Embed Size (px)
Citation preview

TTÜ
07
RST kordamisküsimused
Marit Maris
Andrus Lauri
Juhan Gunnar
Kalle Tanel
Valdur Keio
Tiit Toivo
Erik Kaarel
Mihkel

1 | P a g e
Sisukord
Sisukord _____________________________________________________________________________________ 1
1.Süsteemiteooria põhilised mõisted: ______________________________________________________________ 2
2. Informatsioon ______________________________________________________________________________ 3
3. Shannoni valem _____________________________________________________________________________ 5
4. Juhtimine __________________________________________________________________________________ 5
5. Keerulised süsteemid. Probleemide vaatlemine süsteemidena. Süsteemne lahenemisviis. __________________ 6
6. Süsteemanalüüs ____________________________________________________________________________ 11
7 Modelleerimine. Lihtsustamise ja ratsionaalsuse printsiibid __________________________________________ 12
8. Juhusliku sündmuse tõenäosus, üksteist välistavad ja mittevälistavad sündmused. Juhuslike sündmuste täielik süsteem (täisgrupp) ___________________________________________________________________________ 12
9. Tõenäosuste kaudne arvutamine (liitmine, korrutamine) ___________________________________________ 12
12. Juhusliku suuruse arvkarakteristikud. Mõned tüüpilised jaotusseadused (ühtlane, normaalne jm.) _________ 14
13.Juhusliku vektori arvkarakteristikud. ___________________________________________________________ 15
14. Protsessid. Determineeritud protsesside klassifitseerimine ja kirjeldamisviisid. _________________________ 16
15. Polüharmoonilised ja peaaegu perioodilised protsessid ____________________________________________ 17
16. Juhuslikud protsessid ja nende karakteristikud. Statsionaarsed juhuslikud protsessid. ___________________ 17
17. Ergoodilised protsessid, spektraaltihedus, juhuslike protsesside klassifitseerimine.______________________ 19
18. Määramatud ja ebamäärased protsessid. _______________________________________________________ 20
19. Optimaalsed determineeritud süsteemid. Kumerate sihifunktsioonidega ülesanded. Vajalikud ja piisavad optimumitingimused. _________________________________________________________________________ 21
20. Funktsiooni ja keha kumeruse määrang. Nõgusate sihifunktsioonidega ülesanded. Vajalikud ja piisavad optimumitingimused. _________________________________________________________________________ 23
21. Sadulpunkt. Minimaks ülesanded. _____________________________________________________________ 23
22. Sõltuvate muutujate elimineerimise meetod. ___________________________________________________ 24
25. Mittelineaarse planeerimise Ulesannete isearasused. Gradient ja gradientmeetodid. ____________________ 26
26. Trahvifunktsioonide meetod. Lagrange`i meetod _________________________________________________ 27
29. Monte‐Carlo meetod. Juhuslike arvude tekitamine ja muundamine __________________________________ 32

2 | P a g e
1.Süsteemiteooria põhilised mõisted: a. Süsteem – on selline objekt, mis koosneb osadest (elementidest), osade vahel on teatud seosed
ja kogu objekti vaadeldakse kui tervikud. Ehk süsteem on omavahel seostatud elementide hulk, mida vaadeldakse kui tervikut. Süsteem võib olla materiaalne või abstraktne, elus või elutu, looduslik või tehissüsteem. Süsteemid on molekul, rakk, taim, inimene, perekond, riik jne. Süsteemi võib tähistada S=(A,∑), kus A on süsteemi osade hulk ja ∑ tähistab seoseid osade vahel.
b. Elemendid – operaator, sisendid, väljundid, olekuparameetrid, ülem‐ ja alamsüsteemid c. Sisendid – süsteemi sisenditeks on need süsteemi elemendid, milliseid vaadeldakse kui
algressursse, algmaterjale, lähtesuurusi, algandmeid või –põhjuseid. Sisendid on süsteemi sõltumatud muutujad. Sisendid võivad olla mittejuhitavad või juhitavad.
d. Väljundid – süsteemi väljunditeks on need elemendid, millieid vaadeldakse kui tegevuse tulemusi või tagajärgi. Väljundid n süsteemi sõltuvad muutjad.
e. Operaator – (ehk protsess, funktsioon) nimetatakse eeskirja, algoritmi, tehnoloogiat, protsessi või funktsiooni, mille põhjal süsteemi sisendite alusel saadakse süsteemi väljundid.
f. Olek – süsteem võib olla normaalolekus, häireolukorras, avariiolukorras, remondis jne). Süsteemi olekute kirjeldamiseks on võetud kasutusele olekumuutujad ehk olekuparameetrid. Üks reegel olekumuutujate valimiseks on see, et olekumuutujad tuleb valida nii, et nende fikseerimisel muutuks sisendi ja väljundi vaheline seos üks‐üheseks.
g. Käitumine – kuidas süsteem talitleb 2. Süsteemide liigitamine: Kirjanduses leidub palju erinevaid süsteemide liigitusi:
a. Füüsikalised, bioloogilised, sotsiaalsed ja immateriaalsed süsteemid b. Avatud ja suletus süsteemid c. Pideva ja diskreetaja süsteemid d. Materiaalsed ja abstraktsed süsteemid e. Juhitavad ja mitte juhitavad süsteemid
Kõige lihtsamal tasemel on võimalik süsteeme esimesel juhul liigitada staatilisteks ja dünaamilisteks süsteemideks või teisel juhul liigitada lihtsateks ja keerukateks ehk suurteks süsteemideks.
3. Süsteemide omadused: a. Süsteemi juhitavus – süsteemi olek või väljund on juhitav intervallis (t0, t1), kui leidub
selline juhtiv protsess intervallis (t0, t1), mis viib süsteemi suvalisest algolekust x(t0) soovitud lõppolekusse x(t1).
b. Süsteemi jälgitavus – süsteemi jälgitavuse all mõistetakse võimalust määrata süsteemi olekut selle väljundite jälgimise järgi. Süsteem on jälgitav ajavahemikus (t0,t1), kui süsteemi olek hetkel t0 on üheselt määratav väljundite kaudu intervallis (t0, t1).
c. Süsteemi tundlikus – süsteemi käitumisomaduste sõltuvus süsteemi parameetrite muutustest. Tagasiside võimaldab vähendada süsteemi tunglikkust teatud parameetri suhtes.

