Embed Size (px)
Citation preview

Alen Bračič
UPORABA SIMOVERT VC MASTERJA ZA POGON TRANSPORTNEGA TRAKU
Diplomsko delo
Maribor, april 2010

II

III
Diplomsko delo visokošolskega strokovnega študijskega programa
Maribor, april 2010
Študent: Alen Bračič
Študijski program: VS ŠP Elektrotehnika
Smer: Močnostna elektrotehnika
Mentor: red. prof. dr. Mladen TRLEP
Somentor: doc. dr. Marko JESENIK

IV
ZAHVALA
Zahvaljujem se mentorju red. prof. dr. Mladenu
Trlepu za pomoč in vodenje pri opravljanju
diplomskega dela. Prav tako se zahvaljujem
somentorju doc. dr. Marku Jeseniku. Hvala tudi
babici Veri za ves njen trud.
Posebna zahvala velja družini, ki mi je omogočila
študij.
V
UPORABA SIMOVERT VC MASTERJA ZA POGON
TRANSPORTNEGA TRAKU
Ključne besede: frekvenčni pretvornik, asinhronski motor, transportni trak, električni
pogon
UDK: 621.314.26:621.313.333(043.2)
Povzetek
Diplomsko delo obravnava krmiljenje transportnega traku s pomočjo frekvenčnega
pretvornika. V začetnem delu je predstavljen frekvenčni pretvornik SIMOVERT VC
MASTER 6SE7021. Poudarek je na spoznavanju siemensovega programskega orodja za
nastavljanje parametrov pretvornika. Nato se pridobljeno znanje uporabi pri
parametriranju pogona transportnega traku. Cilj diplomske naloge je bil analizirati
izmerjene časovne poteke napetosti, frekvence, toka in hitrosti ter ugotoviti, katera
nastavitev parametrov frekvenčnega pretvornika je najugodnejša za pogon transportnega
traku.

VI
USE OF THE SIMOVERT VC MASTER FOR THE CONVEYORS
BELT DRIVE
Key words: frequency converter, induction motor, conveyors belt, electric drive
UDK: 621.314.26:621.313.333(043.2)
Abstract
Dissertation deals with the study of the frequency converter used for the conveyors belt
drive. The first part of the dissertation contains the description of the SIMOVERT VC
MASTER 6SE7021. Emphasis is on the study of the Siemens software for parameters
setting. The acquired knowledge is used for the conveyors belt parametrization. The aim of
the dissertation was to analyse the time line of the voltage, frequency, current and
rotations. On the basis of the analyses we tried to find the best parameters settings for the
conveyors belt drive.

VII
KAZALO
1 UVOD ............................................................................................................................ 1 2 TEORIJA ASINHRONSKEGA MOTORJA ................................................................ 2
2.1 Uvod ......................................................................................................................... 2 2.1 Zagon asinhronskih motorjev .................................................................................... 3
2.2.1 Zagon zvezda (Y)/ trikot (Δ) ........................................................................... 4 2.2 Spreminjanje vrtljajev asinhronskega motorja ....................................................... 5
2.2.1 Spreminjanje vrtljajev s spreminjanjem slipa .................................................. 5 2.2.2 Spreminjanje vrtljajev s spreminjanjem Us ..................................................... 6
2.2.3 Spreminjanje vrtljajev s spreminjanjem Us in fs .............................................. 7
2.3 Načini obratovanja ASM ........................................................................................ 8 3 OPIS SIMOVERT VC MASTERJA ........................................................................... 10
3.1 Načini vnašanja parametrov .................................................................................. 11
3.2 Najpomembnejši parametri ................................................................................... 13 3.3 Koraki parametriranja SVCM s pomočjo Drive Monitorja ................................. 14 3.4 Grafični vmesnik ................................................................................................... 24
3.5 Script Datoteka ..................................................................................................... 26 4 DELOVANJE ELEKTRIČNEGA POGONA ............................................................. 28 5 PARAMETRIRANJE POGONA ZA PRIMER TRANSPORTNEGA TRAKU ....... 30
5.1 Izračun podatkov pogona ...................................................................................... 30 5.2 Analiza pogona pri različnih delovnih točkah ...................................................... 36
5.3 Nastavitev parametrov za želen cikel obratovanja pogona ................................... 46 6 SKLEP ......................................................................................................................... 50
7 LITERATURA ............................................................................................................ 51 8 PRILOGE .................................................................................................................... 52
8.1 Seznam slik ........................................................................................................... 52 8.2 Seznam tabel ......................................................................................................... 53 8.3 Naslov študenta ..................................................................................................... 53
8.4 Kratek življenjepis ................................................................................................ 53

VIII
UPORABLJENI SIMBOLI
ASM – Asinhronski motor
SVCM – Simovert VC Master
PMU – » Parametrization unit«
DM – » Drive monitor«
EP – Električni pogon
SF – »Script File«

IX
UPORABLJENE KRATICE
Mm – navor motorja (Nm)
Mb – navor bremena (Nm)
Us – statorska napetost (V)
fs – statorska frekvenca (Hz)
fr – rotorska frekvenca (Hz)
Es – inducirana napetost na statorju (V)
Pp – moč pogona (W)
Pn – nazivna moč motorja (W)
nn – nazivni vrtljaji motorja (min-1
)
ns – sinhronski vrtljaji motorja (min-1
)
I – tok motorja (A)

