Embed Size (px)
Citation preview

47/56
6.6 3次元音場生成用振動制御の実証【東京理科大学】 (2)Rob共通基盤開発PJ事後評価
事業原簿 iii-71-74
パネル4枚の音場測定結果(4焦点)
構築した128chパネルスピーカアレイ
・部屋大の音場の3次元制御・空間中の所望の位置でのみ局所的に音を聞かせることが可能・音を聞かせる位置は3次元的に制御可・同時に複数箇所で異なる内容を聞かせることが可能(超音波利用の狭指向性スピーカでは不可能)
パネル4枚で構成した512chスピーカアレイ
(高さの異なる4箇所で局所的に音が聞こえている)
48/56
6.6 3次元音場生成用振動制御の実証【東京理科大学】 (3)Rob共通基盤開発PJ事後評価
事業原簿 iii-71-74
2台の運動制御モジュールによる同期例(500Hz)
一目盛4μs.「時計合わせ」直後で,ずれが1μs以下に収まっていることが見て取れる.
2台の運動制御モジュールによる同期例(4KHz)
一目盛4μs.ずれが蓄積しているものの1μs程度である例.125μs周期の等周期実行により4KHzの波形出力が実現できている.
2台の運動制御モジュールによる同期例
複数台運動制御モジュール同士の同期した等周期動作
同期ずれの例(500Hz)
それぞれのDAコンバータ出力信号を観測したもの.500Hz矩形波を出力する等周期時間タスクが両モジュールで稼働しており,両者の同期が取れた状態.
一目盛4μs.「時計合わせ」後1000ミリ秒後,ずれが10μs程度まで蓄積した例.

