Embed Size (px)
Citation preview

SINTEZA LUCRARII
FAZA 1 / 2009
Proiect ID 005/2007, Contract 263/2007
CERCETARI FUNDAMENTALE SI APLICATIVE PENTRU CONTROLUL IN
POZITIE AL ROBOTILOR PASITORI HFPC MERO
ETAPA UNICA 2009:
Obiectivul principal al proiectului consta in elaborarea de noi concepte si noi abordari in
controlul hibrid forta-pozitie al robotilor pasitori modulari cu dezvoltarea si realizarea
experimentala a unui nou sistem multiprocesor, de control in timp real, cu arhitectura deschisa
HFPC MERO.
In etapa curenta s-au realizat cele doua obiective corespunzatoarei fazei 1 pe 2009, care au ca
principal scop dezvoltarea sistemului HFPC de control al robotilor pasitori:
1 Dezvoltarea unor noi capabilitati tehnologice pentru control compliant cu functii de
urmarire al robotilor pasitori modulari HFPC – REALIZAT INTEGRAL
2. Conceperea unei noi metode de control fuzzy ¨multi-stage¨ (MS) pentru robotii pasitori
HFPC MERO – REALIZAT INTEGRAL
Pentru cresterea mobilitatii si stabilitatii in conditii reale si pentru obtinerea unor
performante superioare legate de posibilitatea deplasarii robotilor pasitori pe terenuri cu o
configuratie cat mai aproape de situatiile reale, activitatile din aceasta etapa au condus la
dezvoltarea unor noi capabilitati tehnologice ale sistemului HFPC de control al robotilor
pasitori modulari pentru mersul in panta respectiv pentru depasirea sau ocolirea unor obstacole.
O alta directie, avand acelasi scop, a fost conceperea unei noi metode de control fuzzy ¨multi-
stage¨ prin modelarea cinematica inversa a mecanismului picioarelor, prin modelarea cinematica
directa si inversa a punctelor de sprijin Pi ale picioarelor si modelarea matematica a pozitiei
centrului de greutate al robotului.
In continuare sunt prezentate succint conceptele dezvoltate in aceasta etapa si performantele
rezultate.

2
2
DEZVOLTAREA UNOR NOI CAPABILITATI TEHNOLOGICE
PENTRU CONTROL COMPLIANT CU FUNCTII DE URMARIRE AL ROBOTILOR
PASITORI MODULARI HFPC
S-a dezvoltat o noua metoda de control al traiectoriei de deplasare al robotilor
pasitori, prezentata pe larg intr-o lucrare, acceptata spre publicare intr-o revista cotata ISI, in
care miscarea robotului este controlata numai in spatiul mediului robotului. Dupa prezentarea
conceptelor si fundamentelor teoretice asupra acestei metode de control al robotilor pasitori se
face o analiza a metodei prin particularizare la robotii MERO, cu prezentarea modelului
matematic, a programului de control in timp real si a rezultatelor obtinute prin simulare. S-a
definit metoda de control al functiilor locomotorie la hexapodul cu structura MERO, luand in
considerare doua moduri de pasire, pasirea succesiva si pasirea simetrica tripoda. S-a dezvoltat
modelul geometric direct MGD, care presupune cunoasterea pozitiilor relative ale cuplelor
cinematice si determinarea pozitiei relative a terminatiei piciorului in raport cu robotul. S-a
dezvoltat modelul geometric invers MGI, care presupune determinarea coordonatelor
generalizate ale lantului cinematic fiind dati vectorii de pozitie ai extremitatilor acestuia. Plecand
de la aceste consideratii teoretice s-a realizat functia de pasire cu algoritmul pentru un pas de
robot.
Rezultatele teoretice obtinute in strategia de control a functiilor locomotorii au fost
confirmate prin simulare pe calculator in care s-a ales deplasarea uniforma a punctului
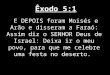
caracteristic al vehiculului M, pe un segment de dreapta. Simularea propriu-zisa se realizeaza in
urmatoarea ipoteza: l1=l2=l; h- cota lui M fata de sol, h=l; lungimea unui pas, d=l/2; a- cota
maxima de pasire , a=l/10. Reprezentarea configuratiilor piciorului se realizeaza in faza de
pasire, la 1/10 din intervalul de timp alocat pasirii (fig. 1).
timp
platforma
P
Vplatforma
Articulatiepicior
Centrugreutateplatforma
robot
Varf piciorrobot
Picior Liber Faza sprijin

