Embed Size (px)
Citation preview
1 © 2013 The MathWorks, Inc.
今から始めるSimulink®入門 ~制御編~
MathWorks Japan
アプリケーションエンジニアリング部
アプリケーションエンジニア
張 莉
2
What is Simulink?
3
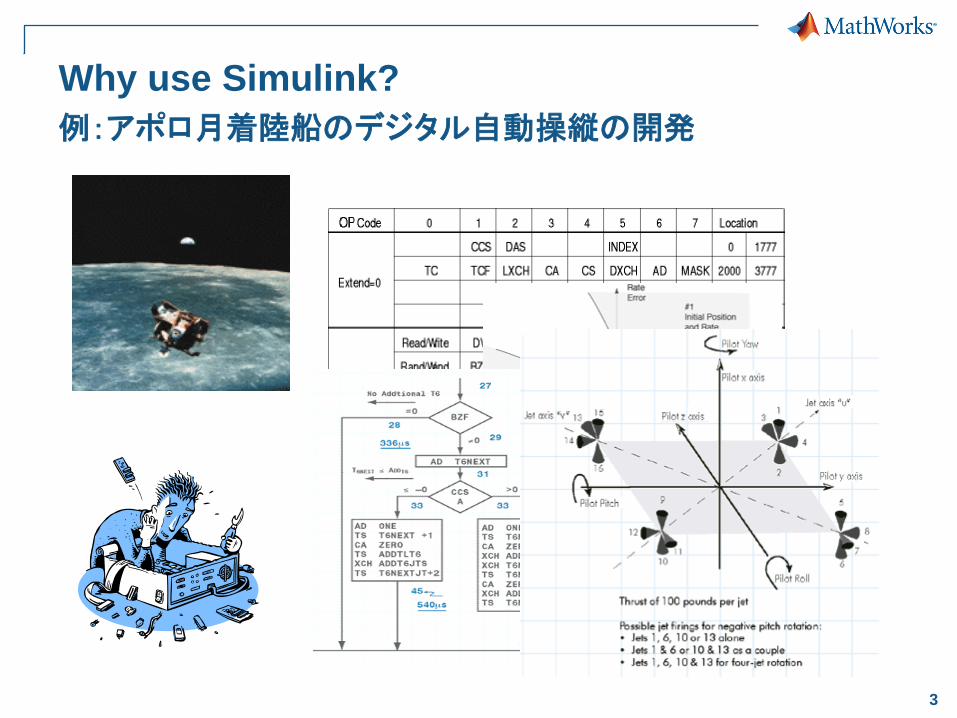
例:アポロ月着陸船のデジタル自動操縦の開発
Why use Simulink?
4
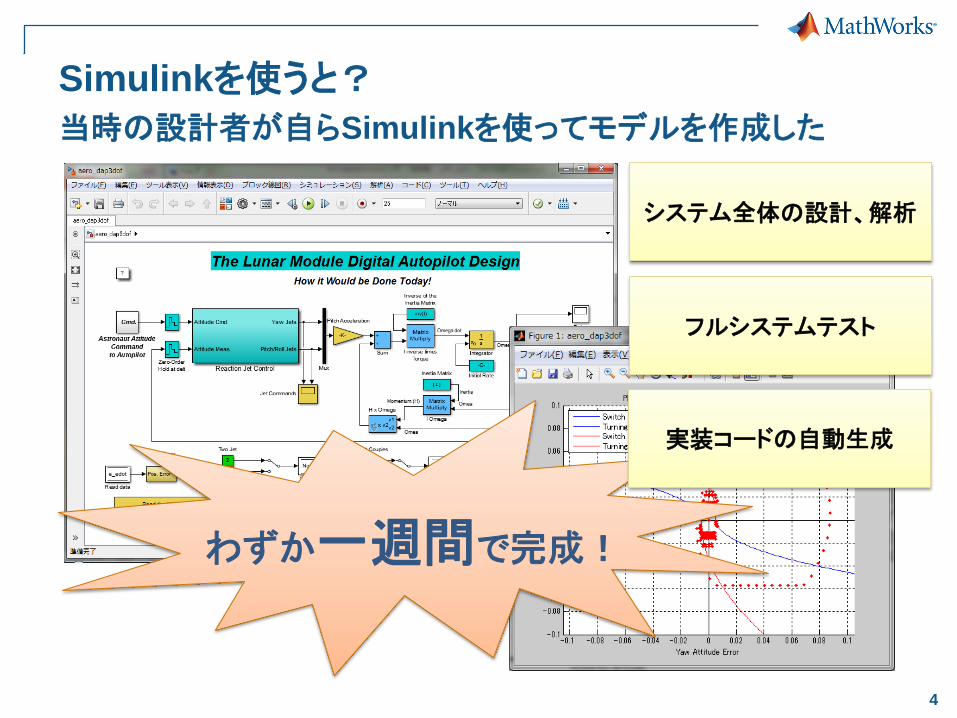
Simulinkを使うと?
当時の設計者が自らSimulinkを使ってモデルを作成した
わずか一週間で完成!
システム全体の設計、解析
フルシステムテスト
実装コードの自動生成
5
例:アポロ月着陸船のデジタル自動操縦の開発
Why use Simulink?
Why NOT use Simulink ?
YET
6
本講演の目的:
これから制御分野でSimulinkを使ってみたい
という初心者の方を対象に、Simulinkの
基本的な使用方法をデモを交えて紹介します。
7
アジェンダ
Simulinkの概要
Simulinkモデルを使ってみましょう
Simulinkモデルを作ってみましょう
まとめ
8
Simulinkを簡単に言うと?
1. Simulinkは、時間とイベントのシミュレーション環境
2. Simulinkは、グラフィカルなモデリング環境
3. Simulinkは、モデルベースデザインを実現するための環境
シミュレー
ション
モデリング
実機
テスト、
検証
自動コード
生成
モデル シミュレー
ション
モデリング
実機
テスト、
検証
自動コード
生成
モデル
9
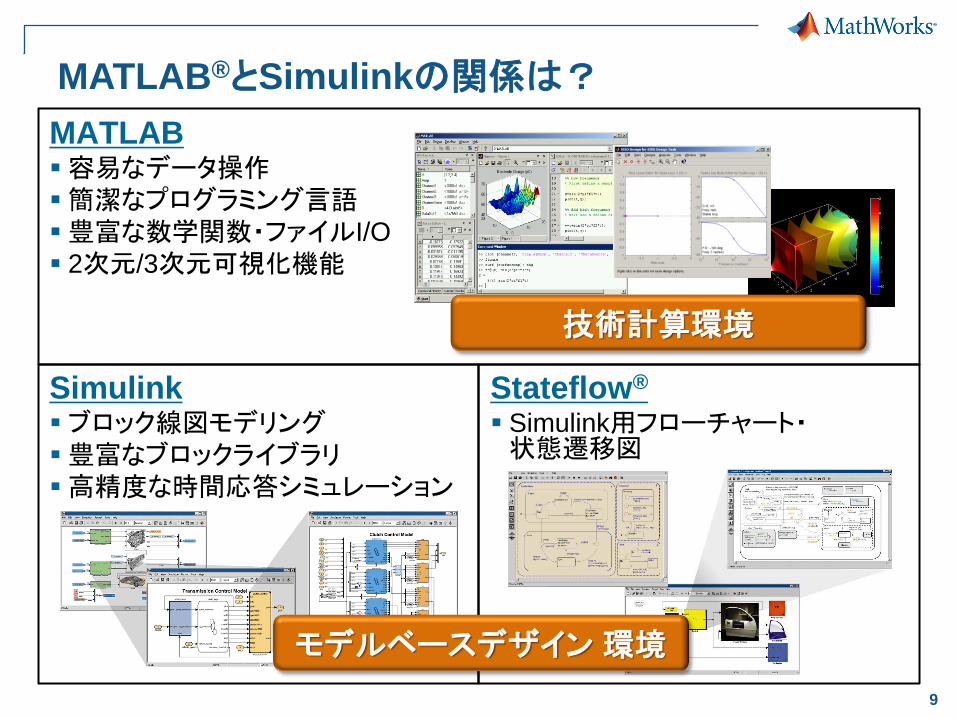
MATLAB®とSimulinkの関係は?
