effm
(48)
2nmmn,effm (49)
9
Response to Base Excitation
The forced response equation for a plate with base motion is
2t
w2h
2t
z2h
4y
z4
2y2x
z42
4x
z4D
(50)
where w is base excitation.
The term on the right-hand-side is the inertial force per unit area.
The displacement is
q
1m
r
1n
)t(mnT)y,x(mnZ)t,y,x(z (51)
b
ynsin
a
xmsin
M
2)y,x(mnZ (52)
2t
w2h
2t
z2h
4y
z4
2y2x
z42
4x
z4D
(53)

10
2t
w2h
q
1m
r
1n
)t(mnT)y,x(mnZ2t
2h
q
1m
r
1n
)t(mnT)y,x(mnZ4y
4D
q
1m
r
1n
)t(mnT)y,x(mnZ2y2x
4D2
q
1m
r
1n
)t(mnT)y,x(mnZ4x
4D
(54)

11
2t
w2h
q
1m
r
1n
)t(mnT2t
2)y,x(mnZh
q
1m
r
1n
)t(mnT)y,x(mnZ4y
4D
q
1m
r
1n
)t(mnT)y,x(mnZ2y2x
4D2
q
1m
r
1n
)t(mnT)y,x(mnZ4x
4D
(55)
b
ynsin
a
xmsin
M
2)y,x(mnZ (56)
b
ynsin
a
xmsin
4x
4)y,x(mnZ
4x
4 (57)
)y,x(mnZ
4
a
m)y,x(mnZ
4x
4
(58)
b
ynsin
a
xmsin
2y2x
4)y,x(mnZ
2y2x
4 (59)
12
b
ynsin
a
xmsin
b
n
a
m)y,x(Z
yx
22
mn22
4
(60)
)y,x(mnZ
2
b
n2
a
m)y,x(mnZ
2y2x
4
(61)
b
ynsin
a
xmsin
4y
4)y,x(mnZ
4y
4 (62)
b
ynsin
a
xmsin
4
b
n)y,x(mnZ
4y
4 (63)
)y,x(mnZ
4
b
n)y,x(mnZ
4y
4
(64)
2t
w2h
q
1m
r
1n
)t(mnT2t
2)y,x(mnZh
q
1m
r
1n
)t(mnT)y,x(mnZD
4
b
n
q
1m
r
1n
)t(mnT)y,x(mnZD2
2
b
n2
a
m
q
1m
r
1n
)t(mnT)y,x(mnZD
4
a
m
(65)

13
2t
w2h
q
1m
r
1n
)t(mnT2t
2)y,x(mnZh
q
1m
r
1n
)t(mnT)y,x(mnZ
4
b
n2
b
n2
a
m2
4
a
mD
(66)
4
b
n2
b
n2
a
m2
4
a
m
D
2h
2t
w2h
q
1m
r
1n
)t(mnT2t
2)y,x(mnZh
q
1m
r
1n
)t(mnT)y,x(mnZD
2hD
(67)
2t
w2h
q
1m
r
1n
)t(mnT2t
2)y,x(mnZh
q
1m
r
1n
)t(mnT)y,x(mnZ2h
(68)

14
Multiply each term by )y,x(vuZ .
2t
w2)y,x(vuZh
q
1m
r
1n
)t(mnT2t
2)y,x(mnZ)y,x(vuZh
q
1m
r
1n
)t(mnT)y,x(mnZ)y,x(vuZ2h
(69)
Integrate with respect to surface area.
b
0
a
0dxdy
q
1m
r
1n
)t(mnT)y,x(mnZ)y,x(vuZ2h
b
0
a
0dxdy
q
1m
r
1n
)t(mnT2t
2)y,x(mnZ)y,x(vuZh
b
0
a
0dxdy
q
1m
r
1n
)y,x(vuZ2t
w2h
(70)
15
q
1m
r
1n
b
0
a
0dydx)y,x(mnZ)y,x(vuZ)t(mnT2h
q
1m
r
1n
b
0
a
0dydx)y,x(mnZ)y,x(vuZ)t(mnT
2t
2h
q
1m
r
1n
b
0
a
0)y,x(vuZ
2t
w2h
(71)
The eigenvectors are orthogonal such that
b
0
a
00dydx)y,x(mnZ)y,x(vuZh for u m or v n (72)
b
0
a
01dydx)y,x(mnZ)y,x(vuZh for u = m and v = n (73)

