Embed Size (px)
Citation preview

1 © 2013 The MathWorks, Inc.
SimscapeTMによる物理モデリング入門
~Simscape + Simシリーズの紹介~
MathWorks Japan
アプリケーションエンジニア
渡辺 修治
●基本ツール
MATLAB®
Simulink®
Stateflow®
●Simシリーズ SimElectronics®
SimMechanicsTM
SimPowerSystemsTM
SimDrivelineTM
SimHydraulics®
●便利ツール
Simulink CoderTM
Simulink Control DesignTM
Simulink Design OptimizationTM
Simulink 3D AnimationTM
Parallel Computing ToolboxTM
2
パワーウィンドウ
障害物検知によるパワーウィンドウ昇降制御
3
1 はじめに
1
はじめに
2
物理
モデリング
3
アドバンスド
トピック
6
まとめ
4
最新
情報
5
公開モデル紹介
4
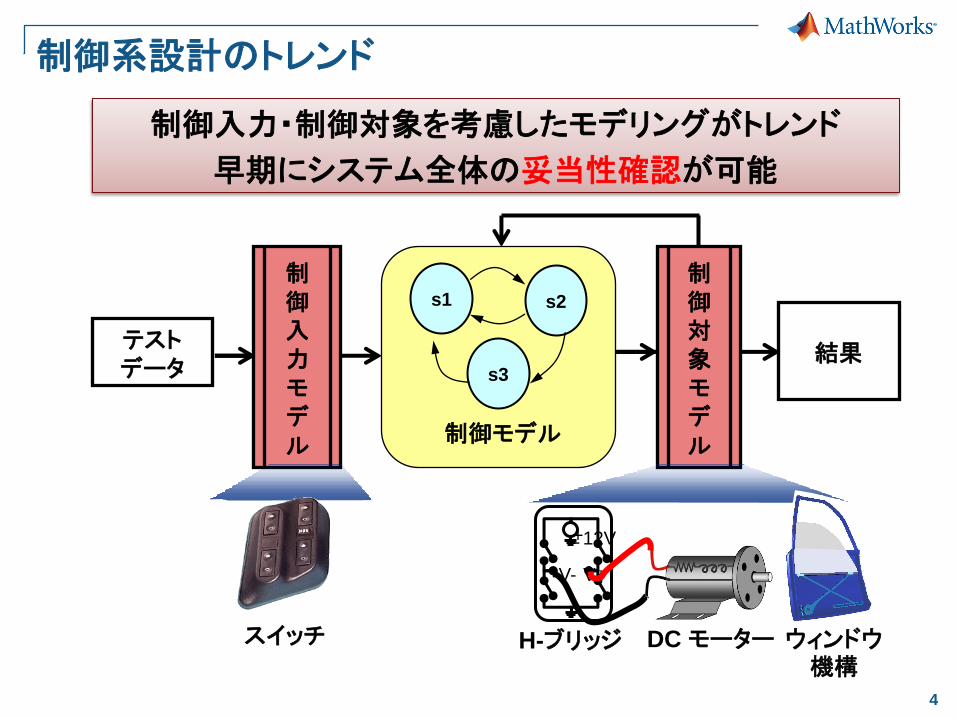
制御系設計のトレンド
制御入力・制御対象を考慮したモデリングがトレンド
早期にシステム全体の妥当性確認が可能
テストデータ
結果
s1 s2
s3
制御モデル
制 御 入 力 モ デ ル
制 御 対 象モデル
スイッチ ウィンドウ機構
+ - 12V
V+ V-
H-ブリッジ DC モーター
5
パワーウィンドウシステム
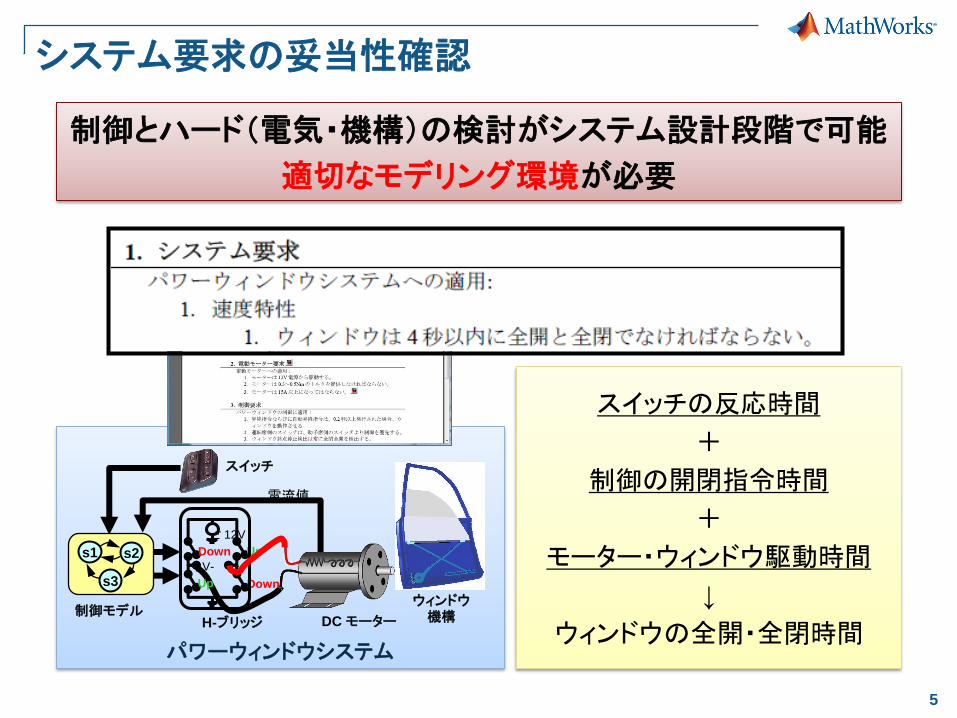
システム要求の妥当性確認
ウィンドウ機構
電流値
+ - 12V
Up
Up Down
Down
V+ V-
H-ブリッジ DC モーター
s1 s2
s3
制御モデル
スイッチ
スイッチの反応時間
+
制御の開閉指令時間
+
モーター・ウィンドウ駆動時間
↓
ウィンドウの全開・全閉時間
制御とハード(電気・機構)の検討がシステム設計段階で可能
適切なモデリング環境が必要
6
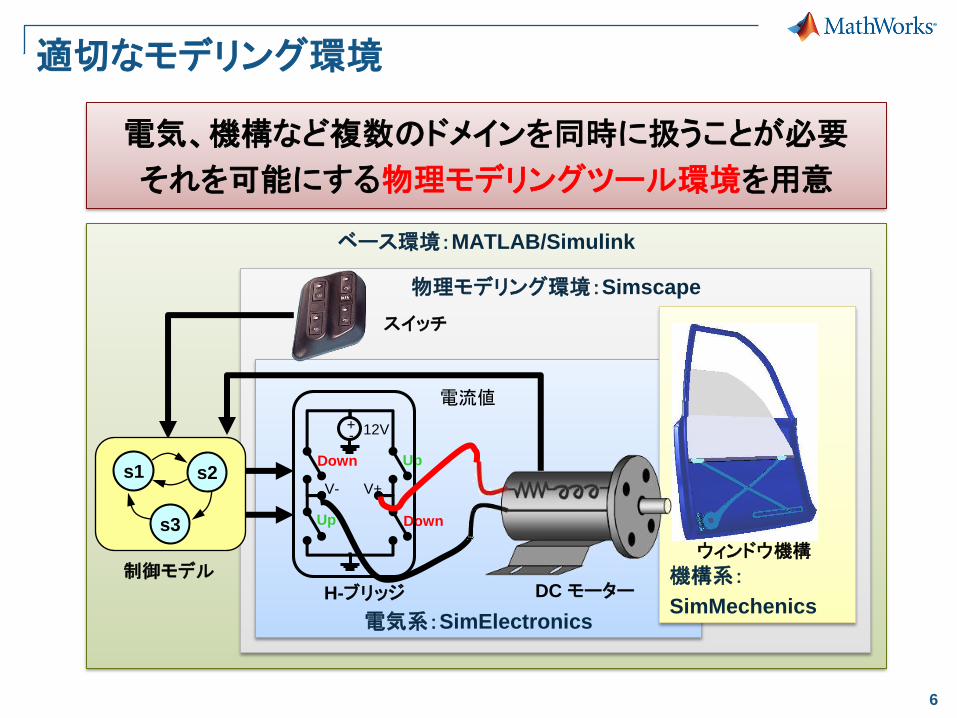
ベース環境:MATLAB/Simulink
適切なモデリング環境
物理モデリング環境:Simscape
電気系:SimElectronics
機構系:
SimMechenics
ウィンドウ機構
電流値
+ - 12V
Up
Up Down
Down
V+ V-
H-ブリッジ DC モーター
s1 s2
s3
制御モデル
スイッチ
電気、機構など複数のドメインを同時に扱うことが必要
それを可能にする物理モデリングツール環境を用意
7
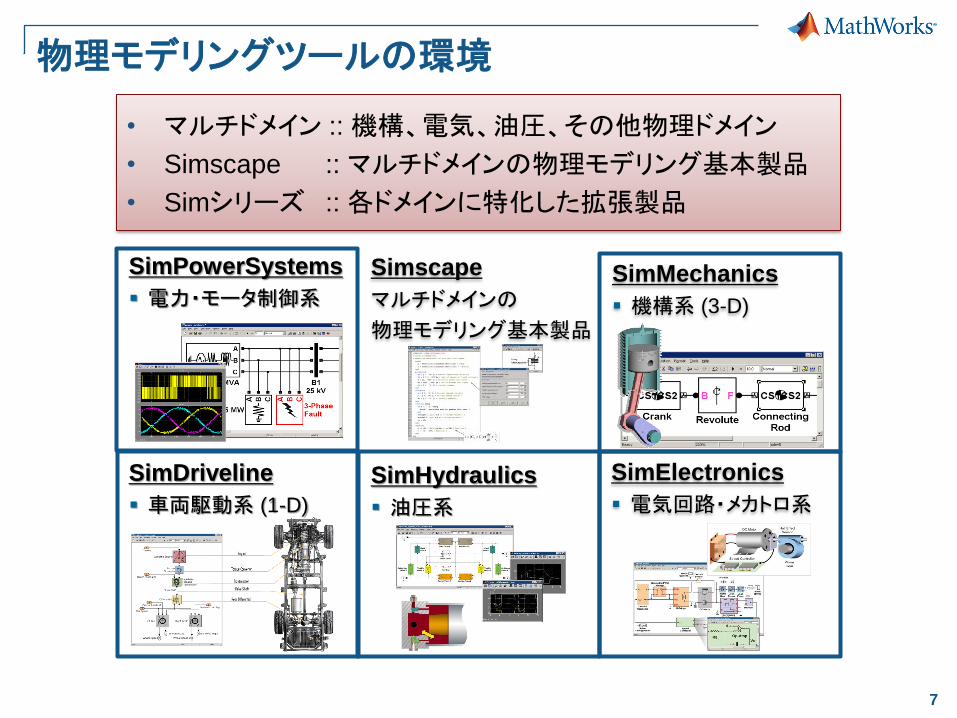
物理モデリングツールの環境
Simscape
マルチドメインの
物理モデリング基本製品
SimPowerSystems