MATLAB 容易なデータ操作
簡潔なプログラミング言語
豊富な数学関数・ファイルI/O
2次元/3次元可視化機能
Simulink ブロック線図モデリング
豊富なブロックライブラリ
高精度な時間応答シミュレーション
Stateflow®
Simulink用フローチャート・ 状態遷移図
技術計算環境
モデルベースデザイン 環境
10
MATLAB/Simulink 採用業種
航空宇宙/防衛
自動車関連
医療、創薬
化学/石油
通信
コンピュータ、オフィス機器
教育
エレクトロニクス/半導体
金融関連
工業オートメーション
計測
電気、ガス、エネルギー

11
MATLAB/Simulink 適用分野
金融解析
実験・計測
通信/エレクトロニクス/半導体
画像処理
科学技術計算
生命工学
制御関連
12
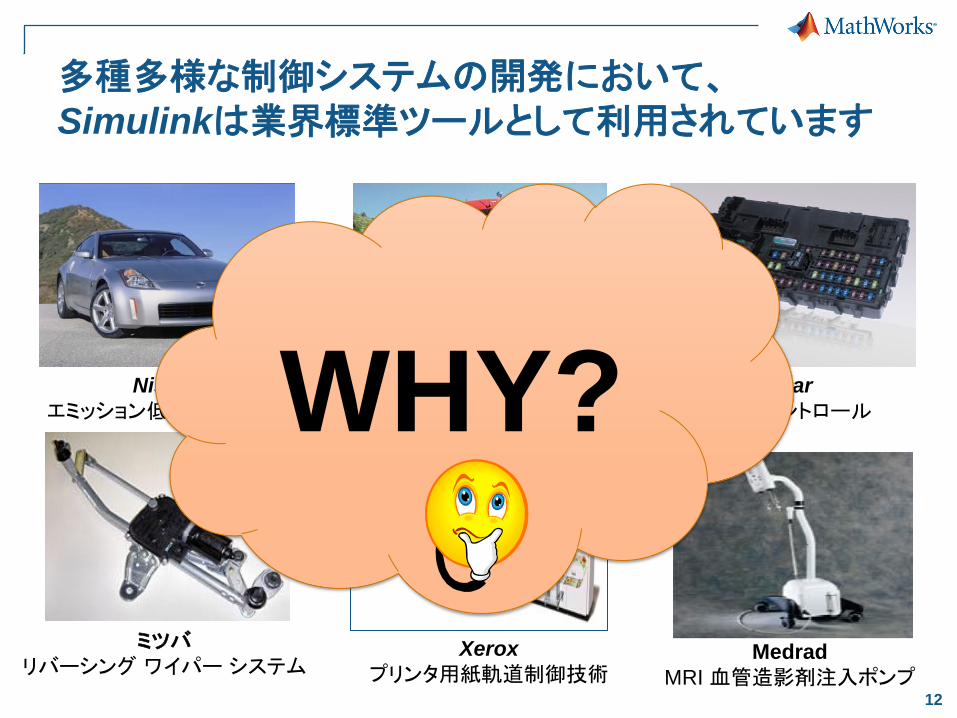
多種多様な制御システムの開発において、
Simulinkは業界標準ツールとして利用されています
ミツバ
リバーシング ワイパー システム Xerox
プリンタ用紙軌道制御技術
Lear
ボディコントロール
Nissan
エミッション低減化システム Daimler Truck
クルーズコントローラー
Medrad
MRI 血管造影剤注入ポンプ
WHY?
13
Simulinkを使用し、
制御システムの振る舞いを机上で簡単に検討!
14
アジェンダ
Simulinkの概要
Simulinkモデルを使ってみましょう
Simulinkモデルを作ってみましょう
まとめ
15
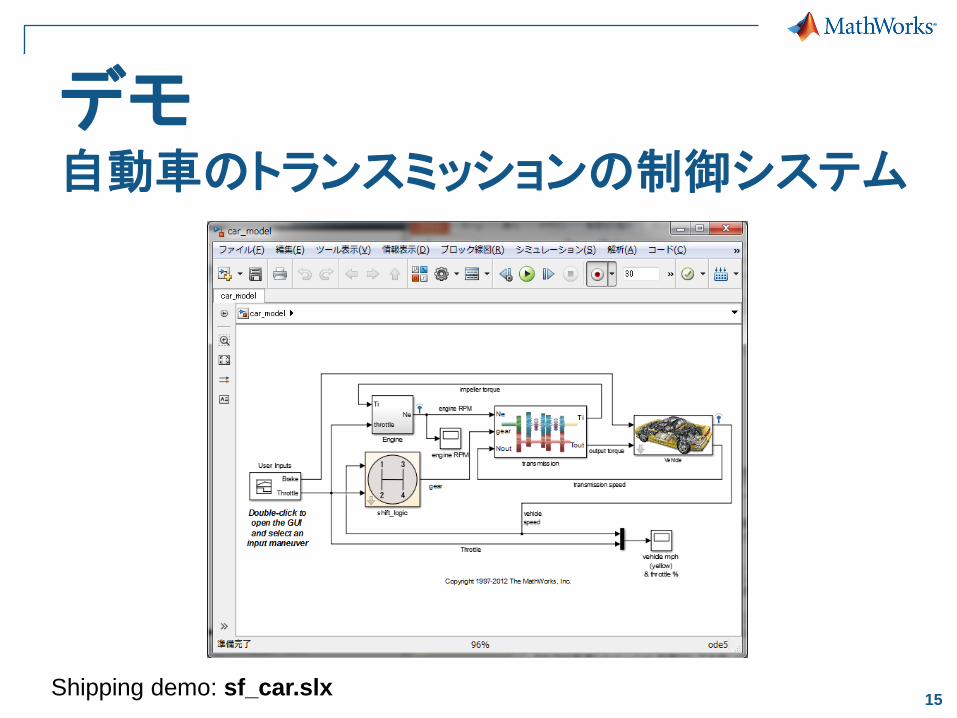
デモ 自動車のトランスミッションの制御システム
Shipping demo: sf_car.slx
16
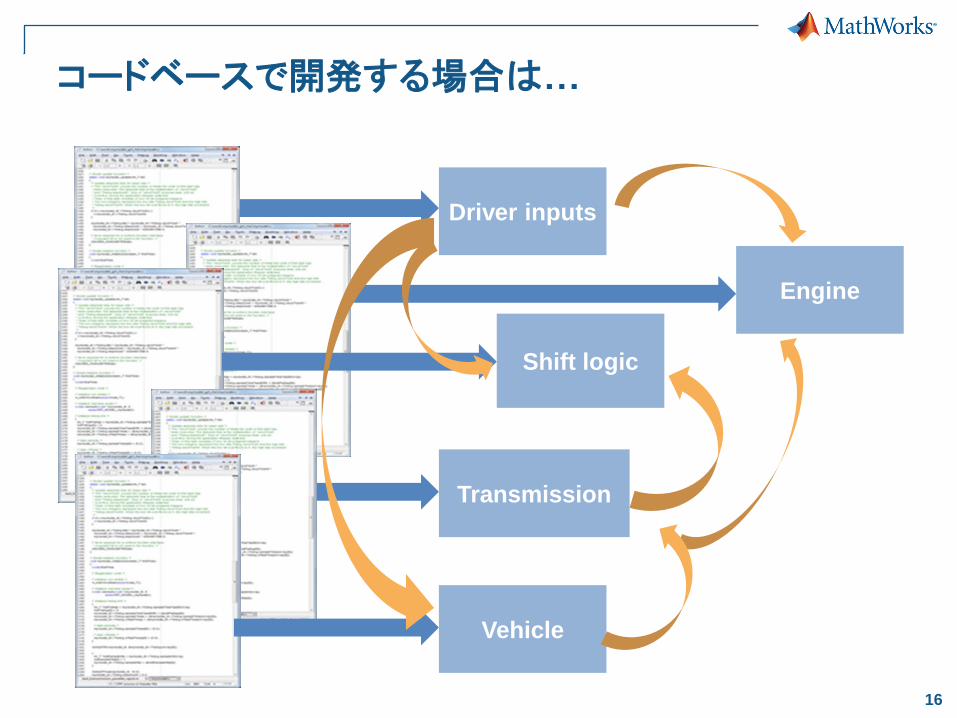
コードベースで開発する場合は…
Engine
Shift logic
Transmission
Driver inputs
Vehicle
17
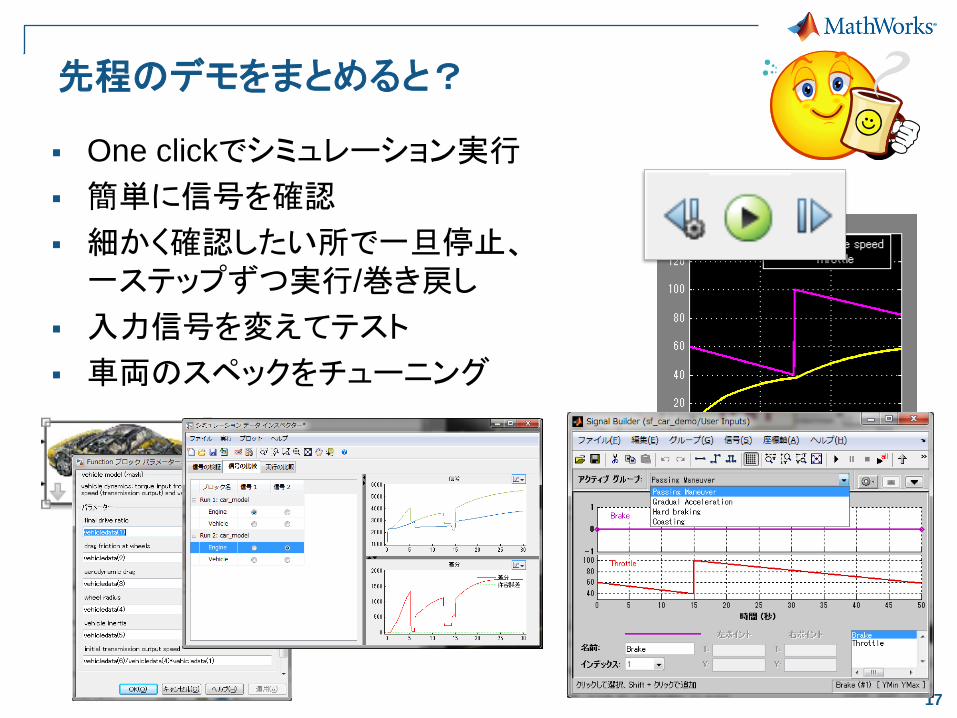
先程のデモをまとめると?