3 | P a g e
4. Süsteemi struktuur – süsteemi struktuur kirjeldab süsteemi elementide ehk osade vahelisi seoseid. See näitab, millise sisendi ja millise väljundi vahel seos on. Kuid struktuur ei näita selle seose tugevust ega tegelikku sõltuvust. Struktuure kirjeldatakse skeemide, jooniste või ühendusmaatriksite abil.
5. Süsteemi entroopia – Entroopia H(X) mõõdab juhusliku suuruse X "juhuslikkust". Mida suurem on entroopia, seda "juhuslikum" on X. Entroopiat võib ka interpreteerida kui informatsioonihulka, mida juhusliku suuruse väärtuse teadasaamine meile annab. Mida "juhuslikum" on X, seda vähem oskame me ära arvata juhusliku suuruse väärtust (juhusliku katse tulemust) ning seda enam informatsiooni selle väärtuse (katse tulemuse) teadasaamine meile annab. Esmakordselt defineeris entroopia ameerika matemaatik C. Shannon oma 1948.‐l aastal ilmunud teedrajavas artiklis "A mathematical theory of communacation".
2. Informatsioon
1. Informatsioonilised sidemed – Süsteemi üksikelementide ja erinevate süsteemide vahel
eksisteerivad, mille kaudu nad üksteist mõjutavad. Need seosed võivad energeetilised, materiaalsed (ainevahetuslikud) või informatiivsed. Viimasel juhul toimub info edastamine või vahetamine.
2. Informatsiooni liigid (vormid): a. Deterministlik informatsioon b. Tõenäosuslik informatsioon c. Määramatu informatsioon
i. Määramatu deterministlik informatsioon ii. Määramatu tõenäosuslik informatsioon
d. Ebamäärane informatsioon i. Ebamäärane deterministlik informatsioon ii. Ebamäärane tõenäosuslik info
3. Informatsiooni liikide (vormide selgitused) a. Deterministlik süsteem – Deterministlik süsteem on selline süsteem, mille kõik elemendid on
deterministlikud ja nende vahelised seosed on deterministlikud funktsioonid. Teisiti öeldes, deterministlikud süsteemid on need, mis ei sisalda mittedeterministlikke elemente ega seoseid ehk ei sisalda ühtki liiki juhuslikkust. Deterministlik element – element, mille käitumine on rangelt determineeritud. Deterministliku elemendi käitumist on võimalik täpselt ette prognoosida. Deterministlik funktsioon on sõltuvus, kus üks muutuja määrab üheselt kindlaks teise muutuja ehk funktsiooni argumendid määravad üheselt kindlaks funktsiooni väärtuse.
Seega deterministliku süsteemi puhul: väljundid on determineeritud suurused või protsessid; operaator on determineeritud funktsioon (vektorfunktsioon); sisendid on determineeritud suurused või protsessid; olekumuutujad on determineeritud suurused

4 | P a g e
või protsessid. Deterministliku süsteemi väljundeid on võimalik mineviku alusel täpselt ette ennustada. Näiteid: kellad, personaalarvutid, päikesesüsteem, täpsed automaatsüsteemid jt. Neid võib teatud tinglikkusega lugeda deterministlikeks süsteemideks.
Kuid väga rangelt deterministlikke süsteeme pole üldse olemas. b. Tõenäosuslik süsteem – Tõenäosuslik süsteem on selline stohhastiline süsteem, mille vähemalt
üks element või vähemalt üks seos elementide vahel on juhuslik, mida saab piisavalt täpselt kirjeldada tõenäosuslike karakteristikute abil ning mille kõik ülejäänud elemendid ja seosed on deterministlikud. Seega tõenäosuslik süsteem võib sisaldada deterministlikke elemente ja seoseid. Üldjuhul võivad kõik tõenäosusliku süsteemi väljundid, operaatorid, sisendid ja olekumuutujad olla tõenäosuslikult kirjeldatavad juhuslikud sündmused, suurused, protsessid või funktsioonid. Tõenäosusliku süsteemi käitumist ei ole võimalik täpselt ette prognoosida. Näiteid: täringu viskamine, elektrienergia tarbimine, energiasüsteem, tehas, riik jne. Kõiki keerukamaid süsteeme võib vaadelda tõenäosuslike süsteemidena. Kuid ranges mõttes tõenäosuslikke süsteeme leidub harva.
c. Määramatu süsteem – Määramatu süsteem on selline stohhastiline süsteem, mille vähemalt üks element või vähemalt üks seos elementide vahel on teatud intervallis määramatu ning mille kõik ülejäänud elemendid ja seosed on deterministlikud või tõenäosuslikult määratud. Määramatu süsteemi käitumist ei ole võimalik täpselt ette prognoosida ega tõenäosuslikult täpselt kirjeldada.
i. Määramatu deterministlik süsteem – Määramatu deterministlik süsteem on selline stohhastiline süsteem, mis sisaldab määramatuid deterministlikke elemente või seoseid, kuid kõik ülejäänud elemendid ja seosed on deterministlikud või tõenäosuslikud. Määramatu deterministliku süsteemi käitumist ei ole võimalik täpselt ette prognoosida ega tõenäosuslikult täpselt kirjeldada.
ii. Määramatu tõenäosuslik süsteem – Määramatu tõenäosuslik süsteem on selline stohhastiline süsteem, mis sisaldab määramatuid tõenäosuslikke elemente või seoseid, kuid kõik ülejäänud elemendid ja seosed on deterministlikud, tõenäosuslikud või määramatud deterministlikud elemendid ja seosed. Määramatu tõenäosusliku süsteemi käitumist ei ole võimalik täpselt ette prognoosida ega tõenäosuslikult täpselt kirjeldada. Näiteid: Määramatute süsteemide näideteks on keerukad stohhastilised süsteemid, mis ei ole kirjeldatavad ainult deterministlike ja tõenäosuslike karakteristikute abil.
d. Ebamäärane süsteem – Ebamäärane süsteem on selline stohhastiline süsteem, mille vähemalt üks element või vähemalt üks seos elementide vahel on ebamäärane ning mille kõik ülejäänud elemendid ja seosed on deterministlikud, tõenäosuslikud või intervallis määramatud. Ebamäärase süsteemi käitumist ei ole võimalik täpselt ette prognoosida ega tõenäosuslikult ning intervallide abil täpselt kirjeldada.
i. Ebamäärane deterministlik süsteem – Ebamäärane deterministlik süsteem on selline stohhastiline süsteem, mis sisaldab ebamääraseid deterministlikke elemente või seoseid, kuid kõik ülejäänud elemendid ja seosed on deterministlikud, tõenäosuslikud või intervallis määramatud. Ebamäärase deterministliku süsteemi käitumist ei ole

5 | P a g e
võimalik täpselt ette prognoosida ega tõenäosuslikult ja määramatuse tasandil täpselt kirjeldada.
ii. Ebamäärane tõenäosuslik süsteem – Ebamäärane tõenäosuslik süsteem on selline stohhastiline süsteem, mis sisaldab ebamääraseid tõenäosuslikke elemente või seoseid, kuid kõik ülejäänud elemendid ja seosed on deterministlikud, tõenäosuslikud, määramatud või ebamäärased deterministlikud elemendid ja seosed. Ebamäärase tõenäosusliku süsteemi käitumist ei ole võimalik täpselt ette prognoosida ega tõenäosuslikult täpselt kirjeldada. Näiteid: Ebamääraste süsteemide näideteks on keerukad stohhastilised süsteemid, mis ei ole kirjeldatavad ainult deterministlike, tõenäosuslike karakteristikute või määramatuse intervallide abil.
3. Shannoni valem
Shannoni valemit kasutatakse info hulga arvutamiseks. Kusjuures teates sisalduv keskmine info hulk bittides leitakse järgmise valmi abil:
∑=
−=n
iii xpxpXH
12 )(log)()(
Sama valmit saab kasutada ka sündmuse esialgse määramatuse ehk entroopia arvutmiseks: NH 2log0 <<
Kindlasti toimuva (p=1) sündmuse puhul H=0 ja kui kõik võimalikud variandid toimuvad sama
tõenäosusega, siis on H maksimaalne. max2log)( HNXH == .
4. Juhtimine
Juhtimine on üldmõiste.
Juhtimine – ühe objekti (süsteemi) sihipärane mõjutamine teise objekti (süsteemi) poolt.
Alati peab olema kaks komponenti: juhitav süsteem + juhtiv süsteem, need kokku on juhtimissüsteem.
Kui juhtiv süsteem mõjutab juhitavat süsteemi, siis on tegemist juhttoime või otsesidega, vastupidisel juhul on tegu tagasisidega.
Juhtimisülesanne on määratud, kui on teada:
1. eesmärk, 2. juhitavad faktorid, 3. lisatingimused ja 4. mittejuhitavad faktorid.