電力・モータ制御系 SimMechanics
機構系 (3-D)
SimDriveline
車両駆動系 (1-D)
SimHydraulics
油圧系
SimElectronics
電気回路・メカトロ系
• マルチドメイン :: 機構、電気、油圧、その他物理ドメイン
• Simscape :: マルチドメインの物理モデリング基本製品
• Simシリーズ :: 各ドメインに特化した拡張製品

8
物理モデリングツールの特徴
開発期間短縮
品質・安全性向上
直感的なモデリング
専用ライブラリ によるモデリング
仕様変更が容易
大規模・複雑な システムに対応
低コスト化
パワーウィンドウを題材にSimscape+Simシリーズを紹介
早期のシステム全体
妥当性確認
適切なモデリング環境
電気や機構など
マルチドメイン
物理モデリングツール
環境で実現
9
2 物理モデリング
2
物理
モデリング
3
アドバンスド
トピック
6
まとめ
1
はじめに
4
最新
情報
5
公開モデル紹介
10
物理モデリングのゴール
パワーウィンドウ要求仕様をベースに妥当性を確認
– 速度特性
ウィンドウは4秒以内に全開と全閉しなければならない
– 障害物検知
上昇動作時、過電流を検知した場合、ウィンドウを下降する
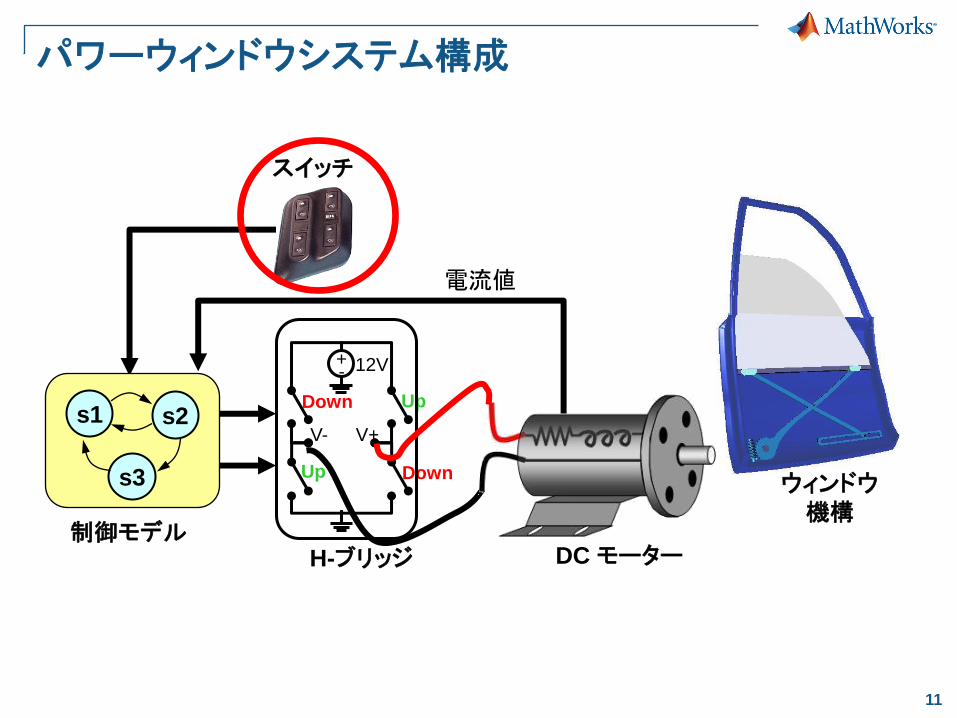
11
ウィンドウ
機構
パワーウィンドウシステム構成
電流値
+ - 12V
Up
Up Down
Down
V+ V-
H-ブリッジ DC モーター
s1 s2
s3
制御モデル
スイッチ
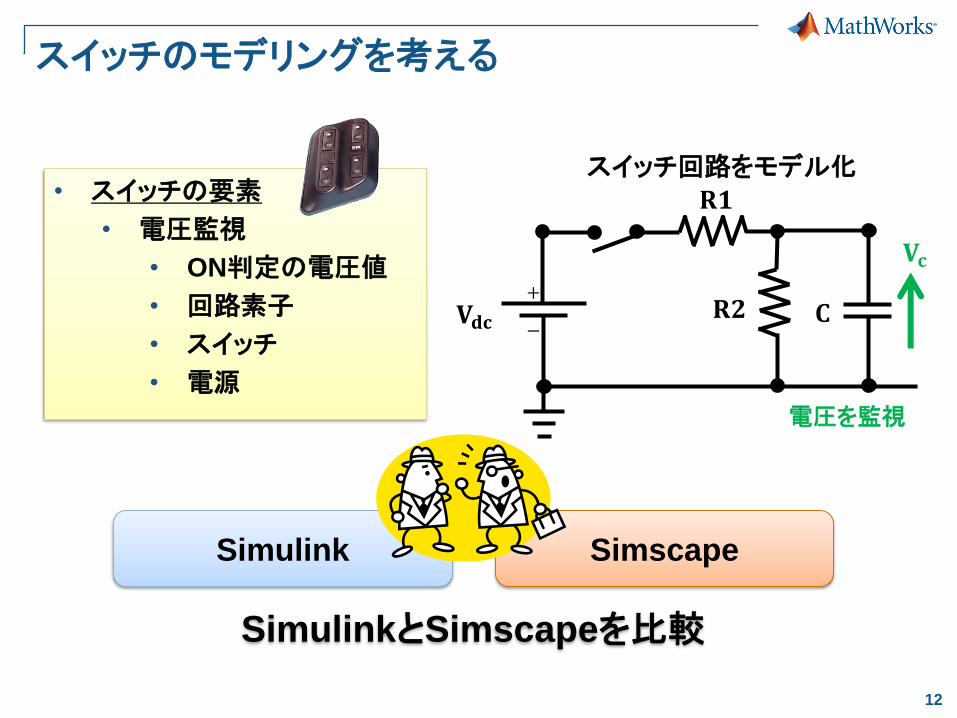
12
スイッチのモデリングを考える
• スイッチの要素
• 電圧監視
• ON判定の電圧値
• 回路素子
• スイッチ
• 電源
スイッチ回路をモデル化
𝐕𝐜
電圧を監視
𝐑𝟏
𝐕𝐝𝐜 𝐂 +
− 𝐑𝟐
Simulink Simscape
SimulinkとSimscapeを比較
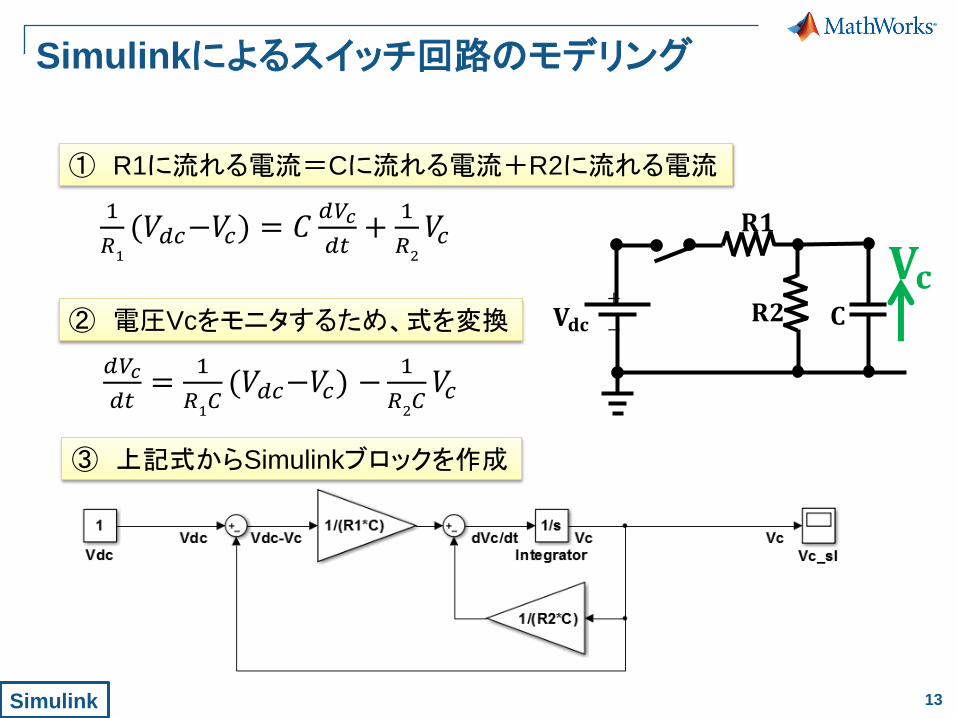
13
Simulinkによるスイッチ回路のモデリング
𝑑𝑉𝑐
𝑑𝑡=
1
𝑅1𝐶(𝑉𝑑𝑐−𝑉𝑐) −
1
𝑅2𝐶𝑉𝑐
1
𝑅1
(𝑉𝑑𝑐−𝑉𝑐) = 𝐶𝑑𝑉𝑐
𝑑𝑡+
1
𝑅2
𝑉𝑐
① R1に流れる電流=Cに流れる電流+R2に流れる電流
② 電圧Vcをモニタするため、式を変換
③ 上記式からSimulinkブロックを作成
𝐑𝟏
𝐕𝐝𝐜 𝐂 +
− 𝐑𝟐
𝐕𝐜
Simulink
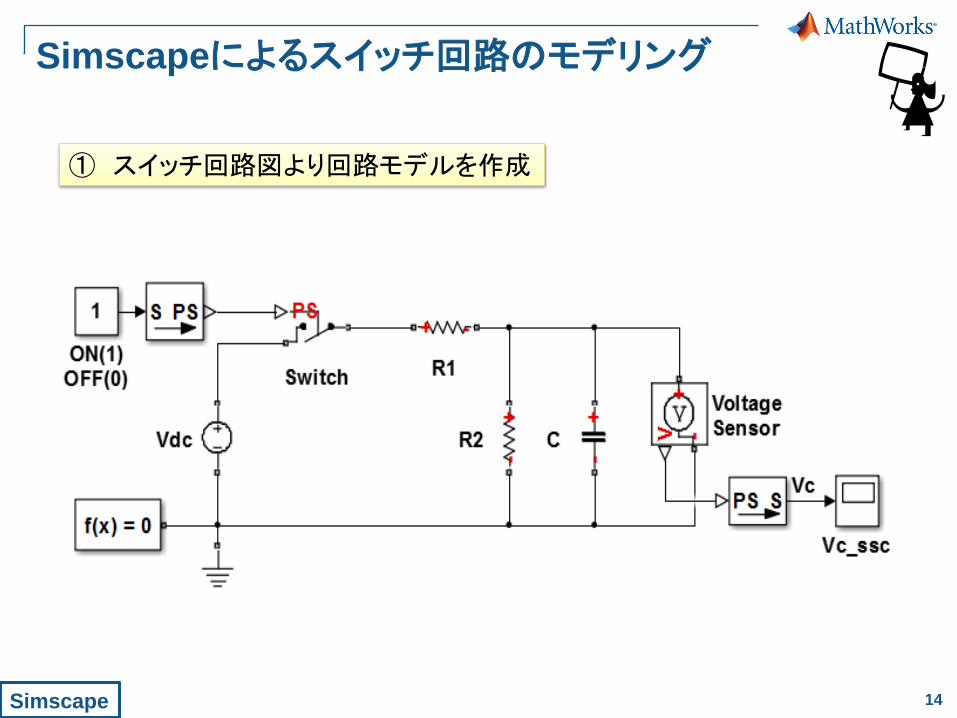
14
Simscapeによるスイッチ回路のモデリング
① スイッチ回路図より回路モデルを作成
𝐑𝟏
𝐕𝐜
𝐕𝐝𝐜 𝐂 +
− 𝐑𝟐
Simscape
16
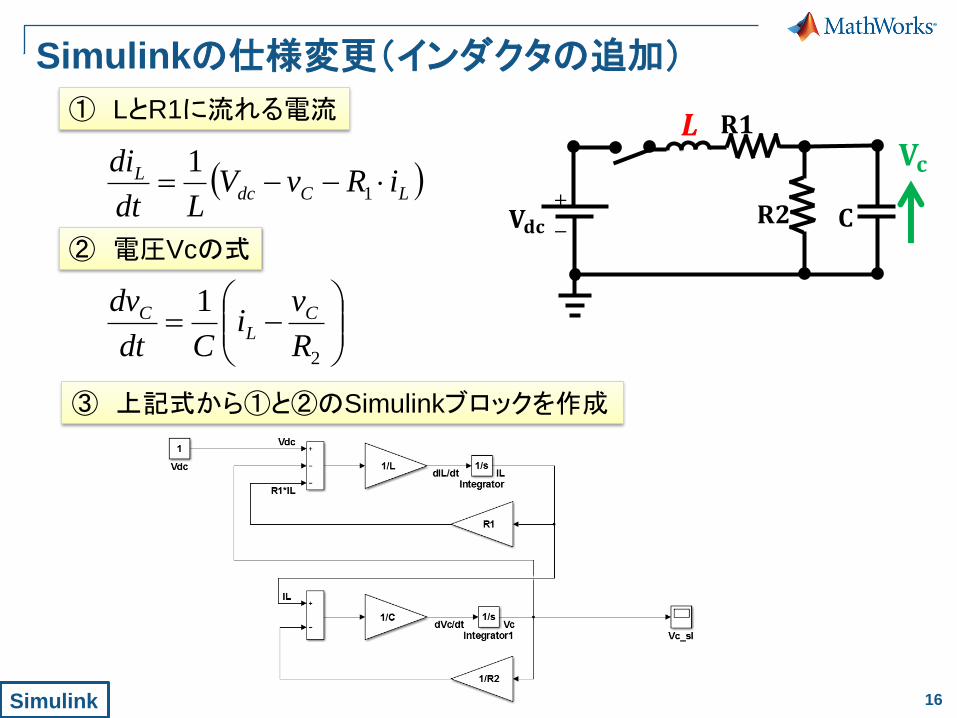
Simulinkの仕様変更(インダクタの追加)