One clickでシミュレーション実行
簡単に信号を確認
細かく確認したい所で一旦停止、
一ステップずつ実行/巻き戻し
入力信号を変えてテスト
車両のスペックをチューニング
18
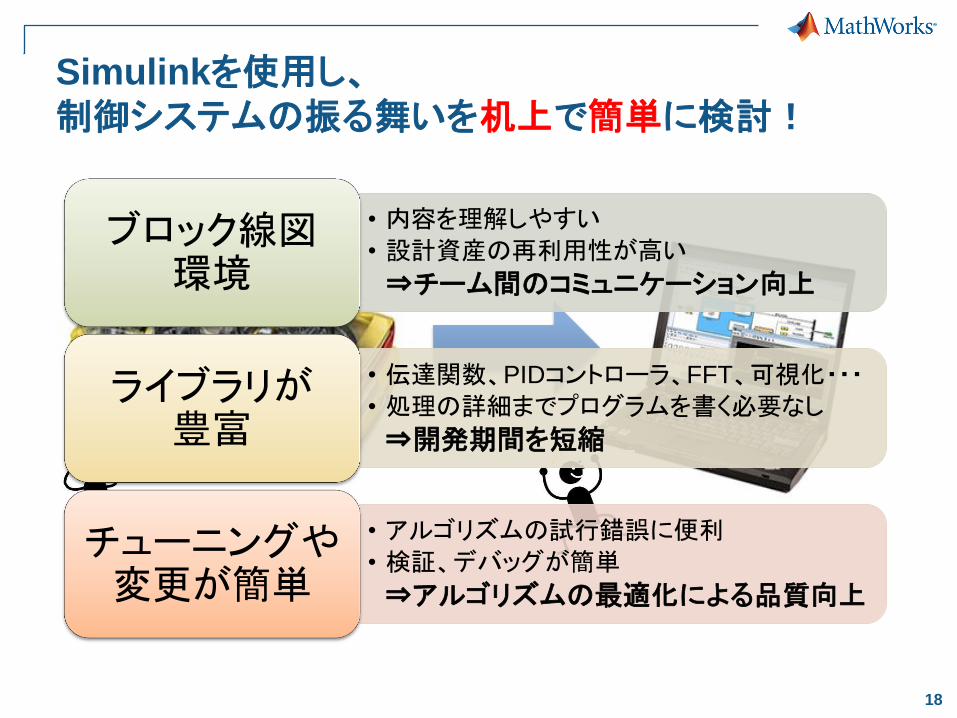
Simulinkを使用し、
制御システムの振る舞いを机上で簡単に検討!
• 内容を理解しやすい
• 設計資産の再利用性が高い
⇒チーム間のコミュニケーション向上
ブロック線図 環境
• 伝達関数、PIDコントローラ、FFT、可視化・・・
• 処理の詳細までプログラムを書く必要なし
⇒開発期間を短縮
ライブラリが 豊富
• アルゴリズムの試行錯誤に便利
• 検証、デバッグが簡単
⇒アルゴリズムの最適化による品質向上
チューニングや 変更が簡単
19
アジェンダ
Simulinkの概要
Simulinkモデルを使ってみましょう
Simulinkモデルを作ってみましょう
まとめ
20
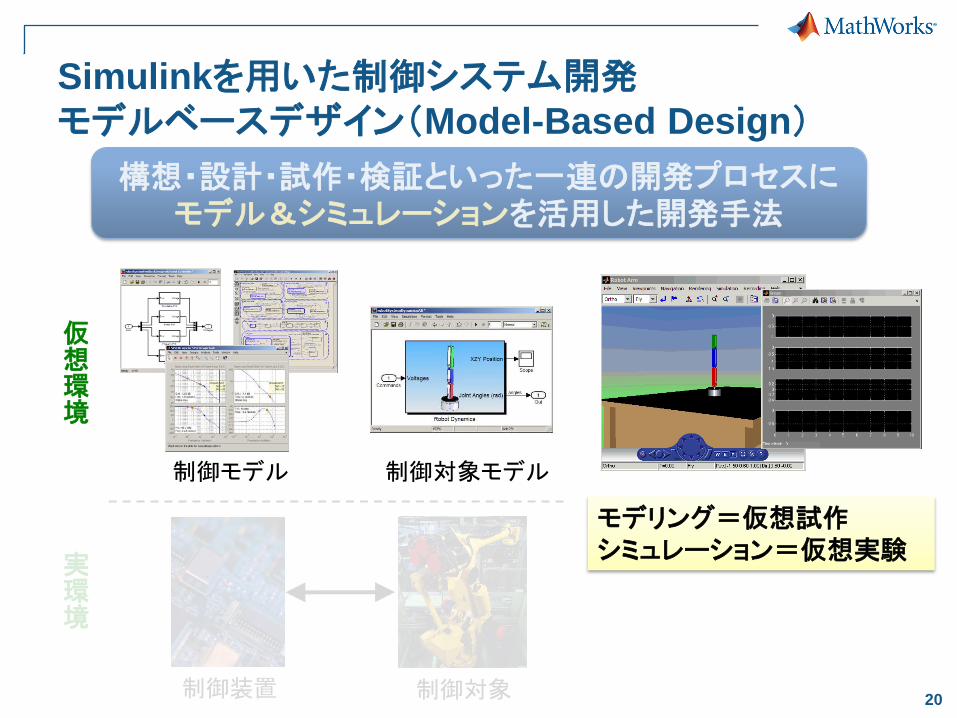
仮想環境
Simulinkを用いた制御システム開発
モデルベースデザイン(Model-Based Design)
構想・設計・試作・検証といった一連の開発プロセスにモデル&シミュレーションを活用した開発手法
制御装置
実環境
制御対象
制御対象モデル 制御モデル
モデリング=仮想試作
シミュレーション=仮想実験
21
シミュレー
ション
モデリング
実機
テスト、
検証
自動コード
生成
モデル
シミュレー
ション
モデリング
実機
テスト、
検証
自動コード
生成
モデル - 設計しながらテスト可能
- 早期のエラー検出
21
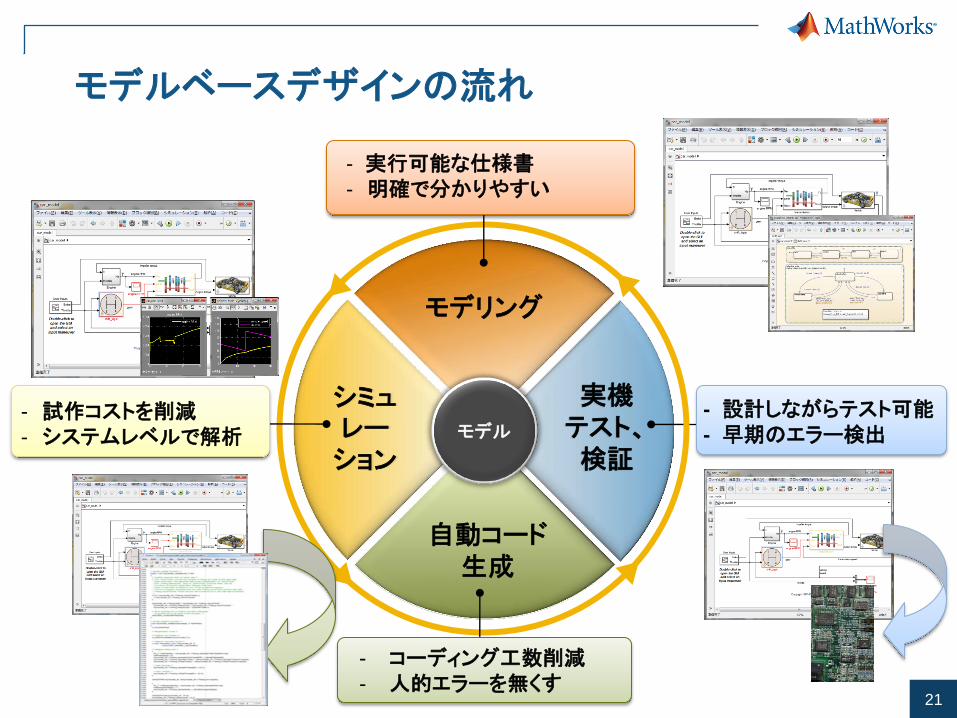
モデルベースデザインの流れ
- 実行可能な仕様書
- 明確で分かりやすい
- 試作コストを削減
- システムレベルで解析
- コーディング工数削減
- 人的エラーを無くす
22
Simulinkを使って、
簡単な制御システムを作ってみましょう!
