Embed Size (px)
Citation preview
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
CINEMATICA DIFFERENZIALE
� relazioni tra velocita dei giunti e velocita dell’organo terminale
Jacobiano geometrico
Jacobiano analitico
Singolarita cinematiche
Analisi della ridondanza
Inversione della cinematica differenziale
Algoritmi per l’inversione cinematica
STATICA
� relazioni tra forze all’organo terminale e coppie ai giunti
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
JACOBIANO GEOMETRICO
��������� � � ����� ��������� �����
� Obiettivo � �� ��������� ��� � ��� ����� ��! � " � �$# � �%����� ��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 2
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
Derivata di una matrice di rotazione
� ��� � � � ��� ������� ��� � � � ��� ��� � ��� �
�� � ��� �����
� Posto � ��� � � �� ��� � � � ��� �� ��� �� � � ��� ������� ��� � � � � � ��� � � � ��� �
� � � � ��� ������ � ���� � � � �
��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 3
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
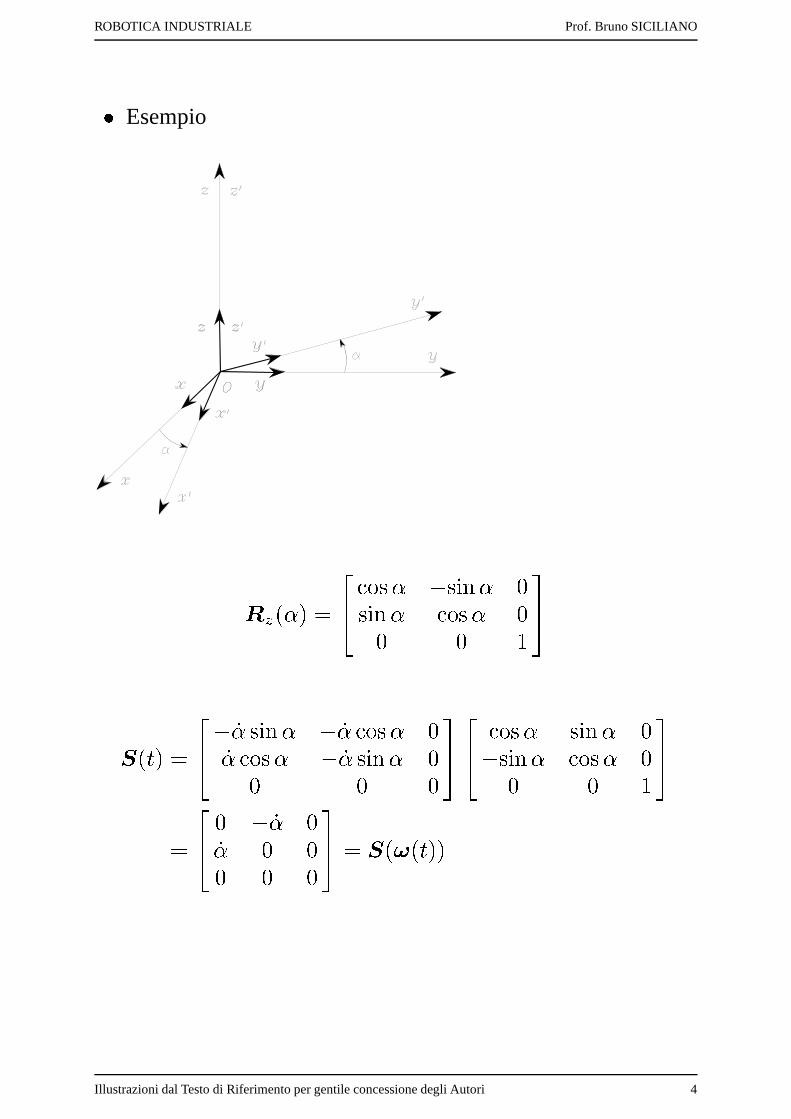
� Esempio
� � ��� � � � ����� � � ��� � ��� � ����� � � ��
� ��� ��� � ��� ��� � �
�� ����� � �
� ����� � ��� ��� �
�� � ����� � ��� � � ��� � ����� � � ��� � �
�� �
�
�� � � � � ��� � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 4
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
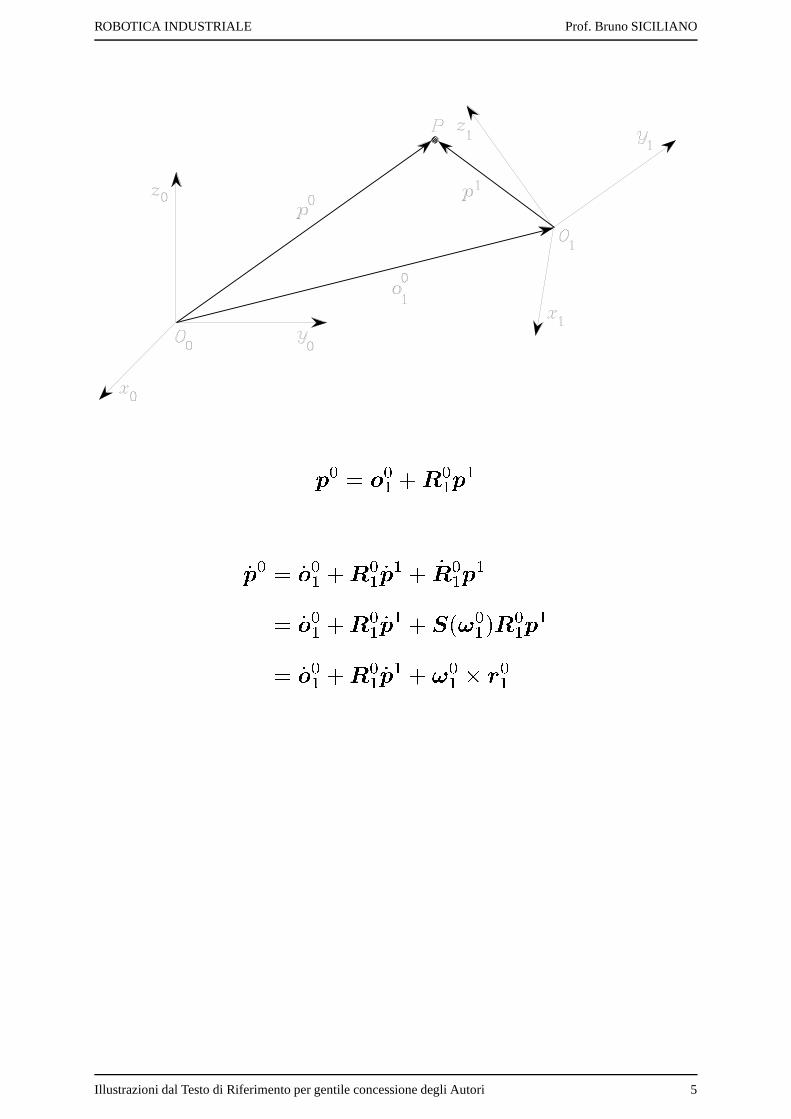
�� ����� ��� � � � �� � � �� � ��� � � � � � �
�� � � �� �
��� � � � � � � � � � � � � � � � � � �� ���� ��� � � � � � � � � ������
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 5
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
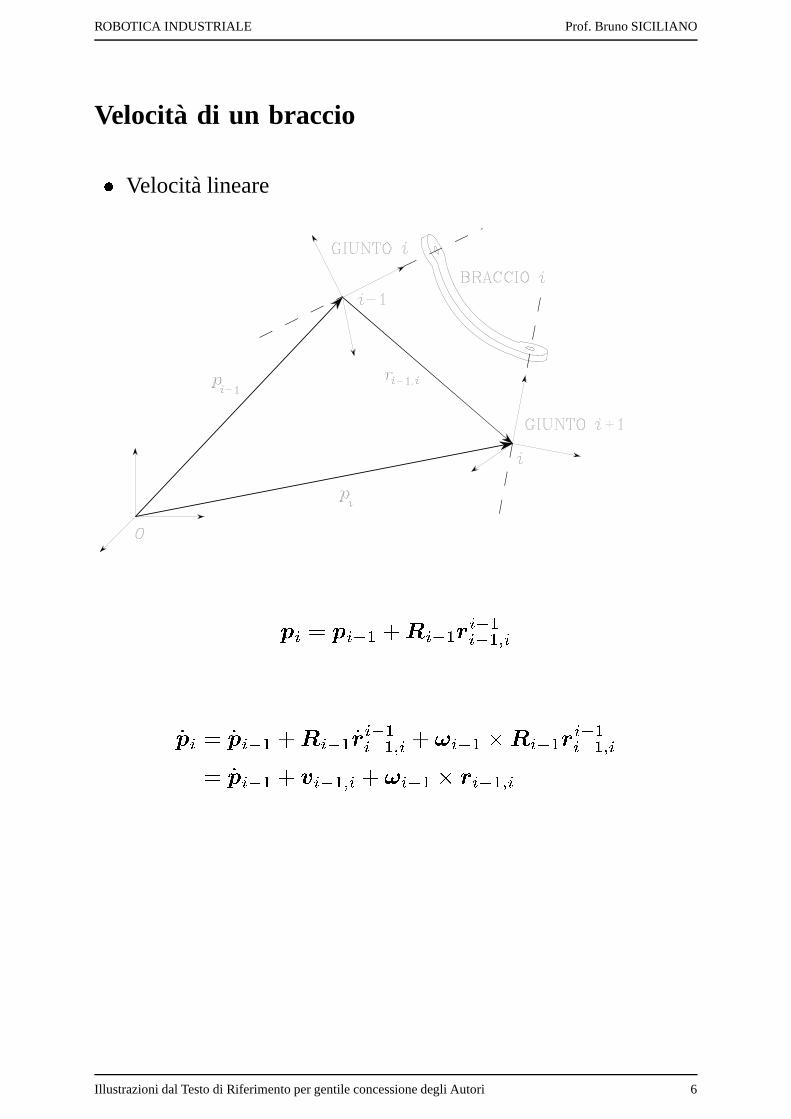
Velocita di un braccio
� Velocita lineare
�� � ���� � � � � � � � � ��
���
�
� ���� � ���� � � � � � �� � � ��
���
� � � ��� � � � � � � � � ��
���
�� � ���� � ! �
���
� � � ��� � ���
���
�
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 6

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Velocita angolare
� � � � � � � � � � ��
� � � � � � � � � � � � � � � � � � � � � � � � � � � �����
� � � � � ��� � � � � � � � � � � � � � � � � � � � �����
� � � �� � � � ��� � � � � � � � � ��
���
�� � ��� � � �
���
�
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 7

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� � � � ��� � � �
���
�� � � � ��� � ! �
���
� � � ��� �� �
���
�
� Giunto prismatico� ����
� � �! ����
��� �� ��� �
��
� � � � ���� � � � �
�� �
�� � � �
�� � � � � � �
���
�
� Giunto rotoidale� ����
� � �� � � �
��! �
���
� � � ����
� �� ����
�
� � � � ��� �
�� ��� �
��� �� � � ��
�� � � � � ���
���
�
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 8
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
Calcolo dello Jacobiano
� � � � � � � ��������� � � � � � ��
� Velocita angolare� giunto � prismatico�
� � � � � � � �� � � � � �� giunto � rotoidale�
� � � � � � �� � � �
�� �� � � � � � �
��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 9
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
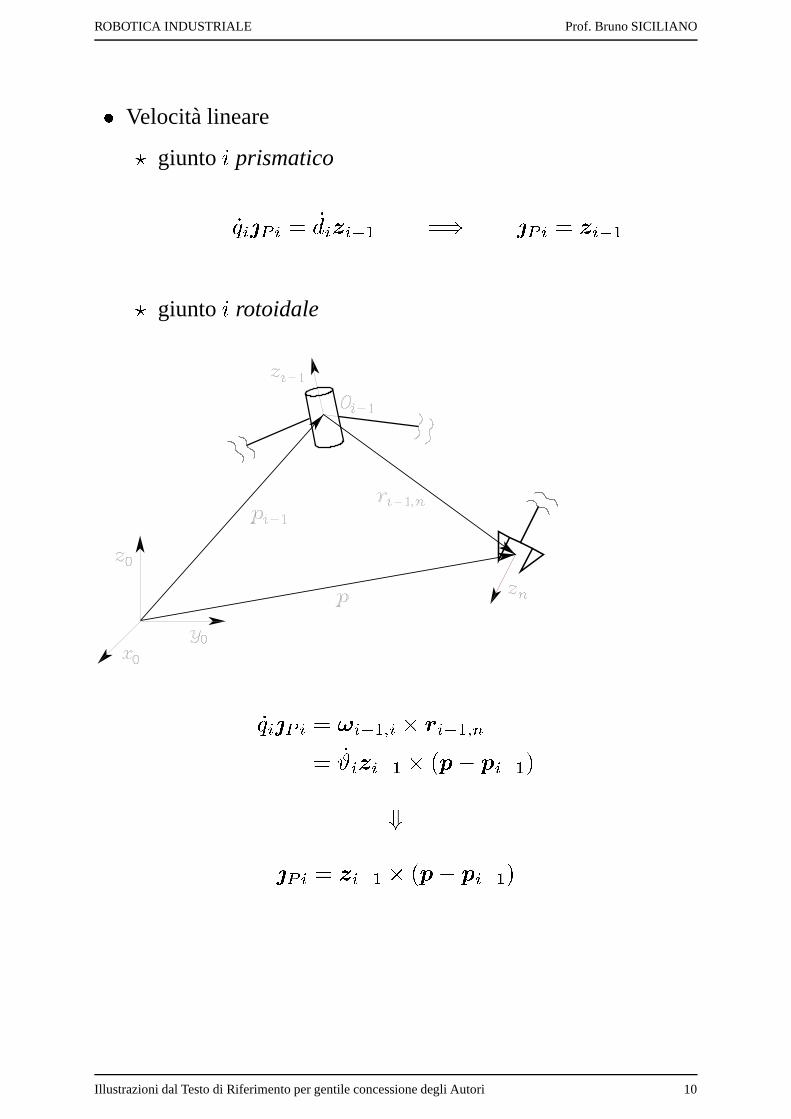
� Velocita lineare� giunto � prismatico�
� � � � � � �� � � �
�� �� � � � � � �
��
� giunto � rotoidale
�� � � � � � � �
���
� �� ����
�� �� ��� �
�� � � � ��
�� �
�
� � � � � ��� ��� � ��
�� �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 10