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 1
1 UVOD
Električni pogoni (EP) so namenjeni pretvarjanju električne energije v mehansko in iz
mehanske v električno. EP lahko najdemo v industriji kot tudi doma pri vsakdanjem
uporabniku in obsegajo področje električnih strojev, delovnih strojev, mehanike, itd.
Pri projektiranju pogona vedno izhajamo iz zahtev delovnega stroja in ne iz
razpoložljivih karakteristik pogonskega stroja, zato je prilaganje ES delovnemu stroju
najpomembnejši korak do kvalitetnega pogona. EP ima določene prednosti pred ostalimi
pogoni, kot so enostavno krmiljenje in regulacija, male izgube v prostem teku, velik
izkoristek v obratovanju, enostavna prilagoditev na delovni stroj, itd.
V sodobnih aplikacijah se vedno pogosteje pojavljajo potrebe po pogonih s
spremenljivo hitrostjo. V osnovi lahko električni motorji obratujejo s konstantno ali
spremenljivo hitrostjo. Danes s konstantno hitrostjo obratuje veliko pogonov v industriji,
vendar pa se strmo dviguje delež aplikacij, kjer potrebujemo vodenje po hitrosti in navoru.
Tipičen pogon s spremenljivo hitrostjo vsebuje električni motor, mehansko povezavo,
mehansko breme (proga), elektromehanski ali elektronski sistem za vklop/izklop ter zaščite
in močnostni pretvornik.
Za EP lahko uporabljamo različne elektromotorje. V okviru naše naloge imamo motor
s kratkostično kletko, katerega vodimo s frekvenčnim pretvornikom Simovert VC master -
6SE7021-0E.6. ASM spreminjamo hitrost vrtenja s spreminjanjem napajalne frekvence in
napetosti.
Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 2
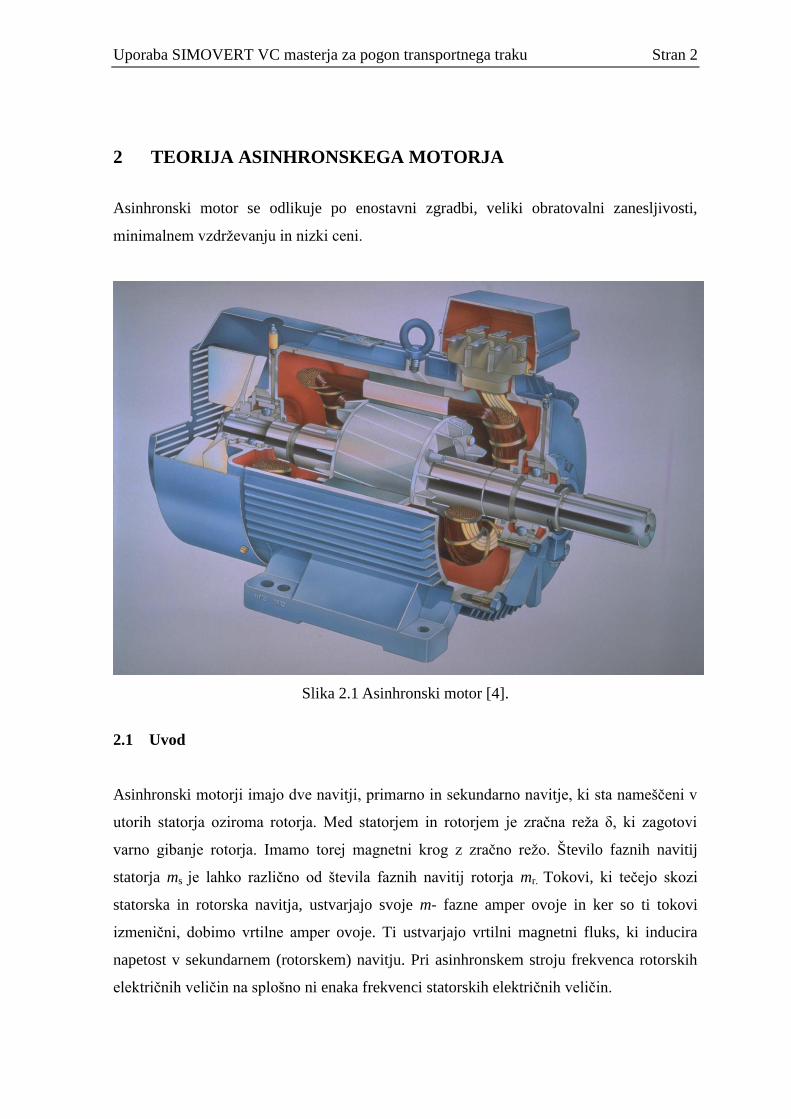
2 TEORIJA ASINHRONSKEGA MOTORJA
Asinhronski motor se odlikuje po enostavni zgradbi, veliki obratovalni zanesljivosti,
minimalnem vzdrževanju in nizki ceni.
Slika 2.1 Asinhronski motor [4].
2.1 Uvod
Asinhronski motorji imajo dve navitji, primarno in sekundarno navitje, ki sta nameščeni v
utorih statorja oziroma rotorja. Med statorjem in rotorjem je zračna reža δ, ki zagotovi
varno gibanje rotorja. Imamo torej magnetni krog z zračno režo. Število faznih navitij
statorja ms je lahko različno od števila faznih navitij rotorja mr. Tokovi, ki tečejo skozi
statorska in rotorska navitja, ustvarjajo svoje m- fazne amper ovoje in ker so ti tokovi
izmenični, dobimo vrtilne amper ovoje. Ti ustvarjajo vrtilni magnetni fluks, ki inducira
napetost v sekundarnem (rotorskem) navitju. Pri asinhronskem stroju frekvenca rotorskih
električnih veličin na splošno ni enaka frekvenci statorskih električnih veličin.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 3
Slika 2.2 Slika tri faznega asinhronskega motorja s kratkostično kletko [2].
Asinhronski stroj ima pri svojem normalnem obratovanju sekundarno navitje kratko
sklenjeno. Kakor hitro se začne rotor gibati, se joulske izgube v rotorskem navitju znižajo,
raste pa mehanska moč na gredi stroja. Vrtilni magnetni fluks stroja se vrti s sinhronskim
številom vrtljajev ns glede na mirujoč stator, rotor pa z vrtljaji n < ns, torej asinhrono.
2.1 Zagon asinhronskih motorjev
Ob priklopu asinhronskega motorja na omrežje bo iz omrežja stekel velik zagonski tok, ki
je bistveno večji od nazivnega. Velik zagonski tok lahko povzroči velike padce napetosti v
omrežju, ti pa lahko povzročijo, da zaščita izklopi motor. Zato direktno zaganjamo samo
motorje majhnih moči.
Za zmanjševanje toka Iz in moment Mz (mehki zagon) uporabljamo :
- zagon zvezda – trikot,
- zagon z znižano napetostjo,
- zagon z rotorskimi upori (pri motorjih z navitim rotorjem),
- frekvenčni zagon,
- zagon s predupori.
Od naštetih bom v nadaljevanju podrobneje opisal samo zagon zvezda – trikot.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 4
2.2.1 Zagon zvezda (Y)/ trikot (Δ)
Zagon zvezda/trikot se uporablja pri motorjih manjših in srednjim moči. Za takšen zagon
morata biti izpolnjena dva pogoja :
- osnovna vezava motorja je trikot,
- dostop do začetkov in koncev posameznih faz statorskega navitja.
Slika 2.3 Zagon zvezda/trikot [1].
Ob zagonu zmanjšamo napetost tako, da vežemo statorsko navitje v zvezdo. Pri dovolj
velikem številu vrtljajev pa preklopimo motor v trikot.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 5
Slika 2.4 Preklop zvezde v trikot[1].
Pozorni moramo biti, da je preklop zvezde v trikot opravljeno dovolj pozno. Kajti ob
prehitrem preklopu ne dosežemo želenega znižanja vrednosti momenta med zagonom.
2.2 Spreminjanje vrtljajev asinhronskega motorja
Asinhronski motor nam nudi več možnosti spreminjanja vrtljajev. Spreminjano jih lahko s
spreminjanjem slipa, števila polovih parov, statorske napetosti in frekvence.
2.2.1 Spreminjanje vrtljajev s spreminjanjem slipa
Vrtljaje lahko spreminjamo v področju pod naravno karakteristiko, tako da vključimo v
rotorski tokokrog dodatne upore. Z dodajanjem Rd v rotorski tokokrog se spremeni omahni
slip, medtem ko Mom
ostane nespremenjen, kar pomeni, da postajajo momentne
karakteristike bolj mehke. Območje spreminjanja vrtljajev je razmeroma veliko, odvisno
pa je od Mb. Velika pomanjkljivost pa so dodatne izgube pri tem načinu nastavljanja n, ki

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 6
zelo poslabšajo izkoristek pogona. Znano je, da so izgube Pcu2 sorazmerne slipu, zato večje
spreminjanje slipa tudi povečuje delež izgub v sprejemani moči P1. Zaradi tega
uporabljamo ta način le v manjšem obsegu spreminjanja vrtljajev in še to pri kratkotrajnem
obratovanju.
Slika 2.5 Spreminjanje n z dodajanjem Rd [1].
2.2.2 Spreminjanje vrtljajev s spreminjanjem Us
Iz teorije ASM vemo, da se M pri konstantnem slipu spreminja s kvadratom Us, pri čemer
je slip odvisen seveda od Mb. Zvezno spreminjanje n je omogočeno z brezstopenskim
spreminjanjem statorske U. Pri zmanjševanju Us se zmanjšujejo n in tudi Mom. Obseg
spreminjanja n je omejen z velikostjo Mb in samo obliko momentne karakteristike ASM.
Običajno je možen obseg spreminjanja n zelo majhen, razen če omogočimo obratovanje
tudi v nestabilnem delu karakteristike. Vendar pa to na drugi strani prinaša velike izgube,
kar ni zaželeno. Večje področje spreminjanja n lahko dosežemo pri ASM z drsnimi obroči
z veliko rotorsko upornostjo. Vendar se tudi tukaj ne moremo izogniti povečanju izgub. Je
pa prednost ta, da se del izgub porabi zunaj motorja na uporih. Če vzamemo primer
spreminjanja n pri Mb= konst., vidimo, da je takšen pogon nekvaliteten, posebej pri nizkih