① LとR1に流れる電流
② 電圧Vcの式
𝐑𝟏
𝐕𝐝𝐜 𝐂 +
− 𝐑𝟐
𝐕𝐜 𝑳
LCdcL iRvV
Ldt
di 1
1
2
1
R
vi
Cdt
dv CL
C
③ 上記式から①と②のSimulinkブロックを作成
Simulink
17
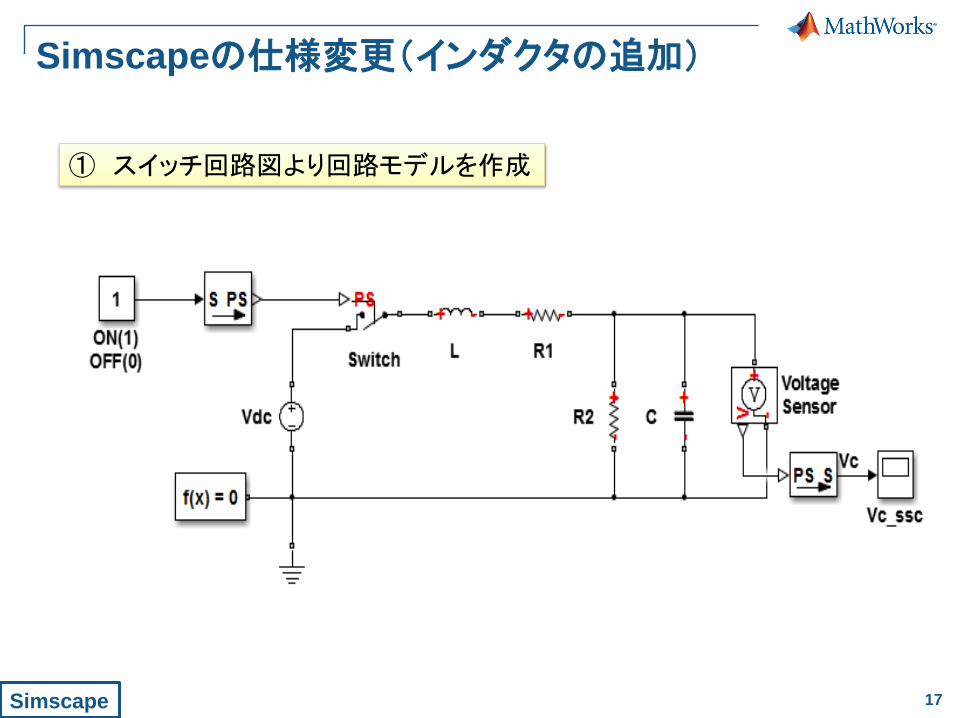
Simscapeの仕様変更(インダクタの追加)
① スイッチ回路図より回路モデルを作成
𝐑𝟏
𝐕𝐝𝐜 𝐂 +
−
𝐑𝟐
𝐕𝐜
𝑳
Simscape
18
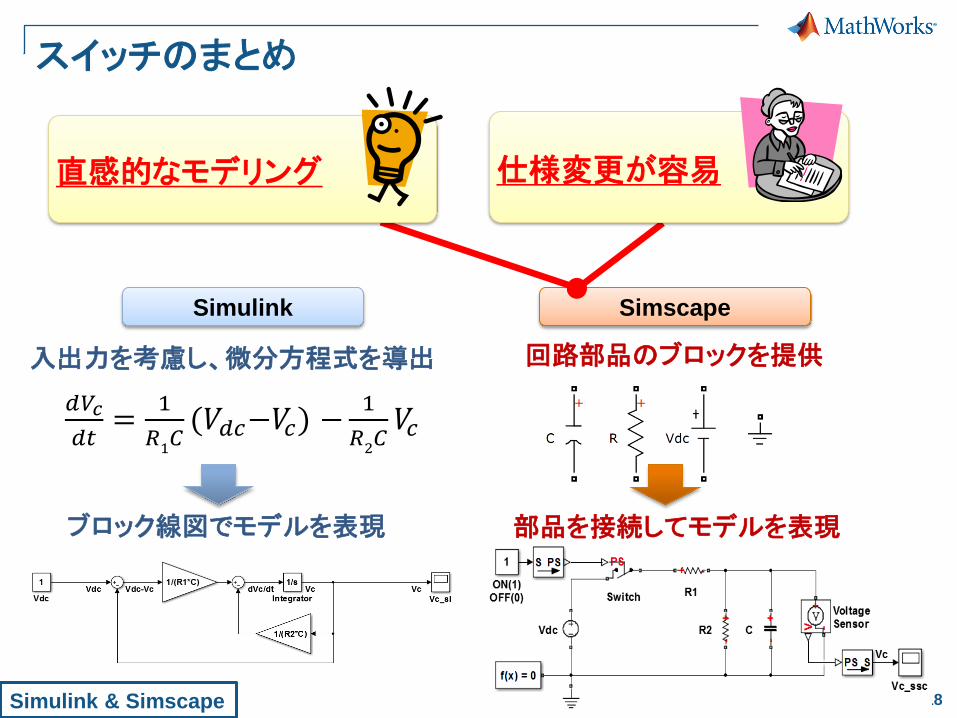
スイッチのまとめ
Simscape Simulink
ブロック線図でモデルを表現
回路部品のブロックを提供
部品を接続してモデルを表現
入出力を考慮し、微分方程式を導出
𝑑𝑉𝑐
𝑑𝑡=
1
𝑅1𝐶(𝑉𝑑𝑐−𝑉𝑐) −
1
𝑅2𝐶𝑉𝑐
直感的なモデリング 仕様変更が容易
Simulink & Simscape
19
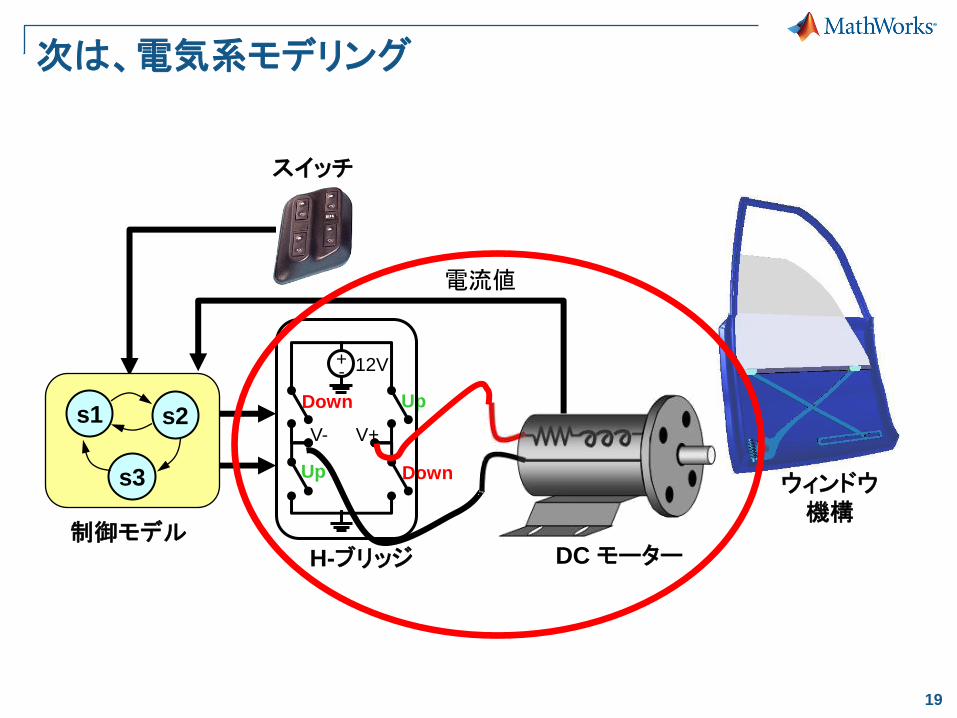
ウィンドウ
機構
次は、電気系モデリング
電流値
+ - 12V
Up
Up Down
Down
V+ V-
H-ブリッジ DC モーター
s1 s2
s3
制御モデル
スイッチ
20
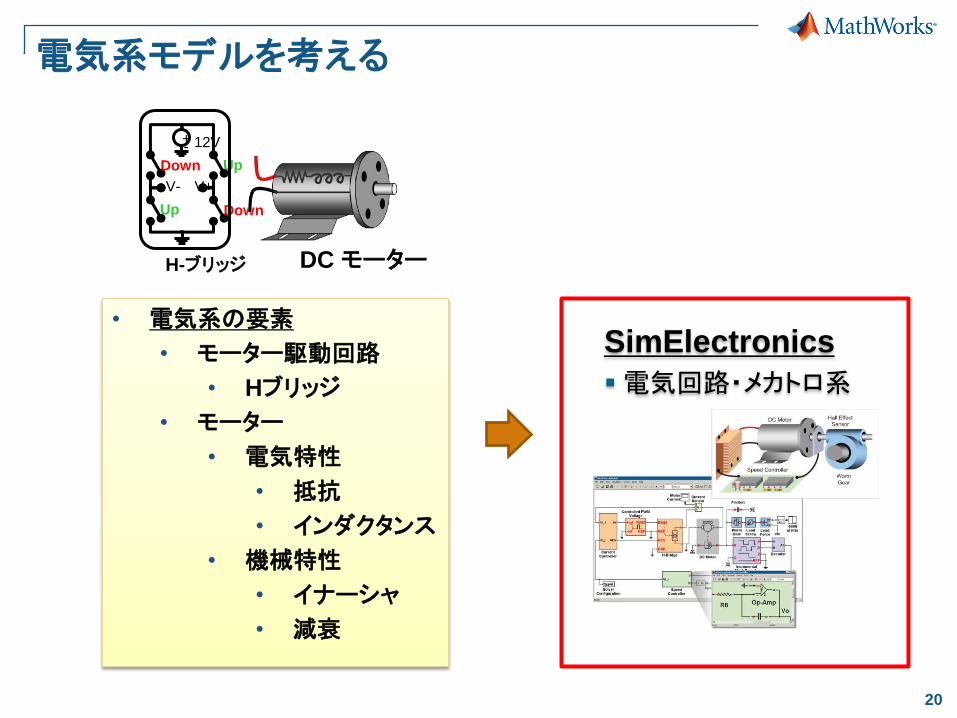
電気系モデルを考える
• 電気系の要素
• モーター駆動回路
• Hブリッジ
• モーター
• 電気特性
• 抵抗
• インダクタンス
• 機械特性
• イナーシャ
• 減衰
+ - 12V
Up
Up Down
Down
V+ V-
H-ブリッジ DC モーター
電気系
機械系
𝑉 = 𝑅𝑖 + 𝐿𝑑𝑖
𝑑𝑡+ 𝐾𝑒𝜔
𝑇 = 𝐾𝑡𝑖 = 𝐼𝑑𝜔
𝑑𝑡+ 𝑐𝜔
回転速度特性
電圧[V]:V、抵抗[Ω]:R、電流[A]:i、
自己インダクタンス[H]:L、
逆起定数[V・s/rad]:Ke、
トルク:T、トルク定数:(Kt=Ke)
慣性モーメント[kg・m2]:I 粘性係数[N・m・rad-1・s]
角速度[rad/s]:(dθ/dt)
SimElectronics
電気回路・メカトロ系
21
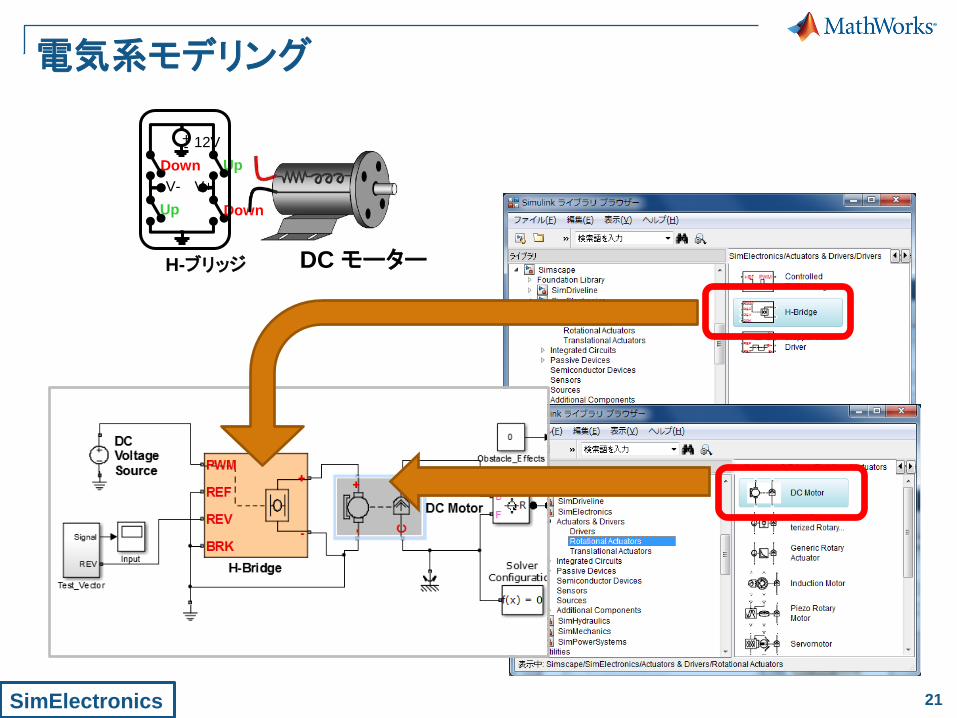
電気系モデリング
+ - 12V
Up
Up Down
Down
V+ V-
H-ブリッジ DC モーター
SimElectronics
電気回路・メカトロ系
SimElectronics
22
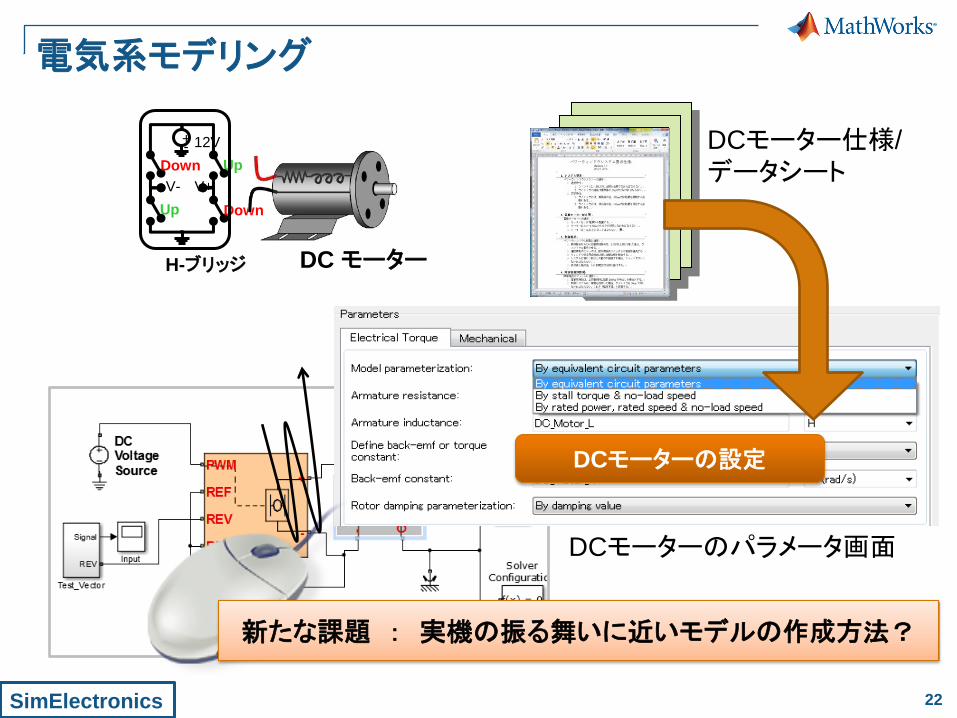
電気系モデリング
+ - 12V
Up
Up Down
Down
V+ V-
H-ブリッジ DC モーター
DCモーターの設定
DCモーターのパラメータ画面
DCモーター仕様/
データシート
SimElectronics
新たな課題 : 実機の振る舞いに近いモデルの作成方法?