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Colonna dello Jacobiano geometrico
" � � �� � � # � ���� ���" � � � �� # per un giunto prismatico" � � � � ��� � � � � �
� ��� # per un giunto rotoidale
� � ��� � � � � � � � � ����� � � ���� � � � � � � � � � �
� � ���� � � � � � � ����� � � � �� � � � � � �� � �
�� �� � � � � � � ����� � � ���� � � � � � � � � � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 11
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Rappresentazione in terna differente
" � ��� � # � " � � �� � � # "
� � #� " � � �� � � # �
��� � � " � � �
� � � # �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 12
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
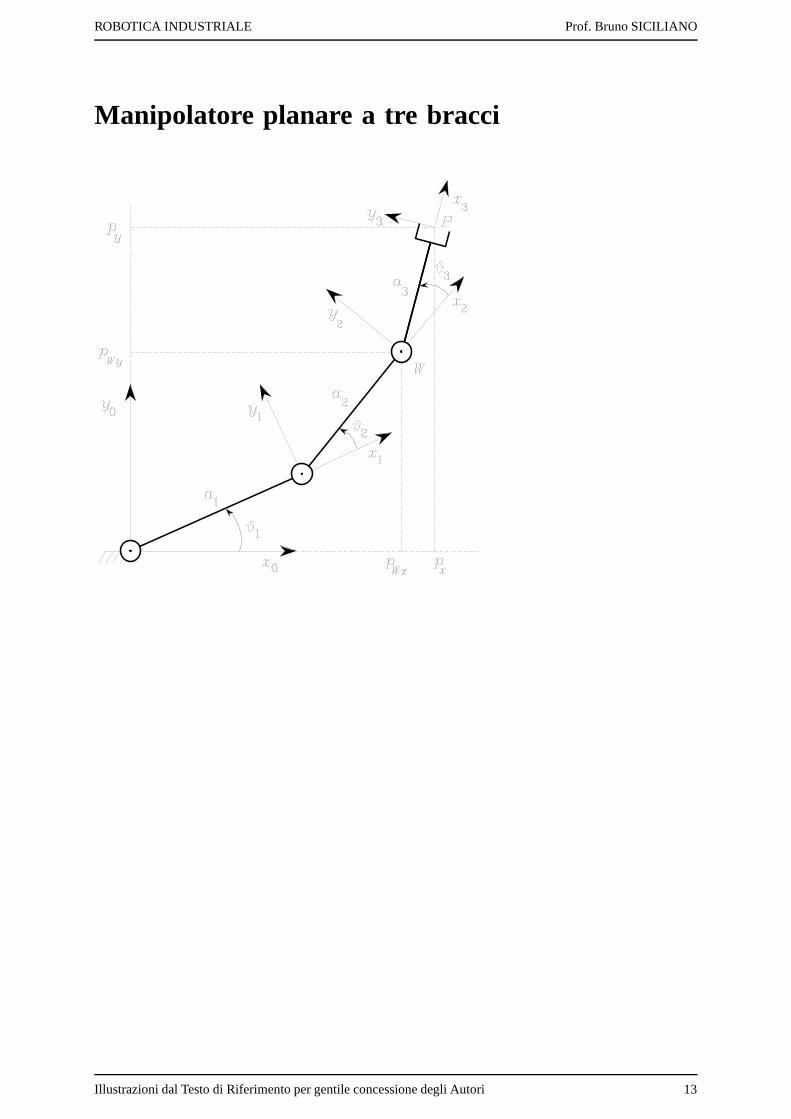
Manipolatore planare a tre bracci
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 13
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
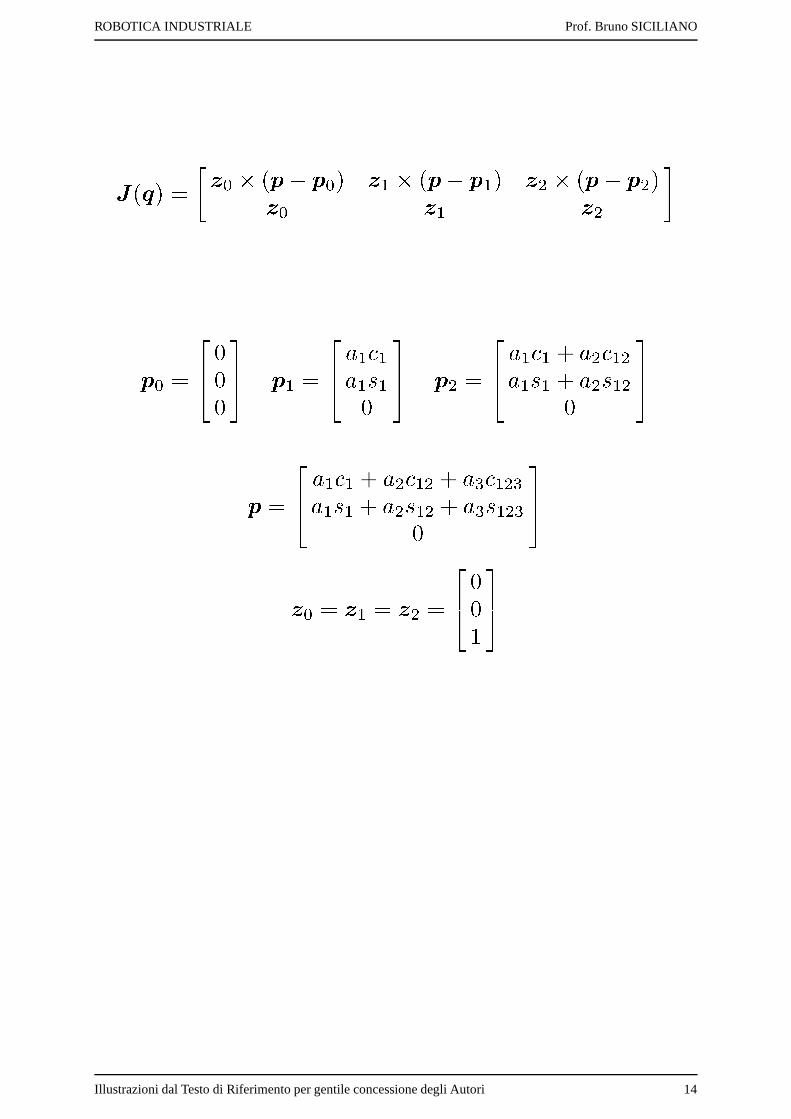
�%������� " � � ��� � � � � � � � � � � � � ��� � � �� � � � � � #
� � � �� � � � � ��� �� ��� �
�� � � � � ��� � � � � � � �� ��� � � � � � � �
�� �� � � ��� � � � � � � � � ��� � � � �
� ��� � � � � � � � � � � � � � �
��� � � � � � � � � � � ��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 14
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
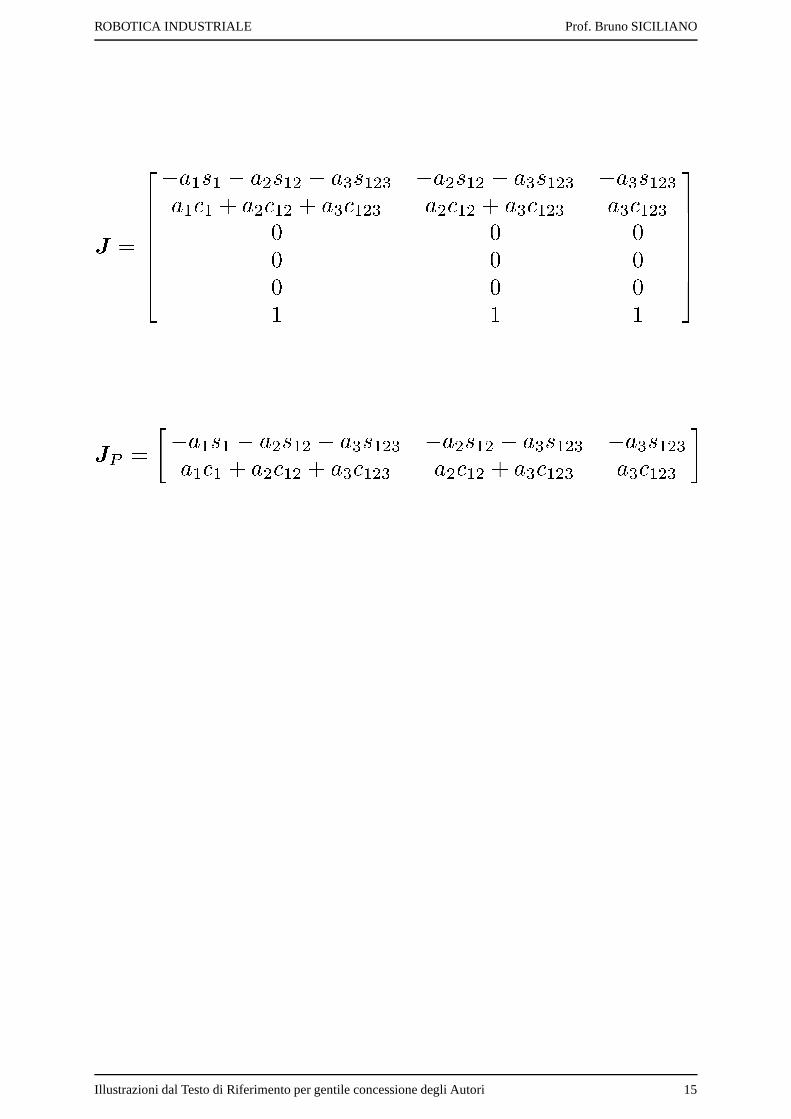
� � �� � ��� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �� ��� � � � � � � � � ��� � � � � � � � � � � ��� � � � � ��� � � � �
� � �
��������� � � " � � ��� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � #
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 15
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
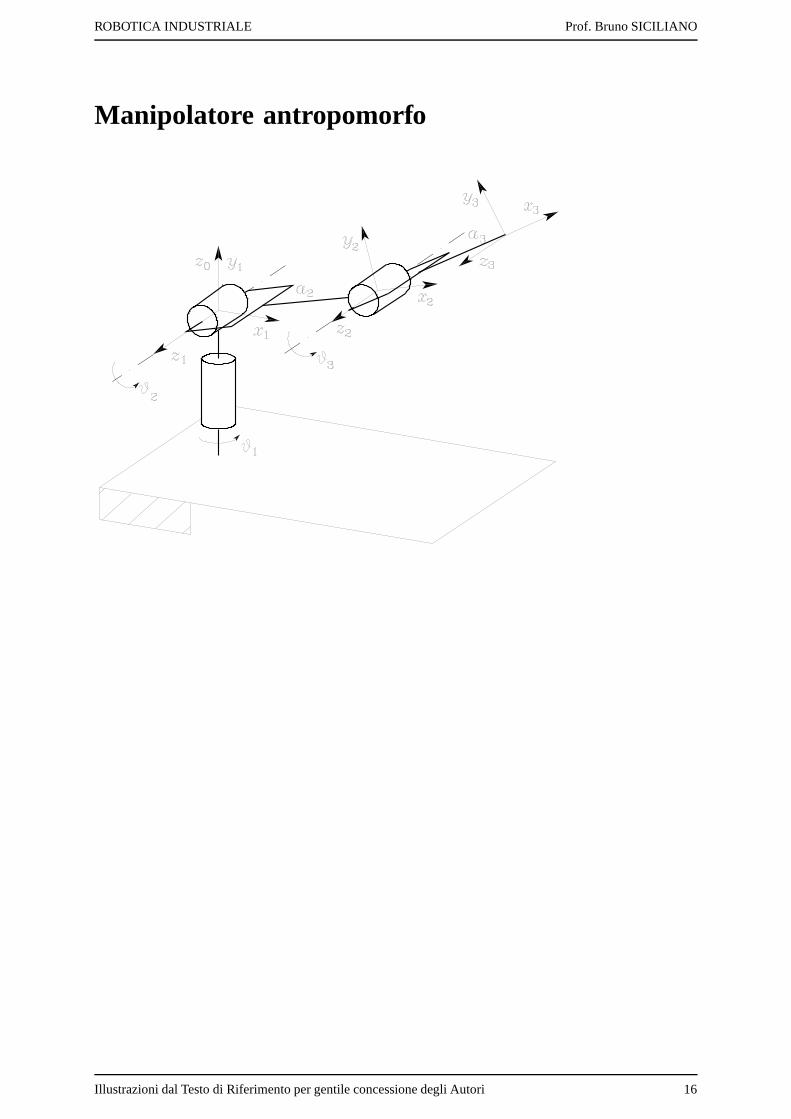
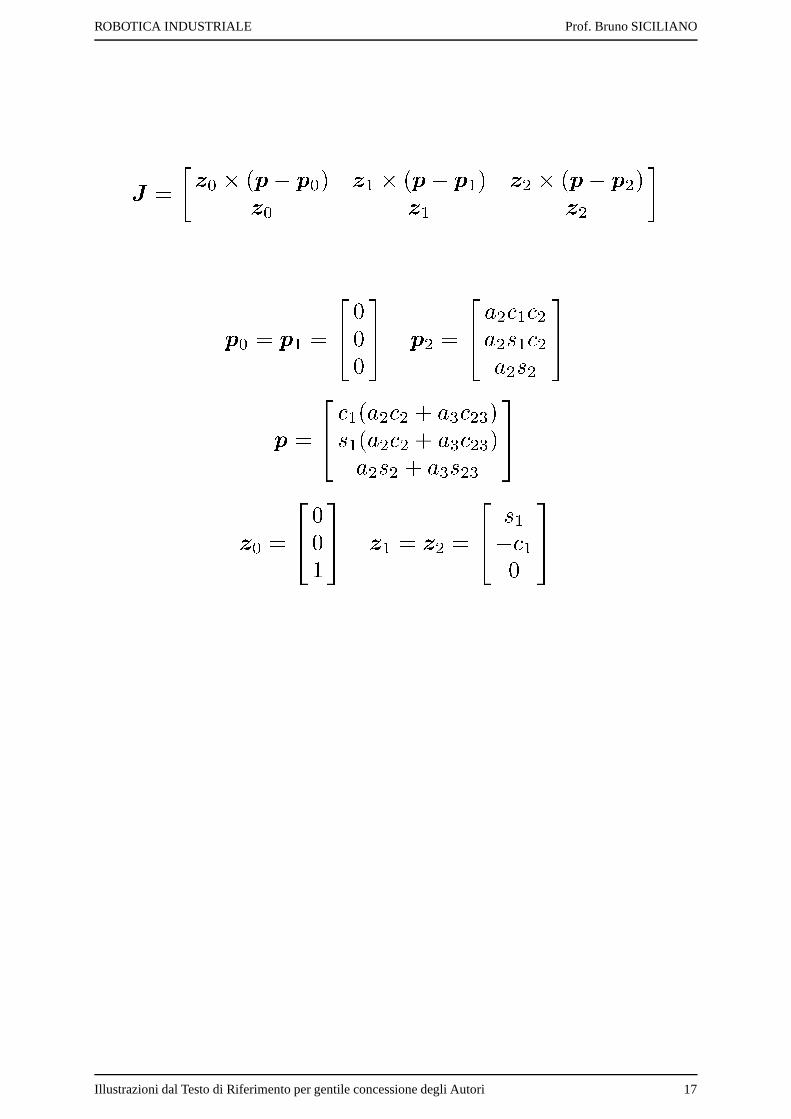
Manipolatore antropomorfo
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 16
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� � " � � � � � � � � � ��� � � � � � � � � � �� � � � � � #
� � � � � �� � � � � � � ��� �� � � ��� �� � � �
�� �� � � � � � � � � � ��� � � � �
� � � � � � � � � � � � � �� � � � � � � � � �
��� � � � � �� � � � � � � � � �
� � �
��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 17
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
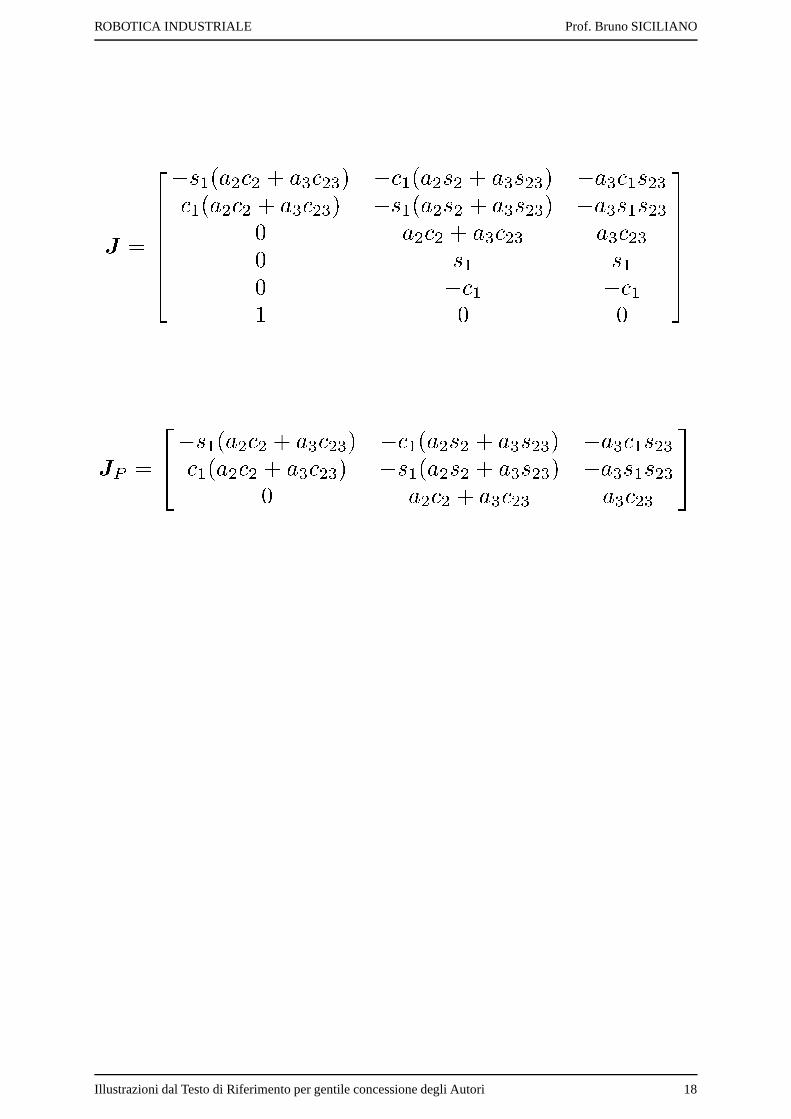
� � �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��� � �� � � � � � � � ��� � � � � � � � � � � � � � ��� � � � � � ��� � � � � � � � � � � ��� � � � ��� � � � � � � �
� � � � � ��
��������
� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��� � �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��� � � � ��� � � �
��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 18
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
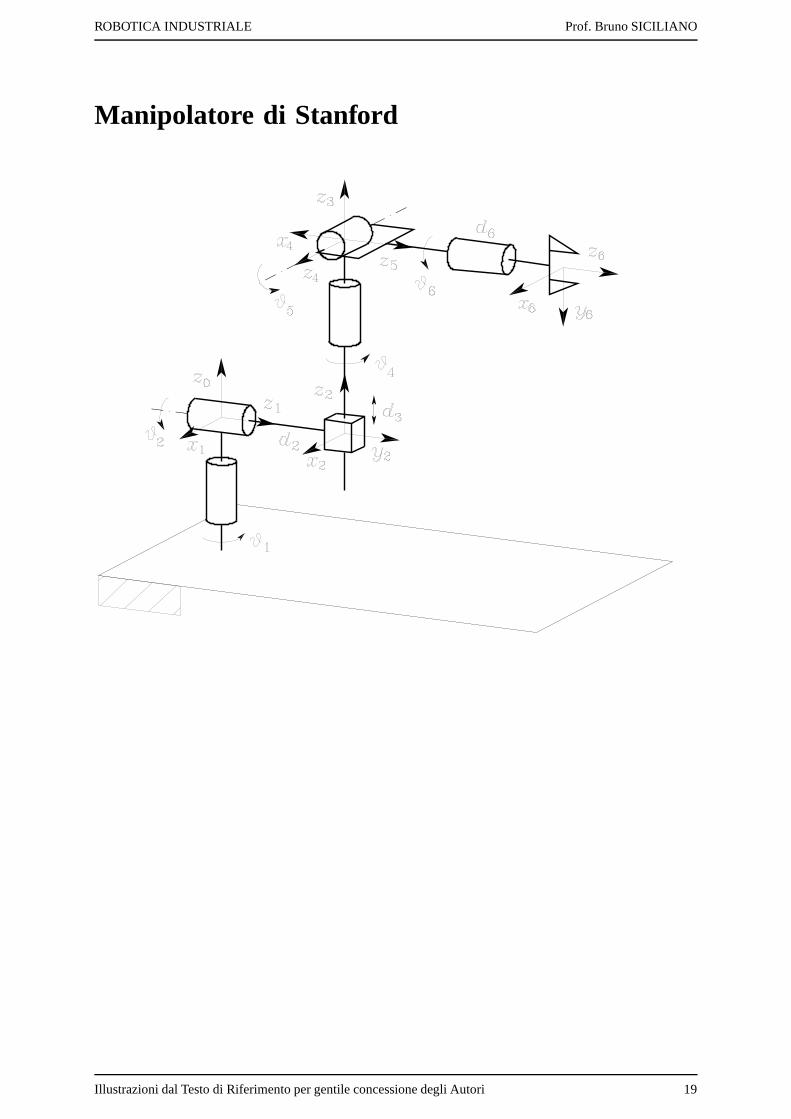
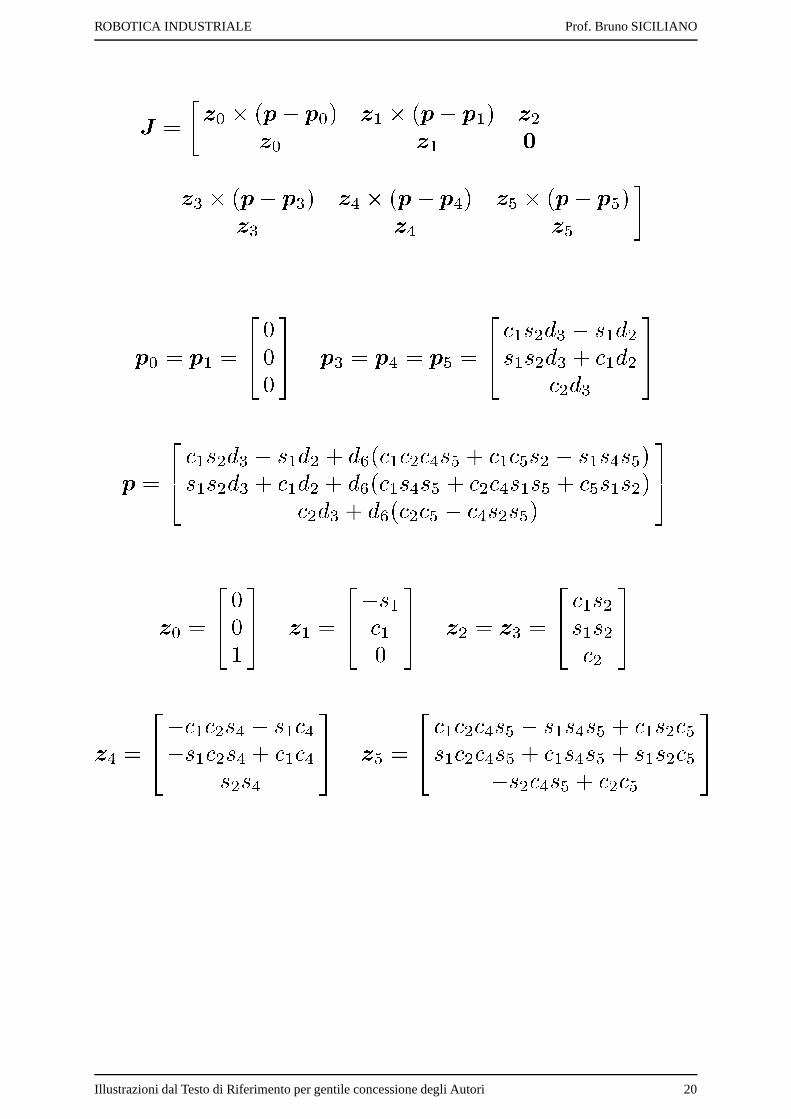
Manipolatore di Stanford
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 19
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� � " � � � � � � � � � ��� � � � � �� � � � �
� � � � � � � � � ��� � � � ��� � � � �� �� � � � ��� #
� � � � � �� � � � � �� � � � ��� � � � � � � � �� � � � � � � � � � �
� � � ���
� � � � � � � � � � � � � � ��� � � ��� � � � � � � � ��� � � � � � � ��� � �
� � � � � � � � � � � � ��� � � � � � � � � � � � � � � � � � � � � � � � �� � � � � ��� � � � � � � �
�� � � � �
��� � � � � �� � � � � � � �
� �
�� � � � � � � � � ��� �� � � �� �
��� � � � � � � � � � � � � � �
�� � ��� � � � � � ����
� � � ��� ��� � � � � � � � � � � � � � �
�� � � � ��� � � �
� ��� � � � � � � � � ��� � � � � � � � �� � � � � � � � � � � �
��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 20
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
JACOBIANO ANALITICO �� ������� � � ������ �� � � � ���� � � ����� ���
� � � �� � ���� ��� ����� ���
� � " � �� # � " � � ������ � ����� # ��� ��� ����� ����� ������� ��� �����
� �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 21
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
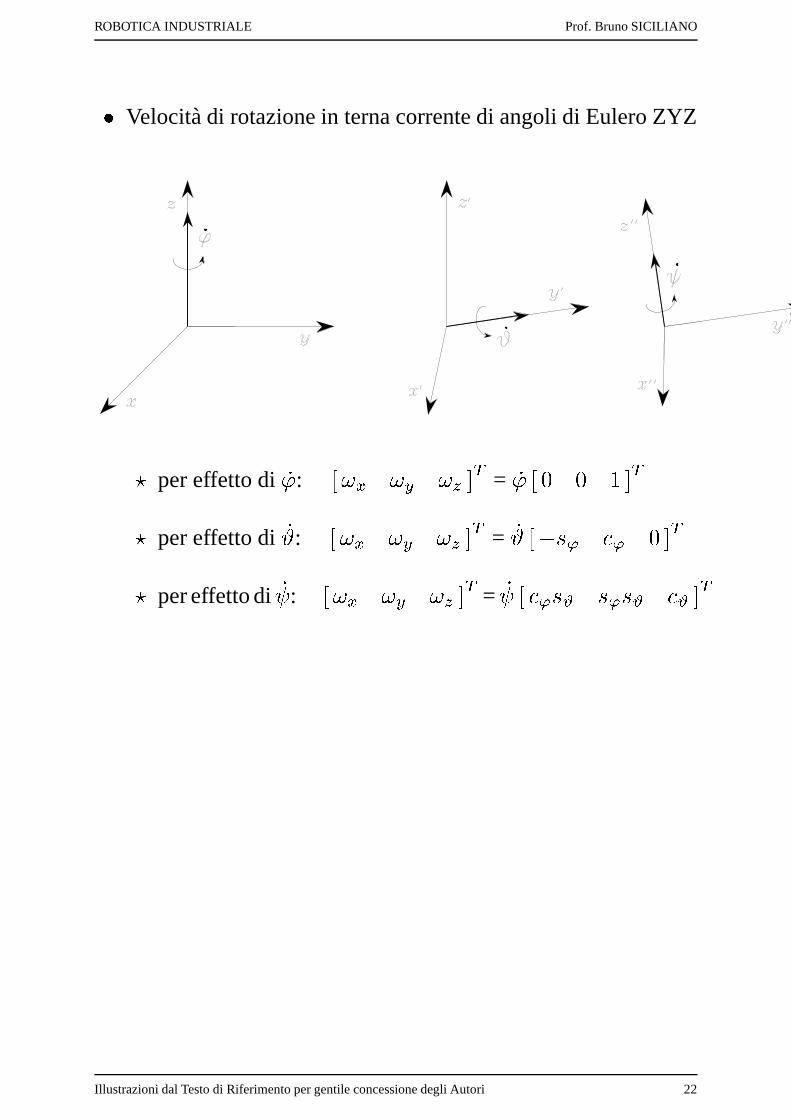
� Velocita di rotazione in terna corrente di angoli di Eulero ZYZ
� per effetto di
�� : � � � ��� ����� �
=
�� � � � �
� per effetto di
��
: � ��� ��� ����� �=
�� � � ��� � � �� �
� per effetto di
��
: � � � � � � � � �=
�� � ��� � � � � � � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 22