23
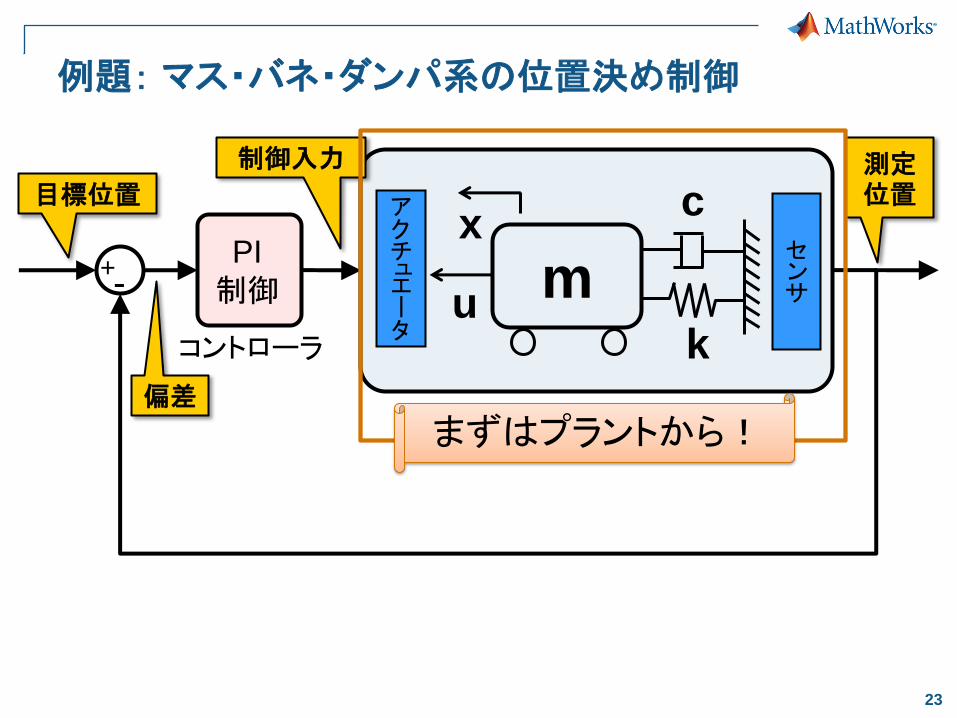
例題: マス・バネ・ダンパ系の位置決め制御
+ -
アクチュエータ
センサ
PI
制御
コントローラ
プラント
目標位置 測定位置
m
c
k
x
u
制御入力
偏差
まずはプラントから!
24
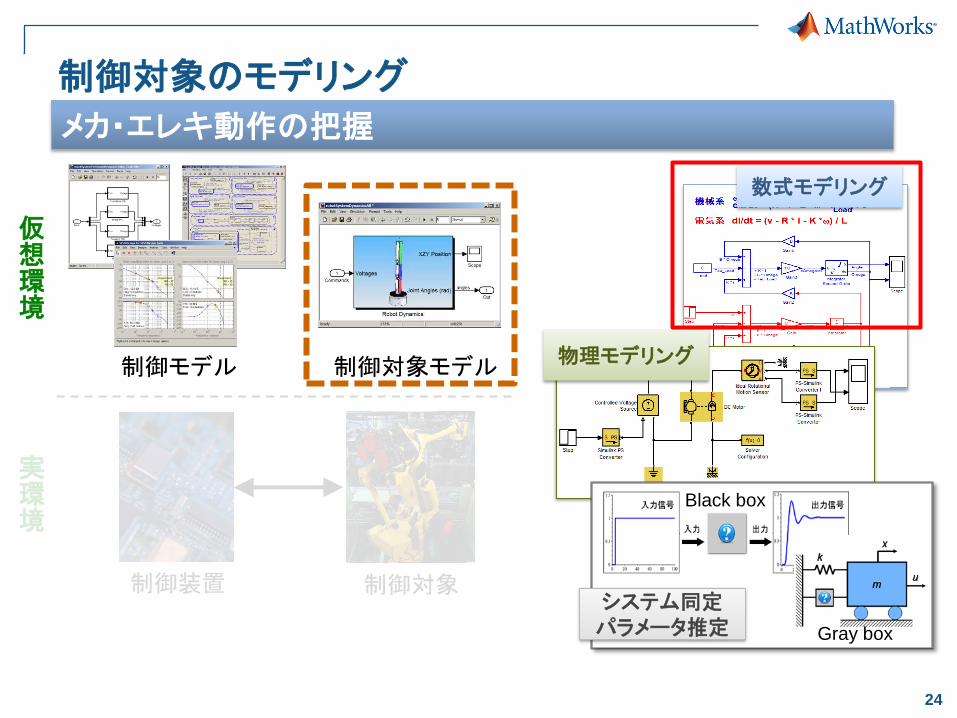
制御対象のモデリング
仮想環境
制御装置
実環境
制御対象
制御対象モデル 制御モデル
メカ・エレキ動作の把握
数式モデリング
物理モデリング
Black box
Gray box
システム同定
パラメータ推定
25
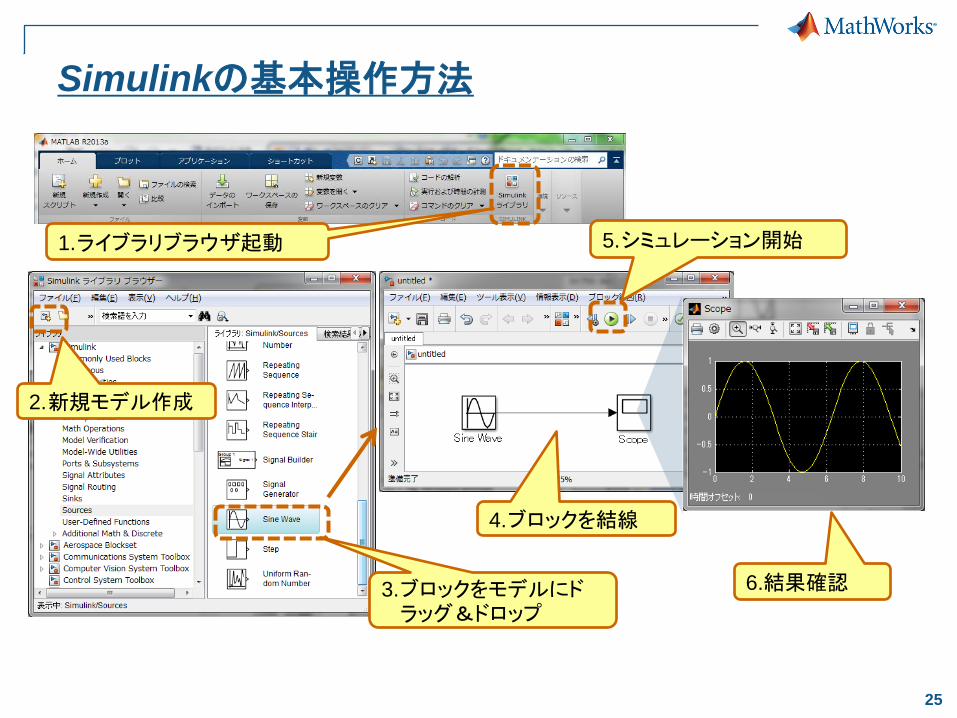
1.ライブラリブラウザ起動
3.ブロックをモデルにドラッグ&ドロップ
2.新規モデル作成
5.シミュレーション開始
4.ブロックを結線
Simulinkの基本操作方法
6.結果確認
26
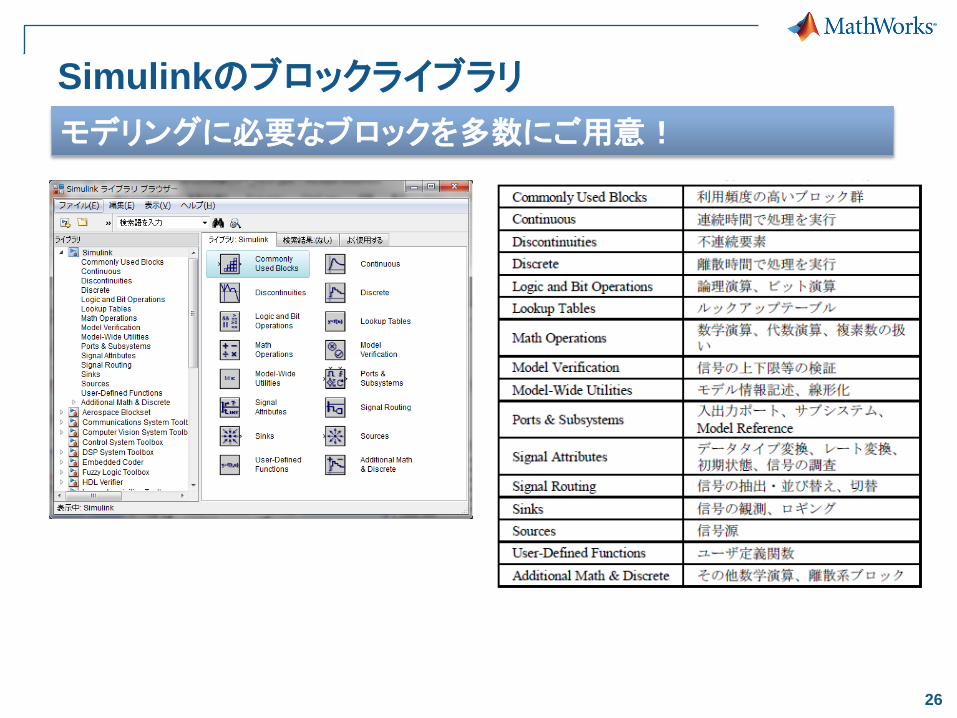
Simulinkのブロックライブラリ
モデリングに必要なブロックを多数にご用意!