23
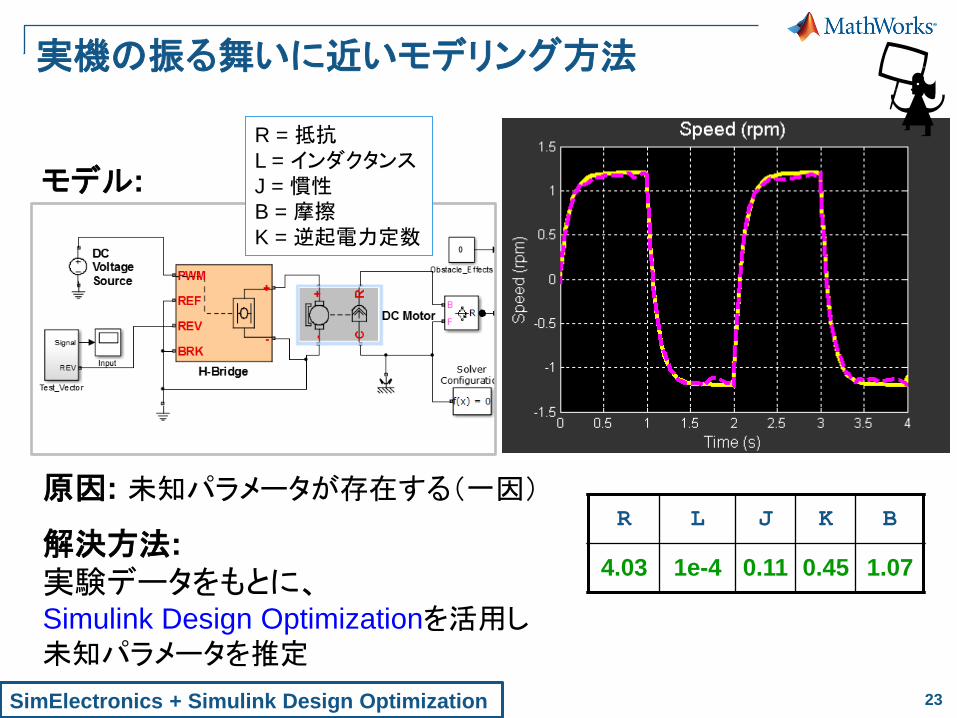
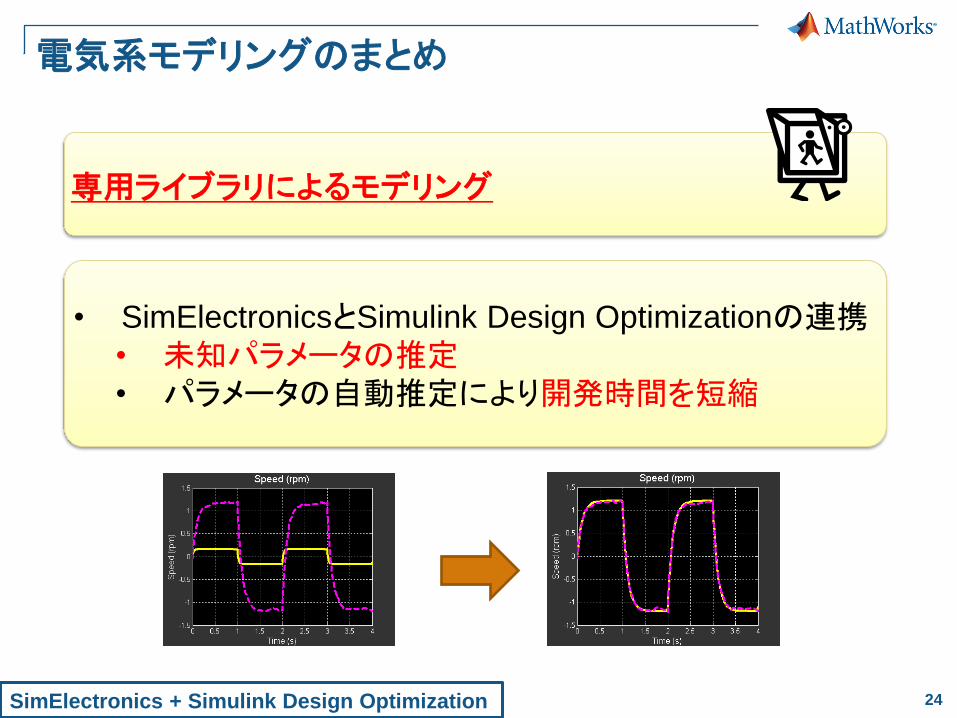
実機の振る舞いに近いモデリング方法
R L J K B
3 0.01 0.01 0.02 0.5
原因: 未知パラメータが存在する(一因)
解決方法:
実験データをもとに、 Simulink Design Optimizationを活用し
未知パラメータを推定
モデル:
R L J K B
4.03 1e-4 0.11 0.45 1.07
R = 抵抗
L = インダクタンス
J = 慣性
B = 摩擦
K = 逆起電力定数
SimElectronics + Simulink Design Optimization
24
電気系モデリングのまとめ
専用ライブラリによるモデリング
• SimElectronicsとSimulink Design Optimizationの連携
• 未知パラメータの推定
• パラメータの自動推定により開発時間を短縮
SimElectronics + Simulink Design Optimization
25
ウィンドウ
機構
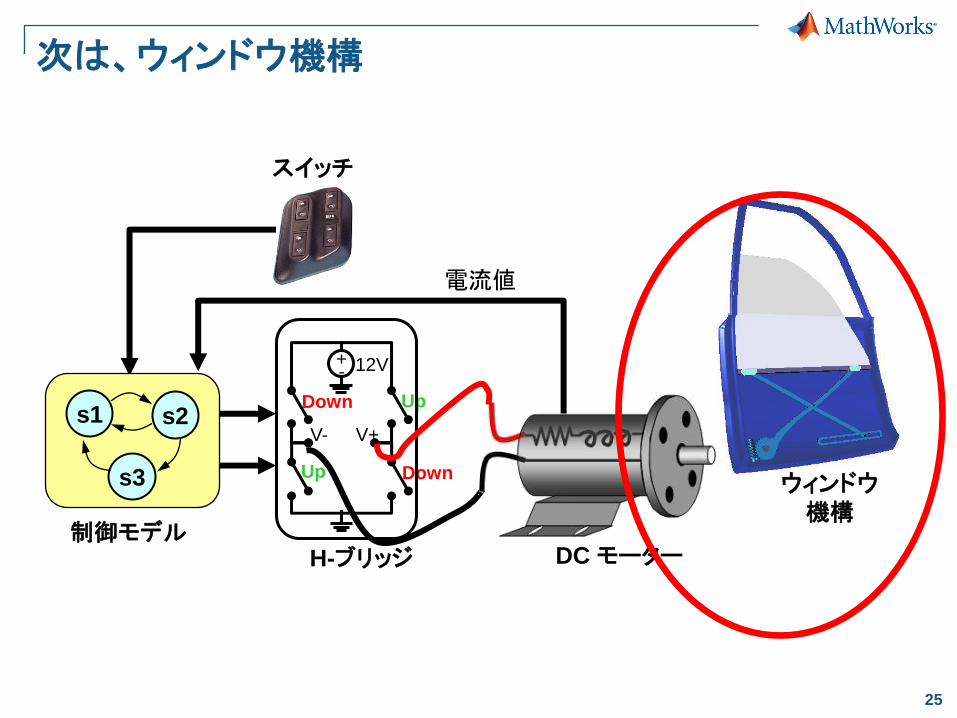
次は、ウィンドウ機構
電流値
+ - 12V
Up
Up Down
Down
V+ V-
H-ブリッジ DC モーター
s1 s2
s3
制御モデル
スイッチ
26
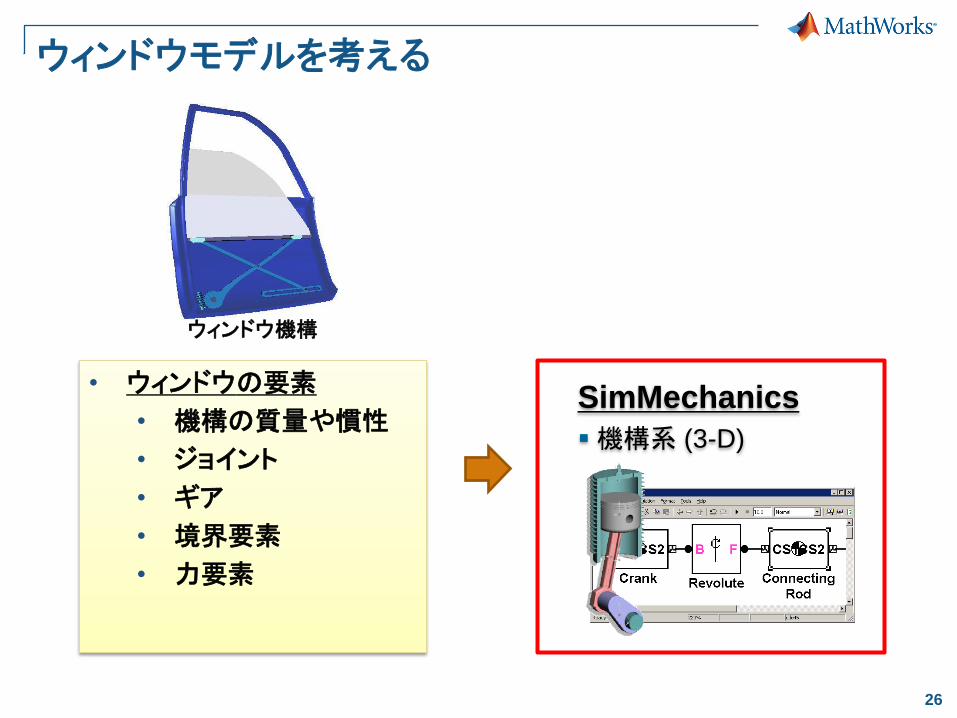
ウィンドウモデルを考える
• ウィンドウの要素
• 機構の質量や慣性
• ジョイント
• ギア
• 境界要素
• 力要素
ウィンドウ機構
θ1
r1 l1
y 0y
1x
SimMechanics
機構系 (3-D)
27
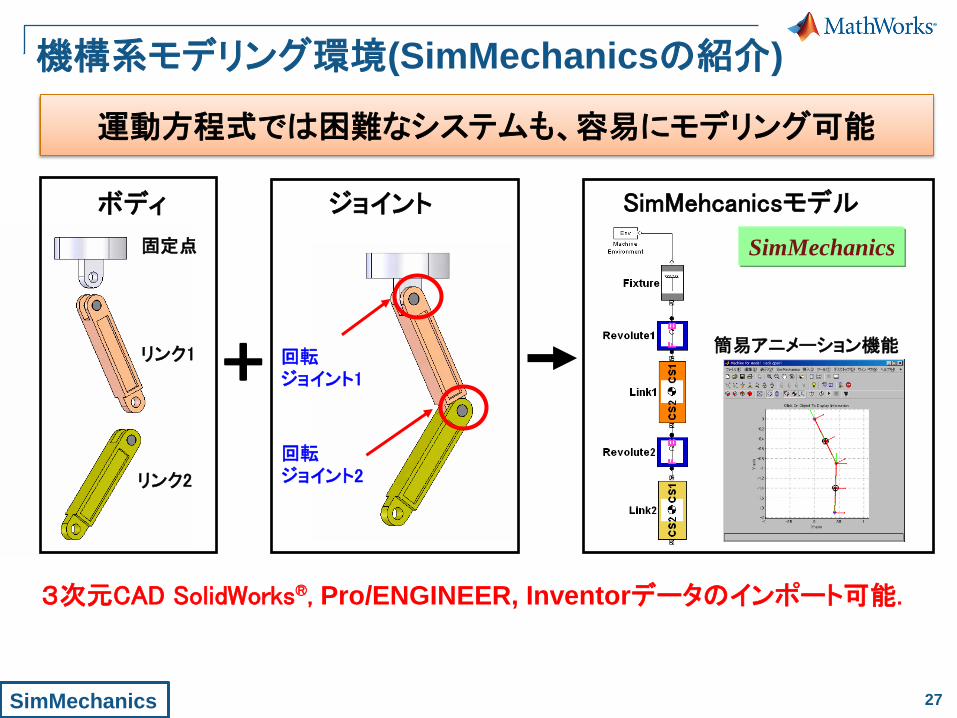
ボディ
固定点
リンク1
リンク2
回転 ジョイント1
回転 ジョイント2
ジョイント
+
SimMehcanicsモデル
簡易アニメーション機能
SimMechanics
機構系モデリング環境(SimMechanicsの紹介)
3次元CAD SolidWorks®, Pro/ENGINEER, Inventorデータのインポート可能.