3
3
Fig. 1. Reprezentarea grafica a un ciclu de pasire
Rezultatele teoretice obtinute in strategia de control a functiilor locomotorii au fost
confirmate prin simulare pe calculator.
S-a efectuat o analiza teoretica complexa asupra determinarii distribuţiei reale de
forţe în mecanismele picioarelor unui robot păşitor, care se deplasează în teren accidentat.
S-au definit sistemele de ecuatii care conduc la determinarea unei poziţii stabile a robotului
păşitor. S-au facut studii si cercetari teoretice referitoare la structura întărită de şase ori static
nedeterminată şi forţele de reacţiune în punctele de contact ale picioarelor cu terenul, prin
aplicarea metodei eforturilor:
S-a dezvoltat o strategie de control dinamic al mersului pentru roboţi pasitori
folosind ZMP şi informaţii inerţiale. Schema de control cuprinde generarea de modele ale
mersului compliante, compensarea ZMP în timp real într-o singura fază- faza de suport, cu
controlul amortizării articulaţiei piciorului, controlul unei pasiri stabile şi controlul poziţiei de
pasire bazat pe viteza unghiulară a platformei. În acest fel, robotul pasitor devine capabil să se
adapteze pe un teren denivelat, printr-un control in timp real, fără să-şi piardă stabilitatea în
timpul mersului. Pentru dezvoltarea unor noi capabilitati ale robotilor pasitori, cum ar fi mersul
pe panta, mersul prin depasirea sau ocolirea unor obstacole sunt necesare dezvoltarea unor
algoritmi inteligenti de inalt nivel. Aceasta deoarece mecanismul mersului este un process
complicat de înţeles, fiind un proces repetitiv de ‗înclinare‘ sau mişcări instabile care pot face ca
uneori, pe un teren denivelat, sa conduca la rasturnarea lui. Metoda aleasa, care se adapteaza
foarte bine la robotii pasitori modulari, este metoda punctului de moment zero ZMP (Zero
Moment Point).
Au fost realizate arhitectura sistemului si algoritmul de control pentu mersul
dinamic al robotului (fig.3) si s-a dezvoltat strategie de control al mersului care are la baza trei
moduri de control:
control al echilibrului robotului în timp real folosind feedback-ul sensorial
controlul schemei de mers - poate fi modificată periodic în funcţie de informaţiile
senzoriale din timpul fiecărui ciclu de mers;
controlul mişcării predictibile bazat pe o decizie rapidă din datele experimentale
anterioare.
CONTROL AL ECHILIBRULUI ROBOTULUI ÎN TIMP REAL. Pentru un robot
pasitor care se deplaseaza in panta sau pe un teren denivelat s-au dezvoltat 4 tipuri de bucle de

4
4
control online: controlorul de amortizare, control compensator ZMP, controlul orientării la
aterizare, controlorul timing la pasire.
CONTROLUL SCHEMEI DE MERS. Schema de control a modelului de mers conţine
două feluri de bucle de control online — controlorul amplitudinii balansului platformei şi control
avans/rotire al platformei.
CONTROLUL MIŞCĂRII PREDICTIBILE. Controlul mişcării predictibile se
bazează pe mişcările probabile ale robotului, fiind necesar sa prevenim mişcările anormale.
Aceasta înseamnă că anticipăm mişcările viitoare cu ajutorul informaţiilor experimentale
statistice şi apoi încercăm să prevenim condiţiile anormale prin controlul mişcărilor adiţionale. În
această metodă sunt 2 bucle de control online — bucla de control a poziţiei de aterizare şi
controlorul supra-inclinare prin prelucrarea semnalelor unor traductori inerţiali. Bucla de control
a poziţiei de aterizare este folosita să compenseze poziţia de contact pe pământ prin măsurarea
vitezei unghiulare.
platformei este esenţială pentru a mişca ZMP pe fiecare talpă în timpul mersului.
Au fost stabilite strategiile de programare pentru schemele de control raportate la
buclele de control si fazele mersului robotului, astfel: in controlul de balans in timp real se
realizeaza controlul de amortizare, compensarea ZMP, controlul orientarii la aterizare in fazele 1,
2 FSU, 3 si 4 FSU; in controlul mersului se realizeaza controlul amplitudinii si controlul
avansului/rotirii in fazele 2 FDS si 4 FDS; in controlul miscarii predictibile se realizeaza
controlul supra-aplecări robotului in faza 3 si controlul pasirii in fazele 1, 2 FSU si FDS, 4 FSU
si FDS, unde FSU şi FDS reprezinta: stare faza unic suport, respectiv faza dublu suport.
Tipurile de mers ale robotului sunt generate de trei programe-bloc, aflate in sistemul PC-OAH
şi anume: blocul de control al schemei de mers, care determină succesiunea şi modul de
deplasare a picioarelor; blocul de control al stabilităţii statice, care asigură deplasarea robotului
astfel încât proiecţia centrului de greutate al sistemului să rămână în interiorul poligonului
convex format de punctele de sprijin ale picioarelor; blocul de control al platformei care mentine
înălţimea prescrisa şi poziţia orizontala a platformei.

