Embed Size (px)
Citation preview

SIMULASI DRYING GRINDING SYSTEM PADA BIJI KOPI SECARA
OTOMATIS MENGGUNAKAN PORT PARALLEL DAN DITUNJANG
BAHASA PEMROGRAMAN BORLAND DELPHI 6.0 DENGAN GRAFIK
USER INTERFACE
PENELITIAN INDIVIDU
Oleh : WANDI SYAHINDRA
SEKOLAH TINGGI AGAMA ISLAM NEGERI
(STAIN) CURUP
2007

1
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Era millenium dan afta globalisasi 2003 merupakan suatu tantangan. Saat ini
sangat dibutuhkan. Komputer sebagai sebuah alat bantu hasil kemajuan teknologi
yang telah digunakan secara meluas di masyarakat. Perkembangan teknologi
komputer yang semakin pesat ini baik aspek perangkat lunak maupun perangkat keras
menuntut adanya sumber daya yang handal (human ability) secara terampil dan
mampu mengikuti perkembangan ilmu pengetahuan dan teknologi untuk pencapaian
efektifitas dan efisiensi dari sumber yang ada.
Komputer terutama yang tergolong mikro seperti komputer PC selain
digunakan untuk pengolah kata, mengolah data dalam bentuk lembar kerja
(spreadsheet), dan database pada skala lokal sekarang ini banyak diaplikasikan untuk
komunikasi data dimana tukar menukar data tersebut terjadi antar komputer sehingga
membentuk jaringan dalam ruang yang sama, antar gedung, kota, bahkan antar negara
sehingga terbentuk persambungan atau interkoneksi antar jaringan komputer yang
disebut Interconnention Network (Internet). Khusus pada aspek perangkat lunak
terjadi kemajuan seperti adanya program-program yang berorientasi objek dan
berbasis pengetahuan (knowledge based) dimana kedua unsur ini mendukung
terjadinya perkembangan intelejensia semu (artificial intelligence) sebagai contoh
sistem kepakaran (expert system).

2
Umumnya komputer-komputer PC tersebut telah difabrikasi sedemikian rupa
sehingga memungkinkan para pengguna mendapatkan kemudahan untuk
menganalisa, mengembangkan dan berinovasi dalam pemanfaatan komputer tersebut.
Berdasarkan kemampuan yang ada, salah satu bidang untuk mengoptimalkan
penggunaan komputer adalah sebagai basis sistem kontrol untuk obyek atau peralatan
luar. Setiap komputer pada dasarnya telah dilengkapi rangkaian elektronika yang
berfungsi sebagai perantara dengan peralatan-peralatan luar yang standard (input
output modul) seperti printer, monitor, keyboard, dan drive. Untuk
menghubungkannya dengan printer interfacenya bersifat fleksibel, artinya dapat
digunakan untuk berbagai aplikasi atau untuk memperantarai tidak hanya dengan
peralatan input-output standar tetapi juga dengan peralatan lain yang dirancang untuk
tujuan khusus.
Salah satu peralatan aplikatif yang seringkali dalam pengoperasiannya masih
dilakukan secara manual adalah Dyring Grinding System untuk biji kopi. Siklus
proses yang terjadi selama penggilingan biji kopi, mengalami kendala dalam
mengkontrol kesesuaian antara jumlah biji kopi yang diinputkan dengan setelah
digiling dan keterlibatan banyak tenaga kerja yang juga berakibat terhadap rendahnya
faktor higienis.
Uraian diatas menggambarkan adanya masalah yang menarik untuk dijadikan
topik pembahasan. Terutama adalah menerapkan otomatisasi pengontrolan
berbasiskan komputer terhadap penggilingan biji kopi yang sebelumnya dilakukan
secara manual, dengan demikian skripsi ini diberi judul “ Simulasi Drying Grinding

3
System Pada Biji Kopi Secara Otomatis Menggunakan Port Parallel Dan
Ditunjang Bahasa Pemrograman Borland Delphi 6.0 Dengan Grafik User
Interface ”.
1.2 Perumusan Masalah
Berdasarkan latar belakang masalah yang ada maka dapat ditentukan beberapa
perumusan masalah diantaranya adalah :
1. Optimalisasi komputer PC dalam pengontrolan obyek khusus dan dengan
memanfaatkan I/O modul yang ada, memerlukan penganalisaan yang akurat.
2. Agar terjadi kesesuaian operasi yang dilakukan antara komputer/cpu dengan
obyek atau peralatan I/O yang khusus maka diperlukan rancangan modul program
khusus.
3. Selain harus dirancang modul program, otomatisasi terhadap obyek atau peralatan
luar yang sebelumnya manual, memerlukan rangkaian-rangkaian elektronika dan
mekanik tambahan yang dirancang secara khusus.
4. Agar akurat dan tidak terjadi pemborosan biaya akibat kerusakan yang mungkin
timbul selama percobaan terhadap obyek atau peralatan luar tersebut, maka harus
dibuat miniaturnya yang beroperasi sesuai yang sesungguhnya (prototype).
1.3 Hipotesa
Siklus proses yang terjadi selama penggilingan biji kopi, mengalami kendala
dalam mengkontrol kesesuaian antara jumlah biji kopi yang diinputkan dengan
setelah digiling dan keterlibatan banyak tenaga kerja yang juga berakibat terhadap

4
rendahnya faktor higienis. Hal inilah yang mencari suatu permasalahan dari segi
biaya, waktu dan faktor higienisnya.
1.4 Ruang Lingkup Masalah
Pada ruang lingkup masalah ini, dibuat suatu batasan yang memaparkan cara
kerja sistem agar tidak meluasnya masalah yang timbul sehingga terbentuklah skripsi
dengan kualitas yang lebih baik. Adapun batasan masalahnya adalah :
1. Dilakukan analisa terhadap konfigurasi port parallel yang ada, yang biasa
digunakan untuk perantara printer, termasuk besaran arus dan tegangan serta
fungsi tiap pin pada port parallel.
2. Merancang sebuah modul program menggunakan Borland Delphi 6.0 untuk
mengkontrol otomatisasi aktifitas kerja penggilingan biji kopi.
3. Mengaplikasikan rangkaian motor stepper, motor dc dan motor ac serta rangkaian
sensor infra red dan fototrasistor sebagai simulasi Drying Grinding System pada
biji kopi.
1.5 Tujuan Penulisan
Adapun tujuan yang hendak dicapai untuk penggilingan biji kopi ini antara
lain :
1. Mengikuti perkembangan dan kemajuan teknologi komputer yang terjadi pada
saat itu baik secara hardware maupun software.

5
2. Diharapkan dengan perancangan alat ini akan dapat mampu merubah sistem yang
dilakukan secara manual menjadi sebuah sistem pengontrolan dan pengaturan
yang berbasiskan sistem komputer.
3. Dengan memanfaatkan komputer PC sebagai pengontrol dan pengaturan
penggilingan biji kopi diharapkan dapat diimplementasikan dalam dunia industri
yang menerapkan konsep komputerisasi.
4. Keotomatisasian alat ini hendaknya diharapkan dapat mencapai target secara
maksimal dalam aplikasi sehari-hari.
5. Memberikan gambaran adanya efektifitas yang tinggi jika peralatan yang
beroperasi dikontrol dengan komputer.
1.6 Metode Penelitian
Metode penelitian adalah cara yang ditempuh untuk mendapatkan tujuan
dengan sebaik-baiknya. Adapun metode yang digunakan didalam menyelesaikan
skripsi ini adalah sebagai berikut :
1. Field Research (Penelitian Lapangan)
Yaitu penelitian yang berdasarkan atas pengamatan langsung dari kejadian pada
lapangan terutama pada pengilingan biji kopi, yakni meneliti kekurangan-
kekurangan yang terjadi pada proses penggilingan tersebut sehingga bisa
kembangkan pada aplikasi alat yang berbasiskan sistem komputer.
2. Library Research (Penelitian Kepustakaan)
Yaitu melakukan studi pustaka dengan membaca dan mempelajari buku-buku
yang relevan dan berkaitan dengan objek penelitian secara teoritis. Penelitian ini

6
melalui literatur-literatur yang berhubungan dengan tema dari skripsi ini, untuk
mencari informasi dalam menyusun teori-teori yang didapat baik secara global
maupun detailnya yang dilakukan secara langsung keperpustakaan guna
memperoleh data dan informasi yang bersifat teoritis agar dapat membantu dalam
menyelesaikan pembuatan alat ini.
3. Laboratorium Research (Penelitian Laboratorium)
Meliputi kegiatan perancangan, pembuatan alat, pendeteksian kesalahan dan
mencoba alat, serta membuat program yang tepat bagi alat tersebut agar kondisi
alat dapat berjalan sesuai dengan yang diharapkan. Adapun spesifikasi perangkat
komputer yang digunakan adalah :
A. Hardware, yaitu :
1. Komputer PC Pentium III 733 Mhz
2. MainBoard Soltek SL-65DV2
3. RAM 128 Mb
4. Harddisk dengan kapasitas 10 Gb
5. Disket 3.5 inchi panasonic
6. CD-ROM Creative 52X Speed
7. VGA Card Sis 6326 slot AGP
8. Sound Card On Board Chip Set VIA
9. Monitor SVGA LG Studioworks 560 N
10. Keyboard PS/2 compatible with PC
11. Mouse PS/2 compatible with PC

7
12. Printer Canon BJC-2100SP with USB Port
B. Software, yaitu :
1. Sistem Operasi Windows 98 Second Edition
2. Microsoft Word 2000
3. Paint for Windows 98 SE
4. Microsoft Visio 2000
5. Borland Delphi 6.0 Enterprise
6. Flow Chart 4.0 for Windows 9x

8
BAB II
LANDASAN TEORI
2.1 Latar Belakang Teknik
Pada sub bab ini akan dibahas mengenai siklus hidup pengembangan sistem
(system development life cycle) dan interface yang digunakan pada perancangan alat.
Sesuai dengan keakuratan alat yang dibuat, maka dua hal yang penting akan di bahas
pada sub bab ini.
2.1.1 Siklus Hidup Pengembangan Sistem (System Development Life Cycle)
Pengembangan sistem informasi yang berbasis komputer dapat merupakan
tugas kompleks yang membutuhkan banyak sumber daya dan dapat memakan waktu
berbulan-bulan bahkan bertahun-tahun untuk menyelesaikannya. Proses
pengembangan sistem itu direncanakan sampai dengan sistem tersebut diterapkan,
dioperasikan dan dipelihara. Bila dalam pengoperasian yang sudah dikembangkan
masih timbul permasalahan-permasalahan yang kritis serta dapat diatasi dalam tahap
pemeliharaan sistem, maka perlu dikembangkan kembali suatu sistem untuk
mengatasinya, dan proses ini kembali ketahap yang pertama, yaitu tahap perencanaan
sistem. Siklus ini disebut dengan siklus hidup suatu sistem ( system life cycle ).
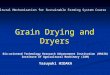
Langkah-langkah utama siklus hidup pengembangan sistem yang sering dipakai dapat
dilihat pada gambar 2.1.

9
Gambar 2.1 Siklus Hidup Pengembangan Sistem
Siklus hidup pengembangan sistem dengan langkah-langkah utamanya yang
akan digunakan adalah sebagai berikut.
1. Tahap kebijakan dan perencanaan sistem
Sebelum suatu sistem informasi dikembangkan, umumnya terlebih dahulu
dimulai dengan adanya suatu kebijakan dan perencanaan untuk mengembangkan
sistem itu. Tanpa adanya perencanaan sistem yang baik, pengembangan sistem tidak
akan dapat berjalan sesuai dengan yang diharapkan. Tanpa adanya kebijakan
pengembangan sistem oleh manajemen puncak, maka pengembangan sistem tidak
akan mendapat dukungan dari manajemen puncak (top management). Padahal
dukungan tersebut sangat penting artinya. Kebijakan sistem (system policy)
merupakan landasan dan dukungan dari manajemen puncak untuk membuat
Kebijaksanaan dan Perancangan Sistem
Analisis Sistem
Desain (Perancangan) Sistem Secara Umum
Desain (Perancangan) Sistem Secara Terinci
Seleksi Sistem
Implementasi Sistem
Perawatan Sistem
Awal
proyek
Sistem
Pengembangan
Sistem
Manajemen
Sistem

10
perencanaan sistem. Perencanaan sistem (system planning) merupakan pedoman
untuk melakukan pengembangan sistem.
2. Tahap analisis sistem
Tahap ini dilakukan setelah tahap perencanaan sistem dan sebelum tahap
desain sistem. Tahap ini merupakan tahap yang kritis dan sangat penting, karena
kesalahan didalam tahap ini akan menyebabkan kesalahan ditahap selanjutnya.
Didalam tahap ini terdapat langkah-langkah dasar yang harus dilakukan oleh analis
sistem sebagai berikut:
1. Identify, yaitu mengidentifikasikan masalah.
2. Understand, yaitu memahami kerja dari sistem yang ada.
3. Analyze, yaitu menganalisis sistem.
4. Report, yaitu membuat laporan hasil analisis.
3. Tahap desain sistem
Setelah tahap analisis dilakukan, maka analis sistem telah mendapatkan
gambaran dengan jelas apa yang harus dilakukan. Untuk itu seorang analisis sistem
harus memikirkan bagaimana membentuk sistem tersebut. Tahap ini disebut dengan
sistem (systems design).
Pengertian desain sistem menurut beberapa ahli adalah sebagai berikut:
1. Menurut Robert J. Verzello dan John Reuter III ( terjemahan, 1982 )
Tahap setelah analisis dari siklus pengembangan sistem, pendefinisian dari
kebutuhan-kebutuhan fungsional dan persiapan untuk rancang bangun
implementasi dan menggambarkan bagaimana suatu sistem dibentuk.