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Composizione di velocita di rotazione elementari
� � � � ��� � � � � � ��� � � �
�� �� � ��� � � ��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 23
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
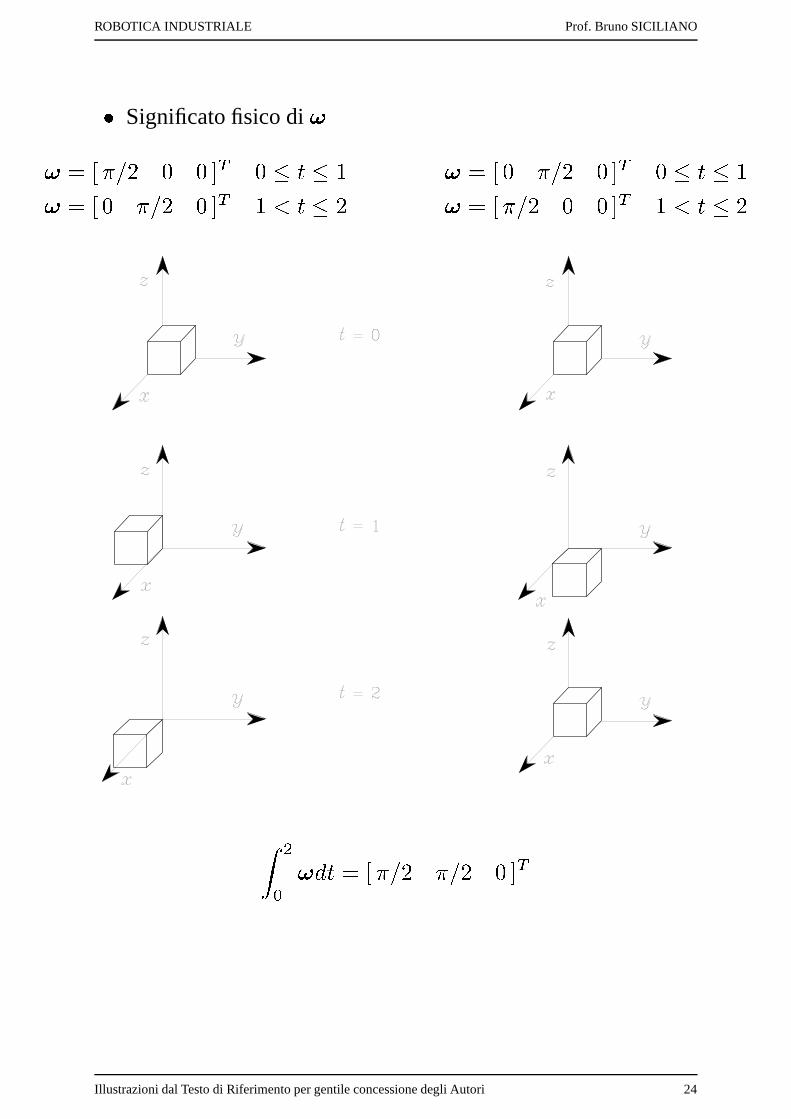
� Significato fisico di �� � ��� ��� � � �� � � � � � � ���� �� � �� � � �� � � �
��� � � ��� � � � � � ��� ��� �� � ��� � � �
��� � ��� ��� ��� �
��� � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 24
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
Relazione tra Jacobiano analitico eJacobiano geometrico
! � " � �� ��� � � # �� � � � � � � ��� � � ��� � � ���
� Jacobiano geometrico� grandezze di significato fisico
� Jacobiano analitico� grandezze differenziali di variabili nello spazio operativo
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 25
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
SINGOLARITA CINEMATICHE
! � �%����� ��� se
�diminuisce di rango
��singolarita cinematiche
(a) perdita di mobilita
(b) infinite soluzioni al problema cinematico inverso
(c) velocita elevate nello spazio dei giunti (nell’intorno di unasingolarita)
� Classificazione� Singolarita ai confini dello spazio di lavoro raggiungibile� Singolarita all’interno dello spazio di lavoro raggiungibile
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 26
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
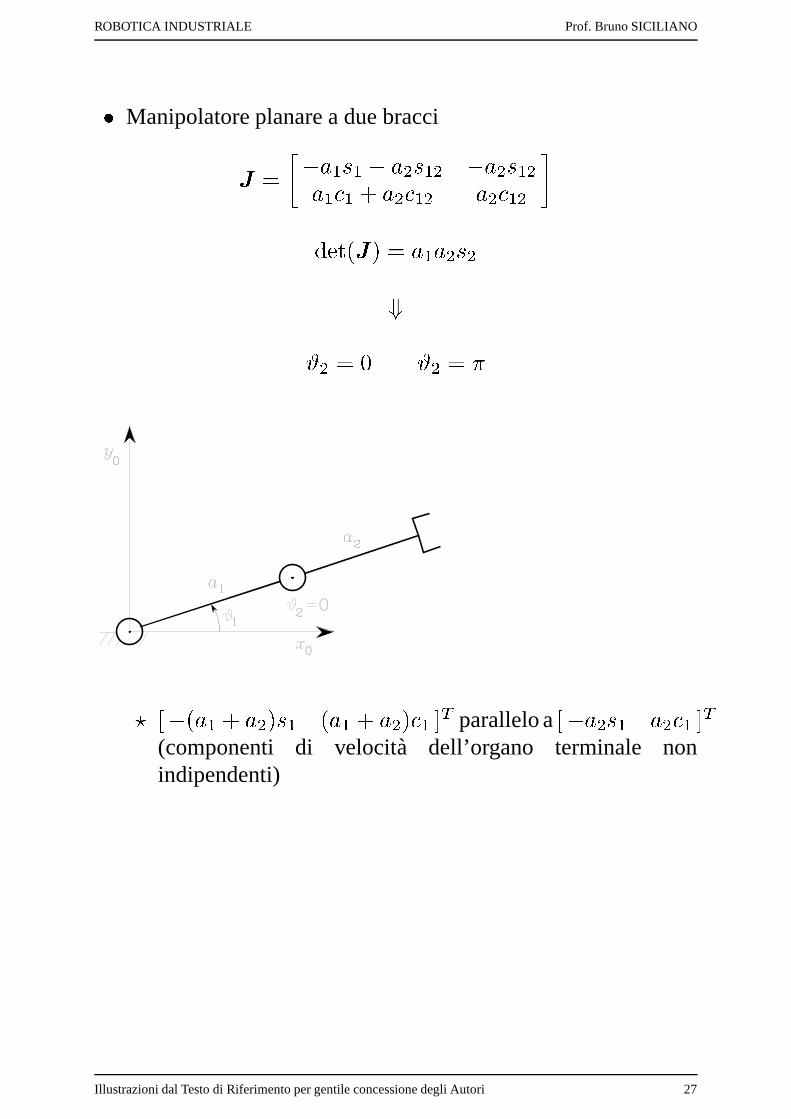
� Manipolatore planare a due bracci� � " � � � � � � � � � � � � � � � � �� ��� � � � � � � � � � � � � #����� � � � � � � � � � �
�
� � � � � � �
� � � � � � � � � � � � � � � � � � � � � � � parallelo a � � � � � � � � � � � �(componenti di velocita dell’organo terminale nonindipendenti)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 27
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
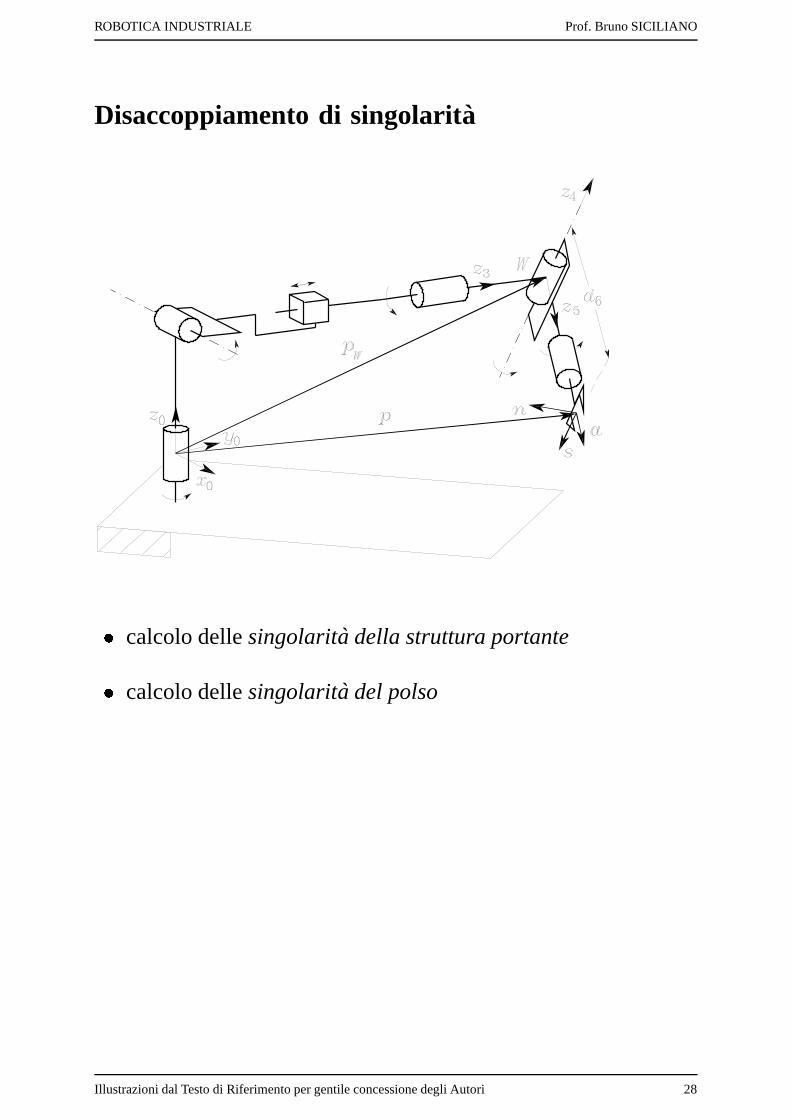
Disaccoppiamento di singolarita
� calcolo delle singolarita della struttura portante
� calcolo delle singolarita del polso
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 28
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� � " � � � � � �� � � � � � #� � � � � � � ��� � � � � � � � � � � ��� ��� � �� ���
� � � � � � � � � � ���
� �� �� �� �� � ��
paralleli a� �
, � �������� � � � � � � � � ������ � � � � ����� � � � � � ����� � � � � �
����� � � � � � � ����� � � � � ���
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 29
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
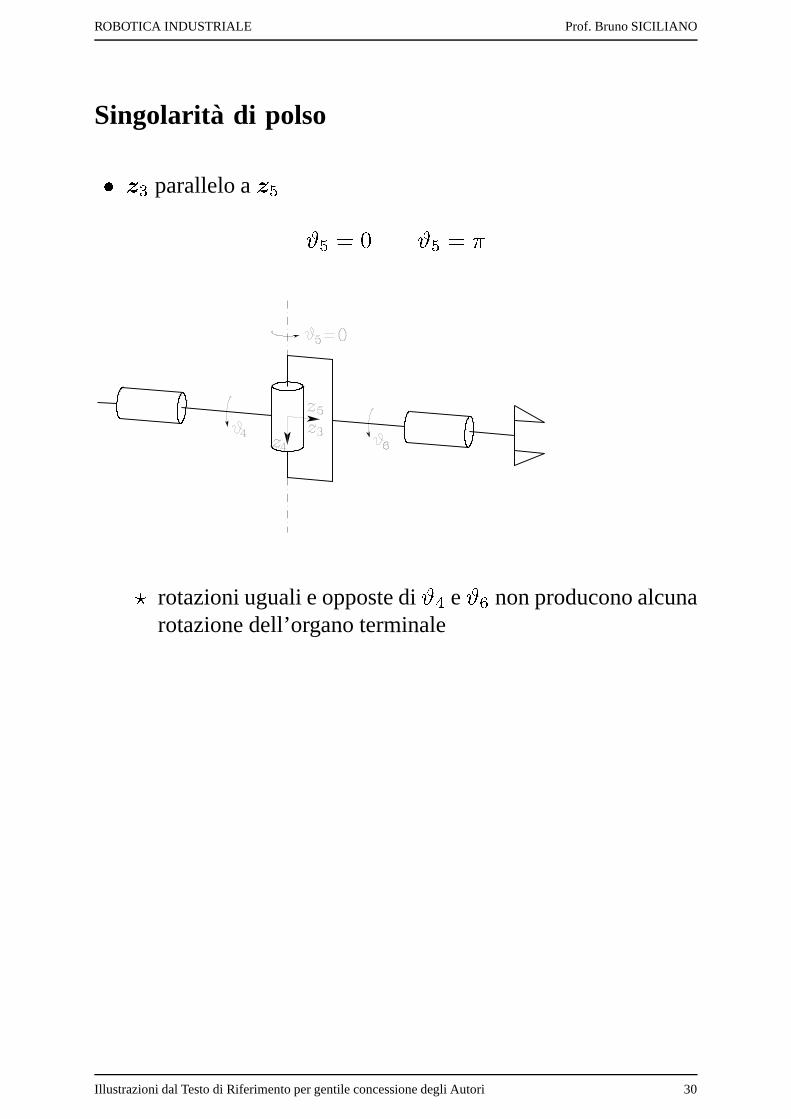
Singolarita di polso
�� � parallelo a
� �
� � � � � ��
� rotazioni uguali e opposte di� � e
� �non producono alcuna
rotazione dell’organo terminale
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 30
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
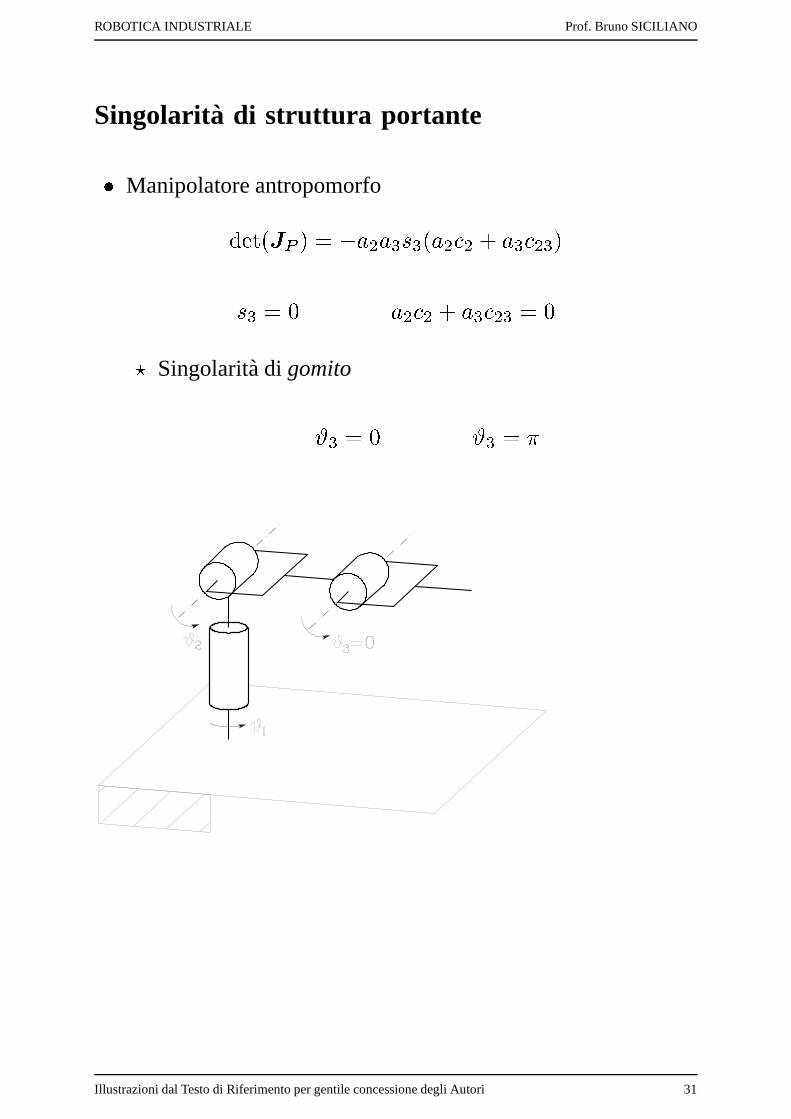
Singolarita di struttura portante
� Manipolatore antropomorfo
����� � ��� ��� � � � ��� � � � � � � � � ��� � � � �� � � � � � � � ��� � � � �
� Singolarita di gomito
� � � � � � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 31
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
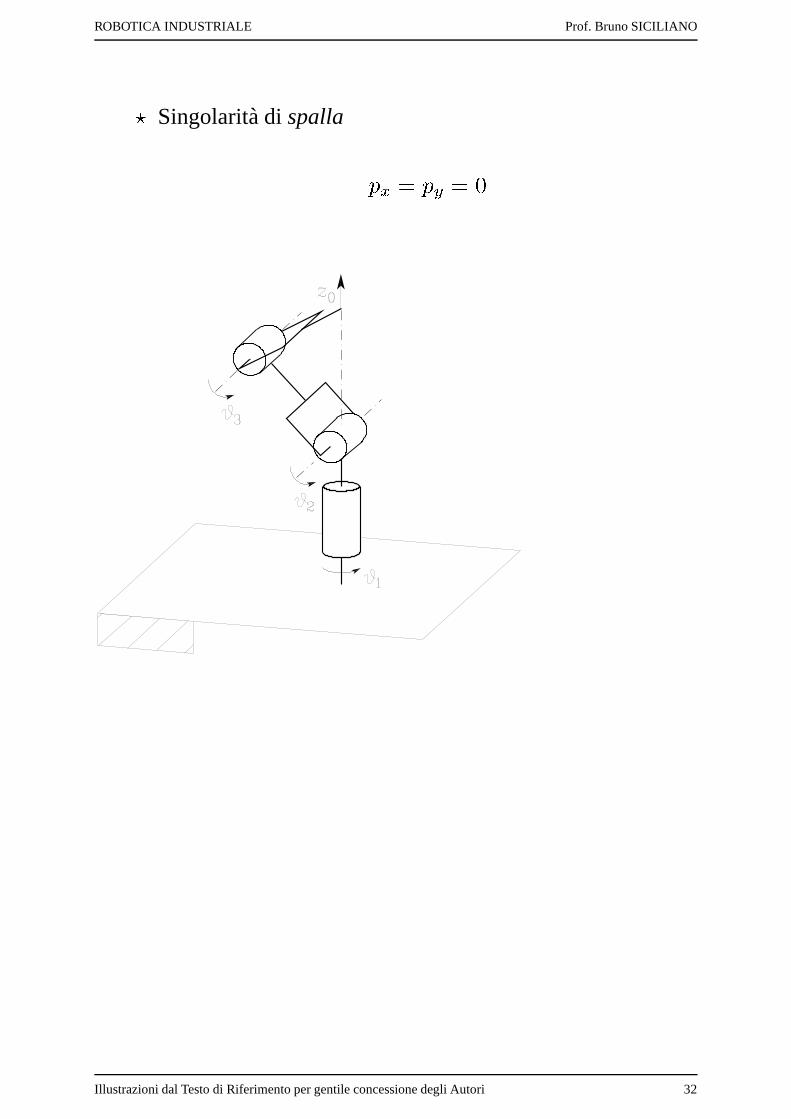
� Singolarita di spalla
� � � � � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 32
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
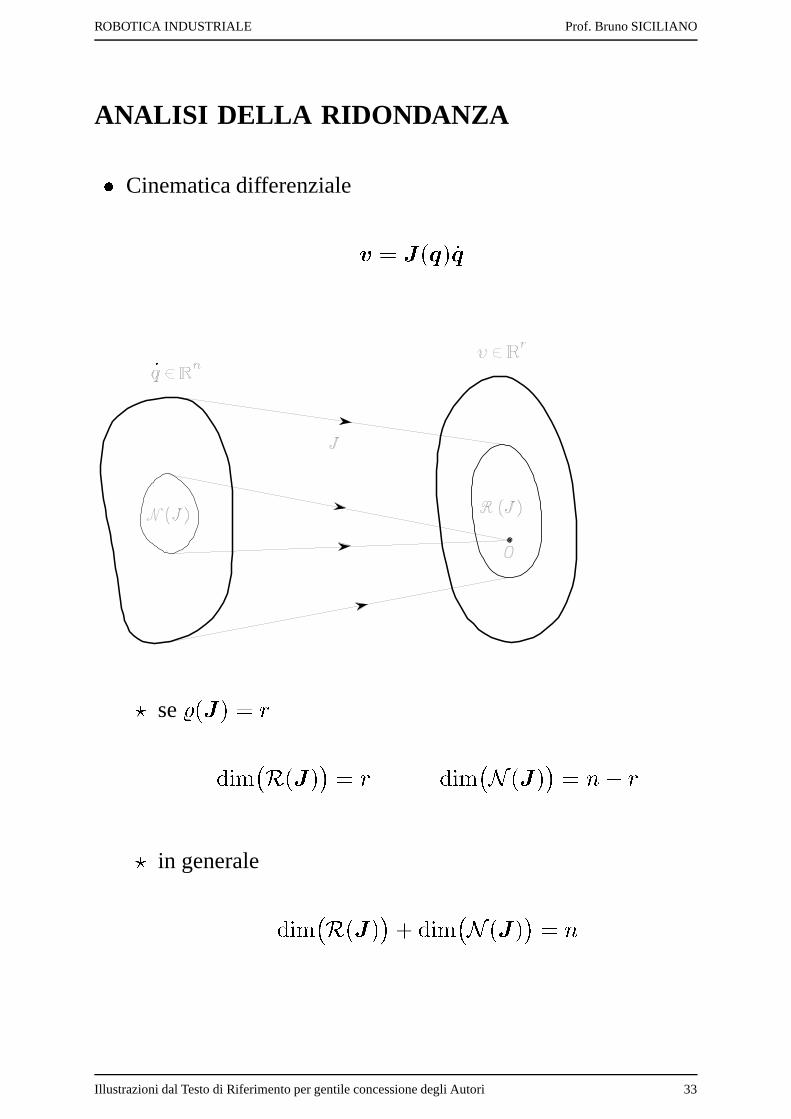
ANALISI DELLA RIDONDANZA
� Cinematica differenziale ! � �%����� ��
� se � � � �����
� ������� � � � ��� � ������� � � � � � � �
� in generale
� ������� � � � � � ������� � � � ���
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 33