6 | P a g e
Juhtimisülesanneteks on kõige sagedamini planeerimine, organiseerimine, eestvedamine, kontrollimine, objekti stabiliseerimine, etteantud programmi täitmine, optimeerimine jne.
Kui on tegu optimeerimisega (minimeerimine, maksimeerimine), siis sellist juhtimist nimetatakse optimaaljuhtimiseks.
Juhtimisprotsess koosneb:
1. info kogumine ja töötlemine, 2. otsuse vastuvõtmine, 3. otsuse elluviimine, 4. tagasiside
Mittedetermineeritud objektide juhtimine on võimalik ainult tänu tagasisidele.
Juhtimine võib olla:
o deterministlik, o mittedeterministlik ehk stohhastiline ja o adaptiivne.
Juhtimissüsteemid võivad olla:
o tsentraalsed o detsentraalsed o jaotatud funktsioonidega
Süsteemi juhitavus – intervallis (t0, t1) on olemas selline funktsioon, mis viib süsteemi suvalisest algolekust x(t0) soovitud lõppolekusse x(t1).
Süsteemi jälgitavus – süsteemi olekut on võimalik üheselt määrata tema väljundite jälgimise kaudu.
Süsteemi tundlikkus – süsteemi käitumisomaduste sõltuvus süsteemi parameetrite muutusest. Tagasiside vähendab tundlikkust.
Hierarhiline süsteem – ühed süsteemid on teistele (alamsüsteemidele) ülemsüsteemideks. On alluvussuhted või ühed süsteemid kuuluvad teistesse. Neid süsteeme kasutatakse organisatsioonide juhtimisel (nt sõjavägi, ülikool, energeetika). Nende kasutamine võimaldab lihtsustada süsteemide modelleerimist, analüüsi, juhtimist ja sünteesi.
5. Keerulised süsteemid. Probleemide vaatlemine süsteemidena. Süsteemne lahenemisviis.
Keerulisel süsteemil on:
1. suur elementide arv,
2. keerukad seosed elementide vahel,

7 | P a g e
3. hierarhiline struktuur,
4. juhuslike faktorite suur mõju,
5. süsteem on isekohanev või sisaldab küberneetilisi süsteeme.
Keerulisteks süsteemideks on energiasüsteem, riigi majandus, suur firma jne.
Üksikkomponentide käitumine pole alati individuaalselt modelleeritud (või isegi mõistetav).
Keerulised süsteemid lammutatakse väiksemateks komponentideks kuni iga komponent on piisavalt lihtne selleks, et ta funktsioon on lihtsalt modelleeritav (ja arusaadav).
Keerulised koosnevad allsüsteemidest ülemsüsteemidest. Süsteeme kus ühed süsteemid on teistele ülemsüsteemideks, nimetatakse hierarhilisteks süsteemideks.
Hierarhilistes süsteemides kehtivad alluvussuhted all ja ülemsüsteemide vahel või ühed süsteemid on teistest üldisemad, hõlmates ka vastavaid allsüsteeme:
AA ⊂1 ja AA ⊂2
või
AAAA ⊂⊂⊂ 321 jne.
Hierarhilisi süsteeme kasutatakse organisatsioonide juhtimisel. Ranged hierarhilised süsteemid on kasutusel sõjaväes. Kuid hierarhilisi süsteeme võib kasutada ka õppetöös ja teadustöös. Laialdane huvi hierarhiliste süsteemide vastu on seletatav sellega, et süsteemide vaatlemine hierarhiliste süsteemidena ja hierarhiliste süsteemide loomine võimaldab lihtsustada süsteemide modelleerimist, analüüsi, juhtimist ja sünteesi. Seepärast on hierarhilised süsteemid muutunud väga aktuaalseks. Palju hierarhilisi süsteeme on energeetikas.
A B
Joonis 1.8. Hierarhilised süsteemid
Probleemide vaatlemine süsteemina

8 | P a g e
Süsteemide kirjeldamiseks kasutatav keel sobib hästi ka probleemide kirjeldamiseks. Maailmas on lõpmata palju erinevaid probleeme ehk ülesandeid. Süsteemiteooria põhimõistete abil on neid võimalik liigitada ja kirjeldada.
Kasutades süsteemide kirjeldamise 3 komponenti (sisend, väljund ja operaator), saame järgmise ülesannete liigituse.
1. Väljundi leidmise ülesanded
On antud U ja F. Leida Y!
Sellesse klassi kuuluvad tavalised arvutusülesanded, tootmise korraldamine jm. mingi toimingu teostamise ülesanded.
2. Operaatori leidmise ülesanded
On antud U ja Y. Leida F!
Siia kuuluvad ülesanded, kus on antud ressursid või lähteandmed ja on teada tulemused, mida soovime saavutada. Leida tuleb operaator, tehnoloogia või meetod kuidas antud tulemust saada. Kui sisendid ja väljundite kohta on kogutud infot, tuleb leida seos, kuidas väljundid sõltuvad sisenditest. Teisiti öeldes, tuleb objekt ehk selle operaator identifitseerida. Seepärast nimetatakse antud ülesannete klassi identifitseerimise ülesanneteks.
3. Sisendi leidmise ülesanded
On antud F ja Y. Leida U!

9 | P a g e
Selliste ülesannete puhul tuleb leida algpõhjus või viga, miks on süsteemil sellised väljundid. Selle klassi ülesandeid nim. diagnostikaülesanneteks.
4. Operaatori ja väljundi leidmise ülesanded
On antud ainult sisendid. Leida F ja Y!
On antud mingi materjal, mingid andmed või mingi seade. Kuidas seda kasutada ja mida sellega toota? Selliste ülesannete lahendamisel on suur osa loomingul.
5. Sisendi ja väljundi leidmise ülesanded
On antud süsteemi operaator F. Leida U ja Y!
Need on loomingulised ülesanded. On antud mingi tehnoloogia, masin, andmebaas, spetsialist või muu ja probleem on selles, milleks neid kasutada? Mida ja millest oleks otstarbekas toota?
6. Sisendi ja operaatori leidmise ülesanded
On antud väljund Y. Leida U ja F!
On teada milliseid tulemusi soovime saada. Probleem on selles kuidas soovitud tulemusi saada? Suurt rolli nendes ülesannetes mängib looming.
7. Puhtalt loomingulised ülesanded

10 | P a g e
Midagi pole antud. Leida U, F ja Y!
Sellised on suure vabadusega puhtloomingulised ülesanded.
8. Revisjoniülesanded
Kõik on antud. Midagi pole vaja leida, kuid kõike on tarvis kontrollida.
Esitatud 8 ülesannete klassi moodustavad täisgrupi. Rohkem ülesannete klasse ei saa olla.
Süsteemne lähenemisviis
Süsteemanalüüsi aluseks on süsteemne lähenemisviis. Viimase all mõeldakse keerukate süsteemide kompleksse analüüsi metodoloogiat.
Probleemide lahendamise üldine skeem on järgmine:
1. ülesande otstarbekohane püstitamine
2. matemaatilise mudeli koostamine ja selle adekvaatsuse kontroll
3. lahendi leidmine mudelil
4. lahendi sobivuse kontroll
5. lahendi realiseerimine (elluviimine).
Seejuures tuleb tähelepanu pöörata järgmistele aspektidele:

11 | P a g e
1. Püstitage ülesanne õigesti
Valesti püstitatud ülesande alusel ei ole võimalik saada õiget tulemust. Ülesande püstitamisel leidke vastused järgmistele küsimustele: Mis on eesmärgiks? Mis on otsitavateks? Mis on antud? Millised on ülesande tingimused?
2. Probleemi tuleb vaadelda ja analüüsida kui süsteemi
Arvestada tuleb kõiki olulisi faktoreid.
3. Ülesande püstitamisel ja lahendamisel tuleb arvestada info mittetäielikkust.
4. Tuleb uurida optimeerimise võimalusi ja kui võimalik püstitada optimeerimisülesanne
5. Kui probleem on liiga keeruline, tuleb see jagada osadeks ja moodustada alamülesannetest hierarhiline süsteem
6. Kasutada deduktiivset lähenemisviisi (üldiselt üksikule).
7. Kasutada matemaatikat.
Koostada matemaatiline mudel, kontrollida mudeli sobivust ja uurida probleemi mudeli abil.
8. Probleemi lahendamisel püüda lihtsuse ja fundamentaalsuse poole.
Kontrollida kõiki võimalikke lahendeid ja valida neist parim.
Vajaduse korral tuleb probleemi lahendamist uuesti algusest alustada.
Süsteemanalüüs, baseerudes teaduslikul lähenemisviisil, tõstab oluliselt inimese mõtlemisvõimet ja probleemide lahendamise oskusi.
6. Süsteemanalüüs
Eesmärk
Süsteemanalüüsi eesmärgiks on probleemide õige püstitamine, analüüs ja nende optimaalne lahendamine, süsteemide efektiivsuse analüüs ning efektiivsete süsteemide süntees.
Süsteemanalüüs on kunst anda halbu vastuseid nendele küsimustele, millele muul moel antakse veelgi halvemaid vastuseid.
Süsteemne lähenemisviis
Süsteemanalüüsi aluseks on süsteemne lähenemisviis. Viimase all mõeldakse keerukate süsteemide kompleksse analüüsi metodoloogiat.
Siia alla vt ka ülevalt probleemide lahendamine.

12 | P a g e
7 Modelleerimine. Lihtsustamise ja ratsionaalsuse printsiibid
Modelleerimine põhineb süsteemide või objektide sarnasusel, kusjuures objekti ja mudeli sarnasust hinnatakse kindlate kriteeriumide järgi. Originaali ja mudeli sarnasust tähistatakse A ~ B. Kuna sarnasus on vastastikune, siis ka B ~ A.
Lähtesüsteemist A lihtustamise teel saadud süsteemi B nimetatakse süsteemi A homomorfeks ehk lihtsustatud mudeliks. Originaali A ja mudeli B vahelised suhted ei ole pööratavad.
Kaks süsteemi on isomorfsed, kui neil on ühesugused sisendid ja väljundid ning nad reageerivad välistoimetele ühtemoodi.
Deterministlik süsteemimudel: sisendid, väljundid ja olekumuutujad on determineeritud suurused või protsessid. Süsteemimudelid võivad olla staatilised (ajas muutumatud) või dünaamilised (sisendid, väljundid ja olekumuutujad on üldjuhul ajast sõltuvad protsessid).
8. Juhusliku sündmuse tõenäosus, üksteist välistavad ja mittevälistavad sündmused. Juhuslike sündmuste täielik süsteem (täisgrupp)
Juhuslikud on need sündmused, mis katse tulemusena võivad toimuda või mitte toimuda. Juhusliku sündmuse toimumist iseloomustatakse sündmuse toimumise tõenäosusega P(A). Ühe katse puhul on sündmuse tõenäosus selle sündmuse toimumise ja katsete arvu suhte piirväärtus.
Üksteist välistavate sündmuste A ja B korral ei saa sündmused A ja B toimuda samaaegselt. Üksteist välistavate sündmuste hulka, millest üks sündmus võib katse tulemusena toimuda, nimetatakse elementaarsündmuste ruumiks.
Üksteist mittevälistavad sündmused võivad toimuda samaaegselt. Ehk teisiti, sündmusi A ja B nimetatakse mittevälistavateks, kui leiduvad elementaarsündmused, mis kuuluvad üheaegselt nii sündmusele A kui ka sündmusele B.
Üksteist välistavate sündmuste süsteemi nimetatakse täisgrupiks (täielikuks süsteemiks), kui katse tulemusel toimub tingimata üks ja ainult üks nendest sündmustest.
9. Tõenäosuste kaudne arvutamine (liitmine, korrutamine)
Sündmuste summa A∪B on sündmus, mis toimub siis, kui toimub sündmus A või sündmus B.

13 | P a g e
Kahe teineteist välistava sündmuse A ja B summa tõenäosus on võrdne nende sündmuste tõenäosuste summaga
P(A∪B)=P(A)+P(B)
Kahe mittevälistava sündmuse summa tõenöosus on võrdne nende sündmuste summa ja sündmuste korrutise tõenäosuste vahega
P(A∪B)=P(A)+P(B)‐P(A∩B)
Sündmuste korrutis A∩B on sündmus, mis toimub siis kui toimuvad sündmused A ja B.
Kahe sündmuse korrutise tõenäosus on võrne ühe sündmuse tõenäosuse ja teise sündmuse tingliku tõenäosuse korrutisega
P(A∩B)=P(A)*P(B/A)=P(B)*P(A/B)
Kui A ja B on sõltumatu sündmused, siis P(A∩B)=P(A)*P(B)

14 | P a g e
12. Juhusliku suuruse arvkarakteristikud. Mõned tüüpilised jaotusseadused (ühtlane, normaalne jm.)
Juhusliku suuruse osaliseks kirjeldamiseks on kasutusele võetud mitmeid jaotusseadust iseloomustavaid arvkarakteristikuid.
Keskväärtus (matemaatiline ootus)
Juhusliku suuruse keskväärtus ehk matemaatiline ootus on juhusliku suuruse tähtsaim arvkarakteristik, mis näitab juhusliku suuruse kaalutud keskmist
Diskreetse juhusliku suuruse keskväärtus:
∑=
⋅=n
iii pxEX
1 (4.19)
Pideva juhusliku suuruse keskväärtus:
∫∞
∞−
⋅= dxxfxEX )( (4.20)
Dispersioon ja standardhälve
Juhusliku suuruse iseloomustamiseks ei piisa ainult keskväärtusest. Tähtsuselt järgmisteks karakteristikuteks on dispersioon ja standardhälve. Need iseloomustavad juhusliku suuruse hajuvust keskväärtuse ümber.
Dispersiooniks nimetatakse juhusliku suuruse hälvete ruutude keskmist keskväärtusest:
2)( EXXEDX −= (4.21)
Diskreetse juhusliku suuruse dispersioon:
∑=
⋅−=n
iii pEXxDX
1
2)( (4.22)
Pideva juhusliku suuruse dispersioon:
∫∞
∞−
−= dxxfEXxDX )()( 2 . (4.23)
Kasutatakse ka mitmeid teisi arvkarakteristikuid: mood, mediaan asümmeetria tegur, ekstsess jne.
Standardhälve on ruutjuur dispersioonist:
DXx =σ . (4.24)