11
2. Menurut John Burch dan Gary Grudnitski ( terjemahan, 1984 )
Desain sistem dapat didefinisikan sebagai penggambaran, perencanaan dan
pembuatan sketsa atau pengaturan dari beberapa elemen yang terpisah
kedalam satu kesatuan yang utuh dan berfungsi.
3. Menurut george M. Scott ( terjemahan, 1986 )
Desain sistem menentukan bagaimana suatu sistem akan menyelesaikan apa
yang mesti diselesaikan. Tahap ini menyangkut mengkonfigurasi komponen-
komponen perangkat lunak dan perangkat keras dari suatu sistem sehingga
setelah instalasi dari sistem akan benar-benar memuaskan rancang bangun
yang telah ditetapkan pada akhir tahap analisis sistem.
Desain sistem terbagi dua, yaitu:
a). Desain secara umum
Tujuan dari desain sistem secara umum adalah untuk memberikan gambaran
secara umum kepada user tentang sistem yang baru. Desain sistem secara umum
merupakan persiapan dari desain secara terinci. Desain secara umum
mengidentifikasikan komponen-komponen sistem informasi yang akan didesain
secara terinci.
b). Desain secara terinci
Tahap ini adalah merupakan kelanjutan dari desain sistem secara umum.
Dimana pada tahap ini akan digambarkan bagaimana dan seperti apa secara terinci
komponen-komponen utama dari sistem informasi dibentuk.
4. Tahap seleksi sistem

12
Hasil dari desain sistem adalah sistem diatas kertas. Hasil desain sistem ini
belum dapat diimplementasikan. Untuk itu komponen-komponen secara fisik perlu
dimiliki. Komponen fisik sistem ini adalah komponen teknologi yang dapat berupa
perangkat keras dan perangkat lunak. Karena banyaknya alternatif teknologi yang
tersedia dan banyaknya penyedia teknologi, maka perlu diadakan suatu penyelesaian.
Memilih atau menyeleksi teknologi dilakukan pada tahap ini. Tugas ini
membutuhkan pengetahuan yang cukup bagi yang melaksanakannya supaya dapat
memenuhi kebutuhan rancang bangun yang telah dilakukan. Pengetahuan yang
dibutuhkan oleh pemilih sistem diantaranya adalah pengetahuan tentang siapa yang
menyediakan teknologi ini dan sebagainya. Pemilih sistem juga harus paham dengan
teknik-teknik evaluasi untuk menyelesaikan sistem.
5. Tahap implementasi sistem
Tahap ini merupakan tahap dimana suatu sistem siap untuk dioperasikan.
Tahap ini terdiri dari langkah-langkah sebagai berikut:
1. Menerapkan rencana implementasi.
2. Melakukan kegiatan implementasi.
3. Tindak lanjut implementasi.
6. Tahap perawatan sistem
Tahap ini adalah merupakan tahap yang paling penting dan tahap akhir dalam
sebuah pengembangan sistem. Dimana pada tahap ini hanya lebih ditekankan kepada
pemeliharaan sistem yang lebih mengarah kepada manajemen sistem. Untuk itu pada

13
tahap ini, seorang analis sistem juga harus memikirkan apa tindakan terbaik yang
perlu dilakukan didalam pengembangan sebuah sistem.
2.1.2 Data Flow Diagram ( DFD )
Bagan-bagan yang digunakan untuk mewakili arus data dalam suatu sistem
bukanlah sebuah hal yang baru. Pada tahun 1967, Martin dan Estrin memperkenalkan
suatu algoritma program yang menggunakan simbol lingkaran dan panah untuk
mewakili arus data. E.Yourdan dan L.L Constantine juga menggunakan notasi simbol
ini untuk menggambarkan arus data dalam perancangan program. G.E Whitehouse
tahun 1973 juga menggunakan notasi semacam ini untuk membuat model-model
sistem matematika.
Penggunaan notasi dalam diagram arus data ini sangat membantu sekali untuk
memahami suatu sistem pada semua tingkat kompleksitasnya seperti yang
diungkapkan oleh Chris Gane dan Trish Sarson. Pada tahap analisis, penggunaan
notasi ini sangat membantu sekali di dalam komunikasi dengan pemakai sistem untuk
memahami sistem secara logika.
Diagram yang menggunakan notasi-notasi ini untuk menggambarkan arus
dari data sistem sekarang dikenal dengan nama diagram arus data (Data Flow
Diagram atau DFD). Data Flow Diagram sering digunakan untuk menggambarkan
suatu sistem yang telah ada atau sistem baru yang akan dikembangkan secara logika
tanpa mempertimbangkan lingkungan fisik dimana data tersebut mengalir atau
lingkungan fisik dimana data tersebut akan disimpan.

14
DFD merupakan alat yang digunakan pada metodologi pengembangan sistem
yang terstruktur. DFD merupakan alat yang cukup popular sekarang ini, karena dapat
menggambarkan arus data di dalam sistem dengan terstruktur dan jelas. DFD juga
merupakan dokumentasi dari sistem yang baik.
2.1.2.1 Simbol Pada DFD
Pada dasarnya terdapat beberapa simbol yang digunakan pada DFD, simbol-
simbol tersebut antara lain adalah :
1. External Entity atau Boundary.
Setiap sistem pasti mempunyai batas sistem (boundary) yang memisahkan
suatu sistem dengan lingkungan luarnya. Kesatuan luar (External Entity) merupakan
kesatuan entity di lingkungan luar sistem yang dapat berupa orang, organisasi atau
sistem lainnya yang berada dilingkungan luarnya yang akan memberikan input atau
menerima output dari sistem. Suatu kesatuan luar dapat disimbolkan dengan suatu
notasi kotak dan diberi identifikasi .
Gambar 2.2 Notasi Kesatuan Luar di DFD
2. Data Flow (Arus Data)
Arus data (Data Flow) DFD diberi simbol suatu panah. Arus data ini mengalir
diantara proses (process), disimpanan data (Data Store) dan kesatuan luar (External
Entity). Arus ini menunjukkan arus dari data yang dapat berupa masukan untuk

15
1
proses
sinyal
Sinyal Sensor
system atau hasil dari proses sistem. Data flow dilambangkan dengan anak panah dan
diberi nama yang jelas dan punya arti.
Gambar 2.3 Arus Data
3. Process (Proses)
Proses adalah kegiatan atau kerja yang dilakukan oleh orang, mesin atau
komputer dari hasil suatu arus yang masuk kedalam proses untuk dihasilkan arus data
yang keluar dari proses.
Proses yang baik akan dapat tercapai apabila proses tersebut dibantu dengan
input dan output. Input berfungsi sebagai masukan yang akan diproses sedangkan
output berfungsi sebagai keluaran dari proses yang telah di inputkan tadi. Suatu
proses dapat dilambangkan dengan simbol lingkaran atau dengan simbol empat
persegi panjang tegak dengan sudut-sudutnya yang tumpul.
Gambar 2.4 Notasi Proses di DFD
4. Data Store (Simpanan Data)
Simpanan data (Data Store) merupakan simpanan dari data yang telah
diproses dan dapat berupa :
atau
Identifikasi
Nama
proses

16
a. File atau data base di sistem komputer.
b. Arsip atau catatan manual.
c. Kotak tempat data di meja seseorang
d. Table acuan manual
e. Agenda atau buku.
Simpanan data di DFD dapat disimbolkan dengan sepasang garis horizontal
paralel yang tertutup di salah satu ujungnya, seperti yang terlihat pada gambar
dibawah ini
Gambar 2.5 Simbol Simpanan Data di DFD
Nama dari data store menunjukkan nama dari filenya. Media yaitu tempat
penyimpanan datanya.
2.1.3 Interface
Interface atau antarmuka adalah rangkaian yang bertugas menyesuaikan kerja
dari piranti peripheral yang sesuai dengan cara kerja komputer itu sendiri. Rangkaian
ini diperlukan karena besarnya (tegangan, arus, daya dan kecepatan proses) piranti
peripheral kebanyakan tidak sesuai dengan peripheral input–output device, maka
besaran ini harus disesuaikan dengan bantuan interface.
Untuk menghubungkan piranti peripheral seperti relai, motor, indicator,
sensor, catu daya, IC yang dapat diprogram, pembangkit frekwensi dan lain-lain,
perlu interface sebagai antar muka. Pengertian interface sendiri adalah rangkaian
elektronik yang digunakan untuk menghubungkan antara dua sistem, agar system
Media Nama data store

17
tersebut bisa berkomunikasi atau proses handshaking. Dimana fungsi dari interface
adalah mengizinkan komputer berkomunikasi dengan dunia diluar komputer.
2.1.3.1 Interface Parallel Port DB 25
Parallel port merupakan salah satu interface yang ada dari beberapa jenis
interface. Parallel printer port sudah di sediakan sebagai alternatif serial port untuk
pengiriman data ke matrix printer yang teknologinya cepat berkembang. Paralel
printer port mempunyai kemampuan mengirim 8 bit data sedangkan serial port hanya
dapat mengirim 1 bit data, masing-masing dalam satu waktu pengiriman. Sehingga
parallel port merupakan interface utama pada waktu itu untuk keperluan percetakan.
Dengan cepat berkembangnya teknologi komputer kebutuhan untuk hubungan
external pun bertambah, parallel port kemudian menjadi alat yang dapat dihubungkan
kebanyak peripheral, seperti portable disk drive, tape backup, local area network
adapters dan CD ROM player.
Terdapat tiga katagori masalah yang dihadapi oleh user terhadap parallel
printer port pada tahun-tahun setelah 1981. Pertama, walaupun teknologi PC
berkembang sangat pesat akan tetapi tidak ada perubahan yang sesungguhnya pada
arsitektur parallel printer port. Kecepatan maksimum data yang dapat dicapai adalah
150 kilo byte per detik. Kedua, tidak ada standarisasi elektronik terhadap interface
parallel printer port, sehingga para produsen printer dan peripheral lain sulit
memberikan garansi terhadap compatibillity produk yang mereka produksi. Masalah
terakhir adalah panjang kabel pengiriman data printer, maksimal hanya sekitar 183
cm. Tahun 1991 diadakan pertemuan antara para produsen printer, para produsen

18
tersebut dintaranya Lexmark, IBM, Texas Instruments menghendaki standarisasi
terhadap printer port dan printer yang diproduksi. Para produsen tersebut membentuk
Network Printing Alliance (NPA), NPA kemudian menentukan parameter-parameter
untuk standarisasi tersebut, dari pertemuan tersebut juga disepakati bahwa diperlukan
koneksi bit-directional ke PC untuk meningkatkan kualitas parallel printer port
maupun printer dalam menyelesaikan tugas-tugasnya.
NPA mengajukan proposal standarisasi kepada IEEE untuk pengembangan
bit-directional parallel printer port yang berkecepatan tinggi namun tetap compatible
dengan printer port software dan peripheral terdahulu, akan tetapi kecepatan transfer
datanya dapat mencapai 1 Mega Byte atau lebih, baik input ataupun output. Jarak
maksimum antara pengirim dan penerima adalah sekitar 8 meter karena umumnya
kabel printer terpilin dengan kawat ground (twistar pair) maka produsen printer
menganjurkan kabel tidak melebihi 3 m. Standarisasi tersebut kemudian menjadi
IEEE 1284 standard, ” Standard Signaling Method for a Bi-directional Parallel
Peripheral Interface for Personal Computers ”, yang dikeluarkan oleh IEEE pada
bulan maret 1994.
Parallel Port (DB – 25 Jantan) yang sering kita jumpai pada CPU, yang sering
kita gunakan sebagai interface antara Printer dengan CPU. Parallel Port interface
yaitu rangakaian yang bertugas menyesuaikan kerja dari piranti peripheral yang
sesuai dengan cara kerja komputer itu sendiri.
Ada beberapa nama bagi parallel port. Parallel port yang bukan divideo
adapter diberi nama LPT0, LPT1 dan LPT2 masing-masing mempunyai alamat