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 7
vrtljajih, saj je preobremenljivost (Mom /Mn) minimalna. Karakteristike so zelo mehke, kar
pomeni, da majhna sprememba Mb povzroči veliko spremembo n. Praktično se ta način
uporablja le za kratkotrajno obratovanje, razen pri ventilatorskih bremenih, kjer ni
problemov s segrevanjem, zaradi istočasnega padanja karakteristike motorja in Mb pri
znižanju n.
Slika 2.6 Spreminjanje n s spreminjanjem Us [1].
2.2.3 Spreminjanje vrtljajev s spreminjanjem Us in fs
Ta način spreminjanja n je pogosto uporabljan in je najbolj primeren za motorje s
kratkostično kletko. Vrtljaji so določeni z enabčo 2.1.
ss
601 1
fn n s s
p
(2.1)
S tem, da spreminjamo frekvenco fs, spreminjamo ns v relativno širokem obsegu. S
spremembo fs se spreminja tudi fluks in s tem momentne karakteristike ASM (v področju
od 0 – 50 Hz fluks narašča, kar ni ugodno). Zaradi tega moramo spreminjati tudi napetost
Us. Iz enačbe za inducirano napetost v statorskem navitju izhaja, da lahko obdržimo fluks
približno konstanten ob ustrezni spremembi Us in fs.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 8
2.3 Načini obratovanja ASM
a) Obratovanje pri Us /fs= konst.
Razmerje Us / fs = konst. je omejeno samo na področje od 0Hz do 50Hz. Fluks se v tem
področju pri zmanjševanu fs zmanjšuje, zmanjšuje se tudi Es. Razlog tiči v dejstvu, da je
statorski ohmski padec napetosti pri Mb=konst. praktično konstanten v celotnem področju
spreminjanja frekvence. Zaradi tega ima relativno večji vpliv pri nižjih frekvencah, kar
pomeni večje zmanjšanje Es (kot Us) in s tem tudi zmanjševanje fluksa. To se kaže z
zmanjševanjem omahnega momenta, kar lahko v nekaterih pogonih pripelje do problemov
zaradi zmanjšanja faktorja preobremenitve.
Slika 2.7 Karakteristika n pri spremembi fs [1].
Če želimo obdržati približno konstantno vrednost fluksa, moramo kompenzirati statorski
(ohmski) padec, kar naredimo z dodatnim povečevanjem napetosti US (krmiljenje /
regulacija).
V področju nad 50Hz ne spreminjamo US, tako da se v tem področju fluks zmanjšuje
(slabljenje polja). Obremenitev motorja je potrebno v tem delu zmanjšati (običajno je meja
maksimalne obremenitve Pb = konst.)
Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 9
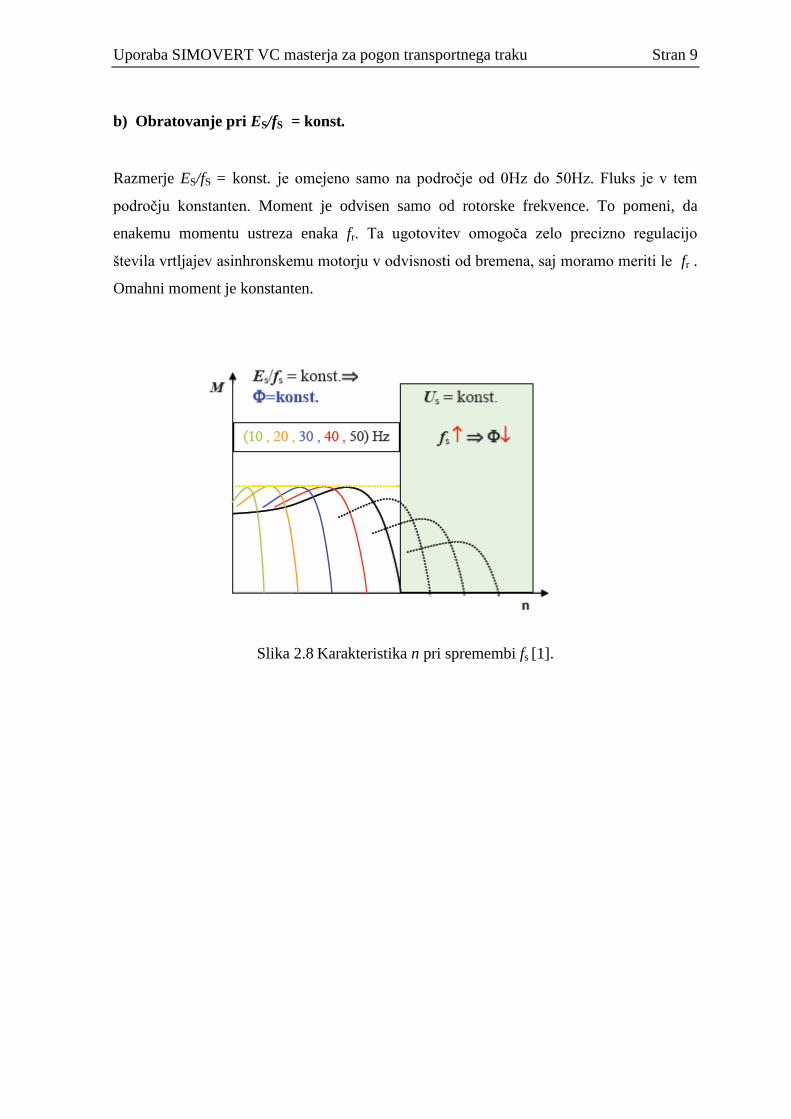
b) Obratovanje pri ES/fS = konst.
Razmerje ES/fS = konst. je omejeno samo na področje od 0Hz do 50Hz. Fluks je v tem
področju konstanten. Moment je odvisen samo od rotorske frekvence. To pomeni, da
enakemu momentu ustreza enaka fr. Ta ugotovitev omogoča zelo precizno regulacijo
števila vrtljajev asinhronskemu motorju v odvisnosti od bremena, saj moramo meriti le fr .
Omahni moment je konstanten.
Slika 2.8 Karakteristika n pri spremembi fs [1].