SimMechanics
運動方程式では困難なシステムも、容易にモデリング可能
28
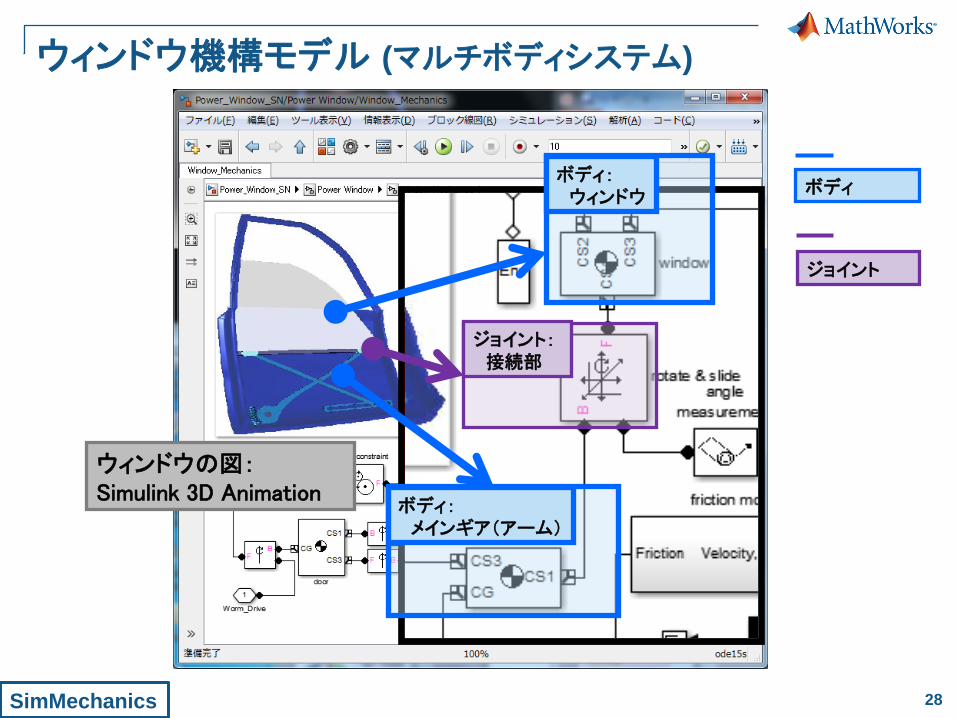
ウィンドウ機構モデル (マルチボディシステム)
ボディ
ジョイント
SimMechanics
ボディ: メインギア(アーム)
ボディ: ウィンドウ
ジョイント: 接続部
ウィンドウの図: Simulink 3D Animation
29
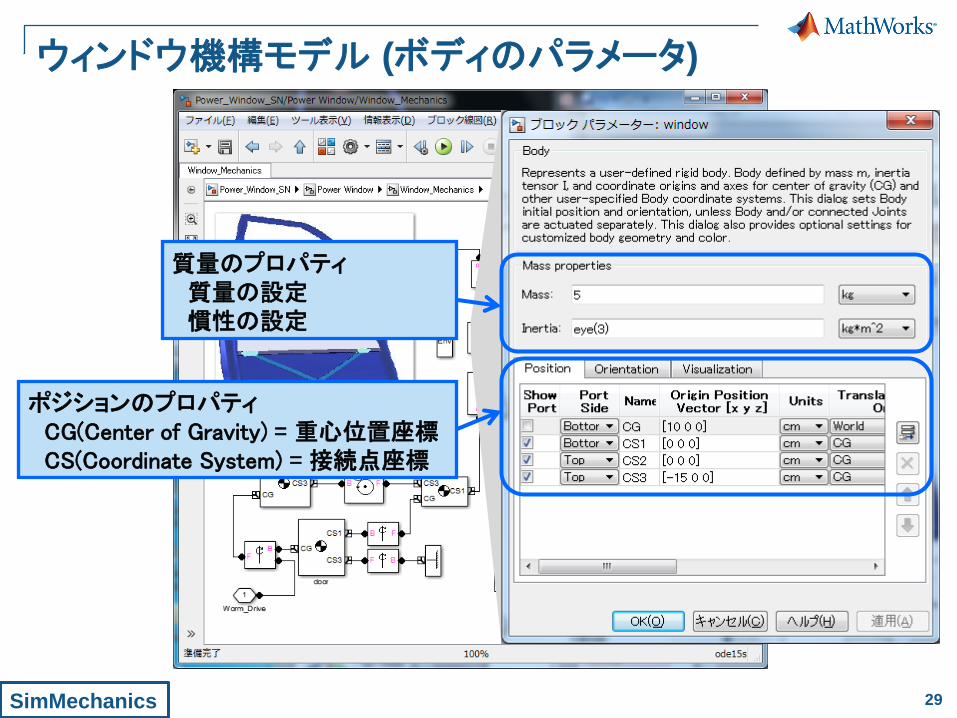
ウィンドウ機構モデル (ボディのパラメータ)
質量のプロパティ 質量の設定 慣性の設定
ポジションのプロパティ CG(Center of Gravity) = 重心位置座標 CS(Coordinate System) = 接続点座標
SimMechanics
30
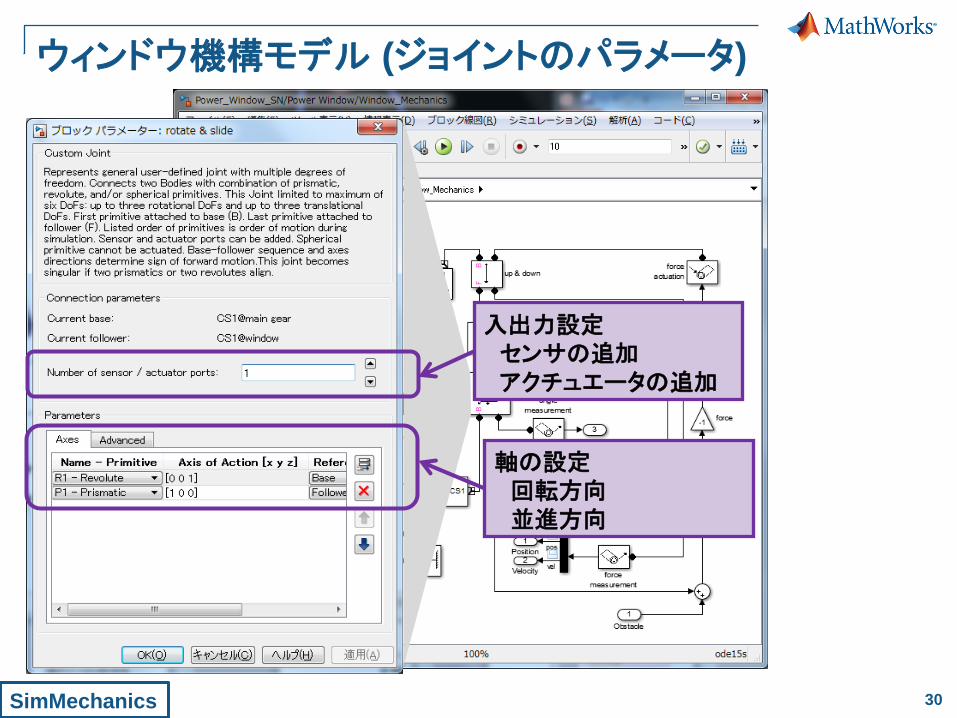
ウィンドウ機構モデル (ジョイントのパラメータ)
入出力設定 センサの追加 アクチュエータの追加
軸の設定 回転方向 並進方向
SimMechanics
31
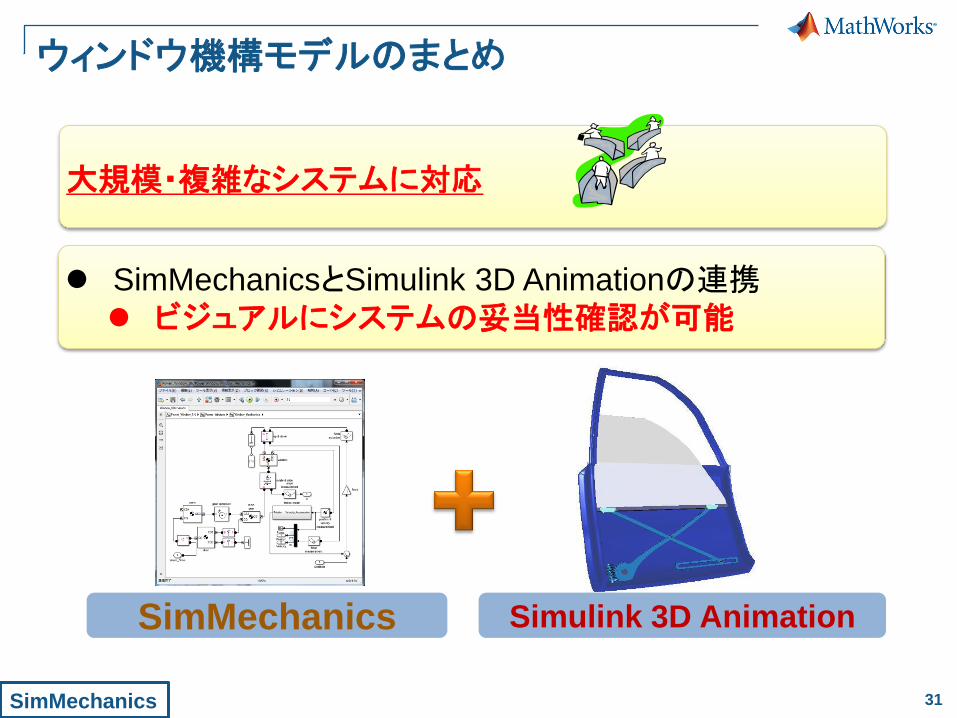
ウィンドウ機構モデルのまとめ
SimMechanics Simulink 3D Animation
大規模・複雑なシステムに対応
SimMechanicsとSimulink 3D Animationの連携
ビジュアルにシステムの妥当性確認が可能
SimMechanics
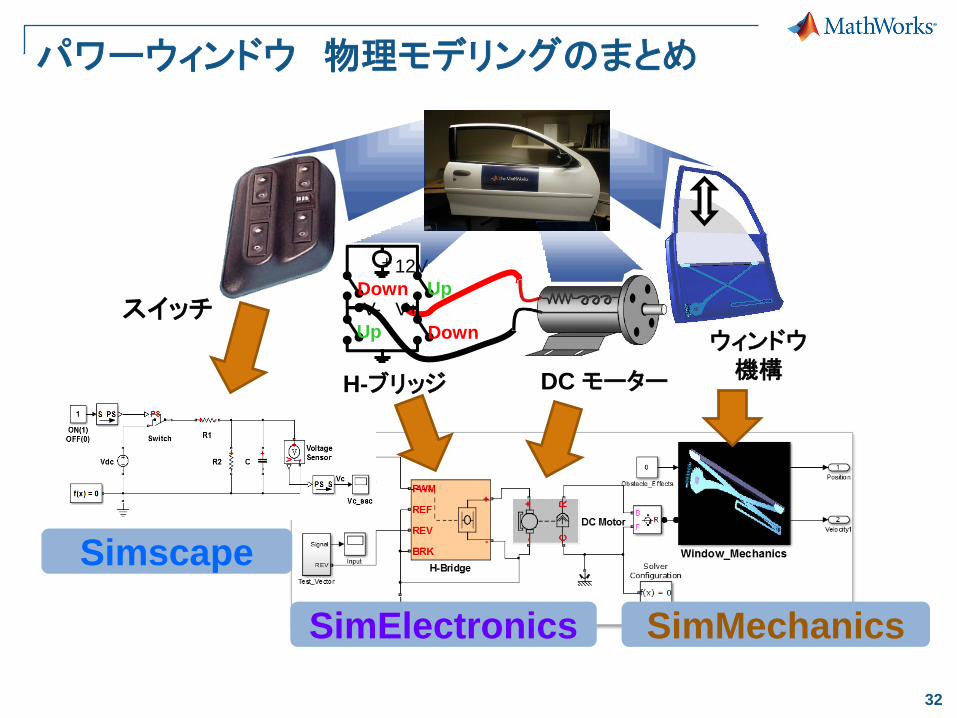
32
パワーウィンドウ 物理モデリングのまとめ
+ - 12V
Up
Up Down
Down V+ V-
H-ブリッジ
ウィンドウ
機構 DC モーター
スイッチ
Simscape
SimElectronics SimMechanics
33
Simulinkによるシミュレーション確認
妥当性の確認
– 速度特性
ウィンドウは4秒以内に全開と全閉しなければならない
– 障害物検知
上昇動作時、過電流を検知した場合、ウィンドウを10cm下降する
スイッチが押されてから、全閉までの時間を確認
障害物検知とウィンドウ下降の確認
• SimscapeとSimシリーズは、Simulink環境で動作し、制御を含むシステム全体の妥当性を確認できる
34
3 アドバンスド トピック
2
物理
モデリング
3
アドバンスド
トピック
6
まとめ
1
はじめに
4
最新
情報
5
公開モデル紹介
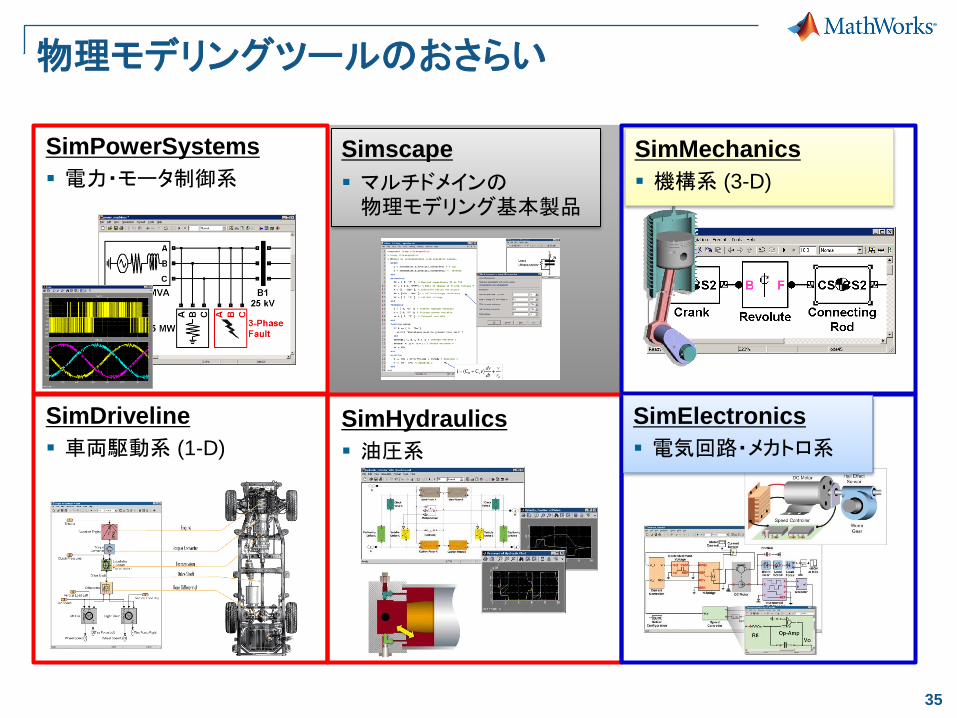
35
Simscape
マルチドメインの 物理モデリング基本製品
物理モデリングツールのおさらい
SimPowerSystems
電力・モータ制御系
SimMechanics
機構系 (3-D)
SimDriveline
車両駆動系 (1-D)
SimHydraulics
油圧系
SimElectronics
電気回路・メカトロ系
36
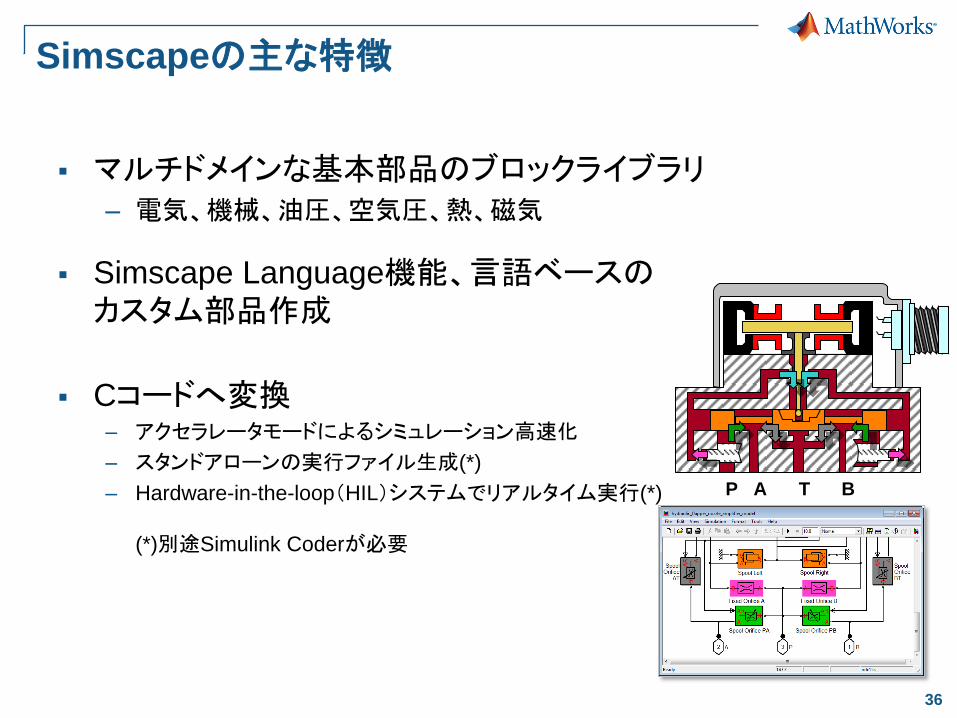
Simscapeの主な特徴
マルチドメインな基本部品のブロックライブラリ
– 電気、機械、油圧、空気圧、熱、磁気
Simscape Language機能、言語ベースの
カスタム部品作成
Cコードへ変換 – アクセラレータモードによるシミュレーション高速化
– スタンドアローンの実行ファイル生成(*)
– Hardware-in-the-loop(HIL)システムでリアルタイム実行(*)