27
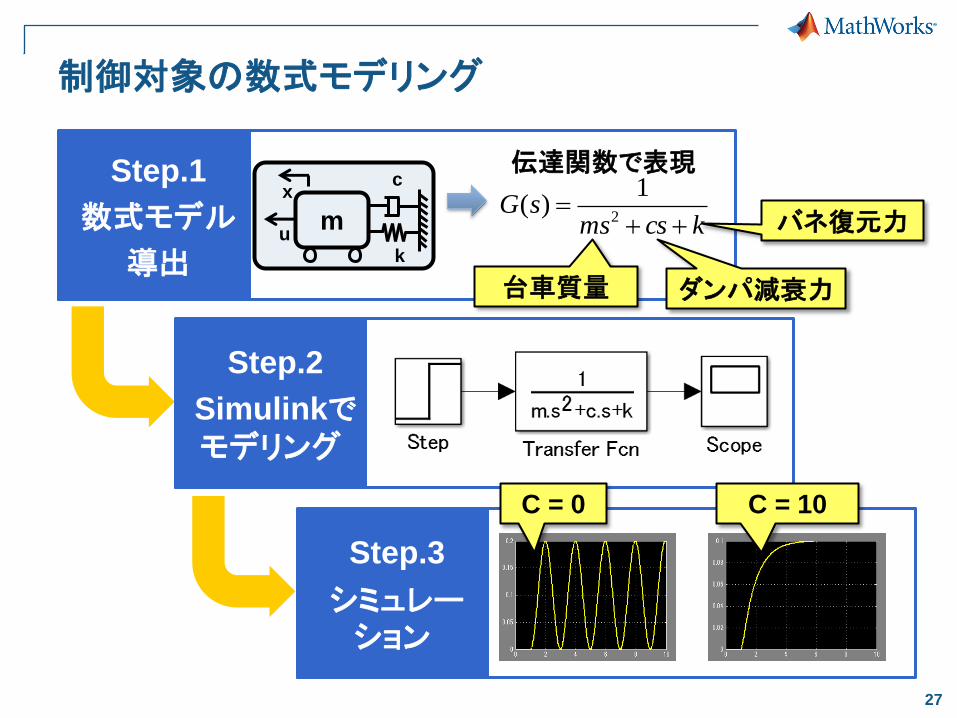
制御対象の数式モデリング
Step.1
数式モデル
導出
m
c
k
x
u kcsmssG
2
1)(
Step.2
Simulinkでモデリング
Step.3
シミュレーション
C = 0 C = 10
バネ復元力
ダンパ減衰力
伝達関数で表現
台車質量
28
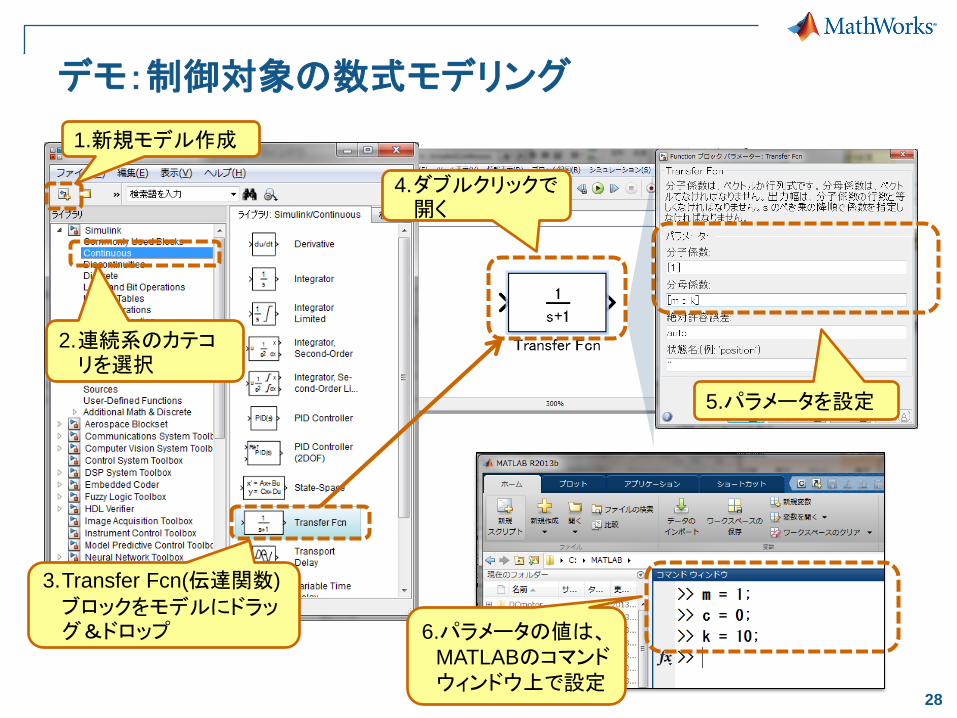
デモ:制御対象の数式モデリング
3.Transfer Fcn(伝達関数)
ブロックをモデルにドラッグ&ドロップ
1.新規モデル作成
4.ダブルクリックで開く
2.連続系のカテコリを選択
5.パラメータを設定
6.パラメータの値は、
MATLABのコマンド
ウィンドウ上で設定
29
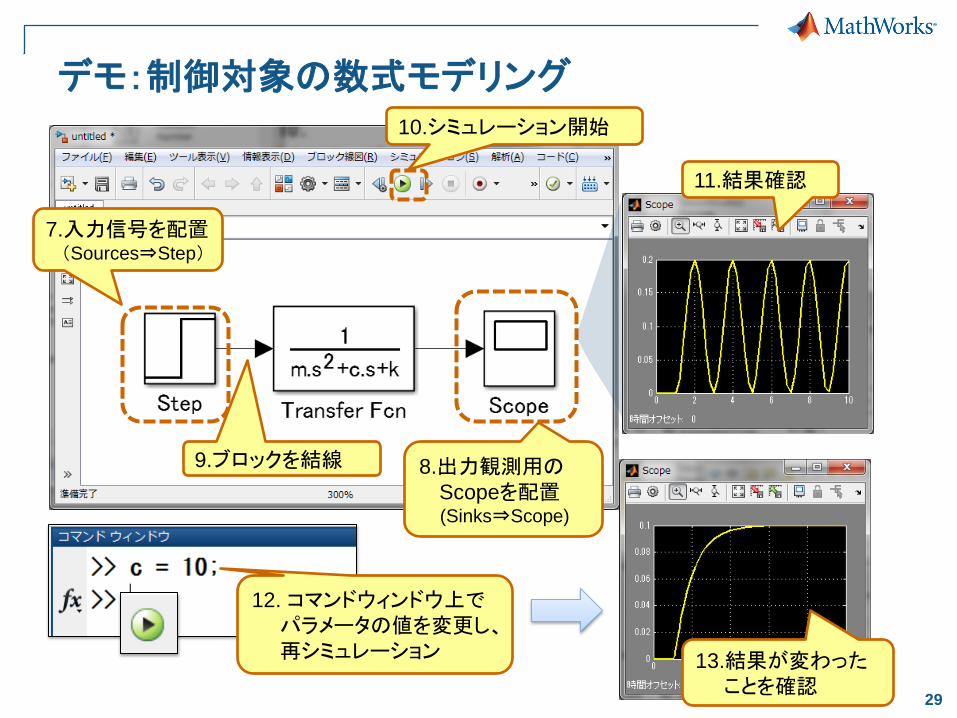
デモ:制御対象の数式モデリング
8.出力観測用の
Scopeを配置 (Sinks⇒Scope)
7.入力信号を配置 (Sources⇒Step)
10.シミュレーション開始
9.ブロックを結線
11.結果確認
12. コマンドウィンドウ上で
パラメータの値を変更し、
再シミュレーション 13.結果が変わった
ことを確認
30
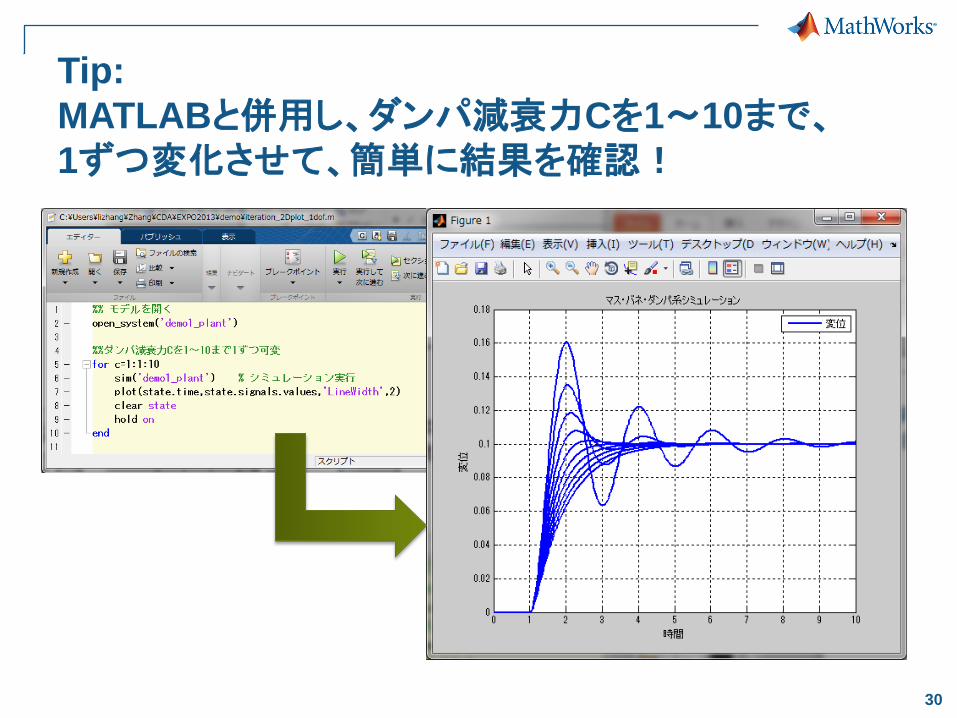
Tip:
MATLABと併用し、ダンパ減衰力Cを1~10まで、
1ずつ変化させて、簡単に結果を確認!