5
5
UTILIZAREA SENZORILOR DE FORTA PENTRU MERSUL ROBOTILOR
PASITORI MODULARI IN PANTA, DEPASIREA SAU OCOLIREA OBSTACOLELOR
S-a efectuat un amplu studiu asupra elementelor de baza in vederea determinarii
fortelor de reactiune din cuplele cinematice ale mecanismului piciorului unui robot pasitor.
Torsorul sistemului forţelor de reacţiune dintr-o cuplă cinematică, în ipoteza
simplificatoare a absenţei frecării dintre elementele adiacente, are două componente, şi anume:
forţa de reacţiune şi momentul de reacţiune. Aceste componente au un număr de proiecţii diferite
de zero, pe axele sistemului Denavit – Hartenberg din cupla respectivă, egal cu clasa cuplei. La
acestea se adaugă forţa de echilibrare sau momentul de echilibrare dacă cupla este motoare, de
translaţie, sau respectiv de rotaţie. Astfel, în cupla de rotaţie i se calculează trei componente ale
forţei de reacţiune şi două componente ale momentului de reacţiune, de-a lungul axelor OXi şi
OYi. În mod asemănător, în cuple de translaţie i, se calculează două componente ale forţei de
reacţiune, de-a lungul axelor OXi şi OYi, şi toate componentele momentului de reacţiune. Pentru
o forţă 111 kFjFiFF ZYX , definită prin componentele pe axele sistemului O1X1Y1Z1
anexat platformei robotului şi aplicată în punctul de sprijin P, rezultă valoarea torsorului
reactiunii din cupla 1, de-a lungul axei O1X1, deplasarea virtuală 1X :
.1111 ZPYPXPX FZFYFXR
care poate fi determinat din relatia:
.
10
1
4
4
4321
1
1
1X
Z
Y
X
Z
Y
X
P
P
PRX
P
P
PAAAQ
in care QRX este un operator al deplasarii virtuale, 1 2 3A A A matricele de transformare Denavit –
Hartenberg. În mod asemănător, proiecţia pe axa O2X2 a momentului de reacţiune din cupla
cinematică 2, ecuaţia (3) are forma:
,
10
2
4
4
4321
1
1
1X
P
P
PMX
P
P
PM
Z
Y
X
Z
Y
XAAQA
respectiv, momentele reactiunilor sunt: .1112 ZPYPXPX FZFYFXMR
Pentru robotii modulari MERO a fost conceput si experimentat un program de
calcul al fortelor de reactiune in articulatiile robotului in functie de o sarcina unitara data,
relatii necesare pentru proiectarea si controlul compliant al robotilor pasitori .

6
6
S-a dezvoltat o noua solutie constructiva, cu un grad ridicat de inovare, impreuna cu
arhitectura sistemului de comanda pentru robotii pasitori modulari care are la baza un
brevet european. Picioarele roboţilor păşitori în general trebuie să fie astfel realizate încât aceştia
să se poată deplasa cu un mers uniform şi rapid, asemănător cu mersul uman, în orice condiţii,
indiferent daca terenul este plat sau cu denivelari. Este de dorit ca robotul să aibă tălpile
picioarelor adecvate mersului pe orice fel de suprafeţe. Dacă tălpile picioarelor nu au forme
corespunzătoare, care să se adapteze terenului neregulat, atunci acestea nu sunt apte să aplice
terenului forţele motoare necesare deplasării, rezultând o forţă de reacţiune insuficient de mare
din partea terenului. Astfel, este imposibil de a se controla cu precizie poziţia şi direcţia de
înaintare, robotul face paşi greşiţi în teren şi se împiedică. Când talpa piciorului unui robot
păşitor se aşează pe teren, ea suferă un şoc mai mult sau mai puţin puternic datorită forţei de
reacţiune din partea terenului. Este necesară amortizarea şocului datorat forţei de reacţiune din
partea terenului, la contactul cu talpa piciorului robotului, pentru a se putea transmite forţele
necesare in cuplele motoare, în scopul menţinerii poziţiei dorite a corpului robotului si în
concordanţă cu mişcările periodice de păşire ale picioarelor.
S-au conceput variante simplificate in care numai primul modul, care reprezinta picioarele
din fata ale robotului pasitor, este echipat cu traductori, celelalte picioare urmand sa fie dotate cu
un numar redus de traductoare necesare realizarii masuratorilor ZMP si a sarcinilor externe.
Robotul păşitor echipat cu astfel de picioare poate păşi uniform şi repede şi – de asemenea – cu o
eficacitate sporită a consumului de energie în faza de transfer a piciorului.
S-au determinat experimental fortele de reactiune din punctele de contact cu terenul
pentru picioarele robotilor pasitori modulari. Distribuirea reacţiunilor în punctele de sprijin
este una din problemele cheie la organizarea mişcării robotului păşitor pe teren cu relief
complicat. Conurile de frecare în punctele de sprijin pe terenuri denivelate pot fi orientate
suficient de arbitrar, iar înseşi punctele de sprijin pot să nu aparţină simultan unui plan. Ca
premiza pentru posibilitatea rezolvării problemei distribuţiei raţionale a reacţiunilor serveşte
nedeterminarea statică. Se presupune că, fiecare picior al robotului se sprijină pe suprafaţă într-
un punct. Se analizează problema organizării paşilor dinamici ai robotului încât stabilitatea
statică să fie asigurată în fiecare moment de timp. Controlul mişcării robotului păşitor poate fi
descompus în două procese complementare: controlul ţinutei si controlul activ. Controlul ţinutei
se utilizează pentru a menţine înclinaţia corpului într-o orientare dorită astfel ca proiecţia
greutăţii să se facă în poligonul de sprijin. Controlul activ este asigurat prin senzorii de contact şi
senzorii care măsoară forţa de contact a fiecărui picior cu solul. Controlul activ extins şi în