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Se � � � ������ ���� ���� ��� ���ove � �� ��� � � � �� verifica: � ���� � ���� � � � ��� � � ���� � !
�
�� �genera moti interni della struttura
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 34
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
INVERSIONE DELLA CINEMATICADIFFERENZIALE
� Equazione cinematica non lineare
� Equazione cinematica differenziale lineare nelle velocita
� Data ! ��� � + condizioni iniziali��
(����� � � ������ �
)� se
� � � ���� � � � ����� !����� � � �
�
������ � � � � ��� �� regola di integrazione numerica (Eulero)��������� � ��� ������� ��� �������� ��� �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 35

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
Manipolatori ridondanti
� Per una data configurazione�
, trovare le soluzioni
��che
soddisfino ! � � ��e che minimizzino
� � ������ ��
������ ��� metodo dei moltiplicatori di Lagrange
� � �� ��� ��� ��
������ �� ��� � � ! � � �� �� � ����� � � � � � �
� ��� � �
� soluzione ottima���� � �� � � � ��� �
� � � � � � !� se
� ��� ���� � � !ove � �%� � � � � � � � � �e la pseudo-inversa destra di
�Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 36

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Utilizzo della ridondanza
��� � ������ ��� ���� � ����� � � �� � ��� �
� come sopra �����
� � � �� ��� ��� ��� �� � � �� �� � � �� � �� � ��� � � � ! � � ����
� soluzione ottima ���� � � ! � � � � � � � � �� �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 37

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Caratterizzazione dei moti interni�� � � � � � ��� ������ � � �
� misura di manipolabilita
� ����� � ����� � �%����� � � ������ distanza dai fine-corsa dei giunti
� ����� � � �� �
����� �
� � � � �� �� ��� � � �� � �
� distanza da un ostacolo
� ����� � � ����� ������ � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 38

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
Singolarita cinematiche
� Le soluzioni precedenti valgono solo se�
e di rango pieno
� Se�
non e di rango pieno (singolarita)� se !�� � � � � ��
soluzione
��estraendo tutte le equa-
zioni linearmente indipendenti (traiettoria “fisicamente”eseguibile)
� se ! �� � � � � ��il sistema non e risolvibile
(traiettoria non eseguibile)
� Inversione nell’intorno di singolarita� ����� � � �
piccolo�� ��
elevate
� inversa a minimi quadrati smorzata��� � � � � � � � � � � � � � �ove
��minimizza
��� � � ������ ! � � �� � � � � �� �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 39
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
ALGORITMI PER L’INVERSIONECINEMATICA
� Inversione cinematica����� ��� � � � ����� � ��� � � � ������� � � � ! ��� � ��� �� fenomeni di deriva della soluzione
� Soluzione algoritmica� errore nello spazio operativo
� � ��� � ��� � �
� � ���� �
� � � ��� ����� ��� trovare
���� ���� � � : ��� �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 40

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
(Pseudo-)inversa dello Jacobiano
� Linearizzazione della dinamica di errore���� � � �� ����� � ���� ��� � ���
� ��� � � �
� Per un manipolatore ridondante���� � �� � ���� ��� � ��� � � � � �� � � � ���
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 41