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 10
3 OPIS SIMOVERT VC MASTERJA
Slika 3.1 Simovert VC master.
Simovert VC master spada v družino siemensovih frekvenčnih pretvornikov. Namenjen je
krmiljenju izmeničnih motorjev. Motorju lahko spreminjamo vrtljaje s spreminjanjem
napetosti U in frekvence f. Spreminjanje vrtljajev poteka po funkciji U/f=konstanta.
Pretvornik lahko obratuje v odprti zanki, kjer je možna nastavitev frekvence f, ali zaprti
zanki, kjer je možna regulacija navora in regulacija vrtljajev.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 11
3.1 Načini vnašanja parametrov
a) Z uporabo PMU - (Parametrization unit)
Slika 3.2 PMU.
PMU enota je nameščena neposredno na SVCM in omogoča ročni vnos parametrov.
PMU je sestavljen iz naslednjih delov:
- prikazovalnik prikazuje obratovalna stanja, parametre, alarme, itd.,
- p tipka, ki omogoča vnos patametrov, izbiro vrste parametrov in brisanje napak,
- tipki gor in dol, ki omogočata izbiro vrednosti parametrov,
- tipka za vklop,
- tipka za izklop,
- tipka, ki omogoča spremembo smeri vrtenja motorja,
- serijski priključek (X300), ki omogoča povezavo napajalnika s PC-jem.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 12
b) Z uporabo programskega orodja <Drive monitor> DM
Slika 3.3 DM.
Parametre smo nastavljali preko serijskega vmesnika na računalniku, torej s pomočjo DM.
Nastavljanje s pomočjo DM ima številne prednosti pred nastavljanju s PMU. Nekatere
prednosti so:
- boljša preglednost parametrov,
- možnost nastavljanja po korakih,
- lažja dostopnost,
- možnost parametriranja na daljavo.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 13
SVCM ima dve vrsti parametrov:
a) Vizualne
Vizualni parametri se ne morejo spreminjati in se uporabljajo za spremljanje trenutnih
veličin. Njihova struktura je naslednja : rXXX in nXXX
b) Nastavljive
Nastavljivi parametri se lahko spreminjajo. Njihova struktura je naslednja: PXXX ali
UXXX.
V listi parametrov v DM se parametri ločijo tudi po barvah. Obarvani so z naslednjimi
barvami :
- zeleno obarvani parametri, ki ji lahko spreminjano med obratovanjem,
- rumeno obarvani, ki jih nikdar ne moremo spreminjati,
- modro obarvani, ki jih ne moremo spreminjati med obratovanjem.
3.2 Najpomembnejši parametri
- za definiranje asinhronskega motorja
P101 – nazivna napetost motorja Un
P102 – nazivni tok motorja In
P104 – faktor delavnosti motorja cosρ
P105 – nazivna moč motorja Pn
P106 – izkoristek motorja η
P107 – nazivna frekvenca motorja fn
P108 – nazivni vrtljaji motorja nn
P109 – število polovih parov
P113 – nazivni moment motorja Mn
Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 14
- za definiranje pogona
P330 – način spremembe U in f
P350 – referenčna vrednost toka Iref
P351 – referenčna vrednost napetosti Uref
P352 – referenčna vrednost frekvence Iref
P353 - referenčna vrednost vrtljajev nref
P354 – referenčna vrednost momenta Mref
- za definiranje karakteristike hitrosti
P462 – čas pospeševanja tp
P464 – čas zaviranja tz
P469 – čas začetne zaokrožitve tzz
P470 – čas končne zaokrožitve tkz
- za definiranje omejitve navora, toka in frekvence ASM
P128 – maksimalna vrednost toka
P492 – maksimalna vrednost navora za eno smer vrtenja
P498 – maksimalna vrednost navora za drugo smer vrtenja
3.3 Koraki parametriranja SVCM s pomočjo Drive Monitorja
Drive monitor omogoča vnos parametrov na dva načina.
a) Direkten vnos podatkov v celotno tabelo parametrov
Parametre lahko vnesemo direktno preko tabele parametrov. Ta način vnašanja parametrov
je zahtevnejši. Lahko se zgodi, da pozabimo vnesti katerega izmed pomembnih
parametrov.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 15
Slika 3.4 Del tabele parametrov.
Tabela parametrov ima naslednje stolpce :
- številka parametra
Vsak parameter ima svojo številko, po katerem ga prepoznamo.
- ime parametra
Nekatera imena so takšna, da takoj ugotovimo fizikalni pomen parametra. Pri drugih pa si
lahko pomagamo s programsko pomočjo, ki je integrirana v program.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 16
- indeks parametra
Lahko vnesemo več vrednosti parametra, ki se nato uporabljajo za pogon do štirih
motorjev oziroma režimov obratovanja motorja.
Indeks parametra
Slika 3.5 Indeks parametra.
- vrednost parametra
Vrednost parametra je odvisna od tega, ali imamo fizikalne veličine (tok, napetost
frekvenca itd.). Takšne vrednosti so prikazane s številkami. Lahko pa se zgodi, da je
vrednost parametrov napisana z besedami (omogočen, veljaven itd.). Z dvojnim klikom na
izbrani parameter nastavljamo njegovo vrednost, kar je prikazano na sliki 3.6, ali pa imamo
možnost izbire ene izmed opcij, ki nam je ponujena, prikazano na sliki 3.7.
Slika 3.6 Vnos vrednosti parametra.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 17
Slika 3.7 Vnos vrednosti parametra.
- enota
Parametri lahko imajo naslednje enote:
- fizikalne enote, kot so amper A, frekvenca Hz itd.,
- enote v %, ki pomenijo odstotek referenčne vrednosti,
- nekateri parametri so brez enot.
enota
Slika 3.8 Prikaz enot.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 18
b) Parametriranje z uporabo prednastavljenih korakov
Ta način vnašanja parametrov je enostavnejši, saj nas vodi po korakih in pomaga izbrati
najpomembnejše parametre. Po končanem vnašanju lahko gremo pogledat celotno listo
parametrov in po želji popravimo katerega od parametrov.
Slika 3.9 Nastavljanje tipa frekvenčnega pretvornika.
Z grafičnim oknom na sliki 3.9 nastavimo tip frekvenčnega pretvornika. V našem primeru
je to 6SE7021-0E.6. Vnesemo še vrednost napajalne napetosti.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 19
Slika 3.10 Nastavljanje parametrov motorja
Z grafičnim oknom na sliki 3.10 nastavimo tip motorja. Če v siemensovi bazi podatkov
najdemo naš motor, program avtomatsko nastavi nazivne podatke motorja. Kadar tip
motorja ni v bazi podatkov, moramo izpolnit naslednje podatke:
- nazivna napetost motorja,
- nazivni tok motorja,
- magnetilni tok,
- faktor delavnosti,
- frekvenca motorja,
- nazivno število vrtljajev,
- število polovih parov,
- nazivni navor motorja.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 20
Slika 3.11 Nastavljanje tipa merilnika vrtljajev.
Z grafičnim oknom na sliki 3.11 nastavimo tip merilnika vrtljajev. V našem primeru smo
izbrali opcijo brez merilnika vrtljajev.
Slika 3.12 Nastavljanje načina hlajenja motorja.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 21
Z grafičnim oknoma na sliki 3.12 nastavimo vrsto temperaturnega senzorja in način
hlajenja motorja. V našem primeru nismo imeli temperaturnega senzorja, motor ima lastno
hlajenje.
Slika 3.13 Nastavljanje način krmiljenja motorja.
Z grafičnim oknom na sliki 3.13 nastavimo način krmiljenja motorja. V našem primeru
smo imeli U/f odprto zančno krmiljenje.
Možni načini krmiljenja, če nimamo merilnika vrtljajev, so :
1. U/f odprto zančno krmiljenje,
2. U/f odprto zančno krmiljenje za tekstilno aplikacijo,
3. Zaprto zančno krmiljenje brez merilnika vrtljajev.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 22
Slika 3.14 Nastavljanje časovnega poteka pogona.
Z grafičnim oknom na sliki 3.14 nastavimo čas pospeševanja, čas pojemanja in hitrostno
omejitev.
1. Nastavitev časa pospeševanja od 0 do referenčne vrednosti v sekundah.
V našem primeru smo vnesli 0,5 s.
2. Nastavitev časa pojemanja od referenčne vrednosti do 0 v sekundah.
V našem primeru smo vnesli 0,5 s.
3. Nastavitev časa začetne zaokrožitve v sekundah.
V našem primeru smo vnesli 0,1 s.
4. Nastavitev časa končne zaokrožitve v sekundah.
V našem primeru smo vnesli 0,1 s.
5. Omejitev hitrosti vrtenja v pozitivni smeri v %.
V našem primeru smo vnesli 200%.
6. Omejitev hitrosti vrtenja v negativni smeri v %.
V našem primeru smo vnesli -200%.
7. Izpis referenčne vrednosti frekvence v Hz.
V našem primeru je 50 Hz.
Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 23
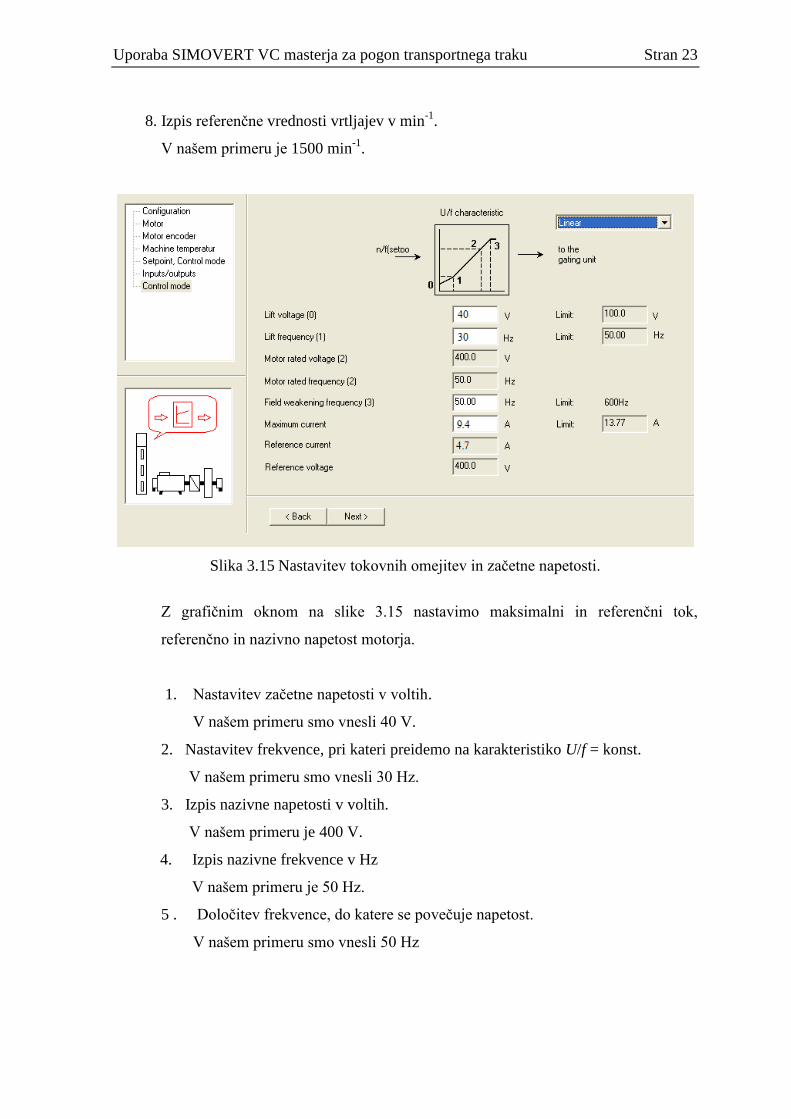
8. Izpis referenčne vrednosti vrtljajev v min-1
.
V našem primeru je 1500 min-1
.
Slika 3.15 Nastavitev tokovnih omejitev in začetne napetosti.
Z grafičnim oknom na slike 3.15 nastavimo maksimalni in referenčni tok,
referenčno in nazivno napetost motorja.
1. Nastavitev začetne napetosti v voltih.
V našem primeru smo vnesli 40 V.
2. Nastavitev frekvence, pri kateri preidemo na karakteristiko U/f = konst.
V našem primeru smo vnesli 30 Hz.
3. Izpis nazivne napetosti v voltih.
V našem primeru je 400 V.
4. Izpis nazivne frekvence v Hz
V našem primeru je 50 Hz.
5 . Določitev frekvence, do katere se povečuje napetost.
V našem primeru smo vnesli 50 Hz