7
7
articulaţiile platformei creează premizele unui control prin forţă al robotului păşitor la deplasarea
pe terenuri neregulate.
S-a obtinut un traductor de forta pentru controlul miscarii robotilor păşitori modulari
MERO in care valoarea lui cit este suficient de mare, pentru a fi achiziţionată şi prelucrată de
sistemul de comandă şi control HFPC. Se observa obtinerea unei deformatii specifice care prin
amplificare si formatare printr-o punte Wheatstone a condus la generarea unui semnal de iesire
cu liniaritate satisfacatoare pentru asigurarea unei conversii cu precizie de 10 biti. Aceasta eroare
de masura este suficient de mica pentru a nu influenta controlul miscarii in bucla al robotului
pasitor.
INTEGRAREA SISTEMULUI DE CONTROL
Sistemul de control este distributiv, deoarece el are multe articulaţii, senzori şi
echipamente periferice, cum ar fi: retea de comuncatii LAN pentru comunicari off-line, retea de
comunicatii rapida CAN pentru control in timp real, module de interfaţă digitale si analogice,
etc.
Prin folosirea arhitecturii de control distributive, încărcarea informaţională a controlerului
principal a fost efectiv diminuată. Pentru aceasta a trebui să se dezvolte sisteme slave de control
şi linii de comunicaţie între sistemul de control principal (master) şi sistemele slave. Sistemul
HFPC a fost conceput in structura distribuita si descentralizata pentru a permite dezvoltarea cu
usurinta a unor aplicatii noi sau suplimentarea cu noi module hardware sau software pentru noi
functii de control.
In baza studiilor si analizelor realizate a fost completata arhitectura sistemului de
control compliant cu functii de urmarire a robotilor pasitori HFPC prin implementarea a
numeroase bucle de control in diferitele faza de mers ale robotului care asigura dezvoltarea de
noi capabilitati tehnologice, cu adaptarea pasirii robotului la mersul pe terenuri in panta, cu
obstacole respectiv denivelari. In acest sens, a fost studiat si analizat un nou algoritm de control
al mersului dinamic pentru roboţii bazat pe instrumente senzoriale cum ar fi forţa/cuplul şi
senzori inerţiali. Sistemul de control a fost conceput prin proiectarea tuturor structurilor
mecanice şi echipamentelor hardware, incluzând controllerii actuatoarelor şi dispozitivele cu
traductoare de forta. Arhitectura de control a sistemului distribuit a fost integrată in arhitectura
HFPC astfel încât să poată fi controlată cu bună eficienţă şi performanţă.
Factorii esenţiali pentru generarea modelului de mers au fost definiţi şi cuantiifcaţi prin
studiile si cercetarile asupra mişcărilor omului şi experimentele de mers ale lui robot pasitor. In
paralel a fost proiectat modelul standard de mers pentru mersul înainte şi au fost definite fazele

8
8
de mers prin împărţirea modelului de mers în 5 faze distincte. Din punct de vedere al controlului
miscarii robotului pasitor au fost stabilite 3 tipuri de modele de control cu scopul de a proiecta
buclele de control online pentru un mers stabil. Controlori online au fost proiectati conform
obiectivelor schemelor de control şi planificaţi în fazele de mers. S-a obtinut in final, algoritmul
de control al mersului, care a fost integrat structurii mecanice ale robotului. Proiectarea tălpii a
fost actualizată atfel incat să facă faţă condiţiilor unui sol denivelat. Din analizele efectuate a
rezultat eficienţa strategiei propuse de control al mersului unui robot pasitor cu aplicare la
robotul modular MERO.
NOI METODE DE CONTROL FUZZY “MULTY-STAGE”
DEZVOLTAREA SISTEMULUI HFPC PRIN MODELAREA MATEMATICA A
POZITIEI CENTRULUI DE GREUTATE AL ROBOTULUI
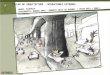
S-a efectuat modelarea matematica a pozitiei centrului de greutate, care permite
controlul roboţilor păşitori la deplasarea pe terenuri cu configuraţie complicată.
S-au determinat relatia pentru coordonatele poziţiei centrului de greutate al robotului,
necesare controlului in timp real a stabilitati robotului, conform relatiei:
6
1
3
1
6
1
3
1
0
i j
ij
i j
ij
kij
kO
kG
m
GXmXm
X
unde, Xk ={X, Y, Z} (k=1.2.3.), j=1-4 iar i=1-6 pentru varianta de robot păşitor hexapod şi i=1-4
pentru varianta de robot păşitor patruped. Cunoscând poziţia centrului de greutate, s-au
determinat prin derivare viteza kGX şi dubla derivare, acceleratia k
GX .