19
tersendiri. Berguna memindahkan istilah maka parallel port yang ada di video adapter
dinamai LPT 0. Agar menyingkat nama parallel selanjutnya disebut LPT.
Tabel 2.1 Nama Dan Nomor Registri Parallel Port
LPT 0 LPT 1 LPT 2 Sifat Nama
$ 3BC $ 378 $ 278 R/W DP – 8 Bit
$ 3BE $ 37A $ 27A R/W PC – 4 Bit
$ 3BD $ 379 $ 279 R PC – 5 Bit
Keterangan : R = Read, dapat dibaca. W = write, dapat ditulis.
PC = Printer Control PS = Printer Status. DP = Data Port
2.1.3.2 Dasar-dasar Parallel Port
Paralel port merupakan salah satu interface yang ada dari beberapa jenis
interface. Paralel Port sudah di sediakan sebagai alternatif serial port untuk
pengiriman data ke printer yang teknologinya cepat berkembang. Parallel printer port
mempunyai kemampuan mengirim 8 bit data sedangkan serial port hanya dapat
mengirim 1 bit data dalam waktu yang bersamaan.
Dengan cepat berkembangnya teknologi komputer kebutuhan untuk hubungan
external pun bertambah, paralel port kemudian menjadi alat yang dapat dihubungkan
kebanyak peripheral device yang fungsinya sebagai pengontrol dan penerima input
dari eksternal device.
Konektor yang digunakan pada paralel printer port adalah DB-25 dengan
jumlah pin 25 buah, masing-masing nomor pin dapat dilihat pada gambar 2.4 di
bawah ini.

20
Gambar 2.6 Pin Out Konektor DB-25
Pin-pin printer port merupakan pintu komunikasi dua arah, dari komputer ke
eksternal peripheral dan sebaliknya dari internal peripheral. Nama-nama signal yang
terdapat pada pin konektor DB-25 printer port tersebut adalah :
Tabel 2.2. Tabel Signal pada Pin Printer Port
Pin Signal Input / Output
1 Strobe Output
2 Data 0 Output
3 Data 1 Output
4 Data 2 Output
5 Data 3 Output
6 Data 4 Output
7 Data 5 Output
8 Data 6 Output
9 Data 7 Output
10 Ack Input
11 Busy Input
12 Paper Empty Input
13 Select Input
14 Auto Feed Output
15 Error Input
16 Initialize Printer Output
17 Select Input Output
18 – 25 Ground ---
Tanda garis diatas (“ “) berarti signal tersebut aktiv low atau terjadi
proses peng-inverteran oleh perangkat keras. Masing-masing signal tersebut juga

21
dapat dibagi menurut jenis port addressnya yakni data port, status port dan control
port.
Gambar 2.7 Signal printer port berdasarkan jenis port address
Fungsi signal-signal tersebut adalah sebagai berikut :
1. Strobe : saluran ini diaktifkan komputer jika ia akan meneruskan data ke printer.
2. Data 0
3. Data 1
4. Data 2
5. Data 3
6. Data 4
7. Data 5
8. Data 6
9. Data 7
10. ack : jika printer telah mengolah data yang diterimanya maka dalam waktu
maximal 30 mikrodetik ia memberi sinyal jabat tangan (hand shake) acknowledge
(/ack) ini.
Data Output
D7
D6
D5
D4
D3
D2
D1
D0
Data 7
Data 6
Data 5
Data 4
Data 3
Data 2
Data 1
Data 0
D7
D6
D5
D4
D3
D2
D1
D0
Busy
Ack
PE
Select
Error
Reserved
Reserved
Reserved
D7
D6
D5
D4
D3
D2
D1
D0
Reserved
Reserved
Reserved
Reserved
Select-In
INIT
Autofeed
Strobe
Data Port Status Port Control Port

22
11. Busy : ketika printer menerima data atau mencetak, sinyal ini diaktifkan.
Demikian pula jika ada gangguan atau dalam status offline.
12. Paper Empty : sinyal ini akan terus aktif sampai kertas baru dipasang, sinyal
inilah yang akan diambil sebagai pengontrolan yang dilakukan oleh paralel port
melalui pemrograman.
13. Select (on) : ketika printer telah dihidupkan maka sinyal ini yang menyatakan
printer dalam keadaan online.
14. Auto feed : jika sinyal ini diaktifkan, printer pada akhir setiap baris akan pindah
ke baris selanjutnya secara otomatis.
15. Error : keluaran ini aktif jika ada gangguan seperti printer tidak tersambung atau
tidak menyala (offline).
16. Initialize Printer : dengan saluran ini printer kembali ke keadaan awal.
17. Select Input : pemilihan printer sebagai piranti DTE (Data terminal equipment)
berlangsung dengan sinyal ini.
18. 18-25 ground.
Nama signal-signal tersebut karena pada dasarnya dirancang untuk printer
merupakan nama yang mengacu pada alat pencetak, akan tetapi parallel printer port
sebagai mana yang disampaikan pada bab terdahulu mempunyai kemampuan untuk
pengontrolan terhadap peripheral yang sangat baik, setidak-tidaknya tersedia 8 output
dan 5 input, serta 4 output tambahan untuk proses pengontrolan.

23
2.1.3.3 Pengalamatan Parallel Port
Pada saat komputer pertama kali di hidupkan, BIOS (Basic Input/Output
System) menetapkan jumlah port yang ada dan menentukan alamat port untuk LPT0,
LPT1, LPT2. Setiap paralel port standar IEEE 1284 terdiri atas tiga port address: data
port, status port dan control port yang membentuk hubungan dua arah (bi-directional)
dari dan ke printer. Data port yang biasanya terdapat pada IBM PC compatible
adalah: Tabel 2.3 Tabel Address Printer
Printer
Data Port Status Control
LPT 0 3 BCH 3BDH 3BEH
LPT 1 378H 379H 37AH
LPT 2 278H 279H 27AH
Untuk menentukan alamat LPT0, LPT1, LPT2 dapat dipergunakan DOS debug
program untuk melihat isi alamat memori 0040:0008, dimana terdapat informasi
tentang LPT.
Yang artinya alamat 3BC untuk LPT0, 378 untuk LPT1 dan tidak terdapat LPT2.
Alternatif yang lain adalah mengunakan Microsoft Diagnostics (MSD.EXE) dan
mengambil menu LPT Port. Contoh tampilan pada Microsoft Diagnostics
LPT PORT
Port On Paper I/O Time
Port Address Line Out Error Out Busy Ack
------ ---------- ------- ------- ------ -------- ------- -----
LPT0: 3BCH No No Yes No No Yes
LPT1: 378 H Yes Yes No No Yes No
LPT2: - - - - - - -
Gambar 2.8 Tampilan Microsoft Diagnostics
OK

24
2.2 Bahasa Pemrograman Borland Delphi
Pemrograman merupakan serangkaian instruksi-instruksi yang disusun
sedemikian rupa dan ditulis dalam bahasa yang dimengerti oleh komputer sehingga
komputer dapat melakukan tugas sesuai dengan yang diinginkan. Dalam tugas akhir
ini akan dibahas mengenai bahasa pemrograman yang berbasis orientasi objek yaitu
bahasa pemrograman Borland Delphi 6.0.
2.2.1 Borland Delphi 6.0
Borland Delphi 6.0 merupakan paket bahasa pemrograman yang bekerja
dalam sistem operasi windows dimana Delphi merupakan pemrograman yang
mempunyai cakupan kemampuan kemampuan yang luas dan sangat canggih.
Berbagai jenis aplikasi dapat dibuat dengan Delphi, termasuk aplikasi untuk
mengolah teks, grafik, angka, database, dan aplikasi web. Secara umum, kemampuan
Delphi adalah menyediakan komponen-komponen dan bahasa pemrograman yang
andal, sehingga memungkinkan untuk membuat program aplikasi sesuai dengan
keinginan, dengan tampilan dan kemampuan yang canggih.
Delphi secara resmi diumumkan pada tanggal 14 Februari 1995 dan rilisnya
dilakukan pada tanggal 28 Februari tahun yang sama. Delphi pertama kali dipasarkan
(versi 1.0) berjalan pada Windows 3.0 yang merupakan versi 16 bit, namun tetap
dapat berjalan pada Windows 95.. Versi ini sudah banyak memanfaatkan teknologi
yang baru diperkenalkan oleh Windows 95, seperti ActiveX. Versi 3.0 yang
dipasarkan tahun 1997 jauh lebih maju lagi dengan disertai teknologi Code Inside
yang dapat menampilkan property dan event serta metoda sebuah komponen begitu

25
kita mengetik tanda titik. Pada versi 3.0 telah dilengkapi komponen untuk
membangun aplikasi untuk internet (Internet Browser, E-mail, TCP/IP Socket dan
sebagainya).
2.2.2 Dasar-dasar Pemrograman Delpi 6.0
Delphi menggunakan bahasa ObjectPascal, yaitu bahasa Pascal yang telah
menerapkan teknik OOP (Object Oriented Programming). Pada OOP dikenal
kesatuan bernama object yang merupakan bahan dasar pembangunan program.
Dengan bahan object inilah akan disusun program melewati tahapan-tahaan tertentu,
sebagai berikut :
1. Menyusun sebuah program utama yang akan menentukan kerangka dan alur
program secara garis besar.
2. Menentukan object-object yang akan dipakai untuk melengkapi program dan
menyusun kelompok-kelompok object yang disebut class atau kelas. Dalam
menggunakan suatu object, harus dideklarasikan nama dan jenis object beserta
class-nya.
3. Menentukan pengaturan properti dan kelakuan dari object. Properti adalah ukuran
atau keadaan fisik suatu object, misalnya suatu tombol Button akan mempunyai
properti berupa warna tombol (color), tinggi (height), judul (caption) dan lainnya.
Class adalah suatu tipe data dari jenis user defined, yaitu tipe data yang ada
pada bahasa generasi lanjut. Class memiliki keadaan dalam bentuk data-data maupun
properti dan juga memiliki kelakuan dalam bentuk metode yang dapat berupa

26
procedure atau fungsi. Class bisa dipandang sebagai induk dari banyak object yang
memiliki kemiripan sifat atau merupakan tipe data dari banyak variabel serupa
bernama object. Berikut ini contoh pendeklarasian class dan object :
Type
Tform1 = class (Tform)
Edit1 : TEdit;
Button1 : TButton;
Label1 : TLabel;
Procedure Edit1Change (sender : Tobject);
Procedure Button1Click (sender : Tobject);
End;
Var
Form1 : TForm1;
Pada contoh diatas dijelaskan bahwa TForm1 adalah sebuah class yang
memiliki beberapa variabel atau object yaitu Edit1, Button1, Label1 dan procedure
Edit1Change serta procedure Button1Click. Dan Form1 adalah suatu variabel/object
dengan tipe data kelas TForm1. Begitu pula pada statement Edit1 : TEdit1;
menjelaskan bahwa Edit1 adalah suatu variabel/object dengan tipe data kelas TEdit.
Dan begitu juga Button1 dan Label1. Edit1, Button1 dan Label1 merupakan
variabel/object yang telah didefinisikan oleh Borland Delphi kedalam bentuk
komponen-komponen yang telah tersedia dan tidak perlu dideklarasikan oleh user.
Delphi menyediakan banyak komponen-komponen untuk memudahkan dalam
merancang suatu aplikasi atau program. Sebagai contoh komponen-komponen yang
ada pada Delphi, yaitu :

27
Gambar 2.9 Contoh komponen yang terpasang pada form
Masing-masing komponen tersebut juga memiliki properti dan event handler
yang terdapat pada Object Inspector yang dapat diatur sesuai dengan kebutuhan.
Sebagai contoh disajikan Object Inspector untuk object Button1 :
Gambar 2.10 Contoh Object Inspector dari Button1, Edit1, Label1
Komponen yang terpasang pada form tersebut juga akan terlihat pada object
tree view seperti pada gambar dibawah ini.