15 | P a g e
Normaaljaotus
∫∞
∞−
−−= dxEXxxf )
2)(exp(
21)( 2
2
σπσ. (4.25)
Normaaljaotus on määratud kahe arvkarakteristikuga – keskväärtusega ja standardhälve ehk dispersiooniga. Normaaljaotus on piirjaotusseadus. Seepärast on ta väga laialt levinud.
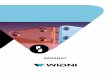
Joonis 4.5. Normaaljaotuse jaotusfunktsioon Joonis 4.6. Normaaljaotuse jaotustihedus
13.Juhusliku vektori arvkarakteristikud.
Kahemõõtmelise juhusliku vektori uurimisel on oluline tähtsus korrelatsioonimomendil ehk kovariatsioonil, mis iseloomustab ligikaudu juhuslike suuruste vahelist sõltuvust. Kovariatsiooniks ehk korrelatsioonimomendiks nimetatakse järgmist keskmist:
))()((),cov( EYYEXXEYX −⋅−= (4.30)
Seega kovariatsioon on kahe juhusliku suuruse hälvete korrutise keskmine. Kovariatsioon iseloomustab mitte ainult sõltuvuse olemasolu, vaid ka sõltuvuse intensiivsust.
Sõltuvuse mõju tugevuse hindamiseks kasutatakse dimensioonita suhet:
yxxy
YXrσσ
),cov(= ,
(4.31)
mida nimetatakse korrelatsioonikordajaks.
Sõltumatute juhuslike suuruste X ja Y kovariatsioon ja korrelatsioonikordaja on võrdsed nulliga.
Juhuslike suuruste vahelist sõltuvust iseloomustatakse ka regressioonivõrrandite või regressioonifunktsiooniga:
)(xmy x= (4.32)
Regressioonifunktsioon näitab Y keskväärtuse sõltuvust suuruse x väärtustest.
Normaaljaotuse jaotusfunktsioon
00,10,20,30,40,50,60,70,80,9
1
-3 -2,7 -2,3 -2 -1,6 -1,3 -0,9 -0,6 -0,2 0,15 0,5 0,85 1,2 1,55 1,9 2,25 2,6 2,95
Standardiseeritud normaaljaotuse tihedusfunktsioon
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
-3 -2,7 -2,3 -2 -1,6 -1,3 -0,9 -0,6 -0,2 0,15 0,5 0,85 1,2 1,55 1,9 2,25 2,6 2,95
F(X)f( )
XX

16 | P a g e
14. Protsessid. Determineeritud protsesside klassifitseerimine ja kirjeldamisviisid.
Protsessiks nimetatakse objekti (sündmuse, suuruse, funktsiooni, vektori, süsteemi või muu) muutumist aja või mõne muu parameetri järgi. Tavaliselt on protsessi puhul muutujaks aeg: )(tx .
Protsessi minevikku nimetatakse realisatsiooniks ja tulevikku – prognoosiks.
Informatsiooni protsessi mineviku kohta nimetatakse aposterioorseks ehk retrospektiivseks infoks ja tuleviku kohta ka aprioorseks infoks.
Protsesside liigid:
o pideva aja ja pideva väärtusega protsessid
o pideva aja ja diskreetse väärtusega protsessid
o diskreetse aja ja pideva väärtusega protsessid
o diskreetse aja ja diskreetse väärtusega protsessid.
Näiteid:
Pideva aja ja pideva väärtusega protsessid: taevakehade liikumine, elektri tarbimine (kuid see ei ole deterministlik protsess).
Pideva aja diskreetse väärtusega protsessid: signaalide edastamine sidekanalis kahendsüsteemis.
Diskreetse aja ja pideva väärtusega protsessid: õhutemperatuuri muutumine täistundidel, kõik väärtuse järgi pidevad protsessid kui neid registreeritakse teatud ajaintervallide (tunni, ööpäeva, kuu jne) järel
Diskreetse aja ja diskreetse väärtusega protsessid: eksami tulemused, kui igat üliõpilast eksamineeritakse täpselt 15 min.
Determineeritud protsessiks nimetatakse sellist protsessi, mille tulevikku on võimalik täpselt ette prognoosida, kui on teada selle protsessi piisavalt pikk realisatsioon. See on protsess, mille tulevik on ette määratud. D‐protsessid on: maakera pöörlemine, täpsed kellad jm.
Determineeritud protsessid jaotatakse kahte gruppi:
perioodilised protsessid
mitteperioodilised protsessid.
Determineeritud protsessi x(t) nimetatakse perioodiliseks protsessiks, kui mingi ajaperioodi T järel selle protsessi väärtused korduvad:
)()( nTtxtx ±= , n=1, 2, 3, … (3.6)
Protsessi, mille puhul ei leidu sellist ajaperioodi T, mille puhul kehtib võrdus (3.6), nimetatakse mitteperioodiliseks.
Ajaperioodi T nimetatakse protsessi perioodiks ja tsüklite arvu ajaühikus – sageduseks. Sageduse f ja perioodi T puhul kehtib järgmine seos:

17 | P a g e
Tf 1= . (3.7)
Perioodilised protsessid võivad olla 2 liiki:
o harmoonilised protsessid
o polüharmoonilised protsessid.
15. Polüharmoonilised ja peaaegu perioodilised protsessid
Polüharmoonilisteks protsessideks nimetatakse selliseid protsesse, mis on küll perioodilised, aga mis ei ole harmoonilised.
Selliseid protsesse saab kirjeldada Fourier’ rea abil.
[ ]∑∞
=
++=1
000 )2sin()2cos(
2)(
nnn tnfbtnfa
atx ππ
Kõikide harmooniliste sagedused on mingid põhisageduse kordsed.
Polüharmoonilise protsessi näiteks on muusikalised helid. Neis on põhiharmooniline, mis määrab heli kõrguse ja kõrgemad harmoonilised, mis annavad helile tämbri.
Polüharmoonilise protsessi spektrit iseloomustab amplituudi ja sageduse karakteristik.
Peaaegu perioodiliseks nimetatakse sellist protsessi, mis ei ole perioodiline, aga mida saab ikkagi kirjeldada kui perioodilist protsessi.
∑∞
=
Θ+=1
)2sin()(n
nn tnfXtx π
Nt: )50sin()2sin()2sin()( 321 tXtXtXtx ++=
Erinevus perioodiliste protsessidega seisneb selles, et antud juhul võib siinuse argument olla irratsionaalarv.
Ratsionaalarv on arv, mille saab esitada kujul a/b, kus a ja b on täisarvud ning b ei võrdu nulliga.
Irratsionaalarv on reaalarv, mis pole ratsionaalarv.
Reaalarv – arv, mida saab esitada lõpliku või lõpmatu kümnendmurruna.
16. Juhuslikud protsessid ja nende karakteristikud. Statsionaarsed juhuslikud protsessid.

18 | P a g e
Juhusikuks protsessiks nimetatakse protsessi, mille väärtus argumendi iga väärtuse korral on juhuslik suurus. See on protsess, mille kulgu ei ole võimalik täpselt ette prognoosida. Apriori on võimalik teada ainult juhusliku protsessi võimalike väärtuste piirkonda ja protsessi tõenäosuslikke karakteristikuid. Juhuslik protsess kulgeb iga kord isemoodi.
Selleks, et arvestada protsessi väärtuste sõltuvusi erinevatel ajahetkedel, ei piisa ühemõõtmelistest jaotusseadustest. Kasutusele tuleb võtta mitmemõõtmelised jaotusseadused.
Juhusliku protsessi n‐mõõtmelised jaotusseadusfunktsioon (näitab tõenäosust, millega juhuslik protsess hetkel t1 võtab väiksema väärtuse kui x1 ja hetkel t2 väiksema väärtuse kui x2 jne)
Fn(x1;t1;…;xn;tn)=P((X(t1)<x1)∩…∩(X(tn)<xn))
ja jaotustihedus (n järku jaotusfunktsiooni n järku segatuletis)
fn(x1;t1;…;xn;tn)=δnFn(x1;t1;…;xn;tn)/δx1…δxn
Sageli pole vaja juhuslikke protsesse kirjeldada mitmemõõtmeliste jaotusseaduste tasemel, piisab mitmesugustest arvkarakteristikutest, nagu näiteks:
Juhusliku protsessi keskväärtus (matemaatiline ootus) EX(t)=∞‐∞∫x*f(x;t)dx
Juhusliku protsessi dispersioon DX(t)= ∞‐∞∫(x‐EX(t))2*f(x;t)dx
Juhusliku protsessi kovariatsioonifunktsioon
Kx(t1;t2)=E[(X(t1)‐EX(t1))(X(t2)‐EX(t2))]
Juhusliku protsessi korrelatsioonifunktsioon
Rx(t1;t2)= Kx(t1;t2)/σ1(t1)*σ2(t1)
Juhuslikku protsessi nimetatakse statsionaarseks, kui selle keskväärtus on konstante EX(t)=const, dispersioon on konstantne DX(t)=const ning kvariatsioonifunktsioon sõltub ainult argumentide vahest Kx(t1;t2)= kx(τ)
Kehtivad järgmised võrdused