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 24
6 . Nastavitev maksimalne vrednosti toka v amperih.
V našem primeru smo vnesli 9,4 A.
7. Izpis referenčnega toka v amperih
V našem primeru je 4,7A.
8 . Izpis referenčne vrednosti napetosti v voltih.
V našem primeruje je 400 V.
Slika 3.16 Okno za potrditev konfiguracije.
Grafično okno 3.16 prikazuje osnovne podatke celotnega pogona. V njem lahko preverimo
podatke, preden potrdimo nastavitev.
3.4 Grafični vmesnik
Funkcija Trace v DM nam lahko posname časovne poteke različnih veličin. Trace je
grafični vmesnik za risanje časovnih potekov tokov, vrtljajev, napetosti, navora…

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 25
Slika 3.17 Grafični vmesnik
V našem primeru smo posneli časovne poteke toka, napetosti in frekvence.
Slika 3.18 Časovni poteki v grafičnem vmesniku.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 26
3.5 Script Datoteka
Realizacijo zahtevnejših pogonov lahko izvedemo s pomočjo »script datoteke«. Pogon
opravimo tako, da ustrezen program napišemo v urejevalniku »script datoteke« in ga
izvedemo v DM. S pomočjo »script datoteke« spreminjamo parametre z uporabo ustrezni
ukazov. Najpomembnejši ukazi so :
- Write
Ukaz »Write« uporabljamo za vpis vrednosti želenega parametra. Ukazu sledi številka
parametra, indeks parametra in nova vrednost parametra.
- Time
Ukaz »time« uporabljamo za nastavitev zakasnitve. Ukazu »time« sledi številka, ki določa
čas zakasnitve.
- Read
Ukaz »Read« uporabljamo za branje vrednosti parametra. Ukazu sledi številka želenega
parametra.
- Call
Ukaz »call« uporabljamo za klicanje predhodno izbranega programa. Ukazu »call« sledi
ime datoteke v narekovajih.
Razen omenjenih ukazov še lahko uporabljamo »if«, »if-else« stavke, »for«, »do- while«
zanke, funkcije, itd…
Slika 3.19 nam prikazuje »script datoteko« za izvedbo enega cikla obratovanja pogona.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 27
Slika 3.19 Cikel pogona v urejevalniku »script datotek«.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 28
4 DELOVANJE ELEKTRIČNEGA POGONA
Pogon, na katerem smo izvajali meritve, je sestavljen iz frekvenčnega pretvornika za
krmiljenje ASM, ASM, merilnika navora, bremena ter merilnika hitrosti. Za pogonski stroj
smo uporabili ASM s kratkostično kletko. Gredi motorjev sta povezani s sklopkami in
momentno merilno gredjo. Za simuliranje tekočega traku smo uporabili aktivno breme.
Pogonski stroj (ASM) merilnik navora aktivno breme merilnik hitrosti
Slika 4.1 Slika električnega pogona.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 29
Ker nismo imeli tekočega traku, smo bremensko karakteristiko simulirali z aktivnim
bremenom. Aktivna bremena omogočajo testiranje pogonskih strojev, ne da bi imeli na
razpolago dejansko breme. Uporabljeno aktivno breme je sestavljeno iz ASM, ki je
krmiljen s frekvenčnim pretvornikom z ustrezno programsko opremo. V program
vnesemo želeno bremensko karakteristiko v obliki polinomoma. V našem primeru smo
vnesli samo konstanten člen, kar pomeni konstanten navor. ASM, ki smo ga uporabili
za aktivno breme, ima nazivne podatke podane v tabeli 4.1.
Tabela 4.1 Nazivni podatki ASM aktivnega bremena.
UN (V) IN (A) fN (Hz) PN (kW) nN (min-1
)
230/400 ∆/Y 20,6/11,9 ∆/Y 50 5,5 1455
Nazivni podatki uporabljenega ASM so podani v tabeli 4.2.
Tabela 4.2 Nazivni podatki ASM.
UN (V) IN (A) fN (Hz) PN (kW) nN (min-1
) cos φ η
400/690 ∆/Y 8,2/4,7 ∆/Y 50 4 1440 0,83 0,85
Ker imamo motor napajan z znižano napetostjo (400 V) v vezavi Y, moramo preračunati
moč motorja in navora po enačbah 4.1.
n
3 cos 3 400 4,7 0,83 0,85 2297,29W
60 2297,29 6015,23 Nm
2 2 1440
n
m
n
P U I
PM
n
(4.1)