28
Gambar 2.11 Object Tree View
2.2.3 Database Desktop Borland Delphi 6.0
Database Desktop adalah suatu aplikasi atau alat untuk membuat dan
mengatur struktur dari database table, dan juga untuk menampilkan dan mengedit
data-data dari suatu database table. Untuk menampilkan Database Desktop pilih
Tools Database Desktop pada menu pulldown Delphi. Delphi dapat mengakses
database table seperti Paradox, dBase, dan SQL format.
Gambar 2.12 Database Desktop

29
2.3 Komponen Hardware
Pembahasan mengenai komponen hardware yang digunakan dalam sistem
adalah komponen utama sebagai pendukung rangkaian driver alat. Komponen
tersebut terdiri dari motor stepper, motor dc motor ac dan sensor infra merah dengan
fototransistor serta komponen pendukung lainnya.
2.3.1 Motor
Motor merupakan suatu perangkat elektromekanik yang berfungsi untuk
menggerakkan sesuatu benda, dimana motor tersebut harus mampu memberikan torsi
maksimum untuk memungkinkan menggerakkan obyek. Banyak jenis motor yang
digunakan, diantaranya motor dc, motor ac, motor stepper. Dalam pembahasan
mengenai motor akan dibahas mengenai motor stepper, motor dc, dan motor ac.
2.3.1.1 Motor Stepper
Motor stepper adalah perangkat elektromekanis yang bekerja dengan
mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Motor stepper bergerak
berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk
menggerakkan motor stepper diperlukan pengendali motor stepper yang
membangkitkan pulsa-pulsa periodik. Penggunaan motor stepper memiliki beberapa
keunggulan dibandingkan dengan penggunaan motor DC biasa. Keunggulannya
antara lain adalah :
1. Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah
diatur.

30
2. Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak
3. Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
4. Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik (perputaran)
5. Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti
pada motor DC
6. Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel
langsung ke porosnya
7. Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang
luas.
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper
dapat dibagi menjadi jenis unipolar dan bipolar. Rangkaian pengendali motor stepper
unipolar lebih mudah dirancang karena hanya memerlukan satu switch / transistor
setiap lilitannya. Untuk menjalankan dan menghentikan motor ini cukup dengan
menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol (ground)
pada salah satu terminal lilitan (wound) motor sementara terminal lainnya dicatu
dengan tegangan positif konstan (VM) pada bagian tengah (center tap) dari lilitan
(perhatikan gambar 2.9).
Gambar 2.13 Motor stepper dengan lilitan unipolar

31
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang
berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan
(A & B) harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan
sebaliknya (perhatikan gambar 2.10). Karena itu dibutuhkan rangkaian pengendali
yang agak lebih kompleks daripada rangkaian pengendali untuk motor unipolar.
Motor stepper bipolar memiliki keunggulan dibandingkan dengan motor stepper
unipolar dalam hal torsi yang lebih besar untuk ukuran yang sama.
Gambar 2.14 Motor stepper dengan lilitan bipolar
Motor Stepper adalah suatu jenis motor listrik yang dirancang untuk
digunakan dalam suatu direct digital control system. Gerakan motor stepper dikontrol
oleh sinyal-sinyal digital yang dibangkitkan oleh suatu sistem digital. Rotor motor
langkah ini tidak oleh sinyal - sinyal digital yang dibangkitkan oleh suatu sistem
digital. Rotor motor langkah ini tidak berputar secara kontinue seperti pada motor AC
maupun DC biasa. Tetapi berputar setahap demi setahap ( step by step ). Secara
umum, setiap pulsa yang diberikan kepada motor langkah akan membuat rotornya
berputar satu langkah searah jarum jam maupun berlawanan arah jarum jam,
tergantung pada sinyal atau pulsa yang diberikan pada stator. Besarnya setiap langkah

32
perputaran motor stepper ini tergantung pada jenis motor yang digunakan, namun
umumnya berkisar antara 0,9 0 sampai 90 0.
Karena rotor sebuah motor stepper berputar setahap demi setahap, motor ini
sering dianggap sebagai suatu alat digital yang mengubah pulsa - pulsa listrik menjadi
gerakan – gerakan mekanis yang sebanding. Kemampuan motor ini dapat mengulang
gerakan – gerakan yang sama dengan baik. Kesalahan langkah yang disebabkan oleh
motor stepper dalam suatu sistem adalah biasanya tidak melebihi 5%. Kesalahan ini
tidak selalu sama tergantung pada berapa jauhnya jarak yang ditempuh ataupun
putaran yang dilakukan. Untuk lebih jelasnya dapat dilihat bagan motor stepper pada
gambar berikut :
Gambar 2.15 Rangkaian dasar Motor Stepper
S
4
S
2
S
1
S
3
B
D
A
C
Gnd

33
Gambar 2.16 Perputaran arah motor stepper
Rangkaian driver motor stepper merupakan bagian yang penting untuk
menjalankan motor. Rangkaian kendali motor stepper ini mempunyai empat fungsi,
yaitu :
1. Menentukan arah putar motor.
2. Menentukan urutan exitasi puataran.
3. Memberikan arus pada kumparan.
4. Menyediakan deenergisasi yang cepat dari setiap kumparan setelah pulsa tidak
diberikan.
Arah Perputaran Motor
Stepper 1800 dapat
berlawanan arah
N
A
B
S
Roto
r
N
S
N N D S B S
N
N
C
A
N N D
S B S
N
N
C
A
Average South
Average North
Perputaran Motor
Stepper 1800 CCW (
Full Step )
Perputaran Motor Stepper 450 CW (
Half Step )

34
2.3.1.2 Motor DC
Sebuah motor dc akan beputar bila diberi tegangan, berputar kekanan bila
diberikan tegangan foward dan berputar ke kiri bila diberikan tegangan reverse
dengan kata lain motor dc akan berputar berlainan arah bila dibalikkan polaritasnya.
Untuk menciptakan hal yang diungkapkan diatas dibutuhkanlah sebuah
rangkaian yang bisa membalikkan polaritas tegangan. Pada Rangkaian ini digunakan
2 buah transitor NPN dan PNP.
Pada Kondisi normal (tanpa sinyal input) kolektor transistor-transistor yang
merupakan output rangkaian akan mengeluarkan 2 tegangan +12V. Untuk
menggerakkan sebuah motor dc dibutuhkan beda potensial diantara dua kolektor
tersebut, dengan memberikan sinyal input pada basis transistor NPN maka transistor
akan melewatkan tegangan 0V dari emitor ke kolektor transistor. Maka untuk
mengerakan motor ke kiri atau kekanan kita hanya memberikan sinyal ke salah satu
basis transitor NPN.
Gambar 2.17 Rangkaian Pengerak Motor DC
Input Input
M1
+VVcc12V
Q4 PNPQ3 PNP
Q2 NPNQ1 NPN
R6100
R5100
R410k
R310k
R2560
R1560

35
Penambang motor dc terdiri dari dua bagian dasar yaitu :
1. Bagian yang tetap/stasioner disebut stator. Stator ini menghasilkan medan
magnet, baik yang dibangkitkan dari sebuah koil (elektromagnet) maupun magnet
permanen.
2. Bagian yang berputar disebut rotor (armature). Rotor ini berupa sebuah koil
dimana arus listrik mengalir.
2.3.2 Motor AC
Dalam prakteknya motor AC ada yang arah putarannya ke kanan, dan ada
yang berputar kekiri. Putaran dapat stabil karena memiliki salah satu jenis stabilizer,
yaitu mekanik atau elektonik. Putaran mekanik memanfaatkan gaya sentrifugal yang
akan melepas saklar pencatu daya pada kecepatan putaran tertentu, misalnya 2400
RPM. Kemudian saklar tersambung kembali walau putaran motor berkurang
kecepatannya.
2.3.3 Sensor
Pada sistem ini akan dipasang sensor. Diinginkan sensor ini peka terhadap
benda ataupun kotak yang melewatinya. Untuk fungsi ini maka lebih baik digunakan
Led Infra Merah dan Phototransistor. Pemilihan tersebut mengingat sensor ini tidak
dapat dengan mudah terpengaruh oleh sensor/cahaya biasa.
2.3.3.1 Sensor Infra Red
Komponen yang dapat menerima infra merah merupakan komponen yang
peka cahaya berupa dioda (photodioda) atau transistor (phototransistor).. Komponen

36
51
Led Infra Merah
Rs
Vd
Vd
ini akan merubah energi cahaya, dalam hal ini energi infra merah, menjadi pulsa-
pulsa sinyal listrik. Komponen ini harus mampu mengumpulkan sinyal infra merah
sebanyak mungkin sehingga pulsa-pulsa sinyal listrik yang dihasilkan kualitasnya
cukup baik. Semakin besar intentitas infra merah yang diterima maka sinyal pulsa
listrik yang dihasilkan akan baik jika sinyal infra merah yang diterima intensitasnya
lemah maka infra merah tersebut harus mempunyai pengumpul cahaya (light
collector) yang cukup baik dan sinyal pulsa yang dihasilkan oleh sensor infra merah
tersebut harus dikuatkan.
Pada dasarnya kerja infra merah sama dengan cara kerja LED jika tegangan
arah maju dikenakan pada infra merah, maka daerah deplesiakan mengecil dan
potensial penghalang jadi rendah akibatnya elektron dari type N akan melewati
sambungan P-N untuk bergabung dengan hole dalam type P. elektron bebas dalam
pita konduksi mempunyai tingkat energi lebih tinggi dari lubang. Jika terjadi
penggabungan berarti elektron turun ke tingkat energi yang lebih rendah. Turunnya
elektron ini membebaskan sejumlah energi cahaya kasat mata sehingga infra merah
dapat mengemisikan cahaya.
Gambar 2.18 Rangkaian Pemancar (Infra Merah)
+ 5 Volt

37
2.3.3.2 Fototransistor
Fototransistor adalah komponen elektronika yang berbentuk transistor dengan
basis terbuka. Fototransistor lebih sensitif terhadap cahaya jika dibandingkan dengan
fotodioda. Perbedaan pokok antara fototransistor dengan fotodioda adalah penguat
dc. Jika pada kedua peralatan tersebut diberikan intensitas cahaya dengan jumlah
yang sama, maka fototransistor akan menghasilkan arus dc yang lebih besar
daripada fotodioda. Makin tinggi sensitifitas dari suatu fototransistor maka
kecepatannya makin rendah. Fototransistor disini digunakan sebagai pasangan dari
inframerah yang berfungsi sebagai pemancar. Berarti fototransistor ini akan bekerja
jika ada informasi dari inframerah. Karakteristik dari fototransistor adalah sebagai
berikut : fototransistor adalah transistor silikon dwi polar NPN dalam kemasan
dengan penutup transparan yang memungkinkan cahaya dapat mencapai sambungan
PN-nya. Arus Emiter dan Colector biasanya sama.
Komponen ini digunakan untuk penyinaran dari led infra merah. Jika
dibandingkan dengan photodioda , fhototransistor menghasilkan penguatan arus yang
lebih besar. Untuk pengendalian dari phototransistor ini dapat divariabelkan tahanan
basisnya, tetapi untuk mendapatkan sensitifitas yang maksimum pada saat diberi
cahaya, maka basisnya dibiarkan terbuka. Jarak antara masing-masing sensor pada
sensor satu, sensor dua dan sensor tiga tidak sama. Untuk menjaganya agar dapat
tetap berfungsi dengan baik, maka nilai resistansi yang diberikan juga berbeda.