19 | P a g e
o Statsionaarse juhusliku protsessi dispersioon on konstantne ja võrdub kovariatsioonifunktsiooni väärtusega punktis τ=0; kx(0)=DX(t)
o Statsionaarse juhusliku protsessi kovariatsioonifunktsioon on paarisfunktsioon; kx(‐τ)=kx(τ)
o ⎢kx(τ)⎢≤kx(0)
17. Ergoodilised protsessid, spektraaltihedus, juhuslike protsesside klassifitseerimine.
Enamikul statsionaarsetel juhuslikel protsessidel on praktika seisukohast tähtis omadus, mida nimetatakse ergoodilisuse omaduseks ja mis seisneb selles, et küllalt pika ühe realisatsiooni järgi on võimalik määrata kõik statsionaarse juhusliku protsessi tõenäosuslikud karakteristikud. Teiste sõnadega, ergoodilisuse omadus tähendab seda, et statsionaarse juhusliku protsessi faasikeskmised võrduvad ajakeskmisega:
∫ ∫∞
∞− −=⋅=
T
dttxTT
dxtxfxtEX )(2
1lim),()( .
Juhusliku protsessi sageduslikuks kirjeldamiseks kasutatakse spektraaltihedust.
Statsionaarse juhusliku protsessi spektraaltiheduseks nimetatakse funktsiooni S, mis määrab protsessi harmoonikute dispersiooni jaotustiheduse sõltuvalt sagedusest:
∫= τωττπ
ω dkS XX )cos()(1)(
Spektraaltiheduse integraal võrdub dispersiooniga:
∫∞
=0
)( ωω dSD XX .
Spektraaltiheduse graafik
Praktikas kasutatakse spektraalt‐e asemel normeeritud spektraaltihedust: X
XX D
S )()(
ωωσ =
Tõenäosuslikud juhuslikud protsessid on statsionaarsed või mittestatsionaarsed.

20 | P a g e
Järelmõju järgi liigitatakse juhuslikke protsesse järgmiselt:
sõltumatu juurdekasvuga juhuslikud protsessid – protsessid, milliseid saab adekvaatselt kirjeldada ühemõõtmeliste jaotusseaduste abil
lihtsad Markovi protsessid – protsessid, milliseid saab ammendavalt kirjeldada kahemõõtmeliste jaotusseaduste abil
keerukad Markovi protsessid ‐ protsessid, milliseid saab ammendavalt kirjeldada n‐mõõtmeliste jaotusseaduste abil (n>2)
eriti keeruka järelmõjuga protsessid – protsessid, milliseid on võimalik ammendavalt kirjeldada ainult lõpmatumõõtmeliste jaotusseaduste abil.
18. Määramatud ja ebamäärased protsessid.
Intervallis määramatud juhuslikud protsessid on sellised juhuslikud protsessid, mille tõenäosuslike karakteristikute kohta on teada ainult nende võimalike väärtuste intervallid või pole tõenäosuslikke karakteristikuid üldse teada.
Näiteks, kui jaotusseadus ei ole teada, siis võib ette anda kõige halvema või kõige kahjulikuma jaotusseaduse. Kõige suurema entroopiaga on ühtlane jaotusseadus.
Tavaliselt on teada ainult keskväärtuse ja dispersiooni (standardhälve) intervallid:
)()()( tXtEXtX +− ≤≤
)()()( ttDt XXX+− ≤≤ σσ .
Väärtused asuvad etteantud vahemikes.
Ebamäärased protsessid on sellised juhuslikud protsessid, mille võimalike väärtuste ruum on ebamäärane ja/või info protsessi tõenäosuslike karakteristikute kohta on ebamäärane. Seejuures võib juhuslik protsess sisaldada deterministlikke, tõenäosuslikke ja määramatuid komponente.
Näiteid.
1. Ebamäärane protsessi väärtuste ruum:
)(~)( tAtX ∈ , (4.58)
kus
},(,{)(~ txAtA μ= ‐ ebamäärane ruum.

21 | P a g e
ebamäärane protsess
2. Ebamäärase protsessi keskväärtus
Protsessi keskväärtuse kohta on teada kuuluvusfunktsioon:
)},(,{)(~ tEXBtB EXEXEX μ=
Ebamäärase protsessi keskväärtus
19. Optimaalsed determineeritud süsteemid. Kumerate sihifunktsioonidega ülesanded. Vajalikud ja piisavad optimumitingimused.
Optimaalse süsteemi all mõistetakse süsteemi, mis toimib ja areneb teatud kriteeriumi või kriteeriumide ja lisatingimuste suhtes optimaalselt või mille struktuur on optimaalne. Optimaalne süsteem on ideaal, mille poole tuleb püüda, kuid mida alati ei saavutata.
Deterministlik süsteem on selline süsteem, mille kõik elemendid on deterministlikud ja nende vahelised seosed on deterministlikud funktsioonid. Teisiti öeldes, deterministlikud süsteemid on need, mis ei sisalda mittedeterministlikke elemente ega seoseid ehk ei sisalda ühtki liiki juhuslikkust.
Deterministlik element – element, mille käitumine on rangelt determineeritud. Deterministliku elemendi käitumist on võimalik täpselt ette prognoosida.
Deterministlik funktsioon on sõltuvus, kus üks muutuja määrab üheselt kindlaks teise muutuja ehk funktsiooni argumendid määravad üheselt kindlaks funktsiooni väärtuse.
Seega deterministliku süsteemi puhul:
o väljundid on determineeritud suurused või protsessid
o operaator on determineeritud funktsioon (vektorfunktsioon).
o sisendid on determineeritud suurused või protsessid
o olekumuutujad on determineeritud suurused või protsessid

22 | P a g e
Deterministliku süsteemi väljundeid on võimalik mineviku alusel täpselt ette ennustada.
Näiteid: kellad, personaalarvutid, päikesesüsteem, täpsed automaatsüsteemid jt. Neid võib teatud tinglikkusega lugeda deterministlikeks süsteemideks.
Kuid väga rangelt deterministlikke süsteeme pole üldse olemas.
Süsteem Lihtne Keerukas
Determineeritud
Süsteemid
Akna riiv
‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
Alajaama projekt
Personaalarvuti
‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
Automaatikasüsteemid
Kriitilisteks punktideks, kus võib asuda funktsiooni optimum, on:
o punktid, kus on f(x) katkevuskoht
o punktid, kus f(x) on pidev, kuid tuletis puudub
o punktid, kus f’(x)=0.
Kui x0 on sileda funktsiooni miinimumkoht, siis f’(x0)=0.
Teoreem
Selleks, et funktsioon omaks punktis x0 lokaalse ekstreemumi on vajalik, et f’(x0)=0.
Teoreem
Kui f(x) on rangelt ülespoole kumer funktsioon, siis ta omab ainult ühe lokaalse maksimumi, mis on ühtlasi ka globaalseks maksimumkohaks.
Teoreem
Kui f(x) on rangelt allapoole kumer funktsioon, siis ta omab ainult ühe lokaalse miinimumi, mis on ühtlasi ka globaalseks miinimumkohaks.
Teoreem
Olgu f(x) allapoole kumer funktsioon ja grad f(x0)=0, siis x0 on miinimumkoht.
Teoreem