31
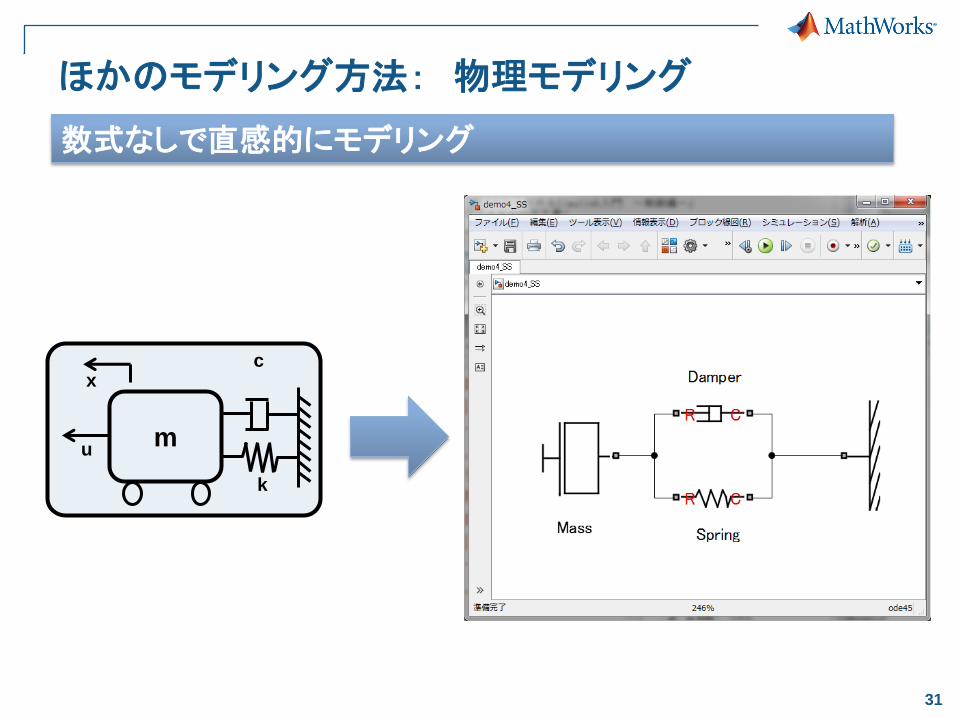
ほかのモデリング方法: 物理モデリング
数式なしで直感的にモデリング
m
c
k
x
u

32
マルチドメインな物理モデリング環境
Sim
Mech
an
ics
TM
Sim
Dri
veli
ne
TM
Sim
Hyd
rau
lics
®
Sim
Ele
ctr
on
ics
®
Sim
Po
werS
yste
ms
TM
SimscapeTM
MATLAB, Simulink
Simscape 機械 油圧 電気
熱
“Simscape Language”
によるカスタム部品/ドメイン開発
空気圧 磁気
N S
マルチドメインシステム専用の計算エンジン
DAE(微分代数方程式)ソルバ
基本要素ブロックライブラリ
カスタムコンポーネント
弱電 デジアナ
動力伝達 1D
油圧 1D
機械 3D
強電 パワエレ
関連講演: A4 Simscapeによる物理モデリング
入門
33
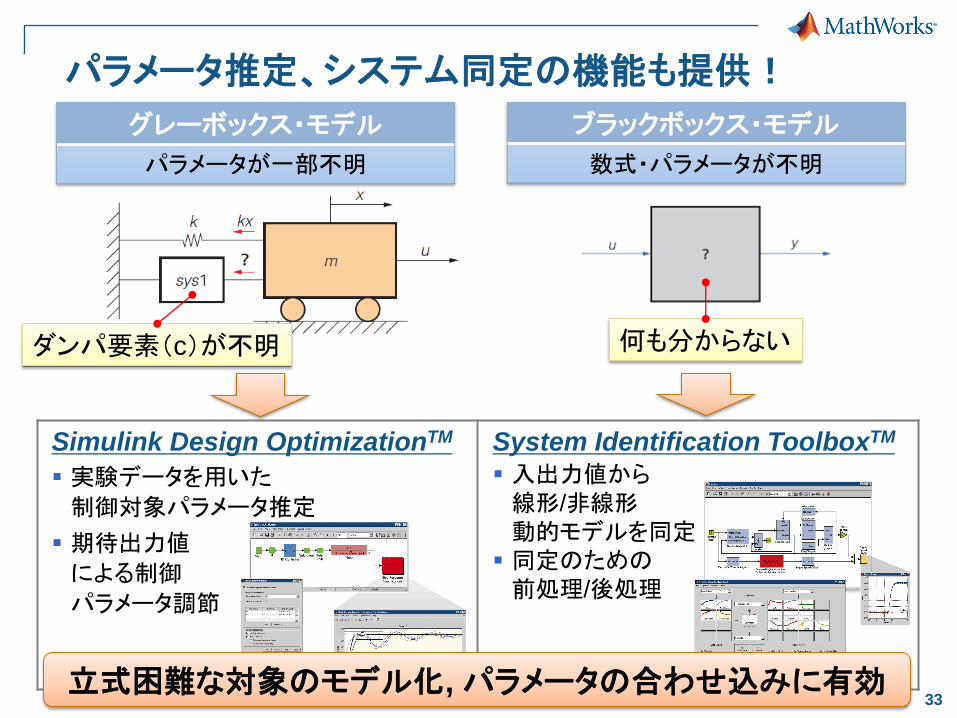
Simulink Design OptimizationTM
実験データを用いた
制御対象パラメータ推定
期待出力値
による制御
パラメータ調節
System Identification ToolboxTM
入出力値から
線形/非線形
動的モデルを同定
同定のための
前処理/後処理
グレーボックス・モデル
パラメータが一部不明
ダンパ要素(c)が不明
ブラックボックス・モデル
数式・パラメータが不明
何も分からない
※ Optimization ToolboxTM が必要
パラメータ推定、システム同定の機能も提供!
立式困難な対象のモデル化, パラメータの合わせ込みに有効
34
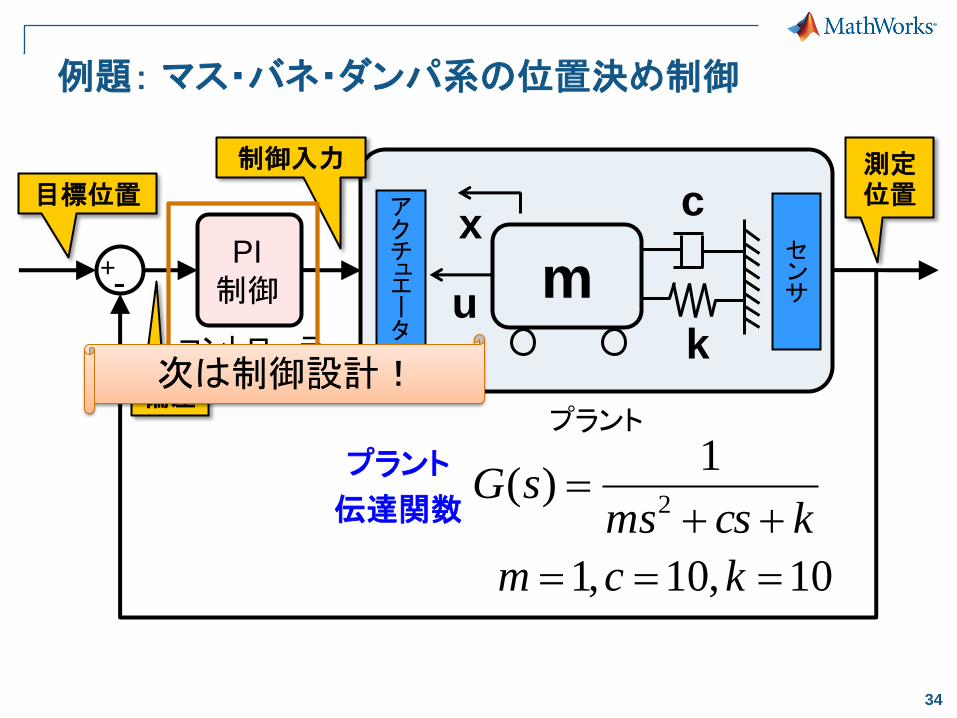
例題: マス・バネ・ダンパ系の位置決め制御
+ -
アクチュエータ
センサ
PI
制御
コントローラ
プラント
目標位置 測定位置
m
c
k
x
u
制御入力
kcsmssG
2
1)(
プラント
伝達関数
10,10,1 kcm
偏差 次は制御設計!