38
Gambar 2.19 Rangkaian Penerima (Fototransistor)
2.3.4 Dioda
Dioda merupakan peralatan semi konduktor dua terminal yang mengizinkan
arus untuk mengalirkan hanya ke satu arah, tidak bisa sebaliknya. Arus (tegangan)
bolak-balik diubah menjadi arus searah. Setiap peralatan yang memberikan resistensi
rendah kearus menurut satu arah dan resistensi tinggi pada arah yang berlawanan
dinamakan penyearah. Salah satu bahan tipe – p dan lainnya bertipe– n. Jika dua
bahan semi konduktor terbentuk dan sambungan tunggal disebut dioda.
Pada gambar 2.31 dibawah ini terlihat bahan tipe – p diacu sebagai anoda
dioda, dan bahan tipe – n disebut katoda dioda. Jika kita memasang tegangan listrik
melalui sebuah reistor, anoda positif terhadap katodanya, dan dioda mengalami bias
maju. Sebuah dioda yang mengalami bias maju akan menghantarkan arus dengan
bebas. Jika katoda dioda positif terhadap anodanya, dioda akan mengalami bias balik,
dan akan menjadi beresistensi tinggi bagi arusnya. Contoh dari dioda yang ada seperti
dioda zener, dioda penyearah dan lain-lain.
R 220
R 10 K
R 100 K R 51
IR FT
Tr = BC 107
IC = 74LS14
Out
Gnd
Vcc
+ 5 V

39
Dioda penyearah
Dioda Tunnel
Dioda zener
Dioda backward bias
Dioda varactor
Led
Gambar 2.20 Simbol Dioda
LED
LED adalah singkatan dari Light Emiting Dioda, merupakan komponen yang
dapat mengeluarkan emisi cahaya.LED merupakan produk temuan lain setelah dioda.
Strukturnya juga sama dengan dioda, tetapi belakangan ditemukan bahwa elektron
yang menerjang sambungan P-N juga melepaskan energi berupa energi panas dan
energi cahaya. LED dibuat agar lebih efisien jika mengeluarkan cahaya. Untuk
mendapatkna emisi cahaya pada semikonduktor, doping yang pakai adalah galium,
arsenic dan phosporus. Jenis doping yang berbeda menghasilkan warna cahaya yang
berbeda pula.
Gambar 2.21 Simbol LED
N
P
Anoda Anoda
Katoda Katoda

40
Pada saat ini warna-warna cahaya LED yang banyak ada adalah warna merah,
kuning dan hijau.LED berwarna biru sangat langka. Pada dasarnya semua warna bisa
dihasilkan, namun akan menjadi sangat mahal dan tidak efisien. Dalam memilih LED
selain warna, perlu diperhatikan tegangan kerja, arus maksimum dan disipasi daya-
nya. Rumah (chasing) LED dan bentuknya juga bermacam-macam, ada yang persegi
empat, bulat dan lonjong.
2.3.5 IC 74LS14
Kemajuan teknologi pada masa sekarang telah berkembang dengan pesatnya
terutama di bidang elektronik. Beberapa produk dari kemajuan teknologi tersebut
adalah peralatan digital, misalnya : kalkulator, jam digital, dan yang terakhir adalah
komputer yang telah banyak memasuki dunia pasaran.
Peralatan tersebut pada prinsipnya dirancang dan dibuat berdasarkan
rangkaian-rangkaian logika yang berisi elemen-elemen logika. Rangkaian tersebut
adalah integrated circuit (IC). Salah satu jenis keluarga IC tersebut adalah transistor-
transistor logic (TTL) yang berisi rangkaian-rangkaian logika dengan menggunakan
transistor.
IC ini sering disebut juga dengan penjungkir penyulut Schimit Trigger
berenam, dimana pada satu IC ini terdapat 6 pintu masukan dan 6 pintu keluaran data.
Jadi masing-masing masukan terdapat satu keluaran data. IC 74LS14 ini digunakan
untuk mengkonversikan sinyal analog pada suatu keluaran sehingga nantinya
keluaran pada IC ini telah membentuk sinyal-sinyal digital, dan sinyal inilah yang
nantinya diumpamankan ke Port Parallel sebagai adanya proses input yang terjadi.

41
Alternatif penggunaan IC ini sebagai analog to digital converter adalah karena
masukan yang diperlukan bagi suatu alat/rangkaian hanya satu bit data, jadi konversi
dapat berlangsung dengan cepat dan singkat sehingga memungkinkan terjadinya
koefisien waktu delay bagi alat. Pada gambar dibawah menggambarkan pin-pin IC
74LS14 pengkonversi sinyal analog tersebut.
Gambar 2.22 Layout Pin IC 74LS14
VCC 6A 6Y 5A 5Y 4A 4Y
1A 1Y 2A 2Y 3A 3Y GND
1 2 3 4 5 6 7
8 9 10 11 12 13 14

42
BAB III
ANALISA DAN HASIL
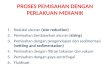
3.1 Context Diagram
Untuk menggambarkan sistem yang dirancang adalah dengan menentukan
context diagram. Berikut ini yaitu gambar 3.29 merupakan context diagram yang
dimaksud, dimana terdiri atas sebuah lambang proses yang diberi nama Dyring
Grinding System dengan label 0. Sesuai dengan namanya proses ini nantinya
mendapatkan input berupa modul dephi dan input dari sinyal sensor, dimana sinyal
sensor dan input dari modul delphi ini akan diolah menjadi informasi atau sebagai
dasar untuk mengaktifkan motor stepper, motor dc, dan motor ac.
Gambar 3.23 Contex Diagram
0
Drying
Grinding
System
Modul
Delphi
Sensor Sinyal Analog
Data Input
Port I/O
Motor
Stepper Motor
DC
Signal gerak Signal gerak
Monitor/
Operator
Data Click mouse, Data
Kopi digiling
Printer
Data Click
Mouse,
Data Input
Sensor
Inst Pencuplikan dan
regulasi data input,
Inialisasi Port
Info Jumlah
Penggilngan
Menu Tampilan,
Info Jumlah
Penggilingan
4-bit putar Motor
Stepper, 2-bit putar
motor dc
4-bit putar Motor
Stepper, 2-bit putar
motor dc
Motor
AC
Signal gerak

43
Proses tersebut berinteraksi dengan beberapa entity yaitu modul delphi,
sensor, motor stepper, motor dc, port I/O, monitor/operator, dan database.
1. Pertama disebut sebagai modul delphi yaitu bagian yang berfungsi untuk
memberikan instruksi, sebagai input, regulasi data, kirim bit data ke port, dan
inialisasi port.
2. Kedua disebut sebagai sensor yaitu bagian yang memberi data input yakni
sinyal analog.
3. Ketiga disebut sebagai motor stepper yaitu bagian yang berfungsi untuk
menggerakkan belt conveyor.
4. Keempat disebut sebagai motor dc yaitu bagian yang berfungsi untuk
menggerakkan katup pembuka penutup.
5. Keempat disebut sebagai motor ac yaitu bagian yang berfungsi untuk
menggerakkan simulasi mekanika penggilingan biji kopi.
6. Kelima disebut sebagai port I/O yaitu bagian yang berfungsi sebagai interface
yang akan menghubungkan port parallel dengan motor stepper dan motor dc
dengan pengiriman data output 8-bit dari buffer kemudian akan dikirimkan
lagi data output 4-bit untuk sebuah motor stepper, 2-bit untuk motor dc dan 1-
bit untuk motor ac serta menghubungkan port parallel dengan rangkaian
sensor 1-bit data untuk sebuah buah rangkaian sensor.
7. Keenam disebut sebagai monitor/operator yaitu bagian yang berfungsi untuk
menampilkan instruksi-instruksi dan cuplik data click mouse.
8. Kedelapan disebut sebagai printer yang digunakan untuk mencetak.

44
3.2 Data Flow Diagram (DFD) Level 0
Pada sub bab ini dijabarkan mengenai DFD (Data Flow Diagram) yang
merupakan uraian yang lebih terinci dari sistem yang dirancang. Adapun gambar 3.44
berikut DFD level 0 dari drying grinding system pada sebuah penggilingan biji kopi.
DFD tersebut diuraikan berdasarkan Contex Diagram yang telah dijabarkan
sebelumnya.
Gambar 3.24 Data Flow Diagram Level 0
Operator/
Monitor
1.0
Regulasi
Input dari
Operator
Data Click Mouse,
Data Kopi digiling
2.0
Pencuplikan
Input Oleh
Modul Delphi
Data Click Mouse
3.0
Klasifikasi
Instruksi
Modul
Delphi
Sensor
6.0
Dikonversi
Oleh IC
74LS14
Sinyal
Analog
7.0
Pembu
fferan
Data Click
Mouse,
Data Input
Sensor
Inst Pencuplikan dan
regulasi data input,
Inialisasi Port
Inst Pen-
cuplikan data
Inst Tampilan
Menu
5.0
Menampilkan
Menu, Info
Jumlah
Penggilingan
Menu Tampilan,
Info Jumlah
Penggilingan
Printer
Info Jumlah
Penggilingan 8.0
Pembuatan
Laporan
Penggilingan
Instruksi Pembuatan
Laporan
Lap. Jumlah
Penggilingan
Sinyal Digital data
Input 1-Bit
Sinyal digital Data
input 1-Bit
4.0
Meng-
inialisasikan
Port
Inst
Inialisasi Port
Inst. inialisasi,
8-Bit
Inialisasi
File Kopi
rekaman
jumlah kopi 9.0 Catat dan
Rekam
Data Kopi
Digiling
Data Kopi
Digiling
Data Kopi
Digiling 12.0
Menentukan
Nilai Putar dan
lama waktu
putar motor dc
dan motor ac
10.0
Menentukan
nilai Putar dan
lama Waktu
Putar motor
stepper
Inst. Nilai Putaran
dan lamanya putaran
Inst. Nilai Putaran
dan lamanya putaran
4-bit putar
Motor Stepper
2-bit putar motor
dc, 1-bit putar
motor ac
Port
I/O
4-bit putar
Motor
Stepper,
2-bit putar
motor dc,1-bit
putar motor ac
4-bit putar
Motor
Stepper,
2-bit putar
motor dc, 1-bit
putar motor ac
11.0 Gerakk
an
Motor
Stepper
4-bit putar
Motor
Stepper
Motor
Stepper
Signal gerak
13.0 Gerakkan
Motor DC
dan Motor
AC
2-bit gerak
kiri/kanan, 1-bit
gerak kanan
Motor
DC
Signal gerak
Motor
AC
Signal gerak

45
Dari gambar 3.30 tersebut diatas dapat di jelaskan bahwa, pada saat program
dijalankan sistem belum diaktifkan artinya output dan input belum diaktifkan.
Operator berfungsi untuk mengaktifkan sistem dengan memberikan instruksi dan data
ke modul delphi. Dalam hal ini input dari operator akan di regulasikan yang
kemudian akan di klasifikasikan. Data yang telah diklasifikasikan tersebut akan
diproses oleh modul delphi.
Modul delphi akan memproses data input yang telah didapatkan. Berdasarkan
instruksi modul delphi tersebut akan dikirim data ke port parallel melalui port I/O
dimana dengan adanya pembufferan pada port I/O, maka seleksi pengiriman bit data
akan dapat dianalisa oleh port I/O sehingga didapatkan data sebanyak 4-bit data
output untuk motor stepper dan 2-bit data output untuk motor dc serta 1-bit data
output untuk motor ac. Data yang dikirimkan sebanyak 4-bit dan 2-bit dan 1-bit
tersebut akan diterima oleh port parallel untuk diterjemahkan yang kemudian akan
dikirimkan ke rangkaian motor stepper untuk menggerakkan belt conveyor, ke
rangkaian motor dc untuk menggerakkan katup penutup dan ke motor ac untuk
menggerakkan mekanik penggilingan biji kopi. Dalam hal ini buffer akan menyimpan
sementara seluruh instruksi yang masuk dan keluar, selanjutnya modul delphi akan
mengambil dan memproses data dari buffer untuk mendapatkan keputusan sesuai
dengan instruksi program yang dirancang oleh user.
Sensor dalam hal ini berfungsi sebagai counter untuk menghitung jumlah
kotak yang lewat diatas belt conveyor. Jadi, ketika sensor mendapatkan sinyal listrik,
maka sinyal tersebut akan diteruskan menuju rangkaian driver sensor. Kemudian dari

46
rangkaian sensor tersebut akan ditentukan apakah sinyal yang didapatkan berupa
tegangan aktif “high” atau “low”, jika tegangan yang didapatkan adalah tegangan
high maka tegangan tersebut akan dikonverterkan oleh IC 74LS14 sebagai converter
logic menjadi low. Sebagai contoh apabila input dari sensor mengeluarkan sinyal
analog 5 Volt maka sinyal ini akan diteruskan ke rangkaian sensor dan
dikonverterkan oleh IC 74LS14 menjadi keluaran sinyal digital yang berlogika 0
(Off) menuju port parallel, sebaliknya input dari sensor mengeluarkan sinyal analog 0
volt maka sinyal ini akan diteruskan ke rangkaian sensor dan dikonverterkan oleh IC
74LS14 menjadi keluaran sinyal digital yang berlogika 1 (On) menuju port parallel.
Sinyal ini akan diproses oleh modul delphi dan disimpan ke dalam database.
3.3 Rancangan Fisik
Simulasi drying grinding system merupakan perpaduan antara software dan
hardware. Alat yang dibuat merupakan sebuah simulasi atau prototype dan miniatur
dari sebuah sistem yang sesungguhnya, dimana sistem ini diharapkan dapat
diterapkan pada keadaan yang sebenarnya.
Perancangan awal untuk memulai proyeksi rancangan fisik terhadap simulasi
dyring grinding system ini, dapat dinilai dari sudut pandang atau aspek kemampuan
mekanik utama terhadap rutinitas kerja suatu sistem. Misalnya kemampuan kerja
sebuah motor stepper untuk mengendalikan beban yang akan diproyeksikan.
Simulasi drying grinding system ini, dirancang dan ditempatkan pada sebuah
tempat penggilingan biji kopi. Pada alat ini terdiri dari sensor sebagai counter untuk
penghitungan jumlah kotak yang lewat, motor dc digunakan untuk menggerakkan