49/56
6.6 3次元音場生成用振動制御の実証【東京理科大学】 (4)Rob共通基盤開発PJ事後評価
事業原簿 iii-71-74
・運動制御モジュールで,サンプリング周期数十~百マイクロ秒台の等周期動作をソフトウェア的に実現できること
・複数台の運動制御モジュール同士が同期して等周期動作を実現できること
・運動制御モジュール間の同期精度は1マイクロ秒台で実現できること
・結果として半径30cmの領域で周囲との音圧差6dB以上の音場が得られること
・同時に2カ所以上の箇所で異なる内容の音を聞かせられること
実証目標
結果
・125マイクロ秒周期の等周期動作を安定して実現できた (目標達成度 △~○)
・複数台の運動制御モジュール同士が同期して等周期動作実現 (◎)(他に例を見ない)
・運動制御モジュール間の同期精度は1マイクロ秒以下を実現 (◎) (他に例を見ない)
・結果として半径30cmの領域で周囲との音圧差約6dBの音場が得られた (○)( 〃 )
・同時に4箇所で異なる内容の音を聞かせることに成功 (◎) (他に例を見ない)
類似の製品は存在せず、世界的にも例が無い。
DASH-4の並列同
期運転により大規模メカを分散制御する可能性が拓かれた。
備考
50/56
7.1 目標の達成度(基本計画)
6種類のロボットで実証
シリアルポート、AD×4、USB、IEEE1394を装備
90×55㎜=49.5平方センチ、41グラム
実証ロボットで安定動作
制御部は、3-5W、発熱は、無風で周囲温度+27度、送風で+7度
Linux-2.6を改造したART-Linux-2.6が動作
EtherRTおよびCAN
電流制御ループは0.1ms周期、速度、角度制御は、1モジュール8軸まで1ms周期
モータの電流、速度、角度指令RTCのほか、車輪、脚、マニピュレータ制御RTC.各々は状態出力可能
1セットでDCまたはACモータを2軸、拡張可能
達成状況
○
○
○
○
○
○
○
○
○
○
50平方センチ以下、150グラム以下小型軽量
強電系と共存して安定動作耐ノイズ性
制御部が15W以下、モータ近傍で安定動作低消費電力
耐熱性
加速度、ジャイロ、力覚、レーザレーダ等を接続可能
付加機能
5種類以上のロボットに適用ロボット実証
汎用OSが動作する可用性
複数の実時間通信インタフェイス通信
1ms以下の周期処理実時間制御
RTコンポーネントとして動作し、制御情報と状
態量を出力可能
RTコンポーネ
ント
一軸以上のアクチュエータを制御モータ制御
目標研究項目
事業原簿 iii-75
Rob共通基盤開発PJ事後評価
51/56
Rob共通基盤開発PJ事後評価
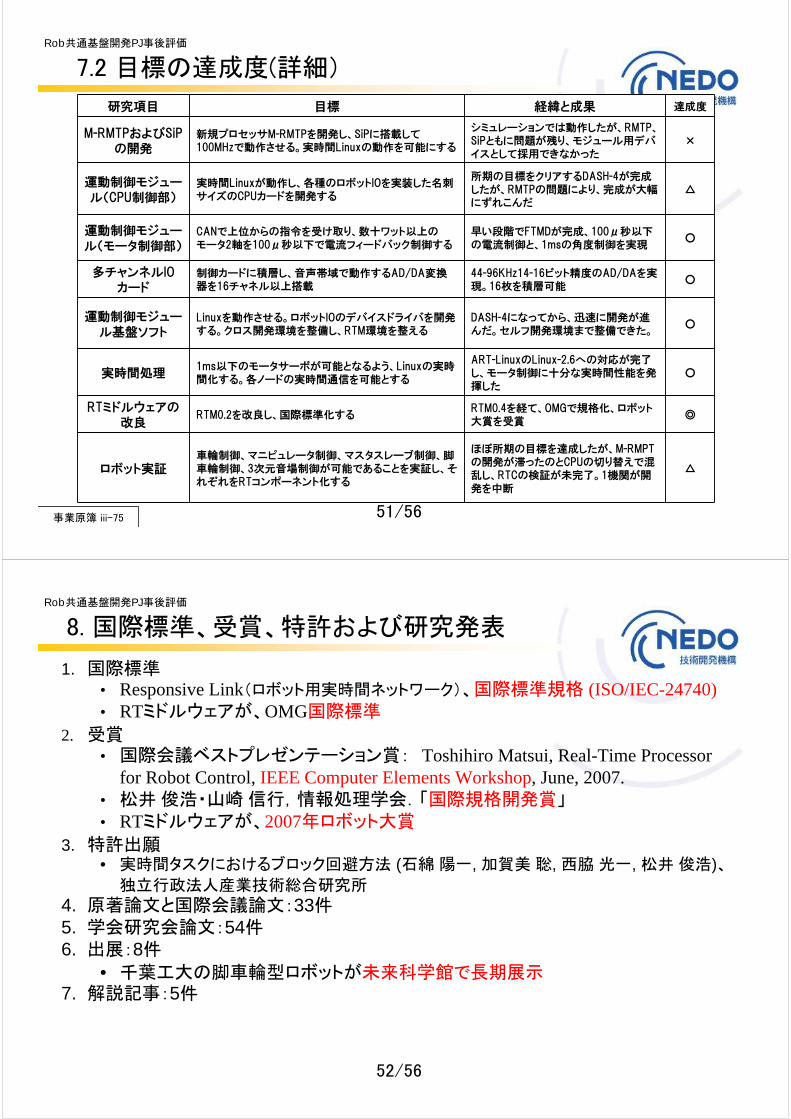
7.2 目標の達成度(詳細)
事業原簿 iii-75
研究項目 目標 経緯と成果 達成度
M-RMTPおよびSiPの開発
新規プロセッサM-RMTPを開発し、SiPに搭載して100MHzで動作させる。実時間Linuxの動作を可能にする
シミュレーションでは動作したが、RMTP、SiPともに問題が残り、モジュール用デバイスとして採用できなかった
×
運動制御モジュール(CPU制御部)
実時間Linuxが動作し、各種のロボットIOを実装した名刺サイズのCPUカードを開発する
所期の目標をクリアするDASH-4が完成したが、RMTPの問題により、完成が大幅にずれこんだ
△
運動制御モジュール(モータ制御部)
CANで上位からの指令を受け取り、数十ワット以上のモータ2軸を100μ秒以下で電流フィードバック制御する
早い段階でFTMDが完成、100μ秒以下の電流制御と、1msの角度制御を実現
○
多チャンネルIOカード
制御カードに積層し、音声帯域で動作するAD/DA変換器を16チャネル以上搭載
44-96KHz14-16ビット精度のAD/DAを実現。16枚を積層可能
○
運動制御モジュール基盤ソフト
Linuxを動作させる。ロボットIOのデバイスドライバを開発する。クロス開発環境を整備し、RTM環境を整える
DASH-4になってから、迅速に開発が進んだ。セルフ開発環境まで整備できた。
○
実時間処理1ms以下のモータサーボが可能となるよう、Linuxの実時間化する。各ノードの実時間通信を可能とする
ART-LinuxのLinux-2.6への対応が完了し、モータ制御に十分な実時間性能を発揮した
○
RTミドルウェアの改良
RTM0.2を改良し、国際標準化するRTM0.4を経て、OMGで規格化、ロボット大賞を受賞
◎
ロボット実証車輪制御、マニピュレータ制御、マスタスレーブ制御、脚車輪制御、3次元音場制御が可能であることを実証し、それぞれをRTコンポーネント化する
ほぼ所期の目標を達成したが、M-RMPTの開発が滞ったのとCPUの切り替えで混乱し、RTCの検証が未完了。1機関が開発を中断
△
52/56
8. 国際標準、受賞、特許および研究発表Rob共通基盤開発PJ事後評価
1. 国際標準• Responsive Link(ロボット用実時間ネットワーク)、国際標準規格 (ISO/IEC-24740)• RTミドルウェアが、OMG国際標準
2. 受賞• 国際会議ベストプレゼンテーション賞: Toshihiro Matsui, Real-Time Processor
for Robot Control, IEEE Computer Elements Workshop, June, 2007.• 松井 俊浩・山崎 信行,情報処理学会.「国際規格開発賞」• RTミドルウェアが、2007年ロボット大賞
3. 特許出願• 実時間タスクにおけるブロック回避方法 (石綿 陽一, 加賀美 聡, 西脇 光一, 松井 俊浩)、
独立行政法人産業技術総合研究所
4. 原著論文と国際会議論文:33件5. 学会研究会論文:54件6. 出展:8件
• 千葉工大の脚車輪型ロボットが未来科学館で長期展示7. 解説記事:5件