35
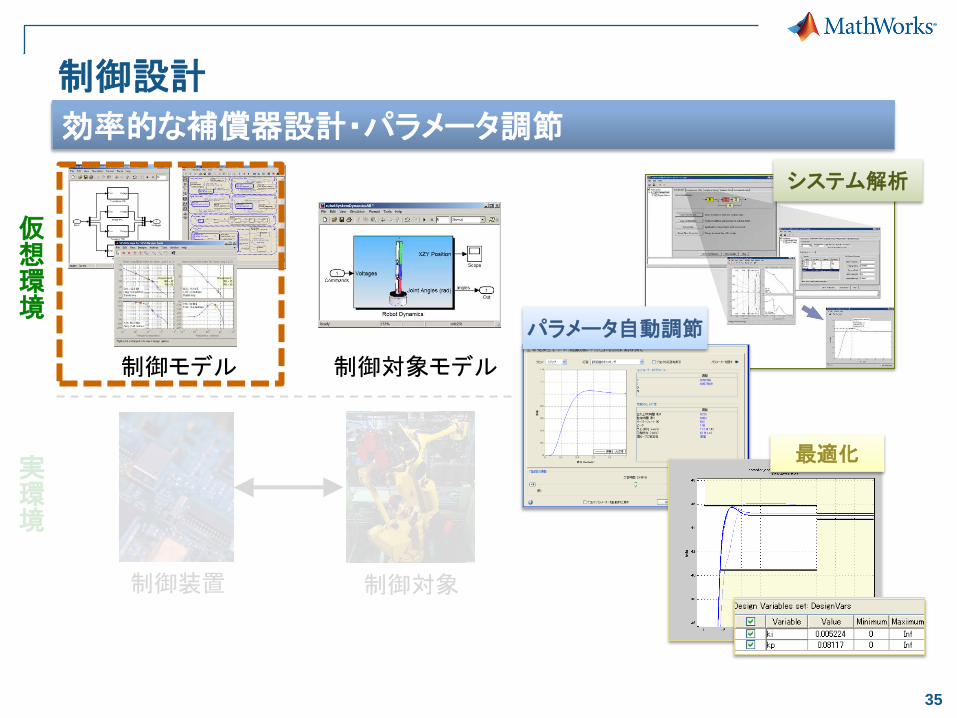
制御設計
仮想環境
制御装置
実環境
制御対象
制御対象モデル 制御モデル
効率的な補償器設計・パラメータ調節
システム解析
パラメータ自動調節
最適化
36
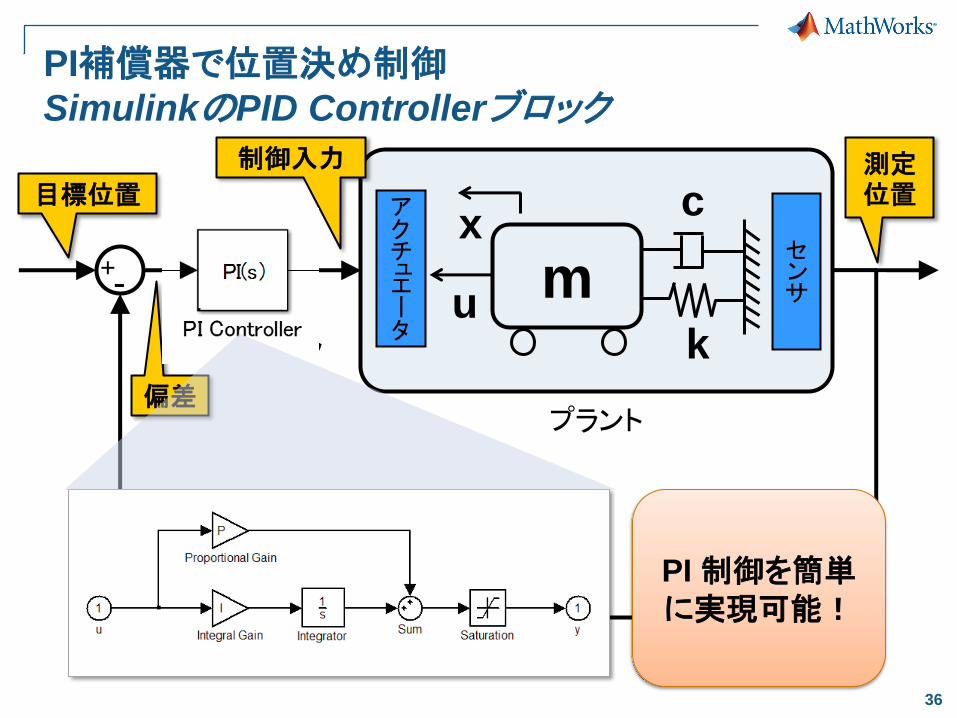
PI補償器で位置決め制御
SimulinkのPID Controllerブロック
+ -
アクチュエータ
センサ
PI
制御
コントローラ
プラント
目標位置 測定位置
m
c
k
x
u
制御入力
偏差
PI 制御を簡単に実現可能!
37
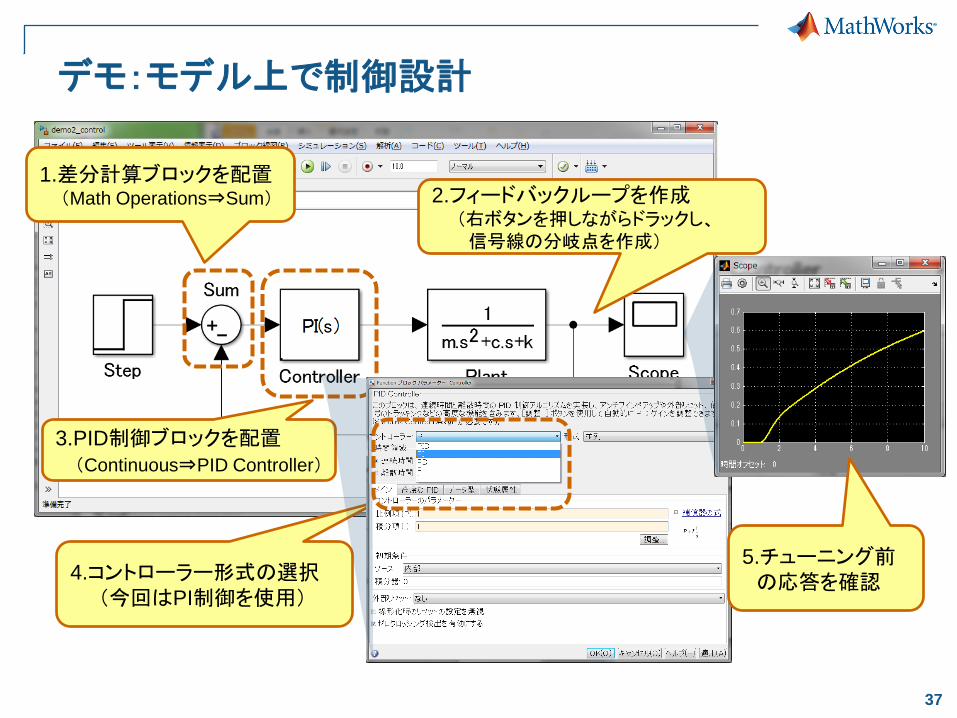
デモ:モデル上で制御設計
4.コントローラー形式の選択
(今回はPI制御を使用)
1.差分計算ブロックを配置 (Math Operations⇒Sum)
3.PID制御ブロックを配置
(Continuous⇒PID Controller)
2.フィードバックループを作成
(右ボタンを押しながらドラックし、
信号線の分岐点を作成)
5.チューニング前
の応答を確認
38
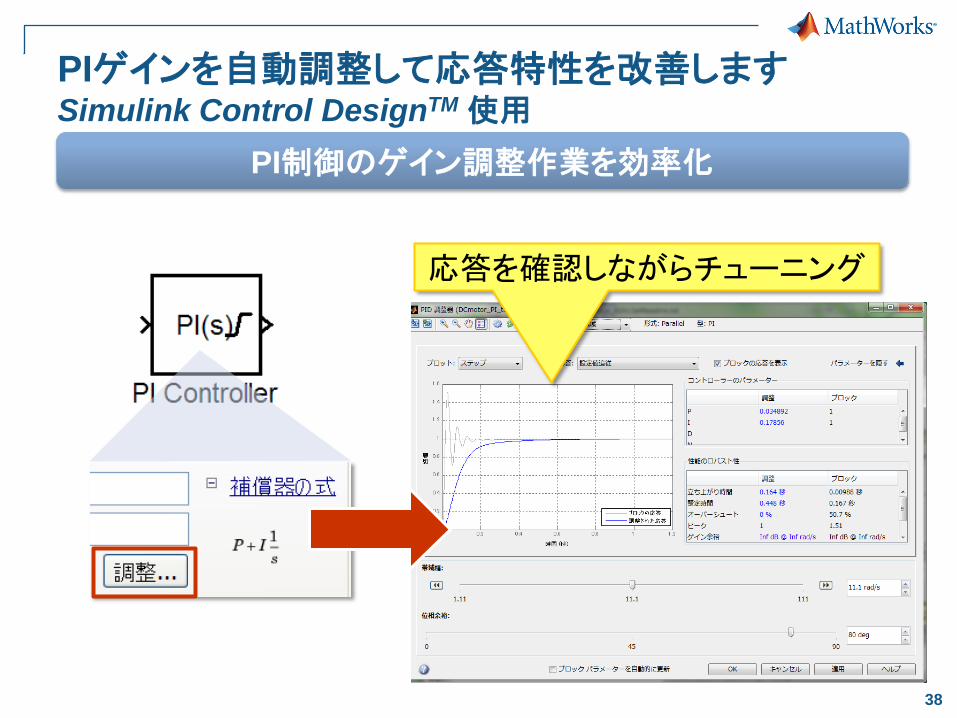
PIゲインを自動調整して応答特性を改善します Simulink Control DesignTM 使用
応答を確認しながらチューニング
PI制御のゲイン調整作業を効率化
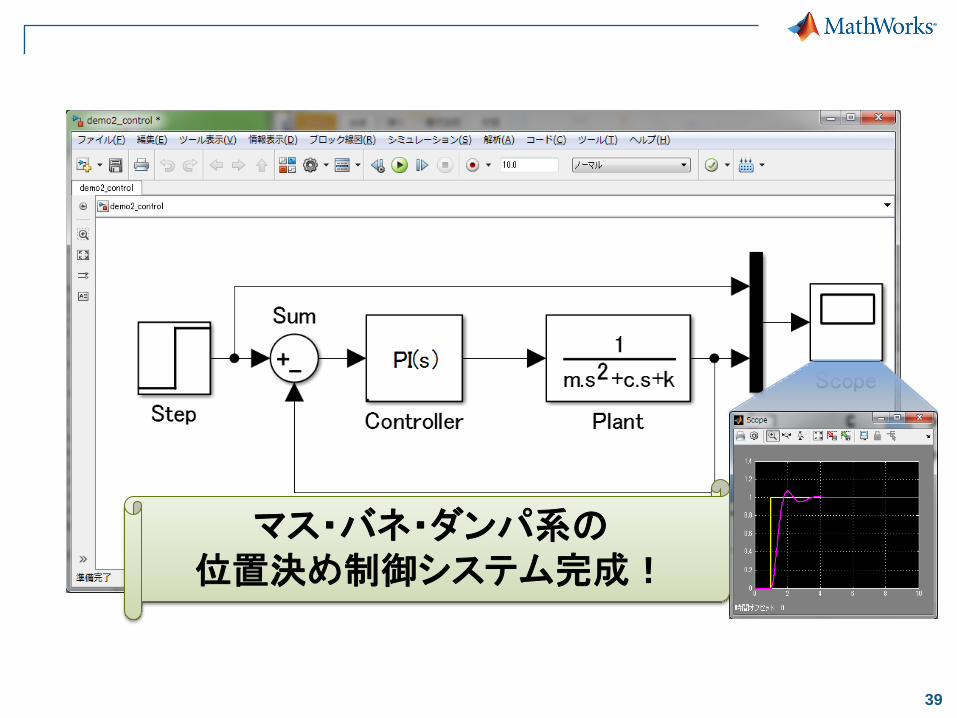
39
マス・バネ・ダンパ系の
位置決め制御システム完成!