16
q
1m
r
1n
b
0
a
0dydx)y,x(mnZ
2t
w2h
q
1m
r
1n
)t(mnT2t
2q
1m
r
1n
)t(mnT2
(74)
b
0
a
0dydx)y,x(mnZ
2t
w2h)t(mnT2)t(mnT
2t
2 (75)
2td
w2dnm)t(mnT2)t(mnT
2td
2d (76)
Add a damping term.
2td
w2dnm)t(mnT2)t(mnT2
mnmn2)t(mnT2td
2d (77)
)t(nm)t(mn2)t(mn
2mnmn2)t(mn wTTT (78)

17
The following solution is taken from Reference 3. The transfer function is
q
1m
r
1n mnmn2j)22mn(
)y,x(mnZmn),y,x(H (79)
W
),y,x(Z),y,x(H
(80)
The relative displacement is
q
1m
r
1n mnmn2j)22mn(
)y,x(mnZmn),y,x(Z W (81)
q
1m
r
1n mnmn22
mn
mn
2j)(
b
ynsin
a
xmsin
M
2),y,x(Z W (82)
The relative velocity is
q
1m
r
1n mnmn22
mn
mnmn
2j)(
)y,x(Zj),y,x(Z W (83)
q
1m
r
1n mnmn22
mn
mn
2j)(
b
ynsin
a
xmsin
M
2j),y,x(Z W (84)