9
9
Z6
2
1
2
3
4
5
6
Z1
2
1
Z 1
Z 13
P
P
N
T1
1
_
__N
P T_
3
3
P
N_
T_
4
4
Z12
Z32
1Z
1Z
1Z 4
5
6
N_
N_
5
6
T_
T_
6
5
P
P
Z63
T_
2
Figure 18. Modelarea matematica a centrului de greutate pentru robotul pasitor modular MERO
Mentinerea verticalei centrului de greutate in suprafata de suport, este cu atat mai dificila daca
robotul se deplaseaza pe o panta. In acest caz mentinerea stabilitati depinde de sarcina
transportata (fi) si de distanta XC de la suprafata punctelor de sprijin la centru de greutate.
Stabilitatea se obtine prin reducerea componentei XC la cresterea sarcini fi, in functie panta de
deplasare a robotului.
S-a dezvoltat o noua metoda de control care elimina practic instabilitatile si care are
un raspuns rapid al buclei de control . Aceasta consta intr-un control fuzzy ―multi-stage‖ (MS)
care presupune realizarea a doua bucle de control fuzzy, una in pozitie si alta in forta, pe doua
niveluri (―stage‖) de decizie diferite pentru a determina distanta XP de la suprafata punctelor de
sprijin la centru de greutate, in vederea cresterii stabilitatii. Controlul fuzzy MS are baze de
reguli multiple unde rezultatul unei inferente a bazei de reguli este transmis la urmatorul nivel. In
acest mod dimensiunile cele mai importante ale inferentei pot fi grupate in seturi mai mici si
combinate cu regulile de baza. In structura MS rezultatele bazei de reguli ale controlului de
pozitie P sunt transmise la baza de reguli de control poziie-forta PF.
S-au defint sarcinile controlerului, forma regulii de decizie si a variabilelor fuzzy folosite
in luarea deciziilor. Valorile abaterilor detectate prin senzori au fost cuantificate intr-un numar de
puncte corespunzator elementelor universului de discurs, iar apoi valorile s-au alocat drept grade
de apartenenta in cateva subseturi fuzzy. Relatiile dintre intrari, de exemplul abaterile masurate,
sau iesiri, ca de exemplul vitezele, si gradul de apartenenta au fost definite in conformitate cu
experimentele efectuate si cerintele sarcinii. S-au ales valorile fuzzy dupa cum urmeaza: NM –
negativ mare, NM – negativ mediu, Nm – negativ mic, ZO- zero, Pm– pozitiv mic, PM – pozitiv
mediu, PM – pozitiv mare. Rezultatul inferentei logice s-a aplicat modului de defuzificare.
Alegand ca metoda de defuzificare metoda centrului de greutate a ariei, s-au determinat iesirile
pentru un univers de discurs discret al iesirilor.

10
10
DEZVOLTAREA UNOR NOI METODE FUZZY MULTY-STAGE PRIN
UTILIZAREA MODELELOR DINAMICE IN CONTROLUL COMPLIANT
AL ROBOTILOR PASITORI MODULARI
Avand ca punct de pornire metoda fuzzy multi-stage prezentata in capitolul anterior s-au
efectuat analizele mai multor metode de control compliant, care au condus la dezvoltarea unei
noi metode pentu controlul compliant al robotilor pasitori modulari HFPC,
S-a efectuat modelarea cinematică a punctelor de sprijin. Modelarea cinematica
inversa a mecanismelor picioarelor si modelarea cinematica directa si inversa a punctelor de
sprijin Pi ale picioarelor au fost studiate si analizate pe larg in fazele 1 si 2 ale proiectului. In
aceasta faza s-a pus acentul pe controlul compliant al miscarii robotilor pasitori modulari HFPC-
MERO prin utilizarea modelelor dinamice in bucla de control, care au fost implementate in
schema de control fuzzy multi-stage.
S-au analizat mai multe scheme de control compliant in vederea obtinerii unor
performante cat mai ridicate in controlul traiectoriei robotului, care genereaza parametrii de
pozitie si forta pentru controlul fuzzy multi-stage, printre care unele care includ un model
dinamic in bucla de control, metoda spatiului operational, controlul impedantei si unele care nu
includ modele dinamice: controlul hibrid (Railbert si Craig) si controlul rigiditatii (Salisbury).
Sunt prezentate analizele de stabilitate si implementarile experimentale ce demonstreaza nu
numai ca folosind modele dinamice se ajunge la un control mai precis, dar si ca folosirea unui
model dinamic neadecvat poate duce in anumite cazuri la un control instabil al fortei. Prin
controlul compliant se realizeaza controlul hibrid al pozitiei si fortei in coordonate carteziene,
unde unele directii sunt controlate prin pozitie iar altele sunt controlate prin forta. Rationamentul
pentru controlul cartezian al fortei este ca geometria lumii inconjuratoare defineste un set de
coordonate naturale ce pot fi partitionate in variabile controlate prin forta si variabile controlate
prin pozitie (Mason; Lipkin si Duffy). Controlul astfel definit este dat in functie de aceste
variabile. Separarea variabileleor de forta de variabilele de pozitie este indicata printr-o matrice S
(Raibert si Craig 1981).
S-au realizat urmatoarele analize de stabilitate pentru controlul hibrid al robotilor:
Analiza stabilitatii controlului hibrid pentru cazul in care piciorul robotului este in
spatiu liber si nu interactioneaza cu mediul.
Analizele controlului hibrid cu criteriul Routh in conditii de instabilitate.