53/56
Rob共通基盤開発PJ事後評価
9. 活用の可能性
研究項目 意義
M-RMTPおよびSiPの開発ロボットの実時間制御を分散して行える、新規プロセッサM-RMTPを提案した。RMTPに関する研究発表(招待講演)は、学会でベストプレゼンテーション賞を獲得しており、また、レスポンシブリンクはISO/IEC国際標準化に成功している。実装では失敗したが、アイデアは秀逸。
運動制御モジュール(CPU部)類似の製品に対して、小型(単一ボード)、単一電源、Gbitネットワークを備えるなどの特徴があり、高性能の 新の実時間Linuxが動作する点でも意義がある
運動制御モジュール(モータ制御部)
DCだけでなく大出力のACモータの制御ができる点、全ディジタルで耐ノイズ性、耐久力が強い点、DSPのユーザープログラミングが可能な点などが優位性
多チャンネルIOカード小型のボードで、16*AD+16*DAを実現。アナログ値を高精度で扱う応用にとっては唯一のソリューションとなりうる
運動制御モジュール基盤ソフト小型の組み込み用のCPUボード上で、ネットワークや外部記憶を備えた完全なLinuxが動作し、RTCのセルフ開発までが行える点、RTM環境まで整っている点
実時間処理実時間OSは、高価であったり開発が中断しているケースも多い中で、日本製のプロセッサの上で高度な実時間性能を発揮できるLinuxが開発できた意義は大きい。また、EtherRTもユニークで、十分な性能が期待できる
RTミドルウェアの改良OMG国際標準化を達成し、ロボットのモジュラー開発を進める重要なプラットフォームとなることが期待できる
ロボット実証車輪制御、マニピュレータ制御、マスタスレーブ制御、脚車輪制御、3次元音場制御が可能であることを実証できた。各機能をRTコンポーネントとして提供できる可能性がある
事業原簿 iii-75
54/56
Rob共通基盤開発PJ事後評価
10.実用化の見通し
コスト
高性能を高密度で実装するため、コストダウンが困難
⇒ ローコストデバイスへの変更、もっと大きな基板への変更
⇒ DSPなしで、DASH-4が直接にモータアンプを駆動するアーキテクチャへの変更
安全性、安定性耐熱性、耐ノイズ性、PSE⇒ 安全基準の獲得
実時間OSの安定性
⇒ 負荷試験の拡大
今後の計画
現有のモジュールを研究・評価目的で貸与
知能化プロジェクト実施機関に供給(30台程度)
モータアンプの新シリーズへの展開
M-RMTPの開発継続(CRESTでの発展的継続)
事業化DASH-4をデジタルヒューマンテクノロジ(有)から、FTMD-1をピューズから販売する
ことを計画中
貸与機関による評価、WEBでの反応を見て、事業化を決定する
事業原簿 iii-76
産総研 千葉工大アックス
DASH-4 FTMD-1Linux等
デジタルヒューマンテクノロジ(有)
ピューズ(株)