23 | P a g e
Olgu f(x) ülespoole kumer funktsioon ja grad f(x0)=0, siis x0 on maksimumkoht.
Rangelt kumerate funktsioonide puhul on tingimus grad f(x0)=0 tarvilikuks ja piisavaks miinimumi /maksimumi tingimuseks.
20. Funktsiooni ja keha kumeruse määrang. Nõgusate sihifunktsioonidega ülesanded. Vajalikud ja piisavad optimumitingimused.
Allapoole kumer funktsioon
Funktsiooni f nimetatakse kumeraks allapoole kui iga reaalarvu α (0<α <1)
ning iga 1x ja 2x korral kehtib võrratus:
)()1()()1(( 2121 xfxfxxf ⋅−+⋅≤−+ αααα
Kui kehtib range võrratus, siis nimetatakse funktsiooni rangelt kumeraks allapoole.
Ülespoole kumer funktsioon
Funktsiooni f nimetatakse kumeraks ülespoole kui iga reaalarvu α (0<α <1)
ning iga 1x ja 2x korral kehtib võrratus:
)()1()()1(( 2121 xfxfxxf ⋅−+⋅≥−+ αααα
Kui kehtib range võrratus, siis nimetatakse funktsiooni rangelt kumeraks ülespoole.
Kui f(x) on allapoole kumer, siis –f(x) on ülespoole kumer ja vastupidi.
Kehtib järgmine võrdus.
))(min()(max xfxf −−=
Optimumtingimused toodud eelmises punktis.
21. Sadulpunkt. Minimaks ülesanded.

24 | P a g e
Punkti (x0, y0) nimetatakse funktsiooni f(x,y) sadulpunktiks, kui x0 on selle funktsiooni miinimumpunktiks ja y0 on maksimumpunktiks:
)0,()0,0(),0( yxfyxfyxf ≤≤ .
22. Sõltuvate muutujate elimineerimise meetod.
Barjäärfunktsioonide meetod(selle kohta ei olnud konspektis sõnagi kirjas, ega leidnud ka kuskilt mujalt seda).
Iga võrrand määrab ära ühe muutuja kui sõltuva muutuja teistest muutujatest. Seega m võrrandit määravad m sõltuvat muutujat. Valime sõltuvateks muutujateks mxx ,...,1 ja sõltumatuteks muutujateks
nm xx ,...,1+ . Siis võib võrrandisüsteemi (5.14) asendada järgmiste funktsioonidega, mis üldjuhul võivad
olla ilmutamata funktsioonid:
),...,( 111 nm xxhx +=
………………….. (5.15)
),...,( 1 nmmm xxhx += .
Viies need sõltuvused sihifunktsiooni (5.13), saame järgmise ilma lisatingimusteta ülesande:
),...,),,...,(),...,,...,((min 1́111 nmnmmnm xxxxhxxhf ++ , (5.16)
kus mxx ,...,1 asemel on sõltuvused (5.15).
Funktsioon (5.16) optimeeritakse sõltumatute muutujate nm xx ,...,1+ järgi. Seega selle meetodi puhul
sõltumatute otsitavate arv väheneb. Alul oli n sõltumatut otsitavat, pärast lisatingimuste asendamist sõltuvustega jääb ülesandesse n‐m sõltumatut muutujat.
Sihifunktsiooni gradiendi arvutamisel tuleb arvestada, et muutujad mxx ,...,1 on sõltuvad suurused.
Sihifunktsiooni gradient on järgmine vektor:
nm xf
xfgradff
∂∂
∂∂
==∇+
,...,1
, (5.17)
kus gradiendi komponendid arvutatakse arvestades sõltuvaid muutujaid mxx ,...,1 :

25 | P a g e
∑= ∂
∂+
∂
∂
∂∂
=∂∂ m
j ii
j
ji xf
xh
xf
xf
1)( . (5.18)
Meetodi eeliseks on sõltumatute muutujate arvu vähenemine.
Meetodi puudusteks on:
1. vajadus korduvalt lahendada lisatingimuste võrrandisüsteemi (5.14),
2. gradiendi arvutamine on keerukas,
3. funktsioonid mhh ,...,1 on üldjuhul ilmutamata funktsioonid.

26 | P a g e
25. Mittelineaarse planeerimise Ulesannete isearasused. Gradient ja gradientmeetodid.
Funktsiooni gradient
Funktsiooni gradient on vektor, mille koordinaatideks on funktsiooni osatuletised vastavate muutujate järgi:
nxf
xfgradff
∂∂
∂∂
==∇ ,...,1
(5.10)
Gradient näitab suunda, milles funktsioon kasvab kõige kiiremini. Antigradient näitab funktsiooni väärtuste kõige kiirema vähenemise suunda.
Gradiendi pikkus
Gradiendi pikkus määratakse valemiga:
∑=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=∇n
i ixff
1
2
.
Gradientmeetod
Vaatleme ülesannet leida funktsiooni f miinimumkoht:
),...,(min 1 nxxf .
Ülesande lahendamise algoritm on järgmine:
1. Valitakse alglähend: >=< 0100 ,..., nxxX
2. Arvutatakse funktsiooni gradient selles punktis:
>∂
∂∂
∂=<
n
iii x
XfxXf
Xgradf)(
,...,)(
)(1
,
kus I on iteratsiooni number. Alglähendi puhul i=0.
3. Lähendi optimaalsuse kontroll:
kontrollitakse kas optimaalsustingimused on täidetud või kas gradiendi pikkus on piisavalt väike:

27 | P a g e
ε≤)( iXgradf ,
kus ε on lubatud lahendusviga.
Jah korral ‐ punkt 5
Ei korral punkt 4.
4. Leitakse uus lähend
gradf
xfsxx ii1
11/ ∂∂
= m
…………………..
gradf
xfsxx n
nini∂∂
=/
m
kus i on iteratsiooni number ja s sammu tegur (s>0), mille väärtus valitakse eksperimentaalselt.
5. Lõpp.
Uue lähendi leidmisel tuleb kasutada märki miinus, kui soovime leida funktsiooni miinimumkohta ja märki pluss, kui soovime leida maksimumkohta. Märk “‐“ tagab lähendi muutumise antigradiendi suunas ja märk “+” – liikumise gradiendi suunas.
26. Trahvifunktsioonide meetod. Lagrange`i meetod
Trahvifunk
T Trahvifunk. graafik
x