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 30
5 PARAMETRIRANJE POGONA ZA PRIMER
TRANSPORTNEGA TRAKU
Pridobljeno znanje o celotnem pogonu in SVCM uporabimo za parametriranje
transportnega traku.
Naša naloga je bila:
- izbira motorja, da se bo motor vrtel z želenimi vrtljaji,
- parametriranje SVCM za delovanje tekočega traku pri različnih delovnih točkah,
- parametriranje SVCM za delovanje tekočega traku pri ciklu na sliki 5.18.
5.1 Izračun podatkov pogona
Slika 5.1 Pogon tekočega traku [7].
Izračun moči pogona:
Podatki :
v= 0.8 km/h =0.222 m/s
Izračun sile traku [7]:
B Btraku T R R
traku
( )2 2
300,33 9,81(2023,5 ) 0,033 9,81 9,81 100 6636,4Nm
2
m mF µ g m µ g m
F
(5.1)

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 31
kjer je :
µR – konstanta trenja rotirajočih delov
µT – konstanta trenja drsečih delov
m – masa bremena
mB – masa traku
mR – masa valjev
Izračun moči pogona:
traku traku 6636,4 0,222 1473,28WP F v (5.2)
Izračun moči in vrtilnega momenta motorja:
trakum
prenosov
1473,281841,6W
0,80
PP
(5.3)
mp b
60 1841,6 6013,52Nm
2 2 1300
PM M
n
(5.4)
Izračun moči za vrtljaje motorja 780 min-1
m
7801841,6 1104,96W
1300P
(5.5)
Izračun frekvence za delovne točke in cikel pogona
Za parametriranje je bilo potrebno izračunat frekvenco, da dobimo želene vrtljaje in s tem
povezano hitrost tekočega traku. Frekvenco smo izračunali za vsako delovno točko posebej
in jo nastavljali med obratovanjem s pomočjo SVCM in programom DM.
Izračun frekvence temelji na upoštevanju podobnih trikotnikov prikazanih na sliki 5.2.
Merilo za vrtljaje na sliki 5.2 se zaradi preglednosti začne pri 1000 min-1
.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 32
Slika 5.2 Prikaz podobnih trikotnikov.
s n bn1 ž s n
ž 1 b n
n n MMn n n n
n n M M
(5.6)
1 ž1 ž;
60 60
n p n pf f
(5.7)
sž ž ž ž 1( )f f f n f f f (5.8)
Kjer so:
ns - sinhronski vrtljaji,
nn- nazivni vrtljaji,
nž -želeni vrtljaji,
Mn – nazivni moment,
Mb - moment bremena,
n1 – vrtljaji pri Mb označeni na sliki 5.2,

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 33
f1 – frekvenca za vrtljaje n1,
fž – frekvenca za vrtljaje nž,
fsž – frekvenca, ki jo nastavimo, da ob obremenitvi Mb dobimo vrtljaje nž.
Izmerili smo momentno karakteristiko motorja v odvisnosti od vrtljajev. S pomočjo
karakteristike smo določili Mn in nn. Te podatke uporabimo v enačbi 5.6.
Izmerjeni podatki :
Tabela 5.1 Izmerjeni podatki ASM
M (Nm) n (min-1
)
5 1460
10 1418
15 (Mn) 1368 (nn)
17,5 1336
20 1283
Slika 5.3 Del izmerjene momentne karakteristike motorja.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 34
Primer izračuna frekvence za prvo delovno točko :
S pomočjo enačb 5.6, 5.7 in 5.8 bomo izračunali frekvenco za prvo delovno točko.
Parametri:
Mn = 15 Nm
Mb =14 Nm
nž = 1300 min-1
nn= 1368 min-1
1b1 ž s n
n
141300 1500 1368 1176,8min
15
Mn n n n
M
(5. 9)
11
1176,8 239,22
60 60
n pf Hz
(5.10)
žž
1300 243,33
60 60
n pf Hz
(5.11)
sž ž ( ) 43,33 43,33 39,22 47,43f f f n Hz (5.12)
S pomočjo enačbe 5.9 lahko izračunamo n1, kot je prikazano na sliki 5.2. Pri čemer je n
razlika med nž in n1.
Določitev začetne napetosti motorja
Tabela 5.2 Izmerjeni moment stoječega motorja za različne začetne napetosti.
Začetna napetost (V) Mb (Nm)
12,7 2
20 5,2
30 11
40 19
50 21,5