55/56
Rob共通基盤開発PJ事後評価
11.まとめ
M-RMTPからSH-4への計画変更
RMTPの機能が、ロボットにとって画期的に重要であることは、数々の論文、招待講演や受賞が示している
一回目のM-RMTP試作でプロセッサの問題が明らかになり、2回目の試作ではその改修を行う予定であったが、非常な高密度実装のため、SiPの設計が難航し、問題点を取り除くことができなかった
デバイス試作の失敗のため、ロボット実証に費やせる期間が半年になってしまった
DASH-4による運動制御モジュール
数ヶ月の開発期間で、DASH-4による運動モジュール開発に成功したのは、奇跡的とも言える。M-RMTPの機能を
完全に置き換えることはできないが、既存のプロセッサを用いて、より現実的な解が得られた
しかし、小型高密度実装は、コストアップ要因となった
ソフトウェアとRTコンポーネント
DASH-4上で動作する実時間Linuxを開発
各種デバイスドライバ、通信プロトコル
100マイクロ秒の電流サーボと1msの速度、角度サーボを実現
RTコンポーネントとして、モータ制御基本モジュールの他、車輪制御、6軸マニピュレータ制御などを開発
ロボット実証1機関が開発を断念せざるを得なかったが、5つの機関が6種類のロボットに運動制御モジュールを組み込み、そ
の有効性を実証することができた。
後継のロボット知能化プロジェクトでの活用が予定されている
反響を見て事業化
事業原簿 iii-76-77
56/56
Rob共通基盤開発PJ事後評価
以 上
謝辞3年間にわたり、プロジェクト進行をマネージしてくださり、特に3年目の初めの代替プロセッサ選定時には、多大なアドバイスを下さったPLおよびNEDO機械システム部の皆様に感謝申し上げます。
モジュール開発が滞った後に、きわめて短期間でロボット実証にこぎつけてくださった、実証機関の各研究者に感謝申し上げます。

参考資料1 評価の実施方法

参考資料 1-1
本評価は、「技術評価実施規程」(平成 15 年 10 月制定)に基づいて研究評価
を実施する。
独立行政法人新エネルギー・産業技術総合開発機構(NEDO)における研究
評価の手順は、以下のように被評価プロジェクト毎に分科会を設置し、同分科
会にて研究評価を行い、評価報告書(案)を策定の上、研究評価委員会において確
定している。 「NEDO 技術委員・技術委員会等規程」に基づき研究評価委員会を設置 研究評価委員会はその下に分科会を設置
NEDO
評価報告書(案)審議・確定
理事長
評価書報告
評価報告書(案)作成
実施者プロジェクトの説明
国 民
評価結果公開
推進部署
分科会B 分科会D
分科会A 分科会C
事務局
研究評価部
研究評価委員会
推進部署評価結果の事業等への反映
NEDO
評価報告書(案)審議・確定
理事長
評価書報告
評価報告書(案)作成
実施者プロジェクトの説明
国 民
評価結果公開
推進部署
分科会B 分科会D
分科会A 分科会C
事務局
研究評価部
研究評価委員会
推進部署評価結果の事業等への反映

参考資料 1-2
1.評価の目的 評価の目的は「技術評価実施規程」において、
業務の高度化等の自己改革を促進する。 社会に対する説明責任を履行するとともに、経済・社会ニーズを取
り込む。 評価結果を資源配分に反映させ、資源の重点化及び業務の効率化を
促進する。 としている。 本評価においては、この趣旨を踏まえ、本事業の意義、研究開発目標・計画
の妥当性、計画と比較した達成度、成果の意義、成果の実用化の可能性等につ
いて検討・評価した。 2.評価者 技術評価実施規程に基づき、事業の目的や態様に即した外部の専門家、有識
者からなる委員会方式により評価を行う。分科会委員選定に当たっては以下の
事項に配慮して行う。 科学技術全般に知見のある専門家、有識者 当該研究開発の分野の知見を有する専門家 研究開発マネジメントの専門家、経済学、環境問題その他社会的ニ
ーズ関連の専門家、有識者 産業界の専門家、有識者
また、評価に対する中立性確保の観点から事業の推進側関係者を選任対象か
ら除外し、また、事前評価の妥当性を判断するとの側面にかんがみ、事前評価
に関与していない者を主体とする。 これらに基づき、分科会委員名簿にある7名を選任した。 なお、本分科会の事務局については、独立行政法人新エネルギー・産業技術
総合開発機構研究評価部が担当した。 3.評価対象 平成17年度に開始された「次世代ロボット共通基盤開発」プロジェクトを
評価対象とした。 なお、分科会においては、当該事業の推進部署から提出された事業原簿、プ
ロジェクトの内容、成果に関する資料をもって評価した。