(*)別途Simulink Coderが必要
P A T B
37
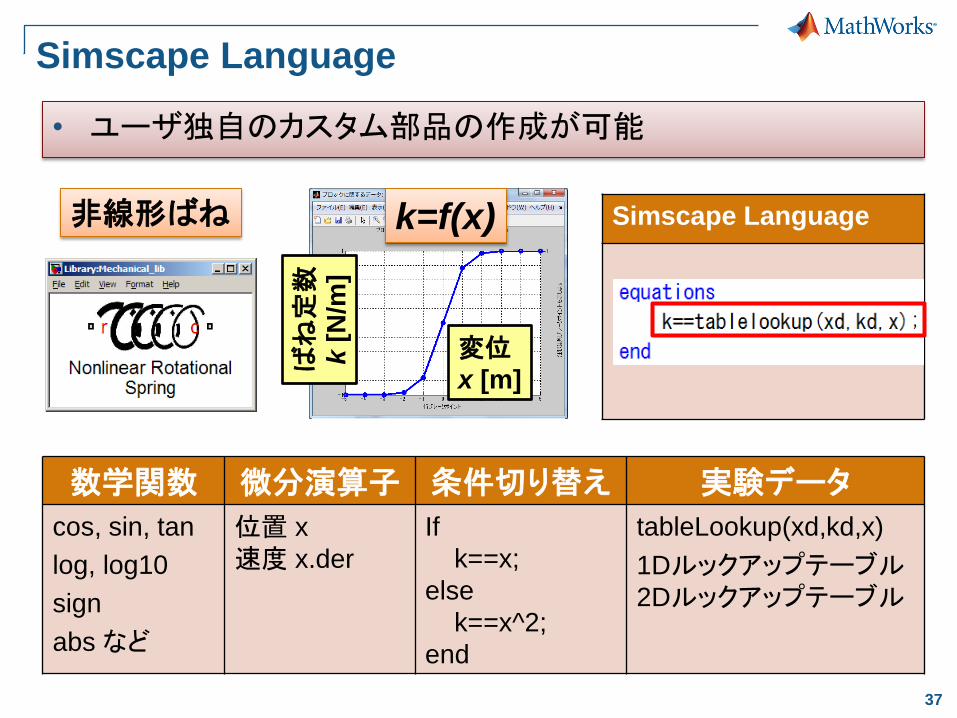
Simscape Language
変位
x [m]
ばね定数
k [
N/m
]
数学関数 微分演算子 条件切り替え 実験データ
cos, sin, tan
log, log10
sign
abs など
位置 x
速度 x.der
If
k==x;
else
k==x^2;
end
tableLookup(xd,kd,x)
1Dルックアップテーブル
2Dルックアップテーブル
非線形ばね k=f(x) Simscape Language
• ユーザ独自のカスタム部品の作成が可能
38
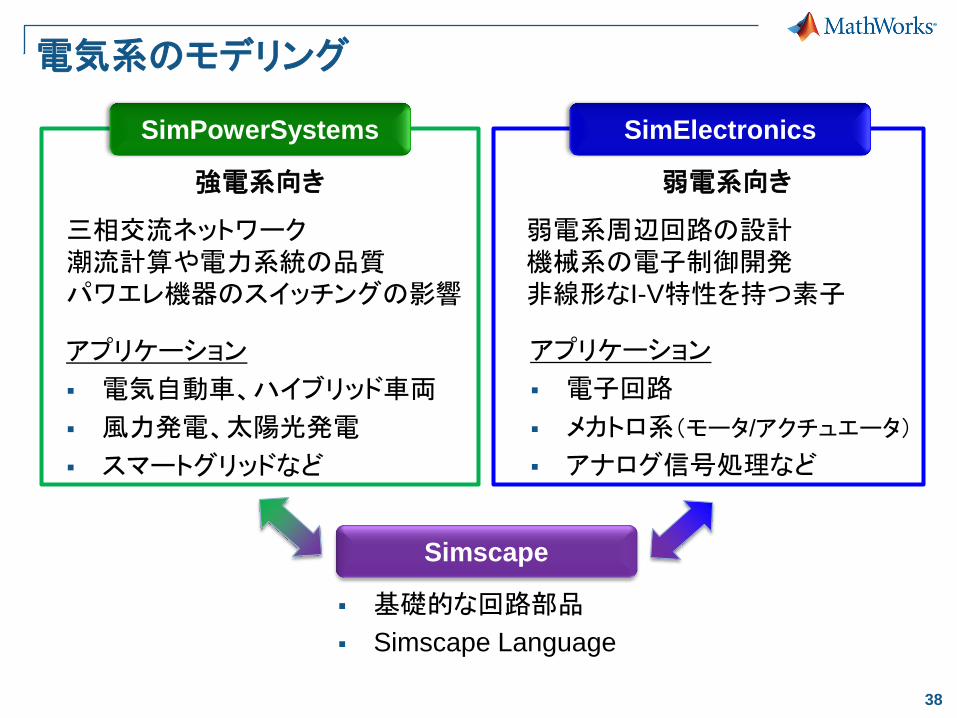
電気系のモデリング
Simscape
基礎的な回路部品
Simscape Language
三相交流ネットワーク
潮流計算や電力系統の品質
パワエレ機器のスイッチングの影響
アプリケーション
電気自動車、ハイブリッド車両
風力発電、太陽光発電
スマートグリッドなど
強電系向き
アプリケーション
電子回路
メカトロ系(モータ/アクチュエータ)
アナログ信号処理など
弱電系周辺回路の設計
機械系の電子制御開発
非線形なI-V特性を持つ素子
弱電系向き
SimPowerSystems SimElectronics
39
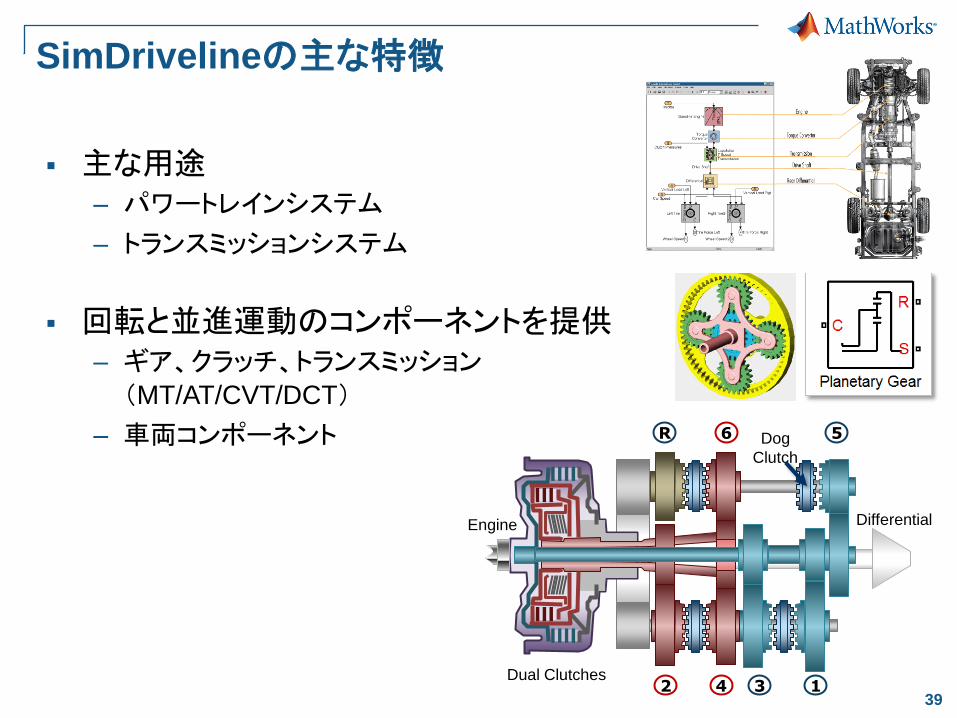
SimDrivelineの主な特徴
主な用途
– パワートレインシステム
– トランスミッションシステム
回転と並進運動のコンポーネントを提供
– ギア、クラッチ、トランスミッション
(MT/AT/CVT/DCT)
– 車両コンポーネント
Differential Engine
1 2 3 4
5 6 R
Dual Clutches
Dog
Clutch
40
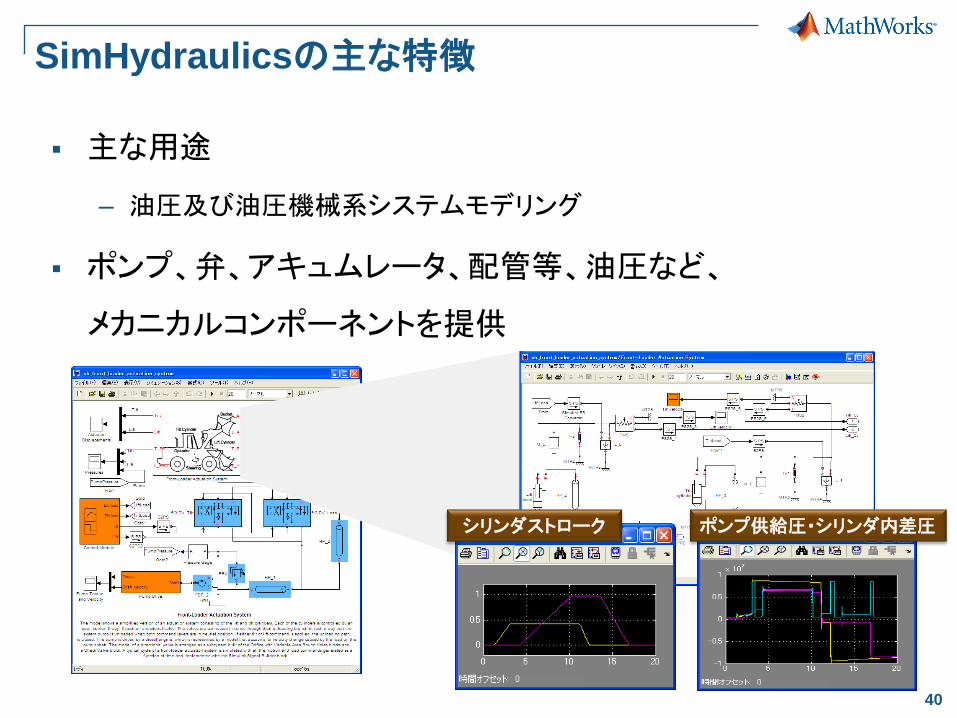
SimHydraulicsの主な特徴
主な用途
– 油圧及び油圧機械系システムモデリング
ポンプ、弁、アキュムレータ、配管等、油圧など、
メカニカルコンポーネントを提供
シリンダストローク ポンプ供給圧・シリンダ内差圧
42
4 最新情報
4
最新
情報
6
まとめ
1
はじめに
2
物理
モデリング
3
アドバンスド
トピック
5
公開モデル紹介
43
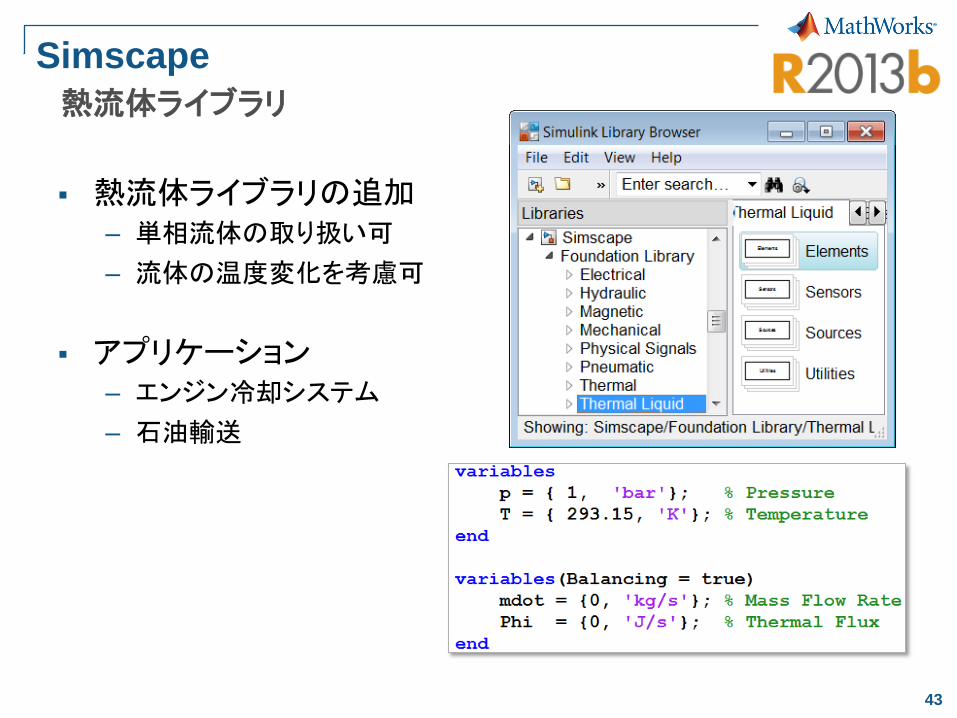
Simscape
熱流体ライブラリ
熱流体ライブラリの追加
– 単相流体の取り扱い可
– 流体の温度変化を考慮可
アプリケーション
– エンジン冷却システム
– 石油輸送
44
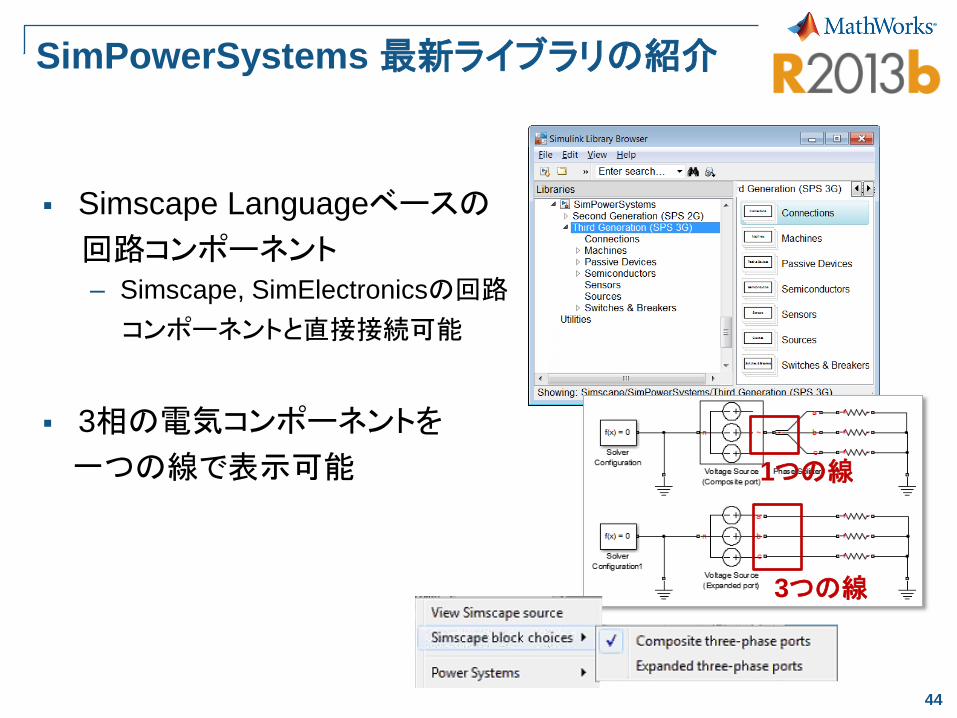
SimPowerSystems 最新ライブラリの紹介
Simscape Languageベースの
回路コンポーネント
– Simscape, SimElectronicsの回路
コンポーネントと直接接続可能
3相の電気コンポーネントを
一つの線で表示可能
1つの線
3つの線
45
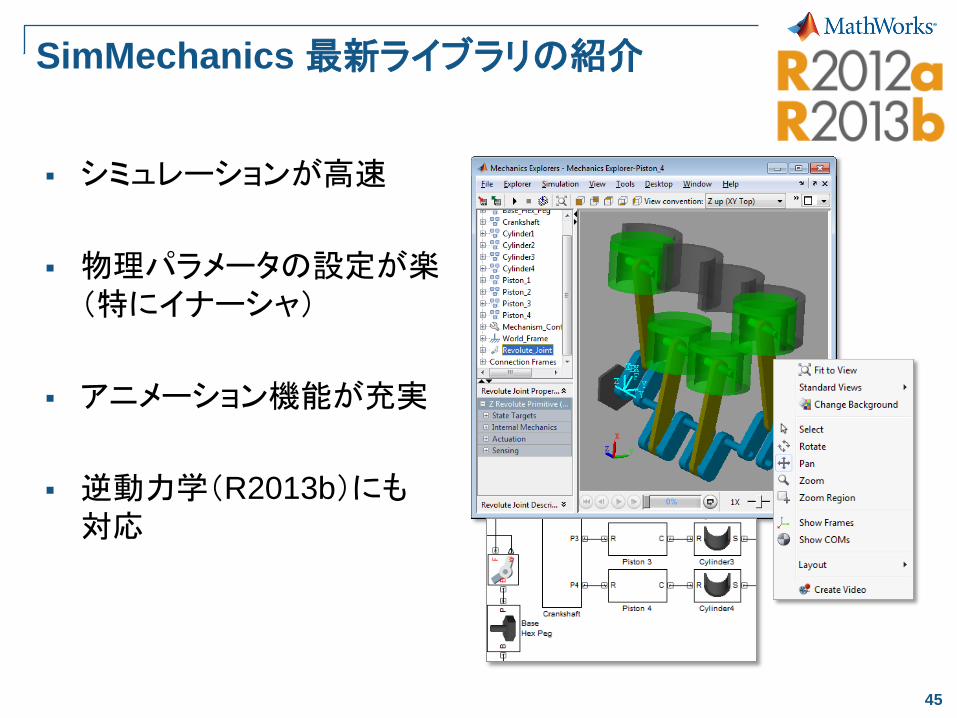
SimMechanics 最新ライブラリの紹介
シミュレーションが高速
物理パラメータの設定が楽
(特にイナーシャ)
アニメーション機能が充実
逆動力学(R2013b)にも
対応

47
5 公開モデル紹介
5
公開モデル紹介
6
まとめ