11
11
Analizele controlului hibrid pentru piciorul robotului in contact cu un teren rigid.
Analiza stabilitatii controlului cu acceleratie solutionata pentru cazul in care piciorul
robotului este in spatiu liber si nu interactioneaza cu mediul.
Analizele controlului cu acceleratie solutionata pentru piciorul robotului in contact
cu un teren rigid..
S-a efectuat un studiu comparativ al performantelor metodelor de control compliant
prezentate.
S-a conceput si dezvoltat o noua metoda fuzzy multi-stage prin utilizarea controlului
cu acceleratie solutionata al robotilor pasitori modulari.
APLICATIE DE SIMULARE A ROBOTILOR PASITORI PRIN PROIECTIE
VIRTUALA.
Aplicatia are ca scop generarea, vizualizarea si trimiterea de referinte robotului pasitor format
din 3 module a cate 2 picioare fiecare, pozitionate in colturile unui triunighi. Deoarece mersul
adoptat este tripod (trei picioare, cate unul de la fiecare modul, se misca pe aceeasi traiectorie
simultan), traiectoriile ce vor fi introduse de catre utilizator manual sau receptionate prin
transmisie seriala sub forma unui fisier, au in vedere un singur modul format din 2 picioare,
miscarea celorlalte 4 picioare facandu-se respectiv similar cu acestea. La acest mers apar doua
situatii: platforma se deplaseaza discret pe intervale de miscare avand si puncte in care
stationeaza, respectiv platforma se deplaseaza cu o viteza constanta pe tot timpul in care
picioarele isi urmaresc traiectoriile.
Aplicatia contine doua sectiuni cu cele 2 picioare afisate in 2D vazute din lateral pentru o mai
buna observare a miscarii, sectiuni ce includ si posibilitatea de a seta starea fiecarui picior,
respectiv varful definit ca punct fix sau extremitatea conectata la platforma definita ca punct fix,
ambele raportate la sistemul de axe al piciorului. Abordarea se face rapordat la sistemul de axe al
piciorului deoarece in cazul al doilea, daca platforma este in miscare, putem considera punctul
dintre picior si platforma ca un punct fix virtual, varful miscandu-se in raport cu platforma.
Aplicatia contine si o reprezentare 3D a robotului pasitor cu posibilitatea de vizualizare a
traiectoriilor, a deplasarilor si a rotirii cadrului. Daca se opteaza ca platforma sa aiba o viteza
constanta, aceasta inregistreaza in unitati de masura/pachet de date de referinta (de exemplu,
platforma poate inainta 1 mm la fiecare set de referinte trimis catre robot). In acest caz, platforma
se va deplasa atunci cand varfurile ambelor picioare vor fi considerate puncte fixe. Se considera
sistemul de referinta la care se raporteaza miscarea fixata in centru de greutate, fara sarcina, al
platformei. Traiectoriile ambelor picioare sunt construite din segmente introduse manual sau

12
12
prin coordonate de puncte in mm receptionate prin transmisie seriala sub forma unui fisier,
relative la un sistem de axe atasat varfului, piciorului daca acesta nu este fix, sau platformei daca
varful piciorului este fix. Segmentele se pot adauga unul cate unul, alcatuind o traiectorie vizibila
prin reprezentarea 2D cat si in 3D. Este disponibila si o optiune de UNDO ce va sterge din
traiectorie ultimul segment introdus.
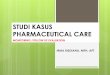
Fig. 29. Contolul miscarii robotilor pasitor cu vizualizare prin proiectie in 2D
Viteza de deplasare a piciorului in u.m./pachet de date de referinta poate de asemenea sa fie
setat. (de ex. 1 mm la fiecare set de date). Avand traiectoriile complete, se poate opta pentru
generarea de referinte (generarea de unghiuri pe 16 biti aferente fiecarei articulatii pentru ca
robotul sa urmareasca traiectoriile definite cu variabilele setate).
Fereastra de control contine in partea superioara:
sectiunea ce faciliteaza deschiderea unui fisier xls ce contine unghiurile fiecarei cuple si
deplasarea robotului pe baza acelor unghiuri, avand si un buton de refresh al ferestrei
grafice si unul pentru revenirea la pozitia initiala;
sectiunea de dimensionare a picioarelor robotului in cm;
sectiunea de fixare a punctului Look-at al camerei ferestrei grafice, cu incrementari (+) si
decrementari (-) pe cele 3 axe.
si un text-box unde poate fi setat delay-ul in ms intre doua miscari ale robotului.
In partea mediana a ferestrei de control exista sectiunea ―Generare referinte‖ compusa din:

13
13
doua text-box-uri ce pot stabili viteza de deplasarea a platformei robotului in cm/pas si
pasul de interpolare a traiectoriei citite dintr-un fisier xls.
un buton de deschidere a unui fisier xls ce contine o traiectorie pe care o vor urma
picioarele robotului;
un buton de interpolare ce imparte traiectoria din fisier in segmente de marimea stabilita
prin pasul stabilit anterior
a) Fereastra control simulare robot
b) Robot in pozitie de start
c) Vizualizare urma miscare cu camera lateral
dreapta
d) Vizualizare urma miscare cu camera lateral
dreapta si zoom
Fig.30. Fereastra control miscare roboti pasitori modulari HFPC-MERO
un buton de generare unghiuri cuple pe baza pozitiei platformei si a pozitiei varfurilor
picioarelor pe traiectoria incarcata;