47
mekanik katup pembuka dan penutup serta simulasi mekanik penggilingan kopi dan
motor stepper untuk menggerakkan belt conveyor.
Miniatur pembuatan alat ini terdiri dari unsur besi, seng, dan kayu.
Sebagaimana kita ketahui bahwa miniatur alat ini dibuat untuk mensimulasikan
proses penggilingan pada biji kopi, dimana menyerupai keadaan yang sebenarnya.
Desain pembuatan miniatur ini, didesain sedemikian rupa dengan tujuan agar proses
penggilingan dapat terwujud. Berikut gambar 3.32 merupakan rancangan secara fisik
alat yang dibuat.
Gambar 3.25 Rancangan Fisik Alat
Belt Conveyor
Motor Stepper
Regulasi Input
dari Operator
er
Motor AC
Motor DC
Interface
Port Parallel DB-
25 Pins
Komputer
Tempat
Pencurahan Biji
Kopi
Tempat
Penggilingan biji
kopi
Sensor counter
Motor AC (mekanik
Penggilingan)
Tempat
penampungan
Hasil Penggilingan
biji kopi

48
Pada gambar 3.32 tersebut diatas dapat dijelaskan bahwa tempat pencurahan
biji kopi tersebut terbuat dari unsur seng. Tempat pencurahan biji kopi ini di buat
sedemikian rupa agar dapat berfungsi sebagai penampung sementara kopi yang akan
di giling. Tempat pencurahan biji kopi ini, dibagian bawahnya di beri katup penutup
dan pembuka untuk tempat keluarnya biji kopi menuju ke tiap kotak-kotak yang
berada diatas conveyor. Jadi sewaktu-waktu katup ini akan menutup dan membuka
berdasarkan logika program yang di set oleh user.
Belt Conveyor tersebut terbuat dari bahan karet atau kain yang dapat menahan
kotak yang ada diatasnya. Dimana tiap-tiap kotak tersebut akan berisi biji kopi yang
telah dicurahkan atau diisi yang kemudian akan di umpankan ke tempat penggilingan.
Setelah diumpankan biji kopi tersebut ke tempat penggilingan, selanjutnya
adalah proses penggilingan. Tempat penggilingan kopi tersebut dirancang berbentuk
bundar dimana dibagian bawahnya di beri lobang-lobang yang berfungsi untuk
keluarnya biji kopi yang telah hancur sehingga biji kopi yang telah hancur akan turun
melalui lobang-lobang penyaring tersebut.
Pada saat biji kopi tersebut telah diumpankan ke tempat penggilingan maka
motor dc akan menggerakkan mekanik penggiling yang berbentuk bundar dimana
dibagian bawahnya terdapat roda-roda dan pisau-pisau yang berfungsi untuk
menggiling dan menghancurkan biji kopi yang telah melalui proses perendangan.
Mekanik penggilingan biji kopi ini akan berputar sesuai dengan instruksi program.
Bagian dibawah tempat penggilingan biji kopi, terdapat media penampung biji kopi
yang telah hancur.

49
Sensor ditempatkan disisi kiri dan kanan conveyor, dimana sensor tersebut
diletakkan dibagian ujung dari conveyor tersebut, sehingga apabila kotak yang telah
terisi bahan mentah biji kopi akan melewati sensor maka pada saat kotak tersebut
melewati sensor maka akan dihitung jumlah kotak yang lewat.
3.4 Pembuatan Alat
Dalam pembuatan alat ini ada beberapa hal yang penting, yang perlu
diperhatikan adalah menyangkut pemilihan dan pemasangan komponen.
Yang pertama adalah pemilihan dan pembuatan jalur PCB. Pilihlah PCB yang
mempunyai ketebalan lapisan tembaga serta utuh artinya tidak bolong-bolong,
kemudian pembuantanya adalah harus lebih teliti. Karena dikhawatirkan jalur
tersebut bersentuhan dengan yang lainya, dan juga tentang kerapian mendesain jalur
PCB.
Yang kedua adalah didalam memilih komponen di pasaran. Pilihlah
komponen yang baik. Untuk bahan percobaan gunakan komponen yang mempunyai
toleransi nilai yang rendah, agar resiko kesalahan dapat diminimalkan. Setelah
berhasil maka pasang komponen yang sebenarnya menurut kebutuhan masing-masing
driver alat tersebut.
Yang ketiga adalah dalam memasang komponen lakukan pengukuran yang
tepat dan perhatikan positif negatifnya kaki-kaki komponen. Kecuali komponen yang
kakinya sama bolak-balik (seperti resistor dan kapasitor pico). Dalam hal ini yang
paling penting adalah pengukuran Transistor yakni menentukan Basis, Emitor dan
Colektor.

50
3.5 Analisa Driver
Pada analisa driver ini, menggambarkan diagram block rangkaian sebagai
pengendali alat. Analisa dibawah ini akan membahas 4 block utama pada rangkaian
alat yaitu driver sensor dan motor stepper, driver motor dc dan driver motor ac.
3.5.1 Rangkaian Sensor Infra Red Dan Fototransistor
Gambar rangkaian dibawah ini adalah penggabungan antara infra red dan
fototransistor yang siap menerima dan mengirim sinyal logic ke port paralel interface.
Rangkaian sensor ini terdiri dari beberapa komponen yaitu Resistor 51 Ohm,
10 Kilo Ohm, 100 Kilo Ohm dan 220 Ohm, Transistor tipe BC 107, Fototransistor
Led infra merah.
Adapun prinsip kerjanya dari rangkaian sensor ini adalah cahaya LED Infra
Merah mengenai permukaan Fototransistor, maka tegangan 5 Volt Dc dari power
supply akan diteruskan dan dibuang ke ground melalui Fototransistor dari kaki
colector ke emitor. Kemudian tegangan basis pada Transistor BC 107 adalah 0 Volt
R 220
R 10 K
R 100 K R 51
IR FT
Tr = BC107
107 107
IC = 74LS14
Out
Gnd
Vcc
+ 5 V
Gambar 3.26 Driver Sensor infra Red dan Fototarnsistor

51
yang menyebabkan transistor tersebut tidak bekerja maka tegangan +5 Vcc akan
diteruskan ke IC 74LS14 sehingga keluaran IC 74LS14 ke Port adalah 0. Dan jika
cahaya LED Infra Merah terhalang dan tidak mengenai Fototransistor, maka tegangan
+5 Vcc akan dibuang ke transistor BC 107 melalui kaki colector ke emitor. Kemudian
tegangan basis pada Fototransistor adalah 0 Volt yang menyebabkan fototransistor
tersebut tidak bekerja maka tegangan yang menuju ke IC 74LS14 adalah 0 Volt,
sehingga keluaran Dari IC tersebut menuju ke port adalah 1.
Pada saat led infra red terhalang dan tidak mengenai fototransistor maka
tegangan +5 Vcc akan maka dibuang ke transistor BC 107 melalui kaki colector ke
emitor. Kemudian tegangan basis pada Fototransistor adalah 0 Volt yang
menyebabkan fototransistor tersebut tidak bekerja maka tegangan yang menuju ke IC
74LS14 adalah 0 Volt, sehingga keluaran Dari IC tersebut menuju ke port adalah 1
dimana tegangan antara basis-emitor pada saat input berlogika satu berkisar 0,4 volt
dan tegangan antara colektor-emitor pada saat input berlogika satu berkisar 2,2 volt.
Sedangkan tegangan antara basis-emitor pada saat input berlogika nol berkisar 0,8
volt dan tegangan antara colektor-emitor pada saat input berlogika nol berkisar 0,1
volt.
Pada kondisi diatas, aplikasi yang dirancang pada simulasi dyringh grinding
system ini, membutuhkan aktif high untuk keluaran menuju port, maka apabila
cahaya led infra merah terhalang dan tidak mengenai Fototransistor maka logika
keluaran dari BC 107 adalah 0 dan diconverterkan oleh IC 74LS14, sehingga
keluaran menuju port interface akan berlogika 1.

52
Pada alat ini, sensor berfungsi sebagai counter untuk menghitung setiap kotak
yang lewat, apabila sensor tersebut terhalang oleh kotak artinya led infra red
terhalang dan tidak mengenai fototransistor maka tegangan +5 Vcc akan dibuang ke
transistor BC 107 melalui kaki colector ke emitor. Kemudian tegangan basis pada
Fototransistor adalah 0 Volt yang menyebabkan fototransistor tersebut tidak bekerja
maka tegangan yang menuju ke IC 74LS14 adalah 0 Volt, sehingga keluaran Dari IC
tersebut menuju ke port adalah 1. Keluaran dari IC tersebut adalah logika satu yang
menyebabkan port parallel mendapatkan tegangan high dan modul program akan
menambahkan informasi ke display dan menyimpan ke database bahwa kotak telah
terhitung satu, kemudian jika ada kotak kedua yang melewati sensor tersebut maka
akan terhitung dua dan begitu seterusnya.
3.5.2 Rangkaian Motor Stepper
Didalam perancangan alat simulasi drying grinding system ini, motor stepper
sangat berperan penting dalam menggerakkan belt conveyor. Disini dijelaskan bahwa
bentuk dasar dari motor stepper yang paling sederhana hanya terdiri dari sebuah rotor,
yang merupakan sebuah magnet permanen dan sebuah stator yang dililiti kumparan,
sehingga dapat membentuk medan listrik. Jika stator diberi arus listrik, sisi-sisi rotor
akan membentuk kutub-kutub magnet. Jika kutub magnet stator dan rotor sama, maka
kedua magnet akan saling tolak-menolak sehingga mengakibatkan rotor berputar.
Arah perputaran ini dapat dua arah, tergantung dari faktor mekanik motor stepper itu
sendiri. Besarnya perputaran adalah 360 derajat.

53
Rangkaian driver penggerak motor stepper ini terdiri dari beberapa komponen
utama yakni Resistor 330 Ω, Dioda Zenner 12V dan Transistor D313. Dimana pada
transistor, kaki basis transistor diberi tahanan untuk membatasi tegangan yang terlalu
besar. Emitor transistor dihubungkan ke ground. Sedangkan kaki colektor inilah yang
dimanfaatkan untuk menggerakkan motor stepper. Tegangan masukan +12 V melalui
dioda zenner 12 V, dioda ini diperlukan untuk mencegah terjadinya kerusakan pada
transistor.
D313
D313
D313
D313
R330
R330
R330
R330
Z12V
Z12V
Z12V
Z12V
In
In
In
In
Port A
Port B
Port C
Port D
+ 12 Volt
Out A
Out B
Out C
Out D
A B
C D
Gnd Motor
Stepper
Gnd
Gambar 3.27 Rangkaian Block Driver Motor Stepper

54
+12V
In In
M1
PNPPNP
NPN NPN
100100
10k 10k
560 560
Pada alat simulasi drying grinding system, membutuhkan 4 buah transistor
D313 sebagai penguat masing-masing kaki pada motor stepper, karena untuk
menggerakkan belt conveyor.
Motor stepper mempunyai 4 output ke port parallel untuk satu motor stepper
dimana masing-masing output motor steppper apabila mendapatkan input logika satu,
tegangan antara basis-emotir berkisar 0,7 volt. Sebaliknya apabila input mendapatkan
logika nol maka tegangan antara basis-emitor berkisar 0,2 volt.
3.5.3 Rangkaian Motor DC
Pada rangkaian ini digunakan 2 buah transistor NPN dan PNP. Pada kondisi
normal (tanpa sinyal input) kolektor transistor yang merupakan output rangkaian akan
mengeluakan 2 tegangan +12V. Sedangkan untuk menggerakan motor dc dibutuhkan
beda potensial diantara dua kolektor tersebut.
Dengan memberikan sinyal input pada basis transistor NPN maka transistor
akan melewatkan tegangan 0V dari emitor ke kolektor transistor. Maka untuk
menggerakan motor ke kiri atau ke kanan kita hanya memberikan sinyal kesalah satu
basis transitor NPN.
Gambar 3.28 Rangkaian Motor DC