参考資料 1-3
4.評価方法 分科会においては、当該事業の推進部室及び研究実施者からのヒアリングと、
それを踏まえた分科会委員による評価コメント作成、評点法による評価及び実
施者側等との議論等により評価作業を進めた。 なお、評価の透明性確保の観点から、知的財産保護の上で支障が生じると認
められる場合等を除き、原則として分科会は公開とし、研究実施者と意見を交
換する形で審議を行うこととした。 5.評価項目・評価基準 分科会においては、次に掲げる「評価項目・評価基準」で評価を行った。こ
れは、研究評価委員会による『各分科会における評価項目・評価基準は、被評
価プロジェクトの性格、中間・事後評価の別等に応じて、各分科会において判
断すべきものである。』との考え方に従い、第1回分科会において、事務局が、
研究評価委員会により示された「標準的評価項目・評価基準」(参考資料1-7
頁参照)をもとに改訂案を提示し、承認されたものである。 プロジェクト全体に係わる評価においては、主に事業の目的、計画、運営、
達成度、成果の意義や実用化への見通し等について評価した。各個別テーマに
係る評価については、主にその目標に対する達成度等について評価した。

参考資料 1-4
評価項目・評価基準
1.事業の位置付け・必要性について
(1)NEDOの事業としての妥当性
・ 21世紀ロボットチャレンジプログラムの下で、当該施策・制度の目標達
成のために寄与しているか。
・ 民間活動のみでは改善できないものであること、又は公共性が高いことに
より、NEDOの関与が必要とされる事業か。
・ 当該事業を実施することによりもたらされる効果が、投じた予算との比較
において十分であるか。
(2)事業目的の妥当性
・ 内外の技術開発動向、国際競争力の状況、市場動向、政策動向等から見て、
事業の目的は妥当か。
2.研究開発マネジメントについて
(1)研究開発目標の妥当性
・ 内外の技術動向、市場動向等を踏まえて、戦略的な目標が設定されている
か。
・ 具体的かつ明確な開発目標を可能な限り定量的に設定しているか。
・ 目標達成度を測定・判断するための適切な指標が設定されているか。
(2)研究開発計画の妥当性
・ 目標達成のために妥当なスケジュール、予算(各個別研究テーマ毎の配分
を含む)となっているか。
・ 目標達成に必要な要素技術を取り上げているか。
・ 研究開発フローにおける要素技術間の関係、順序は適切か。
(3)研究開発実施の事業体制の妥当性
・ 適切な研究開発チーム構成での実施体制になっているか。
・ 真に技術力と事業化能力を有する企業を実施者として選定しているか。
・ 全体を統括するプロジェクトリーダー等が選任され、十分に活躍できる環
境が整備されているか。
・ 目標達成及び効率的実施のために必要な実施者間の連携が十分に行われ

参考資料 1-5
る体制となっているか。
・ 実用化シナリオに基づき、成果の受け取り手(ユーザー、活用・実用化の
想定者等)に対して、関与を求める体制を整えているか。
(4)情勢変化への対応等
・ 進捗状況を常に把握し、社会・経済の情勢の変化及び政策・技術動向に機
敏かつ適切に対応しているか。
・ 計画見直しの方針は一貫しているか(中途半端な計画見直しが研究方針の
揺らぎとなっていないか)。計画見直しを適切に実施しているか。
3.研究開発成果について
(1)目標の達成度
・ 成果は目標値をクリアしているか。
・ 全体としての目標達成はどの程度か。
・ 目標未達成の場合、目標達成までの課題を把握し、課題解決の方針が明確
になっているか。
(2)成果の意義
・ 成果は市場の拡大或いは市場の創造につながることが期待できるか。
・ 成果は、世界初あるいは世界 高水準か。
・ 成果は、新たな技術領域を開拓することが期待できるか。
・ 成果は汎用性があるか。
・ 投入された予算に見合った成果が得られているか。
・ 成果は、他の競合技術と比較して優位性があるか。
(3)知的財産権等の取得及び標準化の取組
・ 知的財産権等の取扱(特許や意匠登録出願、著作権や回路配置利用権の登
録、品種登録出願、営業機密の管理等)は事業戦略、または実用化計画に
沿って国内外に適切に行われているか。
・ 国際標準化に関する事項が計画されている場合、得られた研究開発の成果
に基づく国際標準化に向けた提案等の取組が適切に行われているか。
(4)成果の普及
・ 論文の発表は、研究内容を踏まえ適切に行われているか。
・ 成果の受取手(ユーザー、活用・実用化の想定者等)に対して、適切に成