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
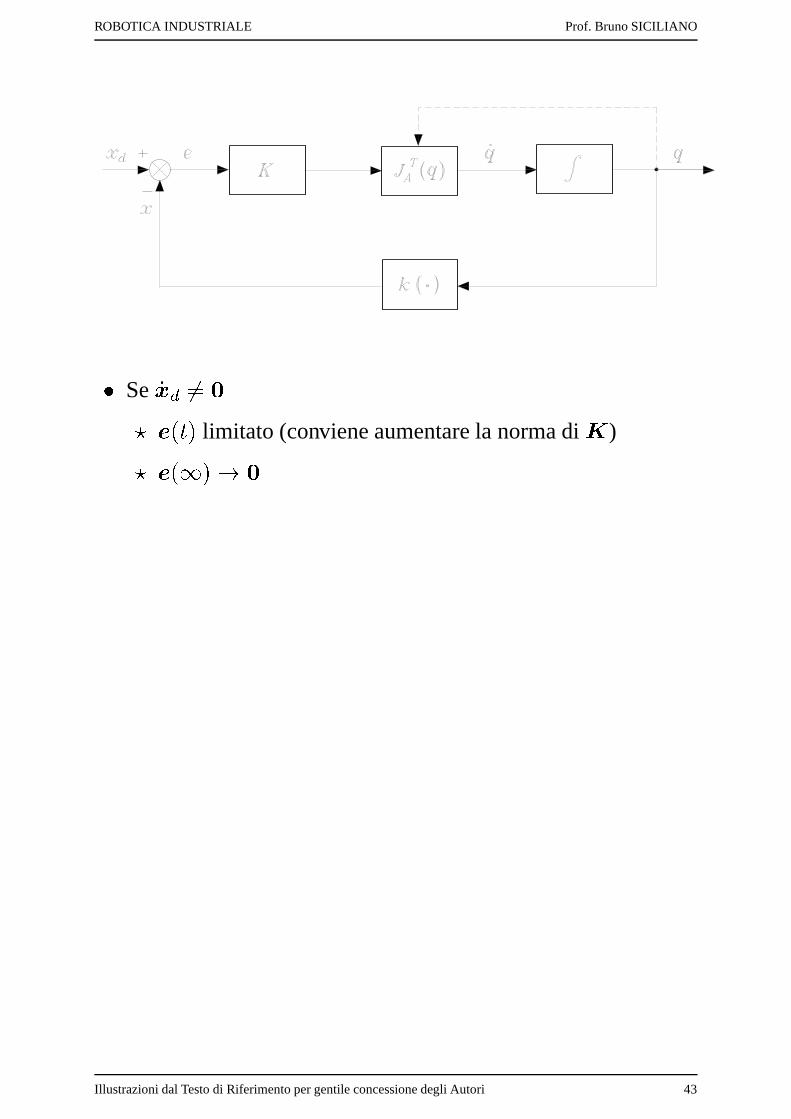
Trasposta dello Jacobiano
�
���� ���� � � senza linearizzare la dinamica di errore
� Metodo di Lyapunov
� � � ��� �� �� � �
ove� � � ��� � � �� � � � � � � �� � � � � � � � �
� � � � � � ��� � � � �
��� � � � � � � ����� ��� la scelta
���� � �� ����� � �comporta che�
� � � ��� � � � ���� � � � � � � ����� � �� ����� � �
� se
���� � � �� �
� � con
� � (asintotica stabilita)
� se � � � �� � ���� �� �� �
se� � � � � � �� ����� �
con ��� �
(stallo?)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 42
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Se
���� �� �
� � ��� � limitato (conviene aumentare la norma di�
)� � ��� � � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 43
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
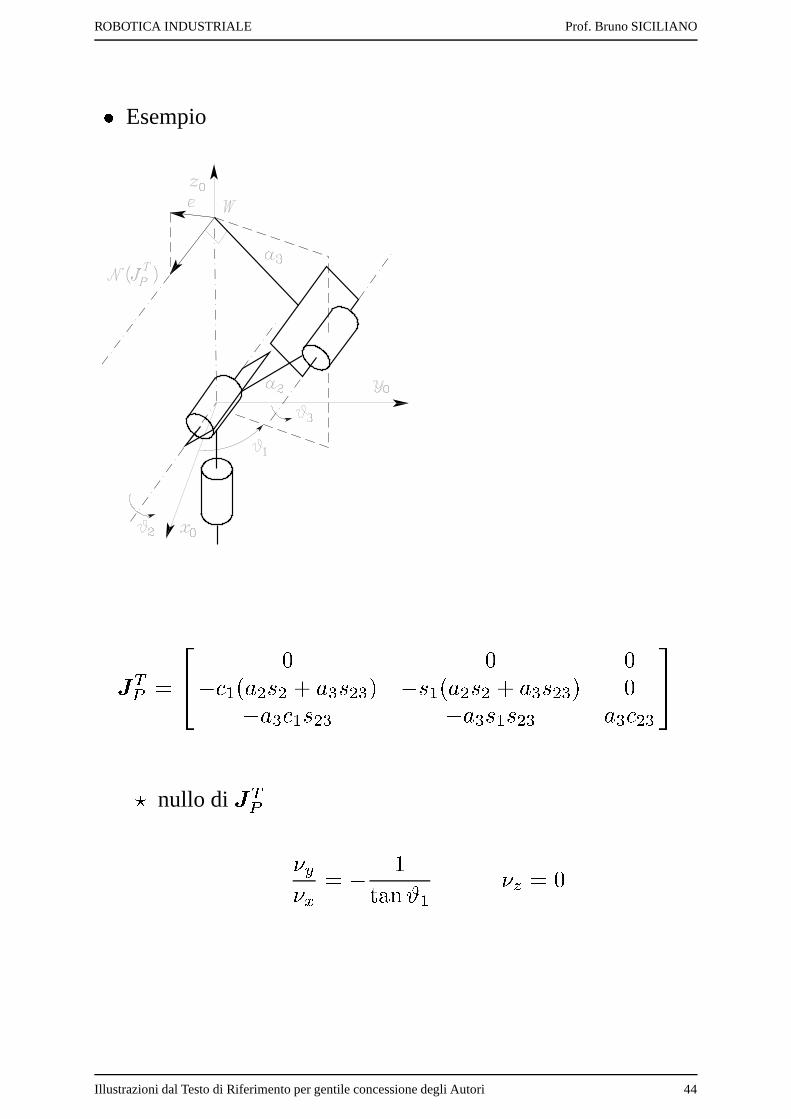
� Esempio
� �� � � � � � � � � � � � ��� � � � � � � � � � � � � � ��� � � � �
� ��� � � � � � � ��� � � � � � ��� � � ���
� nullo di� ��
� �� � � � �
��� � � � � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 44
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
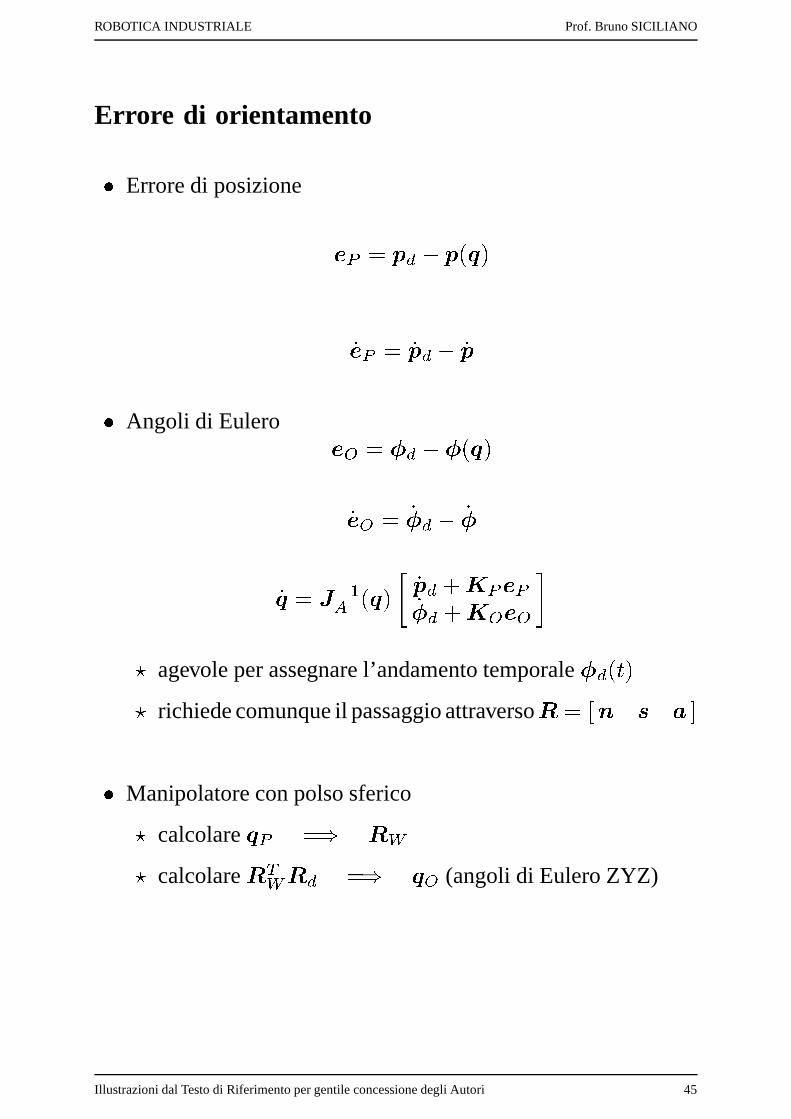
Errore di orientamento
� Errore di posizione
� � � � � �������� � � � � � �
� Angoli di Eulero� � � � � � � ������� � � �
� � ������� � � �� ����� " � � ��� � � ��
� � ��� � � � #� agevole per assegnare l’andamento temporale
� � ��� �� richiede comunque il passaggio attraverso � � ��� � �
�
� Manipolatore con polso sferico� calcolare
� � �� � �� calcolare � � � � � �� � �(angoli di Eulero ZYZ)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 45
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
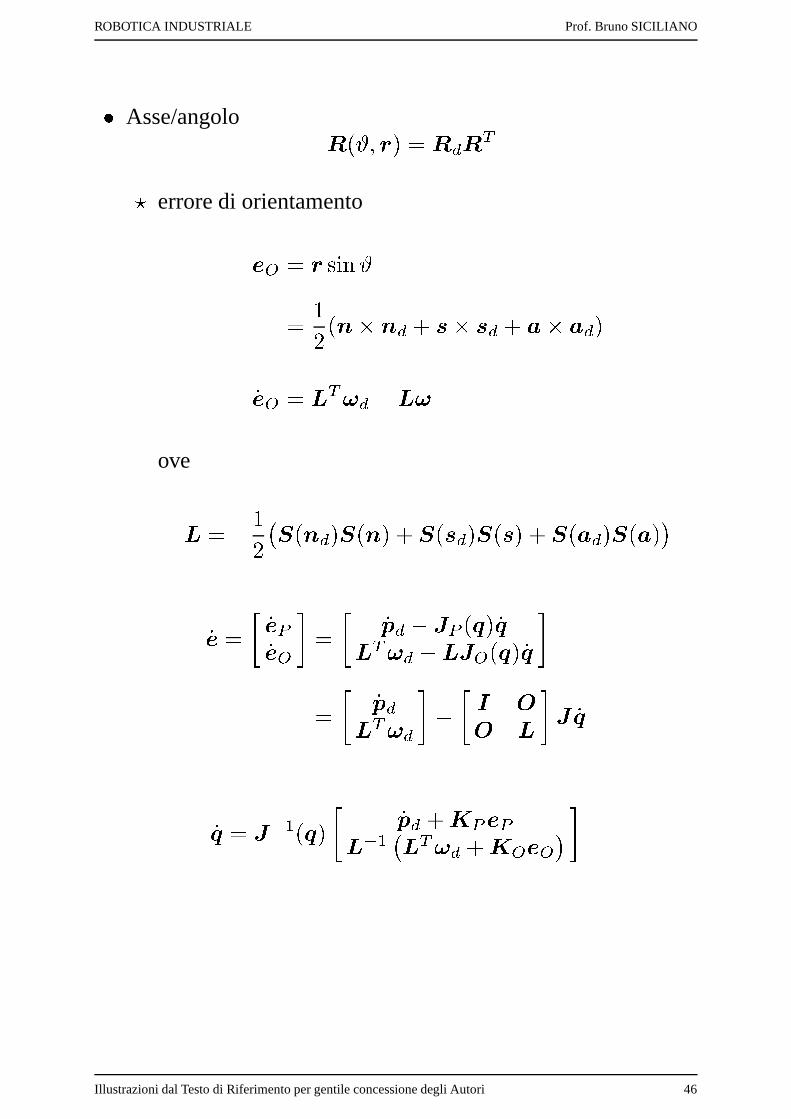
� Asse/angolo � � � � ��� � � � � �� errore di orientamento
� � � � ��� �� �����
�� �
��
�� �
��
�� ��
� � ��� � � � � � �ove
� � � �� � � � � � � � � � ��� � � � � � � � � ��� � � � � � � � � ��
� � " �� ��� � # � " � � � ��������� ��
� � � � � � ��� ����� �� #� " � �� � � � # � " � �
� � # � ������ � � � ����� " � � ��� � � �� �� � � � � � ��� � � � #
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 46
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
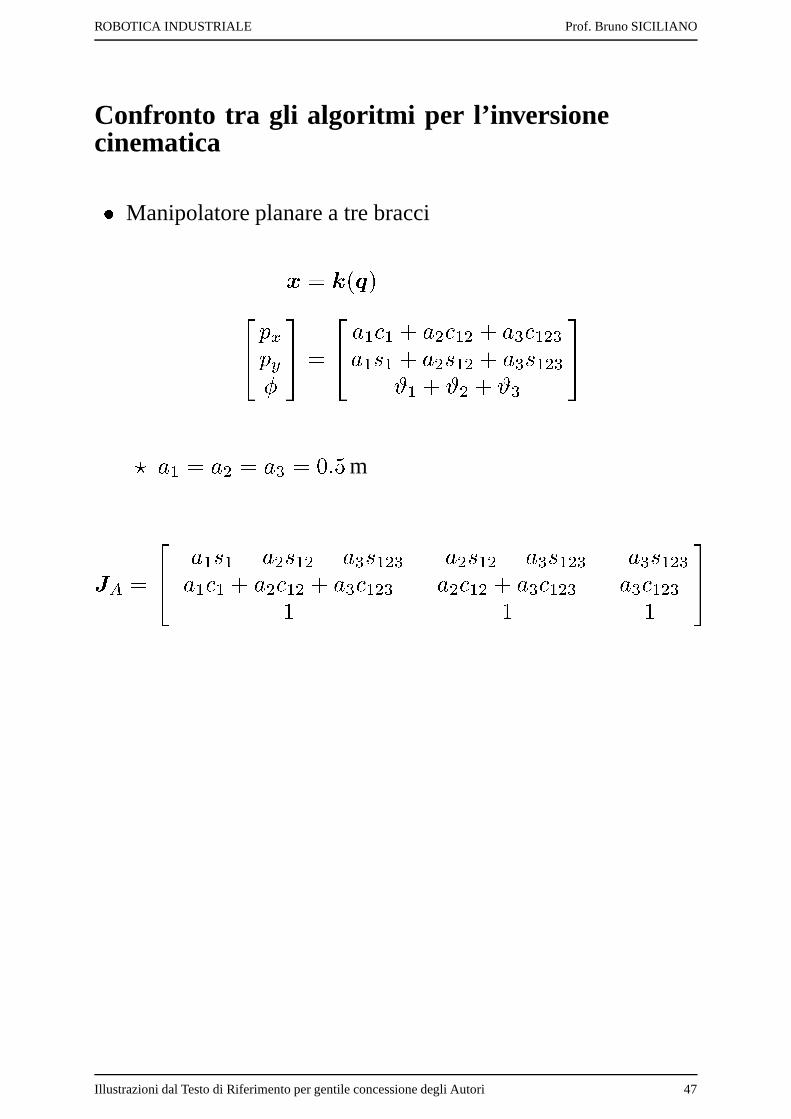
Confronto tra gli algoritmi per l’inversionecinematica
� Manipolatore planare a tre bracci
� � � ������ � �� �
�
�� � � � ��� � � � � � � � � ��� � � � �� ��� � � � � � � � � � � � � � �
� � � � � � � �
��� � � � � � � ��� � � m
� � � � � � ��� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �� � � ��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 47
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� ����� ��� ����� �
���� � �
rad�
� � � � � � � � m� �
rad
� traiettoria desiderata � ��� � � " � � � � � ����� �� �
� � � � � ��� �� � # �� � �
� � ��� � � ��� �� � �� � �
� Simulazione in MATLAB con integrazione numerica di Eulero��������� � ��� ������� �� �������� ��� �e� ��� �
ms
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 48
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
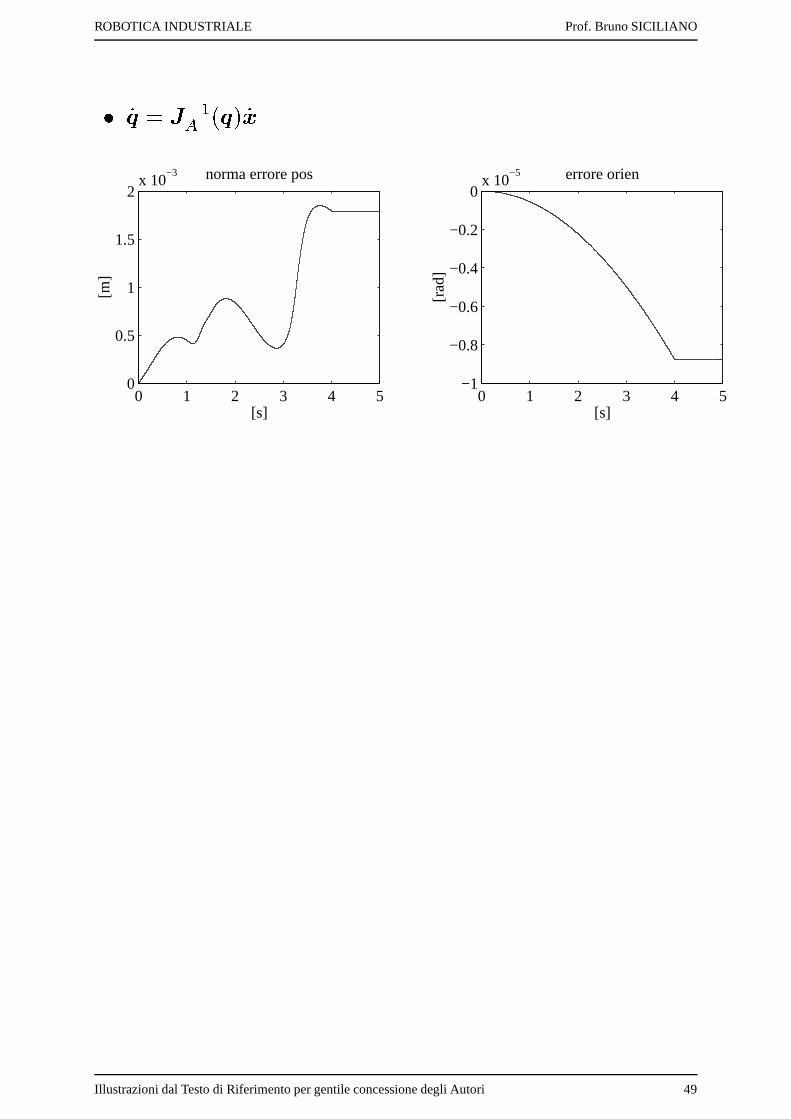
�
���� � � �� ����� ��
0 1 2 3 4 50
0.5
1
1.5
2x 10
−3
[s]
[m]
norma errore pos
0 1 2 3 4 5−1
−0.8
−0.6
−0.4
−0.2
0x 10
−5
[s]
[rad
]
errore orien
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 49
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
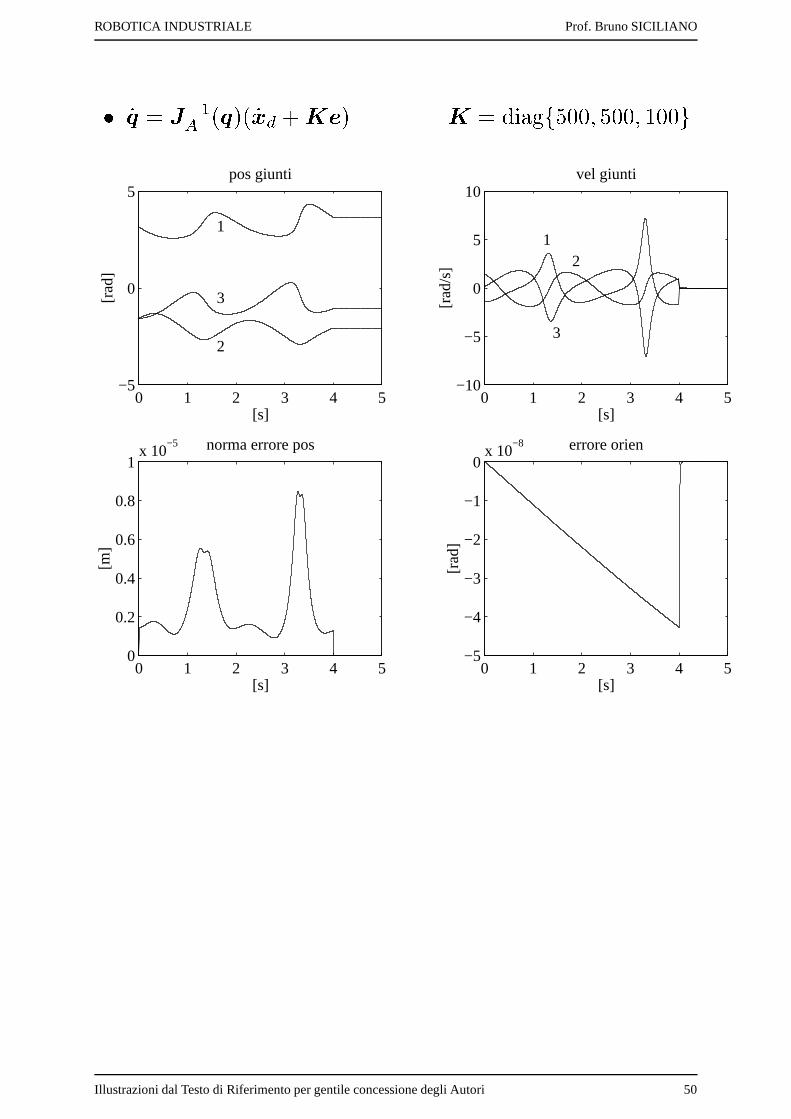
�
���� � � �� ����� � ���� ��� � � � � � � ����� �� � � ��
0 1 2 3 4 5−5
0
5
[s]
[rad
]
pos giunti
1
2
3
0 1 2 3 4 5−10
−5
0
5
10
[s]
[rad
/s]
vel giunti
12
3
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1x 10
−5
[s]
[m]
norma errore pos
0 1 2 3 4 5−5
−4
−3
−2
−1
0x 10
−8
[s]
[rad
]errore orien
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 50
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
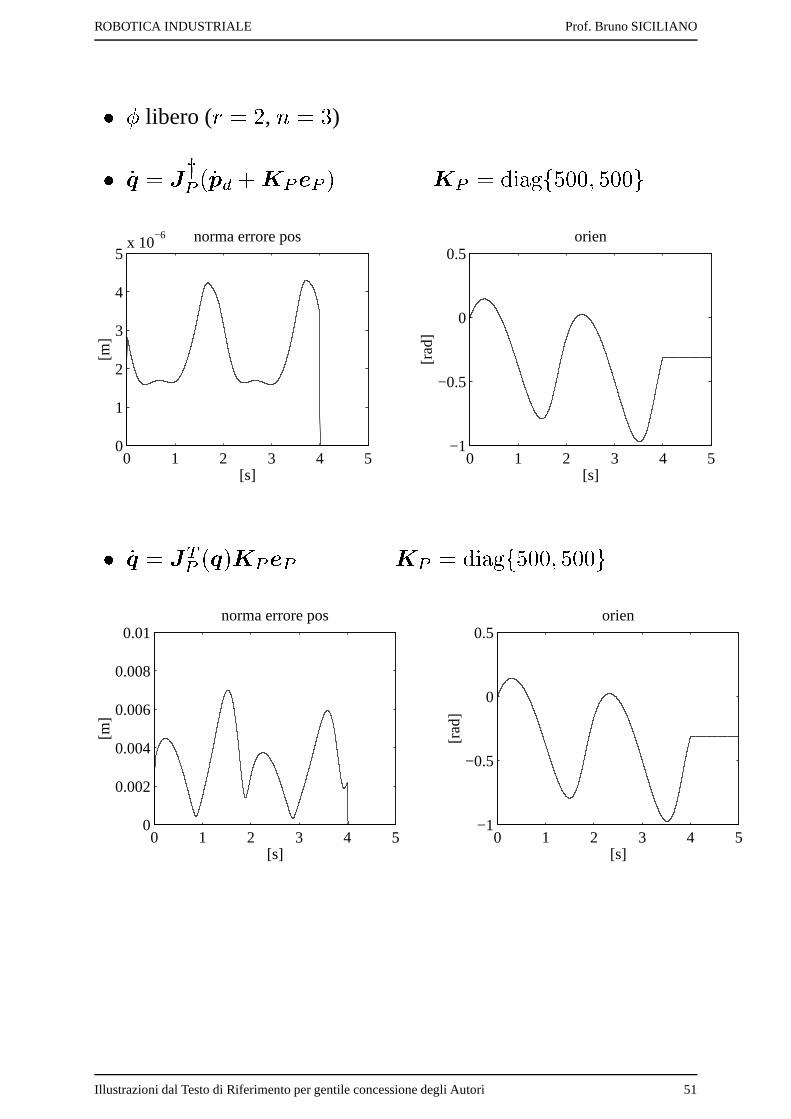
��
libero (� � �
,� ���
)
�
���� � �� � � � ��� � � � � � � � � � ����� �� ��
0 1 2 3 4 50
1
2
3
4
5x 10
−6
[s]
[m]
norma errore pos
0 1 2 3 4 5−1
−0.5
0
0.5
[s]
[rad
]
orien
�
���� � �� ����� � � � � � � � � � ����� �� ��
0 1 2 3 4 50
0.002
0.004
0.006
0.008
0.01
[s]
[m]
norma errore pos
0 1 2 3 4 5−1
−0.5
0
0.5
[s]
[rad
]
orien
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 51
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
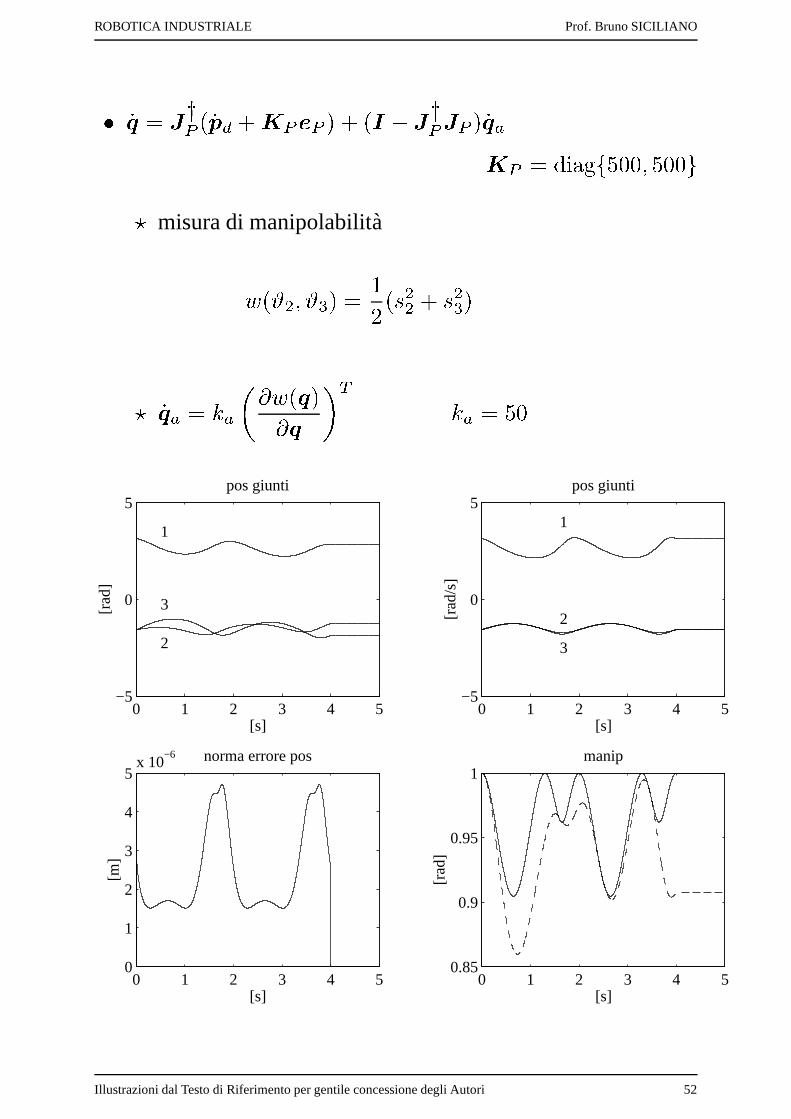
�
���� � �� � � � ��� � � � �� � � � � �� ��� � �� �� � � � � ����� �� ��
� misura di manipolabilita
� � � � � � � � � ��� � �� � � �� �
���� � � � � ��� �����
� � � � � � �
0 1 2 3 4 5−5
0
5
[s]
[rad
]
pos giunti
1
2
3
0 1 2 3 4 5−5
0
5
[s]
[rad
/s]
pos giunti
1
2
3
0 1 2 3 4 50
1
2
3
4
5x 10
−6
[s]
[m]
norma errore pos
0 1 2 3 4 50.85
0.9
0.95
1
[s]
[rad
]
manip
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 52
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
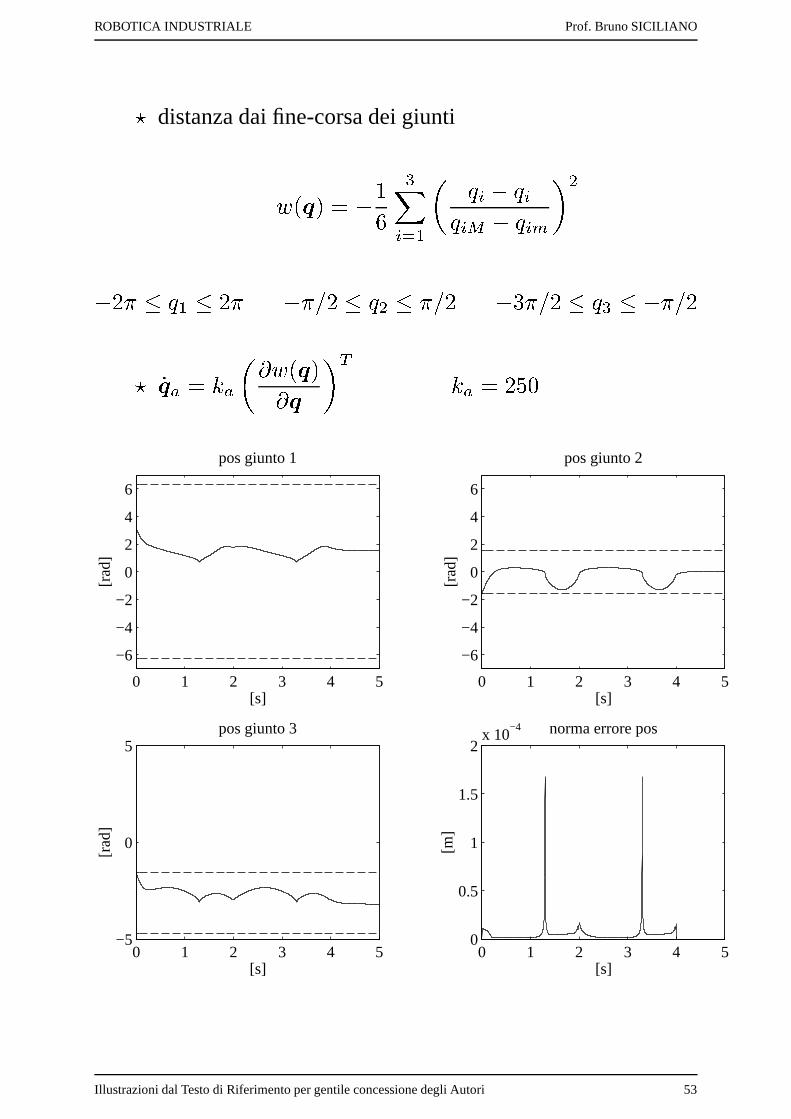
� distanza dai fine-corsa dei giunti
� ������� � ��
����� �
� � � � �� �� ��� � � �� � �
� ��� � � � �
������ � � � � �
��� � ����� � � � � �
����
���� � � � � ��� �����
� � � � � � � �
0 1 2 3 4 50
0.5
1
1.5
2x 10
−4
[s]
[m]
norma errore pos
0 1 2 3 4 5
−6
−4
−2
0
2
4
6
[s]
[rad
]
pos giunto 1
0 1 2 3 4 5
−6
−4
−2
0
2
4
6
[s]
[rad
]pos giunto 2
0 1 2 3 4 5−5
0
5
[s]
[rad
]
pos giunto 3
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 53