1
はじめに
4
最新
情報
2
物理
モデリング
3
アドバンスド
トピック
48
URL
http://www.mathworks.co.jp/matlabcentral/fileexchange/
File Exchange
49
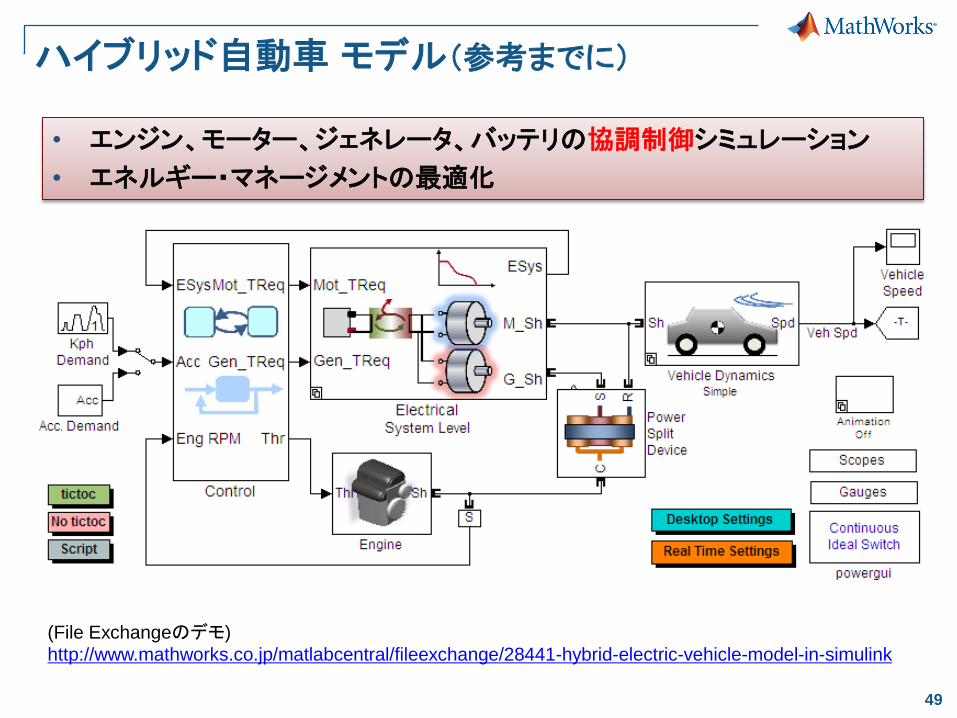
ハイブリッド自動車 モデル(参考までに)
(File Exchangeのデモ)
http://www.mathworks.co.jp/matlabcentral/fileexchange/28441-hybrid-electric-vehicle-model-in-simulink
• エンジン、モーター、ジェネレータ、バッテリの協調制御シミュレーション
• エネルギー・マネージメントの最適化
50
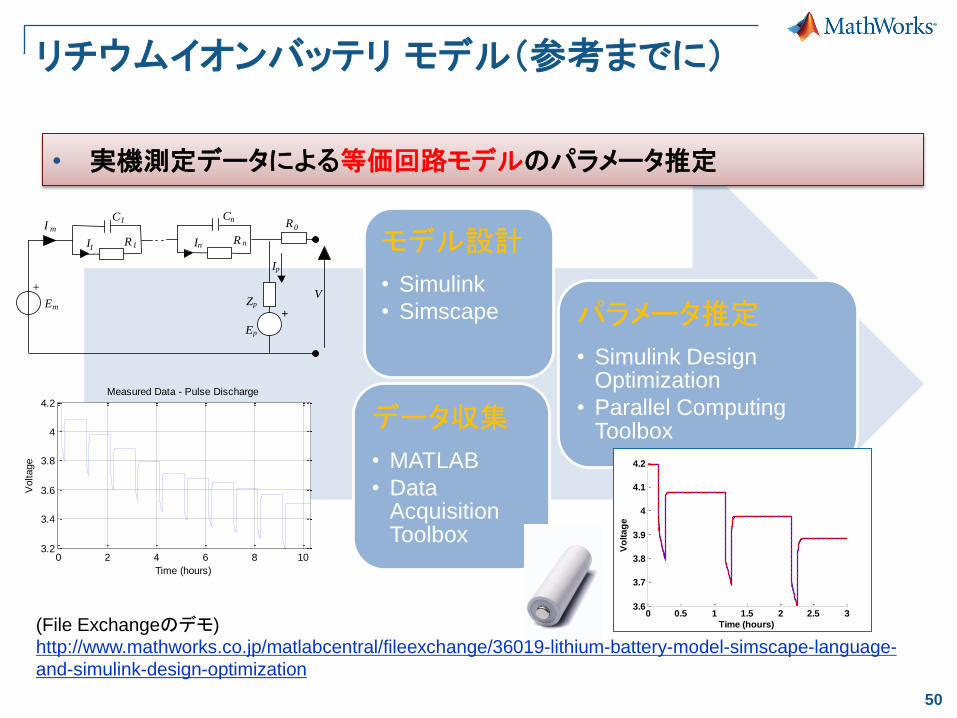
リチウムイオンバッテリ モデル(参考までに)
データ収集
• MATLAB
• Data Acquisition Toolbox
モデル設計
• Simulink
• Simscape パラメータ推定
• Simulink Design Optimization
• Parallel Computing Toolbox
0 2 4 6 8 103.2
3.4
3.6
3.8
4
4.2
Voltage
Time (hours)
Measured Data - Pulse Discharge
0 2 4 6 8 10 12-30
-25
-20
-15
-10
-5
0
Curr
ent
(Am
ps)
Time (hours)
0 0.5 1 1.5 2 2.5 33.6
3.7
3.8
3.9
4
4.1
4.2
Time (hours)V
olt
ag
e0 0.5 1 1.5 2 2.5 3
3.6
3.7
3.8
3.9
4
4.1
4.2
Time (hours)V
olt
ag
e0 0.5 1 1.5 2 2.5 3
3.6
3.7
3.8
3.9
4
4.1
4.2
Time (hours)V
olt
ag
e0 0.5 1 1.5 2 2.5 3
3.6
3.7
3.8
3.9
4
4.1
4.2
Time (hours)V
olt
ag
e0 0.5 1 1.5 2 2.5 3
3.6
3.7
3.8
3.9
4
4.1
4.2
Time (hours)V
olt
ag
e
E
+
I I
C 1 C n
R n n 1 R 1
V
R 0
m
I m
+
Ip
Ep
Zp
(File Exchangeのデモ)
http://www.mathworks.co.jp/matlabcentral/fileexchange/36019-lithium-battery-model-simscape-language-
and-simulink-design-optimization
• 実機測定データによる等価回路モデルのパラメータ推定
51
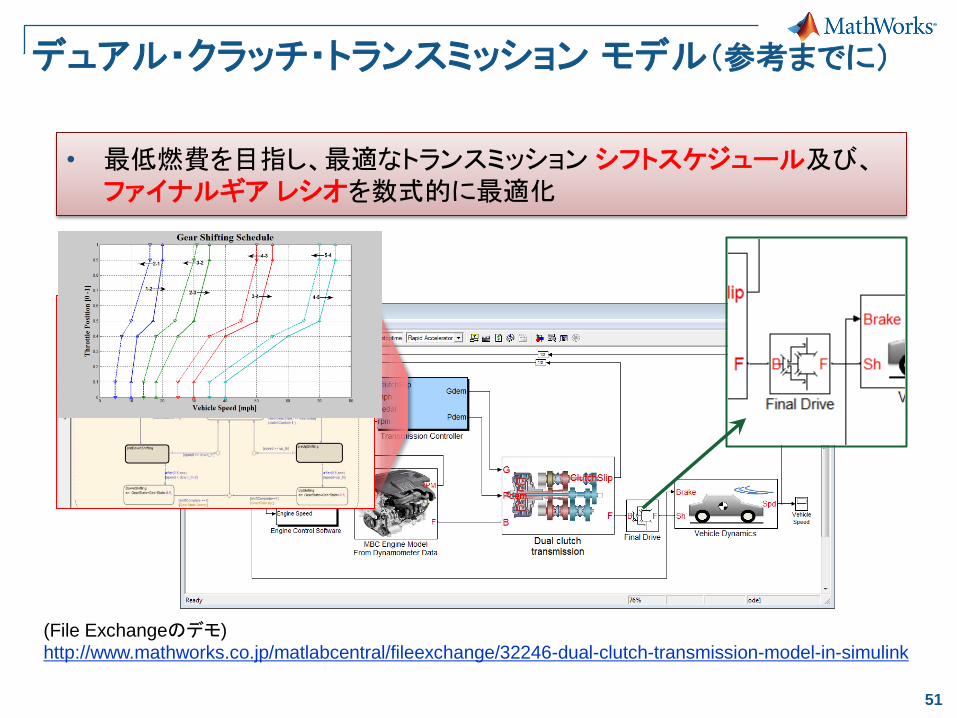
デュアル・クラッチ・トランスミッション モデル(参考までに)
(File Exchangeのデモ)
http://www.mathworks.co.jp/matlabcentral/fileexchange/32246-dual-clutch-transmission-model-in-simulink
• 最低燃費を目指し、最適なトランスミッション シフトスケジュール及び、ファイナルギア レシオを数式的に最適化