14
14
un buton de parcurgere grafica in mediul virtual al traiectoriei, cu optiunea de a face un
trace al miscarii;
si doua butoane ce permit transmiterea unghiurilor prin protocolul RS232 sau UDP la
robotul fizic.
De asemenea fereastra de control contine si doua sectiuni de configurare a protocoalelor RS 232
si UDP. Seturile de date fiind generate pot fi trimise la robot prin 2 protocoale:
RS-232 trimitandu-se 2 octeti (valoarea unghiului pe 16 biti) pentru fiecare articulatie in
parte intr-o ordine predefinita, putandu-se seta portul RS-232, viteza precum si ceilalti
parametrii aferenti comuticatiei prin acest tip de protocol.
UDP unde aceleasi date sunt transmise in functie de structura dispozitivelor de comanda,
impachetate comform protocolului, la 1 sau mai multe adrese IP.
Suplimentar se asigura si importarea unei curbe de traiectorie dintr-un fisier intr-un anumit
format.
Capturile de ecran prezentate in figura sunt rezultate obtinute prin simulare pe calculator si
reprezinta vizualizarea din mai multe unghiuri a robotului pasitor in doua ipostaze: in pozitie
initiala, considerata cu unghiurile cuplelor PI/4 si o pozitie intr-un punct intermermediar al unei
secvente de miscare, capturile la care este vizibil trace-ul miscarii (fig. 29).
Fiecare captura de ecran contine doua ferestre: una de control al aplicatiei si una de vizualizare a
robotului intr-un plan virtual tridimensional, cu camera orientabila cu ajutorul mouse-ului,
construit pe baza tehnologiilor DirectX si Direct3D.
Asa cum rezulta si din sinteza lucrarii, obiectivele etapei au fost indeplinite.
Rezultatele obtinute indreptatesc echipa de cercetare sa considere ca poate trece cu succes la
realizarea etapei din 2010 in controlul robotilor modulari pasitori HFPC MERO. Studiile si
cercetarile membrilor echipei au stat la baza a numeroase articole publicate in conferinte
internationale cotate ISI, reviste cotate ISI sau in baze de date internationale si asigura premizele
publicarii unor viitoare articole cu impact in domeniul temei proiectului.
Rezultatele obtinute au asigurat vizibilitate echipei de cercetare si impact prin
publicarea sau acceptarea spre publicare a 48 lucrari din care 2 in reviste ISI, 6 in reviste cu
BDI (INSPEC), publicarea unui capitol de carte in Springer Verlag, publicarea/acceptarea spre
publicare a 3 monografii, 19 articole in ISI Proceedings, 3 in reviste nationale recunoscute
CNCSIS sau ale Academiei Romane, alte 11 articole publicate sau acceptarea spre publicare in
conferinte de specialitate, conferinte desfasurate sub egida Academiei Romane sau proceedings
editate in edituri recunoscute. Membrii echipei de cercetare au primit 7 premii

15
15
internationale/medalii de aur acordate de asociatii profesionale si institutii de prestigiu in
urma unui proces demonstrabil de evaluare internationala. Participarea la Salonul Mondial
de Inventica Geneva, 2009 a fost obtinuta prin competitie organizata de ANCS.
Responsabilul de proiect este editor a 11 proceedings publicate sau acceptate spre publicare
pe durata desfasurarii acestei faze si chairman a 9 conferinte internationale cotate ISI, IEE,
ELSEVIER, CSA. Membrii echipei au participat la o propunere de proiect FP7: titlul ¨ Open
Architecture Systems for Nano-Micro Manipulators Working in a Cooperative Regime¨ ,
Acronym: ARMSCOR, Cal FP7-NMP-2009-SMALL-3, Theme 4 – NMP - Nanosciences,
Nanotechnologies, Materials and new Production Technologies, Work programme topics:
NMP-2009-3.2-2 Adaptive control systems for responsive factories, ID 246003. Impactul
activitatii de cercetare este dat si de interesul manifestat de colaborare prin schimb
interuniversitar/interacademic cu Universitatea din Mexico City, si colaborare in proiecte
europene cu alte 7 universitati recunoscute la nivel european: Staffordshire University, UK,
University Politecnica of Valencia, Spain, Belfort Montbéliard University, FR., Institute for
Information Technology, DE, City University, UK, CEDRAT Technologies, FR., University of
Amiens, FR., Industrial Systems Institute, GR.
REZULTATELE STUDILOR SI CERCETARILOR ECHIPEI DE CERCETARE
Rezultatele studilor si cercetarilor echipei de cercetare, corespund rezultatelor
planificate ale proiectului, fiind publicate sau acceptate pentru publicare un numar de 48 lucrari
din care amintim:
1. Luige Vladareanu, Ovidiu I. Sandru, Lucian M. Velea, Hongnian YU, The Actuators
Control in Continuous Flux using the Winer Filters, Proceedings of Romanian Academy,
Series A: Mathematics, Physics, Technical Sciences, Informantion Science, Volume: 10
Issue: 1 Pg.: 81-90, 2009, ISSN 1454-9069, cotata ISI, cu factor de impact,
http://www.ear.ro/3brevist/rv1/rv1.htm
2. S. Cononovici, A. Curaj, An approach to walking robots planning and control,
Proceedings of Romanian Academy, Series A: Mathematics, Physics, Technical
Sciences, Informantion Science, cotata ISI, cu factor de impact, acceptata pentru
publicare in 2010, http://www.ear.ro/3brevist/rv1/rv1.htm
3. Luige Vladareanu, Ion Ion, Marius Velea, Daniel Mitroi, The Robot Hybrid Position and
Force Control in Multi-Microprocessor Systems, WSEAS Transation on Systems, Issue