55
3.5.4 Rangkaian Motor AC
Pada rangkaian relay terdiri atas dioda, resistor, transistor, dan relay yang
berfungsi untuk melewatkan sinyal AC 220V yang dihubungkan dengan lampu yang
akan dikontrol.
Apabila rangkaian relay mendapat sinyal high (logika 1) dari komputer berarti
sinyal akan menuju ketransistor C828 sehingga n kolektor dan emitter akan
terhubung, ground relay menjadi terhubung kemudian relay 12 V akan aktif untuk
menghubungkan tegangan AC 220V yang dipasang pada relay tsb, hal ini merupakan
prinsip rangkaian transistor yang difungsikan sebagai switch atau saklar.
3.6 Rancangan Driver Secara Keseluruhan
Pada rancangan driver secara keseluruhan adalah penggabungan antara
rangkaian sensor, rangkaian motor stepper, rangkaian motor dc, motor ac dan
Input
R1
220
5V Relay
5V VCC +V
Q1
NPN
D1
1N4002
Gambar 3.29 Rankaian Relay

56
interface port paralel. Ketiga bagian ini telah dirancang dalam satu paket yang yang
dikenal sebagai driver alat.
Gambar 3.30 Rangkaian secara Keseluruhan
R 220
R 10
K
R 100 K R 51
IR FT Tr = BC107
107 107
IC = 74LS14
Out
Gnd
Vcc + 5 V
+12V
In In
M1
PNP PNP
NPN NPN 100 100
10k 10k 560 560
13 11 12 10 9 8 7 6 5 4 1 2 3
25 23 24 22 21 20 19 18 17 16 15 14
Input
R1
220
5V Relay
5V VCC
+V
Q1
NPN
D1 1N40
02

57
3.6.1 Prinsip Kerja Rangkaian Keseluruhan
Pada port parallel mempunyai 8 pin untuk data output dan 5 pin untuk data
input. Data output mulai dari D0 sampai D7 pada pin 2 sampai pin 9.
Sensor dalam hal ini digunakan sebagai counter untuk menghitung jumlah
kotak yang lewat. Input port yang dipakai oleh sensor ini adalah pada pin 11 DB-25,
dengan kode masuk yang diterima oleh hardware komputer adalah 40. Sensor
dengan kode angka yang diterima, merupakan logika 1 (aktive high), maka kode
inilah yang diproses oleh program untuk mendapatkan keputusan berdasarkan
program yang dibuat.
Selanjutnya pada driver motor stepper menggunakan pin-out (D0-D3) sebagai
transfer data menuju driver motor. Karena pada rancangan alat ini menggunakan 1
motor stepper untuk menggerakkan Belt Conveyor secara bergantian menurut set
waktu delay yang diberikan, maka pin 2 sampai pin 5 pada port paralel dimanfaatkan
untuk motor stepper. Satu motor stepper 4 kaki input, dengan demikian pengiriman
sinyal dimulai dari kaki A sampai kaki D secara kontinuitas akan menghasilkan
gerakan putar 3600. Kecepatan putar motor stepper dapat diset sesuai dengan
kebutuhan kita, pada program disediakan set delay (selisih waktu) melalui procedure
timer.
Motor DC berperan untuk membuka dan menutup katup pada tempat
pencurahan biji kopi ke masing-masing kotak. Motor DC mempunyai 2 input pada
rangkaian dimana untuk input pertama digunakan untuk berputar ke kiri dan input

58
kedua digunakan untuk berputar ke kanan, maka pin 6 dan pin 7 pada output port
parallel dimanfaatkan untuk motor dc.
Motor AC juga berperan dalam sistem ini, dimana motor ac berfungsi untuk
menggerakkan simulasi mekanik dari penggilingan biji kopi. Motor ac mempunyai 1
input. Input pertama digunakan untuk input berputar ke kanan, maka pin 8 pada
output port parallel dimanfaatkan untuk motor ac.
3.7 Rancangan Program
Setelah dilakukan perancangan bentuk alat yang diinginkan serta
membangunya secara perangkat keras, selanjutnya dilakukan perancangan modul
program untuk menunjang beroperasinya alat yang dirancang. Untuk merancang
modul program tersebut ada dua tahapan yaitu menentukan logika dasar program dan
menterjemahkannya menjadi sebuah modul program.
3.7.1 Logika Dasar Program
Ada banyak alat untuk menguraikan logika yang mendasari program. Pada
penulisan ini alat yang digunakan adalah Flow Chart.
Inialisasi Port
PortOut:=$378
PortIn:=$379
1
START

59
For I=1 to 4 do
PortOut($378,$10);
Motor DC
For J=1 to 30 do
PortOut($378,$01);
PortOut($378,$02);
PortOut($378,$04);
PortOut($378,$08);
Motor Stepper
For J=1 to 100 do
PortOut($378,$30);
Motor AC
2
Baca
Sensor
Sensor = 40
Ya
Tidak
1
Jumlah Masuk,
Kondisi kopi
If Tombol
On DiTekan
Ya
Tidak PortOut($378,$00)

60
Inisialisasi tersebut diatas adalah menggambarkan untuk awal kerja sistem
dengan urutan pembacaan logika secara berkesinambungan. Pada intinya yang harus
diset terlebih dahulu adalah pengenalan function Portin dan Portout, karena ini
menyangkut sinyal handshaking antara hardware alat dengan komputer melalui
interfacenya. Dalam hal ini interfacenya adalah Paralel Port DB-25 Pins. Kemudian
setelah inisalisasi dilakukan, langkah selanjutnya mengikuti instruksi yang ada di
tampilan menu, dimana dilakukan penekanan tombol on. Untuk langkah selanjutnya
adalah proses yang akan dilakukan adalah sebagai berikut.
Pertama : Pada saat instruksi pada menu telah dilaksanakan , artinya bahwa tombol
On telah di klik maka proses akan berjalan sesuai dengan instruksi.
Gambar 3.31 Flow Chart
Vkotak=100
Count =0
Hcount=Count+1
JumKbk=Hcount*Vkotak
Hcount,JumKbk, totals
End
2
Laporan

61
Kedua : Ketika tombol On pada button di Klik maka motor dc akan memutar
mekanik untuk pencurahan biji kopi ke masing-masing kotak yang ada
diatas Belt Conveyor. Lamanya perputaran motor dc dalam membuka
katup tersebut diset berdasarkan procedure delay dan instruksi perulangan
yang telah di set. Pada saat katup tersebut terbuka maka biji kopi tersebut
akan turun ke bawah dan mengisi biji kopi ke kotak yang telah
disediakan.
Kedua : Setelah kotak pertama telah terisi maka program akan menginstruksikan
motor dc untuk menutup katub tersebut. Pada saat katub tersebut tertutup
maka program akan menginstruksikan motor stepper bergerak horizontal
untuk mengisi kotak kedua. Lamanya waktu yang perlukan motor stepper
ini berputar telah di set berdasarkan procedure delay dan instruksi
perulangan yang telah di set sehingga pada saat motor stepper tersebut
berhenti maka kotak kedua tepat berada diatas katup untuk pengisian
selanjutnya.
Ketiga : Setelah kotak tersebut diisi maka sensor akan mendeteksi kotak yang
lewat menuju tempat penggilingan. Pada saat sensor mendeteksi adanya
kotak yang lewat maka sensor akan mengcounter jumlah kotak tersebut
dimana Vkotak=100, Count=0, Hcount=Count+1,
JumKbk=Hcount*Vkotak. Jadi dengan adanya pendeteksian jumlah
kotak, maka sistem ini akan mendapatkan informasi jumlah yang
dihasilkan. Ketentuan spesifikasi kotak adalah adalah berbentuk segi

62
panjang dengan set constanta untuk Volume setiap kotaknya misalnya
adalah 100 m3 .
Keempat : Setelah sensor mengcounter jumlah produksi tersebut maka akan
disimpan ke dalam database.
Kelima : Kemudian selang waktu antara perputaran motor dc dan motor stepper
berputar, dengan perulangan procedure tersebut yang telah di set serta
delay yang telah ditentukan sehingga tempat penggilingan tersebut telah
berisi cukup banyak biji kopi maka program akan menginstruksikan
motor dc untuk menggerakkan simulasi mekanik penggilingan. Setelah
proses penggilingan selesai maka instruksi akan kembali ke instruksi
pertama yaitu menggerakkan motor dc untuk membuka katup penutup.
3.7.2 Rancangan Modul Program Borland Delphi 6.0 Untuk Simulasi Drying
Grinding System
Pada sub bab ini diuraikan mengenai modul program tersebut terbagi dalam
procedure-procedure, diamana tiap procedure tersebut memiliki fungsi tersendiri
seperti untuk membuat Tampilan Menu, Test Sensor (Sensor 1),Test Motor Stepper,
Mengaktifkan Alat dan Laporan Data Base. Adapun penjelasan masing-masing
tersebut diatas adalah sebagai berikut:
a). Desain Menu Tampilan
Program yang dirancang mengembangkan sistem menu untuk tujuan
memudahkan para pengguna sistem ini yang nantinya akan berinteraksi dengan
sistem yang dirancang. Pada perancangan program ini menggunakan bahasa

63
pemrograman Borland Delphi Versi 6.0, dimana struktur programnya berada dalam
satu modul. Adapun modul tersebut telah terangkum seluruh statement yang
diperlukan untuk seluruh kegiatan otomatis dari alat ini, seperti inisialisasi
(pembacaan) port, baik statement input port maupun output port, proses pembacaan
nilai yang dipengaruhi oleh sensor, dan proses perintah setelah pembacaan port input
untuk menjalankan sistem.
Berikut ini listing dari block program yang berhubungan dengan bentuk
tampilan form satu dengan yang lain adalah tampilan Menu Utama. Tampilan listing
program menu dan tampilan menu utama dapat dilihat dibawah ini :
-----------------
-------------------
procedure TForm1.image12Click(Sender: TObject);
begin
Form1.hide;
Form2.Show;
end;
Sampai dengan ....................
----------------------
------------------------
Pada procedure tform1.image2click(sender:tobject) diatas adalah
menerangkan cara pemanggilan ke menu utama, yaitu pada form1.hide adalah form
pembuka yang apabila diklick image2 tersebut maka form pembuka akan
tersembunyi dam form2 show adalah form program utama yang apabila image2
tersebut di klik maka form2 ini akan dimunculkan. Berikut ini adalah tampilan menu
utama.

64
Gambar 3.32 Rancangan Tampilan Menu Utama
Pada tampilan tersebut diatas pemilihan pertama kali adalah mengentrykan
data diantaranya adalah Jenis, Tanggal, Keterangan, jumlah yang masuk. Pada
gambar diatas terdiri dari button aktif on, aktif off dimana button tersebut berfungsi
untuk mengaktifkan sistem dan menonaktifkan sistem. Jadi pertama kali yang harus
dilakukan pada program utama ini adalah mengentrykan data yaitu data jenis, tanggal,
keterangan, jumlah kopi yang masuk.
b). Test Sensor

65
Pada sub bab ini, untuk rancangan test sensor ada tiga macam, ketiganya agar
sensor dapat diterima interface, maka harus berlandaskan syntax function
Assembler seperti yang ada dibawah ini yakni :
Pada perancangan pembacaan port paralel diatas dibuat dalam satu function
sehingga dalam setiap pembacaan nilai pin input yang diterima dilakukan secara terus
menerus selama proses berlangsung. Mov dx, ax merupakan statement untuk menset
alamat port , sedangkan in al, dx merupakan statement untuk menerima nilai sinyal
yang masuk dari pin input. Pada pembagian pin input disini menggunakan 1 pin,
yakni pin 10. Pin ditempati oleh sensor sebagai sinyal data input program
Procedure TOpeasiAlat.TimerCountKotakTimer(Sender: TObject) adalah
procedure untuk perhitungan counter jumlah kotak yang lewat. Vkotak adalah volume
kotak yang diset secara manual sebanyak 100 kg per tiap kotaknya. Count
diinialisasikan sebagai portin($379) dimana Portin($379) adalah pengalamatan
terhadap data input pada port parallel. Count tersebut bernilai 168 dimana nilai count
ini merupakan kode yang diterima komputer pada pin 10 port parallel. Hcount adalah
jumlah perhitungan counter kotak yang lewat dimana procedure tersebut akan
mengalami perulangan sehingga setiap kali sensor terdeteksi maka procedure ini akan
menghitung 1 dan terus bertambah satu. Kemudian Total akan langsung menghitung
jumlah kotak yang lewat dengan cara total:=Hcount*Vkotak artinya jumlah counter
dikali dengan jumlah volume tiap-tiap kotak tersebut.
c). Motor Stepper