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
STATICA
� Relazione tra forze e momenti (forze) � all’organo terminalee forze e/o coppie (coppie) � ai giunti con il manipolatore inconfigurazione di equilibrio� lavoro elementare compiuto dalle coppie
����� � � � � �� lavoro elementare compiuto dalle forze
����� � � � � � � � � �� � � ��������� � � � � � � ����� � �� � � �%����� � �� spostamenti elementari
�spostamenti virtuali
� � � � � � � �� � � � � � �%����� � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 54
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Principio dei lavori virtuali� il manipolatore e in equilibrio statico se e solo se
� ��� � � � � � � ��
� � � � ����� �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 55
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
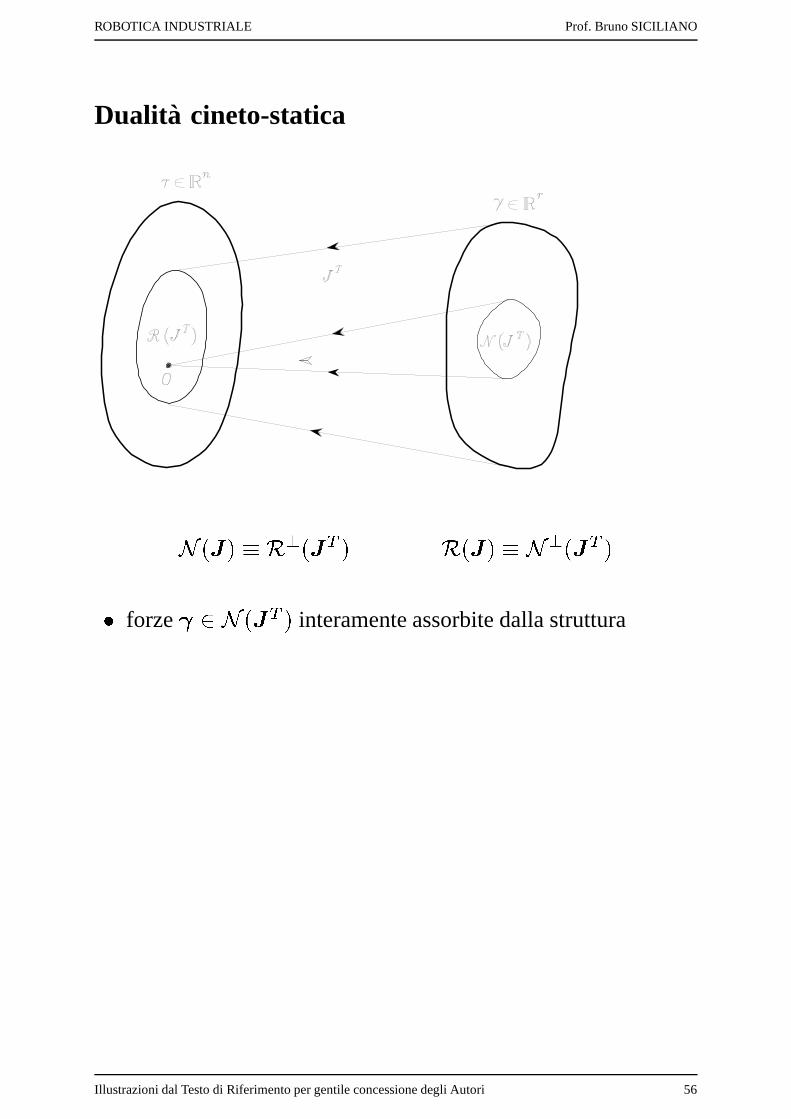
Dualita cineto-statica
� � � � � ��� � � � � � � � � � � � � � � �� forze � � � � � � �
interamente assorbite dalla struttura
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 56
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
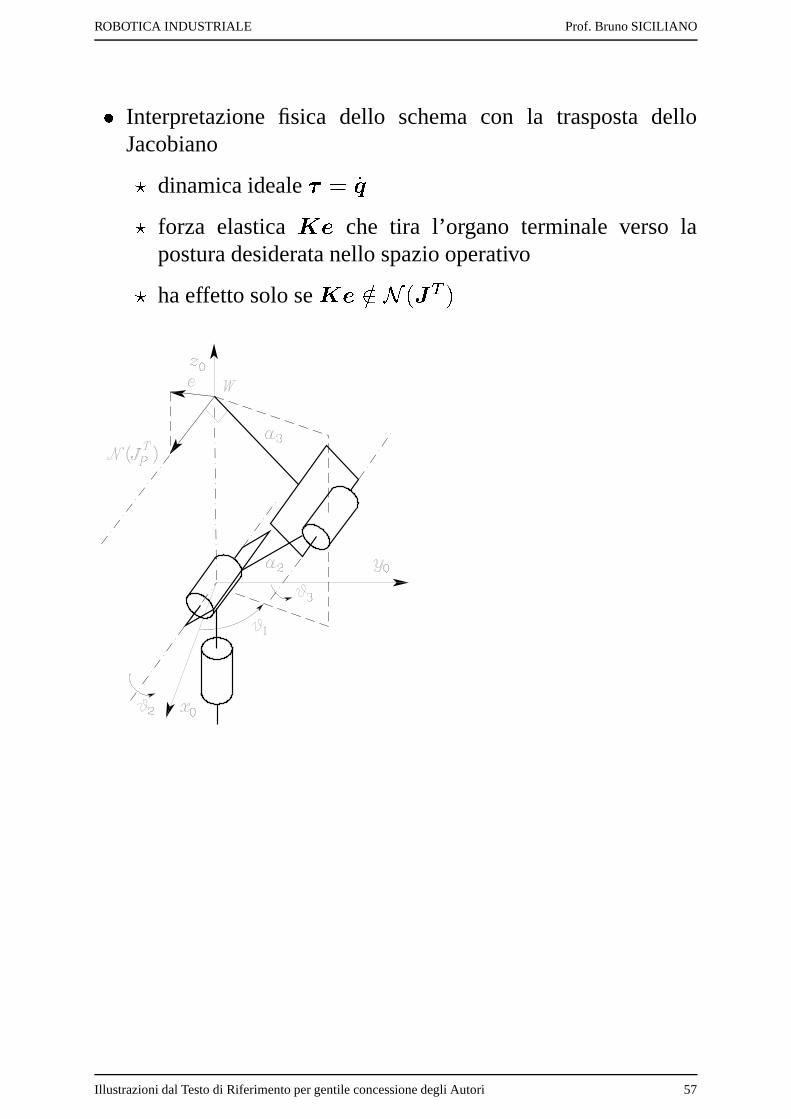
� Interpretazione fisica dello schema con la trasposta delloJacobiano� dinamica ideale � � ��� forza elastica
� � che tira l’organo terminale verso lapostura desiderata nello spazio operativo
� ha effetto solo se� � �� � � � � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 57
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
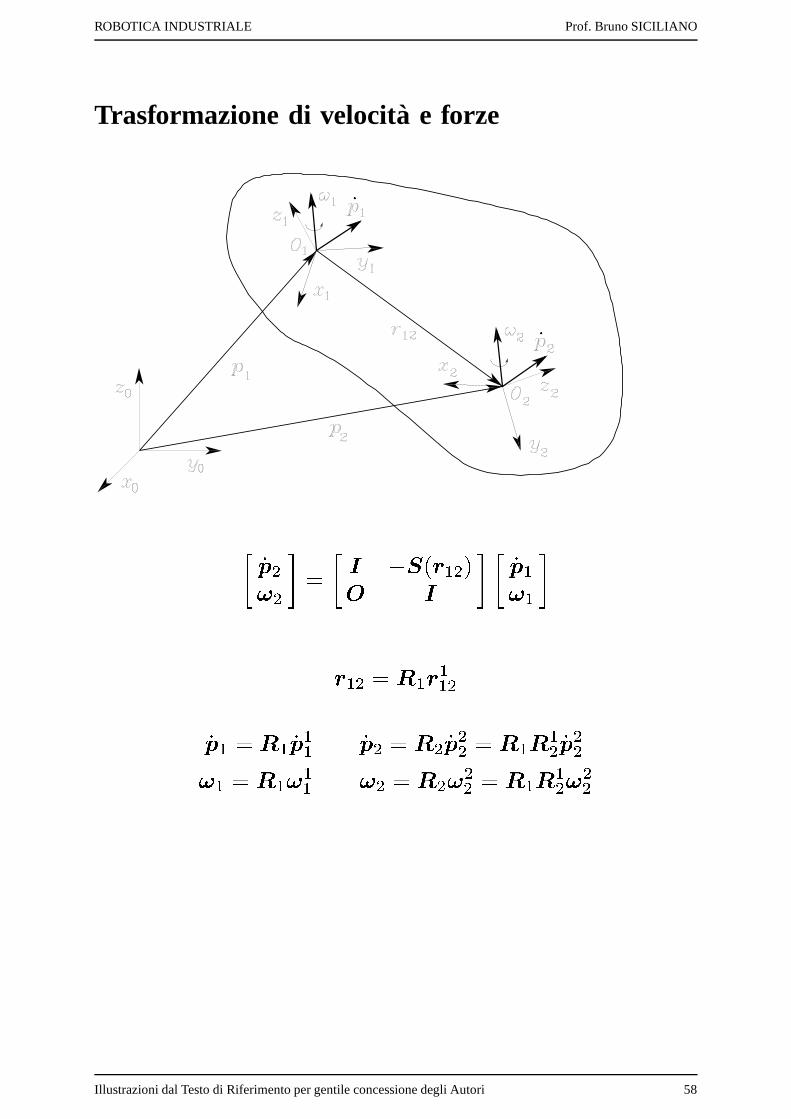
Trasformazione di velocita e forze
" � �� � # � " � � � � � � � �� � # "� �� � #
� � � � � � � �� �� � � � � � �� � � � � � � �� � � � � �� � ��� � � � � � �� � � � � � � �� � � � � �� � ��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 58

