Embed Size (px)
DESCRIPTION
formulario
Citation preview

Tubos de paredes delgadas σ =⋅ + ⋅p r p r
ei i e e ou
erp ⋅
=σ
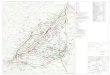
Cargas aplicadas bruscamente
l
h
l
lmax
Δ
Δ o
Massa depeso P
Área A
Espera
(1)
(2)
(3)
σ σ σ σmax = + +⋅ ⋅
⋅0 02
02 E h
l
σ 0 =PA
Δ Δ Δ Δ l l l l hmax = + + ⋅ ⋅0 0
202
Δ = Pl lE A0
⋅⋅
Deslocamentos dos nós de estruturas articuladas planas • Método analítico Δ l u u v vij j i ij j i ij= − ⋅ + − ⋅( ) cos ( ) sinθ θ
• Método de Maxwell-Mohr ii
iP lN Δ⋅=⋅ ∑δ1
Secções heterogéneas
mEE
= 1
2
A m A A2 1 2= ⋅ + I m I I2 1 2= ⋅ +
σ 12
= ⋅ ⋅m MI
y σ 22
= ⋅MI
y
Flexão desviada
x+
+
+
+
y+
e
ne
s
G
α
θ
β
α +
EixoNeutro
Eixo deSolicitação
M
M
Mx+
+y
β = α + θ
Convenção desentidos positivos:
α, β, θ
90º
σ = ⋅ − ⋅MI
yMI
xx
x
y
y
tan tanβ α= ⋅II
x
y
X, Y – eixos principais centrais de inércia

Geometria de massas • Rotação dos eixos
I I I I
I I I I
I I I I
x x y xy
y x y xy
x y x y xy
'
'
' '
cos sin sin( )
sin cos sin( )
sin cos sin cos (cos sin )
= ⋅ + ⋅ − ⋅ ⋅
= ⋅ + ⋅ + ⋅ ⋅
= ⋅ ⋅ − ⋅ ⋅ + ⋅ −
2 2
2 2
2 2
2
2
α α α
α α α
α α α α α α
x
y
α
α
O
'x
'y
• Eixos principais centrais de inércia tan( )22
2
0
0
⋅ = −⋅−
→+
⎡
⎣
⎢⎢⎢
αα
απ
II I
xy
x y
• Momentos principais de inércia I
I II I I
II I
I I I
x yx y xy
x yx y xy
12 2
22 2
212
4
212
4
=+
+ ⋅ − + ⋅
=+
− ⋅ − + ⋅
( )
( )
Características geométricas de algumas secções correntes
Secção h
b
G x
h
b
Gx
y
2R
dxGGR
D
xG
d _____ _____ 0 4244. ⋅ R _____
Ix b h⋅ 3
12 b h⋅ 3
36 0 1098 4. ⋅ R π ⋅ D4
64
Ixy _____ −⋅b h2 2
72 _____ _____
Parábolas de grau n do tipo: y k xn= ⋅
Ω1 1=
⋅+
fnl
Ω2 1=
+⋅ ⋅
nn
f l
dn1 2
=+l
( )
d nn2
12 2
=+
⋅ +⋅ l
G1
G2
d d
f
l
2 1
12 Deformações em flexão
• Método da integração da elástica IE
My⋅
−=''
• Método da unidade fictícia de carga dxIEMM
P ∫ ⋅⋅
=⋅δ1
• Método das áreas momentos ABAB Ω−= ϕϕ byy ABAAB ⋅Ω−⋅+= ϕl
• Método da viga conjugada IE
Mp⋅
=∗ ∗= My ∗= Vϕ