参考資料 1-6
果を普及しているか。また、普及の見通しは立っているか。
・ 一般に向けて広く情報発信をしているか。
4.実用化の見通しについて
(1)成果の実用化可能性
・ 実用化イメージ・出口イメージが明確になっているか。
・ 実用化イメージ・出口イメージに基づき、開発の各段階でマイルストーン
を明確にしているか。それを踏まえ、引き続き研究開発が行われる見通し
は立っているか。
・ 国際標準化に関する事項が計画されている場合、国際規格化等、標準整備
に向けた見通しが得られているか。
(2)波及効果
・ 成果は関連分野への波及効果(技術的・経済的・社会的)を期待できるも
のか。
・ プロジェクトの実施自体が当該分野の研究開発や人材育成等を促進する
などの波及効果を生じているか。

参考資料 1-7
標準的評価項目・評価基準(事後評価)
2008.3.27
【事後評価 標準的評価項目・評価基準の位置付け(基本的考え方)】
標準的評価項目・評価基準は、第17回研究評価委員会(平成20年3月2
7日付)において以下のとおり定められている。(本文中の記載例による1・・・、
2・・・、3・・・、4・・・が標準的評価項目、それぞれの項目中の(1)・・・、(2)・・・
が標準的評価基準、それぞれの基準中の・ ・・・が視点)
ただし、これらの標準的評価項目・評価基準は、研究開発プロジェクトの事
後評価における標準的な評価の視点であり、各分科会における評価項目・評価
基準は、被評価プロジェクトの性格等に応じて、各分科会において判断すべき
ものである。
1.事業の位置付け・必要性について
(1)NEDOの事業としての妥当性
・ 特定の施策(プログラム)、制度の下で実施する事業の場合、当該施策・
制度の目標達成のために寄与しているか。
・ 民間活動のみでは改善できないものであること、又は公共性が高いことに
より、NEDOの関与が必要とされる事業か。
・ 当該事業を実施することによりもたらされる効果が、投じた予算との比較
において十分であるか。
(2)事業目的の妥当性
・ 内外の技術開発動向、国際競争力の状況、エネルギー需給動向、市場動向、
政策動向、国際貢献の可能性等から見て、事業の目的は妥当か。
2.研究開発マネジメントについて
(1)研究開発目標の妥当性
・ 内外の技術動向、市場動向等を踏まえて、戦略的な目標が設定されている
か。
・ 具体的かつ明確な開発目標を可能な限り定量的に設定しているか。
・ 目標達成度を測定・判断するための適切な指標が設定されているか。
参考資料 1-8
(2)研究開発計画の妥当性
・ 目標達成のために妥当なスケジュール、予算(各個別研究テーマ毎の配分
を含む)となっているか。
・ 目標達成に必要な要素技術を取り上げているか。
・ 研究開発フローにおける要素技術間の関係、順序は適切か。
・ 継続プロジェクトや長期プロジェクトの場合、技術蓄積を、実用化の観点
から絞り込んだうえで活用が図られているか。
(3)研究開発実施の事業体制の妥当性
・ 適切な研究開発チーム構成での実施体制になっているか。
・ 真に技術力と事業化能力を有する企業を実施者として選定しているか。
・ 研究管理法人を経由する場合、研究管理法人が真に必要な役割を担ってい
るか。
・ 全体を統括するプロジェクトリーダー等が選任され、十分に活躍できる環
境が整備されているか。
・ 目標達成及び効率的実施のために必要な実施者間の連携 and/or 競争が
十分に行われる体制となっているか。
・ 実用化シナリオに基づき、成果の受け取り手(ユーザー、活用・実用化の
想定者等)に対して、関与を求める体制を整えているか。
(4)情勢変化への対応等
・ 進捗状況を常に把握し、社会・経済の情勢の変化及び政策・技術動向に機
敏かつ適切に対応しているか。
・ 計画見直しの方針は一貫しているか(中途半端な計画見直しが研究方針の
揺らぎとなっていないか)。計画見直しを適切に実施しているか。
3.研究開発成果について
(1)目標の達成度
・ 成果は目標値をクリアしているか。
・ 全体としての目標達成はどの程度か。
・ 目標未達成の場合、目標達成までの課題を把握し、課題解決の方針が明確
になっているか。
(2)成果の意義