40
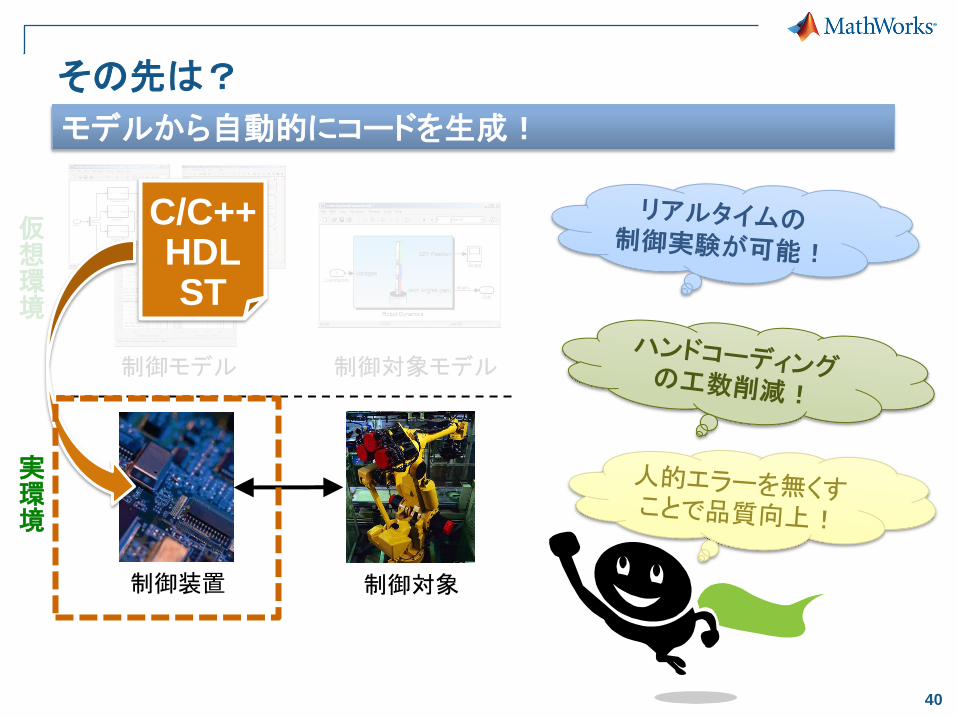
その先は?
仮想環境
制御装置
実環境
制御対象
制御対象モデル 制御モデル
C/C++ HDL ST
モデルから自動的にコードを生成!

41
最初の例題に戻ります
42
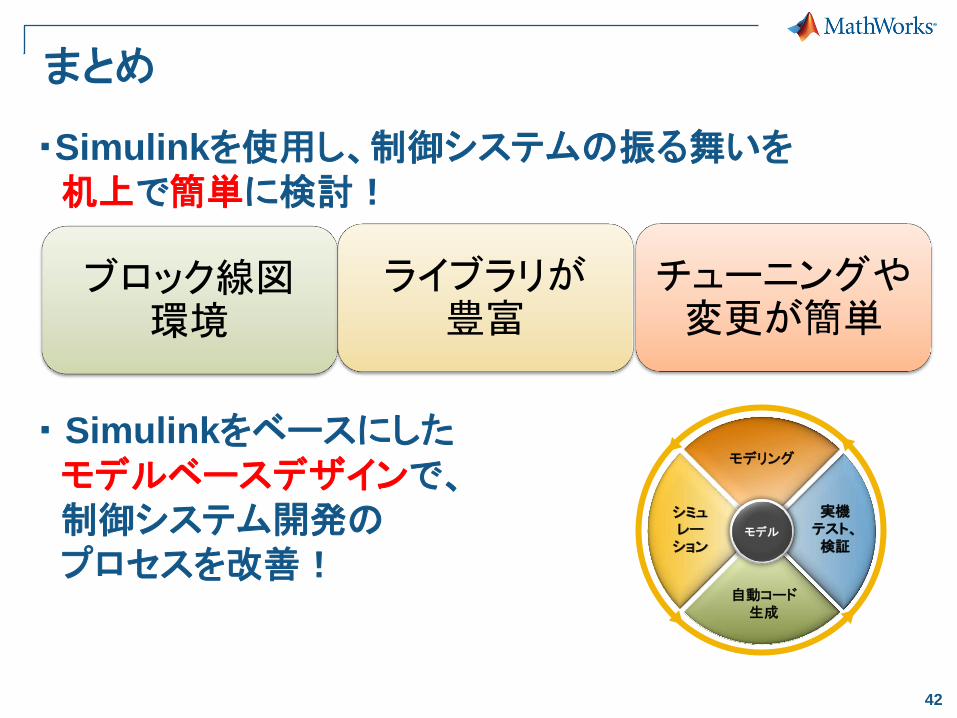
まとめ
ブロック線図 環境
ライブラリが 豊富
チューニングや 変更が簡単
・Simulinkを使用し、制御システムの振る舞いを
机上で簡単に検討!
・ Simulinkをベースにした
モデルベースデザインで、
制御システム開発の
プロセスを改善!
シミュレー
ション
モデリング
実機
テスト、
検証
自動コード
生成
モデル
シミュレー
ション
モデリング
実機
テスト、
検証
自動コード
生成
モデル
43
もう少し深く知りたい方に向けの情報
関連講演 A4 Simscapeによる物理モデリング入門
E2 モーター・モーション制御モデルベースデザイン実践「制御系設計」編
E3 モーター・モーション制御モデルベースデザイン実践「プラントモデリング」編
E4 モーター・モーション制御モデルベースデザイン実践「リアルタイムテスト」編
E5 モーター・モーション制御モデルベースデザイン実践「組み込みコード生成」編
F4 多入出力(MIMO)制御システムのチューニングをSimulinkでより簡単に
44
Simulink を最大限活用するために・・・
【Simulink 基礎】 トレーニング • Simulink をすぐに使いこなせるようになります
• 日数:2日間 in 名古屋/東京
【MATLAB と Simulink による制御設計】 トレーニング • MATLAB/Simulink 製品群による閉ループ制御システムの設計方法(プラントモデリング、解析、コントローラー設計・シミュレーション等)を習得できます。
• 日数:2日間 in 名古屋/東京
Googleにて、” Simulink ” “トレーニング” で検索!!
Great Learning
Experience!
受講者の声: - 講習の内容は座学と実習がちょうどよいバランスで楽しみながら学ぶことができました。 - Simulinkの使い方が基礎から説明されていて、とても良かったです。はじめてSimulinkに触れる人には、おすすめできる内容だと思いました。
- 今回の講義を通して、はじめてMATLABとSimulinkについて触れる機会となりましたが、大変分かりやすい説明と講義資料により、着実に理解しながら進めることができました。
45
ご清聴ありがとうございました.
© 2013 The MathWorks, Inc. MATLAB and Simulink are registered
trademarks of The MathWorks, Inc. See www.mathworks.com/trademarks
for a list of additional trademarks. Other product or brand names may be
trademarks or registered trademarks of their respective holders.









![ACサーボモータ・アンプ - Global home | Industrial … [位置制御モードの接続と設定] ページ 位置制御モード時の制御ブロック図 66 位置制御モード時の制御ブロック図](https://img.pdfslide.tips/doc/110x75/5ac41e8d7f8b9ae06c8cfee2/ac-global-home-industrial-.jpg)

















![[bladeRF + MATLAB/Simulink] SDRデバイス利用の手引き](https://img.pdfslide.tips/doc/110x75/58a574131a28ab36768b51a3/bladerf-matlabsimulink-sdr.jpg)