Corte
τmedy x
x
V SI b
=⋅
⋅
rV S
Iy x
x
=⋅
τ τ
τ= − ⋅
⋅∫∫
001
eds
dse
Torção (Ver tabelas 1 e 2)
τ =⋅T r
I p τmax =
TWt
θϕ
= =⋅l
TG Jt
Jt - Inércia de torção Wt - Módulo de torção G Jt⋅ - Rigidez à torção Tabela 1
Secção Jt Wt Secção Jt Wt
D
R
I p
π ⋅ R4
2
π ⋅ D4
32
π ⋅ R3
2
π ⋅ D3
16 a
a a
380
4⋅a
a3
20
Dd
e
I p
( )π ⋅ −D d4 4
32
( )π ⋅ −⋅
D dD
4 4
16
R R
R4
3 38.
R4
2 87.
a
a
a4
7 114.
a3
4 804.
A 0
R
R4
114.
0
h
b h b>
h b⋅ 3
β
(ver tabela 2)
h b⋅ 2
α
(ver tabela 2)
L
e = c o n s t a n t e
L e⋅ 3
3
L e⋅ 2
3
h
b h b>>
h b⋅ 3
3
( )β = 3
h b⋅ 2
3
( )α = 3
L
L
L
e
1
e2e4
e3
2
3L4
1
13
3⋅ ⋅∑ L ei i
Je
t
max
a
b
a
b
π ⋅ ⋅+
a ba b
3 3
2 2
π ⋅ ⋅a b2
2
e
sd
4 2⋅
∫Ωdse
2 ⋅ ⋅Ω emin
Tabela 2 (n=h/b)
n 1,00 1,10 1,20 1,25 1,30 1,40 1,50 1,60 1,70 1,80 2,00 2,25 2,50 3,00 4,00 5,00 6,00 8,00 10,00 20,00 ∝
α 4,804 4,67 4,57 4,52 4,48 4,40 4,33 4,27 4,21 4,16 4,07 3,97 3,88 3,74 3,55 3,43 3,35 3,26 3,20 3,10 3,00
β 7,114 6,49 6,02 5,82 5,65 5,35 5,11 4,91 4,74 4,60 4,37 4,16 4,01 3,80 3,56 3,43 3,35 3,26 3,20 3,10 3,00

Flexão composta
σ = − ⋅ + ⋅NA
MI
xMI
yy
y
x
x i
IAxx= i
IAy
y=
xi
xy∗ =
− 2
0 y
iy
x∗ =− 2
0 x
MN
y0 =
− y
MN
x0 =
Instabilidade elástica
P NEI
cr Ee
= =π2
2l σ
ϕSdSdN
A=
⋅
σϕSd
Sd x Sd xmax
x
Sd
Ex
y Sd ymax
y
Sd
Ey
NA
c M
kIv
NN
c M
Iv
NN
=⋅
+⋅
⋅⎛⎝⎜
⎞⎠⎟ ⋅ −
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
+⋅
⎛⎝⎜
⎞⎠⎟ ⋅ −
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
, ,
. .
1
18
1
18
σSdSd Sd x
x
Sd y
y
NA
MIv
MIv
= +⎛⎝⎜
⎞⎠⎟
+⎛⎝⎜
⎞⎠⎟
, ,
Nós móveis... …………………………….…. ………………... ….. c = 085.
=yx cc /
Sem cargas transversais…..
………………... ….. c
MM
MM
= ⋅ +⎛⎝⎜
⎞⎠⎟ + ⋅0 3 1 0 42
2
12
2
1. .
Nós fixos Articulada …….. c = 100. Com cargas transversais Encastrada ... ….. c = 085. Comprimentos de encurvadura
l
l le = l le = ⋅2 l le = ll
e =2
l le = ⋅0 7.
Estruturas trianguladas planas: l e " = ⋅0 8. l l e
⊥ = l ' Valores do coeficiente de encurvadura, ϕ
Tipo de aço Coeficiente de esbelteza, λ Coeficiente de encurvadura, ϕ
λ ≤ 20 ϕ = 1
Fe 360 20 < λ ≤ 105 ϕ = 1,1328 - 0.00664 λ
λ > 105 ϕ =4802 / λ2
λ ≤ 20 ϕ = 1
Fe 430 20 < λ ≤ 96 ϕ = 1,1460 - 0.00730 λ
λ > 96 ϕ =4103 / λ2
λ ≤ 20 ϕ = 1
Fe 510 20 < λ ≤ 85 ϕ = 1,1723 - 0.00862 λ
λ > 85 ϕ =3179 / λ2