参考資料 1-9
・ 成果は市場の拡大或いは市場の創造につながることが期待できるか。
・ 成果は、世界初あるいは世界 高水準か。
・ 成果は、新たな技術領域を開拓することが期待できるか。
・ 成果は汎用性があるか。
・ 投入された予算に見合った成果が得られているか。
・ 成果は、他の競合技術と比較して優位性があるか。
(3)知的財産権等の取得及び標準化の取組
・ 知的財産権等の取扱(特許や意匠登録出願、著作権や回路配置利用権の登
録、品種登録出願、営業機密の管理等)は事業戦略、または実用化計画に
沿って国内外に適切に行われているか。
・ 国際標準化に関する事項が計画されている場合、得られた研究開発の成果
に基づく国際標準化に向けた提案等の取組が適切に行われているか。
(4)成果の普及
・ 論文の発表は、研究内容を踏まえ適切に行われているか。
・ 成果の受取手(ユーザー、活用・実用化の想定者等)に対して、適切に成
果を普及しているか。また、普及の見通しは立っているか。
・ 一般に向けて広く情報発信をしているか。
4.実用化、事業化の見通しについて
(1)成果の実用化可能性
・ 産業技術としての見極め(適用可能性の明確化)ができているか。
・ 実用化に向けて課題が明確になっているか。課題解決の方針が明確になっ
ているか。
・ 国際標準化に関する事項が計画されている場合、国際規格化等、標準整備
に向けた見通しが得られているか。
(2)事業化までのシナリオ
・ NEDO後継プロジェクト、NEDO実用化助成、企業内研究等、プロ
ジェクト終了後の事業化までの道筋は明確か。
・ コストダウン、競合技術との比較、導入普及、事業化までの期間、事業
化とそれに伴う経済効果等の見通しは立っているか。
(3)波及効果

参考資料 1-10
・ 成果は関連分野への波及効果(技術的・経済的・社会的)を期待できるも
のか。
・ プロジェクトの実施自体が当該分野の研究開発や人材育成等を促進する
などの波及効果を生じているか。

参考資料 1-11
※ 基礎的・基盤的研究及び知的基盤・標準整備等の研究開発の場合は、以
下の項目・基準による。
*基礎的・基盤的研究開発の場合
3.研究開発成果について
(1)目標の達成度
・ 成果は目標値をクリアしているか。
・ 全体としての目標達成はどの程度か。
・ 目標未達成の場合、目標達成までの課題を把握し、課題解決の方針が明確
になっているか。
(2)成果の意義
・ 成果は市場の拡大或いは市場の創造につながることが期待できるか。
・ 成果は、世界初あるいは世界 高水準か。
・ 成果は、新たな技術領域を開拓することが期待できるか。
・ 成果は汎用性があるか。
・ 投入された予算に見合った成果が得られているか。
・ 成果は、他の競合技術と比較して優位性があるか。
(3)知的財産権等の取得及び標準化の取組
・ 知的財産権等の取扱(特許や意匠登録出願、著作権や回路配置利用権の登
録、品種登録出願、営業機密の管理等)は事業戦略、または実用化計画に
沿って国内外に適切に行われているか。
・ 国際標準化に関する事項が計画されている場合、得られた研究開発の成果
に基づく国際標準化に向けた提案等の取組が適切に行われているか。
(4)成果の普及
・ 論文の発表は、研究内容を踏まえ適切に行われているか。
・ 成果の受取手(ユーザー、活用・実用化の想定者等)に対して、適切に成
果を普及しているか。また、普及の見通しは立っているか。
・ 一般に向けて広く情報発信をしているか。
4.実用化の見通しについて
(1)成果の実用化可能性
・ 実用化イメージ・出口イメージが明確になっているか。