52
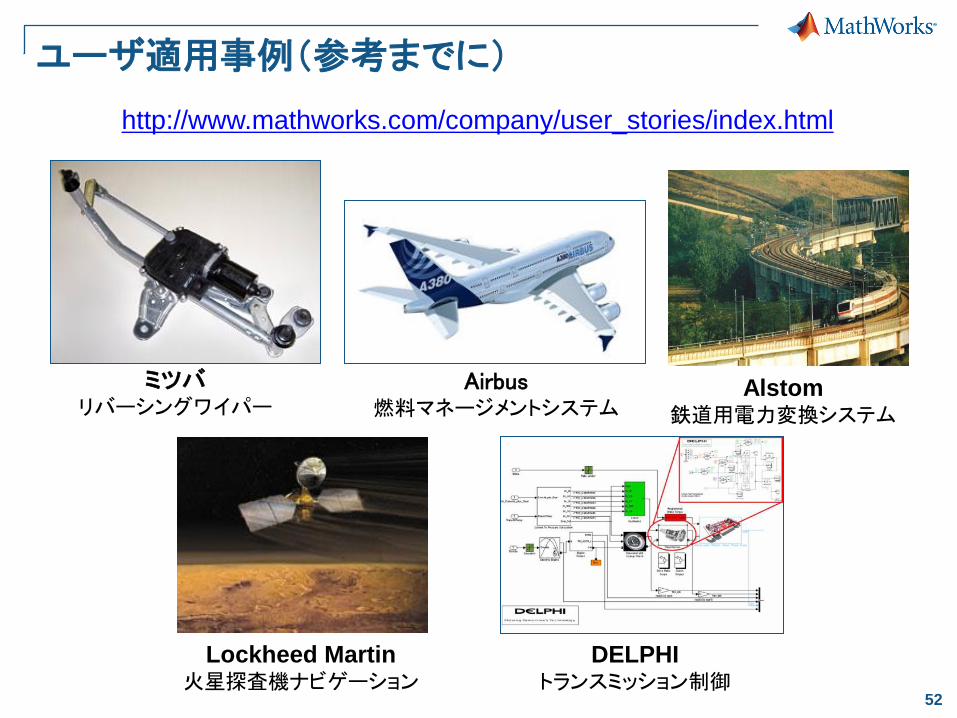
ユーザ適用事例(参考までに)
http://www.mathworks.com/company/user_stories/index.html
Lockheed Martin 火星探査機ナビゲーション
DELPHI トランスミッション制御
Alstom 鉄道用電力変換システム
ミツバ リバーシングワイパー
Airbus 燃料マネージメントシステム
53
6 まとめ
6
まとめ
1
はじめに
4
最新
情報
2
物理
モデリング
3
アドバンスド
トピック
5
公開モデル紹介
54
まとめ
直感的なモデリング 専用ライブラリ によるモデリング
仕様変更が容易 大規模・複雑な システムに対応
SimscapeとSimシリーズのメリットについて
システム全体のモデリングが可能
開発の初期段階でシステムの妥当性確認が可能
Simscape+Simシリーズを使って、
快適な物理モデリングを
55
© 2013 The MathWorks, Inc. MATLAB and Simulink are registered trademarks of The
MathWorks, Inc. See www.mathworks.com/trademarks for a list of additional
trademarks. Other product or brand names may be trademarks or registered
trademarks of their respective holders.
ご清聴ありがとうございました。
56
物理モデリングに関連する
オンデマンドWebセミナー(参考までに) http://www.mathworks.co.jp/recordedwebinars
太陽光発電システムの最大電力追従制御のモデリングとシミュレーション http://www.mathworks.co.jp/wbnr61572
風力タービン制御システムのモデルベースデザイン http://www.mathworks.co.jp/wbnr49349
ハイブリッド自動車のモデリングとシミュレーション http://www.mathworks.co.jp/wbnr53189
57
関連情報(参考までに)
物理モデリングツール製品情報 http://www.mathworks.co.jp/products/
次のステップ
– 評価版ダウンロード
– お問い合わせ先
http://www.mathworks.co.jp/contact
セミナー情報
– ライブWebセミナー
http://www.mathworks.co.jp/webinars
– オンデマンドWebセミナー
http://www.mathworks.co.jp/recordedwebinars
– セミナー
http://www.mathworks.co.jp/seminars
























![オブジェクト指向モデリング [11]](https://img.pdfslide.tips/doc/110x75/56813ffe550346895dab2e9a/-1156813ffe550346895dab2e9a.jpg)



![オブジェクト指向モデリング [6]](https://img.pdfslide.tips/doc/110x75/56813a73550346895da26d15/-656813a73550346895da26d15.jpg)