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 35
Tabela 5.2 prikazuje izmerjene začetne momente motorja za različne vrednosti začetne
napetosti U0. Napetost U0 je prikazana na sliki 5.4.
Slika 5.4 Potek napetosti.
Na sliki 5.5 se vidi, da se v primeru U01 motor zavrti šele pri frekvenci f1, medtem ko se pri
nastavljeni napetosti U02 zavrti že pri najnižjih frekvencah.
Slika 5.5 Različne začetne napetosti U0.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 36
V praksi nastavljamo začetno napetost zato, da je že pri vrtljajih 0 moment motorja večji
od momenta traku m trakuM M .
5.2 Analiza pogona pri različnih delovnih točkah
Preizkusili bomo različne delovne točke. Delovnim točkam bomo spreminjali vrtljaje in
moment bremena ter opazovali potek napetosti, toka in frekvence. Prav tako je bilo
potrebno za vsako delovno točko izračunat frekvenco s pomočjo enačb 5.6, 5.7 in 5.8.
Prva delovna točka
Podatki delovne točke :
Mb = 14 Nm
n = 1300 min-1
Delavni točki samo nastavljali sledeče parametre.
a) Postavljeni parametri preizkusa
- Čas pospeševanja 1 sekunda.
- Čas zaviranja 1 sekunda.
- Nastavljena frekvenca 47,43 Hz.
- Tokovna in momenta omejitev 140%.
Na sliki 5.6 vidimo potek napetosti. Na poteku se vidi začetna napetost, ki v našem
primeru znaša 40 V. Začetno napetost smo nastavili, da motor razvija dovolj velik moment
že pri najnižji frekvenci. Iz tokovnega poteka na grafu 5.8 vidimo, da pride do delovanja
tokovnega limita, zaradi prevelikega tokovnega sunka. Iz poteka hitrosti je vidno, da se je
pogon zaustavil praktično hipoma. Zaradi velikih mehanskih obremenitev je taka
nastavitev parametrov neugodna za naš pogon.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 37
b) Postavljeni parametri preizkusa
- Čas pospeševanja 4 sekunde.
- Čas zaviranja 4 sekunde.
- Nastavljena frekvenca 47,43 Hz.
- Tokovna in momenta omejitev 140%.
Potek napetosti na grafu 5.6 je v skladu s pričakovanjem. Zaradi začetne napetosti imamo
velik začetni tok, ki drži navor bremena. Prav tako vidimo na grafu 5.8, da je sedaj tokovni
potek ugodnejši, kajti ne pride do velikih tokovnih sunkov in posledično do delovanja
tokovnega limita. Na grafu 5.9 se vidi, da referenčno vrednost hitrosti doseže v skladu z
nastavitvami.
c) Postavljeni parametri preizkusa
- Čas pospeševanja 4 s.
- Čas zaviranja 4 s.
- Čas začetne zaokrožitve 2 s.
- Čas končne zaokrožitve 2s.
- Nastavljena frekvenca 47,43 Hz.
- Tokovna in momenta omejitev 140%.
Iz poteka toka na grafu 5.8 se vidi, da je prišlo do najmanjših tokovnih sunkov. Poteka
napetosti in frekvence na grafu 5.6 in 5.7 sta v skladu s pričakovanjem. Iz poteka hitrosti
na grafu 5.9 lahko vidimo, da se želeni vrtljaji razlikuje le za 5 min-1
od izmerjenih. Prav
tako se vidi, da je bila sprememba vrtljajev najpočasnejša.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 38
Slika 5.6 Časovni poteki napetosti.
Slika 5.7 Časovni poteki frekvence.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 39
Slika 5.8 Časovni poteki toka.
Slika 5.9 Časovni poteki vrtljajev.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 40
Druga delovna točka
Podatki delovne točke :
Mb = 7 Nm
n = 1300 min-1
d) Postavljeni parametri preizkusa
- Čas pospeševanja 4 sekunde.
- Čas zaviranja 4 sekunde.
- Nastavljena frekvenca 45,42 Hz.
- Tokovna in momenta omejitev 140%.
Napetost in frekvenca na slikah 5.10 in 5.11 potekata v skladu s pričakovanjem, kar
pomeni, da linearno naraščata do nazivne vrednosti. Na sliki 5.12 vidimo, da tok naraste do
vrednosti 4,3 A, nato ob vklopu motorja pade na polovično vrednost. Iz poteka hitrosti na
grafu 5.13 lahko vidimo, da se želeni vrtljaji razlikuje le za 5 min-1
od izmerjenih.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 41
Slika 5.10 Časovni potek napetosti.
Slika 5.11 Časovni potek frekvence.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 42
Slika 5.12 Časovni potek toka.
Slika 5.13 Časovni potek vrtljajev.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 43
Tretja delovna točka
Podatki delovne točke :
Mb = 7 Nm
n = 780 min-1
e) Postavljeni parametri preizkusa
- Čas pospeševanja 4 sekunde.
- Čas zaviranja 4 sekunde.
- Nastavljena frekvenca 27,92 Hz.
- Tokovna in momenta omejitev 140%.
Napetost in frekvenca na slikah 5.14 in 5.15 potekata v skladu s pričakovanjem, kar
pomeni, da linearno naraščata do nazivne vrednosti. Prav tako ob vklopu motorja pade tok
na polovično vrednost in ponovna naraste ob izklopu. Iz poteka hitrosti na grafu 5.17 lahko
vidimo, da se želeni vrtljaji razlikuje le za 6 min-1
od izmerjenih.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 44
Slika 5.14 Časovni potek napetosti.
Slika 5.15 Časovni potek frekvence.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 45
Slika 5.16 Časovni potek toka.
Slika 5.17 Časovni potek vrtljajev.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 46
5.3 Nastavitev parametrov za želen cikel obratovanja pogona
Pogon se vklopi po 5 sekundah in se ob vklopu zavrti na 1300 min-1
. S tem doseže pogon
tekočega traku hitrost premikanja 0,8 km/h. Vrtljaje drži konstantne 30 sekund, nato motor
zavira na 780 min-1
in doseže hitrost premikanja 0,5 km/h. Po 15 sekundah vrtljaji ponovno
narastejo na 1300 min-1
. Vrtljaje drži konstantne 20 sekund in jih nato ponovno zniža na
780 min-1
, na kar se pogon po 10 sekundah počasi ustavi. Potrebna moč za premikanje
traku s hitrostjo 0,8 km/h je 1841,6W in s hitrostjo 0,5km/h je 1104,96W . Celoten cikel
traja 75 sekund in je prikazan na sliki 5.18.
Slika 5.18 Cikel pogona.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 47
Preden smo izvedli cikel zapisan s SF, smo morali v parametriranju z uporabo pred
nastavljenih korakov nastavit PMU način krmiljenja. Nato smo parameter P443 nastavili
na vrednost KK45. Sedaj smo lahko z uporabo SF spreminjali frekvenco s parametrom
P405. Posledično zaradi spreminjanje frekvence so se spreminjali vrtljaji. Prav tako smo
nastavljali parametre za pospeševanje in pojemanje hitrosti. SF za izvedbo cikla s slike
5.18 se vidi na sliki 5.19.
Slika 5.19 SF za izvedbo cikla s slike 5.18.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 48
Slika 5.20 Časovni potek napetosti.
Slika 5.21 Časovni potek frekvence.
Poteka napetosti in frekvence na slikah 5.20 in 5.21 sta v skladu z nastavljenimi parametri.
Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 49
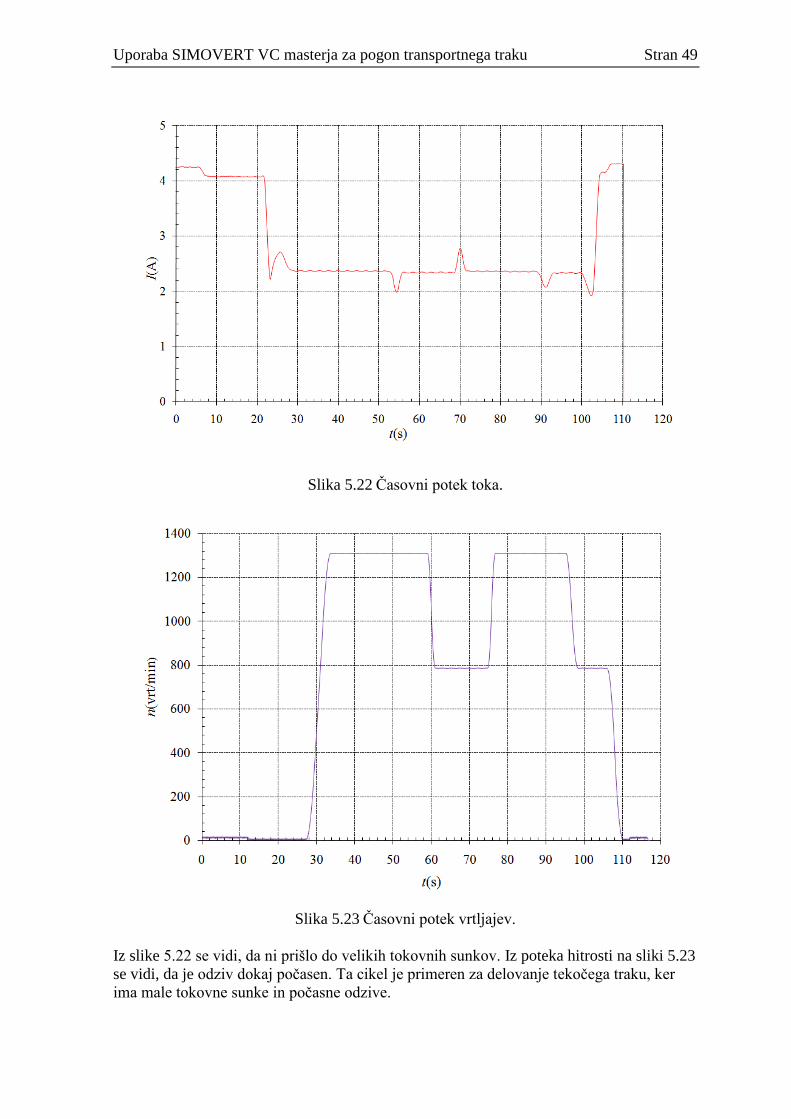
Slika 5.22 Časovni potek toka.
Slika 5.23 Časovni potek vrtljajev.
Iz slike 5.22 se vidi, da ni prišlo do velikih tokovnih sunkov. Iz poteka hitrosti na sliki 5.23
se vidi, da je odziv dokaj počasen. Ta cikel je primeren za delovanje tekočega traku, ker
ima male tokovne sunke in počasne odzive.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 50
6 SKLEP
Frekvenčni pretvornik SVCM se nastavlja s pomočjo parametrov. Ker je tabela parametrov
zelo obsežna in je potrebno vložit veliko časa, da bi spoznali parametre, je priporočljivo,
da predhodno ugotovimo in izpišemo najpomembnejše parametre. Vnos parametrov lahko
izvedemo preko PMU, vendar je postopek zahteven in nepregleden. Zato je boljša opcija
vnos parametrov s pomočjo programa DM, ki ima dva načina za vnos parametrov:
- direkten vnos parametrov v tabelo parametrov, ki je še vedno zahteven zaradi
velike količine parametrov,
- vnos s prednastavljanjemi koraki, ki nam olajša delo, saj ima uporabniku prijazen
grafični vmesnik.
Iz mojih izkušenj je najustreznejši način vnos s prednastavljenimi koraki in nato po potrebi
spreminjanje posameznih parametrov z direktnim vnosom v tabelo parametrov.
Za ustrezno parametriranje pogona sem moral poznati delovanje le tega. Posebej važne so
bile karakteristike delovanja pogonskega stroja in bremena. Delovanje pogona smo
preizkušali z različno nastavljenimi parametri in glede na časovne odzive sem skušal
ugotovit najprimernejše parametre za primerno delovanje tekočega traku. Iz časovnih
potekov sem ugotovil, da je najugodnejši pogon, če se vrtljaji počasi spuščajo in dvigajo.
Če smo vrtljaje spreminjali prehitro in skoraj stopničasto, je prišlo do prevelikega
tokovnega sunka, kot je prikazano na sliki 5.8.
Ob koncu lahko zaključim, da je pomembno ustrezno parametriranje pogona. Ker nam to
lahko prinese dolgo življenjsko dobo in manj okvar pogona.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 51
7 LITERATURA
[1] M. Trlep, Električni pogoni, skripta - zapiski predavanj.
[2] I. Zagradišnik, B. Slemnik, Električni rotacijski stroji, 4. izd., Fakulteta za
elektrotehniko, računalništvo in informatiko, Maribor, 2005.
[3] Siemens AG, http://www.sea.siemens.com/step/default.html.
[4] http://www.electrical-res.com/EX/10-18-20/Induction.Motor.cutaway.jpg
[5] http://www.lu-rogaska.si/f/docs/E-gradiva/ELEKTRICNI_STROJI_1.pdf
[6] Marko Jesenik, Mladen Trlep, Električni pogoni -laboratorijske vaje.
[7] http://www.berkelbelting.nl/pdf/berkelbelting_berekeningen-transport.pdf