参考資料 1-12
・ 実用化イメージ・出口イメージに基づき、開発の各段階でマイルストーン
を明確にしているか。それを踏まえ、引き続き研究開発が行われる見通し
は立っているか。
・ 国際標準化に関する事項が計画されている場合、国際規格化等、標準整備
に向けた見通しが得られているか。
(2)波及効果
・ 成果は関連分野への波及効果(技術的・経済的・社会的)を期待できるも
のか。
・ プロジェクトの実施自体が当該分野の研究開発や人材育成等を促進する
などの波及効果を生じているか。
*知的基盤・標準整備等の研究開発の場合
3.研究開発成果について
(1)目標の達成度
・ 成果は目標値をクリアしているか。
・ 全体としての目標達成はどの程度か。
・ 目標未達成の場合、目標達成までの課題を把握し、課題解決の方針が明確
になっているか。
(2)成果の意義
・ 成果は市場の拡大或いは市場の創造につながることが期待できるか。
・ 成果は、世界初あるいは世界 高水準か。
・ 成果は、新たな技術領域を開拓することが期待できるか。
・ 成果は汎用性があるか。
・ 投入された予算に見合った成果が得られているか。
・ 成果は公開性が確保されているか。
(3)知的財産権等の取得及び標準化の取組
・ 研究内容に新規性がある場合、知的財産権等の取扱(特許や意匠登録出願、
著作権や回路配置利用権の登録、品種登録出願、営業機密の管理等)は事
業戦略、または実用化計画に沿って国内外に適切に行われているか。
・ 国際標準化に関する事項が計画されている場合、得られた研究開発の成果
に基づく国際標準化に向けた提案等の取組が適切に行われているか。

参考資料 1-13
(4)成果の普及
・ 論文の発表は、研究内容を踏まえ適切に行われているか。
・ 成果の受取手(ユーザー、活用・実用化の想定者等)に対して、適切に成
果を普及しているか。また、普及の見通しは立っているか。
・ 一般に向けて広く情報発信をしているか。
4.実用化の見通しについて
(1)成果の実用化可能性
・ 整備した知的基盤についての利用は実際にあるか、その見通しが得られて
いるか。
・ 公共財として知的基盤を供給、維持するための体制は整備されているか、
その見込みはあるか。
・ 国際標準化に関する事項が計画されている場合、国際規格化等、標準整備
に向けた見通しが得られているか。
・ JIS化、標準整備に向けた見通しが得られているか。注)国内標準に限る
・ 一般向け広報は積極的になされているか。
(2)波及効果
・ 成果は関連分野への波及効果(技術的・経済的・社会的)を期待できるも
のか。
・ プロジェクトの実施自体が当該分野の研究開発や人材育成等を促進する
などの波及効果を生じているか。
参考資料2 評価に係る被評価者意見

参考資料 2-1
研究評価委員会(分科会)は、評価結果を確定するに当たり、あらかじめ当
該実施者に対して評価結果を示し、その内容が、事実関係から正確性を欠くな
どの意見がある場合に、補足説明、反論などの意見を求めた。研究評価委員会
(分科会)では、意見があったものに対し、必要に応じて評価結果を修正の上、
終的な評価結果を確定した。 評価結果に対する被評価者意見は全て反映された。

本研究評価委員会報告は、独立行政法人新エネルギー・産業技術
総合開発機構(NEDO技術開発機構)研究評価広報部が委員会
の事務局として編集しています。
平成20年10月 NEDO技術開発機構 研究評価広報部 統括主幹 竹下 満 主幹 寺門 守
担当 山田 武俊
*研究評価委員会に関する情報はNEDO技術開発機構のホームページ
に掲載しています。
(http://www.nedo.go.jp/iinkai/kenkyuu/index.html)
〒212-8554 神奈川県川崎市幸区大宮町1310番地
ミューザ川崎セントラルタワー16F
TEL 044-520-5161 FAX 044-520-5162




![Краткое623/ PJ-662/PJ-663 PJ-622/PJ- принтерdownload.brother.com/welcome/docp100003/cv_pj600_rus_qrg_lbd103001.pdfпункты [Пуск], [Панель управления],](https://img.pdfslide.tips/doc/110x75/5f93025305e3fc02e51ef56b/623-pj-662pj-663-pj-622pj-f-f.jpg)