28 | P a g e
Kui muutujad lähevad lubatud piiridest välja, siis lisatakse sihifunk‐le trahv, mis on seda suurem, mida suurem on rikkumine. Meetod sobib väga hästi võrratusekujuliste lisatingimuste arvestamiseks.
Trahvifunktsioonide kasutamine halvendab sageli esinevate optimeerimismeetodite koonduvust, kui optimeerimise algoritmid on küllaltki lihtsad.
N:
Vaatleme ül f(x1,...,xn)
Lisatingimusel nibxa iii ...1; =≤≤
Kasutades trahvifunk võime ül formuleerida kujule
)}...()...(min{ 11 nn xxTxxf +
kus T (...) on trahvifunk:
[ ]22
11 )(*)(*)...( iiiiiiii
n
in bxEaxExxT −+−Σ==
βα
kus Ei on trahvitegur:
⎭⎬⎫
⎩⎨⎧
<→≥→
=
⎭⎬⎫
⎩⎨⎧
<→≥→
=
ii
iii
ii
iii
bxbx
axax
10
10
β
α
Ülesande optimaalsustingimused on järgmised:
0=+ii x
Txf
δδ
δδ
i=1...n
Võrrandikujulisi lisatingimusi aitab arvestada järgmine trahvifunktsioon:
( ) [ ])...(... 12
11 nj
m
jn xxgxxT=Σ=
Lagrange
Meetod seisneb selles, et ette antud tingimusliku (piirangutega) optimeerimisülesande asemel lahendatakse piiranguteta ül
Lagrange meetodi tuletamiseks vaatleme ühe vabadusastmega ülesannet:
),(min 21 xxF (5.19)

29 | P a g e
lisatingimusel, et
0),( 21 =xxg . (5.20)
Vaatleme, et võrrand (5.20) määrab 1x sõltuvana 2x :
)( 211 xhx = . (5.21)
Viime selle sõltuvuse tagasi võrrandisse (5.20). Siis muutub see võrrand samasuseks:
0)),(( 221 ≡xxhg . (5.22)
Samasuse korral on ka tuletis 2x järgi võrdne nulliga:
022
1
12
=+=dxdg
dxdx
dxdg
dxdg
. (5.23)
Märgime, et
2
1
2
1
dxdh
dxdx
= .
Eeldame, et
02
1 ≠dxdx
.
Siis saame võrrandist (5.23):
1
2
2
1
dxdgdxdg
dxdx
−= . (5.24)
Viime sõltuvuse (5.21) ka sihifunktsiooni. Siis saame järgmise optimaalsustingimuse:
22
1
12 dxdF
dxdx
dxdF
dxdF
+≡ (5.25)
Arvestades võrdust (5.24) saame:
λ==
2
2
1
1
dxdgdxdF
dxdgdxdF
.
(5.26)
Seega võib ülesande optimaalsustingimused avaldada järgmisel kujul:

30 | P a g e
011
=−dxdg
dxdF λ
(5.27)
022
=−dxdg
dxdF λ
(5.28)
kus λ on mingi konstant, mida nimetatakse Lagrange kordajaks.
Nüüd selgub, et selle asemel, et lahendada lisatingimusega optimeerimisülesanne (5.19)‐(5.20), võib optimeerida järgmist funktsiooni ilma lisatingimusteta, sest nende ülesannete optimaalsustingimused on samad:
),(),( 2121 xxgxxF λ−=Φ . (5.29)
Funktsiooni Φ nimetatakse Lagrange funktsiooniks. Funktsiooni Φ optimaalsustingimusteks on võrrandid (5.26) ja (5.27).
Seega võib ülesande (5.19)‐(5.20) asemel lahendada ülesande
),,(min 21 λxxΦ (5.30)
kusjuures λ väärtus tuleb valida selline, et oleks täidetud lisatingimus (5.20).
Uuemas optimeerimisteoorias on tõestatud, et ülesandega (5.19)‐(5.20) on ekvivalentne ka järgmine minmax‐ülesanne:
),,(maxmin 21 λxxΦ , (5.31)
kus Lagrange funktsioon minimeeritakse 21,.xx järgi ja maksimeeritakse λ järgi.
Vaatleme nüüd üldist lisatingimustega optimeerimisülesannet (5.13)‐(5.14). Selle ülesande lahendamine Lagrange meetodil toimub järgmise skeemi kohaselt:
1. Koostada Lagrange funktsioon:
∑=
⋅−=Φm
jnjjn xxgxxf
111 ),...,(),...,( λ . (5.32)
2. Koostada optimaalsustingimused:
∑=
=∂∂
⋅−∂∂
=∂Φ∂ m
j ij
ii xg
xf
x 10λ , i=1,…,n; (5.33)
0),...,( 1 ==∂Φ∂
njj
xxgλ
, j=1,…,m. (5.34)

31 | P a g e
3. Leida optimaalne lahend otsesel või kaudsel meetodil. Kaudse meetodi puhul leitakse optimaalne lahend optimaalsustingimuste (5.33)‐(5.34) lahendamise teel.
Langrange meetod on kasutatav ka võrratusekujuliste lisatingimuste puhul (Kuhn‐Tuckeri tingimused).
N:
( ) ( ) ( ) ( )[ ]( )( )
( ) ( )
( )
( )
( )
( )
010042
02*4*52
02*2102
02*42
02*24
;;;);;;(;;;;;;0500
;;;010042510422min
432111
42144
3133
22122
12111
4321224321114321
4321224
23
22
21
432114321
24
23
22
21
=−+++==Φ
=−−−=Φ
=−−−=Φ
=−−−=Φ
=−−−=Φ
−−=Φ⇒=−+++
⇒=−+++−+−+−+−
xxxxg
xxx
xxx
xxx
xxx
xxxxgxxxxgxxxxFxxxxgxxxx
xxxxgxxxxxxxx
δλδ
λλδδ
λλδδ
λλδδ
λλδδ
λλ
050024
23
22
212
2
=−+++==Φ xxxxg
δλδ

32 | P a g e
29. MonteCarlo meetod. Juhuslike arvude tekitamine ja muundamine
http://en.wikipedia.org/wiki/Monte_Carlo_method
http://en.wikipedia.org/wiki/Random_number_generator
In general, Monte Carlo methods are used in mathematics to solve various problems by generating suitable random numbers and observing that fraction of the numbers obeying some property or properties. The method is useful for obtaining numerical solutions to problems which are too complicated to solve analytically. The most common application of the Monte Carlo method is Monte Carlo integration.
Interestingly, Monte Carlo simulation methods do not generally require truly random numbers to be useful ‐ for other applications, such as primality testing, unpredictability is vital (see Davenport (1995) [3]). Many of the most useful techniques use deterministic, pseudo‐random sequences, making it easy to test and re‐run simulations. The only quality usually necessary to make good simulations is for the pseudo‐random sequence to appear "random enough" in a certain sense.
What this means depends on the application, but typically they should pass a series of statistical tests. Testing that the numbers are uniformly distributed or follow another desired distribution when a large enough number of elements of the sequence are considered is one of the simplest, and most common ones.
Monte Carlo methods are useful in many areas of computational mathematics, where a lucky choice can find the correct result. A classic example is Rabin's algorithm for primality testing: for any n which is not prime, a random x has at least a 75% chance of proving that n is not prime. Hence, if n is not prime, but x says that it might be, we have observed at most a 1‐in‐4 event. If 10 different random x say that n is probably prime when it is not, we have observed a one‐in‐a‐million event. In general a Monte Carlo algorithm of this kind produces one correct answer with a guarantee n is composite, and x proves it so, but another one without, but with a guarantee of not getting this answer when it is wrong too often ‐ in this case at most 25% of the time.

![& 7X jkl)#] - SCNU · 2019-12-16 · -W ! ! > 89 5C nrst$¥ l)NOF } di 4 * ^ ¦§; ! rst$¥ l, EZ F rst$¥ l§v#CRÇ (!¤)l)CÅÆ rst$¥ l,§v F (!¤"ÝV -W ! rst$¥ l,cèá ( !¤](https://img.pdfslide.tips/doc/110x75/5e36e3e7fa9fe449df463b46/-7x-jkl-scnu-2019-12-16-w-89-5c-nrst-lnof-di-4-.jpg)