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 52
8 PRILOGE
8.1 Seznam slik
Slika 2.1 Asinhronski motor [4]. ........................................................................................... 2 Slika 2.2 Slika tri faznega asinhronskega motorja s kratkostično kletko [2]. ....................... 3 Slika 2.3 Zagon zvezda/trikot [1]. ......................................................................................... 4 Slika 2.4 Preklop zvezde v trikot[1]. ..................................................................................... 5 Slika 2.5 Spreminjanje n z dodajanjem Rd [1]. ...................................................................... 6
Slika 2.6 Spreminjanje n s spreminjanjem Us [1]. ................................................................. 7 Slika 2.7 Karakteristika n pri spremembi fs [1]. ..................................................................... 8
Slika 2.8 Karakteristika n pri spremembi fs [1]. ..................................................................... 9 Slika 3.1 Simovert VC master. ............................................................................................ 10 Slika 3.2 PMU. .................................................................................................................... 11 Slika 3.3 DM. ...................................................................................................................... 12 Slika 3.4 Del tabele parametrov. ......................................................................................... 15
Slika 3.5 Indeks parametra. ................................................................................................. 16
Slika 3.6 Vnos vrednosti parametra. .................................................................................... 16 Slika 3.7 Vnos vrednosti parametra. .................................................................................... 17 Slika 3.8 Prikaz enot. ........................................................................................................... 17
Slika 3.9 Nastavljanje tipa frekvenčnega pretvornika. ........................................................ 18 Slika 3.10 Nastavljanje parametrov motorja ....................................................................... 19
Slika 3.11 Nastavljanje tipa merilnika vrtljajev. ................................................................. 20 Slika 3.12 Nastavljanje načina hlajenja motorja. ................................................................ 20
Slika 3.13 Nastavljanje način krmiljenja motorja. .............................................................. 21 Slika 3.14 Nastavljanje časovnega poteka pogona. ............................................................. 22 Slika 3.15 Nastavitev tokovnih omejitev in začetne napetosti. ........................................... 23
Slika 3.16 Okno za potrditev konfiguracije. ........................................................................ 24 Slika 3.17 Grafični vmesnik ................................................................................................ 25
Slika 3.18 Časovni poteki v grafičnem vmesniku. .............................................................. 25 Slika 3.19 Cikel pogona v urejevalniku »script datotek«. ................................................... 27 Slika 4.1 Slika električnega pogona. ................................................................................... 28
Slika 5.1 Pogon tekočega traku [7]. ..................................................................................... 30 Slika 5.2 Prikaz podobnih trikotnikov. ................................................................................ 32 Slika 5.3 Del izmerjene momentne karakteristike motorja. ................................................ 33
Slika 5.4 Potek napetosti. .................................................................................................... 35 Slika 5.5 Različne začetne napetosti U0. ............................................................................. 35 Slika 5.6 Časovni poteki napetosti. ..................................................................................... 38 Slika 5.7 Časovni poteki frekvence. .................................................................................... 38 Slika 5.8 Časovni poteki toka. ............................................................................................. 39
Slika 5.9 Časovni poteki vrtljajev........................................................................................ 39 Slika 5.10 Časovni potek napetosti. .................................................................................... 41 Slika 5.11 Časovni potek frekvence. ................................................................................... 41 Slika 5.12 Časovni potek toka. ............................................................................................ 42 Slika 5.13 Časovni potek vrtljajev. ..................................................................................... 42 Slika 5.14 Časovni potek napetosti. ................................................................................... 44 Slika 5.15 Časovni potek frekvence. .................................................................................. 44

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 53
Slika 5.16 Časovni potek toka. ............................................................................................ 45
Slika 5.17 Časovni potek vrtljajev. ...................................................................................... 45 Slika 5.18 Cikel pogona. ..................................................................................................... 46 Slika 5.19 SF za izvedbo cikla s slike 5.18. ........................................................................ 47 Slika 5.20 Časovni potek napetosti. .................................................................................... 48 Slika 5.21 Časovni potek frekvence. ................................................................................... 48
Slika 5.22 Časovni potek toka. ............................................................................................ 49 Slika 5.23 Časovni potek vrtljajev. ...................................................................................... 49
8.2 Seznam tabel
Tabela 4.1 Nazivni podatki ASM aktivnega bremena. .................................................... 29 Tabela 4.2 Nazivni podatki ASM. ................................................................................... 29 Tabela 5.1 Izmerjeni podatki ASM ................................................................................. 33
Tabela 5.2 Izmerjeni moment stoječega motorja za različne začetne napetosti. ............. 34
8.3 Naslov študenta
Alen Bračič
Greenwiška 12
2000 Maribor
8.4 Kratek življenjepis
Rojen: 18.8.1984 v Mariboru
Šolanje: Končal sem Srednjo elektro-računalniško šolo v Mariboru (SERŠ) in nadaljeval
izobraževanje na Fakulteti za elektrotehniko, računalništvo in informatiko (FERI) v
Mariboru, smer močnostna elektrotehnika visokošolskega strokovnega programa. Sedaj
sem v zaključni fazi izobraževanja, in sicer pri izvedbi diplomskega dela.

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 54

Uporaba SIMOVERT VC masterja za pogon transportnega traku Stran 55





