16
16
1, Vol.8, 2009, pg.148-157, ISSN 1109-2777, BDI Journals – INSPEC,
http://www.wseas.us/e-library/transactions/systems/2009/31-759.pdf
4. Ion Ion, Luige Vladareanu, Ion Simionescu, Aurelian Vasile, The Structure of
Modular Walking Robot MERO Displacement Systems, Support of the Heavy Load
Transportation, WSEAS Transactions on Systems and Control, Issue 1, Vol. 4, 2009, pg.
35-44, ISSN: 1991-8763, BDI Journals – INSPEC, http://www.wseas.us/e-
library/transactions/control/2009/31-760.pdf
5. Ion I, A. Marin, A. Curaj, L. Vladareanu - Desing and Motion Synthesis of Modular
Walking Robot MERO, Journal of Automation, Mobile Robotics_Intelligent Systems,
vol.2, no.4, 2008, pg. 25-30, ISSN 1897-8649, BDI SCOPUS,
http://www.jamris.org/issue_04_2008.php?p=25
6. LLuuiiggee VVllaaddaarreeaannuu,, IIoonn IIoonn,, MMiihhaaii MMuunntteeaannuu,, DDaanniieell MMiittrrooii,, ¨̈MMEERROO MMoodduullaarr
WWaallkkiinngg RRoobboottss CCoonnttrrooll,, RReevvuuee RRoouummaaiinnee ddss SScciieenncceess TTeecchhnniiqquueess sseerriiee ddee ¨̈MMeeccaanniiqquuee
AApppplliiqquueeee , no.1, tome 53, jjaannvviieerr--aavvrriill 22000088,, EEddiittuurraa AAccaaddeemmiieeii RRoommaannee,, pprr..5555--6633,,
IISSSSNN:: 00003355--44007744,, hhttttpp::////wwwwww..eeaarr..rroo//33bbrreevviisstt//rrvv5511//rrvv5511..hhttmm
7. Vladareanu L., L. M. Velea, R. Munteanu, A. Curaj, Mihai Munteanu, et. All., Real
time control method and device for robot in virtual projection, inventie inregistrata EU,
patent no. EPO-09464001, Mai 2009.
8. Radu I. Munteanu, L. Vladareanu, O.I. Sandru, LMVelea, Hongnian Yu, N. Mastorakis,
et.all., Metoda si dispozitiv de actionare si control al robotilor mobili inertiali, propunere
brevet OSIM, nr. A00626/07.08.09
9. L. Vladareanu, L. M. Velea, R. Munteanu, et. all., Metodă şi dispozitiv de măsurare a
vitezei de rotaţie in mediu puternic perturbant, brevet OSIM nr.122380 din Ian. 2009
10. Medalie de aur la ¨Salon International des Inventions¨, Geneve, 37th
Edition, 1 – 5
Aprilie 2009, Geneva, Elvetia, pentru ¨Real time control method and device for robot in
virtual projection¨
11. Premiu international cu ocazia ¨Salon International des Inventions¨, Geneve, 37th
Edition, 1 – 5 Aprilie 2009, Geneva, Elvetia acordat de Ministry of Industry and Trade of
Russian Federation, The Radio Electronics Industry Department.
12. Medalie de aur la Salonul International de inventica: INNOVA ENERGY, 13-15
Noiembrie 2008 la Bruxelles, BELGIA, « «Method and devices for Real Time control of

17
17
the Actuators »
13. Premiu international ¨CPExposition 2008¨ acordat de organizatorii Salonului
International de inventica: INNOVA ENERGY, 13-15 Noiembrie 2008 la Bruxelles,
BELGIA
14. Plenary Lecture: The 8th International Conference on Applications of Electrical
Engineering (AEE ‘09), Houston, USA , April 30-May 2, 2009
15. Cercetator invitat la Universidad Autónoma Metropolitana-Azcapotzalco, Mexico City
cu prelegerea (mini-curs) Applied Control Theory: ¨ Real Time Control in Solid
Mechanics¨
Trei din membrii echipei de cercetare, Luige Vladareanu, Lucian Marius Velea si Mihai
Munteanu, in calitate de autori ai brevetului ¨Method et dispositif de controle en temps reel
d‘actuatoires ¨, au primit o medalie de aur la Salonul Mondial al Inventatorilor de la Geneva
2009 si un premiu international din partea Federatiei Ruse. Intreaga activitate desfasurata
pentru diseminarea rezultatelor cercetariilor si cresterea vizibilitatii echipei de cercetare
sunt prezentate in anexa sintezei proiectului.