18
The absolute acceleration is
q
1m
r
1n mnmn22
mn
mnmn2
2j)(
)y,x(Z1),y,x W(U (85)
q
1m
r
1n mnmn22
mn
mn2
2j)(
b
ynsin
a
xmsin
M
21),y,x W(U (86)
The bending moments are
,y,xZ
yxD,y,xM
2
2
2
2
xx (87)
,y,xZ
xyD,y,xM
2
2
2
2
yy (88)
Let z be the distance from the centerline in the vertical axis.
The bending stresses from Reference 4 are
,y,xZ
yx1
zE,y,x
2
2
2
2
2xx
(89)
19
q
1m
r
1n mnmn22
mn
mn2
2
2
2
mn
2xx2j)(
)y,x(Zyx
1
zE,y,x W
(90)
q
1m
r
1n mnmn22
mn
2
2
2
2
mn2
2xx2j)(
b
ynsin
a
xmsin
b
n
a
m
M
2
1
zE,y,x W
(91)
,y,xZ
xy1
zE,y,x
2
2
2
2
2yy
(92)
q
1m
r
1n mnmn22
mn
mn2
2
2
2
mn
2yy2j)(
)y,x(Zxy
1
zE,y,x W
(93)
q
1m
r
1n mnmn22
mn
2
2
2
2
mn2
2yy2j)(
b
ynsin
a
xmsin
a
m
b
n
M
2
1
zE,y,x W
(94)
20
,y,xZ
yx1
zE,y,x
2
xy
(95)
q
1m
r
1n mnmn22
mn
mn
2
mn
xy2j)(
)y,x(Zyx
1
zE,y,x W
(96)
q
1m
r
1n mnmn22
mn
mn2
xy2j)(
b
yncos
a
xmcos
ab
mn
M
2
1
zE,y,x W
(97)
References
1. Dave Steinberg, Vibration Analysis for Electronic Equipment, Wiley-Interscience,
New York, 1988.
2. Arthur W. Leissa, Vibration of Plates, NASA SP-160, National Aeronautics and
Space Administration, Washington D.C., 1969.
3. T. Irvine, Steady-State Vibration Response of a Cantilever Beam Subjected to Base
Excitation Revision A, Vibrationdata, 2009.
4. J.S. Rao, Dynamics of Plates, Narosa, New Delhi, 1999.
21
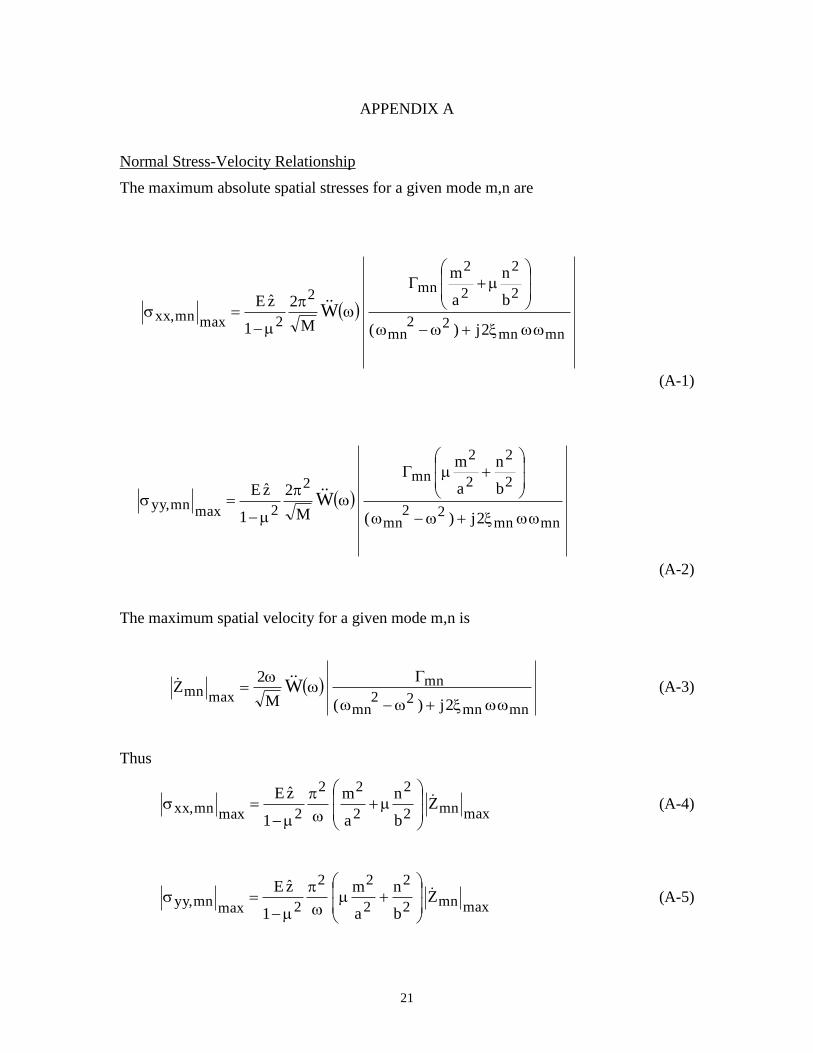
APPENDIX A
Normal Stress-Velocity Relationship
The maximum absolute spatial stresses for a given mode m,n are
mnmn
22mn
2
2
2
2
mn2
2maxmn,xx2j)(
b
n
a
m
M
2
1
zEW
(A-1)
mnmn
22mn
2
2
2
2
mn2
2maxmn,yy2j)(
b
n
a
m
M
2
1
zEW
(A-2)
The maximum spatial velocity for a given mode m,n is
mnmn
22mn
mnmaxmn
2j)(M
2Z W
(A-3)
Thus
maxmn2
2
2
22
2maxmn,xx Zb
n
a
m
1
zE
(A-4)
maxmn2
2
2
22
2maxmn,yy Zb
n
a
m
1
zE
(A-5)

![Parallel-Plate Slot Array Antenna for MicroXSARMission · Rectangular waveguide feeder to each panel [top view] [bottom view] Choke Flange x z y 70 cm 70 cm LHCP port x z y Parallel-Plate](https://img.pdfslide.tips/doc/110x75/5e109940975bb7371154d141/parallel-plate-slot-array-antenna-for-microxsarmission-rectangular-waveguide-feeder.jpg)


![ANEWNAME Mus. I · 2019. 8. 1. · 1935] Figure 1. Figure 2. Figure 3. Figure 4. Figure 5. Notes onMycetophilidte EXPLANATION OF PLATE VI. Clasper of Boletina grcnlandica. Hypopygium](https://img.pdfslide.tips/doc/110x75/60d22adb970249493d1660b6/anewname-mus-i-2019-8-1-1935-figure-1-figure-2-figure-3-figure-4-figure.jpg)