66
Pada sub baba ini, untuk rancangan test motor stepper ada dua macam,
keduanya agar motor stepper dapat dikenal interface, maka harus berlandaskan
syntax procedure Assembler seperti yang ada dibawah ini yakni :
Procedure PortOut(Inport :Word; Value :Byte); Assembler;
Asm
xchg ax,dx
out dx,al
Pada procedure program diatas digunakan untuk pengiriman sinyal pada pin
output sehingga modul dephi dapat mengirim sinyal ke pin output untuk nilai tertentu
melalui alamat port D0–D7. Xchg ax,dx merupakan penerimaan sinyal dari input
port. Out dx, al merupakan perintah untuk mengirim sinyal yang diterima dan
mengaktifkan pin output yang diinginkan.
Motor Stepper
Berikut ini juga di sertakan kondisi saat motor 1 aktif. Dengan indikator jika
Portout($379,$No_port)=true, maka indikator led akan berjalan bersamaan motor
stepper dan jika tidak maka kondisi off. Nomor pin yang digunakan pada motor
stepper ini adalah pin 2-5 DB-25.
Pada tform5.bitbtn5click erupaka procedure untuk menggerakkan motor
stepper dimana pada program diatas menggunakan portout($378,$01). Untuk $378
merupakan pengalamatan terhadap data output pada port parallel (d0-d7) dan
$01,$02,$04, dan $08 adalah pengiriman data pada tiap kaki pada motor stepper
untuk bergerak, karena motor stepper bergerak per step sampai putarannya 360

67
derajat. For i digunakan untuk perputaran motor stepper berulang sesuai dengan yang
diinginkan.
d). Opereasi Kerja Alat
Pada operasi kerja alat ini merupakan inti dari kegiatan sensor dan motor
stepper pada alat. Penampilan dari menu entry akan di tampilkan pada menu ini.
Keputusan tentang data input dan data output yang dikerjakan oleh sensor dan motor
stepper akan dikondisikan pada potongan program dibawah ini, hingga pengiriman ke
database untuk memperoleh informasi.
Pada syntax program adalah ketika sensor pada counter aktif, maka kode yang
diterima program dari pin 10 adalah 168. Proses yang masuk pada program akan di
kondisikan sebagai penjumlahan pada counter. Sehingga mengakibatkan counter
bertambah satu. Pada Perulangan diatas terdapat repeat dan until, dimana proses
tersebut akan terjadi proses perulangan dimana antara motor satu dengan dua akan
saling berulang artinya procedure TOpeasiAlat.BitBtn10Click merupakan proses
yang terjadi pada alat. Pada saat button aktif ditekan yaitu pada bitbtn10 diklik maka
pertama sekali motor satu yang akan aktif kemudian dengan menggunakan
delay(100) adalah delay waktu tunggu antara motor satu aktif dengan motor dua aktif.
Jadi antara motor satu dengan motor dua akan saling bergerak aktif dan tidak aktif.
Sebagai contoh jika motor satu sudah berjalan maka motor satu ini akan
diinstruksikan untuk berhenti dan kemudian giliran motor dua yang akan bergerak,
begitu seterusnya yang akan terjadi pada procedure Toperasi alat.bitbtn10clik ini.
e). Laporan Data Base

68
Pada laporan data base ini merupakan format akhir dari semua kegiatan dari
pendeteksian yang dilakukan oleh drying grinding system ini. Tujuan dari pembuatan
database ini adalah untuk pembuatan laporan.
Pada program diatas merupakan program untuk menyimpan ke database
borland delphi yaitu menggunakan statement laporan.Table1.Append. Tabel1.Append
merupakan statement untuk membuka table1 yang telah dibuat.
3.8 Pengoperasian Alat
Untuk mengoperasikan alat ini diperlukan perhatian semua bentuk kalibrasi
yang telah ditentukan. Untuk itu ada langkah-langkah yang perlu diperhatikan
terlebih dahulu dan dilakukan agar proses berjalan dengan baik :
1. Sebelum alat dijalankan pastikan bahwa driver rangkaian sudah terpasang pada
tempatnya masing-masing dan tata letak sensor serta catu daya telah terhubung ke
semua rangkaian.
2. Sebelum kondisi peralatan terpasang pada komputer, pastikan bahwa komputer
dalam keadaan OFF.
3. Setelah semuanya telah siap dipasang, kemudian hubungkan DB-25 male pada
rangkaian ke port parallel.
4. Kemudian Aktifkan komputer (komputer dalam posisi on).
5. Aktifkan Program Borland Delphi 6.0 dan jalankan programnya serta jalankan
instruksi yang ada pada menu.

69
BAB IV
KESIMPULAN DAN SARAN
Berpedoman kepada analisa dan hasil selama dalam proses perancangan dan
pembuatan alat serta sumber-sumber yang dijadikan sebagai pedoman dalam
perancangan dan pembuatan alat ini, maka dapat diambil beberapa kesimpulan yang
berhubungan dengan simulasi drying grinding system.
4.1 Kesimpulan
Berdasarkan analisa kerja alat, yang berfungsi dalam proses simulasi drying
grinding system pada biji kopi, yang telah di buktikan sesuai dengan kemampuannya,
maka system kerja alat ini dapat ditarik kesimpulan sebagai berikut :
1. Komputer dapat digunakan sebagai pengendali dalam hal ini adalah pengendalian
motor stepper yang berfungsi dalam menggerakkan Belt Conveyor, pengendalian
motor dc yang berfungsi dalam membuka dan menutup katup pada media
pencurahan biji kopi, pengendalian motor dc yang berfungsi dalam
menggerakkan simulasi mekanik penggilingan biji kopi, dan penerimaan data
input dari sensor.
2. Simulasi drying grinding system ini ditentukan dengan cara mekanisme dalam
penggilingan biji kopi.
3. Dengan proses drying grinding system ini, dapat mengurangi proses yang bersifat
manual, dimana proses secara manual membutuhkan waktu yang cukup panjang,

70
tenaga yang dikeluarkan cukup banyak, efisiensi dari segi biaya, waktu, dan
tenaga, serta kualitas produk yang dihasilkan.
4. Dapat menentukan jumlah yang akan dihasilkan melalui perhitungan jumlah
kotak yang telah diumpankan ke tempat penggilingan biji kopi berdasarkan
procedure delay pada modul program.
5. Dengan menggunakan personal komputer didapat beberapa keuntungan pada
Tugas akhir ini diantarannya yaitu :
a) Kemudahan dalam pengoperasian
b) Tidak banyak membutuhkan perangkat tambahan karena pada pc telah
dilengkapi dengan program counter sendiri.
c) Tidak membutuhkan banyak tenaga manusia dalam pengoperasiannya.
d) Dapat meningkatkan produktifitas kopi yang dihasilkan.
e) Efisiensi dalam penggunaan waktu pengerjaan pengolahan produksi kopi.
4.2 Keterbatasan Kemampuan Sistem
Dari hasil pengujian dan analisa serta faktor keterbatasan pengetahuan maka
dapat dijelaskan beberapa keterbatasan sistem yaitu :
1. Proses penggilingan biji kopi terutama dalam hal penggilingan belum memenuhi
tujuan yang diharapkan, karena proses penggilingan pada alat skripsi ini hanya
simulasi penggilingan biji kopi yang dilakukan oleh motor dc 12 v.
2. Belum akuratnya perhitungan jumlah produksi yang dihasilkan setelah biji kopi
tersebut diolah.

71
3. Pengaktifan sistem masih memerlukan operator dan apabila biji kopi yang akan di
olah tidak ada maka sistem dihentikan juga melalui operator.
4. Rangkaian yang dipakai dan komponen yang digunakan masih bersifat sederhana
sehingga kinerja sistem masih belum maksimal.
4.3 Saran-saran
Berdasarkan pengalaman yang diperoleh selama perancangan dan pembuatan
alat ini, ada beberapa kendala yang dihadapi dan disini akan disampaikan beberapa
saran yang bermanfaat untuk mengembangkan dan menyempurnakan hasil karya
berikutnya :
1. Perkembangan teknologi cenderung ke arah perkembangan sistem kontrol dengan
tujuan mempermudah pekerjaan, meningkatkan efisiensi kerja, meningkatkan
kualitas serta kuantitas produksi dan penampilan peralatan agar terlihat dengan
efektif dan efisien, maka perancangan alat harus dengan sebaik mungkin dan
seindah mungkin dalam penampilanya.
2. Selama sistem ini beroperasi diharapkan bahwa tidak ada benda-benda selain
yang dibutuhkan melewati sensor.
3. Dalam pembuatan jalur rangkaian dengan PCB harus dilakukan dengan cermat
dan hati-hati, karena apabila terjadi kesalahan dalam pembuatan jalur maka
proses input/ouput dari komputer ke peralatan lain tidak dapat dilaksanakan.
4. Untuk mendapatkan ketelitian yang tinggi, sebaiknya digunakan sensor yang
mempunyai kualitas dan respon yang tinggi.

DAFTAR PUSTAKA
SETIAWAN, Rancang Bangun Kontroler pemutar dan Pengubah Meja Benda Uji
Pada Radiografi Neutron, Sekolah Tinggi Teknologi Mutu Muhammadiyah-
Tangerang, 2005
MICROCHIP TECHNOLOGY INC, PIC16F84 Technical Reference, 1994
ARIANTO WIDYATMO dkk, Belajar Mikroprosesor-Mikrokontroler melaui
komputer PC, Penerbit PT Elex Media Komputindo, Jakarta 1994.
EDDY SANTOSO dkk, Aplikasi Mikrokontroler PIC16F84 Pada Otomatisasi
Sistem Vakumm Tabung Pemandu Neutron, Prosiding Seminar Nasional Hamburan
Neutron dan Sinar X ke 4, Serpong, 6 Juni 2001
MPASM, Assembler User’s Gude, Microchips Technology Inc.1996.
JAMSIHIDI, M. “Fuzzy Logic and Control”, New Jersey: Prentice-Hall, 1993.
MALVINO, ALBERT PAUL. “Electronics Principles”, New York: Mc Graw-Hill,
1984.
OGATA, KATSUHIKO. “Modern Control Engineering”, New Delhi: Prentice-Hall
of India Private Ltd., 1991.
MURAKAMI, S. AND MAEDA, M. “Automobile speed control system using a
fuzzy logic controller”, Amsterdam: North-Holland, 1985.
THIANG, HANAWATI, A., AND RESMANA. “Petrafuz : Sistem Pengembangan
Kendali Fuzzy Logic berbasis Mikrokontroler Keluarga MCS51”, Prosiding Seminar
Nasional Penerapan Teknologi Kendali dan Instrumentasi pada Pertanian, BPPT-
Jakarta. Oktober, 1998
EKO PUTRA, AGFIANTO, Belajar MikrokontrolerAT89C51/52/55, Gava Media,
Yogyakarta, 2003

ABSTRAKSI
Komputer terutama yang tergolong mikro seperti komputer PC selain
digunakan untuk pengolah kata, mengolah data dalam bentuk lembar kerja
(spreadsheet), dan database pada skala lokal sekarang ini banyak diaplikasikan untuk
komunikasi data dimana tukar menukar data tersebut terjadi antar komputer sehingga
membentuk jaringan dalam ruang yang sama, antar gedung, kota, bahkan antar negara
sehingga terbentuk persambungan atau interkoneksi antar jaringan komputer yang
disebut Interconnention Network (Internet). Khusus pada aspek perangkat lunak
terjadi kemajuan seperti adanya program-program yang berorientasi objek dan
berbasis pengetahuan (knowledge based) dimana kedua unsur ini mendukung
terjadinya perkembangan intelejensia semu (artificial intelligence) sebagai contoh
sistem kepakaran (expert system). Berdasarkan kemampuan yang ada, salah satu
bidang untuk mengoptimalkan penggunaan komputer adalah sebagai basis sistem
kontrol untuk obyek atau peralatan luar. Setiap komputer pada dasarnya telah
dilengkapi rangkaian elektronika yang berfungsi sebagai perantara dengan peralatan-
peralatan luar yang standard (input output modul) seperti printer, monitor, keyboard,
dan drive. Untuk menghubungkannya dengan printer interfacenya bersifat fleksibel,
artinya dapat digunakan untuk berbagai aplikasi atau untuk memperantarai tidak
hanya dengan peralatan input-output standar tetapi juga dengan peralatan lain yang
dirancang untuk tujuan khusus. Salah satu peralatan aplikatif yang seringkali dalam
pengoperasiannya masih dilakukan secara manual adalah Dyring Grinding System
untuk biji kopi. Siklus proses yang terjadi selama penggilingan biji kopi, mengalami
kendala dalam mengkontrol kesesuaian antara jumlah biji kopi yang diinputkan
dengan setelah digiling dan keterlibatan banyak tenaga kerja yang juga berakibat
terhadap rendahnya faktor higienis.