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
" � ��� �� # � " � � � � � � � � � � �� � �� � � � # "� ��� �� #! �� � � �� ! ��
� in virtu della dualita cineto-statica:
��� � � �� � � ��" � �� �� # � " � �� �
� � � �� � � � �� � �� # " � �� �� #
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 59

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
ELLISSOIDI DI MANIPOLABILITA
� Ellissoide di manipolabilita in velocita� insieme delle velocita ai giunti a norma costante���� ���� �� manipolatore ridondante�� � � � ����� !
�! � � �%����� � � ����� � � ! � �� Assi
� autovettori � � di� � � ��
direzioni� valori singolari � � � � � � � � � � � ��
dimensioni
� Volume� proporzionale a
� ����� � ����� � �%����� � � �����
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 60

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
Manipolatore planare a due bracci
� Misura di manipolabilita
� � � ����� � � ��� � � � � � � � � �
� � ���per
� � � �����
� � ���per �
� � � � (a parita di estensione � � � � � )
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 61
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
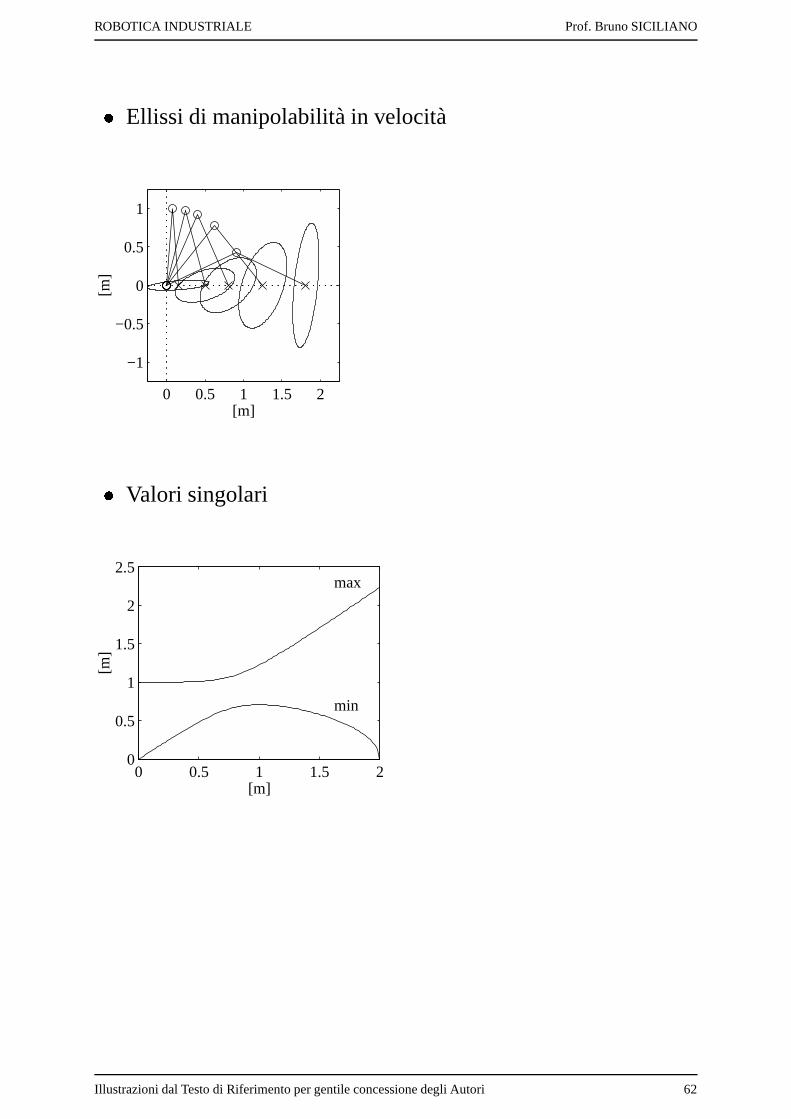
� Ellissi di manipolabilita in velocita
0 0.5 1 1.5 2
−1
−0.5
0
0.5
1
[m]
[m]
� Valori singolari
0 0.5 1 1.5 20
0.5
1
1.5
2
2.5
min
max
[m]
[m]
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 62

ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Ellissoide di manipolabilita in forza� insieme delle coppie ai giunti a norma costante
� � � � ��
� � � �%����� � � ����� � � �� Dualita cineto-statica
� una direzione lungo la quale si ha elevata manipolabilitain velocita e una direzione lungo la quale si ha scarsamanipolabilita in forza, e viceversa
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 63
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
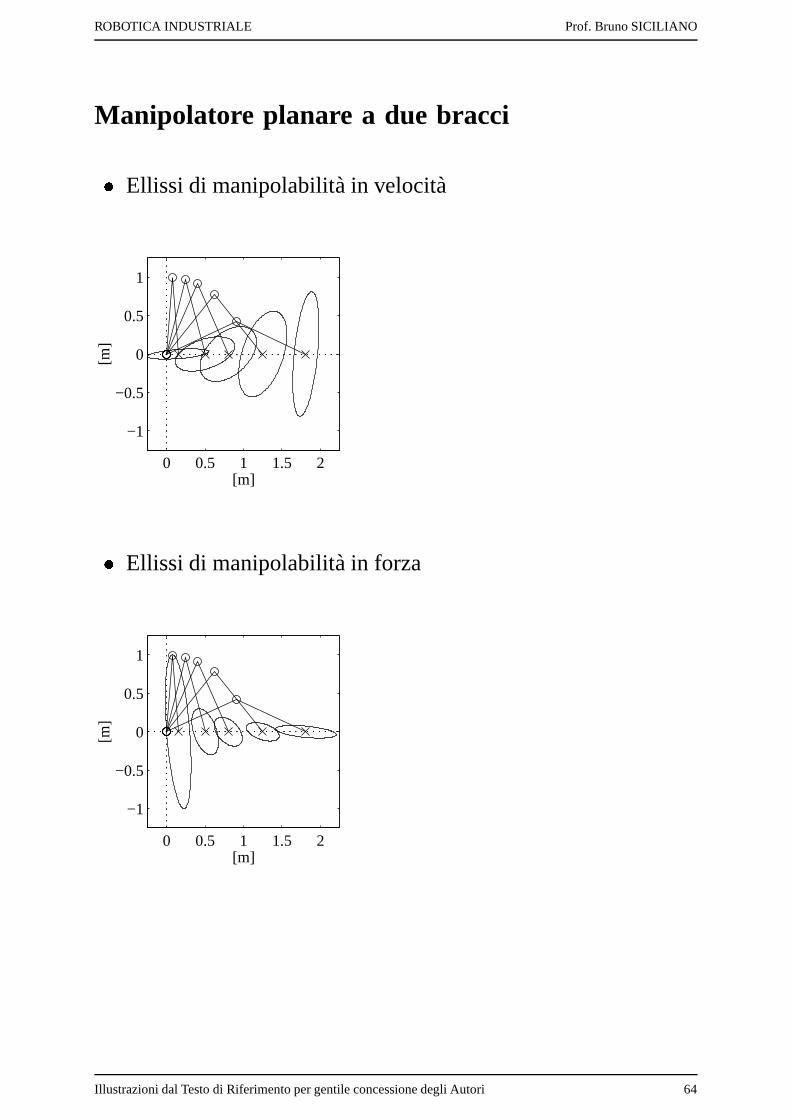
Manipolatore planare a due bracci
� Ellissi di manipolabilita in velocita
0 0.5 1 1.5 2
−1
−0.5
0
0.5
1
[m]
[m]
� Ellissi di manipolabilita in forza
0 0.5 1 1.5 2
−1
−0.5
0
0.5
1
[m]
[m]
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 64
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
� Manipolatore�
trasformatore meccanico di velocita e forzedallo spazio dei giunti allo spazio operativo� rapporto di trasformazione lungo una direzione per
l’ellissoide in forza
� ����� � �� � �%����� � � ����� � � �
��� �
� rapporto di trasformazione lungo una direzione perl’ellissoide in velocita
� ����� � �� � � �%����� � � ����� � � � � �
��� �
� utilizzazione di gradi di mobilita ridondanti
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 65
ROBOTICA INDUSTRIALE Prof. Bruno SICILIANO
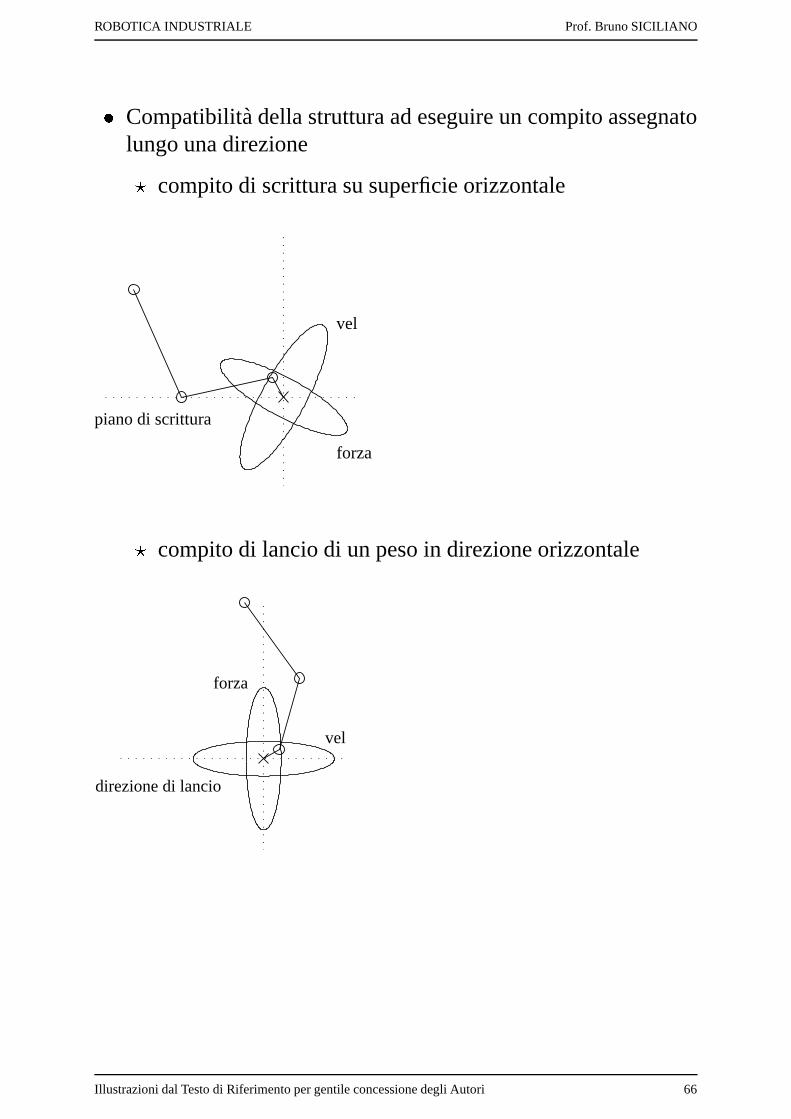
� Compatibilita della struttura ad eseguire un compito assegnatolungo una direzione� compito di scrittura su superficie orizzontale
forza
vel
piano di scrittura
� compito di lancio di un peso in direzione orizzontale
forza
vel
direzione di lancio
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 66





























